m e c h a t r o n i k und mikrosystemtechnik · vtr mechatronik und mikrosystemtechnik 2010...
TRANSCRIPT

VTR Mechatronik und Mikrosystemtechnik 2010
M E C H A T R O N I K
und
Mikrosystemtechnik
Georg Bretthauer

VTR Mechatronik und Mikrosystemtechnik 2010
Institut für Angewandte Informatik /Automatisierungstechnik (AIA)
Forschungszentrum KarlsruheTechnik und Umwelt
Institut für Angewandte Informatik (IAI)
Georg Bretthauer
Professor für Angewandte Informatik/Automatisierungstechnikan der Universität Karlsruhe (TH)
• Leiter des Instituts für Angewandte Informatik/ Automatisierungstechnik (AIA) am Campus Süd des KIT
• Leiter des Instituts für Angewandte Informatik (IAI) amCampusNord des KIT
VTR Mechatronik und Mikrosystemtechnik 2010
Mechatronik (engl.: mechatronics) setzt sich zusammen aus den Begriffen
Mechanik und Elektronik.
Die japanische Firma Yaskawa Electric Corporation prägte den Begriff 1969 und ließ ihn ab 1971 als Handelsnamen schützen.
Bedeutung: Ergänzung mechanischer Komponentendurch Elektronik in der Gerätetechnik
Seit 1982 ist der Begriff frei verfügbar.
Es existieren verschiedene Definitionen.
Definition Definition derder MechatronikMechatronik

VTR Mechatronik und Mikrosystemtechnik 2010
MECHATRONIK ist ein neues, interdisziplinäres technisches Fachgebiet, das auf dem klassischen Maschinenbau und der klassischen Elektrotechnik aufbaut und diese beiden Fachgebiete sowohl untereinander als auch mit den Fachgebieten der Automatisierungstechnik und der Informatik verbindet.
Im Mittelpunkt der MECHATRONIK steht dabei dieganzheitliche Entwicklung von Systemen aus technischen Komponenten („Mecha“), die mit einerintelligenten Steuerung („tronik“) versehen sind.

VTR Mechatronik und Mikrosystemtechnik 2010
Werden Sensoren, Signalverarbeitung und Aktoren ineiner miniaturisierten Bauform so zu einem Gesamt-system verknüpft, daß sie „empfinden“, „entscheiden“und „reagieren“ können, spricht man von einemMIKROSYSTEM. (BMBF, 1994)
MIKROSYSTEMTECHNIK ist die Gesamtheit aller Objekte sowie Verfahren zur Herstellung von Mikro-systemen. (Knoll, 1994)
Mikrosystemtechnik: Systeme im Mikro-Bereich
Mechatronik: Systeme im Makro-Bereich
Definition Definition derder MikrosystemtechnikMikrosystemtechnik
103_3005

VTR Mechatronik und Mikrosystemtechnik 2010
103_003
EntwurfKonstruktion
mechanischesTeilsystem
elektronischesTeilsystem
Ganzheitlicher Entwurf
Mechatronisches Gesamtsystem

VTR Mechatronik und Mikrosystemtechnik 2010
Kognitive Automobile
ABC – Preview
Das vorausschauende Fahrwerk
Dissertation Schindler 2009

VTR Mechatronik und Mikrosystemtechnik 2010
Daimler AG
Vorausschauendes Fahrwerk

VTR Mechatronik und Mikrosystemtechnik 2010
Kognitive Automobile
TR-28 KIT – TU München
Fahrerloses Fahren
Urban Challenge 2009

VTR Mechatronik und Mikrosystemtechnik 2010
M. Werling KIT
Fahrtrichtungswechsel

VTR Mechatronik und Mikrosystemtechnik 2010
Humanoide Roboter
SFB - 588 KIT
Informatik – Maschinenbau - Elektrotechnik
Roboter hilft in der Küche
CeBit 2009

VTR Mechatronik und Mikrosystemtechnik 2010
Flasche Wasser reichen
T. Asfour KIT

VTR Mechatronik und Mikrosystemtechnik 2010
Künstliche Hände
FZK – KIT
SFB - 588 KIT
Entwicklung einer Künstlichen Hand
Programmorientierte Forschungsförderung

VTR Mechatronik und Mikrosystemtechnik 2010
KÜNSTLICHE HÄNDE- Vision und Wirklichkeit -
Kopplung von Technik und Organismus

VTR Mechatronik und Mikrosystemtechnik 2010
Zeigefinger ZylindergriffLateralgriff
Hakengriff Pinzettengriff
Griffarten

VTR Mechatronik und Mikrosystemtechnik 2010
Signalerfassung
Sensor 1 Sensor 2
bipolare Potentialableitung
ab
c
d
e
Myoelektroden (a), Li-Ion-Akku (b), Steuerungselektronik (c), Pumpe (d), Ventile (e)
Steuerungssystem

VTR Mechatronik und Mikrosystemtechnik 2010
Klinische Erprobung Orthopädie Heidelberg

VTR Mechatronik und Mikrosystemtechnik 2010
Fünf Griffarten (60% möglicher Griffe)
S. Schulz FZK

VTR Mechatronik und Mikrosystemtechnik 2010
Technik – Organismus Organismus - Organismus

VTR Mechatronik und Mikrosystemtechnik 2010
Piza et al., Universität Insbruck
o. Univ.-Prof. Dr. H. Piza
VTR Mechatronik und Mikrosystemtechnik 2010
Annähen natürlicher Hände Universität Innsbruck
H. Piza Innsbruck

VTR Mechatronik und Mikrosystemtechnik 2010
Sinneswahrnehmung
- Kräfte spüren
- Temperatur fühlen
- Oberflächenbeschaffenheit wahrnehmen
- Schmerz empfinden

VTR Mechatronik und Mikrosystemtechnik 2010
Prinzip einer Kraftrückkopplung
VTR Mechatronik und Mikrosystemtechnik 2010
Patiententest
S. Mounier FZK

VTR Mechatronik und Mikrosystemtechnik 2010
Intelligente Steuerung
Signalverarbeitung
Steuerung
VTR Mechatronik und Mikrosystemtechnik 2010
Anlernen von Bewegungen
S. Schulz FZK

VTR Mechatronik und Mikrosystemtechnik 2010
Künstliches Akkommodationssystem
FZK – KIT
Mechatronik - Mikrosystemtechnik
Entwicklung eines intelligenten Implantates

VTR Mechatronik und Mikrosystemtechnik 2010
Vision
Keiner soll in Zukunft mehr eine Brille brauchen
oder
Sehen wie ein Adler

VTR Mechatronik und Mikrosystemtechnik 2010
Motivation1. Presbyopie (Altersichtigkeit)
0Alter [Jahre]
14
55
Duane [1912]
Verlust der Akkommodationsfähigkeit
Akk
omm
odat
ions
brei
te[d
pt]
Abhilfe schafft eine Brille
1,4 Milliarden Menschen

VTR Mechatronik und Mikrosystemtechnik 2010
Motivation2. Katarakt (Grauer Star)
Wiederherstellung der Sicht durch Implantation einer starren IOL
*Acri.Tec
Verlust der Akkommodationsfähigkeit
ca. 7 Mio. Implantationen weltweit/Jahr.
Ziel: Wiederherstellung der Akkommodationsfähigkeit

VTR Mechatronik und Mikrosystemtechnik 2010
2. Konzepte
1. Akkommodative IOL
2. Femtosekunden-Laser Behandlung
3. Lens refilling
4. Mechatronischer Ansatz

VTR Mechatronik und Mikrosystemtechnik 2010
Vision: Künstliches Akkommodationssystembasierend auf Nano- und Mikrotechnologien
KIT

VTR Mechatronik und Mikrosystemtechnik 2010
Wiederherstellung der Akkommodationsfähigkeit
Künstliches Akkommodationssystem

VTR Mechatronik und Mikrosystemtechnik 2010
Systemstruktur
Medizin – Ingenieurwissenschaften - Naturwissenschaften

VTR Mechatronik und Mikrosystemtechnik 2010
Künstliches Akkomodationssystem
Aktiv-optisches Element Informationserfassung
Steuerung/RegelungAktorelemente
Energieversorgung
Systemintegration
Kommunikation

VTR Mechatronik und Mikrosystemtechnik 2010
3. Ergebnisse
• Aktiv-optisches Element
• Informationserfassung
• Aktoren
• Energieversorgung
• Steuerung
• Systemintegration
VTR Mechatronik und Mikrosystemtechnik 2010
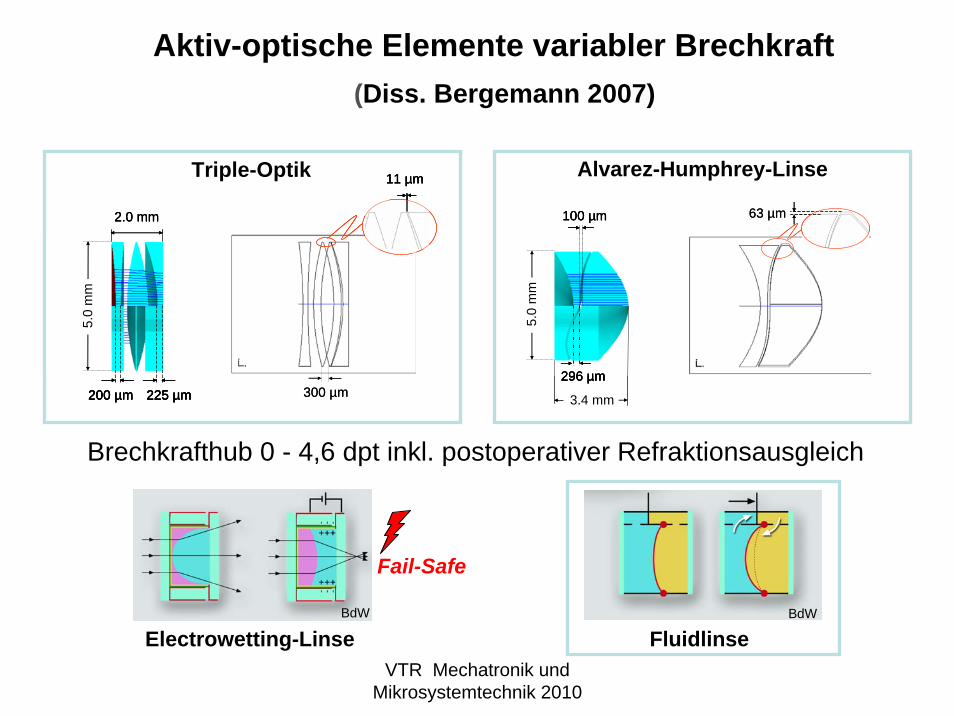
Brechkrafthub 0 - 4,6 dpt inkl. postoperativer Refraktionsausgleich
(Diss. Bergemann 2007)
Electrowetting-Linse Fluidlinse
Alvarez-Humphrey-LinseTriple-Optik
BdWBdW
296 µm
100 µm
3.4 mm
5.0
mm
296 µm
100 µm
3.4 mm
5.0
mm
296 µm296 µm296 µm
100 µm100 µm
3.4 mm
5.0
mm
5.0
mm
63 µm63 µm
300 µm
11 µm
300 µm
11 µm11 µm
225 µm200 µm
5.0
mm
2.0 mm
225 µm200 µm 225 µm225 µm200 µm200 µm
5.0
mm
5.0
mm
2.0 mm2.0 mm
Aktiv-optische Elemente variabler Brechkraft
Fail-Safe

VTR Mechatronik und Mikrosystemtechnik 2010
Magnetfeldsensor
Erfassung des Akkommodationsbedarfs
VergenzwinkelPupillennahreaktion
GMR sensing Region
Ta (4.5 nm)FeMn (7.5 nm)NiFe (3.5 nm)Co (0.5 nm)Cu (2.5 nm)NiFe (3.5 nm)Co (0.5 nm)Ta (4.5 nm)Si
GMR sensing Region
Ta (4.5 nm)FeMn (7.5 nm)NiFe (3.5 nm)Co (0.5 nm)Cu (2.5 nm)NiFe (3.5 nm)Co (0.5 nm)Ta (4.5 nm)Si
GMR sensing Region
Ta (4.5 nm)FeMn (7.5 nm)NiFe (3.5 nm)Co (0.5 nm)Cu (2.5 nm)NiFe (3.5 nm)Co (0.5 nm)Ta (4.5 nm)Si
NVE
20 µm
SONY
Sensorzeile
(Diss. Klink 2008)

VTR Mechatronik und Mikrosystemtechnik 2010
Energieversorgung
FunktionenMinimierung der VerlusteÜberwachung derEnergiespeicher
AnforderungenVersorgung des Systems mit 1 mWdurchschnittlicher LeistungLebensdauer 30 JahreAutonome Betriebszeit min. 24 h
Diss. Nagel 2011

VTR Mechatronik und Mikrosystemtechnik 2010
Energiegewinnung (harvesting)
Thermische Wandler
Glucose Brennstoffzellen
Mechanische Wandler
Induktive Einkopplung
Energiemanagement
IMTEKIMTEK
MicropeltMicropelt
*Acri.Tec*Acri.Tec
StarcapStarcap
SpeicherungLi-Ion, Li-Polymer DünnschichtbatterienSuperkondensatoren
Strom-sammler Kathodenmaterial
SeperatorAnodenmaterial
AluminiumParylene C
StromsammlerSubstratFhGIZM
250 µm

VTR Mechatronik und Mikrosystemtechnik 2010
Steuerung/Regelung
Software Architektur Low Power Mikroelektronik
Ungehäuste Chips: 3 x 3 mm
Kontaktabstand: 35 µm
Kontaktgröße: ~60 x 60 µm

VTR Mechatronik und Mikrosystemtechnik 2010
Systemintegration
Anforderungen
Gewährleistung der Biokompatibilität des Implantats, Sterilisierbarkeit
Einhaltung der gesetzlichen Bestim-mungen, z.B. Medizinproduktegesetz
Sicherstellung der Funktion des mechatronischen Systems im Körperumfeld für 30 Jahre
Transparenz im optischen Bereich

VTR Mechatronik und Mikrosystemtechnik 2010
Gehäuse Lösungsansätze am Beispiel Alvarez-Humphrey-Linse
Polymer Glas

VTR Mechatronik und Mikrosystemtechnik 2010
Layoutentwurf für Demonstrator
Extern:• Antenne für
Transceiver• Spule für Energie-
einpeisung• Energiespeicher• Aktor mit Ansteu-
erungselektronik• Optik• Gehäuse

VTR Mechatronik und Mikrosystemtechnik 2010
Demonstrator II

VTR Mechatronik und Mikrosystemtechnik 2010
Ausblick

VTR Mechatronik und Mikrosystemtechnik 2010
Mechatronik und Mikrosystemtechnik
Zusammenarbeit mehrerer Institute (gemäß Definition):
AIA Institut für Angewandte Informatik/ Automatisierungs-technik (Prof. Bretthauer)
IPEK Institut für Produktentwicklung (Prof. Albers)
IMR Insitut für Mess- und Regelungstechnik (Prof. Stiller)
ITM Institut für Technische Mechanik (Prof. Böhlke, Prof. Seemann, Prof. Proppe)

VTR Mechatronik und Mikrosystemtechnik 2010
Lehrveranstaltungen AIA
Einführung in die Mechatronik (3 SWS)Fachpraktikum Mechatronik (4 SWS)Technische Informatik (2 SWS)Übungen zur Technischen Informatik (1 SWS)Computational Intelligence I (2 SWS)Computational Intelligence III (2 SWS)Computational Intelligence II (2 SWS)Adaptive Regelungssysteme (2 SWS)
schwarz: Sommersemesterrot: Wintersemester

VTR Mechatronik und Mikrosystemtechnik 2010
Mechatronik• Möglicher Schwerpunkt in den Vertiefungsrichtungen
p – M+M
w – B.Sc., M.Sc., E+U, FzgT, PEK, PT, ThM
• Allgemein gilt:–mind. 12 LP für einen Schwerpunkt–davon mind. 8 aus Kernmodulfächern (K)–Details findet man im Studienplan
• Hinweis:– Welche Lehrveranstaltungen aktuell angeboten werden, ist dem
Vorlesungsverzeichnis zu entnehmen.
Professor Bretthauer06.07.2011

VTR Mechatronik und Mikrosystemtechnik 2010
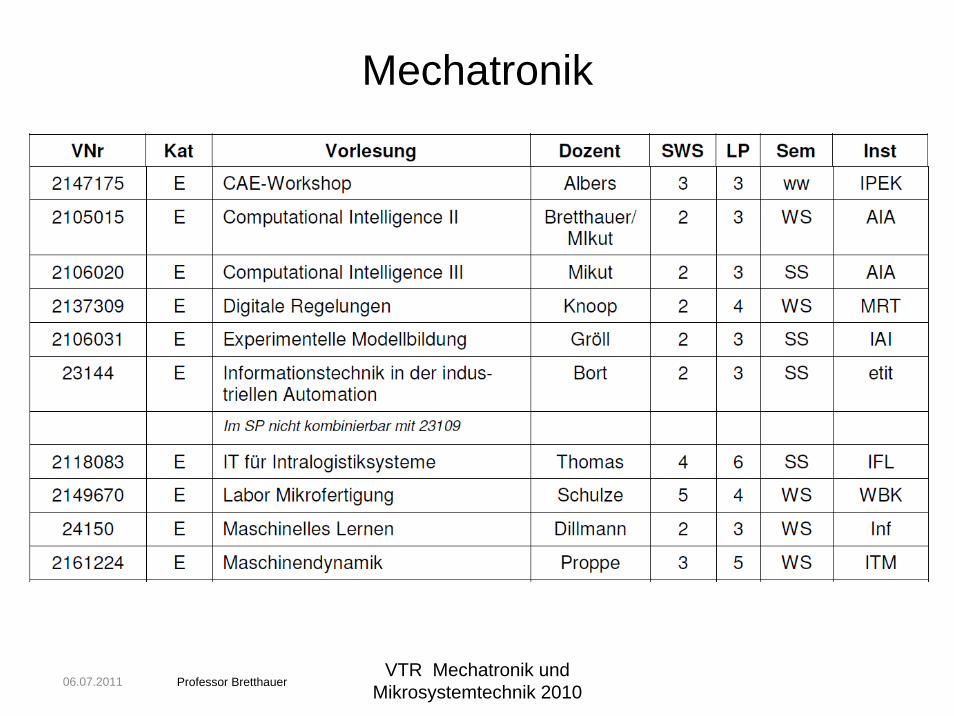
Mechatronik
Professor Bretthauer06.07.2011
Min
d. 8
LP
Min
d. 8
LP
VTR Mechatronik und Mikrosystemtechnik 2010
Mechatronik
Professor Bretthauer06.07.2011

VTR Mechatronik und Mikrosystemtechnik 2010
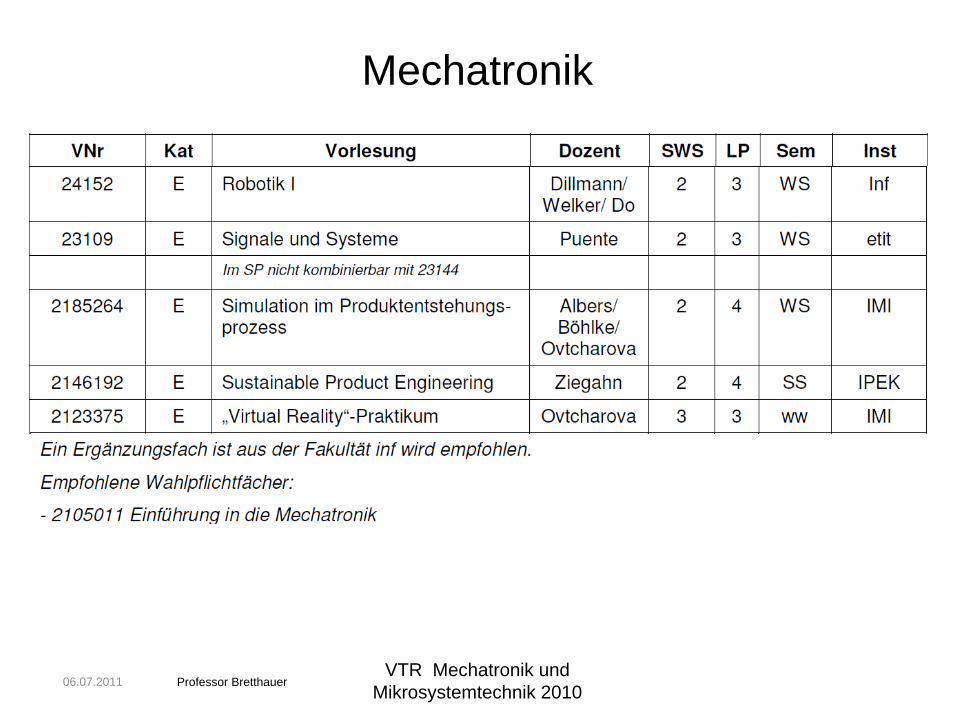
Mechatronik
Professor Bretthauer06.07.2011

VTR Mechatronik und Mikrosystemtechnik 2010
Mechatronik
Professor Bretthauer06.07.2011
VTR Mechatronik und Mikrosystemtechnik 2010
Mechatronik
Professor Bretthauer06.07.2011

VTR Mechatronik und Mikrosystemtechnik 2010
Ausstattung
Rechnerlabor mit PC für Praktika, Programmierung, graphische SimulationsanwendungenRoboterlabor für PraktikaProgrammpakete und Simulationswerkzeuge zur Bearbeitung von Forschungsprojekten
Für die Durchführung der Forschungsarbeiten können die Einrichtungen des KIT Campus Nord und Campus Süd benutzt werden.

VTR Mechatronik und Mikrosystemtechnik 2010
Vielen Dank für Ihre Aufmerksamkeit!