http://vision.fe.uni-lj.si/ janez perš 1, marta bon 2, stanislav kovačič 1 1 faculty of...
TRANSCRIPT

http://vision.fe.uni-lj.si/
[email protected], [email protected], [email protected]
Janez Perš1 , Marta Bon2, Stanislav Kovačič1
1 Faculty of Electrical Engineering, University of Ljubljana, Slovenia1 Faculty of Sport, University of Ljubljana, Slovenia
Sixth Computer Vision Winter Workshop,
Bled, Slovenija, February 7-9 2001.
Errors and Mistakes Errors and Mistakes in Automated Playerin Automated PlayerTrackingTracking
OutlineOutline
• Introduction and motivation
• Sources and types of errors
• Tracking parameters
• Ground truth, experiments and results
• Conclusion

Introduction and motivationIntroduction and motivation
Automated player tracking system has been developed in our lab.
PLAYER TRACKING
SYSTEM
SUPERVISOR
How
accurate
is it?

Introduction and motivationIntroduction and motivation
Related work:
10 articles describing people/sport related tracking at ICPR 2000, Barcelona.
• 8 did not mention tracking accuracy • 1 proposed the accuracy measure • 1 specified the accuracy (tracking the
tennis ball)
Research is focused mainly on reliability.
Our motivation: sport experts (end users).

Sources and types of errorsSources and types of errors
Note:
• We track global movement of players for
the purpose of match analysis.
• No operator mistakes are allowed.

Tracking parametersTracking parameters
• Tracking method used: • 3 available • 2 included in experiments
• Post-processing of trajectories • filter width
• Position of the players: • radial distortion • non-uniform quantization
• Activity of the players: • movement of extremities
Ground truthGround truth
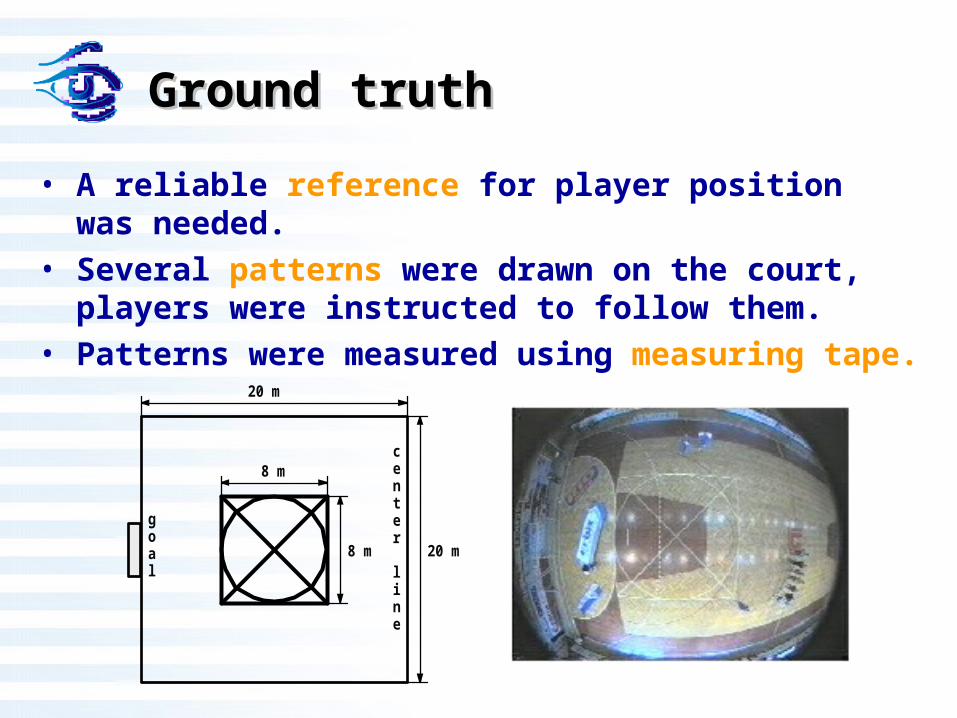
• A reliable reference for player position was needed.• Several patterns were drawn on the court, players were instructed to follow them.• Patterns were measured using measuring tape.
goal
center
line
20 m
8 m
8 m
20 m

Experiment I.Experiment I.
Position accuracy (RMS error) and path length error with respect to:
• different tracking methods • player position • player activity.
• 2 players at court boundary, 3 near court center.
• 60 seconds (@25 fps) standing still, 150 seconds active (passing ball, jumping - all at the same position).

Experiment I.Experiment I.
• 2D histograms of player position,cumulative histograms of absolute position error:
• Combined (color + template tracking) method performed better than background subtraction.
• Wide FIR filter decreases error in path length - heavy smoothing preferred.
RMS position error:
0.18 - 0.50 m (still)
0.28 - 0.63 m (active)
Path length error:
0.6 - 1 m/player/min (still)
6 - 10 m/player/min (active)

Experiment II.Experiment II.
• Effect of FIR filter width (wide filter = intense smoothing) to square trajectory.
• Error measure:
• In presence of rapid changes in player direction, wide filter distorts trajectory.

Experiment III.Experiment III.
• Velocity accuracy (RMS error) for uniform player motion.
• Circular trajectory as ground truth, constant velocity of players assumed.
• Reference velocity calculated from trajectory length and the time player
needed for one round.
• 5 players, Vref from 2.7 to 3.2 m/s
• RMS error of player velocity:
less smoothing: 0.21 to 0.35 m/s (6%-12%)
more smoothing: 0.07 to 0.20 m/s (3%-7%)
Experiment IV.Experiment IV.
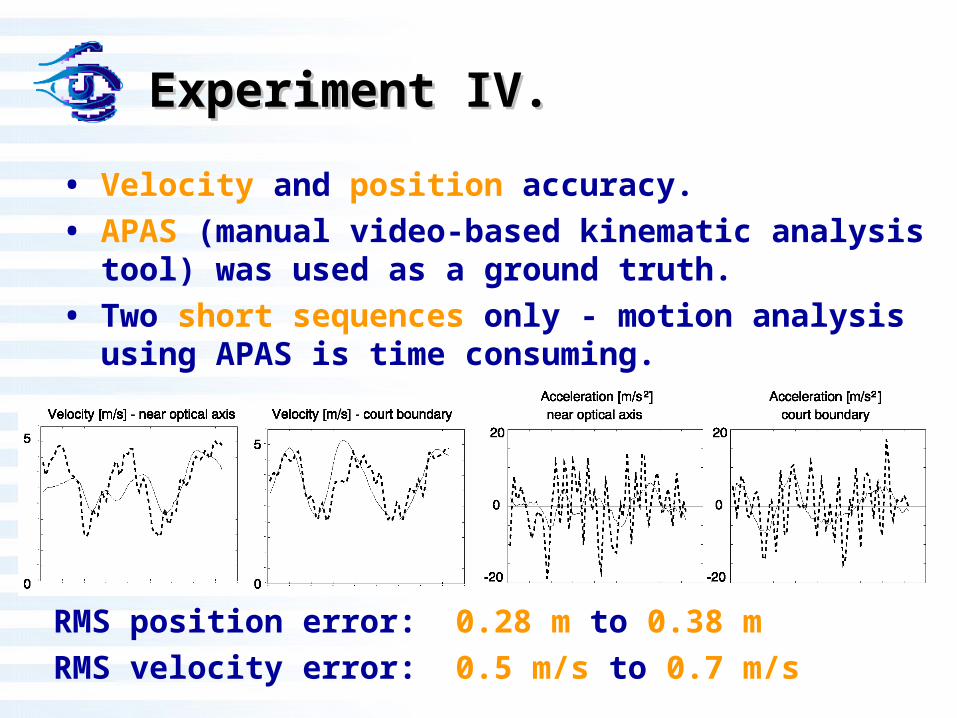
• Velocity and position accuracy.
• APAS (manual video-based kinematic analysis tool) was used as a ground truth.
• Two short sequences only - motion analysis using APAS is time consuming.
RMS position error: 0.28 m to 0.38 m
RMS velocity error: 0.5 m/s to 0.7 m/s

ConclusionConclusion
• RMS position error: from 0.2 m to 0.6 m
• RMS velocity error: from 0.2 m/s to 0.4 m/s
• Path length error: from +1 m to +10 m (per one player per minute)
• Players are large non-rigid objects - at this scale the limit is imposed by the definition of player position, velocity and path length itself.
• Ideas for future work: above definitions and similar research concerning manual position measurements.|