講義内容(11/13) - 東京大学5. 2自由度系の自由振動および強制振動 5.1...
TRANSCRIPT

2006/11/13 機械力学Ⅰ
講義内容(11/13)4. 1自由度系の強制振動
4.2 粘性減衰系の強制振動4.2.4 変位による強制振動
5. 2自由度系の自由振動および強制振動5.1 不減衰系の自由振動
5.1.1 運動方程式と解の求め方
5.1.2 ねじり系の自由振動
5.1.3 直進と回転が混在する系の自由振動
5.2 粘性減衰系の自由振動
演習 6.8,6.9,6.13

2006/11/13 機械力学Ⅰ
前回までの復習
配布資料
「1自由度系の振動まとめ」
講義録公開HPhttp://www.ems.k.u-tokyo.ac.jp/lecture.html
2006/11/13 機械力学Ⅰ
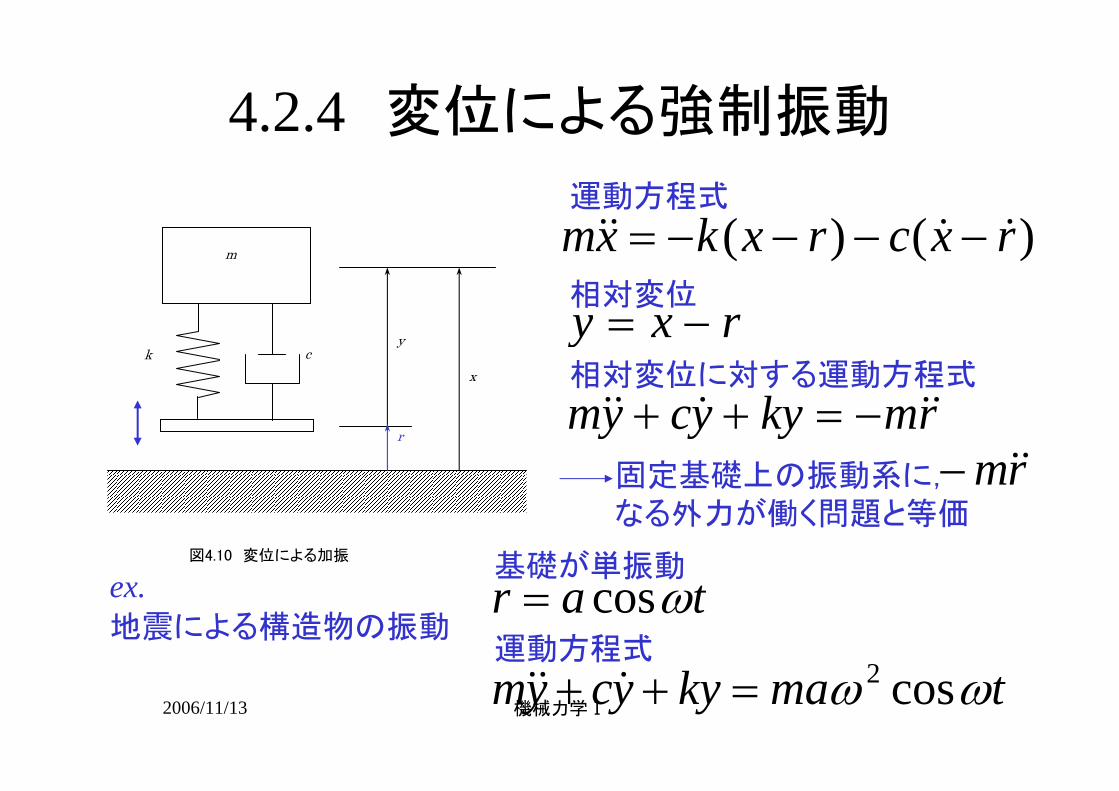
4.2.4 変位による強制振動
ex.地震による構造物の振動
図4.10 変位による加振
r
y
xk
m
c
運動方程式
)()( rxcrxkxm &&&& −−−−=
rxy −=
rmkyycym &&&&& −=++
相対変位
相対変位に対する運動方程式
固定基礎上の振動系に,なる外力が働く問題と等価
rm &&−
tar ωcos=
tmakyycym ωω cos2=++ &&&
基礎が単振動
運動方程式

2006/11/13 機械力学Ⅰ
特解
)cos( φω −= tBy
( ) ( ) 22
222222
2
412
⎟⎠⎞
⎜⎝⎛+
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−⎟⎠⎞
⎜⎝⎛
=+−
=
ωωζ
ωωωζωωω
ω
nnnn
aaB
222
tanωωωζω
φ−
=n
nB
ωnωo
ς2a
a
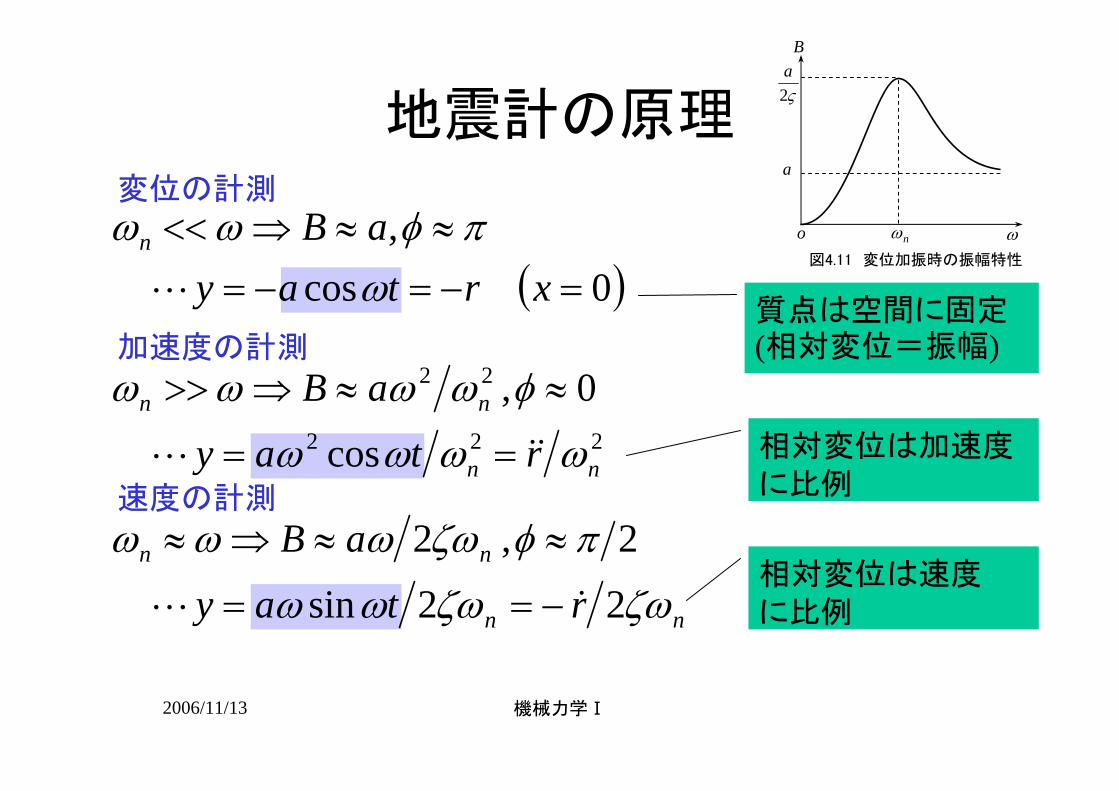
図4.11 変位加振時の振幅特性
振幅応答(力による強制振動と比較)
aBaaB
aB
nn
n
→⇒∞→→≈⇒=
→≈⇒→
ωζζωωωω
ωωω22
00 22
2006/11/13 機械力学Ⅰ
( )0cos,
=−=−=≈≈⇒<<
xrtayaBn
ωπφωω
L
地震計の原理変位の計測
加速度の計測
速度の計測
質点は空間に固定(相対変位=振幅)
相対変位は加速度に比例
相対変位は速度に比例
B
ωnωo
ς2a
a
図4.11 変位加振時の振幅特性
222
22
cos
0,
nn
nn
rtay
aB
ωωωω
φωωωω&&L ==
≈≈⇒>>
nn
nn
rtay
aB
ζωζωωω
πφζωωωω
22sin
2,2&L −==
≈≈⇒≈
2006/11/13 機械力学Ⅰ
実演
Interactive PhysicsMSC. Software Corp.
http://www.interactivephysics.com

2006/11/13 機械力学Ⅰ
5. 2自由度系の自由振動
および強制振動
2006/11/13 機械力学Ⅰ
5.1 不減衰系の自由振動

2006/11/13 機械力学Ⅰ
5.1.1 運動方程式と解の求め方
図4.1 2自由度ばね質量系
k3
k2
m1
m2
x1
x2
k1
運動方程式
( )2121111 xxkxkxm −−−=&&
( ) 2312222 xkxxkxm −−−=&&
( ) 02212111 =−++ xkxkkxm &&
( ) 02321222 =++− xkkxkxm &&
行列表示
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+−
−++
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡00
00
2
1
322
221
2
1
2
1
xx
kkkkkk
xx
mm
&&
&&
質量行列(対角行列) 剛性行列(対称行列)
Maxwellの相反定理

2006/11/13 機械力学Ⅰ
基本解
( )φω +⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
tXX
xx
cos2
1
2
1
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+−
−++
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡−
00
00
2
1
322
221
2
1
2
12
XX
kkkkkk
XX
mm
ω
[ ]{ } [ ]{ } { }02 =+− XKXMω 一般化固有値問題
固有値 固有ベクトル
{ } [ ] [ ]( ){ }XKMX 12 −=ωまたは

2006/11/13 機械力学Ⅰ
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
−+−−−+
00
2
12
2322
22
121
XX
mkkkkmkk
ωω
固有値(固有振動数)の計算
X1、X2がゼロ以外の解 ⇒ 行列式⊿=0
( )( ) 021
2232212
2
32
1
21421
22322
22
121
=⎥⎦
⎤⎢⎣
⎡ −+++⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++
+−=
−+−−−+
=Δ
mmkkkkk
mkk
mkkmm
mkkkkmkk
ωω
ωω
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛ +−
+⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
21
22
2
2
32
1
21
2
32
1
2122
21
421,
mmk
mkk
mkk
mkk
mkk
mωω
1次、2次固有振動数
特性方程式(振動数方程式)

2006/11/13 機械力学Ⅰ
固有ベクトルの計算(1次モード)
( )( )⎪⎩
⎪⎨⎧
=−++−
=−−+
0
0
212
1232112
212112
1121
XmkkXk
XkXmkk
ω
ω
⎭⎬⎫
⎩⎨⎧
→21
111 X
Xω
121223
2
2
21121
11
21 λω
ω=
−+=
−+=
mkkk
kmkk
XX
振幅の比一定
固有モードベクトル;
( )01
11
>⎭⎬⎫
⎩⎨⎧
λλ
(1次)固有モードベクトル

2006/11/13 機械力学Ⅰ
固有ベクトルの計算(2次モード)
( )( )⎪⎩
⎪⎨⎧
=−++−
=−−+
0
0
222
2232122
222122
2121
XmkkXk
XkXmkk
ω
ω
⎭⎬⎫
⎩⎨⎧
→22
122 X
Xω
222223
2
2
22121
12
22 λω
ω=
−+=
−+=
mkkk
kmkk
XX
( )01
22
<⎭⎬⎫
⎩⎨⎧
λλ
(2次)固有モードベクトル
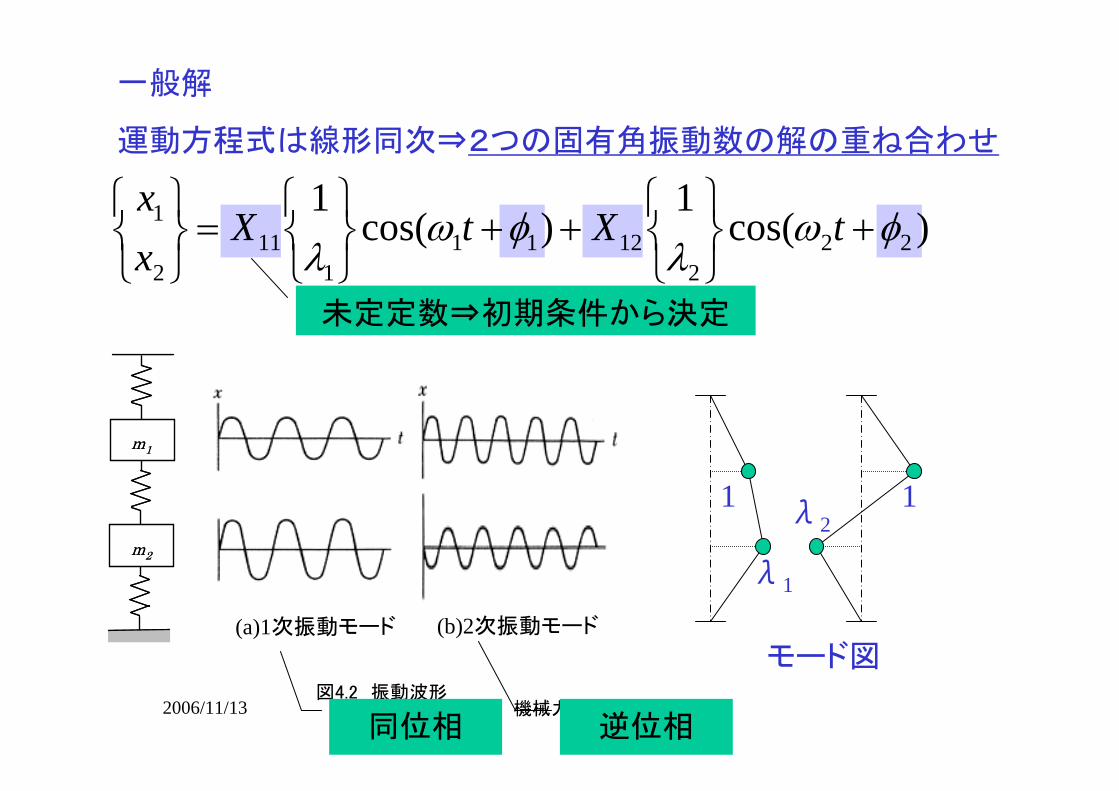
2006/11/13 機械力学Ⅰ図4.2 振動波形
(a)1次振動モード (b)2次振動モード
m1
m2
m1
m2
一般解
運動方程式は線形同次⇒2つの固有角振動数の解の重ね合わせ
未定定数⇒初期条件から決定
)cos(1
)cos(1
222
12111
112
1 φωλ
φωλ
+⎭⎬⎫
⎩⎨⎧
++⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
tXtXxx
同位相 逆位相
モード図
1
λ1
1λ2

2006/11/13 機械力学Ⅰ
例題
mmmkkkk ===== 21321 ,
mk
mk
mk
mk
mmk
mkk
mkk
mkk
mkk
3,2421
421,
21
22
2
2
32
1
21
2
32
1
2122
21
=⎥⎦⎤
⎢⎣⎡=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛ +−
+⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
m
mωω
mk
mk 3,, 21 =ωω
1
1
22223
2
2
22121
12
222
21223
2
2
21121
11
211
−=−+
=−+
==
=−+
=−+
==
ωωλ
ωωλ
mkkk
kmkk
XX
mkkk
kmkk
XX
固有角振動数
固有モード
1次 2次
1
1
1
-1
2006/11/13 機械力学Ⅰ
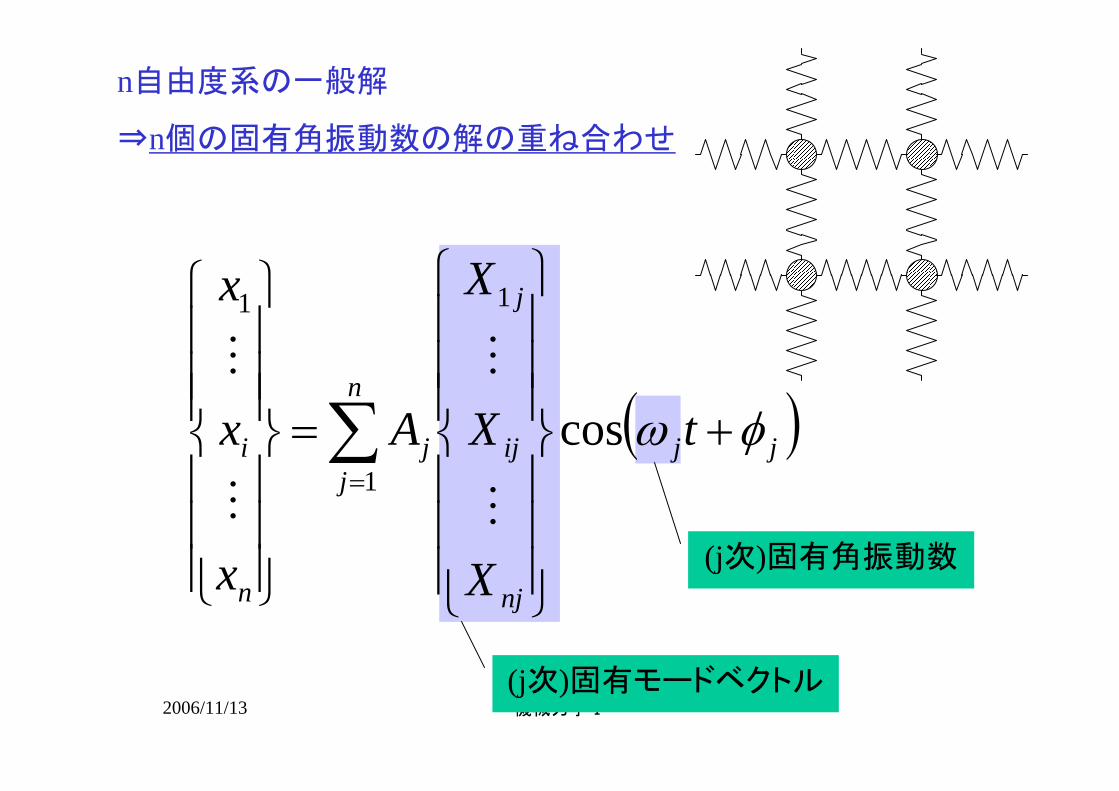
n自由度系の一般解
⇒n個の固有角振動数の解の重ね合わせ
( )∑=
+
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
n
jjj
nj
ij
j
j
n
i t
X
X
X
A
x
x
x
1
11
cos φω
M
M
M
M
(j次)固有モードベクトル
(j次)固有角振動数

2006/11/13 機械力学Ⅰ
m1
m2
m3
k1
k2
k3
k4
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=M
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=K
m1
m2
m3
+k2
+k1 -k1
-k1 +k1 +k3
+k3
-k3
-k3 +k4
多自由度系の運動方程式の立て方(おまけ)
・対角は+・対称行列
・対角行列

2006/11/13 機械力学Ⅰ
多自由度系解析の例~Multi-body dynamics 提供 ㈱電通国際情報サービス

2006/11/13 機械力学Ⅰ
5.1.2 ねじり系の自由振動
運動方程式
行列表示質量行列(対角行列) 剛性行列(対称行列)
図4.3 2自由度ねじり系
円板1
円板2
I1
I2
θ1
θ2
k1
k2
( )21212
11 θθθ −−−= kkI &&
( )122222 θθθ −−= kI &&
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡−
−++
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡00
00
2
1
22
221
2
1
2
1
θθ
θθ
kkkkk
II
&&
&&

2006/11/13 機械力学Ⅰ
5.1.3 直進と回転が混在する系の
自由振動運動方程式(自由度: x, θ )
行列表示
図4.4 並進と回転が混在する系
1l 2l
θ
x
1k 2k
( ) ( )θθ 2211 ll&& +−−−= xkxkxm
( ) ( )θθθ 222111 llll&& +−−= xkxkI
( )( ) ⎭
⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+−−−−+
+⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡00
00
222
2112211
221121
θθx
lklklklklklkkkx
Im
&&
&&

2006/11/13 機械力学Ⅰ
1x 2x
図4.5 x1,x2を自由度とする2自由度系
1l 2l
θ
x
1k 2k
x1、x2を自由度とする場合
21
12
21
2112 ,llxx
llxlxlx
+−
=++
= θ
⎥⎦
⎤⎢⎣
⎡−+
=⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
111][,][ 12
212
1 ll
llT
xx
Txθ
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+−
+⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡−+ 0
012
1
3211
21
2
112
21 xx
kkkk
xx
IImm
ll&&
&&ll
ll
x、θの運動方程式に代入
非対称 ⇒相反定理が成り立たない?!
変換行列

2006/11/13 機械力学Ⅰ
x1、x2を自由度とする運動方程式
x、θの運動方程式
[ ] [ ]⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
+⎭⎬⎫
⎩⎨⎧
00
θθx
Kx
M &&&&
[ ][ ] [ ][ ]⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
+⎭⎬⎫
⎩⎨⎧
00
2
1
2
1
xx
TKxx
TM&&
&&
両辺左から [T]t をかける
[ ] [ ][ ] [ ] [ ][ ]
[ ] ⎥⎦
⎤⎢⎣
⎡ −+
=
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
+⎭⎬⎫
⎩⎨⎧
111
00
1
2
21
2
1
2
1
ll
llT
xx
TKTxx
TMT
t
tt
&&
&&
対称行列

2006/11/13 機械力学Ⅰ
例題(タコマ橋の固有振動数)
⎪⎩
⎪⎨
⎧
−=⋅⎟⎠⎞
⎜⎝⎛⋅⋅−=
−=
θθθ22
2
222 kWWkI
kyyM
&&
&&k k
W
M,I θ
y
運動方程式
mkgMrImNk
mWmkgM
⋅××==
×=
=×=
232
3
3
8.4103.4/105.1
12/103.4
ssradI
kW
ssradMk
y
02.6/04.18.4103.42
12105.12
52.7/835.0103.4
105.122
23
232
3
3
→≈×××
××==
→≈×
××==
θω
ω

2006/11/13 機械力学Ⅰ
5.2 粘性減衰系の自由振動
図4.6 粘性減衰の自由振動
k3
k2
m1
m2
c3
c2
x1
x2
k1 c1 ( ) ( ) 0111121221211 =++−+−+ xcxkxxkxxcxm &&&&&
( ) ( ) 0232312212222 =++−+−+ xcxkxxkxxcxm &&&&&
teXx λ11 = teXx λ
22 =
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+−
−++
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+−
−++
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
00
00
2
1
322
221
2
1
322
221
2
1
2
12
XX
kkkkkk
XX
cccccc
XX
mm
λλ
運動方程式
基本解

2006/11/13 機械力学Ⅰ
( )( ) ⎭
⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
++++−−−−++++
00
2
1
323222
22
22212112
XX
kkccmkckckkccm
λλλλλλ
( ){ } ( ){ }{ } 02
22
323222
212112
=+−
++++++++=Δ
kc
kkccmkkccm
λ
λλλλ
X1、X2がゼロ以外の解 ⇒ 行列式⊿=0
特性方程式
⇒ λに関する4次方程式
⇒ 4つの根(ただし、複素根は共役のものの対)
⎭⎬⎫
⎩⎨⎧
++⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
24
14
22
11
2
1 41
XX
eXX
exx tt λλ L
22431121 ,,, ωσλλωσλλ jj ±=±=

2006/11/13 機械力学Ⅰ
振幅比
( )φ
φφjAe
jba
babj
baabajba
XX
=
++=
⎟⎟⎠
⎞⎜⎜⎝
⎛
++
++=+=
sincos22
2222
22
1
2
固有値
ωσλ j±=
( )⎪⎩
⎪⎨⎧
==
==+φωσφ
ωσλ
tjtj
tjtt
eeXxAex
eeXeXx
112
111Φ位相進み
Eulerの公式
;極形式

2006/11/13 機械力学Ⅰ
(演習問題補足)6.8 ポテンシャルエネルギの変化
釣合い位置=ポテンシャルエネルギが最小となる位置
(最小ポテンシャルエネルギの原理)
0
5
10
15
20
25
30
-180 -90 0 90 180
θ
U
0.01
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
k=1[N/m]a=1[m]m[kg]=
m大

H18 年度機械力学Ⅰ 2006.11.13 配布
1
1自由度系の振動まとめ
自由振動
非減衰振動 粘性減衰振動 運動方程式
mkxx
kxxm
nn ==+
=+
ωω ,0
0
2&&
&&
mkcxxx
kxxcxm
nn 2,02
0
2 ==++
=++
ζωξω &&&
&&&
基本解 tAex λ= 特性方程式
n
n
jωλωλ±=
=+ 022
( )1
022
2,1
22
−±−=
=++
ζζωλ
ωλζωλ
n
nn
一般解
tCtCxor
eCeCx
nn
tjtj nn
ωω
ωω
sincos 21
21
′+′=
+= −
2
21
1
2
1
1
1
sincos
122
ζωω
ωω
ζ
ζω
ωζζωζζ
−=
⎟⎠⎞⎜
⎝⎛ ′+′=
+=
<
−
⎟⎠⎞⎜
⎝⎛ −−−⎟
⎠⎞⎜
⎝⎛ −+−
nd
ddt
tjtj
tCtCexor
eCeCx
n
nn
1
sinhcosh
1
2
21
1
2
1
1
22
−=
⎟⎠⎞⎜
⎝⎛ ′+′=
+=
>
−
⎟⎠⎞⎜
⎝⎛ −−−⎟
⎠⎞⎜
⎝⎛ −+−
ζωω
ωω
ζ
ζω
ωζζωζζ
nh
hht
tt
tCtCexor
eCeCx
n
nn
tt nn teCeCx ωω
ζ−− +=
=
21
1

H18 年度機械力学Ⅰ 2006.11.13 配布
2
強制振動
非減衰振動 粘性減衰振動 運動方程式
tmFxx
tFkxxm
n ωω
ω
cos
cos
2 =+
=+
&&
&&
t
mFxxx
tFkxxcxm
nn ωωξω
ω
cos2
cos
2 =++
=++
&&&
&&&
特解
( )nnm
FA
tAx
ωωωω
ω
≠−
⋅=
=
22
1cos
( ) ( )
( ) ( )( )
( ) ( )
221
2
2222
22
21
22222
2222
22
1
21
2tan
2
1cos
2
22
sincos
ωωωζω
φ
ωζωωω
φωωζωωω
ωζωωζωωω
ωω
ωω
−==
+−⋅=+=
−=+−
⋅=
+−
−⋅=
+=
n
n
nn
nn
n
nn
n
AA
mFAAA
tAx
mFA
mFA
tAtAx
一般解 (基本解+特解) tAtCtCx nn ωωω cossincos 21 +′+′=
( )φωωω
ζζω −+⎟
⎠⎞⎜
⎝⎛ ′+′=
<
− tAtCtCex ddtn cossincos
1
21