複数ロボットの情報統合による高度知能化と 移動不 …1...
TRANSCRIPT

1
複数ロボットの情報統合による高度知能化と
移動不能車両の救援システムの構築
第26回 研究成果発表会
2019年9月17日
○ 池田 英俊(研究代表者 富山高専),佐藤 圭祐(富山高専)

2
• 人間が容易に作業ができない汚染区域など(極限作業領域)
⇒ 人間ではなく,ロボットの利用が適している(危険,悪臭 など)
• しかし,極限作業領域が,平坦ではない路面(不整地)であることが多い
⇒ ロボットが移動不能になりがち
• 例えば,福島第一原発の汚染区域内には移動不能となったロボットが残されたままとなっている.
☆ ロボットの不整地移動
⇒ 実は非常に難しい作業!
研究背景

3
ロボットの移動機構
・ ロボットの移動方式はいくつかの種類がある
脚型,車輪型,クローラ型,体幹式(ヘビ型),・・・
⇒ それぞれ,メリット,デメリットがある.
また,それらの融合させたタイプの移動機構の方式も研究されている.
(例えば,脚と車輪をもつ 「脚車輪型」 など)

4
・ 単体での移動能力を向上させる研究は非常に重要なテーマ
とはいうものの,・・・
⇒ - 各移動方式のメリット,デメリットがつきもの- なかなか完璧なものはできない
であるのも事実
従来研究の傾向
従来の不整地移動ロボットの研究:
「ロボット単体での移動能力向上を目的としたもの」がほとんど
「不整地移動時には当然,走行不能になることがある」 という前
提で,そうなった場合に対処するシステムを構築する必要があるのでは?
提案:
5
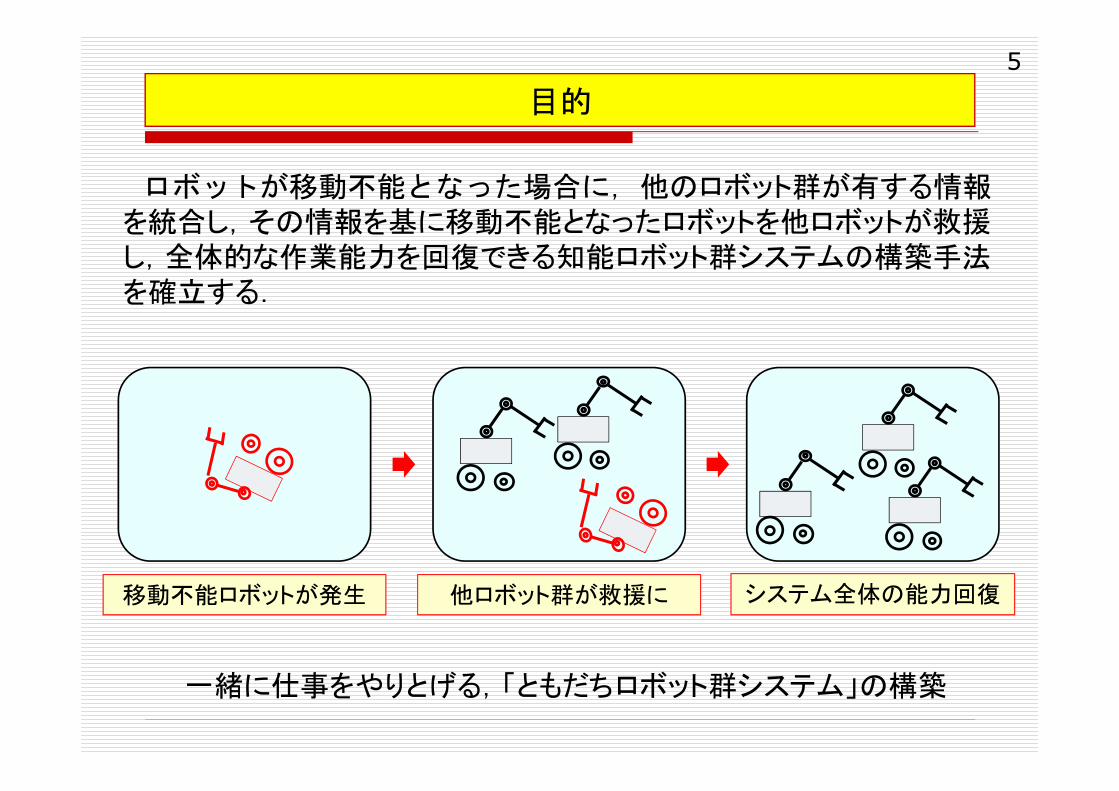
目的
ロボットが移動不能となった場合に,他のロボット群が有する情報を統合し,その情報を基に移動不能となったロボットを他ロボットが救援し,全体的な作業能力を回復できる知能ロボット群システムの構築手法を確立する.
一緒に仕事をやりとげる,「ともだちロボット群システム」の構築
移動不能ロボットが発生 他ロボット群が救援に システム全体の能力回復

6
予想される難しい点 (1)
車両が移動不能になる状況と原因
• スタック (路面の状況による駆動輪の滑り,
ロボットの制御システムの不具合 など)
• 転倒 (障害物乗り上げなど,路面のギャップ など)
⇒ これらの状態からの回復:
他のロボット群による力学的な支援
他ロボット群の救援

7
今回のプロジェクトにおける実現目標
• 転倒した車両の回復支援の実現を目的とする.
• 転倒した車両の回復支援を実現する基礎的なシステムの構築
- ロボットのハードウェアの設計,加工,組み付け
- 制御システムの構築
- 実験による検証

8
ComputerOS:Linux (lubuntu18.04)
[ARToolKit]
CameraLogicool HD Webcam C615
Wheel Mechanisms
Encoder×2
Micro Computer(Arduino Leonardo)
Motor×2
Motor Driver×2
Encoder×3
Micro Computer(Arduino Leonardo)
Motor Driver×2
Touch sensor
Motor×3
Manipulator and hand
- システム構成
ロボットの車体,駆動部分,マニピュレータ(ハンドを含む)
- 水色の部分が車体部分に搭載されている.
全体のシステム構成

9
・前輪がキャスタ,後輪が駆動輪
・左右の車輪は独立で駆動する独立対向2輪駆動方式
・車体上部にはハンド付きマニピュレータを装備
250 [mm]400 [mm]430 [mm]20 [mm]
180 [mm]350 [mm]350 [mm]225 [mm]400 [mm]17.0 [kg]
全高(腕を除く)全長(腕を除く)全幅前輪直径後輪直径前腕部 (L
1)
上腕部 (L2)
ホイールベース(軸距)トレッド幅(タイヤ)質量
L1
L2
移動ロボット

10
・ マニピュレータ: 肩,肘関節の2自由度+ハンド1自由度
マニピュレータ
・ ロボットハンド
- 2指のグリッパーを有する.
- タッチセンサを搭載グリッパー開閉を検知

11
車輪駆動部の構成
• 左右の駆動輪はそれぞれモータを有する
• 独立対向2輪駆動方式(左右の回転比で操舵する)
Encoder
Motor
• ギアボックス上部にサスペンションとショックアブソーバを搭載

12
ComputerOS:Linux (lubuntu18.04)
[ARToolKit]
CameraLogicool HD Webcam C615
Wheel Mechanisms
Encoder×2
Micro Computer(Arduino Leonardo)
Motor×2
Motor Driver×2
Encoder×3
Micro Computer(Arduino Leonardo)
Motor Driver×2
Touch sensor
Motor×3
Manipulator and hand
- PC 搭載
(Intel (R) Core (TM) i3-7100U, 2.40GHz, メモリ:8GB, OS: Linux)
- 画像処理ソフトARtoolKit
- カメラ: USB経由でPC(画角 74°).
Camera
ロボットの車体

13
・ ARToolkitは1999年に誕生し,世界中で最も支持されているAR開発ツール
・ マーカーの位置姿勢をカメラの映像から算出し,AR空間を容易に構築できる計測システムをもつ.
・ 画像から距離情報を数値で表示可能.
・ 近年,ARToolkit をロボットの制御に応用する試みがなされている.
ARToolkit
ARToolkitによる画像処理

14
ARマーカー
・ ARToolkitを利用時に登録する画像 : ARマーカー
→ この画像をカメラで認識
マーカーのルールと特徴
・ 黒枠と白い部分の比率が1:2:1
・ 上下左右対称にならない・ 同じものを使用しないこと
従来のARマーカーの使用例:QRコード状のドットを用いたものが多い
R
1
1
2
1 2 1
ARToolkitによる画像処理

15
ARToolkitによる画像処理
・ ドットで構成されたマーカーを使用してテストを繰り返したが,誤反応が多いという結果が得られた.
�文字(ひらがな,ローマ字 など) のマーカー,大きさなど,いろいろ変更して検討
【結果】
・ 四角で黒色のドットより認識しやすい.
・ 単純形状や,対称形状は誤反応しやすい.
・ 漢字など複雑すぎるものも誤反応しやすい.
・ 表面をラミネート処理したマーカーは光反射で誤動作する.
・ マーカーの大きさは統一する必要がある.
【方針】 これらの条件を満たしたマーカーを使用する.

16
実験
- 開発したロボットにて転倒したロボットの救援を行う.- 転倒したロボットの前面と底面にマーカーを貼付
� 開発したロボットが転倒したロボットのマーカーを認識し,ボディと連結し,転倒から回復させる.
Height 350 [mm]
Length 450 [mm]
Width 240 [mm]
Radius of front wheels 30 [mm]
Radius of rear wheels 75 [mm]
Wheelbase 190 [mm]
Mass 6.5 [kg]
転倒したロボットの諸元

動画
ロボットのカメラの動画
実験

18
まとめ
・ 移動ロボットの設計,開発を行った.
・ ARtoolKitを移動ロボットに実装し,転倒した他車両の回復を実現した.
今後の予定
・ スタックした車両に対する支援手法の確立
・ 様々な転倒,スタック状況に対応できるシステムの構築