nonlinear observer design for dynamic positioning, control...
TRANSCRIPT
Nonlinear Observer Design for Dynamic Positioning
Jeroen Snijders, Jacob van der WoudeDelft University of Technology
Jaap-Harm WesthuisGusto BV
Control Systems I
Return to Session Directory
12/22/2005 2/25
Contents
• Introduction• Mathematical model • Observer design• Simulations• Results• Conclusions• Further research
12/22/2005 3/25
Introduction
• Total vessel motion superposition of low frequency (LF) vessel motions and wave frequency (WF) motions
• For station keeping only LF motions should be used to prevent unnecessary actuator use
• Separation of LF and WF motions: Wave filtering
12/22/2005 4/25
Introduction
• First use of Kalman filtering in 1970’s– Drawbacks: Necessity of linearization yielding lack of
guaranteed global stability and time consuming tuning• Examination of the possibilities of nonlinear observer
design from 1990’s– Globally stable, optimality not yet considered
12/22/2005 5/25
Introduction
• Objectives of this project– Providing a theoretical basis for nonlinear optimal observer
design– Presentation of new nonlinear suboptimal observer– Comparison of the new observer with an existing observer
12/22/2005 6/25
Mathematical model
• LF displacement due to both actuator forces and slowly-varying wind, wave and current forces
• WF motions approximated by a second-order linear model
• The total vessel displacement is considered to be a superposition of LF and WF induced displacement
• Only position and heading measurements are available
12/22/2005 7/25
Mathematical model
• These assumptions lead to the following mathematical representation of the system
vCxyEwBuxxAx
+=++= )(&
12/22/2005 8/25
Observer design
• General nonlinear system
• with performance indicator
Objective: Find an estimate minimizing J and obeying the system dynamics and measurements
),(),,(
vxgytwxfx
==&
∫+=t
t
dwxLttxtwxJ0
),,()),((),,( 00 ττφ
x̂
12/22/2005 9/25
Observer design
• Equivalent derivation as for the Hamilton-Jacobi-Bellman equation in optimal control leads to the equation for the nonlinear optimal observer
where• Drawback: Exact solution to the HJB equation not known
for most problems• Here suboptimal solution using a state-dependent Riccati
equation (SDRE) approach
),,,(min **
tJwxHt
Jxw
=∂∂
−
fLtwxH Tλλ +−=),,,(
12/22/2005 10/25
Observer design
• Why an SDRE approach?– Ease of implementation and applicability for online
use– Form of the considered problem– Promising results in other areas of research
• Drawback: Global stability can not be guaranteed
12/22/2005 11/25
Observer design
• Basic principles SDRE• Rewrite
asvxgyEwxfx
+=+=
)()(&
vxxCyEwxxAx
+=+=
)()(&
12/22/2005 12/25
Observer design
• Solve the state-dependent Riccati equation
with Q and R weighting matrices• Compute the gain matrix as for the Kalman filter
• The observer now has the form
0)()()()()()()()( 1 =+−+ − TTT EQExPxCRxCxPxPxAxAxP
)ˆ)(ˆ(ˆ)ˆ(ˆ xCyxKxxAx −+=&
1)()()( −= RxCxPxK T

12/22/2005 13/25
Observer design
• Comparison with existing observer• The observer is proven to be globally stable• The chosen configuration is as in [1]
12/22/2005 14/25
Simulations
• Considered ship is supply vessel, length 80 m• JONSWAP spectrum with Hs = 5m, Tp = 12s and
= 3.3• WF motions and LF forces are generated separately• LF motions due to LF forces and control input• Measurements superposition of LF and WF motions• Estimate of LF position used for controller feedback to PID
controller
γ
12/22/2005 15/25
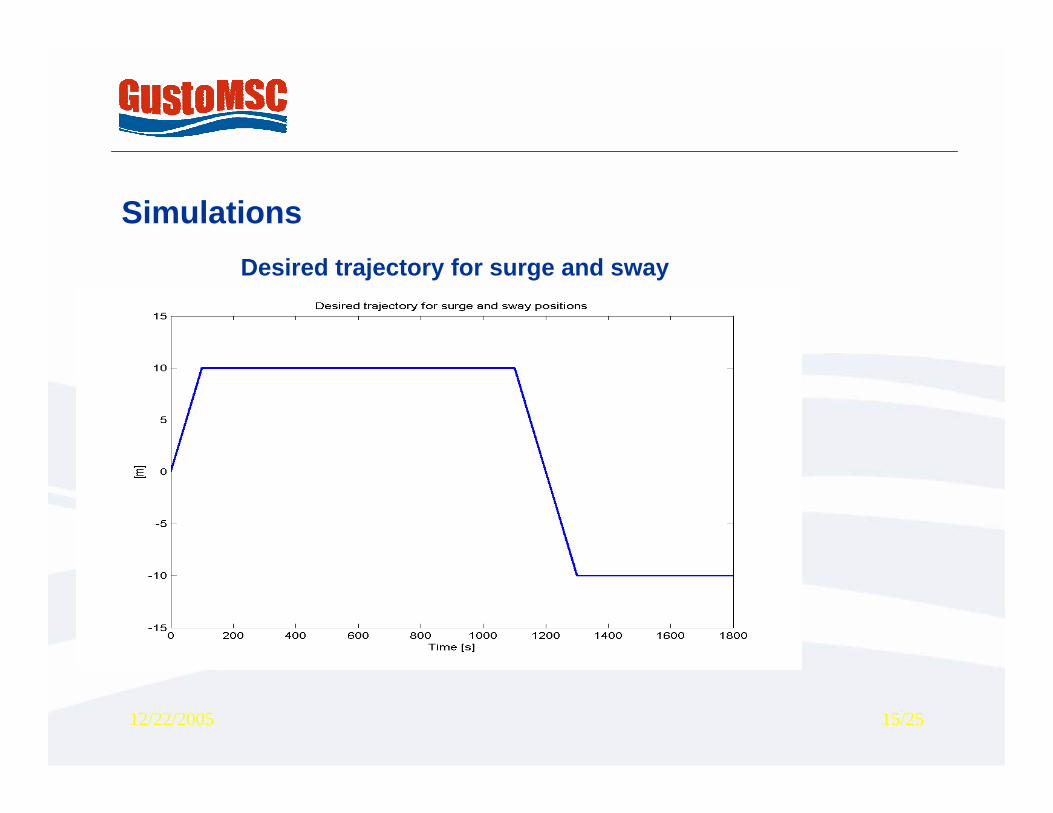
SimulationsDesired trajectory for surge and sway

12/22/2005 16/25
SimulationsDesired heading
12/22/2005 17/25
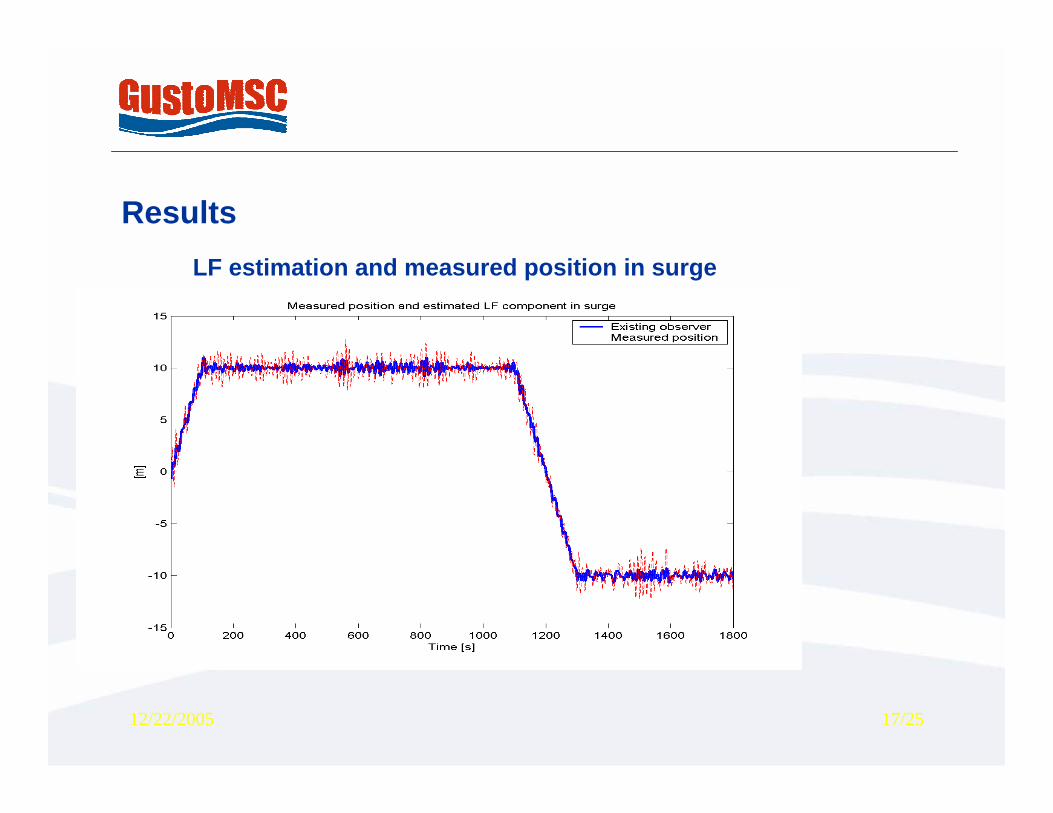
ResultsLF estimation and measured position in surge
12/22/2005 18/25
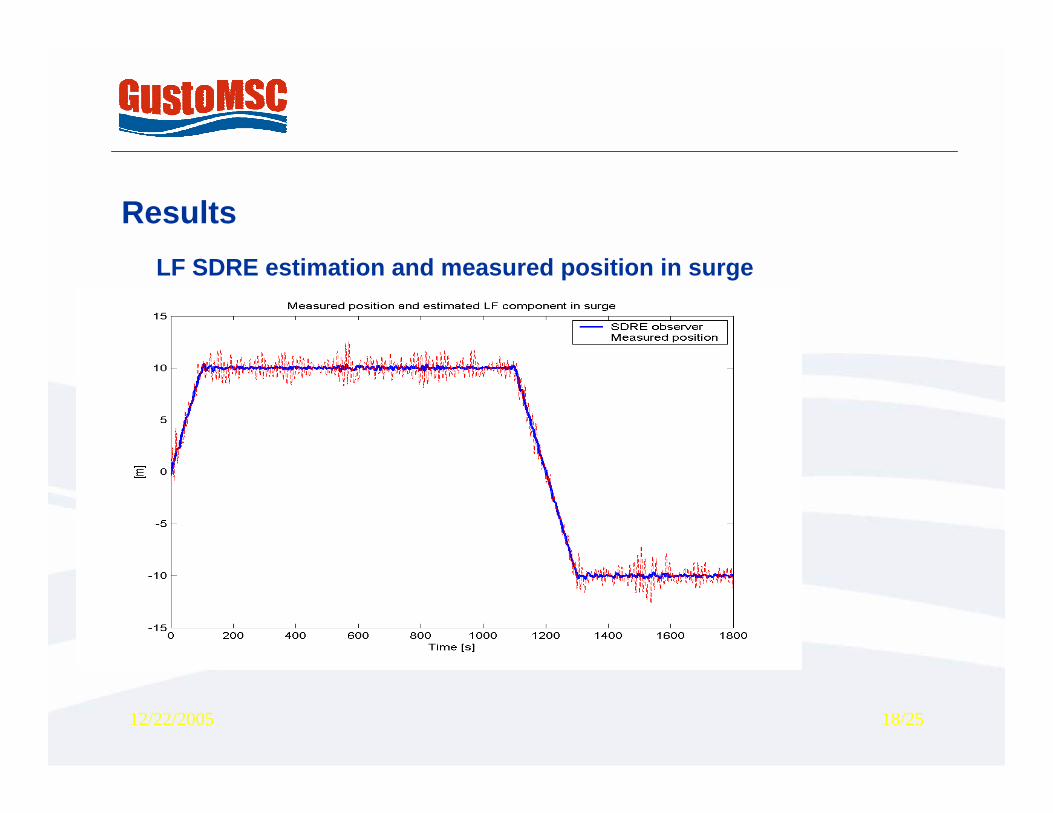
ResultsLF SDRE estimation and measured position in surge
12/22/2005 19/25
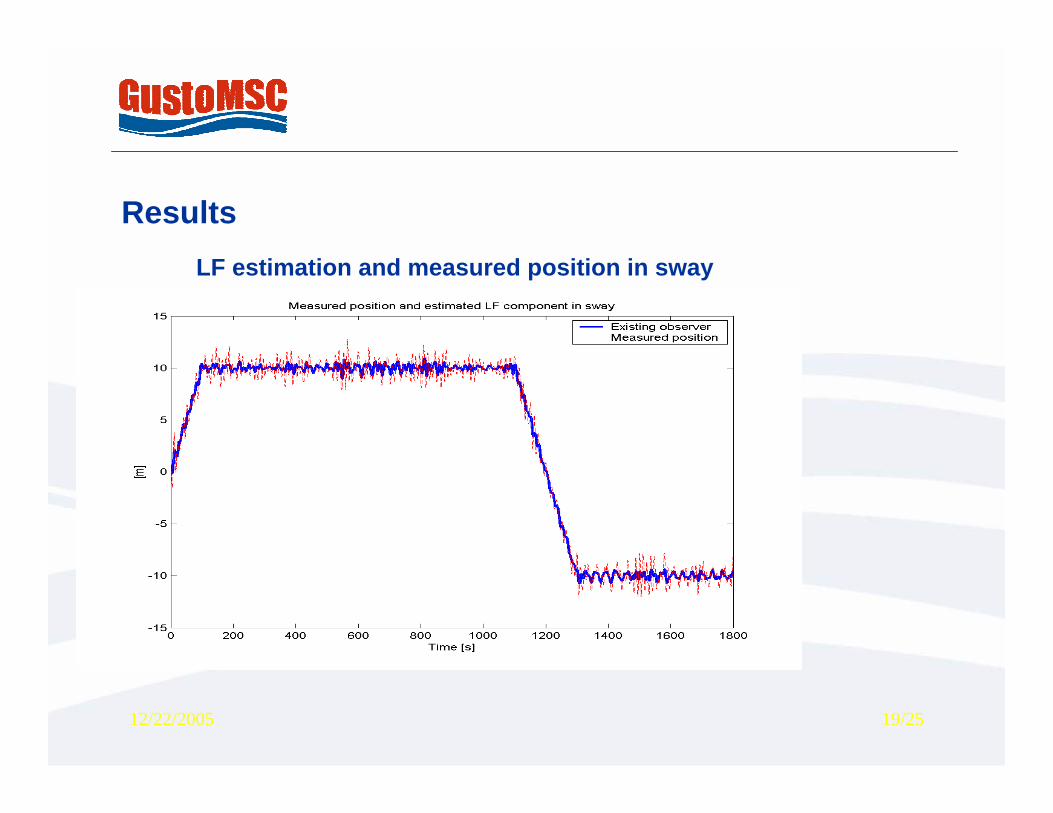
ResultsLF estimation and measured position in sway
12/22/2005 20/25
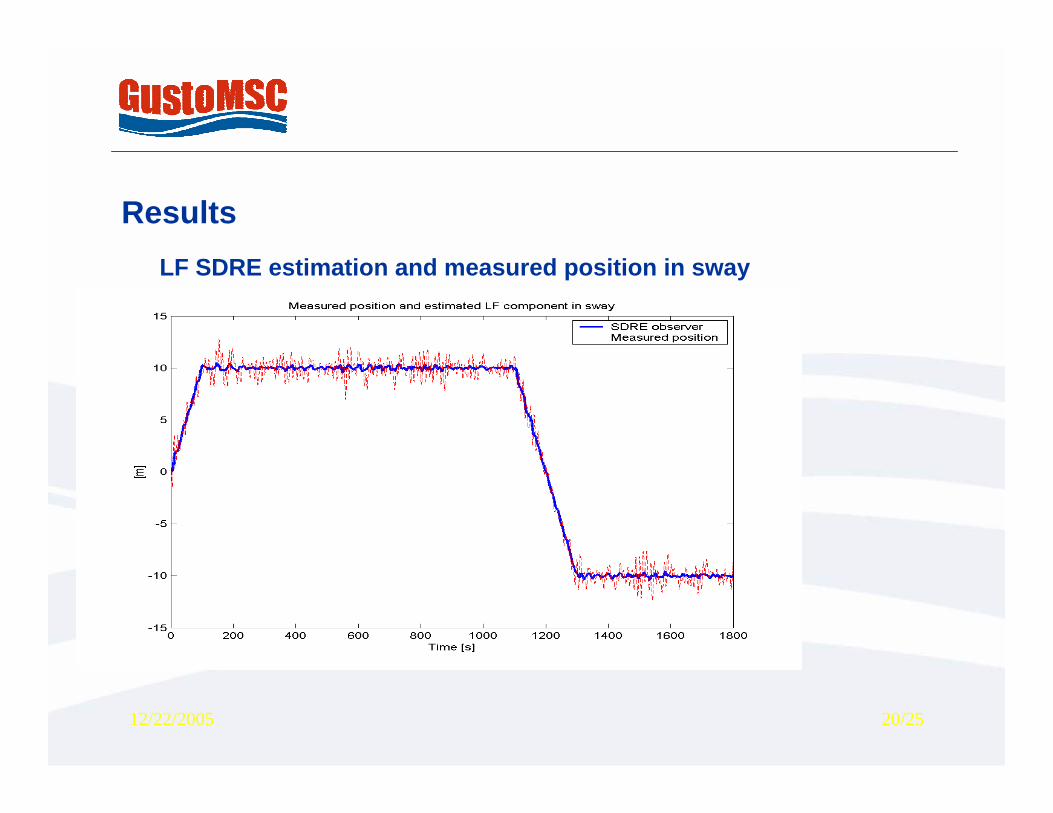
ResultsLF SDRE estimation and measured position in sway
12/22/2005 21/25
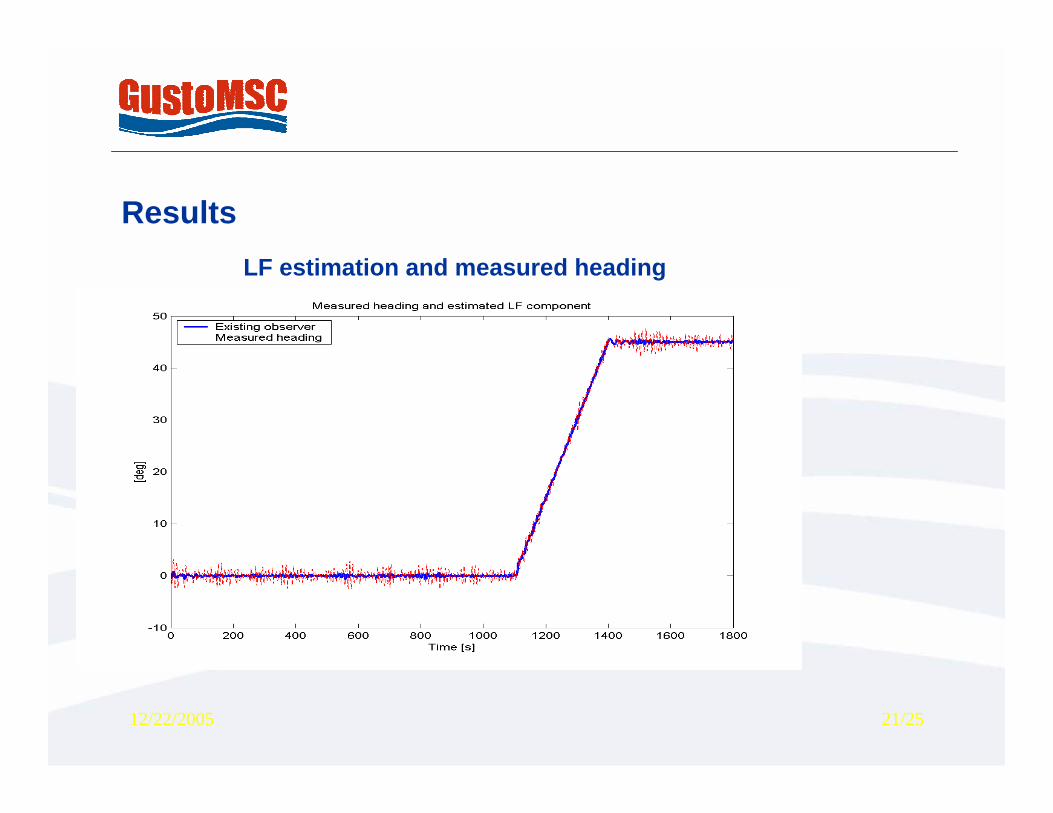
ResultsLF estimation and measured heading
12/22/2005 22/25
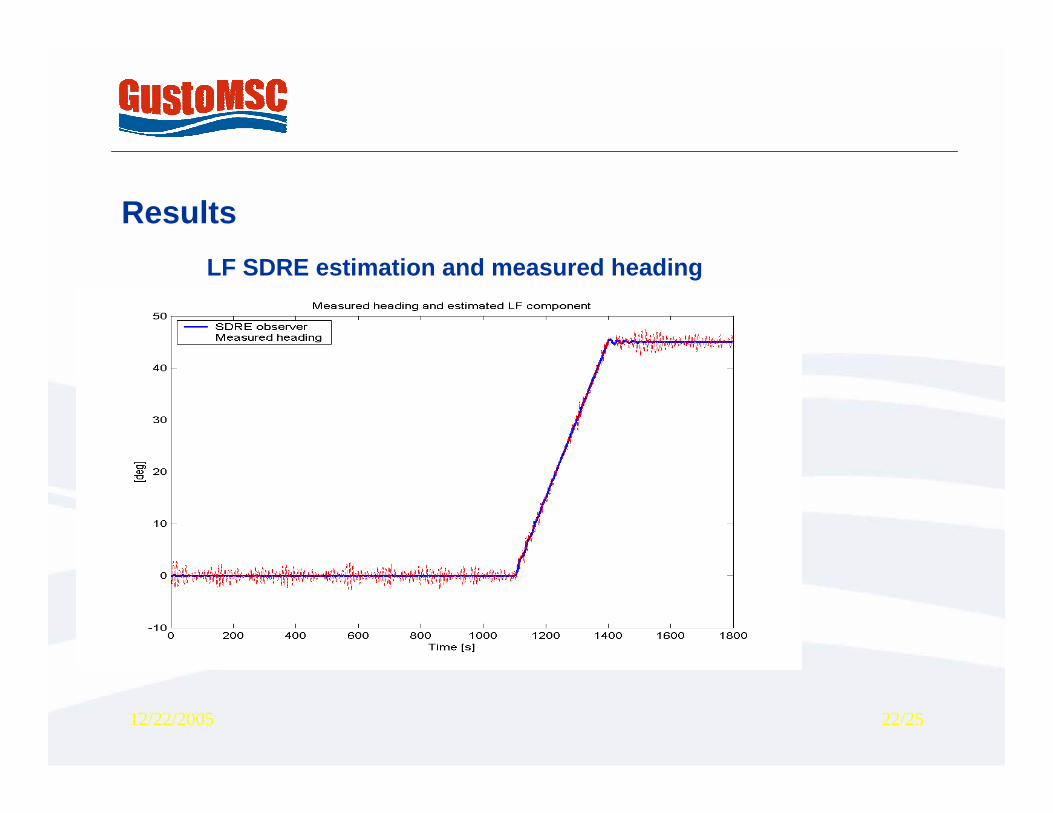
ResultsLF SDRE estimation and measured heading
12/22/2005 23/25
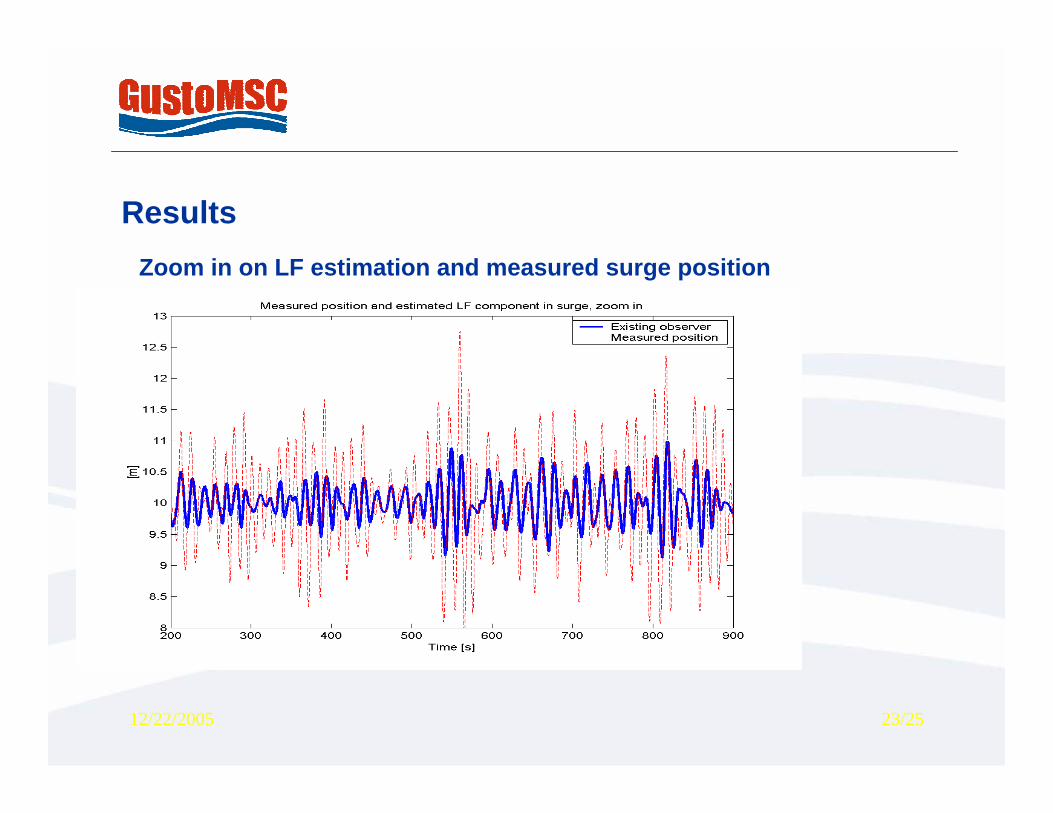
ResultsZoom in on LF estimation and measured surge position
12/22/2005 24/25
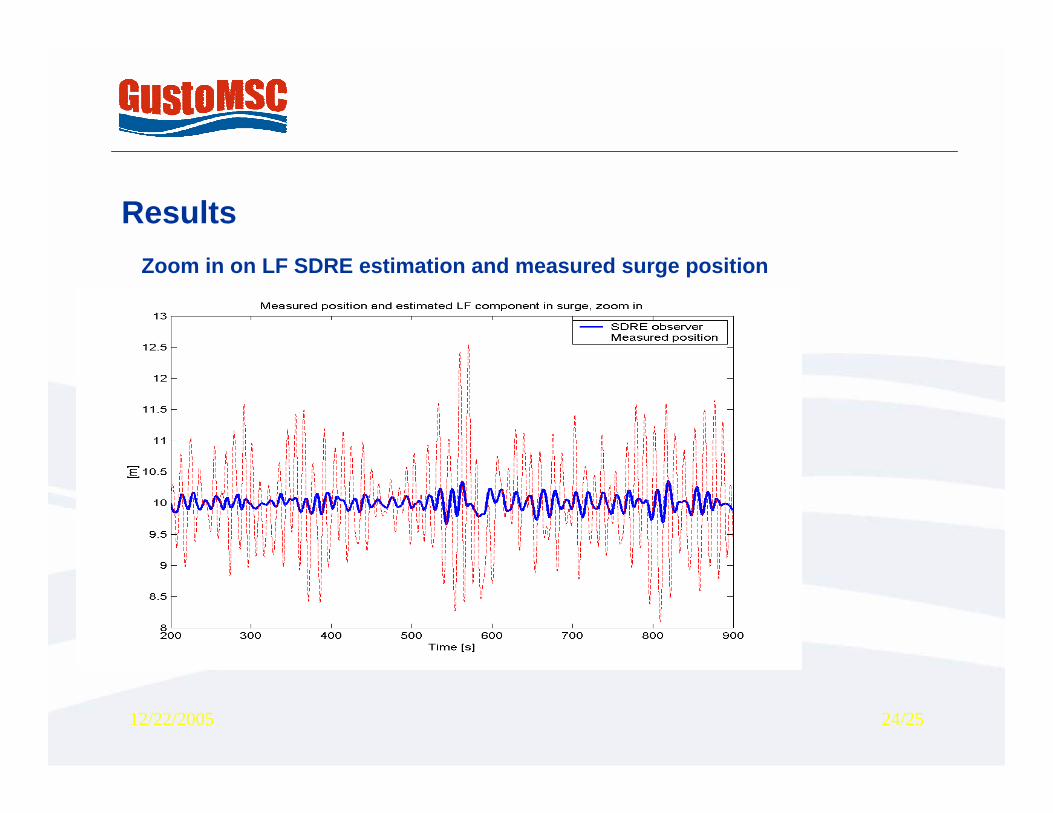
ResultsZoom in on LF SDRE estimation and measured surge position
12/22/2005 25/25
Conclusions
• New nonlinear observer design– Promising simulation results– Flexibility in modeling– Drawback: loss of global stability guarantee
12/22/2005 26/25
Further research
• Extended stability analysis • Algorithms for adjusting the weighting matrices • Usage of different models and methods
12/22/2005 27/25
Reference
[1] G. Torsetnes. Nonlinear Control and Observer Design forDynamic Positioning using Contraction Theory. Master’sthesis, Norwegian University of Science and Technology,2004