introduction to vision robotics - university of the aegean · introduction to vision & robotics...
TRANSCRIPT
IVR Lecture1 2007
1
Introduction to Vision & Roboticsby Bob Fisher [email protected]
Introduction to Robotics
Introduction
Some definitions
Applications of robotics and vision
The challenge: a demonstration
Historical highlights

IVR Lecture1 2007
2
Vision and Robotics: some definitions
Connecting the computer to the “raw unwashed world” (Russell & Norvig)“ t [f 2 d i ] t t ti f th“create [from 2‐d image] an accurate representation of the three‐dimensional world and its properties, then using this information we can perform any visual task” (Aloimonos& Rosenfeld)Vision is the direct extraction of affordances from the optic array ‐ GibsonA robot is:“A programmable multi‐function manipulator designed to move material, parts, or specialised devices g p pthrough variable programmed motions for the performance of a variety of tasks” (Robot Institute of America)“Robotics is the intelligent connection of perception to action’’ (Brady)
Applications: dull, dirty or dangerousVisual inspection of parts
Detecting crime on CCTV
Welding on carsN.B. Overlap with automation
IVR Lecture1 2007
3
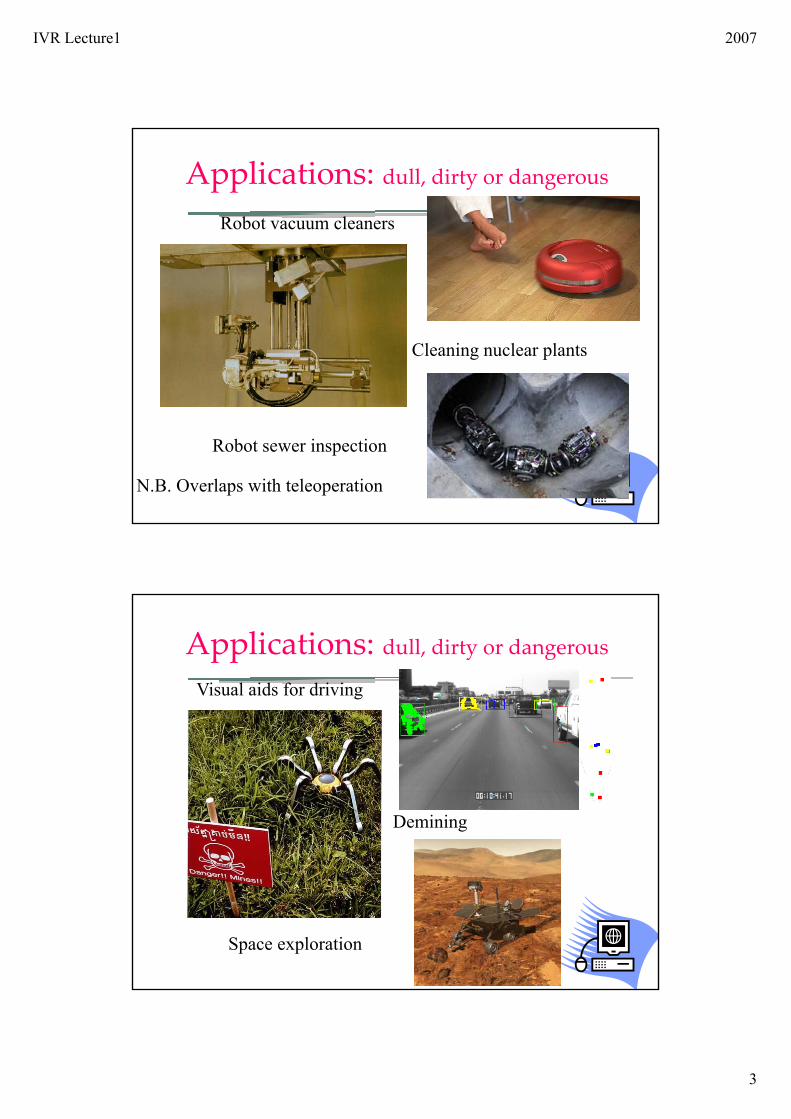
Applications: dull, dirty or dangerousRobot vacuum cleaners
Cleaning nuclear plants
Robot sewer inspection
N.B. Overlaps with teleoperation
Applications: dull, dirty or dangerousVisual aids for driving
Demining
Space exploration
IVR Lecture1 2007
4
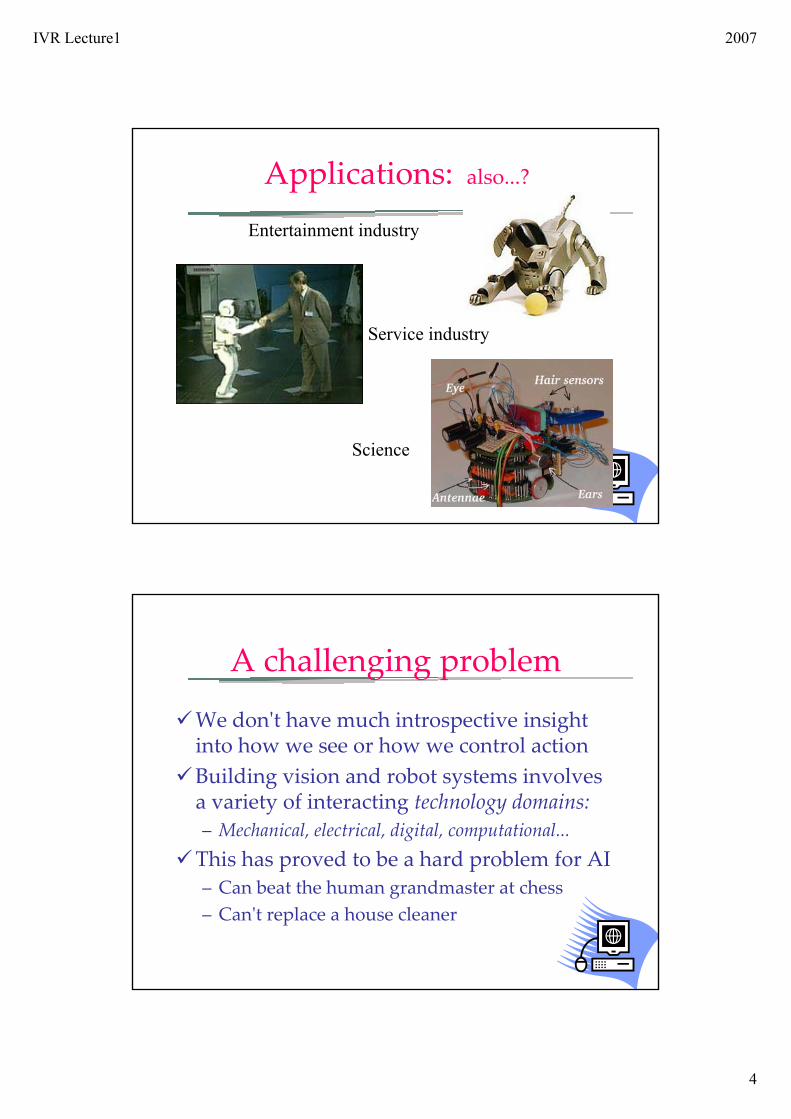
Applications: also...?Entertainment industry
Service industry
Science
A challenging problem
We donʹt have much introspective insightWe don t have much introspective insight into how we see or how we control actionBuilding vision and robot systems involves a variety of interacting technology domains:– Mechanical, electrical, digital, computational...This has proved to be a hard problem for AIThis has proved to be a hard problem for AI– Can beat the human grandmaster at chess– Canʹt replace a house cleaner

IVR Lecture1 2007
5
Vision and robotics uses all areas of AI:
Problem solving, planning, search, inference, knowledge representation, learning etc...g p , gBut we canʹt just plug sensors and effectors onto an AI simulation and expect it to work Have constraints such as:– Limited, noisy, raw information– Continuous dynamic problem space– Time, power, cost and hardware limitationsOften solutions grounded in these constraints do not resemble conventional AI approaches
Ancient Greek hydraulic and mechanical automata
H fHero of Alexandria
AD 100

IVR Lecture1 2007
6
Renaissance optics:
The algorithmic connection between the world and the image - Durer c.1500
18th century clockwork animals
Vaucanson’s duck
IVR Lecture1 2007
7
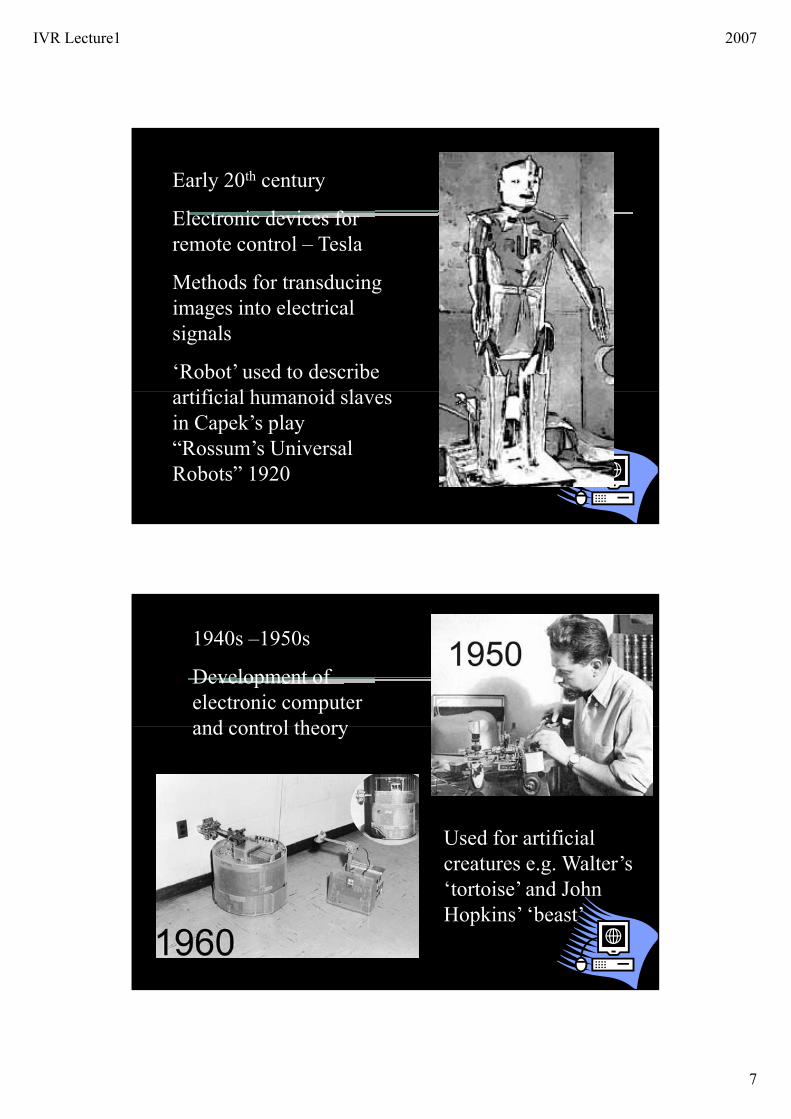
Early 20th century
Electronic devices for remote control – Tesla
Methods for transducing images into electrical signals
‘Robot’ used to describe tifi i l h id lartificial humanoid slaves
in Capek’s play “Rossum’s Universal Robots” 1920
1940s –1950s
Development of electronic computer and control theoryand control theory
Used for artificial t W lt ’creatures e.g. Walter’s
‘tortoise’ and John Hopkins’ ‘beast’

IVR Lecture1 2007
8
1960s
Industrial robot arms:arms:
Unimation
Methods for image enhancement and pattern recognitionp g
1970s
Work on systems in restricted domains
e.g. Shakey in blocks world
Freddy assembly task
IVR Lecture1 2007
9
1980s
Tackling more realistic problems:problems:
Natural scene analysis
Face recognition
Dynamic locomotion
Significant impact in manufacturing
Active vision
Recent highlights:
Leg Lab - MIT
1980 onward
1995 – biped acrobatics
IVR Lecture1 2007
10
(Leg lab continued) 2000 – complex biped
Recent highlights:
NavLab
CMU 1987 onwards
1995 ‘No hands across America’ drive from Pittsburgh to SanDiegoSanDiego
98.2% autonomous

IVR Lecture1 2007
11
Military – Predator UAV
Walking Reactive “Insects”
Atilla & Ghengis – MIT Brooks Lab c. 1990

IVR Lecture1 2007
12
Barrett Gripper
Classical Control Paradigm: “SPA”
•• speed and efficiencyspeed and efficiency•• flexibility and adaptivityflexibility and adaptivity•• modularity and scalabilitymodularity and scalability•• errorerror--tolerance and robustnesstolerance and robustness
SPA lacksSPA lacks•• serialserial•• ad hoc ad hoc •• analyticalanalytical•• assumptousassumptous
SPA isSPA is

IVR Lecture1 2007
13
Quotations by R. Brooks”fast, cheap, and out of control”
Planning is just a way of avoiding figuring out what to do next.The world is its own best modelThe world is its own best modelComplex behavior need not necessarily be the product of a complex control systemSimplicity is a virtue Robots should be cheapAll on‐board computation is importantS t h ld b b ild i t llSystems should be build incrementallyIntelligence is in the eye of the observerNo representation, no calibration, no complex computers
Subsumption ArchitectureEvaluation of progressEvaluation of progress
Scheduling of subtasksScheduling of subtasksif notif not
Scheduling of subtasksScheduling of subtasks
(sub(sub--) Goal approach) Goal approach
Path planningPath planning
SelfSelf localization &localization & calibrationcalibrationif notif not
if notif not
if notif not
SelfSelf--localization & localization & --calibrationcalibration
Obstacle avoidanceObstacle avoidance
Move when clearMove when clearif notif not
if notif not
sensesense actact
IVR Lecture1 2007
14
Evaluation of the Subsumption Architecture
“I wouldn’t want one to be my chauffeur”(C. Torpe)
Modifications at low‐levels affect higher levelsOften there the hierarchy is not strictPriorities rather than inhibitionRepresentations, plans, and models do helpReproducibility is a virtuep ySPA is top‐down, SubsArc is bottom‐up“neats vs. scruffies”
Sensing the world
Keypoints:Why robots need sensingFactors that affect sensing capabilityContact sensingProximity and range sensingSensing light
IVR Lecture1 2007
15
Why robots need sensing
• For a robot to act successfully in the real world it needs to be able to perceive the world and itselfit needs to be able to perceive the world, and itself in the world.
• Can consider sensing tasks in two broad classes:– Finding out what is out there: e.g. is there a goal; is this a team-mate; is there danger? = Recognition– Finding out where things are: e.g. where is the ball andFinding out where things are: e.g. where is the ball and how can I get to it; where is the cliff-edge and how can I avoid it? = Location
• But note that this need not be explicit knowledge
Sensing capability depends on a number of factors:
1 What signals are available?g
Light Pressure & Sound Chemicals
IVR Lecture1 2007
16
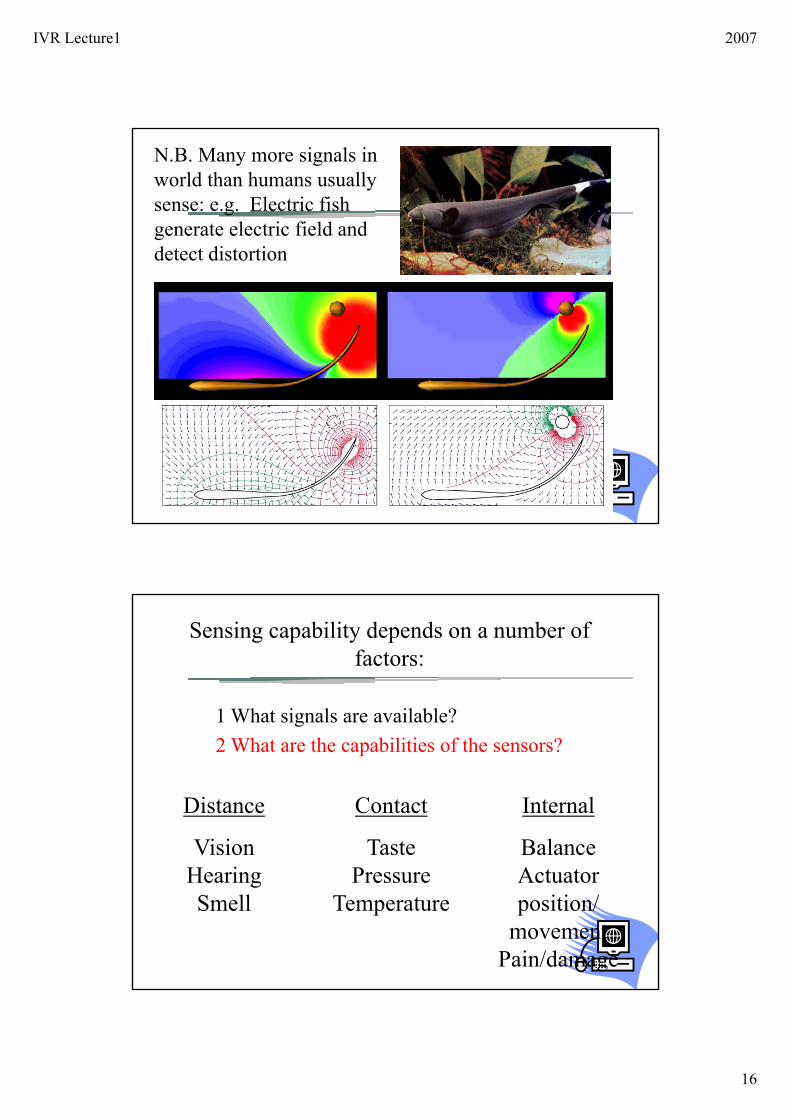
N.B. Many more signals in world than humans usually sense: e.g. Electric fish generate electric field and detect distortiondetect distortion
Sensing capability depends on a number of factors:
1 What signals are available?g2 What are the capabilities of the sensors?
Distance
Vision
Contact
Taste
Internal
BalanceHearingSmell
PressureTemperature
Actuator position/
movementPain/damage

IVR Lecture1 2007
17
Note this differs across animals: e.g. Bees see ultraviolet light
Need to choose what to build in to robot – options and costsp
Visible UltravioletMore like a target?
Sensors perform transductionTransduction: transformation of energy from one form to another (typically, into electrical signals)( yp y, g )
IVR Lecture1 2007
18
Sensors perform transductionSensor characteristics mean there is rarely an isomorphic mapping between the environment and the internal signal, e.g:g , g
- Most transducers have a limited range
- Most transducers have a limited resolution, accuracy, and repeatability
- Most transducers have lags or sampling delays
- Many transducers have a non-linear responseMany transducers have a non linear response
- Biological transducers are often adaptive
- Good sensors are usually expensive in cost, power, size…
Sensing capability depends on a number of factors:
1 What signals are available?2 Wh t th biliti f th ?2 What are the capabilities of the sensors?3 What processing is taking place?
E.g. extracting useful information from a sound signal is difficult:

IVR Lecture1 2007
19
•Sound sources cause air ib ivibration
•Diaphragm (ear drum or microphone) has complex pattern of vibration in response to sound
• Usually analysed by separating frequencies and grouping through harmonic/temporal cues
time
freq
uenc
y
Sensing capability depends on a number of factors:
1 What signals are available?g2 What are the capabilities of our sensors?3 What processing is taking place?4 What is the task?

IVR Lecture1 2007
20
Trans-duction
Internal modelProcessing Actuators
‘Classical’ view
Motor commands
Plan of Action
Decision on Action
Task
Alternative viewTask specific t d ti
Task specific i
Task specific titransduction processing action
Task 2 specific transduction
Task 2 specific processing
Task 2 specific action
Task 3 specific transduction
Task 3 specific processing
Task 3 specific action
Contact sensors
Principal function i l tiis location– E.g. bump switch or pressure sensor: is the object contacting this part of the robot?
IVR Lecture1 2007
21
Contact sensors
Principal function i l tiis location– E.g. bump switch or pressure sensor: is the object contacting this part of the robot?
– Antennae: extend the range with flexible element
Contact sensors
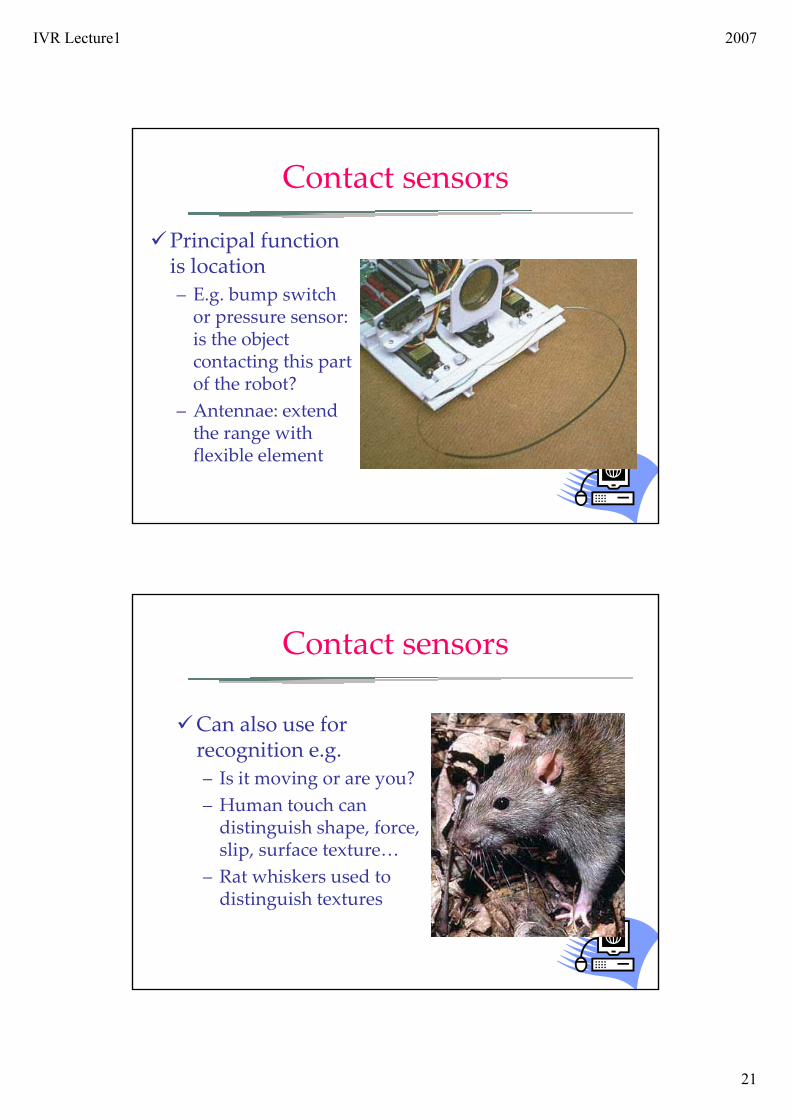
Can also use forCan also use for recognition e.g. – Is it moving or are you?– Human touch can distinguish shape, force, slip, surface texture…p,
– Rat whiskers used to distinguish textures
IVR Lecture1 2007
22
‘Contact’ sensors
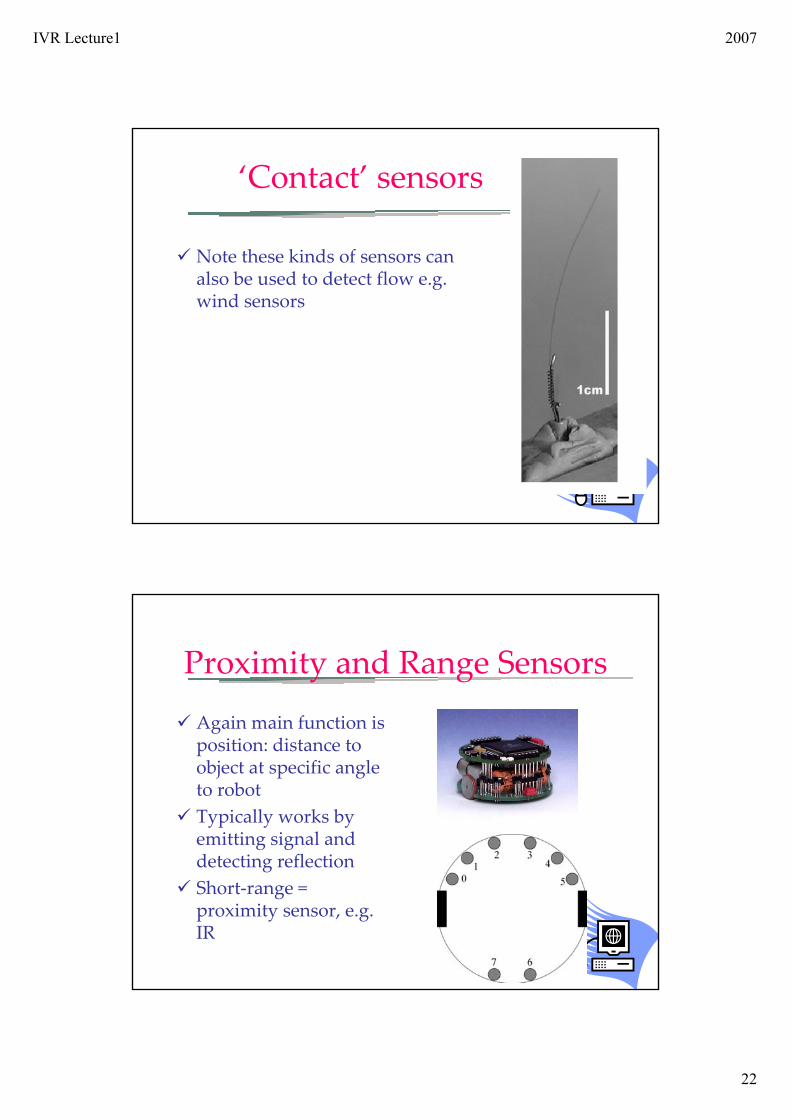
Note these kinds of sensors canNote these kinds of sensors can also be used to detect flow e.g. wind sensors
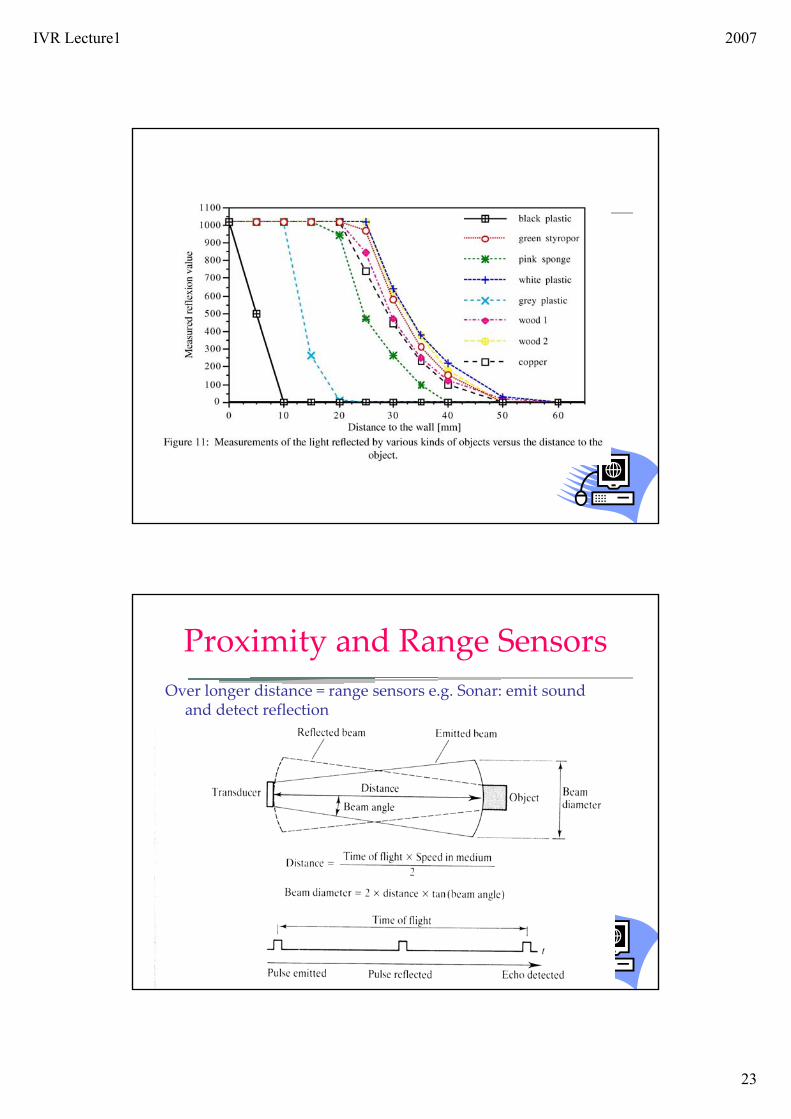
Proximity and Range Sensors
Again main function isAgain main function is position: distance to object at specific angle to robotTypically works by emitting signal and dete ti efle tiodetecting reflectionShort‐range = proximity sensor, e.g. IR
IVR Lecture1 2007
23
Proximity and Range SensorsOver longer distance = range sensors e.g. Sonar: emit sound
and detect reflection
IVR Lecture1 2007
24
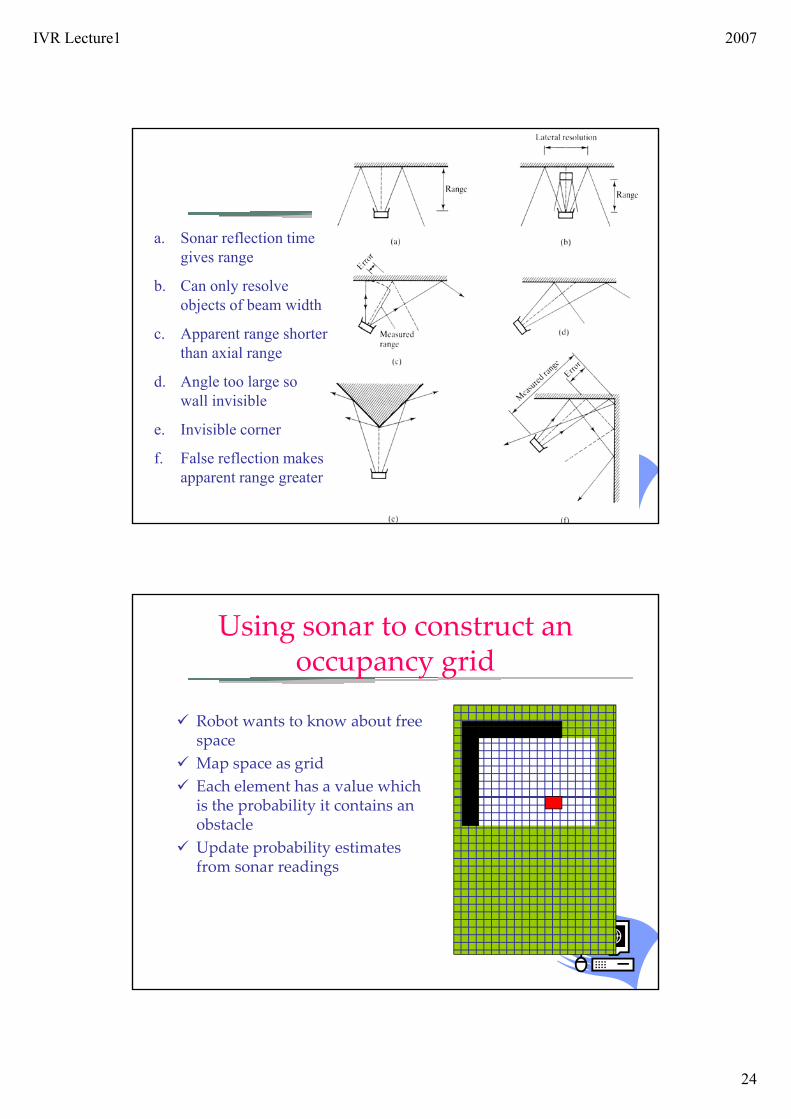
a. Sonar reflection time gives rangegives range
b. Can only resolve objects of beam width
c. Apparent range shorter than axial range
d. Angle too large so wall invisible
e. Invisible corner
f. False reflection makes apparent range greater
Using sonar to construct an occupancy grid
Robot wants to know about free Robot wants to know about freespaceMap space as gridEach element has a value which is the probability it contains an obstacleUpdate probability estimates from sonar readings
IVR Lecture1 2007
25
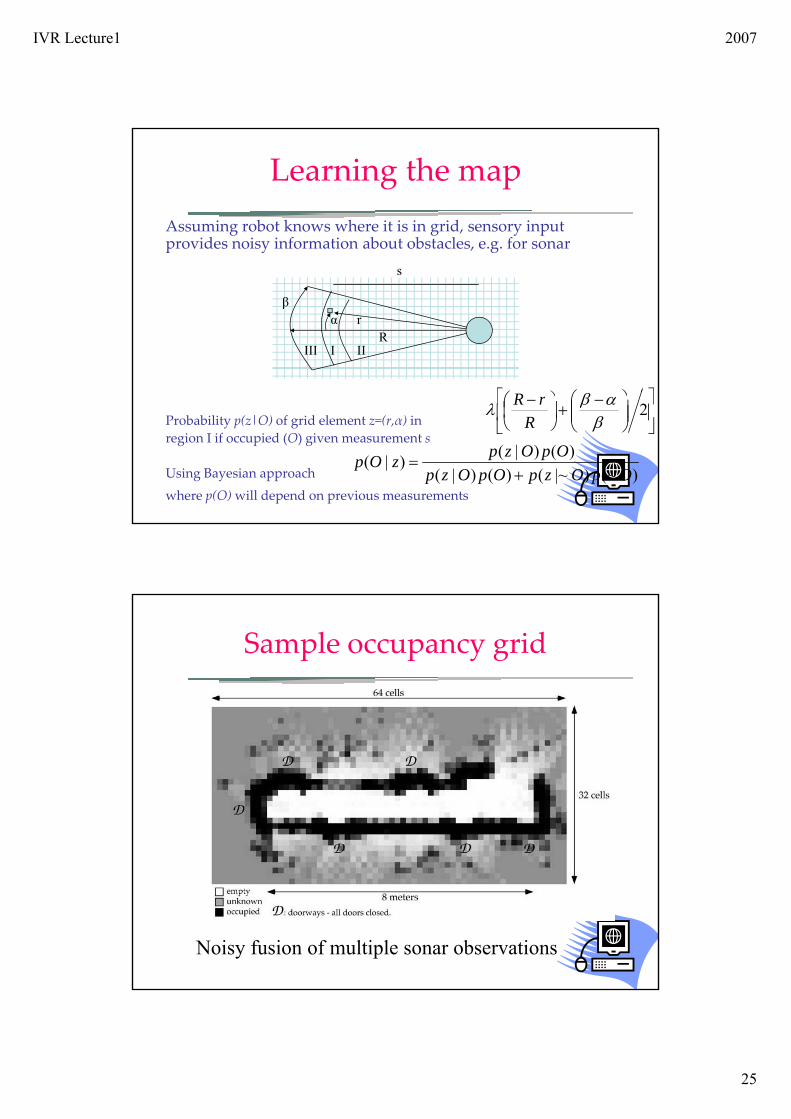
Learning the mapAssuming robot knows where it is in grid, sensory input provides noisy information about obstacles, e.g. for sonar
⎤⎡ ⎞⎛⎞⎛
R
βα r
IIIIII
s
Probability p(z|O) of grid element z=(r,α) in region I if occupied (O) given measurement s
Using Bayesian approachwhere p(O)will depend on previous measurements
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ −+⎟
⎠⎞
⎜⎝⎛ − 2
βαβλ
RrR
)(~)|~()()|()()|()|(
OpOzpOpOzpOpOzpzOp
+=
Sample occupancy grid
Noisy fusion of multiple sonar observations

IVR Lecture1 2007
26
Proximity and Range Sensors
More accurate information (same principle) from laser range finderrange finder
•Either planar or scanning
•1,000,000 pixels per second
•Range of 30 metres
•Accuracy of few mms
Sample Laser Scan
IVR Lecture1 2007
27
Light sensorsWhy is it so useful to detect light?
Straight lines mean the rays reflected from objects can beStraight lines mean the rays reflected from objects can be used to form an image, giving you ‘where’.Very short wavelengths gives detailed structural information (including reflectance properties of surface, seen as colour) to determine ‘what’.Very fast, it is especially useful over large distances.But requires half our brain to do vision…q
Conclusions
Robots need sensing: location objectsRobots need sensing: location, objects, obstaclesCommonly used sensors: laser range, sonar, contact, proprioceptic, GPS (outdoors), markersGeneral scene scanning vs affordancesGeneral scene scanning vs affordances