in the name of allah decision making by using the theory of evidence students: hossein shirzadeh,...
TRANSCRIPT

1
IN THE NAME OF ALLAH
DECISION MAKING BY USINGTHE THEORY OF EVIDENCE
STUDENTS:HOSSEIN SHIRZADEH, AHAD OLLAH EZZATI
SUPERVISOR:Prof. BAGERI SHOURAKI
SPRING 2009

2
OUTLINES
INTRODUTION
BELIEF
FRAMES OF DISCERNMENT
COMBINIG THE EVIDENCE
ADVANTAGES OF DS THEORY
DISADVANTAGES OF DS THEORY
BASIC PROBABLITY ASSIGNMENT
BELIEF FUNCTIONS
DEMPSTER RULE OF COMBINATION
ZADEH’S OBJECTION TO DS THEORY
GENERALIZED DS THEORY
AN APPLICATION OF DECISION MAKING METHOD

3
INTRODUCTION
Introduced by Glenn Shafer in 1976“A mathematical theory of evidence”
A new approach to the representation of uncertainty
What means uncertainty? Most people don’t like uncertainty
ApplicationsExpert systemsDecision makingImage processing, project planning,
risk analysis,…

4
INTRODUCTION
All students of partial belief have tied it to Bayesian theory and
I. Committed to the value of idea and
defend it
II. Rejected the theory (Proof of
inviability)

5
• : Finite set• Set of all subsets :•
• Then Bell is called belief function on
INTRODUCTIONBELIEF FUNCTION
2]1,0[2: Bel
)...()1(...)()(
)...()3(
1)()2(
0)()1(
11
1
nn
jijii
i
n
BelBelBel
Bel
Bel
Bel

6
INTRODUCTIONBELIEF FUNCTION
is called simple support function if
There exists a non-empty subset A of and that
]1,0[2: Bel
0 1s
0
( )
1
if B does not contain A
Bell B s if B contain A but B
if B

7
INTRODUCTIONTHE IDEA OF CHANCE
For several centuries the idea of numerical degree of belief has been identified with the idea of chance.
Evidence Theory is intelligible only if we reject this unification
Chance : A random experiment : unknown outcome The proportion of the time that a particular one
the possible outcomes tends to occur

8
INTRODUCTIONTHE IDEA OF CHANCE
]1,0[: q
1)( x
xq
• Chance density– Set of all possible outcomes :X– Chance q(x) specified for each possible
outcome
– A chance density must satisfy :

9
• Chance function– Proportion of time that the actual
outcome tends to be in a particular subset of X.
– Ch is a chance function if and only it obeys the following
INTRODUCTIONTHE IDEA OF CHANCE
Ux
xqUCh )()(
)()()(
,)3(
1)()2(
0)()1(
VChUChVUChthen
VUandVUif
Ch
Ch

10
INTRODUCTIONCHANCES AS DEGREES OF BELIEF
• If we know the chances then we will surely adopt them as our degrees of belief
• We usually don’t know the chances– We have little idea about what
chance density governs a random experiment
– Scientist is interested in a random experiment precisely because it might be governed by any one of several chance densities
11
INTRODUCTIONCHANCES AS DEGREES OF BELIEF
• Chances : – Features of the world
• This is the way shafer addresses chance
– Features of our knowledge or belief• Simon Laplace
– Deterministic
• Since the advent of Quantum mechanics this view has lost it’s grip on physics

12
INTRODUCTIONBAYESIAN THEORY OF PARTIAL BELIEF
• Very Popular theory of partial belief– Called Bayesian after Thomas Bayes
• Adapts the three basic rules for chances as rules for one’s degrees of belief based on a given body of evidence.
• Conditioning : changing one’s degree of belief when that evidence is augmented by the knowledge of a particular proposition

13
INTRODUCTIONBAYESIAN THEORY OF PARTIAL BELIEF
(1) ( ) 0
(2) ( ) 1
(3) , ) ( ) ( )
Bel
Bell
If A B then Bell A B Bell A Bell B
:2 [0, 1]Bell obey s
When we learn that is true thenA
( )(4) ( )
( )A
Bell A BBell B
Bell A

14
INTRODUCTIONBAYESIAN THEORY OF PARTIAL BELIEF
• The Bayesian theory is contained in Shafer’s evidence theory as a restrictive special case.
• Why is Bayesian Theory too restrictive?– The representation of Ignorance– Combining vs. Conditioning

15
INTRODUCTIONBAYESIAN THEORY OF PARTIAL BELIEF
THE REPRESENTATION OF IGNORANCEIn Evidence Theory• Belief functions
– Little evidence:• Both the proposition and it’s
negation have very low degrees of belief
– Vacuous belief function
Aif
AifABel
1
0)(

16
INTRODUCTIONBAYESIAN THEORY OF PARTIAL BELIEFCOMBINATION VS. CONDITIONING
• Dempster rule– A method for changing prior opinion in
the light of new evidence• Deals symmetrically with the new
and old evidence
• Bayesian Theory– Bayes rule of conditioning
• No Obvious symmetry • Must assume exact and full effect of
the new evidence is to establish a single proposition with certainty

17
• In Bayesian Theory:– Can not distinguish between lack of belief and
disbelief– can not be low unless is high– Failure to believe A necessitates accordance of belief
to
– Ignorance represented by :
– Important factor in the decline of Bayesian ideas in the nineteenth century
– In DS theory
INTRODUCTIONBAYESIAN THEORY OF PARTIAL BELIEFTHE REPRESENTATION OF IGNORANCE
)(ABel
( )Bel AA
1( ) ( )
2Bel A Bel A
1 A)Bel(Bel(A)

BELIEF
The belief in a particular hypothesis is denoted by a number between 0 and 1
The belief number indicates the degree to which the evidence supports the hypothesis
Evidence against a particular hypothesis is considered to be evidence for its negation (i.e., if Θ = {θ1, θ2, θ3}, evidence against
{θ1} is considered to be evidence for {θ2,
θ3}, and belief will be allotted accordingly)18

FRAMES OF DISCERNMENT
Dempster - Shafer theory assumes a fixed, exhaustive set of mutually exclusive events
Θ = {θ1, θ2, ..., θn}
Same assumption as probability theory
Dempster - Shafer theory is concerned with the set of all subsets of Θ, known as the Frame of Discernment
2Θ = {f, {θ1}, …, {θn}, {θ1, θ2}, …, {θ1, θ2, ... θn}}
Universe of mutually exclusive hypothesis
19

FRAMES OF DISCERNMENT
A subset {θ1, θ2, θ3} implicitly
represents the proposition that one of θ1, θ2 or θn is the case
The complete set Θ represents the proposition that one of the exhaustive set of events is true
So Θ is always true
The empty set represents the proposition that none of the exhaustive set of events is true
So always false
20

21
COMBINING THE EVIDENCE
Dempster-Shafer Theory as a theory of evidence has to account for the combination of different sources of evidence
Dempster & Shafer’s Rule of Combination is a essential step in providing such a theory
This rule is an intuitive axiom that can best be seen as a heuristic rule rather than a well-grounded axiom.

22
ADVANTAGES OF DS THEORY
The difficult problem of specifying priors can be avoided
In addition to uncertainty, also ignorance can be expressed
It is straightforward to express pieces of evidence with different levels of abstraction
Dempster’s combination rule can be used to combine pieces of evidence

23
DISADVANTAGES
Potential computational complexity problems
It lacks a well-established decision theory whereas Bayesian decision theory maximizing expected utility is almost universally accepted.
Experimental comparisons between DS theory and probability theory seldom done and rather difficult to do; no clear advantage of DS theory shown.

24
BASIC PROBABILITY ASSIGNMENT
The basic probability assignment (BPA), represented as m, assigns a belief number [0,1] to every member of 2Θ such that the numbers sum to 1
m(A) represents the maesure of the belief that is committed exactly to A (to individual element A and to no smaller subset)
A
Am
m
1)()2(
0)()1(

25
BASIC PROBABILITY ASSIGNMENTEXAMPLE
suppose Diagnostic problem
No information
60 of 100 are blue
30 of 100 are blue and rest of them are black or yellow
1)( m
4.0)(
6.0})({
m
Bluem
0)(
7.0}),({
3.0})({
m
YellowBlackm
Bluem
},,,{ OtherYellowBlackBlue
25

26
BELIEF FUNCTIONS
Obtaining the measure of the total belief committed to A:
Belief functions can be characterized without reference to basic probability assignments:
AB
BmABel )()(
InI Ii
iI
n BelBel
Bel
Bel
,...,1
11 )(1)...(.3
1)(.2
0)(.1

27
BELIEF FUNCTIONS
For Θ = {A,B}
BPA is unique and can recovered from the belief function
BABelBBelABelBABel )()()(
BBelAmAB
BA
)1()(

28
BELIEF FUNCTIONS
Focal element A subset is a focal element if m(A)>0
Core The union of all the focal elements.
Theorem
BCoreBBelB 1)(,

29
BELIEF FUNCTIONSBELIEF INTERVALS
Ignorance in DS Theory:
The width of the belief interval:
The sum of the belief committed to elements that intersect A, but are not subsets of A
The width of the interval therefore represents the amount of uncertainty in A, given the evidence
1 A)Bel(Bel(A)
A)]- Bel([Bel(A), 1

30
One’s belief about a proposition A are not fully described by one’s degree of belief Bel(A) Bel(A) does not reveal to what extend one doubts A
Degree of Doubt:
Upper probability:
The total probability mass that can move into A.
BELIEF FUNCTIONSDEGREES OF DOUBT AND UPPER PROBABILITIES
)()( cABelADou
)(1)(* ADouAP
ABABB
c BmBmBmABelAPc
)()()()(1)(*
30

31
BELIEF FUNCTIONSDEGREES OF DOUBT AND UPPER PROBABILITIESEXAMPLE
Subset m Bel Dou P*
{} 0 0 1 0
{1} 0.1 0.1 0.5 0.5
{2} 0.2 0.2 0.4 0.6
{3} 0.1 0.1 0.4 0.6
{1, 2} 0.1 0.4 0.1 0.9
{1, 3} 0.2 0.4 0.2 0.8
{2, 3} 0.2 0.5 0.1 0.9
{1, 2, 3} 0.1 1 0 1
m({1, 2}) = – Bel({1}) – Bel({2}) + Bel({1, 2}) = – 0.1 – 0.2 + 0.4

32
BELIEF FUNCTIONS BAYESIAN BELIEF FUNCTIONS
A belief function Bel is called Bayesian if Bel is a probability function.
The following conditions are equivalent
Bel is Bayesian
All the focal elements of Bel are singletons
For every A⊆Θ,
The inner measure can be characterized by the condition that the focal elements are pairwise disjoint.
1 A)Bel(Bel(A)

33
BELIEF FUNCTIONS BAYESIAN BELIEF FUNCTIONSEXAMPLE Suppose },,{ cba
Subset BPA Belief
Φ 0 0
{a} m1 m1
{b} m2 m2
{c} m3 m3
{a, b} 0 m1 + m2
{a, c} 0 m1 + m3
{b, c} 0 m2 + m3
{a, b, c} 0 m1 + m2 + m3 = 1

34
DEMPSTER RULE OF COMBINATION
Belief functions adapted to the representation of evidence because they admit a genuine rule of combination.
Several belief functions
Based on distinct bodies of evidence
Computing their “Orthogonal sum” using Dempster’s rule

35
DEMPSTER RULE OF COMBINATIONCOMBINING TWO BELIEF FUNCTIONS
m1: basic probability assignment for Bel1 A1,A2,…Ak : Bel1’s focal elements
m2: basic probability assignment for Bel2 B1,B2,…Bl : Bel2’s focal elements

36
DEMPSTER RULE OF COMBINATIONCOMBINING TWO BELIEF FUNCTIONS
Probability mass measure of m1(Ai)m2(Bj) committed to
ji BA

37
DEMPSTER RULE OF COMBINATIONCOMBINING TWO BELIEF FUNCTIONS
The intersection of two strips m1(Ai) and
m2(BJ) has measure m1(Ai)m2(BJ) , since it is
committed to both Ai and to BJ , we say that the
joint effect of Bel1 and Bel2 is to commit exactly
to
The total probability mass exactly committed to A:
ji BA
)()(,
21 ABA
jiji
ji
BmAm

38
DEMPSTER RULE OF COMBINATIONCOMBINING TWO BELIEF FUNCTIONSEXAMPLE
m1({1}) = 0.3 m1({2}) = 0.3 m1({1, 2}) = 0.4
m2({1}) = 0.2 {1}, 0.06 Φ, 0.06 {1}, 0.08
m2({2}) = 0.3 Φ, 0.09 {2}, 0.09 {2}, 0.12
m2({1, 2}) = 0.5
{1}, 0.15 {2}, 0.15 {1,2}, 0.2
Subset Φ {1} {2} {1, 2}
mc 0.15 0.29 0.36 0.2
39
DEMPSTER RULE OF COMBINATION COMBINING TWO BELIEF FUNCTIONS
The only Difficulty some of the squares may be committed to empty set
If Ai and Bj are focal elements of Bel1 and Bel2 and if then
The only Remedy: Discard all the rectangles committed to empty set Inflate the remaining rectangles by multiplying them
with
ji BA
021
)(B)m(Am
φBAi,j
ji
ji
1
,21 )0)()(1(
ji BA
jiji BmAm

40
DEMPSTER RULE OF COMBINATION THE WEIGHT OF CONFLICT
The renormalizing factor measures the extent of conflict between two belief functions.
Every instance in which a rectangle is committed to corresponds to an instance which Bel1 and Bel2 commit probability to disjoint subsets Ai and Bj
k)()k
((K)
kK
)(B)m(Amk
φBAi,j
ji
ji
1log1
1loglog
1
1
21

41
DEMPSTER RULE OF COMBINATION THE WEIGHT OF CONFLICT (CONT.)
Bel1 , Bel2 not conflict at all:
k = 0, Con(Bel1, Bel2)= 0
Bel1 , Bel2 flatly contradict each other:
does not exist
k = 1, Con(Bel1, Bel2) = ∞
In previous example k = 0.15
21 BelBel

42
DEMPSTER’S RULE OF COMBINATION
Suppose m1 and m2 are basic probability functions over Θ. Then m1⊕m2 is given by
In previous example
Subset Φ {1} {2} {1, 2}
m=m1⊕m
20 0.3412 0.4235 0.2353

43
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORY
Frame of Discernment: A set of mutually exclusive alternatives:
All subsets of FoD form:
WALKSTANDSIT ,,
WALKSTANDSIT
WALKSTANDWALKSIT
STANDSITWALKSTANDSIT
,,
,,,,
,,,,,{},
2

44
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORY
Exercise deploys two “evidences in features” m1 and m2
m1 is based on MEAN features from Sensor1
m1 provides evidences for {SIT} and {¬SIT}
({¬SIT} = {STAND, WALK})
m2 is based on VARIANCE features from Sensor1
m2 provides evidences for {WALK} and {¬WALK }
({¬WALK } = {SIT, STAND})

45
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORY
AB
* BmABel(A)PPls(A)Pl(A) 11

46
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORYCALCULATION OF EVIDENCE M1
z1=mean(S1)
Evidence
Concrete value z1(t)
Bel(SIT) = 0.2Pls(SIT) = 1 - Bel(¬SIT) = 0.5
m1Concrete Value(SIT, ¬SIT, ) = (0.2, 0.5, 0.3)

47
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORYCALCULATION OF EVIDENCE M2
z2=variances(S1)Concretevalue z2(t)
Bel(WALK) = 0.4Pls(WALK) = 1-Bel(¬WALK) = 0.5
Evidence
m2Concrete Value(WALK, ¬WALK, ) = (0.4, 0.5, 0.1)

48
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORYDS THEORY COMBINATION Applying Dempster´s Combination Rule:
Due to m({}) Normalization with 0.92 (=1-0.08)
21 mmm
m1(SIT) = 0.2m1(¬SIT) =
m1(STAND,WALK) = 0.5m1(ALL) = 0.3
m2(WALK) = 0.4 m({}) = 0.08 m(WALK) = 0.2 m(WALK) = 0.12
m2(¬WALK) = m2(STAND,SIT) = 0.5 m(SIT) = 0.1 m(STAND) = 0.25 m(STAND,SIT) =
0.15
m2(ALL) = 0.1 m(SIT) = 0.02 m(STAND,WALK)=0.05 m(ALL) = 0.03

49
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORYNORMALIZED VALUES
Belief(STAND) = 0.272
Plausibility(STAND) = 1 - (0.108+0.022+0.217+0.13) = 0.523
m1(SIT)= 0.2m1(¬SIT) =
m1(STAND,WALK) =0.5m1(ALL) = 0.3
m2(WALK)= 0.4 0 m(WALK)=0.217 m(WALK)=0.13
m2(¬WALK) = m2(STAND,SIT) =0.5 m(SIT)=0.108 m(STAND)=0.272 m(STAND,SIT)=
0.163
m2(ALL) = 0.1 m(SIT)=0.022 m(STAND,WALK)=0.054 m(ALL)=0.033

50
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORY BELIEF AND PLAUSIBILITY (SIT)
Ground Truth: 1: Sitting; 2: Standing; 3: Walking

51
DEMPSTER RULE OF COMBINATION AN APPLICATION OF DS THEORY DS CLASSIFICATION

52
DEMPSTER RULE OF COMBINATION PROBLEMS IN COMBINING EVIDENCE
Unfortunately, the above approach doesn't work It satisfies the second assumption about mass
assignments, that the masses add to 1
But it usually conflicts with the first assumption, that the mass of the empty set is zero
Why?
Because some subsets X and Y don't intersect, so their intersection is the empty set
So when we apply the formula, we end up with non-zero mass assigned to the empty set
We can’t arbitrarily assign m1⊕m2() = 0 because the sum of m1⊕m2 will no longer be 1

53
ZADEH’S OBJECTION TO DS THEORY
Suppose two doctors A and B have the following beliefs about a patient's illness:
mA(meningitis) = 0.99 mA(concussion) = 0.00 mA(brain tumor) = 0.01
mB(meningitis) = 0.00 mB(concussion) = 0.99 mB(brain tumor) = 0.01
then k = mA(meningitis) * mB(concussion) + mA(meningitis) * mB(brain tumor) + mA(brain tumor) * mB(concussion) = 0.9999
so mA ⊕ mB (brain tumor) = (.01 * .01) / (1 - .9999)
= 1

54
GENERALIZED DS THEORY
Body of evidenceConsider Ω = {w1, w2, ..., wn}
{A1, A2, …, An}{m1, m2, …, mn}, Φ≠Ai Ω
Fuzzy Body of evidence
Yen’s generalization

55
EXAMPLE
Consider body of evidence in DS theory over Ω = {1, 2, …, 10} with focal elements:
We want to compute Bel(B) and Pls(B) where

56
EXAMPLE
Acgcording Yen’s generalization A and C whit A and C’s α-cuts then distribute their BPA among α-cuts
Coputing belief and plusibility

57
AN APPLICATION OF DECISION MAKING METHOD BASED ON FUZZIFICATED DS THEORY A CASE STUDY IN MEDICINE Consider these rules:
If “A change in breast skin” Then status is “malignant” If “No change in breast skin” Then status is “unknown”
If “Adenoma dwindles” Then status is “benign” If “Adenoma does not dwindle” Then status is
“unknown”
Suppose we have the following probabilistic P(“A change in breast skin” ) = 0.7 P(“No change in breast skin” ) = 0.3 P(“Adenoma dwindles” ) = 0.4 P(“Adenoma does not dwindle” ) = 0.6

58
AN APPLICATION OF DECISION MAKING METHOD BASED ON FUZZIFICATED DS THEORY body of evidence
{malignant , [total range]}m1 (malignant) = 0.7 , m1 ([total range]) = 0.3
{benign , [total range]} m2 (benign) = 0.4 , m2 ([total range]) = 0.6
combining body of evidencem12 (benign) = 0.1476
m12 (malignant) = 0.5164
m12 (benign malignant) = 0.1147
m12 ([total range]) = 0.2213

59
AN APPLICATION OF DECISION MAKING METHOD BASED ON FUZZIFICATED DS THEORY Definition
Fuzzy Valued Bel and Pls Functions

60
AN APPLICATION OF DECISION MAKING METHOD BASED ON FUZZIFICATED DS THEORY
Pr(benign) Pr(malignant)
61
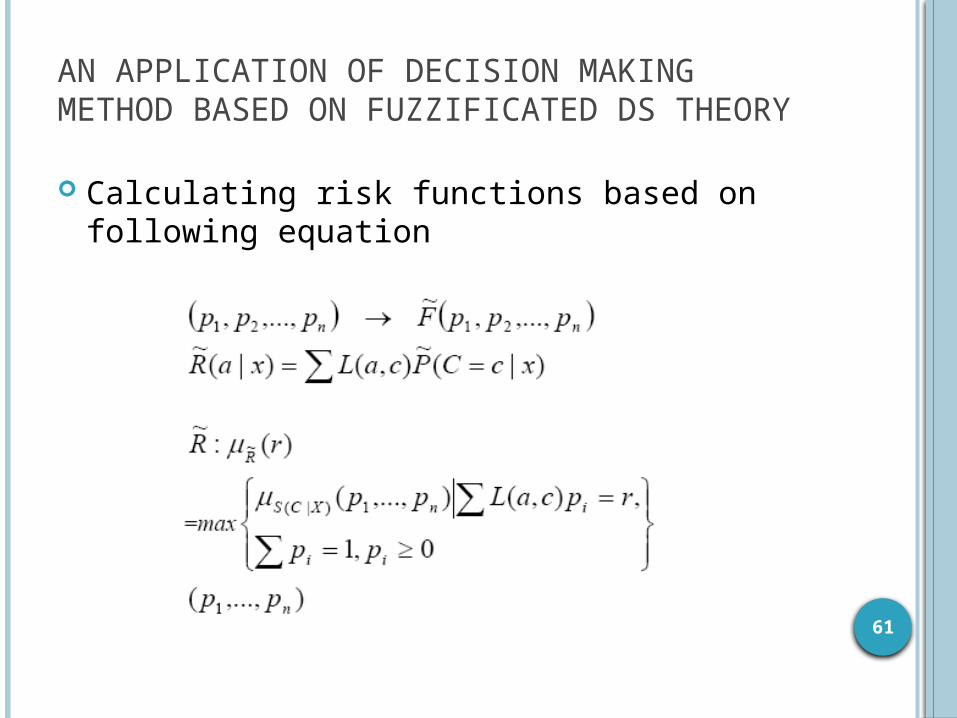
AN APPLICATION OF DECISION MAKING METHOD BASED ON FUZZIFICATED DS THEORY
Calculating risk functions based on following equation

62
AN APPLICATION OF DECISION MAKING METHOD BASED ON FUZZIFICATED DS THEORY a. Fuzzy set of risk function values for benign
prediction b.Fuzzy set of risk function values for
malignant prediction

63
AN APPLICATION OF DECISION MAKING METHOD BASED ON FUZZIFICATED DS THEORY The final step
rejecting uncertainties (fuzzyness and ignorance) to obtain a scalar value
These answers are calculated by

64
THANKS