microprocesadores - idiazt.net · completar una operación y al mismo tiempo accesa a la memoria de...
TRANSCRIPT

MICROPROCESADORESConceptos Básicos

PARTES QUE FORMAN UN MICROCONTROLADOR:

VENTAJAS DE LOS MICROPROCESADORES:
Aumento de prestaciones
Mayor flexibilidad
Aumento de fiabilidad
Menor consumo de energía
Reducción del precio del producto terminado (en volumen de producción)

CAMPOS DE APLICACIÓN:
Electrodomésticos
Robótica
Sistemas de seguridad
Sistemas de navegación
Adquisición de señales y procesamiento
Biomedicina, etc

CLASIFICACIÓN DE LOS MICROCONTROLADORES:
Por el tamaño del bus de datos:
a) µC de 4 bits
b) µC de 8 bits
c) µC de 16 bits
d) µC de 32 bits, etc.
Por la arquitectura interna de la memoria:
a) Arquitectura Von Neumann
b) Arquitectura Harvard
Por el tipo de microprocesador:
a) CISC
b) RISC
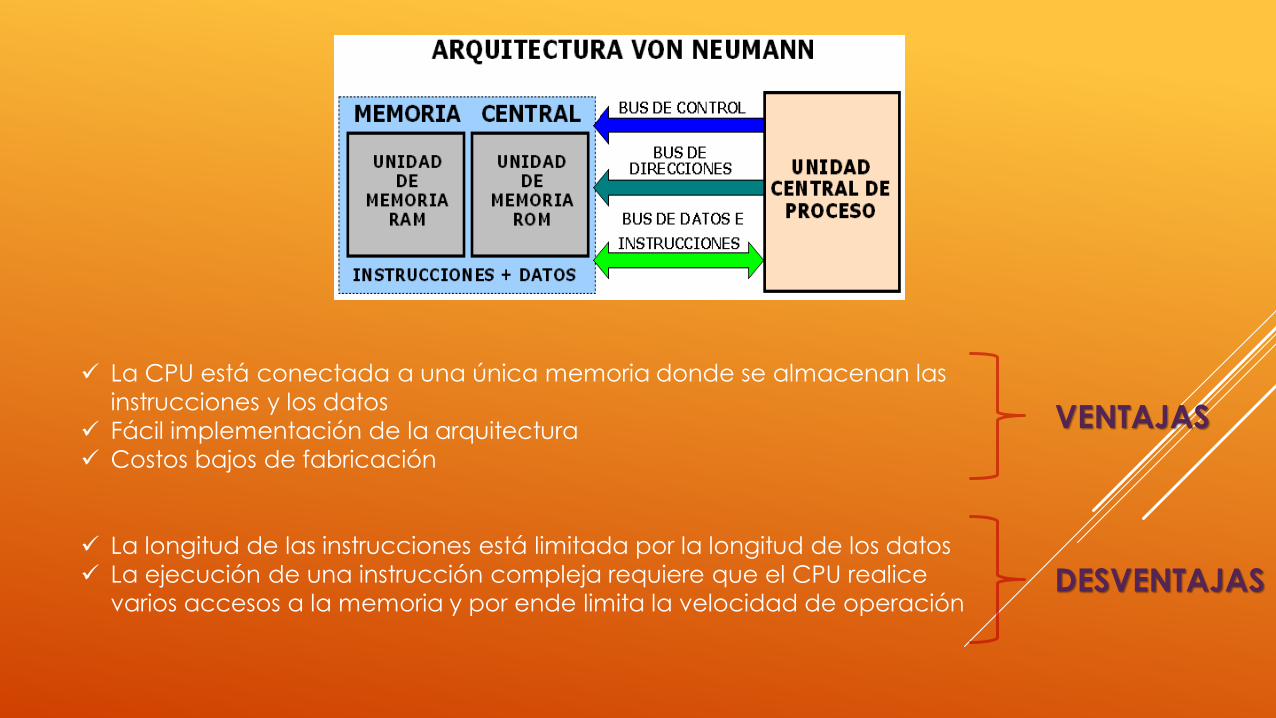
La CPU está conectada a una única memoria donde se almacenan las
instrucciones y los datos
Fácil implementación de la arquitectura
Costos bajos de fabricación
La longitud de las instrucciones está limitada por la longitud de los datos
La ejecución de una instrucción compleja requiere que el CPU realice
varios accesos a la memoria y por ende limita la velocidad de operación
VENTAJAS
DESVENTAJAS

Tiene dos memorias independientes, una memoria de programa (instrucciones) y
una memoria de datos, que permiten acceso independiente y simultáneo a
ambas memorias
Estos buses pueden ser de diferente tamaño (distinta longitud para la instrucción y
el dato)
Mayor velocidad de operación
Uso de la segmentación (pipeline), la CPU accesa a la memoria de datos para
completar una operación y al mismo tiempo accesa a la memoria de programa
para leer la siguiente instrucción a ejecutar
Mayor costo de implementación y fabricación
V
E
N
T
A
J
A
S
DESVENTAJA
CISC: COMPLEX INSTRUCTION SET COMPUTER
Se traduce como conjunto complejo de instrucciones para computadora
Son procesadores que tienen un juego de instrucciones muy sofisticadas y
poderosas.
Su repertorio de instrucciones es grande, generalmente mayor a 200 instrucciones
Requieren de varios ciclos de reloj para la ejecución de una instrucción
(decodificación y realización)
Tiene muchos modos de direccionamiento
RISC: REDUCED INSTRUCTION SET COMPUTER
Se traduce como conjunto reducido de instrucciones para computadora
Son procesadores que tienen un juego de instrucciones sencillas
Su repertorio de instrucciones es pequeño, generalmente menor a 200
instrucciones
Requieren de un ciclo de reloj para la ejecución de una instrucción en la mayoría
de los casos
Tiene pocos modos de direccionamiento
Aprovecha la segmentación

MICROCONTROLADOR PIC
PIC: Peripheral Interface Controller
Esta familia de microcontroladores es fabricada por la empresa Microchip Technology
Se diseño en un inicio como circuito auxiliar en el manejo de periféricos para otros
microprocesadores
Famlia PIC:
Gama Base
Gama Media
Gama Alta (mejorada)
GAMA BASE: Tiene una CPU de 12 bits
Consta de un repertorio de 33 instrucciones
Tiene una pila de 2 niveles
Memoria interna mínima (menos de 1KB)
Recursos internos básicos (puertos E/S)
GAMA MEDIA: Tiene una CPU de 14 bits
Consta de un repertorio de 35 instrucciones
Tiene una pila de 8 niveles
Memoria interna mayor de 1KB
Varios puertos E/S)
Temporizadores
Convertidor A/D
Comparadores analógicos
Un vector de interrupción
GAMA ALTA: Tiene una CPU de 16 bits
Consta de un repertorio de 77 instrucciones
Tiene una pila de 8 niveles
Memoria interna de hasta 128KB
Varios puertos E/S
Dos vectores de interrupción
Convertidor A/D
Comparadores analógicos
Varias interfaces de comunicación (usb, can, usart, I2C, etc.)

MICROCONTROLADOR PIC 16F84A:
Es un microcontrolador de gama media que consta de las siguientes características:
CPU de 8 bits
Memoria de programa de 1024 palabras
Memoria RAM de 68 bytes
Memoria EEPROM de 68 bytes
Los códigos de instrucciones son de 14 bits y los datos de 8 bits
Todas las instrucciones se ejecutan en un ciclo-máquina a excepción de las
instrucciones de salto que necesitan dos ciclos-máquina
Dos puertos E/S, uno de 5 bits (PORTA) y otro de 8 bits (PORTB), configurables
individualmente los pines
Tiene una pila de 8 niveles
Tiene tres modos de direccionamiento: Directo, Indirecto y Relativo
Contiene 16 registros de funciones especiales (SFR) y 68 registros de propósito
general (GPR)
Tiene cuatro fuentes de interrupción:
• Por pin externo RB0/INT
• Desbordamiento del temporizador TMR0
• Cambio de estado de PORTB<7:4>
• Escritura completa de la EEPROM
Temporizador/contador de 8 bits
10,000 ciclos de borrado para la memoria de programa (FLASH)
ICSP (In-Circuit Serial Programming)
Perro guardian con su propio oscilador RC
Protección de código
Modo SLEEP para ahorro de energía
Opciones de selección del tipo de oscilador a usar
Rango de operación en CD de 2 a 5.5 volts
Consumo menor a 2 mA con 5 V y 4 MHz
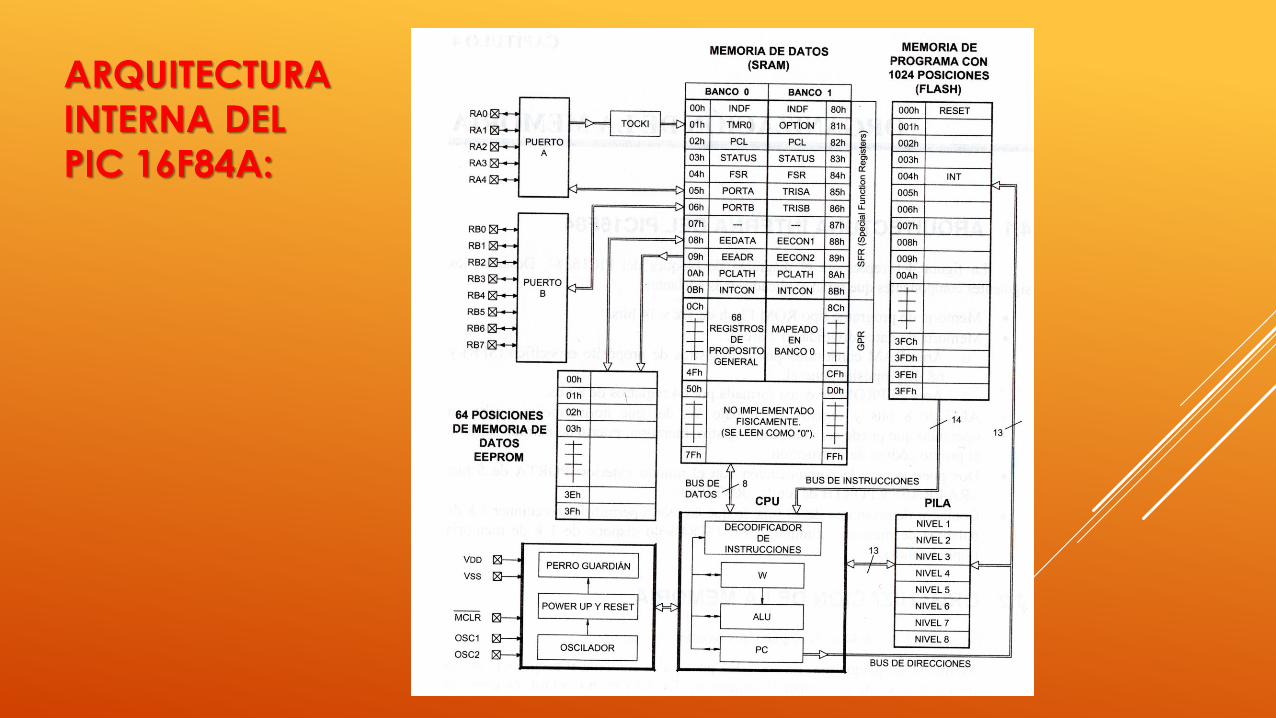
ARQUITECTURA
INTERNA DEL
PIC 16F84A:

PINES DEL MICROCONTROLADOR PIC 16F84A:
Pines 3-1,18-17: Pines E/S del puerto A, siendo RA4 el MSB
Pines 13-6: Pines E/S del puerto B, siendo RB7 el MSB
Pin 4: Master Clear: Pin que produce un RESET del µC
Pin 5: VSS: Terminal de referencia de tierra (GND)
Pin 14: VDD: Terminal para la alimentación del µC,
generalmente con 5 volts
Pines 15 y 16: OSC1 y OSC2: Conexión de un cristal o
resonador para generar la señal de reloj que requiere el µC.
Cuando se usa un circuito RC, la señal se conecta al pin 15
mientras que en el pin 16 se obtiene la misma señal del
circuito RC pero con una frecuencia igual a 1/4 de la
entrada
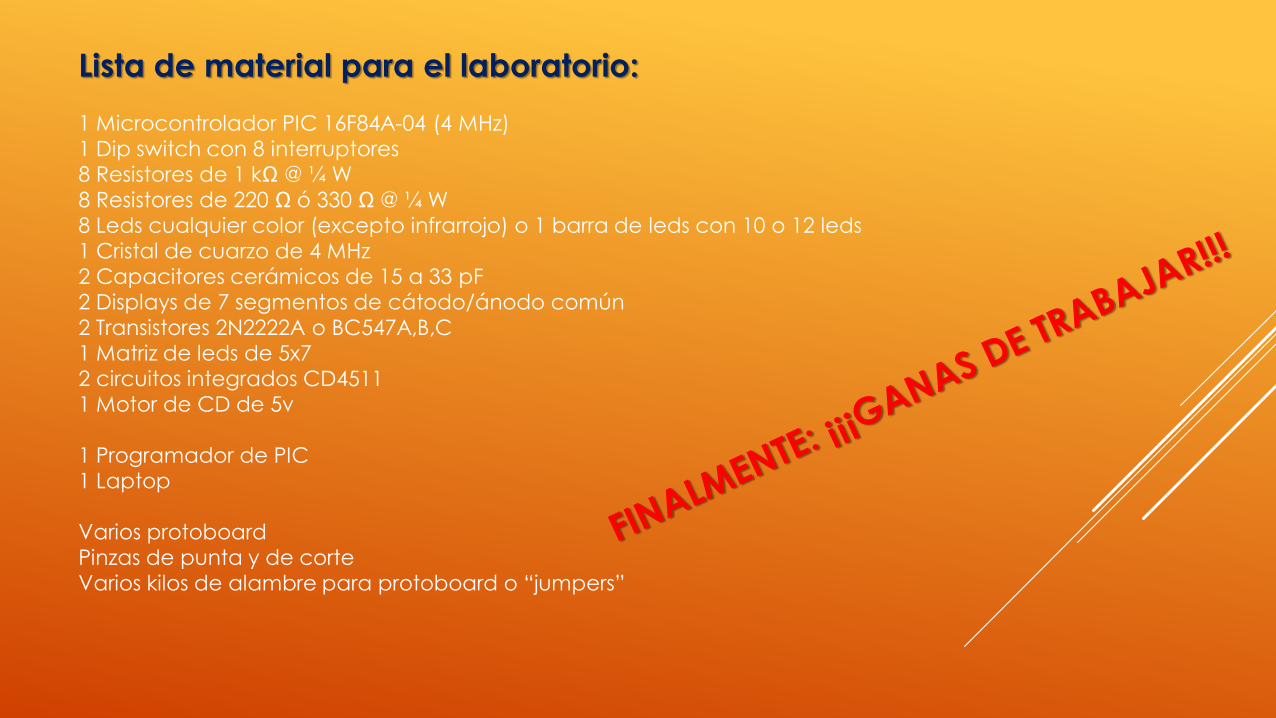
Lista de material para el laboratorio:
1 Microcontrolador PIC 16F84A-04 (4 MHz)
1 Dip switch con 8 interruptores
8 Resistores de 1 kΩ @ ¼ W
8 Resistores de 220 Ω ó 330 Ω @ ¼ W
8 Leds cualquier color (excepto infrarrojo) o 1 barra de leds con 10 o 12 leds
1 Cristal de cuarzo de 4 MHz
2 Capacitores cerámicos de 15 a 33 pF
2 Displays de 7 segmentos de cátodo/ánodo común
2 Transistores 2N2222A o BC547A,B,C
1 Matriz de leds de 5x7
2 circuitos integrados CD4511
1 Motor de CD de 5v
1 Programador de PIC
1 Laptop
Varios protoboard
Pinzas de punta y de corte
Varios kilos de alambre para protoboard o “jumpers”
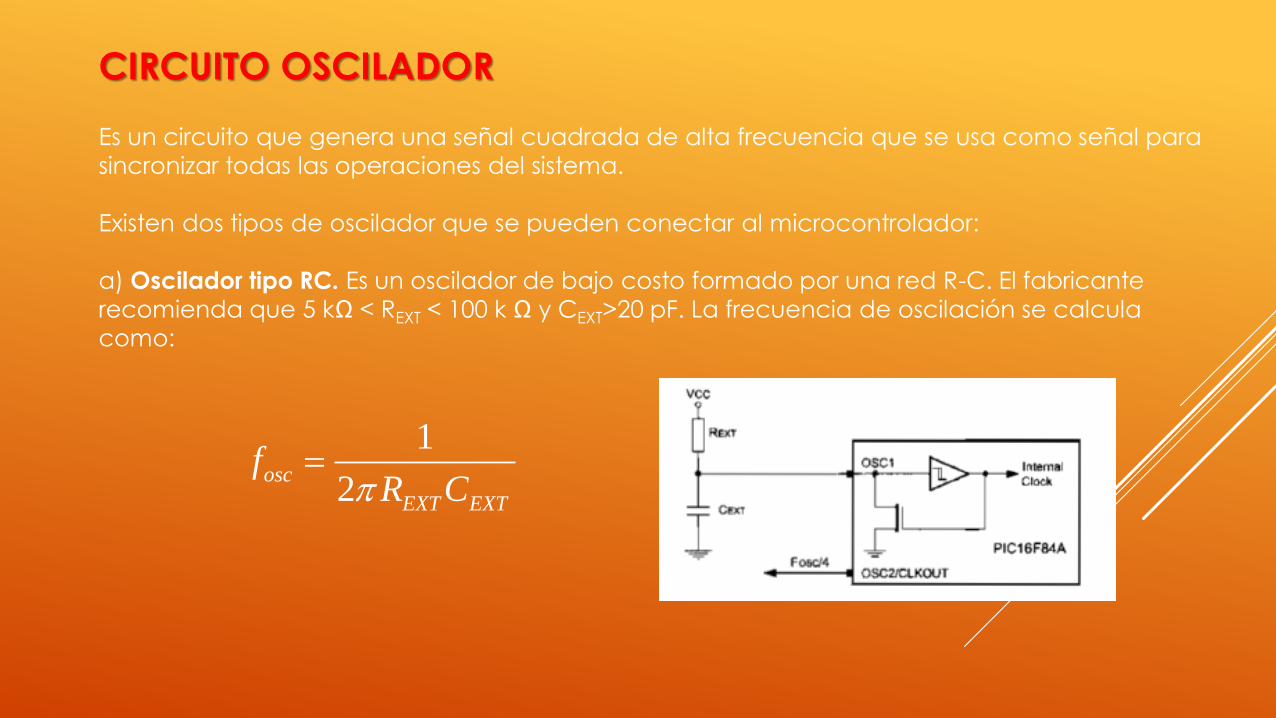
CIRCUITO OSCILADOR
Es un circuito que genera una señal cuadrada de alta frecuencia que se usa como señal para
sincronizar todas las operaciones del sistema.
Existen dos tipos de oscilador que se pueden conectar al microcontrolador:
a) Oscilador tipo RC. Es un oscilador de bajo costo formado por una red R-C. El fabricante
recomienda que 5 kΩ < REXT < 100 k Ω y CEXT>20 pF. La frecuencia de oscilación se calcula
como:
1
2osc
EXT EXT
fR C