mass calibration with robotic comparators · mass calibration with robotic comparators 2013 ncsli...
TRANSCRIPT

Mass Calibration with Robotic Comparators 2013 NCSLI Workshop and Symposium
Mettler Toledo
SPG Metrology
Mark Kliebenschädel

1
Content
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity

2
Content
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity

3
Learning Objectives
How to become a productive mass lab
How is dissemination carried out on a robotic
comparator
Understanding relevant factors for robotic
weighing
Set-up of ideal weighing process to improve
efficiency
How to improve the security of your
calibration process

4
Content
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity

5
Principle of a Robotic Comparator
1. Mass Comparator Balance
2. 3-Axis Robotic System
3. Magazine
4. Indicator Unit
5. Robot Housing
6. Robot Arm

6
Principle of a Robotic Comparator
Robotic Weighing Systems capable of measuring all classes from 50 µg to 20kg.
a107 (1g to 100g) a5XL (50µg to 5g) AX32004-M10 (1kg to 20kg)

7
Principle of a Robotic Comparator
Depending on the type and accuracy, a window
range comparator is used. This requires the
loading of additional dial weights.
Robotic Systems switch weights automatically
according to the nominal load.
It allows calibration of weight set with different
nominal weights without interference

8
Content
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity

9
Security
To minimize risks, many features are implemented into a robotic system
Optimized Robot Arm Speed Safety Doors / E-Stop
Carrier detection Weight detection Secure Data Management
Balance Position Sensor

10
Security
In Mass Calibration a repetitive measurement is usually performed.
Potentially higher risk of "mixing up" or losing a weight, especially for
smaller weights.
Less risk if weights are calibrated on a robotic system

11
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity
Content

12
Accuracy & Performance
Balance stands separate to avoid possible vibrations
coming from the robotic system
Ball bearing technology allows precise positioning and smooth,
vibration-free movement
Weights experience less abrasion if handled by a robotic
system. Reference weights will remain longer within the
tolerance of their class

13
Accuracy & Performance
No human influence /errors, such as imprecise
placement of the weight
Better performance and accuracy can be achieved with a robotic
system compared to a manual comparator
Possibility of setting a start delay for the
measurement allows the weights to acclimatize
Software considers drift of balance by using ABA /
ABBA method
Overnight measurements can be performed

14
Content
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity

15
Influence of cornerload
The cornerload is the deviation in the measurement value caused by eccentric loading of a
weight on to the weighing pan.
Robotic systems with fixed or with a so-called "LevelMatic" weighing pan are available.
Weight will be centered automatically to
the center of gravity. Eccentricity error is
negligible
Only 1. vs 1 comparisons possible
With a fixed weighing the weight has to be
centered/positioned very accurately.

16
Influence of cornerload
Carrier of a5 Carrier and Inserts of a100 Carrier of a1000
Selecting best suitable carrier will prevent a minimum of eccentricity effect
To achieve best possible accuracy, the weight carrier principle is applied.
The carriers have different recesses with different diameters, or are
adjustable to the right size of the weights diameter.

17
Content
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity

18
Dissemination
The dissemination method is used to calibrate
the unknown masses (weights set) by using
only one reference weight and working
downwards or upwards
If an asymmetrical scheme is chosen, for
instance 5g vs. 3g + 2g an automatic
correction is made to the measured value
Up to 3 weights can be loaded on to the
weighing pan. This is done symmetrically to
avoid eccentric load errors

19
Dissemination
• The dissemination of a full weights set can be very time-
consuming and difficult to achieve if carried on a manual
comparator.
• To calibrate a decade (for example 1g to 100mg),
10 measurement groups are necessary.

20
Content
Learning Objectives
Principle of a robotic comparator
Security
Accuracy & Performance
Influence of Cornerload
Dissemination
Productivity

Heusser Neweigh
21
Productivity
Mettler Toledo USA
TROEMNER
NIST

22
Productivity
Robotic comparators have been continuously improved over the
past years to perform more efficiently and productively, but still
fulfilling the accuracy needed to calibrate according to the
required uncertainties
Software able to measure several customer weight sets placed on the magazine.
Report for each customer is generated
Import of jobs possible while robot is still in progress
Optimum ergonomic location of the magazine for faster loading
Larger magazine sizes
Standards centering history
Sending of e-mails if measurement is completed, has started or aborts
IMPORT
23
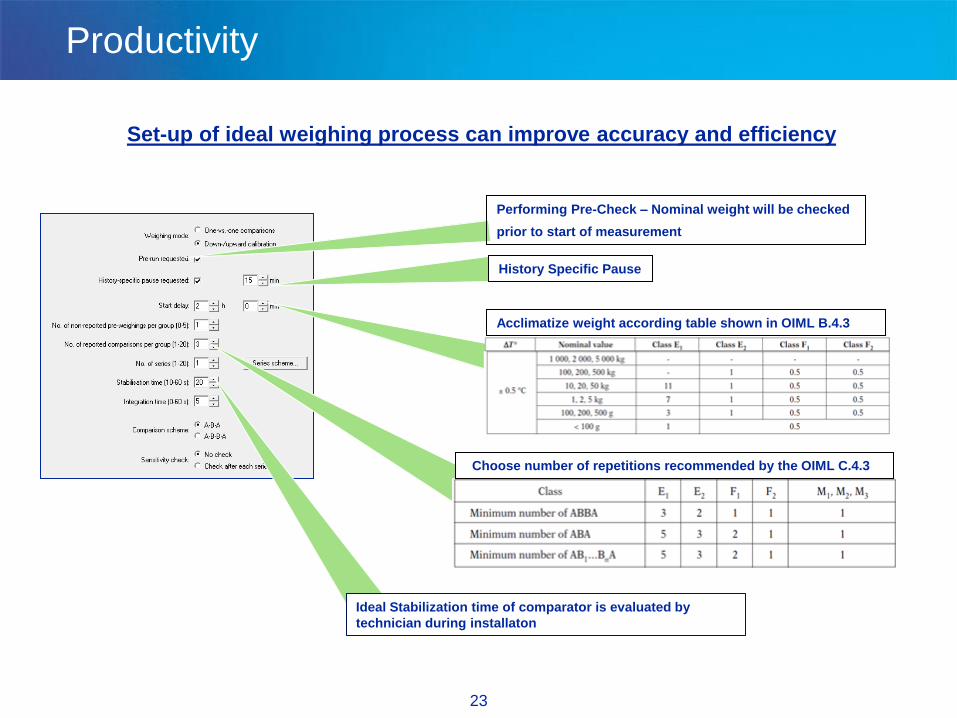
Productivity
Set-up of ideal weighing process can improve accuracy and efficiency
Performing Pre-Check – Nominal weight will be checked
prior to start of measurement
Acclimatize weight according table shown in OIML B.4.3
Choose number of repetitions recommended by the OIML C.4.3
Ideal Stabilization time of comparator is evaluated by
technician during installaton
History Specific Pause

24
Summary
Robotic Comparators are not only used for maximum
throughput, also for maximization of security
Dissemination can be carried out easily on a robot
Robotic comparators allow the calibration of weights
starting from 50µg to 20kg for all weight classes
Many features are implemented to improve accuracy,
efficiency and productivity of a robotic system

Thank you !
Mettler Toledo
SPG Metrology
Mark Kliebenschädel