electronica y servicio 24
DESCRIPTION
Electronica y Servicio 24TRANSCRIPT





CONTENIDOCiencia y novedades tecnológicas ................ 5
Perfil tecnológicoEl decibelio y el mundo del audio ............. 9Leopoldo Parra Reynada
Leyes, dispositivos y circuitosAnálisis y prueba de semiconductores(Tercera de cuatro partes) .......................... 17Leopoldo Parra Reynada, en colaboración
con Felipe Orozco Cuautle
Proyectos y laboratorioMediciones de voltaje, frecuencia ytiempo con osciloscopio ............................ 27Armando Mata Domínguez
Qué es y cómo funcionaNueva generación de sistemasde componentes de audio ......................... 33Armando Mata Domínguez
Servicio técnicoPuesta a tiempo del mecanismo devideocámaras de 8mm Samsung ................ 44Armando Mata Domínguez y Rafael Gómez Castillo
Códigos de fallas entelevisores Toshiba ..................................... 54Armando Mata Domínguez
Consejos para el servicio aradio-grabadoras portátiles ....................... 59Leopoldo Parra Reynada
Casos de servicio en servomecanismosde videograbadoras .................................... 64Alvaro Vázquez Almazán
Electrónica y computaciónIntroducción general a losmicrocontroladores PIC ............................. 70Leopoldo Parra Reynada
DiagramaDiagrama del televisor Toshiba
www.centrojapones.com
FundadorProfr. Francisco Orozco González
Dirección editorialLic. Felipe Orozco Cuautle([email protected])
Dirección técnicaProfr. J. Luis Orozco Cuautle([email protected])
Subdirección técnicaProfr. Francisco Orozco Cuautle
AdministraciónLic. Javier Orozco Cuautle([email protected])
Relaciones internacionalesIng. Atsuo Kitaura Kato([email protected])
Gerente de distribuciónMa. de los Angeles Orozco Cuautle([email protected])
Gerente de publicidadRafael Morales Molina([email protected])
Gerente de división seminariosProfra. Patricia Rivero Rivero([email protected])
Asesoría editorialIng. Leopoldo Parra Reynada([email protected])
Editores asociadosLic. Eduardo Mondragón MuñozJuana Vega Parra
Colaboradores en este númeroProfr. Armando Mata DomínguezIng. Leopoldo Parra ReynadaAlvaro Vázquez Almazán
Coordinadora de ProyectosLic. Kenia Rubio Gayosso
Diseño gráfico y pre-prensa digitalD.C.G. Norma C. Sandoval Rivero([email protected])D.G.Carolina Camacho CamachoD.G. Ana Gabriela Rodríguez López
Apoyo fotográficoRafael Morales Orozco y Julio Orozco Cuautle
Agencia de ventasCristina Godefroy Trejo
Suscripciones
Isabel Orozco Cuautle ([email protected])
Electrónica y Servicio, Febrero del 2000, Revista Mensual. EditorResponsable: Felipe Orozco Cuautle. Número Certificado de Reser-va de Derechos al Uso Exclusivo de Derechos de Autor 04-1999-041417392100-102. Número de Certificado de Licitud de Título:10717. Número de Certificado de Licitud en Contenido: 8676. Domi-cilio de la Publicación: Norte 2 #4, Col. Hogares Mexicanos, 55040,Ecatepec, Estado de México. Impresión: Impresos PublicitariosMogue/José Luis Guerra Solís, Vía Morelos 337, Col. Santa Clara,55080, Ecatepec, Estado de México. Distribución: DistribuidoraIntermex, S.A. de C.V. Lucio Blanco 435, Col. San Juan Ixhuaca,02400, México, D.F. y Centro Japonés de Información Electrónica,S.A. de C.V. Norte 2 # 4, col. Hogares Mexicanos, 55040, Ecatepec,Estado de México.Suscripción anual $480.00 ($40.00 ejemplares atrasados)para toda la República Mexicana, por correo de segunda clase(80.00 Dlls. para el extranjero).Todas las marcas y nombres registrados que se citan en los artí-culos, son propiedad de sus respectivas compañías.Estrictamente prohibida la reproducción total o parcial por cual-quier medio, sea mecánico o electrónico.El contenido técnico es responsabilidad de los autores.
No.24, Marzo 2000


5ELECTRONICA y servicio No.24
CIENCIA Y NOVEDADES
TECNOLOGICAS
CIENCIA Y NOVEDADES
TECNOLOGICAS
CIENCIA Y NOVEDADES
TECNOLOGICAS
CIENCIA Y NOVEDADES
TECNOLOGICAS
Nunca vuelva a perderse dentrode la ciudad
La última moda en Japón es un aparato diseña-do y producido por diversas compañías (entre
ellas, Kenwood, Sony y Panasonic), que, por unlado, combina un procesador GPS y el softwarede un mapa (figura 1).
El procesador GPS (siglas en inglés de Siste-ma de Posicionamiento Global), es un aparato
Figura 1

6 ELECTRONICA y servicio No.24
que, aprovechando las señales que envían unaserie de satélites hacia la Tierra, puede calcularla posición en que se encuentra dicho aparato (ypor consiguiente el usuario) con un margen deerror de algunos metros. En tanto, el softwarecartográfico corresponde a un mapa detalladode una ciudad, región o país (incluso en tres di-mensiones, indicando la posición de los edifi-cios y construcciones más representativas); sinembargo, este mapa no es fijo, sino interactivo,y viene almacenado en un DVD.
Cuando ambos elementos trabajan juntos, secrea una verdadera maravilla: un sistema que elusuario puede llevar en su automóvil, y que cuen-ta con una pequeña pantalla LCD en la que sepuede marcar el sitio en que se encuentra en esemomento y al que desea ir; y de acuerdo con losdatos almacenados en el DVD, el sistema le in-dica la ruta más corta, la más adecuada o la quepresente menos tráfico. Y puesto que algunosde estos sistemas están enlazados a las oficinasde tránsito locales, puede disponerse de infor-mación sobre –por ejemplo– congestionamientoso vías despejadas.
Si el usuario no es muy hábil para interpretarmapas, no tiene que preocuparse, pues algunosde estos aparatos son capaces de indicarle pasopor paso la secuencia que debe seguir para lle-gar a su destino, señalando en qué esquina debedar vuelta a la derecha o izquierda, qué desvia-ción tomar, el sentido de las calles que vaya en-contrando, etc.; y si esto le parece un poco com-plicado, algunos modelos pueden mostrar enpantalla una vista tridimensional de la zona queesté atravesando, con los edificios claramentemarcados y con una representación de su autoconforme avanza por las calles, mostrando acada momento la dirección que debe tomar parallegar a su destino.
Todo esto de por sí resulta casi increíble; perosi lo combinamos con la posibilidad de dar ór-denes por medio de una pantalla sensible al tac-to o por control remoto, o de configurar el siste-ma para que una voz vaya guiando al usuariopor su camino, veremos que con este sistemaresulta prácticamente imposible perderse den-tro de la ciudad o región por la que se transita.
Si alguno de nuestros lectores ha visitado Ja-pón, sabrá que transitar dentro de la ciudad deTokio (con 28 millones de habitantes) o haciaciudades periféricas, es muy complicado, tantopor el nivel de congestionamiento como por lamisma magnitud de esta urbe, y sobre todo cuan-do no se habla japonés. ¿Será que en la Ciudadde México pronto necesitemos este sistema com-binado de GPS con un software cartográfico?
Para digitalizar documentos dondequiera y cuando quiera
Los enormes avances en la tecnología elec-trónica han permitido miniaturizar a niveles in-creíbles elementos que anteriormente parecíancondenados a ser siempre voluminosos y pesa-dos; este es el caso de los receptores de radio,los televisores, las computadoras, etc.
Precisamente, refiriéndonos a las computa-doras portátiles, uno de los grandes problemasque enfrentaba el usuario de este tipo de siste-mas era la poca disponibilidad de accesorios quetambién fueran portátiles; y es que de poco onada servía una computadora muy pequeña oliviana, si había que llevar con nosotros una im-presora convencional o un escáner de tamañocompleto. Afortunadamente, diversos fabrican-tes solucionaron este problema, al diseñar algu-nos escáners de dimensiones reducidas; sin em-bargo, estos aparatos tenían un problemafundamental.
Dado que los escáners miniatura que se ha-bían producido hasta la fecha eran de tipo derodillos, sólo podían escanear hojas sueltas (lahoja entraba por una ranura, pasaba por los ele-mentos de rastreo y salía por otra ranura); asíque no era posible digitalizar, por ejemplo, la hojade un libro sin desprenderla de éste, con todoslos inconvenientes que ello implicaba. Pero yaexiste una solución para este problema: Fujitsuacaba de lanzar al mercado un escáner miniatu-ra (que parece una barra de plástico del tamañode un abanico cerrado), mismo que al pasar so-bre las hojas rastrea la información y la convier-te en formato de computadora; de modo queahora podemos llevar junto a nuestra Notebook

7ELECTRONICA y servicio No.24
un escáner extremadamente portátil, que cubrelas necesidades que antes precisaban de unrastreador de cama plana (figura 2).
No obstante, a causa de su reducido tamañoy su aplicación específica, por el momento esteaparato sólo puede manejar información enblanco y negro y ofrece apenas una resoluciónmáxima de 400 dpi (muy poco para losestándares actuales); sin embargo, no dude quesi este modelo tiene éxito, pronto apareceránversiones de mayor resolución y capaces demanejar colores, lo que llevará a esta maravillade la miniaturización a los mismos niveles quesus “primos” de cama plana.
Fotografía digital sin computadora
Desde que comenzaron a aparecer las primerascámaras fotográficas digitales, mucha gente pre-dijo que los días de las cámaras tradicionalesestaban contados; que bastaría que estas cáma-ras digitales bajaran de precio y tuvieran unmanejo lo suficientemente sencillo, para que losusuarios se volcaran en masa a este nuevoestándar y las cámaras convencionales pasarana la historia (como sucedió con los discos deacetato). Pero estas predicciones no se han cum-
Figura 2

8 ELECTRONICA y servicio No.24
plido por diversas razones, algunas de las cua-les consisten en que:
• Las cámaras digitales no se han podido abara-tar lo suficiente como para estar al alcance decualquier persona; y aunque su manejo se hasimplificado, las cámaras tradicionales tambiénson ahora más sencillas de utilizar.
• La calidad de imagen que proporciona una cá-mara digital aún deja mucho que desear si lacomparamos con la que se obtiene con pelícu-la tradicional.
• Prácticamente todos los sistemas de fotografíadigital están diseñados para que las fotos sevisualicen en una computadora; pero, como sa-bemos, no todas las personas posee una má-quina de este tipo.
Aunque las primeras limitantes se pueden ir so-lucionando según avance la tecnología, el últi-mo factor implica en verdad un grave escollo:todavía hay muchas personas que le tienen pa-vor a las computadoras. Para solucionar en ciertamedida este problema, Sony acaba de lanzar al
Figura 3
mercado un aparato que complementa a su sis-tema Mavica y que permite ver las fotografíasdigitales en la pantalla del televisor (más la op-ción de imprimir una copia en papel, para poderllevar la foto favorita a todas partes y obtener elnúmero de copias que se desee).
Como seguramente ya sabe, uno de los as-pectos que identifican al sistema Mavica es sucapacidad de guardar las fotografías digitales endisquete, de modo que sea relativamente fácilllevarlas a cualquier sistema de cómputo. Estapropiedad se aprovecha en el Mavica Printer FVP-1, el cual posee una ranura por donde se intro-duce el disquete y otra por donde sale la foto-grafía impresa; para poder elegir la foto que va aimprimirse, la FVP-1 se conecta a cualquier te-levisor; y una vez seleccionada la foto, simple-mente se le indica que la imprima (figura 3).
Con avances de esta clase, es probable quelas cámaras digitales comiencen a ganar másadeptos; aunque todavía les queda por recorrerun buen trecho, para desplazar por completo alsistema fotográfico convencional. Mas no duda-mos que se avecinan cambios.

9ELECTRONICA y servicio No.24
Introducción
No sé –empezó a decir Harry Purvis– si alguna vezse ha detenido a pensar en la naturaleza del soni-do. Es suficiente con decir que consiste en variasseries de ondas que se mueven a través del aire.
Arthur C. ClarkeCuentos de la Taberna del Ciervo Blanco
Sin duda alguna, el sonido fue uno de los prime-ros fenómenos que el ser humano estudió concierto detalle, debido principalmente a una delas primeras manifestaciones culturales: la mú-sica (figura 1).
Fueron los griegos quienes comenzaron elestudio sistemático de los fenómenos acústicos.Son muy conocidos los descubrimientos que rea-lizó Pitágoras, el geómetra que demostró que sise tenía una cuerda tensada de una longitud L,al momento en que –sin variar el grado de ten-
EL DECIBELIO Y
EL MUNDO DEL
AUDIO
EL DECIBELIO Y
EL MUNDO DEL
AUDIO
Leopoldo Parra Reynada
En esta ocasión revisaremos diversosconceptos básicos del mundo del
audio, tomando como merareferencia el decibelio, un parámetro
que nos resulta muy familiar; comoya es costumbre en esta sección,
haremos un breve recuento históricode cómo el hombre se ha explicado
los fenómenos sonoros a lo largo delos siglos, desde los griegos hasta el
advenimiento del método científico yel registro electrónico del sonido.
Esperamos de esta forma ir sentandobases para futuros artículos en los
que entraremos más a fondo enmateria.

10 ELECTRONICA y servicio No.24
sión– la longitud se reducía a la mitad se obte-nía el mismo tono, pero una octava más alto (fi-gura 2). También fueron los griegos quienes des-cubrieron que el sonido producido por unatrompeta de una cierta longitud, era exactamenteigual si el tubo era completamente recto o esta-ba doblado varias veces; además, perfecciona-ron instrumentos como la lira y el caramillo (oflauta de Pan, como también se le conoce); in-cluso, existen evidencias de que desarrollaronlos primeros órganos de tubos.
No obstante, la naturaleza física del sonidoseguía escapando de su comprensión; se espe-culó que el sonido era transportado por un espí-ritu; que eran minúsculas partículas que viaja-ban en el aire; que era algo inherente de toda la
materia; sólo Aristóteles llegó a postular una teo-ría del fenómeno de transmisión sonora que seacercaba mucho a la realidad.
No se sabe de grandes avances en el conoci-miento de los fenómenos acústicos durante laEdad Media; mas sin duda alguna, los instrumen-tos musicales fueron evolucionando de maneraempírica, y así lo demuestra el surgimiento deinstrumentos capaces de producir deliciosos so-nidos, como el laúd, los antecesores del violín,las flautas y otros instrumentos de viento, lasanfona, las gaitas y el máximo exponente de latecnología del medievo: el órgano (figura 3).
Es también en estos años cuando se comien-za a diseñar una notación musical, de modo queuna cierta melodía pudiera ser preservada deforma escrita, y no tuviera que transmitirse for-zosamente de juglar en juglar o de ejecutanteen ejecutante.
Primeras investigaciones científicasdel sonido
Al parecer, fue Galileo el primero en estudiar losfenómenos sonoros con una metodología ade-cuada; alrededor del año 1600, elaboró una se-rie de experimentos que le permitieron compren-
Representación demujeres griegas tocandoinstrumentos musicales,en una ánfora de hacia440 años AC. Note alcentro a la mujer que tocauna lira, antecedente delarpa.
Figura 1
L
Pitágoras descubrió que si se pulsaba una cuerda tensada,se producía una cierta nota musical. Al reducir la longitud de la cuerda a la mitad, se producía la misma nota, pero una octava más arriba.
1/2 L
Figura 2
Instrumentosmusicales delmedievo
Figura 3
11ELECTRONICA y servicio No.24
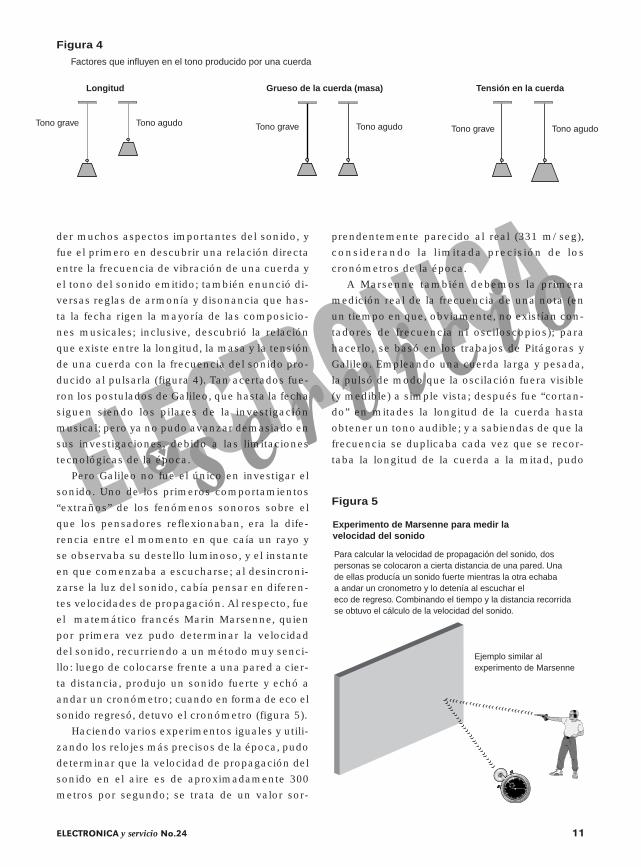
der muchos aspectos importantes del sonido, yfue el primero en descubrir una relación directaentre la frecuencia de vibración de una cuerda yel tono del sonido emitido; también enunció di-versas reglas de armonía y disonancia que has-ta la fecha rigen la mayoría de las composicio-nes musicales; inclusive, descubrió la relaciónque existe entre la longitud, la masa y la tensiónde una cuerda con la frecuencia del sonido pro-ducido al pulsarla (figura 4). Tan acertados fue-ron los postulados de Galileo, que hasta la fechasiguen siendo los pilares de la investigaciónmusical; pero ya no pudo avanzar demasiado ensus investigaciones, debido a las limitacionestecnológicas de la época.
Pero Galileo no fue el único en investigar elsonido. Uno de los primeros comportamientos“extraños” de los fenómenos sonoros sobre elque los pensadores reflexionaban, era la dife-rencia entre el momento en que caía un rayo yse observaba su destello luminoso, y el instanteen que comenzaba a escucharse; al desincroni-zarse la luz del sonido, cabía pensar en diferen-tes velocidades de propagación. Al respecto, fueel matemático francés Marin Marsenne, quienpor primera vez pudo determinar la velocidaddel sonido, recurriendo a un método muy senci-llo: luego de colocarse frente a una pared a cier-ta distancia, produjo un sonido fuerte y echó aandar un cronómetro; cuando en forma de eco elsonido regresó, detuvo el cronómetro (figura 5).
Haciendo varios experimentos iguales y utili-zando los relojes más precisos de la época, pudodeterminar que la velocidad de propagación delsonido en el aire es de aproximadamente 300metros por segundo; se trata de un valor sor-
prendentemente parecido al real (331 m/seg),considerando la limitada precisión de loscronómetros de la época.
A Marsenne también debemos la primeramedición real de la frecuencia de una nota (enun tiempo en que, obviamente, no existían con-tadores de frecuencia ni osciloscopios); parahacerlo, se basó en los trabajos de Pitágoras yGalileo. Empleando una cuerda larga y pesada,la pulsó de modo que la oscilación fuera visible(y medible) a simple vista; después fue “cortan-do” en mitades la longitud de la cuerda hastaobtener un tono audible; y a sabiendas de que lafrecuencia se duplicaba cada vez que se recor-taba la longitud de la cuerda a la mitad, pudo
Tono grave
Factores que influyen en el tono producido por una cuerda
Tono agudo
Longitud
Tono grave Tono agudo
Grueso de la cuerda (masa)
Tono grave Tono agudo
Tensión en la cuerda
Figura 4
Para calcular la velocidad de propagación del sonido, dospersonas se colocaron a cierta distancia de una pared. Unade ellas producía un sonido fuerte mientras la otra echabaa andar un cronometro y lo detenía al escuchar el eco de regreso. Combinando el tiempo y la distancia recorrida se obtuvo el cálculo de la velocidad del sonido.
Experimento de Marsenne para medir lavelocidad del sonido
Ejemplo similar alexperimento de Marsenne
Figura 5

12 ELECTRONICA y servicio No.24
determinar de forma bastante precisa la frecuen-cia que correspondía a cierto tono de sonido,para de ahí deducir teóricamente el comporta-miento de cuerdas más cortas y ligeras.
En 1660 se dio un paso muy importante en lacomprensión del comportamiento del sonido: elcientífico inglés Robert Boyle descubrió que elsonido no podía propagarse en el vacío, y paraprobarlo diseñó un experimento muy sencillo:introdujo una campana a una ampolla al vacío,y al agitar el conjunto observó que no se escu-chaba ni el más ligero sonido a pesar que el ba-dajo golpeaba a la campana; cuando dejó que elaire entrara a la ampolla, el sonido se hizo per-ceptible (figura 6).
Boyle también comprobó que el sonido nosólo se esparce por el aire, sino que también setransmite por líquidos y sólidos, como el agua ylos metales; pero es mérito de Isaac Newton des-cubrir que la velocidad de propagación del soni-do en los distintos medios depende de forma di-recta de las propiedades físicas de cada uno deellos (viscosidad, densidad de partículas, elasti-cidad, temperatura, etc.)
El siguiente impulso a las investigaciones re-lacionadas con el sonido vino de una fuente in-sospechada hasta entonces: las matemáticas.
Con el desarrollo de los métodos de cálculo di-ferencial e integral, y sobre todo con la aporta-ción de Joseph Fourier, en cuanto al hecho derepresentar una onda compleja en virtud demúltiples ondas sencillas, por fin se pudo deter-minar en gran medida la naturaleza de las on-das sonoras. Entre otras cosas, por fin se aclaróla razón de que se produjeran sonidos diferen-tes (característica denominada “timbre”) cuan-do una misma nota –y por consiguiente unamisma frecuencia– era tocada en dos instrumen-tos distintos, digamos una flauta y un violín: lacantidad y amplitud de armónicas (frecuenciasmúltiplos de la original), que van “montadas”sobre la frecuencia base, es decir, la que deter-mina el “tono” (figura 7).
En el siglo XVIII se hicieron interesantes des-cubrimientos sobre el sonido; por ejemplo, quesu velocidad de propagación no tiene que vercon la frecuencia, sino única y exclusivamentecon las propiedades mecánicas del medio de pro-pagación. También se elaboraron patrones so-noros que sirvieron para “estandarizar” la músi-ca en todo el mundo; por ejemplo, se fijó en 440Hz la frecuencia de LA central del piano, que esel tono base de afinación de todos los instru-mentos de una orquesta en nuestros días. Perohubo que esperar hasta bien entrado el siglo XIX,para que la investigación sonora tuviera un im-pulso sin precedentes, determinado por la apa-
Orificio
Tapón
Aunque se podía ver que la campana era golpeada por el badajo, no se escuchaba ningún sonido
Al dejar entrar aire,el sonido se escuchaba
sin ningún problema
Ampolla al vacío
Experimento de Boyle con el que demostró que elsonido necesita un medio de propagación.
Figura 6
Figura 7
Aunque se toqueexactamente la misma notaen instrumentos distintos,el sonido que producenvaría debido a susdiferencias en armónicas.

13ELECTRONICA y servicio No.24
rición de algunos elementos nuevos: el micrófo-no y la máquina de corriente variable de Braun.
Primeras investigacioneselectrónicas del sonido
Como seguramente sabe, el objetivo de un mi-crófono es convertir una onda sonora que sepropaga por el aire en una señal eléctrica querefleje lo más fielmente posible el comportamien-to del sonido original.
Una vez que los físicos dispusieron de unaseñal eléctrica correspondiente a un patrón so-noro, utilizando el aparato de corriente variable(el antecesor del osciloscopio moderno), pudie-ron comprobar lo siguiente: que la frecuencia deuna señal está directamente ligada con el tonodel sonido que se recibe; que la forma de ondase relaciona con el timbre; y, por último, que laamplitud de la señal determina la intensidad delsonido recibido.
Se pudo entonces comenzar un estudio pro-fundo sobre la naturaleza de las ondas sonoras,su comportamiento en distintos medios, la for-ma de almacenarlas, etc. Al mismo tiempo, secomprobaron algunos fenómenos aparentemen-te extraños del sonido y la manera en que el ser
humano los percibe. Por ejemplo, se descubrióque la curva de respuesta del oído al sonido noes lineal, sino que se comporta de formalogarítmica; o sea, para que el oído humano apre-cie un incremento del doble en la potencia delaudio (lo que significa que para un espectadorpromedio un cierto sonido suena “el doble de fuer-te” que otro), hay que aumentar la propia poten-cia alimentada en un cierto factor exponencial;y precisamente, de estos experimentos surge unaescala que hasta la fecha se sigue empleandopara la medición de la potencia del sonido: laescala de los decibelios (figura 8).
Qué es el decibelio
El decibelio es la unidad con la que tradicional-mente se mide la intensidad del sonido; se basaen una escala logarítmica, según la cual se asig-na arbitrariamente el valor de 0dB al sonido mástenue promedio que puede escuchar una perso-na, para de ahí aumentar 3dB en la propia esca-la, cada vez que el escucha siente que la inten-sidad de un sonido determinado se ha duplicado.Obviamente, es una escala subjetiva.
Estrictamente hablando, el sistema interna-cional de medidas posee otro parámetro para
Figura 8
En esta imagen se observa al público asistente a la demostración de los primeros fonógrafos. El sistema del fonógrafo consistía enun tubo o un disco en el que se grababa físicamente el audio; la lectura se realizaba mediante una aguja que recorría el surco, ymediante tubos auditivos se expedía o amplificaba el sonido. Entonces los investigadores comenzaron a interesarse más en medircientíficamente los diferentes parámetros asociados a los sonidos.Adjunto a la imagen principal, se muestran unos cilindros y a Edison escuchando música en un fonógrafo.

14 ELECTRONICA y servicio No.24
medir la intensidad de sonido (se mide por lapotencia recibida por unidad de área); pero de-bido a la popularidad de la escala de decibelios,ésta se sigue empleando en la mayoría de lasaplicaciones que involucren mediciones de in-tensidad sonora.
En realidad, es un tanto complejo explicardetalladamente qué es lo que se mide para de-terminar el valor que en decibelios tiene ciertosonido, dado que –como ya se dijo– se trata deuna escala subjetiva. Sin embargo, se han crea-do tablas patrón que permiten apreciar rápida-
mente el valor aproximado en decibelios de uncierto sonido. Vea la tabla 1 como referencia.
Para obtener estas tablas, los científicos tra-bajaron con muchos voluntarios, a quienes ex-pusieron a diversos sonidos de distinta intensi-dad, preguntándoles constantemente suapreciación respecto a “qué tan fuerte les pare-cía este sonido en comparación con el anterior”;con el promedio de los resultados obtenidos seelaboraron tablas y gráficos que muestran la res-puesta del oído humano típico ante los fenóme-nos sonoros.
En forma simplificada, podemos decir que laescala de decibelios se creó tomando como re-ferencia un sonido de cierta intensidad, al cualarbitrariamente se le asignó el valor de 0 dB. Apartir de este punto, los sonidos más débiles seexpresan con valores negativos (por ejemplo, -6
dB) y los sonidos más fuertes toman valores po-sitivos. También se asignó una escala de 3 dB acada duplicación de la potencia audible del so-nido, tomando como referencia la sensación delescucha promedio; esto quiere decir que para unespectador un sonido de 0 dB se escucha muysuave, uno de 3 dB se escucha doblemente fuer-te, uno de 6 dB se escucha cuatro veces más fuer-te, y así sucesivamente.
Hay que aclarar que se tomó como umbral de0 dB el sonido más débil que un escucha prome-dio puede percibir; y si consideramos que el so-nido más intenso que puede escuchar una per-sona sin sufrir daño físico irremediable es deaproximadamente 120 dB (considerando la es-cala logarítmica de los decibelios), tenemos queel oído humano puede captar sonidos cuya dife-rencia de intensidad está en el rango de 1 billónde veces; o sea, el sonido más fuerte que puedetolerar una persona es un billón de veces másfuerte que el más débil que pueda captar. Quizáesto explique el porqué es mucho más fácil en-gañar al ojo humano que al oído; por ejemplo,recuerde que el sonido en un CD se digitalizacon una precisión de 16 bits, mientras que lamayoría de los procesos de video lo hacen a unmáximo de 12 bits.
Pero todo este rango audible es bastante sub-jetivo, pues es casi seguro que ninguna personaescuche exactamente igual que otra; incluso, conla edad, una persona puede ir sufriendo una gra-dual pérdida de la capacidad auditiva; y este pro-ceso puede acelerarse a causa de ciertos abusoso hábitos, como el uso excesivo y a todo volu-men de los audífono. Inclusive, el ruido y la con-taminación sonora de las grandes ciudades sonmuy perjudiciales para este sentido.
Existe una analogía que ilustra muy bien elcomportamiento normal del oído humano: su-pongamos que las células receptoras del sonidoson algo así como el pasto de un campo; mien-tras que por encima de él haya un tráfico nor-mal de personas, animales y objetos (que le désuficiente tiempo para regenerarse ante la even-tualidad de ser pisado por algo de mucho peso),siempre retoñará y permanecerá verde y firme;pero si sobre él pasamos una y otra vez con ob-jetos pesados, sin darle tiempo de recuperación,
odinosedolpmejEdadisnetnI)2m/sttaw(
soilebiceD
rolodledlarbmU 1 021
otercnocedordalaT 10,0 001
rT á )acreced(onabruocif 10000,0 07
icasrevnoC ó oidemorpn 100000,0 06
ollumruM 01-E1 02
sajohsalertneeriA 11-E1 01
elbidualarbmU 21-E00,1 0
Tabla 1

15ELECTRONICA y servicio No.24
al cabo de muy poco tiempo se secará por com-pleto. Lo mismo sucede cuando exponemos lascélulas internas del oído humano a sonidos dealta intensidad.
¿Por qué se dice todo esto? Precisamente por-que la intensidad del sonido es un factor de me-dición muy subjetivo, que depende por enterode la sensación del escucha. Este comportamien-to no sólo tiene que ver con la edad o con elabuso que haya sufrido el oído; se ha demostra-do que las personas escuchan con más facilidadcierta banda de frecuencias que otras; así, sepuede escuchar un sonido muy débil en la ban-da comprendida entre 1 y 5 KHz, mientras quese necesita un sonido de considerable intensi-dad para captar las frecuencias límite (cercanas
a 20 ó a 20,000 KHz). En la figura 9, vea unacurva de respuesta en frecuencia del oído típico.
Qué es el sonido
Tras haber descrito una serie de investigacionesacerca del sonido y las formas que se han idea-do para medir sus diversos parámetros, cabepreguntarse: ¿qué es el sonido? Una analogíamuy adecuada, sería comparar el sonido con loque ocurre cuando dejamos caer un objeto en
una superficie de agua en calma: puede ver queal momento del contacto comienzan a surgirdesde dicho punto una serie de ondasconcéntricas que se van alejando paulatinamen-te, disminuyendo su fuerza hasta diluirse con ladistancia (figura 10).
Esta misma situación, pero en tres dimensio-nes, sucede con el sonido; mas hay una salve-dad: mientras que en las ondas que aparecen enel agua el movimiento es transversal con res-pecto a la dirección de propagación de la onda(si en la trayectoria de las ondas ponemos unobjeto que flote, veremos que éste sólo sube ybaja, pero no es impulsado hacia donde se alejadicha onda), con el sonido sucede exactamentelo contrario.
El sonido es una sucesión de ondas formadaspor partículas que se mueven hacia delante yhacia atrás en la misma dirección en que se pro-paga la onda sonora, creando zonas concéntri-cas en las cuales la densidad del medio es másalta y más baja de forma alternada (el nombrecientífico es “compresiones y rarefacciones su-cesivas”, figura 11). Esto explica la razón de queel sonido no se propague en el vacío: forzosa-mente necesita de un medio físico (partículas enmovimiento) para viajar de un punto a otro;igualmente, así sabemos por qué el sonido viajacon mayor rapidez en el agua y en los metales:entre más denso sea un medio, más cercanasentre sí estarán las partículas que lo forman y elmovimiento oscilante se transmitirá de una aotra con más facilidad.
120
110
100
90
80
70
60
50
40
30
20
10
0
120
110
100
90
80
70
60
50
40
30
20
10
0
20 100 500 1000 5000Frecuencias (Hz)
10000-10
-10
Inte
nsid
ades
(dB
)
Umbral del dolor
Umbral de la audibilidad
Curva típica de respuesta del oído humano.Note cómo varía el umbral audible según la frecuencia.
Figura 9
Objeto
Objeto
Ondas concéntricas
Recipiente con agua
Figura 10

16 ELECTRONICA y servicio No.24
Esta situación puede crear fenómenos curio-sos: al ver películas o series de TV donde pilotosde aviones de guerra pelean entre sí, probable-mente se habrá preguntado porqué se escuchael sonido de los motores en la cabina si supues-tamente estos aparatos viajan a mayor veloci-dad que el sonido (lo que podría hacernos pen-sar que el ruido queda detrás del avión y que elpiloto, entonces, debería viajar completamenteen silencio); la realidad es que aun y cuando elavión puede estar desplazándose más rápida-mente que el sonido en el aire, éste también viajaa través de las paredes metálicas del aparato(mucho más rápido que en el aire) y así llegahasta al piloto.
También nos demuestra la falacia en la queincurren las películas de ciencia–ficción al pre-sentarnos espectaculares explosiones en el es-pacio, acompañadas por enormes estallidos so-noros; en el espacio interplanetario sólo hayvacío, y el sonido no se puede propagar en di-cho medio, así que estrictamente hablando, lasexplosiones tendrían que ser silenciosas.
Como ha podido apreciar, el interés por losfenómenos sonoros ha sido una constante des-de el hombre primitivo, lo es en está época delas supercomputadoras, y así será mientras noperdamos el sentido del oído (... sí, «oyó» ustedbien).
MANUALES DESERVICIO SAMSUNG
EN CD-ROM
Compresiones (mayor densidad)
Rarefacciones(menor densidad)
Figura 11
Tres CDROM con manuales de serviciode equipos Samsung (audio televisiónvideograbadoras videocámaras DVD
monitores de PC fax e impresoras láser)
El usuario puede consultar e imprimirdiagramas electrónicos listados y númerosde partes secciones de ajustes etc de unamanera muy ágil pues el formato utilizado
cuenta con mecanismos de búsqueda enmodo texto
ELECTRONICS
Producidos por:
PIDA INFORMES:Centro Japonés de Información Electrónica
Tels. 57•87•17•79 y 57•70•48•84www.centrojapones.com

17ELECTRONICA y servicio No.24
(Tercera de cuatro partes)(Tercera de cuatro partes)
Leopoldo Parra Reynada, encolaboración con Felipe Orozco
ANALISIS Y PRUEBA DE
SEMICONDUCTORES
ANALISIS Y PRUEBA DE
SEMICONDUCTORES
En esta tercera parte del artículo,hablaremos de la construcción,
principio de operación yprocedimientos de prueba de los
transistores bipolares y de los FET.Además, como parte práctica,
terminaremos de construir la fuentede poder de 5 voltios a 1 ampere que
iniciamos en los artículosprecedentes de esta serie. Dicha
fuente le servirá para algunasprácticas que se sugieren en este
material.
El transistorDesarrollado a finales de los años 40 en los la-boratorios de la "Bell Telephone" por JohnBardeen, William Shockley y Walter Brattain(descubrimiento que les valió el Premio Nobelde Física), el transistor vino a reemplazar a lasválvulas tríodo como los dispositivos fundamen-tales de la tecnología electrónica para la ampli-ficación de señales eléctricas (figura 1).
El transistor es un dispositivo semiconductorcuya principal función consiste en amplificar se-ñales; o sea, es capaz de entregar en su salida lamisma señal de entrada pero con mayor ampli-tud o potencia, fenómeno que puede ser apro-vechado en múltiples aplicaciones electrónicas.Como tal, el transistor se basa en los mismosprincipios de operación de los elementos semi-conductores; es decir, se fundamenta en el pe-culiar comportamiento manifestado por la uniónde dos materiales semiconductores tipo P y N,respectivamente, y en el efecto de avalanchaaplicado en la construcción de un diodo zener.

18 ELECTRONICA y servicio No.24
El transistor bipolar de juntura
En la figura 2 se muestra el diagrama simplifica-do de la construcción de un transistor típico. Ob-serve que no son más que tres capas de mate-rial semiconductor: dos de material tipo N (unamás gruesa que otra) y una muy delgada de ma-terial tipo P. Esta configuración tan especial re-sulta indispensable para el funcionamiento deldispositivo, según explicaremos a continuación.
La operación del transistor se basa en los fe-nómenos de la conducción de unión PN cuandoes polarizada en directa, y en el principio de ava-lancha aprovechado en los diodos zener. Supon-gamos que a un transistor típico se le conectan
sendas fuentes de voltaje como las que se mues-tran en la figura 3; advierta que se ha colocadoun voltaje positivo entre la capa P intermedia yla capa N inferior, así como otra fuente de volta-je positivo entre la capa N superior y la capa Ninferior.
Si pudiera observarse el interior del dispositi-vo para analizar el comportamiento de los elec-trones y de las cargas positivas, veríamos que,debido al voltaje positivo entre la capa P inter-media y la N inferior, en esta unión se produceun flujo de corriente (podemos ver esta unión
Mat. N
Mat. P
Mat. N
I1
I2
--
--
-
- -
-
--
-
-
-
+
-
+
-
+
Transistor tipo NPNColector
Base
Emisor
Figura 1
Figura 2
Figura 3
Figura 4
El transistor es un componente activo formado por doso más uniones. En la fotografía se muestra el aspectoexterno e interno de un transistor de potencia.
Base
Colector
Emisor

19ELECTRONICA y servicio No.24
PN como un diodo conectado a una fuente endirecta); mas a causa de que el voltaje aplicadoa dicha unión es muy pequeño, la corriente quecircula también es reducida; sin embargo, estatensión es suficiente para excitar a los electro-nes de la capa N superior; y dado que entre am-bas capas N efectivamente existe un voltaje re-lativamente alto, se produce el efecto deavalancha, el cual a su vez es "controlado" porla corriente que circula en la capa P intermedia.
En otras palabras, cuando se alimenta a untransistor en la forma indicada en la figura 3,entre sus terminales N superior e inferior circulauna corriente que, en una proporción que de-pende de la construcción interna del dispositi-vo, resulta de mayor magnitud que la que circu-la por la capa P intermedia. A esta ganancia decorriente se le han dado las siglas de Hfe o B(beta).
Como puede apreciar, el transistor es un dis-positivo de tres terminales, las cuales reciben elnombre de "colector" (capa N superior), "base"(capa P intermedia) y "emisor" (capa N inferior).Su símbolo y encapsulados más comunes semuestran en la figura 4.
¿Para qué sirve un dispositivo con estas ca-racterísticas? La respuesta es muy fácil: un tran-sistor puede servir como amplificador simple,fuente de corriente constante o interruptor sen-cillo. Veamos sus aplicaciones.
El transistor como amplificador
Ya señalamos que una de las aplicaciones máscomunes del transistor es como amplificador;esto se debe justamente a su propiedad de mul-tiplicar por un factor B la corriente que circulapor su base, logrando así una corriente muchomayor entre el colector y el emisor; o sea, cuan-do a un transistor correctamente polarizado sele aplica una corriente muy pequeña en su base,esta misma corriente aparece en su colector perode manera amplificada; de esta manera, en losucesivo se puede dar en el circuito un manejodeterminado a ese voltaje o señal.
Si, por ejemplo, tenemos un micrófono y de-seamos amplificar la señal obtenida, esto es po-sible con sólo conectar las terminales del
transductor a una configuración como la que semuestra en la figura 5; observe que no se inclu-ye mas que un transistor auxiliado por algunasresistencias y condensadores, que el micrófonose encuentra conectado a la base a través de uncondensador y que una bocina está conectadaal colector a través de otro condensador.
En condiciones estáticas (sin señal de entra-da), ni el micrófono ni la bocina trabajan en ab-soluto; así que el circuito se simplifica en la for-ma que vemos en la figura 6; puede advertir queel voltaje de alimentación se conecta al colectordel transistor a través de una resistencia, a laque llamaremos "Rc". Por su parte, esa mismatensión de alimentación llega hasta la base deltransistor, pero a través del reductor de voltajeformado por R1 y R2 (con lo que se logra una po-larización como la indicada en la misma figura 6).
En esta situación, por la base del transistorcircula una corriente pequeña; a su vez esto in-
Mic.
CB
R1
R2RE
RC CC
CE
R1 IC
IB
VC
VB
R2 RE
VE
RC
RC
IC
ICVC VCC
= β IB
= -
Vcc
Figura 5
Figura 6
20 ELECTRONICA y servicio No.24
duce una corriente mayor en el colector, la cualprovoca que en éste aparezca un voltaje igual alde alimentación menos la caída de voltaje quese llegue a producir en Rc. Pero en vista de quenos hallamos en condiciones estáticas, estosvoltajes son invariables.
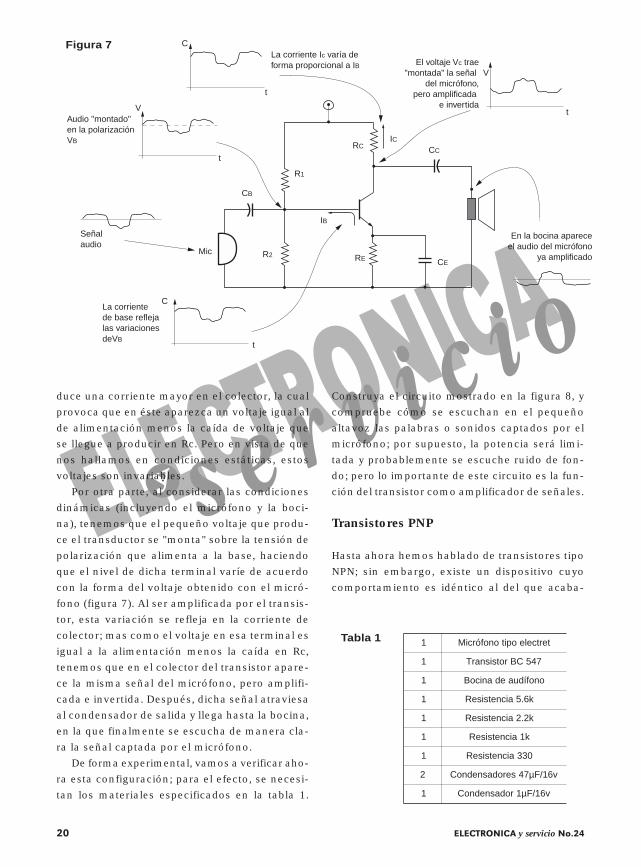
Por otra parte, al considerar las condicionesdinámicas (incluyendo el micrófono y la boci-na), tenemos que el pequeño voltaje que produ-ce el transductor se "monta" sobre la tensión depolarización que alimenta a la base, haciendoque el nivel de dicha terminal varíe de acuerdocon la forma del voltaje obtenido con el micró-fono (figura 7). Al ser amplificada por el transis-tor, esta variación se refleja en la corriente decolector; mas como el voltaje en esa terminal esigual a la alimentación menos la caída en Rc,tenemos que en el colector del transistor apare-ce la misma señal del micrófono, pero amplifi-cada e invertida. Después, dicha señal atraviesaal condensador de salida y llega hasta la bocina,en la que finalmente se escucha de manera cla-ra la señal captada por el micrófono.
De forma experimental, vamos a verificar aho-ra esta configuración; para el efecto, se necesi-tan los materiales especificados en la tabla 1.
Construya el circuito mostrado en la figura 8, ycompruebe cómo se escuchan en el pequeñoaltavoz las palabras o sonidos captados por elmicrófono; por supuesto, la potencia será limi-tada y probablemente se escuche ruido de fon-do; pero lo importante de este circuito es la fun-ción del transistor como amplificador de señales.
Transistores PNP
Hasta ahora hemos hablado de transistores tipoNPN; sin embargo, existe un dispositivo cuyocomportamiento es idéntico al del que acaba-
Mic
Señalaudio
Audio "montado"en la polarizaciónVB
La corriente Ic varía de forma proporcional a IB
En la bocina apareceel audio del micrófono
ya amplificado
La corrientede base reflejalas variacionesdeVB
El voltaje Vc trae"montada" la señal
del micrófono,pero amplificada
e invertida
CB
R1
R2 RE
IB
ICRC CC
CE
V
C
t
t
t
t
C
V
1 rciM ó tertceleopitonof
1 745CBrotsisnarT
1 onofíduaedanicoB
1 k6.5aicnetsiseR
1 k2.2aicnetsiseR
1 k1aicnetsiseR
1 033aicnetsiseR
2 v61/Fµ74serodasnednoC
1 v61/Fµ1rodasnednoC
Figura 7
Tabla 1

21ELECTRONICA y servicio No.24
mos de describir, pero con voltajes inversos: eltransistor PNP, el cual, como su nombre lo indi-ca, está construido con una capa superior P, unacapa N intermedia y una capa P final. Su símbo-lo se muestra en la figura 9.
Los transistores de este tipo fueron muy po-pulares en los inicios de la electrónica moderna,porque resultaba más fácil producir transistoresPNP a partir de germanio. No obstante, cuandose comenzó a utilizar el silicio, se demostró queera más sencilla la construcción de transistoresNPN; por eso estos últimos predominan en la ac-tualidad, y aquéllos sólo se emplean en casosestrictamente indispensables (por ejemplo, en losamplificadores de audio construidos con dispo-sitivos discretos, donde, para aprovechar almáximo las posibilidades de polarización de labocina, se emplea una configuración conocidacomo "par complementario").
El voltaje de polarización base-emisor
Hablemos ahora de otra aplicación del transis-tor. Ya vimos que la unión entre la base y elemisor puede considerarse como un diodo, yque, a su vez, entre el ánodo y el cátodo de estemismo aparece una caída de voltaje de aproxi-madamente 0.3 voltios para dispositivos degermanio y 0. 7 voltios para dispositivos de sili-cio. Precisamente, esta caída de voltaje es inevi-table y se conoce como "voltaje de polarizaciónbase-emisor de un transistor"; puede ser apro-vechada en múltiples aplicaciones.
Con objeto de mejorar el desempeño de lafuente que nos propusimos construir en esta se-rie de artículos, vamos a apoyarnos en dichacaracterística de los transistores. Observe en lafigura 10, que hasta este momento tenemos unafuente de voltaje directo y que se ha colocadoun diodo zener para impedir las posibles varia-ciones en la alimentación de AC. Pero este dise-ño no resulta muy conveniente, si consideramosque el circuito conectado entre los extremos deldiodo puede llegar a requerir un consumo demagnitud importante de corriente; la caída devoltaje en la resistencia de protección podría sermayor que la diferencia entre el voltaje obteni-
Mic.
47 µ/16V
5.6 K
2.2 K 1 K
33047 µ/16V
1 µ/16V
5 V
BC547
Transistor tipo PNPColector
Base
Emisor
1K
4x 1N4001
127/12V1A
LED
2200µF25V
5.6V330Ω
560Ω +
Figura 8 Figura 9
Figura 10

22 ELECTRONICA y servicio No.24
do en la salida del puente rectificador y el volta-je del diodo zener; de ser así, este último dispo-sitivo dejaría de realizar su función estabiliza-dora.
Para resolver tal situación, el zener tiene quereforzarse con un transistor (figura 11). Observeque se trata del mismo circuito que ya construi-mos, pero al cual se le ha conectado un transis-tor NPN con el colector hacia la salida del puen-te de diodos, la base hacia el propio zener y elemisor funcionando como salida de voltaje dela fuente; así, el voltaje de diodo zener perma-nece fijo, absorbiendo las posibles variacionesen la alimentación; y dado que el voltaje entre labase y el emisor del transistor también perma-nece fijo, en la salida de la fuente tenemos comoresultado un voltaje regulado que es igual a latensión del zener menos la caída de voltaje base-emisor (misma que por lo general se ubica entre0. 6 y 0. 7 voltios). En nuestro circuito, debido a
que el zener es de 5.6 voltios, la salida de volta-je será de entre 4.9 y 5 voltios de DC.
Para comprobar experimentalmente la situa-ción anterior, necesitamos un transistor TIP-31(cuyo encapsulado y disposición de terminalesse aprecia en la figura 11) y un condensador de1uF a 16 voltios; ambos dispositivos deben co-nectarse como se indica en la misma figura. Midacuidadosamente el voltaje que hay en la salidadel puente de diodos, en el diodo zener y en elemisor del transistor, y anote los resultados;compárelos con los niveles teóricos menciona-dos anteriormente. Enseguida conecte diferen-tes cargas a la salida del transistor, y mida lacorriente que circula por la salida del mismo;podrá comprobar que no obstante que se pre-sentan grandes variaciones en esta corriente, elvoltaje de salida permanece prácticamente cons-tante. Y así, experimentando, hemos construido
1K
+5VTIP 314x 1N4001
127/12V1A
LED 2200µF25V 5.6V
560Ω+
+ 1µF16V
TIP31
1.- Base2.- Colector3.- EmisorLa aleta está conectadaa terminal 2
12
3
_
A B
S1
IB
IC
IC
IB
IB IC
S1S1
Cerrado AbiertoZona de saturación
Zona de saturación = transistor comportándose como corto-circuito
0 0
Estado de corte = transistor comportándose como circuito abierto
Figura 11
Figura 12

23ELECTRONICA y servicio No.24
ya una fuente regulada de 5 voltios que nos apo-yará en múltiples prácticas.
El transistor como interruptor controlado
Expliquemos con cierto detalle la aplicación delos transistores como interruptores controlados.Ya mencionamos que, de acuerdo con un factorque depende de la construcción del propio dis-positivo, un transistor amplifica la corriente apli-cada en su base. Pero esta vez hay que precisarque dicha amplificación generalmente va de 30a más de 300 veces; pese a ello, cuando a travésde la base del transistor se aplica una corrienteconsiderable, el dispositivo llega a un punto enel que no puede seguir amplificándola; y no im-porta que la corriente de base siga aumentando,pues la de colector ya no se incrementará.
En este nivel, denominado "punto de satura-ción", el transistor se comporta como un corto-circuito (figura 12A). En la situación opuesta,cuando no existe voltaje en la base del transis-tor, a través del colector circulará una corrienteigual a cero; en este caso se dice que el disposi-tivo se encuentra en "punto de corte"; o sea, secomporta como un circuito abierto (figura 12B).
De las explicaciones anteriores, se deduce queel transistor puede comportarse como un inte-rruptor mecánico; pero en vez de abrirse y ce-rrarse físicamente, para llevarlo al punto de sa-turación sólo hay que aplicar en su base unvoltaje lo suficientemente alto; de esta forma seobtiene un interruptor "cerrado"; y para obtenerun interruptor "abierto", basta con retirarle todovoltaje a fin de colocarlo en punto de corte.
Para comprobar experimentalmente este fe-nómeno, utilizaremos la fuente regulada ante-rior pero con algunos componentes adicionales
que se especifican en la tabla 2. Construya el cir-cuito que se muestra en la figura 13, y comprue-be que los LEDs se encienden al momento deaccionar el push-button (y por supuesto, que alliberar éste se apaguen aquéllos).
Aunque en este circuito en particular el tran-sistor parece estar sobrando (se obtendría el mis-mo resultado si conectáramos el push-button enlas terminales C y E del propio transistor), exis-ten ocasiones en que, para activar el voltaje, envez de un botón se dispone en la entrada de uncircuito integrado; la incapacidad de éste paramanejar una gran magnitud de potencia, es sol-ventada precisamente mediante la inclusión deun transistor; así, finalmente, es posible mane-jar dispositivos de mediana o alta potencia conseñales de control muy débiles.
Veamos otra aplicación del transistor comointerruptor; con los materiales indicados en latabla 3, habremos de construir el circuito que semuestra en la figura 14. Observe que se trata deuna configuración de dos transistores conecta-dos en forma simétrica, con la base de uno co-nectada al colector del otro a través de un con-densador. Para llegar a ambos colectores, lafuente de voltaje atraviesa sendas resistencias yLEDs que se encenderán cada vez que por elloscircule una corriente.
otreibaetnemlamron"nottub-hsuP"1
DELsodoiD2
021edaicnetsiseR1
745CBrotsisnarT1
k01edaicnetsiseR1
Fuente5v
BC547
120Ω
10kΩ
Pushbutton
+
-
745CBserotsisnarT2
sDEL2
k1edsaicnetsiseR2
k001edsaicnetsiseR2
v61/Fµ01edserodasnednoC2
Tabla 2
Tabla 3
Figura 13

24 ELECTRONICA y servicio No.24
Conecte el circuito a la fuente de voltaje yaconstruida, y verifique el comportamiento de losLEDs. Si todo trabaja normalmente, observaráque estos indicadores se encienden de maneraalternada con una frecuencia regular; esto sig-nifica que también los transistores se están en-cendiendo y apagando alternadamente. Si pu-diéramos utilizar un osciloscopio para verificarel voltaje que existe en cualquiera de los colec-tores, veríamos una imagen como la que semuestra en la figura 15: una señal cuadrada con5 voltios de amplitud y baja frecuencia, aunqueeste último valor se puede cambiar ya sea modi-ficando los valores de las resistencias de base ode los condensadores; para hacer la prueba, sus-tituya los condensadores de 10 uF por unos de4.7 uF y observe cómo la frecuencia de parpa-deo de los LEDs se duplica.
Con este circuito tan sencillo, hemos cons-truido un oscilador capaz de generar una señalcuadrada cuya frecuencia puede controlarsemediante los valores de la resistencia y de loscondensadores empleados; por eso es muy im-portante hacer una cuidadosa selección de to-dos estos elementos.
Nuestro pequeño oscilador también sirve parainyectar señales en circuitos de audio (a fin decomprobar el funcionamiento de los mismos) ycomo generador de pulsos para circuitos digita-les (en cuyo caso, el compendio de aplicacionessólo queda limitado por su imaginación). En lafigura 16, se muestra un generador de este tipo
accionado por baterías y encapsulado en una je-ringa hipodérmica para su fácil transporte y uti-lización.
Comentarios finalesEstas son las principales aplicaciones de los tran-sistores bipolares, aunque no las únicas. Con-forme avance en sus estudios de electrónica,seguramente encontrará múltiples circuitostransistorizados donde la función específica del
1k 1k
10µ 10µ
100k 100k
5vFigura 14 Figura 15
Figura 16
25ELECTRONICA y servicio No.24
dispositivo no es tan evidente; no obstante, siusted conoce sus principios de operación, nodeberá tener problemas para deducirlo.
Transistor de efecto de campo (FET)
Aunque los transistores comunes funcionan con-venientemente en la mayoría de aplicaciones quetienen, hay casos especiales en que no ofrecenuna solución idónea. Por ejemplo, supongamosque se tiene un dispositivo sensor cuya señalqueremos amplificar, pero existe el inconvenien-te de que este elemento no puede suministrarninguna corriente para excitar la base de un tran-sistor común; en estas condiciones, lo más apro-piado es emplear un dispositivo que en vez denecesitar corriente de entrada para amplificar-la, puede excitarse directamente con el voltaje
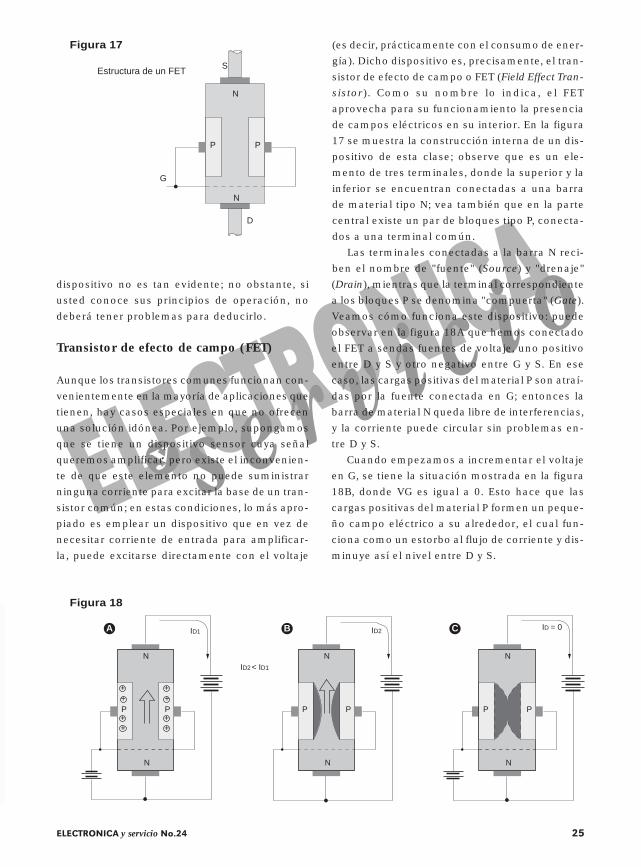
(es decir, prácticamente con el consumo de ener-gía). Dicho dispositivo es, precisamente, el tran-sistor de efecto de campo o FET (Field Effect Tran-sistor). Como su nombre lo indica, el FETaprovecha para su funcionamiento la presenciade campos eléctricos en su interior. En la figura17 se muestra la construcción interna de un dis-positivo de esta clase; observe que es un ele-mento de tres terminales, donde la superior y lainferior se encuentran conectadas a una barrade material tipo N; vea también que en la partecentral existe un par de bloques tipo P, conecta-dos a una terminal común.
Las terminales conectadas a la barra N reci-ben el nombre de "fuente" (Source) y "drenaje"(Drain), mientras que la terminal correspondientea los bloques P se denomina "compuerta" (Gate).Veamos cómo funciona este dispositivo: puedeobservar en la figura 18A que hemos conectadoel FET a sendas fuentes de voltaje, uno positivoentre D y S y otro negativo entre G y S. En esecaso, las cargas positivas del material P son atraí-das por la fuente conectada en G; entonces labarra de material N queda libre de interferencias,y la corriente puede circular sin problemas en-tre D y S.
Cuando empezamos a incrementar el voltajeen G, se tiene la situación mostrada en la figura18B, donde VG es igual a 0. Esto hace que lascargas positivas del material P formen un peque-ño campo eléctrico a su alrededor, el cual fun-ciona como un estorbo al flujo de corriente y dis-minuye así el nivel entre D y S.
S
N
P
G
D
P
N
Estructura de un FET
N
A B CID1
ID2
ID2 ID = 0
< ID1
P P
N
++
++
++
++
N
P P
N
N
P P
N
Figura 17
Figura 18

26 ELECTRONICA y servicio No.24
Finalmente, cuando a G se le proporciona unvoltaje positivo (figura 18C) el campo eléctricoproducido por los bloques P es tan amplio quebloquea por completo el flujo de corriente, conlo cual el transistor entra en "corte".
Es fácil apreciar entonces que este dispositi-vo trabaja con voltaje en vez de funcionar basa-do en corriente. Por lo tanto, estos transistoresposeen una muy alta impedancia de entrada, yprecisan de una corriente muy reducida para tra-bajar (del orden de pocos microamperes). Estolos hace ideales para aplicaciones como ampli-
ficadores de termopares, amplificadores de altaimpedancia de entrada, switches accionados porvoltaje, etc.
En la figura 19 se muestra el símbolo de lostransistores FET canal N (el que acabamos deexplicar) y canal P (el equivalente a un transis-tor PNP pero en FET ), así como sus encapsuladosmás comunes. Vamos a realizar un experimen-to, para comprobar la utilización de un FET; ne-cesitaremos el "mosquito" que construimos an-teriormente (figura 14), además de un FET tipoNTE587, una resistencia de 10 Kohms y una re-sistencia de 100 ohms.
Si usted trató de utilizar el mosquito para, porejemplo, inyectar una señal de audio a una bo-cina, habrá descubierto que el circuito deja deoscilar; esto obedece a que al conectar una car-ga elevada en cualquiera de los colectores delos transistores, se pierde la situación simétricaque permite la oscilación del circuito; con ello,el mosquito queda inservible. Para evitar esa si-tuación, debemos incorporar un elemento queamplifique la señal oscilante del mosquito y que,al mismo tiempo, presente una mínima cargahacia los transistores, a fin de que la condiciónsimétrica se mantenga y la oscilación no se pier-da aunque se conecte el circuito a una carga re-lativamente elevada. En tales circunstancias, untransistor FET resulta casi ideal, según veremosa continuación.
Conecte el transistor NTE587 al mosquito,conforme a lo que se muestra en la figura 20.Observará que en tal caso, la señal oscilante deuno de los colectores del mosquito llega hastala puerta del FET a través de una resistencia de10k. Y como el FET casi no consume corriente,la condición simétrica de funcionamiento delmosquito prevalece; por su parte, el FET perma-nece encendiéndose y apagándose al mismo rit-mo de la señal oscilante. De esta manera, si aho-ra conectamos la bocina directamente hacia laterminal de fuente del FET, comprobaremos quela oscilación no se pierde y que el circuito tienela fuerza suficiente como para que escuche aun-que sea de manera débil.
Concluye en el próximo número
D
SD
SCanal N
Símbolo y encapsulados más comunes de un FET
Canal P
Figura 19
1k 1k
GG
S
S
OUT
D
D 10k
0.1µ 0.1µ
100k 100k 100Ω
5v
NTE587
Figura 20

27ELECTRONICA y servicio No.24
MEDICIONES DE
VOLTAJE, FRECUENCIA Y
TIEMPO CON
OSCILOSCOPIO
MEDICIONES DE
VOLTAJE, FRECUENCIA Y
TIEMPO CON
OSCILOSCOPIO
Armando Mata Domínguez
En este tercer artículo de la seriededicada al conocimiento y uso del
osciloscopio, describiremos cómorealizar diversas mediciones con este
aparato. Al igual que en los dosartículos anteriores, con la finalidad
de ejemplificar las explicacionesemplearemos un osciloscopio de la
marca HAMEG, modelo HM1004. Esimportante aclarar que, para hacer
cualquier tipo de medición, esindispensable que usted conozca el
funcionamiento de los controles ybotones del panel frontal del
instrumento; así que lerecomendamos tenga a la mano el
artículo anterior de esta serie.
Generalidades
Las medidas más comunes que se pueden anali-zar en una forma de onda captada mediante elosciloscopio, son:
a) Frecuencia. Se mide en Hertz (Hz), y repre-senta el número de ciclos que una señal serepite durante un segundo; de esta forma, unpulso por segundo es equivalente a 1 Hertz.
b) Periodo. Se define como "el tiempo que tardala señal en completar un ciclo"; de tal suerte,el periodo y la frecuencia tienen una relacióndirecta (figura 1).
c) Voltaje. Es el nivel de potencial eléctrico entredos puntos de una señal (entre el valor máxi-mo y mínimo de ésta). A la medición de estetipo de voltaje se le conoce también con elnombre de "valor de pico a pico" (figura 2).
d) Fase. Representa el número de grados eléctri-cos en que una señal se retrasa o se adelanta

28 ELECTRONICA y servicio No.24
con respecto a otra. Cuando se comparan dosseñales y ambas inician y terminan al mismotiempo, se dice que "están en fase"; mas si seobserva que una inicia y termina antes que laotra, se dice que "están desfasadas” (figura3).
Por ser medidas directas y que no requieren deningún tipo de conversión aritmética, las medi-das más básicas que se llegan a comprobar son
la de voltaje y la de periodo. Para efectuar lamedición de cualquiera de ellas, es necesario queusted conozca el funcionamiento de los boto-nes del panel frontal del osciloscopio (nueva-mente le sugerimos que consulte el artículo an-terior de esta serie).
Como usted recordará, todos los osciloscopiosdisponen de tres secciones básicas: vertical, ho-rizontal, y disparo; pero también tienen unosconectores o bornes del tipo BNC, en donde seconectan las puntas de prueba (figura 4).
En su mayoría, los osciloscopios actualescuentan con dos canales etiquetados como "ca-nal I" y "canal II" o "canal A" y "canal B"; estonos permite comparar dos señales distintas. Al-gunos osciloscopios más sofisticados –por ejem-plo, el modelo HM1004 de HAMEG– poseen tam-bién un interruptor etiquetado como AUTOSET;basta oprimirlo, para que se ajusten de maneraautomática los controles del aparato (figura 5).
Periodo
El selector de tiempopor división determina,mediante la cuadrícula,
el periodo de la señal y,una vez calculado éste,
se puede obtener la frecuencia.
Valor máximo
Valor mínimo
El selector de Volts/Divdetermina el valor decada cuadro en sentidovertical; la suma deéstos es el voltaje depico a pico.
Señales en fase
Fase de señaldel canal 1
Fase de señaldel canal 2
Sección horizontal
Sección de disparo
Sección vertical
Figura 1
Figura 2
Figura 3
Figura 4
29ELECTRONICA y servicio No.24
Si el osciloscopio que usted emplea carece deesta prestación, es indispensable que ajuste losdiferentes controles a su posición estándar an-tes de efectuar cualquier tipo de medición.
Procedimiento para realizar mediciones
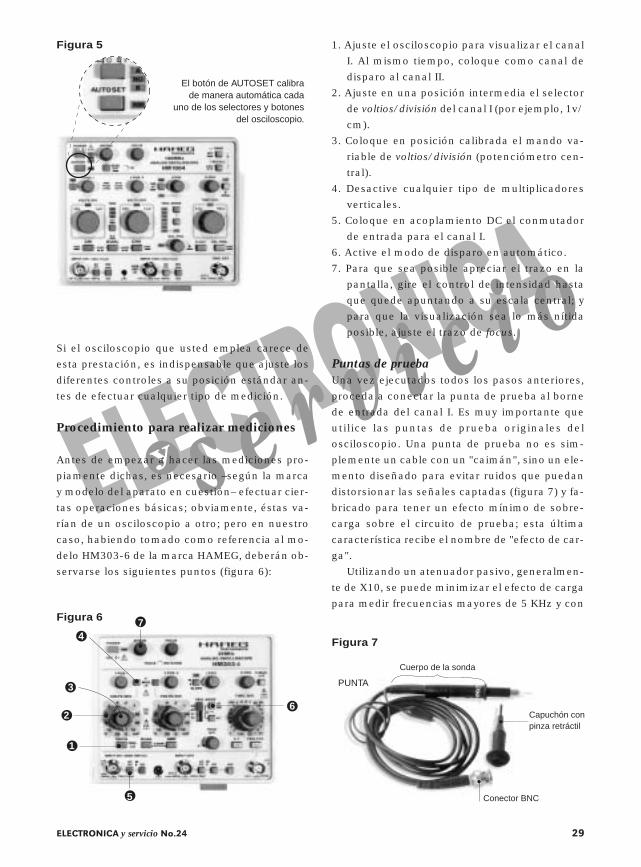
Antes de empezar a hacer las mediciones pro-piamente dichas, es necesario –según la marcay modelo del aparato en cuestión– efectuar cier-tas operaciones básicas; obviamente, éstas va-rían de un osciloscopio a otro; pero en nuestrocaso, habiendo tomado como referencia al mo-delo HM303-6 de la marca HAMEG, deberán ob-servarse los siguientes puntos (figura 6):
1. Ajuste el osciloscopio para visualizar el canalI. Al mismo tiempo, coloque como canal dedisparo al canal II.
2. Ajuste en una posición intermedia el selectorde voltios/división del canal I (por ejemplo, 1v/cm).
3. Coloque en posición calibrada el mando va-riable de voltios/división (potenciómetro cen-tral).
4. Desactive cualquier tipo de multiplicadoresverticales.
5. Coloque en acoplamiento DC el conmutadorde entrada para el canal I.
6. Active el modo de disparo en automático.7. Para que sea posible apreciar el trazo en la
pantalla, gire el control de intensidad hastaque quede apuntando a su escala central; ypara que la visualización sea lo más nítidaposible, ajuste el trazo de focus.
Puntas de pruebaUna vez ejecutados todos los pasos anteriores,proceda a conectar la punta de prueba al bornede entrada del canal I. Es muy importante queutilice las puntas de prueba originales delosciloscopio. Una punta de prueba no es sim-plemente un cable con un "caimán", sino un ele-mento diseñado para evitar ruidos que puedandistorsionar las señales captadas (figura 7) y fa-bricado para tener un efecto mínimo de sobre-carga sobre el circuito de prueba; esta últimacaracterística recibe el nombre de "efecto de car-ga".
Utilizando un atenuador pasivo, generalmen-te de X10, se puede minimizar el efecto de cargapara medir frecuencias mayores de 5 KHz y con
El botón de AUTOSET calibrade manera automática cada
uno de los selectores y botonesdel osciloscopio.
74
3
2
1
5
6
Figura 5
Figura 6
Cuerpo de la sonda
PUNTA
Capuchón conpinza retráctil
Conector BNC
Figura 7
30 ELECTRONICA y servicio No.24
9mΩ
Condensador semifijo de ajuste
El borne de pruebaproporciona una señalcuadrada de 0.25V depico a pico, la cual esgenerada por el mismoosciloscopio
1
2
3
4
5
6
7
81 2 3 4 5 6 7 8 9 10
Ochodivisionesen sentidovertical(eje Y)
Diez divisiones en sentido horizontal (eje X)
Cincosubdivisioneshorizontales
Cinco subdivisionesverticales
Figura 8
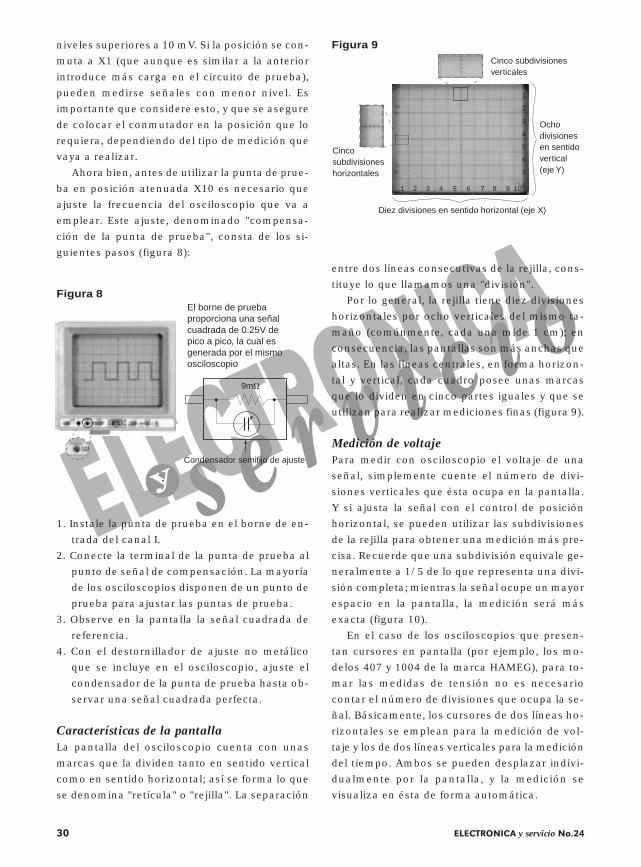
Figura 9niveles superiores a 10 mV. Si la posición se con-muta a X1 (que aunque es similar a la anteriorintroduce más carga en el circuito de prueba),pueden medirse señales con menor nivel. Esimportante que considere esto, y que se asegurede colocar el conmutador en la posición que lorequiera, dependiendo del tipo de medición quevaya a realizar.
Ahora bien, antes de utilizar la punta de prue-ba en posición atenuada X10 es necesario queajuste la frecuencia del osciloscopio que va aemplear. Este ajuste, denominado "compensa-ción de la punta de prueba", consta de los si-guientes pasos (figura 8):
1. Instale la punta de prueba en el borne de en-trada del canal I.
2. Conecte la terminal de la punta de prueba alpunto de señal de compensación. La mayoríade los osciloscopios disponen de un punto deprueba para ajustar las puntas de prueba.
3. Observe en la pantalla la señal cuadrada dereferencia.
4. Con el destornillador de ajuste no metálicoque se incluye en el osciloscopio, ajuste elcondensador de la punta de prueba hasta ob-servar una señal cuadrada perfecta.
Características de la pantallaLa pantalla del osciloscopio cuenta con unasmarcas que la dividen tanto en sentido verticalcomo en sentido horizontal; así se forma lo quese denomina "retícula" o "rejilla". La separación
entre dos líneas consecutivas de la rejilla, cons-tituye lo que llamamos una "división".
Por lo general, la rejilla tiene diez divisioneshorizontales por ocho verticales del mismo ta-maño (comúnmente, cada una mide 1 cm); enconsecuencia, las pantallas son más anchas quealtas. En las líneas centrales, en forma horizon-tal y vertical, cada cuadro posee unas marcasque lo dividen en cinco partes iguales y que seutilizan para realizar mediciones finas (figura 9).
Medición de voltajePara medir con osciloscopio el voltaje de unaseñal, simplemente cuente el número de divi-siones verticales que ésta ocupa en la pantalla.Y si ajusta la señal con el control de posiciónhorizontal, se pueden utilizar las subdivisionesde la rejilla para obtener una medición más pre-cisa. Recuerde que una subdivisión equivale ge-neralmente a 1/5 de lo que representa una divi-sión completa; mientras la señal ocupe un mayorespacio en la pantalla, la medición será másexacta (figura 10).
En el caso de los osciloscopios que presen-tan cursores en pantalla (por ejemplo, los mo-delos 407 y 1004 de la marca HAMEG), para to-mar las medidas de tensión no es necesariocontar el número de divisiones que ocupa la se-ñal. Básicamente, los cursores de dos líneas ho-rizontales se emplean para la medición de vol-taje y los de dos líneas verticales para la medicióndel tiempo. Ambos se pueden desplazar indivi-dualmente por la pantalla, y la medición sevisualiza en ésta de forma automática.

31ELECTRONICA y servicio No.24
Control de posiciónhorizontal
Selector de tiempoen escala de 0.1 de
miliseg.
Tiempo de 0.2 miliseg
Frec. = 1Tiempo real
Figura 10
Posición del selectorde tiempo de x-y
0˚ 35˚
a b
90˚ 180˚
Dependiendo de la prueba que se realice, en la pantallase observarán alguno de estos oscilogramas.
Figura 11
Figura 12
Medición de tiempo y frecuenciaPara medir el tiempo de una señal, se utiliza laescala horizontal del osciloscopio. Esto incluyela medición de periodos y la anchura de impul-sos. La frecuencia es una medida indirecta quese obtiene al calcular el inverso del periodo.
Al igual que en el caso de los voltajes, paramedir los tiempos de una manera más precisase requiere que la señal ocupe la mayor parteposible de la pantalla (para lo cual se utiliza elselector de la base de tiempo). Y si para centrarla señal deseamos hacer uso del control de po-sición vertical, podemos tomar como referencialas subdivisiones centrales a fin de lograr unamedición más exacta (figura 11).
Medición de señales desfasadasUno de los métodos que se emplea para medirdos señales desfasadas, consiste en activar elmodo X-Y; es decir, se requiere introducir unaseñal por el canal vertical (generalmente canalI) y otra por el canal horizontal (canal II). Estemétodo funciona de forma correcta, siempre ycuando ambas señales sean de tipo senoidal; eneste caso, la forma de onda que se presenta enpantalla se denomina "figura de Lissajous". Parapoder deducir la fase entre estas dos señales, asícomo su relación de frecuencias, observe lasgráficas que se muestran en la figura 12.
Comprobación de componentesPor último, una de las aplicaciones de las figu-ras de Lissajous, es la comprobación de compo-nentes. Si activamos el botón de COMP TESTER,aparecerá en la pantalla una línea horizontal deaproximadamente ocho divisiones de longitud;en ese momento, usted puede conectar las pun-

32 ELECTRONICA y servicio No.24
tas de prueba en los bornes correspondientes (fi-gura 13).
Para determinar el estado en que se encuen-tra un componente, se toman como referencialas diferentes figuras de Lissajous que aparecenen la pantalla del osciloscopio, tal y como se ob-serva en la figura 13A.
Cortocircuito
Transf. de red primario
Diodo zener bajo 7v
Diodo de silicio
Rectificador Tiristor, G y A conectados Tramo B-E con 1µF+680Ω Diodo de silicio con 10µF
B-E paralelo con 680ΩDiodo en serie con 51Ω
Diodo en paralelo a 680Ω Dos diodos antiparalelo
Diodo de germanio
Diodo zener sobre 7v
Condensador 33µF Tramo E-C
Tramo B-C Tramo B-E
FET
Resistencia 510Ω
Imágenes de componentes sueltosImágenes de transistores sueltos
Imágenes de diodos sueltos Imágenes de semiconductores en el circuito
Figura 13
Figura 13A
33ELECTRONICA y servicio No.24
NUEVA GENERACION
DE SISTEMAS DE
COMPONENTES DE
AUDIO
NUEVA GENERACION
DE SISTEMAS DE
COMPONENTES DE
AUDIO
Armando Mata Domínguez
Introducción
Los sistemas de componentes de audio han evo-lucionado al ritmo de los cambios tecnológicos;por ejemplo, la sustitución de secciones y pro-cesos tradicionalmente analógicos y mecánicos,por dispositivos y recursos digitales. De igualmanera, se ha incluido una gran cantidad de fun-ciones (muchas de ellas inéditas hasta hace po-cos años), que hacen del equipo un sistema muyversátil: ecualizador, control remoto, circuitotimer, apagado y encendido programado, proce-sadores digitales para simular sonido ambien-tal, grabadora para almacenamiento digital enMiniDisc (así como en CD y en formato MP3,según la información que recientemente recibi-mos de Japón), etc.
Este panorama en el mundo del audio case-ro, permite hablar ya de equipos de una genera-ción claramente diferenciada de sus predeceso-
En este artículo, hablaremos de laestructura general de los modernossistemas de componentes de audio.
Básicamente, haremos unaradiografía técnica de estos aparatos,
enfocando nuestra atención en losrecursos digitales que de manera
gradual se les ha incorporado, y quede alguna manera parecen anunciar
la digitalización total del audio.
34 ELECTRONICA y servicio No.24
res totalmente analógicos, o cuando mucho conreproductor de CD. Y no se trata solamente deaparatos más evolucionados, sino conceptual-mente más cercanos a sistemas informáticos queconvergen hacia la síntesis digital, de los cualesla computadora es un buen ejemplo.
¿Por qué decimos esto? Si usted piensa en losformatos que es posible escuchar en un sistemade componentes de audio, podrá advertir que lasseñales analógicas van en retirada. Según el tipode aparato, típicamente se manejan señales deradio, de audiocasete, de CD, de MiniDisc y –se-gún las noticias que tenemos– próximamente enformato MP3 y DVD (este último sólo en la mo-dalidad de reproducción); sólo los dos primerosformatos son analógicos, y ya también cabe pen-sar en su obsolescencia.
Por ejemplo, desde hace varios años se trans-miten señales de radio en sistemas de televisiónsatelital (como DirectTV), lo que sienta basespara la desaparición de la transmisión radialanalógica, mediante el desarrollo de sistemas deradio alternativos (en Internet ya es un hecho,aunque aún es muy rudimentario).
El audiocasete, por su parte, va en franca re-tirada, pues en algunos países como Japón yano se venden equipos con el tradicional deck,sino con unidad para grabación de CDs. Hastaahora, sólo había dos recursos para reproducirCDs en pequeña escala: mediante una compu-tadora provista con unidad de escritura de CD-ROM o mediante un equipo específico lanzadopor Philips.
Pero ya con esta posibilidad, cualquier per-sona podrá reproducir sus CDs como lo haría conun casete de audio (sin embargo, no hay que ol-vidar que el estándar que seguramente predo-minará en los próximos años es el DVD, por loque la ventaja es tardía, aunque de todas mane-ras se justifica).
Además, el advenimiento de formatos digita-les con compresión, como el muy popular MP3,parecen presagiar un cambio radical en la in-dustria discográfica y, por lo tanto, en la formaen que el usuario adquiere, almacena y procesasu software musical. Mediante estos formatos,es perfectamente posible comprar la música porInternet, sin necesidad de acudir a la tienda de
discos o de comprar un álbum específico, puesel cliente selecciona “a la carta” el contenido desu disco (y por cierto que es mucho más barato);si usted es usuario de Internet, visite la páginawww.mp3.com.
De hecho, varias compañías discográficas hananunciado su interés por crear sistemas de ven-ta de música por Internet; incluso, hay una de-manda legal por parte de la industria discográficade Estados Unidos, contra el sitio MP3 (dondees posible obtener de manera gratuita y legalmiles de canciones).
Por ahora no vamos a profundizar más enestas cuestiones, pero téngalas en cuenta, pueslo más probable es que nos dirigimos hacia ladigitalización total del audio (y del video). Porello, cuando hablamos de sistemas de compo-nentes de “nueva generación”, no solamente nosreferimos a equipos con mejores prestaciones yventajas funcionales, sino a una gama de apa-ratos en los que ya puede avizorarse un nuevoconcepto en el manejo de señales de audio. Perocomo es obvio, tenemos que enfocar este artí-culo a sistemas y procesos que ya están en cir-culación, y que por lo tanto pueden resultarlemás familiares a nuestro lector. Es justamentelo que haremos.
Qué es un sistema de componentes
Un sistema de componentes de audio, es un equi-po en el que se integran diversos subsistemas(sintonizador, tocacintas, reproductor de CD,ecualizador, amplificador, etc.), para ofrecer demanera combinada diversos recursos de audio;dichos subsistemas o secciones se agrupan enuna misma estructura, son alimentados por lamisma fuente y dependen de un sistema de con-trol central para su operación.
Según el tipo y modelo de equipo, las seccio-nes pueden estar conectadas en forma de mó-dulos, o bien estar físicamente integradas en unmismo gabinete; pero eso no es lo más relevan-te desde el punto de vista del concepto, sino elhecho de que trabajan de manera conjunta y deque comparten recursos electrónicos (el siste-ma de control y la fuente).

35ELECTRONICA y servicio No.24
Aunque no hay un estándar muy preciso, se-gún su tamaño, a estos equipos también se lesconoce como “minicomponentes” (los más pe-queños), “midicomponentes” (de tamaño media-no) o, simplemente, “sistemas de componentes”.Sin embargo, no hay mucha diferencia desde elpunto de vista de las prestaciones; sus diferen-cias son más bien de magnitud física y, en algu-nos casos, de potencia de salida. Nosotros utili-zaremos de manera genérica el término “sistemade componentes”.
Las ventajas más importantes de este tipo deaparatos son:
1) No se precisa conectar diferentes equipos in-dependientes, lo cual simplifica el manejo yla organización del sistema de audio; de estamanera, basta una sola orden de encendidopara alimentar a cada uno de los aparatosincluidos.
2) Se reduce considerablemente el tamaño delequipo (¿recuerda las antiguas consolas?).
3) Se logra una interacción entre los diversosaparatos que no siempre es posible alcanzarcon la conexión de equipos independientes.
En virtud de estas ventajas, los sistemas de com-ponentes han llegado a ser muy populares, ocu-pando un porcentaje muy elevado de ventas, loque a su vez ha estimulado a los fabricantes a
agregar e innovar funciones, ofrecer mayor po-tencia, etc.
Para ejemplificar lo anterior, tomemos comoreferencia el equipo GRX90AV de la marca Sony(figura 1).
Las principales características de este equiposon: sintonizador digital con treinta memorias;doble deck digital; ecualizador con quince mo-dos memorizados y cinco modos personales;reproductor de discos compactos con controla-dor de tres discos y capacidad de intercambio.Además, cuenta con un sistema llamado MusicExpress, para la fácil reproducción con un solotoque; con circuitos para Dolby Prologic y DolbyDigital con entrada de 5.1 canales (aplicacionesideales para el complemento de Home Theater);potencia máxima de 2,600 watts (PMPO); fun-ciones de DJ mix; y un sistema de altavoces multi-direccional de cuatro vías y cinco unidades.
Operación general
En la figura 2 se muestra el diagrama a bloquesde un sistema de componentes. Como puede ob-servar, la estructura es similar a la de cualquierequipo de audio convencional, con la diferenciade que se incluye un circuito microcontroladormás potente, que se encarga de coordinar cadauna de las funciones del aparato; esto es posiblegracias a la aplicación de circuitos más peque-ños y poderosos.
Figura 1
En el modelo GRX90V de lamarca Sony, se integran lamayoría de las característicasque distinguen a loscomponentes de nuevageneración

36 ELECTRONICA y servicio No.24
Fuente de alimentación
La fuente de alimentación de los sistemas com-ponentes utiliza varios reguladores, ya sea comotransistores o como circuitos integrados.
Estos aparatos también cuentan con unafuente permanente para mantener energizado almicrocontrolador, aun cuando el equipo se en-cuentre apagado. El propósito de esta alimenta-ción es tener acceso a algunas funciones muyimportantes por medio del control remoto (en-cendido, reloj y otras).
La figura 3, muestra un diagrama representa-tivo de las fuentes de alimentación utilizadas enlos modernos sistemas de componentes deaudio, que son de tipo lineal. En primera instan-cia, se pueden apreciar varios puentes rectifica-dores, encargados de proporcionar voltajes po-sitivos y negativos; estos voltajes son reguladoso estabilizados a través de transistores de tipo
bipolar. También se encuentran asociados a lafuente de alimentación, los sistemas de protec-ción que se encargan de apagar al equipo cuan-do exista un sobreconsumo de corriente o unamala conexión de bocinas; o si llegara a presen-tarse una falla o daño en los transistores de sa-lida de potencia de audio.
Secciones de AM/FM
Una de las modificaciones más notables en lossistemas de componentes de nueva generación,es la inclusión de la sintonía digital que, al igualque otras secciones, ha mejorado sus caracte-rísticas para brindar más comodidades al usua-rio.
Este tipo de sintonía presenta múltiples ven-tajas en comparación con la sintonía analógica.Podemos destacar las siguientes:
SECCIONSINTONIZADORA
AM /FM
Antena
SECCION DECD
SELECTOR DEFUNCIONES
SECCIONDE DECKS
Diagrama a bloques
MICROCONTROLADOR
DISPLAY
ECUALIZADOR
FUENTE DEALIMENTACION
STBY
V-
V+
V
TECLADO
RL
AMPLIFICADORDE POTENCIA AF
AUX
Figura 2

37ELECTRONICA y servicio No.24
• Capacidad de memorizar las estaciones prefe-ridas por el usuario, de modo que pueden vol-ver a ser seleccionadas con la simple presiónde una tecla.
• Mayor control sobre la frecuencia sintonizada(con precisiones de hasta una décima de KHzen el caso de AM, y de hasta una centésima deMHz en el caso de FM).
• Funciones de búsqueda automática de estacio-nes activas o a través de la perilla Multi Jog,para lograr un acceso más rápido.
Sin embargo, y pese a estas innovaciones, lasección de AM/FM funciona bajo el mismo prin-cipio general de la sintonía digital con circuitosPLL. Por salir del objetivo principal de este artí-culo, daremos sólo una breve explicación.
El proceso digital con circuitos PLL consisteen ordenar la señal recibida por la antena, utili-zando una oscilación producida y controladalocalmente por los circuitos de sintonía. Poste-riormente, esta señal pasa por una o varias eta-pas de FI (frecuencia intermedia), en donde seeliminan las señales no deseadas y se amplifica
el audio recibido hasta darle un nivel adecuadopara su posterior manejo. Finalmente, se encuen-tra la etapa detectora, en donde se recupera lainformación de audio de la señal recibida y que-
Diagrama representativo de unafuente de alimentación lineal utilizadaen los componentes de nueva generación Al Display
Poweron
Q109POWCONT
D102 105Q101. Q104Q105. 106
REG
Al CPU
-B
(MAIN C.B.)
P-ON
ACCOM
H. U. MODELSAC 120/220/240
120V 220V 240VF2
8
7
6
5
4
3
2
1
O
120V
F1
S101
D
100
120
PT1
AC2AC1
VMVCC
-VFL
TO1C151
Del circuito protectordetector de sobrecargas
Del circuito protectordetector D.C.
+BB101
D106D107Q102
Figura 3
Diagrama a bloquesde la sintonía digital PLL
DelMicroprocesador
DataClock
Enable
AMP DERF
Antena
ControladorPLL
V+
Fet desintonía
F I
Detector
Audio
Mezclador
OsciladorLocal
Figura 4

38 ELECTRONICA y servicio No.24
da lista para enviarse a la etapa de amplifica-ción de potencia.
Como puede apreciar, aun cuando se utilizannuevas tecnologías, el proceso de recepción deradio casi no ha cambiado en los últimos 100años (figura 4). Cabe preguntarse cuánto tiem-po durará más este sistema.
La sección de tocacintas
A pesar de que los sistemas de grabación deaudio en formato digital (DAT, MiniDisc, DCC y,próximamente, CD y MP3) ofrecen innumerablesventajas, en países como el nuestro no son muycomunes, o sólo se incluyen en aparatos espe-cializados y de mayor costo (figura 5).
Es un hecho que predominan los tocacintastradicionales o decks en la mayoría de sistemasde componentes de audio, ofreciendo inclusoprestaciones muy variadas y que requieren aten-ción por parte del especialista electrónico. Porejemplo: la mayoría de sus funciones puedenejecutarse mediante control remoto; se han sus-tituido las teclas mecánicas por switches dimi-nutos; cuentan con una sincronización directapara la grabación de CD; se agregan sensores
para detectar una cinta floja o para controlar elgiro de los carretes; etc. Y, obviamente, todasestas posibilidades descansan en el microcon-trolador, que es el dispositivo coordinador de lasdiversas funciones.
La figura 6 muestra la sección a bloques delos decks. Observe que están controlados por elmicrocontrolador (System Control IC101). Lasterminales T0 a T9, conjuntamente con I-K0 a I-K5, quedan conectadas a la matriz de tecladopara las funciones de reproducción, retroceso yavance.
Las terminales 50 a 52 (O-SOL), son las en-cargadas de conmutar los solenoides que acti-van las funciones previamente seleccionadas porel teclado; por ejemplo, al oprimir la tecla PLAYpara el deck 1, la terminal 50 de IC101 pasa a unnivel lógico bajo, con lo que el transistor excita-dor Q115 activa al solenoide Play Sol (DECK 1),y automáticamente el equipo entra en el modode reproducción de la cinta.
Circuito selector de funciones
Resulta evidente en los equipos de nueva gene-ración, la sustitución de los interruptores mecá-
Figura 5
A pesar de la evolución que han presentado los sistemas de tocacintas o decks, elempleo -cada vez más generalizado- de los nuevos sistemas de almacenamiento deaudio (CD, MD, MP3) va en aumento.

39ELECTRONICA y servicio No.24
DECK 2
54 LH
SFR301 (SFR302)
Q1 SPEED SW
Q303 (Q304)Q301 (Q302)EQ SW
O305 (Q306)D1 PB ON
IC301( MAIN C.B)NJM2068SD
Q355(Q356)EQ SW
D2 PBAMP
D1 PB
AMP
IC301
H-SP
ZLH
DECK 1. PH
VRF
SFR351 SFR (352)
DECK 2. RPH
Q351 (Q352)PB ON
VRF
SFR451(SFR452)
Q503 (Q504)Q505 (Q506)
ES SW
RECAMP
IC501(MAIN C.B.)BA154BN
NJM206BSDQ501 (Q502)REC. MUTE
Q353(Q354)REC. ON
VRF
IC351Q357 (Q358)D2 PB ON
SFR501(SFR502)
RECOUT
RECIN
LINEOUT
VCC
SOL FR2
SOL PL2
H-SP
MOTOR
SOL FR1
SOL PL1
OFF ON
H-5F
IC401(MAIN C.B)
(14)
(16)
REC
JPB
S816DOLBY B NR SW
PBIN(14)
(4)
ON/OFFDOLBY
IC401. CX1102P
REC/PB
REC/PBSENSADJ.
2LH
VM
R464
Q453BIAS
ON/OFF SW
Q501 506 (MAINC.B.)
REC/PBFREQ.RESPONSEADJ.
Q451Q452
BIAS QSC
Q456
INV
D451
SF
R45
1
DECK 2.EH
PB (D1) SENS ABJ
1 LH
DECK 1
PLAY SOL
FR SOL
MOTOR
S4 LH
PLAY SOL
FR SOL
MOTOR
M
M
4 2
4 2 3
5
6
44
45
46
47
48
53
52
51
50
49
1
12
8
2LH
5FR
501
2 4
Q112 SOL FR2 DRIVE
Q113 SOL FR2 DRIVE
Q116 MOTOR DRIVE
Q115 SOL PL1 DRIVE
Q114 SOL FR1 DRIVE
Q1 SPEED SW
SOL PL1
MOTOR
SOL.FR1
SOL.FR2
HSP
REC
RMT
BIAS
1. PB
SOL.PL2O-SOL.PL2
O-SOL.FR2
O-HSP
O-REC
O-RMT
O-BIAS
O-1 . PB
Q-MOTOR
O-SOL. FR1
D- SOL PL1
MIC
RO
PR
OC
ES
AD
OR
Diagrama de la sección de decks
PB (D2) SENS-ADJ.
Figura 6

40 ELECTRONICA y servicio No.24
nicos por teclados de tipo digital. Esto se ha lo-grado gracias a los avances alcanzados en loscircuitos integrados, que son capaces de funcio-nar como conmutadores de señal.
El selector de funciones moderno ya no re-quiere ningún mantenimiento, como sucedía conlos de tipo mecánico, cuando el desgaste o su-ciedad afectaba su funcionamiento y acortabala vida útil del switch (figura 7).
En la figura anterior se aprecia que las termi-nales 1, 5, 12, 14 y 15 de IC201 son las líneas
que se emplean para la conmutación de las se-ñales de sintonización, micrófono y auxiliar. Asu vez, la activación de estas funciones depen-de de las terminales 9, 10 y 11, que son acciona-das por el microcontrolador. El proceso es rela-tivamente simple, pues al seleccionar en el panelfrontal o a través del control remoto alguna delas funciones mencionadas, el microcontroladorenvía un nivel lógico bajo, exclusivamente a laterminal correspondiente.
1
12
15
14
5
9 10 11
3 28
M
2 1
Q505Q506Q507Q508
MOTOR DRIVE
(FRONT C.B.)
BALANCEVR502
FRONT c.B.
Q501(Q502)
BUFFER
VOL. MVR501
IC401(FRONT C.B.)
MS218L)
D-BBE
D-DSL
D-VR UP
D-VR ON
I-HOLD
D-FUNC-A
D-FUNC.B
D-FUNC.C
D-S1-DATA
D-S1-CLK
A
B
C
DATA
CLK
I-STEREO
I-TUNE
D-CE.PLL
Al Sintonizador PLL
Q111
BB
E
IS301BBE
*R-C5424B
IC30 (FRONT C.B.)
(MAIN C.B.)
Q201(Q202)
BUFFERIC201(IC202)
HD14051BP
IC201 (IC202)(MAIN C.B)
FUNCTION SW
AUX
PH
TU
TP
CBC B A
C B A
OUTIN(5)
RE
F
DE
F
ON
/OF
F IC401GEQ(12)
(6) (7)
32 17 16
24
39
40
41
42
43
4
29
3
2
23
31
32
30
STEREO
TUNE
CPU
LINEAS I/O DECONMUTACION LOGICA
A la sección de audio
Circuito selector de funciones
DATA
STEREO
TUNE
De lasección de
RF
CLOCK
BBELEVEL
Figura 7
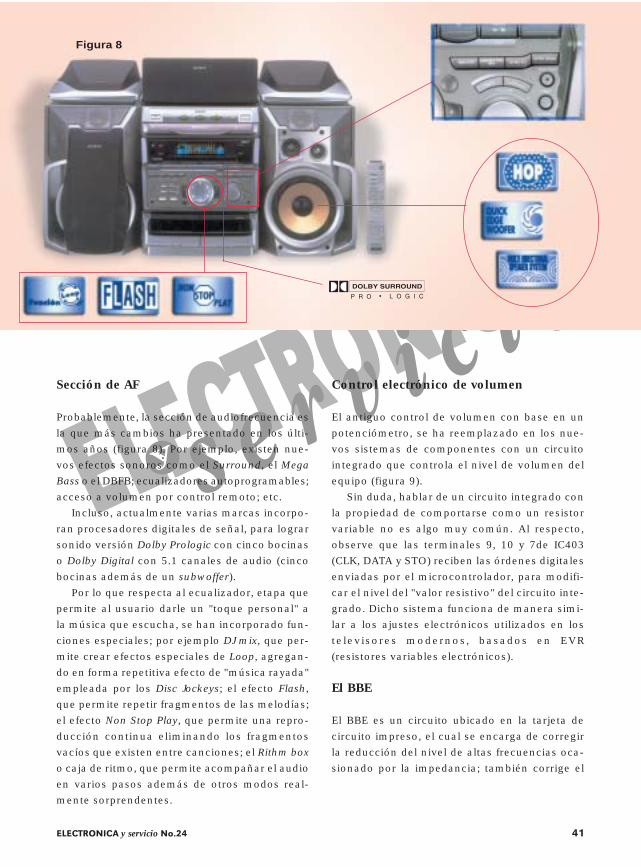
41ELECTRONICA y servicio No.24
Sección de AF
Probablemente, la sección de audiofrecuencia esla que más cambios ha presentado en los últi-mos años (figura 8). Por ejemplo, existen nue-vos efectos sonoros como el Surround, el MegaBass o el DBFB; ecualizadores autoprogramables;acceso a volumen por control remoto; etc.
Incluso, actualmente varias marcas incorpo-ran procesadores digitales de señal, para lograrsonido versión Dolby Prologic con cinco bocinaso Dolby Digital con 5.1 canales de audio (cincobocinas además de un subwoffer).
Por lo que respecta al ecualizador, etapa quepermite al usuario darle un "toque personal" ala música que escucha, se han incorporado fun-ciones especiales; por ejemplo DJ mix, que per-mite crear efectos especiales de Loop, agregan-do en forma repetitiva efecto de "música rayada"empleada por los Disc Jockeys; el efecto Flash,que permite repetir fragmentos de las melodías;el efecto Non Stop Play, que permite una repro-ducción continua eliminando los fragmentosvacíos que existen entre canciones; el Rithm boxo caja de ritmo, que permite acompañar el audioen varios pasos además de otros modos real-mente sorprendentes.
Control electrónico de volumen
El antiguo control de volumen con base en unpotenciómetro, se ha reemplazado en los nue-vos sistemas de componentes con un circuitointegrado que controla el nivel de volumen delequipo (figura 9).
Sin duda, hablar de un circuito integrado conla propiedad de comportarse como un resistorvariable no es algo muy común. Al respecto,observe que las terminales 9, 10 y 7de IC403(CLK, DATA y STO) reciben las órdenes digitalesenviadas por el microcontrolador, para modifi-car el nivel del "valor resistivo" del circuito inte-grado. Dicho sistema funciona de manera simi-lar a los ajustes electrónicos utilizados en lostelevisores modernos, basados en EVR(resistores variables electrónicos).
El BBE
El BBE es un circuito ubicado en la tarjeta decircuito impreso, el cual se encarga de corregirla reducción del nivel de altas frecuencias oca-sionado por la impedancia; también corrige el
Figura 8

42 ELECTRONICA y servicio No.24
9
8
6
ROUT
Q154AMF
Q153AMP
L151LPF
FU
NC
TIO
N
CO
NT
CLO
CK
CLK
DAT
AD
ATA
STO
(13)
IC403IC9154APELECT. VR
SIR
OR
E
K. M
UT
E
Q341
Q342
Q334
Q329MUTEDRIVE
X OUT
I7014.5 MHZ
AM IN
FM MONO
SD
STE
FM
AM050O
FM MONO
A B C
L152LPF
LOUT
P
ST
11
12
14
15
9 8
1 2 3 4 5
910A B
13
5 7
VCR/AUX PHONOJ1 - 1.2 J1 - 3.4
IC304HD145QZBP
FUNCTION SW
SW
STEREO
17 18 19 16 15 14 13B
C
A
80
75
11
69
72
6
Q343MUTEDRIVE
9 10 7 4
3 2 5 6
5 7MM455PD
AMP
IC602NOM45580
G.EO
IC601XRC5424B
V V
EF
MIC MIX
BA15218N
MICAMP
IC605 12/21
IC605 11/21
MICAMP
VR612 BA152
IN OUT
LEO402 LEO401+10.3V
+10.3V
BBEPROCE SSOR
BBE-LEVEL BBESW601V9611
(15)(14)
mm
(12) (11)
(15)
IC306POWER
AMP
ST<4142-M<2
(13)
Q339MUTE
IC604B4152
BBE
1 1012
5
17 32 14
17
3 1
Diagrama esquemático de circuito de control de volumen
Figura 9
retardo de fase que sufren las altas frecuenciascon respecto a las bajas frecuencias.
El funcionamiento del circuito BBE, consisteen comparar las medias y altas frecuencias deaudio en relación con las señales de entrada; yel resultado de esta comparación es lo que ajus-ta el nivel de las altas frecuencias hasta obtenerun nivel óptimo entre ambas.
Sistemas de protección
Actualmente, los sistemas de protección se uti-lizan de manera generalizada en los sistemas decomponentes. Probablemente usted ha observa-do un par de relevadores a la salida de los am-plificadores, entre las conexiones de las bocinas
y los propios amplificadores de potencia; puesbien, estos relevadores son desactivados por elmicrocontrolador si se produce alguna anoma-lía en el sistema.
En estos casos, los transistores denominadosOver Current Detector, conjuntamente con los lla-mados Protector Circuit, envían la señal de erroral microcontrolador, para que éste, a través dela terminal Hold, apague al equipo y se evite eldaño de más elementos.
Aquí concluimos este artículo, el cual nos ser-virá de referencia para próximos materiales y se-minarios de capacitación relacionados con lossistemas de componentes de audio de nueva ge-neración.

44 ELECTRONICA y servicio No.24
PUESTA A TIEMPO
DEL MECANISMO
DE VIDEOCAMARAS
DE 8mm SAMSUNG
PUESTA A TIEMPO
DEL MECANISMO
DE VIDEOCAMARAS
DE 8mm SAMSUNG
Armando Mata Domínguez y Rafael Gómez Castillo*
Generalidades
Las videocámaras de la marca Samsung SCA20y SCCL100, son dos equipos prácticamente idén-ticos, a excepción de que el segundo cuenta conuna pantalla de cristal líquido que se suma alvisor electrónico, por medio del cual se puedeobservar la imagen que graba el usuario; perode hecho el sistema mecánico que se incluye enambos modelos es el mismo.
Para las explicaciones de este artículo se tomócomo referencia el modelo SCA20, aunque –comoes obvio– el procedimiento también es aplicableal modelo SCCL100.
Las fallas y desajustes en la secciónmecánica de las videocámaras de
8mm, constituyen una de las causasmás comunes por las que requieren
servicio estos equipos. Siconsideramos que el funcionamiento
de dicha sección implica unconstante roce de sus partes, el
desgaste o desajuste puedeconsiderarse normal. En el presente
artículo hablaremos delprocedimiento para desensamblaruna videocámara, así como de los
puntos de ajuste del sistemamecánico. Para ello, tomaremos
como referencia el modelo SCA20 dela marca Samsung. * Este artículo está producido con el apoyo de Samsung Electronics
México, S.A. de C.V. (www.samsung.com.mx) Agradecemos espe-cialmente el apoyo del Ing. Guillermo Ramírez Barbosa, Gerente deServicio.
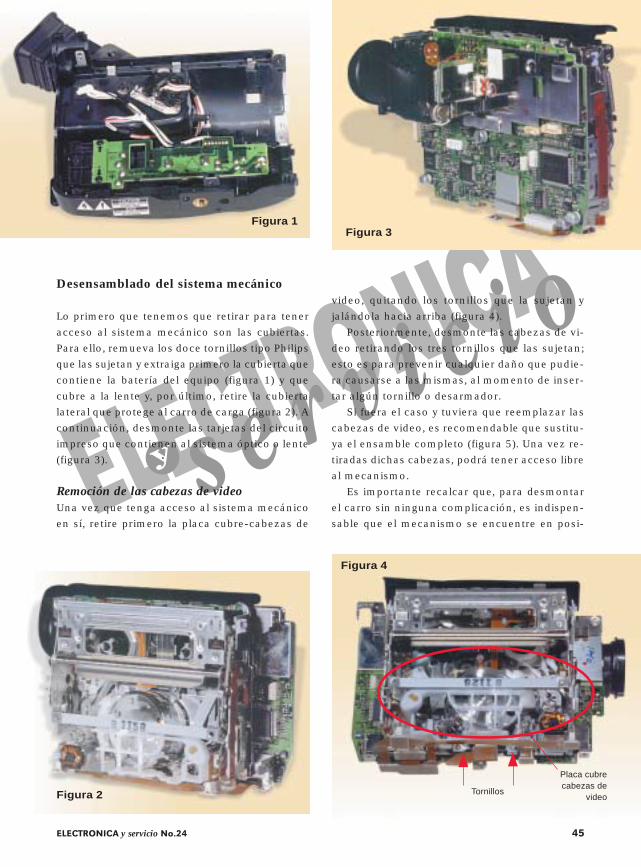
45ELECTRONICA y servicio No.24
Desensamblado del sistema mecánico
Lo primero que tenemos que retirar para teneracceso al sistema mecánico son las cubiertas.Para ello, remueva los doce tornillos tipo Philipsque las sujetan y extraiga primero la cubierta quecontiene la batería del equipo (figura 1) y quecubre a la lente y, por último, retire la cubiertalateral que protege al carro de carga (figura 2). Acontinuación, desmonte las tarjetas del circuitoimpreso que contienen al sistema óptico o lente(figura 3).
Remoción de las cabezas de videoUna vez que tenga acceso al sistema mecánicoen sí, retire primero la placa cubre-cabezas de
video, quitando los tornillos que la sujetan yjalándola hacia arriba (figura 4).
Posteriormente, desmonte las cabezas de vi-deo retirando los tres tornillos que las sujetan;esto es para prevenir cualquier daño que pudie-ra causarse a las mismas, al momento de inser-tar algún tornillo o desarmador.
Si fuera el caso y tuviera que reemplazar lascabezas de video, es recomendable que sustitu-ya el ensamble completo (figura 5). Una vez re-tiradas dichas cabezas, podrá tener acceso libreal mecanismo.
Es importante recalcar que, para desmontarel carro sin ninguna complicación, es indispen-sable que el mecanismo se encuentre en posi-
Figura 1
Figura 2
Figura 1Figura 3
Figura 2
Figura 4
Tornillos
Placa cubrecabezas de
video

46 ELECTRONICA y servicio No.24
ción de desenhebrado. Para ello, es necesarioordenar la descarga del sistema, aplicando unvoltaje de aproximadamente 4.5 voltios en lasdos terminales del motor de carga.
Extracción del carroPara extraer el carro, primero libere el par declips plásticos localizados en los extremos delmismo. Utilice un desarmador plano apoyándo-lo de tal manera que se levanten los clips quesujetan al carro (figura 6).
Retirados los seguros, sujete el carro y extrái-galo suavemente sobre sus mismos pernos dedeslizamiento; el carro ya libre se muestra en lafigura 7. A continuación retire la placa cubre-carretes, removiendo los dos tornillos que la su-jetan.
El péndulo impulsor de rodillos de carreteUna vez realizado el paso anterior, para retirarel péndulo impulsor de los rodillos de carrete,
primero tiene que retirar la arandela plástica quese encuentra en el centro del mismo. Tengamucho cuidado, porque es común que al mo-mento de retirarla, por estar sujeta con ciertapresión, la arandela salte y se corra el riesgo deperderla. Puede retirar entonces el péndulo consólo moverlo hacia arriba.
Desensamblado del subchasisPara tener acceso a las partes que más común-mente se dañan (como el juego de engranes), oponer a tiempo el sistema mecánico, es necesa-rio remover al subchasis.
En el subchasis se encuentran los brazostensores de cinta o brazos-guía; para retirarloses necesario liberar cuatro tornillos indicados en
Figura 5
Figura 6
Figura 7
Figura 8
Clip plástico
Tornillos

47ELECTRONICA y servicio No.24
la figura 8; una vez libre, jale al subchasis lige-ramente hacia arriba.
Mecanismo principalSobre el mecanismo principal se localizan la pla-ca deslizadora Slider, el motor de carga, el swit-ch de modo o encoder, el engrane cam o principaly el motor impulsor de cinta capstan (figura 9).
Los engranes que se dañan en esta secciónson los del switch de modo y/o el de acopla-miento, el cual hace contacto con el mismo in-terruptor de modo y el tornillo sinfin, conectadoal motor impulsor de carga.
Para tener acceso a estos engranes, extraigaprimero el motor de carga, quitando el tornillo
que lo sujeta y liberando las pestañas plásticas(figura 10).
Puesta a tiempo del mecanismo
Una vez terminado el servicio, como todas laspartes desmontadas del mecanismo actúan enforma conjunta, se requiere que al momento deensamblarlo se realicen los ajustes necesariospara que su funcionamiento no presente ningu-na anomalía.
Para ajustar el engrane encoder, debe hacer-se coincidir su flecha con la que se localiza enla base plástica del mecanismo (figura 11). Almismo tiempo, se tiene que hacer coincidir elorificio del engrane encoder con el orificio quese encuentra en el engrane cam o principal (fi-
Figura 10
Figura 9
Figura 11
Figura 12
CAM
Encoder
Motor de carga
Placa deslizadora
Capstan
Engrane encoder

48 ELECTRONICA y servicio No.24
gura 12). Cuando coloque el engrane cam, veri-fique que sus dos orificios coincidan con los ori-ficios de tamaño similar que se encuentran en elchasis (figura 13).
Una vez realizados los ajustes anteriores,podemos decir que técnicamente el sistemamecánico se encuentra sincronizado o a tiem-po. Y en ese momento usted puede iniciar el pro-ceso de ensamblado de las partes anteriormen-te retiradas. Durante el montaje de cada una delas partes, puede hacer una verificación de laoperación correcta del mecanismo. Para ello, ali-mente al motor de carga con un voltaje de 4.5voltios y verifique que los movimientos mecáni-cos se ejecuten libremente; ponga especial aten-ción en lo que se refiere al enhebrado y desen-hebrado de cinta.
Ajuste de brazos-guíaEn caso de que haya tenido que reemplazar losbrazos-guía, es muy probable que también se re-quiera efectuar un ajuste de los mismos.
Primero, gire el eje de los brazos-guía, talcomo se muestra en la figura 14 y, una vez ajus-tado, apriete el prisionero que los sujeta.
Si se llega a omitir el ajuste de los brazos-guía, seguramente se presentarán distorsiones
Figura 13
Figura 14
Sincroni-zación
CAM
Prisionero
Eje del brazoguía
Direcciónde giro
en la imagen o sonido al momento de reprodu-cir o grabar la cinta.
Finalmente, le recomendamos que cada vezque trabaje en el sistema mecánico, lo lubriquecon grasa especial para mecanismos.
También tenga cuidado que, al momento deefectuar el ensamblado, cada una de las cubier-tas del equipo cierre correctamente, ya que deno hacerlo, se corre el riesgo que cualquiera deellas se rompa.


50 ELECTRONICA y servicio No.24
Una invitación y un motivo para estar al día
LA COMPUTADORA Y EL
SERVICIO TÉCNICO
De izquierda a derecha: Profr. J. Luis Orozco Cuautle; Ing. Mauricio Silis
Sánchez, cortando el listón inaugural junto con el Ing. Guillermo Ramírez
Barbosa; Ing. Atsuo Kitaura Kato; Ing. Rafael Gómez Castillo; Lic. Felipe
Orozco Cuautle e Ing. Juan Aguilar Zavala.
Ing. Mauricio Silis Sánchez dirigiéndose
a la audiencia.
El pasado 8 de Febrero, como apertura oficialde su sala de entrenamiento, Centro Japonés deInformación Electrónica (CJIE), contando con eldecidido apoyo de Samsung Electronics México,organizó un evento cuyo objetivo principal fueintroducir al especialista técnico, en el campo delas aplicaciones informáticas orientadas apoyarel servicio.
El primer orador fue el Lic. Mauricio SilisSánchez, Director de Operaciones de SamsungElectronics México, quien habló de los esfuerzosque ha hecho esta firma en la preparación deseminarios de actualización, traducción de ma-nuales y desarrollo de una línea de CD-ROMs con

51ELECTRONICA y servicio No.24
diagramas y manuales de servicio; todo ello orientado a la capacitación de especia-listas de sus propios talleres autorizados y de los técnicos de todo el país. Sin duda,una labor meritoria que ninguna otra firma lleva a cabo en esa magnitud.
Para este propósito, Samsung ha integrado un cuerpo de ingenieros muy profe-sionales que no sólo atienden la Red Nacional de Centros de Servicio, sino quetambién imparten capacitación, dirigen proyectos multimedia, escriben y traducenmanuales técnicos. Justamente, aprovechando la oportunidad que brinda este re-portaje, queremos hacer un reconocimiento al apoyo dado a esta publicación por elIng. Guillermo Ramírez Barbosa,Gerente de Servicio, así comopor los miembros de su equipotécnico, integrado por los inge-nieros Rafael Gómez Castillo,Juan Briones García y MiguelAngel Sosa García.
Posteriormente, tomó la pa-labra el Ing. Ramírez, quien hizouna breve semblanza de los orí-genes y filosofía de trabajo delcorporativo, las divisiones de laelectrónica que hoy atiende yalgunos de sus recientes logrosy perspectivas de expansión.También, como parte de su in-tervención, el Ing. Ramírez hizoel lanzamiento oficial de los tresprimeros CD-ROM con manua-
Ing. Guillermo Ramírez Barbosa
Primeros tres CD-ROM con manuales de servicio de Samsung

52 ELECTRONICA y servicio No.24
les de servicio de las siguientes líneas: electrónica de consumo e informática; en laprimera línea se incluyen sistemas de componentes de audio, televisores, videograba-doras, videocámaras y reproductores de DVD; en tanto, en la segunda línea seincluyen monitores de PC, impresoras láser y equipos de fax.
No hay duda que este esfuerzo marca un punto de referencia en el medio técni-co, e indiscutiblemente pone a Samsung a la vanguardia en la difusión y entrena-miento de los especialistas que brindan servicio a sus aparatos. De hecho, el Ing.Ramírez puso especial énfasis en las ventajas que ofrece el CD-ROM como mediode consulta de diagramas y manuales de servicio: es muy barato, compacto yversátil.
Enseguida, el Lic. Felipe Orozco Cuautle, Director Editorial de CJIE, dio a conocerel próximo lanzamiento de un producto multimedia en CD-ROM, titulado “Ensambleusted mismo su PC”, orientado a quienes desean construir su propio sistema, yasea para ahorrar algún dinero y optimizar su presupuesto en la modernización desu taller, o para dedicarse al ensamble y servicio a estas máquinas.
También habló del ciclo que está por iniciarse en el portal de Internet de CJIE(www.centrojapones.com), desde donde los técnicos de todo el mundo podrán ba-jar información gratuita en formato multimedia. Adicionalmente, como parte deesta misma etapa, anunció que ya está en marcha el proyecto piloto para impartirseminarios de actualización vía Internet. De esta manera, CJIE podrá ampliar lacobertura de sus servicios de entrenamiento a todo el mundo, aprovechando lasventajas que brinda la moderna tecnología.
Aspecto de la sala de entrenamiento; en el fondo el Lic. Felipe Orozco dirigiéndose
a la audiencia.

53ELECTRONICA y servicio No.24
Como último expositor, el Profr. José Luis Orozco Cuautle, Director General deCJIE, hizo la demostración de tres equipos que facilitan el trabajo de análisis decircuitos electrónicos: un osciloscopio con interfaz a PC de la compañía alemanaHameg; una tarjeta para PC de la compañía española Beta Instruments, que permi-te utilizar la computadora como osciloscopio; y un multímetro de la marca coreanaProtek, también con interfaz a PC.
Las ventajas de disponer de estos equipos en el taller son muy diversas; porejemplo: brindan la posibilidad de realizar análisis de señales que no siempre esposible efectuar en la forma tradicional; permiten hacer un registro histórico deformas de onda y mediciones, que se pueden consultar cuando se precisen o serenviadas por correo electrónico para la opinión de especialistas de otra región;también permiten establecer comparaciones y reportes técnicos; etc.
El Profr. Orozco, también habló de las ventajas que ofrece Internet a la comuni-dad de técnicos, ya sea como medio de consulta de información gratuita y de inter-cambio de experiencias a través de los foros dedicados.
Este encuentro entre amigos (que tuvo una amplia y entusiasta respuesta), noha hecho sino confirmar que se ha ido venciendo el escepticismo que tradicional-mente manifestaban muchos técnicos hacia el uso de la computadora en el taller.Enhorabuena por quienes ya han hecho de esta poderosa herramienta una compa-ñera de su trabajo cotidiano; no hay que olvidar que es un equipo que puede tenermultiplicidad de funciones de apoyo a nuestro trabajo, pues no sólo permite laejecución de aplicaciones electrónicas o la administración del taller, sino también laconsulta de manuales, diagramas y fallas en CD-ROM, la conexión de instrumentosde medición, y la obtención de información vía Internet. Lo invitamos a formarparte de esta ya no tan nueva comunidad de talleres informatizados.
El Profr. J. Luis Orozco explicando la operación del osciloscopio Hameg con
interfaz a PC.


55ELECTRONICA y servicio No.24
CODIGOS DE FALLAS
EN TELEVISORES
TOSHIBA
CODIGOS DE FALLAS
EN TELEVISORES
TOSHIBA
Armando Mata Domínguez
En este artículo se explican los pasosa seguir para acceder al modo de
servicio en los televisores Toshiba.En realidad, como usted sabe, los
llamados ajustes electrónicos –quehan venido a reemplazar a las
calibraciones con potenciómetro–consisten en una serie de pasos queno involucran mayor dificultad para
el especialista técnico, pero que loobligan a tener a la mano los
códigos respectivos.
Generalidades de los televisoresToshiba de reciente modelo
Podemos decir que la nueva generación de tele-visores Toshiba se encuentra a la par de los cam-bios tecnológicos, si tomamos en cuenta queestos aparatos ofrecen funciones realmentenovedosas y atractivas para el usuario. Por ejem-plo, algunos modelos tienen un tamaño de pan-talla de 16 por 9 pulgadas (lo que permite pre-sentar doble imagen en pantalla), audio multiple-xado, encendido y apagado programado, entradasde audio y video adicionales por línea, y ademáspueden mostrar en pantalla caracteres y menúo sintonizar hasta 181 canales.
Técnicamente, en el nuevo chasis de estostelevisores se ha incluido el bus denominado IICo I2C (Inter-Integrated Circuit); se trata de un busde comunicación digital en serie del tipo bidi-reccional, con dos líneas: SDA (serial data) y SCL(serial clock). Este sistema se ha podido utilizargracias a la aplicación de circuitos convertido-res digitales-análogos (que vienen en los circui-

56 ELECTRONICA y servicio No.24
tos integrados), los cuales se seleccionan pre-viamente y se habilitan por instrucciones que semanejan en el propio bus IIC.
A su vez, esto permite que la mayoría de losajustes que antes se efectuaban a través de re-sistencias o capacitores de tipo variable, ahorase realicen por medio del control remoto; es de-cir, la aplicación de convertidores análogos-di-gitales interconstruidos en los circuitos integra-dos, hace posible que a través de un software(serie de instrucciones previamente programa-das) se controlen o modifiquen los parámetrosde operación establecidos, y que se detecten yubiquen fallas por medio de los códigos que apa-recen en la pantalla del cinescopio. Esta inno-vación ha permitido depurar el uso de compo-nentes discretos, con la ventaja de poder fabricartelevisores más ligeros y menos voluminosos.
El sistema de control
Como mera referencia, y por la relación que guar-da con el proceso de diagnóstico de fallas, a con-tinuación mencionamos las características mássobresalientes del sistema de control utilizadoen los televisores Toshiba (figura 1):
• Memoria ROM de 64 KB.• Memoria RAM de 2 KB.• Velocidad de operación de 1.5 microsegundos.• Encapsulado del tipo DIL, con 42 terminales.• Bus IIC de dos canales, uno de ellos exclusivo
para la memoria EEPROM externa.
• Reloj de 8 MHz.• Función de ajustes (a través del modo de ser-
vicio) y función de diagnóstico de fallas. Estoúltimo es lo que permite definir el estado enque se encuentra el bus IIC en cualquiera desus dos canales; además, indica las veces quehan sido activados los circuitos de proteccióny verifica la comunicación a través de las lí-neas de video y el número de parte que corres-ponde al microprocesador.
Modo de servicio
La activación del modo de servicio, que permiterealizar ajustes a través del control remoto, selogra con la siguiente secuencia:
1. Encienda el televisor.2. Presione una sola vez la tecla MUTE del con-
trol remoto. Aparecerá la indicación de MUTEen la pantalla, y entonces se interrumpirá elaudio en la bocina (figura 2).
3. Para reactivar el sonido en la bocina, vuelva apresionar la tecla MUTE del control remoto ymanténgala oprimida.
4. Sin soltar la tecla MUTE del control remoto,oprima ahora la tecla MENU en el panel fron-tal del televisor. En el lado derecho de la pan-talla, aparecerá la letra «S» en color magenta;esto nos indica que se ha activado el modode servicio.
5. Con el propósito de realizar ajustes, presionenuevamente la tecla MENU en el panel fron-tal del televisor; en la pantalla aparecerá eldespliegue del menú de ajustes. Para selec-
Figura 1
Sistema de control utilizado en un televisor Toshiba CL21G30
Mute
Figura 2

57ELECTRONICA y servicio No.24
cionar cualquiera de ellos, utilice las teclasCHANEL UP y DOWN del control remoto (fi-gura 3).
6. Para modificar los datos de ajuste de cadaopción, utilice las teclas VOL+ y VOL– del mis-mo control, según sea el caso (tabla 1).
7. En televisores de reciente fabricación se hanincorporado algunos patrones de ajuste queexistían únicamente en aparatos de 27 o máspulgadas; para activarlo, una vez en el modode servicio, se presiona la tecla TV/VIDEO delcontrol remoto; y al presionar la tecla 8 sobreel mismo control remoto, aparecen los patro-nes de prueba sobre la pantalla (figura 4).Estos patrones se complementarán con unaseñal de audio de 1 KHz.
Menú
Modo de servicio
Item
Data
Figura 3 Tabla 1
metI tnemtsujdafoemaN teserP ataD
TUCR FFOTUCR H04
TUCG FFOTUCG H04
TUCB FFOTUCB H04
VRDG EVIRDG H08
VRDB EVIRDB H08
XTNC TSARTNOC-BUS H05
CTRB THGIRB-BUS H04
CLOC ROLOC-BUS HC2
CTNT TNIT-BUS H24
CVAS OCVPAS H02
TTA ROTAUNETTA H02
CVTS OCVOERETS H02
FRTS RETLIFOERETS H02
CEPS LARTCEPS H02
NABW NOITARAPESOERETS H02
SOPH NOITISOP.ZIROH H61
SOPV NOITISOP.TREV H20
TIH THGIEH H02
Pantalla normal
Campo rojo
Campo verde
Campo azul
Campo negro
Campo blanco
Cruz negra
Cruz blanca
Campo rojoCampo verdeCampo azulCampo negroCampo blanco
Blanco y negro
Señal Imagen Señal Imagen
Cruz negraCruz blancaCruz negra con fondoverde
Cuadrícula negraCuadrícula blanca
Puntos negros Puntos blancos
Señal hor. blancaSeñal hor. negra
Cruz negra con fondo verde
Barras negras
Barras blancas
Puntos blancos
Puntos negros
Cuadrícula blanca
Cuadrícula negra
Figura 4
Diagnóstico de fallas
1. Ponga el televisor en modo de servicio.

2. Presione la tecla 9 del control remoto, paraque aparezca el resultado del diagnóstico enpantalla.
3. A fin de interpretar las indicaciones, apóyeseen lo que se indica en la figura 5.
4. Después de hacer cualquier reparación en untelevisor, se recomienda actualizar el modode diagnóstico; de esta manera, posterior-mente se podrá utilizar como una herramientade información o bitácora de servicio.
5. Para actualizar el modo de servicio, presionela tecla CHANEL DOWN en el panel frontaldel televisor; al mismo tiempo, presione latecla DISPLAY del control remoto.Nota: No presione la tecla CHANEL UP; si lohace, provocará la iniciación de la memoriaEEPROM (cambiarán sus parámetros) y, enconsecuencia, se verá obligado a realizar nue-vos ajustes de cada uno de éstos.
6. Para salir del modo de servicio o del modo dediagnóstico de fallas, simplemente apague elequipo.
Comentarios finales
Tal como dijimos al principio de este artículo, lalínea de televisores Toshiba cuenta con tecnolo-gía de punta que redunda en comodidad y satis-facción para el usuario; pero también el técnicose ve beneficiado, puesto que se le facilita la ta-rea de reparación siempre y cuando –por supues-to– sepa utilizar correctamente sus funcionesadicionales.
Indica código de parte QA01
Verificación de comunicación
V1, V2, QV01, OV05Verifica la presencia de sincronía de la señal de video
Verifica la intercomunicación con líneas
Indica cantidad de activación del circuito de protecciónNo.239xxxx
POWER 00000
BUS LINE OK
BUS CONT OK
BLOCK UV
Indicaciones en pantalla
Figura 5

59ELECTRONICA y servicio No.24
CONSEJOS PARA EL
SERVICIO A RADIO-
GRABADORAS
PORTATILES
CONSEJOS PARA EL
SERVICIO A RADIO-
GRABADORAS
PORTATILES
Leopoldo Parra Reynada
Aunque el servicio a una radio-grabadora es realmente un proceso
de mínima complejidad, convieneobservar un procedimiento ordenadopara la localización y eliminación de
fallas. La gran ventaja de estosaparatos, es que sus bloques
internos son pocos y muy sencillos;máxime que algunas etapas se han
agrupado en circuitos integrados. Elorden en que deben verificarse
posibles averías, es el siguiente:fuente de poder, receptor de radio
(AM y FM), grabadora (secciónelectrónica y sección mecánica) y
amplificador de potencia.
Fuente de poder
En la figura 1 se indican los pasos para efectuarel diagnóstico de este circuito. La única obser-vación adicional que conviene hacer, es que nor-malmente la fuente de estos aparatos es capazde utilizar múltiples alimentaciones: corriente deAC, baterías o un eliminador externo. Siempretómelo en cuenta.
Receptor de radio
En la actualidad prácticamente todos los apara-tos incluyen sintonía en bandas AM y FM de fre-cuencia en un mismo bloque funcional, compar-tiendo diversos circuitos y componentes; estohace virtualmente imposible diagnosticarlos porseparado.
A decir verdad, esta etapa es muy fiel y sonpocas las fallas que llega a presentar en compa-

60 ELECTRONICA y servicio No.24
ración con otras secciones. No obstante, en lafigura 2 se especifica su proceso de diagnóstico.
Grabadora (parte electrónica)
Al contrario de lo que ocurre con la etapa de ra-dio, las secciones mecánica y electrónica de lagrabadora sí pueden diagnosticarse por separa-do. En realidad, los circuitos que forman unagrabadora de audio son muy sencillos; esto sim-plifica en gran medida su diagnóstico y la detec-ción de posibles errores (figura 3).
Grabadora (parte mecánica)
Es en esta etapa donde se presenta la mayoríade los problemas que llega a tener una radio-grabadora típica, debido principalmente a queel mecanismo de la grabadora está sujeto al des-
gaste natural y al maltrato por parte del usuario.Para diagnosticar esta etapa, lo único que senecesita es una observación cuidadosa y un co-
No
No
No
No
Sí
Sí
Sí
Sí
No
No
¿Las baterías están cargadas? Reemplacebaterías
Revise el socketde entrada de AC
Revise operación con AC
¿Llegan 120 Vac al aparato?Cheque cable
de alimentación
¿Sale voltaje del transformador?Fusible,
transformador
¿Sale voltaje de DC alos circuitos?
Diodos, filtros,reguladores
Revise operación con eliminador
¿El eliminador es el adecuado?(voltaje, corriente y polaridad)
Reemplaceeliminador
AC
Eliminador
Sí
Sí
¿Llega el voltaje a los circuitos?
Baterías
Figura 1
Sí
Sí
Sí
Sí
No
No
No
No
Encienda el aparato yseleccione el modo RADIO
¿Llega alimentación a loscircuitos de radio?
Limpie o reemplaceswitch selector
¿El sintonizador trabaja bien?Checar perilla, cordón,
condensador de sintonía,ajustar circuitos tanque.
¿Hay salida de losdemoduladores?
Circuito detector,desajustes en bobinay/o condensadores.
¿Se hace el switcheo enmodos MONO/ESTEREO?
Circuito decodificador,switch selector.
Etapa Ok
Figura 2
Sí
No
Sí
No
Sí
No
Sí
No
Sí
No
Sí
No
No
Sí
Amplificadores, ecualiza-dores, manejo de señal.
¿Hay oscilación de bias?
Switch demecanismo, fuente.
¿Llega alimentación a laetapa al presionar PLAY?
¿Funciona el micrófono? Checar conexiones
¿Hay grabación de audio?Estado de las cabezas,circuito acondicionador
de señal.
¿La grabación es limpia?Cabeza de borrado,
ajuste de polarización.
¿Reproduce bienlos casetes propios?
¿Reproduce bienotros casetes?
Etapa Ok
Transformador,transistor oscilador.
Azimuth, control develocidad, poleas.
Figura 3

61ELECTRONICA y servicio No.24
nocimiento básico del funcionamiento de moto-res, poleas, engranes y palancas; de tal suerte,su método de detección de fallas resulta muysencillo (figura 4).
Amplificador de potencia
Esta etapa es la encargada final de recibir porun extremo las señales de audio de bajo nivelque provienen del radio o de la grabadora, y deamplificarlas con la potencia suficiente comopara excitar a una o más bocinas.
En la actualidad, la mayoría de los amplifica-dores de potencia constan de un circuito inte-grado sencillo, lo cual facilita considerablemen-te su diagnóstico (figura 5).
Algunos consejos prácticos
Debido a su carácter portátil, las radio-grabado-ras están sujetas a un abuso extremo; se utili-zan en cualquier parte, llegando a estar expues-tas al humo, grasa, polvo y muy diversasimpurezas. Por lo tanto, es recomendable efec-tuar una limpieza tanto al gabinete como a loscontroles y al mecanismo; de hecho, deben con-siderarse explícitamente los siguientes puntos:controles e interruptores, cabeza magnética ypinch-roller, bandas y poleas, switches y siste-ma mecánico y exteriores.
Limpieza de los controles e interruptoresSe recomienda utilizar los líquidos en spray es-pecialmente elaborados para ello; el famoso Sili-jet es uno de los más populares. Localice el con-trol o interruptor que desea limpiar, y rocíe ensu interior una cantidad generosa (aunque noexcesiva) del líquido; mueva repetidamente laperilla o palanca en ambos sentidos, para que lafricción se encargue de remover las partículasde suciedad que posiblemente han sido afloja-das. Por último, compruebe el funcionamientodel aparato y repita la operación si lo consideranecesario.
Si después de una limpieza exhaustiva el con-trol aún no responde adecuadamente, lo mejores reemplazarlo.
Limpieza de la cabeza magnéticay del pinch rollerEn este caso se utilizan cotonetes empapadosen alcohol isopropílico, los cuales se frotan vi-gorosamente contra las superficies que tienen
No
Sí
No
Sí
No
No¿Poleas y bandasen buen estado?
Limpie y/o reemplace.
Alimentación del motor,mecanismo atascado.
¿Entran las cabezasde reproducción y el pinch
roller al oprimir PLAY?
¿Recoge bien la cinta? Falla en impulsor de carretes.Embragues sucios o gastados.
No
Sí
¿Cambia adecuadamen-te entre funciones (PLAY,
STEP, FF, PAUSE,REW, etc.)?
Problemas con palancas ysistema mecánico (láminasdobladas, resortes perdidos,
falta lubricación, etc.)
Mecanismo OK
Sí
¿Gira el motoral oprimir PLAY?
Sí
No
Sí
Falla en las palancas y teclasde función. Problema en
selenoides y sus excitadores.
¿Hace bien FF y REW? Engranes conectores,poleas y embragues.
Sí
No
Checar fuente depoder y protecciones.
Etapa OK
Sí
No
Sí
No
Sí
No
¿Llega el audio deradio o casete?
Checar etapas respectivas.Limpieza de interruptor
selector
¿Hay alimentacióndel amplificador?
¿Sube y baja el volu-men adecuadamente?
Limpieza o sustitucióndel control de volumen.
¿La potencia de salidaes adecuada?
CI amplificador de potencia.Revisar bocinas.
Figura 4
Figura 5

62 ELECTRONICA y servicio No.24
contacto con la cinta magnética. Ponga especialcuidado en la limpieza del pinch-roller, debido aque por lo general se le adhiere una gran canti-dad de partículas magnéticas desprendidas delos casetes. Verifique también que el capstan yla cabeza de borrado estén limpias.
Limpieza de bandas y poleasCuando estos elementos se ensucian, provocanque haya una menor adherencia y que, por con-siguiente, sea defectuosa la transmisión de fuer-za entre secciones mecánicas. Para limpiarlos,utilice también cotonetes y alcohol isopropílico;después del aseo, revíselos cuidadosamente afin de descubrir posibles grietas o fracturas (cual-quiera de ellos que las tenga, deberá ser reem-plazado de inmediato).
Limpieza de switches,sistema mecánico y gabineteLos switches y sistema mecánico se refieren alos interruptores mecánicos que en la etapa dela grabadora se incluyen para echar a andar elmotor impulsor. Estos interruptores suelen«flamearse» o ensuciarse, y para limpiarlos seutiliza una lija de agua de un calibre muy fino(alrededor de 200), con la que se deben retirartodas las partículas extrañas que hubieran podi-do alojarse entre los contactos. Por lo que res-pecta al mecanismo, su limpieza se hace concotonetes y alcohol; luego se lubrican de mane-ra cuidadosa los engranes y palancas.
Por último, la limpieza exterior o del gabine-te consiste en limpiar cuidadosamente todas lassuperficies externas del aparato, para devolver-les su brillo y color originales. Haga esto siem-pre que sea posible, para dar al cliente la impre-sión de un trabajo bien realizado.
Cuidados con el azimuth
En muchas ocasiones, las cintas grabadasprofesionalmente se escuchan opacas y sin vidacuando son reproducidas en cierto aparato; mascuando se introducen en otro, se escuchan bri-llantes y claras. Este síntoma es típico de un pro-blema de azimuth de la cabeza magnética.
El azimuth o inclinación que dicho elementopresenta con respecto a la cinta (figura 6), tieneque ser de cero en grabadoras de audio conven-cionales; o sea que la cabeza debe estar com-pletamente vertical.
Casi todos lo motores de radio-grabadoras pueden ajustarse ensu velocidad gracias a un potenciómetro interno. En lafotografía también se alcanza a apreciar parte del sistemamecánico, formado por bandas, poleas, engranes, palancas,etc., que se encargan del correcto transporte de la cinta.
Mal
Existe un ángulo entre la posiciónde la cabeza y la cinta
Cabeza y cinta alineadas
Bien
Figura 6
Figura 7

Si por cualquier error de fabricación o pormaltrato la cabeza ha perdido esta posición ver-tical, el audio comenzará a perder fidelidad enaltas frecuencias; esto produce un sonido apa-gado. Para eliminar esta falla, todas las graba-doras incluyen, exactamente a un lado de la ca-beza magnética, un tornillo de ajuste; éste deberámoverse mientras se encuentre en reproducciónuna cinta, y será fijado con una gota de barnizcuando el audio sea claro y vivo.
Velocidad del motor
En la mayoría de las radio-grabadoras moder-nas, existe un pequeño potenciómetro que per-mite controlar la velocidad de giro del motor
encargado del movimiento del capstan, lo quese traduce directamente en la velocidad de lacinta. Aunque a veces este potenciómetro vieneincorporado en la misma electrónica de la gra-badora, casi todos los mecanismos modernosposeen un motor que por dentro tiene el controlde velocidad (figura 7). Para acceder a este con-trol, es necesario emplear desarmadores de re-lojero; después, con objeto de comparar la velo-cidad de reproducción, ponga a funcionarsimultáneamente un casete y un CD que con-tengan el mismo tema musical. Se considera queel control está en posición correcta, cuando elaudio tanto del aparato que reproduce el casetecomo el del aparato que reproduce el CD se es-cuchan con la misma velocidad.

64 ELECTRONICA y servicio No.24
CASOS DE SERVICIO EN
SERVOMECANISMOS DE
VIDEOGRABADORAS
CASOS DE SERVICIO EN
SERVOMECANISMOS DE
VIDEOGRABADORAS
Alvaro Vázquez Almazán
En el presente artículo, haremos unabreve descripción del
funcionamiento de losservomecanismos utilizados en
videograbadoras modernas; tambiénveremos un método para aislar fallas
en estos circuitos, considerandocasos de servicio típicos, aunque noespecíficamente referidos a alguna
marca o modelo de videograbadora,sino más bien de carácter general.
Qué es un servomecanismo
Un servomecanismo, es un circuito electrónicoencargado de monitorear el correcto funciona-miento de cierto dispositivo. En videograbadoras,este circuito controla la velocidad de rotación yla fase tanto del motor de capstan como del mo-tor de drum; por lo tanto, los servomecanismosutilizados en una videograbadora son dos: elservomecanismo de capstan o cabrestante, y elservomecanismo de drum o tambor.
El servomecanismo de capstan
En una videograbadora, el servomecanismo decapstan funciona de dos maneras distintas: du-rante el proceso de grabación de la señal de vi-deo + audio, y durante el proceso de reproduc-ción de la misma. Veamos brevemente cada unode estos procesos.

65ELECTRONICA y servicio No.24
FG 3.58MHz
B+
CTL
Drive Servo control MicrocontroladorM
Servomecanismo de capstan en grabación
Ensamble AC
Cabeza de CTL
FG 3.58MHz
B+
CTL
Drive Servo control MicrocontroladorM
Servomecanismo de capstan en reproducción
Figura 1
Figura 2
Figura 3
Funcionamiento del servomecanismo decapstan durante la grabaciónDurante el proceso de grabación, el servomeca-nismo de cabrestante tiene la función de con-trolar la velocidad de rotación del respectivomotor de capstan. En la figura 1, podemos ob-servar que el circuito integrado servo recibe unaslíneas de control provenientes del circuito inte-grado microcontrolador; estas líneas se encar-gan de indicar al circuito servo la velocidad degrabación que el usuario ha elegido a través delpanel de control frontal o del control remoto.Mientras esto sucede, el circuito servo aplica ala cabeza de control (CTL) una señal cuadradacon una frecuencia de 30 Hz; esto es con la fina-lidad de ir “marcando” la posición exacta de lacinta con respecto a las cabezas de video.
La cabeza de control se encuentra en el tra-yecto que sigue la cinta desde el tambor hasta eleje del capstan (figura 2). Por otro lado, el circui-to servo necesita una señal de 30 Hz parasincronizar la señal de CTL con el pulso de sin-cronía vertical de la señal de video que se desea
grabar y con el giro de las cabezas; esta señal de30 Hz se obtiene del oscilador de 3.58 MHz quese utiliza para la demodulación de la señal decrominancia.
Funcionamiento del servomecanismo decapstan durante la reproducciónDurante el proceso de reproducción, el servo-mecanismo de capstan tiene que recuperar pormedio de la misma cabeza de control (CTL) laseñal que se grabó junto con la señal de video +audio (figura 3); esta señal conjunta, es precisa-mente la señal de CTL.
La señal CTL pasa entonces por un circuitoformador de onda y por un paso amplificador;este último le confiere la potencia suficiente parasu manejo posterior. Finalmente, esta señal cua-drada entra al circuito servo, en donde es com-parada con la señal del oscilador de 3.58 MHzpara determinar si ambas coinciden tanto en fre-cuencia como en fase; en caso de que exista al-guna diferencia, ésta tendrá que ser eliminada;con este propósito, a través del circuito driver(excitador) del motor capstan se expedirá unaseñal de corrección (voltaje de error); de estamanera se logrará que el motor de capstan girea su velocidad y fase correctas, para que la cintade video se desplace a una velocidad uniformefrente a las cabezas de video.
El servomecanismo de drum
La función del servomecanismo de drum, con-siste en mantener al motor de drum girando auna velocidad y fase constantes de 1800 revolu-ciones por minuto (R.P.M.); es decir, 30 revolu-

66 ELECTRONICA y servicio No.24
ciones por segundo, factor que al ser multiplica-do por 2 (pues son dos las cabezas de video) dapor resultado 60 tracks de información en unsegundo. En consecuencia, la exactitud de la ve-locidad y fase de giro de las cabezas de video, esun factor crítico para el correcto funcionamien-to de una videograbadora.
El funcionamiento del servomecanismo dedrum es muy similar al del servomecanismo decapstan, puesto que también necesita una señalde referencia generada por el propio mecanis-mo y una señal de referencia proveniente de unoscilador fijo (figura 4); de la comparación quehaga entre ambas, obtiene un voltaje de control(voltaje de error) que será aplicado al circuitodriver (excitador) del motor drum.
Las señales que el propio sistema mecánicogenera como referencia para controlar tanto lavelocidad como la fase de giro del motor drum,son: la señal de FG (Frecuencia Generada), quesirve para indicar la velocidad de giro del motorde drum, y la señal PG (Pulso Generado), que sir-ve para indicar la fase de giro del mismo motor.Estas señales se envían hacia el circuito servo,para ser comparadas con la señal de 3.58 MHzque se utiliza en el demodulador de croma; unavez procesadas, salen del circuito servo con des-tino al circuito driver (excitador) del motor drum,pero ya convertidas en un voltaje de control (vol-taje de error) que sirve para eliminar cualquierdiferencia de fase o de velocidad que pudieseexistir entre el motor drum y la cinta magnética.
Conclusiones
A pesar de las similitudes entre el servomeca-nismo de capstan y el servomecanismo de drum,existe una diferencia que resulta fundamental:
mientras el modo de operación del servomeca-nismo de capstan depende del modo en que seencuentre la videograbadora (grabación o repro-ducción), el servomecanismo de drum se com-porta de una sola manera tanto para el modo degrabación como para el modo de reproducción(ya que su función principal es garantizar que elmotor gire a 1800 R.P.M.)
Las fallas típicas del servo de capstan, son lassiguientes:
1) Presencia de tracking en la imagen, con de-formación del audio.
2) Motor de capstan acelerado.3) Alteración de la velocidad de reproducción.
Las fallas típicas del servo de drum, son:
1) Presencia de tracking en la imagen, con audionormal.
2) Imagen con pérdida de sincronía de color.3) Imagen con pérdida de sincronía horizontal.4) Inestabilidad vertical en la imagen.
Por otra parte, las fallas que afectan a amboscircuitos pueden identificarse fácilmente porqueprovocan que el motor no gire o que lo haga peroa una velocidad mayor o menor de la normal.
Procedimiento de localización de averías
El procedimiento para localizar fallas en cual-quiera de los dos circuitos servo, consiste enverificar que el sendero de cinta esté correcta-mente ajustado; si no lo está, los circuitos servono funcionarán correctamente ni podrán serajustados. Para ajustar el sendero, lo único quehay que hacer es, con la ayuda de un oscilosco-pio, comprobar que la señal de las cabezas devideo sea lo más plana posible; si se compruebaque no es así, habrá que mover las guías de en-trada o salida (según sea el caso).
Una vez que el sendero de la cinta está co-rrectamente ajustado, debe comprobarse que elcircuito servo esté recibiendo su alimentacióncorrespondiente (por lo general 5 volts) y la se-ñal de referencia externa de 3.58 MHz (señal parala correcta sincronía vertical). También es pre-
PG
3.58MHzB+
FG
Drive Servo controlM
Servo de DrumFigura 4

67ELECTRONICA y servicio No.24
ciso asegurarnos que cada motor (capstan ydrum) reciba sus señales mínimas de funciona-miento: 12 volts, nivel de tierra, terminal de vol-taje de error y –en el caso específico del motorde capstan– terminal adicional de adelante/atrás.
Caso 1Cuando no exista la alimentación de 12 volts,ninguno de los motores girará; esto significa quehay un problema en la fuente de alimentación oque hay un corto en alguno de los circuitos dri-ver; a fin de determinar con exactitud el origendel problema, debemos aislar la fuente de ali-mentación para verificar si todo proviene de ellao si existe un corto en alguno de los elementosde carga. Si se comprueba que la fuente trabajade manera normal, será necesario ir desconec-tando, uno por uno, los circuitos que reciben ali-mentación de la línea de 12 volts; sólo así esta-remos en posibilidad de saber cuál es el que estáprovocando el corto, y de hacer la sustitucióncorrespondiente.
Caso 2Si el problema consiste en que no hay voltaje deerror hacia alguno de los motores, pruebe des-conectando la línea de voltaje de error y conec-te en su lugar una fuente de alimentación varia-ble; para ello, asegúrese de conectar el polonegativo de la fuente de alimentación variableen la línea marcada como GND en el circuito dela videograbadora, y el polo positivo de la mis-ma en la línea marcada como voltaje de error(figura 5).
A manera de prueba, empiece ahora a aplicar2.5 volts y luego vaya modificando ligeramenteeste nivel de voltaje. En respuesta, normalmen-te el motor comenzará a girar e irá cambiando
la velocidad con que lo hace; si así sucede, ha-bremos comprobado que el motor en cuestiónfunciona correctamente y que existe una fallaen el circuito servo. Pero si el motor no respon-de en la forma señalada, quiere decir que elmotor o el circuito drive no sirven.
Caso 3Cuando no existe la señal de 3.58 MHz que sirvepara la correcta sincronía vertical, el circuitoservo no puede comparar la señal de velocidadcon la señal de fase de giro del motor en cues-tión (de capstan o de drum); por consiguiente,no se podrá controlar ni la velocidad ni la fasede giro del mismo.
Una vez que el motor (de drum o de capstan)ha girado, es momento de comprobar medianteosciloscopio que las señales de PG y FG (para elcaso del servomecanismo de drum) estén pre-sentes (figura 6). La ausencia de una u otra, pro-vocará que el servomecanismo no funcione ade-cuadamente; luego de determinarse cuál es laque falta, habrá que verificar el estado del sensor
Drive Servo controlM
Desconecte la línea de error y aplique 2.5 volts conuna fuente de alimentación externa.
2.5+ -
Señal FG
Señal PGFigura 5
Figura 6
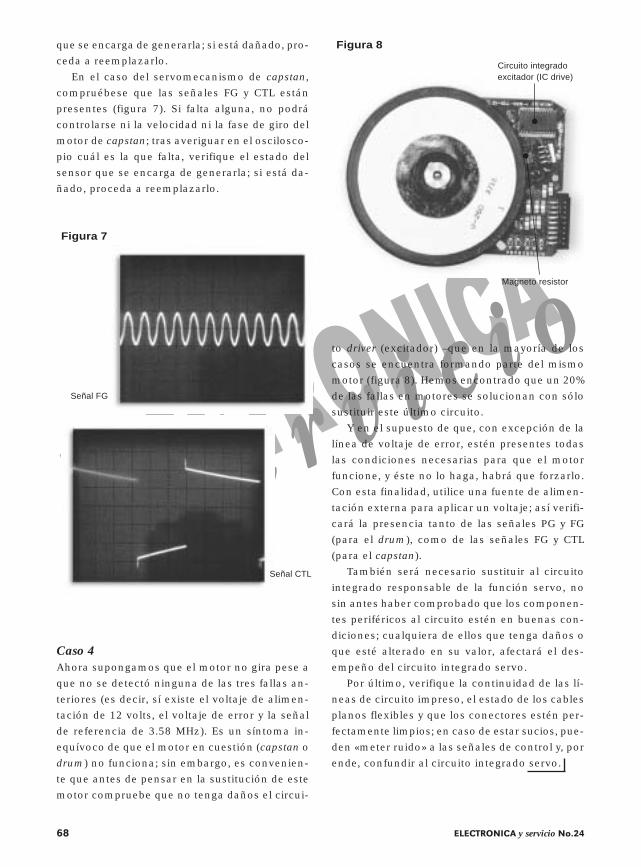
68 ELECTRONICA y servicio No.24
que se encarga de generarla; si está dañado, pro-ceda a reemplazarlo.
En el caso del servomecanismo de capstan,compruébese que las señales FG y CTL estánpresentes (figura 7). Si falta alguna, no podrácontrolarse ni la velocidad ni la fase de giro delmotor de capstan; tras averiguar en el oscilosco-pio cuál es la que falta, verifique el estado delsensor que se encarga de generarla; si está da-ñado, proceda a reemplazarlo.
Caso 4Ahora supongamos que el motor no gira pese aque no se detectó ninguna de las tres fallas an-teriores (es decir, sí existe el voltaje de alimen-tación de 12 volts, el voltaje de error y la señalde referencia de 3.58 MHz). Es un síntoma in-equívoco de que el motor en cuestión (capstan odrum) no funciona; sin embargo, es convenien-te que antes de pensar en la sustitución de estemotor compruebe que no tenga daños el circui-
Señal FG
Señal CTL
Circuito integradoexcitador (IC drive)
Magneto resistor
Figura 7
Figura 8
to driver (excitador) –que en la mayoría de loscasos se encuentra formando parte del mismomotor (figura 8). Hemos encontrado que un 20%de las fallas en motores se solucionan con sólosustituir este último circuito.
Y en el supuesto de que, con excepción de lalínea de voltaje de error, estén presentes todaslas condiciones necesarias para que el motorfuncione, y éste no lo haga, habrá que forzarlo.Con esta finalidad, utilice una fuente de alimen-tación externa para aplicar un voltaje; así verifi-cará la presencia tanto de las señales PG y FG(para el drum), como de las señales FG y CTL(para el capstan).
También será necesario sustituir al circuitointegrado responsable de la función servo, nosin antes haber comprobado que los componen-tes periféricos al circuito estén en buenas con-diciones; cualquiera de ellos que tenga daños oque esté alterado en su valor, afectará el des-empeño del circuito integrado servo.
Por último, verifique la continuidad de las lí-neas de circuito impreso, el estado de los cablesplanos flexibles y que los conectores estén per-fectamente limpios; en caso de estar sucios, pue-den «meter ruido» a las señales de control y, porende, confundir al circuito integrado servo.


70 ELECTRONICA y servicio No.24
INTRODUCCION A
LOS MICROCONTRO-
LADORES PIC
Primera de dos partes
INTRODUCCION A
LOS MICROCONTRO-
LADORES PIC
Primera de dos partes
Leopoldo Parra Reynada
La electrónica de control ha sufridouna verdadera revolución a partir del
surgimiento de losmicroprocesadores, pues éstos
permiten a los diseñadores construircircuitos flexibles y adaptables, de
bajo costo y mayor confiabilidad quesus antecesores de aplicación fija. Eneste artículo, dividido en dos partes,
haremos una introducción a unaclase de estos dispositivos que está
teniendo un gran éxito entre losdiseñadores, dado su bajo costo y su
fácil aplicación.
La ingeniería de control
Casi desde que comenzaron a desarrollarse losprimeros mecanismos complejos en la industria,la necesidad de emplearlos con mayor eficien-cia obligó a diseñar dispositivos de control es-peciales. Uno de los primeros fue un ingeniosomecanismo que permitía controlar la velocidadde funcionamiento de una máquina de vapor; enla figura 1 se muestra un diagrama de este apa-rato. Observe que se trata de un sistema que estámecánicamente conectado al eje de rotación dela máquina de vapor, y que cuando ésta funcio-na a cierta velocidad las esferas que se locali-zan en los extremos de los “brazos” comienzana girar y, por la fuerza centrífuga generada, tra-tan de separarse entre sí.
Con este movimiento, y gracias a una confi-guración tipo pantógrafo, se hace que un disco

71ELECTRONICA y servicio No.24
Entrada de vapor caliente
Varilla para escapede vapor
Cilindro y pistónde vapor
Salida de vapor
Biela
Eje de giro
RuedaimpulsoraEngranes 90˚
Control de velocidadtipo pantógrafo
Figura 1
Metal 1
Metal 2
Termopar enestado de reposo
Termopar al quese ha aplicado calor
Termopar al quese ha aplicado frío
Figura 2
de control comience a subir; a su vez, esto pro-voca que una varilla suba conforme aumenta lavelocidad. Esta varilla se encuentra directamenteconectada al depósito de vapor que impulsa alcilindro; y cuando la velocidad de giro llega alvalor deseado, a través de una ranura que lavarilla tiene se fuga una pequeña cantidad devapor; esto evita que aumente la presión de gasen el cilindro, y que, por consiguiente la máqui-na trabaje más rápido. El problema de este re-curso es que era mecánico; de modo que si re-pentinamente se necesitaba que la máquinafuncionara a una velocidad diferente, era nece-sario modificar físicamente el mecanismo decontrol para que se adaptara a los nuevos re-querimientos.
Sin embargo, con este simple mecanismopodemos averiguar cuáles son las partes bási-cas de todo sistema de control: en primer lugar,debe tomarse alguna referencia del parámetroque se desea manejar (en este caso, la veloci-dad de giro); esta muestra entra a un dispositivode comparación (las esferas centrífugas), mis-mo que, cuando detecta que se ha rebasado ellímite establecido, efectúa su función de control(mediante la varilla calibrada). Todos estos pa-sos deben cumplirse de forma rigurosa, indepen-dientemente de que el sistema de control seamecánico, electrónico, digital o de cualquier otrotipo.
Otro ejemplo de sistema mecánico
Veamos otro ejemplo de sistema de control tra-dicional: el control de temperatura dentro de unrefrigerador común. Para comprender su funcio-namiento, simplemente recuerde el comporta-miento normal de los metales: cuando se enfrían,su longitud se reduce ligeramente; y cuando secalientan, sufren una leve expansión. Aprove-chando este fenómeno, se diseñó un sistema decontrol sumamente eficiente, que de hecho sesigue empleando en todos los refrigeradores queno sean electrónicos.
El núcleo del sistema de control es un dispo-sitivo llamado “termopar”, el cual está construi-do con dos metales que difieren en su coeficien-

72 ELECTRONICA y servicio No.24
te de expansión; esto significa que en estado dereposo, el termopar está perfectamente recto;mas al aplicarse calor o frío, y debido a la dife-rencia en la expansión de los dos metales, co-mienza a presentar una curvatura (figura 2). Estacaracterística se aprovecha para conectar elmotor eléctrico que impulsa a la compresora delrefrigerador; para el efecto, simplemente seadapta un interruptor de contacto que al detec-tar que el termopar ha alcanzado una tempera-tura por encima del límite establecido, cierra loscontactos y pone a funcionar el sistema enfria-dor (figura 3); conforme se consigue la baja tem-peratura dentro del refrigerador, el termoparcambia de forma y abre los contactos; con ello,impide al mismo tiempo que el aparato se enfríede más.
Como ha podido apreciar, este sistema es muyingenioso y eficiente, a prueba de fallas y de vidaútil prácticamente ilimitada; cuando mucho, cadacierto periodo de años habría que limpiar loscontactos eléctricos; de no ser por esto, no senecesita ningún mantenimiento adicional. Noobstante, también podemos observar sus limi-taciones: por ejemplo, si después de un tiempono quisiéramos utilizar este dispositivo para con-trolar la temperatura de refrigeradores sino lade hornos, tendríamos que rediseñarlo mecáni-camente.
Los primeros controleselectrónicos analógicos
Desde que se comenzaron a desarrollar los cir-cuitos electrónicos, se contempló la posibilidadde utilizarlos en labores de control; por ejem-plo, se contemplaba la posibilidad de emplear laelectrónica para controlar parámetros cruzados,como podría ser la velocidad de giro de un mo-tor dependiendo de la temperatura de un proce-so u otras cosas por el estilo. Pero durante losprimeros años de los controles electrónicos,prácticamente había que diseñar un sistema decontrol exclusivo para el parámetro en cuestión;veamos un ejemplo sencillo.
Supongamos que se desea controlar la tem-peratura de un cierto equipo, pero ahora em-pleando métodos electrónicos; para lograrlo,sólo hay que colocar un dispositivo sensor detemperatura (normalmente un termistor –dispo-sitivo electrónico cuya resistencia interna varíade acuerdo con la temperatura ambiente–) de talforma que, dependiendo de la temperatura quese le aplique, produzca un voltaje variable (figu-ra 4). Este voltaje se introduce a un par de com-paradores, uno de los cuales pone a funcionarun calentador y el otro un enfriador (figura 5);luego se calibran perfectamente los comparado-res, de modo que entre ambos quede la tempe-ratura a la que debe funcionar normalmente elequipo que deseamos controlar.
Usted advertirá de inmediato que construireste tipo de controles resulta muy sencillo; peroeste ejemplo resulta engañosamente simple ypuede hacernos pensar que todos los controlesde procesos industriales son poco complejos yde fácil construcción; en realidad se requiere una
Compresora
Motor eléctrico
Control deenfriamiento
Contactos eléctricos
Termopar
ACM
El control de temperatura de un refrigerador funciona asi: el termopar normalmente está frío, y la curvatura impide que se cierren los contactos eléctricos. Cuando el refrigerador se "calienta" lo suficiente, el termopar pierde curvatura y hace que los contactos se cierren, haciendo funcionar el motor, la compresora, y enfriando el sistema, lo que vuelve a enfriar el termopar y queda todo en condiciones iniciales.
Figura 3
Voltaje dealimentación
Voltaje desalida
R
TH
Conectando un termistorcomo se muestra, en la salidatendremos un voltaje quevaría dependiendo de latemperatura ambiente.
Figura 4

73ELECTRONICA y servicio No.24
gran cantidad de elementos cuidadosamentecalculados para que funcionen dentro deparámetros muy estrictos. De cualquier forma,el ejemplo nos sirve para demostrar lo siguien-te: supongamos que por alguna causa se deseacambiar la temperatura de operación de nues-tro equipo; dado que esto implica la modifica-ción del sistema de control, habría que hacer unaserie de cálculos para encontrar los nuevos um-brales de voltaje que emplearán los comparado-res con el propósito de disparar sus elementosde control; a su vez, esto amerita la manipula-ción física del circuito de control (lo cual puedeconsistir en un simple reemplazo de dos resis-tencias o en la sustitución de todo el circuito).
Si piensa usted que cambiar un comparadorcon un par de resistencias no es costoso, recuer-de que cuando se trata de controles industrialeslas piezas suelen ser muy costosas y difíciles deconseguir; así, la construcción de un sistema decontrol dedicado exclusivamente a ciertoparámetro es una alternativa efectiva sólo a cortoplazo que, por tal motivo, resta flexibilidad alsistema en su conjunto.
Pero esto no es todo: cuando apenas se estáponiendo a punto un sistema de control, se tie-nen que realizar múltiples pruebas de ensayo-error, hasta conseguir una operación estable ydentro de los parámetros esperados; y si paracada cambio que se quiera hacer en el compor-tamiento del equipo se tiene que diseñar, calcu-lar y construir un circuito exclusivo, el procesose vuelve extremadamente lento y costoso. Lo
mismo puede decirse si, por ejemplo, una plan-ta que ya está funcionando perfectamente consus controles tradicionales, necesita hacer uncambio en su línea de producción.
Ante estos problemas, se ha recurrido a unnuevo dispositivo que fue diseñado a principiosde los años 70 del siglo pasado: nos referimos almicroprocesador.
El microprocesador
¿Cuál es la característica que hace tan especiala los microprocesadores? Su flexibilidad y capa-cidad para adaptarse a diversos requerimientos.Recordemos cómo surgieron los microprocesa-dores: la compañía japonesa Busicom encomen-dó a Intel el diseño de los circuitos integradosque serían núcleo de doce nuevos modelos decalculadoras electrónicas; cuando los ingenie-ros advirtieron que no tendrían tiempo suficien-te para diseñar doce dispositivos diferentes, de-cidieron aprovechar el hecho de que lasoperaciones básicas de todos los modelos eranlas mismas. Gracias a ello, pudieron construirun circuito que fue el “cerebro” común de todaslas calculadoras y colocar en memoria ROM sólolas particularidades de cada modelo.
Precisamente, ese núcleo común fue el pri-mer microprocesador conocido en el mundo: elcélebre Intel 4004 (figura 6). Este circuito se con-virtió en un éxito inmediato, en cuanto salió a laventa al público.
V
Voltaje umbral 1
Relevador Calefactor
TH
Voltajeumbral 2
+
-
-
+
Relevador Aireacondicionado
Figura 5
El Intel 4004 fueel primermicroprocesadorcomercial en elmundo.
Figura 6

74 ELECTRONICA y servicio No.24
Pronto comenzaron a explotarse otras carac-terísticas de este dispositivo, que originalmentese había diseñado para hacer sumas y restas;específicamente funciones de control sencillas.Esta tendencia se vio reforzada con la apariciónde microprocesadores cada vez más poderosos;tal es el caso del 8008, y el del que realmentefue la punta de lanza para la popularidad de loscontroles basados en microprocesador: el 8080y sus circuitos rivales (como el Z-80 de Zilog, el6502 de MOS-Technologies o el MC6800 deMotorola, figura 7). Tan exitosos fueron estos dis-positivos, que sirvieron como base para el sur-gimiento de las primeras computadoras perso-nales: la Apple-II y la célebre Commodore-64,que para muchas personas en el mundo consti-tuyeron el primer contacto con la informática.
Estructura internaEn realidad, la estructura general de un micro-procesador es muy simple (figura 8); puede verque se trata tan sólo de una serie de registros deentrada y salida de datos, que es donde se intro-ducen los parámetros con que se desea traba-jar; estos registros están conectados a una “uni-dad aritmética-lógica” (ALU), en la cual se llevana cabo las operaciones indicadas por el usuario;una vez realizadas las operaciones, la ALU en-vía nuevamente los datos a los registros, paraque de ahí puedan viajar por los buses de datos,direcciones y control hasta finalmente efectuarla labor deseada.
Todos estos pasos secuenciales se manejanpor medio de un circuito de control de memoria,y todo el conjunto queda bajo la supervisión deun circuito temporizador o timer. Gracias a estaarquitectura tan sencilla, el microprocesador esuna herramienta extremadamente flexible; y esque por sí mismo, no puede hacer prácticamentenada; pero dependiendo de las órdenes que sele proporcionen, puede ejecutar cálculos muy com-plejos en tiempos extraordinariamente cortos.
Por otra parte, cabe señalar que pese a la enor-me flexibilidad que implicaba la presencia de unmicroprocesador encargado de labores de con-trol, aún había ciertos inconvenientes que difi-cultaban su aplicación masiva. Por ejemplo,como ya dijimos, un microprocesador por sí solono sirve de nada; a fin de que esto quede másclaro, puede decirse que el dispositivo equivalea un cerebro humano aislado, sin brazos ni pier-
VSS
XTAL1
EXTAL 2
NM1
IRO1
RESET
VCC
P20
P21
P22
P23
P24
P10
P11
P12
P13
P14
P15
P16
P17
FN SUFFIXPLCC 44
P SUFFIXPLASTIC PACKAGE
CB-182
CASES
40
CB-521
PIN ASSIGNMENT
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
E
SC1
SC2
P30
P31
P32
P33
P34
P35
P36
P37
P40
P41
P42
P43
P44
P45
P46
P47
VCC
Slandow
Fragmento de una hoja de datos del microprocesador 6801, miembro de la familia del MC6800.
Figura 7Bus I/O
Registros
Timer
UnidadAritmético
lógica
Control dedirecciones de memoria
Figura 8

75ELECTRONICA y servicio No.24
nas para actuar, ni sentidos que le indiquen lascondiciones externas.
Para que un microprocesador pueda funcio-nar adecuadamente, es necesario rodearlo deelementos auxiliares que lo apoyen en su laborde cálculo (figura 9). Específicamente, hay quecolocar una serie de puertos de entrada y salidade información; un reloj que alimente al timer;una memoria donde se guarden las instruccio-nes y los datos para que trabaje el sistema; unoscircuitos actuadores que permitan a éste modi-ficar algún parámetro externo (recuerde que es-tamos hablando de aplicaciones de control);unos convertidores de análogo a digital –y vice-versa– para introducir variables analógicas delmundo real, procesarlas en forma digital y expe-dir sus resultados también de forma análoga; etc.
Ahora bien, gracias a los avances en las téc-nicas de miniaturización de circuitos integrados,algunos fabricantes decidieron facilitar la tareade diseño de circuitos de control a los ingenie-ros; con este propósito, en el encapsulado delmicroprocesador introdujeron casi todo lo ne-cesario para llevar a cabo tareas de control sen-
cillas. A este nuevo tipo de dispositivos se lesdio el nombre de “microcontroladores”.
Los microcontroladores
Podemos decir que un microcontrolador es unmicroprocesador al que se le han añadido todoslos elementos indispensables para que realicesus labores de cálculo, sin necesidad de auxilia-res externos. En la figura 10 se muestra el diagra-
Bus I/O
Puertossalida
Actuadores
ConvertidorD/A
Convertidor A/DPuertos entrada
Sensores
Microprocesador
RST
CLK
Memoria
Figura 9
IndexRegister
PC0PC1PC2PC3PC4PC5PC6PC7
PA0PA1PA2PA3PA4PA5PA6PA7
PB5PB6PB7
PortCI/0
Lines
PortC
Reg
DataDir
Reg
RESET
IRC
OSC1 OSC2
Oscilatorand +2
PD7/TCAP
PD5Port D
CPUControl
CPU
ALU
Accumulator
ConditionCode Register
StackPointer
ProgramCounter High
ProgramCounter Low
DataDir
Reg
PorA
Reg
DataDir
Reg
PortB
Reg
PortBI/0
Lines
PortAI/0
Lines
InternalProcessor
ClockTimer
System
TEMP
128 X BStaticRAM
2112 X BROM
240 X BSeif Check ROM
Diagrama a bloques interno de un microcontrolador 6805 típico. Note que posee todo lo necesario para llevar a cabo labores de control de cierta complejidad.
Figura 10

76 ELECTRONICA y servicio No.24
ma a bloques de uno de estos dispositivos; ob-serve que en su centro hay un microprocesadorcompleto, con sus registros, ALU, control dememoria, timer, etc.; y en su alrededor, encon-tramos módulos de ROM y RAM, puertos I/O,interfaces para la comunicación con otros siste-mas, convertidores A/D y D/A (y, en general,todo lo necesario para efectuar labores de con-trol sin necesidad de elementos externos o conun mínimo soporte).
Todo esto se introduce en un encapsuladosencillo (que puede ir desde una pastilla tipo DIP-8 hasta circuitos con varias decenas e inclusocientos de terminales de entrada y salida, figura11), de modo que el usuario prácticamente sólotenga que ser cuidadoso en el cálculo de las ins-trucciones y los datos que suministrará a sumicrocontrolador, en la introducción de su me-moria ROM y RAM, y en la forma de conectar eldispositivo a los elementos que desea controlar(relevadores, acopladores ópticos, luces de ad-vertencia, etc.) De esta manera, ya no tiene queocuparse en la colocación de la memoria exter-na, los puertos de entrada y salida de datos uotras cosas por el estilo; todo viene incluido enel microcontrolador.
Como es obvio, tal aproximación fue un éxitoinmediato entre los diseñadores de circuitos decontrol, mismos que empezaron a aplicar losmicrocontroladores de manera generalizada. Secalcula que por cada microprocesador “comple-jo” que hoy se vende (o sea, cada dispositivo
empleado para impulsar una computadora mo-derna), se venden cientos de microcontrolado-res sencillos. Podemos encontrar microcontro-ladores en el televisor, la videograbadora, elreproductor de discos compactos, el control re-moto, las alarmas automotrices, el sistema deignición de un automóvil, los refrigeradores yacondicionadores de aire modernos, las calcu-ladoras, los relojes digitales, las tarjetas telefó-nicas, etc.; y no se diga en procesos industria-les, en donde han venido a revolucionar porcompleto la forma de controlar las plantasfabriles de nuestros días.
Los microcontroladores no sólo se han vuel-to más poderosos; gracias a su masificación,ahora también es posible adquirirlos a preciosrealmente sorprendentes; por supuesto, esto loshace ideales para múltiples aplicaciones (de he-cho, en ingeniería circula un dicho muy conoci-do: “si un circuito digital requiere más de quinceintegrados sencillos para su construcción, me-jor cámbialos por un solo microcontrolador”). Sinembargo, aplicar un microcontrolador no es tansencillo como parece; se requiere una buenabase de conocimientos para poder aprovechar-lo a plenitud.
Familias de microcontroladoresmás comunes
Para finalizar la primera parte de este artículo,queremos especificar las características de dos
CASE 607CERAMIC
SUFFIX: MECL.F
CASE 620CERAMIC
SUFFIX: MECL.LTTL/HCMOS-JSTD CMOS-L
CASE 623CERAMIC
SUFFIX: TTL-JCMOS-L
CASE 648PLASTIC
SUFFIX: MECL-PTTL/HCMOS-NSTD CMOS-P
CASE 646PLASTIC
SUFFIX: MECL-PTTL/HCMOS-NSTD CMOS-P
CASE 632CERAMIC
SUFFIX: MECL-LTTL/HCMOS-JSTD CMOS-L
14
161
1
1
16
1
141
14
24
1
40
Los microcontroladores modernos vienen en una gran diversidad de encapsulados, desde los pequeños de ocho terminales hasta los muy grandes, con varios cientos de terminales.
Figura 11

77ELECTRONICA y servicio No.24
de las familias de microcontroladores que, porsu uso masivo y su poderío, han conquistado laconfianza de quienes se dedican al diseño decircuitos de control:
Microcontroladores MC68HCXXEsta familia de integrados de Motorola es unade las favoritas del público en general, debido aque combinan un gran poder de cálculo con unprecio moderado (además de que utilizan prác-ticamente el mismo conjunto de instruccionesdel microprocesador MC6800, que es muy co-nocido entre la comunidad ingenieril, figura 12).
Estos dispositivos vienen en una amplia va-riedad de subfamilias, como la 68HC05, la68HC11, la 68HC711, etc.; con ello, se busca sa-tisfacer la mayor cantidad posible de necesida-des que pudiera tener un diseñador de circuitosde control.
Microcontroladores PICSin duda, son los más empleados por aficiona-dos y diseñadores, ya que combinan un preciomuy bajo con un poderío suficiente para llevar acabo diversas labores: desde las muy sencillas(unas luces secuenciales), hasta las más com-plejas (por ejemplo, el control de una estaciónmeteorológica). Vea la figura 13.
La familia MC68HCXX de Motorola, en la actualidad gozade enorme popularidad, debido a que sus dispositivos sonpoderosos y relativamente económicos.
Figura 12La familia PIC de Microchip, por lo general es menospoderosa que la 68HCXX, pero su costo es mucho menor,por lo que se usa masivamente para aplicacionessencillas.
Figura 13
Los circuitos PIC se subdividen en una grancantidad de ramas, cada una con característicaspropias (las iremos viendo en detalle en sucesi-vos artículos). La compañía que los produce sellama "Microchip" (www.microchip.com).
De hecho, con estos microcontroladores po-demos armar circuitos que realicen labores muycomplejas, con apenas un par de integrados.
Naturalmente, éstas no son las únicas fami-lias de microcontroladores que existen en elmercado; también Intel, Zilog, NationalSemiconductor, Fujitsu, Hitachi y muchas otrascompañías, se dedican a producir microcontro-ladores para aplicaciones específicas (simple-mente recuerde los microcontroladores de Sony,que pueden encontrarse en múltiples marcas ymodelos de aparatos electrodomésticos). Perolas anteriores son quizá las más conocidas porel diseñador, y las que con mayor facilidad seconsiguen en las tiendas de electrónica. Por talmotivo, todo lo que de aquí en adelante veamoscon respecto a microcontroladores, estará ba-sado en estas dos familias; y enfatizaremos demanera especial la utilización de los PIC, por-que están causando verdadero furor entre losamantes de la electrónica.
Concluye en el próximo número


PROXIMO NUMERO
Abril 2000Ciencia y novedades tecnológicas
Perfil tecnológico• Las pantallas de plasma.
Leyes, dispositivos y circuitos• Análisis y prueba de semiconductores. Cuarta y última parte.
Qué es y cómo funciona• El reproductor YEPP de audio digital Samsung.
Servicio técnico• Primeros pasos en el servicio a videocámaras.• Casos de servicio en televisores Philips.• Ajuste de RF en sistemas de componentes de audio.• La fuente de alimentación en hornos de microondas
Panasonic.
Electrónica y computación• Introducción general a los microcontroladores PIC Segunda
y última parte.
Proyectos y laboratorio•Montaje de amplificador estéreo.
Diagrama
Búsquela consu distribuidorhabitual
La firma española Beta Instruments, ha desarrollado unamodalidad de instrumentación basada en la PC, mediantetarjetas y software especializado que expande las posibilidadesdel hardware dedicado. El software maestro es el BetaInstruments Manager, mediante el cual se controlan losinstrumentos susceptibles de ejecutarse con las diferentestarjetas producidas por Beta Instruments:
Osciloscopio de 40 MHz• Frecuencia de muestreo de 40 MHz• Ancho de banda de 40 MHz• Disparo por canal de entrada/software/externo• Amplificación de 20mV/div a 50V/div (± 4 div)• Base de tiempos del osciloscopio de 100ms/div a 50 ns/div• Ventana temporal del registrador de 1 seg. a 999 horas• Buffer de 8 Kmuestras• Resolución frecuencial del analizador de hasta 2 Hz.• Modelos disponibles: SCP 201-ISA (1 canal de entrada, bus
ISA) y SCP 202 ISA (2 canales de entrada, bus ISA).• Instrumentos activados por el Beta Instruments Manager:
osciloscopios, voltímetros, analizadores de espectros,registradores de señal, drivers.
SOFTWARE E INSTRUMENTACION VIRTUALSOFTWARE E INSTRUMENTACION VIRTUAL
PIDA INFORMES:Centro Japonés de Información Electrónica
Tels. 57•87•17•79 y 57•70•48•84
Generador de Señal Arbitraria• Frecuencia de síntesis de 40 MHz• Ancho de banda de 1 MHz• 1 canal de salida + canal de
sincronismo• Amplitud máxima de 10V• Modelos disponibles: FGN 11-ISA
(generador de funciones: senoidal,triangular, cuadrada; bus ISA) yAWG 11-ISA (generador de señalarbitraria, bus ISA).
• Instrumentos activados por el BetaInstruments Manager: generadorde funciones, generador de señal arbitraria (sólo AWG),drivers.
Puede descargar el Beta Instruments Manager del sitiowww.beta-instruments.comConsulte más caraterísticas


