lorentz invariant 3vectors
DESCRIPTION
Lorentz invariant 3vectorsTRANSCRIPT

Lorentz-invariant three-vectors and alternative formulation of relativisticdynamics
Krzysztof Rebilasa�
Zakład Fizyki, Uniwersytet Rolniczy im. Hugona Kołłątaja w Krakowie, Al. Mickiewicza 21,31-120 Kraków, Poland
�Received 29 May 2009; accepted 13 October 2009�
Besides the well-known scalar invariants, there also exist vectorial invariants in special relativity. Itis shown that the three-vector �dp� /dt�� +�v�dp� /dt�� is invariant under the Lorentz transformation.The subscripts � and � denote the respective components with respect to the direction of thevelocity of the body v� , and p� is the relativistic momentum. We show that this vector is equal to aforce F� R, which satisfies the classical Newtonian law F� R=ma�R in the instantaneous inertial restframe of an accelerating body. Therefore, the relation F� R= �dp� /dt�� +�v�dp� /dt��, based on theLorentz-invariant vectors, may be used as an invariant �not merely a covariant� relativistic equationof motion in any inertial system of reference. An alternative approach to classical electrodynamicsbased on the invariant three-vectors is proposed. © 2010 American Association of Physics Teachers.
�DOI: 10.1119/1.3258203�
I. INTRODUCTION
The origins of the principle of relativity are usually attrib-uted to Galileo,1 who used his famous illustration of a mov-ing ship to show that none of the experiments performed onthe ship “below deck” allow us to decide whether the ship isat rest or in steady motion. The same idea was later ex-pressed by Newton2 as the statement that the motion of bod-ies “is the same among themselves” regardless of whetherthe space in which the bodies are placed is at rest or movesuniformly in a straight line. Both Galileo and Newton re-ferred to laws of classical mechanics. Their statements weregeneralized to all the laws of physics by Poincaré3 andEinstein,4 and the contemporary formulation of the principleof relativity states that the laws of physics have the sameform in all inertial reference frames.
For forces independent of velocity and depending only onsome relative distances between bodies, this principle is sat-isfied by Newton’s second law of motion,
F� = ma� , �1�
because acceleration a� and the function F� representing forceare invariant vectors under a Galilean transformation of co-ordinates r��=r�−V� t. Thus, invariance of Newton’s second lawfollows from invariance of the vectors that are containedwithin this law. Acceleration and force have the status ofabsolute quantities in Newtonian mechanics, and thus Eq. �1�remains valid regardless of the inertial frame in which it isused.
In special relativistic dynamics the principle of relativitystates that the laws of physics must be invariant under theLorentz transformation. The three-dimensional relativisticequation of motion is
F� =dp�
dt, �2�
where p� is the relativistic momentum defined as p� =m�vv�with �v= �1−v2 /c2�−1/2. However, contrary to acceleration inclassical mechanics, dp� /dt is not invariant under the Lorentztransformation. The rate of change of momentum dp� /dt in a
frame S is related to the rate of change of momentum294 Am. J. Phys. 78 �3�, March 2010 http://aapt.org/ajp
dp�� /dt� in another frame S� that has a velocity V� in the frameS �see Fig. 1� by5,6
dp�
dt= �dp��
dt��
�
+ �V�dp��
dt��
�
+ �Vv� � � V�
c2 �dp��
dt�� , �3�
where the indices � and � refer to the directions parallel andperpendicular to the velocity V� . �Note that the vector v� on theright side of Eq. �3� is the velocity of a body measured in theframe S.� The postulate of relativity is then fulfilled in an-other way. Namely, the equation of motion is written usingfour-vectors
dp�
d�= K�, �4�
where p�= �m�vc , p��, � is the proper time and is a scalar
invariant of the Lorentz transformation, and K�= �K0 ,K� � is a
four-vector, of which the spatial part K� is related to the forceF� as K� =�vF� . Because p� and K� are four-vectors, the leftand right sides of Eq. �4� transform in the same manner:p�=��
�p�� and K�=���K��, where ��
� are components of atensor representing a Lorentz transformation �a generalizedone, if a rotation of any axes is included� from the frame S�to the frame S. If we substitute these relations into Eq. �4�and remember that ��
� are time independent, we see that Eq.�4� is equivalent to
dp��
d�= K��. �5�
Equation �5� is the relativistic equation of motion in theframe S� and has the same form as the relativistic equation ofmotion �4� written in the frame S. We say that Eq. �4� isLorentz covariant. The principle of relativity is thus fulfilledin the sense that invariance of the relativistic equation ofmotion is understood as its Lorentz covariance.
There is an essential difference between the formulation ofthe principle of relativity in the realm of relativistic mechan-ics and its nonrelativistic meaning. First, the four-dimensional equation of motion �4� is not invariant in the
sense that it is not based on invariant vectors. The four-294© 2010 American Association of Physics Teachers

vectors p� and p�� are not invariant, and likewise neither arethe four-vectors K� and K��. We have no quantity, analogousto acceleration in nonrelativistic mechanics that represent anumerically invariant �universal� result of the action of force.The invariance of the relativistic law of motion is form in-variant, as shown in Eqs. �4� and �5�, but not numericallyinvariant as is the case for the nonrelativistic law of motion�1�.
Another problem concerning the principle of relativity for-mulated by means of covariant four-vectors is that Eq. �4� isredundant. Contrary to the four-vector �t ,x�� in which allcomponents are relevant for a description of a physical situ-ation, in Eq. �4� only its spatial part equivalent to Eq. �2� isphysically meaningful. The zero components of p� and K�
are not independent of their spatial parts because dp0 /dt= �dp� /dt� ·v� /c, which means also that K0=�vF� ·v� /c=K� ·v� /c.In this context, the construction of the four-vectors p� andK� as representing a physical reality may seem artificial.Because the complete physical information about the behav-ior of an accelerating object is included in the spatial part ofdp� /d�, it is strange that what is real in the physical world isrepresented by the superfluous four-vectors rather than by therelevant Euclidean three-vectors dp� /dt and F� .
The advantage of the tensor approach is elegantly ex-presses the requirement of covariance of the law of motion.If we had restricted ourselves only to the three-dimensionalformulation of the law in the form of Eq. �2�, the requirementof covariance would have had to be expressed in a much lessconcise way, requiring that the function F� representing forceshould transform covariantly in the same way as the vectordp� /dt according to Eq. �3�,
F� = �F�� �� + �V�F�� �� + �Vv� � � V�
c2 � F�� � . �6�
The relations �3� and �6� imply that the relation F��
=dp�� /dt� is satisfied in the frame S�, in the same form as thethree-dimensional equation of motion in the frame S.
We can verify directly that the spatial components of Eq.�4� transform in accordance with Eqs. �3� and �6� so that boththe tensor and the three-vector approach are equivalent. Nev-ertheless, the covariance requirement referring to the relevantthree-dimensional physical law �2� expressed by Eqs. �3� and
S
S'
V
�
�
v
Fig. 1. The frame S� moves with a velocity V� with respect to the frame S.The velocity of a body measured in the frame S is v� . Note that the orienta-tion of the axes of the frames S and S� can be chosen arbitrarily because inthe three-dimensional equations the components of the vectors are estab-lished with respect to the velocity V� .
�6� is less transparent than its four-vector version. In con-
295 Am. J. Phys., Vol. 78, No. 3, March 2010
trast, the clarity of the four-vector approach is achieved atthe expense of the artificial construction of the redundantfour-vectors �p�� and �K��.
The aim of this paper is to show that besides the knownscalar invariants �such as the space-time interval or othertensor contractions�, there also exist Lorentz-invariant three-vectors. We use them to develop an alternative approach torelativistic dynamics and a “strong” meaning of the principleof relativity—similar to that in nonrelativistic mechanics—can be preserved.
The cornerstone of our theory is the notion that the three-dimensional vector �dp� /dt�� +�v�dp� /dt�� is invariant underthe Lorentz transformation and that this vector amounts tothe force F� R in the instantaneous inertial rest frame R of amoving body. Similar to the Galilean transformation, whichleaves acceleration unchanged and allows the law of motionF� =ma� to be invariant �for forces independent of the velocityof the body�, the vector �dp� /dt�� +�v�dp� /dt�� serves as aninvariant measure of the action of force �analogous to ma��and permits us to formulate the invariant relativistic equationof motion F� R= �dp� /dt�� +�v�dp� /dt��, which is not onlystructurally but also numerically the same in any inertial sys-tem of reference. Contrary to the invariance in the Galileantransformation, no restrictions need to be imposed on theforce.
II. THREE-DIMENSIONAL LORENTZ-INVARIANTVECTOR
We refer to Eq. �3� and choose the primed frame to be theinstantaneous inertial rest frame R, which can be connectedat any moment with an accelerating body. The velocity of thebody in the frame R is zero and �dp� /dt�R=mdv�R /d�, wherem is the rest mass of the object and dv�R is its velocity changemeasured in the frame R. In some other systems of referenceS the velocity of the body is v� so that the velocity of theframe R measured in S is V� =v� �see Fig. 2�. Equation �3� canthen be rewritten as
mdv�R
d�= �dp�
dt�
�
+ �v�dp�
dt�
�
. �7�
Note that the projections refer to the direction determined bythe velocity v� .
On the right-hand side of Eq. �7� there are only quantitieslike p� and t that characterize the moving object in the frame
S
R
v�
Fig. 2. The situation from the point of view of the frame S.
S. Because the frame S is chosen arbitrarily, it follows that in
295Krzysztof Rebilas

any inertial frame the vector mdv�R /d� can be expressed inthe same form as the vector �dp� /dt�� +�v�dp� /dt��. It meansthat it is a Lorentz-invariant, and in contrast to the transfor-mation �3�, we have for arbitrary frames S and S� the equal-ity
�dp�
dt�
�
+ �v�dp�
dt�
�
= �dp��
dt��
�v�+ �v��dp��
dt��
�v�. �8�
To further verify the correctness of our conclusion �8�, wecalculate the contraction of the four-vector �dp� /d��. Such acontraction is a scalar Lorentz invariant. To obtain its value,we can calculate it in the rest frame R. We find
dp�
d�
dp�
d�= − �m
dv�R
d��2
. �9�
In contrast, we have
�dp�
d�� = ��v
dp�
dt· �� ,�v
dp�
dt� , �10�
where �� =v� /c, and we can write
dp�
d�
dp�
d�= �v
2��2�dp�
dt�
�
2
− �dp�
dt�2� . �11�
Because �dp� /dt�2= �dp� /dt��2+ �dp� /dt��
2 and �2−1=−1 /�v2,
we obtain
dp�
d�
dp�
d�= − ��dp�
dt�
�
2
+ �v2�dp�
dt�
�
2 �12�
or
dp�
d�
dp�
d�= − ��dp�
dt�
�
+ �v�dp�
dt�
�
2
. �13�
Equation �13� is a direct confirmation that the length of�dp� /dt�� +�v�dp� /dt�� is a Lorentz invariant and Eqs. �9� and�13� agree with our main result �7�.
To better elucidate our idea, we refer to an analogy withthe space-time interval between two events ds2=c2dt2−dx�2,which is the well-known scalar Lorentz invariant. If the in-terval is timelike �ds2�0�, we can find a frame in whichdx� =0; that is, the two events occur at the same place, andds /c represents the proper time interval d� between theevents. The value of a proper quantity d� established in a restframe is not affected by the Lorentz transformation, which iswhy it is Lorentz invariant. We can thus say that the invari-ance of ds2 is derived from the invariance of the properquantity it represents. To put it simply, the invariant ds2
=c2dt2−dx�2 represents one and the same proper quantityc2d�2, expressed by means of coordinates �t ,x�� used in achosen reference frame. Similarly, the spacelike interval�ds20�, for which we can find a frame where the twoevents are simultaneous, is Lorentz invariant because it rep-resents an invariant proper length dx�0 of ds2=−dx�02. Inother words, in any frame, ds2=c2dt2−dx�2 is the properquantity −dx�02 expressed by coordinates in the given sys-tem of reference.
For the vector �dp� /dt�� +�v�dp� /dt��, the situation is simi-lar: this vector is Lorentz invariant because in any frame, it isone and the same proper vector mdv�R /d� expressed bymeans of coordinates connected with a chosen inertial sys-
tem of reference. In the form �dp� /dt�� +�v�dp� /dt��, it is a296 Am. J. Phys., Vol. 78, No. 3, March 2010
universal quantity that is structurally and numerically thesame in any reference frame �analogous to ds2=c2dt2−dx�2�.
III. INVARIANT EQUATION OF MOTION
We have shown that the invariant vector �dp� /dt��
+�v�dp� /dt�� is equal to mdv�R /d� measured in the rest frameR of an accelerating body. In the frame R, the relation of theforce and acceleration is valid
F� R = mdv�R
d�, �14�
where the force F� R depends on the force source establishedin the frame R. For example, for a charge q, we have F� R
=qE� R, where E� R is the electric field given by Maxwell’sequations. Once the function F� R is determined in frame R, itis an established proper quantity for a given physical situa-tion. As such, F� R is invariant and can be used in any refer-ence frame. Taking the force F� R to describe motion in anarbitrary frame S means that we use the same numericallyinvariant function F� R, in which only its arguments �space-time coordinates� should be transformed from R to a givensystem of reference S: F� R�� ,x�R��F� R���t ,x�� ,x�R�t ,x����F� R�t ,x��.
We insert the relation �7� into Eq. �14� and obtain
F� R�t,x�� = �dp�
dt�
�
+ �v�dp�
dt�
�
. �15�
This equation is valid for any frame of reference, and thuswe have arrived at the desired invariant relativistic equationof motion based on the invariant three-vectors.
The meaning of the proposed equation of motion in theform of Eq. �15� is simple and intuitive. It is the Newton’slaw �14� in the rest frame R, written in terms of the quantitiesused in the laboratory frame of reference S. The function F� R,originally established in the frame R, has universal and fun-damental significance because by using it, we can formulatethe equation of motion in any system of reference. It is un-derstandable that the relevant features of the force source areto be established relative to the accelerating body, that is, inits instantaneous rest frame R, because only the state of thesource of the force with respect to the accelerating body ismeaningful.
It is easy to check that in the limit v /c→0, the equation ofmotion �15� becomes the nonrelativistic Newton’s secondlaw of motion.
The usual relativistic equation in the form F� =dp� /dt,which is the same as the nonrelativistic equation of motionwith the momentum generalized to its relativistic form, isconceptually less attractive than Eq. �15�. The standard equa-tion of motion is not Lorentz invariant but merely Lorentzcovariant. Instead of dp� /dt, it is more useful to regard theactual Lorentz-invariant quantity �dp� /dt�� +�v�dp� /dt�� asthe effect of the action of a force. Because it is equal to thewell-defined proper force F� R established in the rest frame ofa moving body, we obtain the equation of motion �15� basedon the Lorentz-invariant quantities. Additionally, because in
�
Eq. �15� we use the same function FR in any frame, we avoid296Krzysztof Rebilas

the problem of the relativistic force transformation, leadingto a complex equation such as Eq. �6� or its four-dimensionalcounterpart.
IV. ALTERNATIVE VERSION OF CLASSICALELECTRODYNAMICS
According to the theory of electromagnetism, the equationof motion �that is, its physically meaningful three-dimensional version� in a laboratory system S is
dp�
dt= qE� + qv� � B� , �16�
where E� and B� are the electric field and magnetic inductionin the frame S. If we pass to another frame S�, we obtain,according to Eq. �3�,
dp��
dt�= F� � + �VF� � − �Vv�� � � V
c2 � F�� , �17�
where, from Eq. �16�, F� =qE� +qv� �B� . We substitute this ex-pression for F� into Eq. �17�, express v� by means of v�� and V�and obtain, after some tedious algebra,
dp��
dt�= q�E� � + �VE� � + �VV� � B� � + qv��
� �B� � + �VB� � −�V
c2 V� � E�� . �18�
Subsequently, the electric and magnetic fields are defined inthe frame S� as
E� � = E� � + �VE� � + �VV� � B� , �19�
B� � = B� � + �VB� � −�V
c2 V� � E� . �20�
In this way, Eq. �18� appears to have the same form as Eq.�16�,
dp��
dt�= qE� � + qv�� � B� �. �21�
Although Eq. �21� has the same form as Eq. �16�, the elec-tromagnetic fields in each frame are numerically different.That is, the commonly used relativistic law of motion is Lor-entz covariant, but not Lorentz invariant.
The use of the standard equation of motion �2� and theusual procedure for transforming this equation is conceptu-ally inconvenient �“mixed” electromagnetic fields that aredifferent in different systems of reference�. Instead, we pro-pose to use the Lorentz invariant law of motion �15�. For thecase of electromagnetism, this equation in the laboratoryframe S is
�dp�
dt�
�
+ �v�dp�
dt�
�
= qE� R. �22�
The vector E� R is the well-known electric field measured inthe instantaneous rest frame of the accelerating charge q. Thearguments of E� R �which is originally expressed by means ofthe quantities �� ,x�R� used in R� should be expressed through
the Lorentz transformation by �t ,x��, used in the frame S, so297 Am. J. Phys., Vol. 78, No. 3, March 2010
that we obtain E� R�� ,x�R��E� R���t ,x�� ,x�R�t ,x����E� R�t ,x��. If wepass to the frame S�, the equation of motion in this frame is
�dp��
dt��
�v�+ �v��dp��
dt��
�v�= qE� R, �23�
and it remains to express the former arguments of E� R �t ,x�� in
terms of the primed ones �t� ,x�� � �or directly, the original
variables �� ,x�R� in terms of the primed variables �t� ,x�� ��.Compared to the standard approach, the simplicity ob-
tained, thanks to the really invariant equation of motion, isevident. No transformation of the electromagnetic vectors isrequired. In any frame, we use the same function, E� R, inwhich we must transform only its arguments to a given sys-tem of reference. The mathematical and conceptual transpar-ency of this approach is emphasized by the fact that thevector �dp� /dt�� +�v�dp� /dt�� is understood as the invariant�and in this sense absolute� measure of the action of force.Moreover, Eq. �22� shows that instead of the full set of Max-well’s equations for fields E� and B� in laboratory frames, it isenough to formulate the laws of electromagnetism only forthe field E� R in the frame R. The field E� R alone allows us towrite the equation of motion �22� for any laboratory systemof reference.
On the basis of Eq. �16�, we can express E� R by means ofthe standard electromagnetic fields measured in the frame S,which leads to
�dp�
dt�
�
+ �v�dp�
dt�
�
= q�E� � + �vE� �� + q�vv� � B� . �24�
The right-hand side of Eq. �24� shows the dependence of E� R
on the velocity v� of accelerating charge q �the fields E� and B�are independent of v��. Surprisingly, we have also discovereda new invariant three-vector in electromagnetism. Namely,
E� � + �vE� � + �vv� � B� �25�
is a Lorentz-invariant three-vector. It is invariant because it isthe proper field E� R expressed by the quantities and variablesused in an arbitrary frame S.
Note that if we introduce the new quantities defined as
E� � E� � + �vE� �, �26�
B� � �vB� , �27�
we can rewrite Eq. �24� as
�dp�
dt�
�
+ �v�dp�
dt�
�
= qE� + qv� � B� . �28�
Equation �28� is another form of the invariant equation ofmotion �22�. Equation �28� together with the definitions �26�and �27� differ from the standard equation �16�, containingthe ordinary electromagnetic fields only by the factor �v. Itappears then that the truly invariant equation of motion canbe achieved from the standard covariant one by a slightmodification.
It would be interesting to find laws that govern E� and B�� �
�instead of Maxwell’s equations for the fields E and B� and297Krzysztof Rebilas
then use the Lorentz-invariant law of motion in the form ofEq. �28� to describe the behavior of accelerating chargedparticles.
V. DISCUSSION AND CONCLUSIONS
It is well known that the Galilean transformation in three-dimensional Euclidean space leaves the acceleration vectorunchanged. In turn, the Lorentz transformation in four-dimensional pseudo-Euclidean space-time from all possiblefour-vectors does not change only the null four-vectors �ex-amples are the world line of the light �ct ,x��t��, where x��t�=ct or the wave four-vector � /c ,k�� for the electromagneticwave�. In nonrelativistic physics, acceleration is an absolutequantity that characterizes a moving object. In special rela-tivity, the speed of light is absolute, which is reflected in thenull four-vectors. We have shown that a universal quantitymay be ascribed not only to light propagation but to anyaccelerating object. The three-vector �dp� /dt�� +�v�dp� /dt��
was shown to remain unchanged under the Lorentz transfor-mation. It contains only relevant information about a body’smotion. Thus, we avoid the problem of redundant tensors forrepresenting the observer-independent physical reality andobtain the three-dimensional quantity that corresponds to thephysical process in a natural way. The same applies to theinvariant three-vector F� R representing a proper force and al-lows us to write the truly Lorentz-invariant equation of mo-tion �15� based on invariant three-vectors.
Our method to identify invariant vectors by starting fromacceleration measured in the rest frame of moving objectapplies for any type of coordinates transformations used inspecial relativity, and thus for a transformation based on “ev-eryday” clock synchronization as conceived by Tangherlini,7
later discussed by Mansouri and Sexl,8 and more recently bySelleri9–11 who named the transformations following from itthe “inertial transformations.” Among the outstanding fea-tures of the inertial transformation, we mention that theyassume the existence of an absolute speed �and rest� of abody and absolute simultaneity of events for different ob-servers moving with a relative velocity. It is beyond thescope of this paper to discuss in more detail the respectiveexpressions for invariant vectors that can be derived from theinertial transformations.
VI. SUGGESTED PROBLEMS
�1� Derive Eq. �3�.�2� Verify Eq. �18�, which can be understood as the transfor-mation for electric and magnetic fields directly from thetransformation of the Lorentz force.
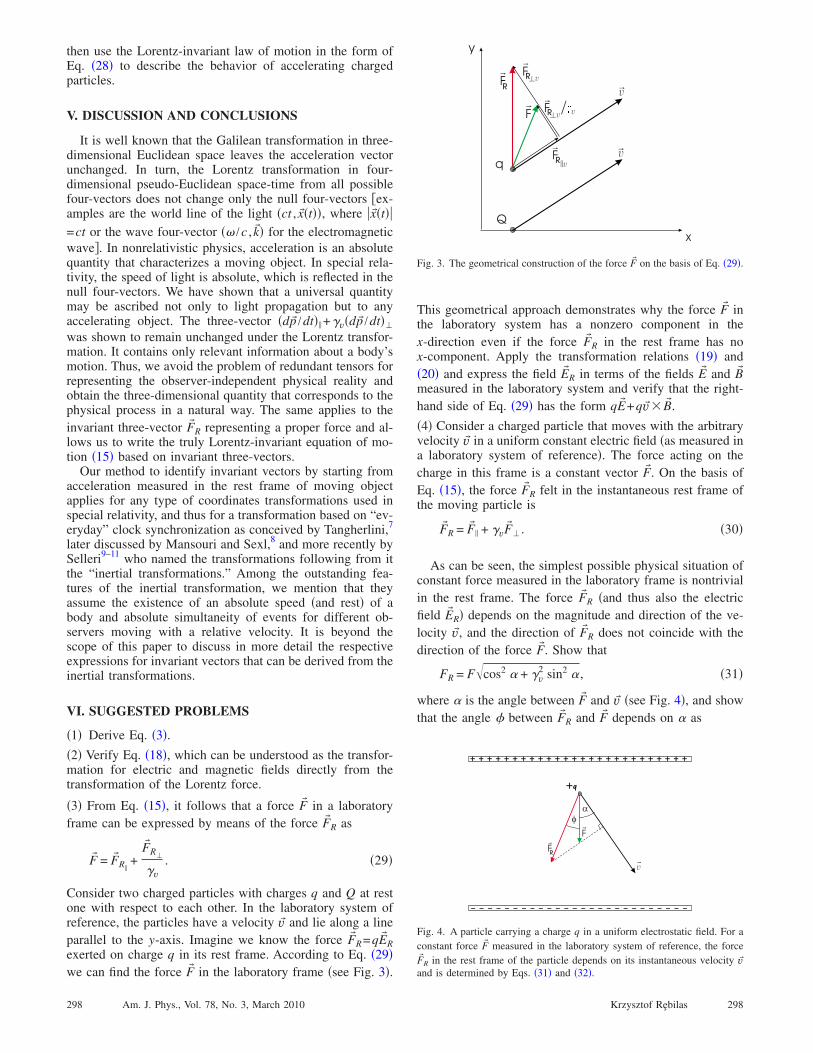
�3� From Eq. �15�, it follows that a force F� in a laboratoryframe can be expressed by means of the force F� R as
F� = F� R�+
F� R�
�v. �29�
Consider two charged particles with charges q and Q at restone with respect to each other. In the laboratory system ofreference, the particles have a velocity v� and lie along a lineparallel to the y-axis. Imagine we know the force F� R=qE� Rexerted on charge q in its rest frame. According to Eq. �29�
�
we can find the force F in the laboratory frame �see Fig. 3�.298 Am. J. Phys., Vol. 78, No. 3, March 2010
This geometrical approach demonstrates why the force F� inthe laboratory system has a nonzero component in thex-direction even if the force F� R in the rest frame has nox-component. Apply the transformation relations �19� and�20� and express the field E� R in terms of the fields E� and B�measured in the laboratory system and verify that the right-hand side of Eq. �29� has the form qE� +qv� �B� .
�4� Consider a charged particle that moves with the arbitraryvelocity v� in a uniform constant electric field �as measured ina laboratory system of reference�. The force acting on thecharge in this frame is a constant vector F� . On the basis ofEq. �15�, the force F� R felt in the instantaneous rest frame ofthe moving particle is
F� R = F� � + �vF� �. �30�
As can be seen, the simplest possible physical situation ofconstant force measured in the laboratory frame is nontrivialin the rest frame. The force F� R �and thus also the electricfield E� R� depends on the magnitude and direction of the ve-locity v� , and the direction of F� R does not coincide with thedirection of the force F� . Show that
FR = F�cos2 � + �v2 sin2 � , �31�
where � is the angle between F� and v� �see Fig. 4�, and showthat the angle � between F� R and F� depends on � as
q
Q
y
x
F
F
F
F
F
v
v
RR
R
R
v
v
v
v
Fig. 3. The geometrical construction of the force F� on the basis of Eq. �29�.
F
F
v
R
��
++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++ ++
__ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __
+q+q
Fig. 4. A particle carrying a charge q in a uniform electrostatic field. For aconstant force F� measured in the laboratory system of reference, the forceF� R in the rest frame of the particle depends on its instantaneous velocity v�
and is determined by Eqs. �31� and �32�.298Krzysztof Rebilas

���� = arccos�1 + cos2 � + �2�v − 1�sin2 �
2�cos2 � + �v2 sin2 �� . �32�
Plots of the function ���� for different values of �v areshown in Fig. 5.
Note that, in practice, to calculate the motion of a particleon the basis of Eq. �15�, it is convenient to refer to forces�fields� in a laboratory system of reference because in typicalsituations they are much simpler than in the instantaneous
Fig. 5. The angle � between the force F� R and F� as a function of the angle� between the force F� and the velocity of the particle v� .
particle’s rest frame. The example is the situation of a uni-
299 Am. J. Phys., Vol. 78, No. 3, March 2010
form electrostatic field that appears not to be constant in therest frame of the particle. Another example is Coulomb’slaw, which is valid only for the case when the source chargeis at rest, which is commonly realized in laboratory systemsbut is usually not satisfied in the rest frame of a movingobject. Therefore, to solve the equation of motion �22� weshould rewrite it in the form of Eq. �24� and, omitting theprojections of the vectors, use it in the form of the standardequation of motion �16�.
ACKNOWLEDGMENTS
The author wishes to thank P. Prawda for inspiring him toelaborate the issues discussed in this paper. He is grateful tothe anonymous reviewers for their helpful comments thatimproved the final version of the paper.
a�Electronic mail: [email protected]. Galilei, Dialogue Concerning the Two Chief World Systems, translatedby S. Drake �U. of California Press, Berkeley, CA, 1953�, pp. 186–187.
2I. Newton, Mathematical Principles of Natural Philosophy and His Sys-tem of the World. The Motion of Bodies, translated by A. Motte, revisedby F. Cajori �U. of California Press, Berkeley, 1934�, Vol. 1, pp. 88–89.
3H. Poincaré, “Les principes de la physique-mathématique,” Bull. Sci.Math. 28, 302–324 �1904�.
4A. Einstein, “Zur elektrodynamik bewegter Körper,” Ann. Phys. 322,891–921 �1905�.
5J. D. Jackson, Classical Electrodynamics �Wiley, New York, 1962�, Sec.12.2.
6K. Rebilas, “A way to discover Maxwell’s equations theoretically,”Found. Phys. Lett. 19 �4�, 337–351 �2006�.
7F. R. Tangherlini, “An introduction to the general theory of relativity,”Nuovo Cimento, Suppl. 20, 1–86 �1961�.
8R. Mansouri and R. U. Sexl, “A test theory of special relativity: I. Simul-taneity and clock synchronization,” Gen. Relativ. Gravit. 8, 497–513�1977�.
9F. Selleri, “Noninvariant one-way velocity of light,” Found. Phys. 26,641–664 �1996�.
10F. Selleri, in Fundamental Theories of Physics, edited by A. Van derMerwe �Kluwer, Dordrecht, 2003�, pp. 57–77.
11 F. Selleri, “The inertial transformations and the relativity principle,”
Found. Phys. Lett. 18, 325–339 �2005�.299Krzysztof Rebilas