basics in geostatistics geostatistical interpolation ... · pdf filebasics in geostatistics 2...
TRANSCRIPT
Basics in Geostatistics 2Geostatistical interpolation/estimation:
Kriging methods
Hans Wackernagel
MINES ParisTech
NERSC • April 2013
http://hans.wackernagel.free.fr

Basic concepts
Geostatistics
Hans Wackernagel (MINES ParisTech) Basics in Geostatistics 2 NERSC • April 2013 2 / 35
Concepts
Geostatistical model
The experimental variogram is used to analyzethe spatial structure of the data from aregionalized variable z(x).It is fitted with a nested variogram model, thusproviding the structure function of a randomfunction.The regionalized variable (reality) is viewed asone realization of the random function Z(x),which is a collection of random variables.
Kriging: a linear regression method for estimatingpoint values (or spatial averages) at any locationof a region.
Conditional simulation: simulation of an ensemble ofrealizations of a random function,conditional upon data — for non-linear estimation.

Concepts
Geostatistical model
The experimental variogram is used to analyzethe spatial structure of the data from aregionalized variable z(x).It is fitted with a nested variogram model, thusproviding the structure function of a randomfunction.The regionalized variable (reality) is viewed asone realization of the random function Z(x),which is a collection of random variables.
Kriging: a linear regression method for estimatingpoint values (or spatial averages) at any locationof a region.
Conditional simulation: simulation of an ensemble ofrealizations of a random function,conditional upon data — for non-linear estimation.
Concepts
Geostatistical model
The experimental variogram is used to analyzethe spatial structure of the data from aregionalized variable z(x).It is fitted with a nested variogram model, thusproviding the structure function of a randomfunction.The regionalized variable (reality) is viewed asone realization of the random function Z(x),which is a collection of random variables.
Kriging: a linear regression method for estimatingpoint values (or spatial averages) at any locationof a region.
Conditional simulation: simulation of an ensemble ofrealizations of a random function,conditional upon data — for non-linear estimation.
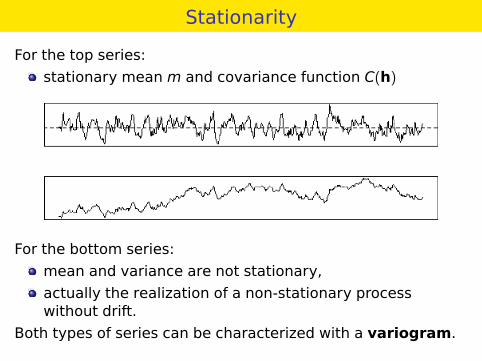
Stationarity
For the top series:
stationary mean m and covariance function C(h)
For the bottom series:
mean and variance are not stationary,
actually the realization of a non-stationary processwithout drift.
Both types of series can be characterized with a variogram.

Kriging of the mean
Kriging of the mean of a random function
Hans Wackernagel (MINES ParisTech) Basics in Geostatistics 2 NERSC • April 2013 5 / 35
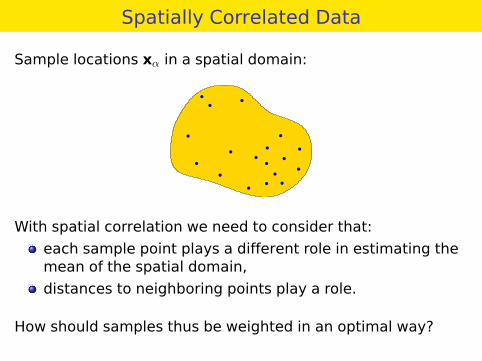
Spatially Correlated Data
Sample locations xα in a spatial domain:
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
With spatial correlation we need to consider that:
each sample point plays a different role in estimating themean of the spatial domain,
distances to neighboring points play a role.
How should samples thus be weighted in an optimal way?
Estimation of the Mean Value
Using the arithmetic mean:
M? =1n
n∑α=1
Z(xα)
all samples get the same weight:1n
We rather need an estimator:
M? =n∑
α=1
wα Z(xα)
with weights wα reflecting the spatial correlation.
Stationary random function
We assume translation-invariance of the mean:
∀x ∈ D : E[Z(x)
]= m
and of the covariance:
∀xα,xβ ∈ D with xα−xβ = h : cov(Z(xα),Z(xβ)) = C(xα−xβ) = C(h)
Unbiased estimator
The estimation error in our statistical model:
M?︸ ︷︷ ︸estimated value
− m︸ ︷︷ ︸true value
should be zero on average:
E[M? −m
]= 0
No bias: the estimator M? does not on average yield avalue that is different from m.
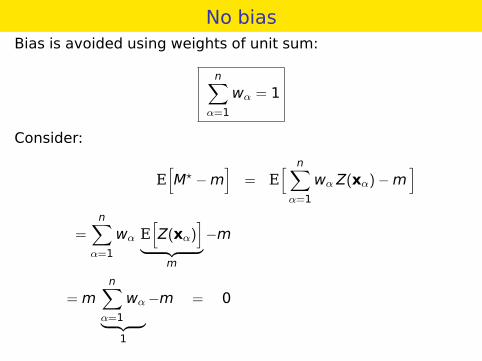
No biasBias is avoided using weights of unit sum:
n∑α=1
wα = 1
Consider:
E[M? −m
]= E
[ n∑α=1
wα Z(xα)−m]
=n∑
α=1
wα E[Z(xα)
]︸ ︷︷ ︸
m
−m
= mn∑
α=1
wα︸ ︷︷ ︸1
−m = 0
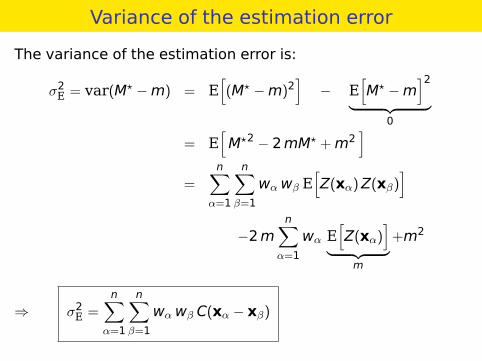
Variance of the estimation error
The variance of the estimation error is:
σ2E = var(M? −m) = E
[(M? −m)2
]− E
[M? −m
]2︸ ︷︷ ︸
0
= E[M?2 − 2mM? +m2
]=
n∑α=1
n∑β=1
wαwβ E[Z(xα)Z(xβ)
]
−2mn∑
α=1
wα E[Z(xα)
]︸ ︷︷ ︸
m
+m2
⇒ σ2E =
n∑α=1
n∑β=1
wαwβ C(xα − xβ)
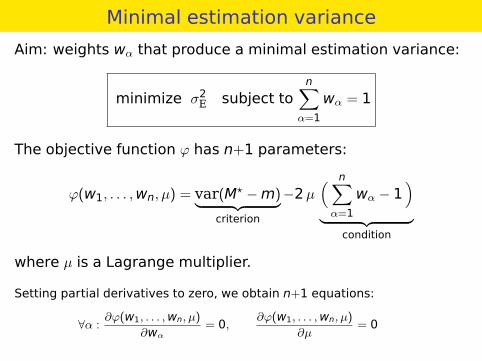
Minimal estimation variance
Aim: weights wα that produce a minimal estimation variance:
minimize σ2E subject to
n∑α=1
wα = 1
The objective function ϕ has n+1 parameters:
ϕ(w1, . . . ,wn, µ) = var(M? −m)︸ ︷︷ ︸criterion
−2µ( n∑α=1
wα − 1)
︸ ︷︷ ︸condition
where µ is a Lagrange multiplier.
Setting partial derivatives to zero, we obtain n+1 equations:
∀α :∂ϕ(w1, . . . ,wn, µ)
∂wα= 0,
∂ϕ(w1, . . . ,wn, µ)
∂µ= 0

Kriging equations
The method of Lagrange yields the equation system forthe optimal weights wKM
α of the estimation of the mean:
n∑β=1
wKMβ C(xα − xβ)− µKM = 0 for α = 1, . . . ,n
n∑β=1
wKMβ = 1
The variance at the minimum:
σ2KM = µKM
is equal to the Lagrange multiplier.
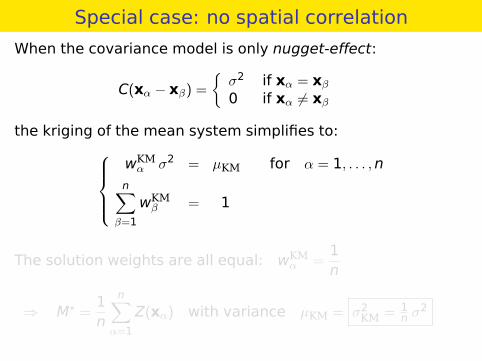
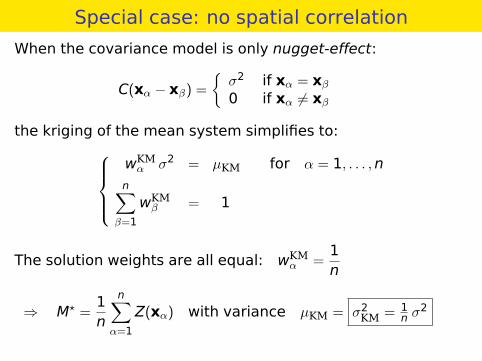
Special case: no spatial correlation
When the covariance model is only nugget-effect:
C(xα − xβ) ={σ2 if xα = xβ0 if xα 6= xβ
the kriging of the mean system simplifies to:wKMα σ2 = µKM for α = 1, . . . ,n
n∑β=1
wKMβ = 1
The solution weights are all equal: wKMα =
1n
⇒ M? =1n
n∑α=1
Z(xα) with variance µKM = σ2KM = 1
n σ2
Special case: no spatial correlation
When the covariance model is only nugget-effect:
C(xα − xβ) ={σ2 if xα = xβ0 if xα 6= xβ
the kriging of the mean system simplifies to:wKMα σ2 = µKM for α = 1, . . . ,n
n∑β=1
wKMβ = 1
The solution weights are all equal: wKMα =
1n
⇒ M? =1n
n∑α=1
Z(xα) with variance µKM = σ2KM = 1
n σ2
Ordinary Kriging
Ordinary Kriging
Hans Wackernagel (MINES ParisTech) Basics in Geostatistics 2 NERSC • April 2013 15 / 35
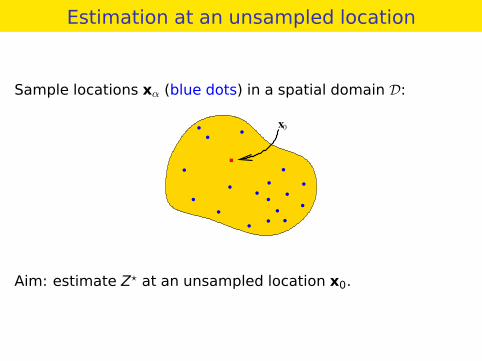
Estimation at an unsampled location
Sample locations xα (blue dots) in a spatial domain D:
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
x0
■
●
●
Aim: estimate Z? at an unsampled location x0.
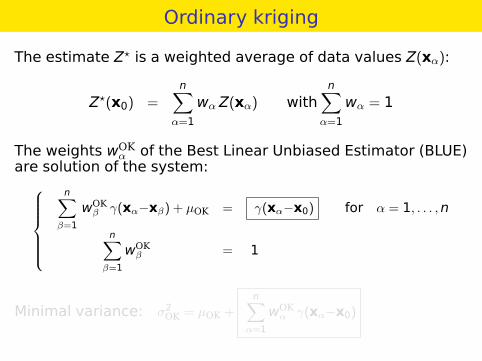
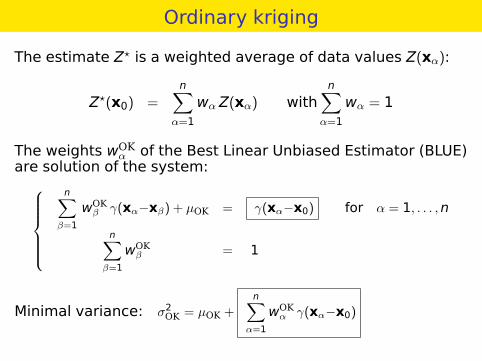
Ordinary kriging
The estimate Z? is a weighted average of data values Z(xα):
Z?(x0) =n∑
α=1
wα Z(xα) withn∑
α=1
wα = 1
The weights wOKα of the Best Linear Unbiased Estimator (BLUE)
are solution of the system:
n∑β=1
wOKβ γ(xα−xβ) + µOK = γ(xα−x0) for α = 1, . . . ,n
n∑β=1
wOKβ = 1
Minimal variance: σ2OK = µOK +
n∑α=1
wOKα γ(xα−x0)
Ordinary kriging
The estimate Z? is a weighted average of data values Z(xα):
Z?(x0) =n∑
α=1
wα Z(xα) withn∑
α=1
wα = 1
The weights wOKα of the Best Linear Unbiased Estimator (BLUE)
are solution of the system:
n∑β=1
wOKβ γ(xα−xβ) + µOK = γ(xα−x0) for α = 1, . . . ,n
n∑β=1
wOKβ = 1
Minimal variance: σ2OK = µOK +
n∑α=1
wOKα γ(xα−x0)
Kriging weights
The behavior of kriging weights
Hans Wackernagel (MINES ParisTech) Basics in Geostatistics 2 NERSC • April 2013 18 / 35
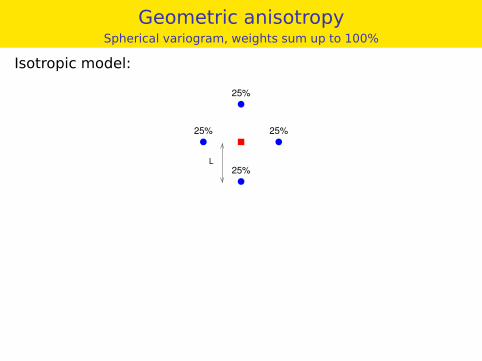
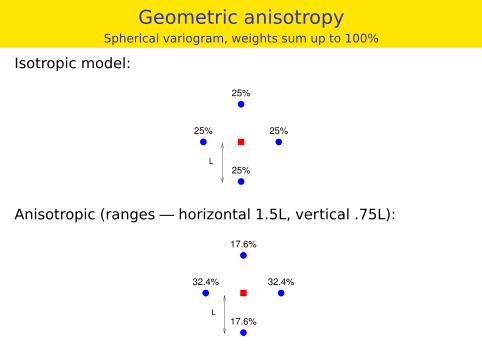
Geometric anisotropySpherical variogram, weights sum up to 100%
Isotropic model:
●
●
■ ●
L
25%
25%
25%
●
25%
Anisotropic (ranges — horizontal 1.5L, vertical .75L):
●
●
■ ●
L
17.6%
32.4%
17.6%
●
32.4%
Geometric anisotropySpherical variogram, weights sum up to 100%
Isotropic model:
●
●
■ ●
L
25%
25%
25%
●
25%
Anisotropic (ranges — horizontal 1.5L, vertical .75L):
●
●
■ ●
L
17.6%
32.4%
17.6%
●
32.4%
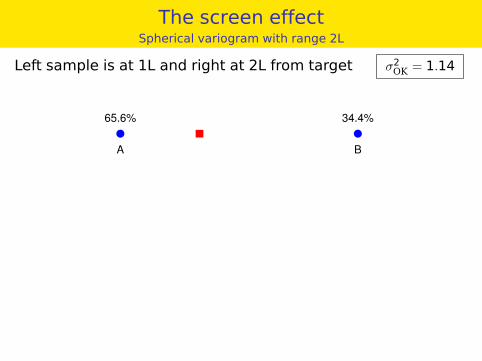
The screen effectSpherical variogram with range 2L
Left sample is at 1L and right at 2L from target σ2OK = 1.14
A B
● ■ ●
34.4%65.6%
Introducing an extra sample σ2OK = 0.87
A
● ■
49.1%
C
●
48.2%
B
●
2.7%
Adding the sample C screens off the sample B.

The screen effectSpherical variogram with range 2L
Left sample is at 1L and right at 2L from target σ2OK = 1.14
A B
● ■ ●
34.4%65.6%
Introducing an extra sample σ2OK = 0.87
A
● ■
49.1%
C
●
48.2%
B
●
2.7%
Adding the sample C screens off the sample B.
Case-study
Filtering noisy images by cokriging
Hans Wackernagel (MINES ParisTech) Basics in Geostatistics 2 NERSC • April 2013 21 / 35
Application: metallography
Trace elements are usually masked by instrumental noise.
Data: 512×512 image of phosphorus (P) trace elements.
Images for chrome (Cr) and (Ni) are less noisy.
Geostatistical filtering is used to remove the noise.

Structural analysis
Image of phosphorus Nested variogramγ(h) = 384 nug(h) + 75 exp(h) + 13 |h|
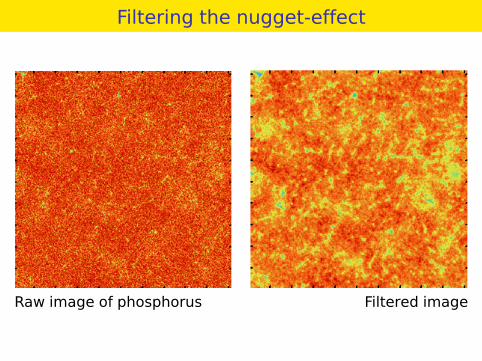
Filtering the nugget-effect
Raw image of phosphorus Filtered image
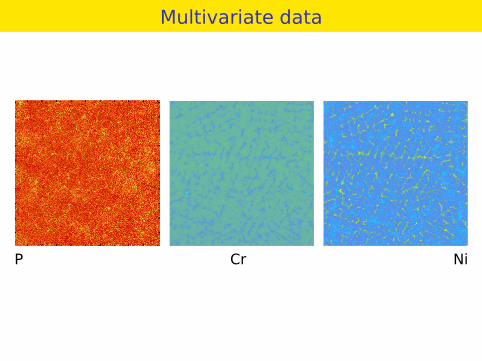
Multivariate data
P Cr Ni

Multivariate structural analysisDirect and cross variograms
Matrix variogram model: G(h) = B0 nug(h) + B1 exp(h) + B1 |h|
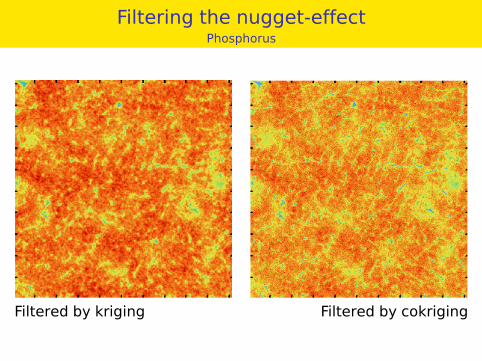
Filtering the nugget-effectPhosphorus
Filtered by kriging Filtered by cokriging
Case study
Space-time filteringSéguret & Huchon, JGR 1990
Hans Wackernagel (MINES ParisTech) Basics in Geostatistics 2 NERSC • April 2013 28 / 35
Earth magnetism
Magnetic anomalies are essential to study earth history.
Magnetism is influenced by several external factors like:
solar wind explaining daily fluctuations(period: 24 hours)rotation of the moon around the earth(period: 28 days)solar perturbartions(half-year cycle)
Available data:
SEAPERC campaign (Ifremer, 1986) Data from a researchvessel about magnetism over a fractured area of111 km² off Peru.
Fluctuations of earth magnetism Measurements at a Peruvianobservatory for the time period of the campaign.
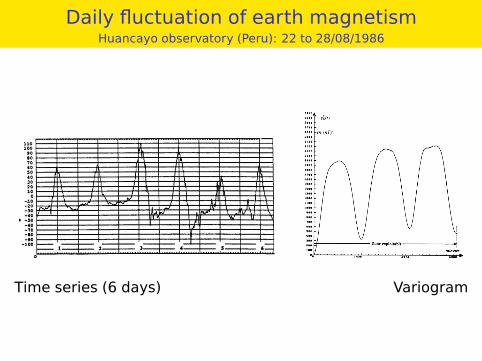
Daily fluctuation of earth magnetismHuancayo observatory (Peru): 22 to 28/08/1986
Time series (6 days) Variogram
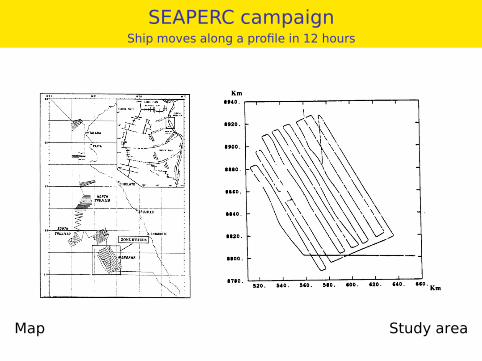
SEAPERC campaignShip moves along a profile in 12 hours
Map Study area
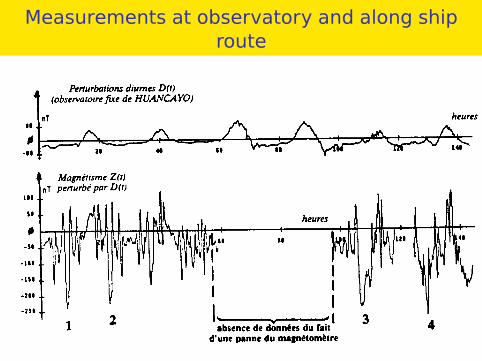
Measurements at observatory and along shiproute
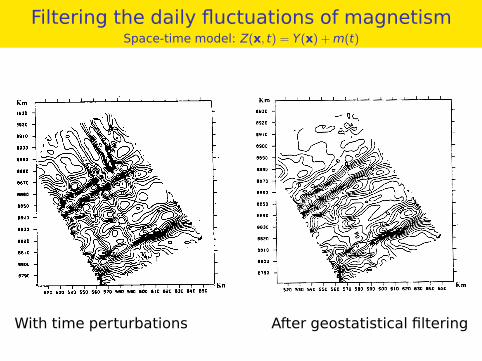
Filtering the daily fluctuations of magnetismSpace-time model: Z(x, t) = Y(x) +m(t)
With time perturbations After geostatistical filtering
Conclusion
Summary
We have seen:
how to set up a variogram model and a correspondingrandom function model with several components,
that these components can be extracted by kriging,
that this applies to multivariate or space-time filteringproblems.
These methods are based on estimators that arelinear combinations (weighted averages) of data.
However we often are asked to estimate statisticsthat are not linearly related to data. We will see next how toprovide answers by geostatistical simulation.
Hans Wackernagel (MINES ParisTech) Basics in Geostatistics 2 NERSC • April 2013 34 / 35
References
JP Chilès and P Delfiner.Geostatistics: Modeling Spatial Uncertainty.Wiley, New York, 2nd edition, 2012.
G Matheron.The Theory of Regionalized Variables and its Applications.Number 5 in Les Cahiers du Centre de MorphologieMathématique. Ecole des Mines de Paris, Fontainebleau,1970.
S Séguret and P Huchon.Trigonometric kriging: a new method for removing thediurnal variation from geomagnetic data.J. Geophysical Research, 32(B13):21.383–21.397, 1990.
H Wackernagel.Multivariate Geostatistics: an Introduction withApplications.Springer-Verlag, Berlin, 3rd edition, 2003.