hybrid soft computing: where are we going? piero p. bonissone ge corporate research &...
Post on 21-Dec-2015
214 views
TRANSCRIPT
Hybrid Soft Computing:Where Are We Going?
Hybrid Soft Computing:Where Are We Going?
Piero P. BonissonePiero P. Bonissone
GE Corporate Research & DevelopmentGE Corporate Research & [email protected]@crd.ge.com
August 24, 2000 2ECAI 2000
• Soft Computing Overview SCComponents:PR,FL,NN,EA
• Modeling with FL and EA
• Hybrid SC Systems- FLCParameterTuningbyEA-EAParameterSetting
• Conclusions
Hybrid SC and EA - OutlineHybrid SC and EA - Outline
August 24, 2000 3ECAI 2000
• Soft Computing Overview SCComponents:PR,FL,NN,EA
• Modeling with FL and EA
• Hybrid SC Systems-FLCParameterTuningbyEA-EAParameterSetting
• Conclusions
Hybrid SC and EA - OutlineHybrid SC and EA - Outline
August 24, 2000 4ECAI 2000
Soft ComputingSoft Computing• Soft Computing (SC): the symbiotic use of
many emerging problem-solving disciplines.
• According to Prof. Zadeh:"...in contrast to traditional hard computing, soft computing exploits the tolerance for imprecision, uncertainty, and partial truth to achieve tractability, robustness, low solution-cost, and better rapport with reality”
• Soft Computing Main Components:-Approximate Reasoning:
» ProbabilisticReasoning,FuzzyLogic-Search & Optimization:
» NeuralNetworks,EvolutionaryAlgorithms

August 24, 2000 5ECAI 2000
Problem Solving TechniquesProblem Solving Techniques
SymbolicLogic
Reasoning
TraditionalNumerical
ModelingandSearch
ApproximateReasoning
FunctionalApproximation
andRandomizedSearch
HARD COMPUTING SOFT COMPUTING
Precise Models Approximate Models
August 24, 2000 6ECAI 2000
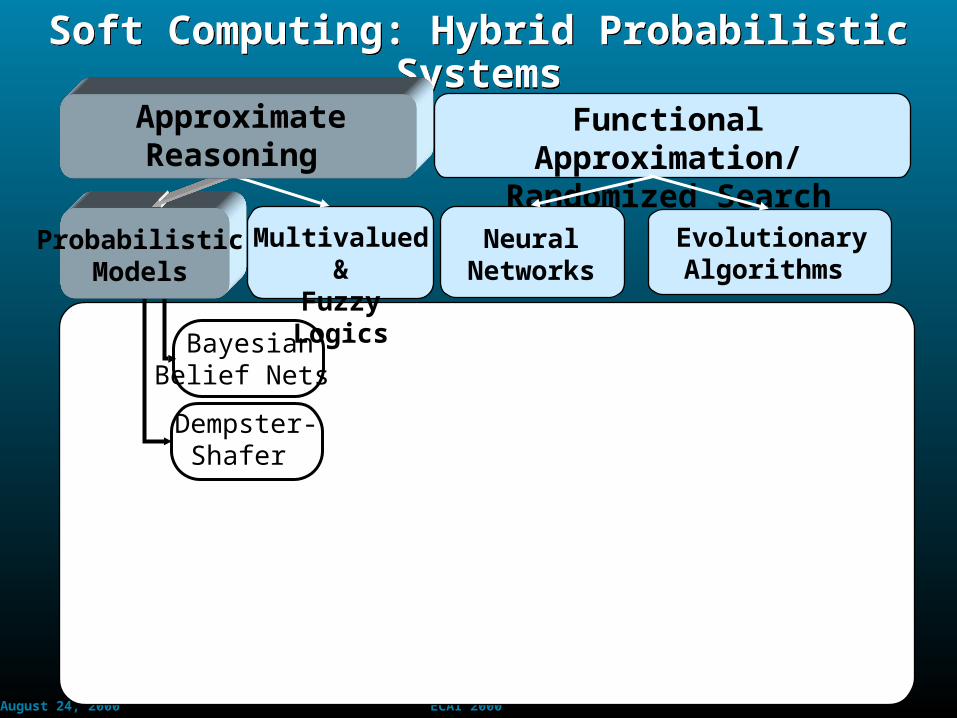
Soft Computing: Hybrid Probabilistic SystemsSoft Computing: Hybrid Probabilistic Systems
Functional Approximation/ Randomized Search
NeuralNetworks
BayesianBeliefNets
EvolutionaryAlgorithms
Multivalued &Fuzzy Logics
Dempster-Shafer
Probabilistic Models
Approximate Reasoning
August 24, 2000 7ECAI 2000
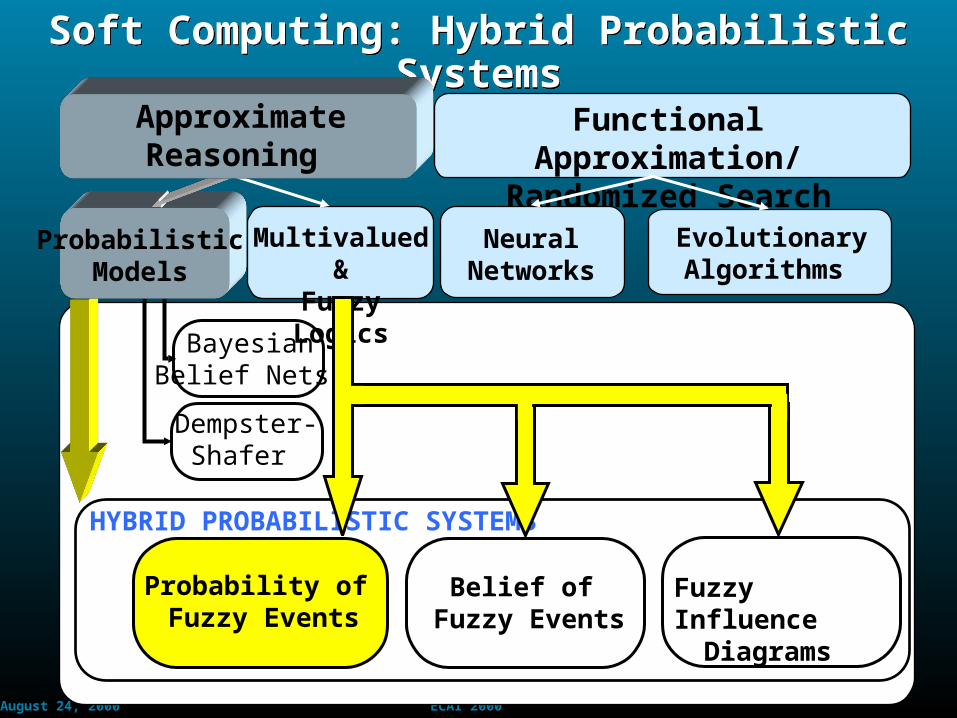
Soft Computing: Hybrid Probabilistic SystemsSoft Computing: Hybrid Probabilistic Systems
Functional Approximation/ Randomized Search
NeuralNetworks
BayesianBeliefNets
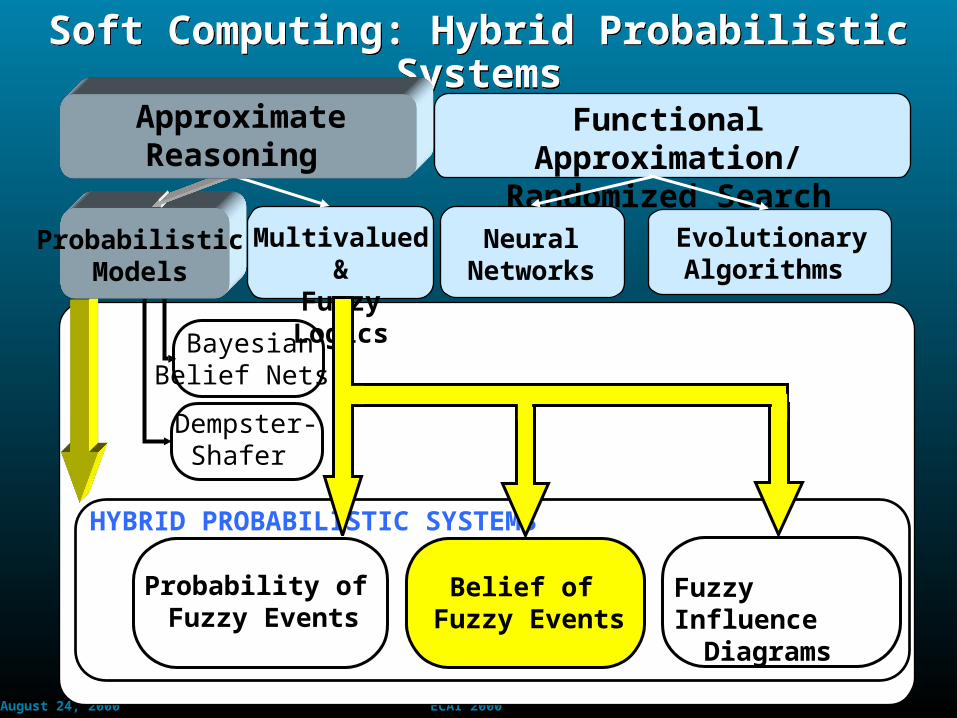
Fuzzy Influence Diagrams
Belief of Fuzzy Events
EvolutionaryAlgorithms
Multivalued &Fuzzy Logics
Probability of Fuzzy Events
HYBRID PROBABILISTIC SYSTEMS
Dempster-Shafer
Probabilistic Models
Approximate Reasoning
August 24, 2000 8ECAI 2000
Soft Computing: Hybrid Probabilistic SystemsSoft Computing: Hybrid Probabilistic Systems
Functional Approximation/ Randomized Search
NeuralNetworks
BayesianBeliefNets
Fuzzy Influence Diagrams
Belief of Fuzzy Events
EvolutionaryAlgorithms
Multivalued &Fuzzy Logics
Probability of Fuzzy Events
HYBRID PROBABILISTIC SYSTEMS
Dempster-Shafer
Probabilistic Models
Approximate Reasoning
August 24, 2000 9ECAI 2000
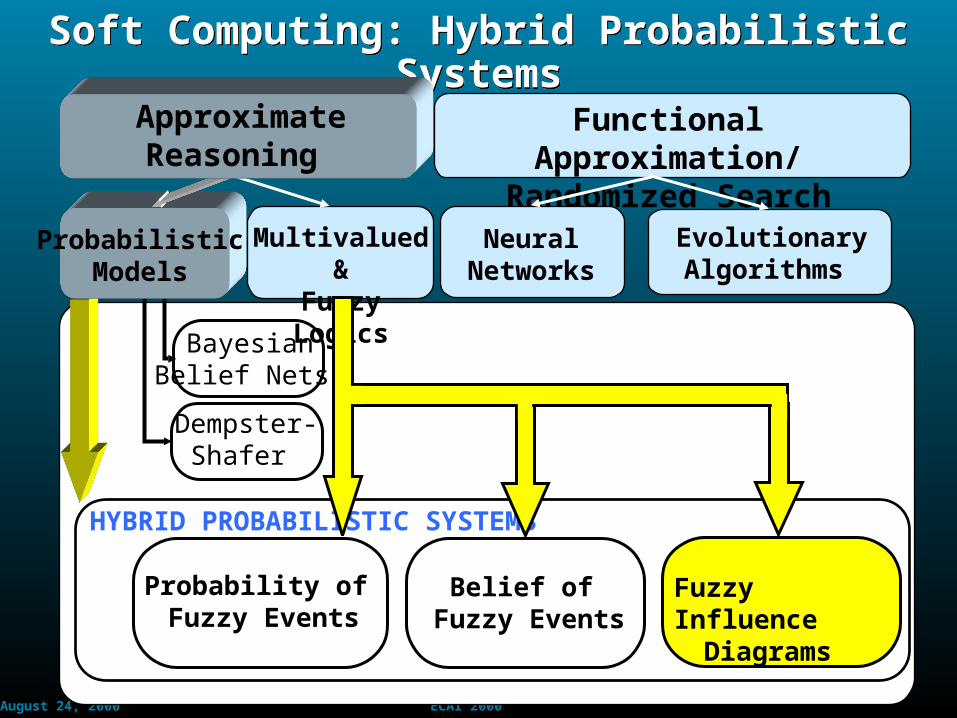
Soft Computing: Hybrid Probabilistic SystemsSoft Computing: Hybrid Probabilistic Systems
Functional Approximation/ Randomized Search
NeuralNetworks
BayesianBeliefNets
Fuzzy Influence Diagrams
Belief of Fuzzy Events
EvolutionaryAlgorithms
Multivalued &Fuzzy Logics
Probability of Fuzzy Events
HYBRID PROBABILISTIC SYSTEMS
Dempster-Shafer
Probabilistic Models
Approximate Reasoning
August 24, 2000 10ECAI 2000
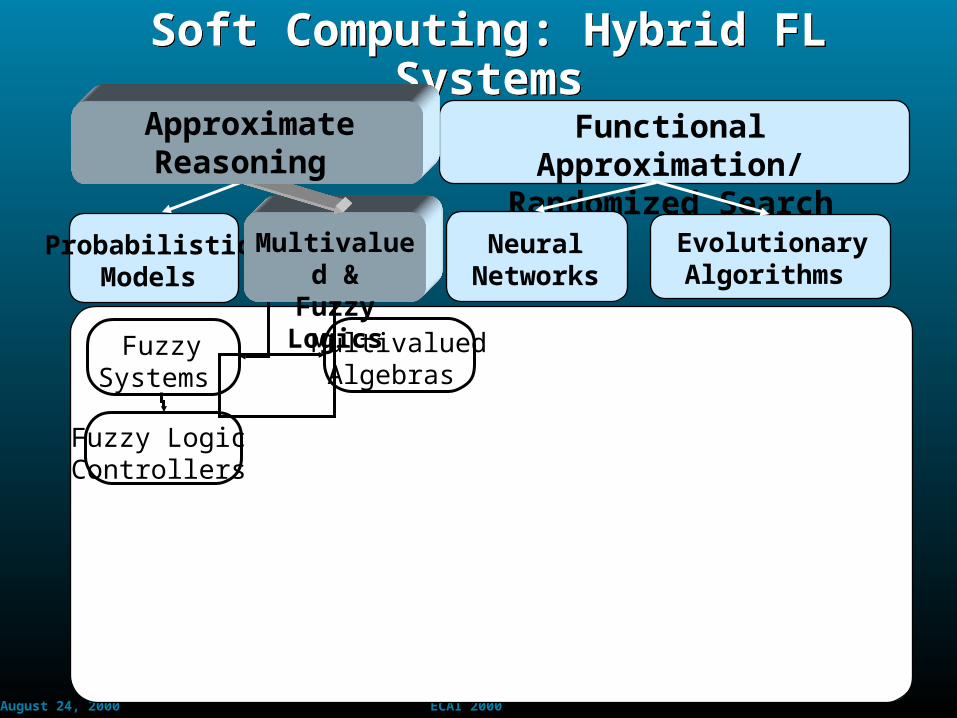
Soft Computing: Hybrid FL SystemsSoft Computing: Hybrid FL Systems
Functional Approximation/ Randomized Search
Probabilistic Models
NeuralNetworks
FuzzySystems
EvolutionaryAlgorithms
Multivalued &
Fuzzy LogicsMultivaluedAlgebras
FuzzyLogicControllers
Approximate Reasoning
August 24, 2000 11ECAI 2000
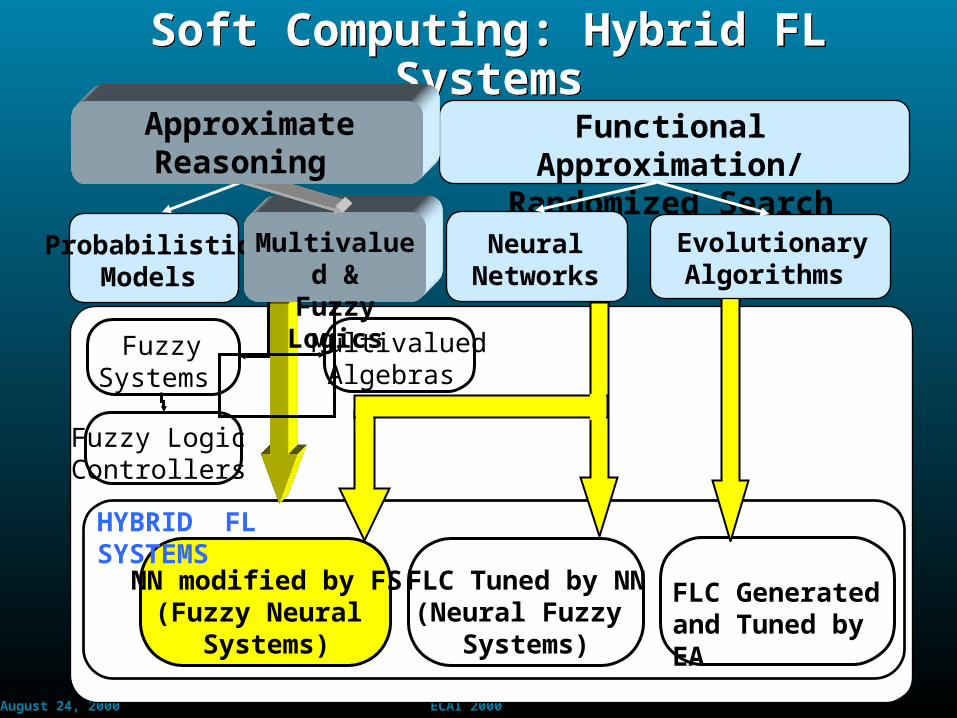
Soft Computing: Hybrid FL SystemsSoft Computing: Hybrid FL Systems
Functional Approximation/ Randomized Search
Probabilistic Models
NeuralNetworks
FuzzySystems
FLC Generatedand Tuned by EA
FLC Tuned by NN(Neural Fuzzy
Systems)
EvolutionaryAlgorithms
Multivalued &
Fuzzy Logics
NN modified by FS(Fuzzy Neural
Systems)
MultivaluedAlgebras
FuzzyLogicControllers
HYBRID FL SYSTEMS
Approximate Reasoning
August 24, 2000 12ECAI 2000
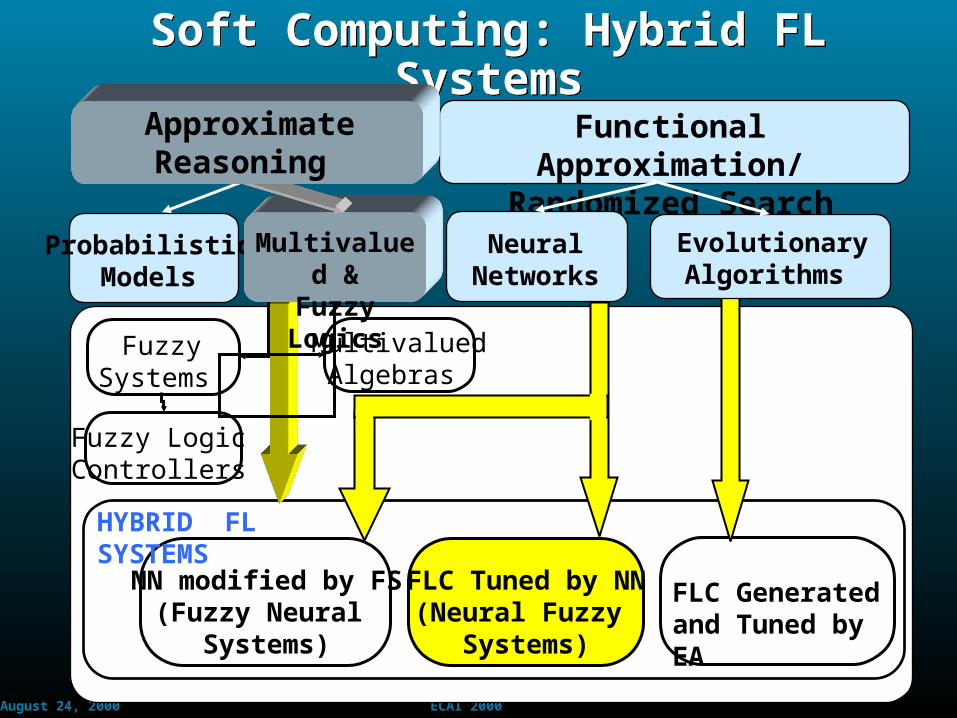
Soft Computing: Hybrid FL SystemsSoft Computing: Hybrid FL Systems
Functional Approximation/ Randomized Search
Probabilistic Models
NeuralNetworks
FuzzySystems
FLC Generatedand Tuned by EA
FLC Tuned by NN(Neural Fuzzy
Systems)
EvolutionaryAlgorithms
Multivalued &
Fuzzy Logics
NN modified by FS(Fuzzy Neural
Systems)
MultivaluedAlgebras
FuzzyLogicControllers
HYBRID FL SYSTEMS
Approximate Reasoning
August 24, 2000 13ECAI 2000
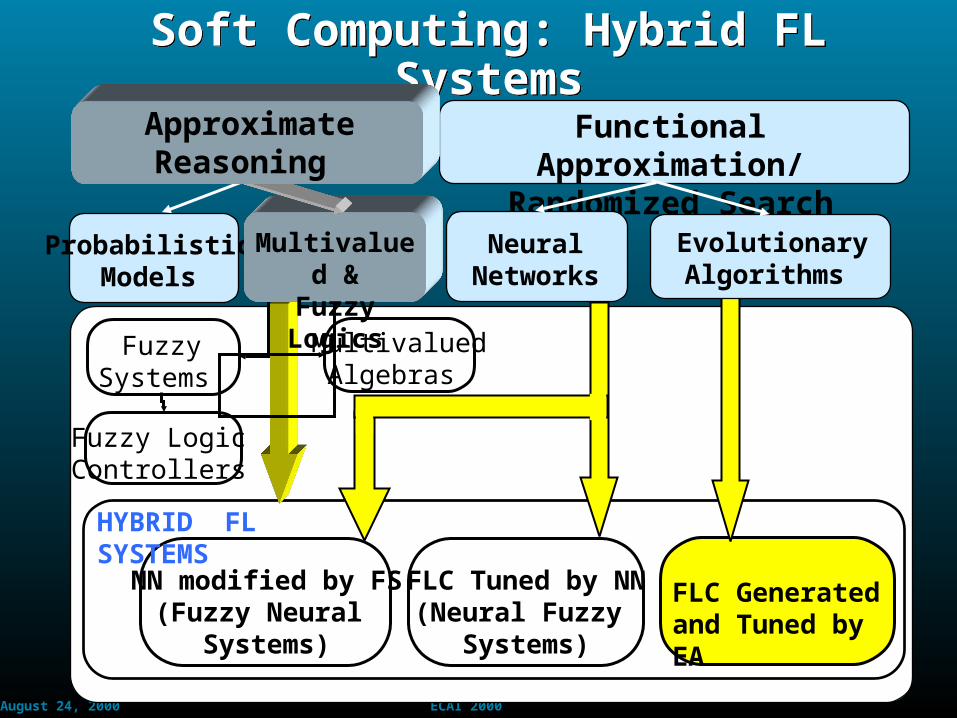
Soft Computing: Hybrid FL SystemsSoft Computing: Hybrid FL Systems
Functional Approximation/ Randomized Search
Probabilistic Models
NeuralNetworks
FuzzySystems
FLC Generatedand Tuned by EA
FLC Tuned by NN(Neural Fuzzy
Systems)
EvolutionaryAlgorithms
Multivalued &
Fuzzy Logics
NN modified by FS(Fuzzy Neural
Systems)
MultivaluedAlgebras
FuzzyLogicControllers
HYBRID FL SYSTEMS
Approximate Reasoning
August 24, 2000 14ECAI 2000
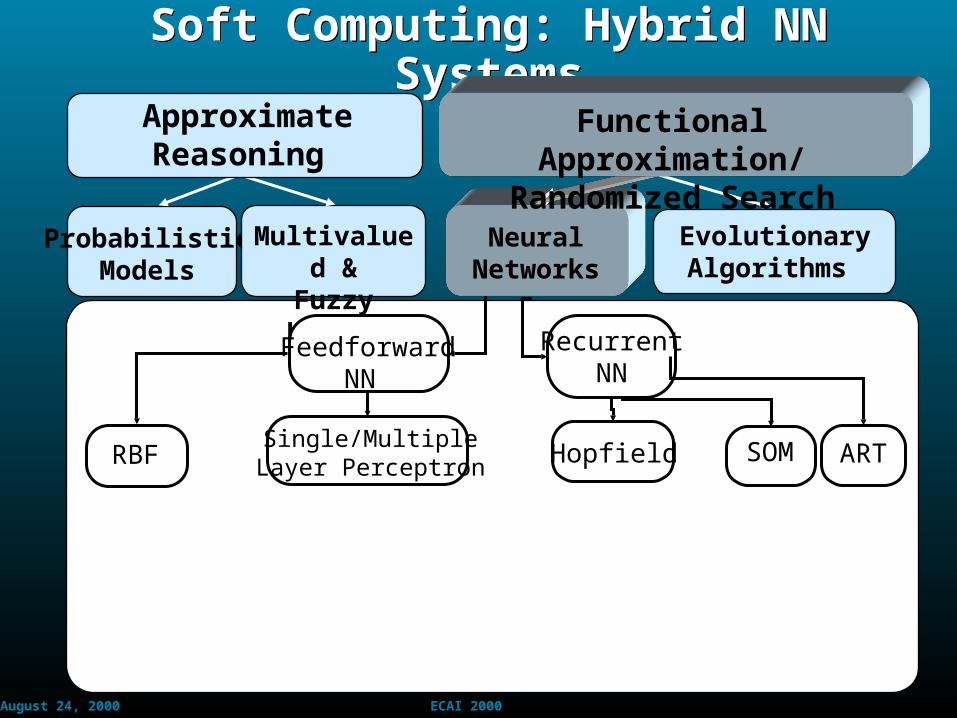
Soft Computing: Hybrid NN SystemsSoft Computing: Hybrid NN Systems
Probabilistic Models
Multivalued &Fuzzy Logics
FeedforwardNN
RBF
RecurrentNN
NeuralNetworks
Hopfield SOM ART
Functional Approximation/ Randomized Search
Approximate Reasoning
EvolutionaryAlgorithms
Single/MultipleLayerPerceptron
August 24, 2000 15ECAI 2000
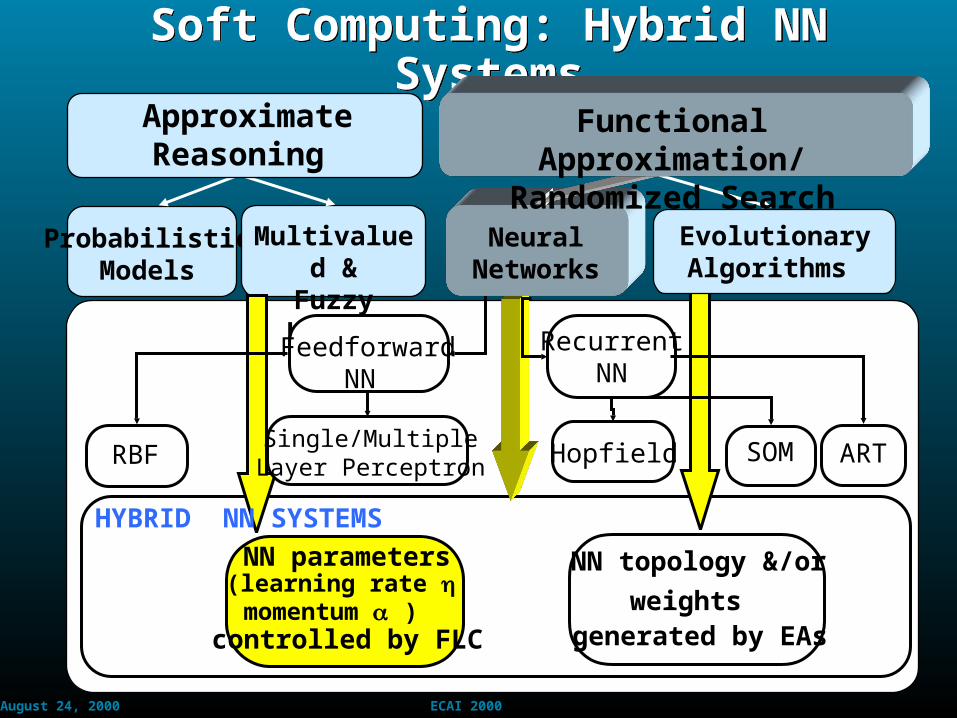
Soft Computing: Hybrid NN SystemsSoft Computing: Hybrid NN Systems
Probabilistic Models
Multivalued &Fuzzy Logics
FeedforwardNN
RBF
RecurrentNN
HYBRID NN SYSTEMS
NN topology &/or
weights generated by EAscontrolled by FLC
NN parameters(learning rate momentum )
NeuralNetworks
Hopfield SOM ART
Functional Approximation/ Randomized Search
Approximate Reasoning
EvolutionaryAlgorithms
Single/MultipleLayerPerceptron
August 24, 2000 16ECAI 2000
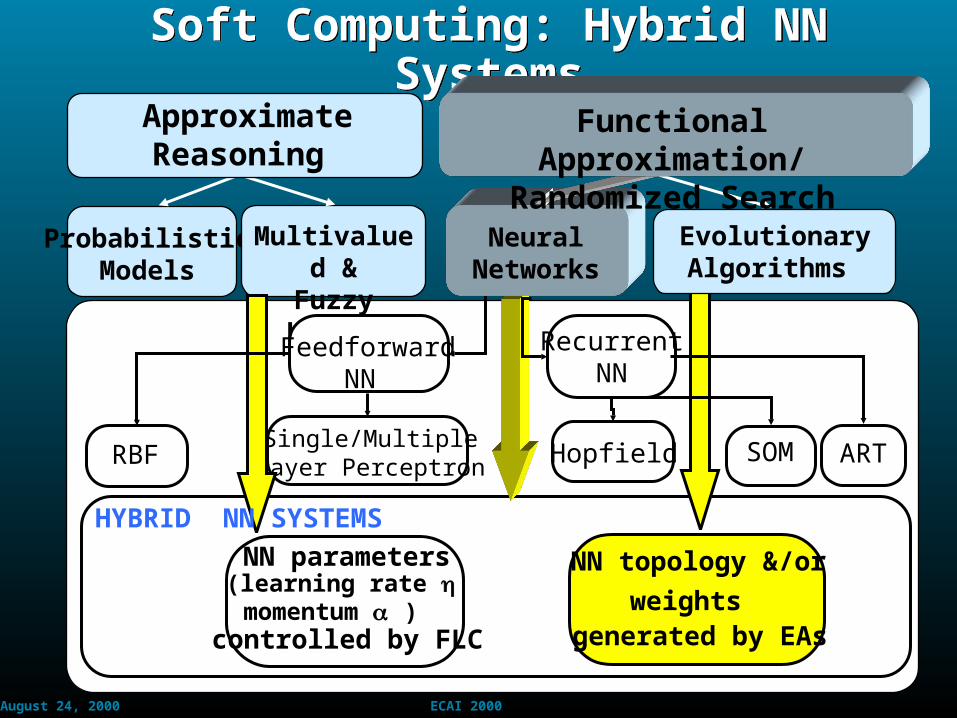
Soft Computing: Hybrid NN SystemsSoft Computing: Hybrid NN Systems
Probabilistic Models
Multivalued &Fuzzy Logics
FeedforwardNN
Single/MultipleLayerPerceptronRBF
RecurrentNN
HYBRID NN SYSTEMS
NN topology &/or
weights generated by EAscontrolled by FLC
NN parameters(learning rate momentum )
NeuralNetworks
Hopfield SOM ART
Functional Approximation/ Randomized Search
Approximate Reasoning
EvolutionaryAlgorithms
August 24, 2000 17ECAI 2000
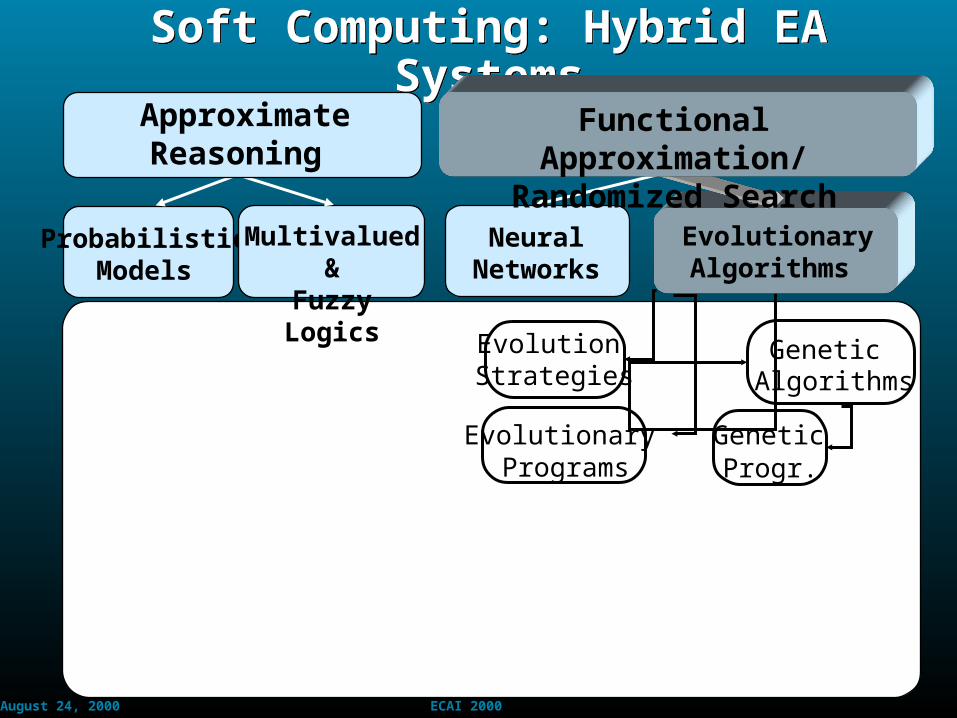
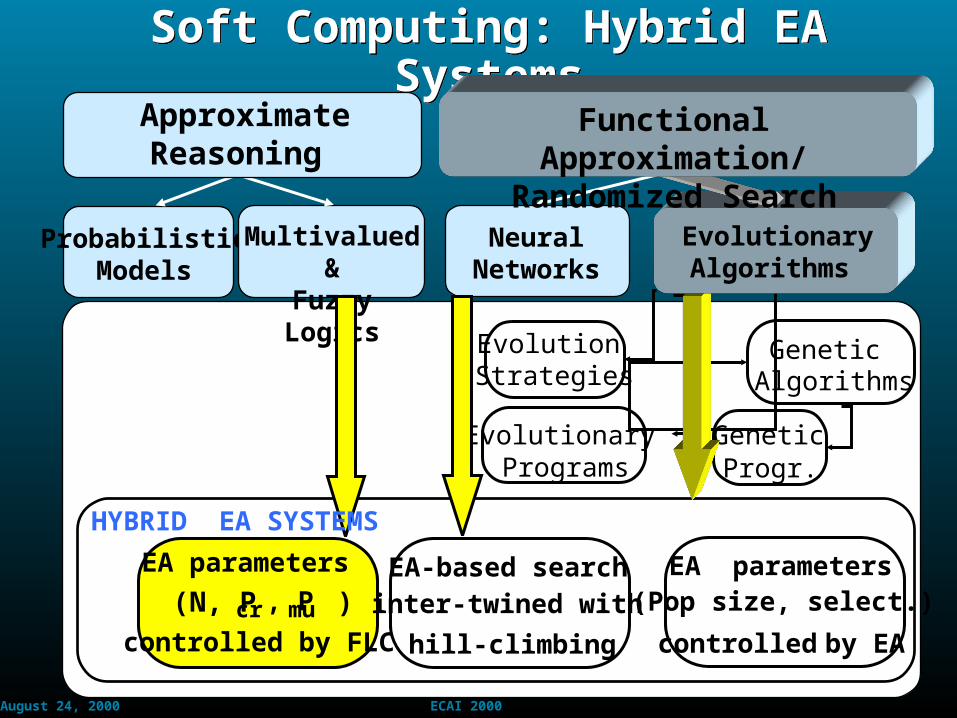
Soft Computing: Hybrid EA SystemsSoft Computing: Hybrid EA Systems
Probabilistic Models
Multivalued &Fuzzy Logics
NeuralNetworks
EvolutionStrategies
EvolutionaryPrograms
GeneticProgr.
GeneticAlgorithms
EvolutionaryAlgorithms
Approximate Reasoning
Functional Approximation/ Randomized Search
August 24, 2000 18ECAI 2000
Soft Computing: Hybrid EA SystemsSoft Computing: Hybrid EA Systems
Probabilistic Models
Multivalued &Fuzzy Logics
NeuralNetworks
EvolutionStrategies
EvolutionaryPrograms
GeneticProgr.
EA parameters (Pop size, select.)
controlled by EA
GeneticAlgorithms
EA parameters
(N, Pcr , Pmu )
controlled by FLC
EA-based search inter-twined with
hill-climbing
HYBRID EA SYSTEMS
EvolutionaryAlgorithms
Approximate Reasoning
Functional Approximation/ Randomized Search
August 24, 2000 19ECAI 2000
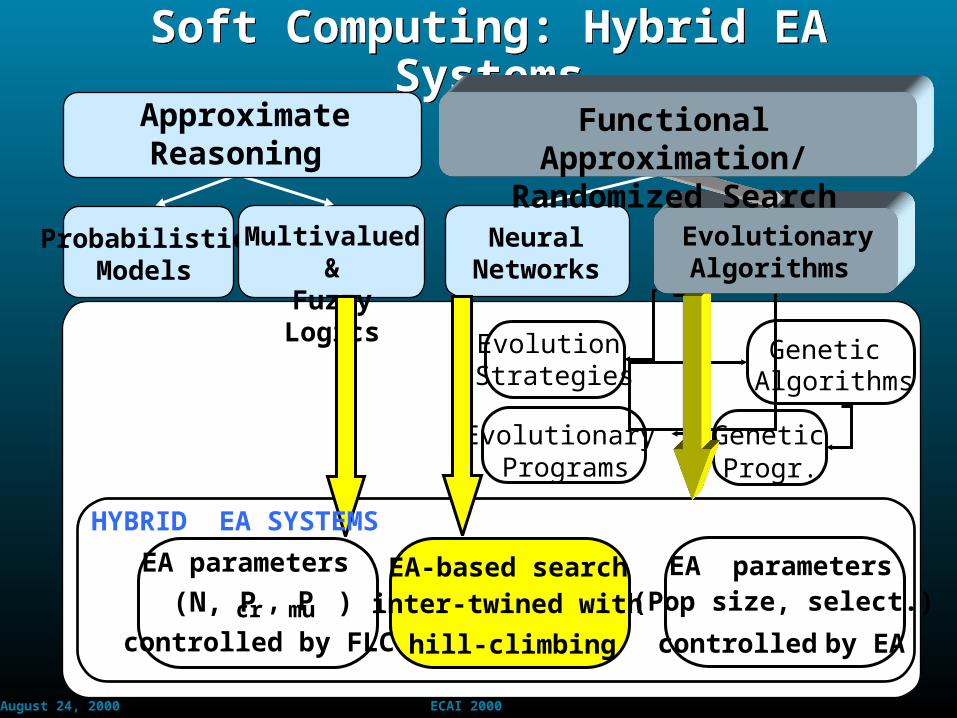
Soft Computing: Hybrid EA SystemsSoft Computing: Hybrid EA Systems
Probabilistic Models
Multivalued &Fuzzy Logics
NeuralNetworks
EvolutionStrategies
EvolutionaryPrograms
GeneticProgr.
EA parameters (Pop size, select.)
controlled by EA
GeneticAlgorithms
EA parameters
(N, Pcr , Pmu )
controlled by FLC
EA-based search inter-twined with
hill-climbing
HYBRID EA SYSTEMS
EvolutionaryAlgorithms
Approximate Reasoning
Functional Approximation/ Randomized Search
August 24, 2000 20ECAI 2000
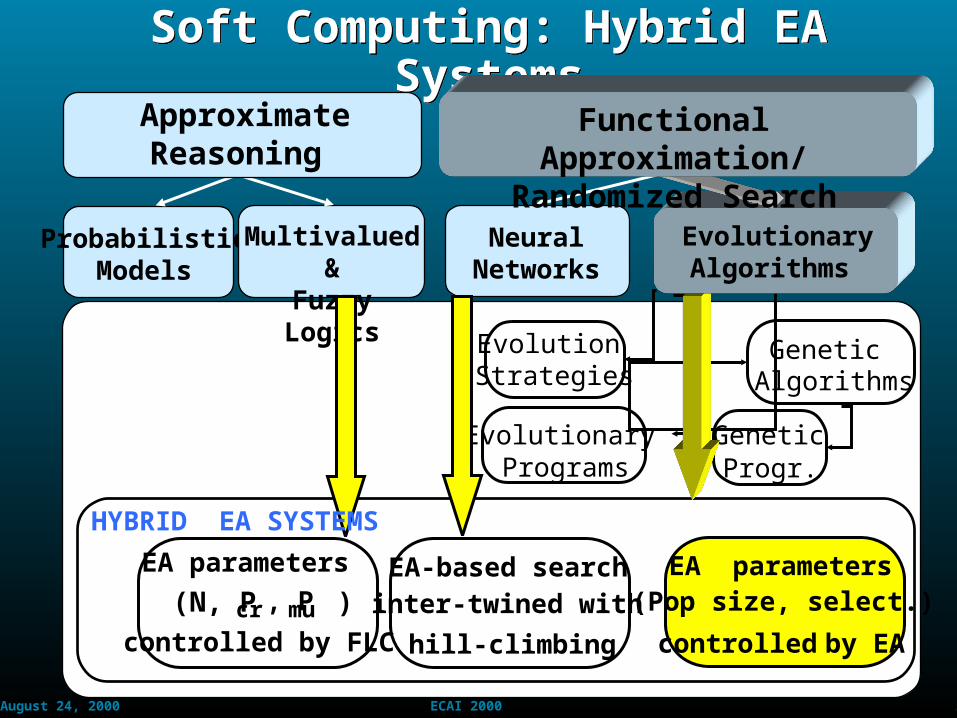
Soft Computing: Hybrid EA SystemsSoft Computing: Hybrid EA Systems
Probabilistic Models
Multivalued &Fuzzy Logics
NeuralNetworks
EvolutionStrategies
EvolutionaryPrograms
GeneticProgr.
EA parameters (Pop size, select.)
controlled by EA
GeneticAlgorithms
EA parameters
(N, Pcr , Pmu )
controlled by FLC
EA-based search inter-twined with
hill-climbing
HYBRID EA SYSTEMS
EvolutionaryAlgorithms
Approximate Reasoning
Functional Approximation/ Randomized Search
August 24, 2000 21ECAI 2000
• Soft Computing Overview SCComponents:PR,FL,NN,EA
• Modeling with FL and EA
• Hybrid SC Systems-FLCParameterTuningbyEA-EAParameterSetting
• Conclusions
Hybrid SC and EA – Outline (2)Hybrid SC and EA – Outline (2)
August 24, 2000 22ECAI 2000
Fuzzy Logic GenealogyFuzzy Logic Genealogy
• Origins: MVL for treatment of imprecision and vagueness
- 1930s: Post, Kleene, and Lukasiewicz attempted to represent undetermined, unknown, and other possible intermediate truth-values.
- 1937: Max Black suggested the use of a consistency profile to represent vague (ambiguous) concepts
- 1965: Zadeh proposed a complete theory of fuzzy sets (and its isomorphic fuzzy logic), to represent and manipulate ill-defined concepts
August 24, 2000 23ECAI 2000
Fuzzy Logic : Linguistic VariablesFuzzy Logic : Linguistic Variables
• Fuzzy logic give us a language (with syntax and local semantics), in which we can translate our qualitative domain knowledge.
• Linguistic variables to model dynamic systems
• These variables take linguistic values that are characterized by:
- a label - a sentence generated from the syntax
- a meaning - a membership function determined by a local semantic procedure
August 24, 2000 24ECAI 2000
Fuzzy Logic : Reasoning MethodsFuzzy Logic : Reasoning Methods
• The meaning of a linguistic variable may be interpreted as a elastic constraint on its value. • These constraints are propagated by fuzzy inference operations, based on the generalized modus-ponens.
• A FL Controller (FLC) applies this reasoning system to a Knowledge Base (KB) containing the problem domain heuristics.• The inference is the result of interpolating among the outputs of all relevant rules. • The outcome is a membership distribution on the output space, which is defuzzified to produce a crisp output.

August 24, 2000 25ECAI 2000
S
S
L
L
S
L
S
L
LN
SN
SP
LP
Inputs
Fuzzy Logic Control : Inference MethodFuzzy Logic Control : Inference MethodState Variables Output Variable
Rules
Defuzzification
Inter-polation

August 24, 2000 26ECAI 2000
FLC Inference Method (cont.)FLC Inference Method (cont.)
• A FLC (KB + Reasoning Mechanism) defines a deterministic response surface in the cross product of state and output spaces, which approximates the original relationship.
• The FLC leverages the interpolation properties of this reasoning mechanism, to exhibit robustness with respect to parameter variations, disturbances, etc.
August 24, 2000 27ECAI 2000
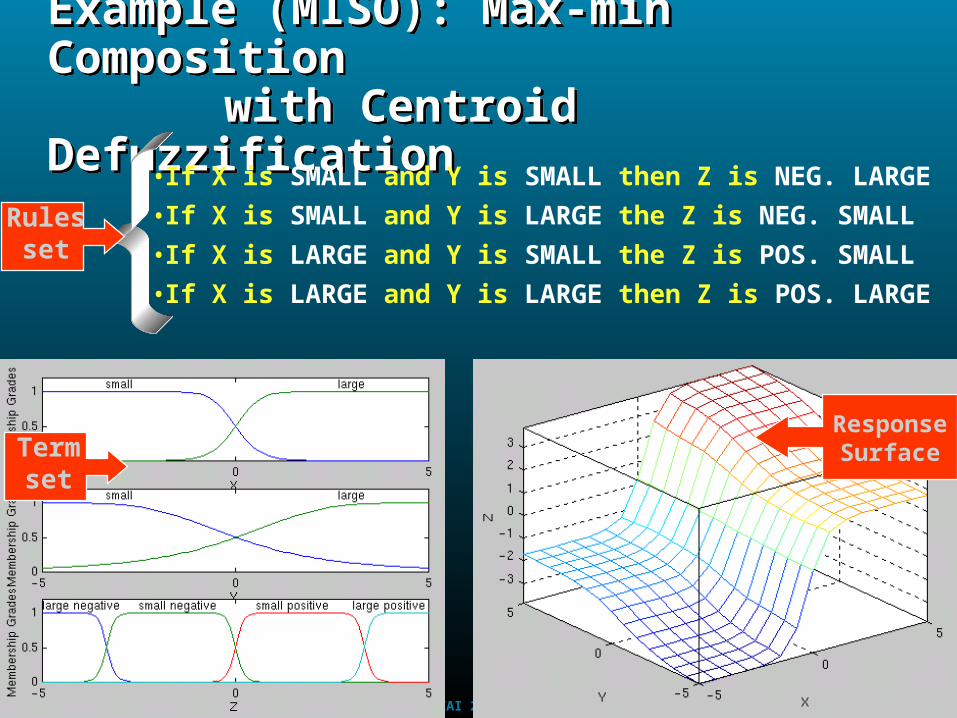
Example (MISO): Max-min Composition with Centroid Defuzzification
Example (MISO): Max-min Composition with Centroid Defuzzification
•If X is SMALL and Y is SMALL then Z is NEG. LARGE
•If X is SMALL and Y is LARGE the Z is NEG. SMALL
•If X is LARGE and Y is SMALL the Z is POS. SMALL
•If X is LARGE and Y is LARGE then Z is POS. LARGE
ResponseSurfaceTerm
set
Rulesset
August 24, 2000 28ECAI 2000
Evolutionary Algorithms (EA)Evolutionary Algorithms (EA)EA are part of the Derivative-Free Optimization and Search Methods: -EvolutionaryAlgorithms
-Simulatedannealing(SA)-Randomsearch-Downhillsimplexsearch-Tabusearch
EA consists of: -EvolutionStrategies(ES)-EvolutionaryProgramming(EP)-GeneticAlgorithms(GA)
-GeneticProgramming(GP)
August 24, 2000 29ECAI 2000
Evolutionary Algorithms Characteristics
Evolutionary Algorithms Characteristics
• Most Evolutionary Algorithms can be described by
- x[t] : the population at time t under representation x
- v : is the variation operator(s)
- s : is the selection operator
x[t + 1] = s(v(x[t]))x[t + 1] = s(v(x[t]))
August 24, 2000 30ECAI 2000
Evolutionary Algorithms Characteristics
Evolutionary Algorithms Characteristics
• EAexhibitanadaptivebehaviorthatallowsthemtohandlenon-linear,highdimensionalproblemswithoutrequiringdifferentiabilityorexplicitknowledgeoftheproblemstructure.
• EAareveryrobusttotime-varyingbehavior,eventhoughtheymayexhibitlowspeedofconvergence.
August 24, 2000 31ECAI 2000
ModelingModeling
• Model =
Structure + Parameters + Search Method
• Classical control theory:- Structure: order of the differential equations
- Parameters: coefficients of differential equation.
- Search method: LMSE, Pole-placement, etc.
August 24, 2000 32ECAI 2000
Modeling Using FLC (Mamdani type)
Modeling Using FLC (Mamdani type)
• A Mamdani- type FLC approximates a relationship between a state X and an output Y by using a KB and a reasoning mechanism (generalized modus-ponens).
• The Knowledge Base (KB) is defined by:- Scaling factors (SF): ranges of values of state
and output variables- Termset (TS): membership functions of values- Ruleset (RS): a syntactic mapping of symbols
from X to Y
August 24, 2000 33ECAI 2000
Modeling Using FLC (Mamdani type)
Modeling Using FLC (Mamdani type)
• The structure of the model is the ruleset.
• The parameters of the model are the scaling factors and termsets.
• The search method is initialized by knowledge engineering and refined with some other external methods (SOFC, error minimization, etc.)
August 24, 2000 34ECAI 2000
Modeling Using EA Modeling Using EA
• Similarly, for EA:- The structure of the model is the
representation of an individual in the population (e.g., binary string, vector, parse tree, Finite State Machine).
- The parameters of the model are the Population Size, Probability of Mutation, Prob. of Recombination, Generation Gap, etc.
- The search method is a global search based on maximization of population fitness function
August 24, 2000 35ECAI 2000
• Soft Computing Overview SCComponents:PR,FL,NN,EA
• Modeling with FL and EA
• Hybrid SC Systems-FLCParameterTuningbyEA-EAParameterSetting
• Conclusions
Hybrid SC and EA – Outline (3a)Hybrid SC and EA – Outline (3a)
August 24, 2000 36ECAI 2000
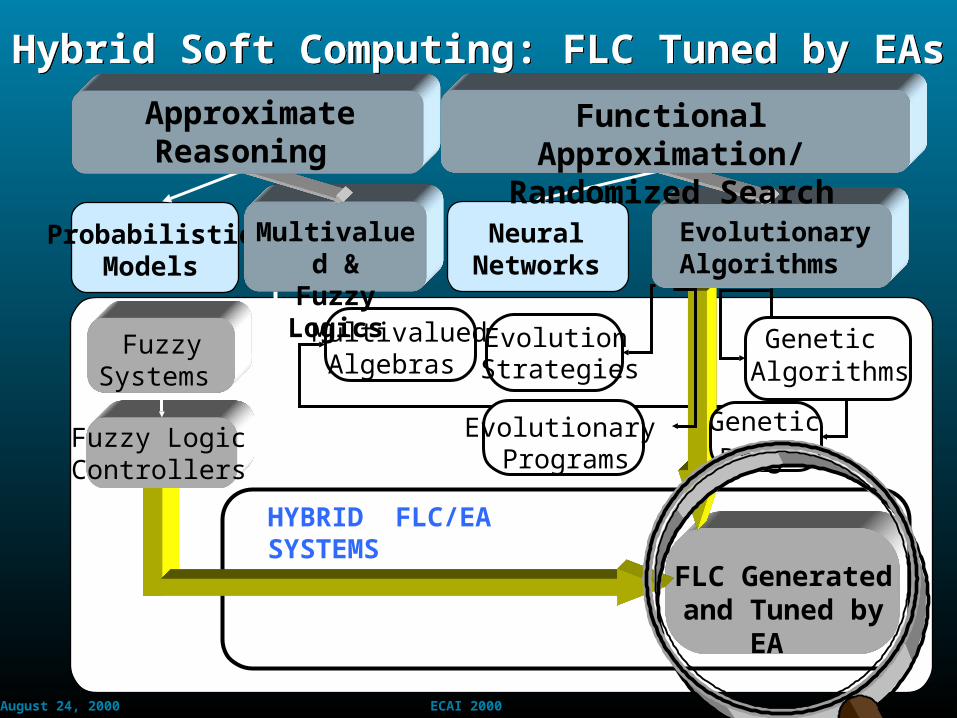
Hybrid Soft Computing: FLC Tuned by EAsHybrid Soft Computing: FLC Tuned by EAs
Probabilistic Models
NeuralNetworks
FLC Generatedand Tuned by EA
MultivaluedAlgebras
HYBRID FLC/EA SYSTEMS
EvolutionStrategies
EvolutionaryPrograms
GeneticProgr.
FuzzyLogicControllers
FuzzySystems
Approximate Reasoning
Multivalued &Fuzzy Logics
GeneticAlgorithms
EvolutionaryAlgorithms
Functional Approximation/ Randomized Search
August 24, 2000 37ECAI 2000
FLC Tuned by EA - OutlineFLC Tuned by EA - OutlineFLC Tuned by EA - OutlineFLC Tuned by EA - Outline
• Components & Historical Approaches
• Application to Automatic Train Handling (ATH)
• Solution Architecture
• Analysis of Results
• Remarks
August 24, 2000 38ECAI 2000
FL Controllers Tuned by EAs
• FLC- FLC = KB + Inference Engine (with Defuzz.)
- KB parameters: »Scalingfactors(SF)»MembershipFunctions(MF)»Ruleset(RS)
• EA- Encoding:binaryorreal-valued
- Chromosome:stringortable
- Fitnessfunction:Sumquadraticerrors,entropy
- Operators:one-pointcrossover,max-minarithmeticalcrossover,point-radiuscrossover.
August 24, 2000 39ECAI 2000
FL Controllers tuned by EAs (cont.)• Historical Approaches:
- Karr 91-93: » Chromosome=concatenationofalltermsets.
» Eachvalueinatermsetwasrepresentedby3binary-encodedparameters.
- Lee & Takagi 93: » Chromosome=1TSKrule(LHS:memb.fnct.RHSpol.)
» Binaryencodingof3-parameterrepr.ofeachterm
- Surman et al: 93:» Fitnessfunctionwithaddedentropytermdescribingnumberofactivatedrules
August 24, 2000 40ECAI 2000
SC in Train Handling: An ExampleSC in Train Handling: An Example
• Problem Description- Develop an automated train handler to control a massive,
distributed system with little sensor information
- Freight trains consist of several hundred heavy railcars connected by couplers (train length up to two miles)
- Each coupler typically has a dead zone and a hydraulically damped spring
- Railcars can move relative to each other while in motion, leading to a train that can change its length by 50 – 100 ft.
- The position of the cars and couplers cannot be electronically sensed
August 24, 2000 41ECAI 2000
SC in Train Handling: An ExampleSC in Train Handling: An Example• Solution Requirements
• Anautomatedsystemhastosatisfymultiplegoals:
-Trackingavelocityreference(definedoverdistance)toenforcespeedlimitsandrespectthetrainschedule
Multi-body regulation problem, subject to proper slack management, without sensors for most of the state
-Providingadegreeoftrain-handlinguniformityacrossallcrews
-Operatingthetraininfuel-efficientregimes
-Maintainingasmoothridebyavoidingsuddenaccelerationsorbrakeapplications(slackcontrol)
August 24, 2000 42ECAI 2000
SC in Train Handling: An ExampleSC in Train Handling: An ExampleSC in Train Handling: An ExampleSC in Train Handling: An Example
• Description of Our Approach - Use a Velocity Profile externally generated
(using classical optimization or Evolutionary Algorithms)
- Use a Fuzzy Logic Control (FLC) to track the velocity reference (Fuzzy PI Control)
- Use an Evolutionary Algorithms to tune the FLC parameters to minimize velocity tracking error and number of throttle changes
- Implement control actions with fuzzy rule set to maintain slack control
August 24, 2000 43ECAI 2000
FLC tuned by EAs: Our ApproachFLC tuned by EAs: Our Approach• Chromosome (real-valued encoding)
- Chr.1=Scalingfactors;
- Chr.2=Termsets;
- Chr.3=Rules(notused)
• Order of tuning (as in Zheng '92): - InitializerulebasewithstandardPIstructureandtermsetswithuniformlydistributedterms
- ApplyEAstofindbestscalingfactors
- ApplyEAstofindbesttermsets
- ApplyEAstofindbestruleset(notused)
• Transition from large to small granularity
August 24, 2000 44ECAI 2000
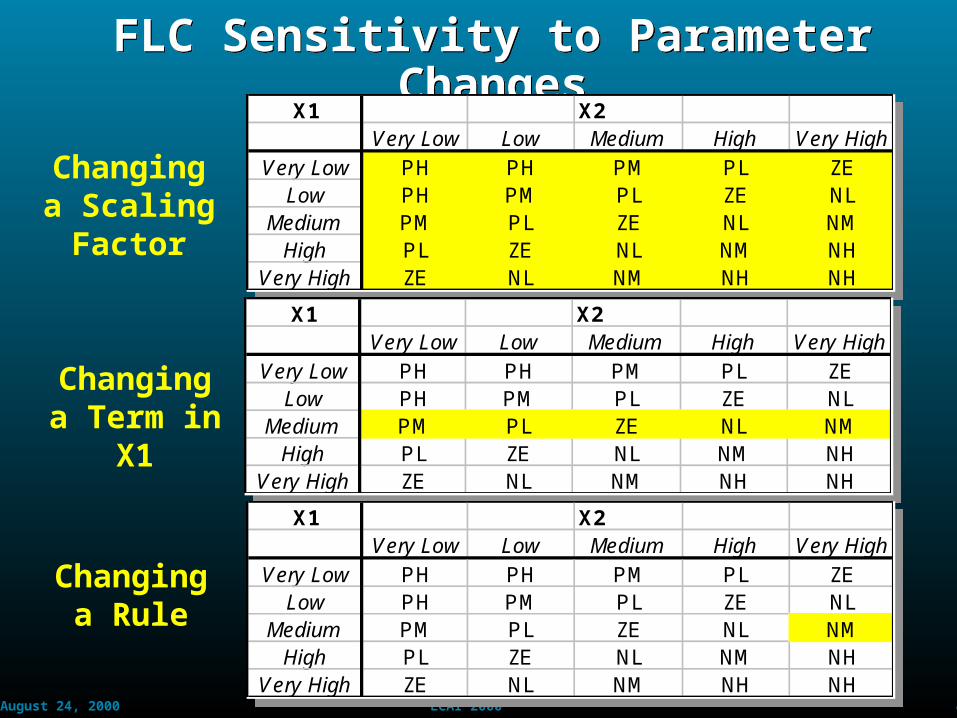
FLC Sensitivity to Parameter ChangesFLC Sensitivity to Parameter ChangesX1 X2
Very Low Low Medium High Very HighVery Low PH PH PM PL ZE
Low PH PM PL ZE NLMedium PM PL ZE NL NM
High PL ZE NL NM NHVery High ZE NL NM NH NH
X1 X2Very Low Low Medium High Very High
Very Low PH PH PM PL ZELow PH PM PL ZE NL
Medium PM PL ZE NL NMHigh PL ZE NL NM NH
Very High ZE NL NM NH NH
Changinga Scaling
Factor
X1 X2Very Low Low Medium High Very High
Very Low PH PH PM PL ZELow PH PM PL ZE NL
Medium PM PL ZE NL NMHigh PL ZE NL NM NH
Very High ZE NL NM NH NH
X1 X2Very Low Low Medium High Very High
Very Low PH PH PM PL ZELow PH PM PL ZE NL
Medium PM PL ZE NL NMHigh PL ZE NL NM NH
Very High ZE NL NM NH NH
Changinga Term in
X1
X1 X2Very Low Low Medium High Very High
Very Low PH PH PM PL ZELow PH PM PL ZE NL
Medium PM PL ZE NL NMHigh PL ZE NL NM NH
Very High ZE NL NM NH NH
X1 X2Very Low Low Medium High Very High
Very Low PH PH PM PL ZELow PH PM PL ZE NL
Medium PM PL ZE NL NMHigh PL ZE NL NM NH
Very High ZE NL NM NH NH
Changinga Rule
August 24, 2000 45ECAI 2000
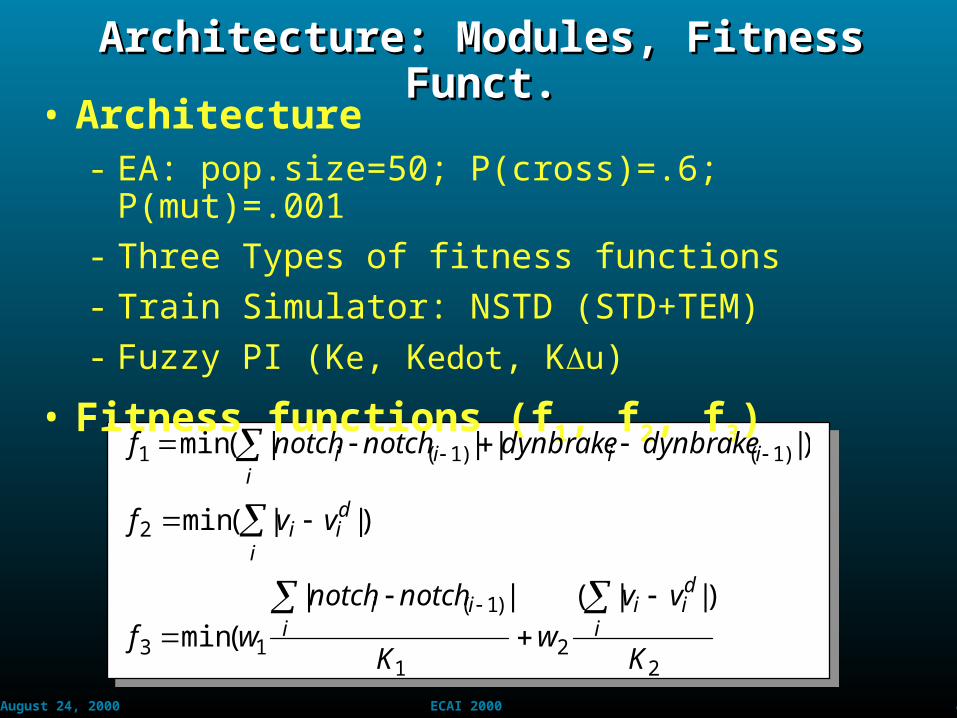
Architecture: Modules, Fitness Funct.Architecture: Modules, Fitness Funct.• Architecture
- EA:pop.size=50;P(cross)=.6;P(mut)=.001
- ThreeTypesoffitnessfunctions
- TrainSimulator:NSTD(STD+TEM)
- FuzzyPI(Ke,Kedot,Ku)
• Fitness functions (f1, f2, f3)
f1 min( |notchi i notch(i 1) ||dynbrakei dynbrake(i 1) |)
f2 min( |vii vi
d |)
f3 min(w1
|notchi i notch(i 1) |
K1w2
( |vii vi
d |)
K2
August 24, 2000 46ECAI 2000
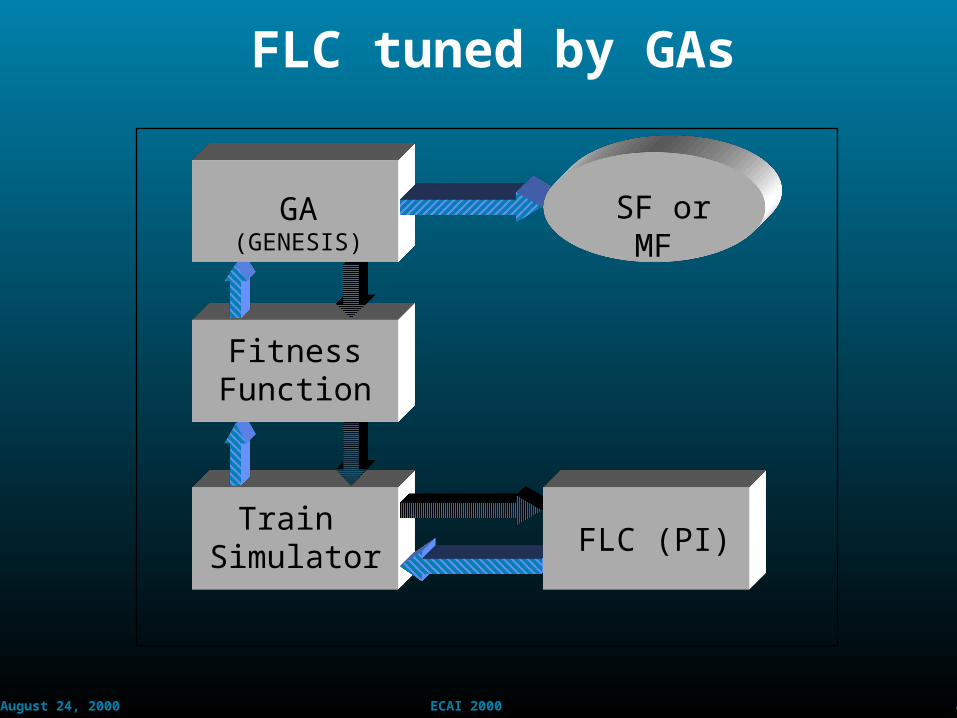
FLC tuned by GAs
TrainSimulator FLC(PI)
FitnessFunction
GA(GENESIS) SForMF
August 24, 2000 47ECAI 2000
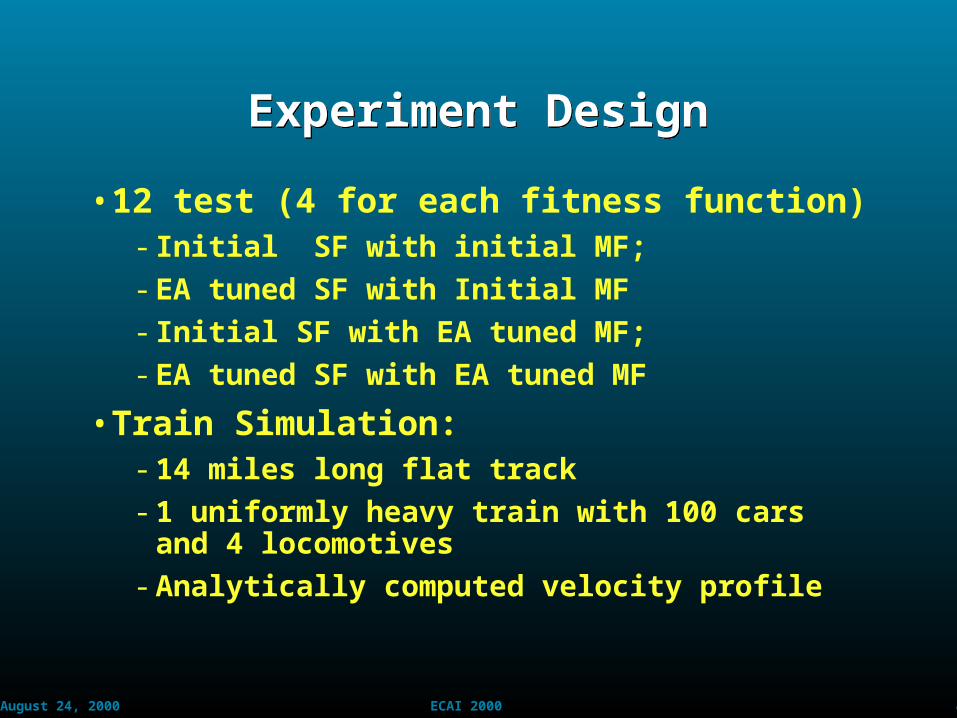
Experiment DesignExperiment Design
• 12 test (4 for each fitness function)- Initial SF with initial MF;
- EA tuned SF with Initial MF
- Initial SF with EA tuned MF;
- EA tuned SF with EA tuned MF
• Train Simulation:- 14 miles long flat track
- 1 uniformly heavy train with 100 cars and 4 locomotives
- Analytically computed velocity profile
August 24, 2000 48ECAI 2000
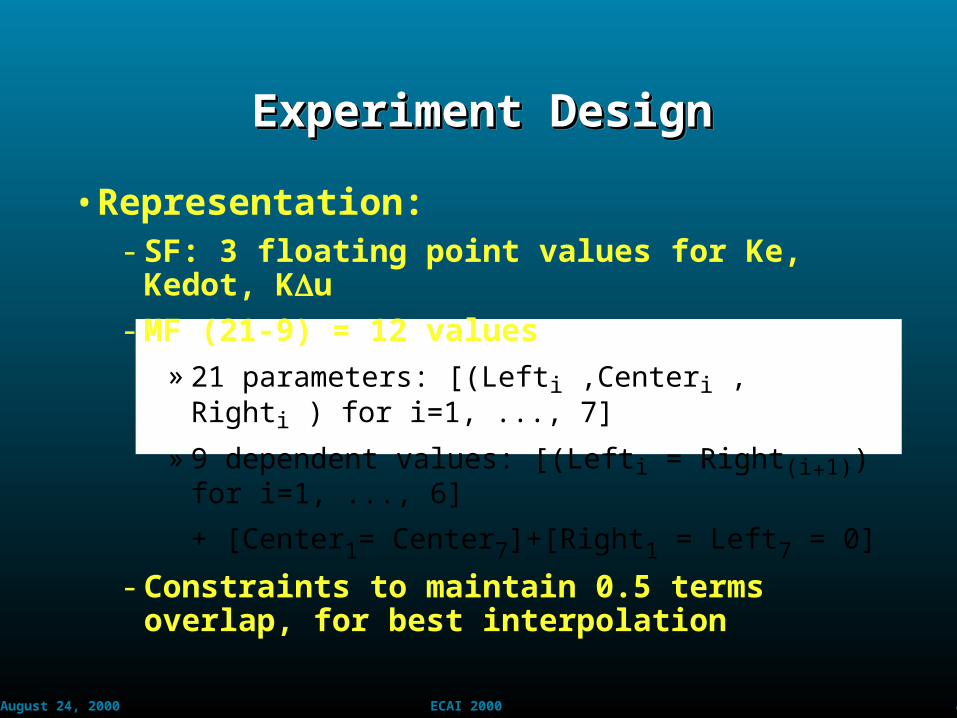
Experiment DesignExperiment DesignExperiment DesignExperiment Design
• Representation: - SF: 3 floating point values for Ke, Kedot, Ku
- MF (21-9) = 12 values» 21parameters:[(Lefti,Centeri,Righti)fori=1,...,7]
» 9dependentvalues:[(Lefti=Right(i+1))fori=1,...,6]
+[Center1=Center7]+[Right1=Left7=0]
- Constraints to maintain 0.5 terms overlap, for best interpolation
August 24, 2000 49ECAI 2000
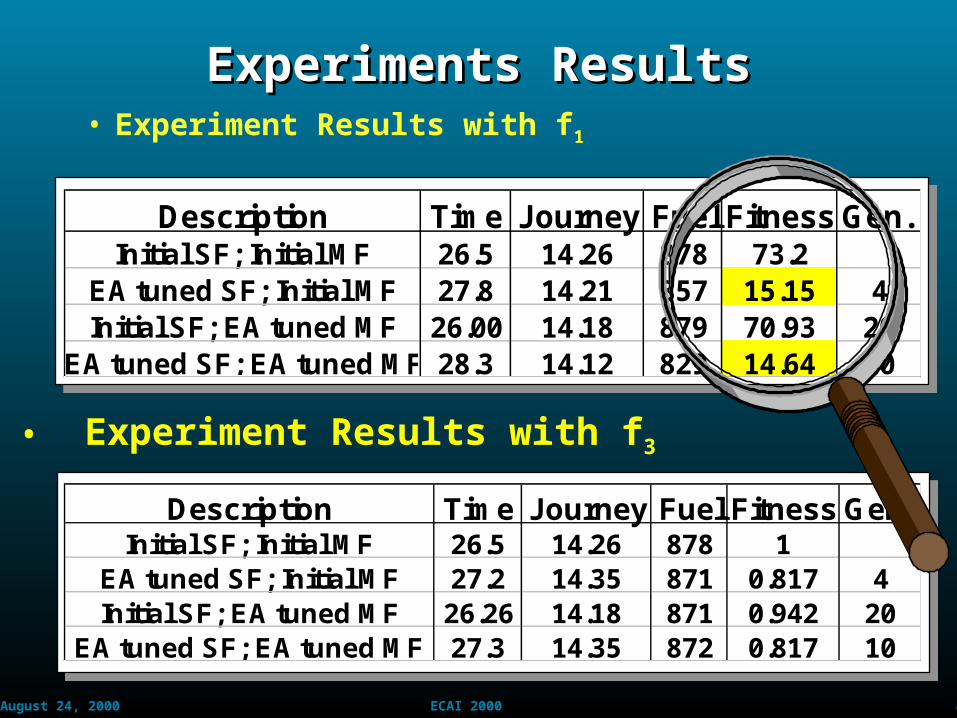
Experiments ResultsExperiments Results• Experiment Results with f1
Description Time Journey Fuel Fitness Gen.Initial SF; Initial MF 26.5 14.26 878 73.2
EA tuned SF; Initial MF 27.8 14.21 857 15.15 4Initial SF; EA tuned MF 26.00 14.18 879 70.93 20
EA tuned SF; EA tuned MF 28.3 14.12 829 14.64 10
• Experiment Results with f3
Description Time Journey Fuel Fitness Gen.Initial SF; Initial MF 26.5 14.26 878 1
EA tuned SF; Initial MF 27.2 14.35 871 0.817 4Initial SF; EA tuned MF 26.26 14.18 871 0.942 20
EA tuned SF; EA tuned MF 27.3 14.35 872 0.817 10
August 24, 2000 50ECAI 2000
Tuning of FLC with EA: RemarksTuning of FLC with EA: Remarks• VerifiedtuningorderproposedbyZheng(92)
»SFtuning:majorimpact»MFtuning:minorimpact»RStuning:almostnoimpact
• Forbothf1andf3,fuelminimizationisimplicitlyderivedfromthrottlejockeyingminimization
• Complexfitnessfunction(requiringsimulationrun-23secforeachchromosomeevaluation)limitedtrialsnumber-withnoapparentimpact
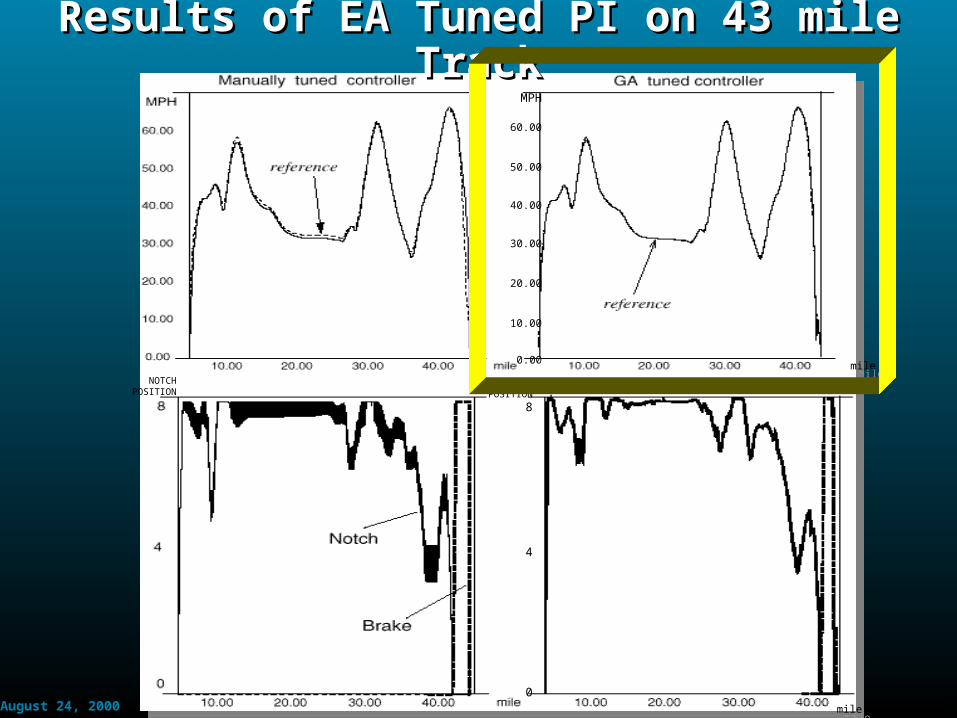
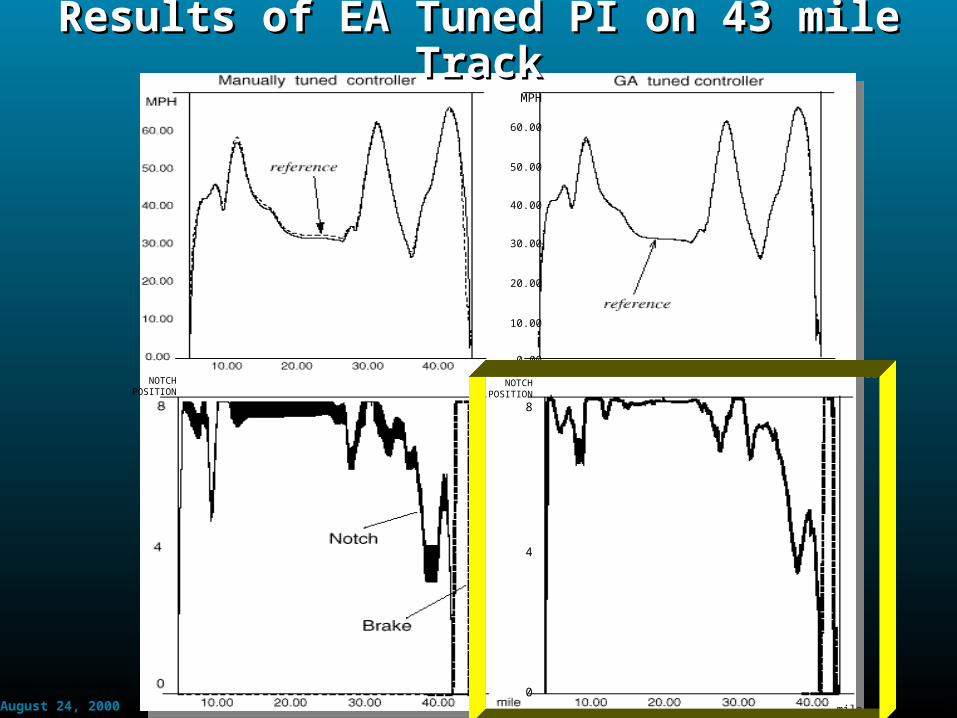
• Successfullytestedonsimulated43milelongtrackwithaltitudeexcursions
» (Selkirk,NY->Framingham,MA)
August 24, 2000 51ECAI 2000
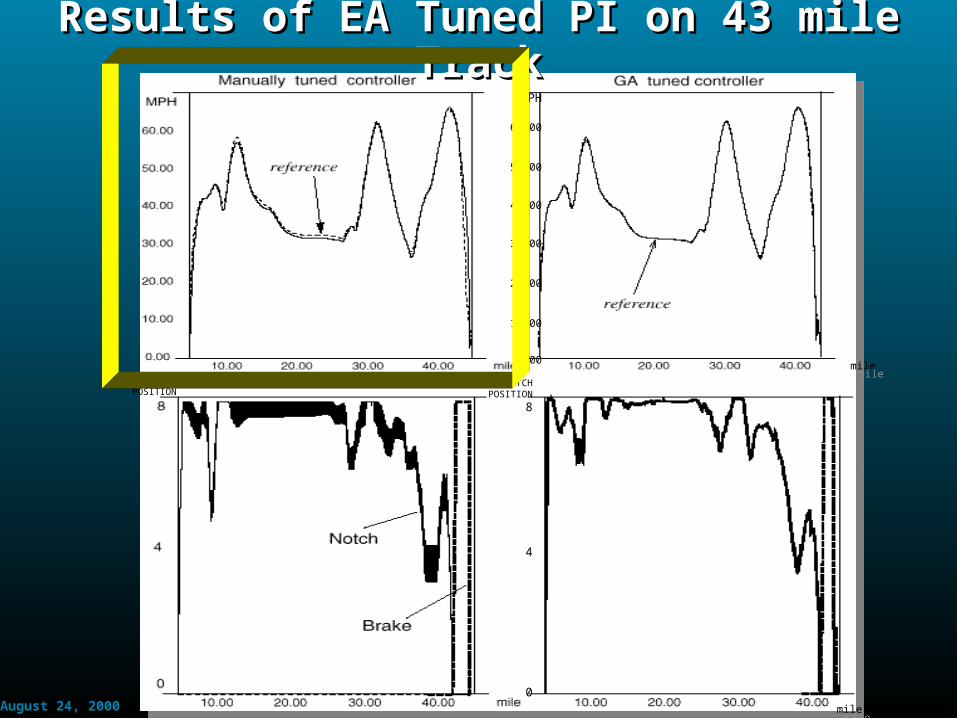
MPH
60.00
50.00
40.00
30.00
20.00
10.00
0.00
NOTCHPOSITION
8
4
0
NOTCH
POSITION
milemile
milemile
Results of EA Tuned PI on 43 mile TrackResults of EA Tuned PI on 43 mile Track
August 24, 2000 52ECAI 2000
MPH
60.00
50.00
40.00
30.00
20.00
10.00
0.00
NOTCHPOSITION
8
4
0
NOTCH
POSITION
milemile
milemile
Results of EA Tuned PI on 43 mile TrackResults of EA Tuned PI on 43 mile Track

August 24, 2000 53ECAI 2000
MPH
60.00
50.00
40.00
30.00
20.00
10.00
0.00
NOTCHPOSITION
8
4
0
NOTCH
POSITION
milemile
milemile
Results of EA Tuned PI on 43 mile TrackResults of EA Tuned PI on 43 mile Track
August 24, 2000 54ECAI 2000
MPH
60.00
50.00
40.00
30.00
20.00
10.00
0.00
NOTCHPOSITION
8
4
0
NOTCH
POSITION
milemile
milemile
Results of EA Tuned PI on 43 mile TrackResults of EA Tuned PI on 43 mile Track
August 24, 2000 55ECAI 2000
• Soft Computing Overview SCComponents:PR,FL,NN,EA
• Modeling with FL and EA
• Hybrid SC Systems-FLCParameterTuningbyEA-EAParameterSetting
• Conclusions
Hybrid SC and EA – Outline (3b)Hybrid SC and EA – Outline (3b)
August 24, 2000 56ECAI 2000
• EA Model:- Structure,Parameters
• EA Parameter Setting- EAParameterTuning- EAParameterControl
• An Application to Agile Manufacturing- Object-levelRepresentationandComplexity
• Solution- FLCKB- StatisticalExperiments- AnalysisandSummaryof1200Experiments
• Remarks
EA Parameter SettingEA Parameter Setting
August 24, 2000 57ECAI 2000
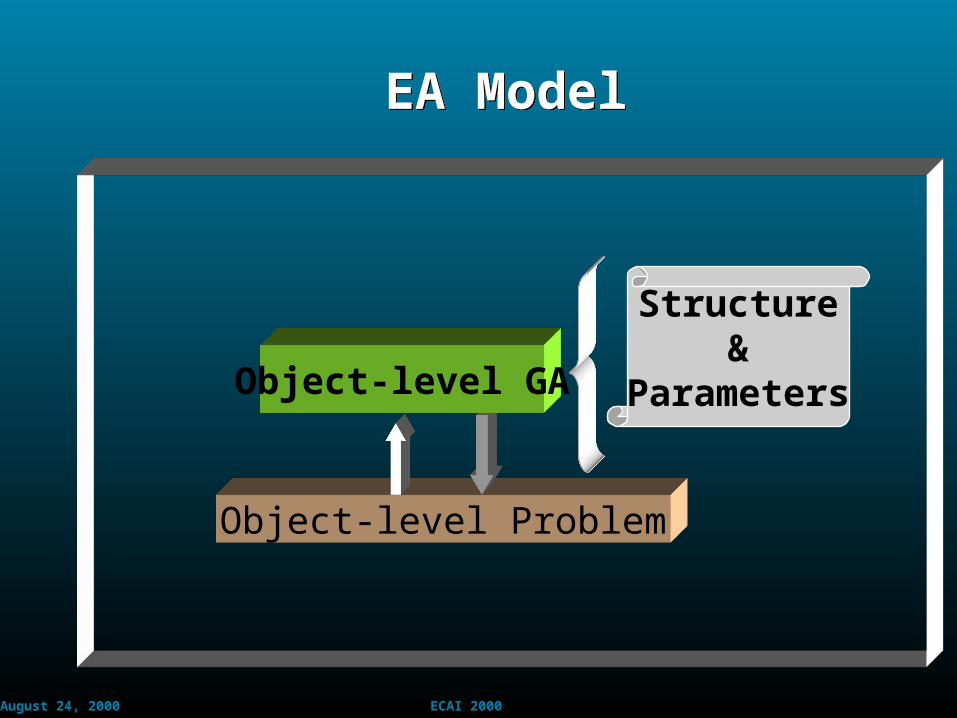
Object-levelProblem
Object-level GA
Structure&
Parameters
EA ModelEA Model
August 24, 2000 58ECAI 2000
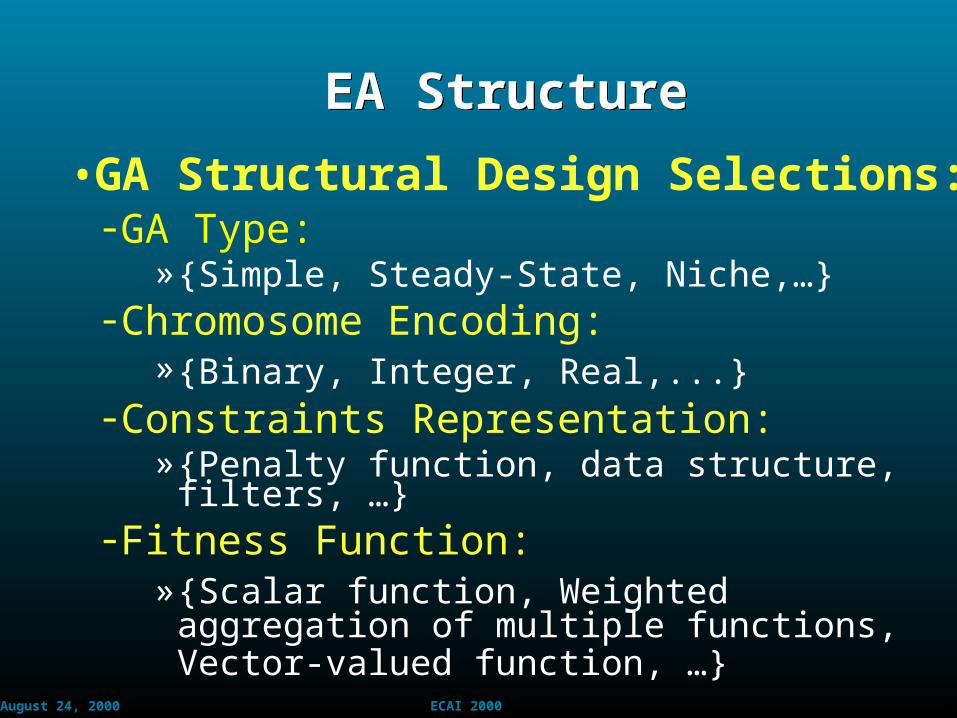
•GA Structural Design Selections:- GAType:
»{Simple,Steady-State,Niche,…}- ChromosomeEncoding:
»{Binary,Integer,Real,...} - ConstraintsRepresentation:
»{Penaltyfunction,datastructure,filters,…}- FitnessFunction:
»{Scalarfunction,Weightedaggregationofmultiplefunctions,Vector-valuedfunction,…}
EA StructureEA Structure
August 24, 2000 59ECAI 2000
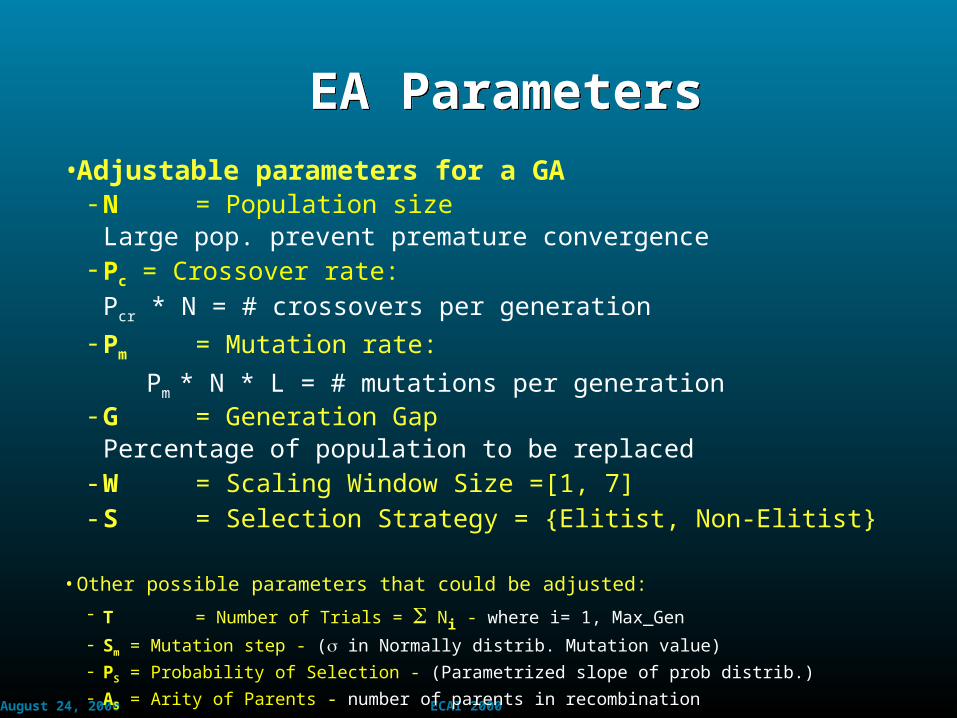
•Adjustable parameters for a GA- N =Populationsize
Largepop.preventprematureconvergence- Pc=Crossoverrate:
Pcr*N=#crossoverspergeneration- Pm =Mutationrate:
Pm*N*L=#mutationspergeneration- G =GenerationGap
Percentageofpopulationtobereplaced- W =ScalingWindowSize=[1,7]- S =SelectionStrategy={Elitist,Non-Elitist}
• Otherpossibleparametersthatcouldbeadjusted:
- T =NumberofTrials=Ni-wherei=1,Max_Gen
- Sm=Mutationstep-(inNormallydistrib.Mutationvalue)
- PS=ProbabilityofSelection-(Parametrizedslopeofprobdistrib.)
- AS=ArityofParents-numberofparentsinrecombination
EA ParametersEA Parameters
August 24, 2000 60ECAI 2000
• EA Model:- Structure,Parameters
• EA Parameter Setting- EAParameterTuning- EAParameterControl
• An Application to Agile Manufacturing- Object-levelRepresentationandComplexity
• Solution- FLCKB- StatisticalExperiments- AnalysisandSummaryof1200Experiments
• Remarks
EA Parameter Setting - OutlineEA Parameter Setting - Outline
August 24, 2000 61ECAI 2000
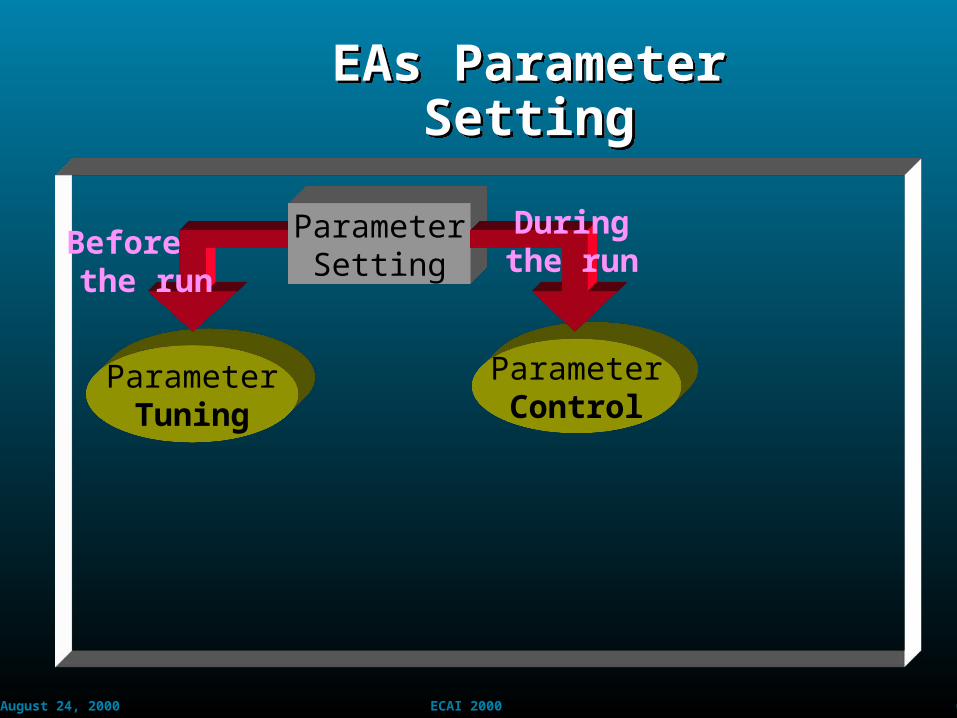
EAs Parameter SettingEAs Parameter Setting
ParameterTuning
Before the run
ParameterControl
ParameterSetting
Duringthe run
August 24, 2000 62ECAI 2000
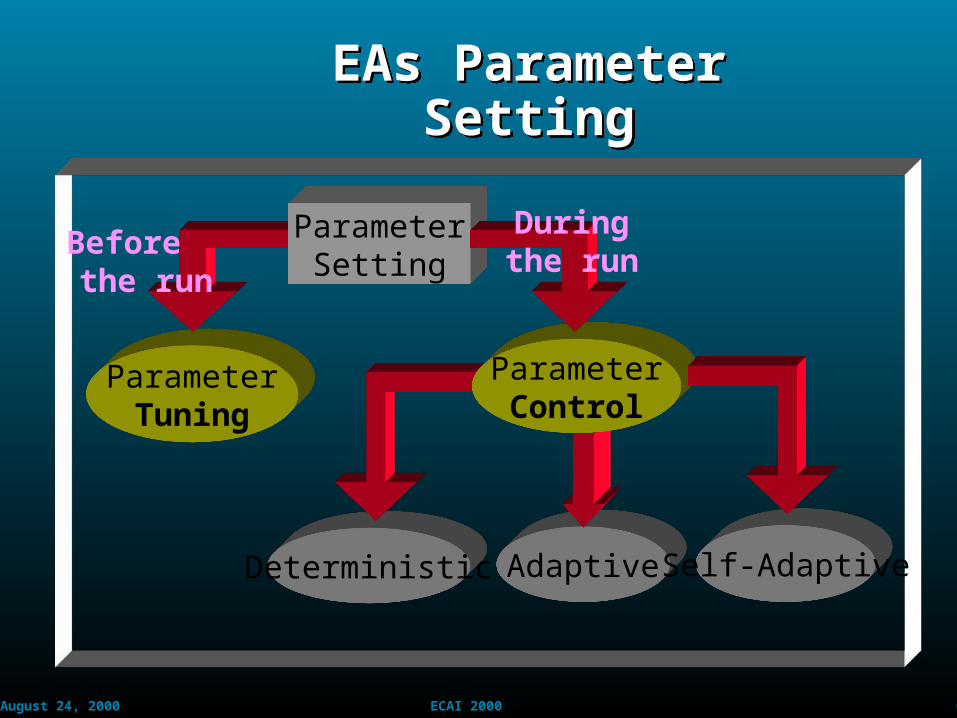
EAs Parameter SettingEAs Parameter Setting
ParameterTuning
AdaptiveDeterministic
Before the run
ParameterControl
Self-Adaptive
ParameterSetting
Duringthe run
August 24, 2000 63ECAI 2000
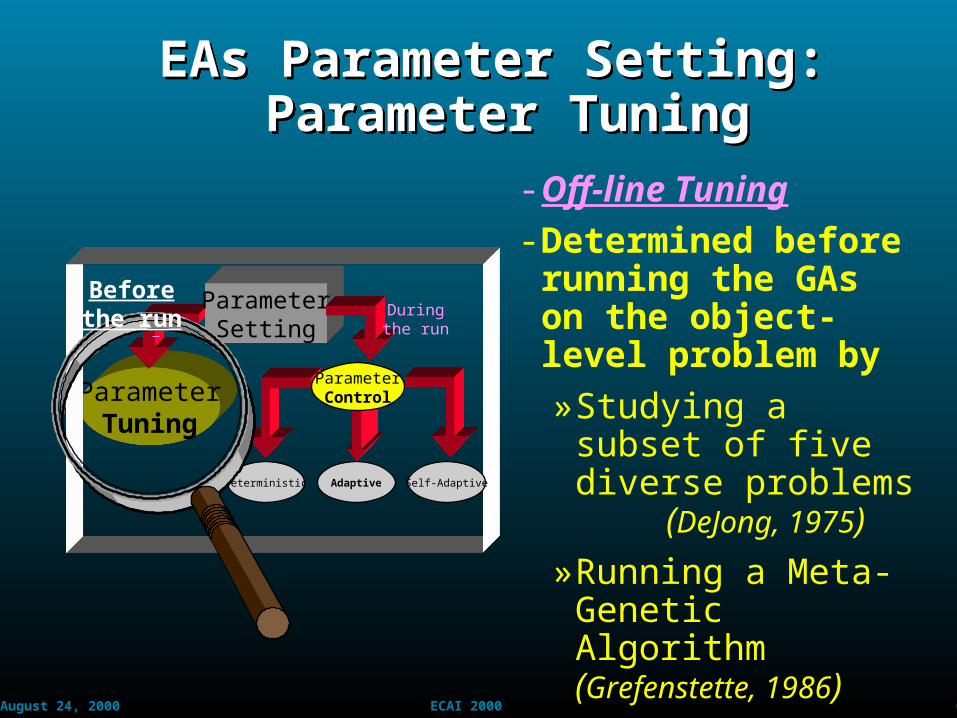
ParameterTuning
EAs Parameter Setting: Parameter Tuning
EAs Parameter Setting: Parameter Tuning
AdaptiveDeterministic
ParameterControl
Self-Adaptive
ParameterSetting
Duringtherun
- Off-line Tuning
- Determined before running the GAs on the object-level problem by
»Studyingasubsetoffivediverseproblems (DeJong, 1975)
»RunningaMeta-GeneticAlgorithm(Grefenstette, 1986)
Beforethe run
August 24, 2000 64ECAI 2000
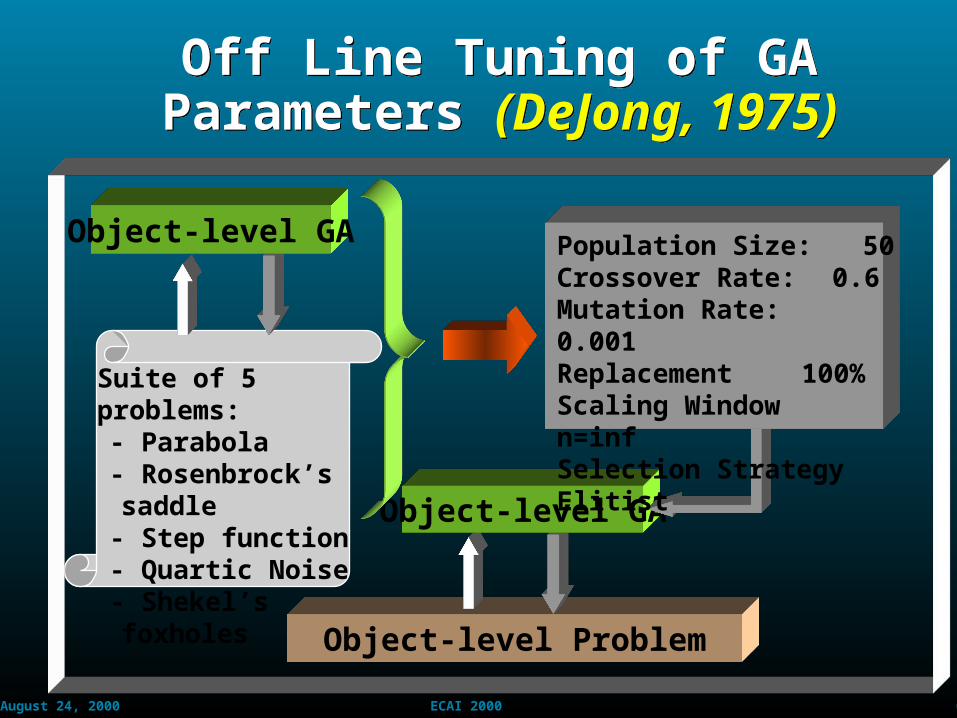
Object-level Problem
Object-level GA
Population Size: 50Crossover Rate: 0.6Mutation Rate: 0.001Replacement 100%Scaling Window n=infSelection Strategy Elitist
Suite of 5 problems:- Parabola- Rosenbrock’s saddle
- Step function- Quartic Noise- Shekel’s foxholes
Object-level GA
Off Line Tuning of GA Parameters (DeJong, 1975)
Off Line Tuning of GA Parameters (DeJong, 1975)
August 24, 2000 65ECAI 2000
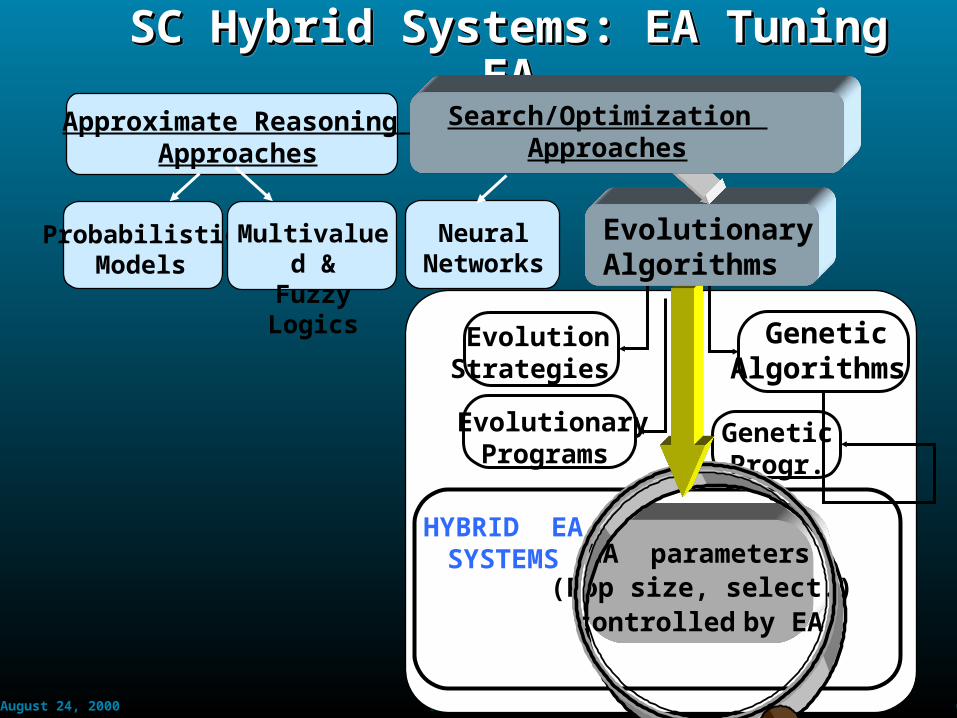
SC Hybrid Systems: EA Tuning EASC Hybrid Systems: EA Tuning EASC Hybrid Systems: EA Tuning EASC Hybrid Systems: EA Tuning EA
Probabilistic Models
Approximate Reasoning Approaches
Multivalued &Fuzzy Logics
NeuralNetworks
EvolutionStrategies
EvolutionaryPrograms
GeneticProgr.
EA parameters (Pop size, select.) controlled by EA
HYBRID EA SYSTEMS
GeneticAlgorithms
EvolutionaryAlgorithms
Search/Optimization Approaches
August 24, 2000 66ECAI 2000
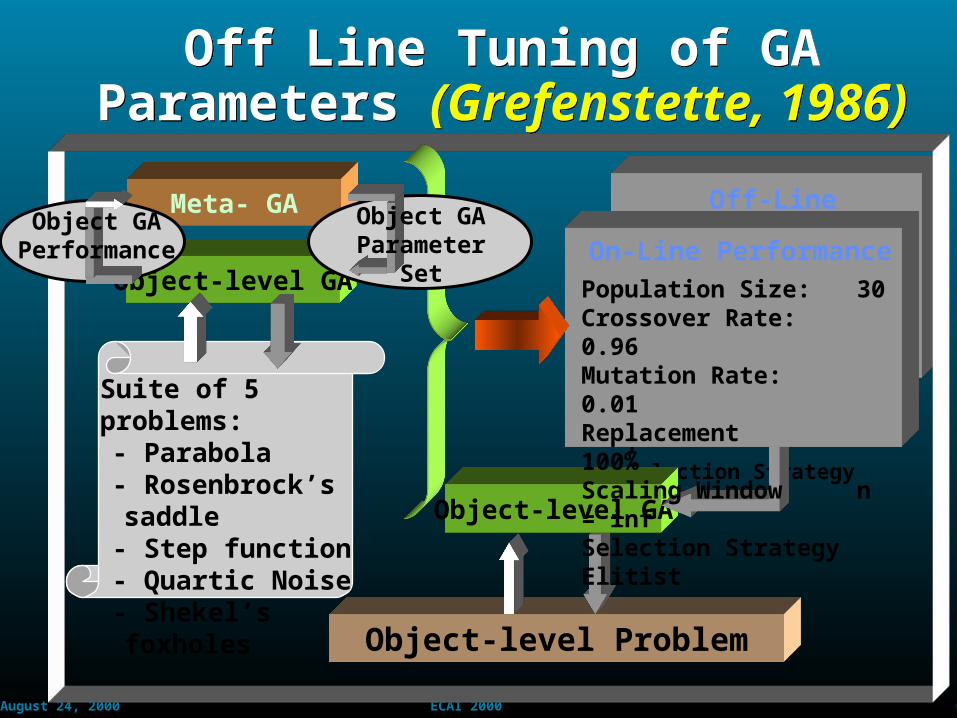
Off-Line PerformancePopulation Size: 80Crossover Rate: 0.45Mutation Rate: 0.01Replacement 90%Scaling Window n = 1Selection Strategy NonElitist
Object-level Problem
Object-level GA
On-Line Performance
Population Size: 30Crossover Rate: 0.96Mutation Rate: 0.01Replacement 100%Scaling Window n = infSelection Strategy Elitist
Object-level GA
Meta- GA
Off Line Tuning of GA Parameters (Grefenstette, 1986)
Off Line Tuning of GA Parameters (Grefenstette, 1986)
Suite of 5 problems:- Parabola- Rosenbrock’s saddle
- Step function- Quartic Noise- Shekel’s foxholes
Object GAParameter
Set
Object GAPerformance
August 24, 2000 67ECAI 2000
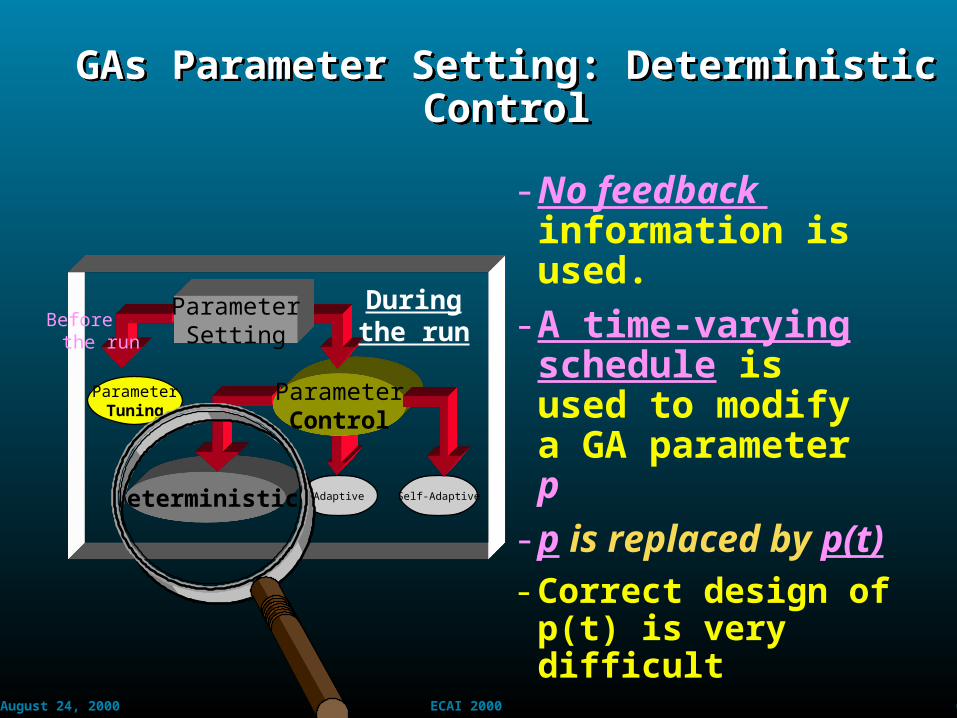
GAs Parameter Setting: Deterministic ControlGAs Parameter Setting: Deterministic Control
AdaptiveDeterministic
ParameterTuning
ParameterControl
Self-Adaptive
Duringthe run
- No feedback information is used.
- A time-varying schedule is used to modify a GA parameter p
- p is replaced by p(t)- Correct design of p(t)
is very difficult
Beforetherun
ParameterSetting
August 24, 2000 68ECAI 2000
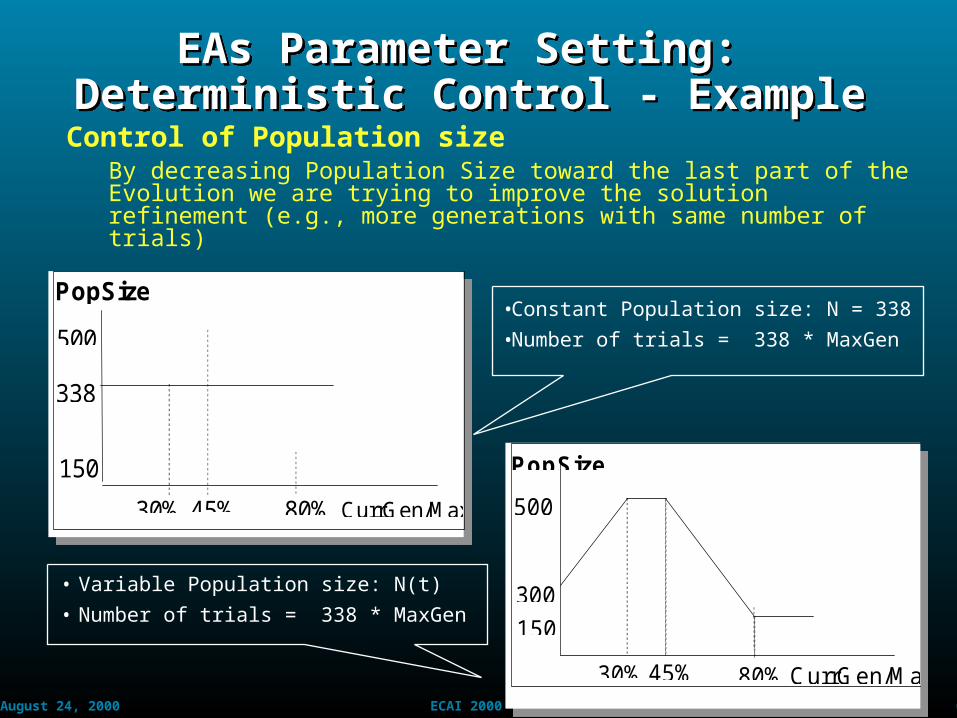
Control of Population sizeBydecreasingPopulationSizetowardthelastpartoftheEvolutionwearetryingtoimprovethesolutionrefinement(e.g.,moregenerationswithsamenumberoftrials)
EAs Parameter Setting: Deterministic Control - Example
EAs Parameter Setting: Deterministic Control - Example
300
500
30% 45% 80% CurrGen/Maxgen
150
PopSize
300
500
30% 45% 80% CurrGen/Maxgen
150
PopSize
338
500
30% 45% CurrGen/Maxgen
150
PopSize
80%
338
500
30% 45% CurrGen/Maxgen
150
PopSize
80%
•ConstantPopulationsize:N=338
•Numberoftrials=338*MaxGen
• VariablePopulationsize:N(t)
• Numberoftrials=338*MaxGen
August 24, 2000 69ECAI 2000
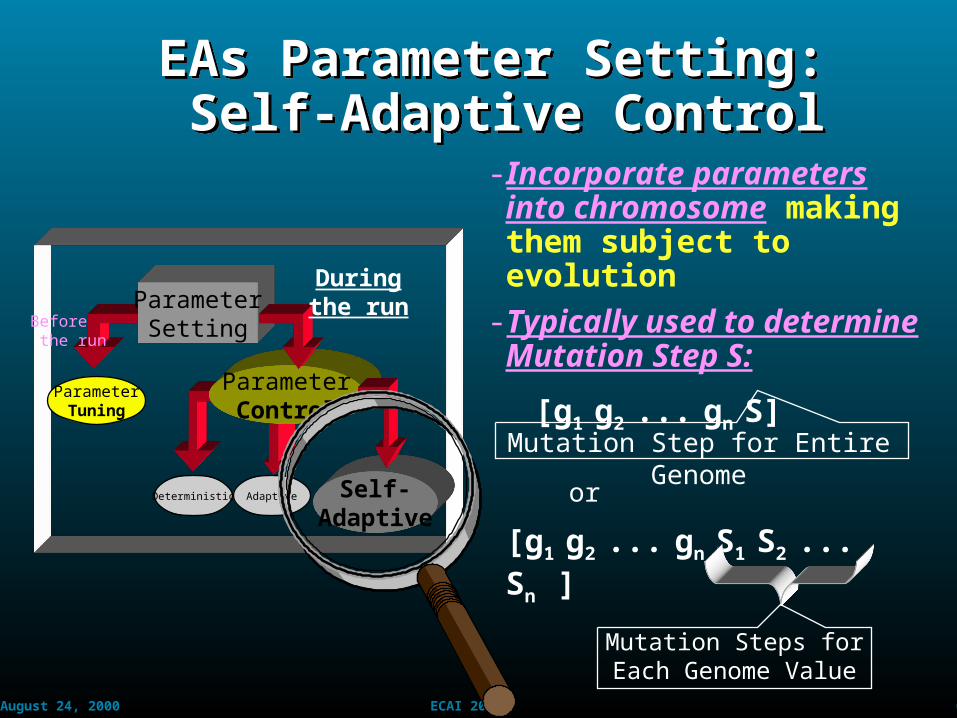
- Incorporate parameters into chromosome making them subject to evolution
- Typically used to determine Mutation Step S:
[g1 g2 ... gn S]
or
[g1 g2 ... gn S1 S2 ... Sn ]
EAs Parameter Setting: Self-Adaptive Control
EAs Parameter Setting: Self-Adaptive Control
AdaptiveDeterministic
Beforetherun
ParameterTuning
ParameterControl
Self-Adaptive
ParameterSetting
MutationStepforEntireGenome
MutationStepsforEachGenomeValue
Duringthe run
August 24, 2000 70ECAI 2000
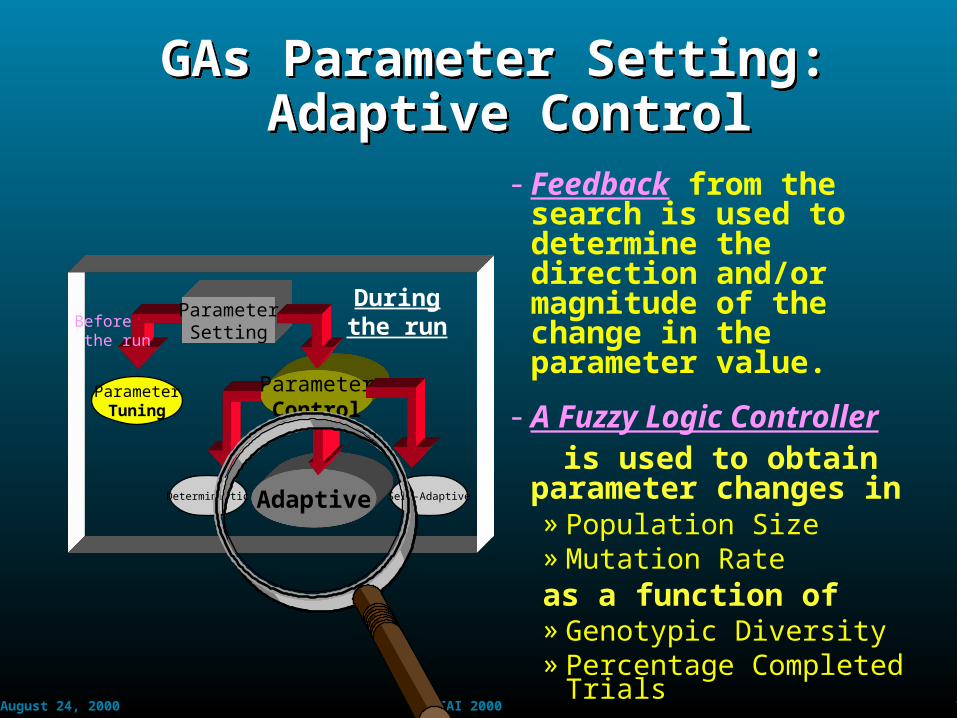
GAs Parameter Setting: Adaptive Control
GAs Parameter Setting: Adaptive Control
AdaptiveDeterministic
Beforetherun
ParameterTuning
ParameterControl
Self-Adaptive
- Feedback from the search is used to determine the direction and/or magnitude of the change in the parameter value.
- A Fuzzy Logic Controller
is used to obtain parameter changes in » PopulationSize» MutationRateas a function of » GenotypicDiversity» PercentageCompletedTrials
Duringthe run
ParameterSetting
August 24, 2000 71ECAI 2000
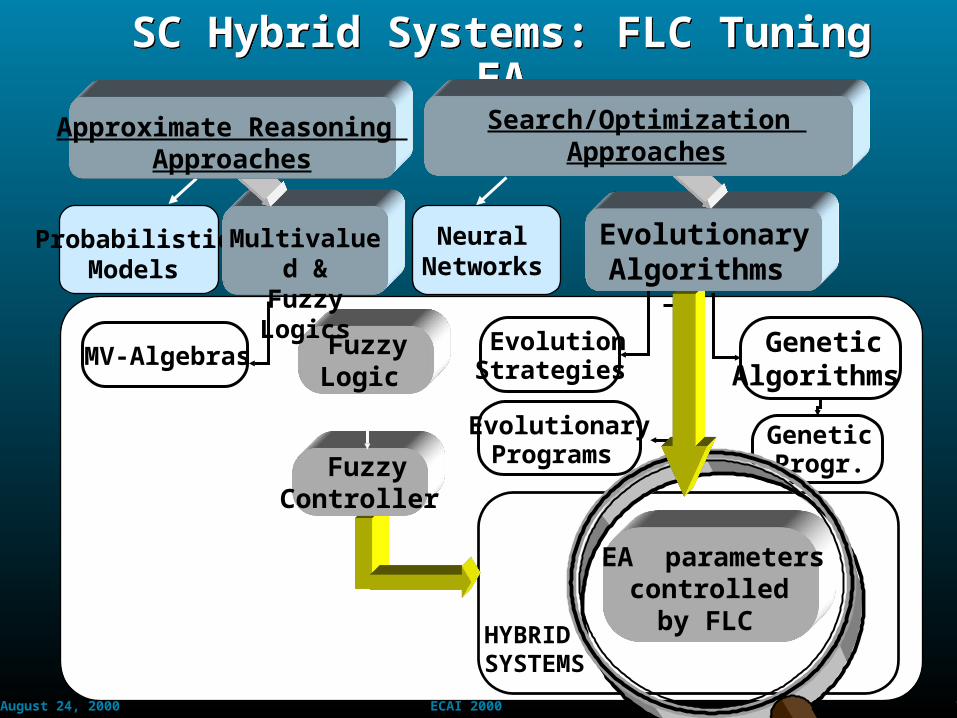
SC Hybrid Systems: FLC Tuning EASC Hybrid Systems: FLC Tuning EA
Probabilistic Models
NeuralNetworks
EvolutionStrategies
EvolutionaryPrograms
GeneticProgr.
EA parameterscontrolled
by FLC HYBRID SYSTEMS
MV-Algebras
FuzzyController
FuzzyLogic
Multivalued &Fuzzy Logics
Approximate Reasoning Approaches
GeneticAlgorithms
EvolutionaryAlgorithms
Search/Optimization Approaches
August 24, 2000 72ECAI 2000
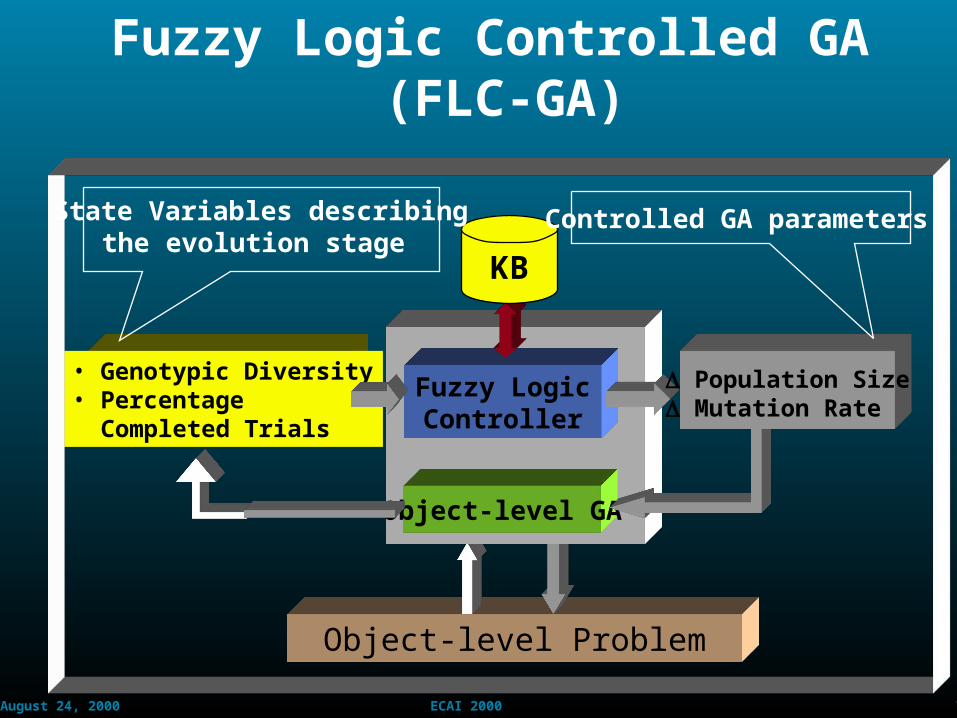
Object-levelProblem
Fuzzy Logic Controlled GA (FLC-GA)
Object-level GA
Fuzzy LogicController
•Genotypic Diversity• Percentage Completed Trials
KB
Population Size Mutation Rate
State Variables describingthe evolution stage
Controlled GA parameters
August 24, 2000 73ECAI 2000
• EA Model:- Structure,Parameters
• EA Parameter Setting- EAParameterTuning- EAParameterControl
• An Application to Agile Manufacturing- Object-levelRepresentationandComplexity
• Solution- FLCKB- StatisticalExperiments- AnalysisandSummaryof1200Experiments
• Remarks
EA Parameter SettingEA Parameter Setting
August 24, 2000 74ECAI 2000
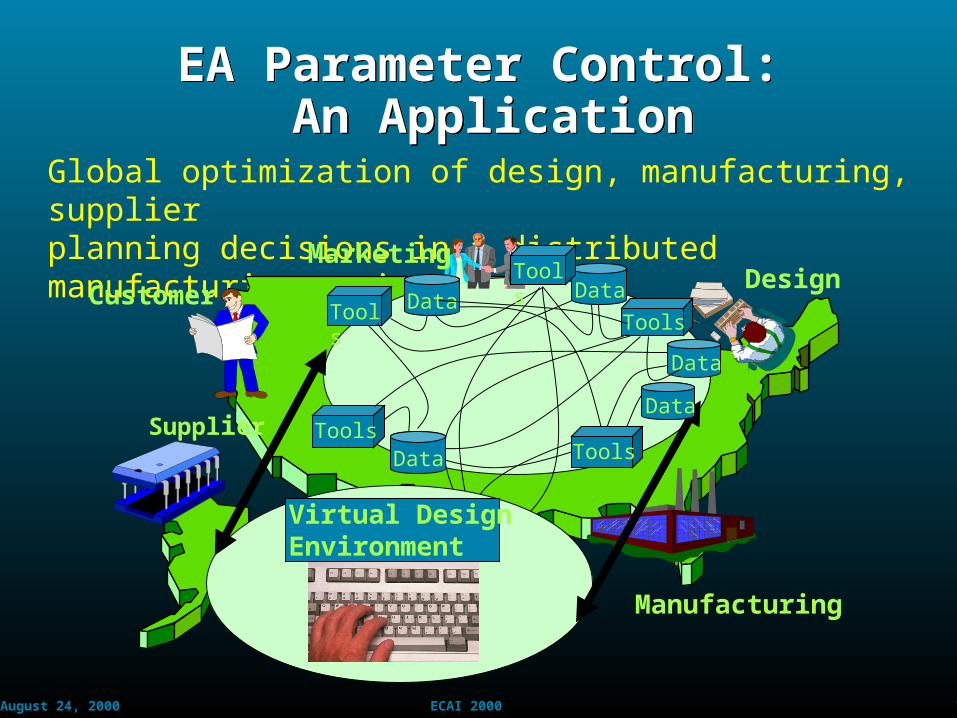
Globaloptimizationofdesign,manufacturing,supplierplanningdecisionsinadistributedmanufacturingenvironment
Customer
Supplier
Manufacturing
Design
Tools
Tools
Data
Marketing
Tools Data
Virtual DesignEnvironment
EA Parameter Control: An Application
EA Parameter Control: An Application
DataTools
Data
Data Tools

August 24, 2000 75ECAI 2000
Design
PartP1
Acceptable Alternates
Suppliers
P1 P2 Pk M
1
2
3
8
Genome
Gen
e A
llel
e S
ets
Crossover Operation Mutation
Parents
Offspring
1
2
3
6PartP2
PartPk
Manufacturing Facilities
Parts, suppliers,and design DB
Mfg. DB
3)10( T
ijTTijij eCJmin
i,j
Object-level Optimization Problem
Object-level Problem RepresentationObject-level Problem Representation
August 24, 2000 76ECAI 2000
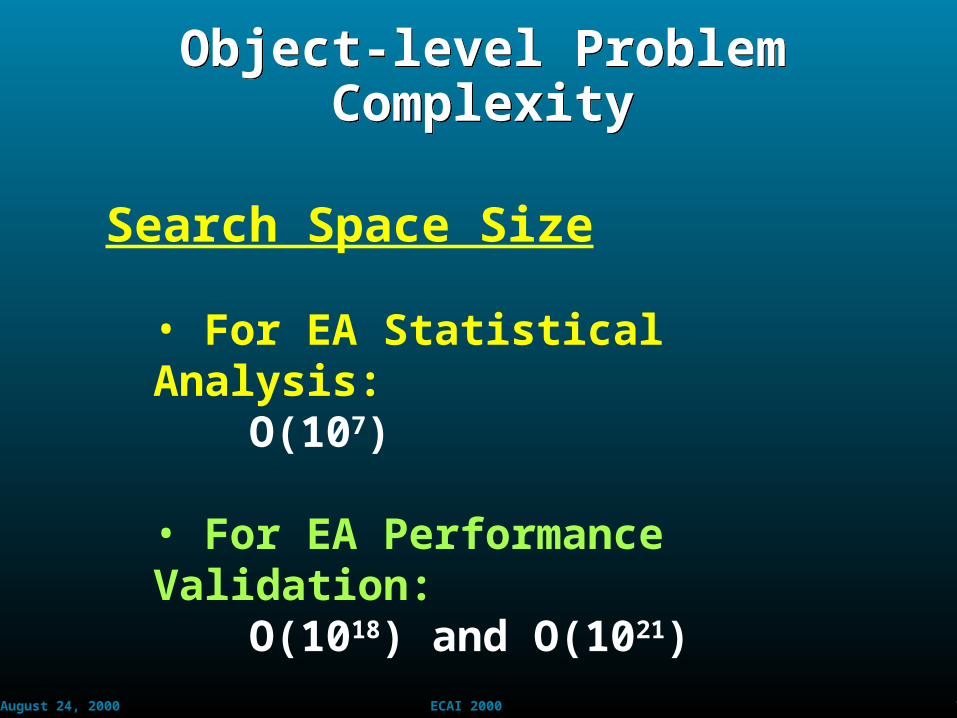
Search Space Size
• For EA Statistical Analysis:O(107)
• For EA Performance Validation:O(1018) and O(1021)
Object-level Problem ComplexityObject-level Problem Complexity
August 24, 2000 77ECAI 2000
• EA Model:- Structure,Parameters
• EA Parameter Setting- EAParameterTuning- EAParameterControl
• An Application to Agile Manufacturing- Object-levelRepresentationandComplexity
• Solution- FLCKB- StatisticalExperiments- AnalysisandSummaryof1200Experiments
• Remarks
EA Parameter Setting - OutlineEA Parameter Setting - Outline
August 24, 2000 78ECAI 2000
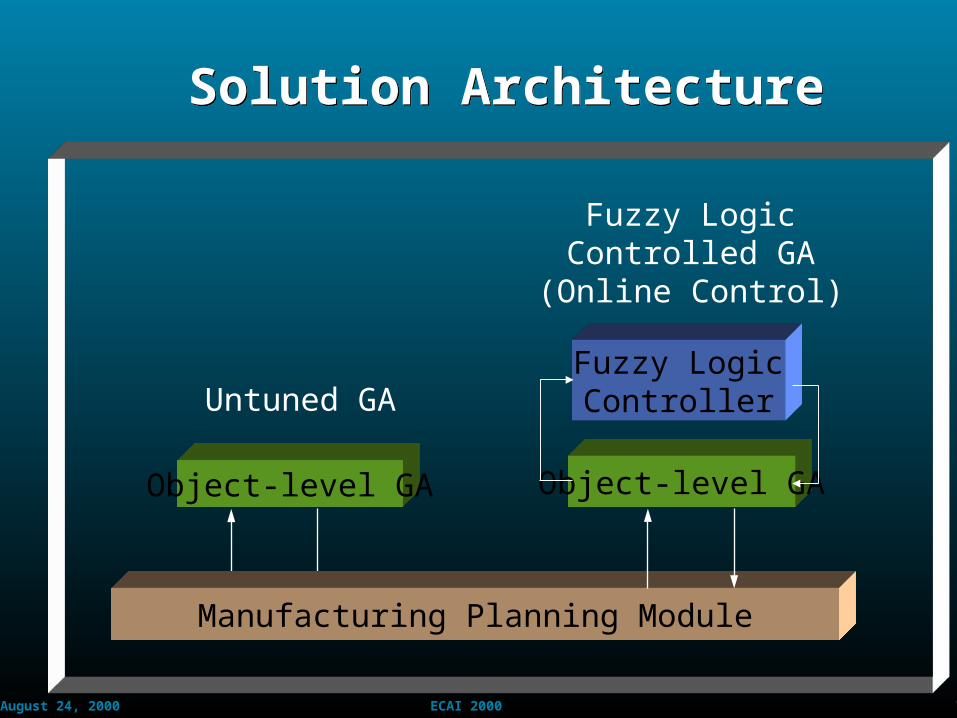
FuzzyLogicController
Solution ArchitectureSolution Architecture
Object-levelGA
ManufacturingPlanningModule
UntunedGA
FuzzyLogicControlledGA(OnlineControl)
Object-levelGA
August 24, 2000 79ECAI 2000
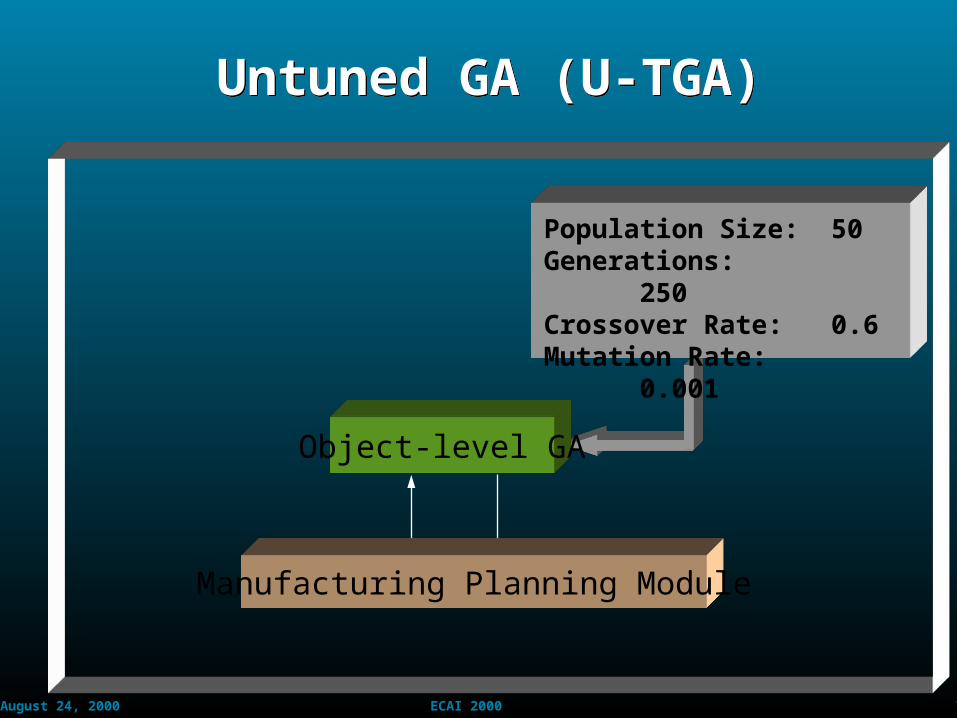
Object-levelGA
ManufacturingPlanningModule
Population Size: 50Generations: 250Crossover Rate: 0.6Mutation Rate: 0.001
Untuned GA (U-TGA)Untuned GA (U-TGA)
August 24, 2000 80ECAI 2000
Guidance for ExperimentsGuidance for Experiments
•Minimize high-level search space size for FLC-EA by
- Identify primary drivers (influences) of EA searchDOE determined that the two main drivers were:
Population Size (N) and Mutation Rate (Pm )
- Control primary drivers by few simple heuristic rulesBuilt two FLC controllers with heuristic rule sets and SFChanged on input (state variable) to capture evolution
stage
• Determining FLC firing rate- Take a control action every 10 generation
• Extensive & statistically significant empirical evidence- Use t-test and F-tests to analyze and improvements
August 24, 2000 81ECAI 2000
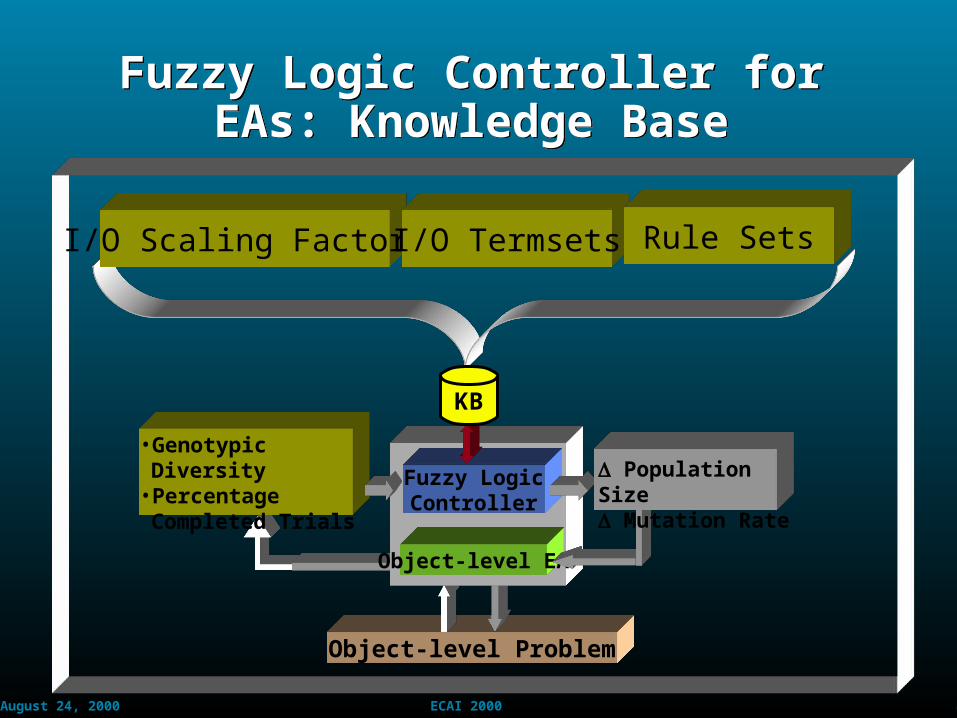
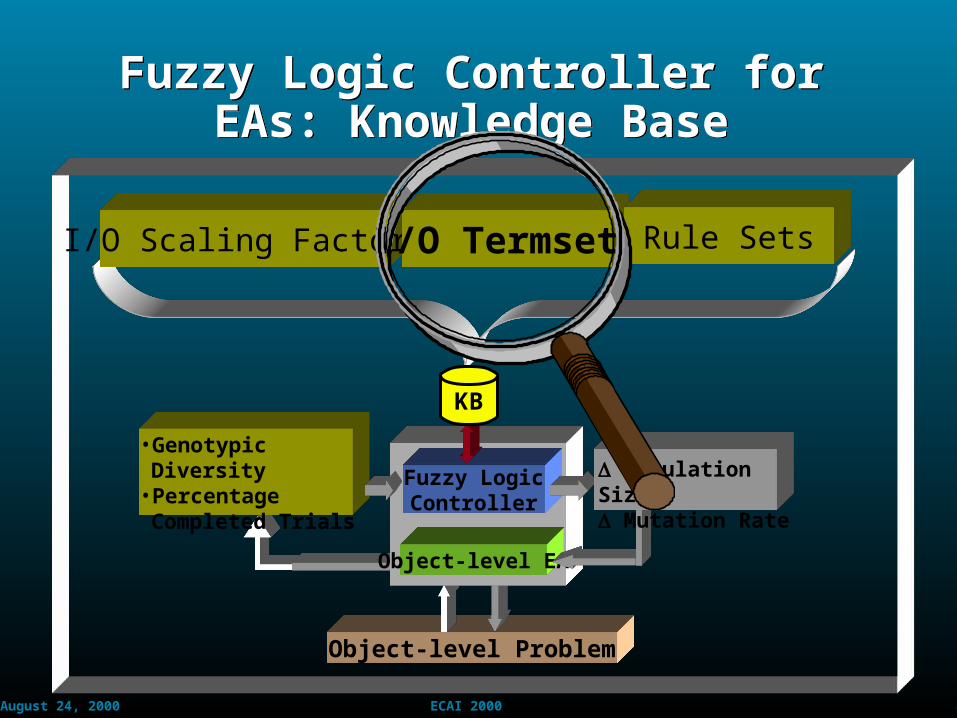
Object-level Problem
Object-level EA
Fuzzy LogicController
• Genotypic Diversity• Percentage
Completed Trials
KB
Population Size Mutation Rate
I/OScalingFactors I/OTermsets RuleSets
Fuzzy Logic Controller for EAs: Knowledge Base
Fuzzy Logic Controller for EAs: Knowledge Base
August 24, 2000 82ECAI 2000
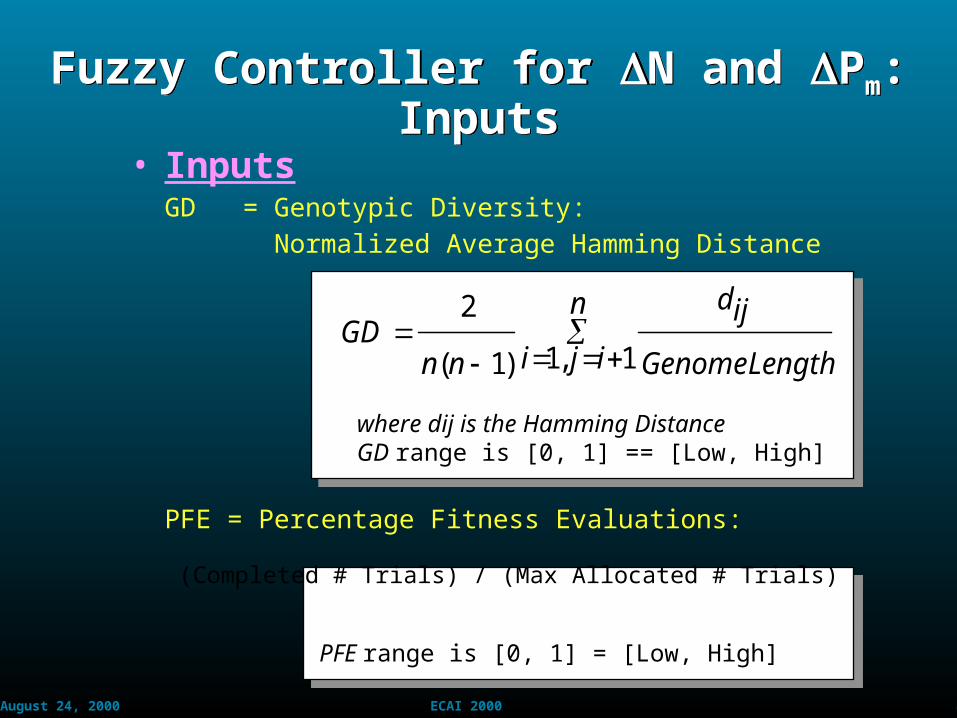
• InputsGD=GenotypicDiversity:
NormalizedAverageHammingDistance
PFE=PercentageFitnessEvaluations:
(Completed#Trials)/(MaxAllocated#Trials)
n
iji LengthGenome
ijd
nnGD
1,1)1(
2
where dij is the Hamming Distance GD rangeis[0,1]==[Low,High]
PFE rangeis[0,1]=[Low,High]
Fuzzy Controller for N and Pm: InputsFuzzy Controller for N and Pm: Inputs
August 24, 2000 83ECAI 2000
Object-level Problem
Object-level EA
Fuzzy LogicController
• Genotypic Diversity• Percentage
Completed Trials
KB
Population Size Mutation Rate
I/OScalingFactors I/O Termsets RuleSets
Fuzzy Logic Controller for EAs: Knowledge Base
Fuzzy Logic Controller for EAs: Knowledge Base

August 24, 2000 84ECAI 2000
•Inputs:• GD: A(Very Low), B(Low), C(Medium), D(High), E(Very High)• PFE: A(Very Low), B(Low), C(Medium), D(High), E(Very High)
•Outputs (for both N and Pm):•A(Neg. High), B(Neg. Medium), C(No Change), D(Pos. Medium), E(Pos. High)
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1A B C D E
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1A B C D E
Fuzzy Controller for N and Pm: Termsets
Fuzzy Controller for N and Pm: Termsets

August 24, 2000 85ECAI 2000
Object-level Problem
Object-level EA
Fuzzy LogicController
• Genotypic Diversity• Percentage
Completed Trials
KB
Population Size Mutation Rate
I/OScalingFactors I/OTermsets Rule Sets
Fuzzy Logic Controller for EAs: Knowledge Base
Fuzzy Logic Controller for EAs: Knowledge Base
August 24, 2000 86ECAI 2000
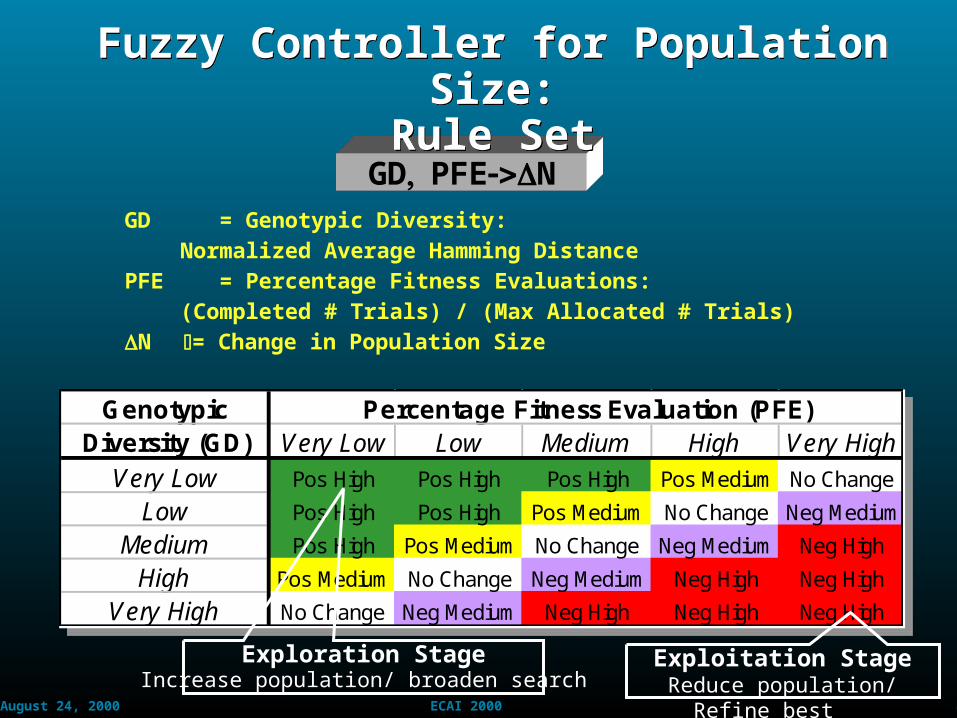
GD = Genotypic Diversity: Normalized Average Hamming Distance
PFE = Percentage Fitness Evaluations: (Completed # Trials) / (Max Allocated # Trials)
N= Change in Population Size
GDPFEN
Genotypic Percentage Fitness Evaluation (PFE)Diversity (GD) Very Low Low Medium High Very High
Very Low PosHigh PosHigh PosHigh PosMedium NoChange
Low PosHigh PosHigh PosMedium NoChange NegMedium
Medium PosHigh PosMedium NoChange NegMedium NegHigh
High PosMedium NoChange NegMedium NegHigh NegHigh
Very High NoChange NegMedium NegHigh NegHigh NegHigh
Genotypic Percentage Fitness Evaluation (PFE)Diversity (GD) Very Low Low Medium High Very High
Very Low PosHigh PosHigh PosHigh PosMedium NoChange
Low PosHigh PosHigh PosMedium NoChange NegMedium
Medium PosHigh PosMedium NoChange NegMedium NegHigh
High PosMedium NoChange NegMedium NegHigh NegHigh
Very High NoChange NegMedium NegHigh NegHigh NegHigh
Exploitation StageReducepopulation/Refinebest
Exploration StageIncreasepopulation/broadensearch
Fuzzy Controller for Population Size:Rule Set
Fuzzy Controller for Population Size:Rule Set
August 24, 2000 87ECAI 2000
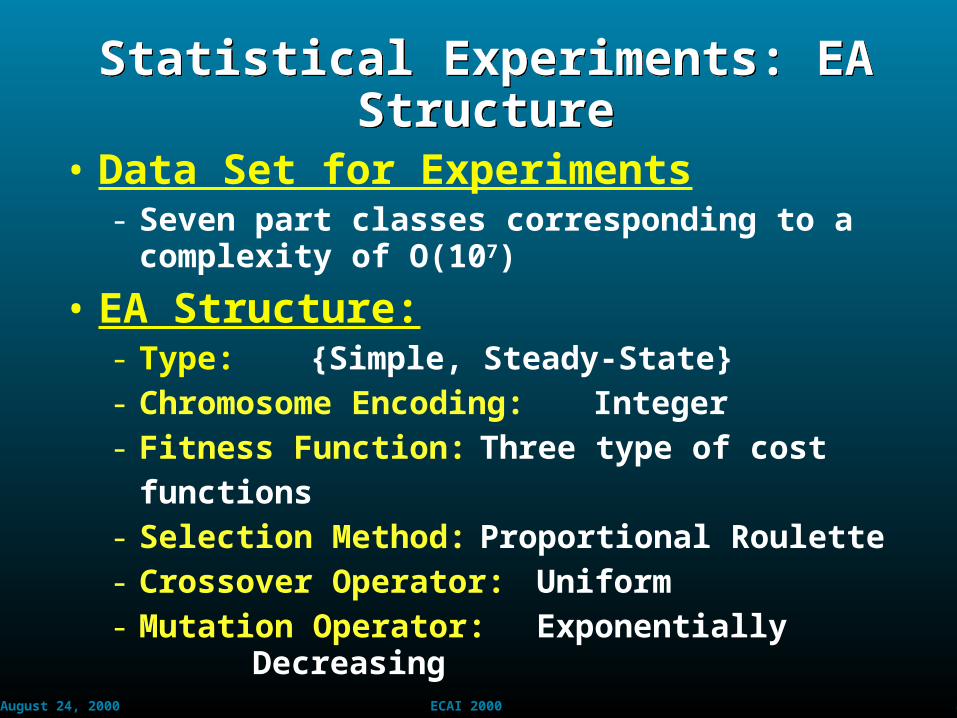
• Data Set for Experiments- Seven part classes corresponding to a
complexity of O(107)
• EA Structure: - Type: {Simple, Steady-State}- Chromosome Encoding: Integer- Fitness Function: Three type of cost
functions- Selection Method: Proportional Roulette- Crossover Operator: Uniform- Mutation Operator: Exponentially
Decreasing
Statistical Experiments: EA StructureStatistical Experiments: EA Structure
August 24, 2000 88ECAI 2000
• Set-Up for 1200 experiments:
- Wedefined4EAconfigurations(a) Untuned Simple EA (U-SEA)(b) FL Controlled Simple EA (FLC-SEA)(c) Untuned Steady State EA (U-SSEA)(d) FL Controlled Steady State EA (FLC-
SSEA)
Statistical Experiments: Set-UpStatistical Experiments: Set-Up
August 24, 2000 89ECAI 2000
• For each configuration we performed 300 experiments: - 20 runs for each pair of (Cost function, Max
number of Trials)- 15 different pairs of (Cost function, Max number
of Trials) - Three types of cost functions:
(1) J = C*T; (2) J = C*T2; (3) J = C*e(T-10)/3
- Five values of maximum number of Trials (to evaluate effect of different evolution lengths):
(i) 3,000; (ii) 5,000; (iii) 7,000; (iv) 9,000; (v) 11,000
Statistical Experiments: Set-Up (cont.)Statistical Experiments: Set-Up (cont.)

August 24, 2000 90ECAI 2000
• For each of the four configurations (a-d) we ran 20 experiments with the same parameters
• Then we considered the following measures:B=sampleaverageover 20 experimentsofBestscorefrequency(numberoftimecostfunctionJreacheditsminimalvalue-knownaprioriforsmallsizeexperiment)
=averageofpopulationbest=standarddeviationofpopulationbest
B
Statistical Experiments: MeasuresStatistical Experiments: Measures
August 24, 2000 91ECAI 2000
• We performed an ANOVA test (botht and F test - with p < 0.05 ) to see if:
Cost (U-SEA) >> cost ( FLCSEA)Cost (U-SEA) >> cost ( U-SSEA)Cost (U-SSEA) >> cost ( FLC-SSEA)
• We verified if the FLC caused the controlled EA to perform worse than its corresponding untuned EA, i.e.:
Cost (U-SEA) << cost ( FLC-SEA)
Cost (U-SSEA) << cost ( FLC-SSEA)
Statistical Experiments: AnalysisStatistical Experiments: Analysis
August 24, 2000 92ECAI 2000
Statistical Experiments: ResultsStatistical Experiments: Results
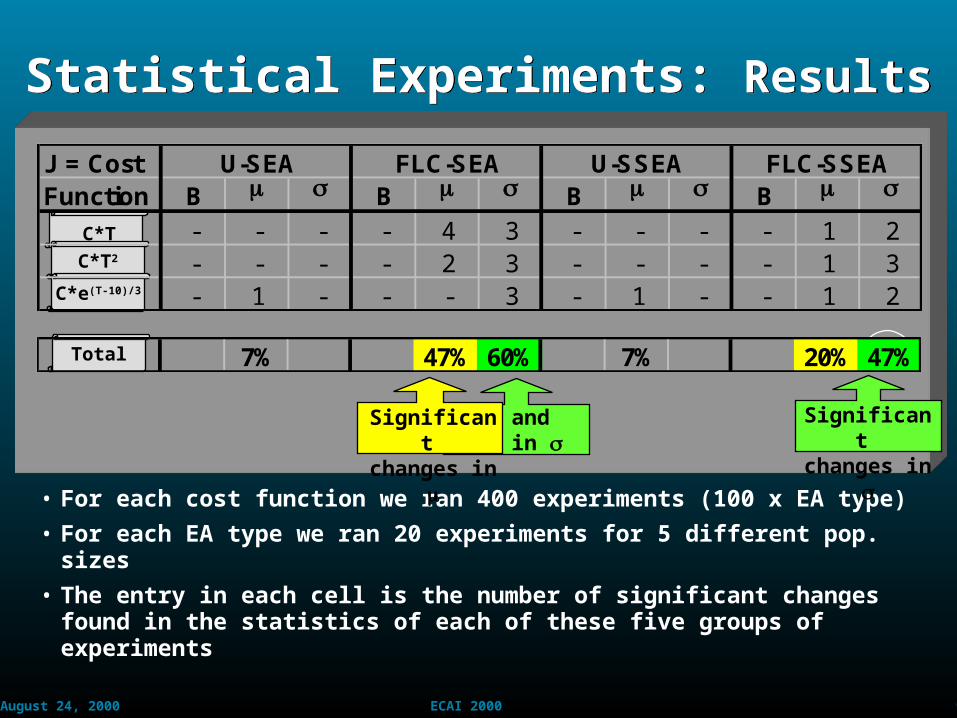
• For each cost function we ran 400 experiments (100 x EA type)
• For each EA type we ran 20 experiments for 5 different pop. sizes
• The entry in each cell is the number of significant changes found in the statistics of each of these five groups of experiments
C*T
C*T2
C*e(T-10)/3
J = Cost U-SEA FLC-SEA U-SSEA FLC-SSEAFunction B B B B
- - - - 4 3 - - - - 1 2- - - - 2 3 - - - - 1 3- 1 - - - 3 - 1 - - 1 2
Significant changes in
Total 7% 47% 60% 7% 20% 47%
Significant changes in
and in
August 24, 2000 93ECAI 2000
• EA Model:- Structure,Parameters
• EA Parameter Setting- EAParameterTuning- EAParameterControl
• An Application to Agile Manufacturing- Object-levelRepresentationandComplexity
• Solution- FLCKB- StatisticalExperiments- AnalysisandSummaryof1200Experiments
• Remarks
EA Parameter SettingEA Parameter Setting
August 24, 2000 94ECAI 2000
RemarksRemarksRemarksRemarks
• FLC State Representation: [Evolution Stage] - Evolution time needs to be an explicit state
variable since we have different control goals during the EA’s stages.
- Diversity measures the evolutionary stage:
» PercentageFitnessEvaluations(PFE)
» GenotypicDiversity(GD)
• FLC Control Variables: [EA Adaptable Parameters]
N= Change in Population Size Pm= Change in Mutation Rate
August 24, 2000 95ECAI 2000
Remarks (cont.)Remarks (cont.)
• Main Result
- By using the FLC with the above State and Control variables, we achieved a good improvement of the population average and an even better improvement of the population variance.
- No major negative effects on EA performance using FLC

August 24, 2000 96ECAI 2000
• Soft Computing Overview SCComponents:PR,FL,NN,EA
• Modeling with FL and EA
• Hybrid SC Systems-FLCParameterTuningbyEA-EAParameterSetting
• Conclusions
Hybrid SC and EA – Outline (4)Hybrid SC and EA – Outline (4)
August 24, 2000 97ECAI 2000
SynergyinSC:Reasons&Approaches
• Hybrid Soft Computing
- Leveragestolerance for imprecision,uncertainty,andincompleteness-intrinsictotheproblemstobesolved
- Generatestractable, low-cost, robustsolutionstosuchproblemsby integrating knowledge and data
• Tight Hybridization
- Data-drivenTuningofKnowledge-derivedModels» Translatedomainknowledgeintoinitialstructureandparameters
» UseGlobalorlocaldatasearchtotuneparameters
- Knowledge-drivenSearchControl» UseGlobalorlocaldatasearchtoderivemodels(Structure+Parameters)
» Translatedomainknowledgeintoanalgorithm’scontrollertoimprove/managesolutionconvergenceandquality
August 24, 2000 98ECAI 2000
SynergyinSC:Reasons&Approaches
• Loose Hybridization (Model Fusion)- Doesnotcombinefeaturesofmethodologies-onlytheirresults
- Theiroutputsarecompared,contrasted,andaggregated,toincreasereliability
• Hybrid Search Methods- Intertwininglocalsearchwithinglobalsearch- Embeddingknowledgeinoperatorsforglobalsearch
• Future:- Circle of SC's related technologies will probably widenbeyonditscurrentconstituents.
- Push for low-costsolutionsand intelligent toolswill resultin deployment of hybrid SC systems that efficiently integrate reasoning and search techniques.

August 24, 2000 99ECAI 2000
August 24, 2000 100ECAI 2000
FL Controllers tuned by EAs (cont.)• Historical Approaches (cont.):
- Kinzel et al. 94:» Chromosome=RuleTable
» Point-radiuscrossoverchanging3x3rulewindow(similartoatwo-pointcrossoverforstring
representation)
» Orderoftuning:– Initializerulebaseaccordingtoheuristics– ApplyGAstofindbestruletable– Tunemembershipfunctionofbestruleset
- Herrera et al. 95:» Chromosome=concatenationofallrules
» Real-valuedencoding,Max-minarithmeticalcrossover
August 24, 2000 101ECAI 2000
Evolutionary Algorithms: ESEvolutionary Algorithms: ES•Evolutionary Strategies (ES)
- Originally proposed for the optimization of continuous functions
- (, )-ES and ( + )-ES» Apopulationofparentsgenerateoffspring» Bestoffspringareselectedinthenextgeneration» (,)-ES:parentsareexcludedfromselection» (+)-ES:parentsareincludedinselection
- Started as (1+1)-ES (Reschenberg) and evolved to ( + )-ES (Schwefel)
- Started with Mutation only (with individual mutation operator) and later added a recombination operator
- Focus on behavior of individuals
August 24, 2000 102ECAI 2000
Evolutionary Algorithms: EPEvolutionary Algorithms: EP
•Evolutionary Programming (EP) - Originally proposed for sequence predictiom
and optimal gaming strategies
- Currently focused on continuous parameter optimization and training of NNs
- Could be considered a special case of ( + )-ES without recombination operator
- Focus on behavior of species (hence no crossover)
- Proposed by Larry Fogel (1963)
August 24, 2000 103ECAI 2000
Evolutionary Algorithms: GAEvolutionary Algorithms: GA•Genetic Algorithms (GA)
- Perform a randomized search in solution space using a genotypic rather than a phenotypic
- Each solution is encoded as a chromosome in a population (a binary, integer, or real-valued string)» Eachstring’selementrepresentsaparticularfeatureofthesolution
- The string is evaluated by a fitness function to determine the solution’s quality» Better-fitsolutionssurviveandproduceoffspring» Less-fitsolutionsareculledfromthepopulation
- Stringsareevolvedusingmutation&recombinationoperators.- Newindividualscreatedbytheseoperatorsformnextgenerationofsolutions
- StartedbyHolland (1962; 1975)
August 24, 2000 104ECAI 2000
Evolutionary Algorithms: GPEvolutionary Algorithms: GP
•Genetic Programming (GP) - A special case of Genetic Algorithms
»Chromosomeshaveahierarchicalratherthanalinearstructure
»Theirsizesarenotpredefined
»Individualsaretree-structuredprograms
»Modifiedoperatorsareappliedtosub-treesorsinglenodes
- ProposedbyKoza (1992)

August 24, 2000 105ECAI 2000
•GA Structural Design Selections:- ParentSelectionMethod:
»{ProportionalRoulette,Tournament,Rank,Uniform,...}
- CrossoverOperator:»{Once-cut,Two-cuts,Uniform,BLX,ParentWeighted,...}
- MutationOperator:»MutationRate:{ExponentiallyDecreasing,Uniform,..}
»Value:{ExponentiallyDecreasing,Uniform,NormallyDistributed,…}
GA Structure (cont.)GA Structure (cont.)
August 24, 2000 106ECAI 2000
•Otherpossibleparametersthatcouldbeadjusted:
- T = Number of Trials = Ni
whereNispopulationsizeandi=1,Max_Gen
= Mutation step
inNormallydistributedMutationvalue
- PS = Probability of Selection
Parametrizedslopeofprobabilitydistribut.
- AS = Arity of Parents
numberofparentsinrecombination
GA Parameters (cont.)GA Parameters (cont.)
August 24, 2000 107ECAI 2000
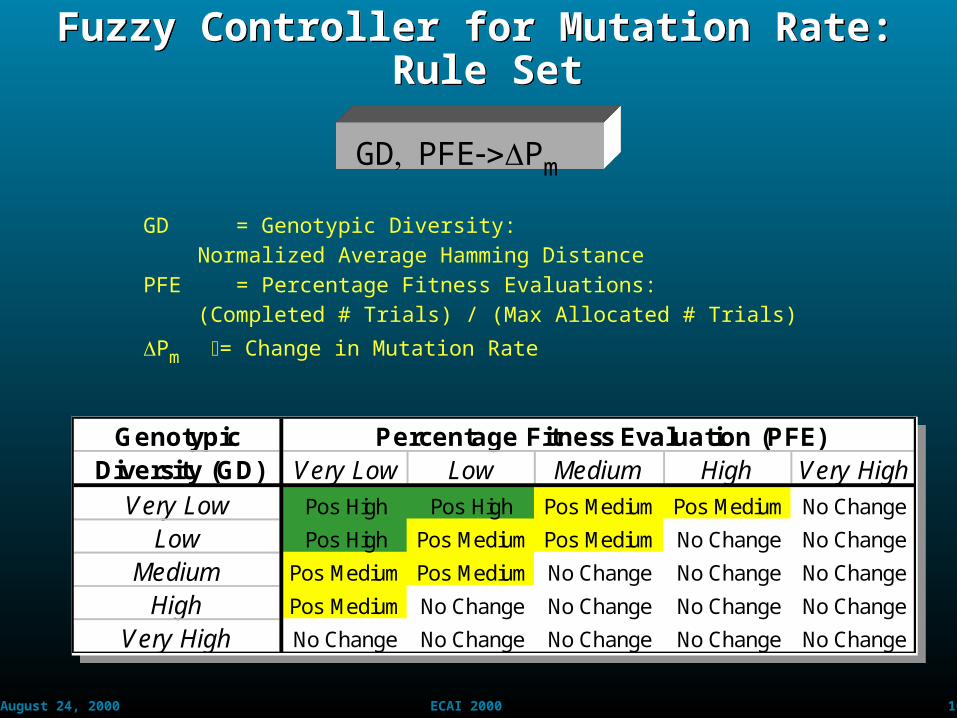
GD =GenotypicDiversity:NormalizedAverageHammingDistance
PFE =PercentageFitnessEvaluations:(Completed#Trials)/(MaxAllocated#Trials)
Pm=ChangeinMutationRate
GDPFEPm
Genotypic Percentage Fitness Evaluation (PFE)Diversity (GD) Very Low Low Medium High Very High
Very Low PosHigh PosHigh PosMedium PosMedium NoChange
Low PosHigh PosMedium PosMedium NoChange NoChange
Medium PosMedium PosMedium NoChange NoChange NoChange
High PosMedium NoChange NoChange NoChange NoChange
Very High NoChange NoChange NoChange NoChange NoChange
Genotypic Percentage Fitness Evaluation (PFE)Diversity (GD) Very Low Low Medium High Very High
Very Low PosHigh PosHigh PosMedium PosMedium NoChange
Low PosHigh PosMedium PosMedium NoChange NoChange
Medium PosMedium PosMedium NoChange NoChange NoChange
High PosMedium NoChange NoChange NoChange NoChange
Very High NoChange NoChange NoChange NoChange NoChange
Fuzzy Controller for Mutation Rate: Rule SetFuzzy Controller for Mutation Rate: Rule Set
August 24, 2000 108ECAI 2000
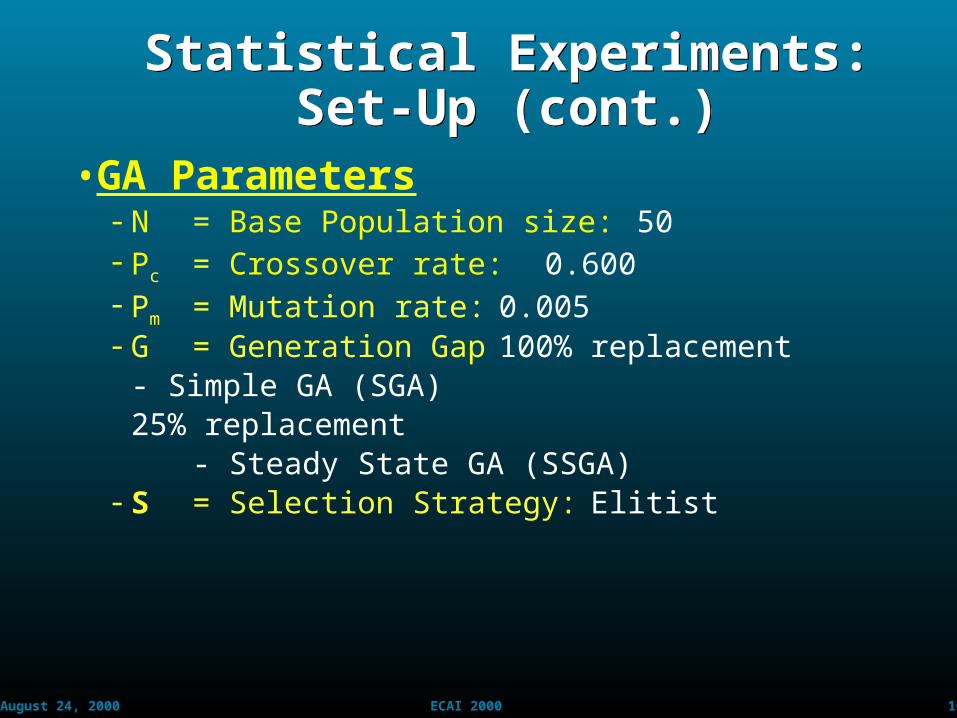
• GA Parameters- N =BasePopulationsize: 50- Pc =Crossoverrate: 0.600- Pm =Mutationrate: 0.005- G =GenerationGap 100%replacement
-SimpleGA(SGA)
25%replacement
-SteadyStateGA(SSGA)
- S =SelectionStrategy: Elitist
Statistical Experiments: Set-Up (cont.)
Statistical Experiments: Set-Up (cont.)
August 24, 2000 109ECAI 2000
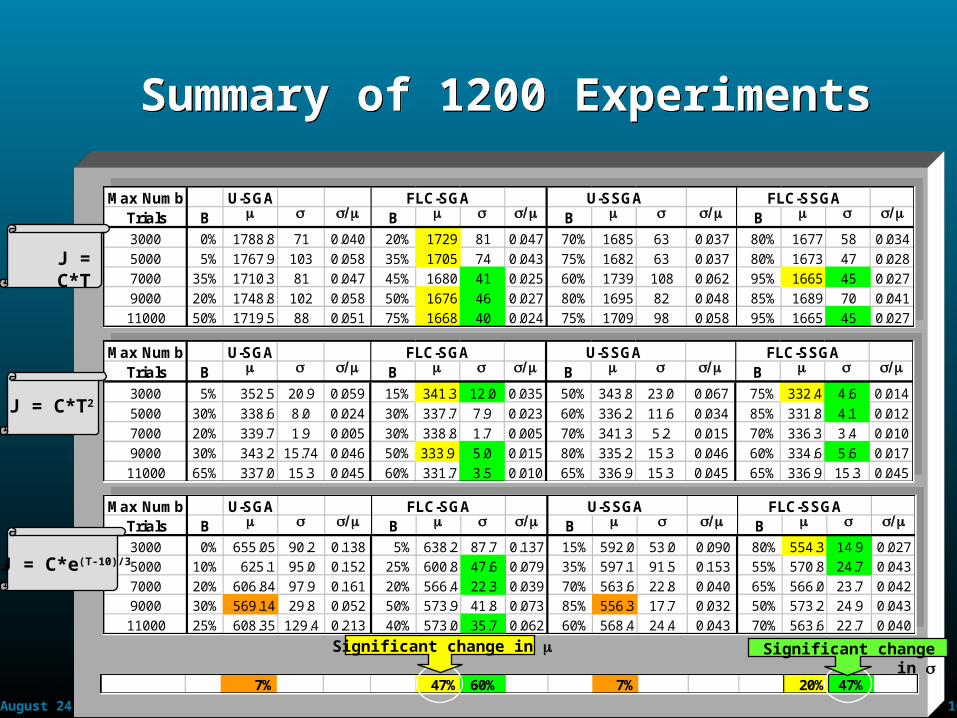
J = C*e(T-10)/3
Summary of 1200 ExperimentsSummary of 1200 Experiments
Max Numb U-SGA FLC-SGA U-SSGA FLC-SSGATrials B B B B
3000 0% 1788.8 71 0.040 20% 1729 81 0.047 70% 1685 63 0.037 80% 1677 58 0.034
5000 5% 1767.9 103 0.058 35% 1705 74 0.043 75% 1682 63 0.037 80% 1673 47 0.028
7000 35% 1710.3 81 0.047 45% 1680 41 0.025 60% 1739 108 0.062 95% 1665 45 0.027
9000 20% 1748.8 102 0.058 50% 1676 46 0.027 80% 1695 82 0.048 85% 1689 70 0.041
11000 50% 1719.5 88 0.051 75% 1668 40 0.024 75% 1709 98 0.058 95% 1665 45 0.027
Max Numb U-SGA FLC-SGA U-SSGA FLC-SSGATrials B B B B
3000 0% 1788.8 71 0.040 20% 1729 81 0.047 70% 1685 63 0.037 80% 1677 58 0.034
5000 5% 1767.9 103 0.058 35% 1705 74 0.043 75% 1682 63 0.037 80% 1673 47 0.028
7000 35% 1710.3 81 0.047 45% 1680 41 0.025 60% 1739 108 0.062 95% 1665 45 0.027
9000 20% 1748.8 102 0.058 50% 1676 46 0.027 80% 1695 82 0.048 85% 1689 70 0.041
11000 50% 1719.5 88 0.051 75% 1668 40 0.024 75% 1709 98 0.058 95% 1665 45 0.027
Max Numb U-SGA FLC-SGA U-SSGA FLC-SSGATrials B B B B
3000 5% 352.5 20.9 0.059 15% 341.3 12.0 0.035 50% 343.8 23.0 0.067 75% 332.4 4.6 0.014
5000 30% 338.6 8.0 0.024 30% 337.7 7.9 0.023 60% 336.2 11.6 0.034 85% 331.8 4.1 0.012
7000 20% 339.7 1.9 0.005 30% 338.8 1.7 0.005 70% 341.3 5.2 0.015 70% 336.3 3.4 0.010
9000 30% 343.2 15.74 0.046 50% 333.9 5.0 0.015 80% 335.2 15.3 0.046 60% 334.6 5.6 0.017
11000 65% 337.0 15.3 0.045 60% 331.7 3.5 0.010 65% 336.9 15.3 0.045 65% 336.9 15.3 0.045
Max Numb U-SGA FLC-SGA U-SSGA FLC-SSGATrials B B B B
3000 5% 352.5 20.9 0.059 15% 341.3 12.0 0.035 50% 343.8 23.0 0.067 75% 332.4 4.6 0.014
5000 30% 338.6 8.0 0.024 30% 337.7 7.9 0.023 60% 336.2 11.6 0.034 85% 331.8 4.1 0.012
7000 20% 339.7 1.9 0.005 30% 338.8 1.7 0.005 70% 341.3 5.2 0.015 70% 336.3 3.4 0.010
9000 30% 343.2 15.74 0.046 50% 333.9 5.0 0.015 80% 335.2 15.3 0.046 60% 334.6 5.6 0.017
11000 65% 337.0 15.3 0.045 60% 331.7 3.5 0.010 65% 336.9 15.3 0.045 65% 336.9 15.3 0.045
Max Numb U-SGA FLC-SGA U-SSGA FLC-SSGATrials B B B B
3000 0% 655.05 90.2 0.138 5% 638.2 87.7 0.137 15% 592.0 53.0 0.090 80% 554.3 14.9 0.027
5000 10% 625.1 95.0 0.152 25% 600.8 47.6 0.079 35% 597.1 91.5 0.153 55% 570.8 24.7 0.043
7000 20% 606.84 97.9 0.161 20% 566.4 22.3 0.039 70% 563.6 22.8 0.040 65% 566.0 23.7 0.042
9000 30% 569.14 29.8 0.052 50% 573.9 41.8 0.073 85% 556.3 17.7 0.032 50% 573.2 24.9 0.043
11000 25% 608.35 129.4 0.213 40% 573.0 35.7 0.062 60% 568.4 24.4 0.043 70% 563.6 22.7 0.040
Max Numb U-SGA FLC-SGA U-SSGA FLC-SSGATrials B B B B
3000 0% 655.05 90.2 0.138 5% 638.2 87.7 0.137 15% 592.0 53.0 0.090 80% 554.3 14.9 0.027
5000 10% 625.1 95.0 0.152 25% 600.8 47.6 0.079 35% 597.1 91.5 0.153 55% 570.8 24.7 0.043
7000 20% 606.84 97.9 0.161 20% 566.4 22.3 0.039 70% 563.6 22.8 0.040 65% 566.0 23.7 0.042
9000 30% 569.14 29.8 0.052 50% 573.9 41.8 0.073 85% 556.3 17.7 0.032 50% 573.2 24.9 0.043
11000 25% 608.35 129.4 0.213 40% 573.0 35.7 0.062 60% 568.4 24.4 0.043 70% 563.6 22.7 0.040
7% 47% 60% 7% 20% 47%
Significant change in Significant change in
J = C*T
J = C*T2
J = C*T2J = C*e(T-10)/3
August 24, 2000 110ECAI 2000
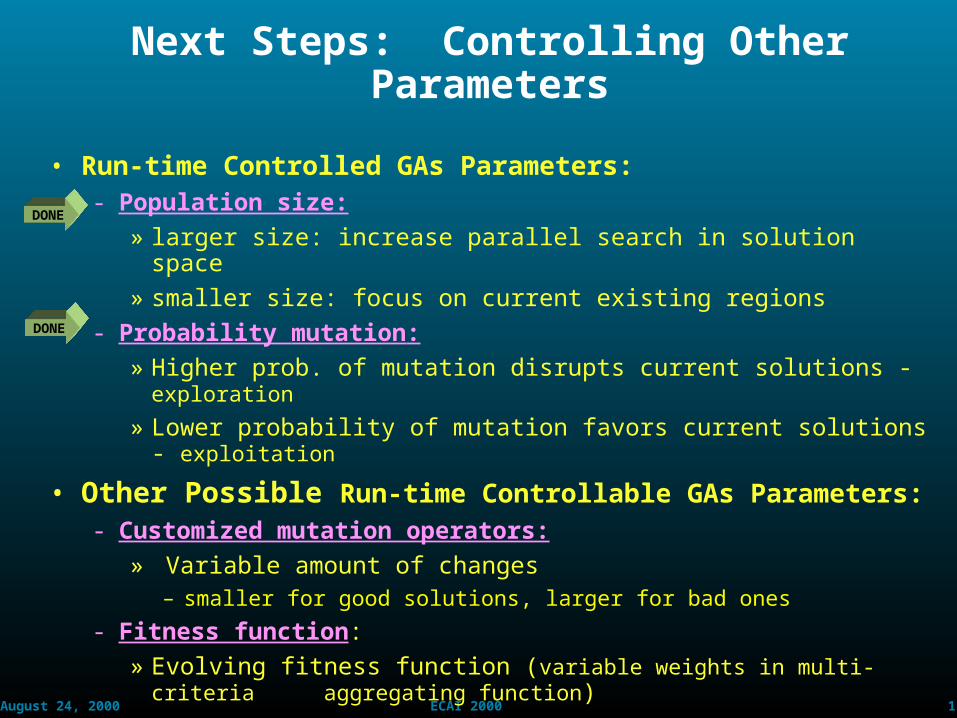
Next Steps: Controlling Other Parameters
• Run-time Controlled GAs Parameters:- Population size:
» largersize:increaseparallelsearchinsolutionspace
» smallersize:focusoncurrentexistingregions
- Probability mutation:
» Higherprob.ofmutationdisruptscurrentsolutions-exploration» Lowerprobabilityofmutationfavorscurrentsolutions-exploitation
• Other Possible Run-time Controllable GAs Parameters:- Customized mutation operators:
» Variableamountofchanges– smallerforgoodsolutions,largerforbadones
- Fitness function:
» Evolvingfitnessfunction(variableweightsinmulti-criteriaaggregatingfunction)
DONE
DONE
August 24, 2000 111ECAI 2000
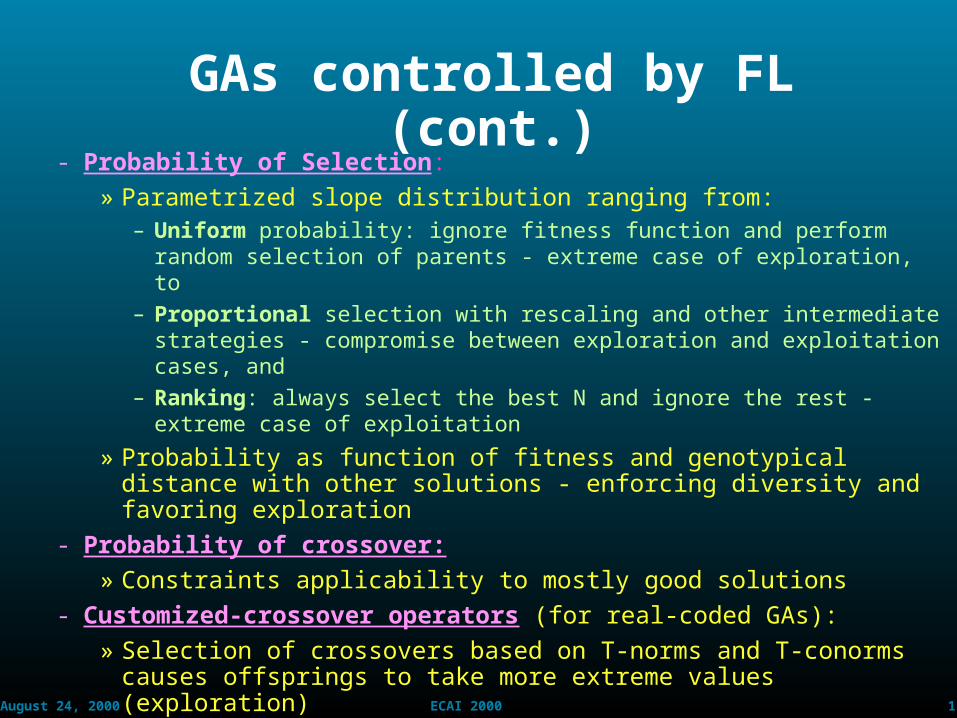
GAs controlled by FL (cont.)- Probability of Selection:
» Parametrizedslopedistributionrangingfrom:– Uniformprobability:ignorefitnessfunctionandperformrandom
selectionofparents-extremecaseofexploration,to
– Proportionalselectionwithrescalingandotherintermediatestrategies-compromisebetweenexplorationandexploitationcases,and
– Ranking:alwaysselectthebestNandignoretherest-extremecaseofexploitation
» Probabilityasfunctionoffitnessandgenotypicaldistancewithothersolutions-enforcingdiversityandfavoringexploration
- Probability of crossover:
» Constraintsapplicabilitytomostlygoodsolutions
- Customized-crossover operators(forreal-codedGAs):
» SelectionofcrossoversbasedonT-normsandT-conormscausesoffspringstotakemoreextremevalues(exploration)
» Selectionofcrossoversbasedonaggregatingoperatorscausesoffspringstotakeaveragevalues(exploitation)

August 24, 2000 112ECAI 2000
Frequency of Control Actions
ControlAction:mutationratechangedevery10generations
populationsizechangeeverygeneration
Mutation Rate
Mutationratesdropsexponentiallyafteracontrolactionthatincreasesit
Inference Engine Parameters
LeftHandSide(LHS)evaluation: Minimum operator
RuleFiring: Minimum operator
RuleOutputAggregation: Maximum operator
Defuzzification: Center of Gravity (COG)
Fuzzy Controller for N and Pm: Control Parameters
Fuzzy Controller for N and Pm: Control Parameters
August 24, 2000 113ECAI 2000
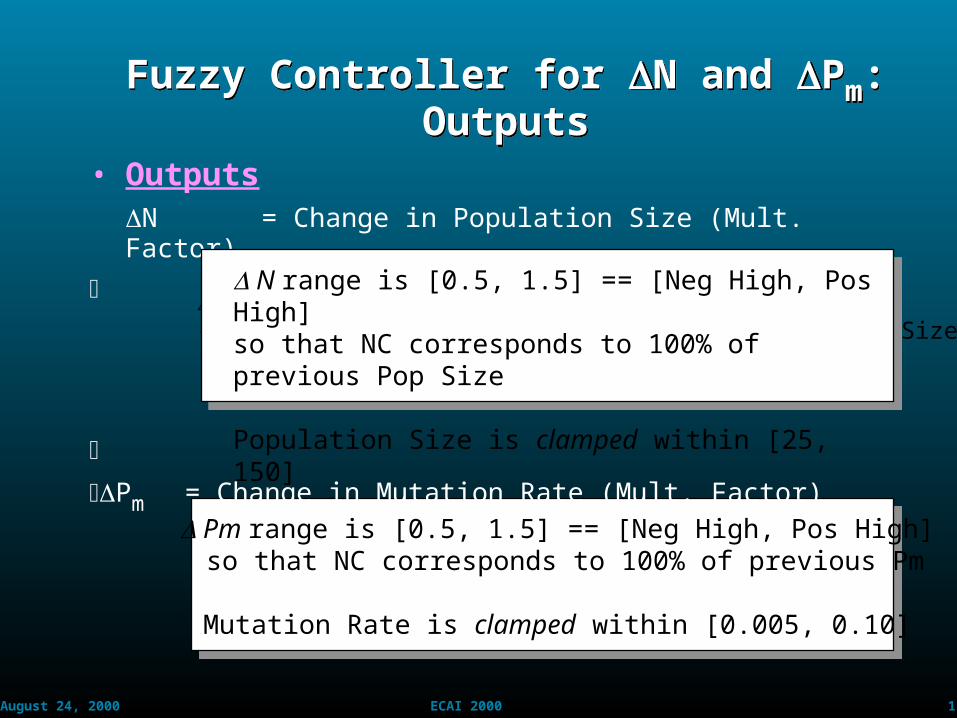
• OutputsN =ChangeinPopulationSize(Mult.Factor)
Pm=ChangeinMutationRate(Mult.Factor)
N range is [0.5, 1.5] == [Neg High, Pos High]- so that NC corresponds to 100% of previous Pop Size
N rangeis[0.5,1.5]==[NegHigh,PosHigh]sothatNCcorrespondsto100%ofpreviousPopSize
PopulationSizeisclampedwithin[25,150]
Pm rangeis[0.5,1.5]==[NegHigh,PosHigh]sothatNCcorrespondsto100%ofpreviousPm
MutationRateisclampedwithin[0.005,0.10]
Fuzzy Controller for N and Pm: OutputsFuzzy Controller for N and Pm: Outputs
August 24, 2000 114ECAI 2000
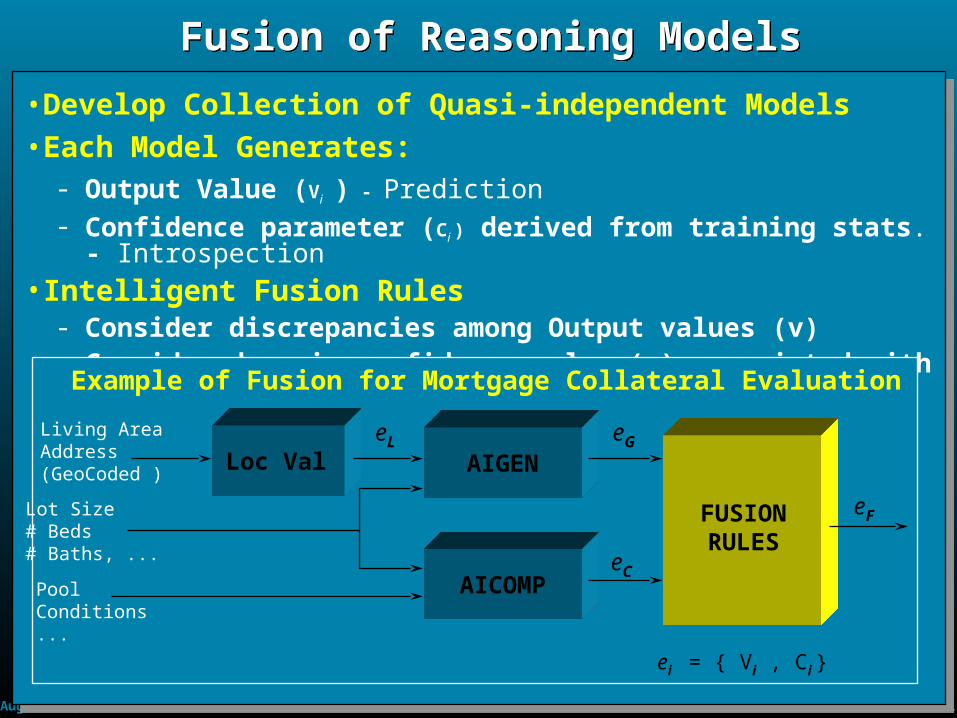
• Develop Collection of Quasi-independent Models
• Each Model Generates:- Output Value(Vi ) - Prediction- Confidence parameter (Ci ) derived from training stats.- Introspection
• Intelligent Fusion Rules- Consider discrepancies among Output values (v)- Consider dynamic confidence value (c) associated with each output
Loc Val AIGEN
AICOMP
FUSIONRULES
LivingAreaAddress(GeoCoded)
LotSize#Beds#Baths,...
PoolConditions...
eL eG
eC
eF
Example of Fusion for Mortgage Collateral Evaluation
ei ={Vi,Ci }
Fusion of Reasoning ModelsFusion of Reasoning Models
August 24, 2000 115ECAI 2000
SynergyinSC:Reasons&Approaches
•SCLeveragesKnowledgeandDatatoDerivetheModel
•Model=Structure+Parameters(&Search)
•Data-drivenTuningofKnowledge-derivedModels-Translatedomainknowledgetoinitialstructure¶meters-UseGlobalorlocaldatasearchtotuneparameters
•Knowledge-drivenSearchControl
-UseGlobalorlocaldatasearchtoderivemodels(Structure+Parameters)
-Translatedomainknowledgeintoanalgorithm’scontrollertoimprove/managesolutionconvergenceandquality
•HybridSearchMethods-Embeddinglocalsearchwithinglobalsearch-Embeddingknowledgeinoperatorsforglobalsearch-Fusionofmodelstoincreaseaccuracyandreliability