anÁlisis comparativo de las plataformas tmote y …
TRANSCRIPT

UNIVERSIDAD AGRARIA DEL ECUADOR
FACULTAD DE CIENCIAS AGRARIAS
TECNOLOGIA EN COMPUTACIÒN E INFORMÁTICA Portada
Monografía
ANÁLISIS COMPARATIVO DE LAS PLATAFORMAS
TMOTE Y MICAZ EN REDES INALÁMBRICAS DE
SENSORES
LÍNEA DE INVESTIGACIÓN INGENIERÍA DE SOFTWARE
AUTOR
BRAVO MERA CARLOS ENRIQUE
BALZAR – ECUADOR
2020

2
UNIVERSIDAD AGRARIA DEL ECUADOR
FACULTAD DE CIENCIAS AGRARIAS
CARRERA DE TECNOLOGÍA EN COMPUTACIÓN E INFORMÁTICA
ANÁLISIS COMPARATIVO DE LAS PLATAFORMAS
TMOTE Y MICAZ EN REDES INALÁMBRICAS DE
SENSORES
MONOGRAFÍA
Trabajo de titulación presentado como requisito para la obtención del título de
TECNÓLOGO EN COMPUTACIÓN E INFORMÁTICA
AUTOR
BRAVO MERA CARLOS ENRIQUE
TUTORA
LCDA. LOOR CAICEDO GINA MGE.
BALZAR – ECUADOR
2020

3
UNIVERSIDAD AGRARIA DEL ECUADOR
FACULTAD DE CIENCIAS AGRARIAS
CARRERA DE TECNOLOGÍA EN COMPUTACIÓN E INFORMÁTICA
CERTIFICACIÓN DE ACEPTACIÓN DEL TUTOR
Yo, LOOR CAICEDO GINA MGE., docente de la Universidad Agraria del Ecuador,
en mi calidad de Tutora, certifico que el presente trabajo de titulación: ANÁLISIS
COMPARATIVO DE LAS PLATAFORMAS TMOTE Y MICAZ EN REDES
INALÁMBRICAS DE SENSORES, realizado por el estudiante BRAVO MERA
CARLOS ENRIQUE; ha sido orientado y revisado durante su ejecución; y cumple
con los requisitos técnicos exigidos por la Universidad Agraria del Ecuador; por lo
tanto se aprueba la presentación del mismo.
Atentamente,
Lcda. Gina Loor Caicedo MGE.
TUTORA Guayaquil, 28 de julio del 2020

4
APROBACIÓN DEL TRIBUNAL DE SUSTENTACIÓN

5
Dedicatoria
Dedico este trabajo a Dios, a mis padres, a mi
esposa, a mis hijos y familia quienes siempre me
han motivado y dado las fuerzas para salir adelante
y obtener este título que con gran esfuerzo y
dedicación lo he podido conseguir.

6
Agradecimiento
A Dios por estar siempre conmigo en todos los
momentos de mi vida por darme inteligencia y
sabiduría para resolver los problemas que se me
han presentado en mi camino.
Además, agradezco de la manera más sincera:
A las autoridades de la Universidad Agraria del
Ecuador.
Al PhD Jacobo Bucaram Ortiz. Rector Fundador de
la Universidad.
A la PhD Martha Bucaram de Jorgge, Rectora de la
Universidad.
Al PhD Javier Del Cioppo Morstadt, Vice-Rector de
la Universidad.
A la MSc. Emma Jácome Murillo, Decana de la
Facultad de Ciencias Agrarias
A los maestros del Programa Regional de
Enseñanza Balzar de la Universidad Agraria del
Ecuador.
A mi tutora quien me ha guiado en mi trabajo
monográfico con profesionalismo y dedicación
A todos mis compañeros y amigos.

7
Autorización de Autoría Intelectual
Yo, BRAVO MERA CARLOS ENRIQUE, en calidad de autor del proyecto
realizado, sobre “ANÁLISIS COMPARATIVO DE LAS PLATAFORMAS TMOTE Y
MICAZ EN REDES INALÁMBRICAS DE SENSORES”, por la presente autorizo a
la UNIVERSIDAD AGRARIA DEL ECUADOR, hacer uso de todos los contenidos
que me pertenecen o parte de los que contienen esta obra, con fines
estrictamente académicos o de investigación.
Los derechos que como autor me correspondan, con excepción de la presente
autorización, seguirán vigentes a mi favor, de conformidad con lo establecido en
los artículos 5, 6, 8; 19 y demás pertinentes de la Ley de Propiedad Intelectual y
su Reglamento.
____________________________
BRAVO MERA CARLOS ENRIQUE
C.I. 0915925796
Guayaquil, 28 de julio del 2020
8
Índice general
Portada ................................................................................................................... 1
Certificación de aceptación del tutor ...................................................................... 3
Aprobación del tribunal de sustentación ................................................................. 4
Dedicatoria ............................................................................................................. 5
Agradecimiento ...................................................................................................... 6
Autorización de Autoría Intelectual ......................................................................... 7
Índice general ......................................................................................................... 8
Índice de tablas .................................................................................................... 10
Índice de figuras ................................................................................................... 11
Resumen .............................................................................................................. 12
Abstract ................................................................................................................ 13
1. Introducción ...................................................................................................... 14
1.1 Importancia o caracterización del tema .......................................................... 14
1.2 Actualidad del tema ........................................................................................ 15
1.3 Novedad científica .......................................................................................... 16
1.4 Justificación del tema ..................................................................................... 16
1.5 Objetivos ........................................................................................................ 17
1.5.1 Objetivo general .......................................................................................... 17
1.5.2 Objetivos específicos................................................................................... 17
2. Aspectos metodológicos .............................................................................. 18
2.1 Materiales ....................................................................................................... 18
2.1.1 Recursos Bibliográficos ............................................................................... 18
2.1.2 Materiales e insumos ................................................................................ 18
2.1.3 Recursos humanos ................................................................................... 18

9
2.2 Métodos ......................................................................................................... 18
2.2.1 Modalidad y tipo de investigación ........................................................... 18
2.2.2 Tipos de métodos ...................................................................................... 19
2.3 Marco legal ..................................................................................................... 21
3. Análisis y revisión de la literatura ..................................................................... 24
3.1 Plataforma Tmote utilizada en las redes de sensores inalámbricas ............... 24
3.1.1 Microcontrolador MSP430 - TinyOS ............................................................ 26
3.1.2 Transceptor Chipcon CC2420 ..................................................................... 33
3.1.3 Redes de malla con TinyOS e IEEE 802.15.4 ............................................. 35
3.2 Plataforma Micaz empleada en las redes de sensores inalámbricas ............. 40
3.2.1 Hardware y software ................................................................................... 42
3.2.2 Consumo de energía ................................................................................... 46
3.3 Comparación de las plataformas Tmote y Micaz en redes de sensores
inalámbricas ......................................................................................................... 47
4. Conclusiones .................................................................................................... 52
5. Recomendaciones ............................................................................................ 54
6. Bibliografía ....................................................................................................... 55
7. Glosario ............................................................................................................ 61
8. Anexos ............................................................................................................. 63

10
Índice de tablas
Tabla 1. Especificaciones técnicas de la plataforma Tmote ................................. 63
Tabla 2. Especificaciones técnicas de la plataforma MicaZ ................................. 64
Tabla 3. Comparación de las principales características de Tmote vs MicaZ ...... 65
Tabla 4. Comparación de los sistemas de comunicación de Tmote vs MicaZ ..... 66
Tabla 5. Características del transceptor utilizado por Tmote y MicaZ .................. 66

11
Índice de figuras
Figura 1. Topología de red de malla preliminar .................................................... 67
Figura 2. Topología de red de malla que incluye información de enrutamiento ... 67
Figura 3.Topología de red de malla con ruta de enrutamiento ideal resaltada ..... 68
Figura 4. Descripción general del sistema ........................................................... 68
Figura 5. Esquema de partes de Tmote ............................................................... 69
Figura 6. Arquitectura de abstracción de hardware de TinyOS. ........................... 69
Figura 7. Mote MicaZ ........................................................................................... 70
Figura 8. Mote Tmote ........................................................................................... 70
Figura 9. Microcontrolador CC2420 ..................................................................... 71

12
Resumen
Este trabajo monográfico está enfocado en el análisis comparativo de las
plataformas Tmote y MicaZ en redes inalámbricas de sensores dividiendo la
investigación en tres secciones; la primera describe la plataforma Tmote utilizada
en las redes de sensores inalámbricas; la segunda, detalla las principales
características de la plataforma MicaZ; mientras que la tercera, compara ambas
plataformas. Ambas motas presentan una arquitectura muy similar basada en un
microcontrolador junto con un transceptor inalámbrico y algunos sensores para
medir variables físicas. La principal diferencia entre ellos es el microcontrolador,
ya que el Tmote Sky utiliza el Texas Instruments MSP430F1611 y MICAz
depende del Atmel Atmega128, pero ambos incluyen el mismo transceptor
inalámbrico: el CC2420 de Texas Instruments.
Palabras claves: Crossbow, Microcontrolador, Sistemas operativos, TelosB,
TinyOS.

Abstract
This monographic work is focused on the comparative analysis of the Tmote and
MicaZ platforms in wireless sensor networks, the research was composed into
three sections; the first describes the Tmote platform used in wireless sensor
networks; the second, details the main characteristics of the MicaZ platform; while
the third compares both platforms. Both specks show a very similar
microcontroller-based architecture along with a wireless transceiver and some
sensors to measure physical variables. The main difference between them is the
microcontroller, since the Tmote Sky uses the Texas Instruments MSP430F1611
and MICAz depends on the Atmel Atmega128, but both include the same wireless
transceiver: the CC2420 from Texas Instruments.
Keywords: Crossbow, Microcontroller, Operating systems, TelosB, TinyOS.

14
1. Introducción
1.1 Importancia o caracterización del tema
Las redes de sensores inalámbricos - WSN tienen diversas aplicaciones que
incluyen monitoreo de salud humana, operaciones de rescate, control de HVAC
(heating-calefacción, Ventilating-ventilación y air conditioned-aire acondicionado,
monitoreo ambiental, monitoreo de infraestructura civil, agricultura de precisión,
seguimiento de animales, gestión de la cadena de suministro, Internet de las
cosas, entre muchas más.
Para satisfacer las necesidades de diseño de aplicaciones versátiles de WSN,
hay varios nodos comerciales disponibles en el mercado. Cada nodo consta de
los siguientes subsistemas de hardware: fuente de alimentación; lógica
computacional; almacenamiento; Módulos de radio y transductores de sensor. Los
subsistemas de software consisten en: microcódigo del sistema operativo (o
middleware) para proteger el software de la funcionalidad a nivel de máquina;
controladores del sensor para proteger los programas de aplicación de la
funcionalidad a nivel de máquina del sensor; controladores de comunicación para
gestionar las minucias de la radio.
Los avances en la tecnología de sensores basada en el sistema
microelectromecánico han llevado al desarrollo de nodos de sensores
miniaturizados y baratos, capaces de comunicarse de forma inalámbrica, detectar
y realizar cálculos. Un nodo sensor inalámbrico está compuesto por un
microcontrolador, transceptor, temporizador, memoria y convertidor analógico a
digital. Los nodos de sensores se implementan para monitorear una multitud de
fenómenos naturales y provocados por el hombre, es decir, monitoreo de
habitantes, monitoreo de vida silvestre, monitoreo de pacientes, monitoreo y

15
control de procesos industriales, vigilancia de campo de batalla, control de tráfico
y automatización del hogar, por nombrar solo algunos.
Los recursos principales y más críticos son la energía, que normalmente es
proporcionada por una batería; y, la memoria principal muy limitada, que a
menudo permite almacenar solo unos pocos kilobytes. El microcontrolador
utilizado en un nodo sensor inalámbrico funciona a baja frecuencia en
comparación con las unidades de procesamiento contemporáneas tradicionales.
Mica2 y MicaZ son las tecnologías mote de segunda y tercera generación de
CrossBow Technology, utilizando un controlador Atmega128L junto con un
módulo RF CC1000 / CC2420 respectivamente. Además están equipados con
sensores de humedad, temperatura y luz, con soporte de interfaz para conectar
sensores que se conectan directamente a la mota; siendo capaces de medir la
presión barométrica, la aceleración / actividad sísmica, así como realizar el
monitoreo de la presión, de la salud estructural, entre otros.
La plataforma Tmote está equipada con la radio Chipcon CC2420, lo que
permite una comunicación inalámbrica que cumple con el estándar IEEE802.15.4.
Ofrece capacidades confiables de comunicación inalámbrica y administración de
energía para garantizar un bajo consumo de energía.
1.2 Actualidad del tema
Las redes de sensores inalámbricos en los últimos años, han evolucionado
considerándose una tecnología moderna en expansión, que admite muchas
aplicaciones como el monitoreo de edificios, control ambiental, monitoreo de
hábitat de vida silvestre, detección de incendios forestales, automatización
industrial, militar, seguridad, y cuidado de la salud; existiendo diversas

16
plataformas de hardware para facilitar el desarrollo de aplicaciones WSN
(Sanmartín y Álvarez, 2018).
1.3 Novedad científica
El auge en el uso de redes de sensores inalámbricos ha provocado que
diferentes fabricantes de chips desarrollen nuevos circuitos adecuadamente
integrados para este tipo de aplicaciones. Este hecho es bastante relevante y
permitirá en un futuro próximo que el desarrollo de aplicaciones inalámbricas
aumente considerablemente. El desarrollo futuro de esta tecnología integrará más
funciones y reducirá el tamaño. En este sentido, la contribución de los fabricantes
de silicio será muy importante para reducir el precio y el tamaño (Aguilera, 2019).
1.4 Justificación del tema
En la última década, el diseño de hardware para WSN es una de las áreas más
investigadas en la comunidad científica y se han propuesto varias plataformas de
hardware para WSN y el diseño de hardware implementado sigue siendo un
problema crítico ya que los procesadores de baja potencia computacionalmente
eficientes, los transceptores de baja potencia, el almacenamiento capaz área,
larga vida, pequeño tamaño y bajo costo entran en contradicción entre sí.
Por esta razón este trabajo monográfico pretende realizar un análisis
comparativo de las plataformas Tmote y Micaz, disponibles comercialmente con
parámetros de comparación de las características físicas como tamaño, peso,
duración de la batería; especificaciones eléctricas para microprocesador y
transceptor de radio utilizados en el diseño de mote; mediante los siguientes
objetivos.

17
1.5 Objetivos
1.5.1 Objetivo general
Analizar las plataformas Tmote y Micaz empleadas en redes inalámbricas de
sensores mediante una recopilación bibliográfica para una comparación de sus
características físicas y especificaciones eléctricas.
1.5.2 Objetivos específicos
Describir la plataforma Tmote utilizada en las redes de sensores
inalámbricas.
Detallar la plataforma Micaz empleada en las redes de sensores
inalámbricas.
Comparar las plataformas Tmote y Micaz en redes de sensores
inalámbricas.

18
2. Aspectos metodológicos
2.1 Materiales
2.1.1 Recursos Bibliográficos
Este trabajo monográfico se realizó con los siguientes recursos bibliográficos:
Publicaciones informáticas.
Libros, revistas y demás materiales informáticos.
Biblioteca digital de la Universidad Agraria.
Bibliotecas de otras Universidades.
Portales web de libros digitales.
2.1.2 Materiales e insumos
A continuación, los siguientes materiales e insumos que se utilizaron:
Computador portátil o de escritorio.
Dispositivos de almacenamiento.
Microsoft office y otras herramientas de tratamiento de texto.
Impresora.
Papelería y otros materiales de oficina.
2.1.3 Recursos humanos
Se contó con la colaboración del Tutor monográfico como recurso humano, se
suma a ello el alumno desarrollador, otros docentes de la Universidad Agraria del
Ecuador.
2.2 Métodos
2.2.1 Modalidad y tipo de investigación
El tipo de investigación, orienta la finalidad general del estudio y la manera
como se recogieron los datos. Para seleccionar el tipo de investigación se

19
consideró el propósito, las estrategias, los objetivos y otros aspectos en los que
se encuentran inmersos la investigación.
Este trabajo se enmarca dentro del tipo de investigación descriptiva, lo que
permitió medir la información recolectada para luego describir, analizar e
interpretar sistemáticamente las características del tema con base en la realidad
del escenario planteado.
2.2.2 Tipos de métodos
El enfoque metodológico a usar se enmarca en la investigación bibliográfica,
documental y de tipo monográfico, basándose en la búsqueda, compilación,
análisis las plataformas Tmote y Micaz en redes de sensores inalámbricos por
medio de artículos, notas, libros, ensayos y otras fuentes de información como el
Centro de Información de la Universidad Agraria del Ecuador y su biblioteca
virtual. A continuación se detallan los diferentes métodos utilizados en este trabajo
monográfico.
2.2.2.1 Método bibliográfico
Este método es importante ya que permitió realizar la investigación bibliográfica
y documental, mediante el uso de libros, folletos, revistas y demás fuentes de
datos informáticos relacionados a las plataformas Tmote y Micaz en redes de
sensores inalámbricos, lo que permitió recopilar los datos que luego fueron
sujetos al análisis.
2.2.2.2 Método inductivo
Con esta metodología, y apoyado por la observación, partiremos de lo
particular indicando la arquitectura de las plataformas Tmote y Micaz en las redes
de sensores inalámbricos para concluir de forma general con una comparación
entre las mismas.

20

21
2.2.2.3 Método deductivo
Dentro del proceso de la investigación este método permitió un análisis
general de las plataformas Tmote y Micaz utilizadas en las redes de sensores
inalámbricos. Todos los análisis se derivaron de aspectos particulares que
generaron conocimientos aportando una mayor comprensión de cada una de
ellas. El método deductivo trata de diseminar aspectos generales para llegar a
premisas particulares.
2.2.2.4 Método analítico
Este método distinguió elementos que permitiron descomponer los procesos
múltiples y variados, en partes o definiciones básicas en lo que respecta al
análisis las plataformas Tmote y Micaz de las redes de sensores inalámbricos.
Este análisis ayudó a una comprensión específica de cada una de las plataformas
para posteriormente realizar una comparación que permita discernir la mejor
opción.
2.2.3 Técnicas
Para la realización del presente trabajo monográfico, se utilizó la técnica de
investigación bibliográfica, permitiendo la recopilación, el análisis y la selección de
la información, donde se fundamenta y complementa la investigación con las
teorías de diferentes autores.
2.3 Marco legal
Esta investigación monográfica se basó en los siguientes artículos
Constitución de la República del Ecuador:
Artículo 16.- Todas las personas, en forma individual o colectiva, tienen derecho a: 1. Una comunicación libre, intercultural, incluyente, diversa y participativa, en todos los ámbitos de la interacción social, por cualquier medio y forma, en su propia lengua y con sus propios símbolos. 2. El acceso universal a las tecnologías de información y comunicación. 3. La creación de medios de comunicación social, y al acceso en igualdad de condiciones al uso de las frecuencias del espectro radioeléctrico para la gestión de estaciones de

22
radio y televisión públicas, privadas y comunitarias, y a bandas libres para la explotación de redes inalámbricas. 4. El acceso y uso de todas las formas de comunicación visual, auditiva, sensorial y a otras que permitan la inclusión de personas con discapacidad. 5. Integrar los espacios de participación previstos en la Constitución en el campo de la comunicación.
Artículo 313.- El Estado se reserva el derecho de administrar, regular, controlar y gestionar los sectores estratégicos, de conformidad con los principios de sostenibilidad ambiental, precaución, prevención y eficiencia. Los sectores estratégicos, de decisión y control exclusivo del Estado, son aquellos que por su trascendencia y magnitud tienen decisiva influencia económica, social, política o ambiental, y deberán orientarse al pleno desarrollo de los derechos y al interés social. Se consideran sectores estratégicos la energía en todas sus formas, las telecomunicaciones, los recursos naturales no renovables, el transporte y la refinación de hidrocarburos, la biodiversidad y el patrimonio genético, el espectro radioeléctrico, el agua, y los demás que determine la ley.
Artículo 314 de la Constitución de la República, el Estado será responsable de la provisión de los servicios públicos, entre otros, el de telecomunicaciones y dispondrá que los precios y tarifas de estos servicios público (Asamblea Constituyente, 2018).
Ley orgánica de telecomunicaciones:
Artículo 2.- Ámbito. La presente Ley se aplicará a todas las actividades de establecimiento, instalación y explotación de redes, uso y explotación del espectro radioeléctrico, servicios de telecomunicaciones y a todas aquellas personas naturales o jurídicas que realicen tales actividades a fin de garantizar el cumplimiento de los derechos y deberes de los prestadores de servicios y usuarios. Las redes e infraestructura usadas para la prestación de servicios de radiodifusión sonora y televisiva y las redes e infraestructura de los sistemas de audio y vídeo por suscripción, están sometidas a lo establecido en la presente Ley.
Artículo 3.- Objetivos. Son objetivos de la presente Ley:
3. Incentivar el desarrollo de la industria de productos y servicios de telecomunicaciones.
4. Promover y fomentar la convergencia de redes, servicios y equipos.
5. Promover el despliegue de redes e infraestructura de telecomunicaciones, que incluyen audio y vídeo por suscripción y similares, bajo el cumplimiento de normas técnicas, políticas nacionales y regulación de ámbito nacional, relacionadas con ordenamiento de redes, soterramiento y mimetización. 6. Promover que el país cuente con redes de telecomunicaciones de alta velocidad y capacidad, distribuidas en el territorio nacional, que permitan a la población entre otros servicios, el acceso al servicio de Internet de banda ancha (Asamblea Nacional República del Ecuador, 2015).

23

24
3. Análisis y revisión de la literatura
3.1 Plataforma Tmote utilizada en las redes de sensores inalámbricas
Esta plataforma fue desarrollada por la compañía Moteiv basado en el mote
Telosb. Utiliza el procesador MSP 430 de la compañía Texas
Instruments y el chip CC2420 de la compañía Chip con que integra el estándar
802.15.4 para comunicaciones inalámbricas. El consumo de
potencia extremadamente bajo del procesador MSP 430 lo ha hecho ideal para
su uso en redes de sensores. Tmote Sky tiene integrado sensores, radio,
antena y cuenta con capacidad de programación (Cota, Aguiler, y Licea, 2012).
Las características de la plataforma Tmote Sky son:
1. Transmisor Chipcon inalámbrico de 250Kbps 2.4GHz IEEE 802.15.4
2. Interactúa con otros dispositivos IEEE 802.15.4
3. Microcontrolador MSP430 Texas Instruments de 8MHz (10Kb de RAM y 48
Kb de Flash)
4. ADC, DAC, supervisor de voltaje y controladora DMA integrada.
5. Antena, sensores de humedad, temperatura y luz.
6. Muy bajo consumo.
7. Rápido en despertar del sueño (<6 μs).
8. Hardware para encriptación y autenticación de la capa de enlace
9. Programación y recogida de datos por USB
10. 16 pines para soportar una expansión y conector de antena opcional SMA
11. Ayuda de TinyOS: enrutamiento de malla e implementación de las
comunicaciones
12. Cumple con los requisitos FCC Parte 15 (Ecured, 2016)

25
Según lo expresado por los autores Tmote es un sensor inalámbrico de baja
potencia. Tmote Sky es el módulo de sensor inalámbrico que tiene muchas cosas
que ofrecer, como aplicaciones de red de sensores de alta velocidad de datos que
requieren una potencia ultrabaja. También ofrece un controlador DMA que
aumenta el rendimiento. Son nodos de sensores inalámbricos IEEE 802.115.4
basados en la plataforma original de código abierto TelosB y Tmote Sky que fue
diseñada y desarrollada por la Universidad de California, Berkeley. Este tipo de
sensores generalmente incluye la medición de humedad relativa, temperatura y
luz a través de sensores.
Tmote Sky es un dispositivo de aplicaciones en redes de sensores de muy bajo
consumo de voltaje y alta funcionabilidad. Lleva integrados tanto los sensores
como la radio, antena y microcontrolador, además puede ser fácilmente
programado, usa un controlador USP de FTDI para comunicarse con el
ordenador; además contiene una radio Chipcon CC2420 la que usa un
estándar IEEE 802.15.4 (García, Mora, y García, 2018).
Los componentes principales de la plataforma de nodo de sensor Tmote son el
microcontrolador TI MSP430F1611, la interfaz USB FTDI FT232BM, que
permite programar el microcontrolador a través de USB y el chip de radio de
baja potencia Chipcon CC2420 para la comunicación inalámbrica. El CC2420
es controlado por el microcontrolador TI MSP430 a través del puerto SPI y una
serie de E / S digitales (Bichoff, Meyer, y Feltrin, 2014).
La gestión y configuración de la misma se lleva a cabo remotamente a través
de una página web sobre HTTP. Además, es posible enviar comandos desde
un PC hacia la pasarela: recuperar el estado del mote (fabricante, número de
serie, paquetes leídos/escritos…), reiniciar motes y/o servidor de datos, ajustar

26
la velocidad de transferencia, incluso es posible reprogramar la imagen binaria
de un sensor de forma remota mediante la aplicación netbsl (Tarifa y Escaño,
2014).
Es un dispositivo muy popular en el tema de redes de sensores, el dispositivo
cuanta con muchas opciones de configuración debido a que está equipado con
sensores, interfaces de interconexión USB, líneas de expansión para instalarle
antenas externas y múltiples opciones de alimentación. Además, su bajo costo
hace de este dispositivo muy atractivo para iniciar proyectos en internet de las
cosas (Coronado, 2016).
De acuerdo a lo manifestado por los autores algunas características a tener en
cuenta en las plataformas Tmote son la alta confiabilidad y la facilidad de
desarrollo; siendo ampliamente probada para implementaciones de sistemas de
sensores inalámbricos; ofreciendo una serie de periféricos integrados que
incluyen un ADC de 12 bits y protocolos de bus DAC, Timer, 12C SPI y UART.
3.1.1 Microcontrolador MSP430 - TinyOS
TinyOS es una plataforma de software diseñada específicamente con redes de
sensores inalámbricos en mente. Como tal, incluye enrutamiento integrado de
múltiples tiendas, que implementa redes de malla sin ningún desarrollo
adicional, y un modo de ahorro de energía sincronizado de bajo ancho de
banda. El modo de bajo ancho de banda mantiene a los nodos en un modo de
bajo consumo la mayor parte del tiempo, mientras los mantiene sincronizados
para transmitir y recibir. Esto permite que cada nodo "duerma", ahorrando
batería, pero sincrónicamente hace que toda la red se active y envíe su
información al mismo tiempo cuando sea necesario (Tandazo, 2015).

27
Mientras que el MSP430 ejecuta TinyOS, la mayoría del desarrollo de
aplicaciones se realiza en el lenguaje C de los sistemas integrados en la red, o
NesC. NesC es el lenguaje de programación diseñado para crear aplicaciones
en el entorno TinyOS; proporcionando un modelo de programación basado en
eventos sobre el lenguaje C, abstrayendo la funcionalidad C de bajo nivel en un
lenguaje de nivel superior diseñado para sistemas integrados en red. Como tal,
maneja de manera abstracta los problemas potenciales relacionados con los
sistemas distribuidos (Castillo & Villarreal, 2017).
Los microcontroladores MSP430 fueron diseñados por Texas Instruments, para
aplicaciones de ultra bajo consumo. Originalmente el core MSP430 es de 16
bits de direccionamiento y 16 bits de bus de datos, sin embargo fue extendido
el rango de memoria, modificando además la arquitectura con un
direccionamiento de 20 bits y un bus de datos de 16 bits, que es compatible
con la versión original, cuyas características son:
RISC
Arquitectura ortogonal
Von Neumann
Acceso directo a todos los registros
Transferencias de memoria a memoria directas.
Modos de direccionamiento de 8, 16 y 20 bits.
Instrucciones de 2, 4, 6 y 8 bytes (Díaz, 2017).
Los registros del MSP430X son de 20bits, de los que doce son de propósito
general, y otros tres están reservados para:

28
Program Counter (R0): Almacena la dirección de memoria de la siguiente
instrucción. Su valor siempre es un numero par, debido a la alineación con las
instrucciones que siempre comienzan en un address par (LSb = 0).
Stack Pointer (R1): Dirección de memoria del stack. Debe ser inicializado por
el usuario.
Status Register (R2): Registro de status donde se almacenan los bits de los
resultados de las operaciones, los bits de configuración de los modos de
operación y la bandera de habilitación global de interrupciones (GIE). Es un
registro de 16 bits, donde solo 11 bits son usables (Bucafusco, 2016).
Las operaciones se realizan a través del microcontrolador MSP430 - F1611, de
8MHz (10Kb de RAM, 48Kb de Flash). Este procesador RISC de 16 bits
consume muy poca batería, pero para reducir al máximo este consumo
permanece en estado sleep durante la mayoría del tiempo, se despierta para la
adquisición, procesado y transmisión de datos y vuelve a estado sleep;
interactuando con otros dispositivos IEEE 802.15.4 (Pérez, 2012).
De acuerdo a lo expuesto por los autores el MSP430 es un microcontrolador
simple de 16 bits con una CPU compacta y económica, adecuado para
aplicaciones de baja potencia: una gran variedad de periféricos para entrada y
salida analógica; tiempo de activación del procesamiento rápido; El tratamiento de
los datos y la dirección en pie de igualdad. Utiliza el lenguaje de programación C
desde el principio, pero los programas también se desarrollan en lenguaje
ensamblador para mostrar cómo un programa interactúa con el hardware. La CPU
a menudo se describe como una computadora de conjunto de instrucciones
reducido (RISC). Tanto la dirección como los buses de datos son de 16 bits
amplio. Los registros en la CPU también tienen 16 bits de ancho y se pueden usar
29
indistintamente para datos o direcciones. Esto hace que el MSP430 sea más
simple que un procesador de 8 bits con direcciones de 16 bits.
3.1.1.1 Memoria
El tamaño de la memoria MSP 430 es de hasta 64K bytes o 2,16 bytes. Tener
un bus de direcciones de 16 bits significa que el controlador puede acceder a
2,16 ubicaciones de memoria diferentes. Cada ubicación de memoria está
compuesta por ocho bits separados, lo que hace que cada ubicación tenga un
byte de ancho. El símbolo K se usa para referirse al tamaño de memoria de
1024, por lo tanto, 64K significa que se tiene 64 x 1024 = 65536 bytes a los que
se puede acceder en el microcontrolador MSP430. El espacio de memoria de
64K se divide en varias secciones diferentes, todas con diferentes propósitos
(Barrett & Pack, 2011).
Memoria de código
La memoria de programa se puede integrar como memoria programable
(EPROM) o máscara programable (ROM). Los miembros estándar de la familia
MSP430 admiten OTP y versiones programadas con máscara (Hurni, 2012).
Memoria de datos (RAM)
La memoria de datos está conectada a la CPU a través de dos buses: el bus de
direcciones de memoria - MAB y el bus de datos de memoria - MDB. La
memoria de datos puede integrarse en el miembro específico de la familia con
ancho de datos completo - Word o con ancho de datos reducido - byte. La
memoria de acceso aleatorio (RAM) es volátil. Es decir, solo retiene el
contenido de su memoria mientras el poder está presente. Dentro de un
sistema de microcontrolador, la memoria RAM se usa para almacenar variables
globales (Barrett & Pack, 2011).

30
Según lo manifestado por los autores RAM significa memoria de acceso
aleatorio, perdiendo el contenido cuando pierde energía, por lo que solo es útil
cuando se enciende un chip. Puede cambiar cualquier parte de la RAM en
cualquier momento: es el más flexible de todos los tipos de memoria. La RAM se
usa para almacenar variables y hacer cálculos.
Memoria flash
La memoria flash es una de las memorias no volátiles más populares para
almacenar código de programa y valores de datos constantes. La memoria
flash principal MSP430 tiene un tamaño de segmento de 512 bytes. Todos los
dispositivos MSP430 también tienen algunos segmentos flash más pequeños
de 04 bytes o 128 bytes. Esta área del flash se llama memoria de información.
En la mayoría de las aplicaciones, la memoria principal almacena el código del
programa y los valores de datos constantes, y la memoria de información se
usa para datos de calibración, números de serie, etc. Excepto por el tamaño del
segmento, no hay diferencia entre la memoria principal y la memoria de
información. Por lo tanto, ambos pueden almacenar código de programa o
valores de datos constantes o ambos (Forstner, 2015).
De acuerdo a lo expuesto por el autor la memoria flash retiene su contenido
cuando pierde energía, es decir que todo lo que se ponga en la memoria flash
permanece allí después de que se apaga un chip, y sigue ahí la próxima vez que
se encienda el chip. Esto hace que la memoria flash sea un excelente lugar para
colocar las instrucciones que componen su programa. La desventaja es que el
flash no se puede cambiar fácilmente: si desea cambiar un valor en flash, primero
tiene que borrar un fragmento de flash y luego reescribir todo en el fragmento de
flash que acaba de borrar incluyendo su nuevo valor.

31
3.1.1.2 Control de operación
Las operaciones de los diferentes miembros del MSP430 se controlan
principalmente con la información almacenada en registros de funciones
especiales, SFT. Los diferentes bits en los SFR permiten interrupciones,
admiten el software en el estado de los indicadores de interrupción y definen
los modos de funcionamiento de los periféricos. Los periféricos que están
deshabilitados detienen su funcionamiento funcional para reducir el consumo
de corriente. Todos los datos almacenados en el registro del módulo se
conservan. El conector JTAG está disponible para depurar el sistema mientras
el programa está ejecutando (Díaz, 2015).
De acuerdo a lo manifestado por el autor el diseño del MSP430 fue impulsado
por la necesidad de proporcionar una capacidad completa en tiempo real y al
mismo tiempo exhibir un consumo de energía extremadamente bajo. El consumo
de energía promedio se reduce al mínimo al ejecutar la CPU y ciertas otras
funciones del MSP430 solo cuando es necesario. El resto del tiempo la energía se
conserva manteniendo activas solo las funciones periféricas seleccionadas de
baja potencia. Pero para tener una verdadera capacidad en tiempo real, el
dispositivo debe poder pasar de un modo de baja potencia con la CPU apagada a
un modo completamente activo con la CPU y todas las demás funciones del
dispositivo operando nominalmente en muy poco tiempo.
3.1.1.3 Periféricos
Los módulos de periféricos están conectados a la CPU a través del bus de
direcciones de memoria MAB, el bus de datos de memoria MDB e interrumpen
el servicio y las líneas de solicitud. El MAB suele ser un bus de 5 bits para la
mayoría de los periféricos. El MDB es un bus de 8 o 16 bits. Los módulos con

32
un bus de datos de 8 bits se conectan mediante circuitos de conversión de bus
a la CPU de 16 bit. Los periféricos incluyen temporizadores, temporizador de
vigilancia, reloj en tiempo real, puertos, ADC, comparador, comunicación en
serie como UART, SPI, I2C (Barrett & Pack, 2011).
Según lo expuesto por los autores los módulos periféricos consisten en todos
los registros periféricos en chip que se asignan al espacio de direcciones. Se
puede acceder a estos módulos con instrucciones de byte o palabra, dependiendo
de si el módulo periférico es de 8 o 16 bits respectivamente.
3.1.1.4 Arquitectura RISC
Las arquitecturas RISC típicas muestran su rendimiento más alto en
aplicaciones de cálculo intensivo en las que varios registros se cargan con
datos de entrada, todos los cálculos se realizan dentro de los registros y los
resultados se almacenan nuevamente en la RAM. Los accesos a la memoria
(usando los modos de direccionamiento) son necesarios solo para las
instrucciones cargar al principio y las instrucciones almacenar al final de los
cálculos. El MSP430 se puede programar para tal operación, por ejemplo,
realizando una tarea de cálculo puro en el punto flotante sin ningún acceso de
E / S (Texas Instruments, 2016).
El MSP430 tiene una CPU RISC de 16 bits, llamándolo simplemente RISC, que
tiene cuatro características principales que son:
Pequeño conjunto de instrucciones de uso general.
Gran banco de registros de uso general: se utiliza tanto para datos como
para direcciones.

33
Arquitectura de carga y almacenamiento: en la cual las instrucciones que
procesan datos usan solo los registros en la CPU y no pueden operar
directamente en la memoria.
Ejecución de ciclo único (Davies, 2015).
Según lo expresado por los autores el microcontrolador MSP430 tiene una RIsc
de 16 bits donde los datos se cargan en los registros que permiten la realización
de cálculos, cuyos resultados son almacenados en la memoria RAM. Risc cuenta
con instrucciones generales, un banco de registros empleados para el uso de
datos y direcciones, una arquitectura de carga y almacenamiento y un ciclo único
de ejecución.
3.1.2 Transceptor Chipcon CC2420
Tmote maneja una radio Chipcon CC2420, la cual es un estándar IEEE
802.15.4 que provee una fiable comunicación inalámbrica para redes de
sensores inalámbricas. La radio tiene la posibilidad de enviar datos a muy alta
frecuencia. El microcontrolador se comunica con la antena a través del puerto
SPI y puede apagarlo para las operaciones de baja energía. La antena interna
„Invertid –F micro strip‟ es una antena pseudo-omnidireccional que puede
alcanzar los 50 metros dentro de un edificio y los 125 en el exterior (Narvaez,
2013).
Chipcon de Texas Instrument proporciona una aplicación que permite
monitorizar y configurar los distintos dispositivos de una red ZigBee sobre la
cual esta implementado el sistema Location. Una buena toma de contacto a la
hora de familiarizarse con el hardware, programar dispositivos y comprender el
sistema monitoriazado (Saenz, 2013).

34
Transceptor integrado en un chip que cumple la norma de radiofrecuencia
conocida como IEEE 802.15.4. Al igual que ocurría con el microcontrolador,
está diseñado para trabajar en aplicaciones de baja tensión y poca potencia de
consumo. Además, permite soporte para manejo de paquetes radio, buffer de
datos, encriptación, indicación de la calidad el canal (Tarifa, Chipcon CC 2420,
2011).
El CC2420 es un dispositivo de bajo coste, está altamente integrado y ofrece
una robusta solución para la comunicación inalámbrica en la banda ISM de 2,4
GHz. El CC2420 proporciona un amplio hardware de apoyo a la manipulación
de paquetes, los Búfer de datos, ráfagas de las transmisiones, la encriptación y
autenticación de los datos y de paquetes de información. Sus características
principales son:
• Chip de 2,4 GHz compatible con IEEE 802.15.4 con base módem y Apoyo
MAC.
• DSSS base módem con 2 MChips y 250 kbps de Tasa efectivo de datos.
• Descarga Bajo consumo (RX: 18,8 MA; TX: 17,4 mA).
• Baja tensión de alimentación (2,1 - 3,6 V) con regulador de voltaje
Integrado.
• Baja tensión de alimentación (1,6 - 2,0 V) con Regulador de tensión
externa.,
• Potencia de salida programable (Calvo, 2012).
De acuerdo a lo manifestado por los autores el Tmote Sky utiliza uno de los
primeros protocolos IEEE 802.15.4 para redes en malla utilizando un transceptor
inalámbrico Chipcon Smart RF CC2420 listo para ZigBee. Este transceptor es una
solución de bajo costo para proporcionar una comunicación inalámbrica robusta

35
en la banda ISM sin licencia. El transceptor proporciona muchas características
deseables, que incluyen un protocolo físico, un protocolo MAC y cifrado AES.
Tmote Sky utiliza estas características para su implementación de redes de malla
TinyOS.
3.1.3 Redes de malla con TinyOS e IEEE 802.15.4
Las capacidades inalámbricas de Tmote Sky se basan en el paradigma de
redes de malla implementado por TinyOS. Esta implementación se describe en
las siguientes secciones (Pérez, 2012).
3.1.3.1 Antecedentes y estándares de redes de baja potencia
El estándar IEEE 802.15.4 define la capa física - PHY y la especificación de la
subcapa del control de acceso al medio - MAC para dispositivos fijos, portátiles
o móviles sin batería o con requerimientos de consumo para baterías limitadas
que operen en redes inalámbricas personales de área local con tasas bajas de
envío de datos - LR-WPAN. Las WPANs son usadas para intercambiar
información sobre distancias relativamente cortas. A diferencia de las redes
inalámbricas de área local - WLAN, las conexiones realizadas a través de una
WPAN requieren de infraestructuras muy sencillas e incluso de ninguna
infraestructura. Esta característica permite implementar soluciones de pequeño
tamaño, eficientes energéticamente y económicas para una amplia gama de
dispositivos (Calvo, 2012).
Se enfatiza el bajo coste de comunicación con nodos cercanos y sin
infraestructura o con muy poca, para favorecer aún más el bajo consumo. En
su forma básica se concibe un área de comunicación de 10 metros con una
tasa de transferencia de 250 kbps. Se pueden lograr tasas aún menores con la
consiguiente reducción de consumo de energía. Como se ha indicado, la

36
característica fundamental de 802.15.4 entre las WPAN's es la obtención de
costes de fabricación excepcionalmente bajos por medio de la sencillez
tecnológica, sin perjuicio de la generalidad o la adaptabilidad (Pérez, 2012).
En el estándar IEEE 802.15.4 se definen dos capas: la física y la de acceso
al medio, también se definen dos tipos de dispositivos: Los que tienen dos
funciones o completas en las WSN - FFD por sus siglas en inglés Full
Function Device, que pueden actuar como coordinadores de la red -
Sink o enrutadores en una topología, Estrella o Malla principalmente; por
otro lado se encuentran los dispositivos con una sola función
principal, capturar datos ó denominados defunciones reducidas - RFD
por sus siglas en inglés Reduced Function Device, que trabajan como
nodos de recepción y envío de datos en el medio donde se ubiquen
(Campaña, 2018).
Según lo expuesto por los autores el estándar IEEE 802.15.4 WPAN
evolucionó como una forma de implementar esta funcionalidad en plataformas
integradas. Las unidades WPAN son menos costosas que otros formatos
inalámbricos, incluidos Bluetooth y Wi-Fi, y son altamente especializadas para
aplicaciones integradas, lo que hace que las redes basadas en WPAN sean una
opción ideal para redes de sensores inalámbricas rentables, caracterizándose por
la electrónica de baja potencia y alta eficiencia.
3.1.3.2 Pila de protocolo de red
El protocolo IEEE 802.15.4 especifica la subcapa de control de acceso medio
(MAC) y la capa física de las redes de área privada inalámbricas de baja
velocidad - LR-WPAN). Aunque este protocolo estándar no se desarrolló
específicamente para las redes inalámbricas de sensores, proporciona

37
suficiente flexibilidad para adaptarse a los diferentes requisitos de las
aplicaciones WSN mediante el ajuste adecuado de sus parámetros. De hecho,
las redes inalámbricas de bajo costo, bajo consumo de energía y de bajo costo
son características clave del protocolo IEEE 802.15.4, que generalmente se
ajusta a los requisitos de WSN. Además, la especificación ZigBee se basa en
las capas de enlace físico y de datos IEEE 802.15.4, que crean las capas de
red y aplicación, definiendo así una pila de protocolos completa para LR-WPAN
(Cunha, Kuoba, Severino, & Alves, 2012).
IEEE 802.15.4 / ZigBee y TinyOS son actualmente palabras de moda, ya que
estas tecnologías han desempeñado un papel importante en el
aprovechamiento de una nueva generación de sistemas integrados en red a
gran escala. La pila de protocolos IEEE 802.15.4 / ZigBee tiene varias
características técnicas interesantes para servir como tecnología de
comunicación federativa para redes de sensores inalámbricos (WSN). TinyOS
es el sistema operativo más extendido para sistemas integrados con recursos
limitados (Cunha, Severino, Pereira, & Alves, 2014).
La pila de protocolos XMesh es una plataforma de control y redes inalámbricas
incrustadas de arquitectura abierta, flexible y potente construida sobre el
sistema operativo TinyOS. XMesh combina alto rendimiento comprobado con
interoperabilidad a través del soporte de estándares abiertos que incluyen IEEE
802.15.4 / ZigBee. Crossbow publica el código fuente para todas las capas de
la pila de redes escritas en forma de componente TinyOS, y la cadena de
herramientas de desarrollo TinyOS es el estándar de facto para sensores
inalámbricos y desarrollo de redes integradas, con más de mil equipos de
desarrollo en todo el mundo (CMT, 2019).

38
Según lo manifestado por los autores los mecanismos básicos de CSMA MAC
están integrados en chips de radio basados en 802.15.4, como CC2420, pero no
proporcionan la flexibilidad total que podría ser requerida por las necesidades
personalizadas del usuario, por lo que la implementación de la pila de red flexible
es una tarea importante. Dado que el chip Chipcon SmartRF proporciona las
capas física y MAC, corresponde a TinyOS implementar las capas de transporte y
red. Lo hace utilizando una capa de enlace de paquete, una implementación
parcial de las capas de transporte y redes diseñadas para garantizar que los
datos se transfieran de manera confiable entre los nodos de la red a pesar de los
paquetes caídos debido al rango, la interferencia o varios factores adicionales.
3.1.3.3 Redes de malla con TinyOS
El sistema operativo TinyOS proporciona confianza en la implementación de
redes ad-hoc, redes en topología de malla y la capacidad de programación
over-the-air. Además proporciona herramientas de desarrollo para la
integración de redes empresariales y una interfaz de usuario del cliente para el
análisis y configuración de la red. Las principales características son:
Tiene una mejor cobertura de radio y el doble de memoria de programa.
Transceptor de RF compatible con IEEE 802.15.4.
Rango de cobertura de hasta 500 metros en línea de vista.
Compatible con la banda ISM (2,4 a 2,4835 GHz).
Compatible con Xmesh.
Modulación DSSS (Direct sequence spread spectrum).
Velocidad de Datos de hasta 250 kbps.
Puertos de expansión para tarjetas de adquisición de datos MENSIC (Peña,
2011).

39
Tmote Sky permite una amplia gama de aplicaciones de red de malla, este
dispositivo cuenta con una carga de respaldo como lo es 2 baterías AA+ la cual
si se queda sin carga esta proporciona alimentación para que siga trabajando
el dispositivo (Tandazo, 2015).
En la topología de malla cada nodo puede enviar y recibir información de otro
nodo y de la puerta de enlace, pudiendo enviar mensajes entre ellos. Esta
topología es altamente tolerante a fallos ya que cada nodo tiene diferentes
caminos para comunicarse con la puerta de enlace. Si un nodo falla, la red se
reconfiguran alrededor del nodo fallido automáticamente. El TinyOS
proporciona los algoritmos de red requeridos para formar una cadena de
comunicación confiable que conecta todos los nodos dentro de la malla
(Hernández, 2018).
De acuerdo a lo expuesto por los autores una topología de red de malla es la
más útil para aplicaciones de red de sensores inalámbricos, las mismas que
están diseñadas de tal manera que cada nodo puede comunicarse entre sí en
la red sin el uso de un esquema de control central. El protocolo de
enrutamiento de la red de malla funciona de la siguiente manera; el nodo fuente
comparte su información de enrutamiento con cada nodo que lo rodea. Cada
nodo realiza esta acción, hasta que se establece una tabla de enrutamiento
completa y toda la información de topología se comparte entre los nodos. Una
vez que los nodos han establecido su tabla de enrutamiento, el nodo de origen
puede enviar sus paquetes de forma segura al nodo de destino a través de la
ruta de enrutamiento ideal. Las redes de malla ad-hoc se escalan
extremadamente bien, son confiables y se pueden adaptar para usar la
mayoría de los procesadores integrados. En la figura 1 se observa una red de
40
malla antes de cualquier comunicación entre nodos, en la figura 2 se indica el
funcionamiento de la red y en la figura 3 se muestra la forma de envío de
paquetes.
3.2 Plataforma Micaz empleada en las redes de sensores inalámbricas
MICAz es un módulo Mote de 2.4 GHz utilizado para habilitar redes de
sensores inalámbricos de baja potencia. Las características del producto
incluyen:
• Transceptor RF compatible con IEEE 802.15.4
• 2.4 a 2.48 GHz, una banda ISM compatible a nivel mundial
• Radio de espectro extendido de secuencia directa que es resistente a la
interferencia de RF y proporciona seguridad de datos inherente
• Velocidad de datos de 250 kbps
• Compatible con la plataforma de red de sensores inalámbricos MoteWorks
™ para redes de malla ad-hoc confiables
• Plug and play con las placas de sensores de Crossbow, las placas de
adquisición de datos, las puertas de enlace y el software (Crossbow, 2018).
Las características expuestas concuerdan con las mencionadas por Torrejón
(2016):
• Transmisión inalámbrica en 2.4 GHz cumpliendo el estándar IEEE 802.15.4
(ZigBee).
• Diseño específico para ser empotrado en otros dispositivos.
• Velocidad de transmisión de 250 Kbps.
• Capacidad de funcionamiento en modo router de cada nodo de la red.

41
• Conector común de expansión para tarjetas sensoras.
• Resistente a interferencia de radiofrecuencia.
• Soporte para uso con MoteWorks.
• Plug and play con tarjetas sensoras, adquisición de datos, puertas de
enlace y software de Crossbow.
• Procesador MPR2400 basado en el microcontrolador de bajo consumo
Atmega128L, que permite el funcionamiento simultaneo de una aplicación y
el control de las comunicaciones de radio a la vez (Torrejón, 2016).
Uno de los principales determinantes del funcionamiento confiable de la red es
la vida útil del nodo. Conservar la energía y el voltaje de la batería de un nodo
tanto como sea posible es importante para muchas aplicaciones de detección,
ya que las variaciones en el nivel de voltaje de la fuente de alimentación
pueden afectar directamente la salida del sensor. Una de estas unidades es el
microcontrolador ATmega128L para nodos MicaZ. Este microcontrolador tiene
diferentes modos de operación, como activo, inactivo, espera prolongada,
apagado, ahorro de energía, reducción de ruido ADC y espera (Baghaee,
Gurbuz, y Oysal, 2013).
De acuerdo a lo expresado por los autores Micaz es un módulo Mote de 2.4
GHz utilizado para habilitar redes de sensores inalámbricos de baja potencia, con
un transceptor RF compatible con IEEE 802.15.4; de 2.4 a 2.48 GHz y una banda
ISM compatible a nivel mundial. El radio de espectro expandido de secuencia
directa que es resistente a la interferencia de RF y proporciona seguridad de
datos inherente; con una velocidad de datos de 250 kbps. Es compatible con la
plataforma de red de sensores inalámbricos MoteWorks para una red de malla

42
confiable y ad-hoc; con un plug and play con las placas de sensores, placas de
adquisición de datos, puertas de enlace y software de Crossbow.
3.2.1 Hardware y software
MicaZ, producto de Crossbow, utiliza un microcontrolador Atmel ATmega 128,
de 8 bits, capaz de ejecutar cada instrucción en un único ciclo de reloj. El
ATmega 128 tiene 128 kB de memoria de programa, 4 kB de EEPROM y 4 kB
de SRAM, además de 53 pines de entrada/salida genéricos, cuatro
temporizadores con función de comparación y modos PWM, dos UARTs, un
bus I2 C y otro SPI, un ADC de 10 bits con 8 canales multiplexados y un
oscilador RC interno (Lajara, 2014).
Este mote es una de las plataformas WSN de Crossbow Technology, Inc. más
utilizadas, la misma que está equipada con un transceptor RF Chipcon CC240
compatible con IEEE 802.15.4 y un microcontrolador Atmega 128L. El MicaZ
mote está equipado con placas de sensores de adquisición de datos
MTS310CB (Crosbow, 2020)
Las motas Micaz son nodos de red inalámbrica completamente funcionales,
alimentados por batería, compatible con 802.15.4 / Zigbee y admite la banda de
frecuencia de 2.4GHz, basándose en los módulos de radio / procesador OEM
de Crossbow (Crossbow, 2018).
TinyOS 2.1.0, un entorno operativo de código abierto basado en eventos,
aplicado como el sistema operativo de las motas MicaZ. Eclipse IDEv3.5.0, que
está equipado con el complemento Yeti2 es un complemento de TinyOS
(Tinyos.net, 2020).
Mica2 / MicaZ están equipados con sensores de humedad, temperatura y luz,
con soporte de interfaz para conectar sensores que se conectan directamente a

43
la mota. Estas motas son capaces de medir la presión barométrica, la
aceleración / actividad sísmica, etc. Los posibles usos de las motas de mica se
encuentran en la monitorización de la presión, la monitorización de la salud
estructural, etc. Las motas se alimentan de una batería externa de 2 AA con un
rango operativo de 2.1 a 3.6 V CC (Prasadh, Veedu, y Veedu, 2016).
Es un dispositivo sensor especialmente pensado para operar como estación
recolectora en redes de sensores, cuenta con una interface Serial/USB que
permiten conectarse a un PC tradicional y funcionar como Gateway, además
cuenta con un MIB600 que le permite conectarse a redes basada TCP/IP con
ethernet (Coronado, 2016).
Según lo indicado por los autores MicaZ motes es una tecnología de la
empresa Según los autores Crossbow, está equipada con un transceptor RF
Chipcon CC240 compatible con IEEE 802.15.4 que ofrece seguridad de alta
velocidad (250 kbps) y de hardware (AES-128). El Micaz mote se equipa con
placas de sensores que pueden contener varios dispositivos y puede ser
conectada a una computadora portátil que actúa como el centro de fusión de la
red. La placa del procesador utilizada es MPR2400. El conector de expansión de
51 pines admite entradas analógicas, E / S digitales, I2C, SPI e interfaces UART.
Admite comunicación de línea de visión de alcance exterior de 75-100 metros
(antena dipolo de 1/2 onda).
3.2.1.1 Transceptor de radio MICAz CC2420
La familia MICAz usa el Chipcon CC2420 que es un transmisor-receptor que
cumple la norma IEEE 802.15.4 y tiene un transmisor de radio frecuencia
Zigbee y un microcontrolador Atmega 128L (Narvaez, 2013).

44
La potencia de radio a bordo del mote es ajustable dentro de un rango de 0 a
−25 dBm, las asignaciones de potencia máxima y mínima, respectivamente. El
transceptor de radio MICAz CC2420 utiliza el protocolo IEEE 802.15.4 y
transmite datos en la banda de frecuencia de 2,4 GHz con una velocidad de
datos máxima de 250 kbits / s (Davis, Liang, & Navarro, 2012).
De acuerdo a lo expresado por los autores la radio IEEE 802.15.4 de MICAz -
MPR2400 es compatible con ZigBee y se basa en Atmel ATmega128L. La radio
de espectro extendido de secuencia directa proporciona resistencia a la
interferencia de RF y seguridad de datos.
3.2.1.2 Gateways Stargate
Stargate está basado en el procesador Intel XScale Intel PXA255 con una
velocidad de operación de 400MHz. El diseño completo, desarrollado por
esfuerzos conjuntos de varios grupos de investigación, ha sido licenciado por
Crossbow Technologies para su producción comercial. Funciona en la
plataforma Embedded Linux. Tiene varias opciones de conexión, como la serie
RS232, 10/100 Ethernet, host USB y JTAG. Es compatible con la familia de
productos WSN de Crossbow MICA2 / MICAz. Por lo tanto, se puede utilizar
como una puerta de enlace de WSN a Internet existente (Desai, Jain, &
Merchant, 2014).
3.2.1.3 TinyOS
TinyOS necesita ser fácilmente adaptable y extensible a diferentes plataformas
y componentes de hardware para mantener su papel en la investigación y
desarrollo de WSN. Con este fin, se ha incorporado una arquitectura de
abstracción de hardware flexible en TinyOS para simplificar la adaptación del
sistema operativo a diferentes plataformas. Para proporcionar interfaces

45
independientes de la plataforma, la abstracción de hardware de TinyOS está
diseñada como una arquitectura de tres capas con componentes de alto nivel,
al tiempo que mantiene la libertad de acceder a la asignación de bajo nivel de
las características de hardware (Lo & Yang, 2014).
TinyOS proporciona una capa de red básica a través de la interfaz
ActiveMessageC que permite comunicación broadcast y unicast y
acknowledgments; la comunicación multi-hop es provista por dos protocolos de
ruteo:
Collection Tree Protocol (CTP) o protocolo de árbol de recolección.
Source Routing Protocol (SRP) o ruteo en el origen (Marelli, 2015).
Las tres capas que conforman la arquitectura de TinyOS son:
• Capa de presentación de hardware (HPL)
La capa de adaptación proporciona abstracciones en las interfaces sin formato
proporcionadas por la capa HPL y exporta interfaces específicas del dominio,
como los canales ADC y las páginas EEPROM (Pieruccioni, Sinescalchi, &
Vanzini, 2015).
• Capa de adaptación de hardware (HAL)
HAL mantiene una topología en tiempo real de la red de almacenamiento e
interactúa directamente con los conmutadores y las matrices de
almacenamiento para controlar el acceso a los recursos de almacenamiento
(Chsosunal, 2016).
• Capa de interfaz de hardware (HIL)
Es el nivel más alto de abstracción y proporciona componentes independientes
del hardware. La complejidad de estos componentes depende directamente de
las capacidades del hardware subyacente; esto es: puede requerirse

46
implementar en software funcionalidades que el hardware no provee con el fin
de presentar una interfaz uniforme. Los componentes de esta capa pueden
verse como adaptadores de los componentes de la capa HAL (Marelli, 2015).
De acuerdo a lo expresado por los autores la capa de presentación de
hardware es la más baja, permite el acceso al dispositivo mediante la concesión
de memoria; reenviando las interrupciones a las capas superiores. La capa de
adaptación de hardware suministra distracciones en las interfaces que no tienen
formato que son reenviadas por la capa anterior, además exporta las interfaces
específicas como son los canales ADC y las páginas EEPROM. En cuanto a la
capa de interfaz es la que realiza la conexión de las interfaces específicas
suministradas por la capa de adaptación con las independientes de la plataforma
para ser aplicadas en multiplataforma.
3.2.2 Consumo de energía
Uno de los principales determinantes del funcionamiento confiable de la red es
la vida útil del nodo. Conservar la energía y el voltaje de la batería de un nodo
tanto como sea posible es importante para muchas aplicaciones de detección,
ya que las variaciones en el nivel de voltaje de la fuente de alimentación
pueden afectar directamente la salida del sensor (Baghaee, Gurbuz, & Oysal,
2013).
La potencia de transmisión de RF se establece en −25 dBm, que tiene un
consumo de corriente mínimo de 8,5 mA. Después de transmitir los datos, el
transceptor se cambia al modo de ahorro de energía - en espera (Chamanian, y
otros, 2014).
TinyOS define dos clases de dispositivos en lo que respecta a la administración
del consumo de energía: periféricos y microcontroladores. La diferencia radica

47
en que los microcontroladores suelen tener múltiples estados de energía
mientras que los periféricos solo tienen dos estados: encendido (on) y apagado
(off). En el caso de los periféricos, TinyOS implementa dos modelos de
administración del consumo de energía: explícito e implícito. El modelo explicito
entiende que un único cliente se encarga de la administración del consumo de
energía de un determinado dispositivo. Para este modelo de administración de
la energía se utilizan las interfaces: StdControl, SplitControl, y AsyncStdControl.
Por el contrario, en el modelo implícito el estado de energía es controlado por
el mismo dispositivo de acuerdo a una política interna que define cuando debe
cambiarse el estado de energía. En el caso de los microcontroladores, cuando
la cola de tareas del scheduler está vacía y todos los threads terminaron o
están esperando en primitivas de sincronización o bloqueados en operaciones
de entrada/salida, TinyOS pone al microcontrolador en un estado de bajo
consumo de energía a la espera de que sea despertado por una interrupción.
Esto se realiza invocando la interfaz McuSleep (Marelli, 2015).
Según lo expuesto por los autores el consumo de energía en redes
inalámbricas de sensores es un problema fundamental en términos de
funcionalidad y vida útil de la red.
3.3 Comparación de las plataformas Tmote y Micaz en redes de sensores
inalámbricas
La principal diferencia entre las plataformas Tmote Sky y Micaz es el
microcontrolador, en el caso de Tmote utiliza un microprocesador MSP430 -
F1611, mientras que Micaz emplea el Atmel ATmega 128 (Lajara, 2014).
Las dos plataformas utilizadas en el análisis: Tmote Sky y MICAz se han vuelto
muy populares entre la comunidad de investigación debido a la gran
48
disponibilidad de software de código abierto desarrollado para ellos, la
adaptabilidad a diferentes escenarios y la facilidad de operación. Son los
motivos empleados con mayor frecuencia en la implementación de bancos de
pruebas y suelen ser las plataformas típicas utilizadas para la validación y
evaluación de nuevos protocolos. Además tienen una amplia aceptación en
foros académicos y de investigación (Lajara, Pelegrí, & Pérez, 2012).
La plataforma Tmote Sky también se conoce como Telosb. Esta dualidad de
nombres proviene del hecho de que dos compañías, Moteiv Corporation y
Crossbow, compartieron el mismo diseño y suministraron la misma mota con
diferentes nombres.
En esta sección se realizó la comparación de las plataformas Tmote y Micaz en
relación a los parámetros generales, procesador y memoria, capacidades de
comunicación y soporte de sensores.
Ambas motas presentan una arquitectura muy similar basada en un
microcontrolador junto con un transceptor inalámbrico y algunos sensores para
medir variables físicas. La principal diferencia entre ellos es el microcontrolador,
ya que el Tmote Sky utiliza el Texas Instruments MSP430F1611 y MICAz
depende del Atmel Atmega128, pero ambos incluyen el mismo transceptor
inalámbrico: el CC2420 de Texas Instruments.
En la tabla 2 se evidencian las características principales de Tmote y MicaZ y
en la tabla 3 se realiza la comparación de los sistemas de comunicaciones entre
ambas plataformas. Una presentación detallada de estas características se
proporciona a continuación.
Los componentes principales de la plataforma Tmote son el microcontrolador
MSP430F1611 de Texas Instruments y el transceptor inalámbrico CC2420 de

49
Texas Instruments. El MSP430F1611 es un microcontrolador de ultra baja
potencia que cuenta con 10 kB de RAM y 48 kB de memoria de programa (flash).
Es un procesador de 16 bits con varios modos de apagado y una corriente de
reposo extremadamente baja. El MSP430 tiene un oscilador controlado
digitalmente (DCO) que implementa un reloj interno de 8 MHz. El microcontrolador
puede despertarse del modo de suspensión en solo 6 μs, lo que permite un
tiempo de reacción corto después de la activación de algún evento. El MSP430
tiene ocho canales ADC de 12 bits, de los cuales seis son accesibles en el
conector de expansión Tmote. La entrada de ADC varía de 0 a 3.0 V y la
frecuencia de muestreo máxima es de 200 kHz.
Hay otros periféricos disponibles, que incluyen interfaces de periféricos en serie
(SPI), receptores / transmisores asíncronos universales (UART), temporizadores
con funciones de captura y comparación, módulo convertidor digital a analógico
(DAC) de 2 puertos y 12 bits, un supervisor de voltaje de suministro y un
controlador de acceso directo a memoria de 3 puertos (DMA). Por otro lado, el
transceptor de radio CC2420 implementa la comunicación inalámbrica estándar
IEEE802.15.4. Ofrece comunicaciones inalámbricas confiables y capacidades de
administración de energía con un consumo de energía muy bajo. CC2420 está
conectado al microcontrolador TI MSP430 a través del puerto SPI. Otros
componentes periféricos integrados en la plataforma Tmote son: la conexión USB
implementada utilizando el transceptor FTDI, una memoria flash de 1 Mbyte de
capacidad y el sensor digital de temperatura y humedad SHT15 de Sensirion.
La principal diferencia de la plataforma MICAz, suministrada por Crossbow, con
respecto a la plataforma Tmote es el microcontrolador. El Atmega128 de Atmel se
basa en una arquitectura RISC avanzada con instrucciones de 8 bits que se

50
ejecutan en un solo ciclo de reloj. El ATmega128 proporciona 128 kbytes de
Flash, 4 kbytes de EEPROM, 4 kbytes de SRAM, 53 E / S de propósito general,
cuatro temporizadores / contadores flexibles con modos de comparación y PWM,
dos USART, una interfaz serial de dos cables orientada a bytes, un 10 ADC de 8
bits con 8 canales, un puerto serie SPI y un oscilador RC interno calibrado.
Conjuntamente con la placa principal de la mota, Crossbow vende placas de
sensores que se pueden conectar al conector de expansión MICAz, que incluye
una gran variedad de sensores como: luz, temperatura, presión barométrica,
aceleración / sísmica, acústica, magnética, etc.
En la tabla 5 se presentan las principales características del transceptor
CC2420 que es el común denominador entre ambas plataformas con un poder de
transmisión de 0 hasta -25 dBm y una sensibilidad de -95 dBm. Además tiene un
tiempo de inicio de 1 ms y un alcance de más de 120 m en exteriores con 0 dBm.
Las plataformas Tmote y MICAz se han vuelto muy populares entre la
comunidad de investigación debido a la gran disponibilidad de software de código
abierto desarrollado para ellos, la adaptabilidad a diferentes escenarios y la
facilidad de operación, por lo que son empleados con mayor frecuencia en la
implementación de bancos de pruebas y suelen ser las plataformas típicas
utilizadas para la validación y evaluación de nuevos protocolos. Ambas motas
presentan una arquitectura muy similar basada en un microcontrolador junto con
un transceptor inalámbrico y algunos sensores para medir variables físicas. La
principal diferencia entre ellos es el microcontrolador, ya que el Tmote usa el
Texas Instruments MSP430F1611 y MICAz utiliza Atmel Atmega128, pero ambos
incluyen el mismo transceptor inalámbrico: el CC2420 de Texas Instruments.

51
La elección de la plataforma Tmote frente a otras radica en que está
especialmente diseñado para la experimentación y la investigación debido a su
interfaz USB, que facilita la recopilación de datos a través de un bus conectado a
un PC y al uso del sistema operativo TinyOS de libre distribución y diseñado para
ser utilizado en dispositivos de bajo coste. Además de que es uno de los
dispositivos que poseen un menor consumo dentro de la gran cantidad de nodos
sensores existentes. Además tiene sensores integrados de humedad, temperatura
y luz.
No obstante Micaz conjuntamente con la placa principal puede utilizar placas
de sensores que se pueden conectar al conector de expansión MICAz, que
incluye una gran variedad de sensores como: luz, temperatura, presión
barométrica, aceleración / sísmica, acústica, magnética, entre otros.

52
4. Conclusiones
En base a lo expuesto en el presente trabajo monográfico se concluye lo
siguiente:
El transceptor Chipcon CC2420 interactúa directamente con TinyOS, lo que
permite que la plataforma Tmote abstraiga los algoritmos de red del programador.
Simplemente especificar un identificador de nodo de destino en el programa NesC
permite a TinyOS enrutar paquetes de forma transparente al nodo correcto,
independientemente de su ubicación en la red de malla. Entre el código TinyOS y
el transceptor Chipcon, los paquetes enviados y recibidos por las unidades Tmote
parecen similares a los paquetes de cualquier red. Esto incluye el formato básico
de MAC, preámbulo y datos seguidos de un paquete de reconocimiento. Este
método de transmisión es típico de la mayoría de las redes, inalámbricas o de otro
tipo, y habla de la confiabilidad de las capacidades de red inalámbrica de Tmote
Sky. La atracción principal de las redes en malla es que permite redes ad-hoc con
un número arbitrariamente grande de nodos. Sobre todo, los sistemas embebidos
en red de malla están diseñados para funcionar en entornos donde se requiere
una comunicación confiable, escalable y adaptable de bajo ancho de banda.
La plataforma de desarrollo MICAz, MOTE-KIT2400, es un kit completo de 8
nodos para el desarrollo comercial de Mote. Cuenta con el nuevo procesador /
placa de radio MICAz (MPR2400CA) de Crossbow. Diseñado específicamente
para redes de sensores profundamente integrados, el MICAz es un módulo Mote
de 2.4 GHz, compatible con IEEE 802.15.4 que se utiliza para habilitar redes de
sensores inalámbricos de baja potencia. El MICAz ofrece una alta velocidad de
datos de 250 kbps y utiliza una radio de espectro extendido de secuencia directa
que es resistente a la interferencia de RF y proporciona seguridad de datos

53
inherente. El MICAz ejecuta TinyOS 1.1.7 y superior y es compatible con el
software de red de malla confiable de Crossbow. El kit de la serie 2400 tiene
todos los componentes necesarios para desarrollar, probar e implementar una red
de sensores inalámbricos.
Ambas motas presentan una arquitectura muy similar basada en un
microcontrolador junto con un transceptor inalámbrico y algunos sensores para
medir variables físicas. La principal diferencia entre ellos es el microcontrolador,
ya que el Tmote Sky utiliza el Texas Instruments MSP430F1611 y MICAz
depende del Atmel Atmega128, pero ambos incluyen el mismo transceptor
inalámbrico: el CC2420 de Texas Instruments. Micaz es un dispositivo sensor
utilizado especialmente para operar como estación recolectora en redes de
sensores, cuenta con una interface Serial/USB que permiten conectarse a un PC
tradicional y funcionar como Gateway, además cuenta con un MIB600 que le
permite conectarse a redes basada TCP/IP con Ethernet. Tmote es un dispositivo
muy popular en el tema de redes de sensores, el dispositivo cuanta con muchas
opciones de configuración debido a que está equipado con sensores, interfaces
de interconexión USB, líneas de expansión para instalarle antenas externas y
múltiples opciones de alimentación. Además, su bajo costo hace de este
dispositivo muy atractivo para iniciar proyectos en internet de las cosas.

54
5. Recomendaciones
De acuerdo con el análisis realizado en el trabajo de investigación se realizan
las siguientes recomendaciones:
El hardware debe tener la capacidad de trabajar con voltajes muy pequeños y
un consumo de energía muy pequeño, para reducir el tamaño de las baterías y
prolongar su vida útil.
Los usuarios deben evaluar el costo de desarrollo de la aplicación para
seleccionar la plataforma de hardware más adecuada, considerando que existen
muchas plataformas de hardware diferentes para desarrollar una aplicación WSN.
Optimizar el consumo de energía porque WSN es un campo en el que es muy
importante maximizar la vida útil de la red.

55
6. Bibliografía
Aguilera, C. (2019). Simulación de una red de sensores inalámbricos con
topología Multi-Hop, para el estudio de la propagación y distribución de la
señal a través del algoritmo de Dijkstra,´utilizando un software Maltab.
Guayaquil, Ecuador: Universidad Politécnica Salesiana.
Asamblea Constituyente. (2018). Constitución del Ecuaador. Registro oficial No.
449 Reforma. Quito, Ecuador.
Asamblea Nacional República del Ecuador. (2015). Ley orgánica de
telecomunicaciones. Obtenido de Año II No. 439 Tercer suplemento:
https://www.telecomunicaciones.gob.ec/wp-
content/uploads/downloads/2016/05/Ley-Org%C3%A1nica-de-
Telecomunicaciones.pdf
Baghaee, S., Gurbuz, S., & Oysal, E. (2013). Aplicación y modelado de un WSN
magnético para localización de objetivo. 15° Conferencia Internacional
sobre modelado y simulación de computadoras del Reino Unido (págs.
687-692). Cambridge: IEEE.
Barrett, S., & Pack, D. (2011). Microcontrolador MSP430. En Microcontroller
Programming and interfacing: Texas instruments MSP 430 (págs. 26-28).
USA: Morgan & Claypool.
Bichoff, R., Meyer, J., & Feltrin, G. (2014). Plataformas de red de sensores
inalámbricos. En C. Boller, F. Chang, & Y. Fujino, Enciclopedia de
monitoreo de salud estructural en línea (págs. 1-10). New York, USA: John
Wiley & Sons ltd.
Bucafusco, F. (2016). MSP 430. Porting de FreeOSEK a la plataforma MSP430, 7.
Buenos Aires, Argentina: Universidad de Buenos Aires.
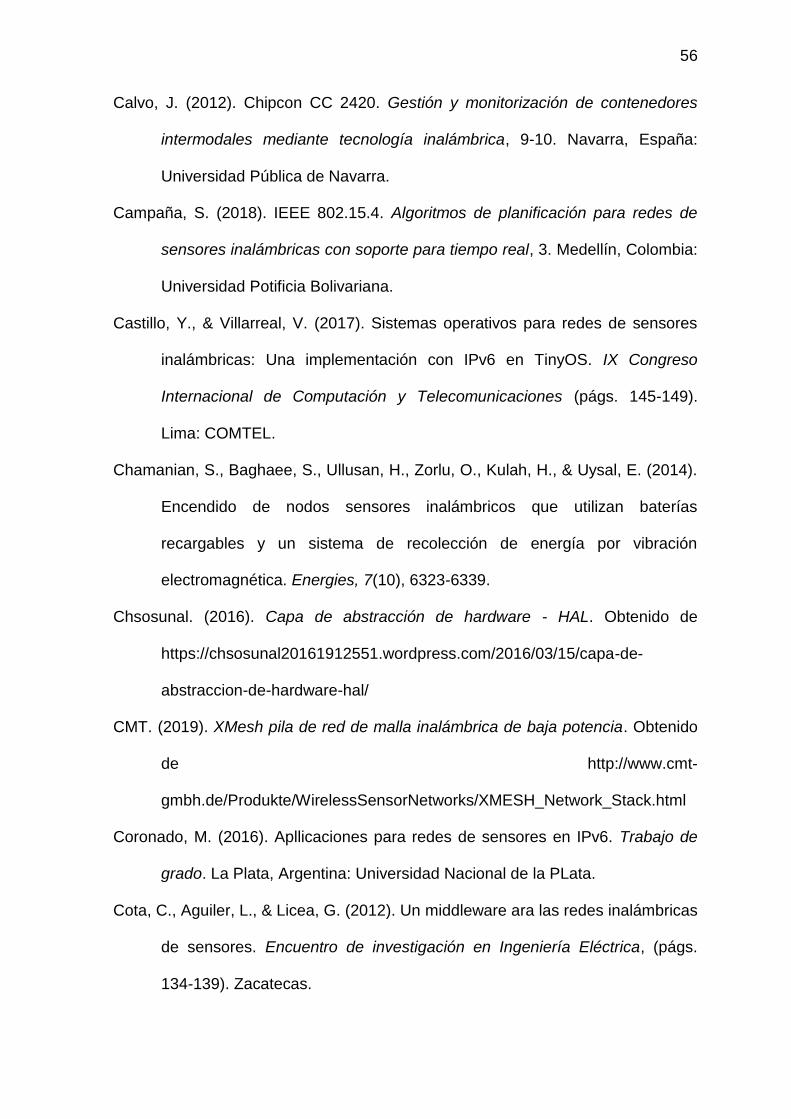
56
Calvo, J. (2012). Chipcon CC 2420. Gestión y monitorización de contenedores
intermodales mediante tecnología inalámbrica, 9-10. Navarra, España:
Universidad Pública de Navarra.
Campaña, S. (2018). IEEE 802.15.4. Algoritmos de planificación para redes de
sensores inalámbricas con soporte para tiempo real, 3. Medellín, Colombia:
Universidad Potificia Bolivariana.
Castillo, Y., & Villarreal, V. (2017). Sistemas operativos para redes de sensores
inalámbricas: Una implementación con IPv6 en TinyOS. IX Congreso
Internacional de Computación y Telecomunicaciones (págs. 145-149).
Lima: COMTEL.
Chamanian, S., Baghaee, S., Ullusan, H., Zorlu, O., Kulah, H., & Uysal, E. (2014).
Encendido de nodos sensores inalámbricos que utilizan baterías
recargables y un sistema de recolección de energía por vibración
electromagnética. Energies, 7(10), 6323-6339.
Chsosunal. (2016). Capa de abstracción de hardware - HAL. Obtenido de
https://chsosunal20161912551.wordpress.com/2016/03/15/capa-de-
abstraccion-de-hardware-hal/
CMT. (2019). XMesh pila de red de malla inalámbrica de baja potencia. Obtenido
de http://www.cmt-
gmbh.de/Produkte/WirelessSensorNetworks/XMESH_Network_Stack.html
Coronado, M. (2016). Apllicaciones para redes de sensores en IPv6. Trabajo de
grado. La Plata, Argentina: Universidad Nacional de la PLata.
Cota, C., Aguiler, L., & Licea, G. (2012). Un middleware ara las redes inalámbricas
de sensores. Encuentro de investigación en Ingeniería Eléctrica, (págs.
134-139). Zacatecas.

57
Crosbow. (2020). Manual del usuario de la placa del sensor MTS/MDA. Obtenido
de xbow: http://www.xbow.com
Crossbow. (2018). Plataforma de software MoteWork. Obtenido de
https://www.willow.co.uk/MoteWorks_OEM_Edition.pdf
Cunha, A., Kuoba, A., Severino, R., & Alves, M. (2012). Protocolo de red TinyOS.
Open ZB: Una implementación de código abierto de la pila de protocolos
IEEE 802.15.4 / ZigBee en TinyOS, 5. Oporto, Portugal: Instituto Superior
Engenharia do Porto.
Cunha, A., Severino, R., Pereira, N., & Alves, M. (2014). Pila de protocolo de red.
ZigBee sobre TinyOS: Implementación y desafío experimental, 12. Oporto,
Portugal: Instituto Superior de Engenharia do Porto.
Davies, J. (2015). Microcontrolador MSP430. En Conceptos básicos del
microcontrolador MSP430 (págs. 45-50). USA: Elsevier.
Davis, T., Liang, X., & Navarro, M. (2012). Un estudio experimental de la eficiencia
energética de WSN: redes MicaZ con XMesh. Revista Internacional de
Redes de Sensores distribuidos, 4-14.
Desai, U., Jain, B., & Merchant, S. (2014). Gaterway. Sensor de redes
inalámbricas: Hoja de ruta tecnológica, 18. India: Ministerio de Tecnología
de la Información y la Comunicación.
Díaz, F. (2015). Control de operación de microcontrolador MSP 430. En MSP430
Microcontroller basics (págs. 45-50). USA: Elsevier.
Díaz, F. (2017). Microcontrolador MSp 430. Diseño y realización de un sistema de
procesamiento de audio con control inalámbrico, 31-34. Sevilla, España:
Universidad de Sevilla.

58
Ecured. (2016). Red inalámbrica de sensores. Obtenido de
https://www.ecured.cu/Red_inhal%C3%A1mbrica_de_sensores
Forstner, P. (2015). Características de la memoria flash de microcontrolador
MSP430. Texas Instruments, 2-4.
García, I., Mora, M., & García, G. (2018). Sistema de seguridad usando la
tecnología WSN (Wireless Sensor Network) para mejorar la seguridad de
un equipo de radio base. Octava Conferencia Iberoamericana de
Complejidad, informática y cibernética (págs. 103-107). Florida: Spring.
Hernández, G. (2018). Topología de Malla TinyOS. Estudio exploratorio de dos
redes inalámbricas de sensores, 15-42. Chihuahua, México: Universidad
Autónoma de Chihuahua.
Hurni, P. (2012). Memoria de código Microcontrolador MSP 430. Control de
acceso y sincronización de energía eficiente no sincronizados en redes
inalámbricas de sensores, 32-33. Berna, Alemania: Universidad de Berna.
Lajara, J. (2014). Modelado y optimización de energía en redes de sensores
inalámbricas para la medida de parámetros medioambientales. Tesis
doctoral. Valencia, España: Universidad Politécnica de Valencia.
Lo, B., & Yang, G. (2014). Plataformas de desarrollo de sensores inalámbricos. En
G. Yang, Redes de sensores corporales (págs. 460-461). España:
Springer.
Marelli, R. (2015). DEVS-TOSSIM: Un framework DEVS para simular redes de
sensores inalámbricas que utilizan el sistema operativo TinyOS. 32-35.
Buenos Aires, Argentina: Universidad de Buenos Aires.

59
Narvaez, R. (2013). Transceptor Chipcon CC2420. Diseño de un prototipo
inalámbrico para ajustar la posición de los dendómetros de una explotación
agronómica. Cartagena, Colombia: Universidad Politécnica de Cartagena.
Peña, M. (2011). Redes para TinyOS. DIseño e implementación de una red de
sensores inalámbrica para el monitoreo de temperatura y humedad durante
el cultivo del champiñón, 52. Santiago de Cali, Colombia: Universidad
Autónoma de Occidente.
Pérez, D. (2012). Diseño e implementación de un prototipo de videoportero
basado en redes inalámbricas de sensores. Tesis de grado, 26. Cartagena,
Colombia: Universidad Politécnica de Cartagena.
Pieruccioni, A., Sinescalchi, M., & Vanzini, F. (2015). TinyOS. WakeupRx receptor
de despertado para sensores inalámbricos, 11. Montevideo, Uruguay:
Universidad de la República.
Prasadh, R., Veedu, T., & Veedu, V. (2016). Encuesta sobre motas utilizadas en
redes inalámbricas de sensores: rendimiento y análisis paramétrico.
Wireless Sensor Network, 8, 51-60.
Saenz, E. (2013). Chipcon CC2420. Sistema de autofoco en cámaras de
video/foto mediante sensores inalámbricos. Lejona, España: Universidad
del pais Vasco.
Sanmartín, K., & Álvarez, K. (2018). Diseño e implementación de una red con
sensores inalámbricos (WSN) con un protocolo abierto de comunicación
basado en IE 802.15.4 (XBEE) para práctica universitaria. Tesis de
pregrado. Guayaquil, Ecuador: Universidad Politécnica Salesiana.
Tandazo, M. (2015). TinyOs. Estudio de un sistema de seguridad usando la
tecnología WSN (Wireless sensor Networks) para mejorar la seguridad de

60
los equipos radio base de la empresa Comunicate de la ciudad de Daule en
la provincia del Guayas, 13. Guayaquil, Ecuador: Universidad de
Guayaquil.
Tarifa, J. (2011). Chipcon CC 2420. Red de sensores inalámbricos para
monitorización de instalaciones eléctricas de baja tensión, 31. Sevilla,
España: Universidad de Sevilla.
Tarifa, J., & Escaño, J. (2014). Red de sensores inalámbricos para la
monitorización de instalaciones de baja tensión. XXXII Jornadas de
automática (págs. 5-13). Sevilla: CEA-IFAC.
Texas Instruments. (2016). Arquitectura Risc del Microcontrolador MSP430. En
MSP430 MIcrocontroller (pág. 8). USA.
Tinyos.net. (2020). TinyOS. Obtenido de http://www.tinyos.net
Torrejón, C. (2016). MonDo sensores: Plataforma móvil para el control de una red
de sensores inalámbricos en un entorno domótico. Trabajo de grado.
Madrid, España: Universidad Politécnica de Madrid.

61
7. Glosario
ACM Association for Computing Machinery: Asociación ACM para Maquinaria
de Computación - sociedad global de computación educativa y científica.
Ad Hoc: Una solución diseñada para un problema o tarea específica, no
generalizable.
ADC Analog-to-Digital Converter: Convertidor analógico a digital, es un módulo
de hardware que convierte la señal de entrada analógica en señal de salida
digital.
CPU: Hardware dentro de un sistema informático que lleva a cabo las
instrucciones de un programa informático realizando las operaciones aritméticas,
lógicas y de entrada / salida básicas del sistema.
CSMA Carrier Sense Multiple Access: Un enfoque probabilístico de control de
acceso a medios donde cada nodo verifica la ausencia de otro tráfico antes de
transmitir sus propios datos a través de un medio de comunicación compartido.
IEEE: Instituto de ingenieros eléctricos y electrónicos.
IEEE 802.15.4: Es un estándar que define el nivel físico y el control de acceso al
medio de redes inalámbricas de área personal con tasas bajas de transmisión de
datos.
Interfaz de programación de aplicaciones - API: una biblioteca de software que
incluye especificaciones para estructuras de datos y rutinas utilizadas para
interactuar con un sistema de software.
MAC Medium Access Control: Control de acceso medio, una capa en la pila de
protocolos de red que proporciona una distribución eficiente del medio de
transmisión entre múltiples nodos de red que usan el medio.

62
Microcontrolador: Circuito integrado programable, capaz de ejecutar las órdenes
grabadas en su memoria.
Mote: nodo sensor inalámbrico (plataforma de hardware).
PAN: Wireless Personal Área Networks o red inalámbrica de área Personal o Red
de área personal o Personal área network es una red de computadoras para la
comunicación entre distintos dispositivos cercanos a un punto de acceso.
Radio base: Estación base es una instalación fija o moderada de radio para la
comunicación media, baja o alta bidireccional.
Ram: Random Access Memory (Memoria de Acceso Aleatorio). Se trata de la
memoria que, en un equipo informático, es utilizada por un procesador para recibir
instrucciones y guardar los resultados.
ZIGBEE: Es el nombre de la especificación de un conjunto de protocolos de alto
nivel de comunicación inalámbrica para su utilización con radiodifusión digital de
bajo consumo, basada en el estándar IEEE 802.15.4 de redes inalámbricas.

63
8. Anexos
Tabla 1. Especificaciones técnicas de la plataforma Tmote
Item Especificación Descripción
Procesador Procesador Texas Instruments MSP430F1611
Memoria 48 KB Flash
10 KB RAM
1 MB Flash externo ST M25P80
ADC 12 bit resolución
8 canales
Interfaces Serial interfaces: UART, SPI, I2C
Sistema Externo (FTI FT1232BM) USB
Radio RF Chip Chipcon CC2420
IEEE 802.15.4
2.4 GHz Wireless Module
Frecuencia de banda 2.4 GHz IEEE 802.15.4
Sensibilidad 95dBm typ - Recibir sensibilidad
Ratio de transferencia 250Kbps - IEEE 802.15.4 compliant
Potencia de RF 25dBm - 0dBm Software configurable
Rango 120 m (outdoor), 20-30 m (indoor)
Rangos más largos posibles con antena SMA opcional conectada
Consumo de corriente RX: 18.8mA TX: 17.4mA Sleep mode: 1uA
Los modos de potencia de RF más bajos reducen el consumo
Fuente de alimentación de RF
2.1V - 3.6V
CC2420 Input Power
Antena Antena dipolo / Antena PCB
Conector SMA adicional disponible para antena adicional
Sensores Light 1 Hamamatsu S1087 Series. Rango visible
Onda de sensibilidad máxima de 560 nm
Light 2 Hamamatsu S1087 Series. Rango visible
Onda de sensibilidad máxima de 960 nm
Temperatura y humedad
Sensirion SHT11
Características electrónicas
Dimensiones 81-90mm x 32.50mm x 6.55 mm Incluyendo conector USB
Peso 17,7 g sin pilas
Power 3V (soporte de batería 2xAA incluido)
Micrel MIC5207 Regulador de potencia
Se describen las especificaciones técnicas de la plataforma Tmote
(Bravo, 2020)

64
Tabla 2. Especificaciones técnicas de la plataforma MicaZ
Características Crossbow MICAz
Microcontrolador Atmel Atmega 128 L
Arquitectura Risc 8 bits
Voltaje alimentación 2,1 - 3,6
Baterías 2xAA
Consumo Power down 5 μA
Memoria RAM 4 KB
Memoria Flash 128 KB
Memoria externa 512 KB
EEPROM 4 KB
Comunicaciones / serie UART
Conversor analógico digital - ADC 10 b
A/D 10 bits - 8 canales
Interfaz Digital I/O 12 C / SPI
Consumo de corriente en modo sleep - MCU
15 μA
Rango de temperaturas - 40 a 85 °C
Sistema operativo integrado TinyOS
Dimensiones 58 x 32 mm
Peso 18 g
Banda de frecuencias 2400 - 2483.5 MHz
Potencia de transmisión -24 a 0 dBm
Potencia de transmisión 0.03 a 1 mW
Sensibilidad de recepción - dBm -90 (min) / -94 (nom)
Alcance en exterior 75 a 100 m
Alcance en interior 20 a 30 m
Consumo de corriente recibiendo 19.7 Rx mA
Consumo de corriente enviando 17.4 Rx mA
Consumo de corriente en reposo 20 μA
Transceptor CC2420
VCC 2.1 - 3.6 V
Poder de transmision 0, -5, -10, -15, -25 dBm
Sensibilidad -95 dBm
Tiempo de inicio 1 ms (oscilador xtal)
Rango de radio Más de 120 m en exteriores con 0 dBm
Se describen las especificaciones técnicas de la plataforma MicaZ
(Bravo, 2020)

65
Tabla 3. Comparación de las principales características de Tmote vs MicaZ
Características MotelV Tmote Sky Crossbow MICAz
Microcontrolador Texas MSP430 F17611 Atmel Atmega 128 L
Arquitectura Risc 16 bits Risc 8 bits
Voltaje alimentación 2,1 - 3,6 2,1 - 3,6
Baterías 2xAA 2xAA
Corriente instantánea Active 500 μA 1MHz, 3V
Consumo Standby 2.6 μA Power down 5 μA
Off 0.2 μA
Memoria RAM 10 KB 4 KB
Memoria Flash 48 KB 128 KB
Memoria externa 1024 KB 512 KB
EEPROM 16 KB 4 KB
Comunicaciones / serie JTAG, 2xUART, 2xSPI,
12C, 3xDMA JTAG, 2xUART, SPI, 12C
Conversor analógico digital - ADC 12 b 10 b
A/D 12 bits - 8 canales 10 bits - 8 canales
D / A 12 bits - 2 canales
Interfaz del usuario USB -
Interfaz Digital I/O 12 C / SPI 12 C / SPI
Consumo de corriente en modo sleep -
MCU 5.1 μA 15 μA
Rango de temperaturas - 40 a 85 °C - 40 a 85 °C
Sistema operativo integrado TinyOS TinyOS
Otros Sistemas operativos Contiki, MantisOS, Sos,
Retos
Contiki, Mantis OS, Sos,
Nano-RK
Dimensiones 66.04 x 32.766 mm 58 x 32 mm
Peso 23 g 18 g
Sensor
Sensores integrados a
bordo: humedad,
temperatura y luz.
Conector de expansión que
incluye E / S digital, entradas
analógicas, i2C, SPI y UART.
Hay paneles de expansión
disponibles con luz,
temperatura, HR, presión
barométrica, acelerómetros,
acústicos y magnéticos.
Se describen las principales características de Tmote y MicaZ
(Bravo, 2020)

66
Tabla 4. Comparación de los sistemas de comunicación de Tmote vs MicaZ
Características MotelV
Tmote Sky
Crossbow
MICAz
Banda de frecuencias 2400 - 2483.5 MHz 2400 - 2483.5 MHz
Potencia de transmisión -25 a 0 dBm -24 a 0 dBm
Potencia de transmisión 0.03 a 1 mW 0.03 a 1 mW
Sensibilidad de recepción - dBm -90 (min) / -94 (nom)
-90 (min) / -94
(nom)
Alcance en exterior 125 m 75 a 100 m
Alcance en interior 50 m 20 a 30 m
Consumo de corriente recibiendo 19.7 Rx mA 19.7 Rx mA
Consumo de corriente enviando 17.4 Rx mA 17.4 Rx mA
Consumo de corriente en reposo 20 μA 20 μA
Se describen los sistemas de comunicación de Tmote y MicaZ
(Bravo, 2020)
Tabla 5. Características del transceptor utilizado por Tmote y MicaZ
Transceptor CC2420
VCC 2.1 - 3.6 V
Poder de transmision 0, -5, -10, -15, -25 dBm
Sensibilidad -95 dBm
Consumo actual instantáneo RX 18.8 mA
TX 17.4 mA (0 dBm)
Sleep 426 μA
Power down 20 μA
off 0.02 μA
Tiempo de inicio 1 ms (oscilador xtal)
Rango de radio Más de 120 m en exteriores con 0 dBm
Se describe las características del transceptor CC2420 utilizado por Tmote y MicaZ
(Bravo, 2020)

67
Figura 1. Topología de red de malla preliminar
(Hernández, 2018)
Figura 2. Topología de red de malla que incluye información de enrutamiento
(Hernández, 2018)

68
Figura 3.Topología de red de malla con ruta de enrutamiento ideal resaltada
(Hernández, 2018)
Figura 4. Descripción general del sistema
(Marelli, 2015)
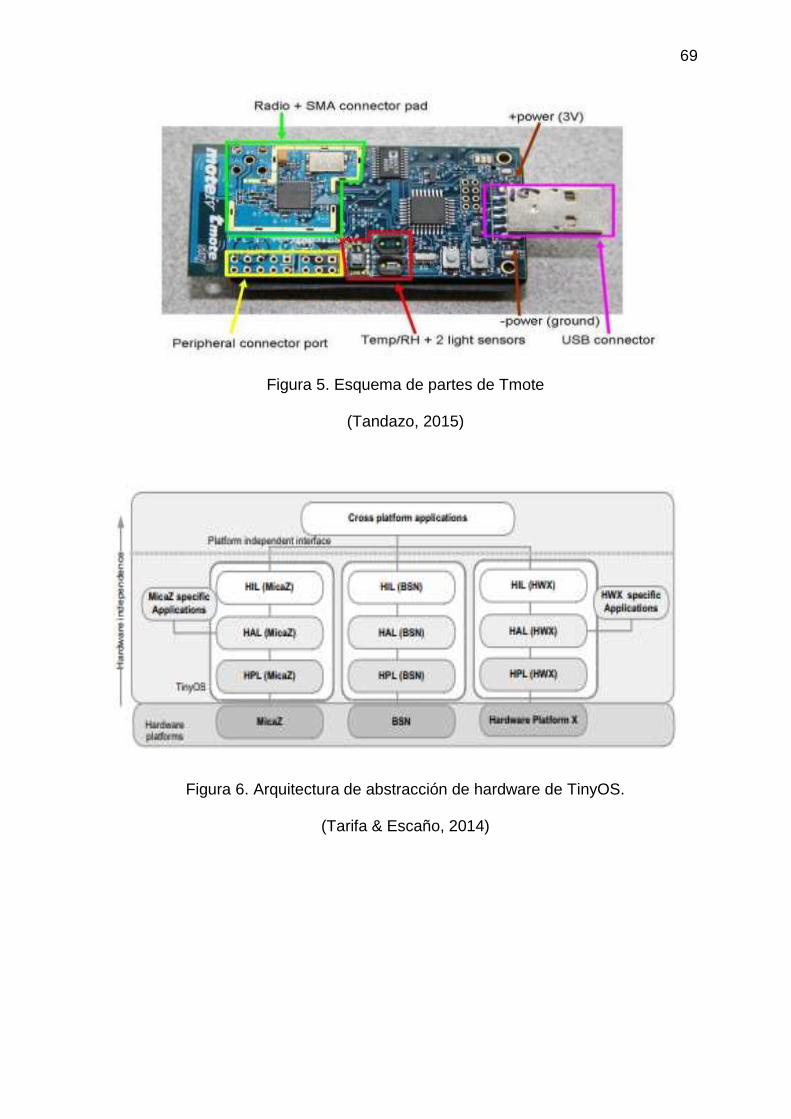
69
Figura 5. Esquema de partes de Tmote
(Tandazo, 2015)
Figura 6. Arquitectura de abstracción de hardware de TinyOS.
(Tarifa & Escaño, 2014)

70
Figura 7. Mote MicaZ
(Pérez, Urdaneta, & Custodio, 2014)
Figura 8. Mote Tmote
(Godoy, 2011)

71
Figura 9. Microcontrolador CC2420
(Texas Instruments, 2016)