nps cruser at-sea research operations using liquid
TRANSCRIPT
NPS CRUSER At-Sea Research Operations using
Liquid Robotics Wave Glider USVs
Don Brutzman, Kevin Smith, Qing Wang Undersea Warfare Academic Group
Naval Postgraduates School
7 May 2014

Liquid Robotics: persistent presence
NPS now has 2 Wave Glider SV2 platforms


Liquid Robotics: big-data computation
NPS planning work using Wave Glider SV3s
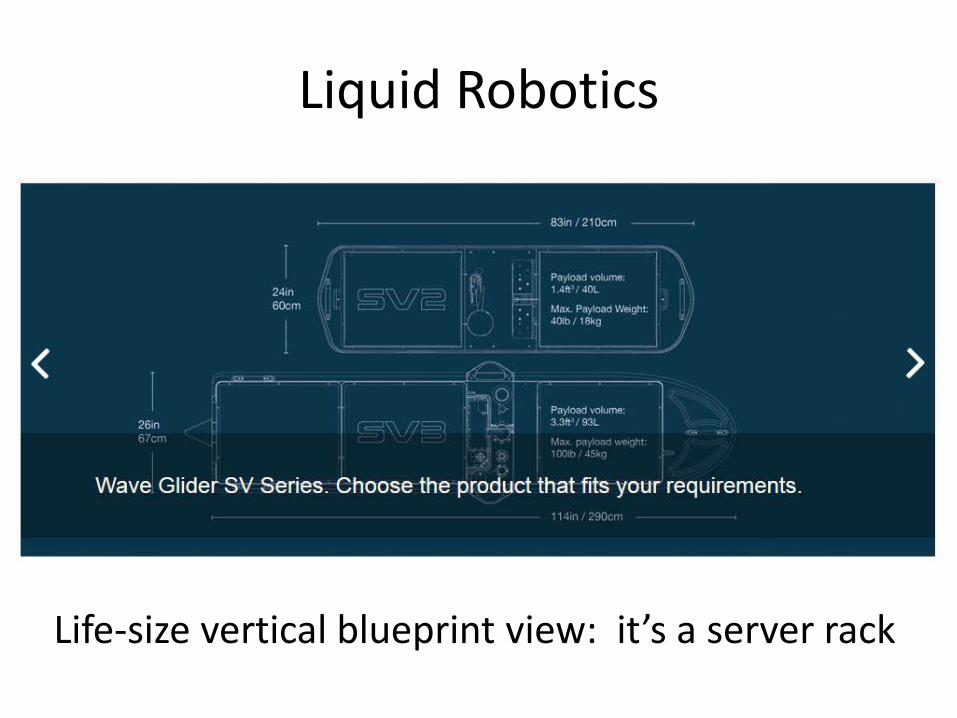
Liquid Robotics
Life-size vertical blueprint view: it’s a server rack

Current group activities
• Lab visit, 1 of 2 vehicles on board • Site visit to Liquid Robotics in Sunnyvale CA • NPS portal: multiple faculty, multiple students • Identify overlapping goals, requirements • “Sea trials” training success, launch + recovery • CRADA definition in progress • Complementary data strategy with MBARI • Preparing for mission operations

Planned span of range operations

Research questions: list keeps growing • How can WaveGliders become operational assets to support NPS research? • How can distributed teams monitor and control a remote asset
collaboratively using a mix of OPCON centers and Web-based access? • How can collected data assets be coherently recorded, archived, visualized
and reused over the long term, supporting student research and operational analysis?
• How might at-sea operations by unmanned systems best complement on-land research efforts being conducted quarterly by NPS and external partners in the Joint Interoperability Field Experiment (JIFX) series?
• What combination of network protocols best support distributed collaboration efforts? Can such approaches mimic the functionality of Navy test ranges or be adapted by Navy laboratories?
• What future steps are appropriate to steadily grow the capabilities and maximize the opportunities afforded by long-duration at-sea testing using the WaveGlider UUV in concert with other NPS unmanned systems (space, airborne, surface and submerged)?
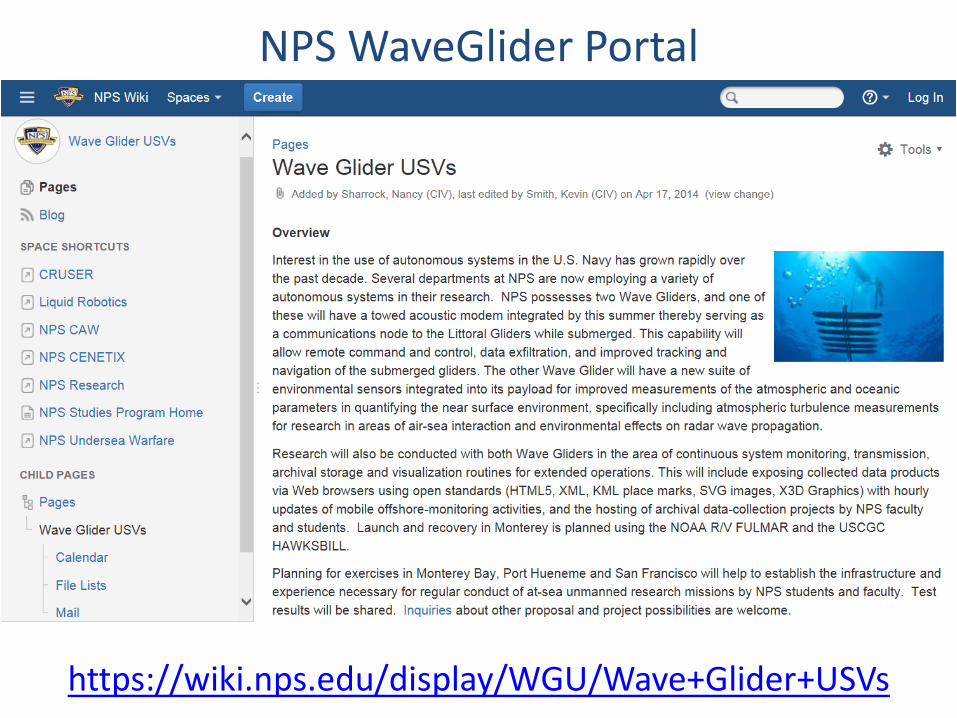
NPS WaveGlider Portal
https://wiki.nps.edu/display/WGU/Wave+Glider+USVs

Funded projects, sponsors, PIs ONR, NPS CRUSER • Kevin Smith, lead investigator • Acoustical tracking of tandem underwater gliders NPS CRUSER • Wang, Lind • Near-surface atmospheric measurements and modeling OPNAV N2N6 • Brutzman Bordetsky Davis Jaeger • Regular at-sea operations with data collection and
visualization support

Wave Glider Operator Training
Completed March-April 2014





Mission planning project efforts 2014
• Support NPS science missions • Explore multiple technologies and techniques
for mission preparation, operations, and post-mission data archiving (Brutzman, Davis)
• San Francisco Bay, Maritime Interdiction Operations (MIO) Exercises (Bordetsky)
• Port Hueneme – Homeland Defense and Mine Warfare Exercises (Jaeger)

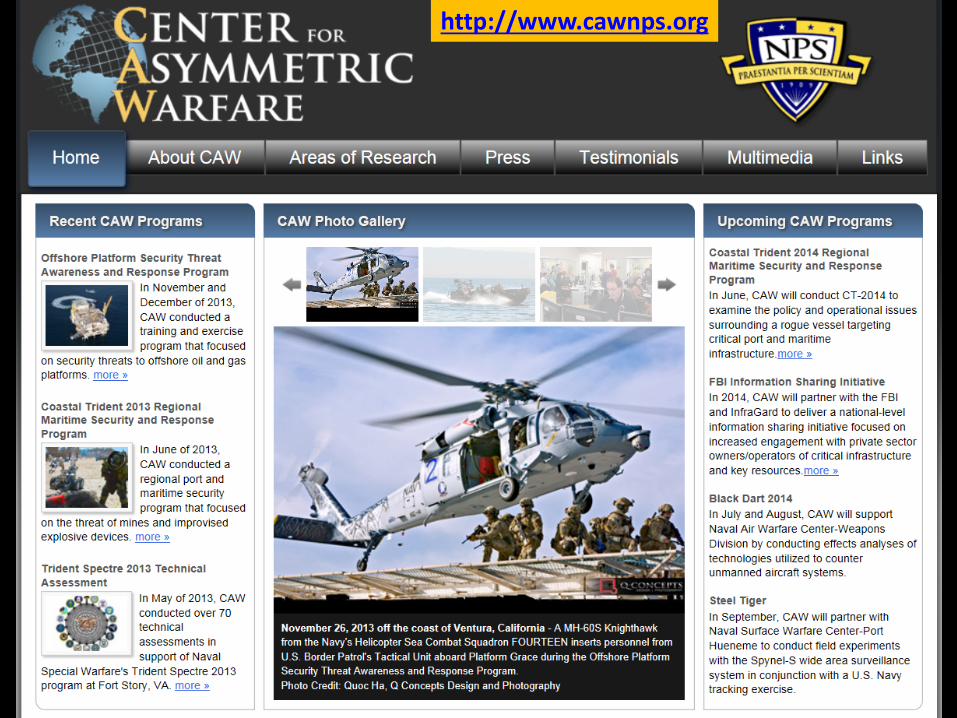
NPS Center Asymmetric Warfare, Alan Yaeger
http://www.cawnps.org
Real-time undersea networking using acoustic communications for
improved AUV positioning and collaboration
FY14-15 CRUSER funded project
Kevin B. Smith, USS Lab, Dept of Physics
Doug Horner, CAVR, Dept of Mech and Astro Engineering
Joe Rice, SeaWeb, Dept of Physics

Objective The primary objective of this work is the enhancement of the navigational and positioning accuracy of autonomous underwater vehicles through a combination of autonomous surface vehicles and bottom deployed underwater acoustic seafloor positioning systems using acoustic communications protocols.
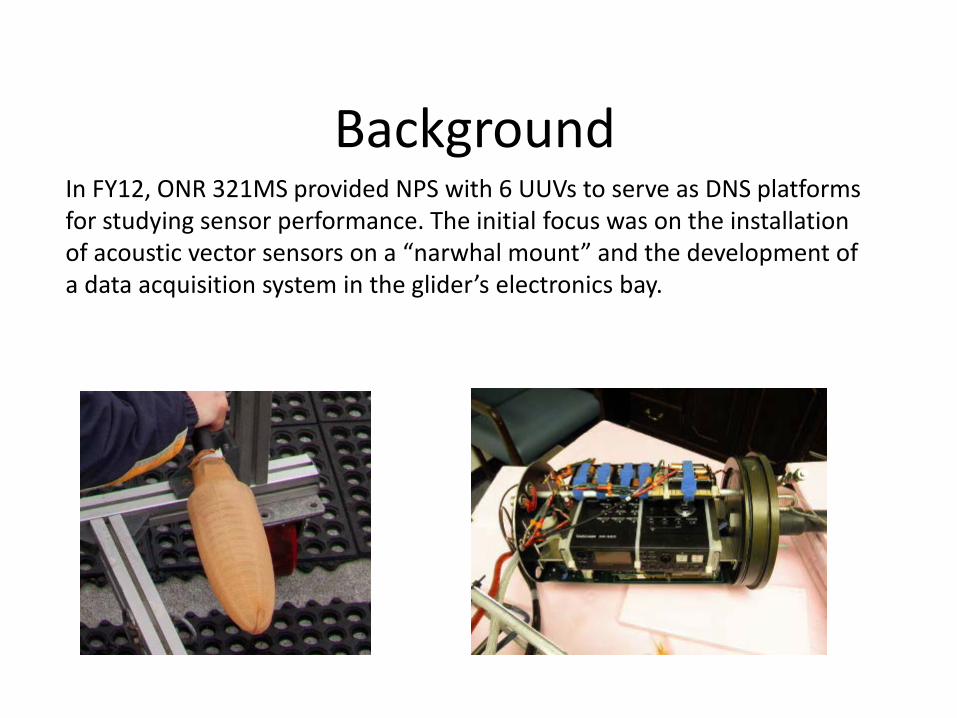
Background In FY12, ONR 321MS provided NPS with 6 UUVs to serve as DNS platforms for studying sensor performance. The initial focus was on the installation of acoustic vector sensors on a “narwhal mount” and the development of a data acquisition system in the glider’s electronics bay.

Vector Sensor Performance The interest in testing acoustic vector sensors from a UUV is due to the fact that a single sensor can provide directionality without the need of multiple sensors spread over an aperture. Even basic, linear processing can be shown to produce a cardioid beam pattern with a deep, directional null.

FY13 Data Collection To date, NPS has successfully deployed and recovered these UUVs on approximately 10 different occasions. Most recently, in Sept 2013, NPS flew one of the gliders continuously overnight, collecting both acoustic and environmental (sound speed) data. New environmental sensors have recently been acquired that will allow other environmental factors (temperature, conductivity, turbidity, etc) to be measured.
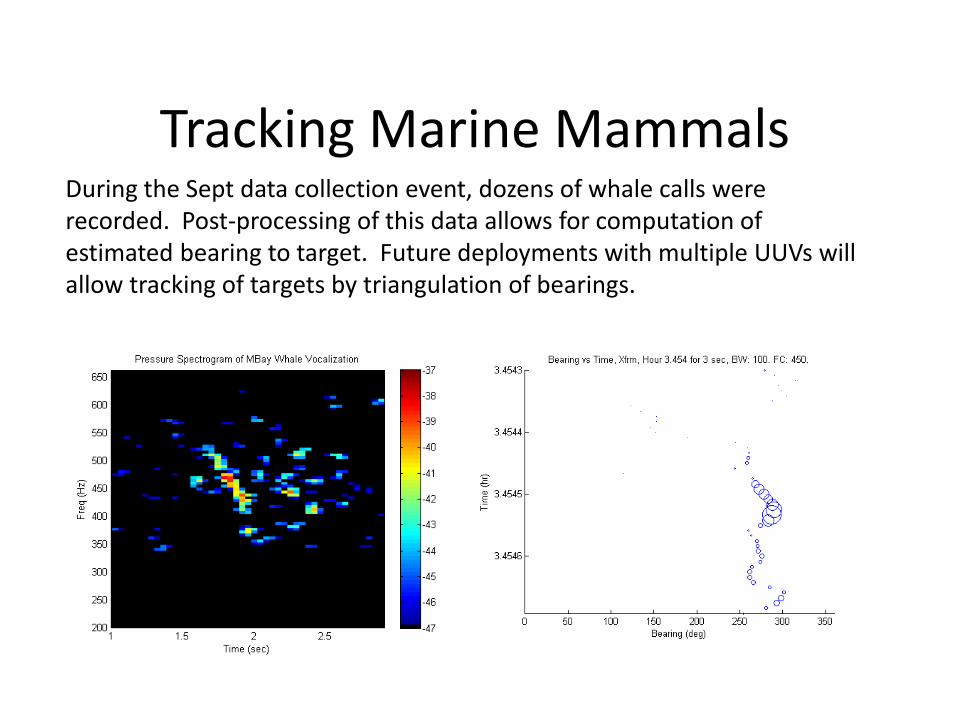
Tracking Marine Mammals During the Sept data collection event, dozens of whale calls were recorded. Post-processing of this data allows for computation of estimated bearing to target. Future deployments with multiple UUVs will allow tracking of targets by triangulation of bearings.

Future Studies The previous work performed shows tremendous promise for uses of these types of systems. In FY14-16, we intend to address the following: 1) Currently, gliders record enviro data which can only be retrieved after system
recovery. In addition, once submerged, glider tasking cannot be affected. Install acoustic modems on gliders for data exfiltration and C&C while
submerged. Utilize Wave Gliders as acomms nodes. Planned for FY14. Develop on-board processing that allows enviro/acoustic data to affect
mission planning. Planned for FY15-16. 2) Acoustic data cannot be exfiltrated wirelessly due to low bandwidth.
Develop on-board processing that reduces to contact reports. Planned for FY15-16.
3) Glider position estimation is limited when submerged, negatively impacting ability to target contacts. Utilize acomms with Wave Gliders to establish precise range information
from known GPS location. Planned for FY14. Utilize acomms with fixed, seafloor nodes to establish precise range
information. Planned for FY15.

constellation of acoustic positioning nodes
fixed on seabed
Exocetus UUV
Shipboard command center
Iridium satellite constellation
Wave Glider USV
GPS satellite
constellation
Exocetus UUV
Operational Concept
FY14 Proposed Milestones Dec, 2013 - Mar, 2014 – Integration and testing of acoustic modems
and software in Exocetus Littoral Gliders. Dec, 2013 - Mar, 2014 – Integration and testing of acoustic modems
and software in Liquid Robotics Wave Gliders. Mar-May, 2014 – Integration and testing of communications and
timing algorithms into Exocetus Littoral Gliders and Liquid Robotics Wave Gliders.
Jun-Aug, 2014 – Experimental deployment of systems in Monterey Bay. Evaluate communication link success, and positioning and navigation results.
Sept, 2014 – Complete analysis of all positioning, navigation, and timing data. Provide draft reports on analysis. Formalize final processing string.
FY15 Proposed Milestones Oct, 2014 - Mar, 2015 – Integration and testing of updated
navigation, position, and timing algorithms into Exocetus Littoral Gliders and Liquid Robotics Wave Gliders for use with existing bottom deployed acoustic navigation positioning system.
Apr-May, 2015 – Experimental deployment of systems in location TBD. Evaluate communication link success, and positioning and navigation results.
Jun-Sept, 2015 – Complete analysis of all positioning, navigation, and timing data. Formalize final processing string. Provide final reports on analysis.
Environmental Data Collection Using Autonomous Wave Gliders
Qing Wang, Dick Lind, Kate Hermsdorfer
Meteorology Department
Kevin B. Smith, Joe Rice Physics Department
Naval Postgraduate School

Physical Processes Occurring at the Air-Sea Interface
Wave/Swell SST

Research in the Marine Boundary Layer Processes Lab, Meteorology Department (Qing Wang’s lab)
• Measurements and analyses of marine boundary layers
- Research aircraft (flight level, dropsonde, AXBT/AXCTD) - Research vessels (in situ flux measurements, profile measurements) - Surface buoy (flux and mean) - Wave glider (new project)
Key: Model parameterization assessment and development
• Forecast model evaluation and improvements using observational data
- COAMPS atmosphere - COAMPS/NCOM coupled model (Gulf of Tehuantepec) - COAMPS/NCOM/SWAN coupled model (HiRes)
Key: coupled model assessment and development

(From Liquid Robotics Federal Product Specification, SV3)
Marine Air-Sea Flux (MASFlux) Buoy
Sampling at Air-Sea Interface in Undisturbed Air
Direct flux measurements Bulk flux estimates 2-D wave spectra Top water layer temperature Fixed location/drifting Limited sea conditions
Bulk flux estimates 2-D wave spectra Water temperature profile Autonomous Broad sea conditions
1) Evaluate the adequacy of Wave Glider METOC measurements of the atmospheric and oceanic parameters in quantifying the near surface environment. • Upgrade the NPS USV to METOC Plus Wave Glider
instrumentation by adding wave and GPCTD sensors. • Joint deployment of MASFlux buoy and NPS USV Mako in
Monterey Bay • Extensive data analyses on MASFlux/Mako comparison
Project Objectives

MASFlux
Project Objectives (cont’d): Flux Sampling from SHARC
2) Perform initial feasibility study on implementing turbulence measurement capability as a payload system onto the SHARC.
• Flux payload development • Flux payload at-sea testing
(Adapted From Liquid Robotics Federal Product Specification, SV3)
SHARC with flux payload (illustration only)
3) Evaluate SHARC measurements from a broader range of environmental conditions across major oceans using PacX data across the Pacific Ocean (LRI) and data currently being collected across the Atlantic Ocean by NAVOCEANO.
4) Engage Navy METOC students at the leading edge of capability and technology development as a crucial component of their education at NPS.
Project Objectives (cont’d):

1) Evaluate the impact of SHARC measurements to coupled environmental forecast
• Use SHARC measurements to evaluate forecast models • Assimilation of SHARC measurements in coupled forecast
models • Thesis students available for this work • NRL collaborator identified • Potential sponsors TBD
2) Various payload systems for SHARC for specific research applications
• NPS led Multidisciplinary University Research Initiative (MURI) proposal on EM/EO propagation (FY2015-FY2019) ----- ONR
Future Plan

NEXT STEPS
Shorten MiW detect-to-engage chain
• Search map minefield using WaveGlider • Sense locate classify ID, mines/non-mines • Mark laser beacons or reflectors or … not? • Destroy high-altitude JDAM • Monitor confirm mine placement, AAR
System deployment: highly scalable, affordable, survivable, persistent, available on demand
Potential project

Lots of activity
Undersea Warfare Academic Group faculty and students remain interested in all potential activity • Defense and government • Research sponsors • We can partner with industry • Community events
All feedback welcome, thanks for considering the opportunities.

Don Brutzman
Ph.D., LCDR USN (Ret.) [email protected]
[email protected] http://faculty.nps.edu/brutzman
Code USW/Br, Naval Postgraduate School
Monterey California 93943-5000 USA 1.831.656.2149 work 1.831.402.4809 cell
Contact