darpa tmr program collaborative mobile robots for high-risk urban missions third quarterly ipr...
TRANSCRIPT

DARPA TMR ProgramDARPA TMR Program
Collaborative Mobile Robots forCollaborative Mobile Robots forHigh-Risk Urban MissionsHigh-Risk Urban Missions
Third Quarterly IPR MeetingThird Quarterly IPR Meeting
May 11, 1999 May 11, 1999
P. I.s: Leonidas J. Guibas and Jean-Claude LatombeP. I.s: Leonidas J. Guibas and Jean-Claude Latombe
Computer Science DepartmentComputer Science Department
Stanford UniversityStanford University
http://underdog.stanford.edu/tmrhttp://underdog.stanford.edu/tmr
P.I.s: P.I.s: Profs. Leonidas J. Guibas and Jean-Claude LatombeProfs. Leonidas J. Guibas and Jean-Claude Latombe.. Post-docs:Post-docs:
– Alon EfratAlon Efrat: map building, target finding.: map building, target finding.– T. M. MuraliT. M. Murali: map building, target finding.: map building, target finding.– Rafael MurrietaRafael Murrieta: target tracking, robot experiments. : target tracking, robot experiments.
Ph. D. Students:Ph. D. Students:– H. Gonzalez-BanosH. Gonzalez-Banos: map building, target tracking.: map building, target tracking.– Cheng-Yu LeeCheng-Yu Lee: target finding in 3D.: target finding in 3D.– David LinDavid Lin: target finding in 2D.: target finding in 2D.
Research GroupResearch Group
Three primary tasks:Three primary tasks:– MapMap buildingbuilding: Given no or partial a priori map, navigate : Given no or partial a priori map, navigate
robots in the environment to collect data to form a robots in the environment to collect data to form a 2D/3D map.2D/3D map.
– Target findingTarget finding: Sweep environment with the robots to : Sweep environment with the robots to detect and localise potential targets in 3D.detect and localise potential targets in 3D.
– Target trackingTarget tracking: Move robots to maintain visibility of : Move robots to maintain visibility of detected targets in 3D environment.detected targets in 3D environment.
Research FocusResearch Focus
Gather information in an urban environment.Gather information in an urban environment.– Automatic generation of motion strategies.Automatic generation of motion strategies.
– Multiple autonomous but coordinated robots.Multiple autonomous but coordinated robots.

4
Research PhilosophyResearch Philosophy
Plan in 2D, sense/respond in 3DPlan in 2D, sense/respond in 3D Robots move in 2D but sensors are 3D.Robots move in 2D but sensors are 3D.
– Build 3D models.Build 3D models.
– Find targets even if they are not on the floor.Find targets even if they are not on the floor.
– Track targets when they move off the floor.Track targets when they move off the floor. Sensor independenceSensor independence
– Software takes sensor parameters as input.Software takes sensor parameters as input.
– Software adapts to different sensor properties.Software adapts to different sensor properties.

Challenges and IssuesChallenges and Issues
Limitations of sensing capabilities:Limitations of sensing capabilities:– Range (minimum and maximum).Range (minimum and maximum).
– Incidence angle.Incidence angle. Limitations exist both in 2D and 3D.Limitations exist both in 2D and 3D.

Challenges and IssuesChallenges and Issues
Errors in sensing and localisation.Errors in sensing and localisation. Algorithms have to take registration and Algorithms have to take registration and
alignment constraints into account.alignment constraints into account.

Map BuildingMap Building Task: Navigate robots in a building to collect data to form Task: Navigate robots in a building to collect data to form
a 2D/3D map.a 2D/3D map. Goal: Generate Goal: Generate efficientefficient multi-robot exploration strategies. multi-robot exploration strategies. Techniques:Techniques:
– Build 2D map using next-best view technique.Build 2D map using next-best view technique.– Build 3D map using art-gallery algorithm.Build 3D map using art-gallery algorithm.
Result: 2D layout and 3D model.Result: 2D layout and 3D model.

Map-Building StrategyMap-Building Strategy
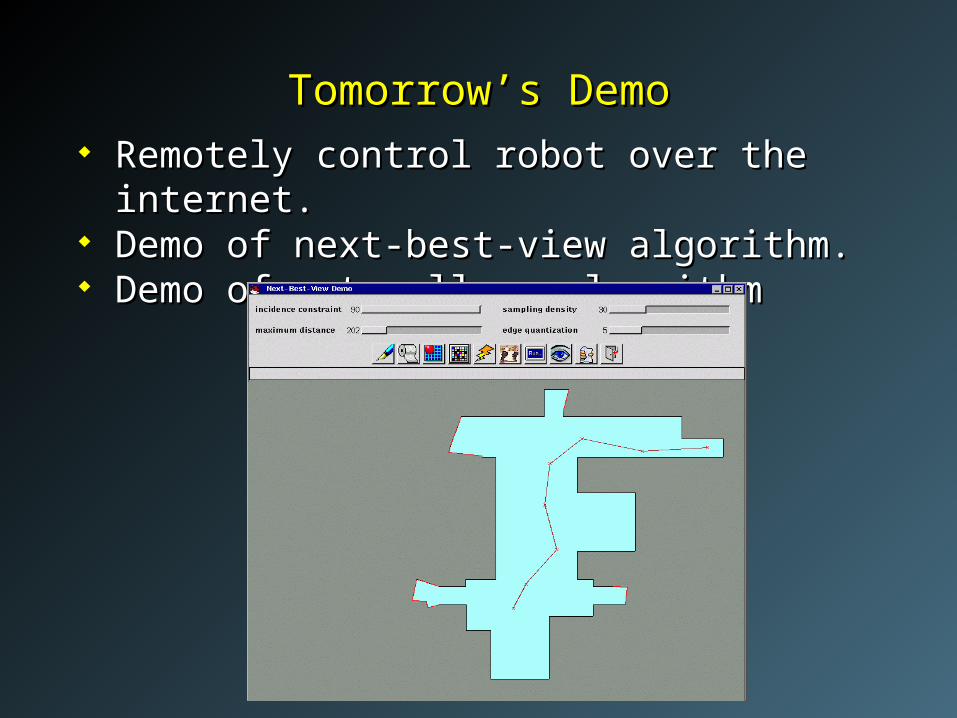
Tomorrow’s DemoTomorrow’s Demo Remotely control robot over the internet.Remotely control robot over the internet. Demo of next-best-view algorithm.Demo of next-best-view algorithm. Demo of art-gallery algorithmDemo of art-gallery algorithm

2D Map: Next-Best-View Algorithm2D Map: Next-Best-View Algorithm
Task: Given current view and a partial model, Task: Given current view and a partial model, compute the next sensing location.compute the next sensing location.– take sensor limitations into account.take sensor limitations into account.
– reach next viewpoint without collision.reach next viewpoint without collision.
– ensure overlap between views to allow registration.ensure overlap between views to allow registration. Goal: Goal: reduce number of sensing locations.reduce number of sensing locations.
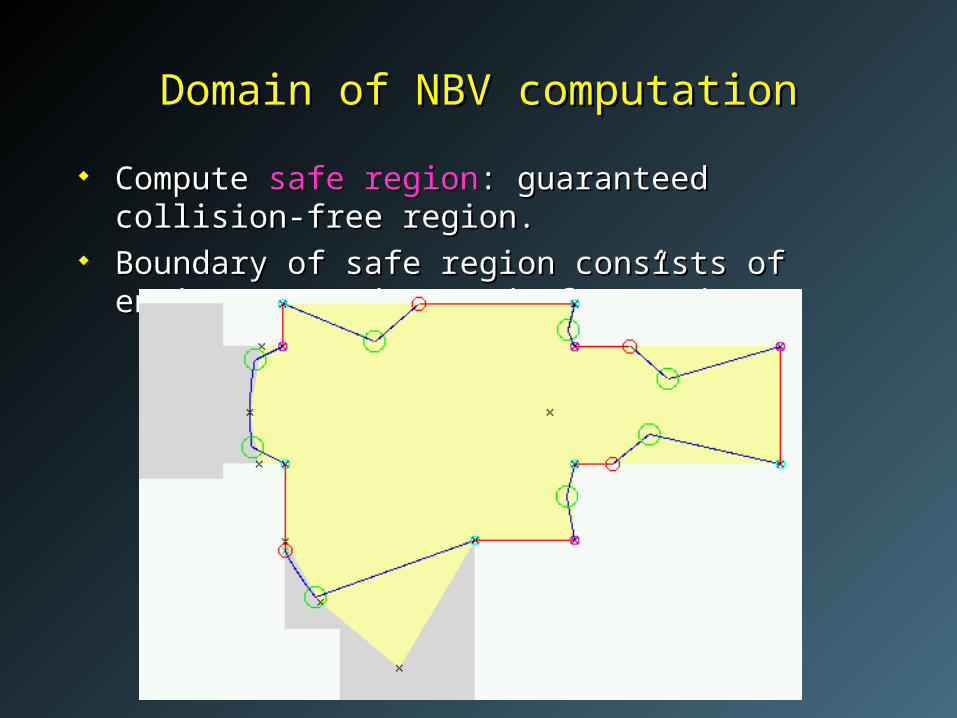
Domain of NBV computationDomain of NBV computation
Compute Compute safe regionsafe region: guaranteed collision-free region.: guaranteed collision-free region. Boundary of safe region consists of environment edges Boundary of safe region consists of environment edges
and “free” edges.and “free” edges.

Computing the next-best viewComputing the next-best view
Compute next-best view using random sampling.Compute next-best view using random sampling. Sample points in the interior of safe region.Sample points in the interior of safe region. Next location is sample with highest potential.Next location is sample with highest potential.
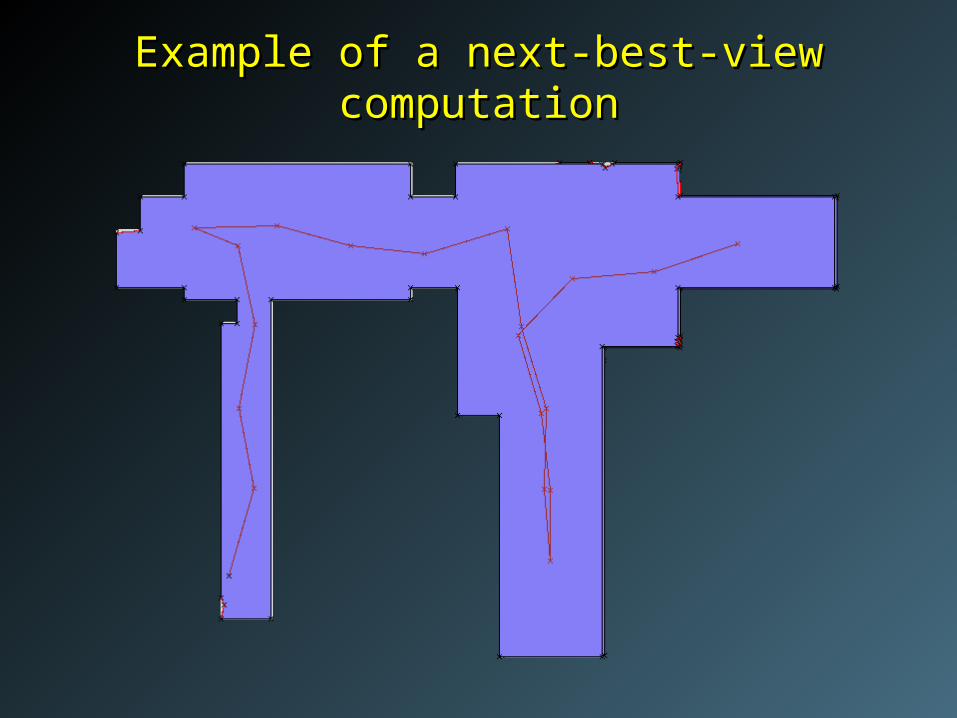
Example of a next-best-view computationExample of a next-best-view computation
3D Map: Art-Gallery Algorithm3D Map: Art-Gallery Algorithm
Task: given a 2D map, compute a set of locations Task: given a 2D map, compute a set of locations in the map for 3D sensing. in the map for 3D sensing.– each boundary point should be visible from some each boundary point should be visible from some
location. location.
– take sensor’s 3D limitations into account.take sensor’s 3D limitations into account.
– ensure overlap between views to allow registration.ensure overlap between views to allow registration. Goal: Goal: compute a small set of locations.compute a small set of locations.
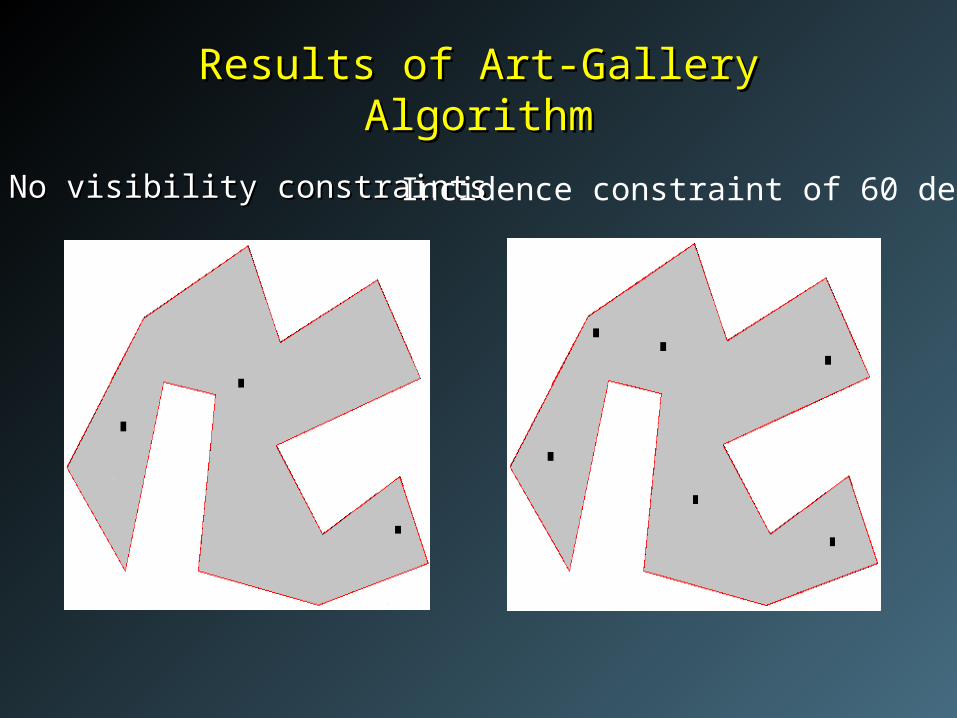
Results of Art-Gallery AlgorithmResults of Art-Gallery Algorithm
No visibility constraintsNo visibility constraints Incidence constraint of 60 deg.
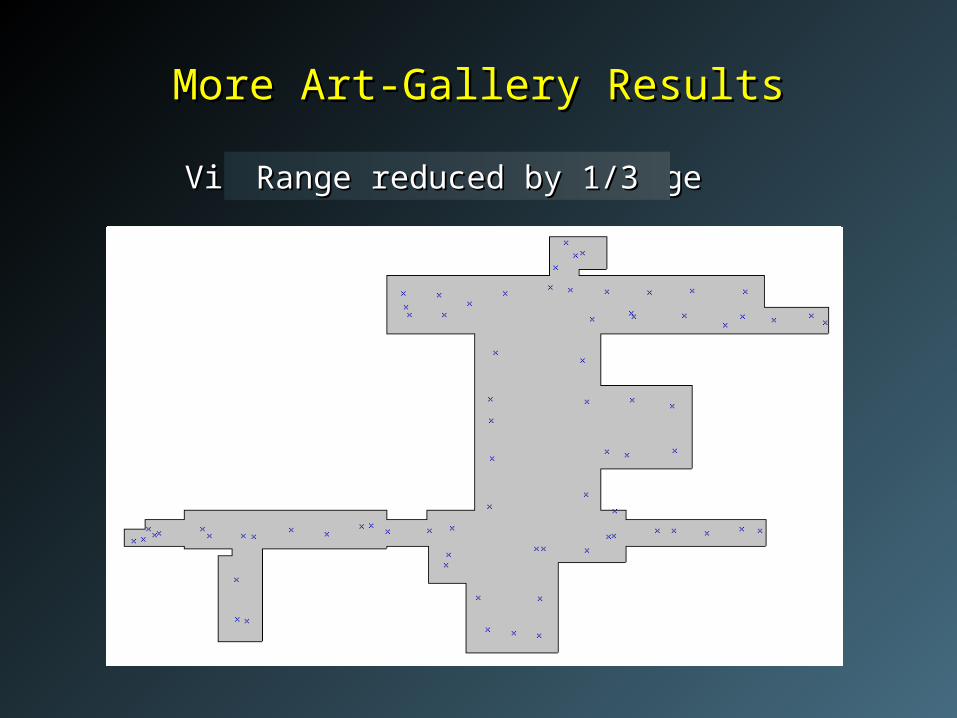
More Art-Gallery ResultsMore Art-Gallery Results
Visibility bounded in rangeVisibility bounded in rangeRange reduced by 1/3Range reduced by 1/3
Features of Map-Building AlgorithmFeatures of Map-Building Algorithm
Makes global decisions.Makes global decisions.– Reduces total distance travelled, number of sensing Reduces total distance travelled, number of sensing
locations.locations. Scales to multiple robots:Scales to multiple robots:
– in 2D: Send robots to sampled locations with high in 2D: Send robots to sampled locations with high potential that are far apart. potential that are far apart.
– in 3D: Cluster sensing locations, send robots to in 3D: Cluster sensing locations, send robots to different clusters. different clusters.
Minimises number of 3D sensing operations.Minimises number of 3D sensing operations.

18
Implemented Implemented next-best view plannernext-best view planner for constructing 2D for constructing 2D model of an urban environment.model of an urban environment.
Implemented Implemented target-finding plannertarget-finding planner for robots with cone for robots with cone vision.vision.
Implemented Implemented target-finding algorithm for aerial observertarget-finding algorithm for aerial observer moving in a set of buildings.moving in a set of buildings.
Developed algorithms for Developed algorithms for target-findingtarget-finding for a team of robots for a team of robots that that maintain communication links.maintain communication links.
Implemented Implemented real-time plannerreal-time planner for motion in the presence of for motion in the presence of moving obstacles.moving obstacles.
AchievementsAchievements
19
CollaborationCollaboration
SRI:SRI:– combining mapping and next-best-view software.combining mapping and next-best-view software.
– combining human tracking with target-tracking combining human tracking with target-tracking planner.planner.
SAIC:SAIC:– multi-robot target finding and target tracking multi-robot target finding and target tracking
algorithms. algorithms.

Progress to DateProgress to Date
Task Due Status
Algo. Impl.
Defining models Q2
Model buildingNext-best view algorithm Q2Computing positions for 3D sensing operations Q4
Target findingExtended visibility models Q3Overhead/aerial robot ---Communication maintenance ---
Target tracking Q4
Real-time planning (moving obstacles) ---