gwolf and validar comparisons
DESCRIPTION
GWOLF and VALIDAR Comparisons. M. Kavaya & G. Koch NASA/LaRC D. Emmitt & S. Wood SWA Lidar Working Group Meeting Sedona, AZ 27-29 January 2004. Outline. NASA/LaRC’s Lidar Intercomparison Facility VALIDAR GWOLF VALIDAR intercomparisons Hard target experiments Cloud returns - PowerPoint PPT PresentationTRANSCRIPT
GWOLF and VALIDAR Comparisons
M. Kavaya & G. KochNASA/LaRC
D. Emmitt & S. WoodSWA
Lidar Working Group MeetingSedona, AZ
27-29 January 2004
Outline
• NASA/LaRC’s Lidar Intercomparison Facility
• VALIDAR
• GWOLF– VALIDAR intercomparisons– Hard target experiments– Cloud returns– Vertical motion

Lidar Intercomparison Facility (LIF)at
NASA Langley Research Center

Lidar Intercomparison Facility
Features:
• Inside NASA grounds • Paved parking lot for up to 4 lidar systems• Row of surveyed marks on parking lot with 32-foot spacing• Row of 4 target lights on tall structure with 32-foot spacing• Surveyed positions of lidars and targets allows for parallel alignment among the lidars• Target lights at 677-m range, and 6° elevation angle• Target lights atop poles allowing atmospheric data collection while aimed at lights• Utilities available including telephone, intercom, internet, and electrical power

VALIDAR & GWOLF at the Lidar Intercomparison Facility
LocationOf Target LightsBldg 1297R-B-Y-G

View Of Lidars From The Target Lights’ Location
LocationOf LidarsBldg 1159
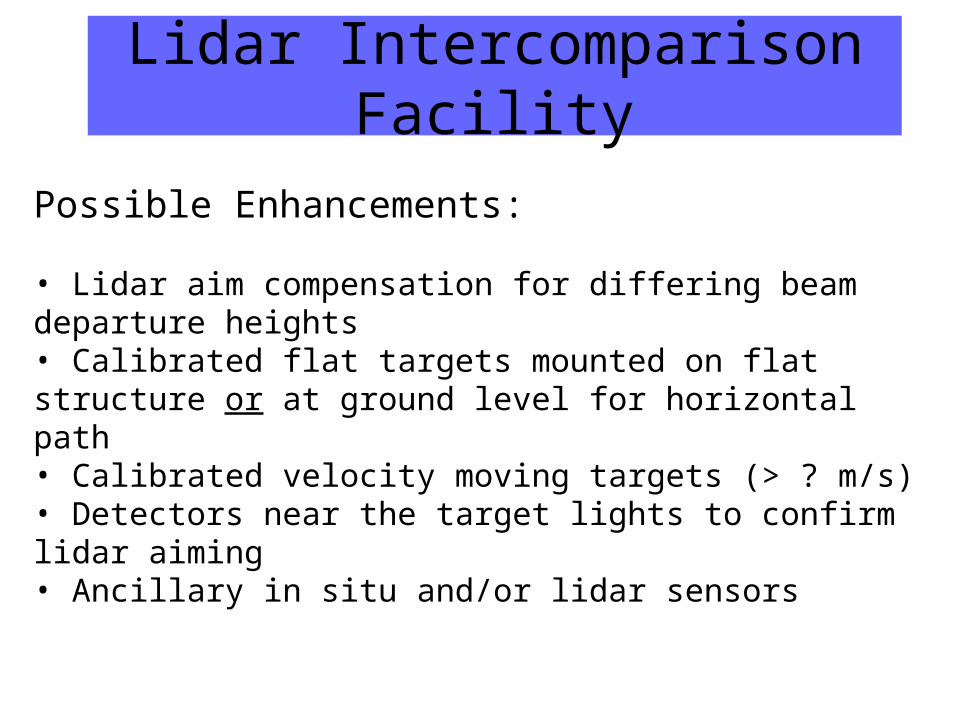
Lidar Intercomparison Facility
Possible Enhancements: • Lidar aim compensation for differing beam departure heights• Calibrated flat targets mounted on flat structure or at ground level for horizontal path• Calibrated velocity moving targets (> ? m/s)• Detectors near the target lights to confirm lidar aiming• Ancillary in situ and/or lidar sensors

Validar
Objectives:• Demonstrate advanced 2-m lidar components in a complete lidarsystem.• High-energy lasers, receiver optics, detectors, and electronics are being developed at LaRC from a variety of funding sources. Validarserves as a testbed for this development.• Make field measurements as required for validation.• FY ’04 Specifications are
- laser pulse energy = 100 mJ (78 mJ)- pulse repetition rate = 5 Hz (10 Hz)- pulse width = 150 ns- wavelength = 2053.5 nm

Lidar Specifications FY 02 FY 03 FY 04 (water cooled) (cond. cooled) (cond. cooled)
pulse energy 30 mJ 83 mJ (65 mJ) 100 mJ (78 mJ)
pulse rep. freq. 5 Hz 5 Hz (10 Hz) 5 Hz (10 Hz)
wavelength 2050.8 nm 2050.8 nm 2053.5 nm
pulse length 180 ns 150 ns 150 ns
spectrum single freq. single freq. single freq.

VALIDAR Trailer
LidarSystem
DataAnalysis
&VisitorsRooms
Validation Lidar Facility
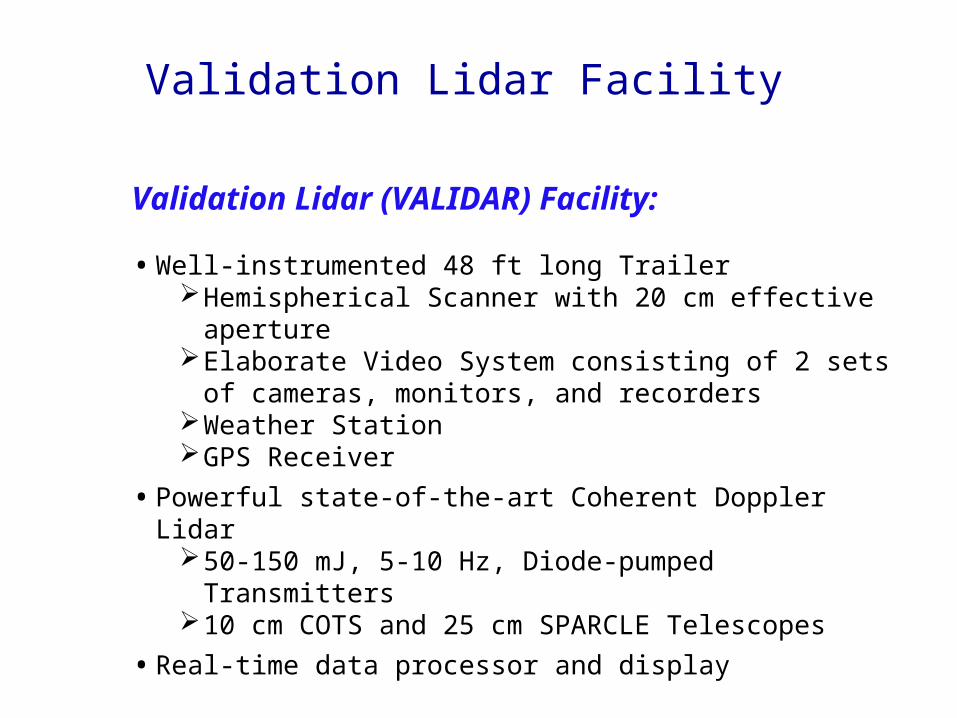
Validation Lidar (VALIDAR) Facility: • Well-instrumented 48 ft long Trailer
Hemispherical Scanner with 20 cm effective apertureElaborate Video System consisting of 2 sets of cameras,
monitors, and recorders Weather StationGPS Receiver
• Powerful state-of-the-art Coherent Doppler Lidar50-150 mJ, 5-10 Hz, Diode-pumped Transmitters10 cm COTS and 25 cm SPARCLE Telescopes
• Real-time data processor and display
Validation Lidar Facility
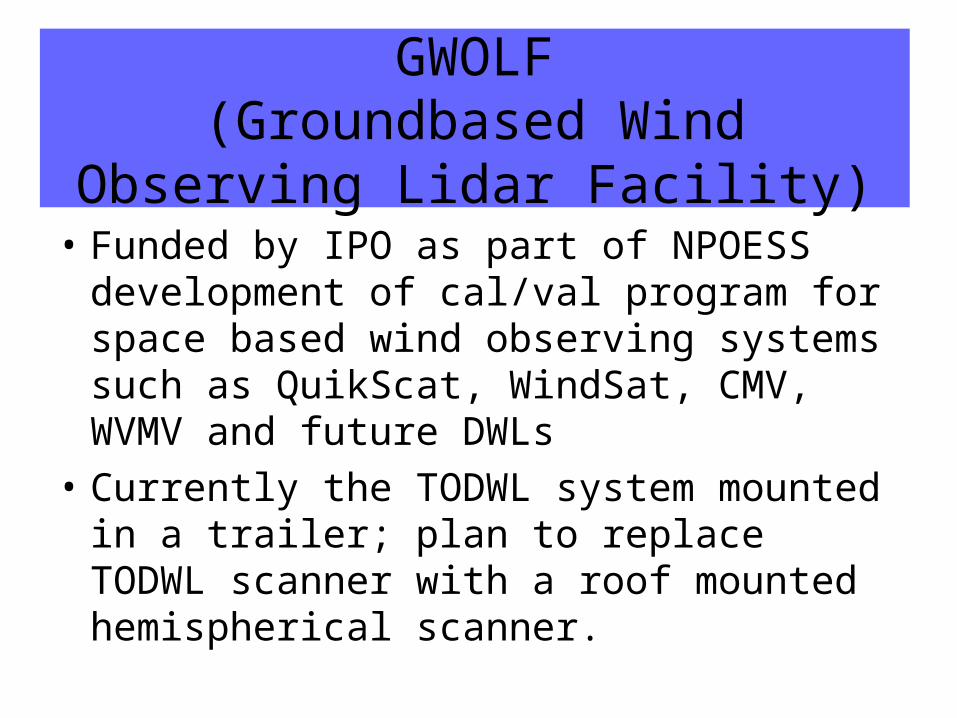
GWOLF(Groundbased Wind Observing Lidar
Facility)• Funded by IPO as part of NPOESS
development of cal/val program for space based wind observing systems such as QuikScat, WindSat, CMV, WVMV and future DWLs
• Currently the TODWL system mounted in a trailer; plan to replace TODWL scanner with a roof mounted hemispherical scanner.



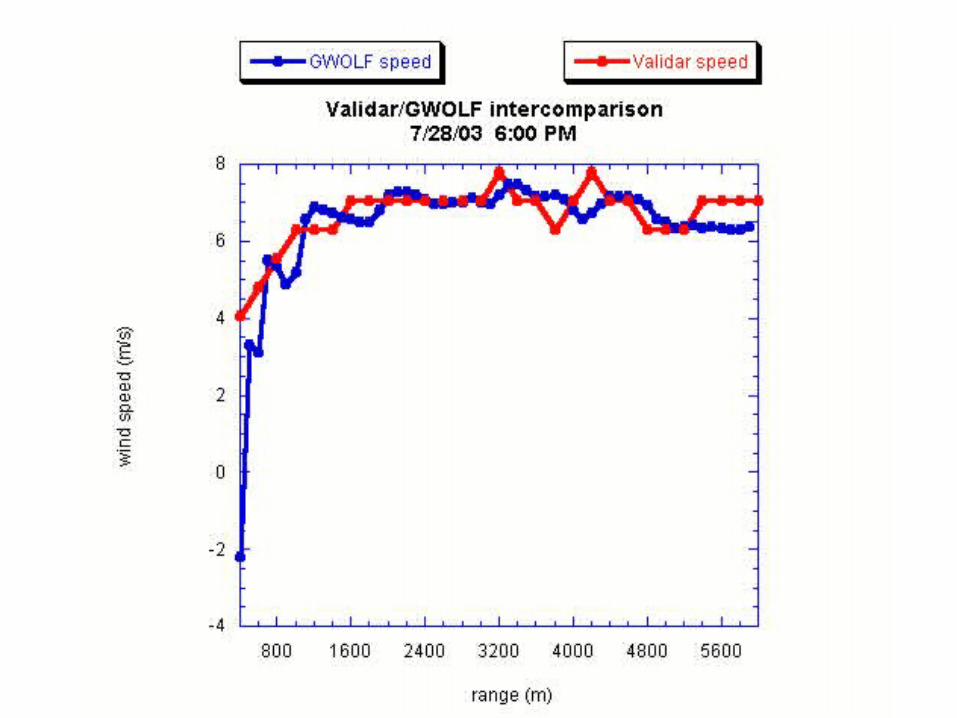
Validar/GWOLF Comparisons
• Performed at LaRC’s LIF
• Horizontal and vertical stares
• 200m resolution for Validar
• 1 minute averaging


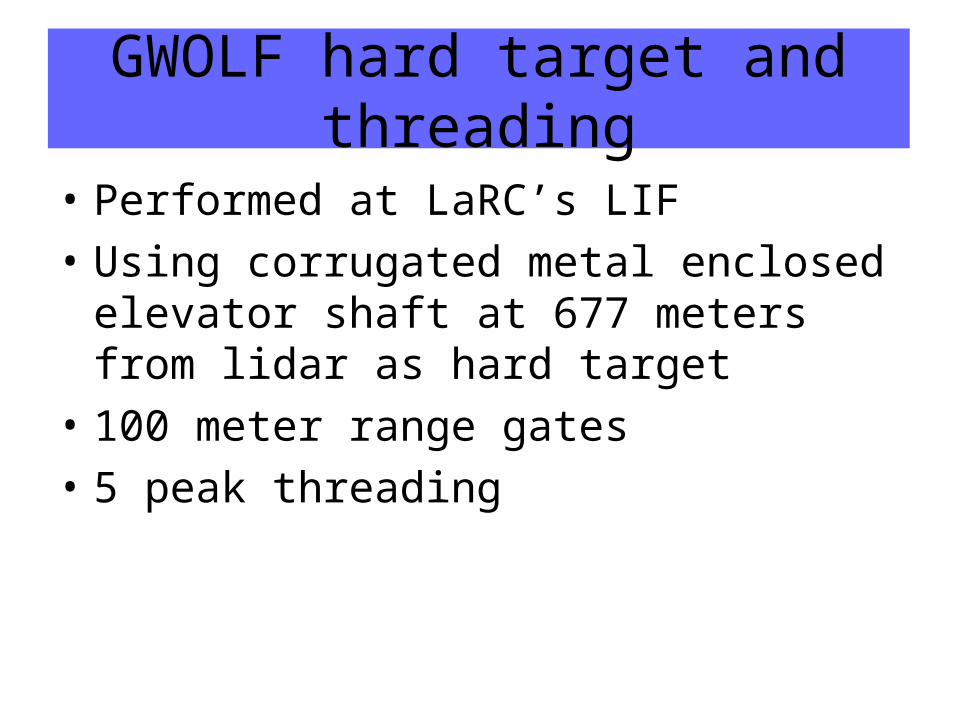
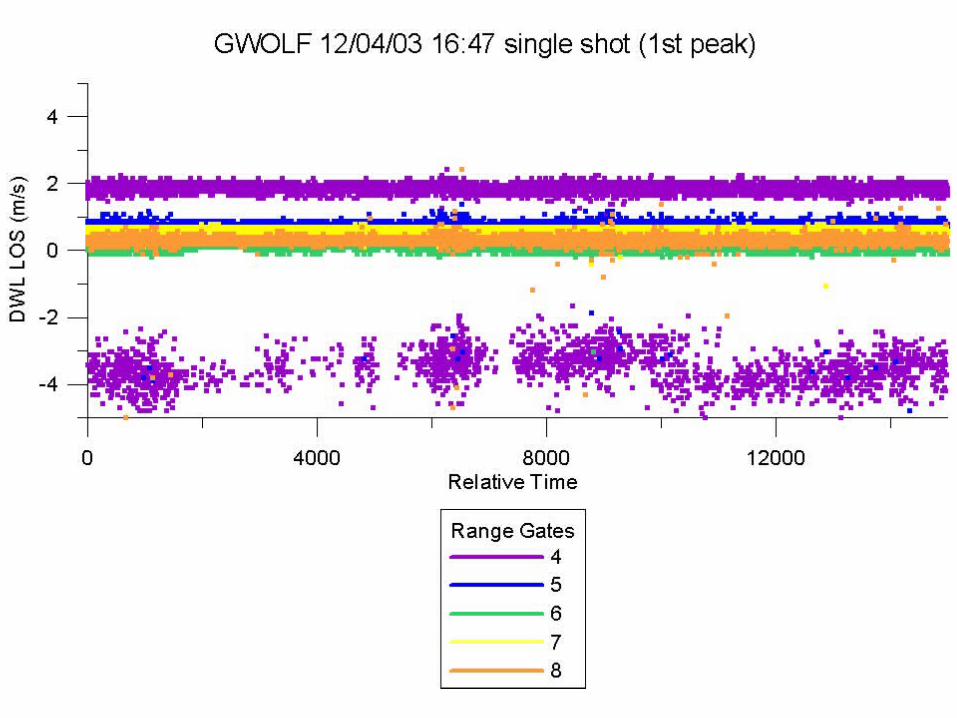
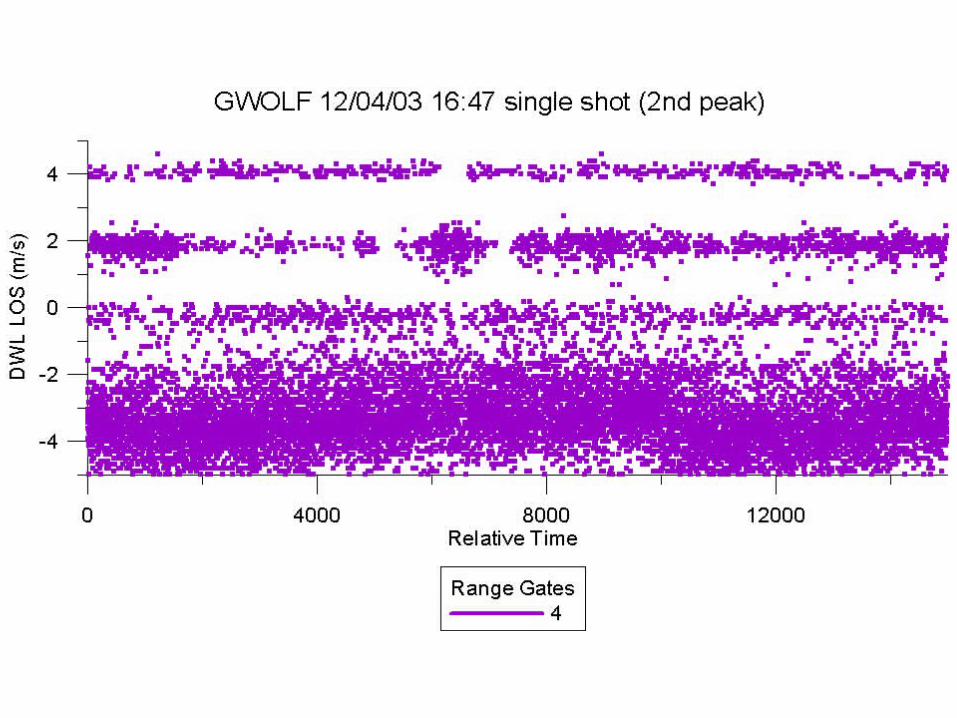
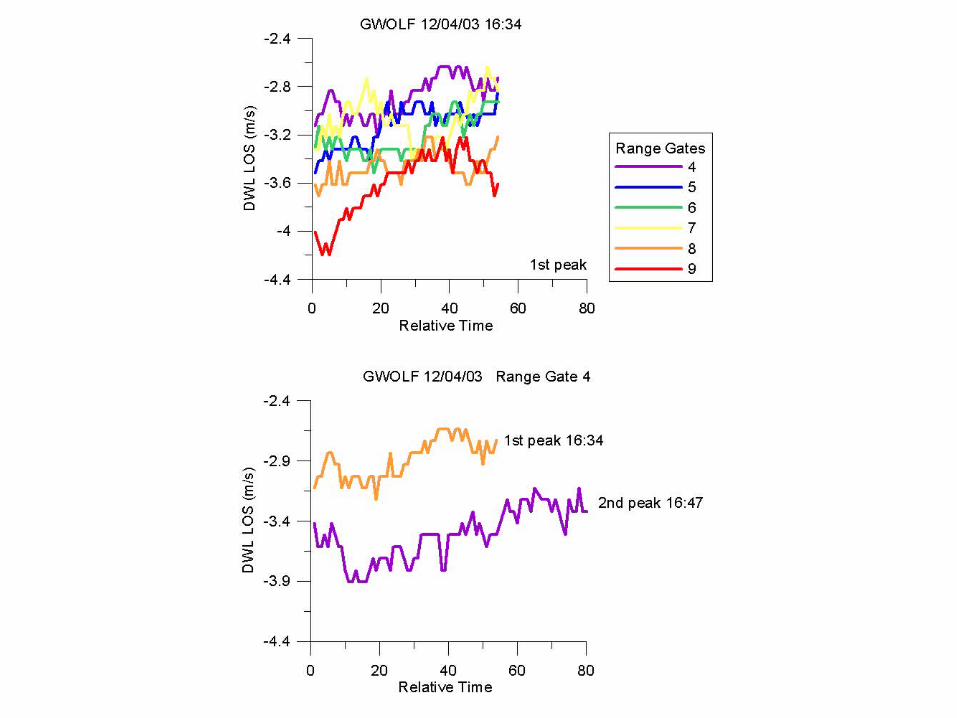
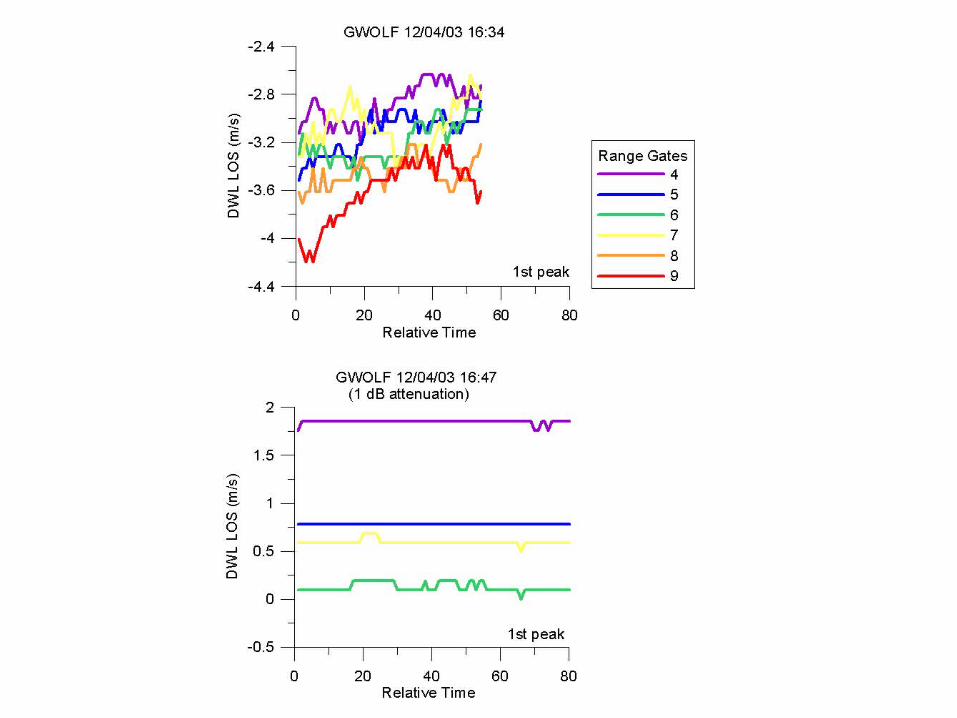
GWOLF hard target and threading
• Performed at LaRC’s LIF
• Using corrugated metal enclosed elevator shaft at 677 meters from lidar as hard target
• 100 meter range gates
• 5 peak threading


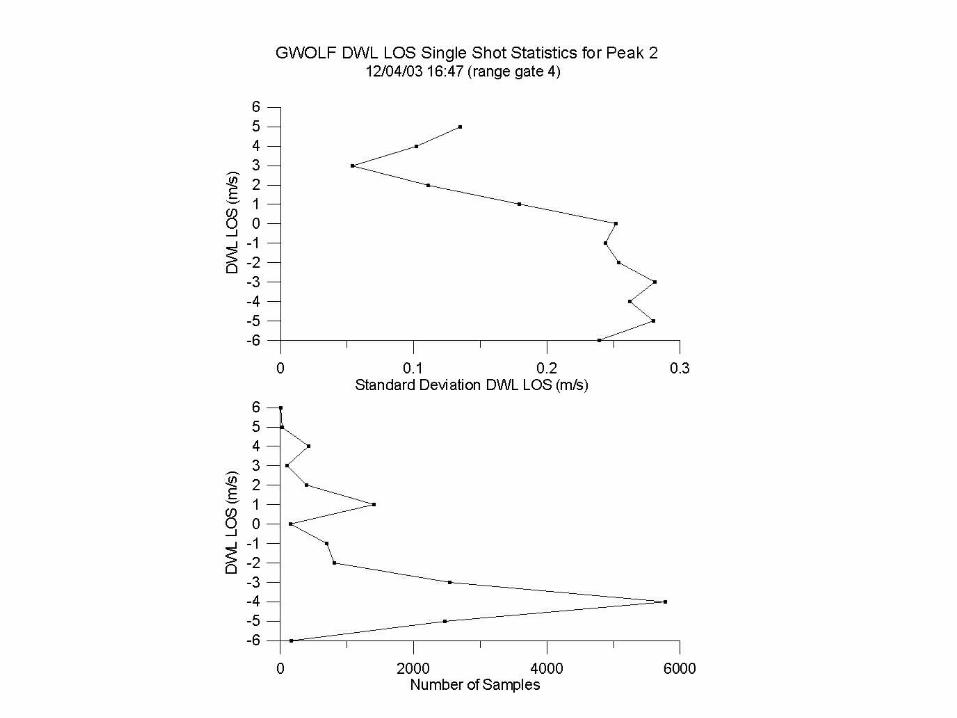

Cloud returns
• Performed at LaRC’s LIF
• Objective is to understand how to process and interpret GWOLF returns from cloud boundaries (large ~ 15 -20 dB backscatter gradients)

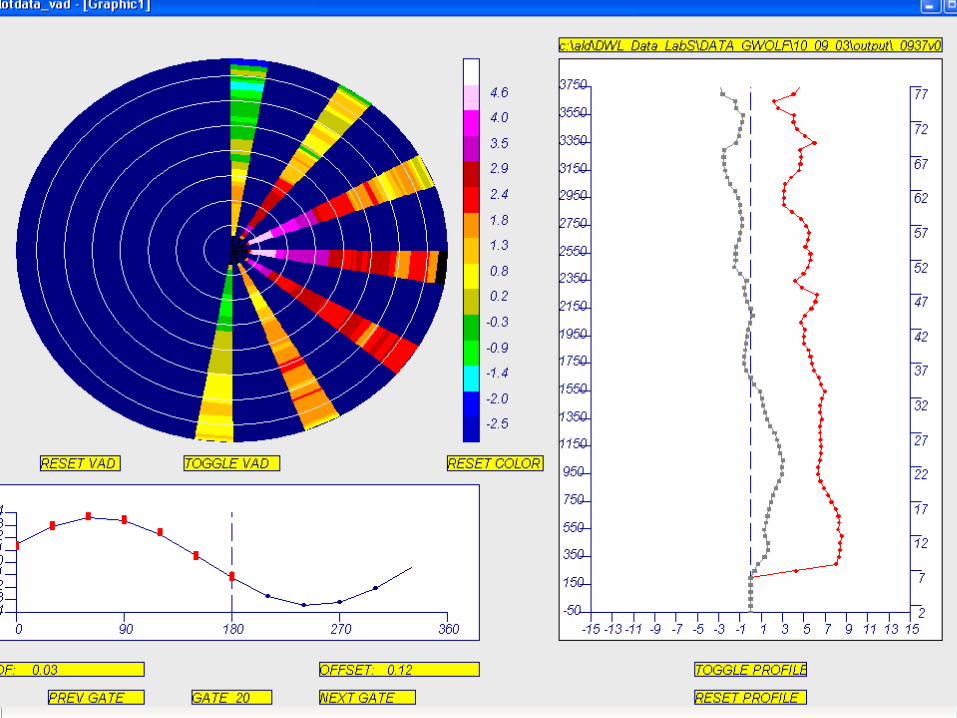


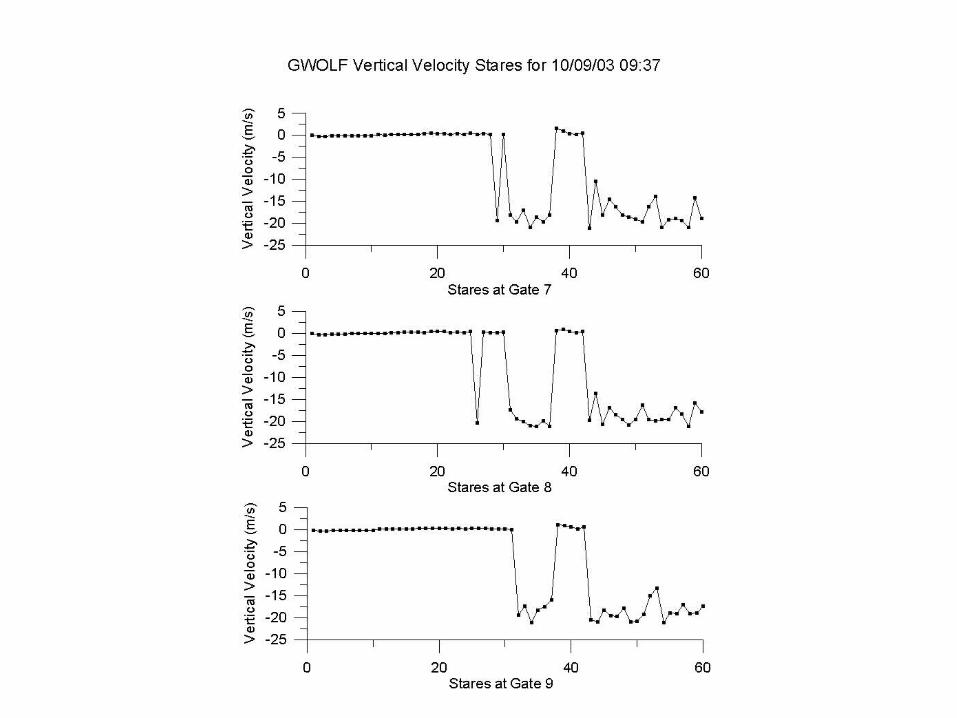
Vertical velocity from VADs
• Performed at LaRC’s LIF
• Question is “ How accurate and reliable is the estimate of the vertical velocity using the offset in the sine fit of a partial VAD”
• Interweaved a 25 second vertical stare into a 7 point partial VAD.


Summary
• The LaRC’s Lidar Intercomparison Facility enables long term, iterative evaluation of specific lidar performance issues.– Cloud boundary returns, hard target (ground
surrogate) returns, instrument stability and low SNR signal processing investigations
• Plan is to bring direct detection systems to LaRC for detailed investigations of both individual as well as hybrid wind sensing issues.
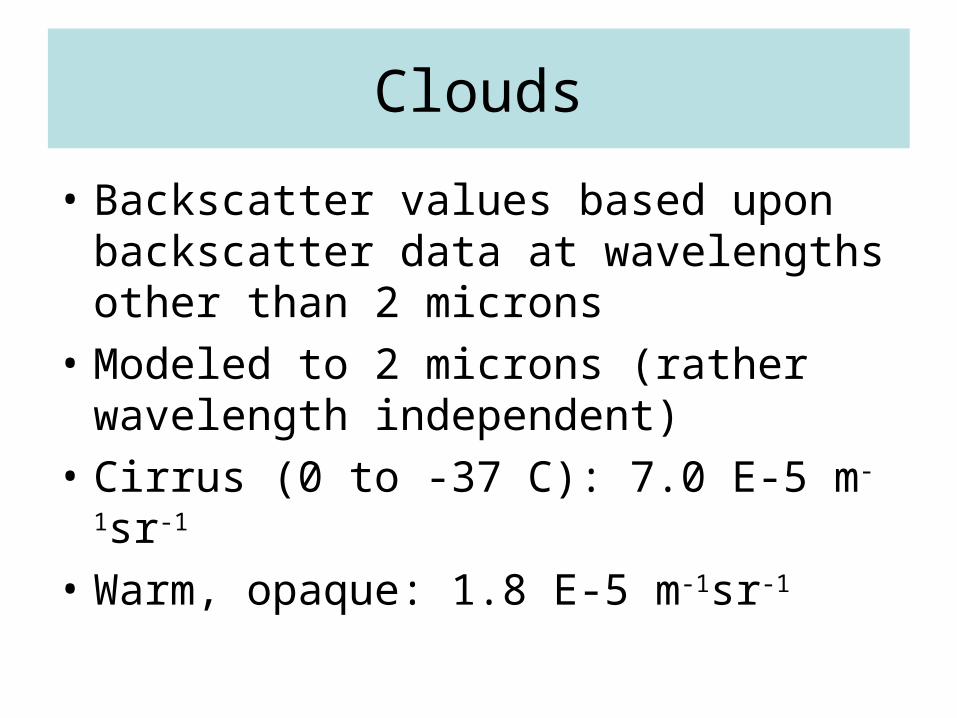
Clouds
• Backscatter values based upon backscatter data at wavelengths other than 2 microns
• Modeled to 2 microns (rather wavelength independent)
• Cirrus (0 to -37 C): 7.0 E-5 m-1sr-1
• Warm, opaque: 1.8 E-5 m-1sr-1

Per hard target calibration
Per current theory
TODWL 03

Cirrus at 5800 m agl

Lidar Design
telescopeλ/4
dual-balancedInGaAsphotodiodes
50/50 Coupler
Atmospheric Return
Outgoing pulse
Local Oscillatoracousto-opticmodulator
isolator
isolatorisolator
resonancedetector
Q-switch
Ho:Tm:YLFPZT
λ/2
λ/2
λ/2
λ/2
telescopeλ/4
dual-balancedInGaAsphotodiodes
50/50 Coupler
Atmospheric Return
Outgoing pulse
Local Oscillator
Atmospheric Return
Outgoing pulse
Local Oscillatoracousto-opticmodulator
isolator
isolatorisolator
resonancedetector
Q-switch
Ho:Tm:YLFPZT
λ/2
λ/2
λ/2
λ/2