multi-sensory augmentation for simulation-based training
TRANSCRIPT

Multi-sensory Augmentation for Simulation-Based Training in Robot-Assisted Surgery
Chiara Galli de Paratesi
December 15, 2020
Master Thesis in Biomedical Engineering
Supervisor Academic TutorsElena De Momi Andrea Mariani
Academic Year 2019-20
Guido Caccianiga

Nome Cognome, assoc.prof. ABC Dept.
Introduction
Robot-Assisted Minimally Invasive Surgery (RAMIS)
Chiara Galli de Paratesi 2
da Vinci Surgical System (Intuitive Surgical Inc.)
Need for practical skills training
Complexity of surgery as sensorimotor task
Need to deal with new control modalities
Mas
ter
sid
e
Pat
ien
tsi
de

Nome Cognome, assoc.prof. ABC Dept.
Introduction
Virtual Reality Simulation-Based Training
Training
in the Operating Room
High risk for patients.
Time consuming.
Requires significant human resources.
Does not provide a standardized
means of assessment.
Risk-free.
Versatile.
Possibility to extract performance
parameters.
Possibility to integrate with multi-
sensory augmentation modalities.
Chiara Galli de Paratesi
Training
in Virtual Reality simulation
3
dV Trainer (Mimic Technologies Inc.)

Nome Cognome, assoc.prof. ABC Dept.
Introduction
Training Augmentation
AUGMENTATION
Guidance:Assists through the idealmovement to be learnt
Feedback:Explicitly shows the
user’s error
Chiara Galli de Paratesi 4

Nome Cognome, assoc.prof. ABC Dept.
Introduction
Training Augmentation
AUGMENTATION
Chiara Galli de Paratesi
Vision AuditoryHaptic
• Hand-eye coordination• Context awareness• Depth perception
• Force learning• Manipulation• Tactile discrimination
• Time-related and repetitivemovements
5
[Zhu, 2020]

Nome Cognome, assoc.prof. ABC Dept.
State of the Art
Augmentation Modalities
OTH
ER F
IELD
SR
AM
IS
[Huang, 2006]
[Malpani, 2017] [Brown, 2017]
[Yoon, 2017] [Sigrist, 2015]
Chiara Galli de Paratesi
Vision AuditoryHaptic
6
No firm consensus on the most suited
sensory modality for surgical skills acquisition

Nome Cognome, assoc.prof. ABC Dept.
Research Objective
Subsequent combination of Augmented Guidance and Feedback delivered during the same training session.
1. Acquire procedural steps of the task 2. Refine movements through error-correction
AIM 1
Guidance and Feedback investigated in the sensory domains of visual, haptic and visuo-haptic.
Integration of a Virtual Reality task with augmentation modalities to optimize the acquisition of fundamental skills in robotic surgery.
" The subsequent combination of Guidance and Feedback leads to an optimization of motor learning. "
Hypothesis 1
" The sensory modality has an impact on the efficacy of the augmentation. "
Hypothesis 2
Chiara Galli de Paratesi
AIM 2
7

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
User Study Outline
3. Augmentations
1. Experimental setup
4. Acquisition Protocol
5. Performance Metrics
2. Virtual Reality Task
Chiara Galli de Paratesi 8

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
Experimental Setup
Hardware: Master console of
da Vinci Research Kit (dVRK)
Software: Assisted Tele-operation
with Augmented Reality (ATAR)
Chiara Galli de Paratesi 9
https://github.com/jhu-dvrk/sawIntuitiveResearchKit/wiki https://github.com/neemoh/ATAR/[Enayati, 2017]

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
Virtual Reality Task
Ring displacements are
used to generate the visual
and haptic feedback and to
evaluate the accuracy
performance
ENHANCED NEEDLE DRIVING
Chiara Galli de Paratesi
PICK-UP
PRE-ROTATION
INSERTION
TRANSFER
EXTRACTION
Hand-eye coordination
Steady hand
Accuracy
[Caccianiga, 2020]
10

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
Visual Augmentation: Guidance
Ghost gripper: for
position and orientation
during Pick-up and
Transfer
Reference frames: for
univocal Pre-rotation
Blu circle: for ideal
trajectory during
Insertion and Extraction
Chiara Galli de Paratesi 11

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
Visual Augmentation: Feedback
Chiara Galli de Paratesi
The color and number of
visual aids turned on
indicate the ring
displacement intensity
The position along the
visual aids crown
indicate the ring
displacement direction
[Caccianiga, 2020]
12
Nome Cognome, assoc.prof. ABC Dept.
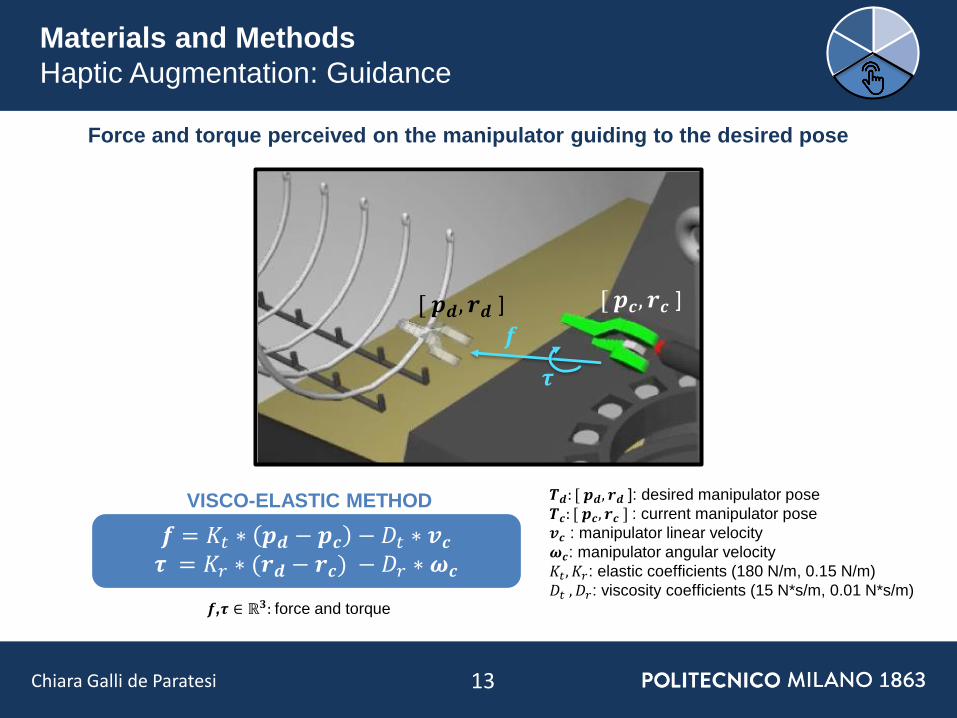
Force and torque perceived on the manipulator guiding to the desired pose
Materials and Methods
Haptic Augmentation: Guidance
𝑻𝒅: [ 𝒑𝒅, 𝒓𝒅 ]: desired manipulator pose
𝑻𝒄: [ 𝒑𝒄, 𝒓𝒄 ] : current manipulator pose
𝒗𝒄 : manipulator linear velocity
𝝎𝒄: manipulator angular velocity
𝐾𝑡, 𝐾𝑟: elastic coefficients (180 N/m, 0.15 N/m)
𝐷𝑡 , 𝐷𝑟: viscosity coefficients (15 N*s/m, 0.01 N*s/m)
VISCO-ELASTIC METHOD
𝒇 = 𝐾𝑡 ∗ 𝒑𝒅 − 𝒑𝒄 − 𝐷𝑡 ∗ 𝒗𝒄𝝉 = 𝐾𝑟 ∗ (𝒓𝒅 − 𝒓𝒄) − 𝐷𝑟 ∗ 𝝎𝒄
Chiara Galli de Paratesi 13
𝒇
𝝉
[ 𝒑𝒅, 𝒓𝒅 ]
𝒇,𝝉 ∈ ℝ𝟑: force and torque
[ 𝒑𝒄, 𝒓𝒄 ]

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
Haptic Augmentation: Feedback
𝒅𝒊: distance between equilibrium and current
pose of each ring
𝒗𝒄 : manipulator linear velocity
𝐾𝑡: elastic coefficient (360 N/m)
𝐷𝑡 : viscosity coefficient (40 N*s/m)
VISCO-ELASTIC METHOD
𝒇 =
𝒊=𝟏
𝟑
𝒅𝒊 ∗ 𝐾𝑡 − 𝐷𝑡 ∗ 𝒗𝒄
𝒅𝒊
𝒇 ∈ ℝ𝟑: force
Resistive force perceived on the manipulator resulting from ring displacement
Chiara Galli de Paratesi 14

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
Acquisition Protocol
32non-medical participants
4 groups
C : no augmentation
V : visual augmentation
H : haptic augmentation
VH : visual and haptic augmentation
cBASELINE cTRAINING cEVALUATION
c5 rep c c c5 rep10 rep
B ET1 T2
caugmented
guidancec
augmented
feedbackcno augmentation
PROTOCOL
cno augmentation
10 rep
Chiara Galli de Paratesi 15
rep = repetitions

Nome Cognome, assoc.prof. ABC Dept.
Materials and Methods
Performance Metrics
PHASE COMPLETION TIME
RING DISPLACEMENT
𝑇𝑢,𝑘 = 𝑁 ∗ 𝑓𝑠𝑎𝑚𝑝𝑙𝑒
𝑃 = total number of completed repetitions for the specific stage, for each group rep = number of stage repetitions𝑁𝑢𝑠𝑒𝑟𝑠 = number of users of each group
𝑀𝑢,𝑘 = σ𝑖=13 σ𝑛 𝑑𝑖(𝑛)
𝑑𝑖 = distance between equilibrium and current pose of each ringi = spans the number of ringsn = spans the number of time samplesu = specific userk = specific task repetition
N= total number of samples𝑓𝑠𝑎𝑚𝑝𝑙𝑒 = sampling frequency
u = specific userk = specific task repetition
𝑃% =𝑃
𝑟𝑒𝑝 ∗ 𝑁𝑢𝑠𝑒𝑟𝑠* 100
𝑑𝑖
Chiara Galli de Paratesi 16
Nome Cognome, assoc.prof. ABC Dept.
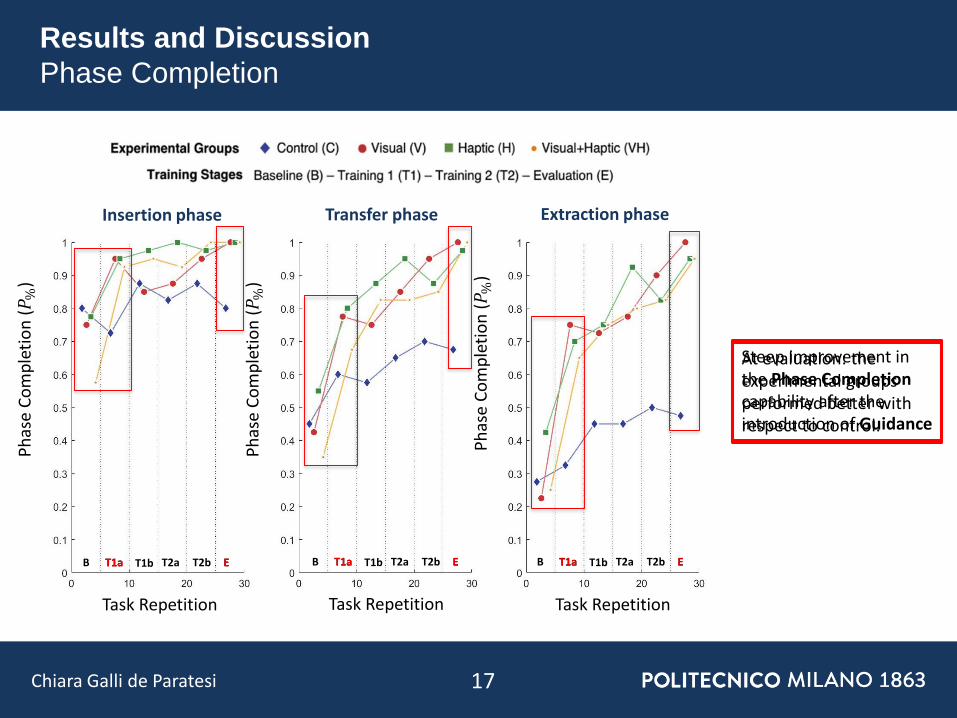
Results and Discussion
Phase Completion
Insertion phase Transfer phase Extraction phase
Ph
ase
Co
mp
leti
on
(𝑃%
)
Task Repetition
Ph
ase
Co
mp
leti
on
(𝑃%
)
Ph
ase
Co
mp
leti
on
(𝑃%
)
Task Repetition Task Repetition
B T1a T1b T2a T2b E B T1a T1b T2a T2b E B T1a T1b T2a T2b ET1a T1a T1aE E E
Chiara Galli de Paratesi
Steep improvement in the Phase Completioncapability after the introduction of Guidance
At evaluation: the experimental groups performed better with respect to control.
17

Nome Cognome, assoc.prof. ABC Dept.
Tim
e (s
)Results and Discussion
Time
Chiara Galli de Paratesi
Statistical analysis within group: Wilcoxonsigned-rank test. Statistical analysis betweengroups: Wilcoxon rank-sum test .
Only the VH group outperformedcontrol at evaluationVisual clues might involve highercognitive elaboration.
18
bas
elin
e
evaluation
p values

Nome Cognome, assoc.prof. ABC Dept.
Results and Discussion
Accuracy: Ring Displacement
Chiara Galli de Paratesi
Statistical analysis within group: Wilcoxonsigned-rank test. Statistical analysis betweengroups: Wilcoxon rank-sum test .
T1a
p C V H VH
C 0.023 <0.001 0.007 <0.001
V 0.879 0.008 0.328 0.038
H 0.505 0.442 0.008 0.798
VH 0.798 0.574 0.13 0.008
At evaluation: all experimental groups outperformed control.Almost no statistically significantdifferences between experimentalgroups.
Most relevant improvement: after the introduction of Augmented Guidance
19
bas
elin
e
evaluation
p values

Nome Cognome, assoc.prof. ABC Dept.
Conclusions
Chiara Galli de Paratesi
• The introduction of Guidance led to a steep increase in the Phase Completioncapability and in the Time-Accuracy of the task.
• The subsequent application of Feedback caused a further, but not comparable, improvement acriss all performance metrics.
The subsequent combination of Augmented Guidance and Feedback leads to an optimization of motor learning.
• The most relevant difference between sensory domains was related to Time: haptic clues might involve a faster processing of the information with respect to the visual ones.
The potentiality of the haptic augmentation in the acquisition of practical skills wasderived: it might involve a lower cognitive elaboration.
AIM 1
AIM 2
20

Nome Cognome, assoc.prof. ABC Dept.
Future Developments
Chiara Galli de Paratesi
Wider study population
Longer study protocol
More complex surgical tasks
Retention tests
Different combination of Guidance and Feedback
21

Nome Cognome, assoc.prof. ABC Dept.
Any question?
Thank you for your kind attention!
Chiara Galli de Paratesi
22
* Equally contributed to the work
C. Galli de Paratesi*, G. Caccianiga*, A. Mariani*, A. Menciassi, E. De Momi, "Multisensory Guidance and Feedback for Simulation-based Training in Robot-Assisted Surgery: a Preliminary Comparison of Visual, Haptic, and Visuo-Haptic. " Submitted to RA-L and ICRA 2021.

Nome Cognome, assoc.prof. ABC Dept. 23
Materials and Methods
Subjective Metrics
Chiara Galli de Paratesi
How much do you think the presence of the augmentation increased the workload of the task?
Perc
enta
geo
f re
spo
nse
s
Perc
enta
geo
f re
spo
nse
s
Perc
enta
geo
f re
spo
nse
s

Nome Cognome, assoc.prof. ABC Dept. 24
Materials and Methods
Subjective Metrics
Chiara Galli de Paratesi

Nome Cognome, assoc.prof. ABC Dept. 25
Materials and Methods
Trajectory Error Metric
Chiara Galli de Paratesi
Used to validate the Ring Displacement Metric (developed specifically for this task)
𝑇𝑘 =
𝑗=1
200
𝑛𝑜𝑟𝑚(𝑛𝑐𝑗 − 𝑛𝑑𝑗)
𝑇𝑘 ∶ Euclidean norm of distance between current and desired needle points duringInsertion, Transfer and Extraction
k = task repetitionj = spans the number of data points𝑛𝑐𝑗 = pose along the current needle mesh of point j
𝑛𝑑𝑗 = pose along the desired needle mesh of point j
Insertion Extraction:Transfer:
𝑐 = 0.3757 𝑐 = 0.8875 𝑐 = 0.7517
Positive correlation between the two metrics

Nome Cognome, assoc.prof. ABC Dept. 26
Materials and Methods
Time by phase: Insertion
Chiara Galli de Paratesi
bas
elin
e
evaluation
p values

Nome Cognome, assoc.prof. ABC Dept. 27
Materials and Methods
Time by phase: Transfer
Chiara Galli de Paratesi
bas
elin
e
evaluation
p values

Nome Cognome, assoc.prof. ABC Dept. 28
Materials and Methods
Time by phase: Extraction
Chiara Galli de Paratesi
bas
elin
e
evaluation
p values

Nome Cognome, assoc.prof. ABC Dept. 29
Materials and Methods
Ring Displacement by phase: Insertion
Chiara Galli de Paratesi
bas
elin
e
evaluation
p values

Nome Cognome, assoc.prof. ABC Dept. 30
Materials and Methods
Ring Displacement by phase: Transfer
Chiara Galli de Paratesi
bas
elin
e
evaluation
p values

Nome Cognome, assoc.prof. ABC Dept. 31
Materials and Methods
Ring Displacement by phase: Extraction
Chiara Galli de Paratesi
bas
elin
e
evaluation
p values