analysis and simulation of slotted aloha-based rfid anti...
TRANSCRIPT

Abstract— Automatic Identification technology is a kind of
methods about automatically identifying objects without human
involvement. RFID reader can collect data from tags that attached to
objects and store the data to the computer as inputs. With the help of
computer system, highly automated information or data acquisition
process can be achieved. Automatic Identification technology is
developed rapidly and globally in recent decades. Using various
media as the information carrier forms different automatic
identification technology types, such as barcodes technology,
biometrics technology, magnetic stripes technology, Radio
Frequency Identification (RFID), Optical Character Recognition
(OCR), and voice recognition, etc. Radio Frequency Identification
(RFID) is a technology that uses radio waves for Automatic
Identification that was developed in 1980’s. RFID system consists
of two parts: RFID Tags that attached to the objects and RFID
Readers that can read information from tags. A RFID tag includes an
integrated circuit that contains information about the object and an
antenna to receive signals from RFID Readers and transmit
information to RFID Readers. This paper is to evaluate and analyze
the performance of slotted Aloha based anti-collision protocols and
simulation of Slotted Aloha Anti-Collision Protocol under normal
and interfering environments. The Simulation of the Slotted Aloha
protocol will be designed under the environment of Matlab.
Index Terms—Types of Aloha Protocol, Aloha, pure Aloha,
slotted Aloha.
I. INTRODUCTION
Frequency Identification (RFID) networks use radio
signal broadcast to automatically identify items with attached
RFID tags. A tag consists of a microchip that stores a unique
identifier and an antenna. The tag’s antenna is attached to the
chip and can transmit a unique tag identifier to a reader (also
called interrogator). The reader is capable of learning the set
of tags within its interrogation range.[1]
RFID tags can be classified into two types: Active RFID
tags and Passive RFID tags. Active tags contain batteries,
while passive tags need external power to provoke signal
transmission instead. The maximum working range of
passive tags is 3 meters. Active tags include battery assisted
passive tags, or called semi passive tags, with the working
range from 100 meters to 1000 meters respectively.
Salah Mohmad Aboghsesa, Tarek Mosbah Abdala, Nasarudin Daud , are with Department of Networking, Faculty of Creative Media and
Innovative Technology, Infrastructure University Kuala Lumpur (IUKL)
Kajang, Selangor, Malaysia, Email id:[email protected], [email protected], [email protected]
In RFID system, when more than one tag send signal to one
Reader simultaneously, the signals will be interfered with
each other, as Figure shows. Reader can receive signal from
Tag1 correctly during period t1. At period t3, Tag2 and Tag3
send signals to Reader while collision occurs at period t2.
Under this situation, the Reader cannot recognize the correct
signal either from Tag2 or Tag3, and this is called incomplete
collision. Period t4 shows the complete collision between
Tag2 and Tag3.
Collisions caused by conflicting communication signals will
influence the system efficiency and the data transmission
rate. Multi-tag system must employ an anti-collision
algorithm to avoid these collisions the most significant
algorithm used to solve the collision is Aloha algorithms.
II. ALOHA
ALOHA is a medium access protocol that was originally
designed for ground based radio broadcasting however it is
applicable to any system in which uncoordinated users are
competing for the use of a shared channel. Pure ALOHA and
slotted ALOHA are the two versions of ALOHA.
A. Pure ALOHA
Pure ALOHA uses a very simple idea that is to let users
transmit whenever they have data to send. Pure ALOHA is
featured with the feedback property that enables it to listen to
the channel and finds out whether the frame was destroyed.
Feedback is immediate in LANs but there is a delay of 270
msec in the satellite transmission [2]. It requires
acknowledgment if listening to the channel is not possible
due to some reason. It can provide a channel utilization of 18
percent that is not appealing but it gives the advantage of
transmitting any time.
B. Slotted ALOHA
Slotted ALOHA divides time into discrete intervals and
each interval corresponds to a frame of data. It requires users
to agree on slot boundaries. It does not allow a system to
transmit any time. Instead the system has to wait for the
Analysis and Simulation of Slotted Aloha-Based RFID
Anti-Collision Protocol
Salah Mohmad Aboghsesa, Tarek Mosbah Abdala, Nasarudin Daud
Figure 1: Pure ALOHA
2015 International Conference on Network security & Computer Science (ICNSCS-15) Feb. 8-9, 2015 Kuala Lumpur (Malaysia)
http://dx.doi.org/10.15242/IAE.IAE0215013 13

beginning if the next slot.
C. Slotted Aloha VS Pure Aloha
Slotted ALOHA is a refinement over the pure ALOHA.
The Slotted ALOHA requires that time be segmented into
slots of a fixed length exactly equal to the packet
transmission time. Every packet transmitted must fit into one
of these slots by beginning and ending in precise
synchronization with the slot segments. A packet arriving to
be transmitted at any given station must be delayed until the
beginning of the next slot. In contrast, for pure ALOHA, a
packet transmission can begin at any time.[4]
This diagram shows above the vulnerable period for
transmitted packets. In the case of slotted ALOHA, with
packets synchronized to slots, it is clear that the vulnerable
period is reduced to T seconds since only packets transmitted
in the same slot with the reference packet can interfere with
it.. The figure also shows the vulnerable period of pure
ALOHA, which is 2T.[4,5]
III. PROBLEM STATEMENT
There are some common problems with RFID which are
the reader collision and tag collision. Reader collision occurs
when the signals from two or more readers overlap. The tag is
unable to respond to simultaneous queries. Systems must be
carefully set up to avoid this problem.
Collisions bring extra delay, a waste of bandwidth, and
extra energy consumption to the interrogation process of
RFID.
IV. OBJECTIVES
The objectives of this project are:
To evaluate and analyze the performance of slotted
Aloha based anti-collision protocols.
Using simulation of Slotted Aloha Anti-Collision
Protocol under normal and interfering
environments. The Simulation of the Slotted Aloha
protocol will be designed under the environment of
MATLAB.
V. SYSTEM REQUIREMENT
In this paper we use MATLAB to evaluate and analyze the
performance of slotted Aloha based anti-collision protocols,
Microsoft Office 2010, Win 8 (64-bit version). 64-bit version
of MATLAB is the right choice for most situations, because it
can access the larger amounts of memory. However, we use
MATLAB software to make simulation on how to reduce the
collision.
VI. SIMULATION FLOW CHART
An overview of the simulator created using MATLAB to
calculate the time required to identify RFID tags with the
Frame Slotted Aloha protocol when interference is present.
Tags will pick a slot randomly and respond to the reader’s
query. More than one tag responding using the same slot will
result in a collision at the RFID reader end. Collided tags
need to be read again until the total number of tags is
identified. Each anti-collided tag interference is compared
with the user-entered probability of interference, and the tags
are taken as successfully read if the anti-collided tag
interference is greater than the user-entered probability of
interference. If not, those anti-collided tags need to be read
again. The simulator is run until the total number of RFID
tags is identified. Figure 4.1 below displays the flow chart of
the proposed simulator.
Figure 2: Slotted ALOHA
Figure 3: vulnerable period for transmitted packets.
Figure 4: Flow chart of simulation
2015 International Conference on Network security & Computer Science (ICNSCS-15) Feb. 8-9, 2015 Kuala Lumpur (Malaysia)
http://dx.doi.org/10.15242/IAE.IAE0215013 14
VII. TESTING AND RESULT
The submitting author is responsible for obtaining
agreement of all coauthors and any consent required from
sponsors before submitting a paper. It is the obligation of the
authors to cite relevant prior work.
Authors of rejected papers may revise and resubmit them
to the journal again.
A. Test 1
In this test the probability of interference = .10 and
Number of RFID tags = 100 tags as shown in the figure
below.
B. Test 2
In this test the probability of interference = .50 and
Number of RFID tags = 100 tags as shown in the figure
below.
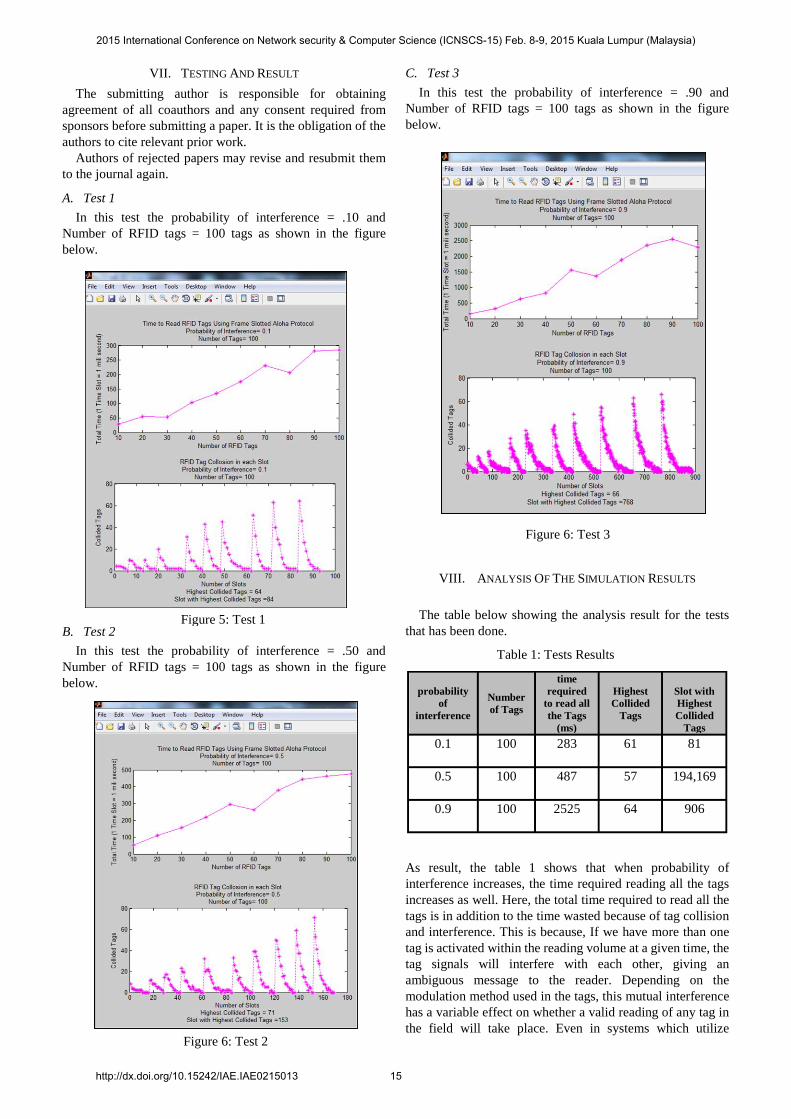
C. Test 3
In this test the probability of interference = .90 and
Number of RFID tags = 100 tags as shown in the figure
below.
VIII. ANALYSIS OF THE SIMULATION RESULTS
The table below showing the analysis result for the tests
that has been done.
As result, the table 1 shows that when probability of
interference increases, the time required reading all the tags
increases as well. Here, the total time required to read all the
tags is in addition to the time wasted because of tag collision
and interference. This is because, If we have more than one
tag is activated within the reading volume at a given time, the
tag signals will interfere with each other, giving an
ambiguous message to the reader. Depending on the
modulation method used in the tags, this mutual interference
has a variable effect on whether a valid reading of any tag in
the field will take place. Even in systems which utilize
Figure 6: Test 2
Figure 5: Test 1
Figure 6: Test 3
probability
of
interference
Number
of Tags
time
required
to read all
the Tags
(ms)
Highest
Collided
Tags
Slot with
Highest
Collided
Tags
0.1 100 283 61 81
0.5 100 487 57 194,169
0.9 100 2525 64 906
Table 1: Tests Results
2015 International Conference on Network security & Computer Science (ICNSCS-15) Feb. 8-9, 2015 Kuala Lumpur (Malaysia)
http://dx.doi.org/10.15242/IAE.IAE0215013 15

"anti-collision" methods, multiple tags in the field will
increase the amount of time necessary for completed data
transactions of all the tags.
IX. CONCLUSION
The main issue in RFID system is a tag collision. There
may be more than one tag in reader working range. When
reader queried tags simultaneously it will create a tag
collision paradigm. That causes the loss of information in a
sophisticated identification system.
This thesis analyzes the performance of the Slotted Aloha
protocol when the interference for tag detection is not
present. Furthermore, it analyzes the performance of the
Slotted Aloha protocol when there is interference for tag
detection. Both simulations are capable of calculating the
time required to identify tags.
X. FUTURE ENHANCEMENT
In this simulation, it was assumed that there was a constant
value for interference that enters by the user throughout the
tag identification process. In the future, a model could be
created to analyze the performance of the Slotted Aloha
protocol when the interference changes dynamically during
the tag identification process for more accurate results.
REFERENCES
[1] de Paula, T. C. M., Lagana, K., & Gonzalez-Ramirez, L. (1996).
Mexican Americans. In J. G. Lipson, S. L Dibble, & P. A. Minarik (Eds.), A packet guide (pp. 203-221). San Francisco: USCF Nursing
Press.
[2] Kavanagh, K., Absalom, K., Beil, W., & Schliessmann, L. (1999). Connectin to the network using RFID: A Lakota example. Advances in
Nursing Science,21, 9-31. Retrieved March 26, 2001 from
ProQuest/Nursing Journals database. http://dx.doi.org/10.1097/00012272-199903000-00005
[3] Ulrich, T. (1997, September 22). Linking to the system. Time, 150,
30-33. Retrieved March 1, 2001 from InfoTrac/Expanded Academic ASAP database.
[4] Padilla, H. (2000, June 6).technique for human interface (Minneapolis,
MN), p. 1B. Retrieved February 28, 2001 from Lexis-Nexis Universe/General News database.
[5] Fredrickson, M. (2000).The magic of the RFIDs. Miami, FL: Annual
Meeting of the Speech Communication Association.
[6] Crow, G. K. (1988). Anus. (Doctoral dissertation, University of Utah,
1988). Abstract retrieved March 19, 2001 from CINAHL database.
2015 International Conference on Network security & Computer Science (ICNSCS-15) Feb. 8-9, 2015 Kuala Lumpur (Malaysia)
http://dx.doi.org/10.15242/IAE.IAE0215013 16