appunti di - webalice.it terza.pdf · fisica appunti di ambientale per la classe terza dell...
TRANSCRIPT
1
Appunti di Fisica Ambientale
Per la classe terza dell’articolazione di Biotecnologie Ambientali degli Istituti Tecnici
Alessandro Ciucci [email protected]
Fisica tecnica Fisica dell’atmosfera Energia Eolica Onde Suono
2
Introduzione
Obiettivo di questi appunti è quello di fornire un supporto allo studio della Fisica Ambientale
cercando di partire dalle nozioni più elementari apprese nel biennio per approfondire alcuni
argomenti specifici e delineare, nel finale di ciascun modulo, gli obiettivi di competenza che il
ministero ha indicato. Tali obiettivi sono spesso ambiziosi perché (come ogni vera competenza)
richiedono l’integrazione dei contenuti specifici di più discipline e una conoscenza di alcuni
strumenti matematici che non è ancora sviluppata nella classe terza.
Per questo motivo le prime pagine sono dedicate ad un mini compendio di matematica che è
indispensabile per un trattamento degli argomenti tale da permettere l’avvicinamento alle
competenze in modo non semplicemente qualitativo. Si descrivono, quindi, le funzioni
goniometriche SENO, COSENO e TANGENTE, la funzione ESPONENZIALE crescente e decrescente, i
LOGARITMI.
Gli argomenti che vengono affrontati in questi appunti sono tre: la propagazione del calore, i
gas e la fisica dell’atmosfera, il suono e il rumore.
Ciascun argomento è affrontato con il duplice obiettivo di offrire un compendio di conoscenze
di fisica specifico del settore e fornire gli strumenti interpretativi di alcune problematiche
ambientali di rilievo. Se, quindi, in questi appunti si affronterà il corpo nero, lo si farà sia per poter
interpretare e comprendere l’effetto serra sia per affrontare i temi del risparmio energetico
nell’edilizia ad uso civile ed industriale.
3
Argomenti:
- Strumenti matematici
o Le funzioni goniometriche
o La funzione esponenziale
o I logaritmi
- Il Calore
o Temperatura e calore
o Scale termometriche
o Meccanismi di trasporto del calore
Conduzione
Convezione
Irraggiamento
o Analogia elettrica per la conduzione termica
Resistenza termica
Temperatura di contatto
o Equazione del calore
Derivazione e semplici risoluzioni
La costante tempo
o La grandezze per il risparmio energetico
La trasmittanza
- I gas
o Equazione di stato dei Gas perfetti
o Trasformazioni termodinamiche semplici
Isocora
Isobara
Isoterma
o Trasformazione adiabatica
o I Gas reali
Curve di Andrews
Equazione di Van der Waals
o Cicli termici con i gas reali
Funzionamento delle pompe di calore
- Approfondimenti di termodinamica
Entalpia
Entropia
Energia libera
- Fisica dell’atmosfera
o Formazione e stabilità dell’atmosfera terrestre
Gli involucri di aria
Misure dell’atmosfera
Gli strati inferiori dell’atmosfera
o Struttura e composizione dell’atmosfera terrestre
4
o Equilibrio di una colonna d’aria
o Variazione della pressione con la quota
o Variazione della temperatura con la quota
o Formazione del vento geostrofico
o Semplici modelli di diffusione in atmosfera
- Energia dal vento
o Generalità sui generatori eolici
o La legge di Betz
- Le onde
o Tipi di onde (trasversali, longitudinali, superficiali)
Caratteristiche delle onde (impulsi, treni, onde periodiche, ampiezza, ….)
o Velocità delle onde
o Energia delle onde armoniche
o Principio di sovrapposizione e battimenti
o Principio di Huygens
Diffrazione
Interferenza
Riflessione e rifrazione
- Il suono
o Velocità del suono
o Effetto Doppler
Sorgente in movimento
Osservatore in movimento
Misura della velocità mediante effetto doppler
o La pressione sonora e la scala dei dB
Intensità del suono
Potenza di una sorgente
o La percezione del suono
Le curve isofoniche
La scala dBA
- Il rumore
o
5
Funzioni goniometriche
Consideriamo un triangolo rettangolo come in figura:
Chiamiamo i cateti a e b, l’ipotenusa c. Chiamiamo l’angolo opposto
al cateto a.
Definiamo delle funzioni che dipendono solo dall’angolo
SEN() = a/c (si legge “seno di alpha”, sulla calcolatrice è il tasto “SIN”)
COS() = b/c (si legge “coseno di alpha”, sulla calcolatrice è il tasto “COS”)
TAN() = SEN()/COS() = a/b (si legge “tangente di alpha”, sulla calcolatrice è tasto “TAN”)
Il seno di un angolo è il rapporto tra il cateto che sta davanti all’angolo e l’ipotenusa, il coseno di
un angolo è il rapporto tra il cateto adiacente all’angolo e l’ipotenusa. La tangente di un angolo è il
rapporto tra il cateto opposto all’angolo e quello adiacente
Calcolare il seno e il coseno di un angolo è un operazione che non si può fare a mente, i calcoli
sono semplici solo in alcuni casi particolari, per questa ragione si ricorre alle calcolatrici tascabili
oppure alle applicazioni di calcolo per personal computer o telefono, in passato si usavano delle
tavole.
I valori del seno e del coseno un angolo sono sempre compresi tra -1 e +1. Di seguito si riporta
una tabella riassuntiva dei valori per i principali angoli compresi tra 0° e 180°
ANGOLO gradi
radianti SEN() esatto
SEN() approssimato
COS() esatto
COS() approssimato
TAN() TAN() approssimato
0° 0 0 0 1 1 0 0
30° /6 1/2 0.5 √3/2 0.866 √3/3 0.577
45° /4 √2/2 0.707 √2/2 0.707 1 1
60° /3 √3/2 0.866 1/2 0.5 √3 1.732
90° /2 1 1 0 0 non def.
120° /3 √3/2 0.866 -1/2 -0.5 −√3 -1.732
135° /4 √2/2 0.707 -√2/2 -0.707 -1 -1
150° /6 1/2 0.5 -√3/2 -0.866 -√3/3 -0.577
180° 0 0 -1 -1 0 0 (notiamo che la funzione SENO è crescente tra 0° e 90°, decrescente tra 90° e 180°, sempre positiva. La funzione
COSENO è sempre decrescente tra 0° e 180°, positiva tra 0° e 90°, negativa tra 90° e 180°. Vale per ogni angolo
l’identità goniometrica 𝑆𝐸𝑁2(𝛼) + 𝐶𝑂𝑆2(𝛼) = 1 )
Nella tabella gli angoli sono espressi nei gradi sessagesimali (i normali gradi ai quali siamo abituati)
e in radianti, quest’ultimo modo di esprime gli angoli è diffuso in ambiente scientifico, in radianti
l’angolo piatto vale (pi greco = 3.1459….). Le formule necessarie per fare la conversione da una
scala all’altra sono:
(angolo in gradi) = (angolo in radianti) ×180
𝜋
a
b
c
6
(angolo in radianti) = (angolo in gradi) ×𝜋
180
Per calcolare il valore delle funzioni SEN e COS (sulla calcolatrice sono SIN e COS) dobbiamo
verificare la modalità di espressione dell’angolo. Per usare i normali gradi è necessario che sul
display ci sia una scritta “DEG” o la semplice lettera “D”, per i radianti ci deve essere la scritta
“RAD” o la lettera “R”. C’è poi una terza modalità di esprimere gli angoli (angolo retto = 100) detta
“gradi centesimali”, in questo caso ci sarà la scritta “GRAD” o la lettera “G”. Per passare da una
modalità all’altra è necessario usare il tasto “DRG” (Deg – Rad – Grad).
L’utilizzo delle funzioni goniometriche in geometria permettere di “risolvere” un triangolo
rettangolo conoscendo un lato e un angolo (che non sia quello retto) piuttosto che due dei tre lati.
Sfruttando la definizione data all’inizio e potendo ricavare il valore delle funzioni SEN e COS con un
calcolatore o con le tabelle, è possibile determinare i cateti conoscendo l’ipotenusa:
a = c x SEN()
b = c x COS()
oppure l’ipotenusa conoscendo uno dei due cateti:
c = a / SEN()
c = b / COS()
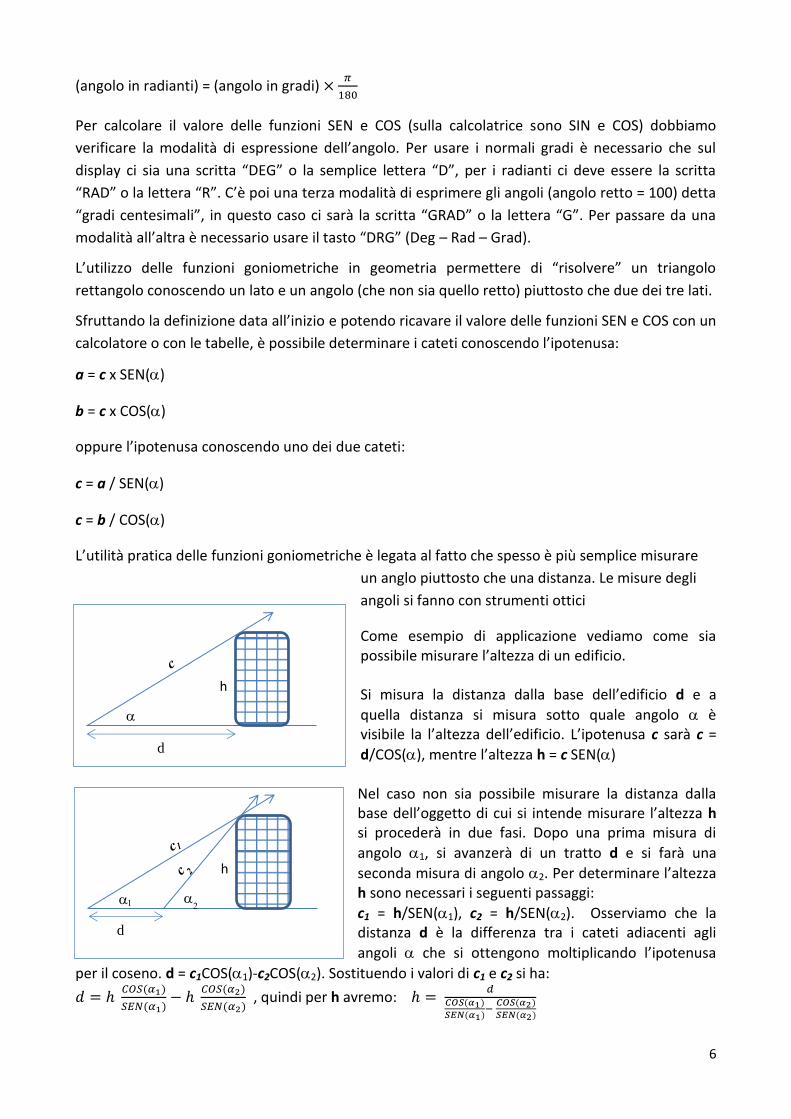
L’utilità pratica delle funzioni goniometriche è legata al fatto che spesso è più semplice misurare
un anglo piuttosto che una distanza. Le misure degli
angoli si fanno con strumenti ottici
Come esempio di applicazione vediamo come sia possibile misurare l’altezza di un edificio. Si misura la distanza dalla base dell’edificio d e a
quella distanza si misura sotto quale angolo è visibile la l’altezza dell’edificio. L’ipotenusa c sarà c =
d/COS(), mentre l’altezza h = c SEN() Nel caso non sia possibile misurare la distanza dalla base dell’oggetto di cui si intende misurare l’altezza h si procederà in due fasi. Dopo una prima misura di
angolo 1, si avanzerà di un tratto d e si farà una
seconda misura di angolo 2. Per determinare l’altezza h sono necessari i seguenti passaggi:
c1 = h/SEN(1), c2 = h/SEN(2). Osserviamo che la distanza d è la differenza tra i cateti adiacenti agli
angoli che si ottengono moltiplicando l’ipotenusa
per il coseno. d = c1COS(1)-c2COS(2). Sostituendo i valori di c1 e c2 si ha:
𝑑 = ℎ 𝐶𝑂𝑆(𝛼1)
𝑆𝐸𝑁(𝛼1)− ℎ
𝐶𝑂𝑆(𝛼2)
𝑆𝐸𝑁(𝛼2) , quindi per h avremo: ℎ =
𝑑𝐶𝑂𝑆(𝛼1)
𝑆𝐸𝑁(𝛼1)−
𝐶𝑂𝑆(𝛼2)
𝑆𝐸𝑁(𝛼2)
h
d
h
d
7
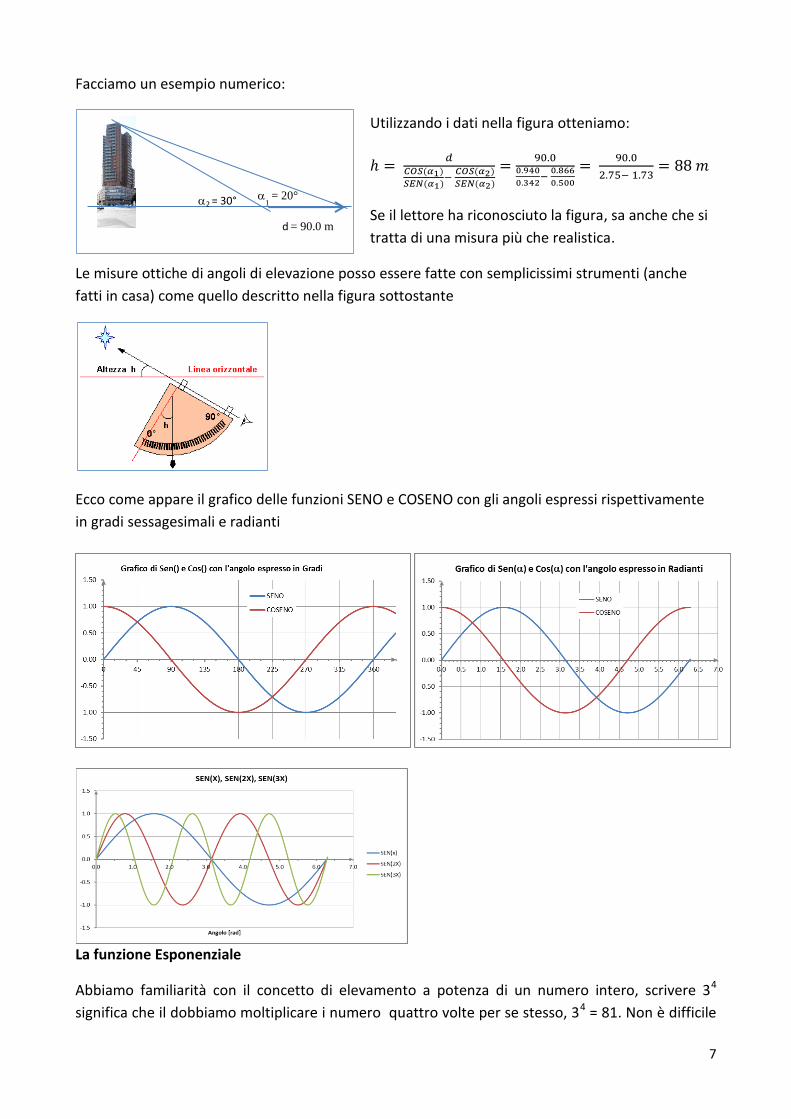
Facciamo un esempio numerico: Utilizzando i dati nella figura otteniamo:
ℎ = 𝑑
𝐶𝑂𝑆(𝛼1)
𝑆𝐸𝑁(𝛼1)−
𝐶𝑂𝑆(𝛼2)
𝑆𝐸𝑁(𝛼2)
=90.0
0.940
0.342−
0.866
0.500
= 90.0
2.75− 1.73= 88 𝑚
Se il lettore ha riconosciuto la figura, sa anche che si
tratta di una misura più che realistica.
Le misure ottiche di angoli di elevazione posso essere fatte con semplicissimi strumenti (anche
fatti in casa) come quello descritto nella figura sottostante
Ecco come appare il grafico delle funzioni SENO e COSENO con gli angoli espressi rispettivamente
in gradi sessagesimali e radianti
La funzione Esponenziale
Abbiamo familiarità con il concetto di elevamento a potenza di un numero intero, scrivere 34
significa che il dobbiamo moltiplicare i numero quattro volte per se stesso, 34 = 81. Non è difficile
2 = 30° 1
= 20°
d = 90.0 m
8
pensare a nemmeno a 34.5, sarà un qualcosa di intermedio tra 34 e 35 (infatti 34.5 = 140.3, 35 = 243).
Se raffiniamo questo ragionamento possiamo pensare ad un numero intero elevato ad un
esponente che sia, in generale, un numero reale (non necessariamente intero e non
necessariamente un numero originato da una frazione) 3. Ma lo stesso ragionamento lo possiamo
portare a pensare ad un numero reale elevato ad un esponente che sia anch’esso reale. Questa
funzione è spesso riportata nelle calcolatrici tascabili o nelle applicazioni da PC, smartphone e altro
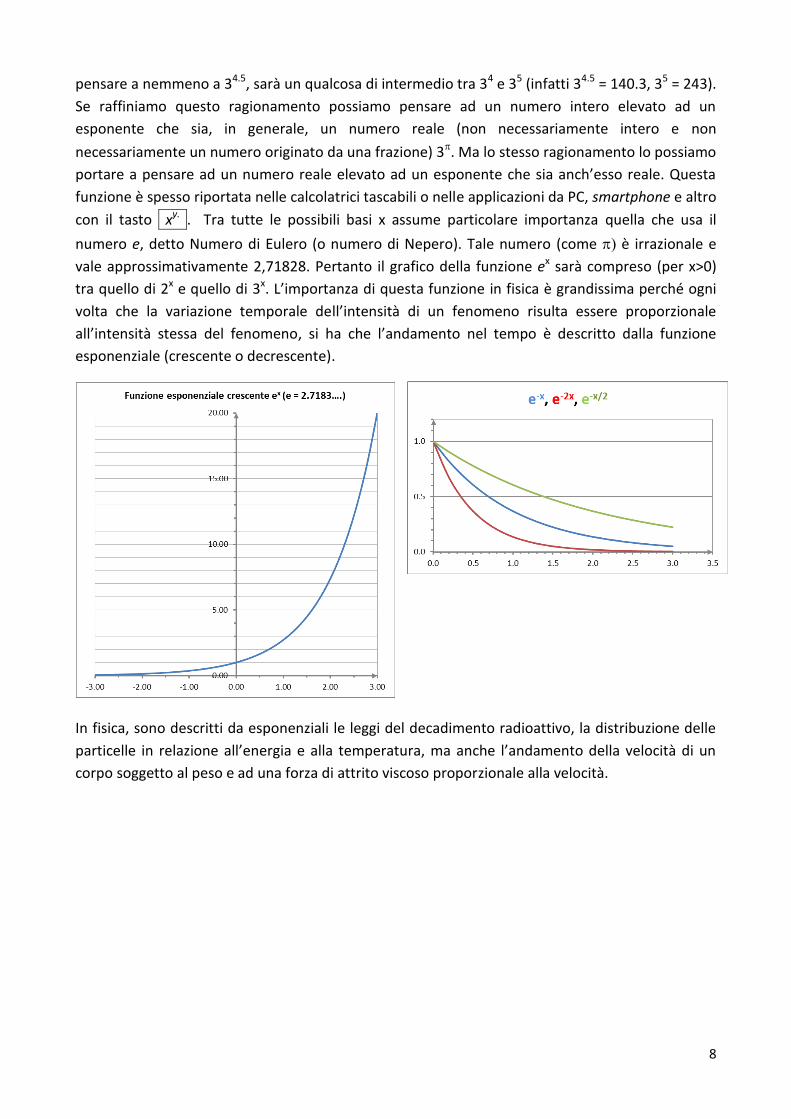
con il tasto xy. . Tra tutte le possibili basi x assume particolare importanza quella che usa il
numero e, detto Numero di Eulero (o numero di Nepero). Tale numero (come è irrazionale e
vale approssimativamente 2,71828. Pertanto il grafico della funzione ex sarà compreso (per x>0)
tra quello di 2x e quello di 3x. L’importanza di questa funzione in fisica è grandissima perché ogni
volta che la variazione temporale dell’intensità di un fenomeno risulta essere proporzionale
all’intensità stessa del fenomeno, si ha che l’andamento nel tempo è descritto dalla funzione
esponenziale (crescente o decrescente).
In fisica, sono descritti da esponenziali le leggi del decadimento radioattivo, la distribuzione delle
particelle in relazione all’energia e alla temperatura, ma anche l’andamento della velocità di un
corpo soggetto al peso e ad una forza di attrito viscoso proporzionale alla velocità.
9
I Logaritmi
Abbiamo tutti una certa familiarità con la seguente espressione 23 = 8, si impara nella scuola
primaria che l’espressione precedente è equivalente a 23 = 2 ∙ 2 ∙ 2 = 8, di questa scrittura
sappiamo fare anche il procedimento inverso, possiamo scrivere cioè √83
= 2, esiste una diversa
domanda legata a questa espressione e cioè: quale esponente devo applicare al numero 2 per
ottenere 8? La risposta alla domanda la si ottiene con i Logaritmi. Possiamo scrivere
log2 8 = 3
Si legge: il logaritmo in base 2 di 8 è uguale a 3. Il numero 2 è chiamato base del logaritmo, il
numero 8 è l’argomento. L’argomento deve essere necessariamente un numero maggiore di zero.
I logaritmi hanno alcune importanti proprietà che li rendevano indispensabili prima dell’avvento
dei calcolatori elettronici:
log𝑎( 𝑏 ∙ 𝑐) = log𝑎 𝑏 + log𝑎 𝑐
log𝑎 𝑏𝑐 = c ∙ log𝑎 𝑏
log𝑎 𝑏 = log𝑐 𝑏
log𝑐 𝑎
Tali proprietà, che non dimostriamo, sono dirette conseguenze delle proprietà delle potenze.
Tra tutte le possibili basi hanno particolare importanza la base 10 e la base e. Le calcolatrici
tascabili riportano queste operazioni con i tasti Log e ln . La funzione ln è detta logaritmo
naturale (e in analisi matematica semplicemente logaritmo). Notiamo che la funzione ln(x) è la
funzione inversa di quella esponenziale. Le applicazioni dei logaritmi sono molteplici, dalla fisica
all’elettronica, spesso legate alla prima proprietà illustrata.
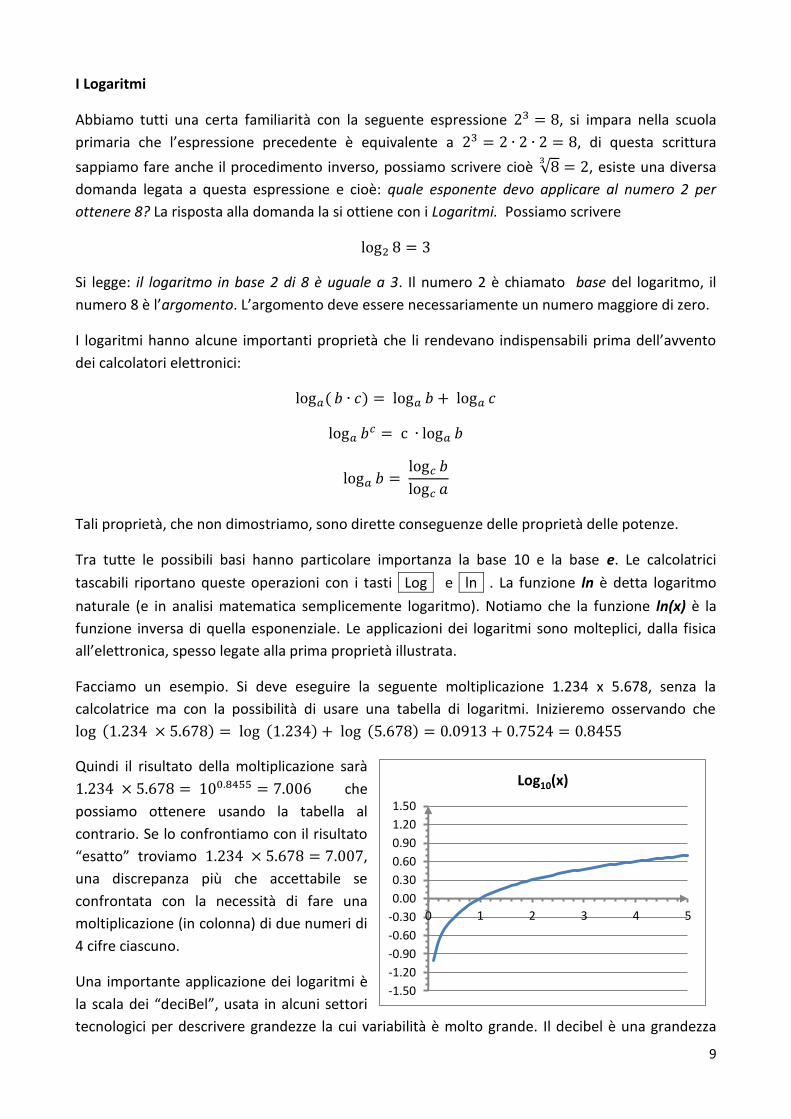
Facciamo un esempio. Si deve eseguire la seguente moltiplicazione 1.234 x 5.678, senza la
calcolatrice ma con la possibilità di usare una tabella di logaritmi. Inizieremo osservando che
log (1.234 × 5.678) = log (1.234) + log (5.678) = 0.0913 + 0.7524 = 0.8455
Quindi il risultato della moltiplicazione sarà
1.234 × 5.678 = 100.8455 = 7.006 che
possiamo ottenere usando la tabella al
contrario. Se lo confrontiamo con il risultato
“esatto” troviamo 1.234 × 5.678 = 7.007,
una discrepanza più che accettabile se
confrontata con la necessità di fare una
moltiplicazione (in colonna) di due numeri di
4 cifre ciascuno.
Una importante applicazione dei logaritmi è
la scala dei “deciBel”, usata in alcuni settori
tecnologici per descrivere grandezze la cui variabilità è molto grande. Il decibel è una grandezza
-1.50
-1.20
-0.90
-0.60
-0.30
0.00
0.30
0.60
0.90
1.20
1.50
0 1 2 3 4 5
Log10(x)

10
derivata dal Bel. Facciamo un esempio legato al suono. Supponiamo di avere un sistema fatto da
microfono, amplificatore e casse audio. Il nostro amplificatore ha la capacità di moltiplicare per
100 il segnale ricevuto dal microfono, cioè se sul microfono incide una potenza Pin = 1 W, alle casse
esce una potenza Pout = 100 W.
La capacità di amplificazione (o guadagno) G viene descritta nel seguente modo:
𝐺 = log10
𝑃𝑜𝑢𝑡
𝑃𝑖𝑛= log10
100
1= 2 [𝐵𝑒𝑙]
Il guadagno G è 2 Bel. Se ridefiniamo il guadagno come la scala Bel moltiplicata per 10 otteniamo
𝐺 = 10 ∙ log10
𝑃𝑜𝑢𝑡
𝑃𝑖𝑛= 10 ∙ log10
100
1= 20 [𝑑𝑒𝑐𝑖𝐵𝑒𝑙]
O semplicemente G = 20 dB. Notiamo che se la potenza in uscita raddoppia, cioè se passa 100 a
200 W, il guadagno cresce di 10Log(2), circa 3 dB
G= 10∙log10
Pout
Pin= 10∙log10
200
1= 10∙( log10 2 + log10 100)= 10 ∙(0.31+2)=23.1 dB
L’utilità pratica della scala dei Decibel risiede nel trasformare una catena di amplificazioni o
perdite (pensate ai segnali delle antenne televisive) in somma di guadagni o perdite (dB negativi)
espressi di decibel.

11
Temperatura e Calore E’ noto che possibile caratterizzare lo stato termico di un corpo con il tatto, la grandezza fisica che descrive lo stato termico si chiama Temperatura, è un grandezza intensiva, è proporzionale all’energia cinetica media che hanno le molecole del corpo stesso. Il calore è una grandezza che descrive l’energia termica complessiva di un corpo (è una grandezza estensiva), è una forma di energia pertanto la sua unità di misura è il Joule. La temperatura, nel sistema internazionale delle unità di misura, si esprime in gradi Kelvin (K senza il segno di grado). Le scale termometriche più diffuse sono tre la scala Kelvin (quella ufficiale del Sistema Internazionale, quella Celsius o centigrada e quella Fahrenheit. Esiste una quarta scala (Réaumur) che non viene più utilizzata. Se facciamo riferimenti ai cambiamenti di stato di aggregazione dell’acqua alla pressione atmosferica (101325 Pa) le tre scale sono così definite: La scala Celsius
pone il valore 0 alla temperatura del ghiaccio fondente (un sistema dove coesistono ghiaccio e acqua pur scambiando calore non cambia la temperatura) e 100 alla temperatura dell’acqua in ebollizione (per questo motivo è comunemente detta scala centigrada). La scala Kelvin pone le due temperature precedenti rispettivamente a 273.15 e 373.15. Questi valori appaiono un po’ bizzarri ma sono stati introdotti dopo che si era osservato l’impossibilità di raggiungere (tecnicamente ma anche logicamente) temperature inferiore al valore di -273.15 °C, detto Zero Assoluto. Non deve apparire strano il fatto che esiste una temperatura “inferiore limite” perché se la temperatura rappresenta l’energia cinetica media vibrazionale delle molecole o degli atomi è possibile che questi siano fermi e che l’energia cinetica sia quindi nulla. Al di sotto di questo limite non ha senso pensare la temperatura. La scala Kelvin pone la sua origine allo zero assoluto e mantiene la divisione in 100 gradi l’intervallo di temperatura determinato dall’acqua. Nella scala Kelvin non esistono valori negativi. La scala Fahrenheit (la più antica delle tre) pone le due temperature rispettivamente a 32 e 212, suddividendo quindi, l’intervallo di temperatura in cui l’acqua è liquida in 180 gradi. Le formule per convertire le scale sono le seguenti:
𝐾 = °𝐶 + 273.15 𝐾 = 5
9 °𝐹 + 255.37
°𝐶 = 𝐾 − 273.15 °𝐶 = 5
9 (°𝐹 − 32)
°𝐹 = 9
5 𝐾 − 459.67 °𝐹 =
9
5 °𝐶 + 32
Confronto tra le più comuni scale termometriche. La scala Réaumur è ormai poco utilizzata
12
Abbiamo detto che il calore rappresenta l’energia interna totale di un corpo e il meccanismi principali che permettono al calore di propagarsi nello spazio sono tre:
Conduzione
Convezione
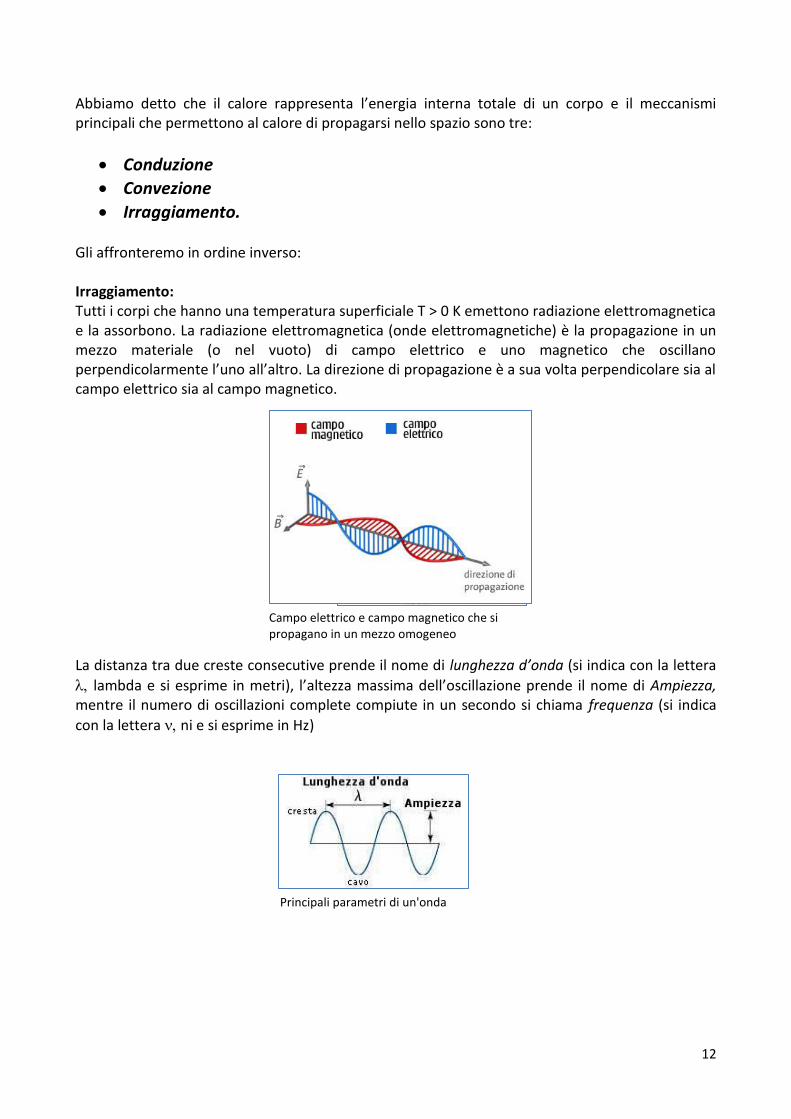
Irraggiamento. Gli affronteremo in ordine inverso: Irraggiamento: Tutti i corpi che hanno una temperatura superficiale T > 0 K emettono radiazione elettromagnetica e la assorbono. La radiazione elettromagnetica (onde elettromagnetiche) è la propagazione in un mezzo materiale (o nel vuoto) di campo elettrico e uno magnetico che oscillano perpendicolarmente l’uno all’altro. La direzione di propagazione è a sua volta perpendicolare sia al campo elettrico sia al campo magnetico.
La distanza tra due creste consecutive prende il nome di lunghezza d’onda (si indica con la lettera
lambda e si esprime in metri), l’altezza massima dell’oscillazione prende il nome di Ampiezza, mentre il numero di oscillazioni complete compiute in un secondo si chiama frequenza (si indica
con la lettera ni e si esprime in Hz)
Campo elettrico e campo magnetico che si propagano in un mezzo omogeneo
Principali parametri di un'onda
13
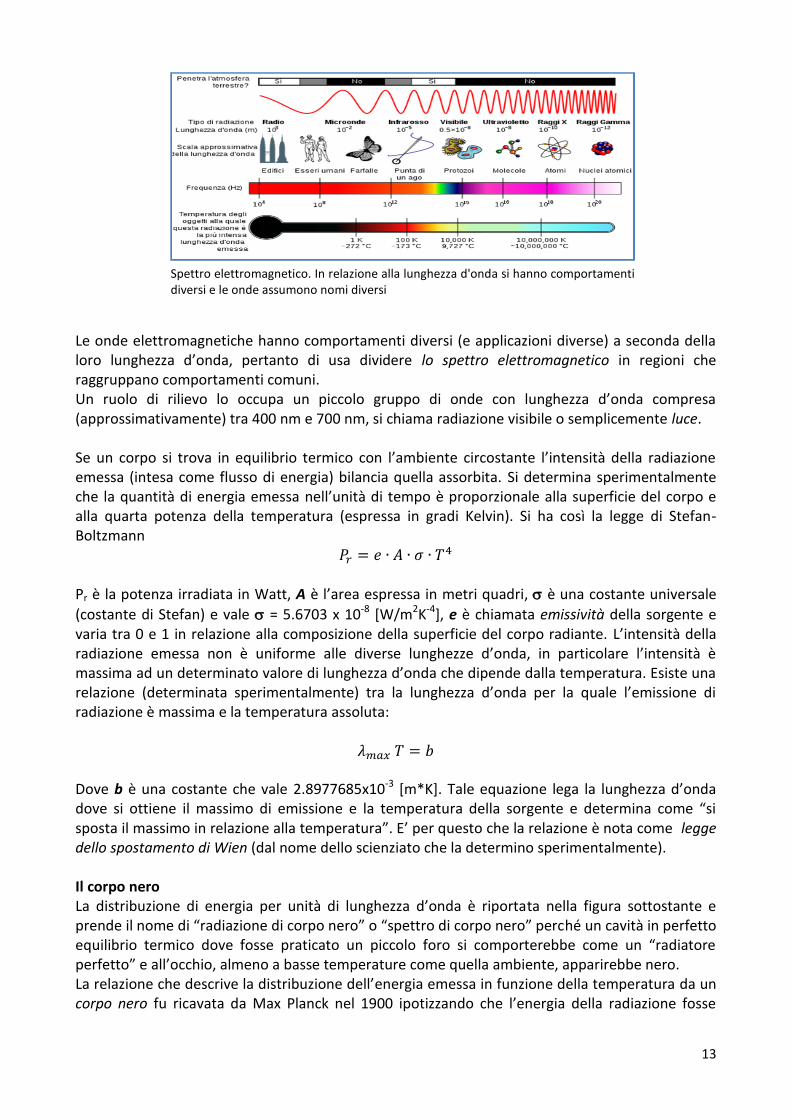
Le onde elettromagnetiche hanno comportamenti diversi (e applicazioni diverse) a seconda della loro lunghezza d’onda, pertanto di usa dividere lo spettro elettromagnetico in regioni che raggruppano comportamenti comuni. Un ruolo di rilievo lo occupa un piccolo gruppo di onde con lunghezza d’onda compresa (approssimativamente) tra 400 nm e 700 nm, si chiama radiazione visibile o semplicemente luce. Se un corpo si trova in equilibrio termico con l’ambiente circostante l’intensità della radiazione emessa (intesa come flusso di energia) bilancia quella assorbita. Si determina sperimentalmente che la quantità di energia emessa nell’unità di tempo è proporzionale alla superficie del corpo e alla quarta potenza della temperatura (espressa in gradi Kelvin). Si ha così la legge di Stefan-Boltzmann
𝑃𝑟 = 𝑒 ∙ 𝐴 ∙ 𝜎 ∙ 𝑇4
Pr è la potenza irradiata in Watt, A è l’area espressa in metri quadri, è una costante universale
(costante di Stefan) e vale = 5.6703 x 10-8 [W/m2K-4], e è chiamata emissività della sorgente e varia tra 0 e 1 in relazione alla composizione della superficie del corpo radiante. L’intensità della radiazione emessa non è uniforme alle diverse lunghezze d’onda, in particolare l’intensità è massima ad un determinato valore di lunghezza d’onda che dipende dalla temperatura. Esiste una relazione (determinata sperimentalmente) tra la lunghezza d’onda per la quale l’emissione di radiazione è massima e la temperatura assoluta:
𝜆𝑚𝑎𝑥 𝑇 = 𝑏 Dove b è una costante che vale 2.8977685x10-3 [m*K]. Tale equazione lega la lunghezza d’onda dove si ottiene il massimo di emissione e la temperatura della sorgente e determina come “si sposta il massimo in relazione alla temperatura”. E’ per questo che la relazione è nota come legge dello spostamento di Wien (dal nome dello scienziato che la determino sperimentalmente). Il corpo nero La distribuzione di energia per unità di lunghezza d’onda è riportata nella figura sottostante e prende il nome di “radiazione di corpo nero” o “spettro di corpo nero” perché un cavità in perfetto equilibrio termico dove fosse praticato un piccolo foro si comporterebbe come un “radiatore perfetto” e all’occhio, almeno a basse temperature come quella ambiente, apparirebbe nero. La relazione che descrive la distribuzione dell’energia emessa in funzione della temperatura da un corpo nero fu ricavata da Max Planck nel 1900 ipotizzando che l’energia della radiazione fosse
Spettro elettromagnetico. In relazione alla lunghezza d'onda si hanno comportamenti diversi e le onde assumono nomi diversi
14
divisa in “pacchetti” (che Einstein chiamò poi fotoni) ciascuno di energia proporzionale alla frequenza. Si ha cioè
𝐸𝜐 = ℎ 𝜈 Dove h è una costante (costante di Planck) il cui valore, determinato sperimentalmente, è h =
6.62606954x10-34 [J*s] e è la frequenza della radiazione associata espressa in Hz. Se la radiazione è descritta mediante la lunghezza d’onda, usando la relazione 𝑐 = 𝜆 𝜐, (dove c è la velocità della luce) otteniamo
𝐸𝜆 =ℎ 𝑐
𝜆
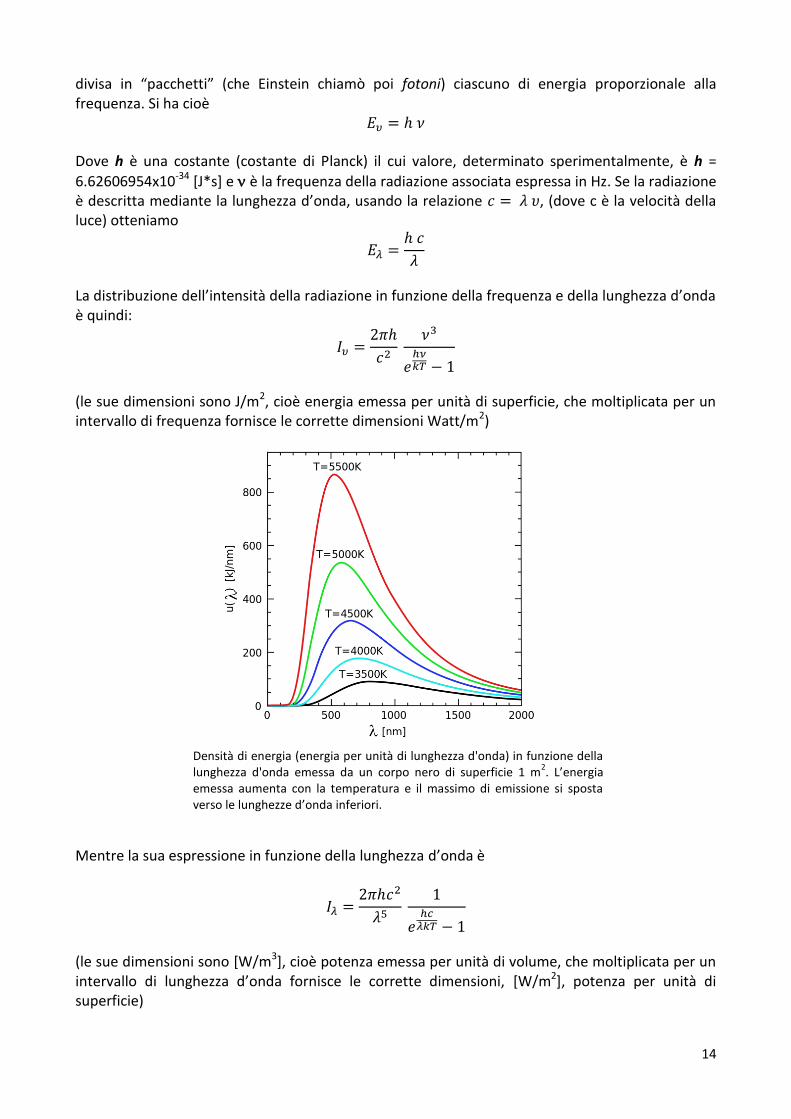
La distribuzione dell’intensità della radiazione in funzione della frequenza e della lunghezza d’onda è quindi:
𝐼𝜐 =2𝜋ℎ
𝑐2
𝜈3
𝑒ℎ𝜈𝑘𝑇 − 1
(le sue dimensioni sono J/m2, cioè energia emessa per unità di superficie, che moltiplicata per un intervallo di frequenza fornisce le corrette dimensioni Watt/m2)
Mentre la sua espressione in funzione della lunghezza d’onda è
𝐼𝜆 =2𝜋ℎ𝑐2
𝜆5
1
𝑒ℎ𝑐
𝜆𝑘𝑇 − 1
(le sue dimensioni sono [W/m3], cioè potenza emessa per unità di volume, che moltiplicata per un intervallo di lunghezza d’onda fornisce le corrette dimensioni, [W/m2], potenza per unità di superficie)
Densità di energia (energia per unità di lunghezza d'onda) in funzione della lunghezza d'onda emessa da un corpo nero di superficie 1 m
2. L’energia
emessa aumenta con la temperatura e il massimo di emissione si sposta verso le lunghezze d’onda inferiori.
15
Usando indifferentemente una di queste due espressioni (e con l’aiuto di un po’ di matematica) si possono ritrovare sia la legge di Stefan sia la legge di Wien. Il corpo nero, oltre a rappresentare la sorgente di radiazione ideale, ha moltissime applicazioni. Permette di ricavare la temperatura superficiale di un oggetto attraverso misure di intensità relativa di radiazione e permette di costruire delle sorgenti di radiazione che hanno il massimo di emissività regolato dalla temperatura. Se ad esempio si intende costruire una sorgente che abbia il
massimo di emissione ad una lunghezza d’onda = 15 m, dove la radiazione è fortemente assorbita dall’anidride carbonica. Potremmo usare della ceramica (che in buona approssimazione si comporta come un corpo nero) e portarla alla temperatura di corpo nero che produce il
massimo a 15 m. Utilizzando la legge dello spostamento di Wien abbiamo
𝑇 = 𝑏
𝜆𝑚𝑎𝑥=
0,002898
0.000015= 193 𝐾
Circa -80 °C. Una temperatura decisamente bassa, raggiungibile solo con frigoriferi a doppio stato. Se invece si intende studiare l’assorbimento della CO2 intorno a l = 2.5 mm, otteniamo:
𝑇 = 𝑏
𝜆𝑚𝑎𝑥=
0,002898
0.0000025= 1160 𝐾
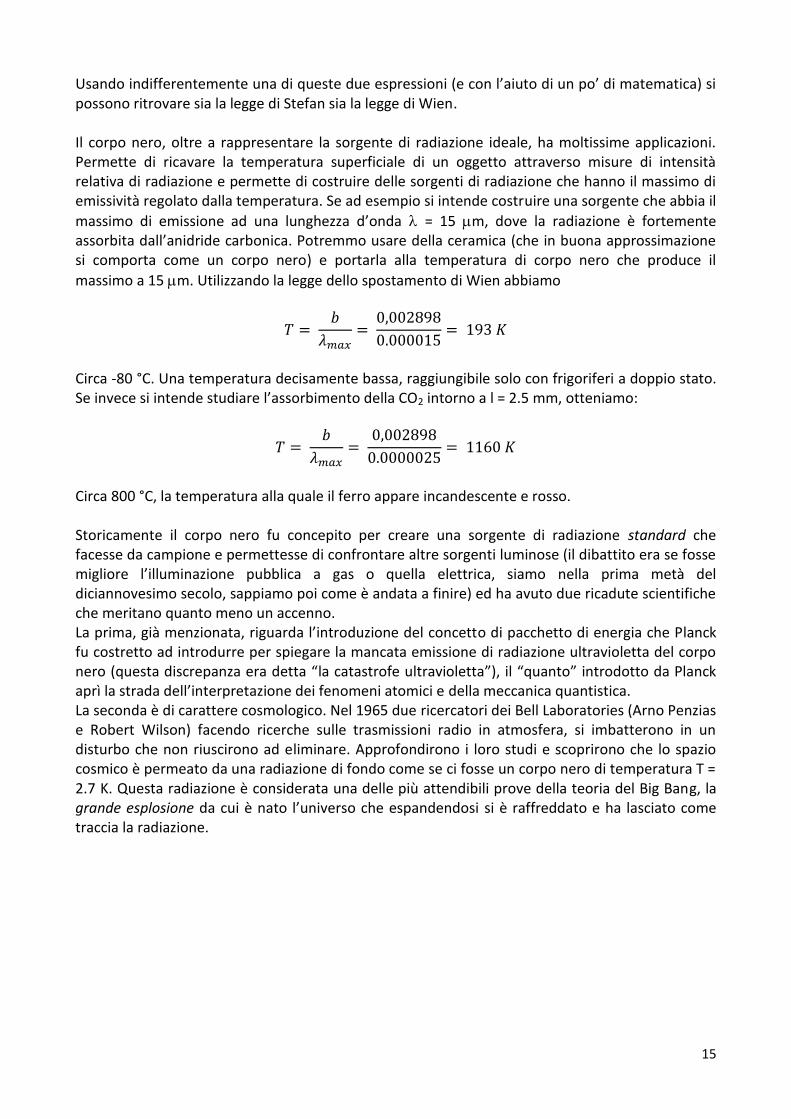
Circa 800 °C, la temperatura alla quale il ferro appare incandescente e rosso. Storicamente il corpo nero fu concepito per creare una sorgente di radiazione standard che facesse da campione e permettesse di confrontare altre sorgenti luminose (il dibattito era se fosse migliore l’illuminazione pubblica a gas o quella elettrica, siamo nella prima metà del diciannovesimo secolo, sappiamo poi come è andata a finire) ed ha avuto due ricadute scientifiche che meritano quanto meno un accenno. La prima, già menzionata, riguarda l’introduzione del concetto di pacchetto di energia che Planck fu costretto ad introdurre per spiegare la mancata emissione di radiazione ultravioletta del corpo nero (questa discrepanza era detta “la catastrofe ultravioletta”), il “quanto” introdotto da Planck aprì la strada dell’interpretazione dei fenomeni atomici e della meccanica quantistica. La seconda è di carattere cosmologico. Nel 1965 due ricercatori dei Bell Laboratories (Arno Penzias e Robert Wilson) facendo ricerche sulle trasmissioni radio in atmosfera, si imbatterono in un disturbo che non riuscirono ad eliminare. Approfondirono i loro studi e scoprirono che lo spazio cosmico è permeato da una radiazione di fondo come se ci fosse un corpo nero di temperatura T = 2.7 K. Questa radiazione è considerata una delle più attendibili prove della teoria del Big Bang, la grande esplosione da cui è nato l’universo che espandendosi si è raffreddato e ha lasciato come traccia la radiazione.
16
Recenti esperimenti che hanno utilizzato sensori posti fuori dall’atmosfera terrestre hanno confermato il ruolo di testimone del big bang che ha la radiazione cosmica di fondo, portando l’età dell’universo a poco più di 13 miliardi di anni in accordo con altre considerazioni astrofisiche. Equilibrio per irraggiamento Se un corpo emette energia per effetto della sua temperatura superficiale T0 è anche vero che ne assorbe dall’ambiente circostante con lo stesso meccanismo, se la temperatura ambiente 𝑇∞ non è dissimile da quello del corpo la potenza irraggiata sarà data dalla differenza tra quella emessa e quella assorbita.
𝑃𝑒𝑞 = 𝑒𝐴 𝜎 (𝑇04 − 𝑇∞
4 )
Utilizzando questa espressione e supponendo che e = 0.5, stimiamo quanta energia dissipa per irraggiamento un persona in un’ora. Sia T0 = 36.5 °C cioè 309.5 K, 𝑇∞ = 20 °𝐶, cioè 293 K. La superficie radiante complessiva A = 1.5 m2, otteniamo
𝑃𝑒𝑞 = 𝑒𝐴 𝜎 (𝑇04 − 𝑇∞
4 ) = 0.5 ∙ 1.5 ∙ 5.6703 × 10−8 ∙ (3104 − 2934) =
= 4.2527 × 10−8(9235210000 − 7370050801) = 7.93 × 109 × 10−8 ≅ 80 𝑊
Quindi l’energia persa in un’ora sarà E = Peq x 3600 = 288000 J (circa 70 Kcal, infatti stare in un ambiente a 20 °C senza adeguate coperture provoca una sensazione di freddo!) Lo stesso fenomeno avviene per le pareti e le finestre di una abitazione, non potendo determinare la temperatura esterna e necessitando di una temperatura interna stabile, compresa tra i 22 e i 27 °C, per limitare lo scambio termico per irraggiamento si cercano materiali che abbiano l’emissività più piccola possibile. Convezione Nella convezione, modo di propagazione tipico dei fluidi, la propagazione del calore avviene con trasporto macroscopico di materia. Mentre nei fluidi si può avere anche trasporto di calore per
Spettro della radiazione di fondo misurabile nello spazio corrispondente a un corpo nero di temperatura 2.7 K
17
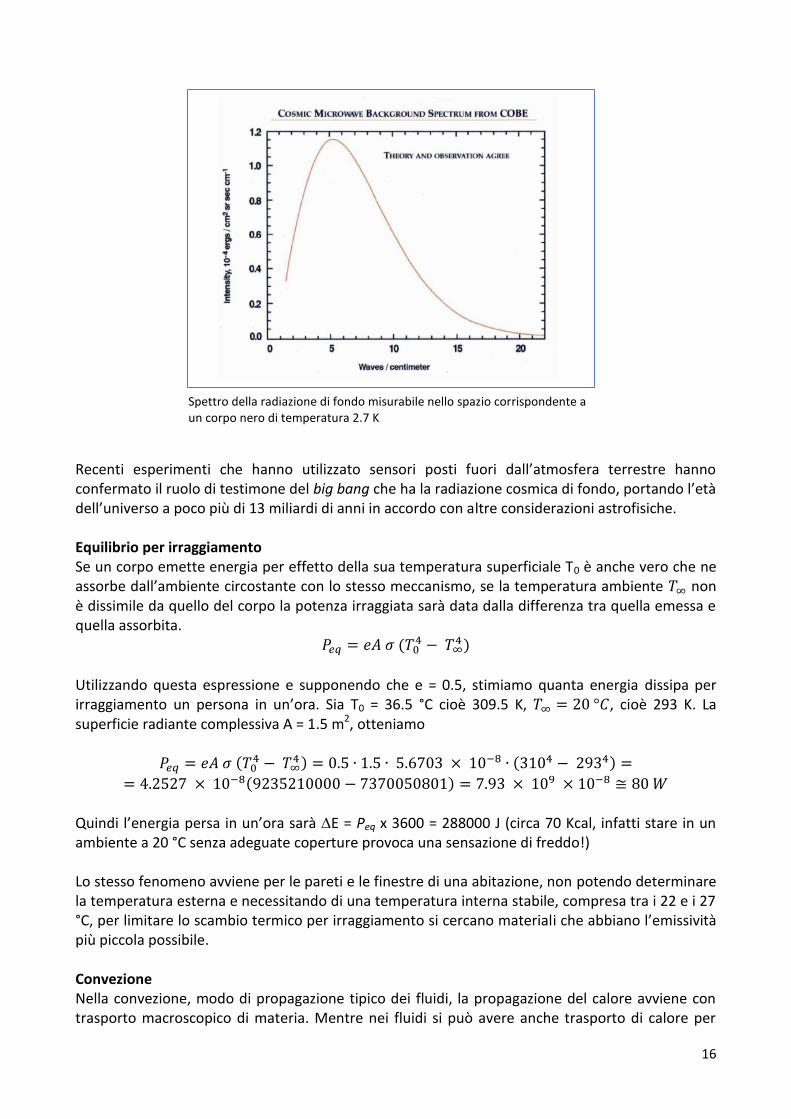
convezione, il contrario non avviene mai nei solidi, nei quali la convezione non può aver luogo. La convezione, che costituisce il modo di trasporto di calore più sfruttato nelle applicazioni (basta pensare alle caldaie o agli impianti di riscaldamento centralizzati ) può essere naturale o forzata. Nel primo caso le porzioni di fluido più vicine alla sorgente di calore si dilatano diventando più leggere e meno dense di quelle sovrastanti. Le porzioni di fluido più calde prendono il posto di quelle più fredde e viceversa dando così luogo all’instaurarsi di una corrente fluida con trasporto di calore. Nel caso della convezione forzata, le correnti fluide sono provocate artificialmente e per effettuare il trasporto di calore è necessario compiere un lavoro esterno per mantenere le correnti nel fluido; generalmente alla convezione forzata si sovrappone la convezione naturale.
La quantità di calore scambiata, Q, dalla superficie di un corpo solido e un fluido, in un tempo
infinitesimo t, dipende dall’area della superficie di contatto, S, e dalla differenza di
temperatura, T, tra quest’ultima e il fluido.
In una prima approssimazione, secondo un’equazione dovuta a Newton, si può scrivere:
∆𝑄
∆𝑡= ℎ (𝑇0 − 𝑇∞)
dove h è una costante detta coefficiente di convezione.; essa rappresenta la quantità di calore (2) scambiata nell’unità di tempo tra la superficie unitaria e il fluido quando la differenza di temperatura tra essi è di 1°K. La convezione è un meccanismo molto efficace ma anche molto complesso e di difficile. Spesso i moti convettivi sono raggruppati per tipologie caratterizzate da comportamenti simili (moti laminari, turbolenti) e identificate da numeri adimensionali. Il più famoso ed importante è il numero di Reynolds (proporzionale al rapporto tra le forze d’inerzia e le forze viscose). Nei liquidi, come in figura, la convezione avviene quando la parte inferiore, trovandosi a contatto con la sorgente di calore, acquista sufficiente energia da dilatarsi e, essendo più leggera dalla parte sovrastante, tende a salire e si attivano dei moti che fanno salire il liquido caldo e richiamano verso il basso la parte più fredda. Moti convettivi si hanno anche nelle abitazioni e si attivano all’interno dei dispositivi di riscaldamento
Coefficiente h Convezione Naturale Convezione Forzata
Andamento di un fluido per convezione. Nella parte centrale del corpo caldo è ragionevole che la temperatura sia maggiore rispetto ai bordi. Il fluido in contatto con la parte ad alta temperatura avrà una spinta idrostatica maggiore di quello ai bordi, inoltre il fluido salendo si raffredda e si innesca un meccanismo di circolazione.

18
Gas 2 - 25 25 - 250
Liquidi 50 - 1000 50 - 20000
Conduzione: Il meccanismo di propagazione caratteristico delle sostanze solide è la conduzione. La sua interpretazione è relativamente semplice. Trasferimento di energia cinetica attraverso gli urti tra atomi o molecole vicine in moto di agitazione dovuto alla temperatura. Maggiore temperatura corrisponde ad una maggiore energia cinetica che, in urti successivi, tende a distribuirsi in modo uniforme. Si capisce perché il calore fluisce dai corpi (o dalle zone) ad alte temperatura verso i corpi (o le zone) a bassa temperatura. Poiché il numero di atomi coinvolti è enorme (Numero di Avogadro) diventa statisticamente impossibile che siano gli atomi più lenti ad accelerare attraverso gli urti quelli più veloci, succederà il contrario e, se non ci sono interazioni con l’esterno, un sistema fisico isolato tende ad avere la stessa temperatura. L’equazione che descrive il flusso di calore attraverso una parte di solido omogeneo fu trovata sperimentalmente da Fourier
∆𝑄
∆𝑡= 𝑘
𝐴
𝑑 (𝑇1 − 𝑇2)
Dice che se le due facce di una parete di spessore d ed area A, sono mantenute a due temperature diverse T1 e T2 con T1 > T1, si ha un flusso constante di calore dalla faccia a temperatura maggiore verso quella a temperatura minore. Tale flusso sarà inversamente proporzionale allo spessore della parete, direttamente proporzionale alla superficie della parete, alla differenza di temperatura e a un coefficiente k caratteristico del materiale che prende il nome di conducibilità termica. Le unità di misura della conducibilità termica sono W/m*K (oppure J/s*m*K) Analogia elettrica Possiamo riscrivere l’equazione di Fourier nel seguente modo
1
𝑘
𝑑
𝐴 ∆𝑄
∆𝑡= (𝑇1 − 𝑇2)
Chiamiamo il fattore 1
𝑘
𝑑
𝐴 Resistenza Termica e indichiamolo con RT, otteniamo
𝑅𝑇
∆𝑄
∆𝑡= ∆𝑇
Il flusso di calore moltiplicato per una costante (che dipende dalla geometria e costituzione del mezzo) è uguale alla differenza di temperatura. Questa equazione è del tutto analoga alla prima legge di Ohm che lega la corrente elettrica (flusso di carica) alla differenza di potenziale mediante un fattore detto, appunto, Resistenza. Le unità di misura della resistenza termica sono K /W.
19
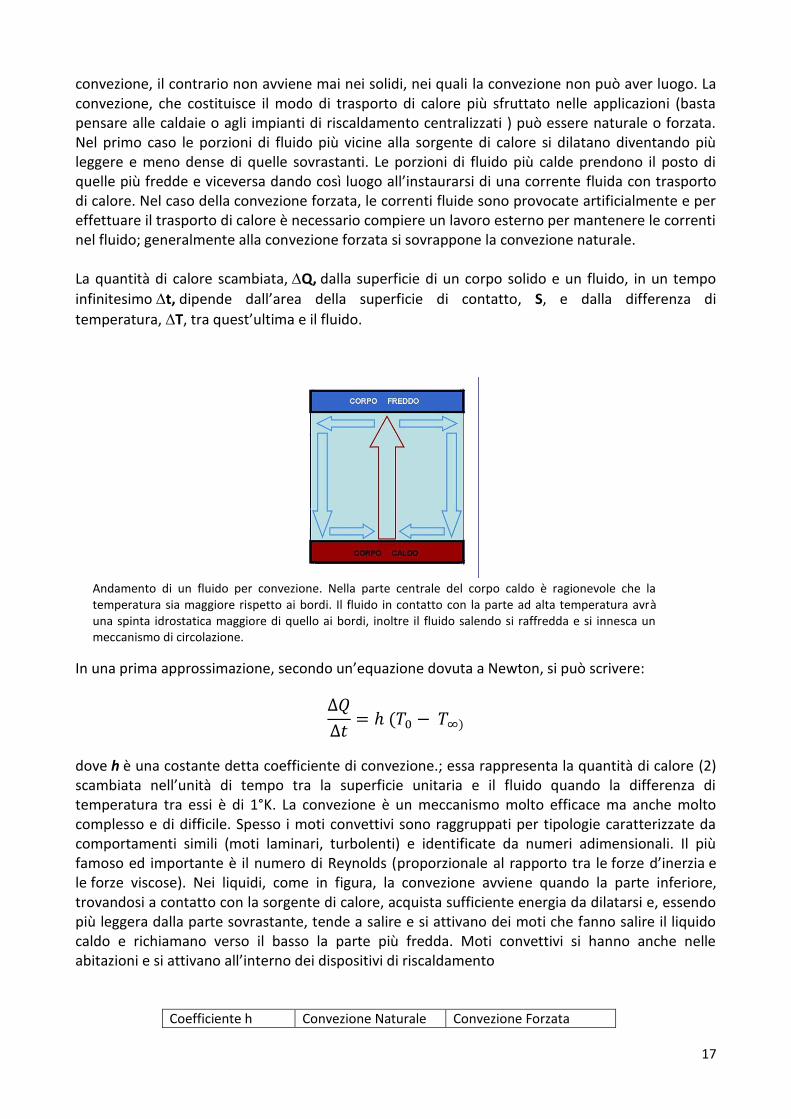
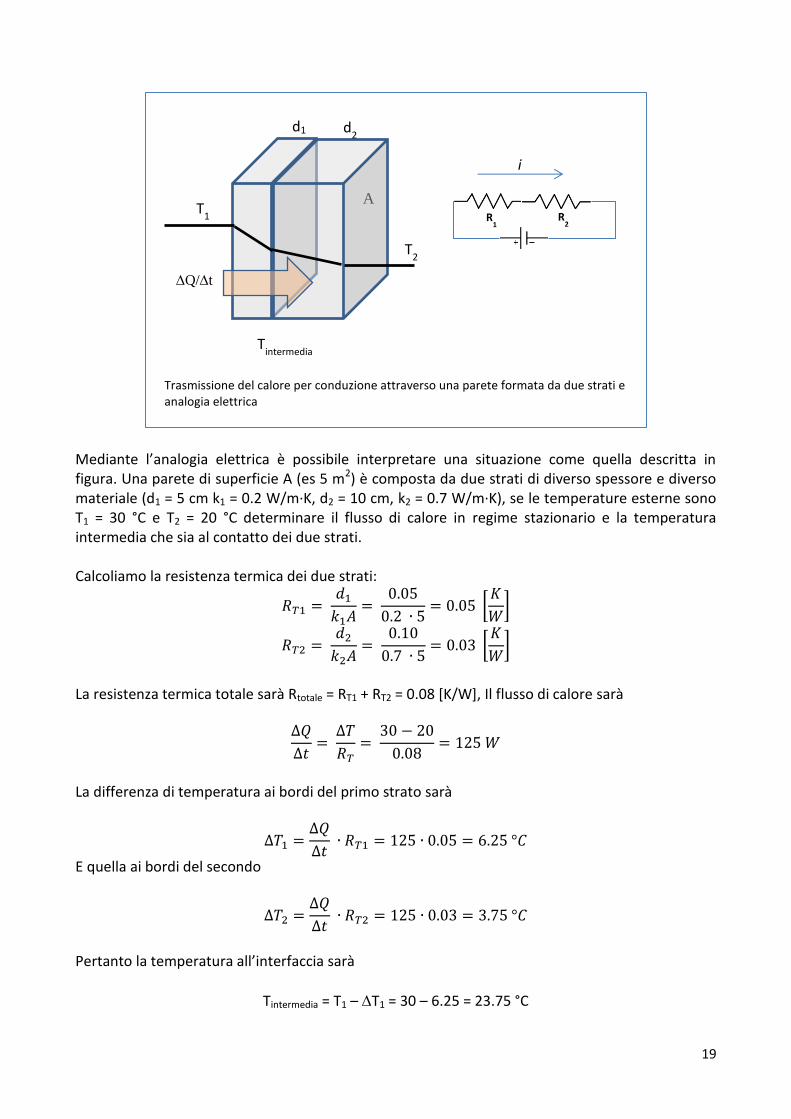
Mediante l’analogia elettrica è possibile interpretare una situazione come quella descritta in figura. Una parete di superficie A (es 5 m2) è composta da due strati di diverso spessore e diverso materiale (d1 = 5 cm k1 = 0.2 W/m·K, d2 = 10 cm, k2 = 0.7 W/m·K), se le temperature esterne sono T1 = 30 °C e T2 = 20 °C determinare il flusso di calore in regime stazionario e la temperatura intermedia che sia al contatto dei due strati. Calcoliamo la resistenza termica dei due strati:
𝑅𝑇1 = 𝑑1
𝑘1𝐴=
0.05
0.2 ∙ 5= 0.05 [
𝐾
𝑊]
𝑅𝑇2 = 𝑑2
𝑘2𝐴=
0.10
0.7 ∙ 5= 0.03 [
𝐾
𝑊]
La resistenza termica totale sarà Rtotale = RT1 + RT2 = 0.08 [K/W], Il flusso di calore sarà
∆𝑄
∆𝑡=
∆𝑇
𝑅𝑇=
30 − 20
0.08= 125 𝑊
La differenza di temperatura ai bordi del primo strato sarà
∆𝑇1 =∆𝑄
∆𝑡 ∙ 𝑅𝑇1 = 125 ∙ 0.05 = 6.25 °𝐶
E quella ai bordi del secondo
∆𝑇2 =∆𝑄
∆𝑡 ∙ 𝑅𝑇2 = 125 ∙ 0.03 = 3.75 °𝐶
Pertanto la temperatura all’interfaccia sarà
Tintermedia = T1 – T1 = 30 – 6.25 = 23.75 °C
T2
T1
Q/t
A
d1 d2
Tintermedia
i
R1 R
2
Trasmissione del calore per conduzione attraverso una parete formata da due strati e analogia elettrica
20
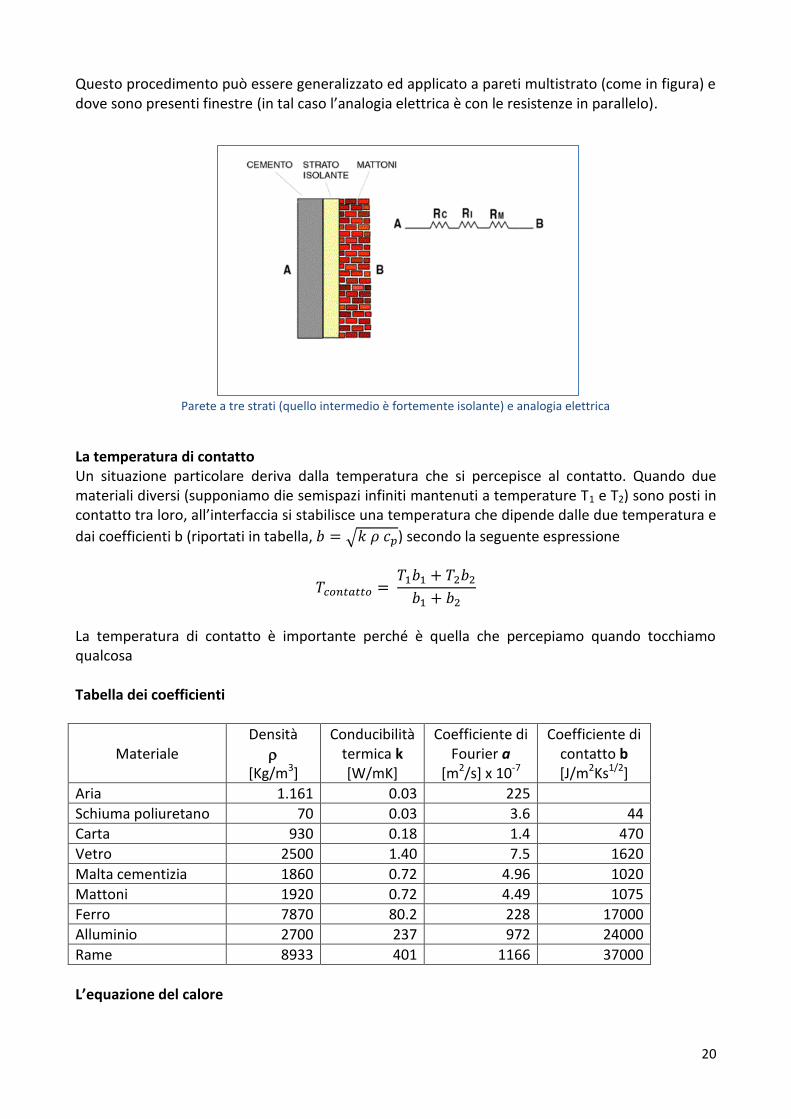
Questo procedimento può essere generalizzato ed applicato a pareti multistrato (come in figura) e dove sono presenti finestre (in tal caso l’analogia elettrica è con le resistenze in parallelo).
Parete a tre strati (quello intermedio è fortemente isolante) e analogia elettrica
La temperatura di contatto Un situazione particolare deriva dalla temperatura che si percepisce al contatto. Quando due materiali diversi (supponiamo die semispazi infiniti mantenuti a temperature T1 e T2) sono posti in contatto tra loro, all’interfaccia si stabilisce una temperatura che dipende dalle due temperatura e
dai coefficienti b (riportati in tabella, 𝑏 = √𝑘 𝜌 𝑐𝑝) secondo la seguente espressione
𝑇𝑐𝑜𝑛𝑡𝑎𝑡𝑡𝑜 = 𝑇1𝑏1 + 𝑇2𝑏2
𝑏1 + 𝑏2
La temperatura di contatto è importante perché è quella che percepiamo quando tocchiamo qualcosa Tabella dei coefficienti
Materiale
Densità
[Kg/m3]
Conducibilità termica k [W/mK]
Coefficiente di Fourier a
[m2/s] x 10-7
Coefficiente di contatto b [J/m2Ks1/2]
Aria 1.161 0.03 225
Schiuma poliuretano 70 0.03 3.6 44
Carta 930 0.18 1.4 470
Vetro 2500 1.40 7.5 1620
Malta cementizia 1860 0.72 4.96 1020
Mattoni 1920 0.72 4.49 1075
Ferro 7870 80.2 228 17000
Alluminio 2700 237 972 24000
Rame 8933 401 1166 37000
L’equazione del calore
21
Consideriamo un materiale omogeneo a forma di parallelepipedo (una porzione di un muro) di
superficie A e spessore d. Il materiale abbia densità , calore specifico cs e conducibilità termica k. Immaginiamo che la sezione A sia molto grande rispetto allo spessore d (es, A = 2 m2, d = 10 cm). La massa m del materiale sarà il prodotto della densità per il volume 𝑚 = 𝜌 ∙ 𝐴 ∙ 𝑑
Se il materiale modifica la sua temperatura di una quantità T, l’equazione fondamentale della calorimetria ci permette di determinare la variazione della sua energia interna
∆𝑈 = 𝑚 𝑐𝑠 ∆𝑇 Se le due facce sono mantenute a diverse temperature, all’interno del materiale si avrà un flusso di calore costante descritto dalla legge di Fourier
∆𝑄
∆𝑡= 𝑘
𝐴
𝑑 ∆𝑇
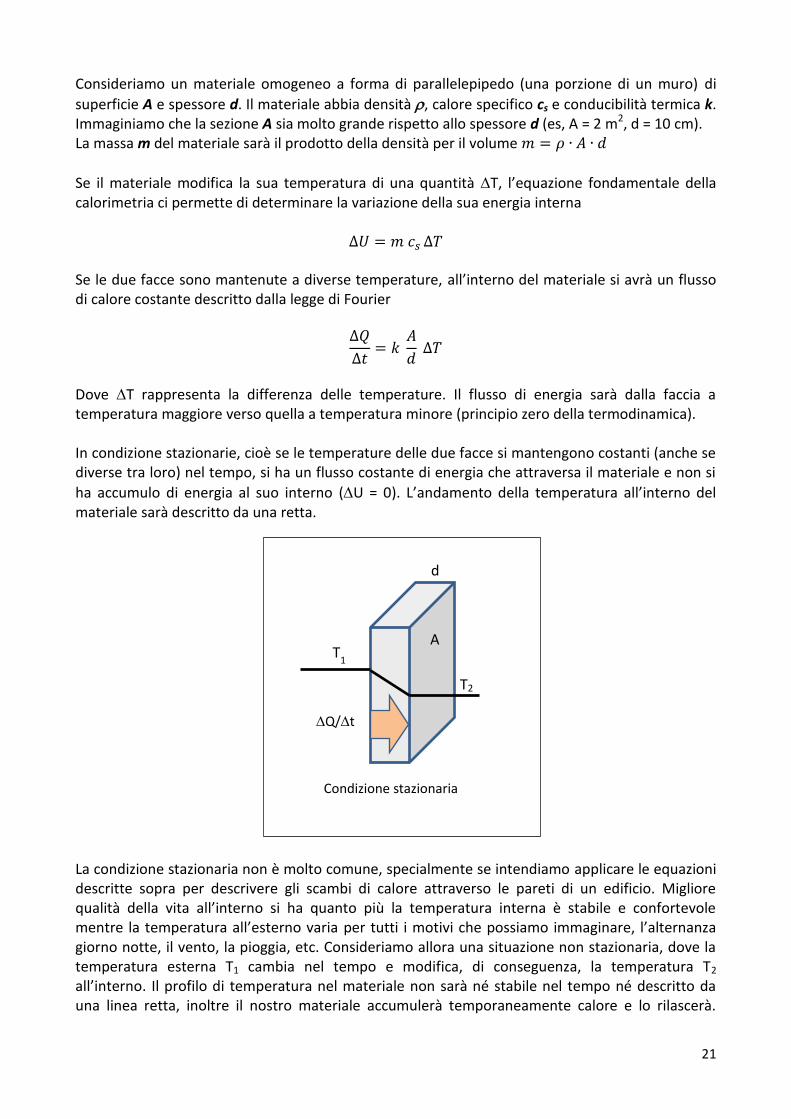
Dove T rappresenta la differenza delle temperature. Il flusso di energia sarà dalla faccia a temperatura maggiore verso quella a temperatura minore (principio zero della termodinamica). In condizione stazionarie, cioè se le temperature delle due facce si mantengono costanti (anche se diverse tra loro) nel tempo, si ha un flusso costante di energia che attraversa il materiale e non si
ha accumulo di energia al suo interno (U = 0). L’andamento della temperatura all’interno del materiale sarà descritto da una retta.
La condizione stazionaria non è molto comune, specialmente se intendiamo applicare le equazioni descritte sopra per descrivere gli scambi di calore attraverso le pareti di un edificio. Migliore qualità della vita all’interno si ha quanto più la temperatura interna è stabile e confortevole mentre la temperatura all’esterno varia per tutti i motivi che possiamo immaginare, l’alternanza giorno notte, il vento, la pioggia, etc. Consideriamo allora una situazione non stazionaria, dove la temperatura esterna T1 cambia nel tempo e modifica, di conseguenza, la temperatura T2 all’interno. Il profilo di temperatura nel materiale non sarà né stabile nel tempo né descritto da una linea retta, inoltre il nostro materiale accumulerà temporaneamente calore e lo rilascerà.
Condizione stazionaria
T2
T1
Q/t
A
d
22
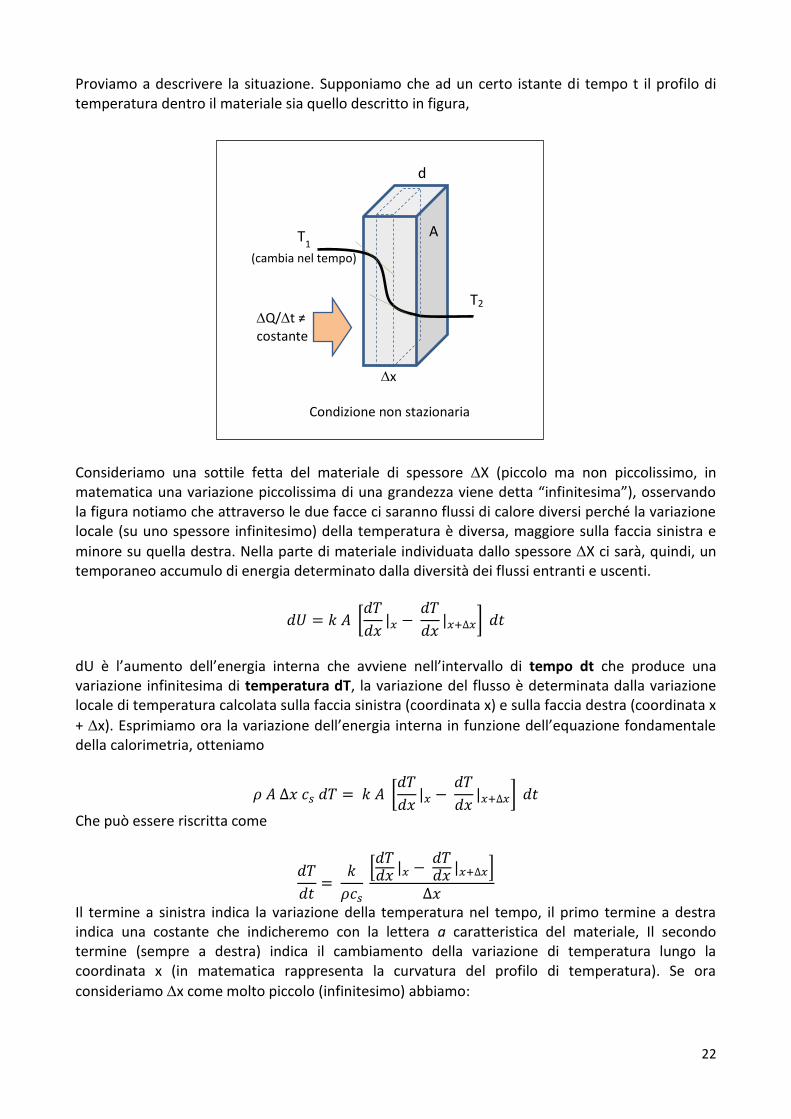
Proviamo a descrivere la situazione. Supponiamo che ad un certo istante di tempo t il profilo di temperatura dentro il materiale sia quello descritto in figura,
Consideriamo una sottile fetta del materiale di spessore X (piccolo ma non piccolissimo, in matematica una variazione piccolissima di una grandezza viene detta “infinitesima”), osservando la figura notiamo che attraverso le due facce ci saranno flussi di calore diversi perché la variazione locale (su uno spessore infinitesimo) della temperatura è diversa, maggiore sulla faccia sinistra e
minore su quella destra. Nella parte di materiale individuata dallo spessore X ci sarà, quindi, un temporaneo accumulo di energia determinato dalla diversità dei flussi entranti e uscenti.
𝑑𝑈 = 𝑘 𝐴 [𝑑𝑇
𝑑𝑥|𝑥 −
𝑑𝑇
𝑑𝑥|𝑥+∆𝑥] 𝑑𝑡
dU è l’aumento dell’energia interna che avviene nell’intervallo di tempo dt che produce una variazione infinitesima di temperatura dT, la variazione del flusso è determinata dalla variazione locale di temperatura calcolata sulla faccia sinistra (coordinata x) e sulla faccia destra (coordinata x
+ x). Esprimiamo ora la variazione dell’energia interna in funzione dell’equazione fondamentale della calorimetria, otteniamo
𝜌 𝐴 ∆𝑥 𝑐𝑠 𝑑𝑇 = 𝑘 𝐴 [𝑑𝑇
𝑑𝑥|𝑥 −
𝑑𝑇
𝑑𝑥|𝑥+∆𝑥] 𝑑𝑡
Che può essere riscritta come
𝑑𝑇
𝑑𝑡=
𝑘
𝜌𝑐𝑠 [𝑑𝑇𝑑𝑥
|𝑥 − 𝑑𝑇𝑑𝑥
|𝑥+∆𝑥]
∆𝑥
Il termine a sinistra indica la variazione della temperatura nel tempo, il primo termine a destra indica una costante che indicheremo con la lettera a caratteristica del materiale, Il secondo termine (sempre a destra) indica il cambiamento della variazione di temperatura lungo la coordinata x (in matematica rappresenta la curvatura del profilo di temperatura). Se ora
consideriamo x come molto piccolo (infinitesimo) abbiamo:
T1
(cambia nel tempo)
Condizione non stazionaria
T2 Q/t ≠ costante
A
d
x
23
𝑑𝑇
𝑑𝑡= 𝑎
𝑑2𝑇
𝑑𝑥2
Otteniamo così (non senza acrobazie) la famosa equazione del trasporto del calore che lega la variazione nel tempo della temperatura con la curvatura del profilo spaziale della temperatura stessa. Messa così è poco utile, però permette di riscostruire l’andamento spaziale della temperatura se si conosce come varia nel tempo e il valore della temperatura su una superficie e se si dispone di un computer e di un poco di pazienza. La costante a è il rapporto della conducibilità termica con il prodotto della densità per il calore specifico, ed è chiamata “diffusività termica”, le sue dimensioni sono [m2/s]. Flusso di calore attraverso una parete piana con andamento periodico Passiamo subito al caso che più interessa, ci chiediamo come cambia la temperatura dentro un muro (e sulla superficie interna) quando la temperatura varia su una delle due superfici, magari in modo periodico (periodo = 24 h) oscillando intorno ad un valore medio. Esiste anche un regime variabile (non stazionario) che si ha per esempio nel caso di una variazione repentina della temperatura di una delle due facce limite di una parete, osserviamo che il regime di temperatura nella parete si può raggiungere a profondità più o meno elevate, a seconda di come varia il parametro a (diffusività termica). In sintesi, un repentino crollo di temperatura può essere avvertito, attraverso le diverse sezioni trasversali della parete dopo un tempo estremamente variabile, in funzione del parametro a . Per sintetizzare definiamo: Conducibilità termica: k attitudine di un materiale a condurre il calore.
Capacità termica: ×cs (densità x calore specifico) quantità di energia che un materiale è in grado di accumulare per unità di volume.
Diffusività termica: a rapporto del calore trasmesso per conduzione rispetto al
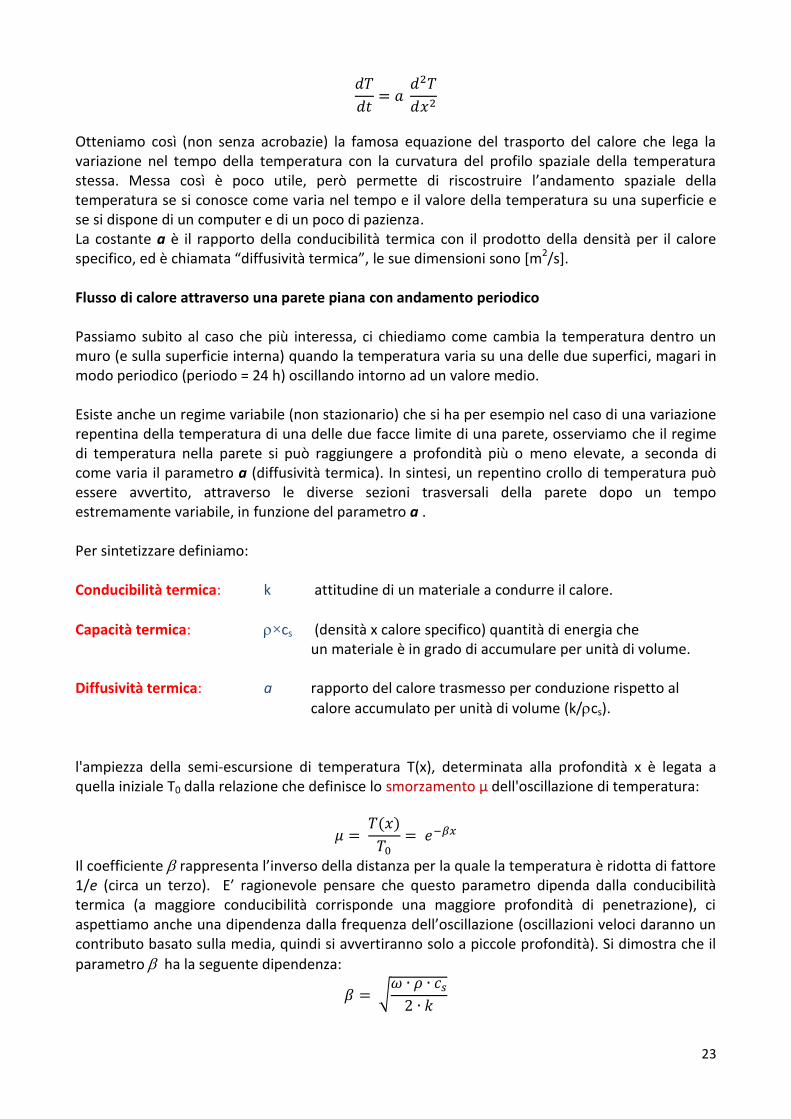
calore accumulato per unità di volume (k/cs). l'ampiezza della semi-escursione di temperatura T(x), determinata alla profondità x è legata a quella iniziale T0 dalla relazione che definisce lo smorzamento μ dell'oscillazione di temperatura:
𝜇 = 𝑇(𝑥)
𝑇0= 𝑒−𝛽𝑥
Il coefficiente rappresenta l’inverso della distanza per la quale la temperatura è ridotta di fattore 1/e (circa un terzo). E’ ragionevole pensare che questo parametro dipenda dalla conducibilità termica (a maggiore conducibilità corrisponde una maggiore profondità di penetrazione), ci aspettiamo anche una dipendenza dalla frequenza dell’oscillazione (oscillazioni veloci daranno un contributo basato sulla media, quindi si avvertiranno solo a piccole profondità). Si dimostra che il
parametro ha la seguente dipendenza:
𝛽 = √𝜔 ∙ 𝜌 ∙ 𝑐𝑠
2 ∙ 𝑘
24
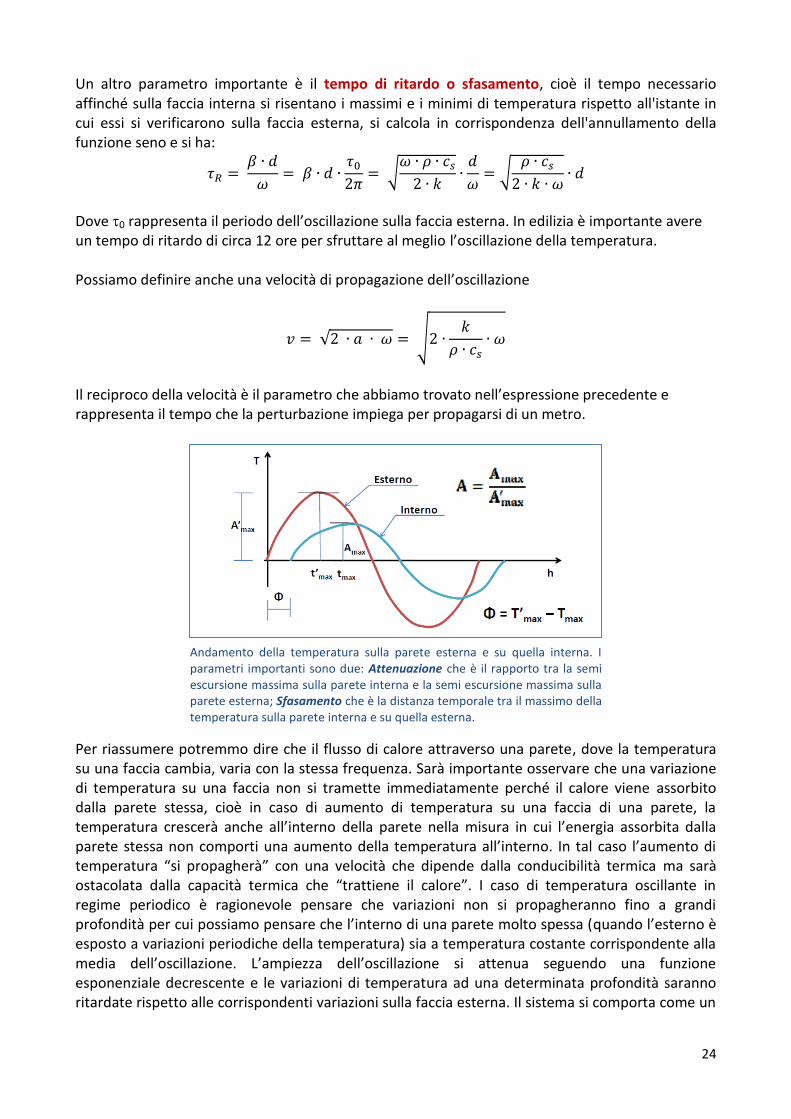
Un altro parametro importante è il tempo di ritardo o sfasamento, cioè il tempo necessario affinché sulla faccia interna si risentano i massimi e i minimi di temperatura rispetto all'istante in cui essi si verificarono sulla faccia esterna, si calcola in corrispondenza dell'annullamento della funzione seno e si ha:
𝜏𝑅 = 𝛽 ∙ 𝑑
𝜔= 𝛽 ∙ 𝑑 ∙
𝜏0
2𝜋= √
𝜔 ∙ 𝜌 ∙ 𝑐𝑠
2 ∙ 𝑘∙
𝑑
𝜔= √
𝜌 ∙ 𝑐𝑠
2 ∙ 𝑘 ∙ 𝜔∙ 𝑑
Dove 0 rappresenta il periodo dell’oscillazione sulla faccia esterna. In edilizia è importante avere un tempo di ritardo di circa 12 ore per sfruttare al meglio l’oscillazione della temperatura. Possiamo definire anche una velocità di propagazione dell’oscillazione
𝑣 = √2 ∙ 𝑎 ∙ 𝜔 = √2 ∙𝑘
𝜌 ∙ 𝑐𝑠∙ 𝜔
Il reciproco della velocità è il parametro che abbiamo trovato nell’espressione precedente e rappresenta il tempo che la perturbazione impiega per propagarsi di un metro.
Per riassumere potremmo dire che il flusso di calore attraverso una parete, dove la temperatura su una faccia cambia, varia con la stessa frequenza. Sarà importante osservare che una variazione di temperatura su una faccia non si tramette immediatamente perché il calore viene assorbito dalla parete stessa, cioè in caso di aumento di temperatura su una faccia di una parete, la temperatura crescerà anche all’interno della parete nella misura in cui l’energia assorbita dalla parete stessa non comporti una aumento della temperatura all’interno. In tal caso l’aumento di temperatura “si propagherà” con una velocità che dipende dalla conducibilità termica ma sarà ostacolata dalla capacità termica che “trattiene il calore”. I caso di temperatura oscillante in regime periodico è ragionevole pensare che variazioni non si propagheranno fino a grandi profondità per cui possiamo pensare che l’interno di una parete molto spessa (quando l’esterno è esposto a variazioni periodiche della temperatura) sia a temperatura costante corrispondente alla media dell’oscillazione. L’ampiezza dell’oscillazione si attenua seguendo una funzione esponenziale decrescente e le variazioni di temperatura ad una determinata profondità saranno ritardate rispetto alle corrispondenti variazioni sulla faccia esterna. Il sistema si comporta come un
Andamento della temperatura sulla parete esterna e su quella interna. I parametri importanti sono due: Attenuazione che è il rapporto tra la semi escursione massima sulla parete interna e la semi escursione massima sulla parete esterna; Sfasamento che è la distanza temporale tra il massimo della temperatura sulla parete interna e su quella esterna.
25
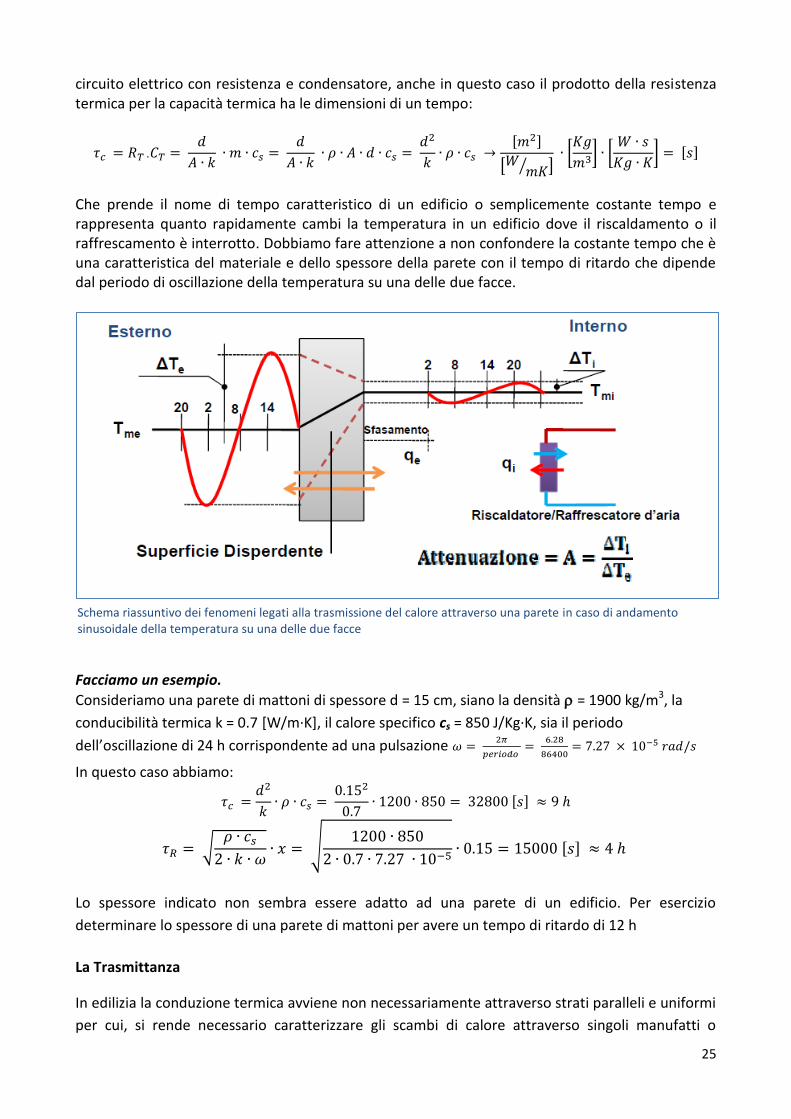
circuito elettrico con resistenza e condensatore, anche in questo caso il prodotto della resistenza termica per la capacità termica ha le dimensioni di un tempo:
𝜏𝑐 = 𝑅𝑇 ∙𝐶𝑇 = 𝑑
𝐴 ∙ 𝑘 ∙ 𝑚 ∙ 𝑐𝑠 =
𝑑
𝐴 ∙ 𝑘 ∙ 𝜌 ∙ 𝐴 ∙ 𝑑 ∙ 𝑐𝑠 =
𝑑2
𝑘∙ 𝜌 ∙ 𝑐𝑠 →
[𝑚2]
[𝑊𝑚𝐾⁄ ]
∙ [𝐾𝑔
𝑚3] ∙ [𝑊 ∙ 𝑠
𝐾𝑔 ∙ 𝐾] = [𝑠]
Che prende il nome di tempo caratteristico di un edificio o semplicemente costante tempo e rappresenta quanto rapidamente cambi la temperatura in un edificio dove il riscaldamento o il raffrescamento è interrotto. Dobbiamo fare attenzione a non confondere la costante tempo che è una caratteristica del materiale e dello spessore della parete con il tempo di ritardo che dipende dal periodo di oscillazione della temperatura su una delle due facce.
Facciamo un esempio.
Consideriamo una parete di mattoni di spessore d = 15 cm, siano la densità = 1900 kg/m3, la
conducibilità termica k = 0.7 [W/m·K], il calore specifico cs = 850 J/Kg·K, sia il periodo
dell’oscillazione di 24 h corrispondente ad una pulsazione 𝜔 = 2𝜋
𝑝𝑒𝑟𝑖𝑜𝑑𝑜 =
6.28
86400= 7.27 × 10−5 𝑟𝑎𝑑/𝑠
In questo caso abbiamo:
𝜏𝑐 =𝑑2
𝑘∙ 𝜌 ∙ 𝑐𝑠 =
0.152
0.7∙ 1200 ∙ 850 = 32800 [𝑠] ≈ 9 ℎ
𝜏𝑅 = √𝜌 ∙ 𝑐𝑠
2 ∙ 𝑘 ∙ 𝜔∙ 𝑥 = √
1200 ∙ 850
2 ∙ 0.7 ∙ 7.27 ∙ 10−5∙ 0.15 = 15000 [𝑠] ≈ 4 ℎ
Lo spessore indicato non sembra essere adatto ad una parete di un edificio. Per esercizio
determinare lo spessore di una parete di mattoni per avere un tempo di ritardo di 12 h
La Trasmittanza
In edilizia la conduzione termica avviene non necessariamente attraverso strati paralleli e uniformi
per cui, si rende necessario caratterizzare gli scambi di calore attraverso singoli manufatti o
Schema riassuntivo dei fenomeni legati alla trasmissione del calore attraverso una parete in caso di andamento sinusoidale della temperatura su una delle due facce

26
porzioni, descrivendo il manufatto per il suo comportamento rispetto alla trasmissione di calore
per unità di superficie. Riprendendo l’equazione di Fourier per uno strato piano, si definisce la
trasmittanza U
∆𝑄
∆𝑡= 𝑘
𝐴
𝑑 ∆𝑇 = 𝑈 ∙ 𝐴 ∙ ∆𝑇
Per cui, in generale, possiamo definire la trasmittanza come 𝑈 = ∆𝑄
∆𝑡⁄
𝐴∙∆𝑇 [
𝑊
𝑚2𝐾] =
𝑘
𝑑. Possiamo
interpretare la trasmittanza come il flusso di calore che attraversa un metro quadrato per ogni
grado di differenza di temperatura. Il prodotto della trasmittanza U per la superficie ci riporta al
reciproco della resistenza termica. A tal fine si veda il seguente documento dell’ENEA
sull’efficienza energetica utilizzato per il calcolo del risparmio energetico ai fini delle detrazioni
fiscali http://efficienzaenergetica.acs.enea.it/tecnici/trasmittanza.pdf
27
GAS PERFETTI Richiami di teoria cinetica dei gas. Un gas ideale è pensabile come un sistema fisico composto da un numero molto grande di
particelle tutte uguali tra loro, approssimabili con delle sfere rigide, che si muovono di moto
rettilineo uniforme, quando urtano le pareti del contenitore non perdono energia (urto elastico),
non si urtano tra loro (o meglio le loro dimensioni sono così piccole per cui possiamo trascurare le
interazioni interne), hanno un andamento disordinato e pertanto la loro densità media è uniforme
all’interno del contenitore. Le particelle, in prima approssimazione non sono soggette alla forza di
gravità né a forze di interazione reciproca.
Riportiamo la celebre dimostrazione di Maxwell sulla relazione tra energia cinetica media e
temperatura (dimostrazione un poco semplificata)
.
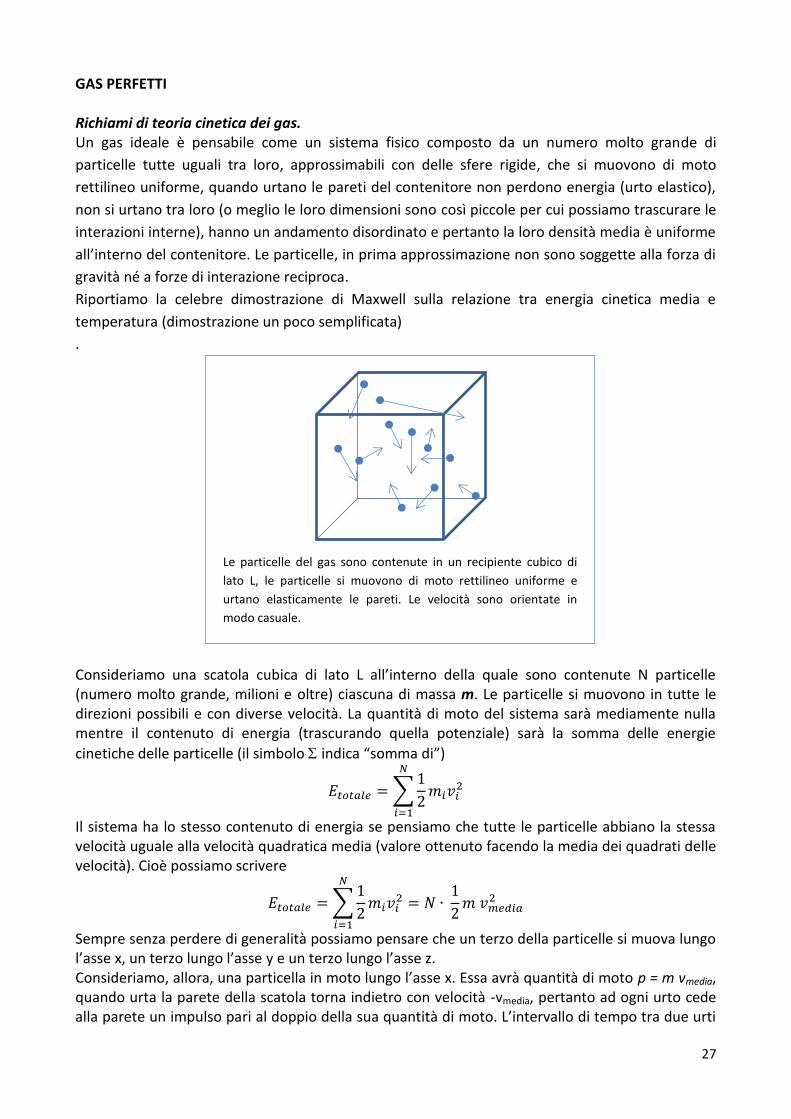
Consideriamo una scatola cubica di lato L all’interno della quale sono contenute N particelle (numero molto grande, milioni e oltre) ciascuna di massa m. Le particelle si muovono in tutte le direzioni possibili e con diverse velocità. La quantità di moto del sistema sarà mediamente nulla mentre il contenuto di energia (trascurando quella potenziale) sarà la somma delle energie
cinetiche delle particelle (il simbolo indica “somma di”)
𝐸𝑡𝑜𝑡𝑎𝑙𝑒 = ∑1
2𝑚𝑖𝑣𝑖
2
𝑁
𝑖=1
Il sistema ha lo stesso contenuto di energia se pensiamo che tutte le particelle abbiano la stessa velocità uguale alla velocità quadratica media (valore ottenuto facendo la media dei quadrati delle velocità). Cioè possiamo scrivere
𝐸𝑡𝑜𝑡𝑎𝑙𝑒 = ∑1
2𝑚𝑖𝑣𝑖
2
𝑁
𝑖=1
= 𝑁 ∙ 1
2𝑚 𝑣𝑚𝑒𝑑𝑖𝑎
2
Sempre senza perdere di generalità possiamo pensare che un terzo della particelle si muova lungo l’asse x, un terzo lungo l’asse y e un terzo lungo l’asse z. Consideriamo, allora, una particella in moto lungo l’asse x. Essa avrà quantità di moto p = m vmedia, quando urta la parete della scatola torna indietro con velocità -vmedia, pertanto ad ogni urto cede alla parete un impulso pari al doppio della sua quantità di moto. L’intervallo di tempo tra due urti
Le particelle del gas sono contenute in un recipiente cubico di
lato L, le particelle si muovono di moto rettilineo uniforme e
urtano elasticamente le pareti. Le velocità sono orientate in
modo casuale.

28
consecutivi sulla stessa parete sarà t = 2L/vmedia, pertanto, usando il teorema dell’impulso, la forza media che le particelle in moto lungo l’asse x (che sono un terzo del totale) esercitano su una parete è
𝐹𝑚𝑒𝑑𝑖𝑎 =𝑁
3 2𝑚𝑣
2𝐿𝑣
= 𝑁
3 𝑚𝑣2
𝐿
Se al posto della forza media sostituiamo la pressione p moltiplicata per l’area L2 di una delle facce otteniamo
𝑝 ∙ 𝐿2 = 𝑁
3 𝑚𝑣2
𝐿 → 𝑝 ∙ 𝐿3 =
2
3 𝑁
1
2 𝑚 𝑣2 → 𝑝 ∙ 𝑉 =
2
3 𝑁
1
2 𝑚 𝑣2 → 𝑝 ∙ 𝑉 =
2
3 𝑁 𝐸𝑐
Dove Ec è l’energia cinetica media della particella. Se confrontiamo l’ultima espressione con la l’equazione di stato dei gas perfetti (scritta nella formulazione con il numero N di particelle e la costante di Boltzmann k)
𝑝 ∙ 𝑉 = 𝑁 ∙ 𝑘 ∙ 𝑇 Otteniamo
𝑁 ∙ 𝑘 ∙ 𝑇 = 2
3 𝑁 𝐸𝑐
Da cui la famosa relazione
𝐸𝑐(𝑚𝑒𝑑𝑖𝑎) = 3
2 ∙ 𝑘 ∙ 𝑇
Con questa dimostrazione Maxwell lega le grandezze come il volume, la pressione e soprattutto la Temperatura con delle grandezze “classiche” come la velocità e la massa, in particolare fissa la relazione già compresa a livello sperimentale che la temperatura sia legata al moto delle particelle, nello specifico all’Energia Cinetica Media. Il valore di questa dimostrazione non è solo didattico, essa fu un importante contributo alla così detta teoria atomica (cioè quella che ai tempi di Maxwell, seconda metà del 19esimo secolo, era solo un modo di pesare alla costituzione della materia come fatta di particelle indivisibili dette atomi) che era in attesa delle conferme che arriveranno negli anni seguenti. E’ utile, per esercizio, stimare la velocità traslazione media che hanno le molecole dei gas a temperatura ambiente secondo la teoria cinetica. Ricordiamo che i gas che compongono l’aria sono in prevalenza molecolari, cioè composti da molecole non semplici (Azoto e Ossigeno che sono biatomici, acqua e anidride carbonica che sono triatomici, solo l’Argo è monoatomico) e che l’energia si ripartisce in energia di traslazione del centro di massa e in energia di rotazione (un po’ come quando si osserva il moto di un bastone). L’equazione di riferimento è
1
2𝑚𝑣2 =
3
2 ∙ 𝑘 ∙ 𝑇
Per cui la velocità sarà
𝑣 = √3 ∙ 𝑘 ∙ 𝑇
𝑚
m è la massa di una singola molecola espressa in kilogrammi e può essere calcolata ricordando che la massa molecolare PM in chimica rappresenta quella quantità espressa in grammi di un sostanza che contiene un numero di Avogadro NA di molecole, pertanto avremo

29
𝑚 = 𝑃𝑀
1000 ∙ 𝑁𝐴
Sostituendo nell’espressione della velocità otteniamo
𝑣 = √3 ∙ 𝑘 ∙ 𝑇
𝑃𝑀
1000 ∙ 𝑁𝐴
= √3000 ∙ 𝑘 ∙ 𝑁𝐴 ∙ 𝑇
𝑃𝑀= √
3000 ∙ 𝑅 ∙ 𝑇
𝑃𝑀
Ora l’espressione della velocità ha una forma un po’ più gestibile, nel caso dell’ossigeno dell’aria O2, abbiamo PM = 32, T = 300 K, quindi
𝑣𝑜𝑠𝑠𝑖𝑔𝑒𝑛𝑜 = √3000 ∙ 𝑅 ∙ 𝑇
𝑃𝑀= √
3000 ∙ 8.3 ∙ 300
32= √233438 ≅ 480 𝑚/𝑠
Una velocità sorprendente, maggiore di quella del suono. Spesso è conveniente esprimere la caratteristiche del gas attraverso la pressione p che il gas esercita sulle pareti del contenitore e il volume V o attraverso la densità, cioè riprendendo l’ultima parte della dimostrazione abbiamo
𝑝 ∙ 𝑉 = 2
3 𝑁
1
2 𝑚 𝑣2 → 𝑣 = √
3 ∙ 𝑝 ∙ 𝑉
𝑁 ∙ 𝑚
Il prodotto N·m è la massa totale del gas, per cui
𝑣 = √3 ∙ 𝑝
𝑁 ∙ 𝑚𝑉
= √3 ∙ 𝑝
𝜌
Dove è la densità del gas espressa in kg/m3. Un gas di ossigeno molecolare che esercitasse la
pressione p = 1 Atm avrebbe densità = 1.43 kg/m3, risulta facile ripetere il calcolo della velocità media. Si tratta della stessa temperatura dell’esempio precedente. La velocità calcolata è quella media (quadratica media, radice della media dei quadrati) però non tutte le molecole avranno la stessa velocità, anzi non è nemmeno detto che la velocità così calcolata sia quella posseduta dal maggior numero di molecole. Infatti è più corretto parlare di “distribuzione di velocità”, Maxwell descrisse anche come le varie velocità fossero distribuite, la sua ipotesi è stata verificata sperimentalmente con un apparato come quello in figura (esperimento di Esterman, Simpson e Stern)
Schema dell'apparto sperimentale usato per misurare la distribuzione delle velocità. Le particelle emesse dal forno F emergono nel tubo solo se hanno velocità orizzontale, proseguono di moto parabolico. La misura di h permette di risalire alla velocità orizzontale.

30
In un apparecchiatura mantenuta sotto alto vuoto un piccolo forno F contiene dei vapori di cesio a temperatura costante T. Le molecole di cesio che escono dal fornetto incontrano due diaframmi
che lasciano passare solo quelle dirette orizzontalmente verso la parete C. A causa della forza di gravità le molecole faranno un moto parabolico (il vuoto spinto garantisce assenza di attrito), con un sensore posto in D e mobile verticalmente di può determinare quante molecole arrivano a ciascuna altezza h che dipende dalla velocità orizzontale e quindi ricostruire la distribuzione delle velocità ad una determinata temperatura T. La legge delle pressioni parziali Una diretta conseguenza della teoria cinetica è la legge delle pressioni parziali di Dalton, formulata
nel 1807 (prima della teoria di Maxwell), afferma che la pressione totale esercitata da una miscela
ideale di gas ideali, è uguale alla somma delle pressioni parziali che sarebbero esercitate dai gas se
fossero presenti da soli in un eguale volume, quindi, la pressione parziale pi di un componente di
una miscela di gas è la pressione che questo avrebbe qualora occupasse, da solo, il volume a
disposizione dell'intera miscela.
Se, ad esempio, in un recipiente di volume V = 1 m3 è contenuta aria secca a pressione
atmosferica, l’azoto contribuirà per il 78% alla pressione (esercitando sulle pareti del contenitore
un pressione pN2 = 0.78x101325 Pa = 79015 Pa), l’ossigeno contribuirà per il 21% (esercitando una
pressione pO2 = 0.21x101300 Pa = 21275 Pa), l’Argon per lo 0.9%. E’ doveroso ricordare che la
pressione esercitata da un gas è proporzionale al numero di molecole, per cui se applicando la
legge delle pressioni si conoscono concentrazioni delle varie specie è bene assicurarsi che esse
siano espresse come frazioni in volume e non in frazioni di massa
Esempio della legge delle pressioni parziali: nel terzo cilindro la pressione è la somma delle pressioni nei primi due
Equazione di Stato dei Gas Perfetti
Distribuzione delle velocità
dell’ossigeno molecolare a tre diverse
temperature: -100 °C, 20 °C, 600 °C.
La velocità quadratica media coincide con
il picco della distribuzione solo ad alte
temperature quando la distribuzione
tende ad essere simmetrica

31
Il gas perfetto in equilibrio è descritto dall’equazione di stato 𝑝𝑉 = 𝑛 𝑅 𝑇, che lega tra loro le tre
variabili di stato P, V e T (Pressione, Volume, Temperatura) mediante il numero di moli n e la
costante R (R è il prodotto di altre due costanti, la costante di Boltzmann k = 1.38x10-23 [J/K] e il
numero di Avogadro NA = 6.022x1023). Se la pressione è espressa in Pascal, la temperatura in gradi
Kelvin e il volume in metri cubi, se n è il numero di moli di gas la costante avremo R = 8.315
[J/K·mole].
Lo studio dei gas ha una grande importanza perché il loro volume può cambiare in modo
importante al variare della temperatura, i gas sono facilmente trasportabili mediante tubi o
condotte. Sono pertanto lo strumento adeguato per recuperare lavoro meccanico (energia
utilizzabile) dal calore che risulta essere energia facile da “produrre” ma spesso utilizzabile e solo
per scambi termici (l’energia non si produce perché si conserva, il termine qui usato “produrre” sta
a significare la facilità con la quale si possono trasformare altri tipi di energia, chimica, potenziale
elettrica etc, in energia termica).
Lo studio dei gas deve quindi essere affrontato insieme alle modificazioni dei parametri p, V, T
(trasformazioni) in relazione agli scambi energetici. Questa parte si chiama termodinamica.
La teoria cinetica dei gas assume un modello di gas perfetto basato, tra le altre, sulle seguenti due
ipotesi:
- Le molecole del gas sono sferette rigide puntiformi
- L’energia di interazione tra le molecole è nulla
Il piano pV
Oltre che alla descrizione di una situazione stabile dei parametri Pressione, Temperatura, Volume,
è importante poter descrivere un gas quando, scambiando calore con l’ambiente, modifica uno o
più parametri. Si dice che il gas subisce una trasformazione. Se la trasformazione avviene
lentamente possiamo ragionevolmente ritenere che l’equazione di stato sia valida durante la
successione temporale della trasformazione, in tal caso si parla di trasformazione reversibile (cioè
che può essere fatta anche al contrario: Es. se facciamo aumentare la pressione di un gas a volume
costante scaldandolo, sarà possibile riportarlo nella condizione inziale raffreddandolo), spesso le
trasformazioni reversibili sono definite con “successione di stati equilibrio”. Lo strumento grafico
per descrivere le trasformazioni reversibili è il piano p-V, dove lo stato di una gas è rappresentato
in un piano cartesiano usando come coordinate la pressione e il volume. Esempio, un
trasformazione di un gas in cui la temperatura resta costante (isoterma), legherà l’espansione del
gas (aumento di volume) alla diminuzione della pressione. Il grafico che ne risulta è un ramo di
iperbole. Al crescere della temperatura il grafico sarà “più lontano” dagli assi come in figura.
32
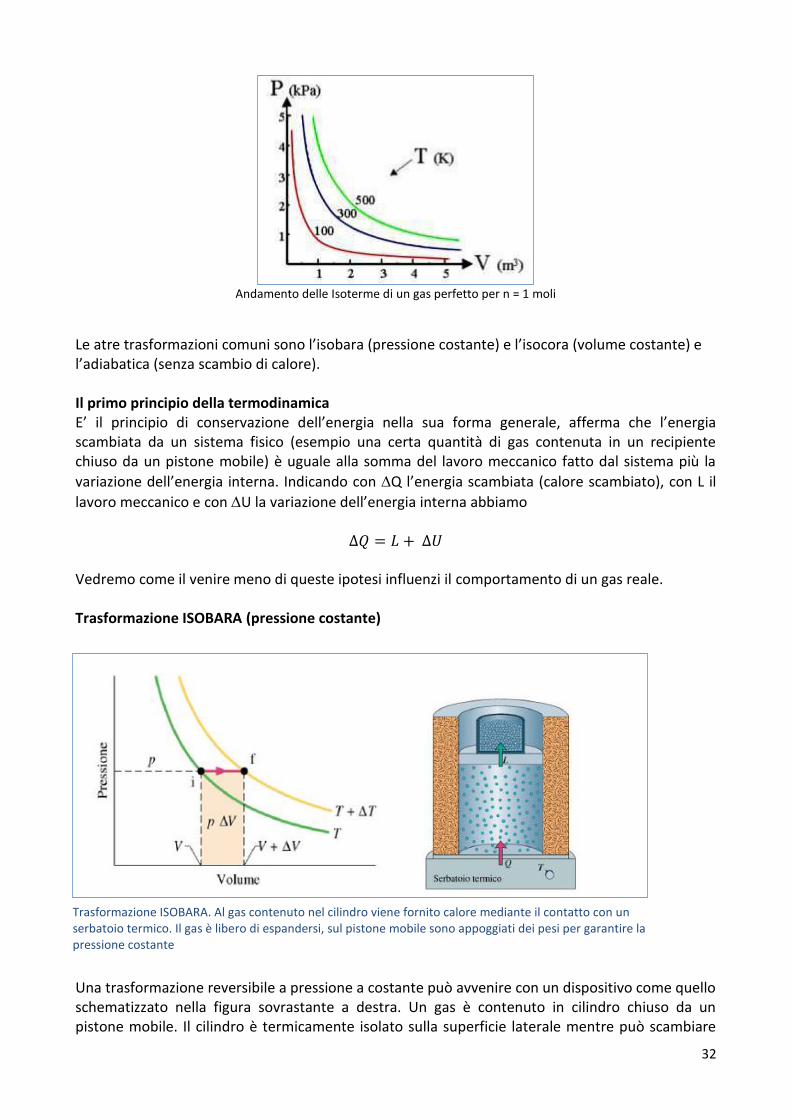
Andamento delle Isoterme di un gas perfetto per n = 1 moli
Le atre trasformazioni comuni sono l’isobara (pressione costante) e l’isocora (volume costante) e l’adiabatica (senza scambio di calore). Il primo principio della termodinamica E’ il principio di conservazione dell’energia nella sua forma generale, afferma che l’energia scambiata da un sistema fisico (esempio una certa quantità di gas contenuta in un recipiente chiuso da un pistone mobile) è uguale alla somma del lavoro meccanico fatto dal sistema più la
variazione dell’energia interna. Indicando con Q l’energia scambiata (calore scambiato), con L il
lavoro meccanico e con U la variazione dell’energia interna abbiamo
∆𝑄 = 𝐿 + ∆𝑈 Vedremo come il venire meno di queste ipotesi influenzi il comportamento di un gas reale. Trasformazione ISOBARA (pressione costante)
Una trasformazione reversibile a pressione a costante può avvenire con un dispositivo come quello schematizzato nella figura sovrastante a destra. Un gas è contenuto in cilindro chiuso da un pistone mobile. Il cilindro è termicamente isolato sulla superficie laterale mentre può scambiare
Trasformazione ISOBARA. Al gas contenuto nel cilindro viene fornito calore mediante il contatto con un serbatoio termico. Il gas è libero di espandersi, sul pistone mobile sono appoggiati dei pesi per garantire la pressione costante

33
calore attraverso la faccia inferiore in contatto con un serbatoio termico a temperatura regolabile. Nello spazio sopra il pistone è praticato il vuoto e la pressione del gas è bilanciata con dei pesi appoggiato sopra il pistone. Pertanto se il gas assorbe calore attraverso la base del cilindro compirà una espansione a pressione costante e contemporaneamente aumenterà di temperatura perché, come si vede nella figura a sinistra, una espansione a pressione costante intercetta linee isoterme a temperatura crescente. Secondo il primo principio avremo
∆𝑄 = 𝐿 + ∆𝑈 = 𝑝∆𝑉 + ∆𝑈(𝑇) Nel caso un gas perfetto monoatomico, come si ricava dalla dimostrazione delle teoria cinetica dei gas, abbiamo
∆𝑄 = 𝐿 + ∆𝑈 = 𝑝(𝑉𝑓 − 𝑉𝑖) + 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
Sostituendo ai volumi finale e iniziale la loro espressione ricavata dall’equazione dei GAS otteniamo
∆𝑄 = 𝐿 + ∆𝑈 = 𝑝(𝑛𝑅𝑇𝑓
𝑝−
𝑛𝑅𝑇𝑖
𝑝) +
3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
Semplificando per p che resta costante abbiamo
∆𝑄 = 𝐿 + ∆𝑈 = 𝑛𝑅(𝑇𝑓 − 𝑇𝑖) + 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
𝐿 = 𝑛𝑅(𝑇𝑓 − 𝑇𝑖) ∆𝑈 = 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖) ∆𝑄 =
5
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
L’ultima espressione, confrontata con l’equazione fondamentale della calorimetria, permette di calcolare il calore specifico di una mole gas che compie una trasformazione a pressione costante, pertanto si ha
∆𝑄 = 𝑚𝑐𝑠∆𝑇 = 5
2𝑛𝑅∆𝑇 𝑐𝑆 = 𝑐𝑝 =
5
2𝑅
In genere si usa quindi definire il calore specifico a pressione costante cp, che risulta essere lo stesso per tutti gas monoatomici se calcolato mediante uno scambio di calore a pressione costante. Osserviamo che il calore specifico come calcolato dall’espressione precedente è diverso dal calore specifico tabulato per i solidi e per i liquidi ed è definito non per l’unità di massa ma per una mole e per questo motivo è chiamato calore specifico molare. Facciamo un esempio: supponiamo di avere n = 41 moli alla temperatura T = 300 K che occupano
un volume V1 = 1 m3 (la pressione che ne risulta è 𝑝 = 𝑛𝑅𝑇𝑉⁄ = 41 ∙ 8.3 ∙ 300 1⁄ = 102000 𝑃𝑎
(circa la pressione atmosferica), questo gas compie una trasformazione isobara fino ad un volume
V2 = 3V1 = 3 m3. Determiniamo il lavoro L fatto dal gas durante l’espansione, la variazione U
dell’energia interna e il calore totale Q assorbito da gas.
𝐿 = 𝑛𝑅(𝑇𝑓 − 𝑇𝑖) = 41 ∙ 8.3 ∙ (900 − 300) = 204180 J
∆𝑈 = 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖) = 1.5 ∙ 41 ∙ 8.3 ∙ (900 − 300) = 306270 J
∆𝑄 =5
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖) = 2.5 ∙ 41 ∙ 8.3 ∙ (900 − 300) = 510450 J
Come osservazione notiamo che il rendimento della trasformazione, inteso come rapporto tra lavoro meccanico e calore assorbito risulta
34
𝜂 = 𝐿
∆𝑄=
𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
52 𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
= 2
5= 0.4 (40%)
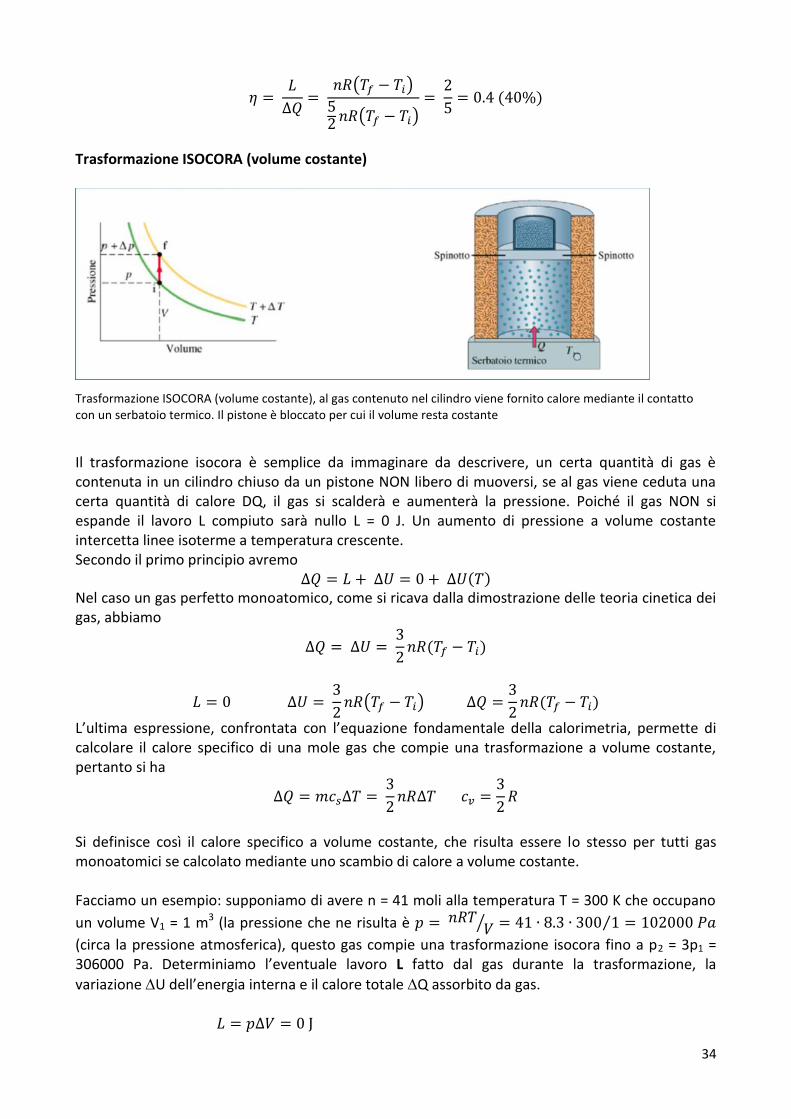
Trasformazione ISOCORA (volume costante)
Trasformazione ISOCORA (volume costante), al gas contenuto nel cilindro viene fornito calore mediante il contatto con un serbatoio termico. Il pistone è bloccato per cui il volume resta costante
Il trasformazione isocora è semplice da immaginare da descrivere, un certa quantità di gas è contenuta in un cilindro chiuso da un pistone NON libero di muoversi, se al gas viene ceduta una certa quantità di calore DQ, il gas si scalderà e aumenterà la pressione. Poiché il gas NON si espande il lavoro L compiuto sarà nullo L = 0 J. Un aumento di pressione a volume costante intercetta linee isoterme a temperatura crescente. Secondo il primo principio avremo
∆𝑄 = 𝐿 + ∆𝑈 = 0 + ∆𝑈(𝑇) Nel caso un gas perfetto monoatomico, come si ricava dalla dimostrazione delle teoria cinetica dei gas, abbiamo
∆𝑄 = ∆𝑈 = 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
𝐿 = 0 ∆𝑈 = 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖) ∆𝑄 =
3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
L’ultima espressione, confrontata con l’equazione fondamentale della calorimetria, permette di calcolare il calore specifico di una mole gas che compie una trasformazione a volume costante, pertanto si ha
∆𝑄 = 𝑚𝑐𝑠∆𝑇 = 3
2𝑛𝑅∆𝑇 𝑐𝑣 =
3
2𝑅
Si definisce così il calore specifico a volume costante, che risulta essere lo stesso per tutti gas monoatomici se calcolato mediante uno scambio di calore a volume costante. Facciamo un esempio: supponiamo di avere n = 41 moli alla temperatura T = 300 K che occupano
un volume V1 = 1 m3 (la pressione che ne risulta è 𝑝 = 𝑛𝑅𝑇𝑉⁄ = 41 ∙ 8.3 ∙ 300 1⁄ = 102000 𝑃𝑎
(circa la pressione atmosferica), questo gas compie una trasformazione isocora fino a p2 = 3p1 = 306000 Pa. Determiniamo l’eventuale lavoro L fatto dal gas durante la trasformazione, la
variazione U dell’energia interna e il calore totale Q assorbito da gas.
𝐿 = 𝑝∆𝑉 = 0 J

35
∆𝑈 = 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖) = 1.5 ∙ 41 ∙ 8.3 ∙ (900 − 300) = 306270 J
∆𝑄 = ∆𝑈 = 306270 J
Come osservazione notiamo che il rendimento della trasformazione, inteso come rapporto tra lavoro meccanico e calore assorbito risulta
𝜂 = 𝐿
∆𝑄=
0
52 𝑛𝑅(𝑇𝑓 − 𝑇𝑖)
= 0
5= 0 (0%)
Trasformazione ISOTERMA (temperatura costante)
Se il gas assorbe lentamente calore attraverso la base del cilindro compirà una espansione a temperatura costante, al crescere del volume essendo costante la temperatura e, quindi, la velocità delle particelle di gas, la pressione diminuirà, come si vede in figura. Secondo il primo principio avremo
∆𝑄 = 𝐿 + ∆𝑈 = 𝑝∆𝑉 + ∆𝑈(𝑇)
Poiché la temperatura non cambia avremo U = 0 mentre per il calcolo del lavoro osserviamo che la pressione diminuisce al crescere del volume. Si può dimostrare (ma la matematica necessaria esula dalle finalità di questo testo) che
∆𝑄 = 𝐿 + ∆𝑈 = 𝑛𝑟𝑇 ln𝑉𝑓
𝑉𝑖+ 0
𝐿 = 𝑛𝑅𝑇 ln𝑉𝑓
𝑉𝑖 ∆𝑈 = 0 ∆𝑄 = 𝑛𝑅𝑇 ln
𝑉𝑓
𝑉𝑖
Facciamo un esempio: supponiamo di avere n = 41 moli alla temperatura T = 300 K che occupano
un volume V1 = 1 m3 (la pressione inziale che ne risulta è 𝑝 = 𝑛𝑅𝑇𝑉⁄ = 41 ∙ 8.3 ∙ 300 1⁄ =
102000 𝑃𝑎, circa la pressione atmosferica), questo gas compie una trasformazione isoterma fino a
V2 = 3V1 = 3 m3. Determiniamo il lavoro L fatto dal gas durante l’espansione, la variazione U
dell’energia interna e il calore totale Q assorbito da gas.
Una trasformazione isoterma
reversibile può essere
ottenuta facendo espandere
lentamente un gas
mantenendo il recipiente in
contatto con un bagno termico
a temperatura costante

36
𝐿 = 𝑛𝑅𝑇 ln𝑉𝑓
𝑉𝑖= 41 ∙ 8.3 ∙ 300 ∙ ln 3 = 112157 J
∆𝑈 = 3
2𝑛𝑅(𝑇𝑓 − 𝑇𝑖) = 0 J
∆𝑄 = 𝑛𝑅𝑇 ln𝑉𝑓
𝑉𝑖= 41 ∙ 8.3 ∙ 300 ∙ ln 3 = 112157 J
Come osservazione notiamo che il rendimento della trasformazione, inteso come rapporto tra lavoro meccanico e calore assorbito risulta
𝜂 = 𝐿
∆𝑄=
𝑛𝑟𝑇 log𝑉𝑓
𝑉𝑖
𝑛𝑟𝑇 log𝑉𝑓
𝑉𝑖
= 1 (100%)
non male se le trasformazioni isoterme fossero semplici da realizzare. Trasformazione ADIABATICA (senza scambio di calore)
Trasformazione ADIABATICA (il gas non scambia calore con l'ambiente esterno) Il cilindro è termicamente isolato. Se la pressione del gas risulta essere maggiore di quella esterna e il pistone è libero di muoversi si avrà una espansione. Il lavoro compiuto porta ad una diminuzione dell’energia interna con conseguente raffreddamento. La trasformazione adiabatica può avvenire nel seguente modo, attraverso una trasformazione isocora si porta un gas ad alta temperatura e alta pressione poi lo si lascia libero di espandersi senza poter scambiare calore, il gas nell’espansione compirà lavoro a spese della propria energia interna con conseguente raffreddamento. Nel piano pV la curva che descrive una trasformazione adiabatica è simile a quella di una isoterma ma più ripida, poiché al crescere del volume la temperatura diminuisce e la curva dell’adiabatica va a intercettare isoterme a temperatura inferiore. Partendo dal primo principio della termodinamica abbiamo
∆𝑄 = 𝐿 + ∆𝑈 = 𝑝∆𝑉 + ∆𝑈(𝑇) = 0
𝑝∆𝑉 = −𝑛𝑐𝑣∆𝑇 Se consideriamo una piccola variazione di stato nell’equazione dei gas avremo
𝑉 ∆𝑝 + 𝑝 ∆𝑉 = 𝑛𝑅 ∆𝑇

37
𝑉 ∆𝑝 = −𝑝∆𝑉 + 𝑛𝑅∆𝑇 = 𝑛𝑐𝑣∆𝑇 + 𝑛𝑅∆𝑇 = (𝑐𝑣 + 𝑅)𝑛∆𝑇 = 𝑐𝑝 𝑛∆𝑇
Dividendo membro a membro otteniamo
𝑉∆𝑝
𝑝∆𝑉= −
𝑛𝑐𝑝∆𝑇
𝑛𝑐𝑣∆𝑇
Semplificando e definendo 𝛾 = 𝑐𝑝 𝑐𝑣⁄ otteniamo
∆𝑝
𝑝= − 𝛾
∆𝑉
𝑉
Simile a quello che otterremmo per una isoterma se non per il fattore (che è maggiore di 1), si può dimostrare che la trasformazione adiabatica è descritta da una relazione del tipo
𝑝𝑉𝛾 = 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒 Il lavoro di una trasformazione adiabatica (il cui calcolo analitico esula dagli obiettivi di questi appunti) può essere espresso nel seguente modo
𝐿 = −1
𝛾 − 1(𝑝𝑓𝑉𝑓 − 𝑝𝑖𝑉𝑖) ∆𝑈 = −𝐿 = 𝑛𝑐𝑣∆𝑇 ∆𝑄 = 0
Come esempio consideriamo il gas monoatomico al termine dell’esempio della trasformazione
isocora: n = 41 moli Vi = 1 m3, pi = 306000 Pa (Ti circa 900 K), lasciamo il gas libero di espandersi in
atmosfera, valutiamo l’espansione fino a quando la pressione del gas non eguaglia quella
atmosferica, ipotizziamo che la trasformazione del gas sia adiabatica reversibile, cerchiamo il
volume finale del gas Vf, la temperatura finale Tf, il lavoro L compiuto dal gas e la variazione di
energia interna.
Come prima cosa determiniamo il volume finale osservando che
𝑝𝑖𝑉𝑖𝛾
= 𝑝𝑓𝑉𝑓𝛾
𝑉𝑓 = √𝑝𝑖𝑉𝑖
𝛾
𝑝𝑓
𝛾
Essendo 𝛾 = 𝑐𝑝 𝑐𝑣⁄ = 2.5𝑅 1.5𝑅 = 1.67⁄ , otteniamo
𝑉𝑓 = 33
5⁄ = 30.6 = 1.93 𝑚3
Il lavoro compiuto dal gas e la conseguente diminuzione di energia interna sarà
𝐿 = −1
𝛾 − 1(𝑝𝑓𝑉𝑓 − 𝑝𝑖𝑉𝑖) = −
1
53 − 1
(102000 ∙ 1.93 − 306000 ∙ 1) = 163710 J
La variazione di temperatura conseguente sarà

38
∆𝑇 = −𝐿
𝑛 𝑐𝑣=
−163710
41 ∙ 1.5 ∙ 8.3 = −320 𝐾
Per cui la temperatura finale del gas Tf sarà Tf = Ti – T = 900 – 320 = 580 K, ben lontana dalla
temperatura di 900 K.
La temperatura finale può essere ricavata anche dall’equazione di stato, avremo cioè
𝑇𝑓 = 𝑝𝑓 𝑉𝑓
𝑛 𝑅=
102000 ∙ 1.93
41 ∙ 8.3 ≅ 580 𝐾
E’ possibile fa compiere trasformazioni adiabatiche con temperatura finale inferiore a quella
ambiente.
39
GAS REALI I gas perfetti sono descritti dall’equazione di stato pV = nRT che lega tra loro le tre variabili di stato pressione, Volume e Temperatura. La teoria cinetica che è stata introdotta all’inizio del capitolo precedente (sui gas perfetti) assume un modello di gas perfetto basato anche sulle seguenti ipotesi:
- le molecole che compongono il gas sono sfere rigide puntiformi (volume = zero) - le molecole non esercitano forze tra loro (energia potenziale di interazione = zero)
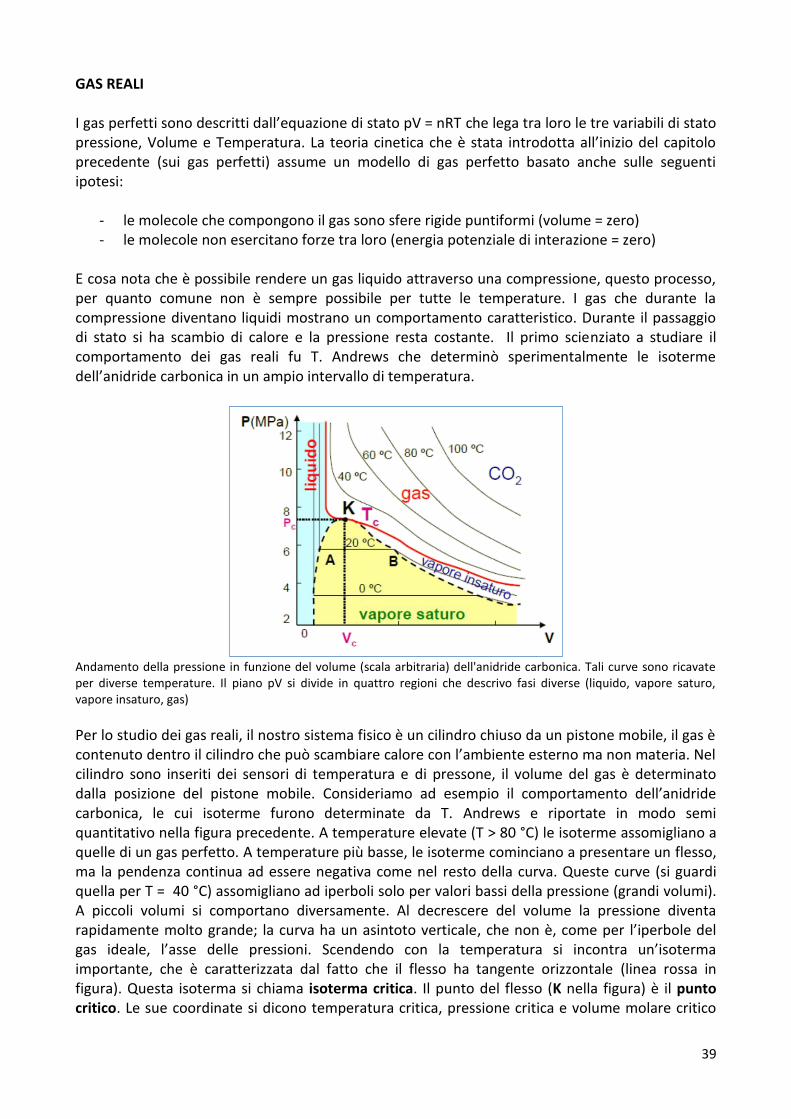
E cosa nota che è possibile rendere un gas liquido attraverso una compressione, questo processo, per quanto comune non è sempre possibile per tutte le temperature. I gas che durante la compressione diventano liquidi mostrano un comportamento caratteristico. Durante il passaggio di stato si ha scambio di calore e la pressione resta costante. Il primo scienziato a studiare il comportamento dei gas reali fu T. Andrews che determinò sperimentalmente le isoterme dell’anidride carbonica in un ampio intervallo di temperatura.
Andamento della pressione in funzione del volume (scala arbitraria) dell'anidride carbonica. Tali curve sono ricavate per diverse temperature. Il piano pV si divide in quattro regioni che descrivo fasi diverse (liquido, vapore saturo, vapore insaturo, gas)
Per lo studio dei gas reali, il nostro sistema fisico è un cilindro chiuso da un pistone mobile, il gas è contenuto dentro il cilindro che può scambiare calore con l’ambiente esterno ma non materia. Nel cilindro sono inseriti dei sensori di temperatura e di pressone, il volume del gas è determinato dalla posizione del pistone mobile. Consideriamo ad esempio il comportamento dell’anidride carbonica, le cui isoterme furono determinate da T. Andrews e riportate in modo semi quantitativo nella figura precedente. A temperature elevate (T > 80 °C) le isoterme assomigliano a quelle di un gas perfetto. A temperature più basse, le isoterme cominciano a presentare un flesso, ma la pendenza continua ad essere negativa come nel resto della curva. Queste curve (si guardi quella per T = 40 °C) assomigliano ad iperboli solo per valori bassi della pressione (grandi volumi). A piccoli volumi si comportano diversamente. Al decrescere del volume la pressione diventa rapidamente molto grande; la curva ha un asintoto verticale, che non è, come per l’iperbole del gas ideale, l’asse delle pressioni. Scendendo con la temperatura si incontra un’isoterma importante, che è caratterizzata dal fatto che il flesso ha tangente orizzontale (linea rossa in figura). Questa isoterma si chiama isoterma critica. Il punto del flesso (K nella figura) è il punto critico. Le sue coordinate si dicono temperatura critica, pressione critica e volume molare critico
40
(nel caso si abbia a che fare con una mole di gas). Per l’anidride carbonica la temperatura critica vale
Tc = 31.04 °C
Scegliamo una temperatura più bassa delle temperatura del punto critico, ad esempio T = 20 °C nel caso dell’anidride carbonica e percorriamo la curva partendo da un volume molto grande (quindi bassa pressione, condizioni simili a quelle dei gas perfetti). Diminuendo il volume si trova che la pressione del gas aumenta, fino a quando esso non raggiunge un valore ben definito (punto B della figura). A questo punto la pressione rimane costante nonostante il volume continui a diminuire. La pressione resta costante durante la compressione fino al punto A. Dopo questo punto la pressione sale bruscamente e diviene impossibile ridurre ulteriormente il volume in maniera apprezzabile. Il gas che a volumi più grandi si lasciava facilmente comprimere è diventato praticamente incomprimibile. Se si abbassa ulteriormente la temperatura del gas e si ripete l’operazione, si constata che il tratto orizzontale a pressione costante è divenuto più ampio. Il tratto si allunga molto dalla parte dei volumi grandi e molto poco dalla parte dei volumi piccoli. Rispetto alla compressione di una gas perfetto le differenze sono legate al tratto di compressione a pressione costante e l’incomprimibilità al di sotto di un certo limite. Per capire dobbiamo chiederci cosa sia successo al gas durante la compressione del tratto AB (isobara e isoterma insieme). Se avessimo potuto guardare dentro il cilindro avremmo notato che nel punto B inizia la liquefazione del gas. Nel tratto AB sono presenti contemporaneamente ed in equilibrio tra loro le due fasi liquide e gassose della sostanza. Ad una data temperatura questo può avvenire ad una sola pressione, chiamata la pressione del “vapor saturo” o tensione di vapore. Si ricava sperimentalmente che la tensione di vapore, nelle sostanze pure, dipende solo dalla temperatura e non dalla quantità di gas utilizzata nell’esperimento, vale a dire non dipende dal volume del gas. La temperatura Tc è la massima temperatura a cui la sostanza può trovarsi nella fase liquida. A temperature maggiori la sostanza si trova esclusivamente nello stato gassoso. Seguendo una terminologia che risale ad Andrews, il termine vapore viene usato per indicare una sostanza che si trova nello stato gassoso, ma che è al di sotto della temperatura critica, ed il termine gas per indicare una sostanza gassosa al di sopra della temperatura critica. Se il vapore non è in contatto con il suo liquido si dice che è insaturo (o surriscaldato). Parametri critici per alcune importanti sostanze.
Gas Temperatura Critica Tc (K)
Pressione Critica Pc (MPa)
Volume Critico (cm3/mole)
Densità Critica (kg/mole)
Elio 5.3 0.23 58 69 Idrogeno 33.3 1.2 64.5 31 Azoto 126.2 3.39 90 311 Argon 150.9 4.91 85.0 531 Ossigeno 154.8 5.08 74.4 430 Metano (CH4) 191 4.64 98.8 162 Etilene (C2H4) 283.1 5.19 124 225 Etano (C2H6) 305.5 4.88 143 211 Anidride Carbonica (CO2) 304.2 8.1 95.6 460 Propano (C3H8) 369.9 4.2 200 220 Ammoniaca (NH3) 405.6 11.4 74.2 400
Rapporto di comprimibilità

41
Se la legge di Boyle valesse rigorosamente anche per un gas reale, avremmo che per qualsiasi gas e per qualsiasi temperatura T, il rapporto di comprimibilità Z derivato dall’equazione di stato, dovrebbe essere uguale ad 1.
𝑍 = 𝑝𝑉
𝑛𝑅𝑇
E’ possibile osservare sperimentalmente che questo valore non è sempre costante e per pressioni dell’ordine di qualche decina di bar può essere inferiore a 1. Questo dato fa pensare che tra le molecole del gas ci sia una qualche interazione (forza attrattiva, energia di interazione che era stata esclusa nel modello dei gas perfetti). Equazione di stato dei GAS REALI J.D. van der Waals nel 1873 cercò di formulare un’equazione di stato che fosse in grado di descrivere il comportamento dei gas reali in un ampio intervallo di pressioni e temperature. Il punto di partenza è l’equazione di stato dei gas perfetti, alla quale si apportano delle modifiche per tener conto del comportamento “reale” delle molecole del gas. Dal comportamento del gas a piccoli volumi, si deduce che l’approssimazione della molecola come una sferetta puntiforme non può essere valida, ma si deve assumere che la molecola abbia un volume finito. Se abbiamo una mole di gas che comprimiamo il più possibile, possiamo assumere che il volume di questo insieme di molecole sia b. Alla quantità b si dà il nome di covolume del gas, inteso come il volume minimo che una mole di gas può assumere. L’equazione di stato può dunque essere scritta come (equazione di stato di Clausius):
𝑝(𝑉 − 𝑛𝑏) = 𝑛 𝑅 𝑇 Il covolume è un parametro caratteristico di ogni gas che va determinato sperimentalmente All’interno del fluido l’attrazione reciproca tra le molecole è mediamente la stessa in tutte le direzioni e quindi il suo effetto complessivo è trascurabile, mentre negli strati in prossimità delle pareti del recipiente non è così perché la compensazione viene a mancare. Quindi per le molecole che sono in prossimità della parete si ha una forza netta diretta verso l’interno che diminuisce la pressione che avrebbe il gas in approssimazione di gas perfetto. Questa forza è proporzionale al numero di molecole che circondano una data molecola vicino alla parete, quindi è proporzionale alla densità del gas.
D’altra parte la pressione è proporzionale al numero di molecole che battono sulla parete e quindi ancora una volta alla densità del gas. In definitiva il termine correttivo della pressione è
Andamento della forza attrattiva lontano dalla parete del contenitore e in prossimità.
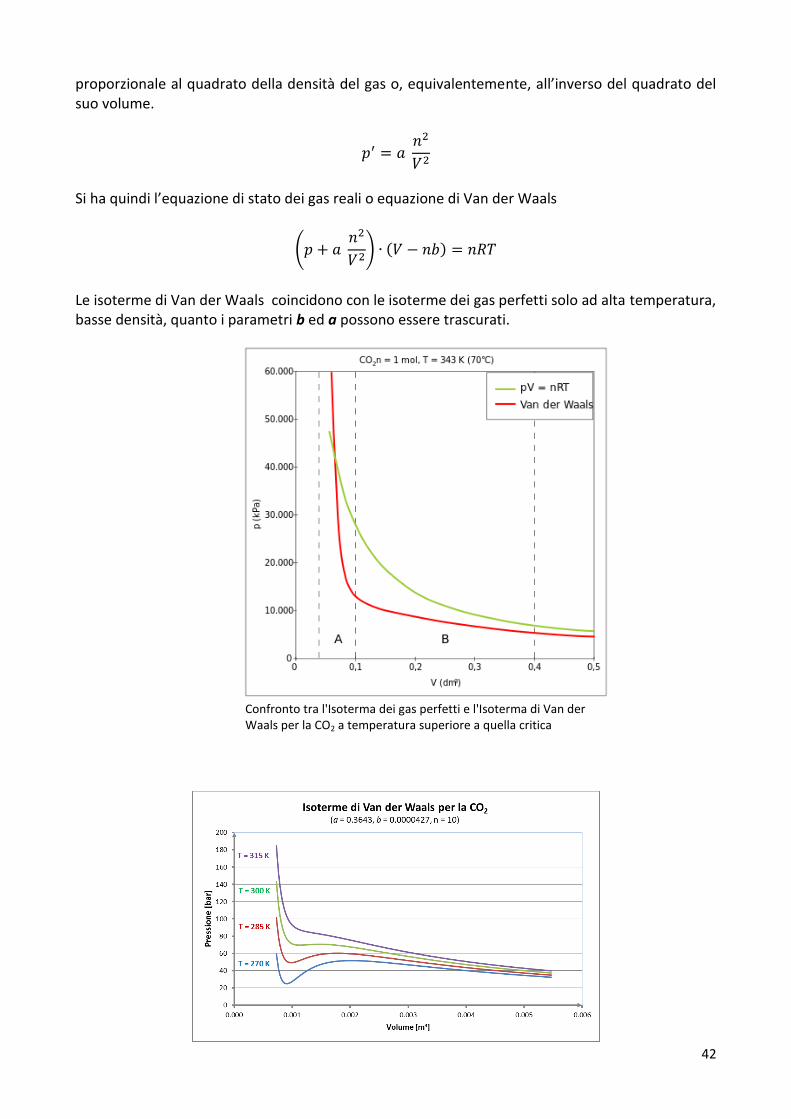
42
proporzionale al quadrato della densità del gas o, equivalentemente, all’inverso del quadrato del suo volume.
𝑝′ = 𝑎 𝑛2
𝑉2
Si ha quindi l’equazione di stato dei gas reali o equazione di Van der Waals
(𝑝 + 𝑎 𝑛2
𝑉2) ∙ (𝑉 − 𝑛𝑏) = 𝑛𝑅𝑇
Le isoterme di Van der Waals coincidono con le isoterme dei gas perfetti solo ad alta temperatura, basse densità, quanto i parametri b ed a possono essere trascurati.
Confronto tra l'Isoterma dei gas perfetti e l'Isoterma di Van der Waals per la CO2 a temperatura superiore a quella critica
43
Isoterme di Van der Waals della CO2 calcolate a quattro temperature. Per le due temperature inferiori a quella critica si osserva l'andamento caratteristico dei gas reali. L’isoterma a T = 315 K ha un andamento somigliante alle isoterme
dei gas perfetti.
Andamento di una isoterma di Van der Waals per temperatura inferiore a quella critica
Per temperature che si avvicinano alla temperatura critica le isoterme hanno un andamento sempre monotono ma mostrano dei flessi. Per temperature inferiori a quella critica (figura precedente) per un tratto importante si discostano dal comportamento dei gas reali. Una volta determinati i parametri a e b è possibile tramite l’equazione di Van der Waals determinare la pressione di vapore saturo imponendo che le aree AcO e OdB siano uguali. Parametri dell'equazione di Van der Waals ricavati sperimentalmente. Con i parametri a e b è possibile risalire alla Temperatura Critica e alla Pressione Critica, così come la pressione di vapor saturo
Sostanza a (J·m3/mole)
b (m3/mole)
Pc (MPa)
Tc (K)
Aria 0.1358 3.64 x 10-5 3.77 133
Anidride Carbonica 0.3643 4.27 x 10-5 7.39 304.2
Azoto 0.1362 3.84 x 10-5 3.39 126.2
Idrogeno 0.0247 2.65 x 10-5 1.30 33.2
Acqua 0.5507 3.04 x 10-5 22.1 647.3
Ammoniaca 0.4233 3.73 x 10-5 11.3 406
Elio 0.0034 2.34 x 10-5 0.23 5.2
Freon 1.0780 9.98 x 10-5 4.12 385
[Costruzione delle le Competenze]
Principio di funzionamento di una pompa di calore (macchina frigorifera)
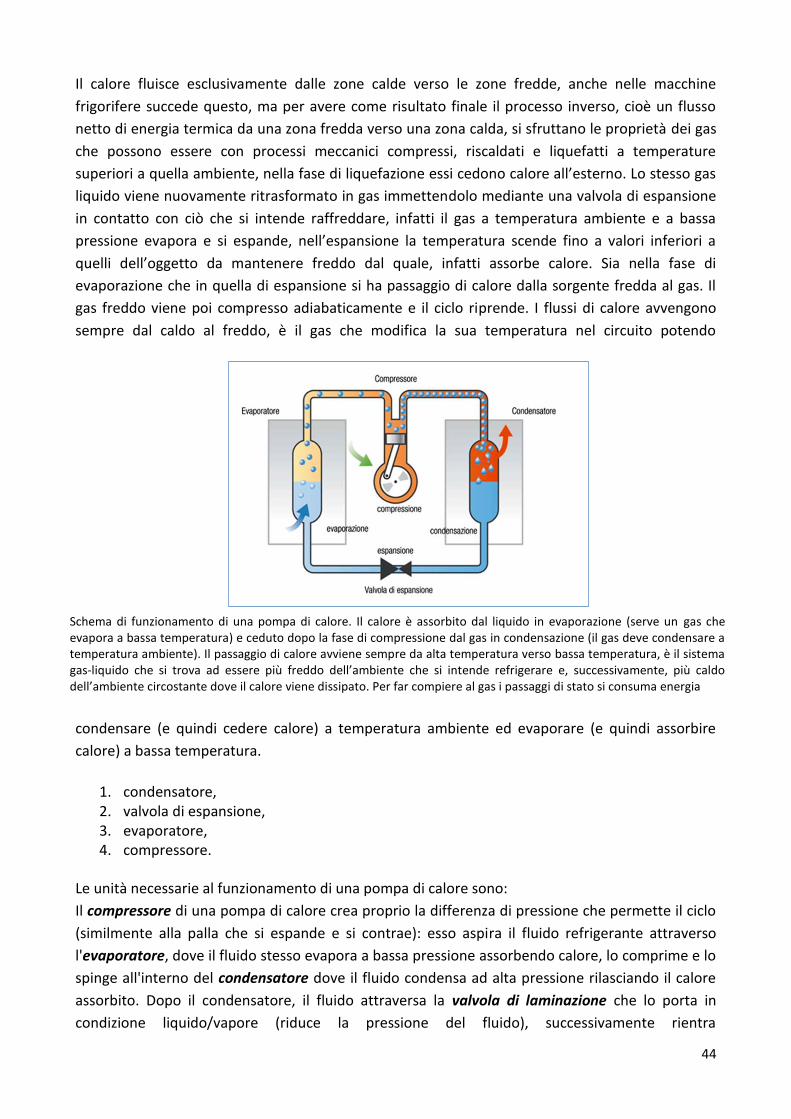
44
Il calore fluisce esclusivamente dalle zone calde verso le zone fredde, anche nelle macchine
frigorifere succede questo, ma per avere come risultato finale il processo inverso, cioè un flusso
netto di energia termica da una zona fredda verso una zona calda, si sfruttano le proprietà dei gas
che possono essere con processi meccanici compressi, riscaldati e liquefatti a temperature
superiori a quella ambiente, nella fase di liquefazione essi cedono calore all’esterno. Lo stesso gas
liquido viene nuovamente ritrasformato in gas immettendolo mediante una valvola di espansione
in contatto con ciò che si intende raffreddare, infatti il gas a temperatura ambiente e a bassa
pressione evapora e si espande, nell’espansione la temperatura scende fino a valori inferiori a
quelli dell’oggetto da mantenere freddo dal quale, infatti assorbe calore. Sia nella fase di
evaporazione che in quella di espansione si ha passaggio di calore dalla sorgente fredda al gas. Il
gas freddo viene poi compresso adiabaticamente e il ciclo riprende. I flussi di calore avvengono
sempre dal caldo al freddo, è il gas che modifica la sua temperatura nel circuito potendo
condensare (e quindi cedere calore) a temperatura ambiente ed evaporare (e quindi assorbire
calore) a bassa temperatura.
1. condensatore, 2. valvola di espansione, 3. evaporatore, 4. compressore.
Le unità necessarie al funzionamento di una pompa di calore sono:
Il compressore di una pompa di calore crea proprio la differenza di pressione che permette il ciclo
(similmente alla palla che si espande e si contrae): esso aspira il fluido refrigerante attraverso
l'evaporatore, dove il fluido stesso evapora a bassa pressione assorbendo calore, lo comprime e lo
spinge all'interno del condensatore dove il fluido condensa ad alta pressione rilasciando il calore
assorbito. Dopo il condensatore, il fluido attraversa la valvola di laminazione che lo porta in
condizione liquido/vapore (riduce la pressione del fluido), successivamente rientra
Schema di funzionamento di una pompa di calore. Il calore è assorbito dal liquido in evaporazione (serve un gas che evapora a bassa temperatura) e ceduto dopo la fase di compressione dal gas in condensazione (il gas deve condensare a temperatura ambiente). Il passaggio di calore avviene sempre da alta temperatura verso bassa temperatura, è il sistema gas-liquido che si trova ad essere più freddo dell’ambiente che si intende refrigerare e, successivamente, più caldo dell’ambiente circostante dove il calore viene dissipato. Per far compiere al gas i passaggi di stato si consuma energia
45
nell'evaporatore ricominciando il ciclo. Il fluido refrigerante cambia di stato all'interno dei due
scambiatori: passa nell'evaporatore da liquido a gassoso, nel condensatore da gassoso a liquido.
Per il funzionamento di una pompa di calore sono fondamentali alcune proprietà dei gas che si
muovono nel circuito. I gas usati in questo tipo di dispositivi sono comunemente chiamati Freon.
Il diclorodifluorometano comunemente noto con il nome di Freon 12 (R12) è un gas incolore alla
temperatura ambiente, è un liquido non tossico, ininfiammabile, incolore, trasparente. Ha stabilità
termiche e chimiche eccellenti. Non corrode i metalli tranne magnesio e la lega del magnesio. Non
si dissolve in acqua, ma può dissolversi facilmente negli idrocarburi. Come refrigerante è
conveniente e sicuro, può essere utilizzato nei vari sistemi di refrigerazione con una gamma di
temperature da -60, º C a 10, º C. Può anche essere utilizzato in questi campi quali l'industria della
spezia, i trattamenti medici e l'industria di plastica.
Formula chimica CCl2F2
Punto di ebollizione (101.3 KPa) -29.8 °C
Temperatura critica 112.2 °C
Pressione critica 4116.2 KPa
Densità liquida 1291.2 Kg/m3
Il Freon 12 fu scoperto da un inventore americano Thomas Midgley nel 1930, con questa
invenzione la refrigerazione domestica è diventata di uso comune. Come si può vedere dalla
tabella e dalla descrizione, il Freon avente una temperatura critica di 112 °C può essere facilmente
liquefatto a temperatura ambiente (pressione critica circa 4 atmosfere) e cosa altrettanto
importante evapora a pressione atmosferica ad una temperatura di – 29 °C (che risulta essere la
temperatura minima ottenibile con frigoriferi a singolo stadio). Anche se i Freon e gli altri
fluorocarburi si sono sempre dimostrati innocui per gli esseri umani, negli settanta sono sorti dei
dubbi circa il loro effetto sull’ozonosfera. Pertanto dopo l’entrata in vigore del protocollo di
Monteral (1987) tale gas non è più stato usato, oggi si usa il gas identificato con la sigla R409 che è
una miscela a base di clorodifluorometano.
La comuni macchine di condizionamento sono caratterizzate per la loro capacità di
raffreddamento o di calore assorbito. L’unità di misura utilizzata è il BTU. Il British Thermal Unit
(BTU o Btu) è un'unità di misura dell'energia, usata negli Stati Uniti e nel Regno Unito (dove è
generalmente usata nei sistemi di riscaldamento). La corrispondente unità di misura utilizzata nel
Sistema Internazionale è, invece, il joule (J). Una BTU è definita dalla quantità di calore richiesta
per alzare la temperatura di 1 libbra (ovvero 453,59237 grammi) di acqua da 39 °F a 40 °F (3.8 °C a
4.4 °C). Esistono diversi tipi di definizioni tecniche della BTU (principalmente dipendenti
dall'applicazione della definizione data a differenti temperature iniziali dell'acqua o a diverse
densità della stessa) che rendono leggermente variabile il corrispondente valore in joule, esistono
- cioè - diverse tipologie di BTU. Le BTU sono solitamente utilizzate nella definizione del potere
calorifico dei combustibili come anche del potere refrigerante dei sistemi di condizionamento degli
ambienti. (conversioni: 1 BTU = 252 cal, 1 BTU = 1,055056 kJ)
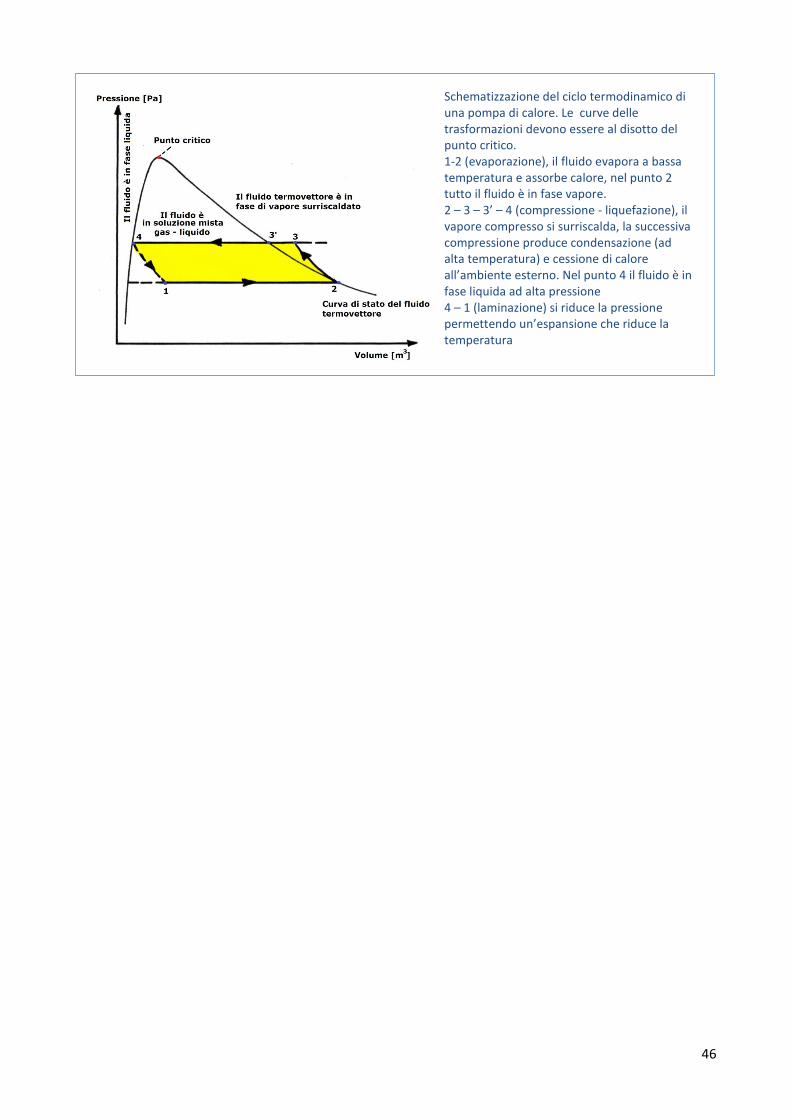
46
Schematizzazione del ciclo termodinamico di una pompa di calore. Le curve delle trasformazioni devono essere al disotto del punto critico. 1-2 (evaporazione), il fluido evapora a bassa temperatura e assorbe calore, nel punto 2 tutto il fluido è in fase vapore. 2 – 3 – 3’ – 4 (compressione - liquefazione), il vapore compresso si surriscalda, la successiva compressione produce condensazione (ad alta temperatura) e cessione di calore all’ambiente esterno. Nel punto 4 il fluido è in fase liquida ad alta pressione 4 – 1 (laminazione) si riduce la pressione permettendo un’espansione che riduce la temperatura
47
Approfondimenti di termodinamica
Entalpia
Con riferimento al primo principio della termodinamica la variazione di energia interna è:
∆U = ∆Q - L in cui:
∆U = variazione di energia interna ∆Q = quantità di calore scambiato con l'ambiente L = lavoro compiuto o subito dal sistema
per le trasformazioni fatte avvenire a pressione costante, il lavoro L può essere calcolato applicando la seguente formula:
L = P · ∆V = P · (V2 - V1)
Pertanto, nel caso di trasformazioni fatte avvenire a pressione costante, secondo il primo principio della termodinamica, la variazione di energia interna di un sistema può essere calcolata con la seguente formula:
∆U = U2 - U1 = ∆Qp - P · (V2 - V1)
in cui:
U2 = energia dello stato finale del sistema U1 = energia dello stato iniziale del sistema ∆Qp = quantità di calore scambiata a pressione costante con l'ambiente V2 = volume finale del sistema V1 = volume iniziale del sistema Ricavando il valore di ∆Qp, si ha:
∆Qp = U2 - U1 + P · V2 - P · V1
ovvero: ∆Qp = (U2 + P · V2) - (U1 + P · V1)
La somma (U + P · V) viene indicata con la lettera H
H = U + P · V
e viene chiamata entalpia o contenuto termico totale di un sistema, in quanto con essa si tiene conto oltre che dell'energia delle particelle che costituiscono il sistema materiale anche dell'energia determinata dalla pressione e dal volume del sistema stesso, la quale viene espressa tramite il prodotto PV che ha le dimensioni di un lavoro (energia).
Possiamo quindi scrivere:
∆Qp = H2 - H1 = ∆H
48
Da questa formula risulta che: durante una trasformazione fatta avvenire a pressione costante la variazione di entalpia del sistema corrisponde al calore scambiato. L'entalpia H è una funzione di stato perché definita come somma di funzione di stato.
Entropia (Storia e definizione)
Il concetto di entropia venne introdotto agli inizi del XIX secolo, nell'ambito della termodinamica, per descrivere una caratteristica (la cui estrema generalità venne osservata per la prima volta da Sadi Carnot nel 1824) di tutti i sistemi allora conosciuti nei quali si osservava che le trasformazioni avvenivano invariabilmente in una direzione sola, ovvero quella verso il massimo disordine.
In particolare la parola entropia venne introdotta per la prima volta da Rudolf Clausius nel suo Abhandlungen über die mechanische Wärmetheorie (Trattato sulla teoria meccanica del calore), pubblicato nel 1864. In tedesco, Entropie, deriva dal greco εν, "dentro", e da τρoπή, "cambiamento", "punto di svolta", "rivolgimento" (sul modello di Energie, "energia"): per Clausius indicava quindi dove va a finire l'energia fornita ad un sistema. Propriamente Clausius intendeva riferirsi al legame tra movimento interno (al corpo o sistema) ed energia interna o calore, legame che esplicitava la grande intuizione del secolo dei Lumi, che in qualche modo il calore dovesse riferirsi al movimento di particelle meccaniche interne al corpo. Egli infatti la definiva come il rapporto tra la somma dei piccoli incrementi (infinitesimi) di calore, divisa per la temperatura assoluta durante l'assorbimento del calore.
Per chiarire maggiormente il concetto di entropia possiamo presentare alcuni esempi:
Si pensi di far cadere una gocciolina d'inchiostro in un bicchiere d'acqua: quello che si osserva immediatamente è che, invece di restare una goccia più o meno separata dal resto dell'ambiente (che sarebbe uno stato completamente ordinato), l'inchiostro inizia a diffondere e, in un certo tempo, si ottiene una miscela uniforme (stato completamente disordinato). É esperienza comune che, mentre questo processo avviene spontaneamente, il processo inverso (separare l'acqua e l'inchiostro) richiederebbe energia esterna.
Immaginiamo un profumo contenuto in una boccetta colma come un insieme di molecole puntiformi dotate di una certa velocità derivante dalla temperatura del profumo. Fino a quando la boccetta è tappata, ossia isolata dal resto dell'universo, le molecole saranno costrette a rimanere all'interno e non avendo spazio (la boccetta è colma) rimarranno abbastanza ordinate (stato liquido). Nel momento in cui la boccetta viene stappata le molecole della superficie del liquido inizieranno a staccarsi dalle altre ed urtando casualmente tra di loro e contro le pareti della boccetta usciranno da questa disperdendosi all'esterno (evaporazione). Dopo un certo tempo tutte le molecole saranno uscite disperdendosi. Anche se casualmente qualche molecola rientrerà nella boccetta il sistema complessivo è ormai disordinato e l'energia termica che ha messo in moto il fenomeno è dispersa e quindi non più recuperabile.
Il concetto di entropia ha conosciuto grandissima popolarità nell'800 e nel '900, grazie proprio alla grande quantità di fenomeni che aiuta a descrivere, fino ad uscire dall'ambito prettamente fisico ed essere adottato anche dalle scienze sociali, nella teoria dei segnali e nell'informatica teorica. È tuttavia bene notare che esiste tutta una classe di fenomeni, detti fenomeni non lineari (ad esempio i fenomeni caotici) per i quali le leggi della termodinamica (e quindi anche l'entropia) devono essere profondamente riviste e non hanno più validità generale. Definizione termodinamica

49
L'entropia S come funzione di stato venne introdotta nel 1864 da Rudolf Clausius nell'ambito della termodinamica come
∆𝑆 = ∆𝑄𝑟𝑒𝑣
𝑇
dove ΔQrev è la quantità di calore assorbito in maniera reversibile dal sistema a temperatura T. ∆S si esprime in unità entropiche (u.e.) la cui unità di misura è: Cal / (mol · K) o J / (mol · K).
Per quanto riguarda l'entropia (S) occorre osservare che contrariamente a quanto avviene per l'entalpia e l'energia libera, essa può essere misurata in assoluto in quanto è pari a zero l'entropia di un cristallo perfetto alla temperatura di zero K (zero assoluto). Pertanto, mentre si è convenuto di porre uguale a zero l'entalpia di formazione degli elementi nei loro stati standard (25°C e 1 atm), l'entropia di formazione per gli stessi è maggiore di zero e ha un valore ben definito. Per una trasformazione chimica, la variazione di entropia viene calcolata nel seguente modo:
∆𝑆 = ∑ 𝑆𝑝𝑟𝑜𝑑𝑜𝑡𝑡𝑖 − ∑ 𝑆𝑟𝑒𝑎𝑔𝑒𝑛𝑡𝑖
Nelle reazioni che avvengono con un aumento del disordine, l'entropia dei prodotti S(prodotti) è maggiore dell'entropia dei reagenti S(reagenti), per cui: ∆S > 0. Nelle reazioni che avvengono con diminuzione del disordine, l'entropia dei prodotti S(prodotti) è minore dell'entropia dei reagenti S(reagenti), per cui: ∆S < 0. Tenendo conto della definizione di entropia, il secondo principio della termodinamica può essere enunciato nel seguente modo: nei processi spontanei di un sistema isolato l'entropia S deve aumentare, cioè ∆S deve essere maggiore di zero (∆S > 0). Energia Libera Tra il 1875 e il 1876, lo statunitense J. W. Gibbs dimostrò inequivocabilmente che l'unico criterio per stabilire la spontaneità di una reazione è la sua capacità di produrre lavoro utile. Ciò significa che se a temperatura e pressione costante una reazione può produrre lavoro utile essa è termodinamicamente consentita, cioè spontanea. Alle stesse conclusioni e indipendentemente giunse, nel 1882, H. Von Helmholtz, il quale affermò che: il verso secondo cui si svolge una reazione e la sua intensità sono determinati non dalle variazioni dell'energia termica totale (entalpia) ma solo da quella parte di essa che può trasformarsi in lavoro o in altre forme di energia che non siano calore. Helmholtz distinse, dunque, l'energia totale posseduta da un sistema in due parti nettamente distinte, che egli chiamò rispettivamente energia libera (che produce lavoro) ed energia vincolata (non produce lavoro; è calore latente):
𝐸𝑛𝑒𝑟𝑔𝑖𝑎 𝑡𝑜𝑡𝑎𝑙𝑒 = 𝐸𝑛𝑒𝑟𝑔𝑖𝑎 𝑙𝑖𝑏𝑒𝑟𝑎 + 𝐸𝑛𝑒𝑟𝑔𝑖𝑎 𝑣𝑖𝑛𝑐𝑜𝑙𝑎𝑡𝑎
L'energia vincolata è data dal prodotto dell'entropia S per la temperatura assoluta T. L'energia totale è l'entalpia H. Indicando con G l'energia libera, si può pertanto scrivere:
𝐻 = 𝐺 + 𝑇 ∙ 𝑆 da cui:
𝐺 = 𝐻 − 𝑇 ∙ 𝑆

50
Nello studio di un sistema o di una reazione ciò che interessa maggiormente è la variazione delle grandezze coinvolte e quindi la variazione dell'energia libera.
Per giungere alla definizione dell'energia libera partiamo dalle seguenti relazioni termodinamiche:
∆𝑈 = ∆𝑄 − 𝐿
∆𝐻 = ∆𝑈 + 𝑝∆𝑉 (𝑝 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒)
∆𝑆 = ∆𝑄𝑟𝑒𝑣
𝑇 (𝑇 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒)
Nella prima equazione al posto di Q sostituiamo quello di Qrev ricavato dalla terza equazione
(Qrev = ∆S · T):
∆𝑈 = 𝑇 ∙ ∆𝑆 − 𝐿𝑟𝑒𝑣
Dalla seconda equazione si ha inoltre che:
∆𝑈 = ∆𝐻 − 𝑝 ∙ ∆𝑉
Uguagliano le ultime due equazioni, si ha:
∆𝐻 − 𝑝 ∙ ∆𝑉 = 𝑇 ∙ ∆𝑆 − 𝐿𝑟𝑒𝑣
cioè anche:
∆𝐻 − 𝑇 ∙ ∆𝑆 = 𝑝 ∙ ∆𝑉 − 𝐿𝑟𝑒𝑣
Questa espressione, considerato che la temperatura è costante, può a sua volta scriversi:
∆(𝐻 − 𝑇 ∙ 𝑆) = 𝑝 ∙ ∆𝑉 − 𝐿𝑟𝑒𝑣
Fu W. Gibbs ad introdurre la funzione
𝐺 = 𝐻 − 𝑇 ∙ 𝑆
che è una funzione di stato perché H, T, S sono funzioni o variabili di stato. La funzione di Gibbs
viene indicata col nome di energia libera.
L'equazione
∆(𝐻 − 𝑇 ∙ 𝑆) = 𝑝 ∙ ∆𝑉 − 𝐿𝑟𝑒𝑣
può quindi anche scriversi
∆𝐺 = 𝑝 ∙ ∆𝑉 − 𝐿𝑟𝑒𝑣
51
espressione valida a P e T costanti.
Variazione energia libera
Si è visto che l'energia libera G è una grandezza termodinamica calcolabile nel seguente modo:
𝐺 = 𝐻 − 𝑇 ∙ 𝑆
Molto più interessante è lo studio della variazione dell'energia libera esprimibile mediante la seguente equazione nota come equazione di Gibbs-Helmholtz:
∆𝐺 = ∆𝐻 − 𝑇 ∙ ∆𝑆
E' dimostrato che: una reazione, a temperatura e pressione costanti, avviene spontaneamente solo se accompagnata da una diminuzione di energia libera. Cioè se:
∆𝐺 = 𝐺(𝑓𝑖𝑛𝑎𝑙𝑒) − 𝐺(𝑖𝑛𝑖𝑧𝑖𝑎𝑙𝑒) < 0
La variazione di energia libera dipende dalla temperatura e dalla pressione. Nelle reazioni chimiche si conviene, in genere, di considerare le sostanze reagenti e i prodotti della reazione alla stessa temperatura e alla pressione di 1 atm, se la reazione avviene in ambiente aperto. In tal caso, ∆G diviene una caratteristica della reazione e si indica con ∆G°.
Energia libera molare di formazione
Così come si possono calcolare le variazioni di entalpia (∆H) associate alle reazioni chimiche in base alle entalpie molari di formazione (∆H°f) dei reagenti e dei prodotti, è altrettanto possibile calcolare le variazioni di energia libera molare di formazione ∆G°f dei reagenti e dei prodotti:
∆𝐺0 = ∑ ∆𝐺𝑓0(𝑝𝑟𝑜𝑑𝑜𝑡𝑡𝑖) − ∑ ∆𝐺𝑓
0(𝑟𝑒𝑎𝑔𝑒𝑛𝑡𝑖)
Il valore positivo o negativo assunto da ∆G° fornisce, come si è detto, un valido criterio per prevedere la spontaneità di una reazione chimica.
Energia libera e lavoro utile
La funzione G, oltre a fornire un valido criterio per stabilire la spontaneità delle trasformazioni, consente anche di prevedere il massimo lavoro che una trasformazione è in grado di produrre.
E' stato dimostrato che la variazione di energia libera ∆G rappresenta il massimo lavoro utile (Lu) che può essere fornito da un sistema nelle trasformazioni che avvengono a temperatura e pressioni costanti:
∆𝑮 = − 𝑳𝒖𝒕𝒊𝒍𝒆
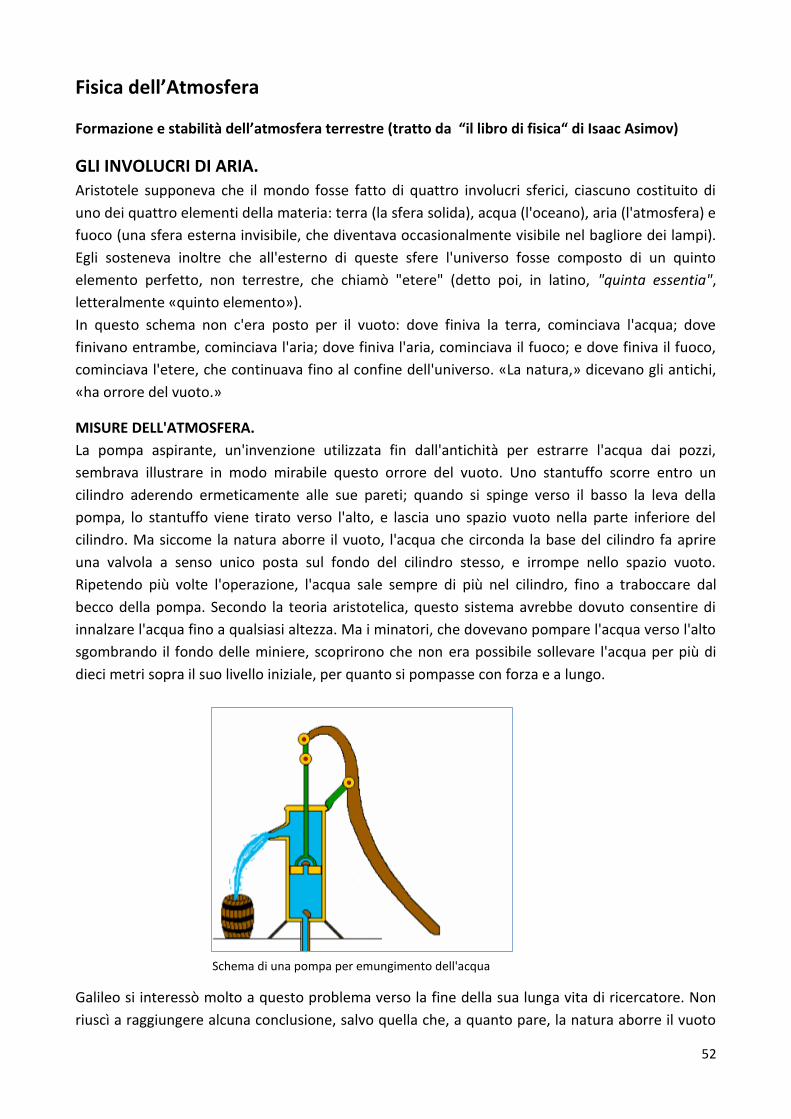
52
Fisica dell’Atmosfera
Formazione e stabilità dell’atmosfera terrestre (tratto da “il libro di fisica“ di Isaac Asimov)
GLI INVOLUCRI DI ARIA.
Aristotele supponeva che il mondo fosse fatto di quattro involucri sferici, ciascuno costituito di
uno dei quattro elementi della materia: terra (la sfera solida), acqua (l'oceano), aria (l'atmosfera) e
fuoco (una sfera esterna invisibile, che diventava occasionalmente visibile nel bagliore dei lampi).
Egli sosteneva inoltre che all'esterno di queste sfere l'universo fosse composto di un quinto
elemento perfetto, non terrestre, che chiamò "etere" (detto poi, in latino, "quinta essentia",
letteralmente «quinto elemento»).
In questo schema non c'era posto per il vuoto: dove finiva la terra, cominciava l'acqua; dove
finivano entrambe, cominciava l'aria; dove finiva l'aria, cominciava il fuoco; e dove finiva il fuoco,
cominciava l'etere, che continuava fino al confine dell'universo. «La natura,» dicevano gli antichi,
«ha orrore del vuoto.»
MISURE DELL'ATMOSFERA.
La pompa aspirante, un'invenzione utilizzata fin dall'antichità per estrarre l'acqua dai pozzi,
sembrava illustrare in modo mirabile questo orrore del vuoto. Uno stantuffo scorre entro un
cilindro aderendo ermeticamente alle sue pareti; quando si spinge verso il basso la leva della
pompa, lo stantuffo viene tirato verso l'alto, e lascia uno spazio vuoto nella parte inferiore del
cilindro. Ma siccome la natura aborre il vuoto, l'acqua che circonda la base del cilindro fa aprire
una valvola a senso unico posta sul fondo del cilindro stesso, e irrompe nello spazio vuoto.
Ripetendo più volte l'operazione, l'acqua sale sempre di più nel cilindro, fino a traboccare dal
becco della pompa. Secondo la teoria aristotelica, questo sistema avrebbe dovuto consentire di
innalzare l'acqua fino a qualsiasi altezza. Ma i minatori, che dovevano pompare l'acqua verso l'alto
sgombrando il fondo delle miniere, scoprirono che non era possibile sollevare l'acqua per più di
dieci metri sopra il suo livello iniziale, per quanto si pompasse con forza e a lungo.
Galileo si interessò molto a questo problema verso la fine della sua lunga vita di ricercatore. Non
riuscì a raggiungere alcuna conclusione, salvo quella che, a quanto pare, la natura aborre il vuoto
Schema di una pompa per emungimento dell'acqua

53
solo fino a un certo limite; egli si chiese se questo limite sarebbe stato inferiore usando un liquido
più denso dell'acqua, ma morì prima di aver potuto effettuare questo esperimento. I suoi discepoli
Evangelista Torricelli e Vincenzo Viviani effettuarono l'esperimento nel 1644. Scelsero il mercurio,
che ha una densità 13,5 volte maggiore di quella dell'acqua, riempirono con tale liquido un tubo di
vetro lungo un metro, tapparono l'estremità aperta del tubo, lo capovolsero in una vaschetta
piena di mercurio e tolsero il tappo. Il mercurio cominciò a defluire dal tubo nella vaschetta, ma,
quando il suo livello raggiunse i 76 centimetri sopra il livello del mercurio nella vaschetta, esso
smise di uscire dal tubo e si arrestò. Era stato così realizzato il primo "barometro"; i moderni
barometri a mercurio non sono sostanzialmente diversi. Non ci volle molto perché si
comprendesse che l'altezza della colonna di mercurio non era sempre identica. Lo scienziato
inglese Robert Hooke osservò, dopo il 1660, che l'altezza della colonna di mercurio diminuiva
prima dei temporali, aprendo così la via alla previsione scientifica del tempo, cioè alla
"meteorologia". Ma che cosa impediva al mercurio di scendere? Viviani ipotizzò che fosse il peso
dell'atmosfera, che premeva sul liquido nella vaschetta. Era un'idea rivoluzionaria, perché secondo
la concezione aristotelica l'aria non aveva peso, essendo attratta solo dalla propria sfera, al di
sopra della terra. Ora, invece, risultava evidente che una colonna di acqua dell'altezza di dieci
metri, o una colonna di mercurio di 76 centimetri, misuravano il peso dell'atmosfera - cioè il peso
di una colonna di aria di pari sezione, che dal livello del mare si elevasse fin dove giunge
l'atmosfera. L'esperimento dimostrava anche che non necessariamente la natura aborre dal vuoto
in tutte le circostanze. Lo spazio che restava nell'estremo chiuso del tubo dopo la caduta del
mercurio era vuoto, non contenendo altro che una quantità piccolissima di vapore di mercurio;
questo "vuoto torricelliano" fu il primo vuoto prodotto artificialmente.
Il vuoto fu messo quasi immediatamente al servizio della scienza. Nel 1650 lo studioso tedesco
Athanasius Kircher dimostrò che il suono non si propaga nel vuoto, confermando, una volta tanto,
un'affermazione di Aristotele. Nel decennio successivo Robert Boyle mostrò che oggetti molto
leggeri cadevano nel vuoto con la stessa velocità degli oggetti pesanti, confermando in tal modo le
teorie di Galileo sul moto (contro quelle di Aristotele). Se l'aria aveva un peso finito, doveva avere
anche un'altezza finita. Risultò che il peso dell'atmosfera era di 1,033 chilogrammi per centimetro
quadrato; in base a questo dato, si poté calcolare che l'atmosfera doveva essere alta solo otto
Esperimento di Boyle - l'aria nel braccio sinistro del tubo è isolata dall'atmosfera con del mercurio. Aggiungendo mercurio nel tubo a destra si può determinare la relazione tra volume e pressione dell'aria rimasta nello spazio di testa del tubo a sinistra

54
chilometri circa – sempre che la sua densità restasse invariata per tutta la sua altezza. Nel 1662,
però, Boyle dimostrò che questo era impossibile, perché la densità dell'aria cresceva con la
pressione. Boyle prese un tubo a forma di J e, tenendolo verticale, versò del mercurio
nell'imboccatura, all'estremità del ramo più lungo; il mercurio intrappolò un po' d'aria
nell'estremo chiuso del ramo corto del tubo; versando altro mercurio, la sacca di aria si
restringeva, e al tempo stesso la sua pressione aumentava, come Boyle dedusse dal fatto che la
contrazione diminuiva via via che aumentava il peso del mercurio. Effettuando misurazioni
accurate, Boyle dimostrò che, riducendo a metà il volume del gas, la sua pressione raddoppiava; in
altre parole, il volume variava in modo inversamente proporzionale alla pressione. Questa storica
scoperta, nota come "legge di Boyle", costituì il primo passo nella lunga serie di scoperte sulla materia, che
finirono per portare alla teoria atomica.
Se l'aria diminuisce di volume per effetto della pressione, deve essere più densa a livello del mare,
rarefacendosi gradualmente al diminuire del peso dell'aria sovrastante, via via che ci si innalza
verso gli strati superiori dell'atmosfera. Questo fatto fu dimostrato per la prima volta nel 1648 dal
matematico francese Blaise Pascal, che fece salire su una montagna alta circa 1500 metri il
cognato Florin Perier, munito di un barometro, perché osservasse di quanto calava il livello del
mercurio al crescere dell'altitudine.
Calcoli teorici mostrarono che, nell'ipotesi di una temperatura costante alle varie quote, la
pressione dell'aria diminuirebbe di dieci volte ogni 20 chilometri di altitudine in più. In altri
termini, a 20 chilometri di quota la colonna di mercurio controbilanciata dall'aria passerebbe da 76
a 7,6 centimetri; a 40 chilometri sarebbe di 0,76 centimetri, a 60 chilometri di 0,076 centimetri, e
così via. A un'altitudine di 180 chilometri, la pressione dell'aria sarebbe pari a soli 0,000000076
centimetri di mercurio. Può sembrare assai poco, ma il peso globale dell'aria al di sopra dei 180
chilometri di altitudine sarebbe ancora di 5,5 milioni di tonnellate. In realtà tutte queste cifre non
sono che approssimazioni, perché la temperatura dell'aria varia con l'altitudine. Tuttavia questi
dati forniscono un'idea generale della situazione, mostrandoci che l'atmosfera non ha un limite
netto, ma si rarefà gradualmente dissolvendosi nel vuoto dello spazio. Scie di meteoriti sono state
osservate perfino alla quota di 160 chilometri, dove l'aria ha una pressione che è solo un
milionesimo di quella che ha alla superficie della terra e una densità che è solo un miliardesimo.
Eppure è quanto basta per portare all'incandescenza questi minuscoli frammenti di materia,
riscaldati dalla resistenza dell'aria. Quanto poi alle aurore boreali, che sono formate da filamenti di
gas resi luminosi dal bombardamento di particelle provenienti dallo spazio esterno, esse vengono
localizzate fra gli 800 e i 1000 chilometri sopra il livello del mare.
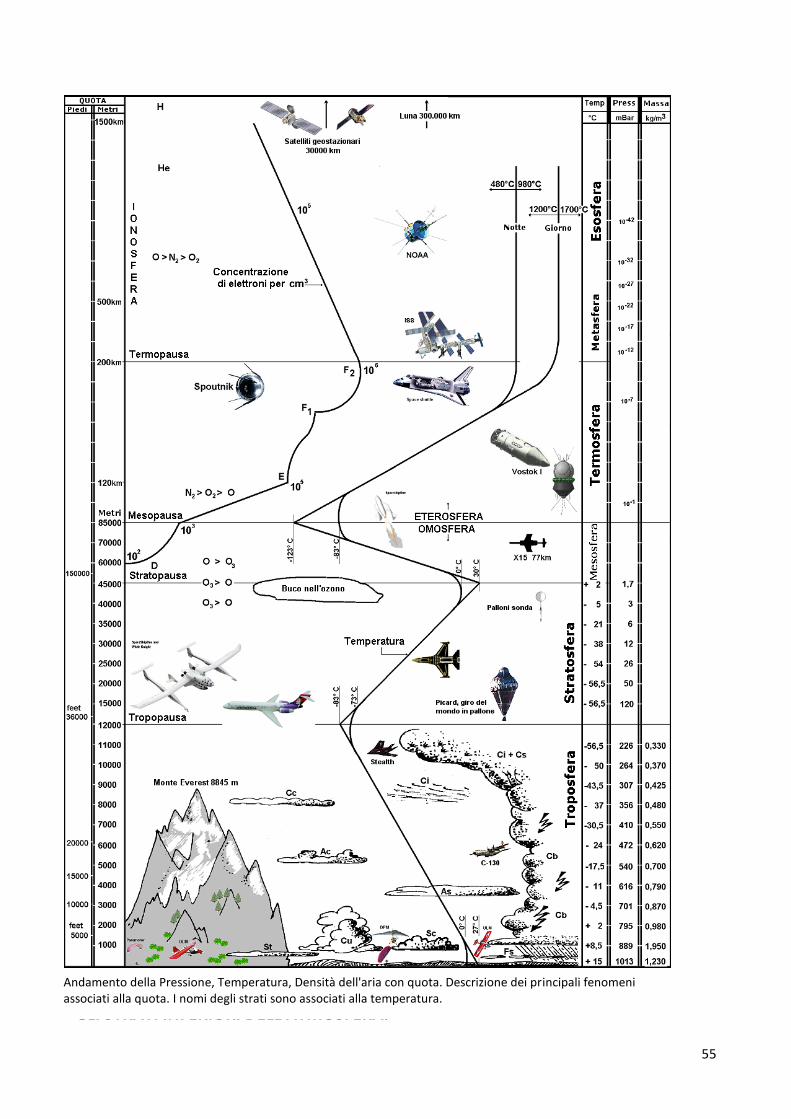
55
GLI STRATI INFERIORI DELL'ATMOSFERA.
Andamento della Pressione, Temperatura, Densità dell'aria con quota. Descrizione dei principali fenomeni associati alla quota. I nomi degli strati sono associati alla temperatura.
56
Prima dell'epoca moderna l'aria era considerata una sostanza semplice e omogenea; all'inizio del
diciassettesimo secolo, il chimico fiammingo Jan Baptista van Helmont cominciò a sospettare che
nell'aria vi fossero vari gas, chimicamente diversi; egli studiò il vapore emesso dalla fermentazione
del succo di frutta ("anidride carbonica"), riconoscendovi una nuova sostanza. Van Helmont fu, in
effetti, il primo a usare il termine "gas": si suppone che egli abbia coniato questa parola, nel 1620
circa, rifacendosi al termine greco "chaos", che indicava la sostanza originaria con cui è stato fatto
l'universo.
Nel 1756 il chimico scozzese Joseph Black studiò a fondo l'anidride carbonica, stabilendo in modo
preciso che si trattava di un gas diverso dall'aria, e dimostrando inoltre che ne esisteva nell'aria
una modesta quantità. Dieci anni dopo Henry Cavendish studiò un gas infiammabile che non si
trovava nell'atmosfera, a cui poi venne dato il nome di "idrogeno"; in tal modo era chiaramente
dimostrata l'esistenza di più gas distinti tra loro. Il primo a comprendere che l'aria era una miscela
di vari gas fu il chimico francese Antoine- Laurent Lavoisier, negli anni successivi al 1770. In uno dei
suoi esperimenti egli scoprì che, riscaldando in un recipiente chiuso una certa quantità di
mercurio, essa si combinava con parte dell'aria, formando una polvere rossa ("ossido mercurico"),
mentre i quattro quinti dell'aria rimanevano sotto forma gassosa. Per quanto si seguitasse a
riscaldare, il volume di questo gas residuo non diminuiva; inoltre, una candela introdotta in tale
gas non bruciava e un topo non riusciva a sopravvivervi. Lavoisier ne concluse che l'aria era
costituita da due gas. La quinta parte che, nel suo esperimento, si combinava con il mercurio era la
componente dell'aria che sosteneva la vita e consentiva la combustione, ed egli la denominò
"ossigeno", mentre chiamò la parte residua "azoto", termine che in greco significa «senza vita».
Quest'ultimo fu chiamato, in diverse lingue, anche "nitrogeno", perché era presente nel nitrato di
sodio, detto comunemente "nitro". Entrambi i gas erano stati scoperti nel decennio precedente,
l'azoto nel 1772 dal medico scozzese Daniel Rutherford e l'ossigeno nel 1774 dal ministro della
Chiesa unitaria inglese Joseph Priestley. Già questo basta a dimostrare che l'atmosfera terrestre è
unica nel sistema solare; oltre alla terra, sette mondi del sistema solare hanno un'atmosfera
significativa, per quanto se ne sa. Giove, Saturno, Urano e Nettuno (i primi due certamente, gli
ultimi due probabilmente) hanno un'atmosfera di idrogeno, con la presenza di piccole quantità di
elio; Marte e Venere hanno atmosfere di anidride carbonica, con azoto come costituente
secondario; Titano ha un'atmosfera di azoto con una scarsa presenza di metano; è solo la terra ad
avere un'atmosfera costituita da due gas in parti quasi uguali, e solo sulla terra l'ossigeno è un
componente importante: l'ossigeno è un gas attivo, così che, in base a semplici considerazioni di
carattere chimico, ci si aspetterebbe che si combini con altri elementi, scomparendo
dall'atmosfera in quanto gas libero.
Verso la metà del diciannovesimo secolo il chimico francese Henri Victor Regnault aveva analizzato
campioni di aria provenienti dalle più svariate parti del mondo e aveva scoperto che la
composizione dell'aria era uguale ovunque: il contenuto di ossigeno era del 20,9 %, e si supponeva
che tutto il resto fosse azoto, salvo una piccola traccia di anidride carbonica. L'azoto è un gas
relativamente inerte, non si combina cioè facilmente con altre sostanze; tale combinazione può
però venir provocata: per esempio, riscaldandolo con magnesio metallico, si ottiene "nitruro di
magnesio" solido. Alcuni anni dopo la scoperta di Lavoisier, Henry Cavendish cercò di eliminare
tutto l'azoto, combinandolo con l'ossigeno sotto l'azione di una scarica elettrica, ma senza
57
successo. Pur provando in tutti i modi, non riusciva a liberarsi di una bollicina di gas residuo, meno
dell'uno per cento della quantità originaria. Cavendish pensò che potesse trattarsi di un gas
sconosciuto, ancora più inerte dell'azoto. Ma non tutti i chimici sono dei Cavendish, così che
nessuno si occupò più dell'enigma e la natura di questo residuo non fu chiarita per un altro secolo.
Nel 1882 il fisico inglese Robert John Strutt, Lord Rayleigh, confrontò la densità dell'azoto ottenuto
dall'aria con la densità dell'azoto ottenuto da determinate altre sostanze chimiche, e scoprì, con
grande sorpresa, che quello proveniente dall'aria era decisamente più denso. Poteva forse darsi
che l'azoto ottenuto dall'aria non fosse puro, ma contenesse piccole quantità di un altro gas più
pesante? Un chimico scozzese, Sir William Ramsay, aiutò Lord Rayleigh a andare più a fondo nella
faccenda, cosa che i due fecero ricorrendo all'aiuto della spettroscopia. Quando riscaldarono il
piccolo residuo di gas rimasto dopo l'eliminazione dell'azoto dall'aria e ne esaminarono lo spettro,
trovarono una nuova serie di righe luminose, che non appartenevano ad alcun elemento noto. Essi
diedero il nome di "argo" (in greco «inerte») all'elemento appena scoperto, che era appunto
altamente inerte. L'argo rendeva ragione di quasi tutto quell'uno per cento di gas ignoto presente
nell'aria; nell'atmosfera c'erano però anche tracce di diversi altri costituenti, ciascuno nella
proporzione di qualche parte per milione. Durante gli anni successivi al 1890 Ramsay proseguì
nelle sue ricerche e scoprì altri quattro gas inerti: il "neon" («nuovo»), il "cripto" («nascosto»), lo
"xeno" («straniero») e l'"elio", che era stato identificato più di trent'anni prima nel sole. In epoca
più recente lo spettroscopio per infrarosso ha rivelato la presenza di altri tre gas: il "protossido di
azoto" (detto «gas esilarante»), di provenienza sconosciuta, il "metano", un prodotto della
decomposizione delle sostanze organiche e il "monossido di carbonio". Il metano proviene dalle
esalazioni delle paludi; si è inoltre calcolato che ogni anno vengono immessi nell'atmosfera circa
40 milioni di tonnellate di questa sostanza, derivanti dalla emissione di gas intestinali da parte di
bovini e altri animali di grosse dimensioni; il monossido di carbonio, probabilmente, è dovuto alle
attività umane, provenendo dalla combustione incompleta di legno, carbone, benzina e altre
sostanze simili.
L'ATMOSFERA: COME SI È FORMATA E COME È STATA TRATTENUTA DALLA TERRA.
Prima di chiederci come si sia formata l'atmosfera della terra, sarà forse meglio discutere come
abbia fatto l'aria a restare attaccata alla terra per tutti gli eoni in cui si è protratto il «balletto» del
nostro pianeta nello spazio. Per rispondere dobbiamo chiamare in causa il concetto di "velocità di
fuga".
LA VELOCITÀ DI FUGA.
Quando lanciamo un oggetto verso l'alto dalla superficie terrestre, l'attrazione gravitazionale lo
rallenta gradualmente finché, dopo un istantaneo arresto, esso inizia a ricadere verso la terra. Se
la forza di gravità restasse uguale a tutte le altitudini, la quota raggiunta dall'oggetto sarebbe
proporzionale al quadrato della sua velocità ascendente iniziale; un oggetto lanciato alla velocità
di 2 chilometri all'ora dovrebbe raggiungere un'altezza quadrupla di un altro lanciato alla velocità
di 1 chilometro all'ora (l'energia cresce cioè con il quadrato della velocità). Ma la forza di gravità
non si mantiene costante: diminuisce lentamente con l'aumentare dell'altezza (per l'esattezza,
diminuisce in modo inversamente proporzionale al quadrato della distanza dal centro della terra).
Supponiamo di lanciare un oggetto verso l'alto con la velocità di un chilometro al secondo; esso
raggiungerà un'altezza di circa 50 chilometri prima di invertire la sua marcia e ricadere (se
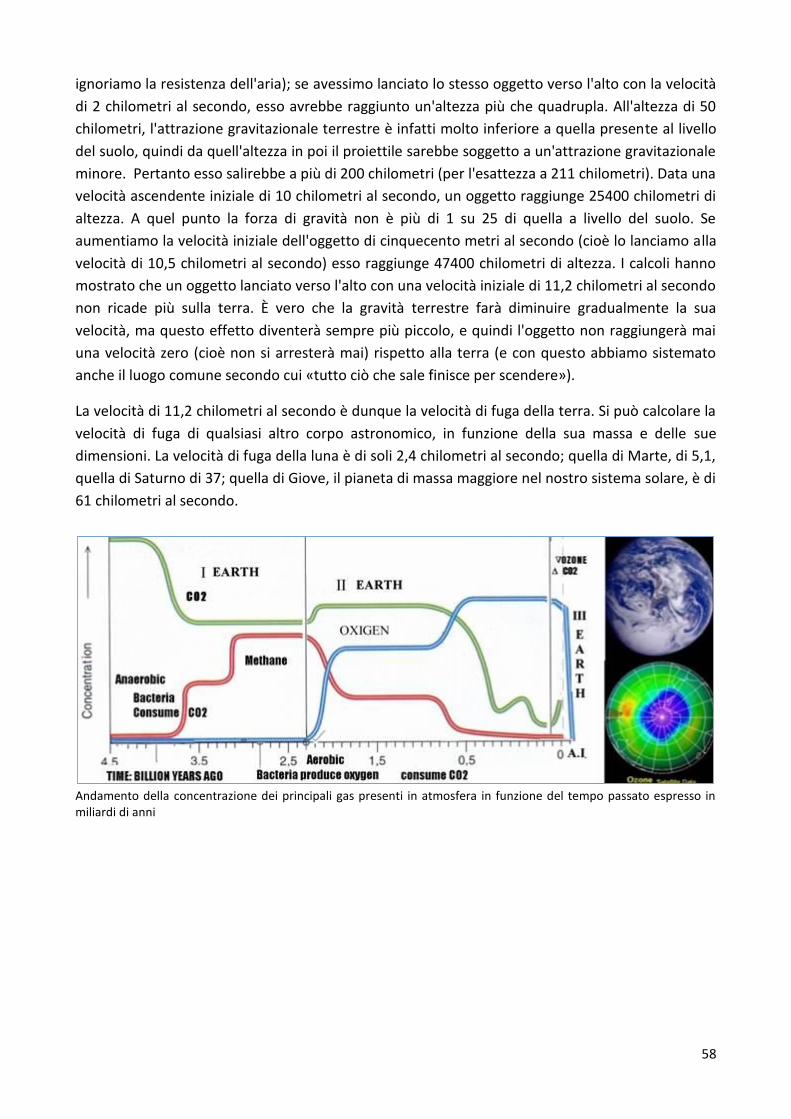
58
ignoriamo la resistenza dell'aria); se avessimo lanciato lo stesso oggetto verso l'alto con la velocità
di 2 chilometri al secondo, esso avrebbe raggiunto un'altezza più che quadrupla. All'altezza di 50
chilometri, l'attrazione gravitazionale terrestre è infatti molto inferiore a quella presente al livello
del suolo, quindi da quell'altezza in poi il proiettile sarebbe soggetto a un'attrazione gravitazionale
minore. Pertanto esso salirebbe a più di 200 chilometri (per l'esattezza a 211 chilometri). Data una
velocità ascendente iniziale di 10 chilometri al secondo, un oggetto raggiunge 25400 chilometri di
altezza. A quel punto la forza di gravità non è più di 1 su 25 di quella a livello del suolo. Se
aumentiamo la velocità iniziale dell'oggetto di cinquecento metri al secondo (cioè lo lanciamo alla
velocità di 10,5 chilometri al secondo) esso raggiunge 47400 chilometri di altezza. I calcoli hanno
mostrato che un oggetto lanciato verso l'alto con una velocità iniziale di 11,2 chilometri al secondo
non ricade più sulla terra. È vero che la gravità terrestre farà diminuire gradualmente la sua
velocità, ma questo effetto diventerà sempre più piccolo, e quindi l'oggetto non raggiungerà mai
una velocità zero (cioè non si arresterà mai) rispetto alla terra (e con questo abbiamo sistemato
anche il luogo comune secondo cui «tutto ciò che sale finisce per scendere»).
La velocità di 11,2 chilometri al secondo è dunque la velocità di fuga della terra. Si può calcolare la
velocità di fuga di qualsiasi altro corpo astronomico, in funzione della sua massa e delle sue
dimensioni. La velocità di fuga della luna è di soli 2,4 chilometri al secondo; quella di Marte, di 5,1,
quella di Saturno di 37; quella di Giove, il pianeta di massa maggiore nel nostro sistema solare, è di
61 chilometri al secondo.
Andamento della concentrazione dei principali gas presenti in atmosfera in funzione del tempo passato espresso in miliardi di anni

59
Tutto ciò ha un rapporto diretto con la capacità della terra di trattenere la sua atmosfera. Gli
atomi e le molecole dell'aria si muovono incessantemente in tutte le direzioni, come se fossero
minuscoli missili. Le loro velocità individuali variano moltissimo: noi siamo in grado di parlarne solo
da un punto di vista statistico, per esempio dicendo qual è la frazione di molecole la cui velocità
supera un dato valore, o qual è la velocità media delle molecole in determinate condizioni.
La formula per esprimere questi valori fu elaborata per la prima volta nel 1860 da James Clerk
Maxwell e dal fisico austriaco Ludwig Boltzmann, e viene chiamata "legge di Maxwell- Boltzmann".
La velocità media delle molecole di ossigeno dell'aria, a temperatura ambiente, è di circa 500
metri al secondo. La molecola dell'idrogeno, che pesa un sedicesimo di quella dell'ossigeno, si
muove con una velocità media quadrupla (circa 2000 metri al secondo), perché, secondo la legge
di Maxwell-Boltzmann, la velocità di una data particella a una data temperatura è inversamente
proporzionale alla radice quadrata del suo peso molecolare.
È importante ricordare che stiamo parlando di velocità medie: una metà delle molecole ha infatti
una velocità superiore alla media, una certa percentuale ha una velocità che supera il doppio della
velocità media, una percentuale ancora minore supera il triplo della velocità media, e così via. Una
minima percentuale delle molecole di ossigeno e di idrogeno dell'atmosfera ha una velocità
superiore alla velocità di fuga, cioè a 11,2 chilometri al secondo. Dagli strati inferiori dell'atmosfera
𝐸𝑝(𝑟 > 𝑅𝑇) = −𝐺𝑀𝑇𝑚
𝑟
𝐸𝑚𝑒𝑐𝑐𝑎𝑛𝑖𝑐𝑎 = 𝐸𝑐 + 𝐸𝑝 = 1
2 𝑚 𝑣𝑓𝑢𝑔𝑎
2 − 𝐺𝑀𝑇 𝑚
𝑅𝑇= 0
𝑣𝑓𝑢𝑔𝑎 = √2 𝐺 𝑀𝑇
𝑅𝑇
Calcolo della velocità di fuga
Per stimare la velocità minima che deve avere un corpo per sfuggire all’attrazione terrestre usiamo un
semplice modello basato sulla conservazione dell’energia meccanica (e sull’assenza di attrito).
Ricordiamo che l’energia potenziale gravitazionale di massa m con distanza r dal centro della terra
maggiore del raggio della terra, ha la seguente espressione:
Questa espressione ci dice che a una distanza infinita l’energia potenziale è nulla (poiché è nulla la
forza di attrazione), se poniamo a zero l’energia meccanica totale di in corpo (somma dell’energia
potenziale e cinetica), essendo l’energia cinetica sempre positiva, risulta che l’energia potenziale
gravitazionale è negativa. Questa convenzione permette alcune semplici interpretazioni: un corpo in
un campo gravitazionale con energia totale positiva farà un moto aperto, cioè non resterà legato alla
sorgente del campo gravitazionale (se siamo sulla terra diremmo che non ricade), mentre un corpo con
energia totale negativa non potrà sfuggire alla forza di attrazione.
Per calcolare la velocità minima che deve avere un corpo sulla superficie della terra per sfuggire al
campo gravitazionale sarà sufficiente imporre che l’energia meccanica totale sia nulla.
Ricordando che il raggio della terra RT = 6350 km, che la massa della terra MT = 6.0x1024 kg e che la
costante di gravitazione universale G = 6,67 x 10-11 (Nm2/kg2), otteniamo
𝑣𝑓𝑢𝑔𝑎 = √2 𝐺 𝑀𝑇
𝑅𝑇 = √
2× 6.67×10−11 6.0×1024
6.35×106 = √12.6 × 107 = 11.2 × 103 (𝑚
𝑠)
Cioè 11.2 km/s, che tradotti fanno circa 40000 km/h.
60
queste particelle più veloci non riescono a fuggire, perché vengono rallentate dagli urti con le altre
particelle, più lente di loro. Ma negli strati superiori hanno molta più probabilità di riuscire a
fuggire: in primo luogo, lassù la radiazione solare, non incontrando ostacoli, ne eccita una porzione
maggiore, impartendo loro elevate energie e alte velocità; in secondo luogo, le collisioni sono
molto meno probabili in quell'aria rarefatta. Mentre una molecola vicina alla superficie terrestre
viaggia solo per un decimillesimo di millimetro (in media) prima di avere una collisione con una sua
vicina, all'altezza di 100 chilometri il suo cammino libero medio è di 10 centimetri e alla quota di
225 chilometri supera i mille metri. A quest'ultima altezza il numero medio di collisioni subite da
un atomo o da una molecola è solo di una al secondo, contro i 5 miliardi al secondo al livello del
mare. Pertanto, una particella veloce all'altezza di 160 chilometri e oltre ha buone probabilità di
sfuggire alla terra; se per caso si sposta verso l'alto, passa in regioni di densità ancora minore,
dove la probabilità di subire collisioni sarà ancora più piccola, così che, alla fine, potrà prendere il
volo per gli spazi interplanetari, per non far ritorno mai più. In altri termini, l'atmosfera terrestre
«perde». La perdita, però, riguarda prevalentemente le molecole più leggere. L'ossigeno e l'azoto
sono relativamente pesanti, così che solo pochissime delle loro molecole riescono a raggiungere la
velocità di fuga; quindi, da quando ossigeno e azoto si sono formati, la terra ha perso una quantità
minima dei due gas. Invece, l'idrogeno e l'elio raggiungono facilmente la velocità di fuga; di
conseguenza oggi l'atmosfera terrestre non contiene più quantità significative di questi ultimi due
gas. I pianeti dotati di massa maggiore, come Giove e Saturno, possono trattenere anche
l'idrogeno e l'elio; pertanto essi hanno atmosfere di grande spessore, composte soprattutto di tali
elementi (i quali, dopo tutto, sono le sostanze più comuni nell'universo). L'idrogeno, presente in
grandi quantità, reagisce con gli altri elementi, e quindi il carbonio, l'azoto e l'ossigeno sono
presenti solo sotto forma di composti contenenti l'idrogeno: rispettivamente metano (CH4),
ammoniaca (NH3) e acqua (H2O). L'ammoniaca e il metano, benché presenti nell'atmosfera di
Giove solo come impurità in concentrazioni relativamente modeste, sono stati osservati (per la
prima volta nel 1931, dall'astronomo tedesco-americano Rupert Wildt) perché producono bande
di assorbimento spettrali osservabili, a differenza dell'elio e dell'idrogeno che non ne producono.
La presenza di questi ultimi due elementi è stata accertata con metodi indiretti nel 1952, e
naturalmente confermata in seguito, dal 1973 in poi, dalle sonde passate vicino a Giove.
All'opposto, un pianeta di piccole dimensioni, come Marte, è scarsamente in grado di trattenere
perfino le molecole relativamente pesanti, e la sua densità atmosferica è solo un centesimo di
quella terrestre. La luna, poi, con la sua velocità di fuga ancora minore, non può trattenere alcun
tipo di atmosfera, ed è quindi priva di aria. La temperatura è un fattore altrettanto importante
della gravità. Secondo l'equazione di Maxwell-Boltzmann, la velocità media delle particelle è
proporzionale alla radice quadrata della temperatura assoluta. Se la terra avesse la temperatura
della superficie del sole, tutti gli atomi e le molecole della sua atmosfera verrebbero accelerati fra
quattro e cinque volte, ed essa non riuscirebbe a trattenere l'ossigeno e l'azoto più di quanto oggi
succeda con l'elio e l'idrogeno. Così, Mercurio, pur avendo una gravità alla superficie 2,2 volte
maggiore di quella della luna, a causa della sua temperatura considerevolmente più elevata di
quella del nostro satellite, non riesce a trattenere meglio la sua atmosfera ed è anch'esso privo di
aria. La gravità sulla superficie di Marte è solo di poco superiore a quella di Mercurio; ma, essendo
Marte considerevolmente più freddo di Mercurio (e anche della terra e della luna), esso riesce ad
avere una tenue atmosfera, in virtù più della sua bassa temperatura che della sua gravità alla
61
superficie, non troppo elevata. I satelliti di Giove sono ancora più freddi di Marte, ma hanno anche
una gravità superficiale dell'ordine di grandezza di quella della luna; pertanto non trattengono
un'atmosfera. Titano, il grande satellite di Saturno, è invece tanto freddo da riuscire a trattenere
una spessa atmosfera di azoto. E forse lo stesso vale per Tritone, il grande satellite di Nettuno.
L'ATMOSFERA ORIGINARIA.
Il fatto che la terra possieda un'atmosfera è un serio argomento contro la teoria che essa e gli altri
pianeti del sistema solare abbiano avuto origine da un evento catastrofico, come una quasi-
collisione tra il sole e un'altra stella; tale fatto depone piuttosto a favore della teoria della nube di
polvere e dei planetesimali. Quando polvere e gas della nube si condensarono dando origine ai
planetesimali, e questi, a loro volta, si aggregavano formando un corpo planetario, può darsi che
parte del gas sia rimasta imprigionata entro una massa porosa, come accade all'aria in un cumulo
di neve; in seguito, la contrazione della massa per effetto della gravità avrebbe «spremuto» i gas,
portandoli in superficie. Un dato gas sarebbe stato trattenuto o meno dalla terra anche a seconda
della sua reattività chimica. L'elio e il neon, pur essendo stati sicuramente tra i gas più comuni
nella nube originaria, sono così inerti dal punto di vista chimico da non formare alcun composto, e
sarebbero quindi sfuggiti sotto forma di gas in breve tempo. È questa la ragione per cui le
concentrazioni di elio e di neon sulla terra non sono che frazioni insignificanti delle rispettive
concentrazioni nell'universo in generale. Per esempio, si è calcolato che la terra abbia trattenuto
soltanto un atomo di neon ogni 50 miliardi presenti nella nube originaria. Quanto all'elio
originario, la nostra atmosfera ne ha conservato ancora meno, anzi forse non ne ha conservato
affatto. Se è vero infatti che oggi la nostra atmosfera contiene un po' di elio, è anche vero che esso
potrebbe essere stato prodotto dalla disintegrazione di elementi radioattivi o essere sfuggito da
cavità nel sottosuolo in cui era rimasto intrappolato. L'idrogeno, invece, anche se più leggero
dell'elio o del neon, è stato trattenuto più efficacemente, perché si è combinato con altre
sostanze, soprattutto con l'ossigeno, formando acqua. Si stima che la terra conservi ancora un
atomo di idrogeno ogni 5 milioni di quelli presenti nella nube originaria. Il caso dell'azoto e
dell'ossigeno illustra ancora meglio l'importanza della reattività chimica: nonostante il fatto che la
massa delle molecole di azoto non sia molto diversa da quella delle molecole di ossigeno, la terra
ha trattenuto 1 atomo di ossigeno su 6 originari, essendo l'ossigeno altamente reattivo, mentre ha
trattenuto 1 atomo di azoto su 800 mila, essendo l'azoto elemento inerte.
Quando parliamo dei gas presenti nell'atmosfera, dobbiamo prendere in considerazione anche il
vapore acqueo; e qui ci imbattiamo nell'interessante problema dell'origine degli oceani. Nelle
prime fasi della storia della terra, per quanto allora il nostro pianeta fosse solo moderatamente
caldo, tutta l'acqua doveva trovarsi sotto forma di vapore. Alcuni geologi ritengono che in seguito
l'acqua si sia concentrata nell'atmosfera formando una densa nube di vapore, e che, dopo il
raffreddamento della terra, si sia riversata a torrenti su quest'ultima, formando gli oceani. Altri
geologi, invece, sostengono che gli oceani si sono formati soprattutto con l'acqua che filtrava
dall'interno della terra alla superficie. I vulcani mostrano che esiste ancora una gran quantità di
acqua nella crosta terrestre, perché i gas da essi liberati sono in prevalenza vapor d'acqua. Se così
stanno le cose, gli oceani sono forse ancora in fase di accrescimento, anche se lento. Ma
l'atmosfera terrestre è stata sempre così com'è oggi, fin dalla sua formazione? Ciò appare poco
probabile. In primo luogo l'ossigeno molecolare, che costituisce un quinto del volume
62
dell'atmosfera, è una sostanza così attiva che è estremamente improbabile che esista in forma
libera, a meno che venga prodotto in continuazione; in secondo luogo, nessun altro pianeta ha
un'atmosfera che somigli anche lontanamente alla nostra, così che si è fortemente tentati di
concludere che l'atmosfera terrestre sia l'effetto di eventi unici (come, per esempio, la presenza
della vita, che manca sugli altri pianeti).
Harold Urey ha sostenuto, con dovizia di argomenti, la tesi che l'atmosfera originaria fosse
composta di ammoniaca e metano. Gli elementi più diffusi nell'universo sono idrogeno, elio,
carbonio, azoto e ossigeno, con l'idrogeno di gran lunga preponderante. In tali condizioni, il
carbonio avrebbe avuto un'alta probabilità di combinarsi con l'idrogeno, formando metano (CH4),
l'azoto avrebbe formato ammoniaca (NH3) e l'ossigeno acqua (H2O). L'elio e l'idrogeno in eccesso
naturalmente sarebbero sfuggiti dall'atmosfera; l'acqua avrebbe formato gli oceani, mentre il
metano e l'ammoniaca, gas relativamente pesanti, sarebbero stati trattenuti dalla gravità
terrestre, venendo così a costituire la porzione preponderante dell'atmosfera. Ammesso che tutti i
pianeti dotati di una gravità sufficiente a trattenere un'atmosfera abbiano avuto all'inizio
un'atmosfera di questo tipo, non tutti però l'avrebbero conservata senza mutamenti. Sarebbe
intervenuta a modificare le cose la radiazione solare ultravioletta: i mutamenti sarebbero stati
minimi per i pianeti esterni, i quali, innanzitutto, ricevono relativamente poca radiazione data la
loro distanza dal sole, e, in secondo luogo, possiedono atmosfere molto spesse, capaci di assorbire
considerevoli quantità di radiazione senza subire modificazioni sostanziali; pertanto i pianeti
esterni avrebbero conservato fino ai nostri tempi le loro atmosfere di idrogeno, elio, ammoniaca e
metano. Ben diversamente sarebbero andate le cose per i cinque mondi interni, Marte, la terra, la
luna, Venere e Mercurio. Di essi, la luna e Mercurio sono troppo piccoli e troppo caldi per
trattenere una vera e propria atmosfera. Restano Marte, la terra e Venere, con tenui atmosfere
formate prevalentemente, all'inizio, di ammoniaca, metano e acqua. Cosa sarebbe accaduto
allora? La radiazione ultravioletta, colpendo le molecole di acqua negli strati superiori
dell'atmosfera primordiale della terra, ne avrebbe provocato la dissociazione in idrogeno e
ossigeno ("fotodissociazione"). L'idrogeno sarebbe sfuggito dall'atmosfera, mentre l'ossigeno
sarebbe rimasto. Essendo però altamente reattive, le sue molecole si sarebbero combinate
praticamente con tutti i tipi di molecole con cui fossero entrate in contatto: avrebbero reagito con
il metano (CH4), formando anidride carbonica (CO2) e acqua (H2O); con l'ammoniaca (NH3),
formando azoto (N2) più acqua (H2O). Molto lentamente, ma con un processo continuo, la
composizione dell'atmosfera si sarebbe convertita da metano e ammoniaca in azoto e anidride
carbonica. L'azoto avrebbe manifestato la tendenza a reagire lentamente con i minerali della
crosta terrestre formando dei nitrati, e l'anidride carbonica sarebbe rimasta la componente
principale dell'atmosfera. A questo punto c'è da attendersi che l'acqua continui a subire la
fotodissociazione e l'ossigeno ad accumularsi nell'atmosfera, mentre l'idrogeno sfugge nello spazio
esterno? E se l'ossigeno che seguita ad accumularsi non trova niente con cui reagire (non potendo
più reagire con l'anidride carbonica), non c'è forse da attendersi che all'anidride carbonica
presente nell'atmosfera si aggiunga una certa percentuale di ossigeno molecolare (il che
spiegherebbe la presenza di ossigeno nell'atmosfera terrestre)? La risposta è un secco no, le cose
non possono essere andate così. Quando l'anidride carbonica diventa la componente dominante
dell'atmosfera, la radiazione ultravioletta non provoca più cambiamenti tramite la dissociazione
63
delle molecole di acqua. Non appena comincia ad accumularsi ossigeno libero, nell'atmosfera
superiore si forma un sottile strato di ozono, che assorbe l'ultravioletto, impedendogli di
raggiungere gli strati inferiori dell'atmosfera e bloccando la fotodissociazione. Un'atmosfera di
anidride carbonica è stabile. Ma l'anidride carbonica induce l'effetto serra. Se l'atmosfera di
anidride carbonica è sottile e relativamente lontana dal sole, e se l'acqua presente è poca, l'effetto
è piccolo, come, per esempio, nel caso di Marte. Si supponga, invece, che l'atmosfera di un pianeta
sia abbastanza simile a quella della terra e che esso si trovi altrettanto (o più) vicino al sole. In tal
caso, l'effetto serra sarebbe enorme: le temperature salirebbero, causando l'evaporazione degli
oceani a ritmo sempre maggiore. L'effetto serra verrebbe accentuato dal vapor d'acqua, e il
processo di trasformazione sarebbe accelerato sia con l'aumento della quantità di anidride
carbonica presente nell'aria, sia attraverso gli effetti della temperatura sulla crosta. Alla fine, il
pianeta sarebbe caldissimo, tutta la sua acqua sarebbe passata nell'atmosfera sotto forma di
vapore, che ne nasconderebbe per sempre la superficie sotto una coltre di nubi eterne, ed esso
sarebbe caratterizzato da una spessa atmosfera di anidride carbonica. Questo è esattamente
quanto è accaduto a Venere, che ha dovuto subire un effetto serra accelerato. Quel poco di calore
in più che riceveva per il fatto di essere più vicina della terra al sole ha innescato tutto quanto il
processo. La terra non ha seguito né l'evoluzione di Marte né quella di Venere. Il contenuto di
azoto della sua atmosfera non è penetrato nella crosta, lasciando un sottile e freddo vento di
anidride carbonica, come su Marte; e neppure è accaduto che l'effetto serra trasformasse il
pianeta in un mondo soffocante, desertico, caldissimo, come è avvenuto su Venere. È successo
qualcosa di diverso, e questo qualcosa è stato l'evolversi della vita, forse fin da quando l'atmosfera
era ancora nello stadio ammoniaca/metano. Le reazioni indotte dalla vita negli oceani terrestri
hanno causato la dissociazione dei composti azotati, liberando azoto molecolare; era così
assicurata la permanenza nell'atmosfera di una grande quantità di questo gas. In più, le cellule
hanno sviluppato la capacità di dissociare le molecole di acqua in idrogeno e ossigeno, usando
l'energia della luce visibile, che non viene bloccata dall'ozono.
L'idrogeno si è combinato con l'anidride carbonica formando le complesse molecole che
costituiscono la cellula, mentre l'ossigeno veniva liberato nell'atmosfera. È stato così, grazie alla
vita, che l'atmosfera della terra si è trasformata da un'atmosfera di azoto e anidride carbonica in
un'altra di azoto e ossigeno. L'effetto serra ha subìto una forte riduzione: la terra è rimasta fresca,
capace di conservare il suo bene unico, un oceano di acqua liquida e un'atmosfera ricca di
ossigeno libero. In realtà, la nostra atmosfera ricca di ossigeno potrebbe essere una caratteristica
solo dell'ultimo 10 per cento della durata dell'esistenza della terra; anche solo 600 milioni di anni
fa, può darsi che l'atmosfera contenesse soltanto un decimo dell'ossigeno che contiene oggi. In
ogni caso è a quest'atmosfera ricca di ossigeno libero, così com'è oggi, che dobbiamo la vita nostra
e degli altri viventi; e quest'atmosfera a sua volta deve la propria esistenza ad altri, più antichi
esseri viventi.
(fine dell’estratto dal libro di Asimov)
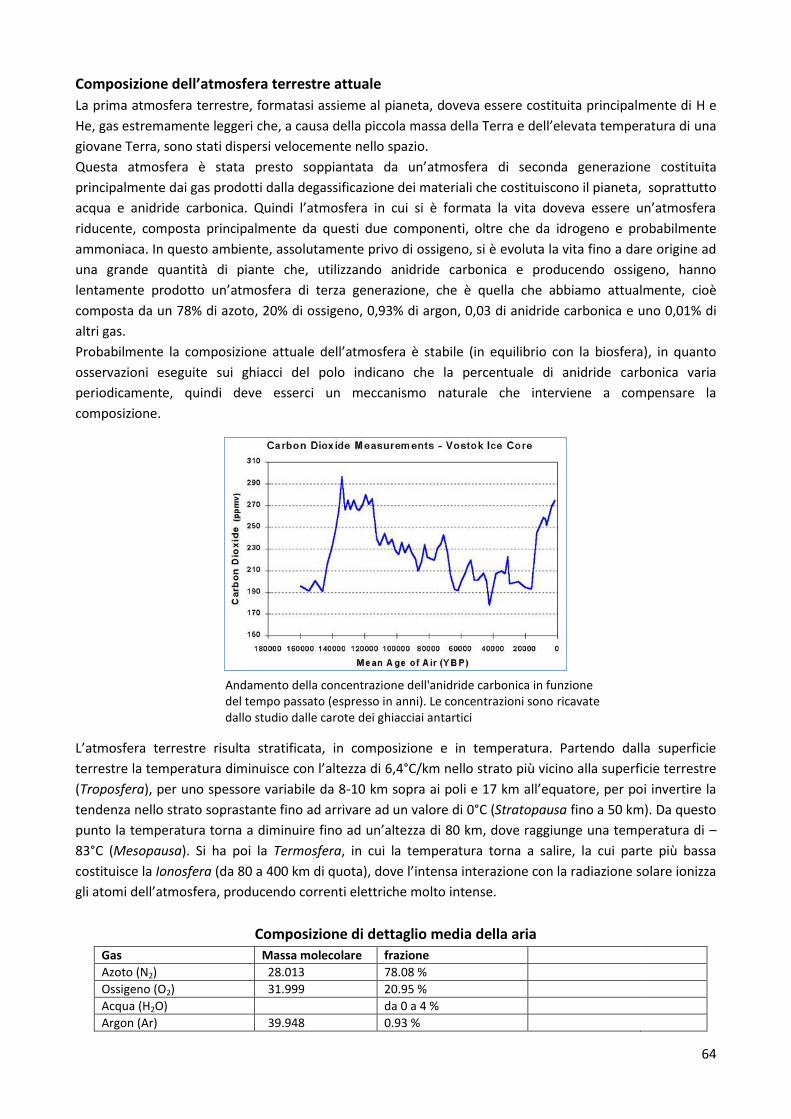
64
Composizione dell’atmosfera terrestre attuale
La prima atmosfera terrestre, formatasi assieme al pianeta, doveva essere costituita principalmente di H e
He, gas estremamente leggeri che, a causa della piccola massa della Terra e dell’elevata temperatura di una
giovane Terra, sono stati dispersi velocemente nello spazio.
Questa atmosfera è stata presto soppiantata da un’atmosfera di seconda generazione costituita
principalmente dai gas prodotti dalla degassificazione dei materiali che costituiscono il pianeta, soprattutto
acqua e anidride carbonica. Quindi l’atmosfera in cui si è formata la vita doveva essere un’atmosfera
riducente, composta principalmente da questi due componenti, oltre che da idrogeno e probabilmente
ammoniaca. In questo ambiente, assolutamente privo di ossigeno, si è evoluta la vita fino a dare origine ad
una grande quantità di piante che, utilizzando anidride carbonica e producendo ossigeno, hanno
lentamente prodotto un’atmosfera di terza generazione, che è quella che abbiamo attualmente, cioè
composta da un 78% di azoto, 20% di ossigeno, 0,93% di argon, 0,03 di anidride carbonica e uno 0,01% di
altri gas.
Probabilmente la composizione attuale dell’atmosfera è stabile (in equilibrio con la biosfera), in quanto
osservazioni eseguite sui ghiacci del polo indicano che la percentuale di anidride carbonica varia
periodicamente, quindi deve esserci un meccanismo naturale che interviene a compensare la
composizione.
L’atmosfera terrestre risulta stratificata, in composizione e in temperatura. Partendo dalla superficie
terrestre la temperatura diminuisce con l’altezza di 6,4°C/km nello strato più vicino alla superficie terrestre
(Troposfera), per uno spessore variabile da 8-10 km sopra ai poli e 17 km all’equatore, per poi invertire la
tendenza nello strato soprastante fino ad arrivare ad un valore di 0°C (Stratopausa fino a 50 km). Da questo
punto la temperatura torna a diminuire fino ad un’altezza di 80 km, dove raggiunge una temperatura di –
83°C (Mesopausa). Si ha poi la Termosfera, in cui la temperatura torna a salire, la cui parte più bassa
costituisce la Ionosfera (da 80 a 400 km di quota), dove l’intensa interazione con la radiazione solare ionizza
gli atomi dell’atmosfera, producendo correnti elettriche molto intense.
Composizione di dettaglio media della aria
Gas Massa molecolare frazione
Azoto (N2) 28.013 78.08 %
Ossigeno (O2) 31.999 20.95 %
Acqua (H2O) da 0 a 4 %
Argon (Ar) 39.948 0.93 %
Andamento della concentrazione dell'anidride carbonica in funzione del tempo passato (espresso in anni). Le concentrazioni sono ricavate dallo studio dalle carote dei ghiacciai antartici
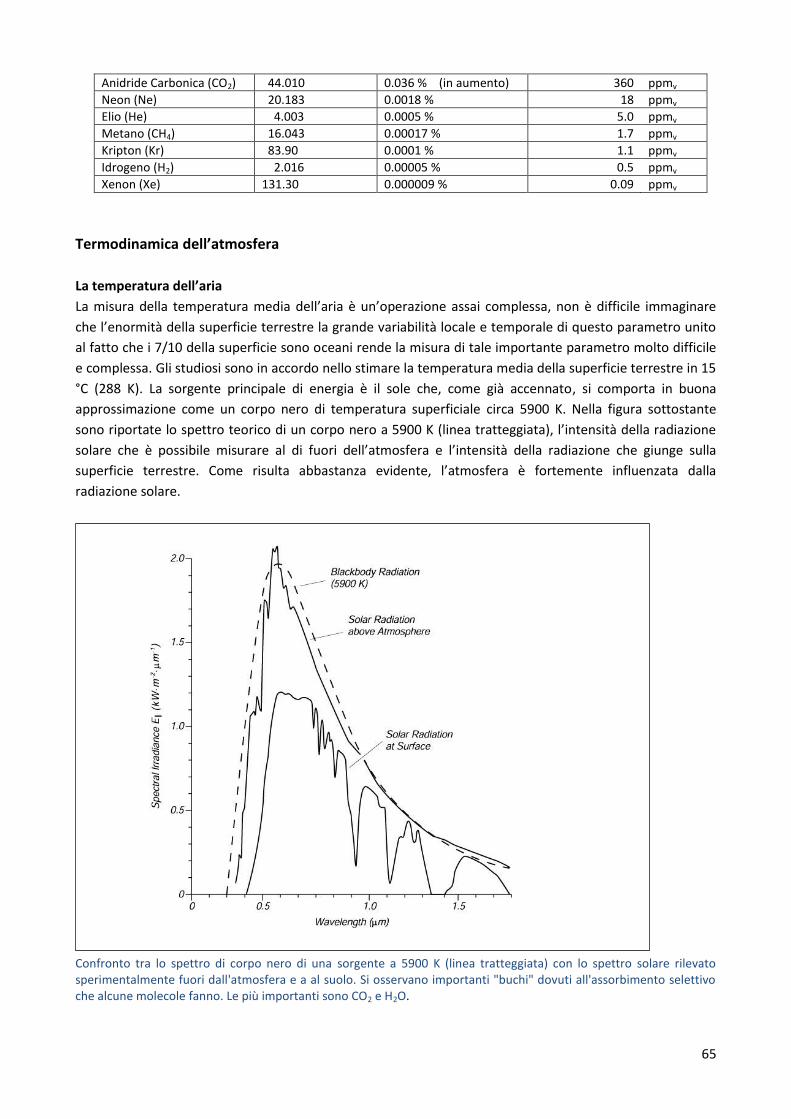
65
Anidride Carbonica (CO2) 44.010 0.036 % (in aumento) 360 ppmv
Neon (Ne) 20.183 0.0018 % 18 ppmv
Elio (He) 4.003 0.0005 % 5.0 ppmv
Metano (CH4) 16.043 0.00017 % 1.7 ppmv
Kripton (Kr) 83.90 0.0001 % 1.1 ppmv
Idrogeno (H2) 2.016 0.00005 % 0.5 ppmv
Xenon (Xe) 131.30 0.000009 % 0.09 ppmv
Termodinamica dell’atmosfera
La temperatura dell’aria
La misura della temperatura media dell’aria è un’operazione assai complessa, non è difficile immaginare
che l’enormità della superficie terrestre la grande variabilità locale e temporale di questo parametro unito
al fatto che i 7/10 della superficie sono oceani rende la misura di tale importante parametro molto difficile
e complessa. Gli studiosi sono in accordo nello stimare la temperatura media della superficie terrestre in 15
°C (288 K). La sorgente principale di energia è il sole che, come già accennato, si comporta in buona
approssimazione come un corpo nero di temperatura superficiale circa 5900 K. Nella figura sottostante
sono riportate lo spettro teorico di un corpo nero a 5900 K (linea tratteggiata), l’intensità della radiazione
solare che è possibile misurare al di fuori dell’atmosfera e l’intensità della radiazione che giunge sulla
superficie terrestre. Come risulta abbastanza evidente, l’atmosfera è fortemente influenzata dalla
radiazione solare.
Confronto tra lo spettro di corpo nero di una sorgente a 5900 K (linea tratteggiata) con lo spettro solare rilevato sperimentalmente fuori dall'atmosfera e a al suolo. Si osservano importanti "buchi" dovuti all'assorbimento selettivo che alcune molecole fanno. Le più importanti sono CO2 e H2O.

66
Infatti se considerassimo il semplice bilancio radiativo tra sole e terra la temperatura di equilibrio che ne
risulta è diversa sensibilmente da quella determinata sperimentalmente.
L’energia proveniente dal sole subito fuori dall’atmosfera vale I0 = 1370 W/m2, tale valore è detto “costante
solare”, calcolato da Van Allen ha trovato una buona conferma sperimentale. Il flusso di energia
proveniente dal sole è intercettato dalla terra con una superficie efficace pari all’area di un disco dr raggio
uguale a quello terrestre. Poiché la terra gira e la sua superficie è quattro volte quella del cerchio che
intercetta la radiazione solare, la radiazione media sulla superficie esterna dell’atmosfera corrisponde a un
quarto di quella in arrivo dal sole. Tuttavia l’energia che arriva sulla terra è senz’altro minore di quella che
giunge ai limiti dell’atmosfera, questa infatti ha la proprietà di riflettere, diffondere, assorbire e infine
trasmettere alla superficie della Terra la radiazione solare che l’attraversa. Inoltre, essendo la radiazione
solare un onda elettromagnetica policromatica, l’intensità di tali effetti di interazione con l’atmosfera
risulta dipendere dalla lunghezza d’onda della radiazione incidente. Infine, ragionando in termini di
quantità di energia radiante in arrivo che la Terra riesce a trattenere , bisogna considerare che essa dipende
dalla natura della superficie e dal suo grado di umidità e sempre in funziona della lunghezza d’onda della
radiazione incidente: il rapporto tra radiazione riflessa e radiazione solare incidente viene chiamato albedo
(A) della superficie (suolo e mare) ed indipendente dalla presenza dell’atmosfera, il suo valore medio per
tutto il globo viene assunto pari al 4%. Se poi si tiene conto dell’effetto riflettente verso lo spazio ad opera
dell’atmosfera, riferito a tutte le lunghezze d’onda, otteniamo un albedo globale del 35%. Il complemento
ad 1 dell’albedo viene talvolta chiamato nerezza ed indicato con la lettera N.
(𝑎𝑙𝑏𝑒𝑑𝑜) 𝐴 = 𝐼𝑛𝑡𝑒𝑛𝑠𝑖𝑡à 𝑟𝑎𝑑𝑖𝑎𝑧𝑖𝑜𝑛𝑒 𝑟𝑖𝑓𝑙𝑒𝑠𝑠𝑎
𝐼𝑛𝑡𝑒𝑛𝑠𝑖𝑡à 𝑟𝑎𝑑𝑖𝑎𝑧𝑖𝑜𝑛𝑒 𝑖𝑛𝑐𝑖𝑑𝑒𝑛𝑡𝑒
Proviamo ora a calcolare la temperatura della terra in caso di equilibrio radiativo, considerando la terra come un corpo nero, chiamiamo I0 il flusso di energia proveniente dal sole fuori dall’atmosfera, Ia sarà l’energia per metro quadro assorbita dalla superficie terrestre e Ie quella emessa, avremo
𝐼𝑎 = (1 − 𝐴)𝐼0
4
𝐼𝑒 = 𝜎 𝑇𝑇4
Quindi se Ia = Ie
𝑇𝑇 = √(1 − 𝐴)𝐼0
4 𝜎
4
= √(1 − 0.35) ∙ 1400
4 ∙ 5.67 × 10−8
4
= 2.52 × 102 ≈ 250 𝐾
Una temperatura del genere si registra a circa 5 km di altezza sul livello del mare, concludiamo che l’atmosfera contribuisce all’innalzamento della temperatura. Per pressioni e temperature tipiche della troposfera l’aria può essere considerata un miscuglio di gas perfetti ai quali è possibile applicare l’equazione di stato
𝑝𝑉 = 𝑛𝑅𝑇 Ricordiamo che il numero di moli n è il rapporto tra la massa m del gas e il peso molecolare medio Pm, introduciamo allora una nuova costante
𝑅𝑎𝑟𝑖𝑎 = 𝑅𝑎 = 𝑅
𝑃𝑚𝑜𝑙𝑒𝑐𝑜𝑙𝑎𝑟𝑒 𝑚𝑒𝑑𝑖𝑜
Otteniamo
𝑝 𝑉 = 𝑚
𝑃𝑚 𝑅 𝑇 = 𝑚 𝑅𝑎𝑇

67
Considerando come peso molecolare medio dell’aria secca Pm = 29 [PN2 = 28 (80%), PO2 = 32 (20%)]. In atmosfera ha poco significato il concetto di volume, spesso lo stato dell’aria è descritto attraverso la sua densità che otteniamo direttamente dividendo entrambi i membri dell’equazione di stato per il volume
𝑝 = 𝑚
𝑉 𝑅𝑎 𝑇 = 𝜌 𝑅𝑎 𝑇
Ricordiamo che in condizioni normali la densità dell’aria è circa = 1.2 kg/m3 ed 𝑅𝑎 = 𝑅
𝑃𝑚=
1000 ∙8.31
29=
287 [𝐽
𝑘𝑔∙ 𝐾]
Variazione delle pressione con la quota L’atmosfera, data la sua massa, esercita non solo una pressione cinetica ma anche una pressione idrostatica dovuta alla gravità, variabile con la quota.
Consideriamo la pressione p ad una certa quota z e innalziamoci di una piccola quantità z, avremo un piccola diminuzione di pressione dovuta alla massa dm contenuta un piccolo elemento di aria contenuto in
un cilindretto avente area di base dS e altezza z rimasta sotto, avremo cioè
∆𝑝 = −𝑑𝑚 𝑔
𝑑𝑆= −𝜌 𝑑𝑆 ∆𝑧
𝑔
𝑑𝑆= − 𝜌 𝑔 ∆𝑧
Dall’ultima espressione evinciamo che:
- la variazione di pressione è proporzionale alla densità del fluido (per cui la variazione sarà più rapida vicino alla superficie dove l’aria è più densa e meno in quota dove l’aria è più rarefatta)
- maggiore è la densità e più rapidamente decresce la pressione con la quota (osserviamo per inciso
che l’aria umida ha una densità inferiore all’aria secca) La variazione di una grandezza con la posizione prende il nome di gradiente, per cui, l’ultima espressione descrive il gradiente verticale della pressione rispetto alla quota, al suolo questo valore è
∆𝑝 = − 𝜌 𝑔 ∆𝑧 = −1.2 ∙ 9.8 ∆𝑧 ≈ 0.1 (𝑚𝑏𝑎𝑟)∆𝑧 Con riferimento al suolo, la pressione decresce di 0.1 mbar (10 Pa) per ogni metro di altezza (principio di funzionamento degli altimetri a pressione).
Variazione della Temperatura con la quota Supponiamo che un volume di aria, contenente una massa m unitaria (così che il volume occupato sia l’inverso della densità) subisca un sollevamento: trovandosi ad una pressione esterna diminuita di un
fattore p, si espanderà e, poiché non si verifica uno scambio di calore con l’atmosfera circostante a causa della bassa conducibilità termica dell’aria, l’energia per l’espansione verrà fornita dall’energia interna e la temperatura della massa diminuirà (espansione adiabatica). Possiamo schematizzare il processo nel seguente modo:
- l’aria sale e si raffredda a pressione e volume costante variando la propria energia interna della quantità ∆𝑈 = 𝑛 𝑐𝑣∆𝑇
- l’aria si espande contro la pressione esterna richiedendo un’energia pari al lavoro compiuto 𝑝∆𝑉 avremo allora
∆𝑈(𝑇) + 𝐿 = 0 → 𝑛 𝑐𝑣∆𝑇 + 𝑝 ∆𝑉 = 0 → 𝑝 ∆𝑉 = − 𝑛 𝑐𝑣∆𝑇

68
Applichiamo queste osservazioni ad una massa m = 1 kg di aria secca, la massa sarà m = nxPm/1000
(considerando come peso molecolare medio dell’aria Pm = 28.8), in questo modo la densità sarà il
reciproco del volume 𝜌 = 1𝑉⁄
Ricordiamo che
𝑝 𝑉 = 𝑛 𝑅 𝑇 Una piccola variazione di temperatura T si traduce in
𝑝 ∆𝑉 + 𝑉 ∆𝑝 = 𝑛𝑅 ∆𝑇 Confrontando con
𝑝 ∆𝑉 = − 𝑛 𝑐𝑣∆𝑇 E ricordando che per una mole di gas vale R + cv = cp, otteniamo
𝑉 ∆𝑝 = 𝑛𝑅 ∆𝑇 + 𝑛 𝑐𝑣∆𝑇 = 𝑛 𝑐𝑝∆𝑇
Ricordiamo che ∆𝑝 = − 𝜌 𝑔 ∆𝑧, allora possiamo riscrivere
𝑉 (− 𝜌 𝑔 ∆𝑧) = 𝑛 𝑐𝑝∆𝑇
Avendo ipotizzato m = 1 la densità 𝜌 = 1𝑉⁄ , pertanto otteniamo
∆𝑇
∆𝑧= − (
𝑔
𝑛 𝑐𝑝)
Poiché il numero di moli considerato corrisponde alla massa unitaria, si usa il calore specifico per unità di
massa anche nei gas, otteniamo allora
∆𝑇
∆𝑧= − (
𝑔
𝑐𝑝) ≈ 0.01 [°𝐶
𝑚⁄ ]
Che rappresenta il gradiente adiabatico per l’aria secca (Dry Adiabatic Lapse Rate - DALR). Considerando
che il calore specifico dell’aria secca è cp = 1005 (J/kg·K), otteniamo come valore per il gradiente adiabatico
d = 0.01°C/m, un grado ogni cento metri. (il calore specifico è stato calcolato considerando l’aria un gas
biatomico di peso molecolare 28.8, per cui nell’unità di massa ci sono n = 1000/28.8 = 34.7 moli,
moltiplicando questo valore per 7/2·R otteniamo il valore di circa 1000 J/kg·K che abbiamo usato).
L’umidità dell’aria Il valore del gradiente adiabatico trovato teoricamente è maggiore della variazione della temperatura con
la quota che si osserva sperimentalmente. Ciò è dovuto alla presenza in atmosfera di importanti quantità di
vapore acqueo. Tale presenza è generata dall’evaporazione della superficie degli oceani e sulla terraferma
dalla traspirazione delle piante. Una volta presente nella parte inferiore dell’atmosfera, l’umidità viene
trasportata verso l’alto dai moti turbolenti dell’aria, finche, raffreddandosi, condensa e ritorna al suolo
sotto forma di pioggia o neve.
Una massa di aria umida può essere schematizzata come un miscuglio di aria secca a composizione
costante (peso molecolare 28.8) e di vapore acqueo (peso molecolare) 18. Se riprendiamo la formula con la
quale è stato stimato il gradiente adiabatico dell’aria secca osserviamo che dipende dal calore specifico per
unità di massa, calcolato come prodotto del numero di moli di gas contenute in mille grammi per 7R/2. Nel
caso dell’aria umida, essendo il peso molecolare medio inferiore a quello dell’aria secca e poiché la
molecola d’acqua è triatomica, risulta che il calore specifico dell’aria umida è maggiore di quello dell’aria
secca e, di conseguenza, il gradiente adiabatico inferiore. Si deve poi considerare che, in caso di
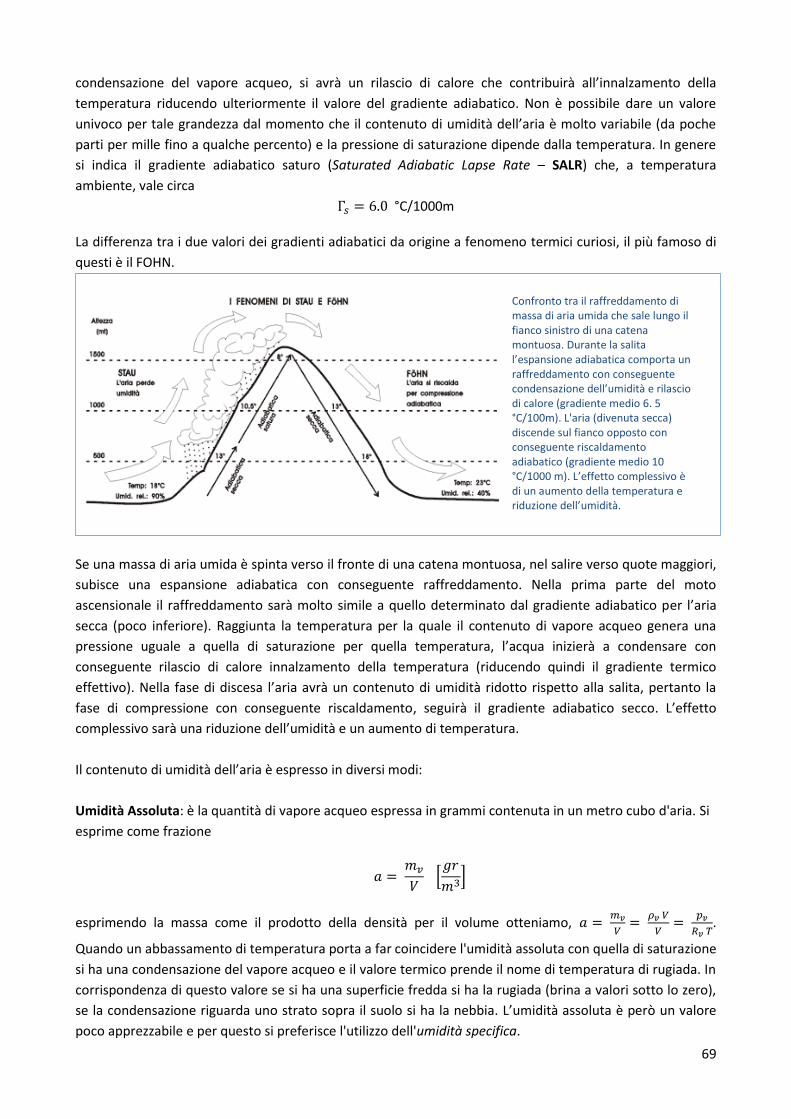
69
condensazione del vapore acqueo, si avrà un rilascio di calore che contribuirà all’innalzamento della
temperatura riducendo ulteriormente il valore del gradiente adiabatico. Non è possibile dare un valore
univoco per tale grandezza dal momento che il contenuto di umidità dell’aria è molto variabile (da poche
parti per mille fino a qualche percento) e la pressione di saturazione dipende dalla temperatura. In genere
si indica il gradiente adiabatico saturo (Saturated Adiabatic Lapse Rate – SALR) che, a temperatura
ambiente, vale circa
Γ𝑠 = 6.0 °C/1000m La differenza tra i due valori dei gradienti adiabatici da origine a fenomeno termici curiosi, il più famoso di
questi è il FOHN.
Se una massa di aria umida è spinta verso il fronte di una catena montuosa, nel salire verso quote maggiori,
subisce una espansione adiabatica con conseguente raffreddamento. Nella prima parte del moto
ascensionale il raffreddamento sarà molto simile a quello determinato dal gradiente adiabatico per l’aria
secca (poco inferiore). Raggiunta la temperatura per la quale il contenuto di vapore acqueo genera una
pressione uguale a quella di saturazione per quella temperatura, l’acqua inizierà a condensare con
conseguente rilascio di calore innalzamento della temperatura (riducendo quindi il gradiente termico
effettivo). Nella fase di discesa l’aria avrà un contenuto di umidità ridotto rispetto alla salita, pertanto la
fase di compressione con conseguente riscaldamento, seguirà il gradiente adiabatico secco. L’effetto
complessivo sarà una riduzione dell’umidità e un aumento di temperatura.
Il contenuto di umidità dell’aria è espresso in diversi modi:
Umidità Assoluta: è la quantità di vapore acqueo espressa in grammi contenuta in un metro cubo d'aria. Si
esprime come frazione
𝑎 = 𝑚𝑣
𝑉 [
𝑔𝑟
𝑚3]
esprimendo la massa come il prodotto della densità per il volume otteniamo, 𝑎 = 𝑚𝑣
𝑉=
𝜌𝑣 𝑉
𝑉=
𝑝𝑣
𝑅𝑣 𝑇.
Quando un abbassamento di temperatura porta a far coincidere l'umidità assoluta con quella di saturazione
si ha una condensazione del vapore acqueo e il valore termico prende il nome di temperatura di rugiada. In
corrispondenza di questo valore se si ha una superficie fredda si ha la rugiada (brina a valori sotto lo zero),
se la condensazione riguarda uno strato sopra il suolo si ha la nebbia. L’umidità assoluta è però un valore
poco apprezzabile e per questo si preferisce l'utilizzo dell'umidità specifica.
Confronto tra il raffreddamento di massa di aria umida che sale lungo il fianco sinistro di una catena montuosa. Durante la salita l’espansione adiabatica comporta un raffreddamento con conseguente condensazione dell’umidità e rilascio di calore (gradiente medio 6. 5 °C/100m). L'aria (divenuta secca) discende sul fianco opposto con conseguente riscaldamento adiabatico (gradiente medio 10 °C/1000 m). L’effetto complessivo è di un aumento della temperatura e riduzione dell’umidità.

70
Umidità Specifica: è il rapporto della massa del vapore acqueo e la massa d'aria umida (aria secca più
vapore); poiché il contenuto di vapore è generalmente piccolo rispetto al totale, si definisce quindi
l’umidità specifica (o titolo dell’aria umida)
𝑥 = 𝑚𝑣
𝑚𝑎 (
𝑘𝑔 𝑎𝑐𝑞𝑢𝑎
𝑘𝑔 𝑎𝑟𝑖𝑎 𝑠𝑒𝑐𝑐𝑎)
x= 𝑚𝑣
𝑚𝑎=
𝜌𝑣
𝜌𝑎=
𝑝𝑣
𝑅𝑣𝑇 ∙
𝑅𝑎 𝑇
𝑝𝑎=
𝑝𝑣∙𝑅𝑎
𝑅𝑣∙ 𝑝𝑎= 0.622
𝑝𝑣
𝑝𝑎= 0.622
𝑝𝑣
𝑝𝑡𝑜𝑡− 𝑝𝑣
Umidità relativa: indica il rapporto percentuale tra la quantità di vapore contenuto da una massa d'aria e la
quantità massima (cioè a saturazione) che il volume d'aria può contenere nelle stesse condizioni di
temperatura e pressione. Alla temperatura di rugiada l'umidità relativa è per definizione del 100%.
L'umidità relativa è un parametro dato dal rapporto tra umidità assoluta e l'umidità di saturazione.
𝑈𝑅 = 𝑚𝑣
𝑚𝑠𝑎𝑡 ∙ 100 =
𝑝𝑣
𝑅𝑣𝑇 ∙
𝑅𝑣 𝑇
𝑝𝑠𝑎𝑡 ∙ 100 =
𝑝𝑣
𝑝𝑠𝑎𝑡 ∙ 100
Esempio: se una massa d'aria ha una temperatura propria, ad esempio, di 15 °C con una quantità di umidità
relativa pari al 50%, affinché tale umidità possa raggiungere il 100% (saturazione) a pressione costante, e,
magari depositarsi (condensazione) sarà necessario abbassare la temperatura della massa d'aria, ad
esempio, di 5 °C, portarla cioè da 15 °C a 10 °C.
A seguito di un raffreddamento a pressione costante, per effetto della progressiva riduzione della pressione
di saturazione, si ha un incremento dell'umidità relativa, fino a quando essa non arriva al 100%, quando la
psat coincide con la pressione parziale del vapore. Ogni ulteriore raffreddamento provocherà una
condensazione. Tale temperatura prende il nome di temperatura di incipiente condensazione o
temperatura di rugiada, indicata con il simbolo TR. Questa denominazione deriva dal fenomeno naturale
per cui, durante la notte, la graduale diminuzione di temperatura fa sì che questa possa scendere, specie
dopo giornate soleggiate che favoriscono l'evaporazione, a valori tali che la corrispondente pressione di
saturazione diviene uguale o inferiore alla pressione di vapore. In tal caso si deve verificare la
condensazione del vapore in forma di piccole gocce di rugiada affinché la pressione di vapore continui ad
eguagliare la psat.
La determinazione della temperatura di rugiada può essere fatta a partire dalla conoscenza della pressione
di vapore e determinando la temperatura per la quale essa eguaglia la psat. Alternativamente, se UR>50% è
possibile impiegare la seguente equazione empirica:
𝑇𝑅 = 𝑇 − (100 − 𝑈𝑅
5)
Oppure la formula inversa
𝑈𝑅 = 5 ∙ (𝑇𝑅 − 𝑇) + 100
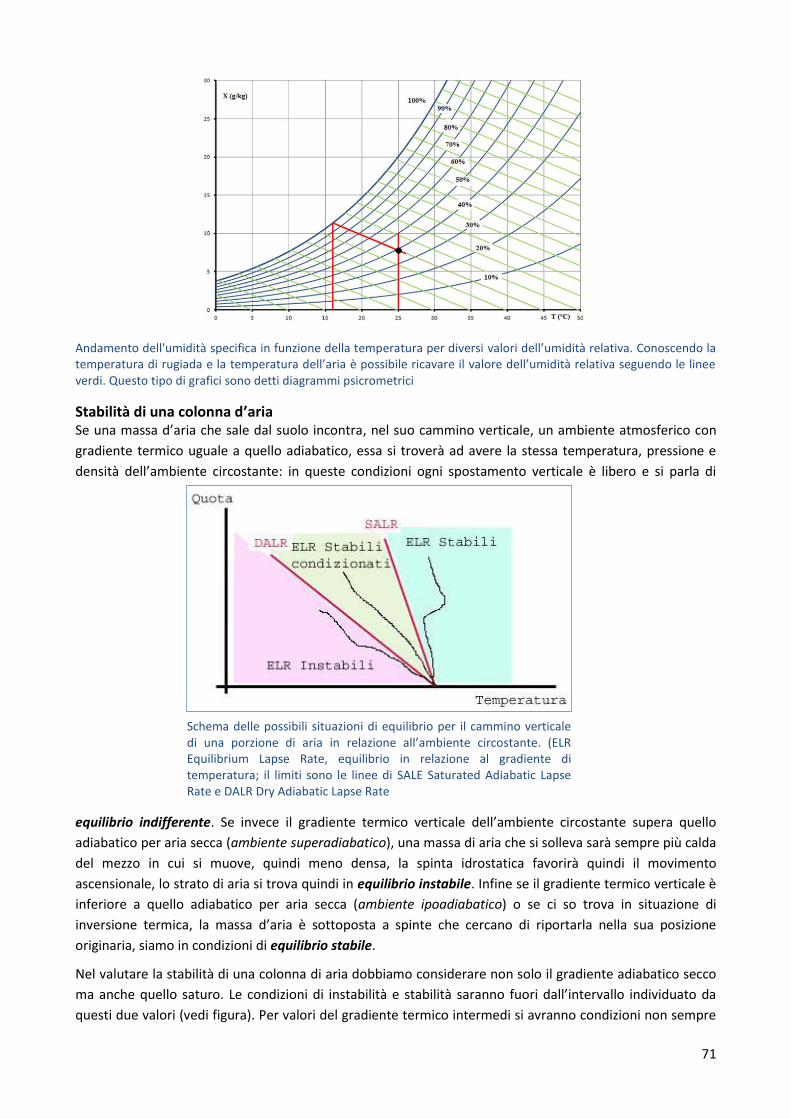
71
Andamento dell'umidità specifica in funzione della temperatura per diversi valori dell’umidità relativa. Conoscendo la temperatura di rugiada e la temperatura dell’aria è possibile ricavare il valore dell’umidità relativa seguendo le linee verdi. Questo tipo di grafici sono detti diagrammi psicrometrici
Stabilità di una colonna d’aria Se una massa d’aria che sale dal suolo incontra, nel suo cammino verticale, un ambiente atmosferico con
gradiente termico uguale a quello adiabatico, essa si troverà ad avere la stessa temperatura, pressione e
densità dell’ambiente circostante: in queste condizioni ogni spostamento verticale è libero e si parla di
equilibrio indifferente. Se invece il gradiente termico verticale dell’ambiente circostante supera quello
adiabatico per aria secca (ambiente superadiabatico), una massa di aria che si solleva sarà sempre più calda
del mezzo in cui si muove, quindi meno densa, la spinta idrostatica favorirà quindi il movimento
ascensionale, lo strato di aria si trova quindi in equilibrio instabile. Infine se il gradiente termico verticale è
inferiore a quello adiabatico per aria secca (ambiente ipoadiabatico) o se ci so trova in situazione di
inversione termica, la massa d’aria è sottoposta a spinte che cercano di riportarla nella sua posizione
originaria, siamo in condizioni di equilibrio stabile.
Nel valutare la stabilità di una colonna di aria dobbiamo considerare non solo il gradiente adiabatico secco
ma anche quello saturo. Le condizioni di instabilità e stabilità saranno fuori dall’intervallo individuato da
questi due valori (vedi figura). Per valori del gradiente termico intermedi si avranno condizioni non sempre
Schema delle possibili situazioni di equilibrio per il cammino verticale di una porzione di aria in relazione all’ambiente circostante. (ELR Equilibrium Lapse Rate, equilibrio in relazione al gradiente di temperatura; il limiti sono le linee di SALE Saturated Adiabatic Lapse Rate e DALR Dry Adiabatic Lapse Rate
72
determinabili, o meglio, la stabilità dipenderà anche da altri fattori. Dal punto di vista “ambientale”, se la
massa di gas della quale si sta valutando la stabilità rispetto a una spinta verticale è una gas inquinante, è la
situazione di instabilità che ne favorisce la dispersione e ne riduce la pericolosità poiché, favorendo il moto
verticale, si riduce la probabilità che il gas ritorni verso terra. Credo che sia quindi intuitivo capire
l’importanza dell’altezza di un camino al fine di minimizzare un eventuale impatto ambientale.
Pasquill (1961) introdusse una suddivisione in sei classi di stabilità (aumentate successivamente a sette),
normalmente usata attualmente per determinare lo stato di stabilità dell'atmosfera.
cat. A Condizioni estremamente instabili >= 1,9 °C/100m
cat. B Condizioni moderatamente instabili 1,7 ≤ < 1,9 °C/100m
cat. C Condizioni leggermente instabili 1,5 ≤ < 1,7 °C/100m
cat. D Condizioni neutre 0,5 ≤ < 1,5 °C/100m
cat. E Condizioni leggermente stabili -1,5 ≤ < 0,5 °C/100m
cat. F Condizioni stabili � -4 ≤ < -1,5 °C/100m
cat. G Stabilità forte < -4 °C/100m.
Le prime tre categorie si riferiscono ad un gradiente di temperatura assoluta superadiabatico, la categoria D
ad un gradiente adiabatico e le ultime categorie E, F e G ad un gradiente subadiabatico. Il gradiente termico
verticale è espresso in °C/100m. Ovviamente il metodo più esatto, per la valutazione del grado di stabilità,
sarebbe quello della determinazione continua del gradiente termico verticale, fino ad una ragionevole
altezza dal suolo, per poi procedere, dopo una congrua serie di osservazioni, alla classificazione dei dati
ottenuti secondo opportuni intervalli di valori del gradiente rispetto all'adiabatica secca.
Questo metodo però, richiedendo molto tempo e particolari strumentazioni di misura, presenta notevoli
difficoltà di attuazione nella pratica. In mancanza di queste informazioni, si attribuisce un valore di stabilità,
uniforme in tutto lo strato di atmosfera, utilizzando i dati disponibili al suolo.
I movimenti orizzontali delle masse di aria
Il vento è il movimento di una massa d’aria atmosferica da un'area con alta pressione ad un'area con bassa
pressione. In genere con tale termine si fa riferimento alle correnti aeree di tipo orizzontale, mentre per
quelle verticali si usa generalmente il termine correnti convettive che si originano invece per instabilità
atmosferica verticale..
In presenza di due punti con differente atmosferica si origina una forza detta forza del gradiente di
pressione o forza di gradiente che agisce premendo sulla massa d'aria per tentare di ristabilire l'equilibrio. Il
flusso d'aria non corre in maniera diretta da un punto all'altro, cioè con stessa direzione della forza di
gradiente, ma subisce una deviazione dovuta alla forza di Coriolis che tende a spostarlo verso destra
nell'emisfero boreale e verso sinistra nell'emisfero australe. A causa di questo effetto il vento soffia
parallelamente alle isobare. In questo caso si parla di vento geostrofico. Tuttavia alle basse quote (meno di
600 m) è necessario tenere anche conto dell'azione dell'attrito con la superficie terrestre, che è in grado di
modificare la direzione del vento di circa 10° sul mare e 15-30° sulla terra rispetto a quella del vento
geostrofico, rendendo il percorso dall'alta pressione alla bassa pressione più diretto. La velocità del vento, o
meglio la sua intensità, dipende dal gradiente barico, cioè dalla distanza delle isobare, e si misura con uno
strumento chiamato anemometro e può essere espressa in:
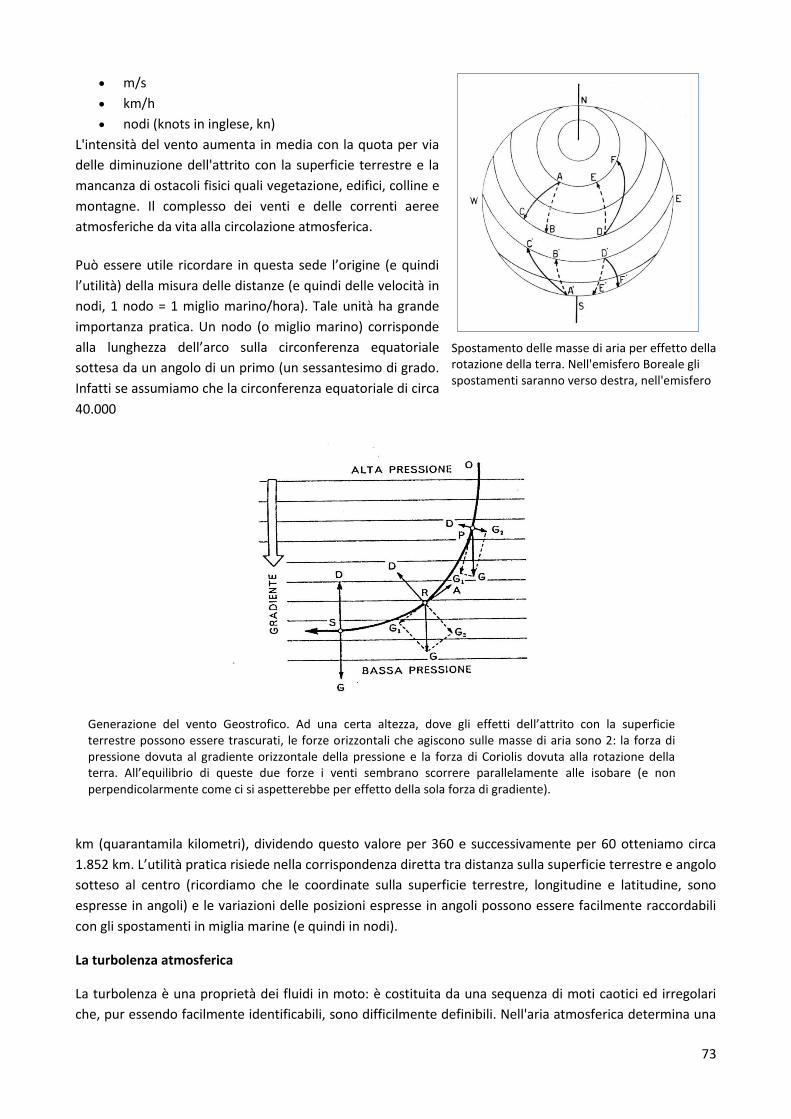
73
m/s
km/h
nodi (knots in inglese, kn)
L'intensità del vento aumenta in media con la quota per via
delle diminuzione dell'attrito con la superficie terrestre e la
mancanza di ostacoli fisici quali vegetazione, edifici, colline e
montagne. Il complesso dei venti e delle correnti aeree
atmosferiche da vita alla circolazione atmosferica.
Può essere utile ricordare in questa sede l’origine (e quindi
l’utilità) della misura delle distanze (e quindi delle velocità in
nodi, 1 nodo = 1 miglio marino/hora). Tale unità ha grande
importanza pratica. Un nodo (o miglio marino) corrisponde
alla lunghezza dell’arco sulla circonferenza equatoriale
sottesa da un angolo di un primo (un sessantesimo di grado.
Infatti se assumiamo che la circonferenza equatoriale di circa
40.000
km (quarantamila kilometri), dividendo questo valore per 360 e successivamente per 60 otteniamo circa
1.852 km. L’utilità pratica risiede nella corrispondenza diretta tra distanza sulla superficie terrestre e angolo
sotteso al centro (ricordiamo che le coordinate sulla superficie terrestre, longitudine e latitudine, sono
espresse in angoli) e le variazioni delle posizioni espresse in angoli possono essere facilmente raccordabili
con gli spostamenti in miglia marine (e quindi in nodi).
La turbolenza atmosferica
La turbolenza è una proprietà dei fluidi in moto: è costituita da una sequenza di moti caotici ed irregolari
che, pur essendo facilmente identificabili, sono difficilmente definibili. Nell'aria atmosferica determina una
Spostamento delle masse di aria per effetto della rotazione della terra. Nell'emisfero Boreale gli spostamenti saranno verso destra, nell'emisfero Australe verso sinistra.
Generazione del vento Geostrofico. Ad una certa altezza, dove gli effetti dell’attrito con la superficie terrestre possono essere trascurati, le forze orizzontali che agiscono sulle masse di aria sono 2: la forza di pressione dovuta al gradiente orizzontale della pressione e la forza di Coriolis dovuta alla rotazione della terra. All’equilibrio di queste due forze i venti sembrano scorrere parallelamente alle isobare (e non perpendicolarmente come ci si aspetterebbe per effetto della sola forza di gradiente).
74
continua variazione della velocità istantanea e della direzione del vento. La struttura di una massa d'aria in
movimento può essere rappresentata da una successione continua e complessa di fluttuazioni casuali, le
cui dimensioni sono finite ma di durata irregolare e di frequenza variabile. La turbolenza atmosferica può
essere originata da fenomeni di natura meccanica quali la irregolarità della superficie terrestre o dalla
distribuzione verticale del vento; in questi casi il moto turbolento è generato da fenomeni connessi con la
struttura termica verticale dell'atmosfera. Le manifestazioni della turbolenza si definiscono raffiche; la loro
frequenza massima è riscontrabile nel periodo di mezzogiorno, mentre si riducono considerevolmente
durante la notte. La variazione diurna delle raffiche è imputabile allo stato del cielo: se è in atto una
copertura nuvolosa di notevole estensione e ampio spessore, il rapporto fra le oscillazioni istantanee del
vento e il vento medio è pressoché costante per tutto il periodo corrispondente a quel particolare tipo di
copertura. Da ciò si può evincere che la variazione diurna della turbolenza termica del suolo poiché le nubi
tendono ad impedire lo scambio radiativo tra il suolo e gli strati d'aria sovrastanti, i quali, a loro volta,
influenzano il gradiente di temperatura nei bassi strati atmosferici. Questo evidenzia una stretta
correlazione fra il tipo di stabilità degli strati d'aria e il grado di turbolenza della struttura del vento. La
turbolenza assume notevole importanza per i fenomeni di mescolamento. La turbolenza può trasferire
calore: infatti se lo strato d'aria in prossimità del suolo si riscalda fino a divenire più caldo dello strato
immediatamente sovrastante, si stabilirà un gradiente calore-energia al di sopra del suolo. Un elemento
d'aria che si sposta verso l'alto trasporterà una quantità di energia termica maggiore di quella che un
elemento d'aria potrà trasportare spostandosi da un livello superiore verso uno inferiore. In questo caso si
stabilisce un flusso di calore verso l'alto determinato dal moto turbolento. Le proprietà fisiche dell'aria si
trasferiscono pertanto per turbolenza nella direzione dei valori decrescenti. Maggiore è la turbolenza o il
valore del gradiente, maggiore sarà l'instabilità e, di conseguenza, il ritmo con il quale avverrà il
trasferimento o il mescolamento.
Trasporto di inquinanti in atmosfera La diffusione molecolare Un eventuale inquinante gassoso o sotto forma di polvere fine, immesso in atmosfera non resterà
ovviamente nella posizione di immissione ma inizierà un processo di dispersione (diffusione) e sarà
trasportato insieme alle masse di aria soggette ai loro movimenti principali: il vento (per i moti orizzontali)
e le correnti convettive o turbolente per moti verticali
Urti fra molecole e cammino libero medio Se le molecole in un gas non sono esattamente puntiformi, esse possono modificare la loro traiettoria
perché urtano fra di loro (in aggiunta agli ovvi urti con le pareti del recipiente). Consideriamo il caso
realistico in cui le molecole sono sfere rigide di raggio r e poniamoci le seguenti domande:
Con che frequenza urtano con le altre molecole?
Di quanto si spostano in media fra un urto e l'altro?
Per rispondere a queste domande utilizziamo un modello molto semplificato per la dinamica degli urti,
dove le molecole sono sfere rigide di raggio r. Supponiamo che solo una molecola sia in moto e che tutte le
altre stiano ferme. La molecola in moto urta un'altra molecola solo se il centro di quest'ultima si trova ad
una distanza inferiore a 2r dalla sua traiettoria:

75
Nell'intervallo di tempo t la molecola in moto si sposterà di un tratto vt, e durante questo periodo urterà
qualsiasi altra molecola contenuta nel cilindro di raggio 2r e lunghezza vt. Il volume del cilindro è:
∆𝑉 = 𝜋(2𝑟)2𝑣∆𝑡 = 4𝜋𝑟2𝑣∆𝑡
Il numero di molecole con centro contenuto nel volume V sarà proporzionale al volume stesso ed alla
densità numerica (numero di particelle per unità di volume, da confondere con la densità intesa come
massa per unità di volume), quindi è facile determinare il numero di urti per unità di tempo:
∆𝑁 = 𝛿 ∆𝑉 = 4𝜋𝑟2 𝑣 𝛿 ∆𝑡 → ∆𝑁
∆𝑡= 4𝜋𝑟2 𝑣 𝛿
Questo risultato è molto semplificato, dal momento che assume che una sola molecola per volta sia in
moto; esso è sufficiente tuttavia per comprendere la dipendenza della frequenza di urti dai parametri del
sistema ed ottenere il corretto ordine di grandezza. L'analisi è un poco più complessa quando tutte le
molecole sono considerate in moto: in questo caso è possibile dimostrare che la frequenza è sempre
proporzionale a 𝑟2𝑣 𝛿, ma il fattore di proporzionalità è 4√2𝜋 invece di 4𝜋.
Il tempo medio fra gli urti, detto tempo libero medio, è il reciproco della frequenza:
𝜏 = ∆𝑡
∆𝑁=
1
4𝜋√2 𝑣 𝑟2𝛿=
𝑉
4𝜋√2 𝑣 𝑟2𝑁
La distanza media percorsa da una molecola fra un urto e l'urto successivo, detta cammino libero medio, è
data da:
𝜆 = 𝑣 𝜏 → 𝜆 = 𝑉
4𝜋√2 𝑟2𝑁
L'espressione per il cammino libero medio si può riformulare in termini della sezione d'urto totale 𝜎 di una
molecola (per una sfera rigida di raggio r la sezione d'urto è semplicemente l'area di una sezione massima
della sfera, cioè 𝜎 = 𝜋𝑟2):
𝜆 = 𝑉
4 √2 𝜎 𝑁
Il cammino libero medio risulta quindi indipendente dalla velocità della molecola, ed inversamente proporzionale alla sezione d'urto ed alla concentrazione di molecole. In termini delle proprietà termodinamiche macroscopiche del gas:
La particella colorata in rosso urterà le
particelle comprese in un cilindro
determinato dal vettore velocità come
asse e avente un raggio pari al doppio
del raggio della particella stessa
76
𝑝𝑉 = 𝑁 𝑘𝐵 𝑇 → 𝑉 = 𝑁 𝑘𝐵 𝑇
𝑝 → 𝜆 =
𝑉
4𝜋√2𝑁 𝑟2 =
𝑘𝐵𝑇
4𝜋√2 𝑝 𝑟2
Facciamo un esempio di questo valore, supponiamo un gas di Argon alla temperatura ambiente e a pressione atmosferica, possiamo considerare il raggio atomico analogo al raggio classico dell’atomo di Idrogeno rH = 0,5 x 10-10 m
𝜆 = 𝑘𝐵 𝑇
√2 𝜋 𝜎2 𝑝=
8.315 ∙ 3 ∙ 102
1.414 ∙ 3.14 ∙ 25 ∙ 10−20 ∙ 6.02 ∙ 1023
∙ 1.01325 ∙ 105= 0.037 ∙ 10−6 = 37 𝑛𝑚
Il libero cammino medio risulta essere molto piccolo, ciò significa che il numero di collisioni al secondo è
enorme f = v/, dell’ordine di 1010 collisioni al secondo.
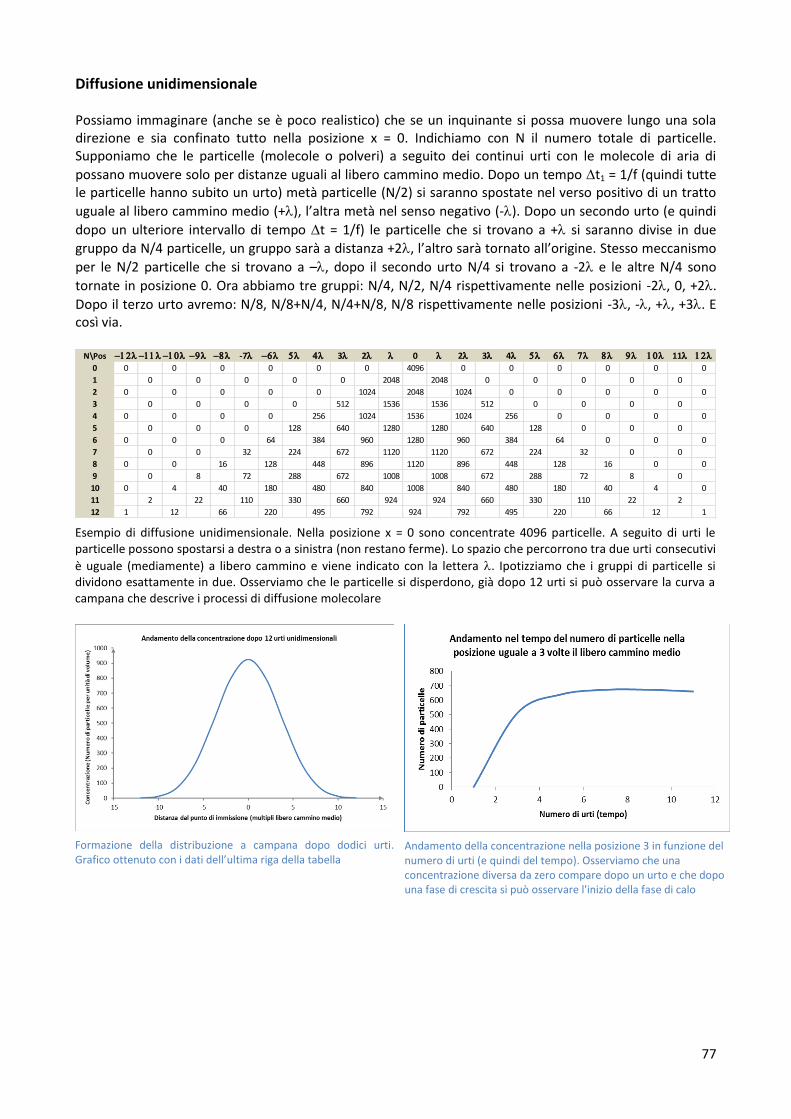
77
Diffusione unidimensionale Possiamo immaginare (anche se è poco realistico) che se un inquinante si possa muovere lungo una sola direzione e sia confinato tutto nella posizione x = 0. Indichiamo con N il numero totale di particelle. Supponiamo che le particelle (molecole o polveri) a seguito dei continui urti con le molecole di aria di
possano muovere solo per distanze uguali al libero cammino medio. Dopo un tempo t1 = 1/f (quindi tutte le particelle hanno subito un urto) metà particelle (N/2) si saranno spostate nel verso positivo di un tratto
uguale al libero cammino medio (+), l’altra metà nel senso negativo (-). Dopo un secondo urto (e quindi
dopo un ulteriore intervallo di tempo t = 1/f) le particelle che si trovano a + si saranno divise in due
gruppo da N/4 particelle, un gruppo sarà a distanza +2, l’altro sarà tornato all’origine. Stesso meccanismo
per le N/2 particelle che si trovano a –, dopo il secondo urto N/4 si trovano a -2 e le altre N/4 sono
tornate in posizione 0. Ora abbiamo tre gruppi: N/4, N/2, N/4 rispettivamente nelle posizioni -2, 0, +2.
Dopo il terzo urto avremo: N/8, N/8+N/4, N/4+N/8, N/8 rispettivamente nelle posizioni -3, -, +, +3. E così via.
.
N\Pos - - -0 -9 -8 -7 -6 4 3 2 0 2 3 4 6 7 8 9 0 11
0 0 0 0 0 0 0 4096 0 0 0 0 0 0
1 0 0 0 0 0 2048 2048 0 0 0 0 0
2 0 0 0 0 0 1024 2048 1024 0 0 0 0 0
3 0 0 0 0 512 1536 1536 512 0 0 0 0
4 0 0 0 0 256 1024 1536 1024 256 0 0 0 0
5 0 0 0 128 640 1280 1280 640 128 0 0 0
6 0 0 0 64 384 960 1280 960 384 64 0 0 0
7 0 0 32 224 672 1120 1120 672 224 32 0 0
8 0 0 16 128 448 896 1120 896 448 128 16 0 0
9 0 8 72 288 672 1008 1008 672 288 72 8 0
10 0 4 40 180 480 840 1008 840 480 180 40 4 0
11 2 22 110 330 660 924 924 660 330 110 22 2
12 1 12 66 220 495 792 924 792 495 220 66 12 1
Esempio di diffusione unidimensionale. Nella posizione x = 0 sono concentrate 4096 particelle. A seguito di urti le particelle possono spostarsi a destra o a sinistra (non restano ferme). Lo spazio che percorrono tra due urti consecutivi
è uguale (mediamente) a libero cammino e viene indicato con la lettera . Ipotizziamo che i gruppi di particelle si dividono esattamente in due. Osserviamo che le particelle si disperdono, già dopo 12 urti si può osservare la curva a campana che descrive i processi di diffusione molecolare
Formazione della distribuzione a campana dopo dodici urti. Grafico ottenuto con i dati dell’ultima riga della tabella
Andamento della concentrazione nella posizione 3 in funzione del numero di urti (e quindi del tempo). Osserviamo che una concentrazione diversa da zero compare dopo un urto e che dopo una fase di crescita si può osservare l'inizio della fase di calo
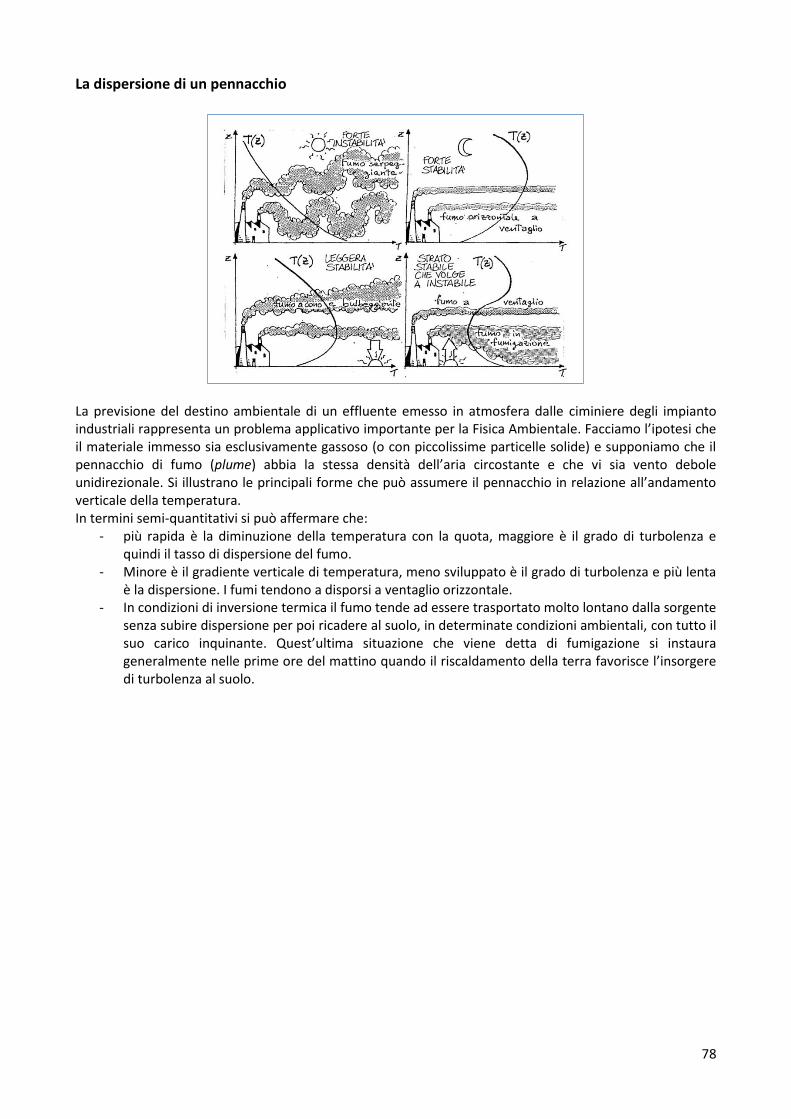
78
La dispersione di un pennacchio
La previsione del destino ambientale di un effluente emesso in atmosfera dalle ciminiere degli impianto industriali rappresenta un problema applicativo importante per la Fisica Ambientale. Facciamo l’ipotesi che il materiale immesso sia esclusivamente gassoso (o con piccolissime particelle solide) e supponiamo che il pennacchio di fumo (plume) abbia la stessa densità dell’aria circostante e che vi sia vento debole unidirezionale. Si illustrano le principali forme che può assumere il pennacchio in relazione all’andamento verticale della temperatura. In termini semi-quantitativi si può affermare che:
- più rapida è la diminuzione della temperatura con la quota, maggiore è il grado di turbolenza e quindi il tasso di dispersione del fumo.
- Minore è il gradiente verticale di temperatura, meno sviluppato è il grado di turbolenza e più lenta è la dispersione. I fumi tendono a disporsi a ventaglio orizzontale.
- In condizioni di inversione termica il fumo tende ad essere trasportato molto lontano dalla sorgente senza subire dispersione per poi ricadere al suolo, in determinate condizioni ambientali, con tutto il suo carico inquinante. Quest’ultima situazione che viene detta di fumigazione si instaura generalmente nelle prime ore del mattino quando il riscaldamento della terra favorisce l’insorgere di turbolenza al suolo.
79
L’energia dal vento (energia eolica, fonte wikipedia) L'energia eolica è la conversione dell'energia del vento in una forma utilizzabile di energia, generalmente grazie all'utilizzo di aerogeneratori che producono energia elettrica, tramite mulini a vento che producono energia . Grandi parchi eolici sono costituiti da centinaia di singoli aerogeneratori collegati alla rete di trasmissione di energia elettrica. L'eolico off-shore è più stabile, fornisce più energia e possiede un minor impatto visivo, tuttavia i costi di realizzazione e manutenzione sono notevolmente più alti. Piccoli impianti eolici on-shore forniscono elettricità a luoghi isolati. Le società elettriche acquistano sempre di più elettricità in eccesso prodotta da piccoli aerogeneratori domestici. L'energia eolica è un'energia alternativa ai combustibili fossili, abbondante, rinnovabile e a sostegno dell'economia verde, ampiamente distribuita, pulita, non produce emissioni di gas serra durante il funzionamento e richiede una superficie di terra non eccessivamente elevata. Gli effetti sull'ambiente sono in genere meno problematici rispetto a quelli provenienti da altre fonti di energia. A partire dal 2011, la Danimarca genera più di un quarto della sua energia elettrica dal vento e 83 paesi di tutto il mondo utilizzano l'energia eolica commercialmente. Nel 2010 la produzione di energia eolica è stata di oltre il 2,5% di tutto il consumo elettrico mondiale, con una crescita stimata del 25% annuo. Il costo monetario per unità di energia prodotta è simile al costo rapportabile ai nuovi impianti a gas naturale e a carbone. L'energia eolica è una fonte stabile di anno in anno, ma ha una variazione significativa su scale di tempo più brevi. L'intermittenza del vento crea raramente problemi quando essa viene utilizzata per fornire fino al 20% della domanda totale di energia elettrica, ma se la richiesta è superiore vi è necessità di particolari accorgimenti alla rete di distribuzione e una capacità di produzione convenzionale. Alcuni metodi per la gestione della potenza prodotta, come quello di possedere sistemi di stoccaggio (come stazioni di pompaggio), turbine geograficamente distribuite, fonti alternative, accordi di esportazione e importazione di energia per aree limitrofe o la riduzione della domanda quando la produzione eolica è bassa, possono ridurre notevolmente questi problemi. Inoltre, le previsioni del tempo consentono alla rete elettrica di essere preparata tempestivamente a seconda delle variazione previste nella produzione.
Energia eolica è l'energia cinetica prodotta dall'aria in movimento, e solitamente prende il nome di vento. Il totale di energia eolica che fluisce attraverso una superficie immaginaria A durante il tempo t è:
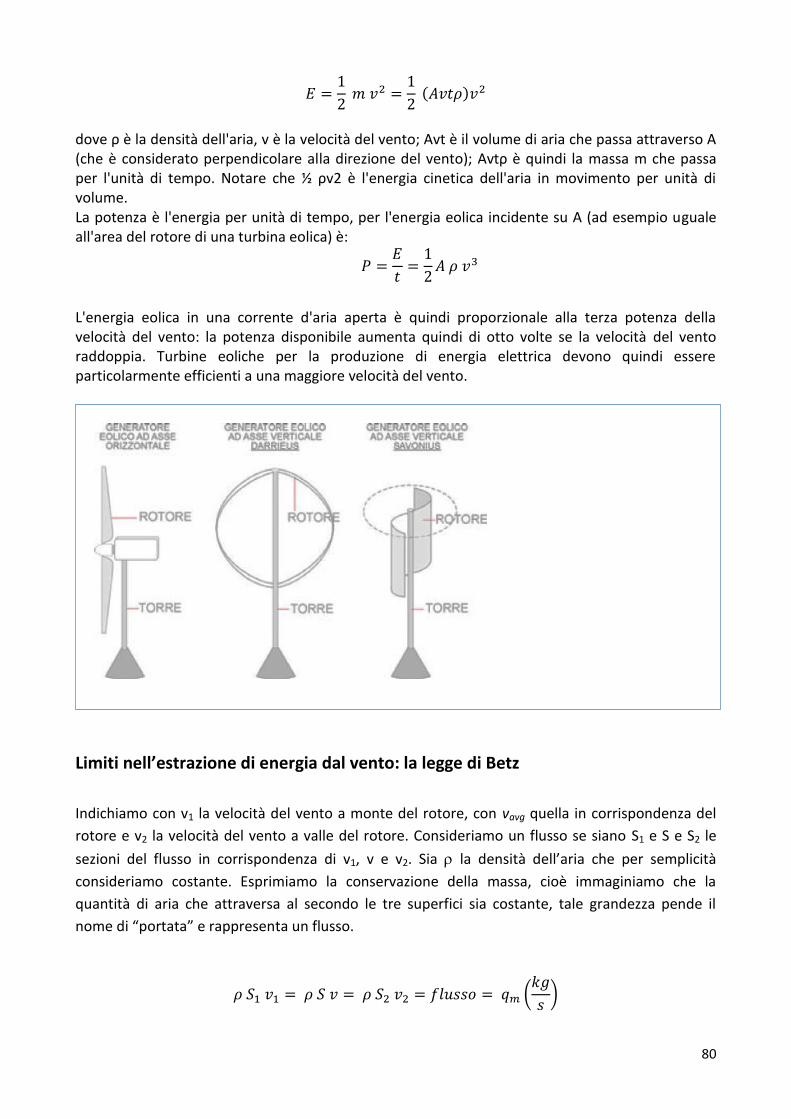
80
𝐸 =1
2 𝑚 𝑣2 =
1
2 (𝐴𝑣𝑡𝜌)𝑣2
dove ρ è la densità dell'aria, v è la velocità del vento; Avt è il volume di aria che passa attraverso A (che è considerato perpendicolare alla direzione del vento); Avtρ è quindi la massa m che passa per l'unità di tempo. Notare che ½ ρv2 è l'energia cinetica dell'aria in movimento per unità di volume. La potenza è l'energia per unità di tempo, per l'energia eolica incidente su A (ad esempio uguale all'area del rotore di una turbina eolica) è:
𝑃 =𝐸
𝑡=
1
2𝐴 𝜌 𝑣3
L'energia eolica in una corrente d'aria aperta è quindi proporzionale alla terza potenza della velocità del vento: la potenza disponibile aumenta quindi di otto volte se la velocità del vento raddoppia. Turbine eoliche per la produzione di energia elettrica devono quindi essere particolarmente efficienti a una maggiore velocità del vento.
Limiti nell’estrazione di energia dal vento: la legge di Betz
Indichiamo con v1 la velocità del vento a monte del rotore, con vavg quella in corrispondenza del
rotore e v2 la velocità del vento a valle del rotore. Consideriamo un flusso se siano S1 e S e S2 le
sezioni del flusso in corrispondenza di v1, v e v2. Sia la densità dell’aria che per semplicità
consideriamo costante. Esprimiamo la conservazione della massa, cioè immaginiamo che la
quantità di aria che attraversa al secondo le tre superfici sia costante, tale grandezza pende il
nome di “portata” e rappresenta un flusso.
𝜌 𝑆1 𝑣1 = 𝜌 𝑆 𝑣 = 𝜌 𝑆2 𝑣2 = 𝑓𝑙𝑢𝑠𝑠𝑜 = 𝑞𝑚 (𝑘𝑔
𝑠)
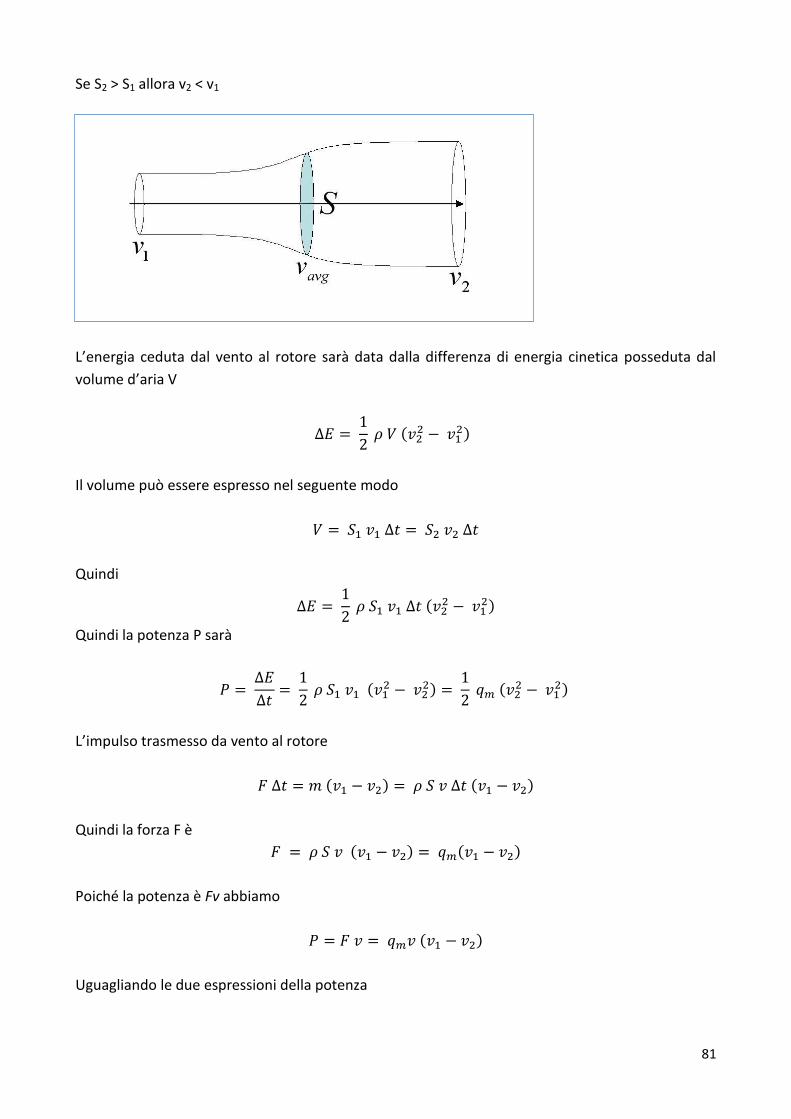
81
Se S2 > S1 allora v2 < v1
L’energia ceduta dal vento al rotore sarà data dalla differenza di energia cinetica posseduta dal
volume d’aria V
∆𝐸 = 1
2 𝜌 𝑉 (𝑣2
2 − 𝑣12)
Il volume può essere espresso nel seguente modo
𝑉 = 𝑆1 𝑣1 ∆𝑡 = 𝑆2 𝑣2 ∆𝑡
Quindi
∆𝐸 = 1
2 𝜌 𝑆1 𝑣1 ∆𝑡 (𝑣2
2 − 𝑣12)
Quindi la potenza P sarà
𝑃 = ∆𝐸
∆𝑡=
1
2 𝜌 𝑆1 𝑣1 (𝑣1
2 − 𝑣22) =
1
2 𝑞𝑚 (𝑣2
2 − 𝑣12)
L’impulso trasmesso da vento al rotore
𝐹 ∆𝑡 = 𝑚 (𝑣1 − 𝑣2) = 𝜌 𝑆 𝑣 ∆𝑡 (𝑣1 − 𝑣2)
Quindi la forza F è
𝐹 = 𝜌 𝑆 𝑣 (𝑣1 − 𝑣2) = 𝑞𝑚(𝑣1 − 𝑣2)
Poiché la potenza è Fv abbiamo
𝑃 = 𝐹 𝑣 = 𝑞𝑚𝑣 (𝑣1 − 𝑣2)
Uguagliando le due espressioni della potenza

82
𝑞𝑚𝑣 (𝑣1 − 𝑣2) = 1
2 𝑞𝑚 (𝑣1
2 − 𝑣22)
Semplificando otteniamo
𝑣 = 𝑣1 + 𝑣2
2
Introduciamo il parametro adimensionale b
𝑏 = 𝑣1 − 𝑣
𝑣1
Per cui
𝑣 = 𝑣1(1 − 𝑏) =𝑣1 + 𝑣2
2
𝑣2 = 𝑣1 (1 − 2𝑏)
Sostituendo nella formula della potenza
𝑃 = 1
2 𝑞𝑚 (𝑣1
2 − 𝑣12(1 − 2𝑏)2)
Ricordando che
𝑞𝑚 = 𝜌 ∙ 𝑆 ∙ 𝑣 = 𝜌 ∙ 𝑆 ∙ 𝑣1(1 − 𝑏)
otteniamo
𝑃 = 1
2 𝜌 ∙ 𝑆 ∙ 𝑣1(1 − 𝑏)(𝑣1
2 − 𝑣12(1 − 2𝑏)2) =
1
2 𝜌 ∙ 𝑆 ∙ 𝑣1(1 − 𝑏)(𝑣1 − 𝑣1 + 2𝑣1𝑏)(𝑣1 + 𝑣1 − 2𝑣1𝑏)
= 𝜌 ∙ 𝑆 ∙ 𝑣12𝑏(1 − 𝑏)2𝑣1(1 − 𝑏) = 2𝜌 ∙ 𝑆 ∙ 𝑣1
3𝑏 ∙ (1 − 𝑏)2
La derivata della potenza P rispetto al parametro b è del tipo
𝑑𝑃
𝑑𝑏= (1 − 𝑏)2 − 2𝑏(1 − 𝑏) = (1 − 𝑏)(1 − 3𝑏)
La derivata si annulla per b = 1 (soluzione banale) e per b = 1/3 dove P assume il valore massimo

83
𝑃 = 2𝜌 ∙ 𝑆 ∙ 𝑣13𝑏 ∙ (1 − 𝑏)2 = 2𝜌 ∙ 𝑆 ∙ 𝑣1
31
3∙ (1 −
1
3)
2
= 2𝜌 ∙ 𝑆 ∙ 𝑣13
4
27∙
Pertanto la potenza massima estraibile corrisponde al limite di Betz rapportato alla potenza
massima del vento, avremo un coefficiente massimo
𝑐𝑝,𝑚𝑎𝑥 = 2𝜌 ∙ 𝑆 ∙ 𝑣1
3 427
12 𝑆 𝜌 𝑣3
= 16
27= 0,59 (59 %)

84
L’effetto Serra

85
Le Onde Sono molti i fenomeni che nella vita quotidiana ci presentano moti ondulatori. La superficie del mare o
quella di un lago, per esempio, ci appaiono solcate da onde che generalmente si propagano dal largo verso
la riva. Se gettiamo nell’acqua un sasso vediamo apparire una serie di onde circolari che, come anelli
concentrici, si propagano a partire dal punto in cui il sasso ha toccato la superficie dell’acqua. Se
pizzichiamo un elastico teso o la corda tesa di una chitarra otteniamo un moto oscillatorio molto rapido.
Ma molti altri fenomeni, ancora più comuni di quelli appena ricordati, come il suono, la luce o la
trasmissione di segnali attraverso apparecchi radiofonici o televisivi, si basano sulla propagazione di onde,
anche se per le loro caratteristiche non siamo in grado di evidenziarne la natura ondulatoria con i nostri
sensi.
Onde circolari di superficie generate da una goccia che cade. Corde di una chitarra che vibrano.
Tutti questi fenomeni presentano due caratteristiche comuni:
- sono generati, in un punto di un mezzo materiale continuo o anche del vuoto, da una perturbazione che
non rimane confinata in quel punto ma si propaga ai punti adiacenti;
quando per esempio un sasso, cadendo sulla superficie dell’acqua ed entrandovi, la abbassa in quel punto,
questa variazione del livello dell’acqua si trasmette ai punti vicini propagandosi verso l’esterno;
- si ha una trasmissione di informazione (nel senso che la modificazione della grandezza associata all’onda
si propaga nello spazio con una certa velocità) senza che vi sia un trasporto di materia.
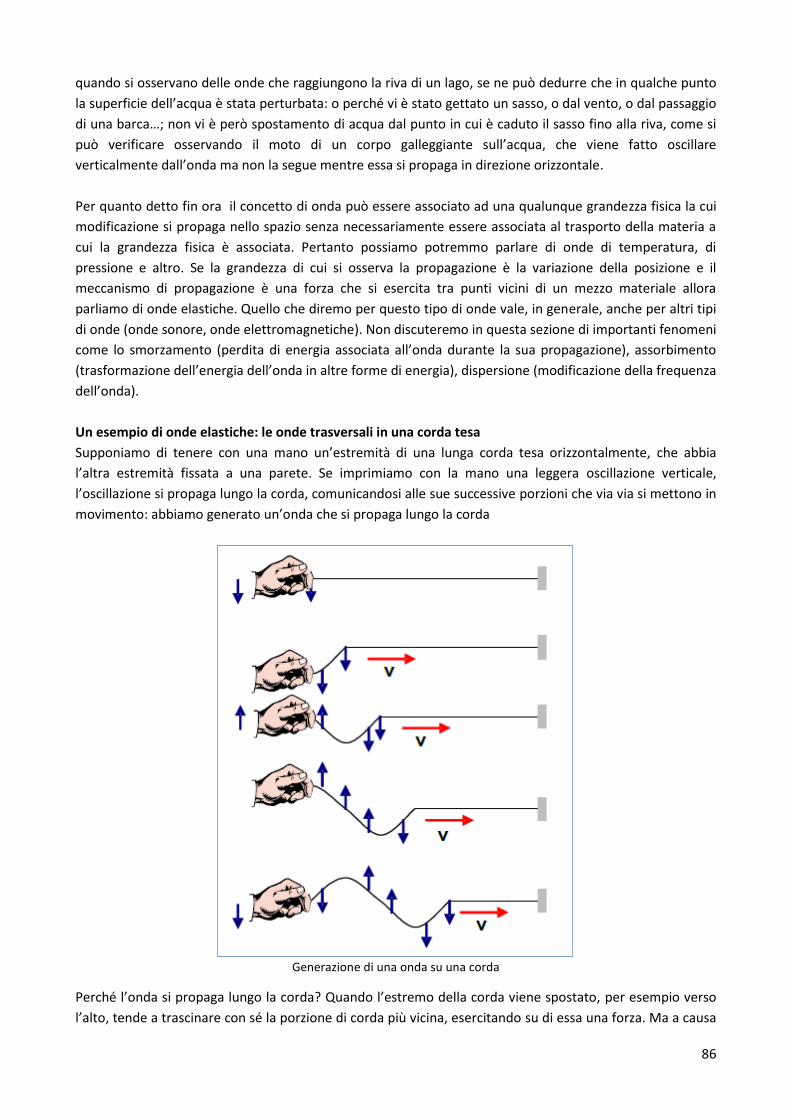
86
quando si osservano delle onde che raggiungono la riva di un lago, se ne può dedurre che in qualche punto
la superficie dell’acqua è stata perturbata: o perché vi è stato gettato un sasso, o dal vento, o dal passaggio
di una barca…; non vi è però spostamento di acqua dal punto in cui è caduto il sasso fino alla riva, come si
può verificare osservando il moto di un corpo galleggiante sull’acqua, che viene fatto oscillare
verticalmente dall’onda ma non la segue mentre essa si propaga in direzione orizzontale.
Per quanto detto fin ora il concetto di onda può essere associato ad una qualunque grandezza fisica la cui
modificazione si propaga nello spazio senza necessariamente essere associata al trasporto della materia a
cui la grandezza fisica è associata. Pertanto possiamo potremmo parlare di onde di temperatura, di
pressione e altro. Se la grandezza di cui si osserva la propagazione è la variazione della posizione e il
meccanismo di propagazione è una forza che si esercita tra punti vicini di un mezzo materiale allora
parliamo di onde elastiche. Quello che diremo per questo tipo di onde vale, in generale, anche per altri tipi
di onde (onde sonore, onde elettromagnetiche). Non discuteremo in questa sezione di importanti fenomeni
come lo smorzamento (perdita di energia associata all’onda durante la sua propagazione), assorbimento
(trasformazione dell’energia dell’onda in altre forme di energia), dispersione (modificazione della frequenza
dell’onda).
Un esempio di onde elastiche: le onde trasversali in una corda tesa
Supponiamo di tenere con una mano un’estremità di una lunga corda tesa orizzontalmente, che abbia
l’altra estremità fissata a una parete. Se imprimiamo con la mano una leggera oscillazione verticale,
l’oscillazione si propaga lungo la corda, comunicandosi alle sue successive porzioni che via via si mettono in
movimento: abbiamo generato un’onda che si propaga lungo la corda
Generazione di una onda su una corda
Perché l’onda si propaga lungo la corda? Quando l’estremo della corda viene spostato, per esempio verso
l’alto, tende a trascinare con sé la porzione di corda più vicina, esercitando su di essa una forza. Ma a causa
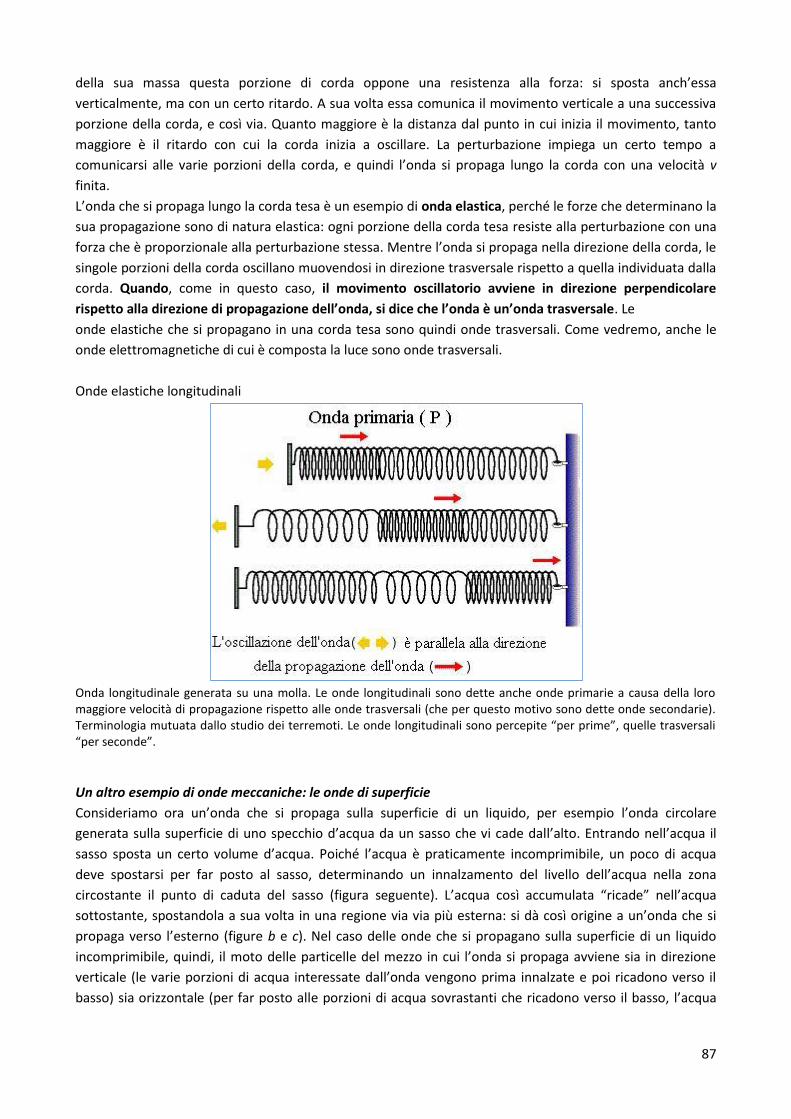
87
della sua massa questa porzione di corda oppone una resistenza alla forza: si sposta anch’essa
verticalmente, ma con un certo ritardo. A sua volta essa comunica il movimento verticale a una successiva
porzione della corda, e così via. Quanto maggiore è la distanza dal punto in cui inizia il movimento, tanto
maggiore è il ritardo con cui la corda inizia a oscillare. La perturbazione impiega un certo tempo a
comunicarsi alle varie porzioni della corda, e quindi l’onda si propaga lungo la corda con una velocità v
finita.
L’onda che si propaga lungo la corda tesa è un esempio di onda elastica, perché le forze che determinano la
sua propagazione sono di natura elastica: ogni porzione della corda tesa resiste alla perturbazione con una
forza che è proporzionale alla perturbazione stessa. Mentre l’onda si propaga nella direzione della corda, le
singole porzioni della corda oscillano muovendosi in direzione trasversale rispetto a quella individuata dalla
corda. Quando, come in questo caso, il movimento oscillatorio avviene in direzione perpendicolare
rispetto alla direzione di propagazione dell’onda, si dice che l’onda è un’onda trasversale. Le
onde elastiche che si propagano in una corda tesa sono quindi onde trasversali. Come vedremo, anche le
onde elettromagnetiche di cui è composta la luce sono onde trasversali.
Onde elastiche longitudinali
Onda longitudinale generata su una molla. Le onde longitudinali sono dette anche onde primarie a causa della loro maggiore velocità di propagazione rispetto alle onde trasversali (che per questo motivo sono dette onde secondarie). Terminologia mutuata dallo studio dei terremoti. Le onde longitudinali sono percepite “per prime”, quelle trasversali “per seconde”.
Un altro esempio di onde meccaniche: le onde di superficie
Consideriamo ora un’onda che si propaga sulla superficie di un liquido, per esempio l’onda circolare
generata sulla superficie di uno specchio d’acqua da un sasso che vi cade dall’alto. Entrando nell’acqua il
sasso sposta un certo volume d’acqua. Poiché l’acqua è praticamente incomprimibile, un poco di acqua
deve spostarsi per far posto al sasso, determinando un innalzamento del livello dell’acqua nella zona
circostante il punto di caduta del sasso (figura seguente). L’acqua così accumulata “ricade” nell’acqua
sottostante, spostandola a sua volta in una regione via via più esterna: si dà così origine a un’onda che si
propaga verso l’esterno (figure b e c). Nel caso delle onde che si propagano sulla superficie di un liquido
incomprimibile, quindi, il moto delle particelle del mezzo in cui l’onda si propaga avviene sia in direzione
verticale (le varie porzioni di acqua interessate dall’onda vengono prima innalzate e poi ricadono verso il
basso) sia orizzontale (per far posto alle porzioni di acqua sovrastanti che ricadono verso il basso, l’acqua
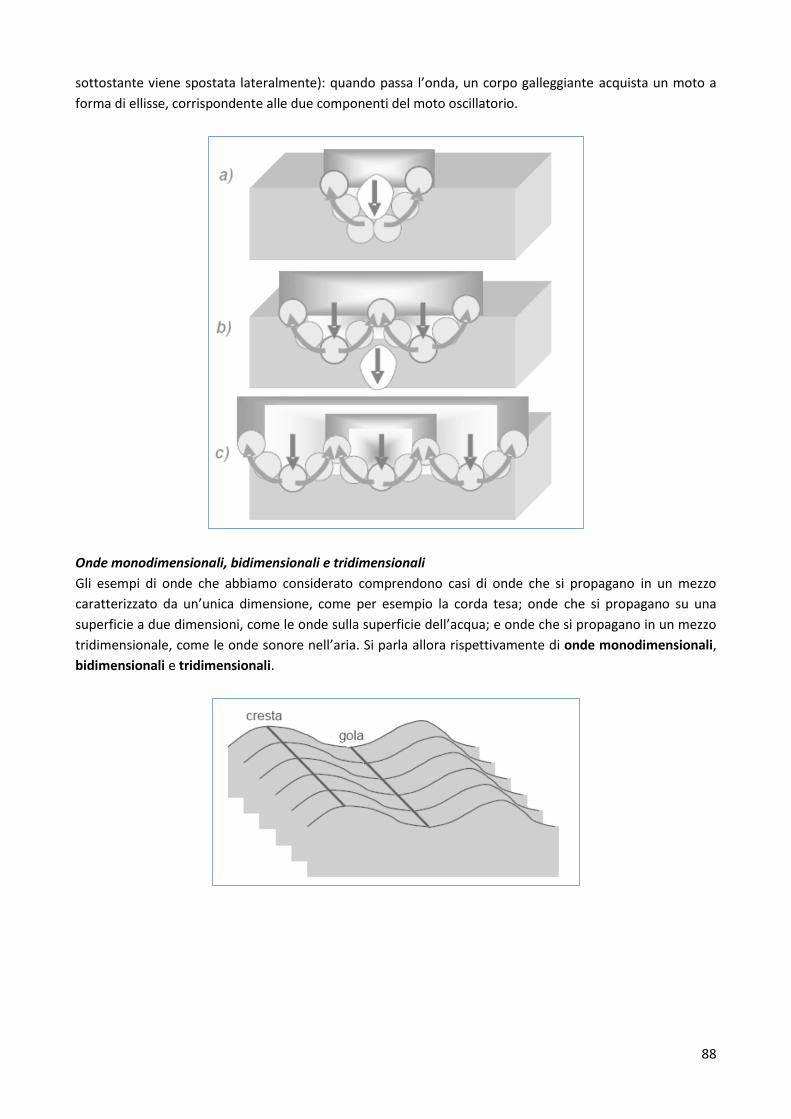
88
sottostante viene spostata lateralmente): quando passa l’onda, un corpo galleggiante acquista un moto a
forma di ellisse, corrispondente alle due componenti del moto oscillatorio.
Onde monodimensionali, bidimensionali e tridimensionali
Gli esempi di onde che abbiamo considerato comprendono casi di onde che si propagano in un mezzo
caratterizzato da un’unica dimensione, come per esempio la corda tesa; onde che si propagano su una
superficie a due dimensioni, come le onde sulla superficie dell’acqua; e onde che si propagano in un mezzo
tridimensionale, come le onde sonore nell’aria. Si parla allora rispettivamente di onde monodimensionali,
bidimensionali e tridimensionali.
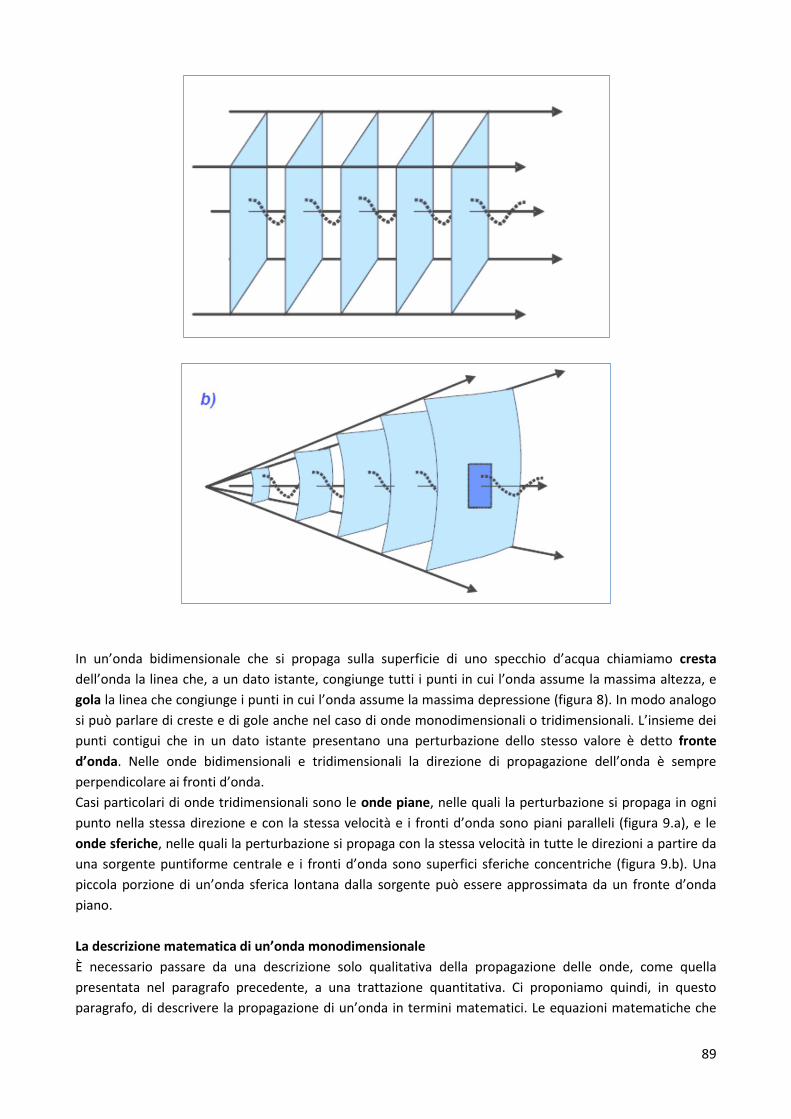
89
In un’onda bidimensionale che si propaga sulla superficie di uno specchio d’acqua chiamiamo cresta
dell’onda la linea che, a un dato istante, congiunge tutti i punti in cui l’onda assume la massima altezza, e
gola la linea che congiunge i punti in cui l’onda assume la massima depressione (figura 8). In modo analogo
si può parlare di creste e di gole anche nel caso di onde monodimensionali o tridimensionali. L’insieme dei
punti contigui che in un dato istante presentano una perturbazione dello stesso valore è detto fronte
d’onda. Nelle onde bidimensionali e tridimensionali la direzione di propagazione dell’onda è sempre
perpendicolare ai fronti d’onda.
Casi particolari di onde tridimensionali sono le onde piane, nelle quali la perturbazione si propaga in ogni
punto nella stessa direzione e con la stessa velocità e i fronti d’onda sono piani paralleli (figura 9.a), e le
onde sferiche, nelle quali la perturbazione si propaga con la stessa velocità in tutte le direzioni a partire da
una sorgente puntiforme centrale e i fronti d’onda sono superfici sferiche concentriche (figura 9.b). Una
piccola porzione di un’onda sferica lontana dalla sorgente può essere approssimata da un fronte d’onda
piano.
La descrizione matematica di un’onda monodimensionale
È necessario passare da una descrizione solo qualitativa della propagazione delle onde, come quella
presentata nel paragrafo precedente, a una trattazione quantitativa. Ci proponiamo quindi, in questo
paragrafo, di descrivere la propagazione di un’onda in termini matematici. Le equazioni matematiche che
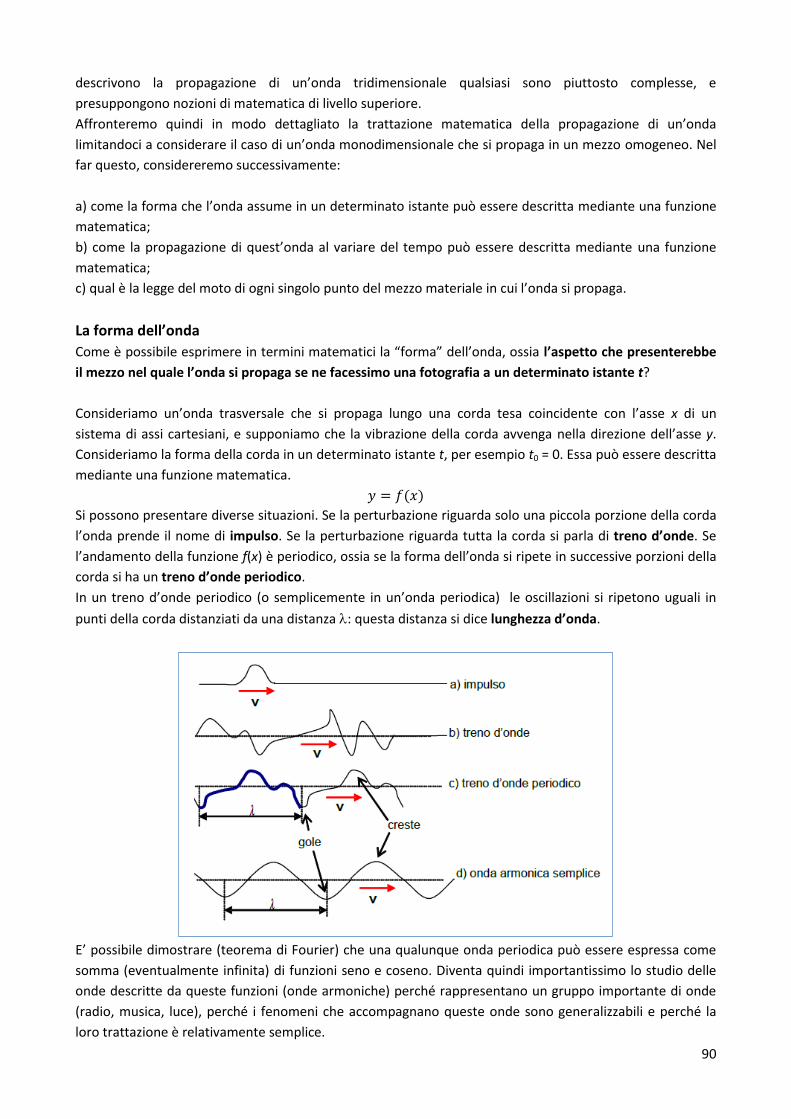
90
descrivono la propagazione di un’onda tridimensionale qualsiasi sono piuttosto complesse, e
presuppongono nozioni di matematica di livello superiore.
Affronteremo quindi in modo dettagliato la trattazione matematica della propagazione di un’onda
limitandoci a considerare il caso di un’onda monodimensionale che si propaga in un mezzo omogeneo. Nel
far questo, considereremo successivamente:
a) come la forma che l’onda assume in un determinato istante può essere descritta mediante una funzione
matematica;
b) come la propagazione di quest’onda al variare del tempo può essere descritta mediante una funzione
matematica;
c) qual è la legge del moto di ogni singolo punto del mezzo materiale in cui l’onda si propaga.
La forma dell’onda
Come è possibile esprimere in termini matematici la “forma” dell’onda, ossia l’aspetto che presenterebbe
il mezzo nel quale l’onda si propaga se ne facessimo una fotografia a un determinato istante t?
Consideriamo un’onda trasversale che si propaga lungo una corda tesa coincidente con l’asse x di un
sistema di assi cartesiani, e supponiamo che la vibrazione della corda avvenga nella direzione dell’asse y.
Consideriamo la forma della corda in un determinato istante t, per esempio t0 = 0. Essa può essere descritta
mediante una funzione matematica.
𝑦 = 𝑓(𝑥)
Si possono presentare diverse situazioni. Se la perturbazione riguarda solo una piccola porzione della corda
l’onda prende il nome di impulso. Se la perturbazione riguarda tutta la corda si parla di treno d’onde. Se
l’andamento della funzione f(x) è periodico, ossia se la forma dell’onda si ripete in successive porzioni della
corda si ha un treno d’onde periodico.
In un treno d’onde periodico (o semplicemente in un’onda periodica) le oscillazioni si ripetono uguali in
punti della corda distanziati da una distanza : questa distanza si dice lunghezza d’onda.
E’ possibile dimostrare (teorema di Fourier) che una qualunque onda periodica può essere espressa come
somma (eventualmente infinita) di funzioni seno e coseno. Diventa quindi importantissimo lo studio delle
onde descritte da queste funzioni (onde armoniche) perché rappresentano un gruppo importante di onde
(radio, musica, luce), perché i fenomeni che accompagnano queste onde sono generalizzabili e perché la
loro trattazione è relativamente semplice.

91
𝐴(𝑥) = 𝐴0𝑠𝑒𝑛(𝑘𝑥)
o più in generale, nel caso in cui il valore della perturbazione nell’origine x = 0 non sia nullo,
𝐴(𝑥) = 𝐴0𝑠𝑒𝑛(𝑘𝑥 + 𝜑0)
dove 𝜑0 è una costante scelta in modo opportuno. Un treno d’onde rappresentato da questo tipo di
funzione si dice onda armonica semplice. Quest’ultima equazione descrive la forma dell’onda in particolare
istante t, per avere una descrizione completa dell’onda rispetto ai due parametri fondamentali: posizione x
e tempo t, cerchiamo una descrizione della forma dell’onda in funzione del tempo e della posizione in
modo da poterne studiare l’evoluzione. Tale descrizione è
𝐴(𝑥, 𝑡) = 𝐴0𝑠𝑒𝑛 (2𝜋𝑡
𝑇− 2𝜋
𝑥
𝜆)
A0: ampiezza dell’onda, rappresenta la variazione massima rispetto alla media della grandezza a cui l’onda è
associata
T è il periodo dell’oscillazione, il tempo impiegato da un punto dell’onda a fare un’oscillazione completa, si
misura in secondi. Associato al periodo T c’è la frequenza f (spesso indicata con la lettera greca “ni”) =
1/T rappresenta, come in qualunque fenomeno periodico, il numero di oscillazioni nell’unità di tempo, si
misura in Hz (Hertz). 1 Hz = 1 s-1.
è la lunghezza d’onda. Rappresenta la distanza minima tra due punti dell’onda che oscillano insieme.
Tale equazione descrive un’onda che si propaga nel verso delle x crescenti. Vale sempre la relazione che
/T = vonda
Nella figura sopra è riporta il grafico (costruito con l’ultima equazione) di una onda avente ampiezza A0 = 5
(unità arbitrarie), lunghezza d’onda = 0.77 m e periodo T = 0.0023 s. (Se si trattasse di un onda sonora
sarebbe un LA). Il grafico dell’onda è stato riprodotto per diversi valori di del tempo. T corrispondenti a
frazioni esatte del periodo. Si osserva chiaramente “il moto” dell’onda nel verso delle X crescenti. Se
Osserviamo i due grafici estremi (quello a linea continua e quello con tratto e due punti) osserviamo che in
opposizione di fase, cioè dove il primo ha una cresta, il secondo ha una gola, è come se il secondo fosse
“più avanti” del primo di una tratto corrispondente a mezza lunghezza d’onda, questo spazio in avanti lo si
osserva dopo un tempo corrispondente a metà del periodo. La velocità di propagazione dell’onda è
calcolabile come spazio diviso tempo
𝑣𝑝𝑟𝑜𝑝𝑎𝑔𝑎𝑧𝑖𝑜𝑛𝑒 = 𝑠𝑝𝑎𝑧𝑖𝑜
𝑡𝑒𝑚𝑝𝑜 =
𝜆
𝑇
-6-5-4-3-2-10123456
0 0.5 1 1.5 2 2.5
Posizione X (m) (= 0.77 m)
Onda armonica a diversi istanti
t/T = 0
t/T = 0.1
t/T = 0.2
t/T = 0.3
t/T = 0.4
t/T = 0.5

92
Nel nostro caso = 0.77, T = 0.0023 s, quindi la velocità v = 0.77/0.0023 = 335m/s (la velocità del suono in
aria). Vale la pena ricordare che le funzioni seno e coseno sono funzioni goniometriche, cioè dell’angolo.
L’argomento della funzione deve, quindi, essere un angolo. È per questo che sia il rapporto tempo su
periodo sia quello posizione su lunghezza d’onda è moltiplicato per 2, che rappresenta l’angolo giro in
radianti. Ricordiamo che un moto armonico (e quindi un onda armonica) può essere immaginato come
proiezione unidimensionale di un moto circolare uniforme
Con questa analogia in mente possiamo parlare di velocità angolare e numero d’onda:
velocità angolare 𝜔 = 2𝜋
𝑇 (rad/sec) numero d’onda 𝑘 =
2𝜋
𝜆 (rad/metri)
Allora, per un onda che si propaga verso le x crescenti, l’equazione assume la seguente forma
𝐴(𝑥, 𝑡) = 𝐴0𝑠𝑒𝑛(𝜔𝑡 − 𝑘𝑥)
Notiamo che per descrivere un onda che si propaga nel verso positivo (x crescenti) è necessario avere una
funzione della differenza tra x/ e t/T, una funzione della somma di queste due grandezze descrive un onda
che si propaga nel verso negativo (x decrescenti).
Velocità delle onde
Si consideri una corda inestensibile tesa con tensione T e sia m la sua massa e L la sua lunghezza, possiamo
definire la densità lineare μ = m/L. Supponiamo che tale densità sia uniforme. Si supponga inoltre che, in
seguito ad una sollecitazione da parte di una forza esterna, si formi un’onda che si propaga lungo la corda
stessa. Si vuole determinare quale sia la velocità di tale onda. La parte centrale dell’impulso sulla corda può
essere approssimata come un arco di circonferenza di raggio R e apertura . Se l’angolo è espresso in
radianti la lunghezza della circonferenza sarà R e la massa di quel tratto di corda dm = RPoiché la
forma è un circonferenza su una massa dm agisce la forza centripeta che determinata dalla somma
vettoriale delle tensioni che agiscono ai margini del tratto dm. Quindi, ipotizzando a molto piccolo,
𝜏 = 𝑑𝑚 𝑣2
𝑅
𝑇𝛼 = 𝑅𝛼𝜇 𝑣2
𝑅
Semplificando il raggio di curvatura R e l’angolo , si ricava
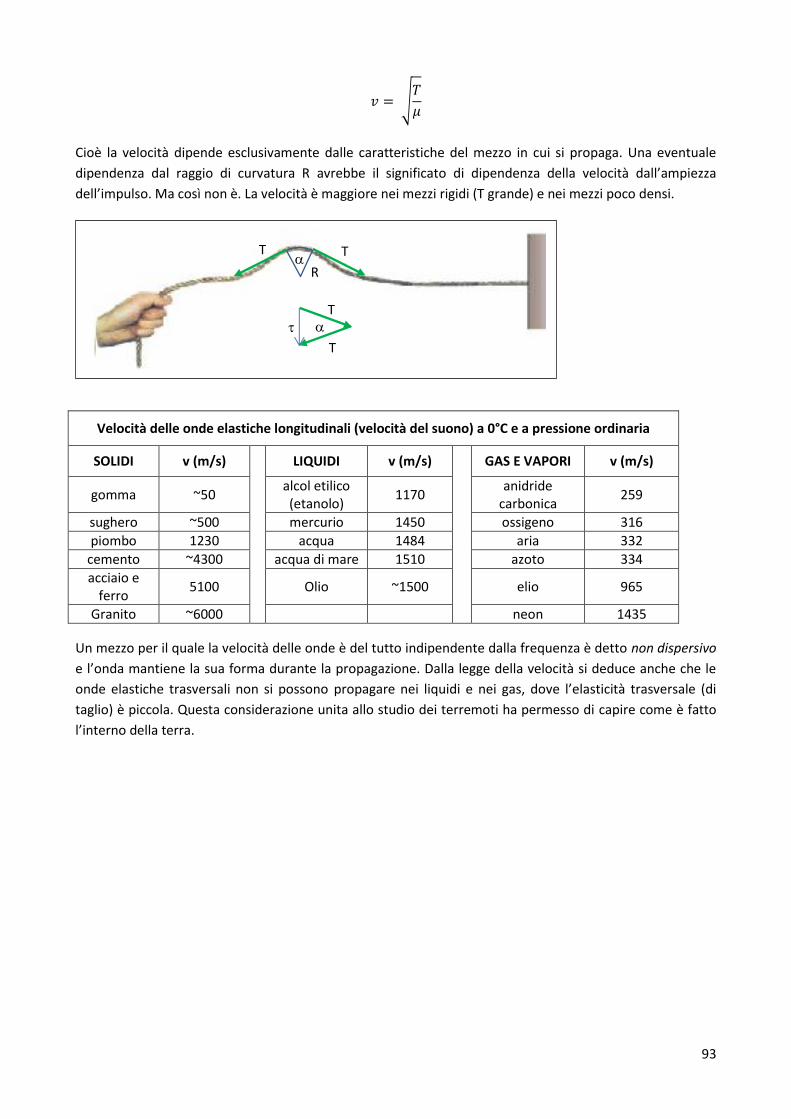
93
𝑣 = √𝑇
𝜇
Cioè la velocità dipende esclusivamente dalle caratteristiche del mezzo in cui si propaga. Una eventuale
dipendenza dal raggio di curvatura R avrebbe il significato di dipendenza della velocità dall’ampiezza
dell’impulso. Ma così non è. La velocità è maggiore nei mezzi rigidi (T grande) e nei mezzi poco densi.
Velocità delle onde elastiche longitudinali (velocità del suono) a 0°C e a pressione ordinaria
SOLIDI v (m/s) LIQUIDI v (m/s) GAS E VAPORI v (m/s)
gomma ~50 alcol etilico (etanolo)
1170 anidride
carbonica 259
sughero ~500 mercurio 1450 ossigeno 316
piombo 1230 acqua 1484 aria 332
cemento ~4300 acqua di mare 1510 azoto 334
acciaio e ferro
5100 Olio ~1500 elio 965
Granito ~6000 neon 1435
Un mezzo per il quale la velocità delle onde è del tutto indipendente dalla frequenza è detto non dispersivo
e l’onda mantiene la sua forma durante la propagazione. Dalla legge della velocità si deduce anche che le
onde elastiche trasversali non si possono propagare nei liquidi e nei gas, dove l’elasticità trasversale (di
taglio) è piccola. Questa considerazione unita allo studio dei terremoti ha permesso di capire come è fatto
l’interno della terra.
T T
R
T
T
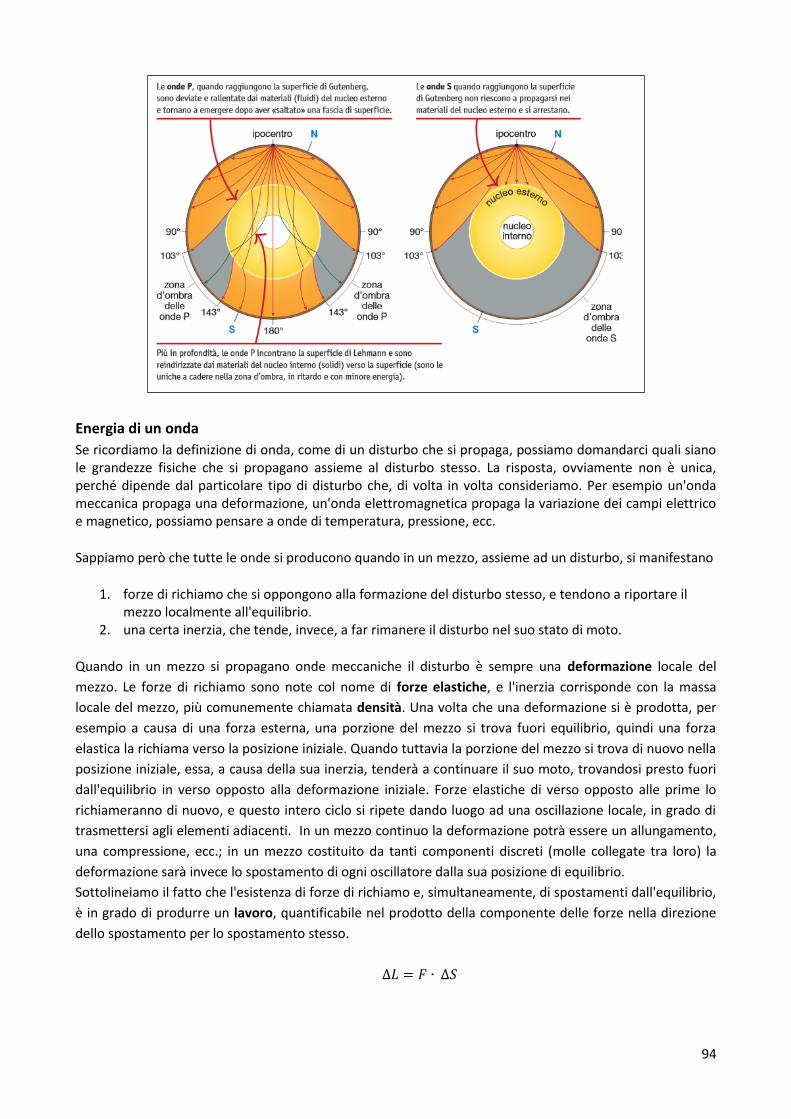
94
Energia di un onda
Se ricordiamo la definizione di onda, come di un disturbo che si propaga, possiamo domandarci quali siano le grandezze fisiche che si propagano assieme al disturbo stesso. La risposta, ovviamente non è unica, perché dipende dal particolare tipo di disturbo che, di volta in volta consideriamo. Per esempio un'onda meccanica propaga una deformazione, un'onda elettromagnetica propaga la variazione dei campi elettrico e magnetico, possiamo pensare a onde di temperatura, pressione, ecc.
Sappiamo però che tutte le onde si producono quando in un mezzo, assieme ad un disturbo, si manifestano
1. forze di richiamo che si oppongono alla formazione del disturbo stesso, e tendono a riportare il mezzo localmente all'equilibrio.
2. una certa inerzia, che tende, invece, a far rimanere il disturbo nel suo stato di moto.
Quando in un mezzo si propagano onde meccaniche il disturbo è sempre una deformazione locale del
mezzo. Le forze di richiamo sono note col nome di forze elastiche, e l'inerzia corrisponde con la massa
locale del mezzo, più comunemente chiamata densità. Una volta che una deformazione si è prodotta, per
esempio a causa di una forza esterna, una porzione del mezzo si trova fuori equilibrio, quindi una forza
elastica la richiama verso la posizione iniziale. Quando tuttavia la porzione del mezzo si trova di nuovo nella
posizione iniziale, essa, a causa della sua inerzia, tenderà a continuare il suo moto, trovandosi presto fuori
dall'equilibrio in verso opposto alla deformazione iniziale. Forze elastiche di verso opposto alle prime lo
richiameranno di nuovo, e questo intero ciclo si ripete dando luogo ad una oscillazione locale, in grado di
trasmettersi agli elementi adiacenti. In un mezzo continuo la deformazione potrà essere un allungamento,
una compressione, ecc.; in un mezzo costituito da tanti componenti discreti (molle collegate tra loro) la
deformazione sarà invece lo spostamento di ogni oscillatore dalla sua posizione di equilibrio.
Sottolineiamo il fatto che l'esistenza di forze di richiamo e, simultaneamente, di spostamenti dall'equilibrio,
è in grado di produrre un lavoro, quantificabile nel prodotto della componente delle forze nella direzione
dello spostamento per lo spostamento stesso.
∆𝐿 = 𝐹 ∙ ∆𝑆

95
Ma in fisica la capacità di produrre lavoro si chiama energia. Immaginiamo allora una corda percorsa da
un'onda trasversale possiamo distinguere due tipi di energia:
1. l'energia cinetica che è l'energia che ogni porzione della corda possiede a causa della
propria velocità trasversale di oscillazione.
2. l'energia potenziale, che è l'energia dovuta alla deformazione elastica della corda.
Durante il moto oscillatorio queste due energie si trasformano alternativamente l'una nell'altra. Ma
attenzione: la corda non è un punto materiale, bensì un corpo continuo. Ciò significa che queste due
energie non sono concentrate in un punto preciso, ma sono distribuite lungo tutta la corda. Quindi il loro
calcolo non è semplice come per un punto materiale.
La grandezza localmente rilevante non è l'energia totale, ma l'energia per unità di lunghezza, o densità di
energia. A differenza dell'energia totale, che si conserva invariata durante tutto il moto, la densità di
energia può variare localmente col tempo. Essa può trasferirsi da un punto all'altro della corda. Anzi,
precisamente questa quantità si muove insieme con l'onda che percorre la corda, e alla stessa velocità.
In ogni punto della corda
La densità di energia potenziale è massima quando l'elemento di corda si trova nella posizione di
massima deformazione compatibile con i vincoli in quel punto.
La densità di energia cinetica è massima quando l'elemento di corda possiede la massima velocità.
Per semplificare ulteriormente immaginiamo che la corda oscilli di moto armonico. L'energia totale (cioè la
somma della sua energia cinetica e potenziale) di un oscillatore armonico di massa m, che oscilli ad una
pulsazione ω con ampiezza A è facile da calcolare, e vale
𝐸𝑡𝑜𝑡 = 1
2 𝑚 𝜔2𝐴2
Tuttavia abbiamo detto che, nel caso della corda, che è un continuo di oscillatori con massa per unità di
lunghezza (densità) , quindi non ci interessa tanto l'energia totale, ma l'energia per unità di lunghezza
(densità di energia). Essa vale
𝐸𝑝𝑒𝑟 𝑈𝑑𝐿 = 1
2 𝜇 𝜔2𝐴2
Abbiamo anche detto che questa densità viaggia alla velocità v con cui l'onda si propaga lungo la corda.
Quindi la grandezza finale cui siamo interessati è il prodotto della densità di energia per la velocità
𝑊 = 𝐸 ∙ 𝑣 = 1
2 𝜇 𝜔2𝐴2 𝑣
che ha le dimensioni di una potenza (Watt), e indica esattamente il flusso di energia, cioè la quantità di
energia che passa per un certo punto della corda nell'unità di tempo, trasportato dall'onda. Se pensiamo
alla grandezza equivalente in una situazione tridimensionale, anziché sulla nostra corda unidimensionale, la
grandezza diviene un vettore, e si misura in W/m2. Essa indica la quantità di energia che fluisce attraverso
l'unità di superficie in una certa direzione nell'unità di tempo. Il concetto si applica a tutte le forme di
energia, ed è particolarmente adatto a descrivere il fenomeno dell'irraggiamento dell'energia, sia essa
luminosa, sonora, ecc. Molto spesso, poiché il flusso di energia è provocato da onde, si usa misurarne la
media in un dato periodo di tempo, e la grandezza risultante si dice intensità del campo che produce il
flusso. Questa è, per esempio la definizione fisica di intensità sonora.
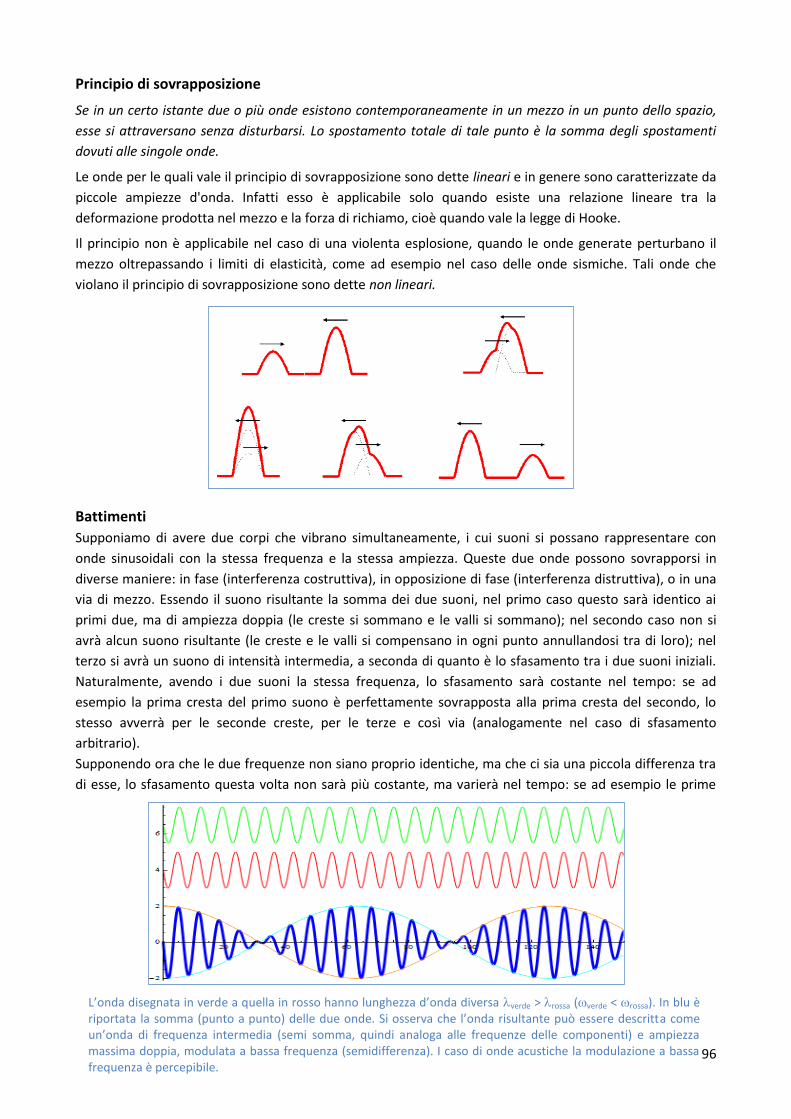
96
Principio di sovrapposizione
Se in un certo istante due o più onde esistono contemporaneamente in un mezzo in un punto dello spazio,
esse si attraversano senza disturbarsi. Lo spostamento totale di tale punto è la somma degli spostamenti
dovuti alle singole onde.
Le onde per le quali vale il principio di sovrapposizione sono dette lineari e in genere sono caratterizzate da
piccole ampiezze d'onda. Infatti esso è applicabile solo quando esiste una relazione lineare tra la
deformazione prodotta nel mezzo e la forza di richiamo, cioè quando vale la legge di Hooke.
Il principio non è applicabile nel caso di una violenta esplosione, quando le onde generate perturbano il
mezzo oltrepassando i limiti di elasticità, come ad esempio nel caso delle onde sismiche. Tali onde che
violano il principio di sovrapposizione sono dette non lineari.
Battimenti
Supponiamo di avere due corpi che vibrano simultaneamente, i cui suoni si possano rappresentare con
onde sinusoidali con la stessa frequenza e la stessa ampiezza. Queste due onde possono sovrapporsi in
diverse maniere: in fase (interferenza costruttiva), in opposizione di fase (interferenza distruttiva), o in una
via di mezzo. Essendo il suono risultante la somma dei due suoni, nel primo caso questo sarà identico ai
primi due, ma di ampiezza doppia (le creste si sommano e le valli si sommano); nel secondo caso non si
avrà alcun suono risultante (le creste e le valli si compensano in ogni punto annullandosi tra di loro); nel
terzo si avrà un suono di intensità intermedia, a seconda di quanto è lo sfasamento tra i due suoni iniziali.
Naturalmente, avendo i due suoni la stessa frequenza, lo sfasamento sarà costante nel tempo: se ad
esempio la prima cresta del primo suono è perfettamente sovrapposta alla prima cresta del secondo, lo
stesso avverrà per le seconde creste, per le terze e così via (analogamente nel caso di sfasamento
arbitrario).
Supponendo ora che le due frequenze non siano proprio identiche, ma che ci sia una piccola differenza tra
di esse, lo sfasamento questa volta non sarà più costante, ma varierà nel tempo: se ad esempio le prime
L’onda disegnata in verde a quella in rosso hanno lunghezza d’onda diversa verde > rossa (verde < rossa). In blu è riportata la somma (punto a punto) delle due onde. Si osserva che l’onda risultante può essere descritta come un’onda di frequenza intermedia (semi somma, quindi analoga alle frequenze delle componenti) e ampiezza massima doppia, modulata a bassa frequenza (semidifferenza). I caso di onde acustiche la modulazione a bassa frequenza è percepibile.
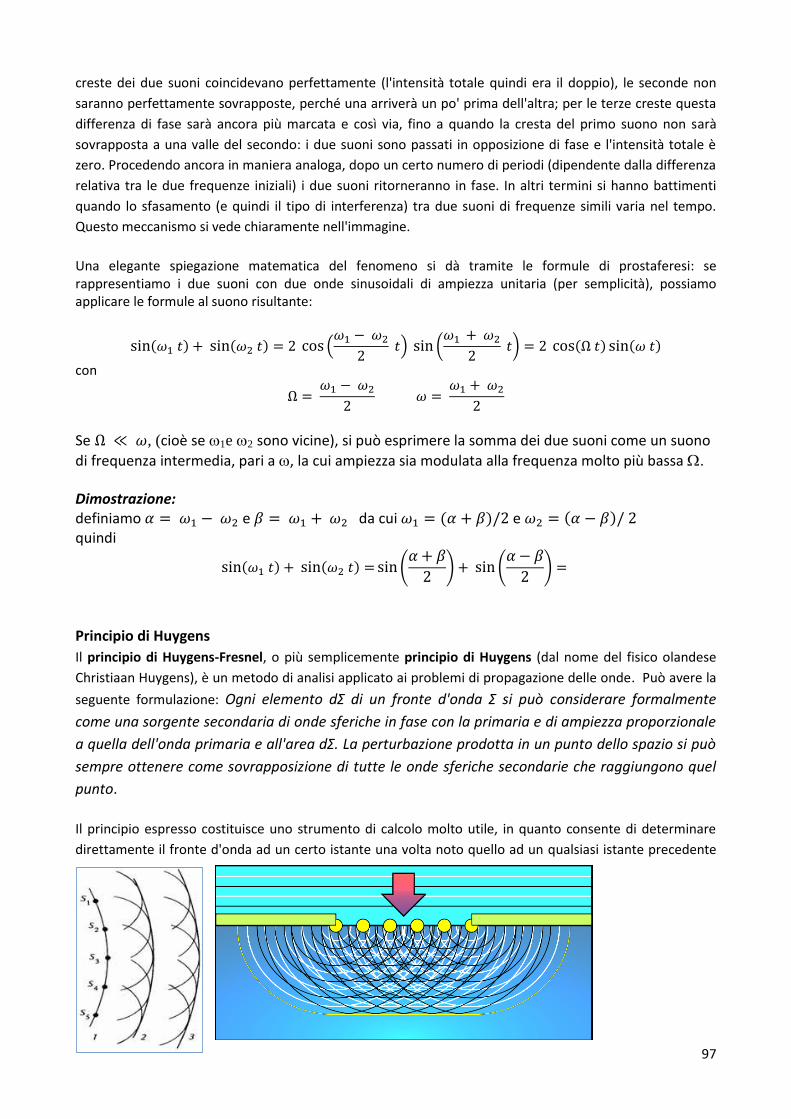
97
creste dei due suoni coincidevano perfettamente (l'intensità totale quindi era il doppio), le seconde non
saranno perfettamente sovrapposte, perché una arriverà un po' prima dell'altra; per le terze creste questa
differenza di fase sarà ancora più marcata e così via, fino a quando la cresta del primo suono non sarà
sovrapposta a una valle del secondo: i due suoni sono passati in opposizione di fase e l'intensità totale è
zero. Procedendo ancora in maniera analoga, dopo un certo numero di periodi (dipendente dalla differenza
relativa tra le due frequenze iniziali) i due suoni ritorneranno in fase. In altri termini si hanno battimenti
quando lo sfasamento (e quindi il tipo di interferenza) tra due suoni di frequenze simili varia nel tempo.
Questo meccanismo si vede chiaramente nell'immagine.
Una elegante spiegazione matematica del fenomeno si dà tramite le formule di prostaferesi: se rappresentiamo i due suoni con due onde sinusoidali di ampiezza unitaria (per semplicità), possiamo applicare le formule al suono risultante:
sin(𝜔1 𝑡) + sin(𝜔2 𝑡) = 2 cos (𝜔1 − 𝜔2
2 𝑡) sin (
𝜔1 + 𝜔2
2 𝑡) = 2 cos(Ω 𝑡) sin(𝜔 𝑡)
con
Ω = 𝜔1 − 𝜔2
2 𝜔 =
𝜔1 + 𝜔2
2
Se Ω ≪ 𝜔, (cioè se 1e 2 sono vicine), si può esprimere la somma dei due suoni come un suono
di frequenza intermedia, pari a , la cui ampiezza sia modulata alla frequenza molto più bassa .
Dimostrazione: definiamo 𝛼 = 𝜔1 − 𝜔2 e 𝛽 = 𝜔1 + 𝜔2 da cui 𝜔1 = (𝛼 + 𝛽)/2 e 𝜔2 = (𝛼 − 𝛽)/ 2 quindi
sin(𝜔1 𝑡) + sin(𝜔2 𝑡) = sin (𝛼 + 𝛽
2) + sin (
𝛼 − 𝛽
2) =
Principio di Huygens
Il principio di Huygens-Fresnel, o più semplicemente principio di Huygens (dal nome del fisico olandese
Christiaan Huygens), è un metodo di analisi applicato ai problemi di propagazione delle onde. Può avere la
seguente formulazione: Ogni elemento dΣ di un fronte d'onda Σ si può considerare formalmente
come una sorgente secondaria di onde sferiche in fase con la primaria e di ampiezza proporzionale
a quella dell'onda primaria e all'area dΣ. La perturbazione prodotta in un punto dello spazio si può
sempre ottenere come sovrapposizione di tutte le onde sferiche secondarie che raggiungono quel
punto.
Il principio espresso costituisce uno strumento di calcolo molto utile, in quanto consente di determinare
direttamente il fronte d'onda ad un certo istante una volta noto quello ad un qualsiasi istante precedente
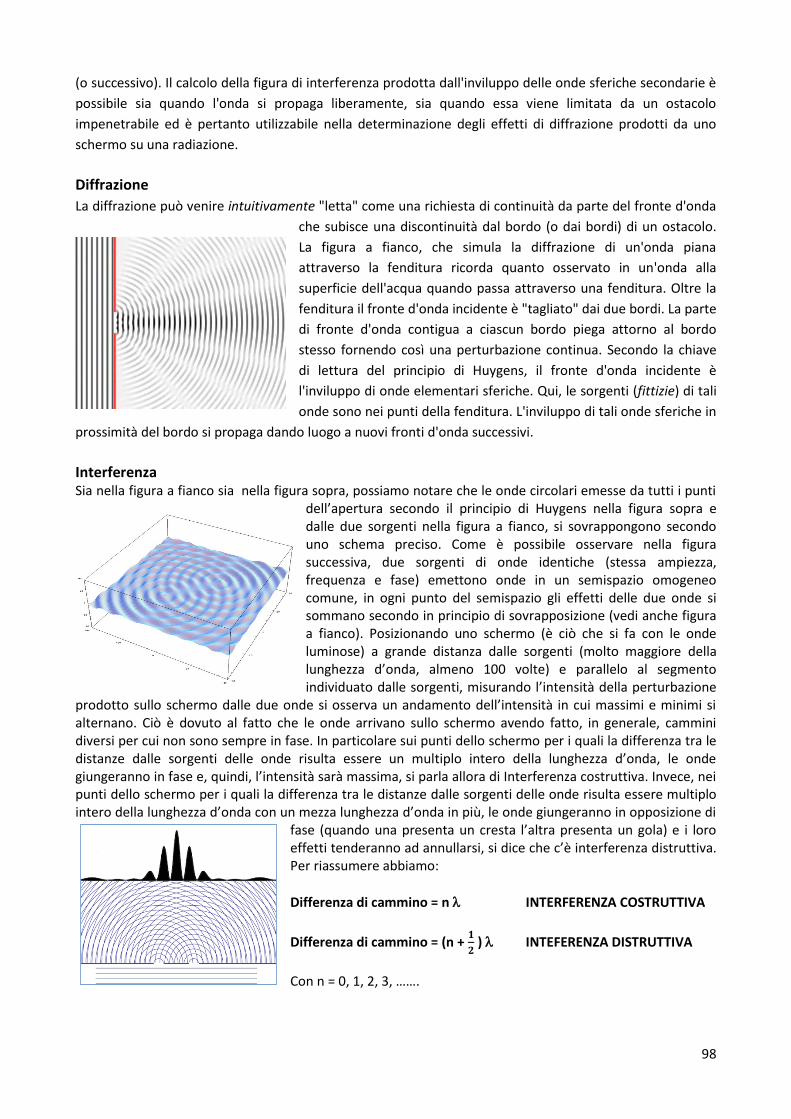
98
(o successivo). Il calcolo della figura di interferenza prodotta dall'inviluppo delle onde sferiche secondarie è
possibile sia quando l'onda si propaga liberamente, sia quando essa viene limitata da un ostacolo
impenetrabile ed è pertanto utilizzabile nella determinazione degli effetti di diffrazione prodotti da uno
schermo su una radiazione.
Diffrazione
La diffrazione può venire intuitivamente "letta" come una richiesta di continuità da parte del fronte d'onda
che subisce una discontinuità dal bordo (o dai bordi) di un ostacolo.
La figura a fianco, che simula la diffrazione di un'onda piana
attraverso la fenditura ricorda quanto osservato in un'onda alla
superficie dell'acqua quando passa attraverso una fenditura. Oltre la
fenditura il fronte d'onda incidente è "tagliato" dai due bordi. La parte
di fronte d'onda contigua a ciascun bordo piega attorno al bordo
stesso fornendo così una perturbazione continua. Secondo la chiave
di lettura del principio di Huygens, il fronte d'onda incidente è
l'inviluppo di onde elementari sferiche. Qui, le sorgenti (fittizie) di tali
onde sono nei punti della fenditura. L'inviluppo di tali onde sferiche in
prossimità del bordo si propaga dando luogo a nuovi fronti d'onda successivi.
Interferenza Sia nella figura a fianco sia nella figura sopra, possiamo notare che le onde circolari emesse da tutti i punti
dell’apertura secondo il principio di Huygens nella figura sopra e dalle due sorgenti nella figura a fianco, si sovrappongono secondo uno schema preciso. Come è possibile osservare nella figura successiva, due sorgenti di onde identiche (stessa ampiezza, frequenza e fase) emettono onde in un semispazio omogeneo comune, in ogni punto del semispazio gli effetti delle due onde si sommano secondo in principio di sovrapposizione (vedi anche figura a fianco). Posizionando uno schermo (è ciò che si fa con le onde luminose) a grande distanza dalle sorgenti (molto maggiore della lunghezza d’onda, almeno 100 volte) e parallelo al segmento individuato dalle sorgenti, misurando l’intensità della perturbazione
prodotto sullo schermo dalle due onde si osserva un andamento dell’intensità in cui massimi e minimi si alternano. Ciò è dovuto al fatto che le onde arrivano sullo schermo avendo fatto, in generale, cammini diversi per cui non sono sempre in fase. In particolare sui punti dello schermo per i quali la differenza tra le distanze dalle sorgenti delle onde risulta essere un multiplo intero della lunghezza d’onda, le onde giungeranno in fase e, quindi, l’intensità sarà massima, si parla allora di Interferenza costruttiva. Invece, nei punti dello schermo per i quali la differenza tra le distanze dalle sorgenti delle onde risulta essere multiplo intero della lunghezza d’onda con un mezza lunghezza d’onda in più, le onde giungeranno in opposizione di
fase (quando una presenta un cresta l’altra presenta un gola) e i loro effetti tenderanno ad annullarsi, si dice che c’è interferenza distruttiva. Per riassumere abbiamo:
Differenza di cammino = n INTERFERENZA COSTRUTTIVA
Differenza di cammino = (n + 𝟏
𝟐 ) INTEFERENZA DISTRUTTIVA
Con n = 0, 1, 2, 3, …….
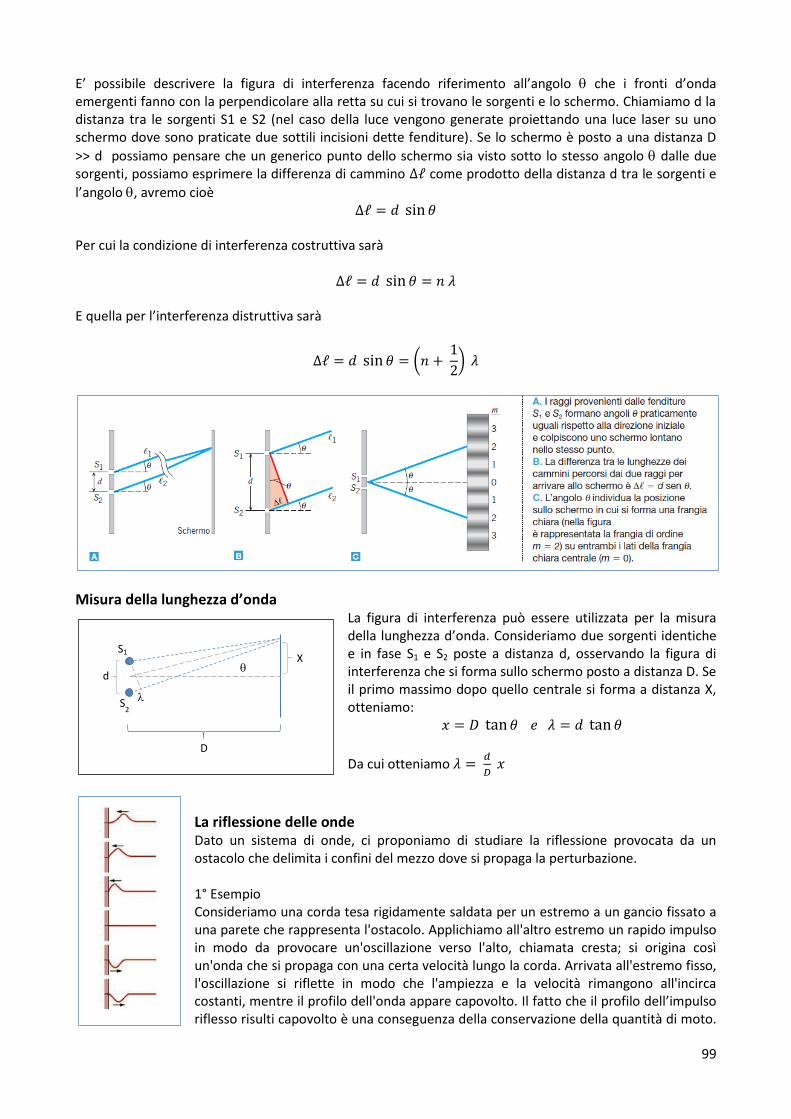
99
E’ possibile descrivere la figura di interferenza facendo riferimento all’angolo che i fronti d’onda emergenti fanno con la perpendicolare alla retta su cui si trovano le sorgenti e lo schermo. Chiamiamo d la distanza tra le sorgenti S1 e S2 (nel caso della luce vengono generate proiettando una luce laser su uno schermo dove sono praticate due sottili incisioni dette fenditure). Se lo schermo è posto a una distanza D
>> d possiamo pensare che un generico punto dello schermo sia visto sotto lo stesso angolo dalle due sorgenti, possiamo esprimere la differenza di cammino ∆ℓ come prodotto della distanza d tra le sorgenti e
l’angolo , avremo cioè ∆ℓ = 𝑑 sin 𝜃
Per cui la condizione di interferenza costruttiva sarà
∆ℓ = 𝑑 sin 𝜃 = 𝑛 𝜆 E quella per l’interferenza distruttiva sarà
∆ℓ = 𝑑 sin 𝜃 = (𝑛 + 1
2) 𝜆
Misura della lunghezza d’onda La figura di interferenza può essere utilizzata per la misura della lunghezza d’onda. Consideriamo due sorgenti identiche e in fase S1 e S2 poste a distanza d, osservando la figura di interferenza che si forma sullo schermo posto a distanza D. Se il primo massimo dopo quello centrale si forma a distanza X, otteniamo:
𝑥 = 𝐷 tan 𝜃 𝑒 𝜆 = 𝑑 tan 𝜃
Da cui otteniamo 𝜆 = 𝑑
𝐷 𝑥
La riflessione delle onde Dato un sistema di onde, ci proponiamo di studiare la riflessione provocata da un ostacolo che delimita i confini del mezzo dove si propaga la perturbazione. 1° Esempio Consideriamo una corda tesa rigidamente saldata per un estremo a un gancio fissato a una parete che rappresenta l'ostacolo. Applichiamo all'altro estremo un rapido impulso in modo da provocare un'oscillazione verso l'alto, chiamata cresta; si origina così un'onda che si propaga con una certa velocità lungo la corda. Arrivata all'estremo fisso, l'oscillazione si riflette in modo che l'ampiezza e la velocità rimangono all'incirca costanti, mentre il profilo dell'onda appare capovolto. Il fatto che il profilo dell’impulso riflesso risulti capovolto è una conseguenza della conservazione della quantità di moto.
S1
S2
X
D
d
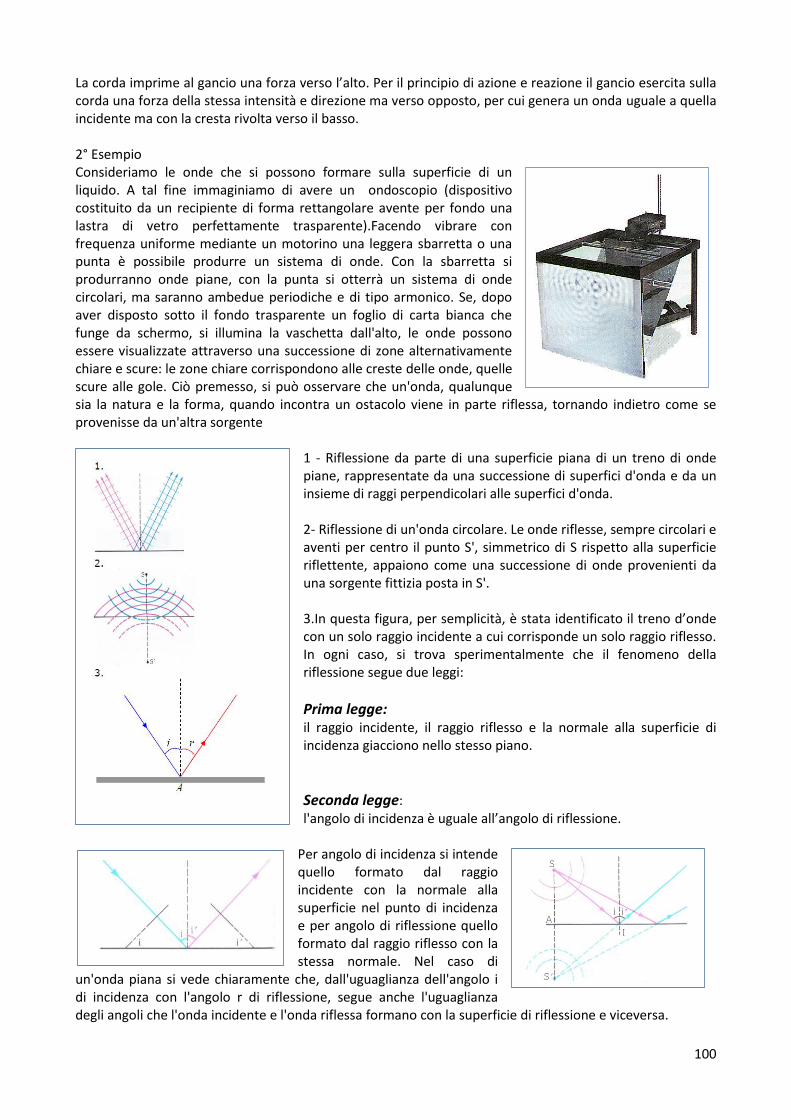
100
La corda imprime al gancio una forza verso l’alto. Per il principio di azione e reazione il gancio esercita sulla corda una forza della stessa intensità e direzione ma verso opposto, per cui genera un onda uguale a quella incidente ma con la cresta rivolta verso il basso. 2° Esempio Consideriamo le onde che si possono formare sulla superficie di un liquido. A tal fine immaginiamo di avere un ondoscopio (dispositivo costituito da un recipiente di forma rettangolare avente per fondo una lastra di vetro perfettamente trasparente).Facendo vibrare con frequenza uniforme mediante un motorino una leggera sbarretta o una punta è possibile produrre un sistema di onde. Con la sbarretta si produrranno onde piane, con la punta si otterrà un sistema di onde circolari, ma saranno ambedue periodiche e di tipo armonico. Se, dopo aver disposto sotto il fondo trasparente un foglio di carta bianca che funge da schermo, si illumina la vaschetta dall'alto, le onde possono essere visualizzate attraverso una successione di zone alternativamente chiare e scure: le zone chiare corrispondono alle creste delle onde, quelle scure alle gole. Ciò premesso, si può osservare che un'onda, qualunque sia la natura e la forma, quando incontra un ostacolo viene in parte riflessa, tornando indietro come se provenisse da un'altra sorgente
1 - Riflessione da parte di una superficie piana di un treno di onde piane, rappresentate da una successione di superfici d'onda e da un insieme di raggi perpendicolari alle superfici d'onda. 2- Riflessione di un'onda circolare. Le onde riflesse, sempre circolari e aventi per centro il punto S', simmetrico di S rispetto alla superficie riflettente, appaiono come una successione di onde provenienti da una sorgente fittizia posta in S'. 3.In questa figura, per semplicità, è stata identificato il treno d’onde con un solo raggio incidente a cui corrisponde un solo raggio riflesso. In ogni caso, si trova sperimentalmente che il fenomeno della riflessione segue due leggi:
Prima legge: il raggio incidente, il raggio riflesso e la normale alla superficie di incidenza giacciono nello stesso piano.
Seconda legge: l'angolo di incidenza è uguale all’angolo di riflessione.
Per angolo di incidenza si intende quello formato dal raggio incidente con la normale alla superficie nel punto di incidenza e per angolo di riflessione quello formato dal raggio riflesso con la stessa normale. Nel caso di
un'onda piana si vede chiaramente che, dall'uguaglianza dell'angolo i di incidenza con l'angolo r di riflessione, segue anche l'uguaglianza degli angoli che l'onda incidente e l'onda riflessa formano con la superficie di riflessione e viceversa.

101
Conseguenze della seconda legge (nel caso di un'onda circolare o sferica.) Nella figura a fianco, S è una sorgente puntiforme e SI è un raggio incidente su una superficie di riflessione. S' è l'intersezione del prolungamento del raggio riflesso con la normale SA alla superficie. I triangoli rettangoli SAI e S'AI hanno il cateto AI in comune e gli angoli acuti in I uguali in quanto complementari degli angoli uguali i e i'. Essi sono perciò uguali e di conseguenza SA è uguale a S'A, cioè S' è il punto simmetrico di S rispetto alla superficie di riflessione. Poiché il ragionamento è stato fatto per un generico raggio incidente SI, possiamo concludere: al fascio omocentrico di raggi incidenti uscenti da S corrisponde dopo la riflessione un fascio di raggi ancora omocentrico con centro in S', precisamente un fascio di raggi i cui prolungamenti passano tutti per S'. Quindi a un treno di onde circolari o sferiche emesse da S corrisponde dopo la riflessione un treno di onde ancora circolari o sferiche con centro nel punto S', simmetrico di S rispetto alla superficie di riflessione. A queste conclusioni siamo pervenuti tenendo conto che l'angolo di incidenza i è uguale all'angolo di riflessione i'. Viceversa, dal fatto che un'onda circolare o sferica si riflette generando ancora un'onda circolare o sferica con centro in S', simmetrico a S, segue che l'angolo di incidenza è uguale all'angolo di riflessione.
Rifrazione Quando un'onda elastica attraversa la superficie di separazione di due mezzi caratterizzati da una diversa velocità di propagazione della perturbazione, essa (se l'angolo di incidenza è diverso da zero) cambia direzione. Tale fenomeno si indica con il nome di rifrazione. Per verificare il fenomeno disponiamo sul fondo di un ondoscopio una lastra di plexiglass, in modo che l'acqua risulti meno profonda nella zona in corrispondenza della lastra. Produciamo un treno di onde piane il cui fronte d'onda sia parallelo alla linea di divisione delle due zone di acqua. Si nota che nella seconda zona, dove l'acqua è meno profonda, le onde sono ancora parallele a quelle della prima zona, però sono più vicine fra loro rispetto alle onde incidenti. Questo fatto evidenzia che, con il diminuire della profondità, diminuisce la lunghezza d'onda.
Poiché con l'ausilio di uno stroboscopio è possibile fermare "contemporaneamente" il movimento delle onde nelle due zone di acqua, possiamo affermare che le onde incidenti e quelle rifratte hanno la stessa frequenza. Tale proprietà è una conseguenza del fatto che le frequenze delle onde nelle due zone di acqua
dipendono solo dalla frequenza della sorgente. Indicando con 1, f1 e 2 e f2 i parametri che caratterizzano rispettivamente l'onda incidente e quella rifratta si ha:
𝜆1 𝑓1 = 𝑣1 𝑒 𝜆2 𝑓2 = 𝑣2 che possiamo anche scrivere facendo il rapporto ed eliminando la frequenza:
𝜆1
𝜆2=
𝑣1
𝑣2
. Ossia, la velocità di propagazione delle onde di una determinata frequenza è minore dove l'acqua è meno
profonda ed è maggiore dove l'acqua è più profonda. Disponiamo ora la lastra di plexiglass sul fondo dell'ondoscopio in modo che la linea di divisione formi un angolo non nullo con le onde incidenti. Considerando come prima un treno di onde piane, si vede chiaramente che le onde rifratte, oltre ad essere più vicine tra loro nella zona d'acqua meno profonda a causa della minore velocità di propagazione, sono anche diversamente inclinate rispetto al
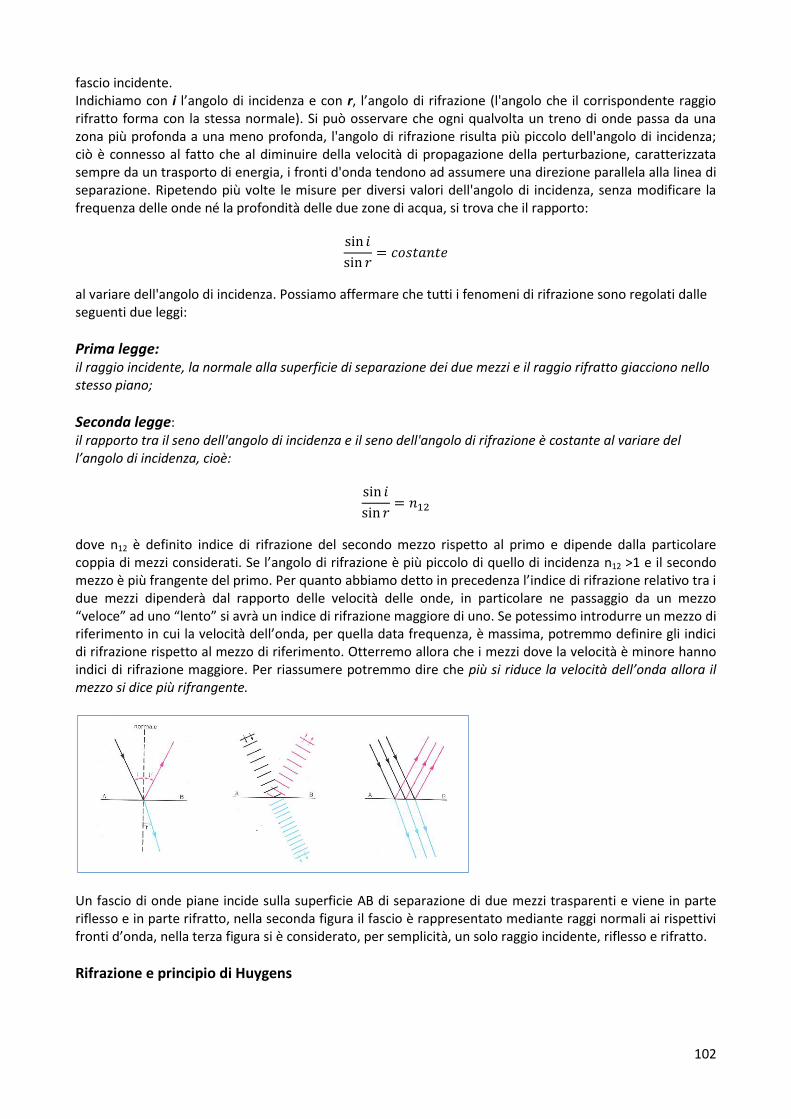
102
fascio incidente. Indichiamo con i l’angolo di incidenza e con r, l’angolo di rifrazione (l'angolo che il corrispondente raggio rifratto forma con la stessa normale). Si può osservare che ogni qualvolta un treno di onde passa da una zona più profonda a una meno profonda, l'angolo di rifrazione risulta più piccolo dell'angolo di incidenza; ciò è connesso al fatto che al diminuire della velocità di propagazione della perturbazione, caratterizzata sempre da un trasporto di energia, i fronti d'onda tendono ad assumere una direzione parallela alla linea di separazione. Ripetendo più volte le misure per diversi valori dell'angolo di incidenza, senza modificare la frequenza delle onde né la profondità delle due zone di acqua, si trova che il rapporto:
sin 𝑖
sin 𝑟= 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒
al variare dell'angolo di incidenza. Possiamo affermare che tutti i fenomeni di rifrazione sono regolati dalle seguenti due leggi:
Prima legge: il raggio incidente, la normale alla superficie di separazione dei due mezzi e il raggio rifratto giacciono nello stesso piano;
Seconda legge: il rapporto tra il seno dell'angolo di incidenza e il seno dell'angolo di rifrazione è costante al variare del l’angolo di incidenza, cioè:
sin 𝑖
sin 𝑟= 𝑛12
dove n12 è definito indice di rifrazione del secondo mezzo rispetto al primo e dipende dalla particolare coppia di mezzi considerati. Se l’angolo di rifrazione è più piccolo di quello di incidenza n12 >1 e il secondo mezzo è più frangente del primo. Per quanto abbiamo detto in precedenza l’indice di rifrazione relativo tra i due mezzi dipenderà dal rapporto delle velocità delle onde, in particolare ne passaggio da un mezzo “veloce” ad uno “lento” si avrà un indice di rifrazione maggiore di uno. Se potessimo introdurre un mezzo di riferimento in cui la velocità dell’onda, per quella data frequenza, è massima, potremmo definire gli indici di rifrazione rispetto al mezzo di riferimento. Otterremo allora che i mezzi dove la velocità è minore hanno indici di rifrazione maggiore. Per riassumere potremmo dire che più si riduce la velocità dell’onda allora il mezzo si dice più rifrangente.
Un fascio di onde piane incide sulla superficie AB di separazione di due mezzi trasparenti e viene in parte riflesso e in parte rifratto, nella seconda figura il fascio è rappresentato mediante raggi normali ai rispettivi fronti d’onda, nella terza figura si è considerato, per semplicità, un solo raggio incidente, riflesso e rifratto.
Rifrazione e principio di Huygens
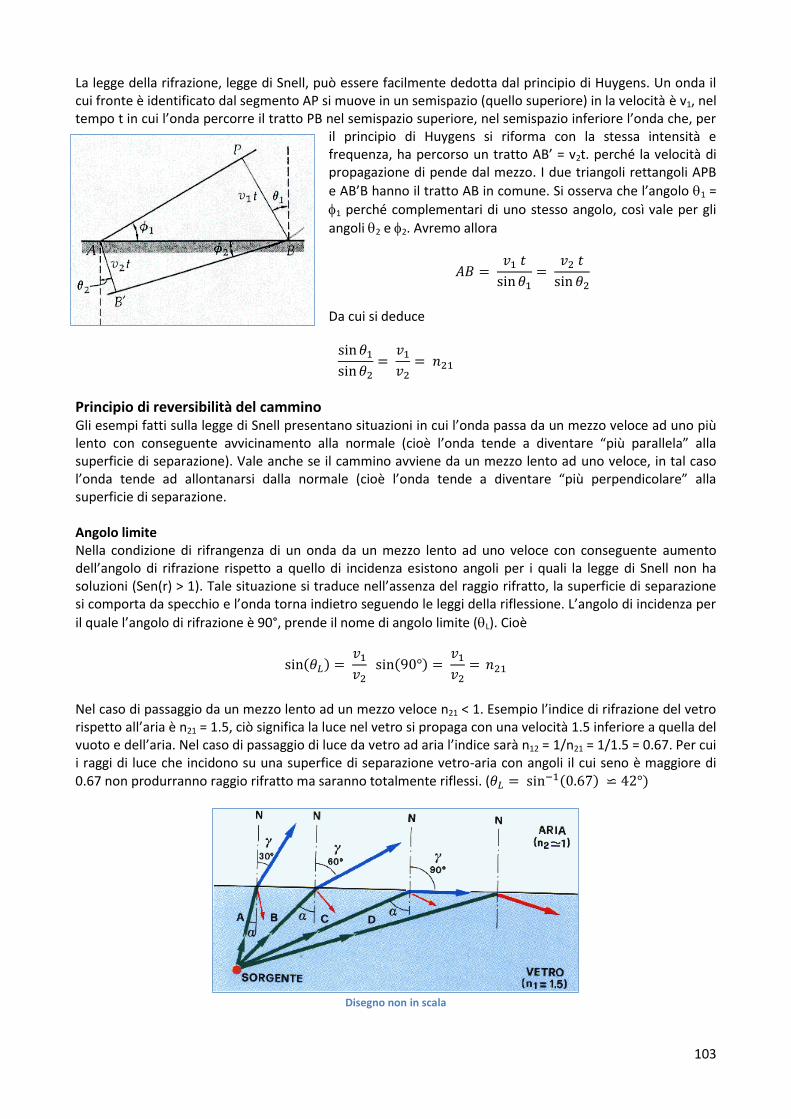
103
La legge della rifrazione, legge di Snell, può essere facilmente dedotta dal principio di Huygens. Un onda il cui fronte è identificato dal segmento AP si muove in un semispazio (quello superiore) in la velocità è v1, nel tempo t in cui l’onda percorre il tratto PB nel semispazio superiore, nel semispazio inferiore l’onda che, per
il principio di Huygens si riforma con la stessa intensità e frequenza, ha percorso un tratto AB’ = v2t. perché la velocità di propagazione di pende dal mezzo. I due triangoli rettangoli APB
e AB’B hanno il tratto AB in comune. Si osserva che l’angolo 1 =
1 perché complementari di uno stesso angolo, così vale per gli
angoli 2 e 2. Avremo allora
𝐴𝐵 = 𝑣1 𝑡
sin 𝜃1=
𝑣2 𝑡
sin 𝜃2
Da cui si deduce
sin 𝜃1
sin 𝜃2=
𝑣1
𝑣2= 𝑛21
Principio di reversibilità del cammino Gli esempi fatti sulla legge di Snell presentano situazioni in cui l’onda passa da un mezzo veloce ad uno più lento con conseguente avvicinamento alla normale (cioè l’onda tende a diventare “più parallela” alla superficie di separazione). Vale anche se il cammino avviene da un mezzo lento ad uno veloce, in tal caso l’onda tende ad allontanarsi dalla normale (cioè l’onda tende a diventare “più perpendicolare” alla superficie di separazione. Angolo limite Nella condizione di rifrangenza di un onda da un mezzo lento ad uno veloce con conseguente aumento dell’angolo di rifrazione rispetto a quello di incidenza esistono angoli per i quali la legge di Snell non ha soluzioni (Sen(r) > 1). Tale situazione si traduce nell’assenza del raggio rifratto, la superficie di separazione si comporta da specchio e l’onda torna indietro seguendo le leggi della riflessione. L’angolo di incidenza per
il quale l’angolo di rifrazione è 90°, prende il nome di angolo limite (L). Cioè
sin(𝜃𝐿) = 𝑣1
𝑣2 sin(90°) =
𝑣1
𝑣2= 𝑛21
Nel caso di passaggio da un mezzo lento ad un mezzo veloce n21 < 1. Esempio l’indice di rifrazione del vetro rispetto all’aria è n21 = 1.5, ciò significa la luce nel vetro si propaga con una velocità 1.5 inferiore a quella del vuoto e dell’aria. Nel caso di passaggio di luce da vetro ad aria l’indice sarà n12 = 1/n21 = 1/1.5 = 0.67. Per cui i raggi di luce che incidono su una superfice di separazione vetro-aria con angoli il cui seno è maggiore di 0.67 non produrranno raggio rifratto ma saranno totalmente riflessi. (𝜃𝐿 = sin−1(0.67) ⋍ 42°)
Disegno non in scala

104
Le onde sonore e i suoni Le sorgenti sonore
Appoggiate una mano su una radio accesa o su uno strumento musicale che sta suonando: avvertirete
chiaramente delle vibrazioni. Proverete la stessa sensazione anche appoggiando le dita sulla gola mentre
parlate. E allora potrete concludere che le sorgenti sonore, cioè i corpi che emettono suoni, vibrano. Noi
possiamo udire come suoni l’effetto di queste vibrazioni perché la superficie della sorgente si accoppia con
l’aria, generandovi onde sonore, cioè onde elastiche longitudinali, che arrivano al nostro orecchio. Qui
appositi sensori le rivelano, trasmettendo al cervello le informazioni come segnali elettrici attraverso il
sistema nervoso. Ed è poi nel cervello che queste informazioni vengono elaborate, producendo ciò che noi
percepiamo appunto come suoni. Non tutte le vibrazioni delle sorgenti, tuttavia, vengono percepite come
suoni, ma soltanto quelle a cui l’orecchio umano è sensibile, cioè quelle la cui frequenza è
approssimativamente compresa fra 20 Hz e 20 kHz. Questa gamma di frequenze, nonostante le variabilità
individuali nella percezione dei suoni, è assunta comunemente come standard per i suoni, portando così a
chiamare ultrasuoni quelli con frequenze maggiori di 20 kHz e infrasuoni quelli con frequenze inferiori a 20
Hz. La sorgente sonora che usiamo normalmente è l’apparato vocale del nostro corpo: un vero e proprio
“strumento a fiato” costituito dalle corde vocali, poste in vibrazione dal flusso d’aria proveniente dai
polmoni, e da un insieme di cavità interne che funziona in modo simile a una cassa di risonanza (La Fisica
attorno a noi 4.) Una sorgente sonora assai comune è l’altoparlante. Parti essenziali di questo dispositivo
sono una bobina, libera di spostarsi fra i poli di un magnete, e una membrana collegata rigidamente alla
bobina. Quando la bobina è percorsa da una corrente elettrica variabile, fra essa e il magnete si esercita
una forza di intensità corrispondente che la pone in vibrazione assieme alla membrana, che a sua volta fa
vibrare l’aria producendo i suoni. Altri esempi di sorgenti sonore sono gli strumenti musicali. Negli
strumenti a corda, come le chitarre o i violini, i suoni sono prodotti dalla vibrazioni di una corda tesa; nei
tamburi, dalle vibrazioni di una membrana tesa. Diverso è il caso degli strumenti a fiato, come i flauti, i
sassofoni e gli organi, nei quali un soffio d’aria mette una vibrazione una colonna d’aria all’interno di una
cavità, dalle cui dimensioni dipende la frequenza del suono che viene emesso.
Il suono
Il suono è generato dalla variazione di pressione in un mezzo materiale (fluido o solido) che si propaga senza trasporto di materia. Esso è caratterizzato da alcune grandezze fondamentali quali l'Ampiezza, la frequenza o il periodo di oscillazione, la lunghezza d'onda e la velocità di propagazione nel mezzo attraversato. Il suono è il principale mezzo di comunicazione dell'uomo e il suo apparato uditivo si è specializzato nel
tempo in modo da ottimizzare l'ascolto del linguaggio parlato. Anche il rumore è un suono ma con
caratteristiche fisico-psichiche non gradite. Il suono è segnale di vita ed ha un profondo impatto sub-
liminare sull’Uomo. L’uso del suono è vario: esso veniva utilizzato dai mongoli per torturare ed uccidere i
prigionieri ponendoli all'interno di una campana metallica e si dice che Alessandro Magno utilizzasse un
grande corno per terrorizzare i suoi nemici.
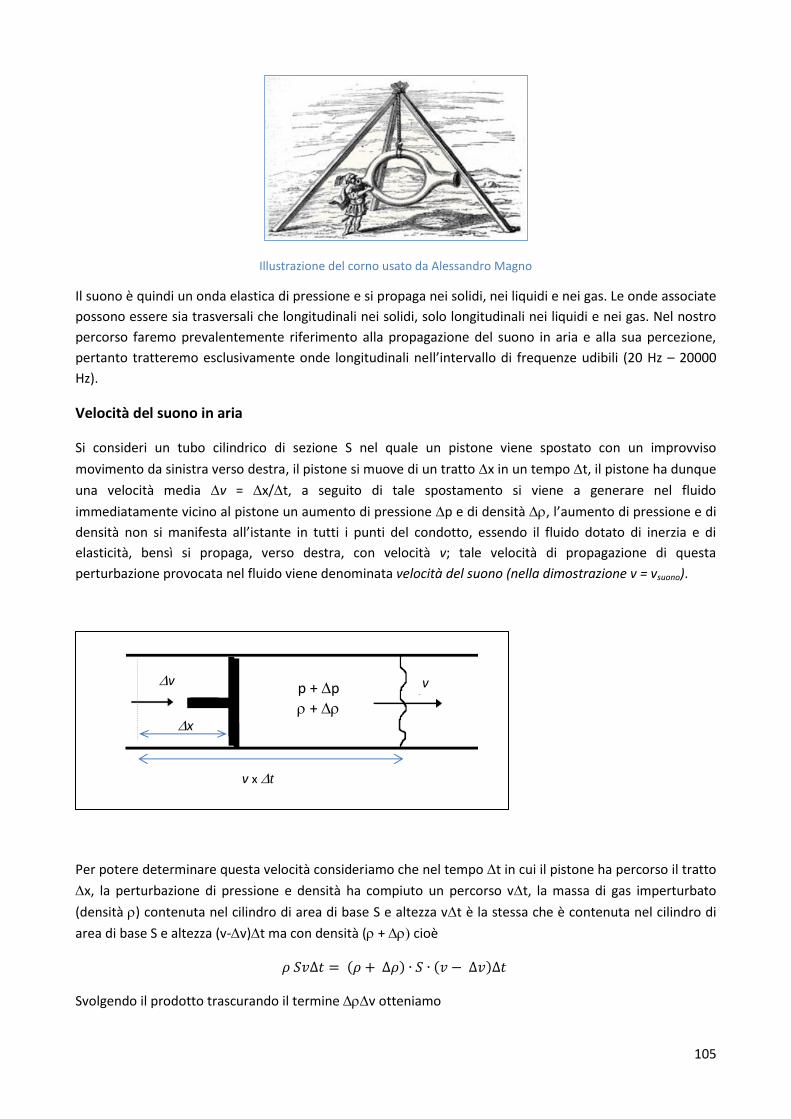
105
Illustrazione del corno usato da Alessandro Magno
Il suono è quindi un onda elastica di pressione e si propaga nei solidi, nei liquidi e nei gas. Le onde associate
possono essere sia trasversali che longitudinali nei solidi, solo longitudinali nei liquidi e nei gas. Nel nostro
percorso faremo prevalentemente riferimento alla propagazione del suono in aria e alla sua percezione,
pertanto tratteremo esclusivamente onde longitudinali nell’intervallo di frequenze udibili (20 Hz – 20000
Hz).
Velocità del suono in aria
Si consideri un tubo cilindrico di sezione S nel quale un pistone viene spostato con un improvviso
movimento da sinistra verso destra, il pistone si muove di un tratto x in un tempo t, il pistone ha dunque
una velocità media v = x/t, a seguito di tale spostamento si viene a generare nel fluido
immediatamente vicino al pistone un aumento di pressione p e di densità , l’aumento di pressione e di
densità non si manifesta all’istante in tutti i punti del condotto, essendo il fluido dotato di inerzia e di
elasticità, bensì si propaga, verso destra, con velocità v; tale velocità di propagazione di questa
perturbazione provocata nel fluido viene denominata velocità del suono (nella dimostrazione v = vsuono).
Per potere determinare questa velocità consideriamo che nel tempo t in cui il pistone ha percorso il tratto
x, la perturbazione di pressione e densità ha compiuto un percorso vt, la massa di gas imperturbato
(densità ) contenuta nel cilindro di area di base S e altezza vt è la stessa che è contenuta nel cilindro di
area di base S e altezza (v-v)t ma con densità ( + cioè
𝜌 𝑆𝑣∆𝑡 = (𝜌 + ∆𝜌) ∙ 𝑆 ∙ (𝑣 − ∆𝑣)∆𝑡
Svolgendo il prodotto trascurando il termine v otteniamo
v v
x
v x t
p + p
+

106
∆𝜌
𝜌=
∆𝑣
𝑣 (1)
La perturbazione si propaga perché c’è uno squilibrio nella pressione, quindi vale il teorema dell’impulso,
cioè (facendo attenzione a non confondere i significati)
𝐹 ∆𝑡 = 𝑚 ∆𝑣
Nel nostro caso la forza è data dal prodotto della variazione di pressione per la superficie e la massa dal
prodotto della densità per il volume (cilindro di gas imperturbato di altezza vt, quindi il volume
𝑉 = 𝑆 ∙ 𝑣 ∙ ∆𝑡), la variazione di velocità è quella del pistone (∆𝑣) perché è il pistone che determina lo
spostamento della massa di gas, abbiamo quindi
𝐹 = ∆𝑝 ∙ 𝑆
𝑚 = 𝜌 ∙ 𝑆 ∙ 𝑣 ∙ ∆𝑡
∆𝑝 ∙ 𝑆 ∙ ∆𝑡 = 𝜌 ∙ 𝑆 ∙ 𝑣 ∙ ∆𝑡 ∙ ∆𝑣
Semplificando la sezione S e il tempo t otteniamo
∆𝑝 = 𝜌 ∙ 𝑣 ∙ ∆𝑣 (2)
Confrontando la (1) e la (2) otteniamo
∆p
∆𝜌= 𝑣2
Nel caso del suono le compressioni e rarefazioni dell’aria sono molto rapide (centinaia di volte al secondo)
pertanto la compressione del gas è una trasformazione adiabatica che è descritta dalla relazione
𝑝 ∙ 𝑉𝛾 = 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒
Come nel caso della conservazione della massa avremo variando sia la pressione p che il volume elevato
alla gamma V, il loro prodotto si mantiene costante, cioè
(𝑝 + ∆𝑝) ∙ (𝑉𝛾 + 𝛾𝑉𝛾−1∆𝑉) = 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒
Svolgendo il prodotto e trascurando il termine pV, otteniamo
∆𝑝
𝑝= −𝛾
∆𝑉
𝑉 (3)
Riprendiamo ora la definizione di densità
𝜌 = 𝑚
𝑉, 𝑉 =
𝑚
𝜌
di conseguenza, se la massa resta costante, una variazione di densità e collegata alla variazione di volume
nel seguente modo

107
∆𝑉 = − 𝑚
𝜌2 ∆𝜌
che sostituita nella (3) produce
∆𝑝 = 𝛾𝑝
𝑉∙
𝑚
𝜌2 ∆𝜌
Ricordando che 𝜌 = 𝑚/𝑉 , otteniamo
∆𝑝 = 𝛾 𝑝
𝜌 ∆𝜌 (4)
Riprendiamo ora l’equazione di stato dell’aria considerata come un gas perfetto per cui vale la relazione
𝑝 𝑉 = 𝑛 𝑅 𝑇
parlando di aria libera in atmosfera, poiché ha poco senso parlare di volume del gas, spesso si usa la
seguente equazione (ottenuta dall’equazione di stato dividendo entrambi i termini per il volume e
sostituendo al numero di moli n il rapporto tra la massa del gas e il peso molecolare medio)
𝑝 = 𝜌 𝑅𝑎𝑇
dove è la densità e Ra è la costante dei gas diviso il peso molecolare medio dell’aria (Ra = 8.315 / 28.9 x
1000 = 287 (J/Kg*K). Usando l’equazione di stato dell’aria e semplifichiamo il rapporto pressione su densità
nella (4) e otteniamo
∆𝑝 = 𝛾 𝑅𝑎 𝑇 ∆𝜌 (5)
confrontando con la (2) abbiamo
𝜌 ∙ 𝑣 ∙ ∆𝑣 = 𝛾 𝑅𝑎 𝑇 ∆𝜌
che, a sua volta confrontata con la (1),
∆𝑣 = 𝑣
𝜌 ∆𝜌
dividendo membro a membro, si ottiene
𝜌 ∙ 𝑣 ∙= 𝛾 𝑅𝑎 𝑇 𝜌
𝑣
da cui discende
𝑣 = √𝛾 𝑅𝑎 𝑇
Una diversa espressione si ottiene sempre utilizzando l’equazione di stato, otteniamo
𝑣 = √𝛾 𝑝
𝜌
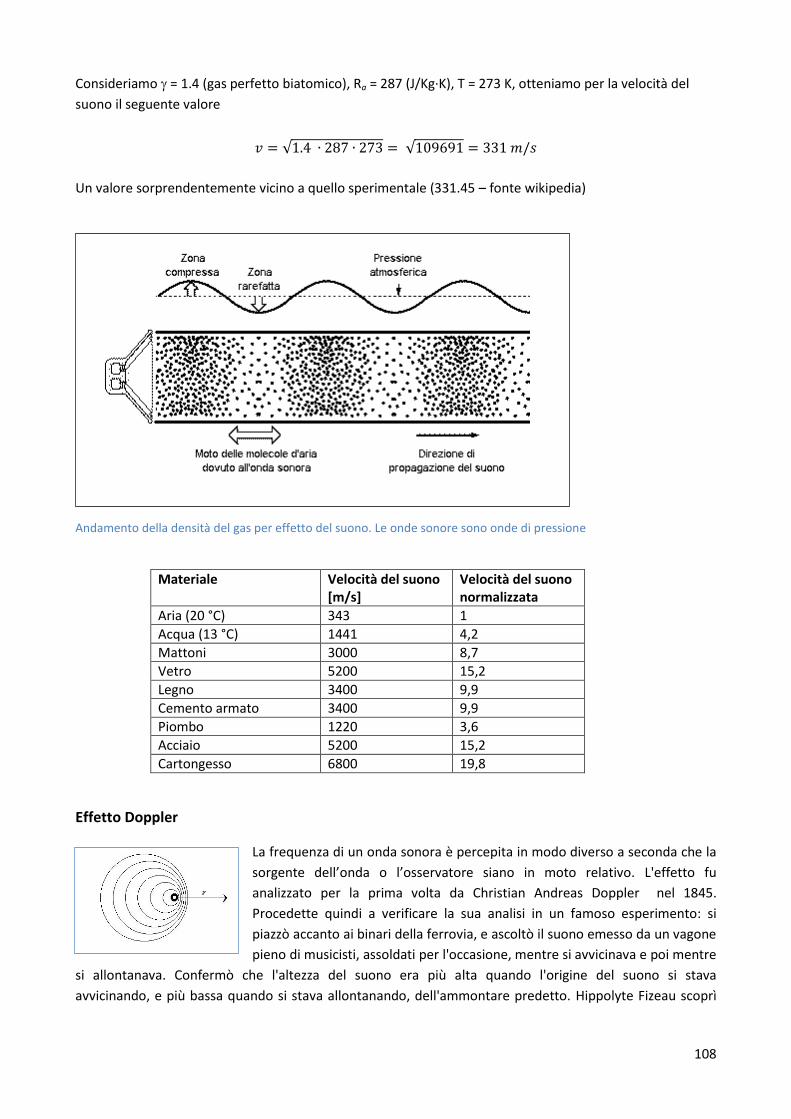
108
Consideriamo = 1.4 (gas perfetto biatomico), Ra = 287 (J/Kg·K), T = 273 K, otteniamo per la velocità del
suono il seguente valore
𝑣 = √1.4 ∙ 287 ∙ 273 = √109691 = 331 𝑚/𝑠
Un valore sorprendentemente vicino a quello sperimentale (331.45 – fonte wikipedia)
Andamento della densità del gas per effetto del suono. Le onde sonore sono onde di pressione
Materiale Velocità del suono [m/s]
Velocità del suono normalizzata
Aria (20 °C) 343 1
Acqua (13 °C) 1441 4,2
Mattoni 3000 8,7
Vetro 5200 15,2
Legno 3400 9,9
Cemento armato 3400 9,9
Piombo 1220 3,6
Acciaio 5200 15,2
Cartongesso 6800 19,8
Effetto Doppler
La frequenza di un onda sonora è percepita in modo diverso a seconda che la
sorgente dell’onda o l’osservatore siano in moto relativo. L'effetto fu
analizzato per la prima volta da Christian Andreas Doppler nel 1845.
Procedette quindi a verificare la sua analisi in un famoso esperimento: si
piazzò accanto ai binari della ferrovia, e ascoltò il suono emesso da un vagone
pieno di musicisti, assoldati per l'occasione, mentre si avvicinava e poi mentre
si allontanava. Confermò che l'altezza del suono era più alta quando l'origine del suono si stava
avvicinando, e più bassa quando si stava allontanando, dell'ammontare predetto. Hippolyte Fizeau scoprì

109
indipendentemente lo stesso effetto nelle onde elettromagnetiche nel 1848 (in Francia, l'effetto è a volte
chiamato "effetto Doppler-Fizeau").
Consideriamo una sorgente sonora di frequenza f (es f = 200 Hz, quindi T = 1/f = 0.005 s), poiché il suono si
muove in aria a velocità costante vs = 340 m/s, la lunghezza d’onda sarà = vs x T = 340 x 0.005 = 1,7 m. La
sorgente emette due “creste” successiva (alta pressione) a distanza di 0.005 secondi, ogni cresta si muove
alla velocità di 340 m/s e, nel tempo che intercorre tra una cresta e la successiva, percorre 1.7 metri. Cosa
succede se la sorgente sonora si muove di velocità costante vsor = 20 m/s? Alla velocità delle onde non
succede nulla perché come abbiamo visto nel paragrafo precedente essa dipende dai parametri meccanici
del mezzo, cambia però la distanza tra due “creste” successive perché nel tempo T che intercorre tra
l’emissione di due creste la sorgente ha percorso un tratto s = vsor x T = 20 x 0.005 = 0. 1 m, per cui la
lunghezza d’onda 1 che un osservatore fermo rispetto misura sarà
𝜆1 = 𝜆 − 𝑣𝑠𝑜𝑟 ∙ 𝑇 = 1.7 − 0.1 = 1.6 𝑚
Come detto prima la velocità di propagazione dell’onda rimane invariata per cui la frequenza f1 misurata
sarà
𝑓1 = 𝑣𝑠
𝜆1=
𝑣𝑠
𝜆 − 𝑣𝑠𝑜𝑟 ∙ 𝑇=
𝑣𝑠
𝜆 ∙
1
1 − 𝑣𝑠𝑜𝑟 ∙ 𝑇
𝜆
= 𝑓 ∙1
1 − 𝑣𝑠𝑜𝑟𝑣𝑠
Nel nostro esempio abbiamo
𝑓1 = 𝑓 ∙1
1 − 𝑣𝑠𝑜𝑟𝑣𝑠
= 200 ∙1
1 − 20
340
= 200 ∙1
320340⁄
= 212,5 𝐻𝑧
La frequenza “percepita” è maggiore se la sorgente è in avvicinamento all’osservatore (se la sorgente
insegue il suono nella direzione dell’osservatore), minore in caso contrario. Questo fatto è ben noto, il
suono della sirena di un autoambulanza in avvicinamento è percepito più acuto (frequenza maggiore),
mentre è percepito più “grave” (frequenza minore) se l’autoambulanza è in allontanamento (velocità della
sorgente di segno diverso da quello della velocità del suono).
La situazione si presente in modo leggermente diverso nel caso in cui la sorgente sonora è in quiete rispetto
all’aria ed è l’osservatore a muoversi di velocità voss (es. verso la sorgente). Consideriamo i dati dell’esempio
precedente. Sorgente di frequenza f = 200 Hz, osservatore che si avvicina alla sorgente con velocità voss = 20
m/s. Se l’osservatore fosse in quiete osserverebbe due “creste” consecutive ad un intervallo di tempo T =
1/f = 0.005 s. Immaginiamo l’osservatore che si trova nella posizione di una cresta, muovendosi verso la
sorgente, l’osservatore incontrerà la cresta successiva dopo un tempo T1 diverso da periodo T dell’onda,
determinato dalla lunghezza d’onda (che è la distanza tra l’osservatore e la cresta successiva) e dalla
velocità di avvicinamento (velocità relativa) tra la cresta successiva e l’osservatore, avremo cioè
𝑇1 = 𝜆
𝑣𝑠 + 𝑣𝑜𝑠𝑠
Per cui la frequenza f1 percepita sarà
𝑓1 = 1
𝑇1=
𝑣𝑠 + 𝑣𝑜𝑠𝑠
𝜆=
𝑣𝑠 + 𝑣𝑜𝑠𝑠
𝑣𝑠𝑓⁄
= 𝑓 ∙ (1 +𝑣𝑜𝑠𝑠
𝑣𝑠)
Con i dati del nostro esempio abbiamo

110
𝑓1 = 𝑓 ∙ (1 +𝑣𝑜𝑠𝑠
𝑣𝑠) = 200 (1 +
20
340) = 200 (1 + 0.059) = 211,8 𝐻𝑧
Nel caso generale, quando a muoversi sono contemporaneamente sorgente e osservatore avremo (senza
dimostrazione)
𝑓1 = 𝑓 ∙1 ±
𝑣𝑜𝑠𝑠𝑣𝑠
1 ±𝑣𝑠𝑜𝑟𝑣𝑠
Il segno +/- è necessario per sorgente e osservatore in avvicinamento e allontanamento.
Le applicazioni dell’effetto Doppler sono moltissime, spesso fanno riferimento alla possibilità di misurare la
variazione della frequenza di un‘onda. Facendo riferimento alle formule nel caso della sorgente in
movimento avremo
∆𝑓 = 𝑓1 − 𝑓 = 𝑓 ∙1
1 − 𝑣𝑠𝑜𝑟𝑣𝑠
− 𝑓 = 𝑓 ∙ (1
1 − 𝑣𝑠𝑜𝑟𝑣𝑠
− 1) = 𝑓 ∙ (𝑣𝑠𝑜𝑟
𝑣𝑠 − 𝑣𝑠𝑜𝑟 )
Mentre nel caso dell’osservatore in movimento abbiamo
∆𝑓 = 𝑓1 − 𝑓 = 𝑓 ∙ (1 +𝑣𝑜𝑠𝑠
𝑣𝑠) − 𝑓 = 𝑓 ∙ (1 +
𝑣𝑜𝑠𝑠
𝑣𝑠− 1) = 𝑓 ∙ (
𝑣𝑜𝑠𝑠
𝑣𝑠 )
In entrambi i casi la variazione di frequenza è proporzionale alla frequenza (fondamentale) dell’onda. La
misura della differenza di frequenza permette di risalire alla velocità. I ragionamenti sin qui fatti per sono
validi per tutti i tipi di onde, anche per la luce e le onde radio.
L’effetto Doppler si manifesta anche quando l’osservatore non si trova sulla linea di moto delle sorgente e
vice versa. In tal caso solo la proiezione della velocità nella direzione sorgente-osservatore contribuisce
all’effetto doppler, pertanto chiamato l’angolo formato dal vettore velocità e dalla congiungente, le
relazioni diventano
Sorgente in movimento 𝑓1 = 𝑓 ∙1
1− 𝑣𝑠𝑜𝑟 ∙cos 𝜑
𝑣𝑠
Osservatore in movimento 𝑓1 = 𝑓 ∙ (1 +𝑣𝑜𝑠𝑠∙cos 𝜑
𝑣𝑠)
Alcuni dispositivi sfruttano l’effetto doppler per misurare la velocità di un oggetto (ecografia doppler che
misura la velocità del sangue, sonar doppler che misura la velocità di oggetti sommersi in movimento). Ciò
che viene misurato è sia il ritardo tra l’impulso sonoro e il suo eco, sia le frequenze dell’onda inviata e di
quella riflessa dall’oggetto in movimento. Con il ritardo temporale si determina la distanza dell’oggetto che
ha causato la riflessione, con lo spostamento della frequenza la velocità.
Supponiamo che un sonda emetta un impulso di ultrasuoni di frequenza f0 = 100 kHz e sia in grado di
misurarne l’eco sia come tempo di ritardo sia come frequenza ( = vs/f0 = 340 /100000 = 0,0034 m = 3.4
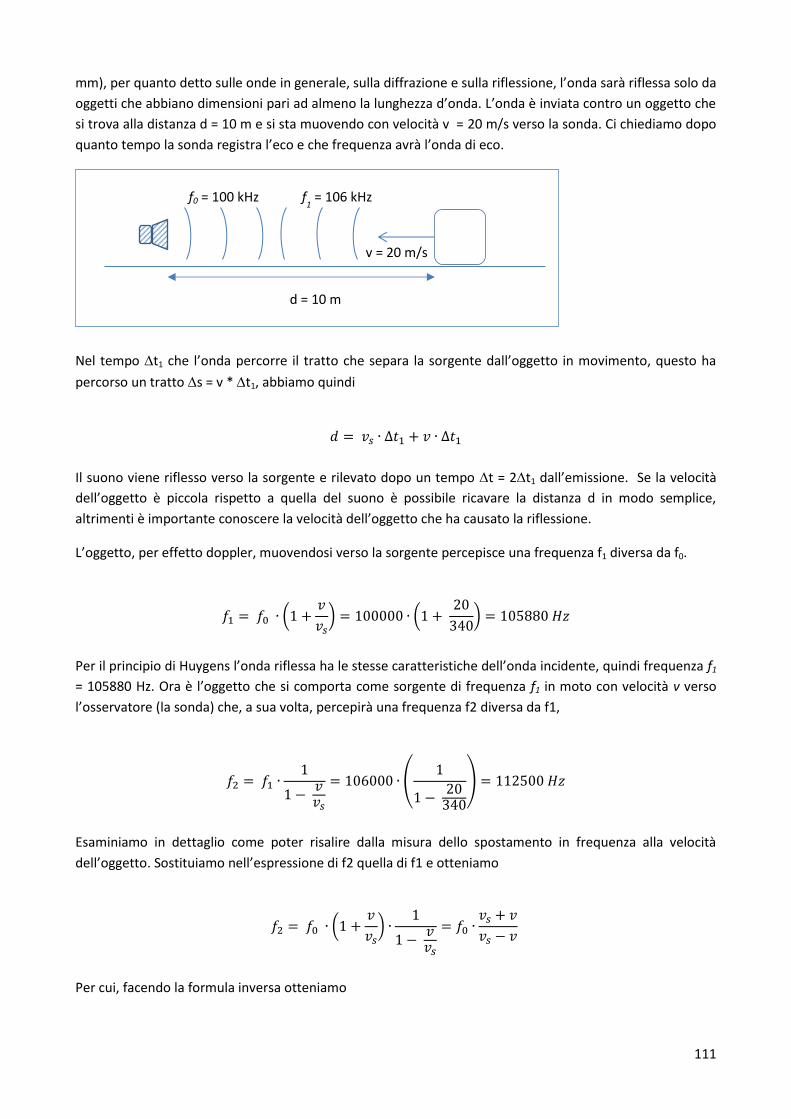
111
mm), per quanto detto sulle onde in generale, sulla diffrazione e sulla riflessione, l’onda sarà riflessa solo da
oggetti che abbiano dimensioni pari ad almeno la lunghezza d’onda. L’onda è inviata contro un oggetto che
si trova alla distanza d = 10 m e si sta muovendo con velocità v = 20 m/s verso la sonda. Ci chiediamo dopo
quanto tempo la sonda registra l’eco e che frequenza avrà l’onda di eco.
Nel tempo t1 che l’onda percorre il tratto che separa la sorgente dall’oggetto in movimento, questo ha
percorso un tratto s = v * t1, abbiamo quindi
𝑑 = 𝑣𝑠 ∙ ∆𝑡1 + 𝑣 ∙ ∆𝑡1
Il suono viene riflesso verso la sorgente e rilevato dopo un tempo t = 2t1 dall’emissione. Se la velocità
dell’oggetto è piccola rispetto a quella del suono è possibile ricavare la distanza d in modo semplice,
altrimenti è importante conoscere la velocità dell’oggetto che ha causato la riflessione.
L’oggetto, per effetto doppler, muovendosi verso la sorgente percepisce una frequenza f1 diversa da f0.
𝑓1 = 𝑓0 ∙ (1 +𝑣
𝑣𝑠) = 100000 ∙ (1 +
20
340) = 105880 𝐻𝑧
Per il principio di Huygens l’onda riflessa ha le stesse caratteristiche dell’onda incidente, quindi frequenza f1
= 105880 Hz. Ora è l’oggetto che si comporta come sorgente di frequenza f1 in moto con velocità v verso
l’osservatore (la sonda) che, a sua volta, percepirà una frequenza f2 diversa da f1,
𝑓2 = 𝑓1 ∙1
1 − 𝑣𝑣𝑠
= 106000 ∙ (1
1 − 20
340
) = 112500 𝐻𝑧
Esaminiamo in dettaglio come poter risalire dalla misura dello spostamento in frequenza alla velocità
dell’oggetto. Sostituiamo nell’espressione di f2 quella di f1 e otteniamo
𝑓2 = 𝑓0 ∙ (1 +𝑣
𝑣𝑠) ∙
1
1 − 𝑣𝑣𝑠
= 𝑓0 ∙𝑣𝑠 + 𝑣
𝑣𝑠 − 𝑣
Per cui, facendo la formula inversa otteniamo
d = 10 m
v = 20 m/s
f0 = 100 kHz
f1 = 106 kHz

112
𝑣 = 𝑣𝑠 ∙ 𝑓2 − 𝑓0
𝑓2 + 𝑓0= 𝑣𝑠 ∙
∆𝑓
2𝑓0 + ∆𝑓
Nel nostro esempio, supponendo che il nostro sistema abbiam misurato f0 = 100 kHz e f = 12 kHz,
abbiamo,
𝑣 = 𝑣𝑠 ∙ ∆𝑓
2𝑓0 + ∆𝑓= 340 ∙
12
2 ∙ 100 + 12= 340 ∙
12
212= 20.3 𝑚/𝑠
Risultato coerente con quanto ipotizzato.
Su questo principio e ragionamento si basa il funzionamento delle ecografo doppler che permette di
rilevare la velocità del sangue e del radar doppler che, in meteorologia, permette di misurare la velocità
degli ammassi nuvolosi.
Una sorgente può muoversi in un fluido con velocità anche maggiori di quella del suono, si definisce il
numero di Mach come il rapporto tra le velocità della sorgente (oggetto) in fluido e del suono nel fluido
stesso. Il numero di Mach è adimensionale.
𝑀 = 𝑣
𝑣𝑠
Si definiscono alcuni regimi schematizzati nella figura seguente
Un aereo in volo a velocità transonica. La nuvola conica, dovuta alla condensazione dell'umidità presente nell'aria, compare a causa della brusca diminuzione di temperatura e pressione dietro l’aeromobile che superato la velocità del suono
Percezione del suono:
La pressione sonora
Come accennato in precedenza, essendo la biologia umana fortemente evoluta in relazione alla
percezione del suono, la misura dell’intensità risulta legata alla dinamica dell’orecchio umano.

113
In generale la fluttuazione locale di pressione p (quella che abbiamo detto generare il suono) è
irregolare e non armonica, quindi non è possibile definire in modo univoco l’ampiezza, pertanto si
definisce il livello di pressione medio come il valore ottenuto su un intervallo di tempo T (molto
grande) del quadrato della fluttuazione di pressione
∆𝑝𝑚2 =
1
𝑇∫ ∆𝑝2(𝑡)𝑑𝑡
𝑇
0
L’espressione matematica sopra definita è chiamate “integrale” e rappresenta l’area compresa tra
l’asse orizzontale e il valore della funzione ∆𝑝2(𝑡), il valore medio rappresenta l’altezza del
rettangolo che ha base T e la stessa area della figura. Facendo riferimento al suono parleremo
genericamente di pressione p intendendo la fluttuazione p rispetto al valore medio. L’orecchio
umano è in grado fluttuazioni di pressione che abbiano come valore minimo p0 = 20 Pa (2x10-5
Pa). Utilizzando questo limite convenzionale come riferimenti si definisce Il livello di pressione
sonora (SPL) o livello sonoro 𝐿𝑝 la misura logaritmica della pressione sonora media di un'onda
sonora rispetto ad una sorgente di riferimento. Viene misurata in decibel:
𝐿𝑝 = 10 ∙ log10 (𝑝
𝑝0)
2
= 20 ∙ log10 (𝑝
𝑝0) 𝑑𝐵
Può essere utile esprimere la pressione del suono in termini di decibel sonori quando si ha a che
fare con problemi legati all'udito, dal momento che l'intensità percepita dall'orecchio è circa
proporzionale al logaritmo del quadrato della pressione sonora.
In caso di più sorgenti la determinazione del livello di pressione sarà fatta “sommando
quadraticamente “ la pressione determinata dalle singole sorgenti
Intensità del suono e potenza sonora
Si definisce intensità del suono l’energia uscente da un volume unitario, nell’unità di tempo,
attraverso la superficie unitaria, nel caso di un onda tridimensionale si può dimostrare che
l’intensità ha la seguente espressione (𝐼 = 𝑒𝑛𝑒𝑟𝑔𝑖𝑎 /(𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒 ∙ 𝑡𝑒𝑚𝑝𝑜))
𝐼 = 𝑝 ∙ 𝑢
Dove u è la velocità media delle molecole e p la pressione, l’unità di misura dell’intensità è W/m2,
si può anche dimostrare che l’intensità del suono è legata alla pressione dalla seguente relazione
𝐼 = ∆𝑝𝑚𝑒𝑑𝑖𝑜
2
𝜌0 ∙ 𝑣𝑠
Dove 0 è la densità dell’aria e vs la velocità del suono. Considerando i valori per l’aria standard
otteniamo 𝜌0 ∙ 𝑣𝑠 = 400 𝑘𝑔/𝑚2 ∙ 𝑠. Anche l’intensità sonora viene espressa in dB, il valore di
riferimento, come facilmente deducibile, sarà

114
𝐼0 = ∆𝑝0
2
𝜌0 ∙ 𝑣𝑠=
(20 𝜇𝑃𝑎)2
400= 10−12 [𝑊
𝑚2⁄ ]
Si definisce pertanto il livello di intensità sonora nel seguente modo
𝐿𝐼 = 10 log10
𝐼
𝐼0 𝑑𝐵
Ci possiamo chiedere in che relazione sono la scala delle pressioni e la scala delle intensità, si
dimostra che
𝐿𝑝 = 𝐿𝐼 + 0.14
Il fattore correttivo 0.14 risulta dai dati per l’aria in condizioni standard (T = 20 °C, 𝜌0 ∙ 𝑣𝑠 =
400 𝑘𝑔/𝑚2 ∙ 𝑠)
Consideriamo una certa quantità di aria a densità costante 0 contenuta in volume V0 avente
velocità u, la sua energia cinetica Ec sarà (trascurando la parte di variazione di densità e volume)
𝐸𝑐 =1
2 𝜌0 ∙ 𝑉0 ∙ 𝑢2
La sua energia potenziale potenziale Ep è legata al lavoro che l’aria intorno compie con la forza di
pressione, per cui potremmo scrivere
Δ𝐸𝑝 ≈ 𝑝 ∙ ΔV
La conservazione della massa ci dice che
(𝜌0 + Δ𝜌) ∙ (𝑉0 + Δ𝑉) = 𝜌0 ∙ 𝑉0
Se svolgiamo il calcolo e trascuriamo il temine Δ𝜌 ∙ Δ𝑉, abbiamo
Δ𝑉 = − 𝑉0
𝜌0∙ Δ𝜌
Ricordando la relazione che
Δ𝑝
Δ𝜌= 𝑣𝑠
2
Possiamo riscrivere l’energia potenziale nel seguente modo
Δ𝐸𝑝 ≈ 𝑝 ∙ 𝑉0
𝜌0∙
Δ𝑝
𝑣𝑠2
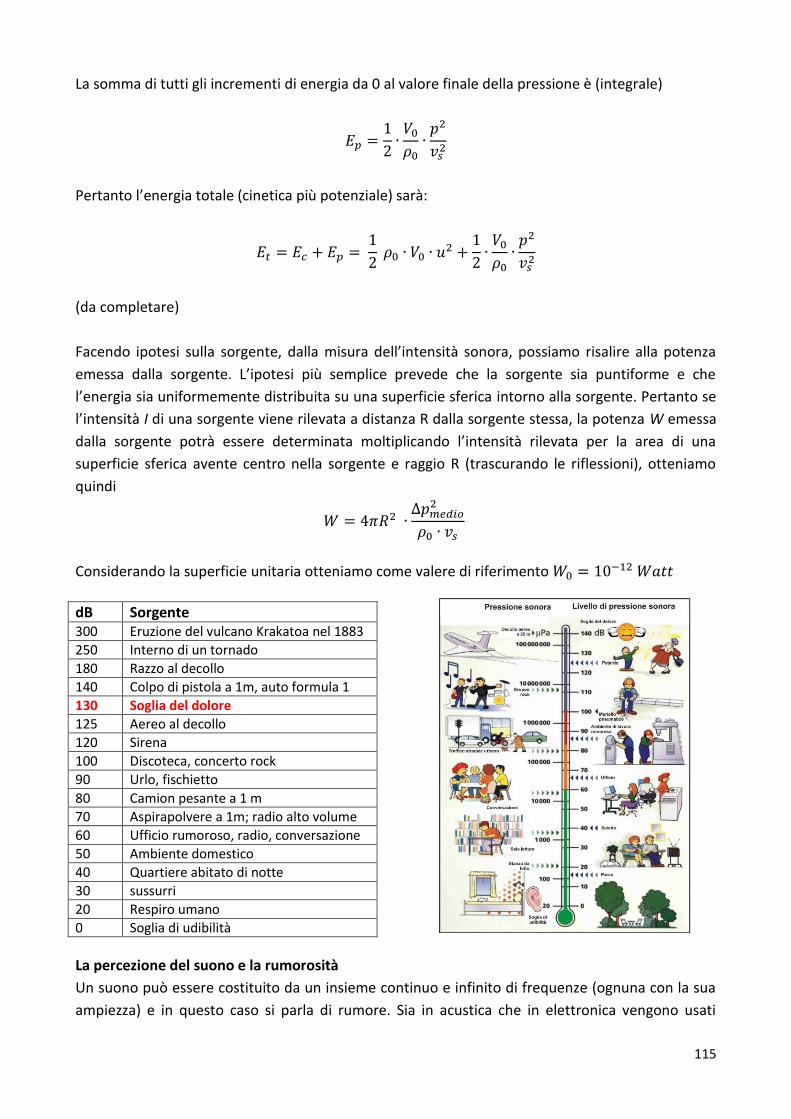
115
La somma di tutti gli incrementi di energia da 0 al valore finale della pressione è (integrale)
𝐸𝑝 =1
2∙
𝑉0
𝜌0∙
𝑝2
𝑣𝑠2
Pertanto l’energia totale (cinetica più potenziale) sarà:
𝐸𝑡 = 𝐸𝑐 + 𝐸𝑝 = 1
2 𝜌0 ∙ 𝑉0 ∙ 𝑢2 +
1
2∙
𝑉0
𝜌0∙
𝑝2
𝑣𝑠2
(da completare)
Facendo ipotesi sulla sorgente, dalla misura dell’intensità sonora, possiamo risalire alla potenza
emessa dalla sorgente. L’ipotesi più semplice prevede che la sorgente sia puntiforme e che
l’energia sia uniformemente distribuita su una superficie sferica intorno alla sorgente. Pertanto se
l’intensità I di una sorgente viene rilevata a distanza R dalla sorgente stessa, la potenza W emessa
dalla sorgente potrà essere determinata moltiplicando l’intensità rilevata per la area di una
superficie sferica avente centro nella sorgente e raggio R (trascurando le riflessioni), otteniamo
quindi
𝑊 = 4𝜋𝑅2 ∙∆𝑝𝑚𝑒𝑑𝑖𝑜
2
𝜌0 ∙ 𝑣𝑠
Considerando la superficie unitaria otteniamo come valere di riferimento 𝑊0 = 10−12 𝑊𝑎𝑡𝑡
dB Sorgente 300 Eruzione del vulcano Krakatoa nel 1883
250 Interno di un tornado
180 Razzo al decollo
140 Colpo di pistola a 1m, auto formula 1
130 Soglia del dolore
125 Aereo al decollo
120 Sirena
100 Discoteca, concerto rock
90 Urlo, fischietto
80 Camion pesante a 1 m
70 Aspirapolvere a 1m; radio alto volume
60 Ufficio rumoroso, radio, conversazione
50 Ambiente domestico
40 Quartiere abitato di notte
30 sussurri
20 Respiro umano
0 Soglia di udibilità
La percezione del suono e la rumorosità
Un suono può essere costituito da un insieme continuo e infinito di frequenze (ognuna con la sua
ampiezza) e in questo caso si parla di rumore. Sia in acustica che in elettronica vengono usati
116
alcuni tipi di rumore per testare strumentazione ed ambienti. Tra i tipi di rumore maggiormente
usati ci sono il rumore bianco e il rumore rosa
Il rumore bianco è costituito dalla sovrapposizione di tutte le frequenze, ognuna con eguale
ampiezza (come in ottica la luce bianca e la sovrapposizione di tutti i colori con uguale intensità), il
rumore bianco serve per verificare la risposta di uno strumento o di un ambiente al variare della
frequenza (è un rumore spesso generato dalla strumentazione stessa e quindi ineliminabile).
Il rumore rosa è un rumore in cui le componenti a bassa frequenza hanno un livello sonoro
maggiore. Tra i tipi di rumore producibili in laboratorio è quello che somiglia maggiormente ai
rumori naturali.
Rumore bianco
Rumore rosa
L'orecchio umano NON HA una sensibilità lineare del rumore, sia per quanto riguarda l'intensità
sia per la frequenza dello stesso, per questo sono state create le curve isofoniche, che descrivono
l'andamento della sensibilità umana per i suoni di diversa intensità e frequenza, l'unità di misura di
queste curve sono i phon, che riportano la scala decibel secondo la scala di sensibilità dell'orecchio
umano.
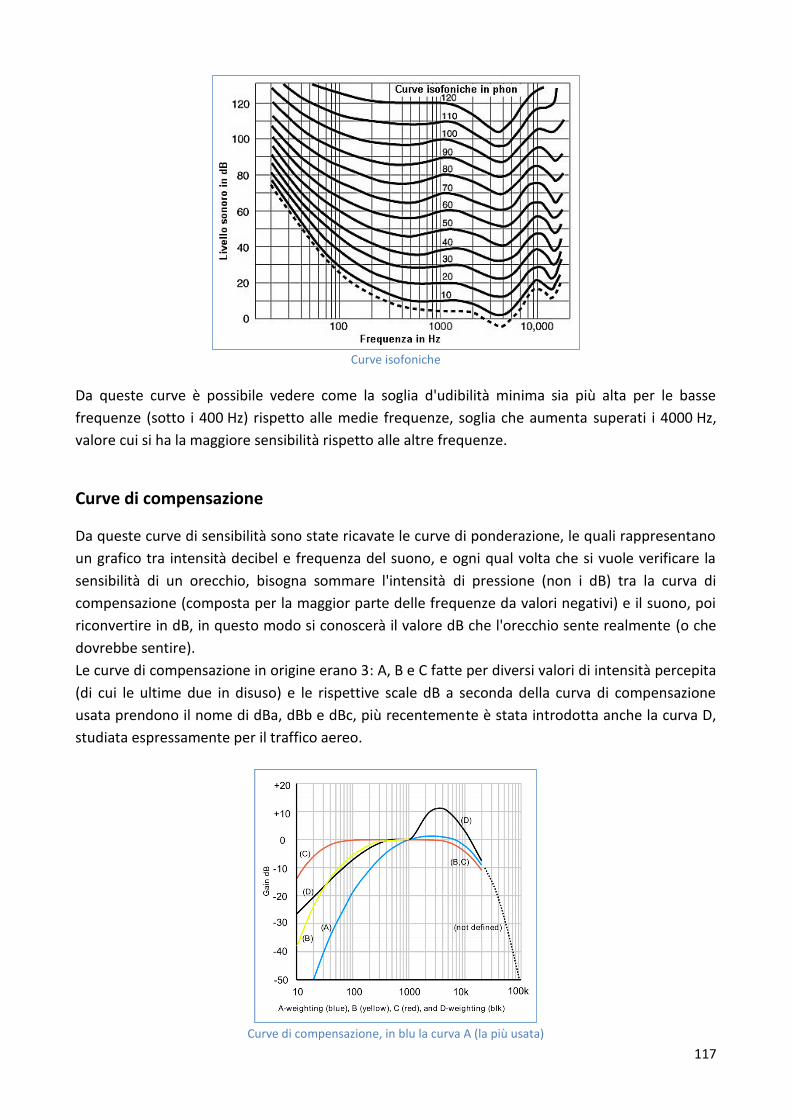
117
Curve isofoniche
Da queste curve è possibile vedere come la soglia d'udibilità minima sia più alta per le basse
frequenze (sotto i 400 Hz) rispetto alle medie frequenze, soglia che aumenta superati i 4000 Hz,
valore cui si ha la maggiore sensibilità rispetto alle altre frequenze.
Curve di compensazione
Da queste curve di sensibilità sono state ricavate le curve di ponderazione, le quali rappresentano
un grafico tra intensità decibel e frequenza del suono, e ogni qual volta che si vuole verificare la
sensibilità di un orecchio, bisogna sommare l'intensità di pressione (non i dB) tra la curva di
compensazione (composta per la maggior parte delle frequenze da valori negativi) e il suono, poi
riconvertire in dB, in questo modo si conoscerà il valore dB che l'orecchio sente realmente (o che
dovrebbe sentire).
Le curve di compensazione in origine erano 3: A, B e C fatte per diversi valori di intensità percepita
(di cui le ultime due in disuso) e le rispettive scale dB a seconda della curva di compensazione
usata prendono il nome di dBa, dBb e dBc, più recentemente è stata introdotta anche la curva D,
studiata espressamente per il traffico aereo.
Curve di compensazione, in blu la curva A (la più usata)

118
Combinazione di livelli Il livello equivalente Al fine di valutare il suono come possibile fonte di inquinamento poiché provoca disturbo è
necessario definire una nuova grandezza. Se la sorgente sonora non emette in modo continuo ma
la sua intensità varia nel tempo di definisce il livello sonoro equivalente come la media temporale
dell’intensità sonora corretta per la curva dBA. I limiti di rumore fissati dalle normative fanno
riferimento a questa grandezza.
Immaginiamo che il livello sonoro in un punto di campo acustico non sia costante ma vari nel
tempo, è il caso più frequente quando il suono è generato da un rumore. Si introduce il Livello
Sonore Equivalente Leq che nell’intervallo di tempo t rappresenta il livello sonoro continuo
avente lo stesso contenuto energetico del segnale variabile nel tempo. Poiché l’energia di un’onda
è proporzionale al quadrato della sua ampiezza il contenuto energetico è legato al livello sonoro.
Immaginando di poter suddividere l’intervallo di tempo in tanti piccoli intervalli ti nei quali il
livello sonoro può essere considerato costante Li avremo
𝐿𝑒𝑞Δ𝑡 = 10 ∙ log10(Δ𝑡1
Δ𝑡∙ 10
𝐿110 +
Δ𝑡1
Δ𝑡∙ 10
𝐿110 + ⋯ … +
Δ𝑡1
Δ𝑡∙ 10
𝐿110)
Misure di rumore
Effetti del rumore sulla salute Sorgenti di rumore Attenuazione del rumore