multilayer neural networks - university of minnesota
TRANSCRIPT
Multilayer Neural Networks
1
Introduction
• Goal: Classify objects by learning nonlinearity
– There are many problems for which lineardiscriminants are insufficient for minimum error
– In previous methods, the central difficulty was thechoice of the appropriate nonlinear functions
– A “brute” approach might be to select a complete basisset such as all polynomials; such a classifier wouldrequire too many parameters to be determined from alimited number of training samples
2
– There is no automatic method for determining thenonlinearities when no information is provided tothe classifier
– In using the multilayer Neural Networks, the formof the nonlinearity is learned from the training data
3
Feedforward Operation and Classification
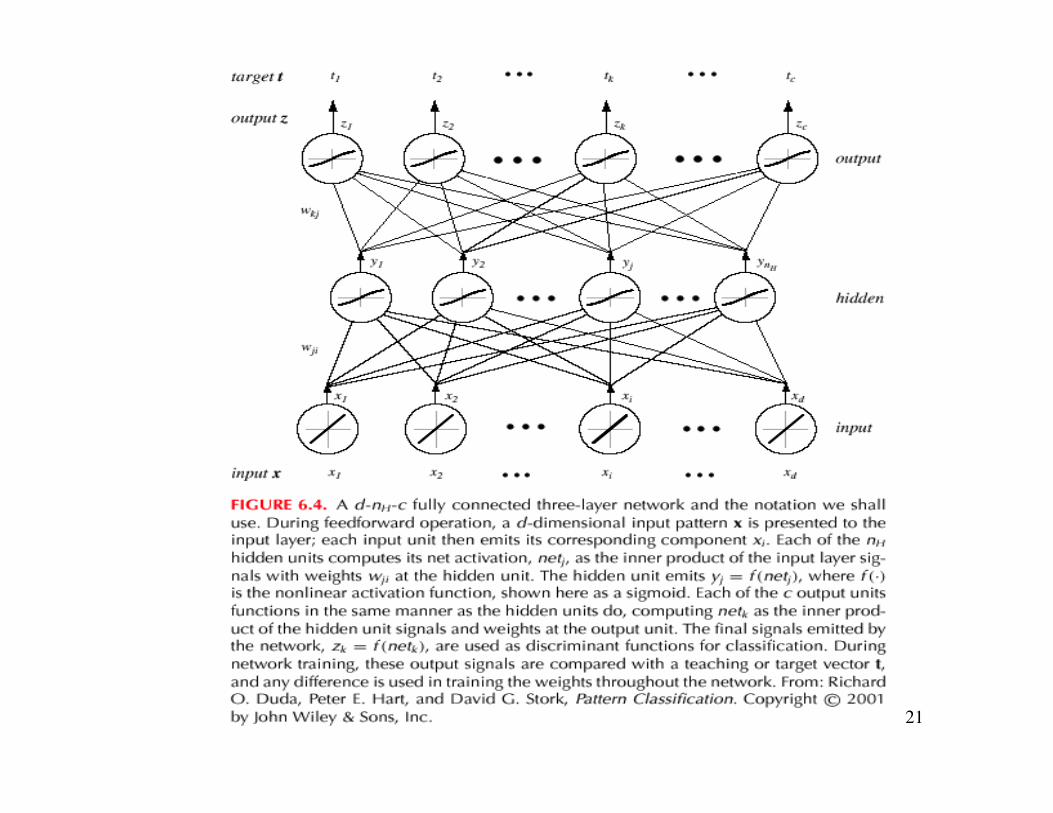
• A three-layer neural network consists of aninput layer, a hidden layer and an output layerinterconnected by modifiable weightsrepresented by links between layers
4
5
6
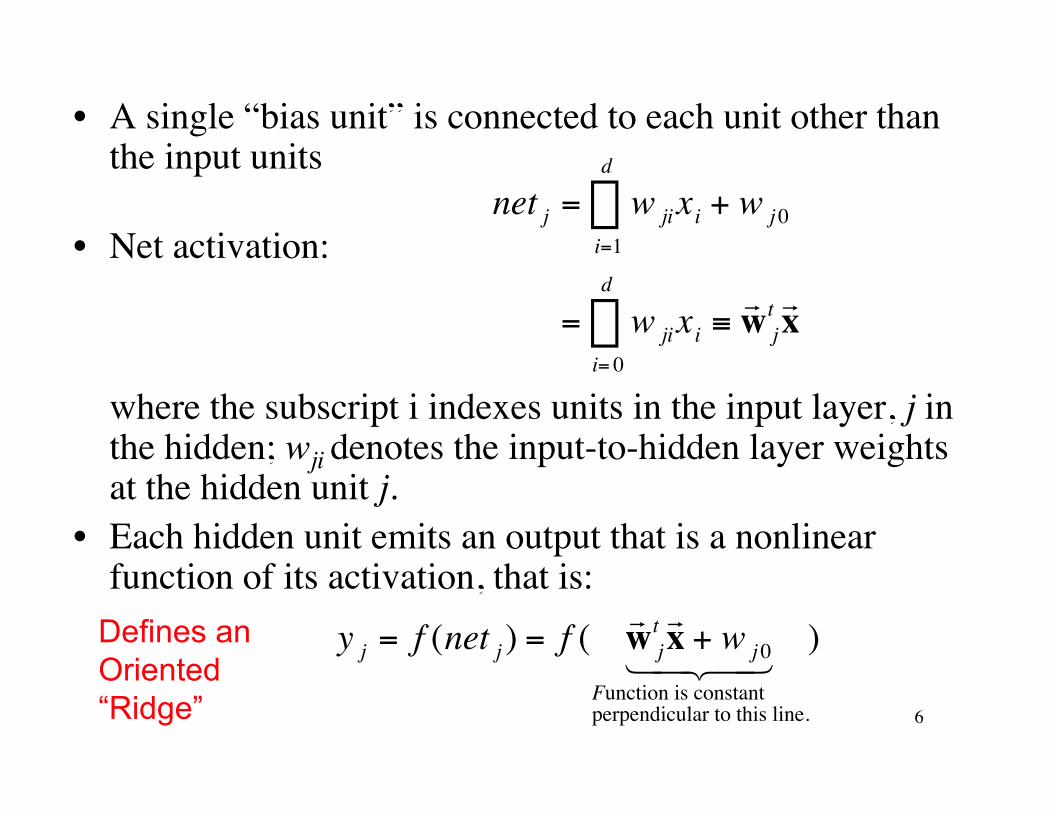
• A single “bias unit” is connected to each unit other thanthe input units
• Net activation:
where the subscript i indexes units in the input layer, j inthe hidden; wji denotes the input-to-hidden layer weightsat the hidden unit j.
• Each hidden unit emits an output that is a nonlinearfunction of its activation, that is:
†
net j = w jixi + w j 0i=1
d
Â
= w jixi ≡r w jt
r x i= 0
d
Â
†
y j = f (net j ) = f ( r w jtr x + w j 0
Function is constantperpendicular to this line.
1 2 4 3 4 )Defines an
Oriented “Ridge”
7
8
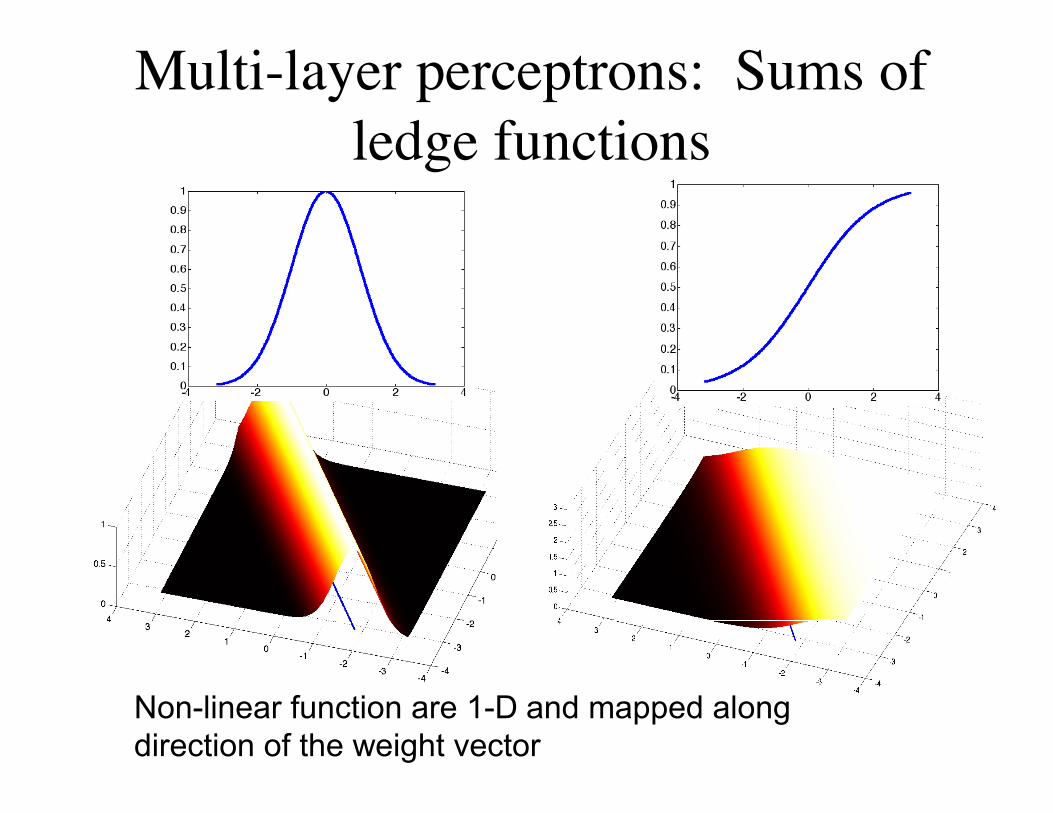
Multi-layer perceptrons: Sums ofledge functions
Non-linear function are 1-D and mapped alongdirection of the weight vector
9
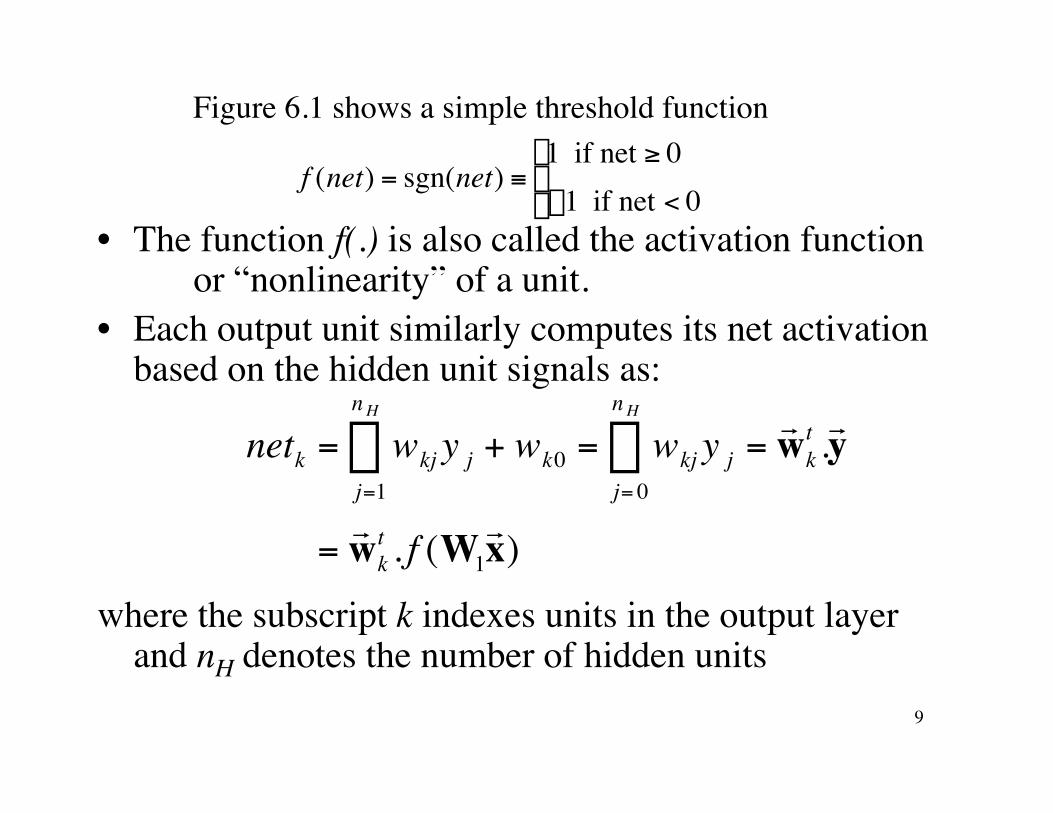
Figure 6.1 shows a simple threshold function
• The function f(.) is also called the activation functionor “nonlinearity” of a unit.
• Each output unit similarly computes its net activationbased on the hidden unit signals as:
where the subscript k indexes units in the output layerand nH denotes the number of hidden units
†
f (net) = sgn(net) ≡1 if net ≥ 0-1 if net < 0
Ï Ì Ó
†
netk = wkj y j + wk0 = wkj y j =r w kt .r y
j= 0
n H
Âj=1
n H
Â
=r w kt . f (W1
r x )
10
• More than one output are referred zk. An output unitcomputes the nonlinear function of its net, emitting
zk = f(netk)
• In the case of c outputs (classes), we can view thenetwork as computing c discriminants functionszk = gk(x) and classify the input x according to the largestdiscriminant function gk(x) " k = 1, …, c
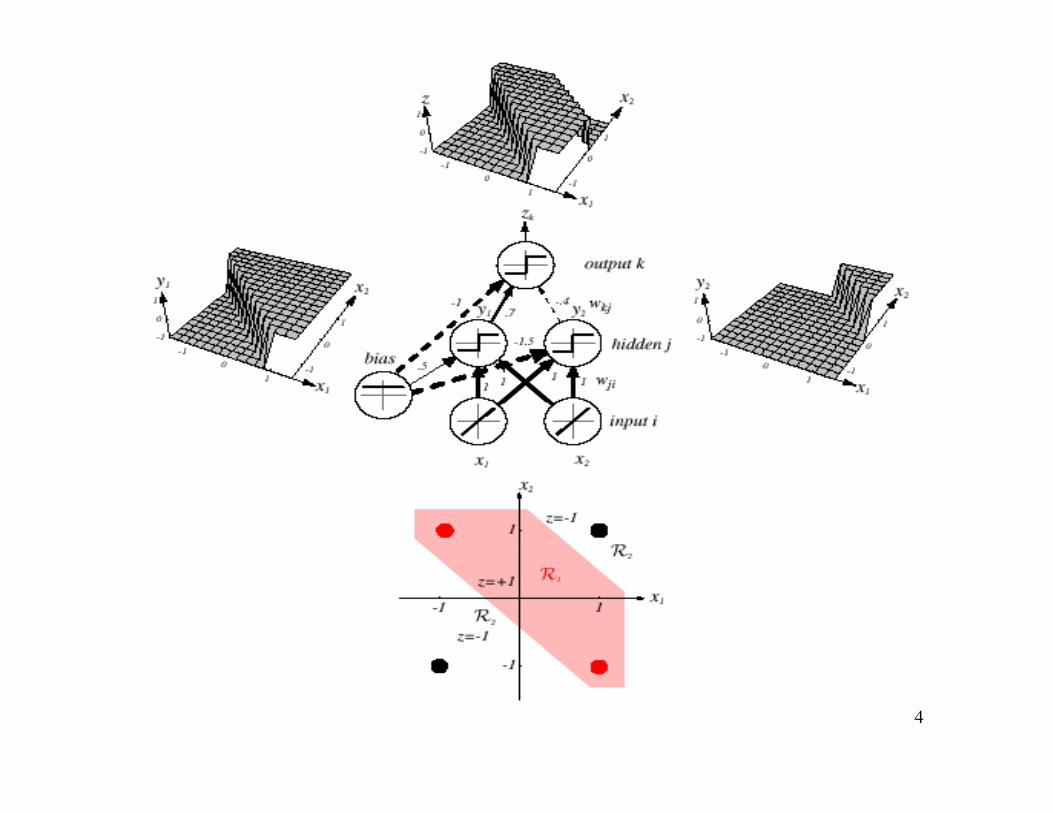
• The three-layer network with the weights listed infig. 6.1 solves the XOR problem
11
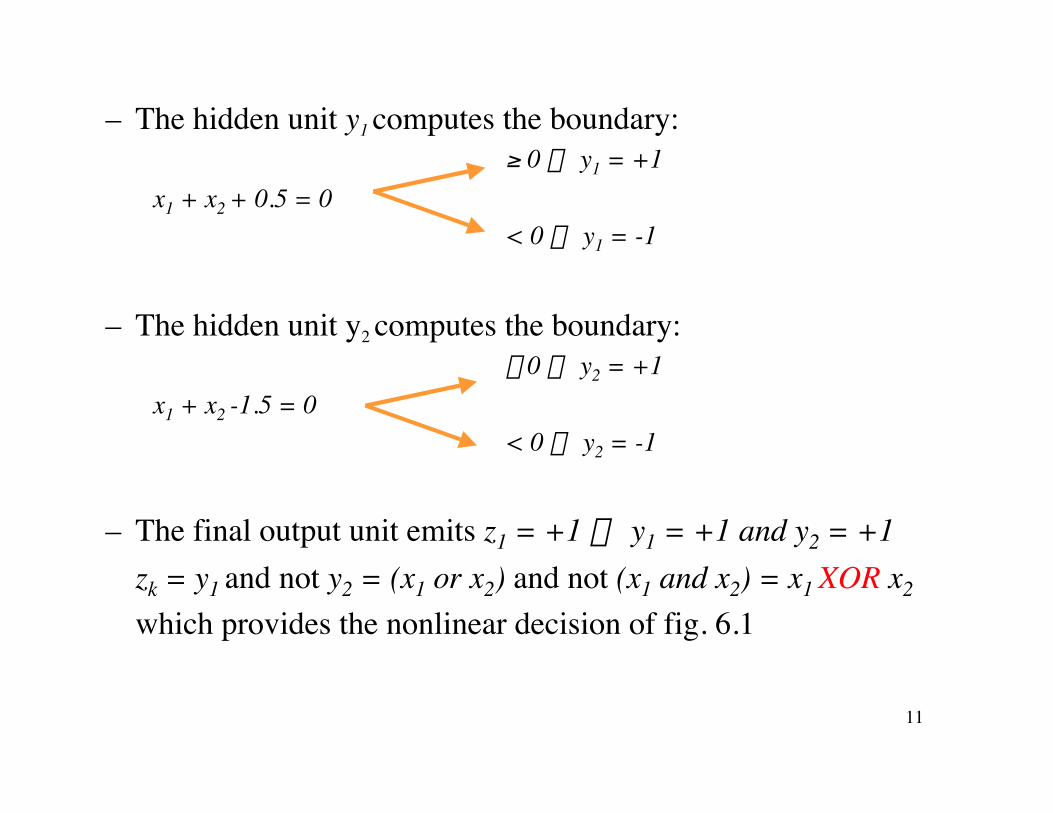
– The hidden unit y1 computes the boundary: ≥ 0 fi y1 = +1
x1 + x2 + 0.5 = 0 < 0 fi y1 = -1
– The hidden unit y2 computes the boundary: £ 0 fi y2 = +1
x1 + x2 -1.5 = 0 < 0 fi y2 = -1
– The final output unit emits z1 = +1 ¤ y1 = +1 and y2 = +1zk = y1 and not y2 = (x1 or x2) and not (x1 and x2) = x1 XOR x2
which provides the nonlinear decision of fig. 6.1
12
• General Feedforward Operation – case of c output units
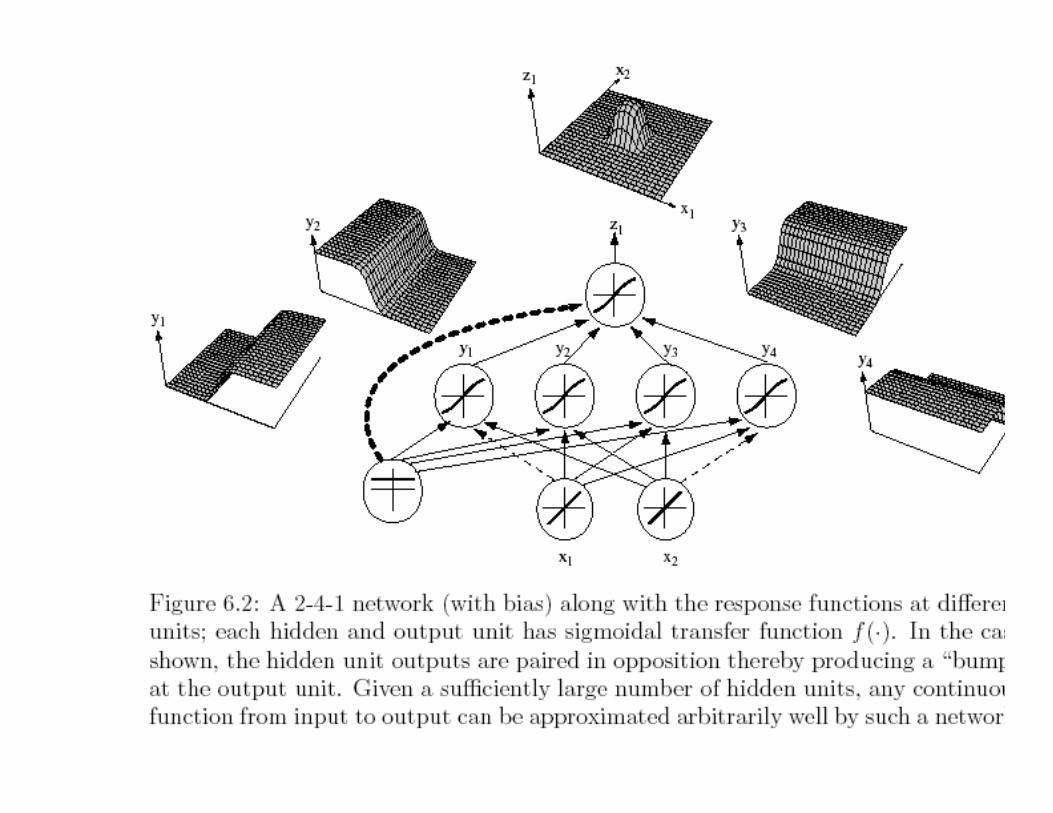
– Hidden units enable us to express more complicated nonlinearfunctions and thus extend the classification
– The activation function does not have to be a sign function, it isoften required to be continuous and differentiable
– We can allow the activation in the output layer to be differentfrom the activation function in the hidden layer or havedifferent activation for each individual unit
– We assume for now that all activation functions to be identical
†
gk(x) ≡ zk = f wkj f w jixi + w j 0i=1
d
ÂÊ
Ë Á
ˆ
¯ ˜ + wk 0
j=1
n H
ÂÊ
Ë Á Á
ˆ
¯ ˜ ˜ (1)
(k =1,...,c)
13
• Expressive Power of multi-layer Networks
Q: Can every decision be implemented by a three-layernetwork described by equation (1) ?
A: Yes (A. Kolmogorov)“Any continuous function from input to output can beimplemented in a three-layer net, given sufficient numberof hidden units nH, proper nonlinearities, and weights.”
for properly chosen functionsWe can always scale the input region of interest to lie in a hypercube, and thusthis condition on the feature space is not limiting.†
g(x) = X j y ij (xi)i=1:NÂ
Ê
Ë Á
ˆ
¯ ˜
j=1
2n +1
 "x Œ In (I = [0,1];n ≥ 2)
†
X j and yij
14
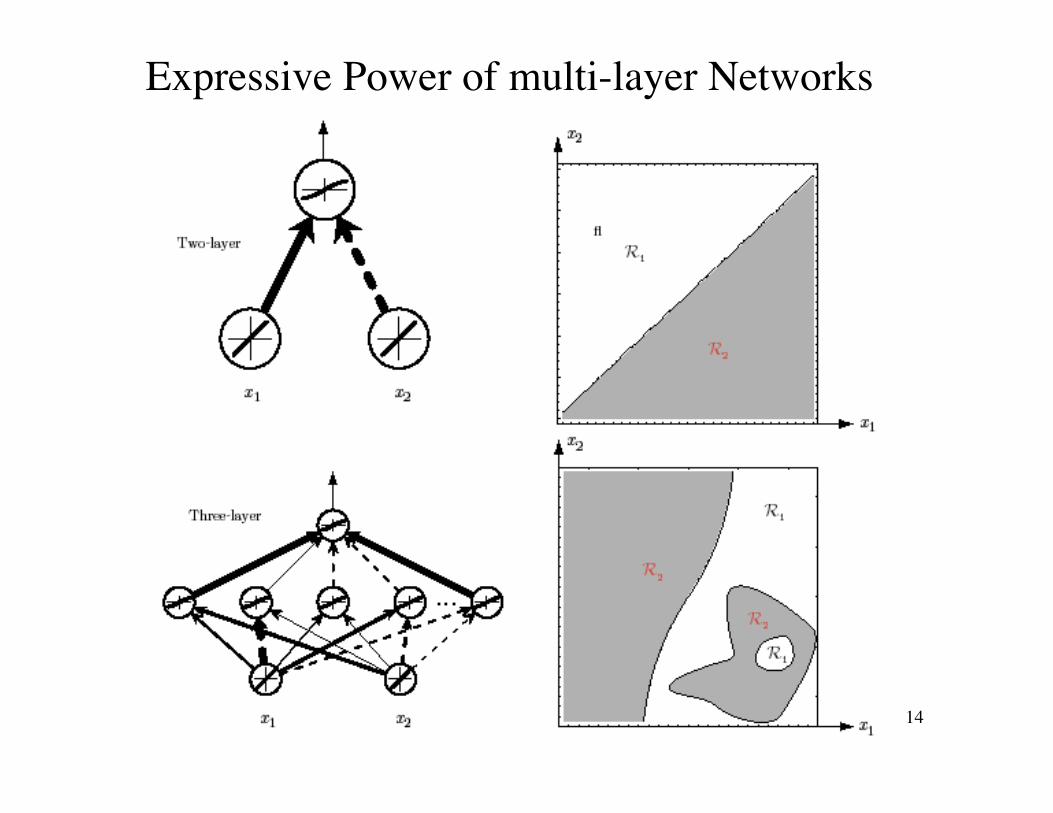
Expressive Power of multi-layer Networks
15
• Each of the 2n+1 hidden units takes as input asum of N nonlinear functions, one for each inputfeature xi
Unfortunately: Kolmogorov’s theorem tells usvery little about how to find the nonlinearfunctions based on data; this is the centralproblem in network-based pattern recognition.
Moreover, any specific network structure specializesthe above formulation, and hence most networksmust be viewed as approximating the targetfunction
†
X j
16
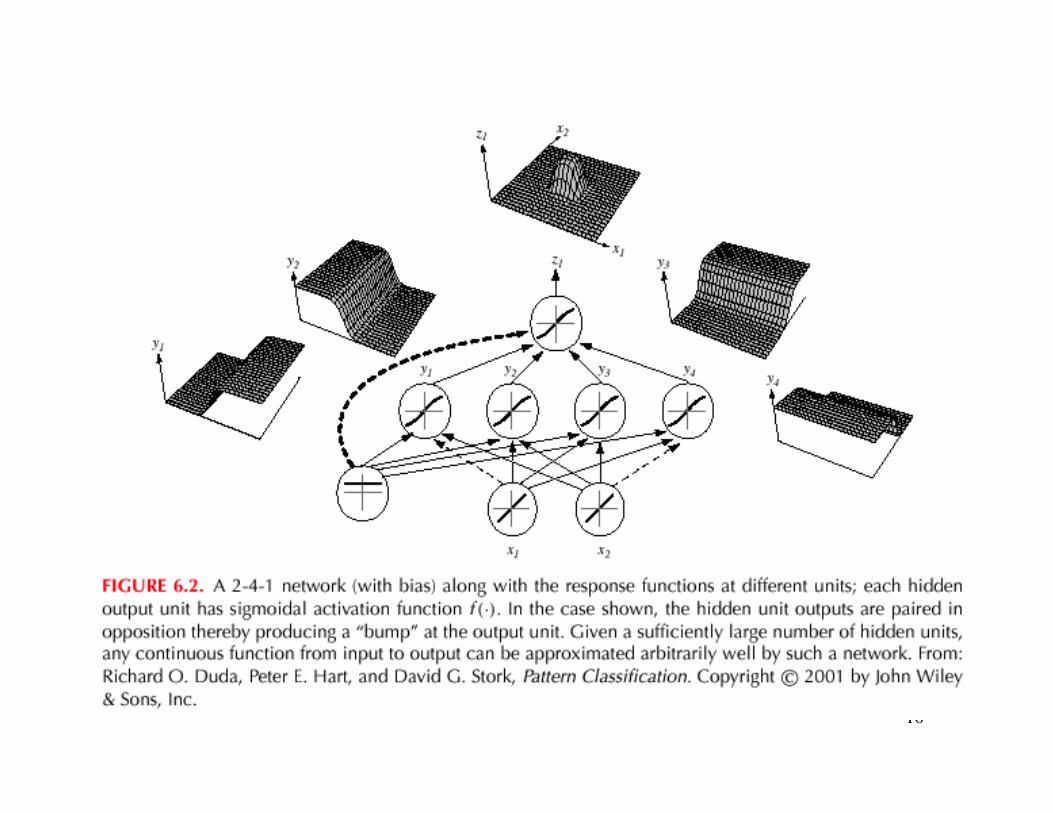
17
Backpropagation Algorithm
• Any function from input to output can beapproximated as a three-layer neuralnetwork
• How do we learn the approximation?

18
19
• Our goal now is to set the interconnexion weightsbased on the training patterns and the desired outputs
• In a three-layer network, it is a straightforward matterto understand how the output, and thus the error,depend on the hidden-to-output layer weights
• The power of backpropagation is that it enables us tocompute an effective error for each hidden unit, andthus derive a learning rule for the input-to-hiddenweights, this is known as:
The credit assignment problem
20
• Network have two modes of operation:
– FeedforwardThe feedforward operations consists of presenting apattern to the input units and passing (or feeding) thesignals through the network in order to get outputs units(no cycles!)
– LearningThe supervised learning consists of presenting an inputpattern and modifying the network parameters (weights) toreduce distances between the computed output and thedesired output
21
22
• Network Learning– Let tk be the k-th target (or desired) output and zk be the k-
th computed output with k = 1, …, c and w represents all the weights of the network
– The training error:
– The backpropagation learning rule is based on gradientdescent
• The weights are initialized with pseudo-random values and arechanged in a direction that will reduce the error:†
J(w) =12
(tk - zk )2 =12
t - z 2
k=1
c
Â
†
Dw = -h∂J∂w
†
gk(x) ≡ zk = f wkj f w jixi + w j 0i=1
d
ÂÊ
Ë Á
ˆ
¯ ˜ + wk 0
j=1
n H
ÂÊ
Ë Á Á
ˆ
¯ ˜ ˜ (1)
(k =1,...,c)
23
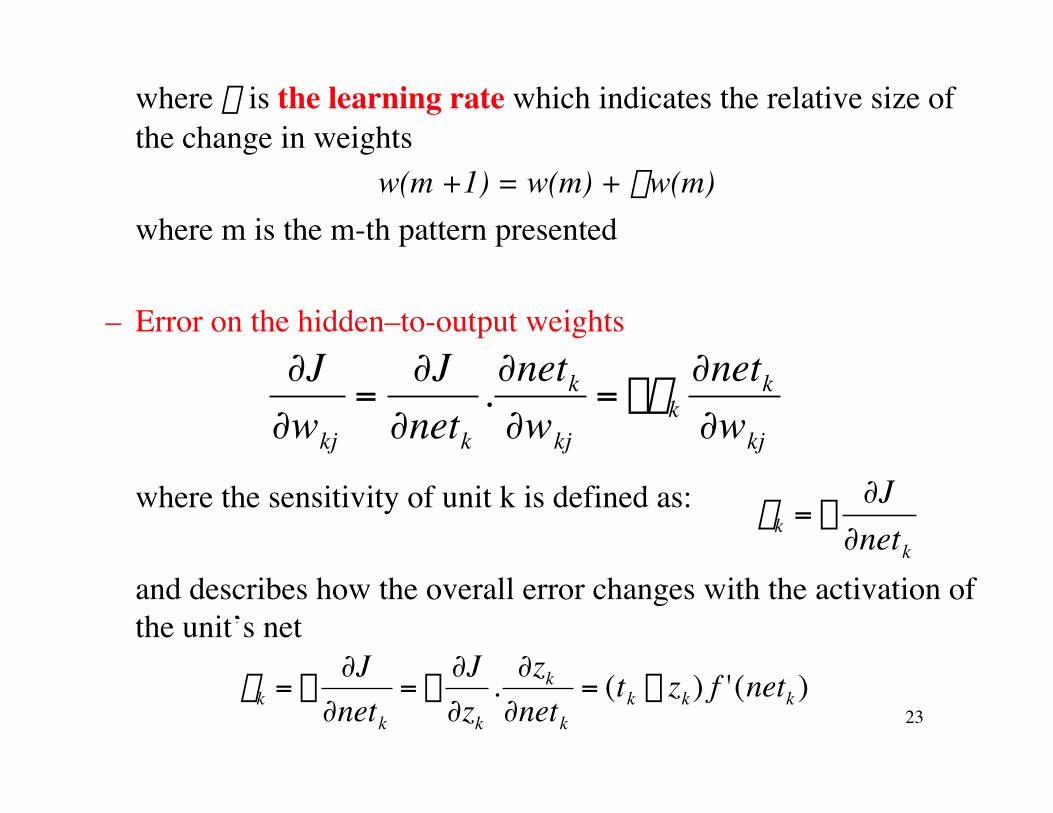
where h is the learning rate which indicates the relative size ofthe change in weights
w(m +1) = w(m) + Dw(m)where m is the m-th pattern presented
– Error on the hidden–to-output weights
where the sensitivity of unit k is defined as:
and describes how the overall error changes with the activation ofthe unit’s net†
∂J∂wkj
=∂J
∂netk
.∂netk
∂wkj
= -dk∂netk
∂wkj
†
dk = -∂J
∂netk
†
dk = -∂J
∂netk
= -∂J∂zk
. ∂zk
∂netk
= (tk - zk) f '(netk )
24
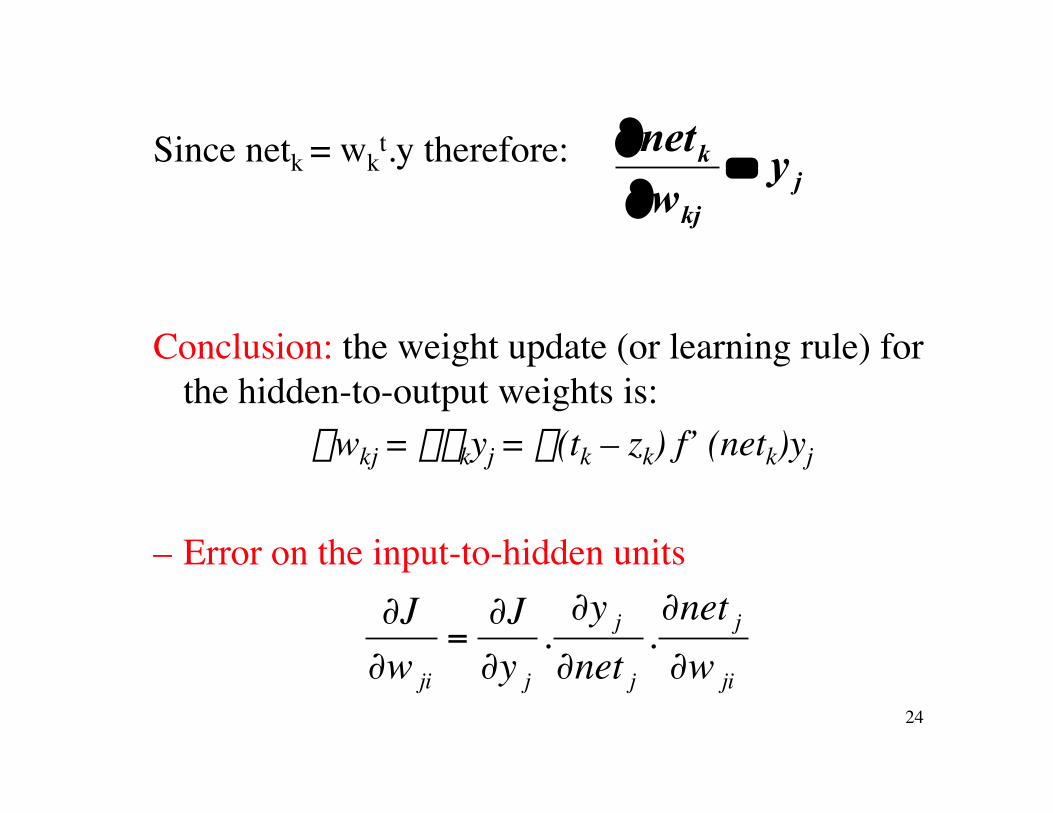
Since netk = wkt.y therefore:
Conclusion: the weight update (or learning rule) forthe hidden-to-output weights is:
Dwkj = hdkyj = h(tk – zk) f’ (netk)yj
– Error on the input-to-hidden units
jkj
k yw
net=
∂
∂
†
∂J∂w ji
=∂J∂y j
.∂y j
∂net j
.∂net j
∂w ji
25
However,
Similarly as in the preceding case, we define the sensitivity for ahidden unit:
which means that:“The sensitivity at a hidden unit is simply thesum of the individual sensitivities at the output units weightedby the hidden-to-output weights wkj; all multipled by f’(netj)”
Conclusion: The learning rule for the input-to-hidden weights is:
 Â
ÂÂ
= =
==
--=∂
∂
∂
∂--=
∂
∂--=˙
˚
˘ÍÎ
È-
∂
∂=
∂
∂
c
1k
c
1kkjkkk
j
k
k
kkk
c
1k j
kkk
2k
c
1kk
jj
w)net('f)zt(y
net.
net
z)zt(
y
z)zt()zt(
21
yyJ
Â=
≡c
1kkkjjj w)net('f dd
[ ] ijkkjjiji x)net('f wxw
j
444 3444 21d
dShdhD ==
26
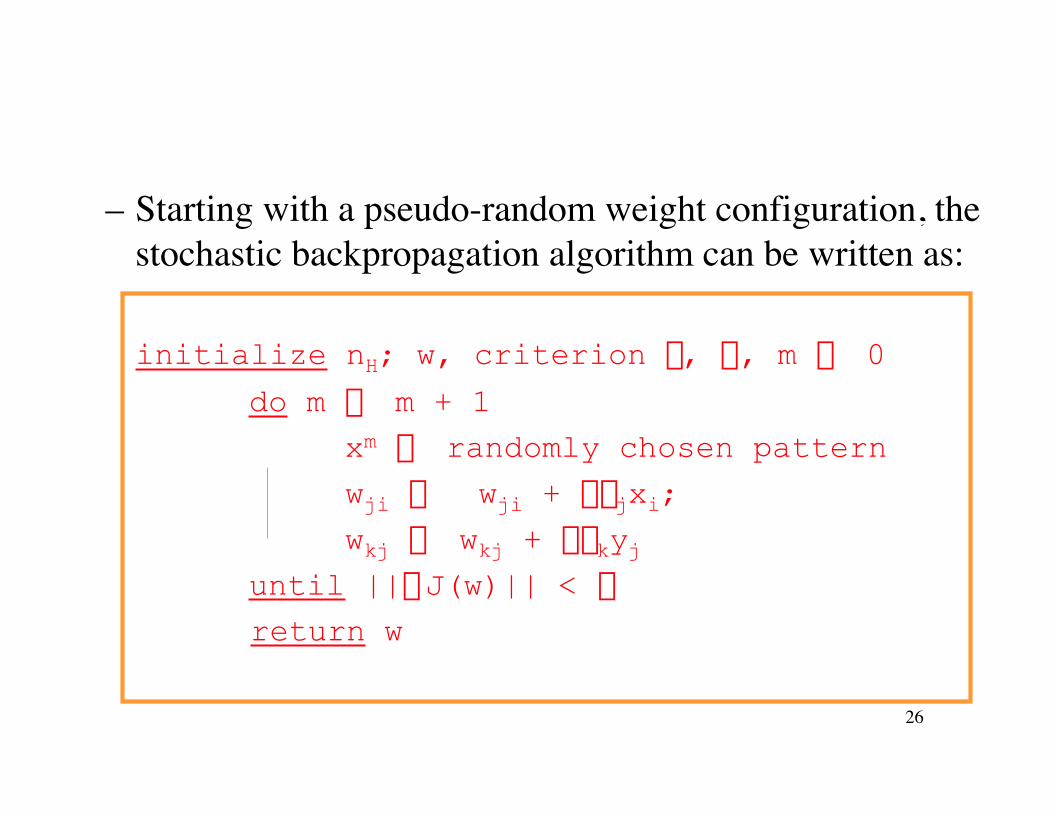
– Starting with a pseudo-random weight configuration, thestochastic backpropagation algorithm can be written as:
initialize nH; w, criterion q, h, m ¨ 0
do m ¨ m + 1
xm ¨ randomly chosen pattern
wji ¨ wji + hdjxi;
wkj ¨ wkj + hdkyjuntil ||—J(w)|| < q
return w
28
– Stopping criterion
• The algorithm terminates when the change in the criterion functionJ(w) is smaller than some preset value q
• There are other stopping criteria that lead to better performance thanthis one
• So far, we have considered the error on a single pattern, but we want toconsider an error defined over the entirety of patterns in the training set
• The total training error is the sum over the errors of n individualpatterns
†
J = Jpp=1
n
 (1)
29
– Stopping criterion (cont.)
• A weight update may reduce the error on the singlepattern being presented but can increase the error on thefull training set
• However, given a large number of such individualupdates, the total error of equation (1) decreases
30
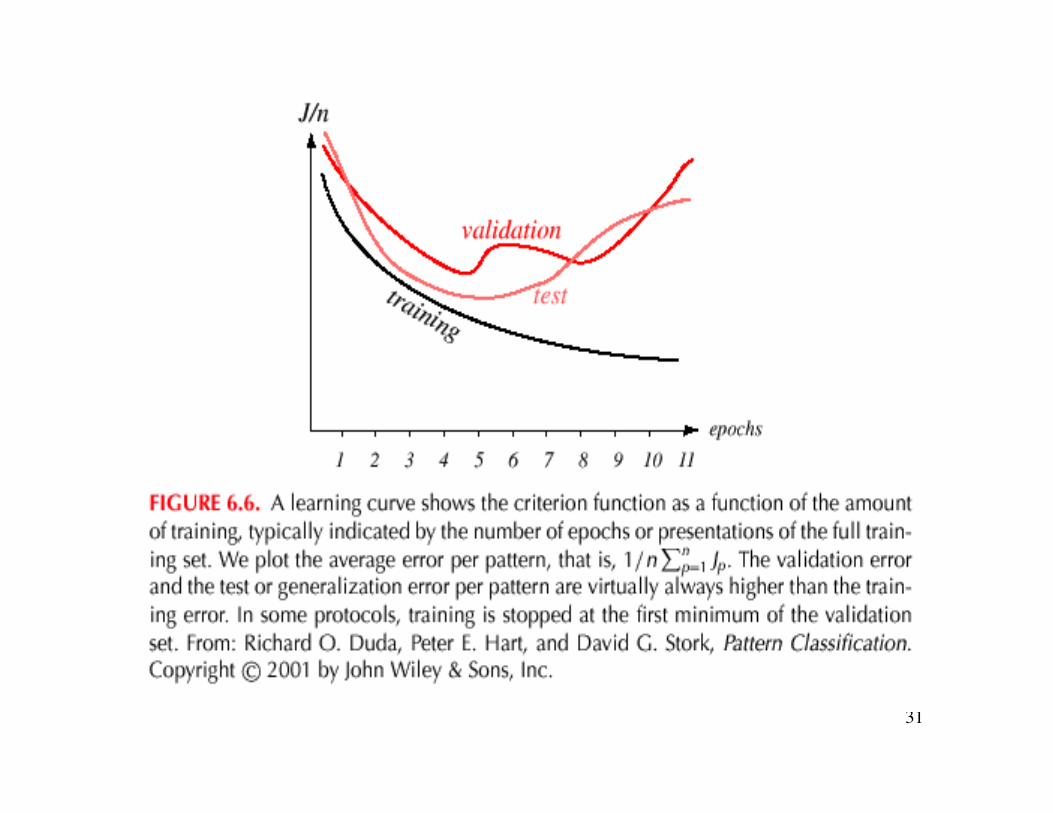
• Learning Curves– Before training starts, the error on the training set is high;
through the learning process, the error becomes smaller
– The error per pattern depends on the amount of training dataand the expressive power (such as the number of weights) inthe network
– The average error on an independent test set is always higherthan on the training set, and it can decrease as well asincrease
– A validation set is used in order to decide when to stoptraining ; we do not want to overfit the network and decreasethe power of the classifier generalization“we stop training at a minimum of the error on the validationset”
31