a strain space nonlinear kinematic hardening/softening plasticity model
TRANSCRIPT
A strain space nonlinear kinematichardening/softening plasticity model
Haiyang Wang, M.E. Barkey*
Aerospace Engineering and Mechanics Department, The University of Alabama, Box 870280, Tuscaloosa,
AL 35487-0280, USA
Received in revised form 7 February 1999
Abstract
A strain space plasticity theory based on the nonlinear kinematic hardening and softening
rule is developed in order to accommodate work-hardening, work-softening, and elastic-per-fectly plastic materials with one set of constitutive equations, and to facilitate strain controlledcalculations. A generalized hardening/softening parameter is proposed, and the potential of
linking the parameter to micro-mechanical material changes is discussed. The theory is usedto investigate work-softening materials numerically and highlights a need for additionalexperimental results in this area. # 1999 Elsevier Science Ltd. All rights reserved.
Keywords: B. Elastic material; Strain space
1. Introduction
The Armstrong-Frederick type of nonlinear kinematic hardening models arereceiving increasingly more attention because of their enhanced performance inpredicting ratchetting and other transient behavior (Chaboche, 1991, 1994; Ohnoand Wang, 1993a,b; McDowell, 1994; Jiang and Sehitoglu, 1996a,b). The Arm-strong-Frederick family of plasticity models are stress space based models, andtherefore the applications of the models are limited to work-hardening materialsonly. The key element in these plasticity models is the nonlinear kinematic hard-ening rule. This rule speci®es the evolution of the hardening parameter �ij (the centerof the yield surface) in stress space.To facilitate strain controlled calculations, the strain space formulation of the
Armstrong-Frederick family of models was developed by Wang and Barkey (1998).
International Journal of Plasticity 15 (1999) 755±777
0749-6419/99/$ - see front matter # 1999 Elsevier Science Ltd. All rights reserved.
PI I : S0749-6419(99 )00019 -4
* Corresponding author. Tel.: +1-205-348-1621; fax: +1-205-348-2094.
E-mail address: [email protected] (M.E. Barkey)

It was demonstrated that the strain space formulation is equivalent to the stressspace based Armstrong-Fredrick family of models in the case of work-hardeningmaterials. This suggests that the strain space version retains the achievements of theArmstrong-Fredrick family of plasticity models. At the same time, it stimulates the
Nomenclature
c q� �r q� � qth material constants in stress space nonlinear kinematichardening rule
d; @ di�erential operator�ij unit normal of yield surface in strain spacep equivalent plastic strainD;Dperf ;D total plastic compliance, non-hardening plastic compliance,
and hardening/softening compliance function, respectivelyG shear modulus of elasticityKp plastic modulus functionÿ
q� �ij unit tensor of
q� �ij
M number terms in the nonlinear kinematic hardening rule
sij deviatoric stress tensor, sij � �ij ÿ 1
3�kk�ij
�q� �ij ; �ij qth and total backstress tensor in deviatoric stress space�ij backstrain tensor in deviatoric strain space
�ij Kronecker delta �ij � 0 i 6� j1 i � j
:
�eO yield strain in the strain space yield function, eO � O���
2p
eij elastic deviatoric strain tensor"ij strain tensor
"0ij deviatoric strain tensor, "0ij � "ij ÿ1
3"kk�ij
"pij plastic strain tensor
q� �ij ; ij qth and total general hardening/softening tensors, respec-
tively O yield strain in shear, O � �O
Gf; ' yield functions in stress and strain spaces
fq� �1 ; f
q� �2 ; '
q� �1 ; '
q� �2 qth functionals in stress and strain spaces for nonlinear
kinematic hardening and softening rules, respectively�ij stress tensor�O yield stress in shear
� q� �; � q� � qth constants in strain space hardening rule q� � qth material constants for ratchetting or mean stress
relaxation�j j absolute value of a scalar�k k norm of a tensor, de®ned as �ij
� �����������ij�ijp
756 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

idea of a more general kinematic hardening rule which will be able to accommodatework-hardening, work-softening, and elastic-perfectly plastic materials. The followingis an investigation of a more general plasticity model proposed in strain space. Thestrain space yield surface and kinematic hardening and softening rule will be investi-gated in the following discussion carried out in deviatoric stress and strain spaces.
2. Yield function and hardening parameter in strain space
The yield behavior of materials has been initially and conventionally studied instress space. Knowledge about the shape, orientation, translation and deformationof the yield surface in stress space has been well investigated and established. Theconvexity of the strain space yield surface and normality ¯ow rule can be deduceddirectly from Il'yushin's stability postulate (Il'yushin, 1960, 1961). However, littleexperimental observation of the yield behavior has been conducted directly in strainspace.Nevertheless, the yield surface can be transformed into strain space from its stressspace counterpart (Yoder 1981; Yoder and Iwan, 1981; Casey and Naghdi, 1983a).For instance, if the von-Mises yield criterion
f � sij ÿ �ijÿ �
sij ÿ �ijÿ �ÿ 2�2O � 0; �2:1�
is employed, the yield function in strain space can be obtained as follows:
' � "0ij ÿ �ij� �
"0ij ÿ �ij� �
ÿ e2O � 0 �2:2�
where �ij is termed as the backstrain tensor (the counterpart of �ij in stress space) and
�ij � "pij ��ij2G
� ��2:3�
due to the transformation. The term eO � O��2p , where O � �O
G is the initial yield strain
in shear. Because of the stress space hardening parameter �ij in Eq. (2.3), this back-strain holds for work-hardening materials only. There are several types of hardeningrules to specify the evolution of the backstress such as the Mroz (1967) ``imagepoint'' hardening rule, Tseng and Lee (1983) ``image point'' hardening rule, the lin-ear kinematic hardening rule (Prager, 1955; Ziegler, 1959), and the nonlinear kine-matic hardening rule. Here we will examine the recent nonlinear kinematichardening rules (Chaboche, 1991, 1994; Ohno and Wang, 1993a,b; McDowell, 1994;Jiang and Sehitoglu, 1996a,b).The backstrain can be further generalized as
�ij � "pij � ij �2:4�
The term ij is the generalized hardening/softening parameter. The generalizedhardening parameter ij with the yield function of Eq. (2.2) and a suitable hardening
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 757
rule can accommodate work-hardening, work-softening, and elastic-perfectly plasticmaterials. Therefore, this formulation is more general than its stress space counter-part. The backstrain tensor expression [Eq. (2.4)] also reveals the fact that thebackstrain tensor is the summation of the plastic strain tensor and the generalhardening parameter ij while in stress space, the hardening parameter �ij and thebackstress tensor are the same.For stress space plasticity models, the hardening parameter, �ij, is intended to
model the macroscopic e�ect of microstuctural changes in the material (i.e. crystal-lographic slip in polycrystalline metals). In this manner, the hardening of materialscan be phenomenologically modelled. However, because this internal variable is castin terms of stress, it is typically only indirectly inferred from test measurements.The proposed generalized hardening/softening parameter cast in strain space
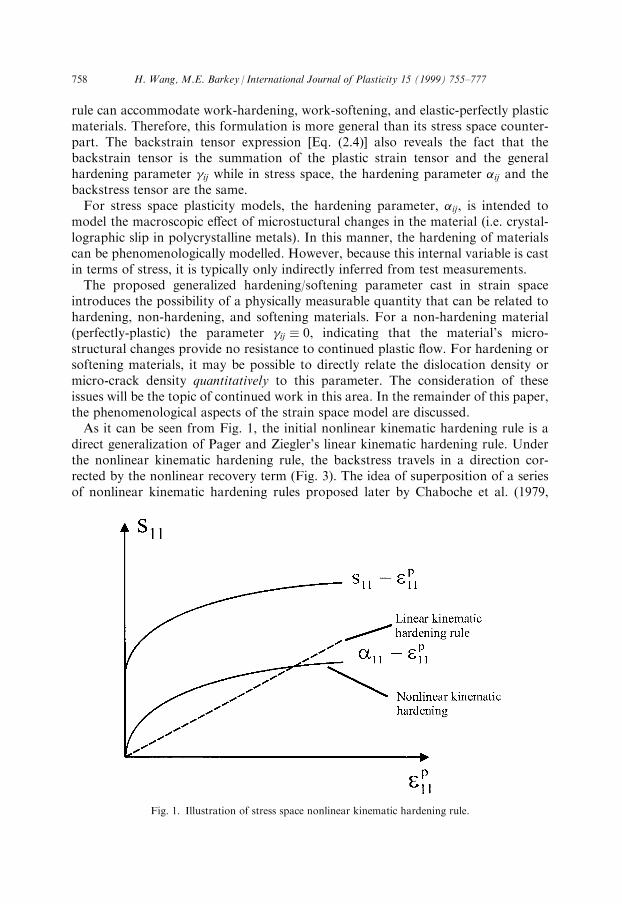
introduces the possibility of a physically measurable quantity that can be related tohardening, non-hardening, and softening materials. For a non-hardening material(perfectly-plastic) the parameter ij � 0, indicating that the material's micro-structural changes provide no resistance to continued plastic ¯ow. For hardening orsoftening materials, it may be possible to directly relate the dislocation density ormicro-crack density quantitatively to this parameter. The consideration of theseissues will be the topic of continued work in this area. In the remainder of this paper,the phenomenological aspects of the strain space model are discussed.As it can be seen from Fig. 1, the initial nonlinear kinematic hardening rule is a
direct generalization of Pager and Ziegler's linear kinematic hardening rule. Underthe nonlinear kinematic hardening rule, the backstress travels in a direction cor-rected by the nonlinear recovery term (Fig. 3). The idea of superposition of a seriesof nonlinear kinematic hardening rules proposed later by Chaboche et al. (1979,
Fig. 1. Illustration of stress space nonlinear kinematic hardening rule.
758 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777
1987) and this concept makes this model very ¯exible and adept in simulatingmaterial behavior, especially ratchetting.The stress space nonlinear kinematic hardening rules were later generalized by
Jiang and Sehitoglu (1996a) as:
d� q� �ij � f
q� �1 nij ÿ f
q� �2 L
q� �ij
� �dp q � 1; 2; . . . ;M� �; �2:5�
with
condition 1 fq� �1 is single valued and non-negative; and �2:6a�
condition 2 fq� �2 � nijL
q� �ij when � q� �
ij
� r q� � r q� � > 0ÿ � �2:6b�
where nij is the exterior unit normal of the yield surface, Lq� �ij is the unit normal of the
qth limiting surface, and dp is the equivalent plastic strain.The ®rst condition ensures that the plastic modulus will not be equal to zero or to
a negative value, while the second condition limits the qth backstress within a lim-iting surface or radius r q� �, de®ned in stress space.A more general nonlinear kinematic hardening rule, which accommodates hard-
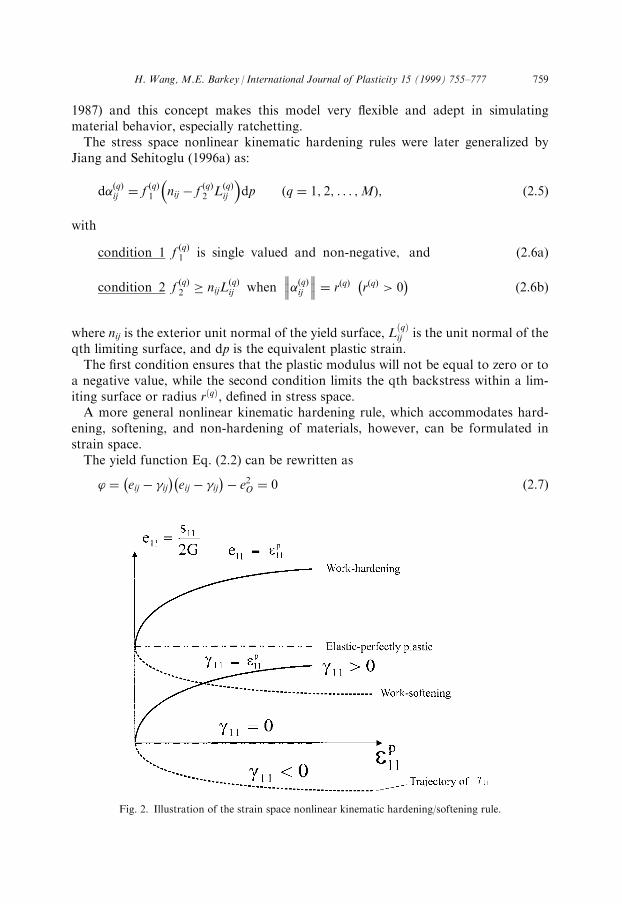
ening, softening, and non-hardening of materials, however, can be formulated instrain space.The yield function Eq. (2.2) can be rewritten as
' � eij ÿ ijÿ �
eij ÿ ijÿ �ÿ e2O � 0 �2:7�
Fig. 2. Illustration of the strain space nonlinear kinematic hardening/softening rule.
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 759
where eij � "0ij ÿ "pij is the deviatoric elastic strain tensor. Because eij � sij2G, for work-
hardening materials, the eÿ "p curve can be determined from the sÿ "p curve withvertical coordinates scaled down by 2G. Hence the two curves have the exact same
shape (Figs. 1 and 2). The hardening parameter ij thus equals�ij2G
. This has been
already demonstrated in Eq. (2.3) via an analytical approach. However, the furtherimplication is that the strain space non-linear kinematic hardening rule can be pro-posed based on pure strain quantities such as the eÿ "p relation (Fig. 2) observed instrain space.
Thus, the strain space kinematic hardening rule can be proposed based on thenonlinear eÿ "p relation as follows:
d q� �ij � ' q� �
1 �ij � ' q� �2 ÿ
q� �ij
� �dp q � 1; 2; . . . ;M� �; �2:8�
d ij �XMq�1
d q� �ij ; �2:9�
where �ij is the exterior normal of the strain space yield surface,
�ij �
@'
@"0ij@'
@"0mn
�2:10�
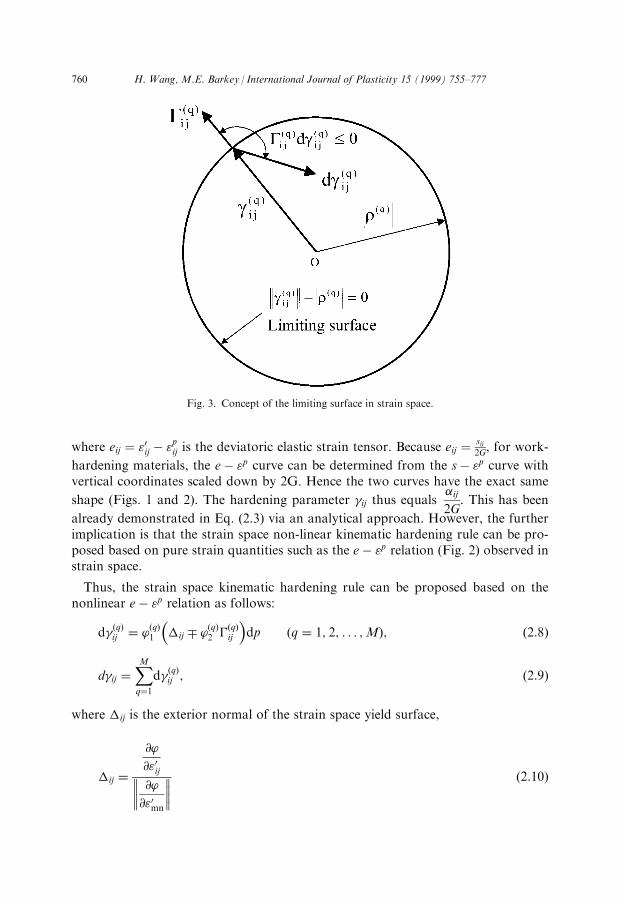
Fig. 3. Concept of the limiting surface in strain space.
760 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

If the yield function (2.2) is employed,
�ij �"0ij ÿ �ij� �"0mn ÿ �mn
ÿ � �2:11�
The term ÿq� �ij �
q� �ij
q� �
mnk k, is the unit vector of q� �ij . Usually the number of terms, M,
employed in Eq. (2.9) is 5±10 according to previous investigations (Jiang andKurath, 1996).
Eq. (2.8) is not restricted to work-hardening materials. The negative sign in theequation is for work-hardening materials while the positive sign is for work-softeningmaterials. This is because �ij and ÿ
q� �ij are in ``opposite'' directions ÿ
q� �ij �ij < 0
� �for
work-softening materials. The elastic-perfectly plastic case can also be accom-modated with '
q� �1 � 0.
3. The functions 'q� �1 and '
q� �2
Similar to the function fq� �1 in Eq. (2.5), the function '
q� �1 in Eq. (2.8) can be either
material constants or functions of plastic strain range describing transient behaviorof materials such as cyclic hardening or cyclic softening (Jiang and Sehitoglu,1996a).For convenience, it is assumed that
' q� �1 � � q� �� q� � q � 1; 2 . . . ;M� � �3:1�
at this stage, where � q� � and � q� � are constants. The determination of these constantswill be discussed in Section 5 along with their meanings.The two conditions for stress space nonlinear kinematic hardening rules, Eqs.
(2.6a) and (2.6b), are to ensure that, as pointed out before, the plastic modulus willnot be equal to zero or a negative value and the qth backstress will be limited withina limiting surface de®ned in stress space. The ®rst condition, however, can be elimi-nated for the strain space model. As will be seen in the next section, '
q� �1 can be a
positive function (constant) for work-hardening materials, a negative function(constant) for work-softening materials and zero for elastic perfectly plastic materi-als. The second condition should be retained. However, the limiting surface will bede®ned in strain space. This condition will help explain the model performance anddetermination of the model constants.The conditions for the strain space nonlinear kinematic hardening rule areConditions
' q� �2 � �ijÿ
q� �ij when q� �
ij
� � q� � for work-hardening; or �3:2a�
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 761
' q� �2 � ÿ�ijÿij q� � when q� �
ij
� � q� ��� �� for work-softening �3:2b�
The absolute value of � q� ��� �� is necessary because � q� � will be negative in the case ofwork-softening materials (Section 5).The term '
q� �2 governs the nonlinear correction of d
q� �ij . Several forms of its stress
space counterpart, fq� �2 , have been proposed (Chaboche, 1991; Ohno and Wang,
1993a,b; Jiang and Sehitoglu, 1996a,b). The basic requirement is that 'q� �2 has to
satisfy the proposed condition [Eqs. (3.2a) or (3.2b)]. Generally, 'q� �2 can be pro-
posed to have the functional form
' q� �2 � ' q� �
2
q� �ij
� q� ��� ��
0@ 1A q� �0B@1CA �3:3�
The power law form of this function is to better model the material behavior underunbalanced long-term history such as ratchetting and mean stress relaxation(McDowell, 1994). The speci®c form has to be proposed based on the experimentalobservations. For convenience of discussion, the following form of '
q� �2 is employed,
although other forms can equally be used in the following discussion:
' q� �2 �
q� �mn
� q� �
! q� ��1�3:4�
Therefore
d q� �ij � � q� �� q� � �ij ÿ
q� �mn
� q� �
� � q� ��1ÿ
q� �ij
!dp for work-hardening; and
�3:5a�
d q� �ij � ÿ� q� � � q� ��� �� �ij �
q� �mn
� q� ��� ��
! q� ��1ÿ
q� �ij
0@ 1A dp for work-softening: �3:5b�
By examining the scalar product of d q� �ij with ÿ
q� �ij ,
d q� �ij ÿ
q� �ij � � q� �� q� � �ijÿ
q� �ij ÿ
q� �mn
� q� �
� � q� ��1 !dp for work-hardening; �3:6a�
and
d q� �ij ÿ
q� �ij � ÿ� q� � � q� ��� �� �ijÿ
q� �ij �
q� �mn
� q� ��� ��
! q� ��10@ 1A dp for work-softening:
�3:6b�
762 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

It can be demonstrated from Eqs. (3.6a) and (3.6b) that
d q� �ij ÿ
q� �ij � 0 �3:7�
when q� �
mn
� � q� ��� ��.So '
�q�2 � �k
�q�mnk��q� ��q� � 1 satis®es the conditions of Eqs. (3.2a) and (3.2b).
Eq. (3.7) demonstrates that when the q� �ij trajectory is to the surface
q� �
mn
ÿ � q� ��� �� � 0, its increment d q� �ij and the normal of the surface, ÿ
q� �ij , will
always make an obtuse angel between them. Because q� �ij starts from zero and ÿ
q� �ij is
the exterior normal of q� �
mn
ÿ � q� ��� � 0, it is clear the trajectory of q� �ij is limited
within the surface q� �
mn
ÿ � q� ��� �� � 0, Fig. 3).
The general behavior of this 'q� �2 �
q� �
mnk k� q� �
� � q� ��1
is that the nonlinear recovery term will be activated more and more ( q� �ij becomes
more and more nonlinear) as the general hardening/softening parameter q� �ij
approaches the limiting surface. Once q� �
mn
� � q� ��� �� ( q� �ij is exactly on the limiting
surface), the condition of Eq. (3.7) will be satis®ed so that the q� �ij will never traverse
the limiting surface. The limiting surface is important because it makes the modeland plastic compliance modulus converge. The limiting surface idea was generalizedby Jiang and Sehitoglu (1996a) for the stress space models. It is further generalizedhere for the strain space nonlinear kinematic rule.
4. Strain space plastic compliance function
The strain space normality ¯ow rule is
d"pijd"pij �
1
D
@'
@"0mn
d"0mn
� �@'
@"0ij; �4:1�
and the scalar product with itself is
d"pijd"
pij �
1
D2
@'
@"0mn
d"0mn
� �2 @'
@"0st
@'
@"0st�4:2�
Note @'@"0mn
d"0mn > 0 during the plastic loading process and @'@"0
ij� 2 "0ij ÿ �ij� �
if Eq.(2.2) is used, then the plastic compliance function
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 763

D � 2 "0mn ÿ �mn
ÿ �d"0mn
dp
���������������@'
@"0st
@'
@"0st
s�4:3�
From the yielding condition ' � 0 and consistency condition d' � 0,���������������@'
@"0st
@'
@"0st
s� 2eO and; �4:4�
2 "0ij ÿ �ij� �
d"0ij � 2 "0mn ÿ �mn
ÿ �d�mn � 2eOdeO: �4:5�
Therefore,
D � 2eO2 "0mn ÿ �mn
ÿ �d�mn � 2eOdeO
dp�4:6�
Substituting the di�erential form of Eq. (2.3) into Eq. (4.6),
D � 2eO2 "0mn ÿ �mn
ÿ �d�pmn � 2 "0ij ÿ �ij
� �d ij � 2eOdeO
dp�4:7�
Replacing the d ij by Eq. (2.9) and then Eq. (2.8),
D � 4e2O 1�XMq�1' q� �1 1� ' q� �
2 �q� �ij ÿ
q� �ij
� � !� 4e2O
deOdp
: �4:8�
If isotropic hardening is not considered (i.e.deOdp� 0) and de®ning
Dperf � 4e2O; and �4:9�
D � 4e2O
XMq�1' q� �1 1� ' q� �
2 �q� �ij ÿ
q� �ij
� �; then
�4:10�
D � Dperf �D : �4:11�
Substituting Eq. (3.1) and (3.4) into Eq. (4.10),
D � 4e2O
XMq�1� q� �� q� � 1ÿ q� �
mn
� q� �
� � q� ��1�
q� �ij ÿ
q� �ij
! !for work-hardening;
�4:12a�
764 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

and
D � 4e2O
XMq�1� q� � � q� ��� �� 1� q� �
mn
� q� ��� ��
! q� ��1�
q� �ij ÿ
q� �ij
0@ 1A0@ 1A for work-softening:
�4:12b�
Eqs. (4.12a) and (4.12b) show that the strain space plastic compliance functionconsists of two parts: Dperf due to non-hardening behavior and D due to the gen-eralized hardening/softening parameter ij. In stress space based models, the plasticmodulus function is determined solely by the hardening parameter and hence islimited to work-hardening materials only.To further investigate the strain space plastic compliance function, D, the uniaxial
tension case is employed for the normality ¯ow rule [Eq. (4.1)].In uniaxial tension,
"022 � "033 � ÿ1
2"011; �4:13a�
"p22 � "p33 � ÿ1
2"p11; and �4:13b�
�22 � �33 � ÿ 1
2�11: �4:13c�
Hence, by substituting these relations back into Eq. (4.1)
D� 4e2Od"011d"p11� 4e2O
de11 � d"p11d"p11
� 4e2O 1� de11
d"p11
� �: �4:14�
Comparing Eq. (4.11) with Eq. (4.14), the following can be obtained:
D � 4e2O
XMq�1' q� �1 1� ' q� �
2 �q� �ij ÿ
q� �ij
� � !� 4e2O
de11
d"p11: �4:15�
Eq. (4.15) clearly shows the plastic compliance modulus D is directly proportionalto the slope of e11 ÿ "p11. But unlike the stress space plastic modulus, the term D canbe positive, negative, and zero if the material is work hardening, work softening, orelastic perfectly-plastic (Fig. 2). The total compliance function D, however, is stillpositive because of Dperf . This is demonstrated in Fig. 4.
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 765
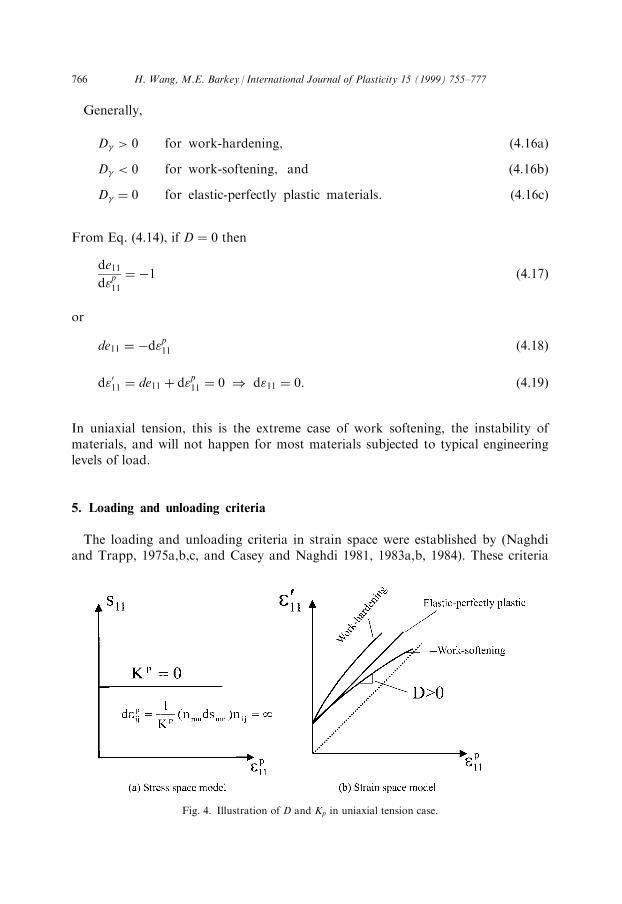
Generally,
D > 0 for work-hardening; �4:16a�D < 0 for work-softening; and �4:16b�D � 0 for elastic-perfectly plastic materials: �4:16c�
From Eq. (4.14), if D � 0 then
de11
d"p11� ÿ1 �4:17�
or
de11 � ÿd"p11 �4:18�
d"011 � de11 � d"p11 � 0 ) d"11 � 0: �4:19�
In uniaxial tension, this is the extreme case of work softening, the instability ofmaterials, and will not happen for most materials subjected to typical engineeringlevels of load.
5. Loading and unloading criteria
The loading and unloading criteria in strain space were established by (Naghdiand Trapp, 1975a,b,c, and Casey and Naghdi 1981, 1983a,b, 1984). These criteria
Fig. 4. Illustration of D and Kp in uniaxial tension case.
766 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

hold for work-softening materials as well as for work hardening and elastic-perfectly
plastic materials. (It can be shown @'@"0
ij� @'
@"ijand @'
@"0ijd"0ij � @'
@"ijd"ij, so the criteria are
expressed in terms of deviatoric strain.) The loading and unloading criteria are:
' < 0 elastic deformation
' � 0;@'
@"0ijd"0ij < 0 elastic unloading
' � 0;@'
@"0ijd"0ij � 0 neutral loading
' � 0;@'
@"0ijd"0ij > 0 plastic loading
�5:1�
It was demonstrated by Naghdi and Trapp (1975a) and latter by Casey and Naghdi(1983a) that the loading criteria in strain space and stress space are the same forelastic deformation, elastic unloading, and neutral loading. But the loading condi-tion @f
@sijdsij > 0 in stress space does not necessarily imply @'
@"0ijd"0ij > 0 in strain space
or vice versa. Their relations are listed in Eq. (5.2). In this sense the two formula-tions cannot be considered equivalent (Casey and Naghdi, 1983a).
@'
@"0ijd"0ij > 0 )
@f
@sijdsij > 0 work-hardening material
@f
@sijdsij < 0 work-softening material
@f
@sijdsij � 0 elastic-perfectly plastic material
8>>>>>><>>>>>>:�5:2�
It can be seen quite clearly at this point that the strain space yield function [Eq.(2.2)], the plastic compliance modulus function [Eq. (4.8)] and the loading andunloading criteria [Eq. (5.2)] make the strain space based formulation generalenough to accommodate work-hardening, work-softening, and elastic-perfectlyplastic materials.
6. Determination of material constants in the model
In the following, the work-hardening material and work-softening material will bediscussed concurrently. For work-hardening materials, the constants � q� � and � q� �,q � 1; 2 . . . ;M� � can be determined by following a procedure similar to that dis-cussed by Jiang and Sehitoglu (1996b) for Armstrong-Frederick family of models.Because the slope of the curve eÿ "p is positive for work-hardening materials, theconstants � q� �, q � 1; 2 . . . ;M� �, are all positive numbers. For work-softening mate-rials, similar ideas can be employed. However, � q� � q � 1; 2 . . . ;M� � are negative
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 767

numbers due to the negative slope of the curve. Detailed discussions are givenbelow.Determination of material constants can be based on a uniaxial tension±com-
pression curve. In the following discussion, the curve from the zero stress-strainpoint to the most tensile point is used.For work-hardening materials and a uniaxial state of stress,
q� �ij
� ���3
2
r q� �11
��� ��� � ���3
2
r q� �11 ; �6:1a�
ÿq� �11 �
q� �11
q� �mn
����2
3
r; �6:2a�
�11 ����2
3
r; �6:3a�
dp ����3
2
rd"p11: �6:4a�
For work-softening materials,
q� �mn
� ���3
2
r q� �11
� ÿ ���3
2
r q� �11 ; �6:1b�
ÿq� �11 �
q� �11
q� �mn
� ÿ���2
3
r; �6:2b�
�11 ����2
3
r; and �6:3b�
dp ����3
2
rd"p11 �6:4b�
By substituting the above equations into Eq. (3.5a) and (3.5b),
d
���3
2
r q� �11
� q� �
0BB@1CCA � 1ÿ
���3
2
r q� �11
� q� �
0BB@1CCA
q� ��10BBB@1CCCAd
���3
2
r� q� �"p11
!; �6:5a�
768 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777
for work-hardening materials and
d
���3
2
r q� �11
� q� ��� ��0BB@
1CCA � ÿ 1�
���3
2
r q� �11
� q� ��� ��0BB@
1CCA q� ��10BBB@
1CCCAd
���3
2
r� q� �"p11
!�6:5b�
for work-softening materials.
Denoting x ���32
q� q� �"p11, y �
��32
q
q� �11
� q� �j j , m � q� �, and noticing for work-hardening
materials � q� ��� �� � � q� �, Eq. (6.5a) simpli®es to
dy
dx� 1ÿ ym�1; with initial condition x � 0; y � 0: �6:6a�
Eq. (6.5b) simpli®es to
dy
dx� ÿ1ÿ y
�� ��my; with initial condition x � 0; y � 0: �6:6b�
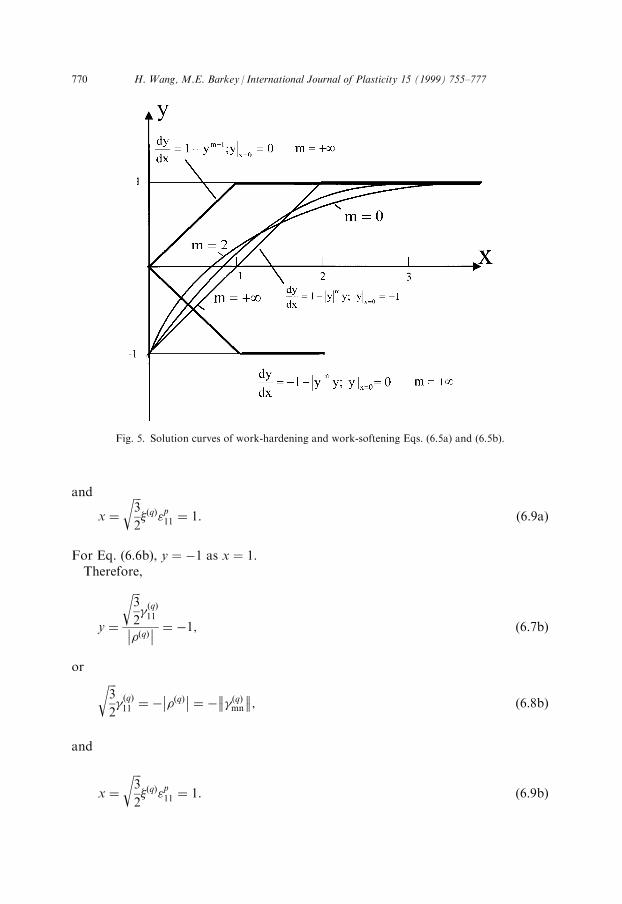
The similar equation has been obtained by Jiang and Sehitoglu (1996b) to determinethe constants of the Armstrong-Frederick family of models. However, in their work,the curve from most compressive point to most tensile point was employed; there-fore the initial conditions are di�erent. Nevertheless Eq. (6.6a) and (6.6b) must havethe similar solution curves as given by Jiang and Sehitoglu (1996b). However,because the initial condition is di�erent, the solution curve of Eq. (6.5a) will beshifted 1 to the left of Jiang's curve while solution curve of Eq. (6.5b) has a negativeslope (Fig. 5). As was also demonstrated by Jiang and Sehitoglu (1996b), the value mwill have a minimal e�ect on the solution curve and thus a minimal e�ect on thedetermination of constants. Therefore m is assumed to be a very large number in thedetermination of material constants. The constant m can later be determined withtrial and error method based on uniaxial ratchetting or mean stress relaxation test.From the solution curve, y � 1, at x � 1 for Eq. (6.6a). Therefore,
y �
���3
2
r q� �11
� q� ��� �� � 1; �6:7a�
or
���3
2
r q� �11 � � q� ��� �� � q� �
mn
� � q� �; �6:8a�
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 769
and
x ����3
2
r� q� �"p11 � 1: �6:9a�
For Eq. (6.6b), y � ÿ1 as x � 1.Therefore,
y �
���3
2
r q� �11
� q� ��� �� � ÿ1; �6:7b�
or ���3
2
r q� �11 � ÿ � q� ��� �� � ÿ q� �
mn
; �6:8b�
and
x ����3
2
r� q� �"p11 � 1: �6:9b�
Fig. 5. Solution curves of work-hardening and work-softening Eqs. (6.5a) and (6.5b).
770 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

So for both work-hardening and work-softening materials,��32
q� q� �"p11 � 1 or � q� � ���
23
q1"p11
corresponds to the saturation of q� �ij (on the limiting surface).
If we notice that m is a large number, then
q� �mn
� q� �
! q� ��1� 0 if q� �
mn
< � q� ��� �� unsaturated� �; and �6:10�
q� �mn
� q� ���
! q� ��1� 1 if q� �
mn
� � q� ��� �� saturated� �: �6:11�
If u � 1 to (qÿ 1) u� �ij are assumed to be saturated, from Eqs. (4.12a) and (4.12b)
D � 4e2O
XMu�q� u� �� u� �
!for work-hardening; and �6:12a�
D � 4e2O
XMj�i� j� � � j� ��� �� !
for work-softening �6:12b�
in uniaxial tension.Similar equations were reached for the Armstrong-Frederick family of models
(Jiang and Sehitoglu, 1996b). Hence the procedures for the determination of r q� �
from pre-selected c q� � or c q� � pre-selected r q� � described in their paper can be followedexactly to determine � q� � from pre-selected � q� � or � q� � from pre-selected � q� � with theeÿ "p curve.
7. General performance of model for various materials
A complete list of the strain space nonlinear kinematic hardening model is sum-marized below.
7.1. The yield surface
j � e0ij ÿ bij� �
: e0ij ÿ bij� �
ÿ e2O � 0 �7:1�
where
�ij � "pij � ij: �7:2�
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 771

7.2. Nonlinear kinematic hardening rule
d ij �XMq�1
d q� �ij �7:3�
d q� �ij � � q� �� q� � �ij ÿ
q� �mn
� q� ��� ��
! q� ��1ÿ
q� �ij
0@ 1A dp for work-hardening and
�7:4a�
d q� �ij � ÿ� q� � � q� ��� �� �ij �
q� �mn
� q� �
! q� ��1ÿ
q� �ij
0@ 1A dp for work-hardening and
�7:4b�q � 1; 2; . . . ;M� �
7.3. Normality ¯ow rule
d"pij �1
D
@'
@"0mn
d"0mn
� �@'
@"0ij�7:5�
with
D � Dperf �D ; and �7:6�
where
Dperf � 4e2O: �7:7�
D � 4e2O
XSq�1� q� �� q� � 1ÿ q� �
mn
� q� �
� � q� ��1�
q� �ij ÿ
q� �ij
! !for work-hardening
�7:8a�
or
D � ÿ4e2OXS
q�S�1� q� � � q� ��� �� 1� q� �
mn
� q� �
� � q� ��1�
q� �ij ÿ
q� �ij
! !for work-softening
�7:8b�
772 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777
7.4. Loading-unloading condition
j < 0 elastic deformation;
' � 0;@'
@"0ijd"0ij < 0 elastic unloading;
' � 0;@'
@"0ijd"0ij � 0 neutral loading
' � 0;@'
@"0ijd"0ij > 0 plastic loading:
It can be seen in Section 2 that, for work-hardening materials, the strain spacenonlinear kinematic hardening model is completely equivalent to the strain spaceformulation of the Armstrong-Frederick family of models, whose validity andapplications for work-hardening materials have already been demonstrated Wangand Barkey (1998). Thus the following discussion will concentrate on the elastic-perfectly plastic and work-softening materials.
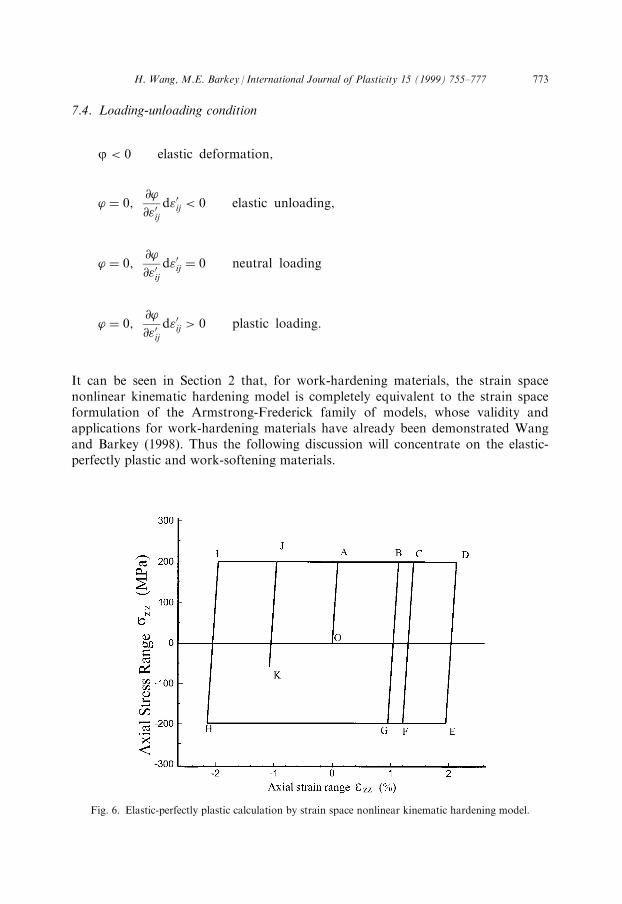
Fig. 6. Elastic-perfectly plastic calculation by strain space nonlinear kinematic hardening model.
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 773
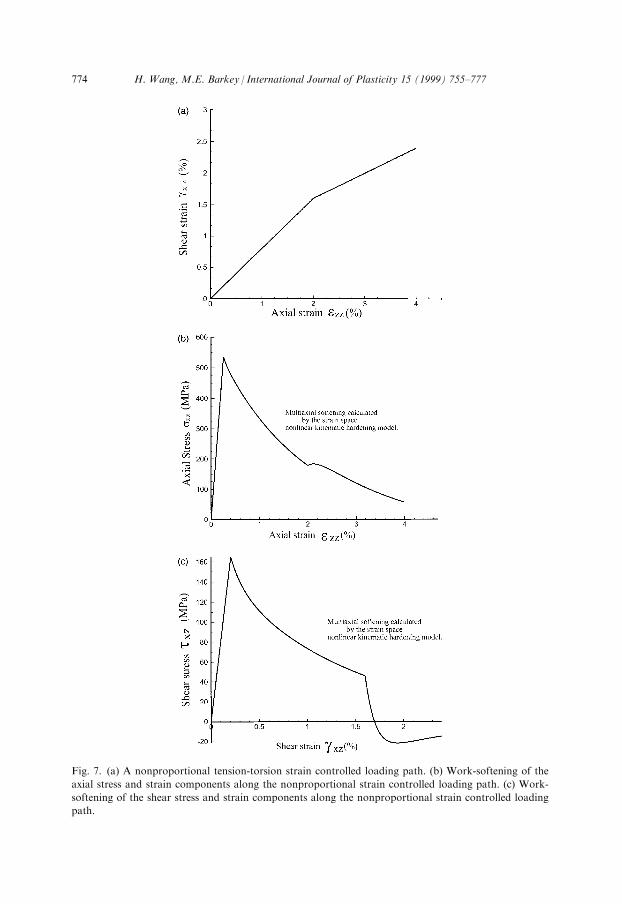
Fig. 7. (a) A nonproportional tension-torsion strain controlled loading path. (b) Work-softening of the
axial stress and strain components along the nonproportional strain controlled loading path. (c) Work-
softening of the shear stress and strain components along the nonproportional strain controlled loading
path.
774 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

For elastic-perfectly plastic materials, � q� � � 0 q � 1; 2; . . .M� � due to the fact theslope of eÿ "p is equal to zero. Therefore,
D � Dperf �7:9�
Figure 6 is the calculation of a uniaxial tension-compression cyclic loading responsefor a strain controlled elastic-perfectly plastic material. The loops BCFG and JK aresub-loops due to local elastic unloading. The loop JK only involves the elasticunloading while BCFG causes the plastic deformation in the opposite directions.Both loops return to the major loop when the material is loaded back from theelastic unloading. This behavior is well observed for work-hardening materials.Some materials such as concrete and many rocks will exhibit work-softening fol-
lowing the attainment of the ultimate strength (Lubliner, 1990). Work-softeningmaterials can only be treated by the strain space plasticity models. Figure 7demonstrates another calculation from the proposed strain space nonlinear kine-matic hardening model. The general plastic compliance Eq. (7.6) was used. Theconstants for the calculation are listed in Table 1.Figure 7 are the results of multiaxial work-softening calculation. A nonpropor-
tional tensile-shear strain controlled loading is used in Fig. 7. In Figs. 7(b) and (c),noting that the axes are scaled di�erently, a slight rise in the tensile component and alarge drop in shear component followed with slight hardening in later deformation.It has to be emphasized that these results are from calculations and very few
experiments have been conducted for work-softening materials, particularly formultiaxial nonproportional loading situations. Therefore, work needs to be done tounderstand the work-softening material behavior and further improve the theory,particularly with regard to experimental characterization.
8. Conclusions
The proposed strain space nonlinear kinematic hardening and softening modelestablishes the theory in strain space. For work-hardening materials, this model istotally equivalent to its stress space counterpart, the Armstrong-Frederick family ofmodels. Thus, it preserves all the achievements made by various researchers on theArmstrong-Frederick family of models, which has gained increasingly more atten-tion and applications. On the other hand, the model possesses the potential to
Table 1
Constants of the strain space nonlinear kinematic hardening and softening model for Fig. 7
�(q) �(1)=594.7, �(2)=55.8, �(3)=50.9, �(4)=40.9, �(5)=40.5, �(6)=38.9, �(7)=37.5,
�(8)=34.6, �(9)=30.3, �(10)=20.4
�(q) �(1)=�(2)=�(3)=�(4)=�(5)=�(6)=�(7)=�(8)=�(9)=ÿ0.000126�(10)=ÿ0.00218
(q) (1)=(2)=(3)=(4)=(5)=(6)=(7)=(8)=(9)=(10)=1
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 775
simulate more complex material and structural behavior such as work-softening andthe elastic-perfectly plastic case and combinations of them and provides a possiblelink between the phenomenological model and microstructural changes within amaterial. However, because most of the prior work has been done on work-hard-ening materials, more data and experience need to be accumulated for work-soft-ening materials and structures.
References
Casey, J., Naghdi, P.M., 1981. On the characterization of strain-hardening in plasticity. ASME Journal of
Applied Mechanics 48, 285.
Casey, J., Naghdi, P.M., 1983a. On the nonequivalence of the stress space and strain space formulation of
plasticity theory. ASME Journal of Applied Mechanics, 50, 350±354.
Casey, J., Naghdi, P.M., 1983b. A remark on the de®nition of hardening, softening and perfectly plastic
behavior. Acta Mechanica 48, 91.
Casey, J., Naghdi, P.M., 1984. Further constitutive result in ®nite plasticity. Quart. J. Mech. Appl. Math.
37, 231.
Chaboche, J.L., Dang Van, K., Cordier, G., 1979. Modelization of the strain memory e�ect on the cyclic
hardening of 316 stainless steel. Structural Mechanics in Reactor Technology, Transactions of the Fifth
International Conference on Structural Mechanics in Reactor Technology, Div. L, Berlin, L11/3.
Chaboche, J.L., 1987. Cyclic plasticity modeling and ratchetting e�ects. In: Desai et al. (Eds.), 2nd
International Conference on Constitutive Laws for Engineering Materials: Theory and Application,
Tucson, Arizona. Elsevier, Amsterdam, p. 47.
Chaboche, J.L., 1991. On some modi®cations of kinematic hardening to improve the description of
ratchetting e�ects. International Journal of Plasticity 7, 661±678.
Chaboche, J.L., 1994. Modeling of ratchetting: evaluation of various approaches. European Journal of
Mechanics, A/Solids, 13(4).
Il'yushin, A.A., 1960. On the increments of plastic deformations and the yield surface. PMM 24, 663.
Il'yushin, A.A., 1961. On the postulate of plasticity. PMM 25, 503.
Jiang, Y., Sehitoglu, H., 1996a. Modeling of cyclic ratchetting plasticity, part I: development of con-
stitutive relations. ASME Journal of Applied Mechanics 63, 720±725.
Jiang, Y., Sehitoglu, H. 1996b. Modeling of cyclic ratchetting plasticity, part II: comparison of model
simulations with experiments. ASME Journal of Applied Mechanics 63, 726±733.
Jiang, Y., Kurath, P., 1996. Characteristics of the armstrong-frederick type plasticity models. Interna-
tional Journal of Plasticity 12 (3), 387±415.
Lubliner, J., 1990. Plasticity Theory. MacMillan Publishing Company, a division of MacMillan, Inc.
McDowell, D.L., 1994. Description of nonproportional cyclic ratchetting behavior. European Journal of
Mechanics, A/Solids 13(5).
Mroz, Z., 1967. On the description of anisotropic work hardening. Journal of Mechanics and Physics of
Solids 15 (3), 163±175.
Naghdi, P.M., Trapp, J.A., 1975a. The signi®cance of formulating plasticity theory with reference to
loading surfaces in strain space. International Journal of Engineering Science 13(9), 785±797.
Naghdi, P.M., Trapp, J.A., 1975b. Restrictions on constitutive equations of ®nitely deformed elastic-
plastic materials. Quart. J. Mech. Appl. Math. 28, 25±46.
Naghdi, P.M., Trapp, J.A., 1975c. On the nature of normality of plastic strain rate and convexity of yield
surfaces in plasticity. ASME Journal of Applied Mechanics 42, 61±66.
Ohno, N., Wang, J.D., 1993a. Kinematic hardening rules with critical state of dynamic recovery: Part I:
formulation and basic features for ratchetting behavior. International Journal of Plasticity 9, 375±390.
Ohno, N., Wang, J.D., 1993b. Kinematic hardening rules with critical state of dynamic recovery: part II:
application to experiments of ratchetting behavior. International Journal of Plasticity 9, 391±403.
776 H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777

Prager, W., 1955. The theory of plasticity: a survey of recent achievements. Proceedings The Institution of
Mechanical Engineers, Vol. 169, pp. 41.
Tseng, N.C., Lee, G.C., 1983. Simple plasticity model of the two-surface type. ASCE Journal of Engi-
neering Mechanics 109, 795±810.
Wang, H., Barkey, M.E., 1998. Strain space formulation of the Armstrong±Frederick family of plasticity
models. ASME Journal of Engineering Materials and Technology 120 (3), 230±235.
Yoder, R.J., 1981. A strain-space plasticity theory and numerical implementation. Ph.D. dissertation,
California Institute of Technology.
Yoder, R.J., Iwan, W.D., 1981. On the formulation of strain -space plasticity with multiple loading sur-
face. ASME Journal of Applied Mechanics 48, 773±778.
Ziegler, H., 1959. A modi®cation of Prager's hardening rule. Quart. Appl. Math. 17, 55.
H. Wang, M.E. Barkey / International Journal of Plasticity 15 (1999) 755±777 777