arcticopter project and diy drones - markharrison.net · arcticopter project and diy drones mark...
TRANSCRIPT

Arcticopter Projectand
DIY Drones
Mark [email protected]
Here’s a presentation on my Arcticopter drone project. It was at a technical conference with a lot of Arduino hackers in the audience. There was a lot of interest in other Arduino-based flight systems so I added the KK and MultiWii boards.
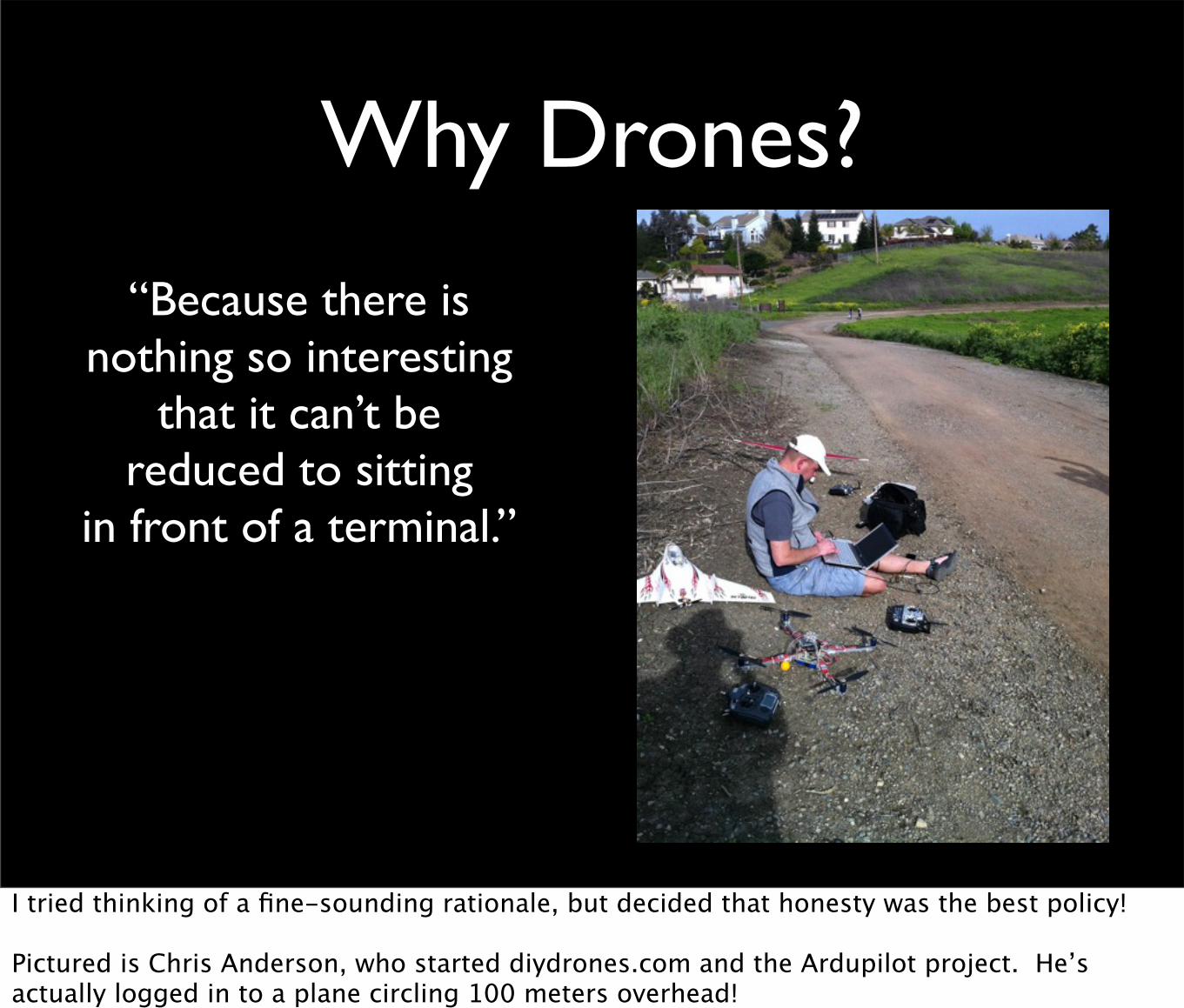
Why Drones?
“Because there isnothing so interesting
that it can’t bereduced to sitting
in front of a terminal.”
I tried thinking of a fine-sounding rationale, but decided that honesty was the best policy!
Pictured is Chris Anderson, who started diydrones.com and the Ardupilot project. He’s actually logged in to a plane circling 100 meters overhead!

• FPV = First Person Video
• AP = Aerial Photography
• Multicopter, Multirotor: quad, hex, octo, tri, sexy
• UAV = Unmanned {Aerial, Autonomous} Vehicle
• Drone = autonomous
• APM = Ardupilot Mega
• MAVLink = AUV wireless protocol
Terminology
Just some terminology.

Arcticopter IVCurrent model with focus on aerial photography.

Arctiflyer IArdupilot Mega installed in a fixed wing system. You can see the GPS (front) and xbee radio (rear). The Audupilot Mega is inside.

KapteinKuk KKBoard
3 Gyros4 inputs
4-6 outputsATMega48PA:
4k ROM1K SRAM
ATMEL Assembler
original board -->
One of the original boards. I love it partly because it was the first quadcopter I flew, and partly because it’s basically 7 parts with 4k of ATMEL assembler.

MultiWii
Arduino Mini3-axis gyro
4 inputs4-8 outputs
optional:3-axis accelerometer
barometermagentometer
The MultiWii. The Arcticopter IV has camera stabilization output.

Ardupilot Mega
Gyro (3 axis)Accelerometer (3 axis)
BarometerThermometer
Data Logger (16M)I2C Port
Battery Voltage MonitorGPS
Hardware RC DecoderSwitches (2)
RelayExtra I/O ports
The Ardupilot Mega is much more fully featured.

Ardupilot MegaThe shield is named “Oilpan”

optional:MagnetometerCurrent Sensor
AirspeedSonar
Other sensors

Ardupilot MegaSystem Diagram.

PlannerBase Station software runs on Windows. I run it under VMWare Fusion on my Mac and it works fine.

Ardupilot Flight Modes• Manual - standard RC controls
• Stabilized - keep wings level when sticks in neutral position
• Fly-By-Wire - APM controls flight, takes directional input from transmitter
• Auto: navigates downloaded waypoints
• Return-to-Home: back to launch point
• Loiter: circle over current location

FPV and APSome shots from the air

To Do• More Sensors (airspeed, battery, sonar)
• Larger Airframe (quad and fixed wing)
• Larger Camera
• Gimbaled Camera Mount
• Better Ground Control Setup(more portable)
• Integrate Camera Control with Radio
• Longer Missions
What a long list!

BE CAREFUL!
Specifically, take off your props when you’re working.
But if you’re not careful...

Post the results onto RCGroups! There’s a forum thread for people that have gotten bit. Did you ever wonder why they call them “blades”?

More Information
• http://markharrison.net/drones
• http://eastbay-rc.blogspot.com
• http://www.youtube.com/user/marhar2
• http://diydrones.com
• http://rcgroups.com
• Presentation sharing policy:share and enjoy!
Good Luck!