mce 565 wave motion & vibration in continuous...
TRANSCRIPT
MCE 565
Wave Motion & Vibration in Continuous Media
Spring 2005
Professor M. H. Sadd
Introduction to Finite Element Methods

Need for Computational Methods
• Solutions Using Either Strength of Materials or Theory of
Elasticity Are Normally Accomplished for Regions and
Loadings With Relatively Simple Geometry
• Many Applicaitons Involve Cases with Complex Shape,
Boundary Conditions and Material Behavior
• Therefore a Gap Exists Between What Is Needed in
Applications and What Can Be Solved by Analytical Closed-
form Methods
• This Has Lead to the Development of Several
Numerical/Computational Schemes Including: Finite
Difference, Finite Element and Boundary Element Methods

Introduction to Finite Element Analysis
The finite element method is a computational scheme to solve field problems in
engineering and science. The technique has very wide application, and has been used on
problems involving stress analysis, fluid mechanics, heat transfer, diffusion, vibrations,
electrical and magnetic fields, etc. The fundamental concept involves dividing the body
under study into a finite number of pieces (subdomains) called elements (see Figure).
Particular assumptions are then made on the variation of the unknown dependent
variable(s) across each element using so-called interpolation or approximation functions.
This approximated variation is quantified in terms of solution values at special element
locations called nodes. Through this discretization process, the method sets up an
algebraic system of equations for unknown nodal values which approximate the
continuous solution. Because element size, shape and approximating scheme can be
varied to suit the problem, the method can accurately simulate solutions to problems of
complex geometry and loading and thus this technique has become a very useful and
practical tool.

Advantages of Finite Element Analysis
- Models Bodies of Complex Shape
- Can Handle General Loading/Boundary Conditions
- Models Bodies Composed of Composite and Multiphase Materials
- Model is Easily Refined for Improved Accuracy by Varying
Element Size and Type (Approximation Scheme)
- Time Dependent and Dynamic Effects Can Be Included
- Can Handle a Variety Nonlinear Effects Including Material
Behavior, Large Deformations, Boundary Conditions, Etc.

Basic Concept of the Finite Element Method
Any continuous solution field such as stress, displacement,
temperature, pressure, etc. can be approximated by a
discrete model composed of a set of piecewise continuous
functions defined over a finite number of subdomains.
Exact Analytical Solution
x
T
Approximate Piecewise
Linear Solution
x
T
One-Dimensional Temperature Distribution

Two-Dimensional Discretization
-1-0.5
00.5
11.5
22.5
3
1
1.5
2
2.5
3
3.5
4
-3
-2
-1
0
1
2
xy
u(x,y)
Approximate Piecewise
Linear Representation
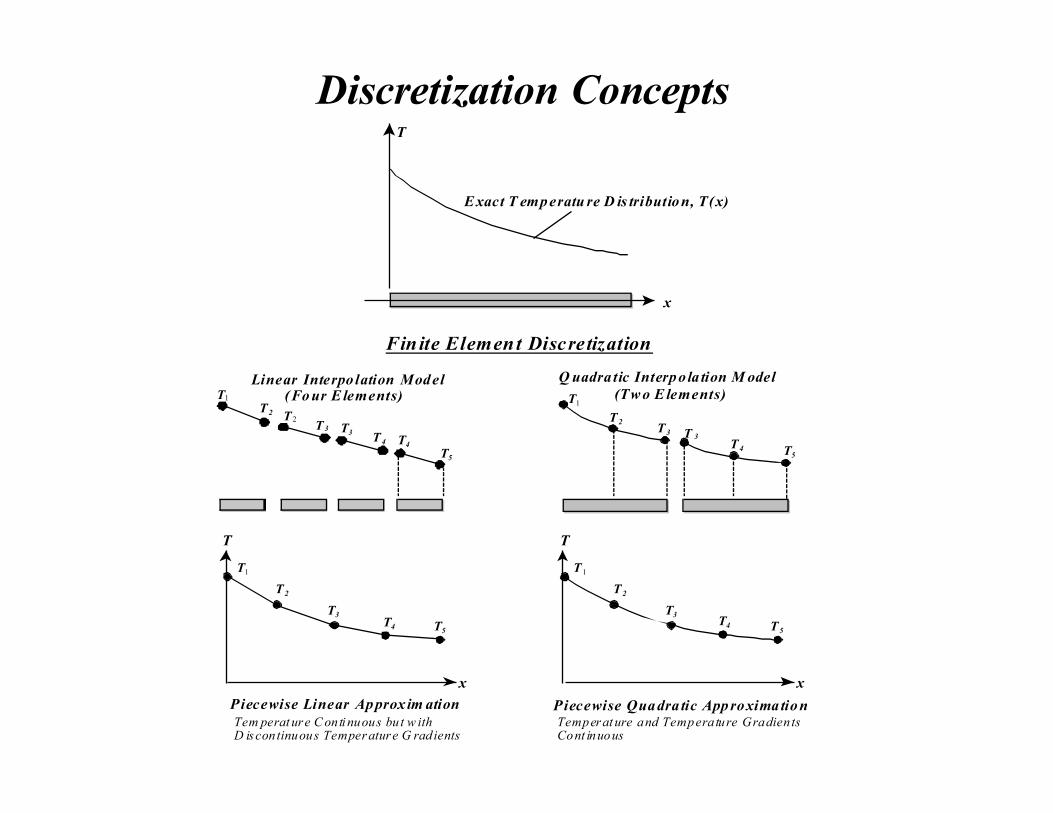
Discretization Concepts
x
T
E xact T emperatu re D is tribution, T(x)
Fin ite Elemen t Discretization
Linear Interpo lation Model (Four E lements)
Q uadra tic Interpo la tion M odel
(Tw o E lements)
T1
T 2 T 2T 3 T3
T 4 T4
T5
T1
T 2
T3
T4 T5
Piecewise Linear Approx im ation
T
x
T1
T 2T 3 T 3
T 4 T5
T
T 1
T 2
T3T4 T 5
Piecewise Quadra tic Approximation
x
Tem perature Conti nuous bu t w ith D iscontinuous Temperature G radients
Temperature and Temperature Gradien tsCont inuous
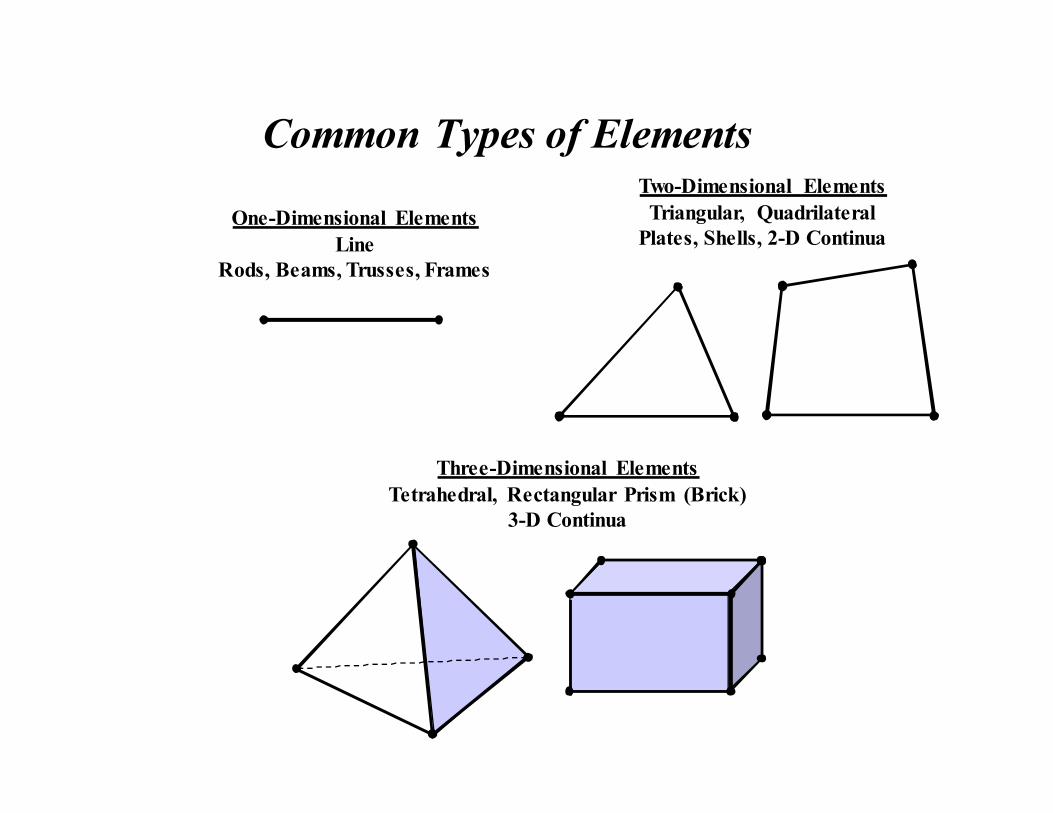
Common Types of Elements
One-Dimensional Elements
Line
Rods, Beams, Trusses, Frames
Two-Dimensional Elements
Triangular, Quadrilateral
Plates, Shells, 2-D Continua
Three-Dimensional Elements
Tetrahedral, Rectangular Prism (Brick)
3-D Continua
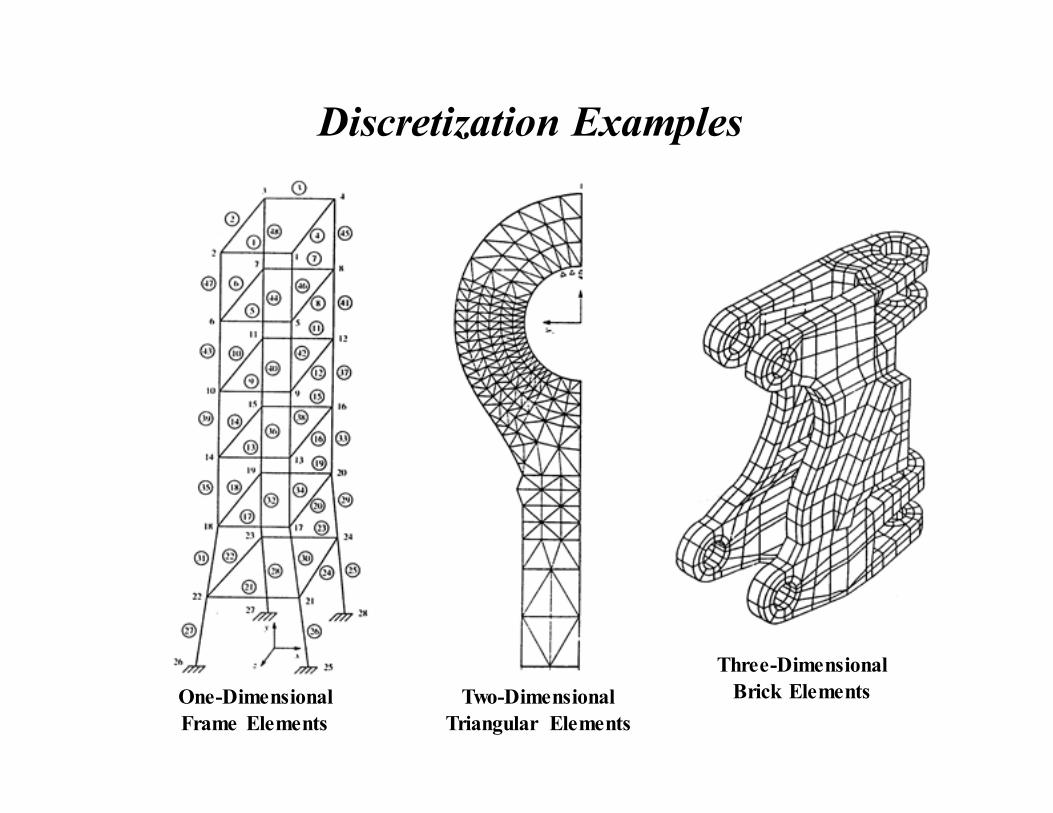
Discretization Examples
One-Dimensional
Frame Elements
Two-Dimensional
Triangular Elements
Three-Dimensional
Brick Elements
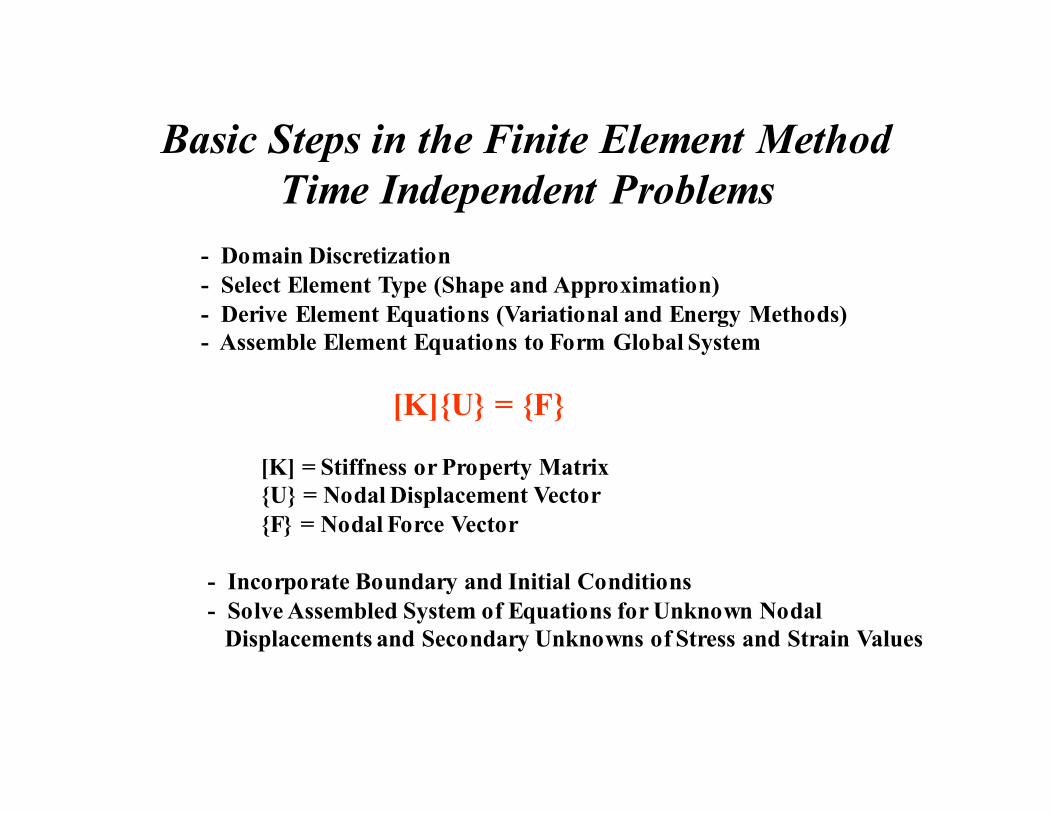
Basic Steps in the Finite Element Method
Time Independent Problems
- Domain Discretization
- Select Element Type (Shape and Approximation)
- Derive Element Equations (Variational and Energy Methods)
- Assemble Element Equations to Form Global System
[K]U = F
[K] = Stiffness or Property Matrix
U = Nodal Displacement Vector
F = Nodal Force Vector
- Incorporate Boundary and Initial Conditions
- Solve Assembled System of Equations for Unknown Nodal
Displacements and Secondary Unknowns of Stress and Strain Values
Common Sources of Error in FEA
• Domain Approximation
• Element Interpolation/Approximation
• Numerical Integration Errors
(Including Spatial and Time Integration)
• Computer Errors (Round-Off, Etc., )
Measures of Accuracy in FEA
Accuracy
Error = |(Exact Solution)-(FEM Solution)|
Convergence
Limit of Error as:
Number of Elements (h-convergence)
or
Approximation Order (p-convergence)
Increases
Ideally, Error →→→→ 0 as Number of Elements or
Approximation Order →→→→ ∞∞∞∞

Two-Dimensional Discretization Refinement
(Discretization with 228 Elements)
(Discretization with 912 Elements)
(Triangular Element)
(Node)
••••
••••
••••

One Dimensional Examples
Static Case
1 2
u1 u2
Bar Element
Uniaxial Deformation of Bars
Using Strength of Materials Theory
Beam Element
Deflection of Elastic Beams
Using Euler-Bernouli Theory
1 2
w1 w2
θθθθ2
θθθθ1
dx
duau
qcuaudx
d
,
:ionSpecificat CondtionsBoundary
0)(
: EquationalDifferenti
=−+−
)(,,,
:ionSpecificat CondtionsBoundary
)()(
: EquationalDifferenti
2
2
2
2
2
2
2
2
dx
wdb
dx
d
dx
wdb
dx
dww
xfdx
wdb
dx
d=−

Two Dimensional Examples
u1
u2
1
2
3 u3
v1
v2
v3
1
2
3
φφφφ 1111
φφφφ 2222
φφφφ 3333
Triangular Element
Scalar-Valued, Two-Dimensional
Field Problems
Triangular Element
Vector/Tensor-Valued, Two-
Dimensional Field Problems
yxn
yn
xdn
d
yxfyx
∂φ∂
+∂
φ∂=
φφ
=∂
φ∂+
∂
φ∂
,
:ionSpecificat CondtionsBoundary
),(
: Equationial DifferentExample
2
2
2
2
yxy
yxx
y
x
ny
vC
x
uCn
x
v
y
uCT
nx
v
y
uCn
y
vC
x
uCT
Fy
v
x
u
y
Ev
Fy
v
x
u
x
Eu
∂∂
+∂∂
+
∂∂
+∂∂
=
∂∂
+∂∂
+
∂∂
+∂∂
=
=+
∂∂
+∂∂
∂∂
ν−+∇µ
=+
∂∂
+∂∂
∂∂
ν−+∇µ
221266
661211
2
2
Conditons Boundary
0)1(2
0)1(2
ents Displacemof Terms in Equations FieldElasticity

Development of Finite Element Equation • The Finite Element Equation Must Incorporate the Appropriate Physics
of the Problem
• For Problems in Structural Solid Mechanics, the Appropriate Physics
Comes from Either Strength of Materials or Theory of Elasticity
• FEM Equations are Commonly Developed Using Direct, Variational-
Virtual Work or Weighted Residual Methods
Variational-Virtual Work Method
Based on the concept of virtual displacements, leads to relations between internal and
external virtual work and to minimization of system potential energy for equilibrium
Weighted Residual Method
Starting with the governing differential equation, special mathematical operations
develop the “weak form” that can be incorporated into a FEM equation. This
method is particularly suited for problems that have no variational statement. For
stress analysis problems, a Ritz-Galerkin WRM will yield a result identical to that
found by variational methods.
Direct Method
Based on physical reasoning and limited to simple cases, this method is
worth studying because it enhances physical understanding of the process
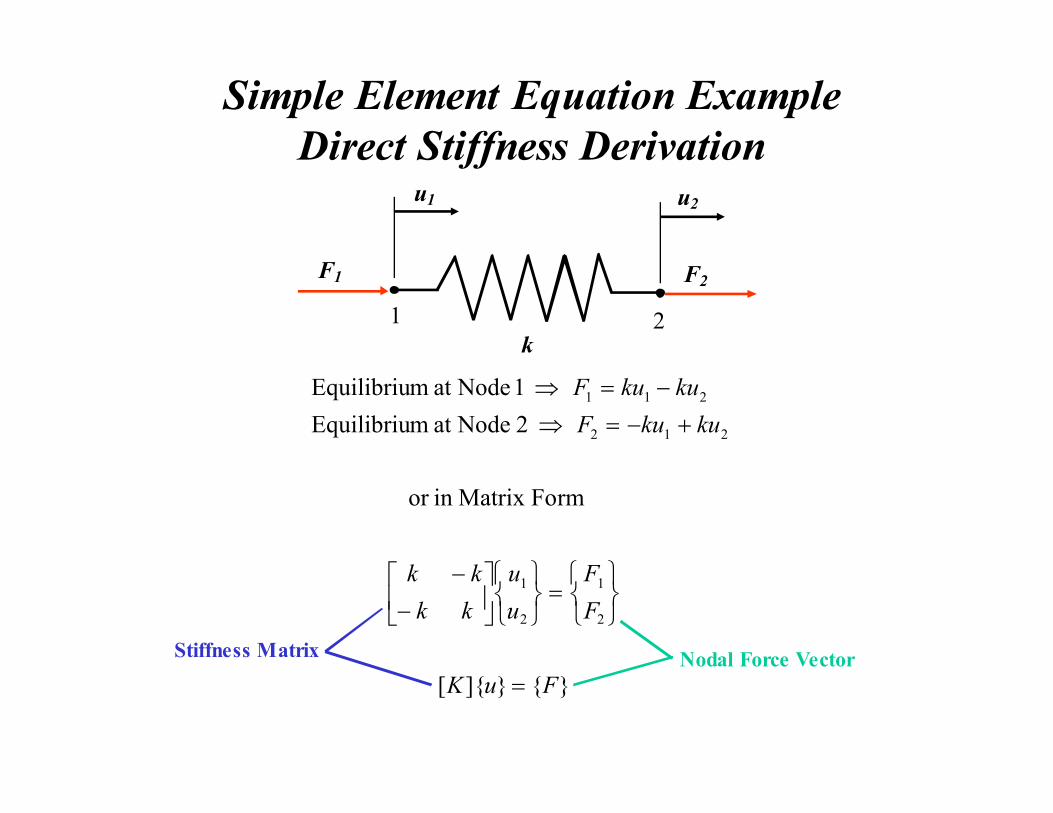
Simple Element Equation Example
Direct Stiffness Derivation
1 2 k
u1 u2
F1 F2
][
rm Matrix Foinor
2 Nodeat mEquilibriu
1 Nodeat mEquilibriu
2
1
2
1
212
211
FuK
F
F
u
u
kk
kk
kukuF
kukuF
=
=
−
−
+−=⇒
−=⇒
Stiffness Matrix Nodal Force Vector

Common Approximation Schemes
One-Dimensional Examples
Linear Quadratic Cubic
Polynomial Approximation
Most often polynomials are used to construct approximation
functions for each element. Depending on the order of
approximation, different numbers of element parameters are
needed to construct the appropriate function.
Special Approximation
For some cases (e.g. infinite elements, crack or other singular
elements) the approximation function is chosen to have special
properties as determined from theoretical considerations
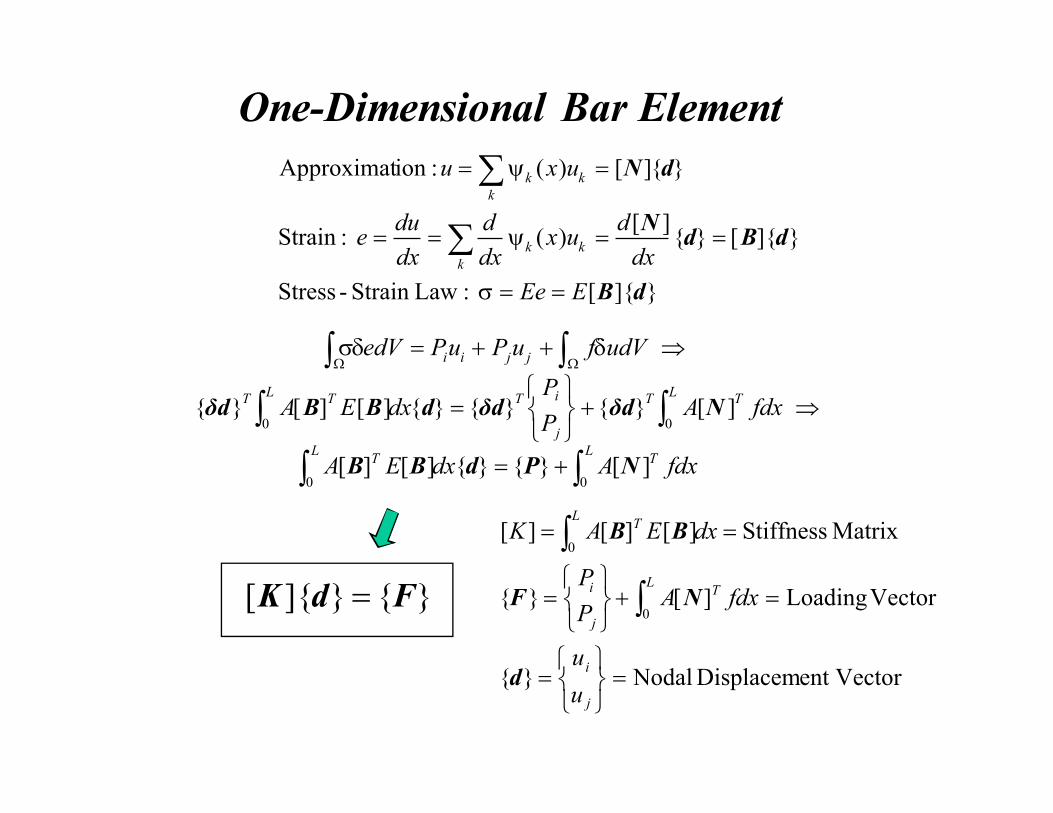
One-Dimensional Bar Element
⇒δ++=δσ ∫∫ ΩΩudVfuPuPedV
jjii
][ : LawStrain-Stress
][][
)( :Strain
][)( :ionApproximat
dB
dBdN
dN
EEe
dx
dux
dx
d
dx
due
uxu
k
kk
k
kk
==σ
==ψ==
=ψ=
∑
∑
⇒+
= ∫∫L
TT
j
iTL
TTfdxA
P
PdxEA
00][][][ NδdδddBBδd
∫∫ +=L
TL
T fdxAdxEA00
][][][ NPdBB
Vectorent DisplacemNodal
Vector Loading][
MatrixStiffness][][][
0
0
=
=
=+
=
==
∫
∫
j
i
LT
j
i
LT
u
u
fdxAP
P
dxEAK
d
NF
BB
][ FdK =

One-Dimensional Bar Element
A = Cross-sectional Area
E = Elastic Modulus
f(x) = Distributed Loading
dVuFdSuTdVe iV
iS
i
n
iijV
ijt
δ+δ=δσ ∫∫∫
Virtual Strain Energy = Virtual Work Done by Surface and Body Forces
For One-Dimensional Case
∫∫ ΩΩδ++=δσ udVfuPuPedV jjii
Ω
(i) (j)
Axial Deformation of an Elastic Bar
Typical Bar Element
dx
duAEP i
i−=
dx
duAEP
j
j−=
iu
ju
L
x
(Two Degrees of Freedom)
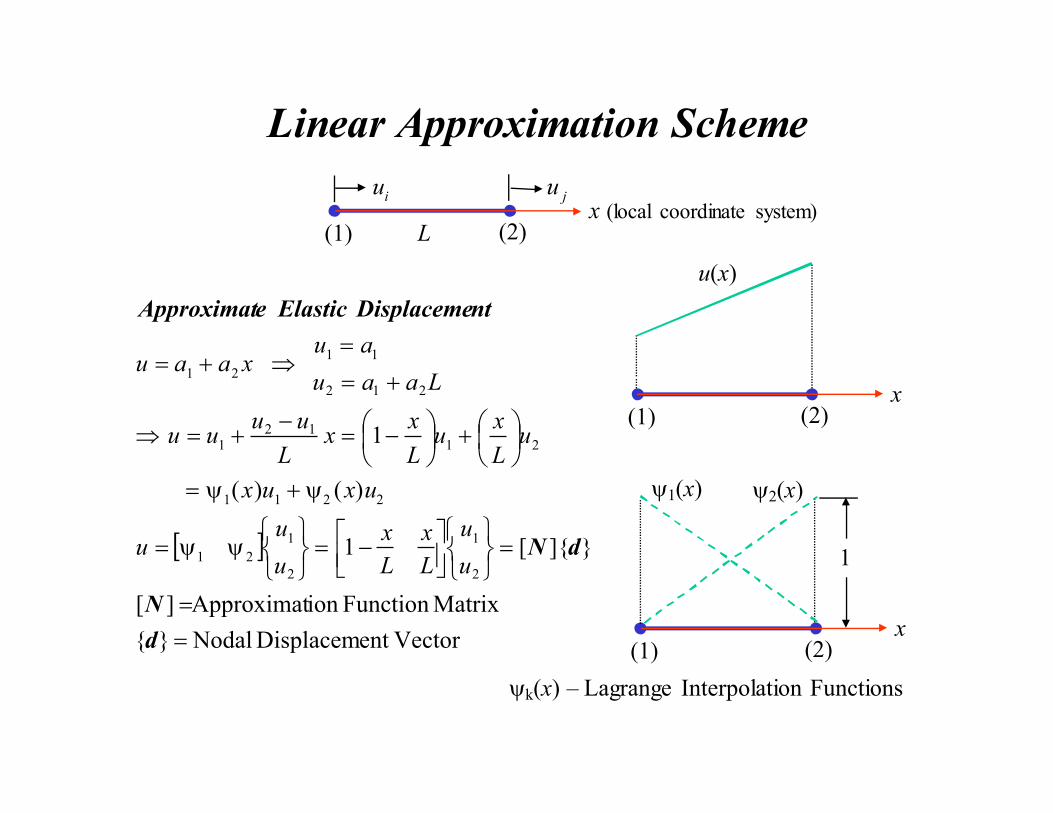
Linear Approximation Scheme
[ ]
Vectorent DisplacemNodal
Matrix FunctionionApproximat][
][1
)()(
1
2
1
2
1
21
2211
2112
1
212
11
21
=
=
=
−=
ψψ=
ψ+ψ=
+
−=
−+=⇒
+=
=⇒+=
d
N
dN
ntDisplacemeElasticeApproximat
u
u
L
x
L
x
u
uu
uxux
uL
xu
L
xx
L
uuuu
Laau
auxaau
x (local coordinate system) (1) (2)
iu
ju
L
x (1) (2)
u(x)
x (1) (2)
ψ1(x) ψ2(x)
1
ψk(x) – Lagrange Interpolation Functions

Element Equation Linear Approximation Scheme, Constant Properties
Vectorent DisplacemNodal
1
1
2][
11
1111
1
1
][][][][][
2
1
2
1
02
1
02
1
00
=
=
+
=
−+
=+
=
−
−=
−
−===
∫∫
∫∫
u
u
LAf
P
Pdx
L
xL
x
AfP
PfdxA
P
P
L
AEL
LL
L
LAEdxAEdxEAK
oL
o
LT
LT
LT
d
NF
BBBB
+
=
−
−⇒=
1
1
211
11][
2
1
2
1 LAf
P
P
u
u
L
AE oFdK
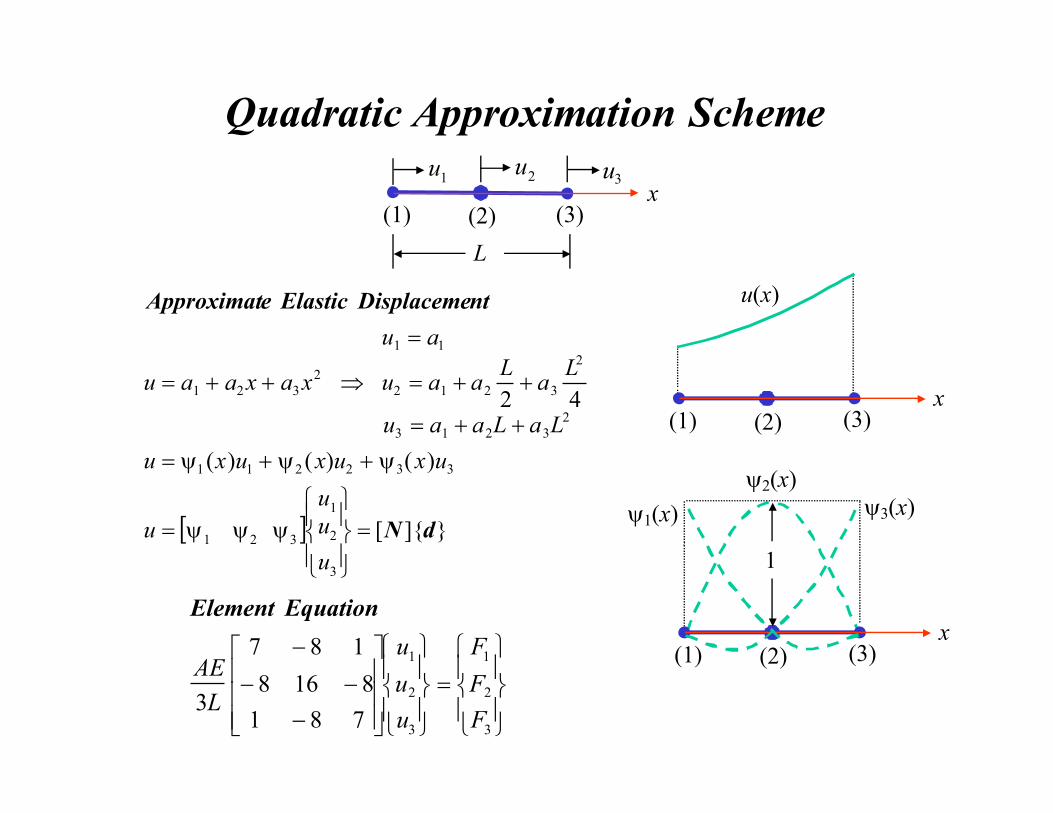
Quadratic Approximation Scheme
[ ] ][
)()()(
42
3
2
1
321
332211
2
3213
2
3212
11
2
321
dN
ntDisplacemeElasticeApproximat
=
ψψψ=
ψ+ψ+ψ=
++=
++=
=
⇒++=
u
u
u
u
uxuxuxu
LaLaau
La
Laau
au
xaxaau
x (1) (3)
1u
3u
(2)
2u
L
u(x)
x (1) (3) (2)
x (1) (3) (2)
1
ψ1(x) ψ3(x)
ψ2(x)
=
−
−−
−
3
2
1
3
2
1
781
8168
187
3F
F
F
u
u
u
L
AE
EquationElement

Lagrange Interpolation Functions Using Natural or Normalized Coordinates
11 ≤ξ≤−
ξ
(1) (2) )1(
2
1
)1(2
1
2
1
ξ+=ψ
ξ−=ψ
)1(2
1
)1)(1(
)1(2
1
3
2
1
ξ+ξ=ψ
ξ+ξ−=ψ
ξ−ξ−=ψ
)1)(3
1)(
3
1(
16
9
)3
1)(1)(1(
16
27
)3
1)(1)(1(
16
27
)3
1)(
3
1)(1(
16
9
4
3
2
1
ξ+ξ−ξ+−=ψ
ξ+ξ+ξ−=ψ
ξ−ξ+ξ−=ψ
ξ−ξ+ξ−−=ψ
ξ
(1) (2) (3)
ξ
(1) (2) (3) (4)
≠
==ξψ
ji
jiji
,0
,1)(
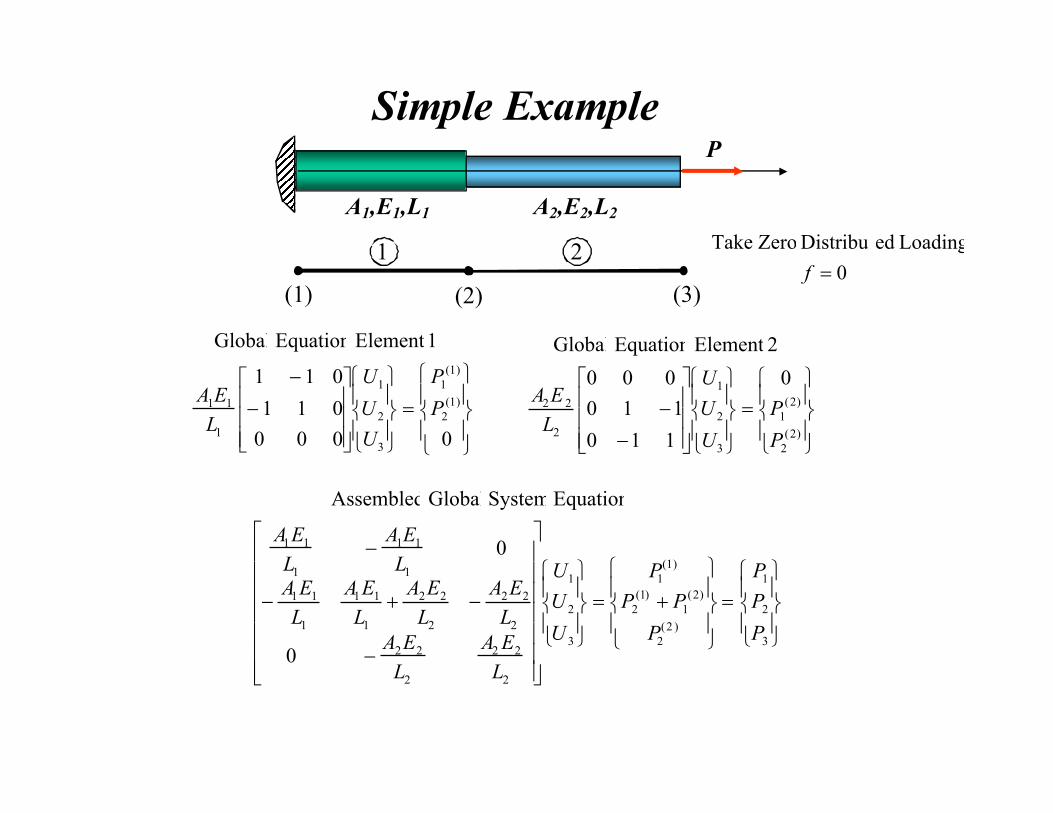
Simple Example P
A1,E1,L1 A2,E2,L2
(1) (3) (2)
1 2
=
−
−
0000
011
011
1 Element EquationGlobal
)1(
2
)1(
1
3
2
1
1
11 P
P
U
U
U
L
EA
=
−
−)2(
2
)2(
1
3
2
1
2
22
0
110
110
000
2 Element EquationGlobal
P
P
U
U
U
L
EA
=
+=
−
−+−
−
3
2
1
)2(
2
)2(
1
)1(
2
)1(
1
3
2
1
2
22
2
22
2
22
2
22
1
11
1
11
1
11
1
11
0
0
EquationSystem Global Assembled
P
P
P
P
PP
P
U
U
U
L
EA
L
EA
L
EA
L
EA
L
EA
L
EA
L
EA
L
EA
0
Loadinged DistributZero Take
=f

Simple Example Continued
P
A1,E1,L1 A2,E2,L2
(1) (3) (2)
1 2
0
0
ConditionsBoundary
)2(
1
)1(
2
)2(
2
1
=+
=
=
PP
PP
U
=
−
−+−
−
P
P
U
U
L
EA
L
EA
L
EA
L
EA
L
EA
L
EA
L
EA
L
EA
0
0
0
0
EquationSystem Global Reduced
)1(
1
3
2
2
22
2
22
2
22
2
22
1
11
1
11
1
11
1
11
=
−
−+
PU
U
L
EA
L
EA
L
EA
L
EA
L
EA
0
3
2
2
22
2
22
2
22
2
22
1
11
LEA ,,Properties
mFor Unifor
=
−
−
PU
U
L
AE 0
11
12
3
2
PPAE
PLU
AE
PLU −===⇒ )1(
132 ,2
, Solving
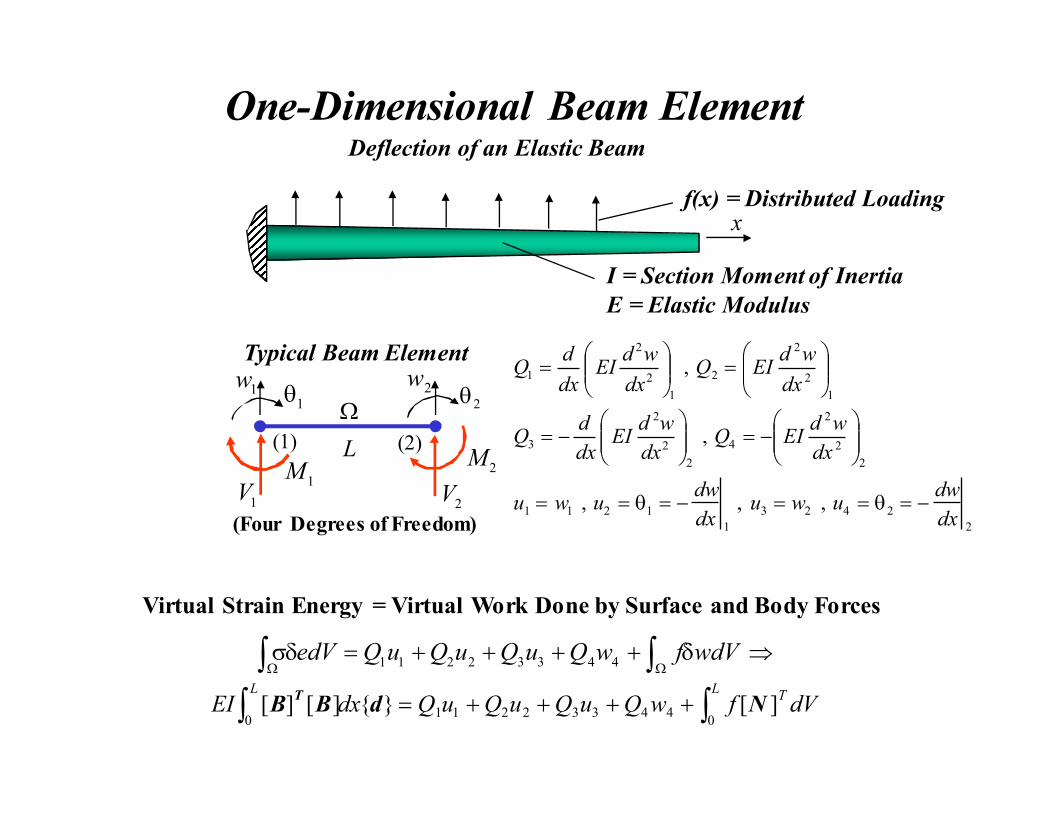
One-Dimensional Beam Element Deflection of an Elastic Beam
2
2423
1
1211
2
2
2
4
2
2
2
3
1
2
2
2
1
2
2
1
,,,
,
,
dx
dwuwu
dx
dwuwu
dx
wdEIQ
dx
wdEI
dx
dQ
dx
wdEIQ
dx
wdEI
dx
dQ
−=θ==−=θ==
−=
−=
=
=
I = Section Moment of Inertia
E = Elastic Modulus
f(x) = Distributed Loading
Ω (1) (2)
Typical Beam Element
1w
L
2w
1θ
2θ
1M 2
M
1V
2V
x
Virtual Strain Energy = Virtual Work Done by Surface and Body Forces
⇒δ++++=δσ ∫∫ ΩΩwdVfwQuQuQuQedV
44332211
∫∫ ++++=L
TL
dVfwQuQuQuQdxEI0
443322110
][][][ NdBBT
(Four Degrees of Freedom)

Beam Approximation Functions To approximate deflection and slope at each
node requires approximation of the form
3
4
2
321)( xcxcxccxw +++=
Evaluating deflection and slope at each node
allows the determination of ci thus leading to
FunctionsionApproximat Cubic Hermite theare where
,)()()()()( 44332211
i
uxuxuxuxxw
φ
φ+φ+φ+φ=
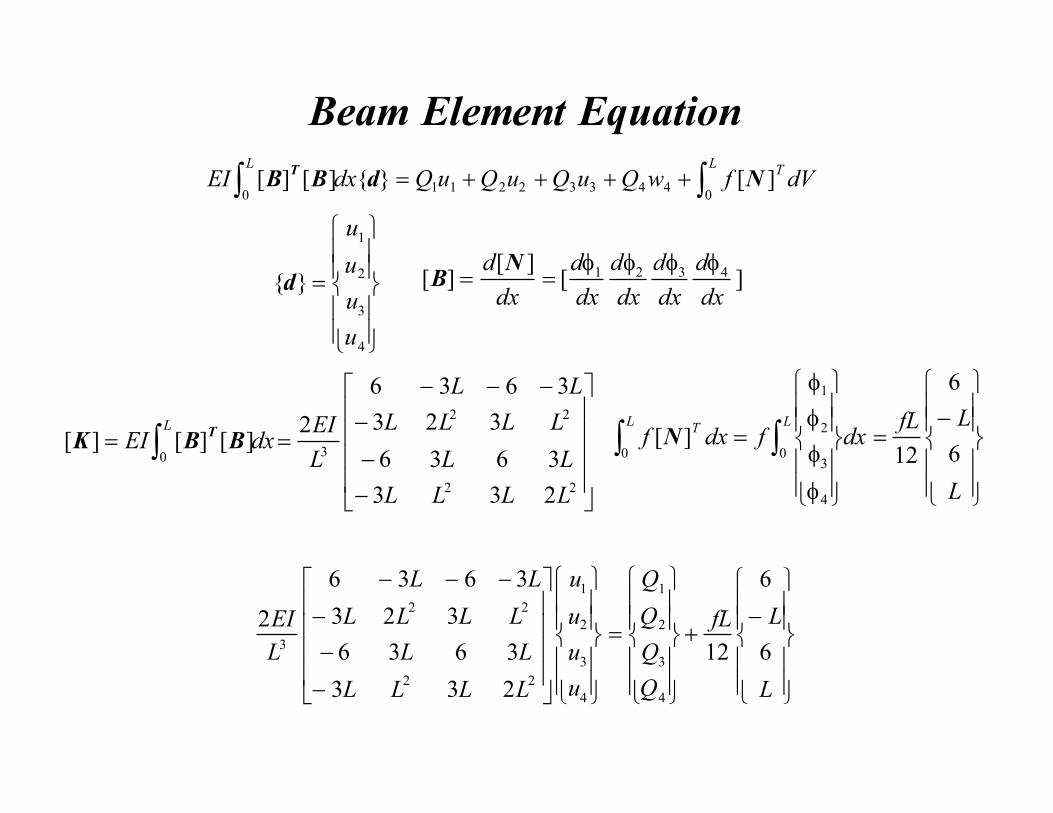
Beam Element Equation
∫∫ ++++=L
TL
dVfwQuQuQuQdxEI0
443322110
][][][ NdBBT
=
4
3
2
1
u
u
u
u
d ][][
][ 4321
dx
d
dx
d
dx
d
dx
d
dx
d φφφφ==
NB
−
−
−
−−−
== ∫22
22
30
233
3636
323
3636
2][][][
LLLL
LL
LLLL
LL
L
EIdxEI
L
BBKT
−+
=
−
−
−
−−−
L
LfL
Q
Q
Q
Q
u
u
u
u
LLLL
LL
LLLL
LL
L
EI
6
6
12
233
3636
323
3636
2
4
3
2
1
4
3
2
1
22
22
3
−=
φ
φ
φ
φ
= ∫∫L
LfLdxfdxf
LLT
6
6
12][
0
4
3
2
1
0N
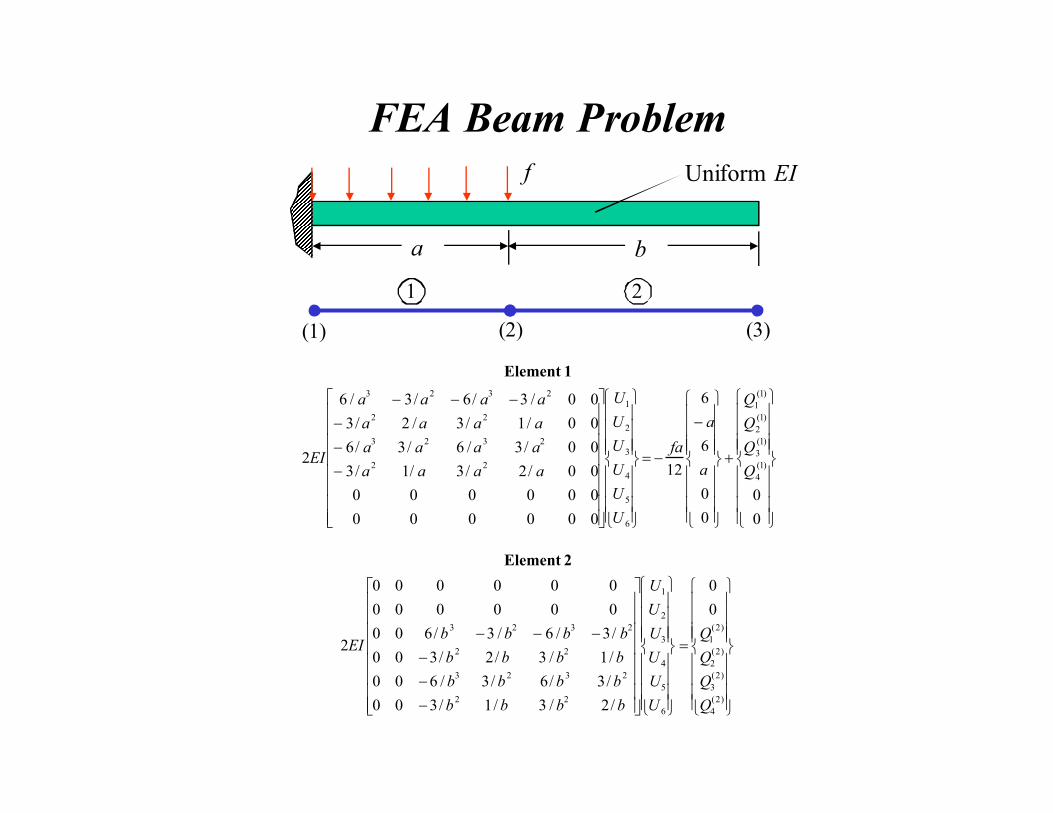
FEA Beam Problem
f
a b
Uniform EI
+
−
−=
−
−
−
−−−
0
0
0
0
6
6
12
000000
000000
00/2/3/1/3
00/3/6/3/6
00/1/3/2/3
00/3/6/3/6
2)1(
4
)1(
3
)1(
2
)1(
1
6
5
4
3
2
1
22
2323
22
2323
Q
Q
Q
Q
a
a
fa
U
U
U
U
U
U
aaaa
aaaa
aaaa
aaaa
EI
1Element
=
−
−
−
−−−
)2(
4
)2(
3
)2(
2
)2(
1
6
5
4
3
2
1
22
2323
22
2323
0
0
/2/3/1/300
/3/6/3/600
/1/3/2/300
/3/6/3/600
000000
000000
2
Q
Q
Q
Q
U
U
U
U
U
U
bbbb
bbbb
bbbb
bbbbEI
2Element
(1) (3) (2)
1 2
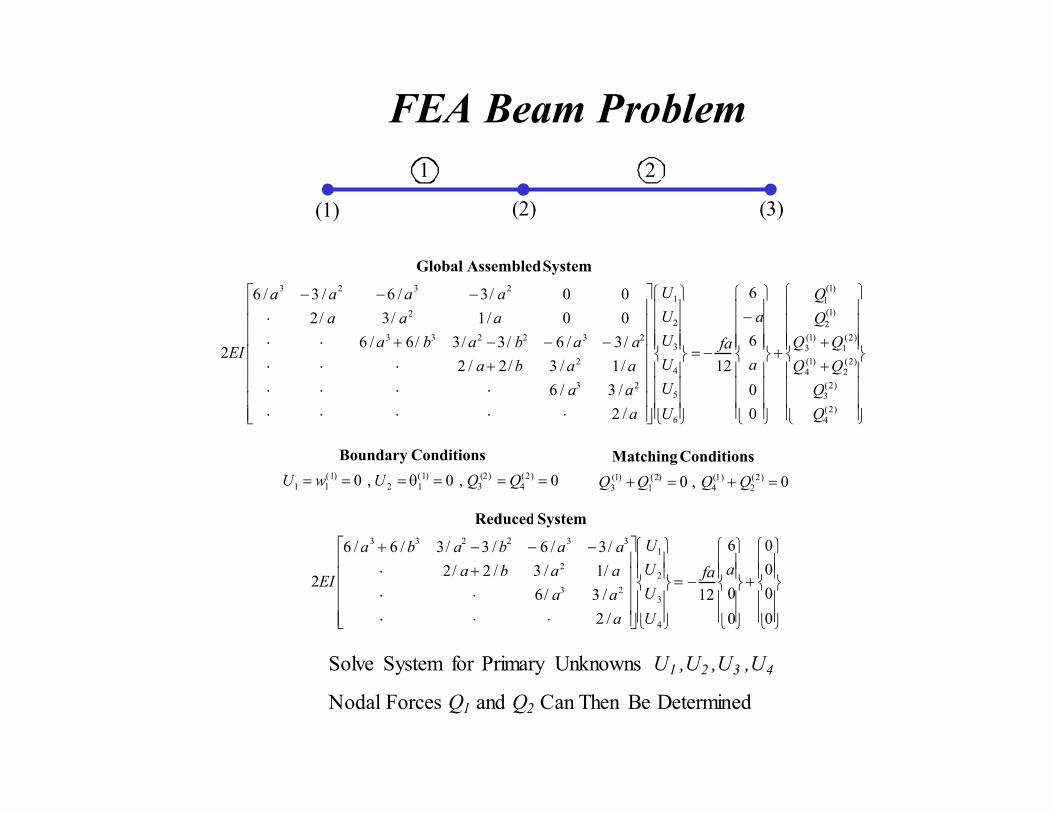
FEA Beam Problem
+
++
−
−=
⋅⋅⋅⋅⋅
⋅⋅⋅⋅
+⋅⋅⋅
−−−+⋅⋅
⋅
−−−
)2(4
)2(3
)2(2
)1(4
)2(1
)1(3
)1(
2
)1(
1
6
5
4
3
2
1
23
2
232233
2
2323
0
0
6
6
12
/2
/3/6
/1/3/2/2
/3/6/3/3/6/6
00/1/3/2
00/3/6/3/6
2
Q
Q
Q
Q
a
a
fa
U
U
U
U
U
U
a
aa
aaba
aababa
aaa
aaaa
EI
System AssembledGlobal
0,0,0 )2(
4
)2(
3
)1(
12
)1(
11 ===θ=== QQUwU
Conditions Boundary
0,0 )2(
2
)1(
4
)2(
1
)1(
3 =+=+ QQQQ
Conditions Matching
+
−=
⋅⋅⋅
⋅⋅
+⋅
−−−+
0
0
0
0
0
0
6
12
/2
/3/6
/1/3/2/2
/3/6/3/3/6/6
2
4
3
2
1
23
2
332233
afa
U
U
U
U
a
aa
aaba
aababa
EI
System Reduced
Solve System for Primary Unknowns U1 ,U2 ,U3 ,U4
Nodal Forces Q1 and Q2 Can Then Be Determined
(1) (3) (2)
1 2

Special Features of Beam FEA
Analytical Solution Gives
Cubic Deflection Curve
Analytical Solution Gives
Quartic Deflection Curve
FEA Using Hermit Cubic Interpolation
Will Yield Results That Match Exactly
With Cubic Analytical Solutions
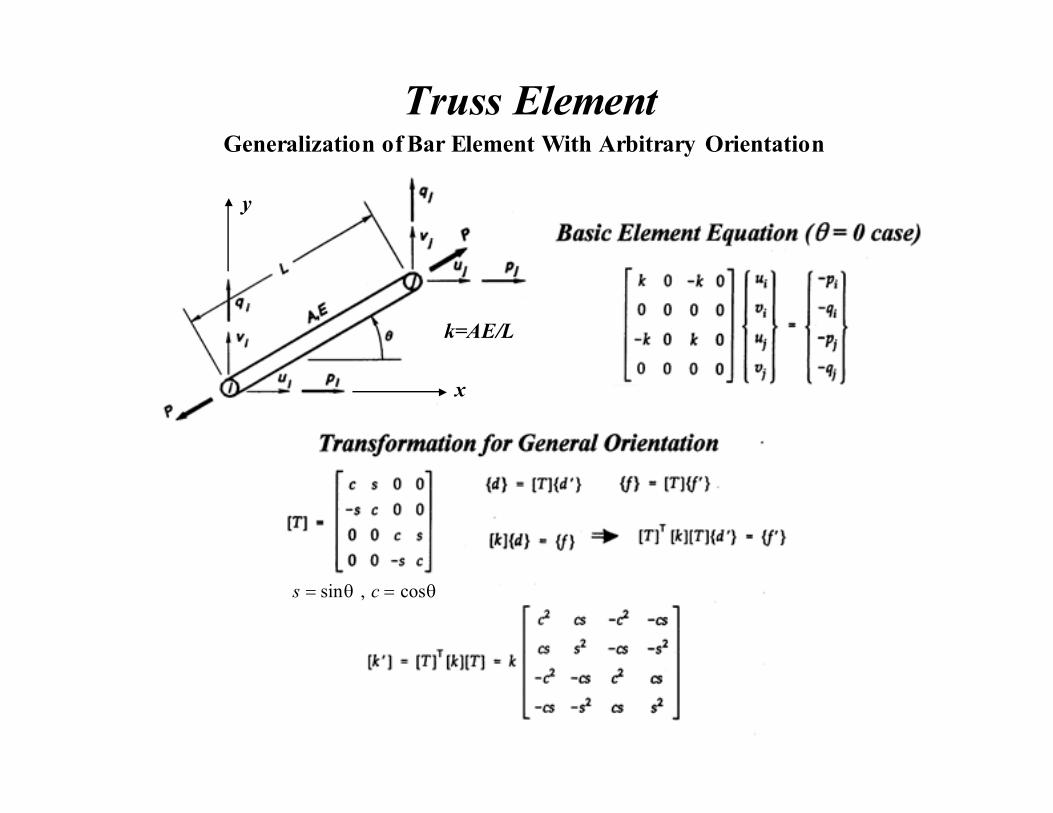
Truss Element Generalization of Bar Element With Arbitrary Orientation
x
y
k=AE/L
θ=θ= cos,sin cs

Frame Element Generalization of Bar and Beam Element with Arbitrary Orientation
Ω (1) (2)
1w
L
2w
1θ 2
θ
1M 2
M
1V
2V
2P1
P1u
2u
=
θ
θ
−
−−−
−
−
−
−
4
3
2
2
1
1
2
2
2
1
1
1
22
2323
22
2323
460
260
6120
6120
0000
260
460
6120
6120
0000
Q
Q
P
Q
Q
P
w
u
w
u
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AEL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AE
Element Equation Can Then Be Rotated to Accommodate Arbitrary Orientation

Some Standard FEA References
Bathe, K.J., Finite Element Procedures in Engineering Analysis, Prentice-Hall, 1982, 1995. Beer, G. and Watson, J.O., Introduction to Finite and Boundary Element Methods for Engineers, John Wiley, 1993 Bickford, W.B., A First Course in the Finite Element Method, Irwin, 1990.
Burnett, D.S., Finite Element Analysis, Addison-Wesley, 1987. Chandrupatla, T.R. and Belegundu, A.D., Introduction to Finite Elements in Engineering, Prentice-Hall, 2002.
Cook, R.D., Malkus, D.S. and Plesha, M.E., Concepts and Applications of Finite Element Analysis, 3rd Ed., John Wiley, 1989. Desai, C.S., Elementary Finite Element Method, Prentice-Hall, 1979.
Fung, Y.C. and Tong, P., Classical and Computational Solid Mechanics, World Scientific, 2001. Grandin, H., Fundamentals of the Finite Element Method, Macmillan, 1986.
Huebner, K.H., Thorton, E.A. and Byrom, T.G., The Finite Element Method for Engineers, 3rd Ed., John Wiley, 1994. Knight, C.E., The Finite Element Method in Mechanical Design, PWS-KENT, 1993. Logan, D.L., A First Course in the Finite Element Method, 2nd Ed., PWS Engineering, 1992.
Moaveni, S., Finite Element Analysis – Theory and Application with ANSYS, 2nd Ed., Pearson Education, 2003. Pepper, D.W. and Heinrich, J.C., The Finite Element Method: Basic Concepts and Applications, Hemisphere, 1992.
Pao, Y.C., A First Course in Finite Element Analysis, Allyn and Bacon, 1986. Rao, S.S., Finite Element Method in Engineering, 3rd Ed., Butterworth-Heinemann, 1998. Reddy, J.N., An Introduction to the Finite Element Method, McGraw-Hill, 1993.
Ross, C.T.F., Finite Element Methods in Engineering Science, Prentice-Hall, 1993. Stasa, F.L., Applied Finite Element Analysis for Engineers, Holt, Rinehart and Winston, 1985.
Zienkiewicz, O.C. and Taylor, R.L., The Finite Element Method, Fourth Edition, McGraw-Hill, 1977, 1989.