lecture 4: non-linear filters & image compression
TRANSCRIPT

Lecture 4: Non-linear filters & Image Compression
B14 Image Analysis Michaelmas 2014 A. Zisserman
• Image Compression• Non-lossy vs lossy, JPEG
• Non-linear filters• Median filter, bilateral filter, non-local means
• Inpainting

Image Compression

Why compress?
• Storage• BandwidthThe key attribute which enables compression is redundancy
Compression/decompression pipe line
encoder decoderimage compressed
imageuncompressed
image
ExamplePAL colour video 768 x 576 pixels at 25 frames per second = 33 Mbytes per second
A 2hour video = 238 Gbytes (cf CD holds 0.7 Gbytes, a DVD holds 7 Gbytes)

Two types of compression
1. Loss-less compression (error free), e.g. gzip, zip• typical compression ratios in range 2:1 to 3:1
2. Lossy compression• typical compression ratios in range 10:1 to 50:1
• no perceivable visible difference
Example JPEG compression ratio 16:1

Loss-less Compression
Method 1: Run length encoding
Example – white bar length 40
256 x 256 Image = 65536 bytes
Run length encode as
{ (32748,0), (40,255),(32748,0)} = 15 bytes
Compression ratio = 4369
(integer requires 4 bytes, intensity 1 byte)
Extensions: code ramps; code regions

frequency
intensity
Intensity histogram
use short code
use long code
• instead of using same length code (1 byte) for every intensity, use variable length coding
• e.g. 2 bits for most common intensity, longer codes for less common intensities
• Use Huffman coding
Method 2: Coding redundancy

Joint Photographic Experts Group (JPEG)
• Standard for compression of general images• Allows progressive display of images• Uses both lossy and lossless compression techniques• Uses Discrete Cosine Transform (DCT)
Divide image into 8 x 8 pixel blocks
Compute DCT
Quantize DCT coefficients (lossy step)
encoding
Reconstruct each block from its
DCT coefficients
Recompose image from 8 x 8 blocks
decoding
JPEG Pipeline
Huffman code coefficients
Decode coefficients

Discrete Cosine Transform (DCT) (cf Fourier series)
The forward cosine transform is defined as
21 cos
21 cos
,01
01 4, 2
yvN
xuN
yxfyN
xN
NvcucvuF
where
1,...,2,11
,02
1
Nw
wwC for
for
The inverse DCT is defined as
21
21,
01
01
,
yvN
xuN
vuFvCuCvN
uN
yx
coscos
f

8 x 8 basis images for each block
divided into 8 x 8 blocks

JPEG Quantization Step
Example normalization matrix
Z(u,v)out(u,v) = round(F(u,v)/Z(u,v))
• Z(u,v) chosen to weight coefficients which are visually salient
• scale Z(u,v) to alter compression quality
DCT coefficients normalization normalized & denormalized & F(u,v) quantized quantized
out(u,v)

JPEG performance
original CR: 12:1 16:1 21:1Bytes: 65536 5675 4016 3158
CR: 25:1 33:1 41:1 48:1Bytes: 2643 2007 1613 1373
Note “blocking artifacts”

CR: 12:1 21:1 33:1 48:1mean abs diff 1.3 2.2 4.1 9.4
pixels for which absolute intensity difference > 5
Differences wrt original image
JPEG

Non-linear filters

Non-linear filters
• Non-linear filters are more powerful than linear filters, e.g.
• Suppression of non-Gaussian noise, e.g. spikes
• Edge preserving properties
• Examples include median filters, and morphological filters

Median filter
Definition1. rank-order neighbourhood intensities2. select middle value
In 1DThe median of 2N+1 samples is the value which has N smaller
or equal values, and N larger or equal to it.Example
{ 5, 7, 3, 4, 5, 19, 6, 4, 9 } { 3, 4, 4, 5, 5, 6, 7, 9, 19 }Median of set = 5
Note, “odd man out” effect: { 1, 1, 1, 7, 1, 1, 1 }
sort
{ ?, 1, 1, 1, 1, 1, ? }
median width 3

filters have width 5
Median filter • no new grey values are created• edge is preserved• spike is removed

• A median filter operates over a window by selecting the median intensity in the window
Median filter in 2D
Source: K. Grauman

Median properties
Suppose f{i} and g{i} are two sets of 2N+1 values, then1. med( k f{i} ) = k med( f{i} )2. med( k + f{i} ) = k + med( f{i} )
The median is not linear because• med( f{i} + g{i} ) = med( f{i} ) + med( g{i} )
e.g.• med( {1,2,3} + {5,4,6}) = med( {6,6,9} ) = 6• med( {1,2,3} ) + med( {5,4,6} ) = 2 + 5

2D median filter, 3 x 3 neighbourhood
• sharpens edges, reduces noise, but …• generates jagged edges
Gaussian noise

MedianGaussian
Gaussian: upper lip smoother, eye better preserved
Comparison with Gaussian filter
Gaussian noise

10 times 3 X 3 median
• patchy effect• important details lost (e.g. ear-ring)

Salt and Pepper noise
Gaussian = 1 pixel
3 x 3 median

Median filter
Salt and pepper noise
Median filtered
Source: M. Hebert
Plots of a row of the image
Matlab: output im = medfilt2(im, [h w]);

Application: Film Restoration
• Objective: remove vertical scratches and blotches

Bilateral filtering

Gaussian filter = 2
Gaussian filter = 4
Spatial averaging removes noise and blurs edges
6
6
f(x) + n(x)
Can we remove noise but not blur edges?

pq
filtering f(x,y) with a Gaussian filter h(x,y)
for a pixel at p, rewrite this as a weighted average
In(p) =Xq∈S
Gσ(||p− q||)I(q)
over the support of the filter S, where
Gσ(x) = e− x2
2σ2

Inormalization
factor
new
Bilateral filter
Same idea: weighted average of neighbouring pixels but withan additional weighting term
In(p) =1
W
Xq∈S
Gσs(||p−q||)Gσr(|I(p)−I(q)|)I(q)
spatial weight
range weight

1D illustration
pixelintensity
pixel position
In(p) =1
W
Xq∈S
Gσs(||p−q||)Gσr(|I(p)−I(q)|)I(q)

1D illustration
pixelintensity
pixel position
p
Only pixels close in space and in range are considered
In(p) =1
W
Xq∈S
Gσs(||p−q||)Gσr(|I(p)−I(q)|)I(q)
range
spatial

Gaussian blur vs bilateral Filter
Gaussian blur
Bilateral filter
range
p
p
q
q
spatial
spatial

qqpp
output input
pp
reproduced from [Durand 02]
In(p) =1
W
Xq∈S
Gσs(||p−q||)Gσr(|I(p)−I(q)|)I(q)

s = 2
s = 6
s = 18
r = 0.1 r = 0.25r =
(Gaussian blur)
input
Exploring the Parameter Space

Basic denoising
Noisy input Bilateral filter 7x7 window

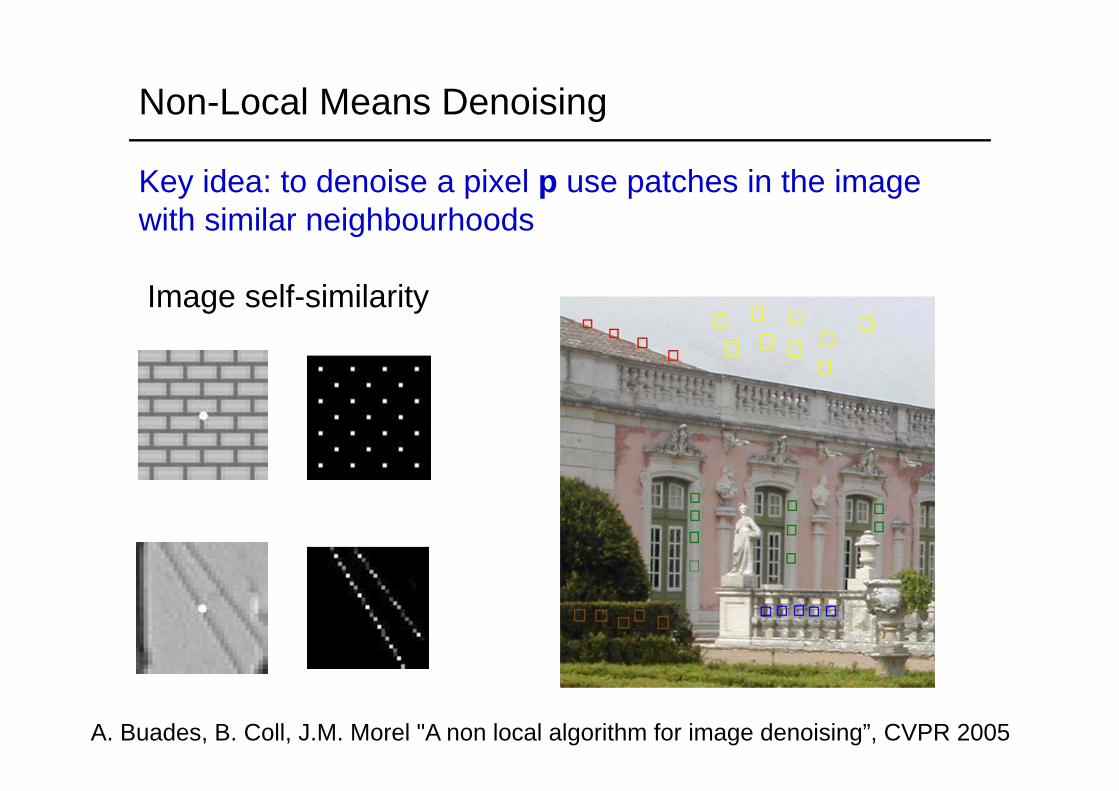
Non-Local Means Denoising
Non-Local Means Denoising
Key idea: to denoise a pixel p use patches in the image with similar neighbourhoods
A. Buades, B. Coll, J.M. Morel "A non local algorithm for image denoising”, CVPR 2005
Image self-similarity

Algorithm:• Select similar (low distance) neighbourhoods to p’s, where the distance
between two neighbourhoods is the Gaussian weighted squared sum of differences
• Compute a Gaussian weighted sum of the centralpixel values as
Non-Local Means Denoising
Assume that if the neighbourhoods are similar, then the central pixel value is also similar (apart from noise)
where Φ is the set of neighbourhoods andW =Pq∈Φ e
−d(Np,Nq)h2
pNp
Nq
d(Np, Nq)
In(p) =1
W
Xq∈Φ
e−d(Np,Nq)
h2 I(q) q

d(Np, Nq) e−d(Np,Nq)
h2
black = low
Parameters:• neighbourhood size: 5 x 5• search region: 7 x 7

Removing film grainoriginal

Removing film graindenoised


Inpainting

Inpainting techniques
• Automated texture generation to fill in regions

Texture Synthesis
Texture sample
Output
Efros & Leung, ICCV 1999

Synthesizing One Pixel
• Select patches with similar neighbourhoods• Choose a central pixel value randomly from this set
pinput image
synthesized image
Slide from Alyosha Efros, ICCV 1999

Neighborhood Window
input
Slide from Alyosha Efros, ICCV 1999

Hole Filling
Slide from Alyosha Efros, ICCV 1999

A Cautionary Note …
Removal of Nikolai Yezhov

Removal of foreground objects using inpainting
original frame

Removal of foreground objects using inpainting
inpainted frame

Removal of foreground objects using inpainting
original frame

Removal of foreground objects using inpainting
inpainted frame

There is much more …
• Image reorganization, e.g. using the patch transform

scale
retarget
• Image retargettinge.g. change of aspect ratio withoutlosing or distorting semantic content