numerické řešení rovinných prutových soustav podle teorie...
TRANSCRIPT
VŠB-Technická univerzita Ostrava Fakulta stavební Studentská vědecká odborná činnost školní rok 2004-2005
Numerické řešení rovinných prutových soustav
podle teorie II.řádu Předkládá student : Lenka Randýsková Odborný garant : Doc. Ing. Petr Janas, CSc. Katedra : Stavební mechaniky
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 2 -
Obsah Numerické řešení rovinných prutových soustav podle teorie II.řádu __________ 3
Anotace________________________________________________________________ 3 Annotation _____________________________________________________________ 3 1. Primární vektor a matice tuhosti zakřiveného prutu_____________________ 5 2. Přenosové matice___________________________________________________ 10 3. Postup při výpočtu__________________________________________________ 12 4. Popis vytvořeného SW ______________________________________________ 13 5. Příklady ____________________________________________________________ 15
5.1 Příklad č.1 _______________________________________________________ 15 5.1.1 Zadání _________________________________________________________ 15 5.1.2 Řešení dle teorie I.řádu __________________________________________ 16 5.1.3 Řešení dle teorie II.řádu __________________________________________ 17 5.1.4 Porovnání a zhodnocení výsledků dle teorie I. a II. řádu ______________ 18 5.1.5 Řešení dle [3] ___________________________________________________ 18 5.1.6 Porovnání výsledků dle numerického řešení a dle [3]_________________ 19 5.2 Příklad č.2 _______________________________________________________ 20 5.2.1 Zadání _________________________________________________________ 20 5.2.2 Řešení dle teorie I.řádu __________________________________________ 20 5.2.3 Řešení dle teorie II.řádu __________________________________________ 22 5.2.4 Porovnání a zhodnocení výsledků dle teorie I. a II.řádu_______________ 23
6. Závěr_______________________________________________________________ 23 Použité materiály ______________________________________________________ 24 Příloha 1 ______________________________________________________________ 25 Příloha 2 ______________________________________________________________ 27

Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 3 -
NUMERICKÉ ŘEŠENÍ ROVINNÝCH PRUTOVÝCH SOUSTAV PODLE TEORIE II.ŘÁDU
Řešitel: Lenka Randýsková, VŠB – TU Ostrava, Fakulta stavební studentka V. ročníku, obor : Pozemní stavitelství Vedoucí práce: Doc. Ing. Petr Janas, CSc. VŠB – TU Ostrava, Fakulta stavební Anotace
Základem tohoto řešení je obecná deformační metoda. Princip numerické metody spočívá v tom, že se prut rozdělí na velký počet malých úseků, které se pak považují za přímky konstantního průřezu. Tuto metodu řešení je možné použít pro řešení prutů jakéhokoliv tvaru a průřezu, tzn. že lze řešit i zakřivené pruty proměnného průřezu. Může se zde dále počítat s libovolným zatížením, třeba i se spojitým normálovým zatížením, což jiné metody řešení podle teorie II.řádu neumožňují.
Řešení prutové soustavy se nejprve provede podle teorie I.řádu, tím získáme přetvoření jednotlivých prutů, která udělíme prutům zadané prutové soustavy a dále pak provedeme výpočet podle teorie II.řádu. Tak získáme další přetvoření a znovu provedeme výpočet pro deformovanou soustavu a postupujeme tak dlouho, dokud se dva po sobě následující kroky shodují s požadovanou přesností.
Celý tento postup jsem automatizovala pomocí počítače (vytvořila jsem si program pomocí počítačových programů Microsoft Excel a Microsoft Visuál Basic). Jednotlivé styčníky se zde zadávají souřadnicemi a pruty se zadávají jako jejich spojnice.
Annotation
Base of this solution is a common deformation method. Principle numerical method is that we divide wands into great numbers of little sections, which we regard as line constant cross-section. This method of answer is possible use to answer of wands, which have random shape and cross-section. That means, that it is possible to solve also incurvate bar with changing cross-section. We can also compute with variety loading types (possibly with continuous axial load, which another method of solutions according to the 2nd order theory do not allow).
First we design solution of the bar system according to the 1st order theory, thereby we are obtaining transformations of particular bars and than we perform calculation according to theory of the 2nd order. This way we are obtaining next transformations of particular bars and we again fulfil calculation for deformed system

Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 4 -
and we are advancing so long as two in sequence following steps agree with request accuracy.
I automated whole this progress by the help of computer (I create programme by the help of computer programme Microsoft excel and Microsoft Visual Basic). Single nodal points set with coordinates and bars ate set as their conjunction.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 5 -
1. Primární vektor a matice tuhosti zakřiveného prutu Nejprve odvodíme deformační součinitele zakřiveného prutu oboustranně
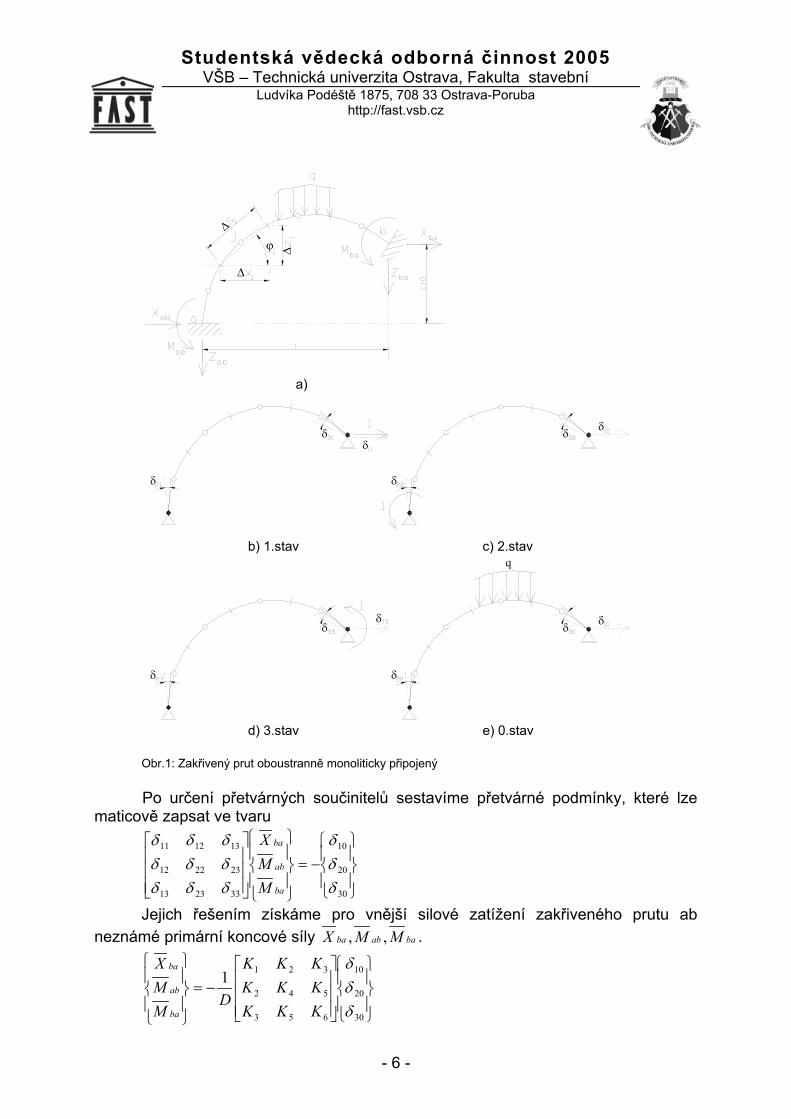
monoliticky připojeného s libovolnou střednicí prutu [1]. Pro řešení základní přetvárně určité soustavy, která je třikrát staticky neurčitá, využijeme obecný algoritmus silové metody a poznatky z řešení staticky neurčitého oblouku. Základní deformační součinitele, na rozdíl od přímého prutu, označíme podle zvyklostí v silové metodě obecně jako přetvárné součinitele δik a δi0. Na obr.1 jsou přetvární součinitelé vyznačeni s kladnou konvencí. Pro přetvárné součinitele δik platí podle Maxwellovy věty o vzájemnosti deformací zaměnitelnost indexů (δik=δki). Přetvární součinitelé δik vyjadřují míry poddajnosti zakřiveného prutu prostě podepřeného. U zakřiveného prutu nelze jednotlivá namáhání vyšetřovat odděleně. Každý účinek ovlivňuje sledované deformace ve všech stavech a matice tuhosti je plná (bez nulových prvků).
Uvažuji zakřivený prut s koncovými body a, b. Průmět vzdáleností obou konců do osy x označíme rozpětím l zakřiveného prutu. Liší se od délky L zakřiveného prutu, která je závislá na funkci střednice prutu. Výškový rozdíl c koncových bodů a, b považujeme za kladný, je-li pravá podpora výše než levá.
Podle obr.1 vytvoříme na základní staticky určité soustavě (zakřiveném nosníku prostě podepřeném) čtyři zatěžovací stavy. U jednotkových stavů volíme jednotkové koncové síly ve stejném smyslu jako kladné složky výsledných koncových sil. Vnější silové zatížení zakřiveného prutu vyvolá na náhradním prostém nosníku zatěžovací veličiny: výslednici vodorovného zatížení a příčné koncové síly. Všechny tyto veličiny jsou na obr.1 zakresleny s kladnou konvencí. Pro jednotlivý i-tý stav určíme pro každý j-tý úsek (prut je rozdělen na n úseků, j=1,2,…n) ohybový moment Mij a normálovou sílu Nij, i=0,1,2,3. Ohybový moment pro j-tý průřez má tvar
M1j = (za-zb)*(xj-xa)/(xb-xa)-(za-zj), M2j = 1+(xj-xa)/(xa-xb), M3j = (xj-xa)/(xa-xb), Moj … závisí na druhu zatížení prutu,
normálová síla pro j-tý průřez N1j = -cosϕj-sinϕj*(za-zb)/(xb-xa), N2j = sinϕj/(xb-xa), N3j = sinϕj/(xb-xa), N0j … závisí na druhu zatížení prutu, kde ϕj = arctg(∆zj/∆xj).
Hodnoty xj a zj jsou souřadnice středu příslušného j-tého úseku. Hodnota xj se určí rozdělením prutu na n dílků, hodnota zj se pak dopočítá pomocí příslušné funkce křivky, která tvoří prut. (Pozn. Je-li rozpětí prutu rovno nule, pak se na n dílků rozdělí vzepětí a dopočítají se hodnoty xj.) Přetvárné součinitele δik pak určíme dle vztahu
j
n
j j
kjijj
n
j j
kjijik s
EANN
sEIMM
∆+∆= ∑∑== 11
δ ,
kde ∆sj = (∆xj2+∆zj
2)1/2.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 6 -
ϕ∆
∆∆
a)
δδ
δ δ
δ δ
b) 1.stav c) 2.stav
δδ
δ δ
δδ
q
d) 3.stav e) 0.stav Obr.1: Zakřivený prut oboustranně monoliticky připojený
Po určení přetvárných součinitelů sestavíme přetvárné podmínky, které lze
maticově zapsat ve tvaru
−=
30
20
10
332313
232212
131211
δδδ
δδδδδδδδδ
ba
ab
ba
MMX
Jejich řešením získáme pro vnější silové zatížení zakřiveného prutu ab neznámé primární koncové síly baabba MMX ,, .
−=
30
20
10
653
542
3211
δδδ
KKKKKKKKK
DMMX
ba
ab
ba
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 7 -
Zbývající tři složky baabab ZZX ,, nutné pro sestavení primárního vektoru abR se stanoví ze statických podmínek rovnováhy.
Matice ve výše uvedeném vztahu je symetrická a obsahuje šest různých tuhostních součinitelů Ki, pro něž platí
K1 = δ22δ33 – δ232,
K2 = δ13δ23 – δ12δ33 , K3 = δ12δ23 – δ13δ22 , K4 = δ11δ33 – δ13
2, K5 = δ12δ13 – δ11δ23 , K6 = δ11δ22 – δ12
2, D pak značí determinant soustavy, který je dán vztahem
D = δ11δ22δ33 – δ11δ232 – δ22δ13
2 – δ33δ122 + 2δ12δ13δ23.
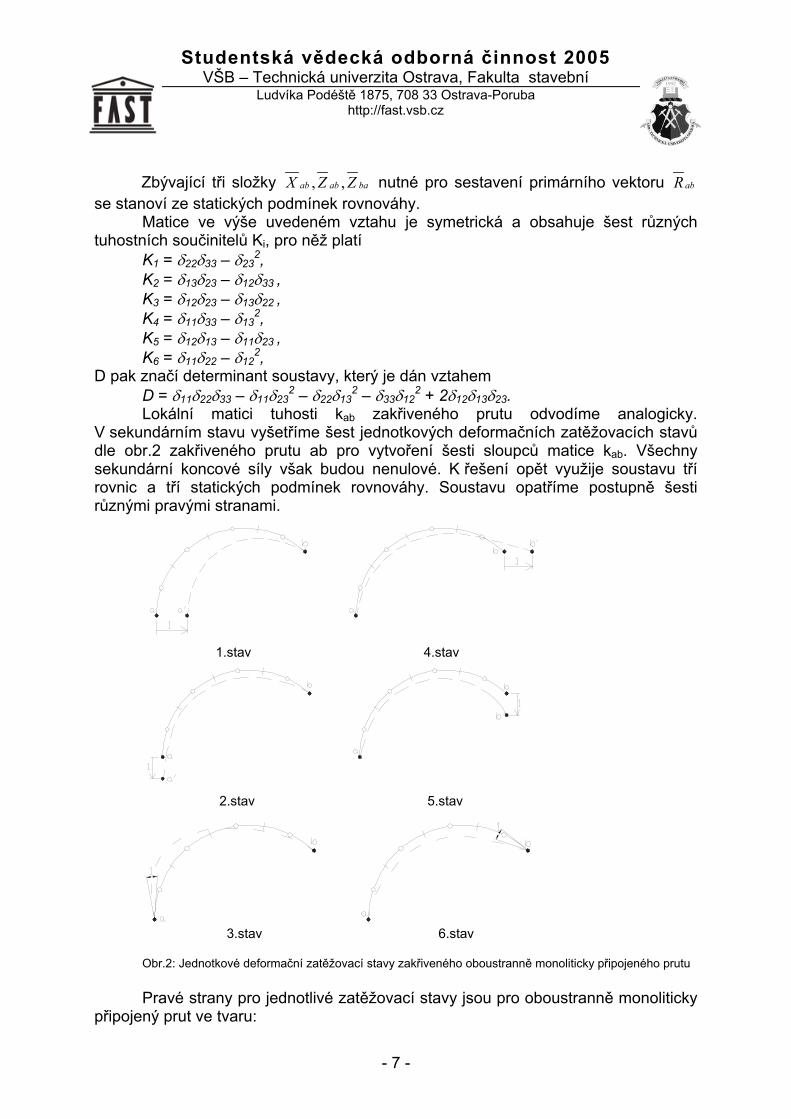
Lokální matici tuhosti kab zakřiveného prutu odvodíme analogicky. V sekundárním stavu vyšetříme šest jednotkových deformačních zatěžovacích stavů dle obr.2 zakřiveného prutu ab pro vytvoření šesti sloupců matice kab. Všechny sekundární koncové síly však budou nenulové. K řešení opět využije soustavu tří rovnic a tří statických podmínek rovnováhy. Soustavu opatříme postupně šesti různými pravými stranami.
1.stav 4.stav
2.stav 5.stav
3.stav 6.stav Obr.2: Jednotkové deformační zatěžovací stavy zakřiveného oboustranně monoliticky připojeného prutu
Pravé strany pro jednotlivé zatěžovací stavy jsou pro oboustranně monoliticky
připojený prut ve tvaru:

Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 8 -
1. zatěžovací stav (ua=1) δ10 = -ua = -1 δ20 = 0 δ30 = 0
2. zatěžovací stav (wa=1) δ10 = -c/l*(-wa) = c/l δ20 = 1/l*(-wa) = -1/l δ30 = -1/l*(-wa) = 1/l
3. zatěžovací stav (ϕa=1) δ10 = 0 δ20 = -ϕa δ30 = 0
4. zatěžovací stav (ub=1) δ10 = ub = 1 δ20 = 0 δ30 = 0
5. zatěžovací stav (wb=1) δ10 = -c/l*wb = -c/l δ20 = 1/l*wb = 1/l δ30 = -1/l*wb = -1/l
6. zatěžovací stav (ϕb=1) δ10 = 0 δ20 = 0 δ30 = ϕb
Pozn. Pro vytvoření těchto pravých stran byly použity vztahy (7.19) z [1] (str.181). Výsledný tvar matice tuhosti kab zakřiveného prutu ab oboustranně monoliticky
připojeného je pak nabývá tvaru
−−−−−−
−−−−−−
−−−−
=
693593
91078107
371271
582482
91078107
371271
1
KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
Dkab ,
kde jsou využiti tuhostní součinitelé a jejich kombinace K7 = (K1c – K2 – K3)/l K8 = (K2c – K4 – K5)/l K9 = (K3c – K5 – K6)/l K10 = (K7c – K8 – K9)/l. Primární vektor a matice tuhosti zakřiveného prutu jednostranně nebo
oboustranně připojeného získáme zjednodušením předchozího obecnějšího postupu, neboť jeden či oba koncové momenty mohou být nulové.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 9 -
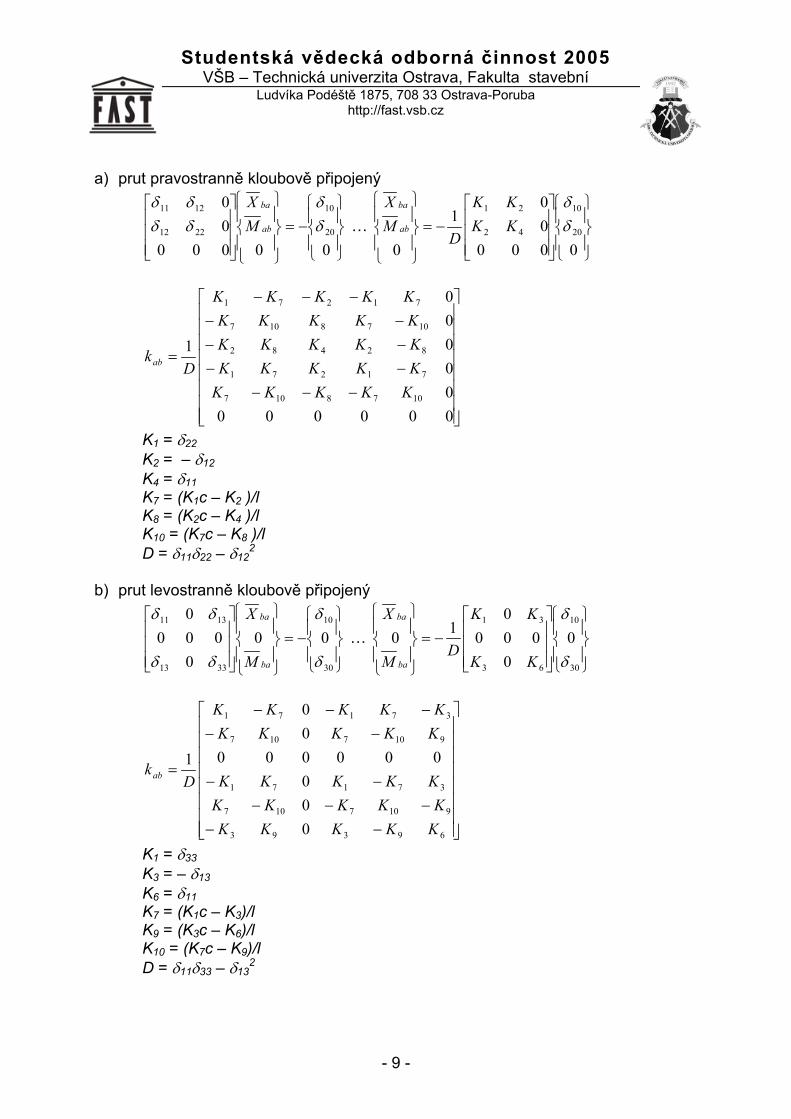
a) prut pravostranně kloubově připojený
−=
0000000
20
10
2212
1211
δδ
δδδδ
ab
ba
MX
…
−=
000000
1
020
10
42
21
δδ
KKKK
DMX
ab
ba
−−−−−−−−−
−−−
=
00000000000
1
1078107
71271
82482
1078107
71271
KKKKKKKKKKKKKKKKKKKKKKKKK
Dkab
K1 = δ22 K2 = – δ12 K4 = δ11
K7 = (K1c – K2 )/l K8 = (K2c – K4 )/l K10 = (K7c – K8 )/l D = δ11δ22 – δ12
2
b) prut levostranně kloubově připojený
−=
30
10
3313
1311
000
0000
δ
δ
δδ
δδ
ba
ba
M
X …
−=
30
10
63
31
00
0000
10δ
δ
KK
KK
DM
X
ba
ba
−−−−−
−−
−−−−−
=
69393
9107107
37171
9107107
37171
000
00000000
1
KKKKKKKKKKKKKKK
KKKKKKKKKK
Dkab
K1 = δ33 K3 = – δ13 K6 = δ11
K7 = (K1c – K3)/l K9 = (K3c – K6)/l K10 = (K7c – K9)/l D = δ11δ33 – δ13
2
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 10 -
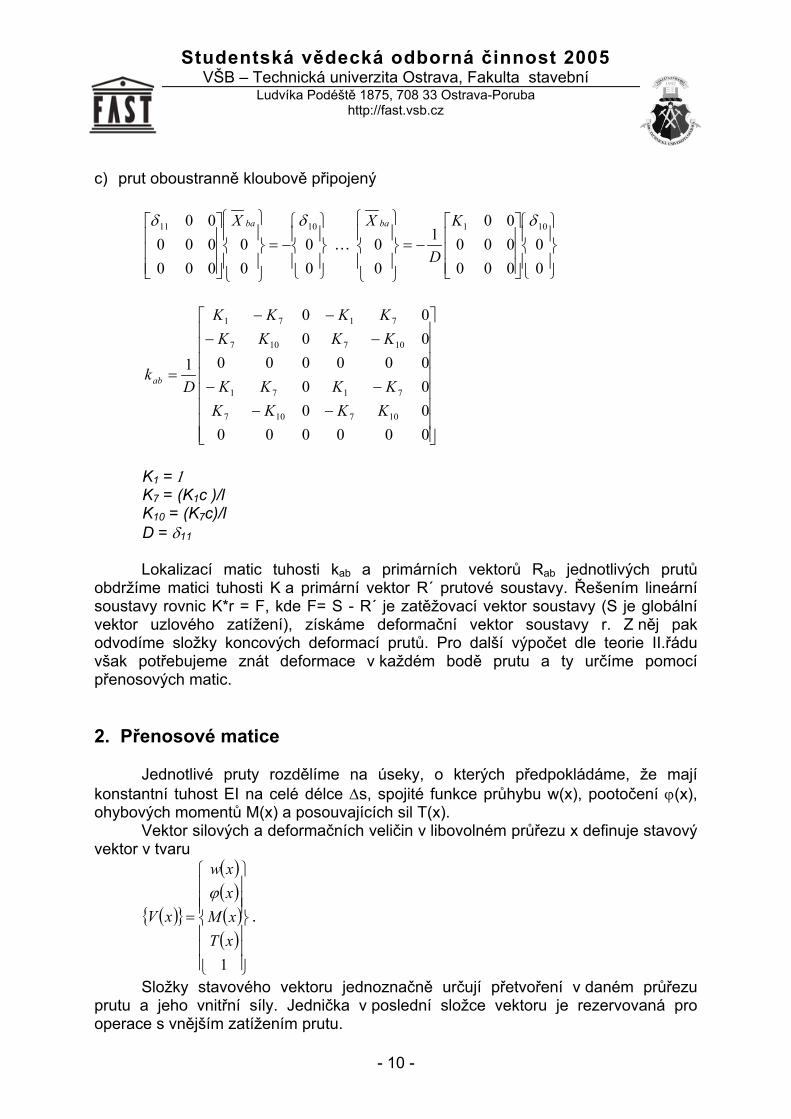
c) prut oboustranně kloubově připojený
−=
00
00
00000000 1011 δδ baX
…
−=
00
00000000
1
00
101 δK
D
X ba
−−−−
−−−−
=
00000000000000000000
1
107107
7171
107107
7171
KKKKKKKK
KKKKKKKK
Dkab
K1 = 1
K7 = (K1c )/l K10 = (K7c)/l D = δ11
Lokalizací matic tuhosti kab a primárních vektorů Rab jednotlivých prutů
obdržíme matici tuhosti K a primární vektor R´ prutové soustavy. Řešením lineární soustavy rovnic K*r = F, kde F= S - R´ je zatěžovací vektor soustavy (S je globální vektor uzlového zatížení), získáme deformační vektor soustavy r. Z něj pak odvodíme složky koncových deformací prutů. Pro další výpočet dle teorie II.řádu však potřebujeme znát deformace v každém bodě prutu a ty určíme pomocí přenosových matic. 2. Přenosové matice
Jednotlivé pruty rozdělíme na úseky, o kterých předpokládáme, že mají konstantní tuhost EI na celé délce ∆s, spojité funkce průhybu w(x), pootočení ϕ(x), ohybových momentů M(x) a posouvajících sil T(x).
Vektor silových a deformačních veličin v libovolném průřezu x definuje stavový vektor v tvaru
( ){ }
( )( )( )( )
=
1xTxMxxw
xVϕ
.
Složky stavového vektoru jednoznačně určují přetvoření v daném průřezu prutu a jeho vnitřní síly. Jednička v poslední složce vektoru je rezervovaná pro operace s vnějším zatížením prutu.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 11 -
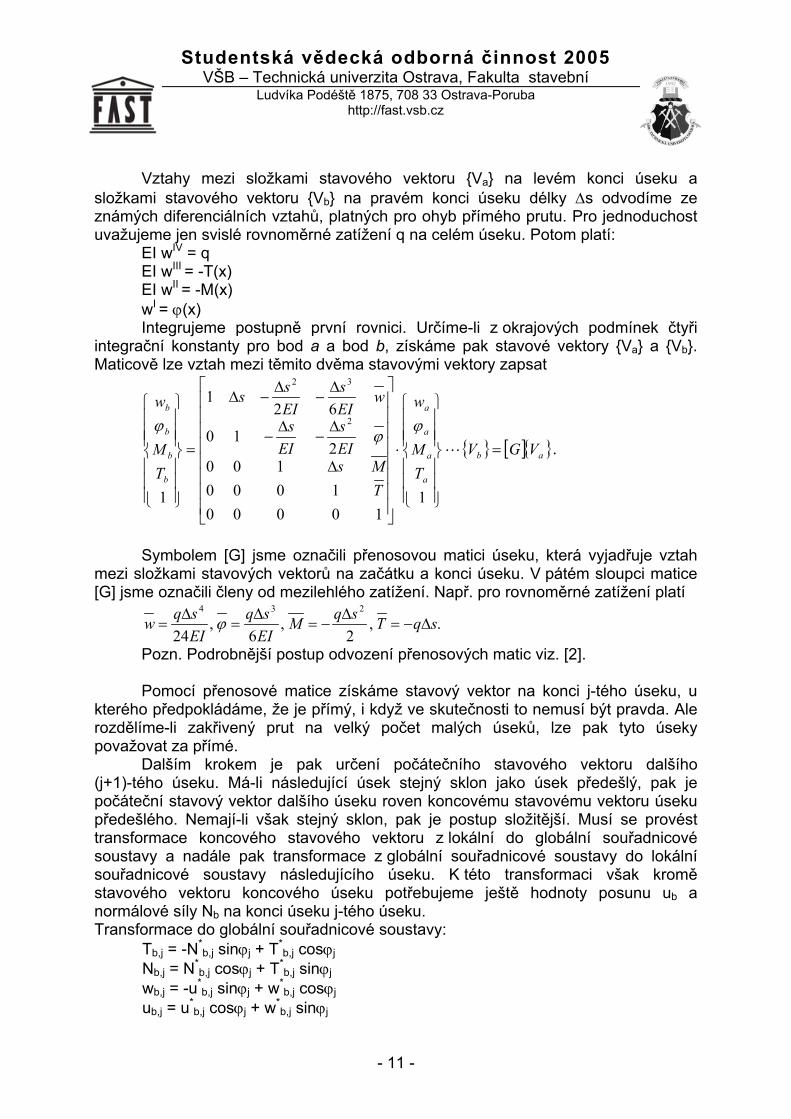
Vztahy mezi složkami stavového vektoru {Va} na levém konci úseku a složkami stavového vektoru {Vb} na pravém konci úseku délky ∆s odvodíme ze známých diferenciálních vztahů, platných pro ohyb přímého prutu. Pro jednoduchost uvažujeme jen svislé rovnoměrné zatížení q na celém úseku. Potom platí:
EI wIV = q EI wIII = -T(x)
EI wII = -M(x)
wI = ϕ(x) Integrujeme postupně první rovnici. Určíme-li z okrajových podmínek čtyři
integrační konstanty pro bod a a bod b, získáme pak stavové vektory {Va} a {Vb}. Maticově lze vztah mezi těmito dvěma stavovými vektory zapsat
{ } [ ]{ }ab
a
a
a
a
b
b
b
b
VGVTM
w
TMs
EIs
EIs
wEIs
EIss
TM
w
=
⋅
∆
∆−
∆−
∆−
∆−∆
=
L
110000
1000100
210
621
1
2
32
ϕϕ
ϕ.
Symbolem [G] jsme označili přenosovou matici úseku, která vyjadřuje vztah
mezi složkami stavových vektorů na začátku a konci úseku. V pátém sloupci matice [G] jsme označili členy od mezilehlého zatížení. Např. pro rovnoměrné zatížení platí
.,2
,6
,24
234
sqTsqMEIsq
EIsqw ∆−=
∆−=
∆=
∆= ϕ
Pozn. Podrobnější postup odvození přenosových matic viz. [2]. Pomocí přenosové matice získáme stavový vektor na konci j-tého úseku, u
kterého předpokládáme, že je přímý, i když ve skutečnosti to nemusí být pravda. Ale rozdělíme-li zakřivený prut na velký počet malých úseků, lze pak tyto úseky považovat za přímé.
Dalším krokem je pak určení počátečního stavového vektoru dalšího (j+1)-tého úseku. Má-li následující úsek stejný sklon jako úsek předešlý, pak je počáteční stavový vektor dalšího úseku roven koncovému stavovému vektoru úseku předešlého. Nemají-li však stejný sklon, pak je postup složitější. Musí se provést transformace koncového stavového vektoru z lokální do globální souřadnicové soustavy a nadále pak transformace z globální souřadnicové soustavy do lokální souřadnicové soustavy následujícího úseku. K této transformaci však kromě stavového vektoru koncového úseku potřebujeme ještě hodnoty posunu ub a normálové síly Nb na konci úseku j-tého úseku. Transformace do globální souřadnicové soustavy:
Tb,j = -N*b,j sinϕj + T*
b,j cosϕj Nb,j = N*
b,j cosϕj + T*b,j sinϕj
wb,j = -u*b,j sinϕj + w*
b,j cosϕj ub,j = u*
b,j cosϕj + w*b,j sinϕj
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 12 -
Transformace do lokální souřadnicové soustavy následujícího úseku: T*
b,j+1 = Nb,j sinϕj+1 + Tb,j cosϕj+1 N*
b,j+1 = Nb,j cosϕj+1 - Tb,j sinϕj+1 w*
b,j+1 = ub,j sinϕj+1 + wb,j cosϕj+1 u*
b,j+1 = ub,j cosϕj+1 - wb,j sinϕj+1 Pootočení ϕb a momentu Mb se transformace netýká, neboť mají ve všech souřadnicových soustavách stejnou hodnotu. 3. Postup při výpočtu
1. Jednotlivé pruty zadané prutové soustavy rozdělíme na velký počet malých dílků a vyřešíme ji podle teorie I.řádu za pomoci matic tuhosti a primárních vektorů vytvořených numericky podle typu připojení dle výše uvedených vztahů. Výsledkem tohoto výpočtu jsou mimo jiné přetvoření prutů v jejich koncových bodech. Pomocí přenosových matic pak určíme přetvoření i v průřezech, které odpovídají jednotlivým úsekům, na které jsme prut rozdělili.
2. Jednotlivá přetvoření vypočtené podle teorie I.řádu udělíme odpovídajícím průřezům, tím získáme nové souřadnice jednotlivých průřezů, které odpovídají zdeformované prutové soustavě. Dále provedeme opět výpočet primárních vektorů a matic tuhosti, nyní však pro nově vytvořenou prutovou soustavu.
3. Vyřešíme znovu prutovou soustavu obvyklým postupem, ovšem s nově vypočtenými vektory a maticemi. Tím získáme upřesněné hodnoty přetvoření prutů, které použijeme k určení nových přetvoření jednotlivých průřezů, jejich nových souřadnic a následně i k výpočtu nových primárních vektorů a matic tuhosti prutů
4. Bod 3 opakujeme tak dlouho, až zjistíme, že se výsledky dvou po sobě následujících kroků shodují s požadovanou přesností ε.
−=∑
∑
=
=−−−
n
jiii
n
jiii
wu
wu
1
1111
,,
,,1
ϕ
ϕε
5. Po splnění bodu 4 iteraci ukončíme. Hodnoty vypočtené v posledním kroku je pak možno prohlásit za hodnoty vypočtené podle teorie II.řádu.
6. Na závěr je potřeba určit průběhy vnitřních sil na jednotlivých prutech, což je snadný úkol. Hodnoty vnitřních sil v jednotlivých průřezech podle teorie II.řádu jsou totiž rovny hodnotám stavových vektorů, které jsou doplněny o normálové síly, posledního provedeného kroku.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 13 -
4. Popis vytvořeného SW
Za pomocí počítačových programů Microsoft Excel a Microsoft Visuál Basic jsem vytvořila SW, který pracuje na principu numerické metody.
Všechny parametry prutové soustavy, tj. geometrie, průřezové charakteristiky, zatížení apod. se vepisují do políček označených zeleně na listě s názvem Zadání a výsl.. Modrá číselná políčka se nevyplňují, ta se automaticky doplní sama.
Postup zadávání geometrie prutové konstrukce lze rozepsat do těchto bodů: 1) zadání počtu uzlů n a jeho potvrzení pomocí tlačítka OK 2) postupné zadávání souřadnic jednotlivých uzlů (kladné směry jsou zobrazeny na
obrázku), druhu vazby dle přílohy 1 obsažené v SW a následné potvrzení pomocí tlačítka Načti (stupeň neurčitosti se pak automaticky dopočítává sám v závislosti na zadaných druzích vazby v jednotlivých uzlech)
3) zadání počtu prutů a potvrzení tlačítkem OK 4) zadání prutů jako spojnice dvou uzlů (počáteční uzel se zadává vždy jako
styčník), tvar prutu (přímka, parabolický nebo kruhový oblouk), počet úseků prutu, na které bude prut rozdělen a pokud je tvar prut oblouk, pak se musí zadat ještě třetí bod prutu (oblouk lze definovat minimálně třemi body) a opětné potvrzení tlačítkem Načti.
Pomocí těchto popsaných bodů jsme zadali kompletně geometrii prutové soustavy. Zadané hodnoty si můžeme zkontrolovat na listě s názvem Geom.,A,E,I., kde je můžeme případně i opravit. Po celkovém zadání geometrie můžeme spustit tlačítko Vykreslení soustavy, jehož prostřednictvím se nám pomocí funkce graf vykreslí na list Soustava zadaná prutová soustava.
Průřezové charakteristiky se zde nezadávají číselně, ale zadávají se zde parametry vybraného tvaru průřezu prutu. Je zde možno vybrat z tvarů: 1) profil I nebo U (hodnoty průřezových charakteristik se automaticky načtou
z přílohy 2 obsažené v SW) 2) obdélníkový průřez, u kterého se zadá jeho šířka b a výška h, průřezové
charakteristiky se dopočtou samy 3) kruhový průřez, zde se zadá vnější průměr d1 a vnitřní průměr d2, ostatní hodnoty
se opět dopočtou samy. Kromě průřezových charakteristik je zde potřeba zadat ještě model pružnosti
v tahu a tlaku E. Zadané hodnoty si můžeme opět zkontrolovat na listě Geom.,A,E,I V SW můžeme zadat toto zatížení:
1) libovolný počet silových zatížení v každém styčníku, které se zadávají jejich velikostí a úhlem. Mimostyčníkové silové zatížení se zadává jako styčníkové pomocí vloženého uzlu (z důvodu ulehčení výpočtu primárních vektorů).
2) libovolný počet momentových zatížení ve styčníku, které se zadává pouze velikostí. Mimostyčníkové silové zatížení se zadává jako styčníkové pomocí vloženého uzlu (z důvodu ulehčení výpočtu primárních vektorů).
3) spojité zatížení pod libovolným úhlem se zadává po celé délce prutu, pokud není po celé délce, musí se na rozhraní vložit uzel
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 14 -
4) počáteční imperfekce polohy uzlů se zadají pomocí posunu uzlu u a w (kladné směry jsou shodné s kladnými směry pro zadávání souřadnic uzlů) a pootočení uzlu ϕ, jehož kladný smysl je shodný s kladným smyslem momentu
Zadané hodnoty si můžeme opět zkontrolovat na listě s příslušným názvem zatížení.
Prvním krokem výpočtu je výpočet dle teorie I.řádu, pomocí kterého získáme mimo jiné hodnoty přemístění jednotlivých bodů prutů, které jsou potřebné k určení nového tvaru prutové soustavy pro další výpočet podle II.řádu. Kromě těchto hodnot získáme i další hodnoty vypočtené podle teorie I.řádu a II.řádu:
vektor uzlového zatížení S globální primární vektory jednotlivých prutů primární vektor soustavy R zatěžovací vektor soustavy F = S - R globální matice tuhosti k jednotlivých prutů o rozměrech 6x6 celková matice tuhosti K o rozměrech npxnp deformační vektor r prutové soustavy globální deformační vektory r jednotlivých prutů globální primární a sekundární vektory jednotlivých prutů globální a lokální vektor složek koncových sil prutů
Ještě před spuštěním výpočtu dle teorie II.řádu musíme zadat počet iterací, které má program provést. V závislosti na počtu iterací pak stanoví přesnost výpočtu ε.
Výsledkem řešení dle teorie II.řádu jsou hodnoty vnitřních sil (tj.normálové síly N, posouvající síly V a momenty M) na jednotlivých prutech. Tyto hodnoty jsou jednak znázorněny graficky na listech N, V, M a dále pak program dokáže číselně určit hodnoty N, V a M v libovolném bodě prutu (list Zadání a výsl.). Tento bod se zadává jeho pořadovým číslem v závislosti na počtu úseků, na který jsme prut rozdělili.
Grafické výstupy se vykreslují v měřítku, které musíme zadat ještě před spuštěním výpočtu dle teorie II.řádu. Toto měřítko se vztahuje k délkovým rozměrům prutové soustavy v obou směrech (tj. x a z). Kromě grafických výstupů N, V a M je ještě možno shlédnout grafické výstupy deformované soustavy, také vykreslené v zadaném měřítku.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 15 -
5. Příklady
5.1 Příklad č.1
5.1.1 Zadání
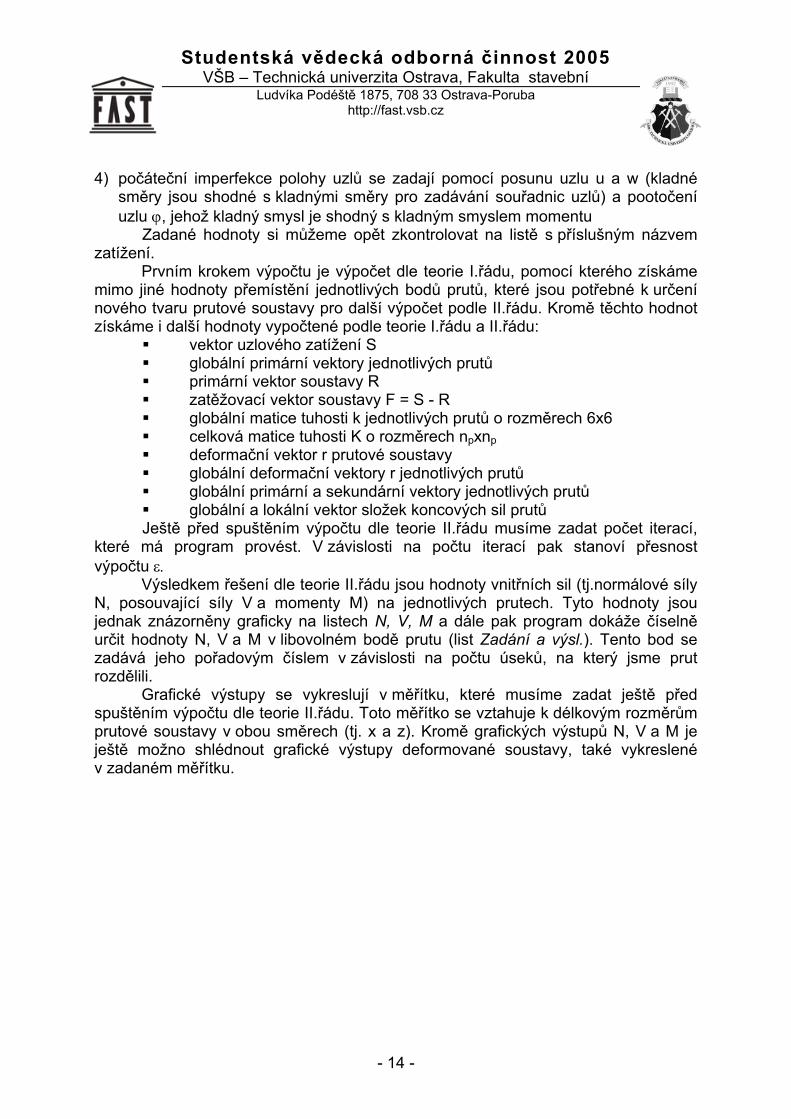
Řešte rovinnou konstrukci na obr.3, která je složena ze dvou vetknutých sloupů (1,2) a dvou opřených kyvných sloupů (3,4), spojených nahoře kloubově třemi příčníky. Vetknuté sloupy mají ohybovou tuhost E1I1, E2I2 a jejich délky jsou l1, l2. Délky kyvných sloupů jsou l3,l4 a délky příčníků d1, d2, d3. Smontovaná nezatížená konstrukce vykazuje odchylky od geometricky ideálního tvaru. Proto do transformačního modelu vstupují vzdálenosti a1, a2, a3, a4 horních konců sloupů od svislice procházející uložením (těžištěm vetknutého průřezu, kloubem) dolních konců sloupů. Tyto odchylky představují ekvivalentní geometrické imperfekce, zahrnující odchylky svislosti, přímosti, odchylky v uložení a nezbytné malé excentricity v přípojích. Silové zatížení konstrukce je svislými silami F1, F2, F3, F4 a horizontálními silami W, EQ. Přetvořený tvar konstrukce je zakreslen spolu s vyznačeným zatížením na obr.3.
Obr.3 : Schéma rámu včetně imperfekcí Každá z vertikálních sil F1, F2, F3, F4 je součtem stálého, dlouhodobého
nahodilého a krátkodobého nahodilého zatížení. Extrémní hodnoty jsou uvedeny v tabulce. Maximální velikost horizontální síly reprezentující účinek větru W = 57 kN. Horizontální síla EQ = 0, protože účinek zemětřesení na konstrukci není zde uvažován. Délky sloupů l1, l2, l3, l4, hodnoty imperfekcí a1, a2, a3, a4 a délky příčníku d1, d2, d3 jsou uvedeny také v tabulce. Vetknutý sloup 1 má průřez HE280B (I=19,3*10-5 m4) a sloup 2 má průřez HE340B (I=3,67*10-4 m4), oba vetknuté sloupy jsou z oceli pevnostní třídy Fe 360, modul pružnosti v tahu E1 = E2 = 210000 MPa.

Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 16 -
Extrémní hodnoty [ kN ] Délka Imper- Délka Síla Stálé Dlouhod. Krátkod.
Součet sloupu
[ m ] fekce
[ mm ] příčníku
[ m ]
F1 200 50 50 300 l1 6 a1 + 30 d1 15 F2 400 150 150 700 l2 9 a2 + 45 d2 15 F3 200 100 200 500 l3 3 a3 + 15 d3 15 F4 100 100 100 300 l4 5,4 a4 + 27
5.1.2 Řešení dle teorie I.řádu • stupeň přetvárné neurčitosti np = 8 • deformační vektor soustavy
r = { u5, w5, u6, w6, u7, w7, u8, w8 }T 1 2 3 4 5 6 7 8
• primární vektory prutů i primární vektor prutové soustavy R´ jsou nulové • vektor uzlového zatížení
P = {57,300,0,700,0,500,0,300}T • zatěžovací vektor soustavy F = P – R´
F = {57,300,0,700,0,500,0,300}T • matice tuhosti prutové soustavy
183791 -2290 -183217 0 0 0 0 0 -2290 458483 0 0 0 0 0 0
-183217 0 367311 -1993 -183768 0 0 0 0 0 -1993 398985 0 0 0 0 0 0 -183768 0 367044 -4585 -183253 0 0 0 0 0 -4585 916966 0 0 0 0 0 0 -183253 0 183266 -2547 0 0 0 0 0 0 -2547 509425
• deformační vektor soustavy
r = K-1*F = 10-3*{75.0, 1.0, 74.9, 2.1, 75.0, 0.9, 75.0, 1.0}T • vnitřní síly na koncích jednotlivých prutů
Prut č. 1 2 3 4 5 6 7 Nab [kN] -299,79 -699,89 -500,01 -300,00 -16,27 4,00 1,50
Vab [kN] 42,23 23,77 0,00 0,00 0,00 0,00 0,00
Mab [kNm] 0,00 0,00 0,00 0,00 0,00 0,00 0,00
Nba [kN] -299,79 -699,89 -500,01 -300,00 -16,27 4,00 1,50
Vba [kN] 42,23 23,77 0,00 0,00 0,00 0,00 0,00
Mba [kNm] 253,39 213,91 0,00 0,00 0,00 0,00 0,00
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 17 -
• reakce ve vnějších vazbách (transformace pro α=0,005rad … dáno poč.imperfekcí) M1 = 253,39 kNm R1 = -299,79*cos(0,005)-42,23*sin(0,005) = -300 kN H1 = -299,79*sin(0,005)+42,23*cos(0,005) = 40,73 kN M2 = 213,91 kNm R2 = -699,89*cos(0,005)-23,77*sin(0,005) = -700 kN H2 = -699,89*sin(0,005)+23,77*cos(0,005) = 20,27 kN R3 = -500,01*cos(0,005) = -500 kN H3 = -500,01*sin(0,005) = -2,5 kN R4 = -300,00*cos(0,005) = -300 kN H4 = -300,00*sin(0,005) = -1,5 kN
• zkoušky : ΣFx = 57-40,73-20,27+2,5+1,5 = 0 … vyhovuje ΣFz = 300+700+500+300-300-700-500-300 = 0 … vyhovuje
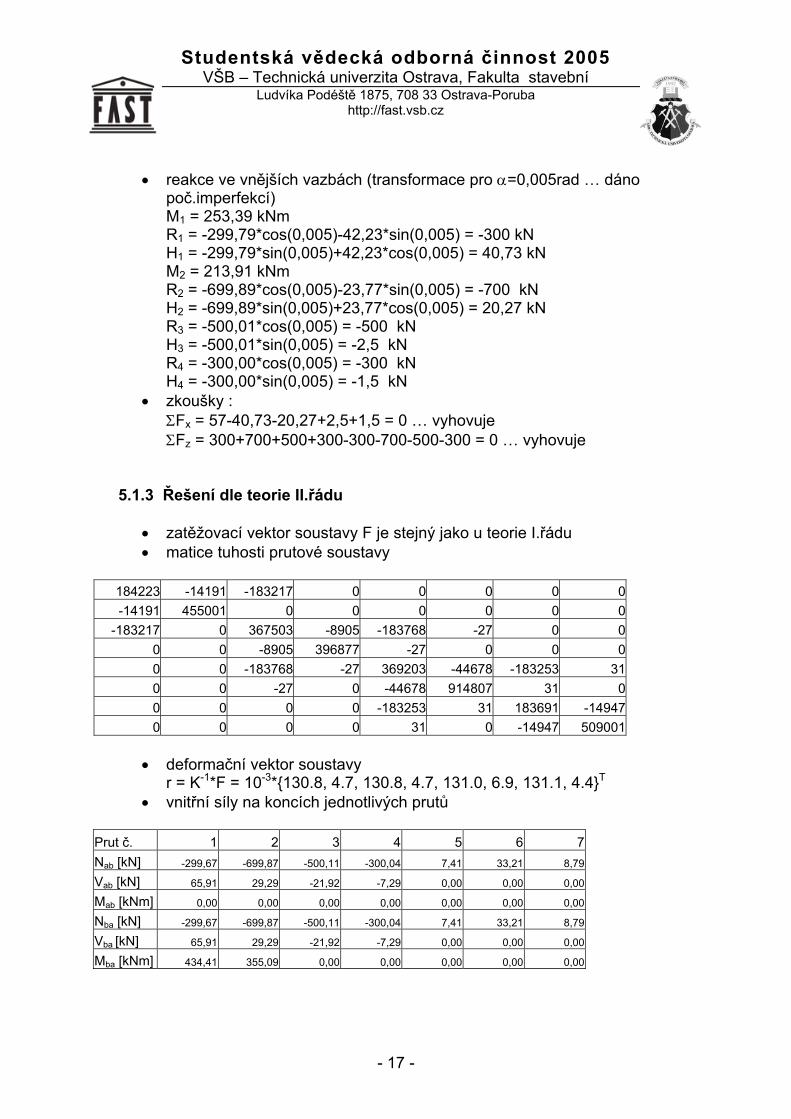
5.1.3 Řešení dle teorie II.řádu
• zatěžovací vektor soustavy F je stejný jako u teorie I.řádu • matice tuhosti prutové soustavy
184223 -14191 -183217 0 0 0 0 0 -14191 455001 0 0 0 0 0 0
-183217 0 367503 -8905 -183768 -27 0 0 0 0 -8905 396877 -27 0 0 0 0 0 -183768 -27 369203 -44678 -183253 31 0 0 -27 0 -44678 914807 31 0 0 0 0 0 -183253 31 183691 -14947 0 0 0 0 31 0 -14947 509001
• deformační vektor soustavy
r = K-1*F = 10-3*{130.8, 4.7, 130.8, 4.7, 131.0, 6.9, 131.1, 4.4}T • vnitřní síly na koncích jednotlivých prutů
Prut č. 1 2 3 4 5 6 7 Nab [kN] -299,67 -699,87 -500,11 -300,04 7,41 33,21 8,79
Vab [kN] 65,91 29,29 -21,92 -7,29 0,00 0,00 0,00
Mab [kNm] 0,00 0,00 0,00 0,00 0,00 0,00 0,00
Nba [kN] -299,67 -699,87 -500,11 -300,04 7,41 33,21 8,79
Vba [kN] 65,91 29,29 -21,92 -7,29 0,00 0,00 0,00
Mba [kNm] 434,41 355,09 0,00 0,00 0,00 0,00 0,00
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 18 -
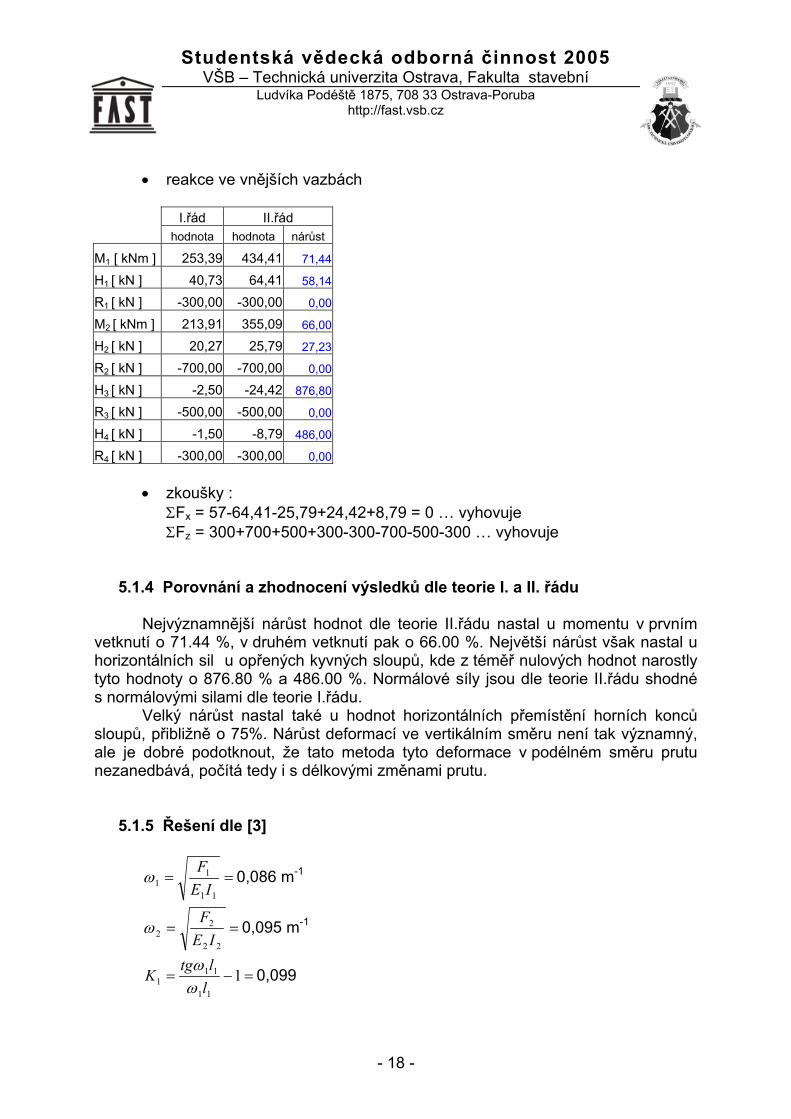
• reakce ve vnějších vazbách
I.řád II.řád hodnota hodnota nárůst
M1 [ kNm ] 253,39 434,41 71,44
H1 [ kN ] 40,73 64,41 58,14
R1 [ kN ] -300,00 -300,00 0,00
M2 [ kNm ] 213,91 355,09 66,00
H2 [ kN ] 20,27 25,79 27,23
R2 [ kN ] -700,00 -700,00 0,00
H3 [ kN ] -2,50 -24,42 876,80
R3 [ kN ] -500,00 -500,00 0,00
H4 [ kN ] -1,50 -8,79 486,00
R4 [ kN ] -300,00 -300,00 0,00
• zkoušky : ΣFx = 57-64,41-25,79+24,42+8,79 = 0 … vyhovuje ΣFz = 300+700+500+300-300-700-500-300 … vyhovuje
5.1.4 Porovnání a zhodnocení výsledků dle teorie I. a II. řádu
Nejvýznamnější nárůst hodnot dle teorie II.řádu nastal u momentu v prvním vetknutí o 71.44 %, v druhém vetknutí pak o 66.00 %. Největší nárůst však nastal u horizontálních sil u opřených kyvných sloupů, kde z téměř nulových hodnot narostly tyto hodnoty o 876.80 % a 486.00 %. Normálové síly jsou dle teorie II.řádu shodné s normálovými silami dle teorie I.řádu.
Velký nárůst nastal také u hodnot horizontálních přemístění horních konců sloupů, přibližně o 75%. Nárůst deformací ve vertikálním směru není tak významný, ale je dobré podotknout, že tato metoda tyto deformace v podélném směru prutu nezanedbává, počítá tedy i s délkovými změnami prutu.
5.1.5 Řešení dle [3]
==11
11 IE
Fω 0,086 m-1
==22
22 IE
Fω 0,095 m-1
=−= 111
111 l
ltgKωω 0,099
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 19 -
=−= 122
222 l
ltgKωω 0,348
• horizontální přemístění horních konců vetknutých sloupů 1 a 2
∑
∑
=
=
−
+
++==
4
3 1
1
11
1
2
1
2
1
1
2
4
121
1i
ii
i
i
lF
lKF
ll
KK
FF
Fla
EQWδδ = 130,93 mm
• ohybové momenty ve vetknutích sloupů 1, 2 ( )
=+
= 11
111
1 FKKM δ 434,28 kNm
( )=
+= 2
2
222
1 FKKM δ 354,99 kNm
• horizontální síly ve vetknutích sloupů 1,2
111
1111 F
lKKaH −
=δ = 64,33 kN
222
2222 F
lKKaH −
=δ = 25,76 kN
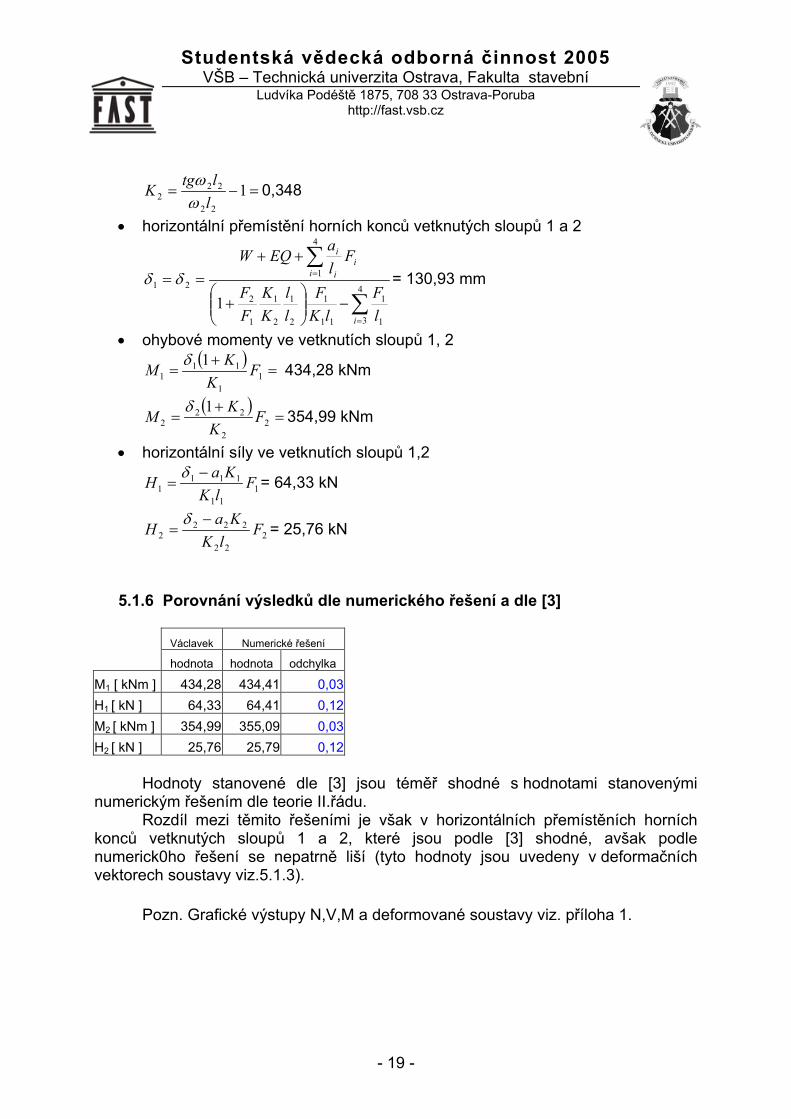
5.1.6 Porovnání výsledků dle numerického řešení a dle [3]
Václavek Numerické řešení
hodnota hodnota odchylka
M1 [ kNm ] 434,28 434,41 0,03H1 [ kN ] 64,33 64,41 0,12M2 [ kNm ] 354,99 355,09 0,03H2 [ kN ] 25,76 25,79 0,12
Hodnoty stanovené dle [3] jsou téměř shodné s hodnotami stanovenými
numerickým řešením dle teorie II.řádu. Rozdíl mezi těmito řešeními je však v horizontálních přemístěních horních
konců vetknutých sloupů 1 a 2, které jsou podle [3] shodné, avšak podle numerick0ho řešení se nepatrně liší (tyto hodnoty jsou uvedeny v deformačních vektorech soustavy viz.5.1.3).
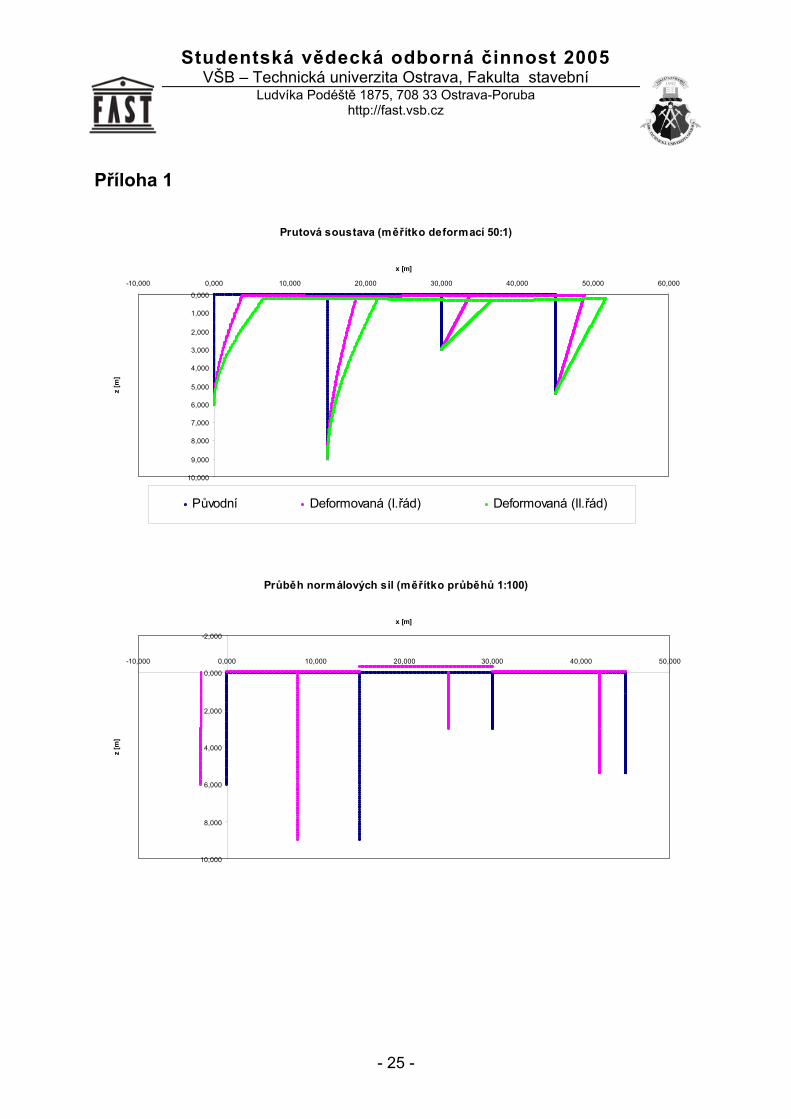
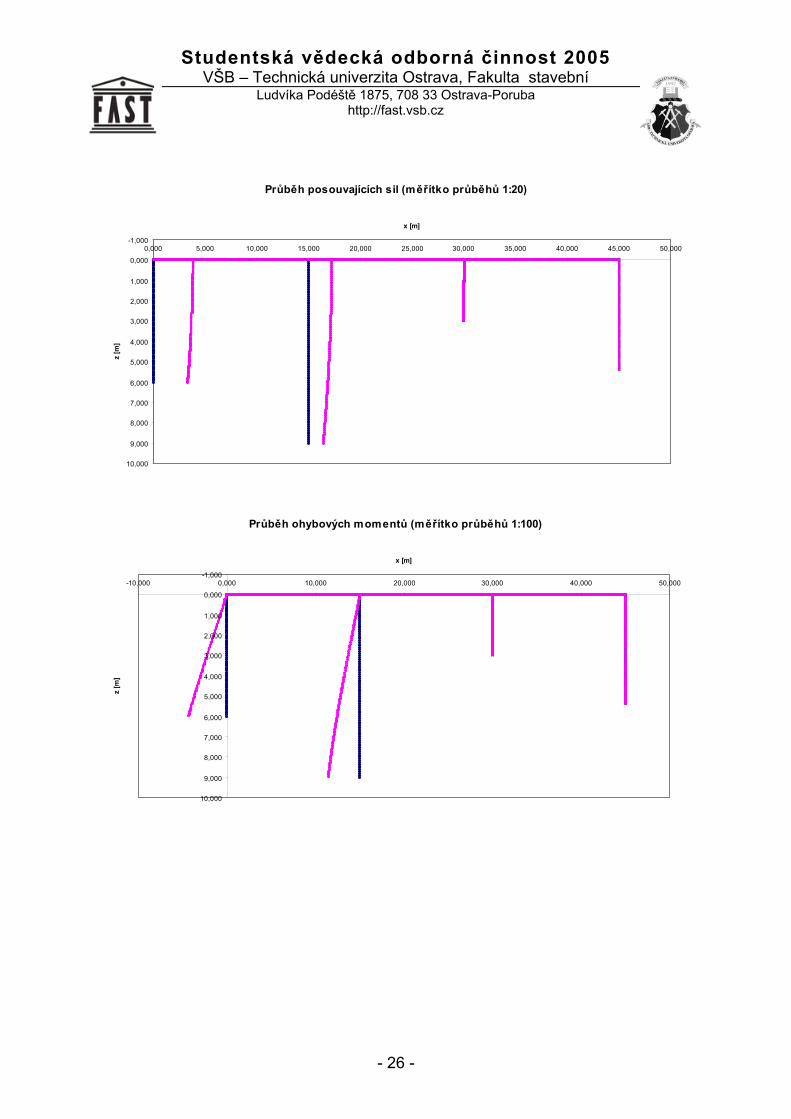
Pozn. Grafické výstupy N,V,M a deformované soustavy viz. příloha 1.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 20 -
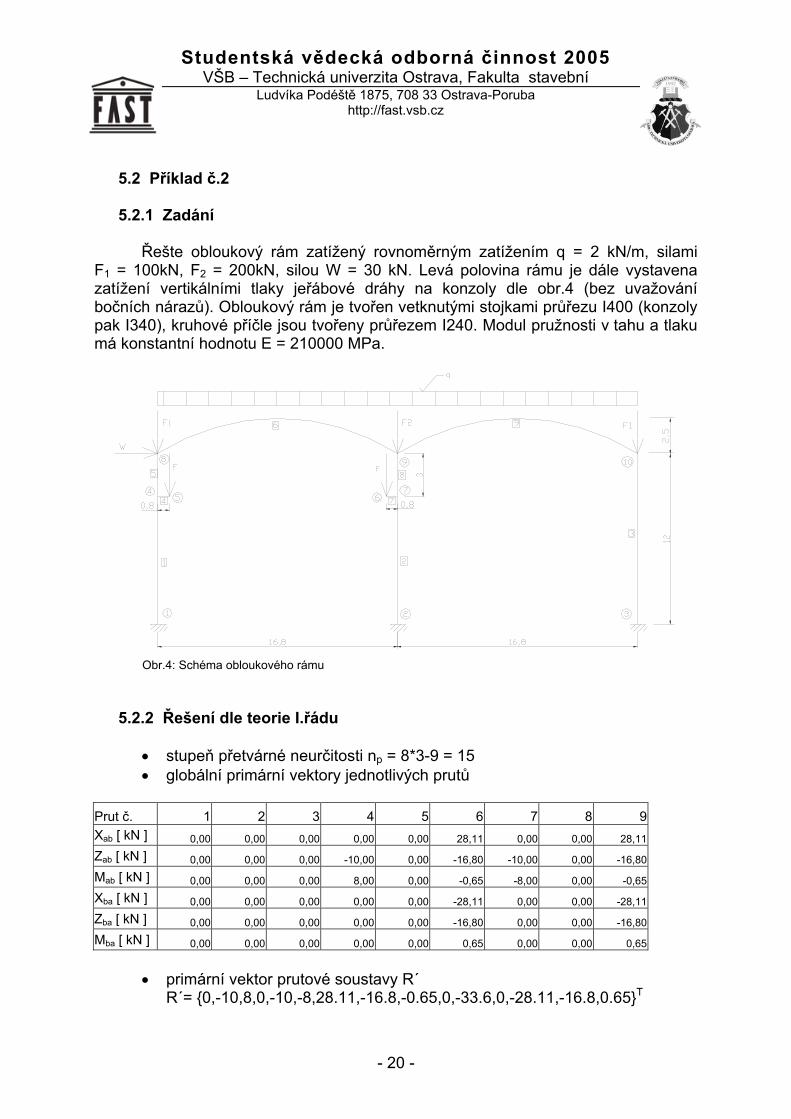
5.2 Příklad č.2 5.2.1 Zadání
Řešte obloukový rám zatížený rovnoměrným zatížením q = 2 kN/m, silami F1 = 100kN, F2 = 200kN, silou W = 30 kN. Levá polovina rámu je dále vystavena zatížení vertikálními tlaky jeřábové dráhy na konzoly dle obr.4 (bez uvažování bočních nárazů). Obloukový rám je tvořen vetknutými stojkami průřezu I400 (konzoly pak I340), kruhové příčle jsou tvořeny průřezem I240. Modul pružnosti v tahu a tlaku má konstantní hodnotu E = 210000 MPa.
Obr.4: Schéma obloukového rámu
5.2.2 Řešení dle teorie I.řádu
• stupeň přetvárné neurčitosti np = 8*3-9 = 15 • globální primární vektory jednotlivých prutů
Prut č. 1 2 3 4 5 6 7 8 9 Xab [ kN ] 0,00 0,00 0,00 0,00 0,00 28,11 0,00 0,00 28,11
Zab [ kN ] 0,00 0,00 0,00 -10,00 0,00 -16,80 -10,00 0,00 -16,80
Mab [ kN ] 0,00 0,00 0,00 8,00 0,00 -0,65 -8,00 0,00 -0,65
Xba [ kN ] 0,00 0,00 0,00 0,00 0,00 -28,11 0,00 0,00 -28,11
Zba [ kN ] 0,00 0,00 0,00 0,00 0,00 -16,80 0,00 0,00 -16,80
Mba [ kN ] 0,00 0,00 0,00 0,00 0,00 0,65 0,00 0,00 0,65
• primární vektor prutové soustavy R´
R´= {0,-10,8,0,-10,-8,28.11,-16.8,-0.65,0,-33.6,0,-28.11,-16.8,0.65}T
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 21 -
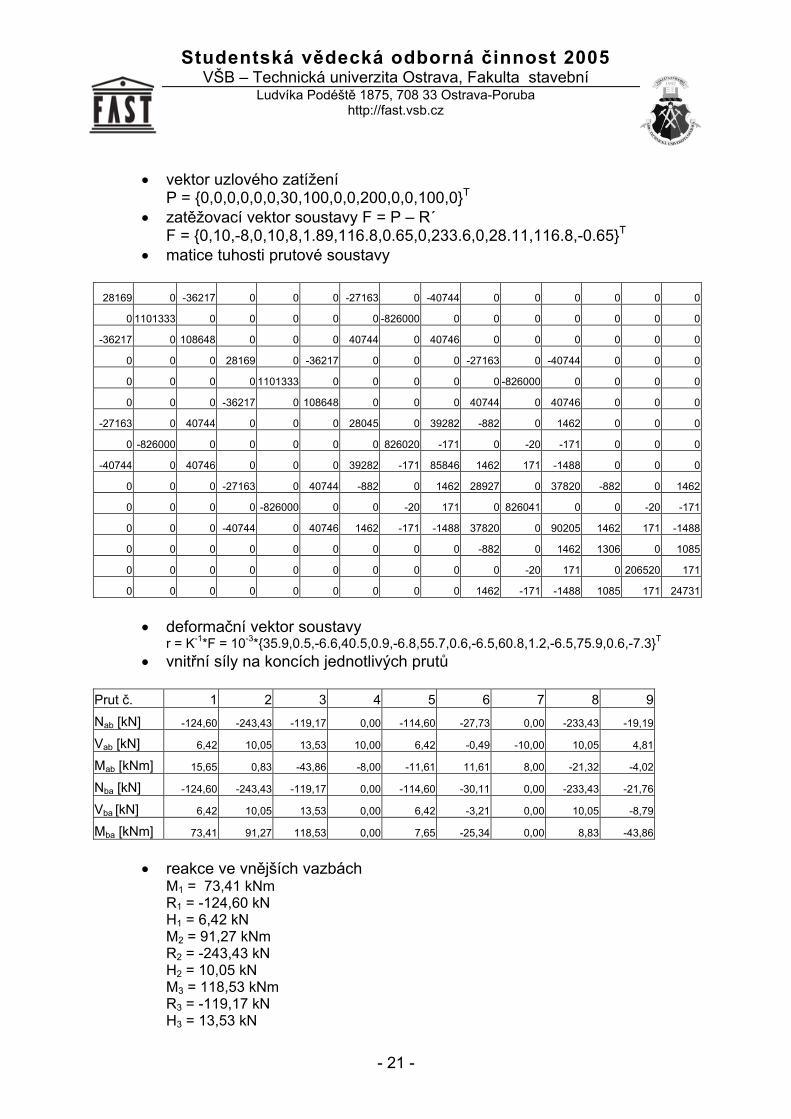
• vektor uzlového zatížení P = {0,0,0,0,0,0,30,100,0,0,200,0,0,100,0}T
• zatěžovací vektor soustavy F = P – R´ F = {0,10,-8,0,10,8,1.89,116.8,0.65,0,233.6,0,28.11,116.8,-0.65}T
• matice tuhosti prutové soustavy
28169 0 -36217 0 0 0 -27163 0 -40744 0 0 0 0 0 0
0 1101333 0 0 0 0 0 -826000 0 0 0 0 0 0 0
-36217 0 108648 0 0 0 40744 0 40746 0 0 0 0 0 0
0 0 0 28169 0 -36217 0 0 0 -27163 0 -40744 0 0 0
0 0 0 0 1101333 0 0 0 0 0 -826000 0 0 0 0
0 0 0 -36217 0 108648 0 0 0 40744 0 40746 0 0 0
-27163 0 40744 0 0 0 28045 0 39282 -882 0 1462 0 0 0
0 -826000 0 0 0 0 0 826020 -171 0 -20 -171 0 0 0
-40744 0 40746 0 0 0 39282 -171 85846 1462 171 -1488 0 0 0
0 0 0 -27163 0 40744 -882 0 1462 28927 0 37820 -882 0 1462
0 0 0 0 -826000 0 0 -20 171 0 826041 0 0 -20 -171
0 0 0 -40744 0 40746 1462 -171 -1488 37820 0 90205 1462 171 -1488
0 0 0 0 0 0 0 0 0 -882 0 1462 1306 0 1085
0 0 0 0 0 0 0 0 0 0 -20 171 0 206520 171
0 0 0 0 0 0 0 0 0 1462 -171 -1488 1085 171 24731
• deformační vektor soustavy
r = K-1*F = 10-3*{35.9,0.5,-6.6,40.5,0.9,-6.8,55.7,0.6,-6.5,60.8,1.2,-6.5,75.9,0.6,-7.3}T • vnitřní síly na koncích jednotlivých prutů
Prut č. 1 2 3 4 5 6 7 8 9 Nab [kN] -124,60 -243,43 -119,17 0,00 -114,60 -27,73 0,00 -233,43 -19,19
Vab [kN] 6,42 10,05 13,53 10,00 6,42 -0,49 -10,00 10,05 4,81
Mab [kNm] 15,65 0,83 -43,86 -8,00 -11,61 11,61 8,00 -21,32 -4,02
Nba [kN] -124,60 -243,43 -119,17 0,00 -114,60 -30,11 0,00 -233,43 -21,76
Vba [kN] 6,42 10,05 13,53 0,00 6,42 -3,21 0,00 10,05 -8,79
Mba [kNm] 73,41 91,27 118,53 0,00 7,65 -25,34 0,00 8,83 -43,86
• reakce ve vnějších vazbách
M1 = 73,41 kNm R1 = -124,60 kN H1 = 6,42 kN M2 = 91,27 kNm R2 = -243,43 kN H2 = 10,05 kN M3 = 118,53 kNm R3 = -119,17 kN H3 = 13,53 kN
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 22 -
• zkoušky : ΣFx = 6,42+10,05+13,53-30 = 0 … vyhovuje ΣFz = 100+200+100+2*33,6+10+10-124,6-243,43-119,17 = 0 … vyhovuje
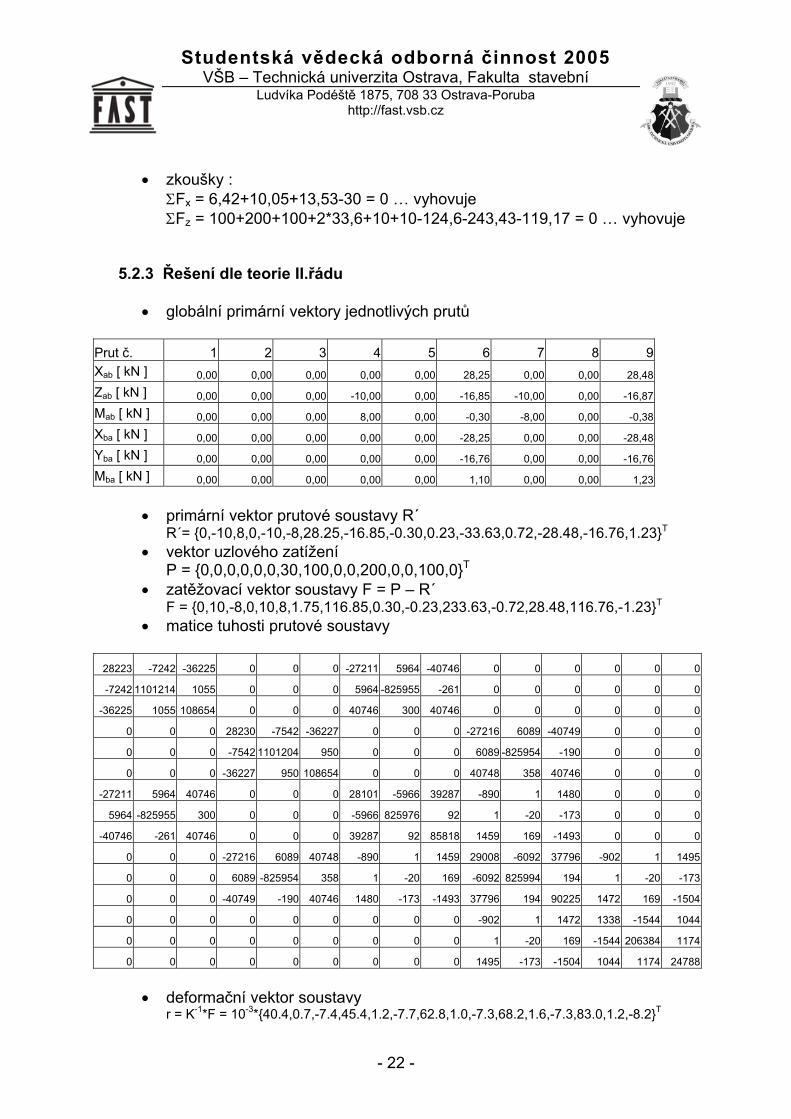
5.2.3 Řešení dle teorie II.řádu • globální primární vektory jednotlivých prutů
Prut č. 1 2 3 4 5 6 7 8 9 Xab [ kN ] 0,00 0,00 0,00 0,00 0,00 28,25 0,00 0,00 28,48
Zab [ kN ] 0,00 0,00 0,00 -10,00 0,00 -16,85 -10,00 0,00 -16,87
Mab [ kN ] 0,00 0,00 0,00 8,00 0,00 -0,30 -8,00 0,00 -0,38
Xba [ kN ] 0,00 0,00 0,00 0,00 0,00 -28,25 0,00 0,00 -28,48
Yba [ kN ] 0,00 0,00 0,00 0,00 0,00 -16,76 0,00 0,00 -16,76
Mba [ kN ] 0,00 0,00 0,00 0,00 0,00 1,10 0,00 0,00 1,23
• primární vektor prutové soustavy R´
R´= {0,-10,8,0,-10,-8,28.25,-16.85,-0.30,0.23,-33.63,0.72,-28.48,-16.76,1.23}T • vektor uzlového zatížení
P = {0,0,0,0,0,0,30,100,0,0,200,0,0,100,0}T • zatěžovací vektor soustavy F = P – R´
F = {0,10,-8,0,10,8,1.75,116.85,0.30,-0.23,233.63,-0.72,28.48,116.76,-1.23}T • matice tuhosti prutové soustavy
28223 -7242 -36225 0 0 0 -27211 5964 -40746 0 0 0 0 0 0
-7242 1101214 1055 0 0 0 5964 -825955 -261 0 0 0 0 0 0
-36225 1055 108654 0 0 0 40746 300 40746 0 0 0 0 0 0
0 0 0 28230 -7542 -36227 0 0 0 -27216 6089 -40749 0 0 0
0 0 0 -7542 1101204 950 0 0 0 6089 -825954 -190 0 0 0
0 0 0 -36227 950 108654 0 0 0 40748 358 40746 0 0 0
-27211 5964 40746 0 0 0 28101 -5966 39287 -890 1 1480 0 0 0
5964 -825955 300 0 0 0 -5966 825976 92 1 -20 -173 0 0 0
-40746 -261 40746 0 0 0 39287 92 85818 1459 169 -1493 0 0 0
0 0 0 -27216 6089 40748 -890 1 1459 29008 -6092 37796 -902 1 1495
0 0 0 6089 -825954 358 1 -20 169 -6092 825994 194 1 -20 -173
0 0 0 -40749 -190 40746 1480 -173 -1493 37796 194 90225 1472 169 -1504
0 0 0 0 0 0 0 0 0 -902 1 1472 1338 -1544 1044
0 0 0 0 0 0 0 0 0 1 -20 169 -1544 206384 1174
0 0 0 0 0 0 0 0 0 1495 -173 -1504 1044 1174 24788
• deformační vektor soustavy
r = K-1*F = 10-3*{40.4,0.7,-7.4,45.4,1.2,-7.7,62.8,1.0,-7.3,68.2,1.6,-7.3,83.0,1.2,-8.2}T
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 23 -
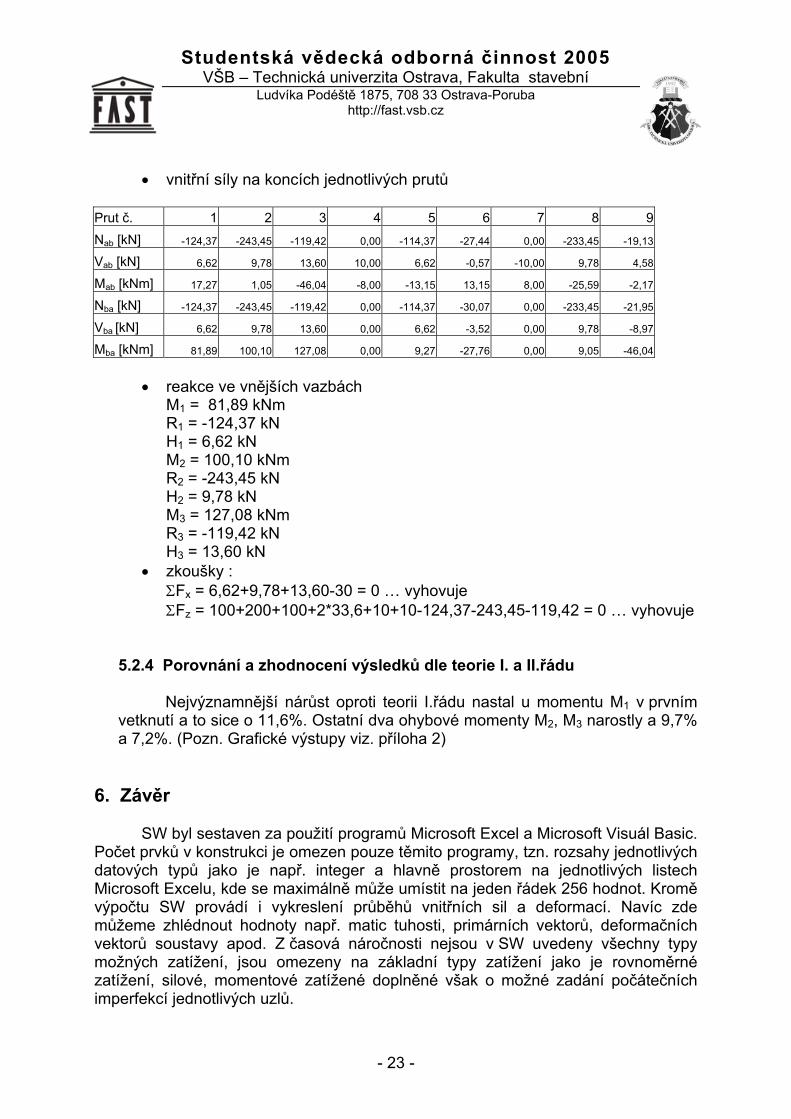
• vnitřní síly na koncích jednotlivých prutů
Prut č. 1 2 3 4 5 6 7 8 9 Nab [kN] -124,37 -243,45 -119,42 0,00 -114,37 -27,44 0,00 -233,45 -19,13
Vab [kN] 6,62 9,78 13,60 10,00 6,62 -0,57 -10,00 9,78 4,58
Mab [kNm] 17,27 1,05 -46,04 -8,00 -13,15 13,15 8,00 -25,59 -2,17
Nba [kN] -124,37 -243,45 -119,42 0,00 -114,37 -30,07 0,00 -233,45 -21,95
Vba [kN] 6,62 9,78 13,60 0,00 6,62 -3,52 0,00 9,78 -8,97
Mba [kNm] 81,89 100,10 127,08 0,00 9,27 -27,76 0,00 9,05 -46,04
• reakce ve vnějších vazbách
M1 = 81,89 kNm R1 = -124,37 kN H1 = 6,62 kN M2 = 100,10 kNm R2 = -243,45 kN H2 = 9,78 kN M3 = 127,08 kNm R3 = -119,42 kN H3 = 13,60 kN
• zkoušky : ΣFx = 6,62+9,78+13,60-30 = 0 … vyhovuje ΣFz = 100+200+100+2*33,6+10+10-124,37-243,45-119,42 = 0 … vyhovuje
5.2.4 Porovnání a zhodnocení výsledků dle teorie I. a II.řádu
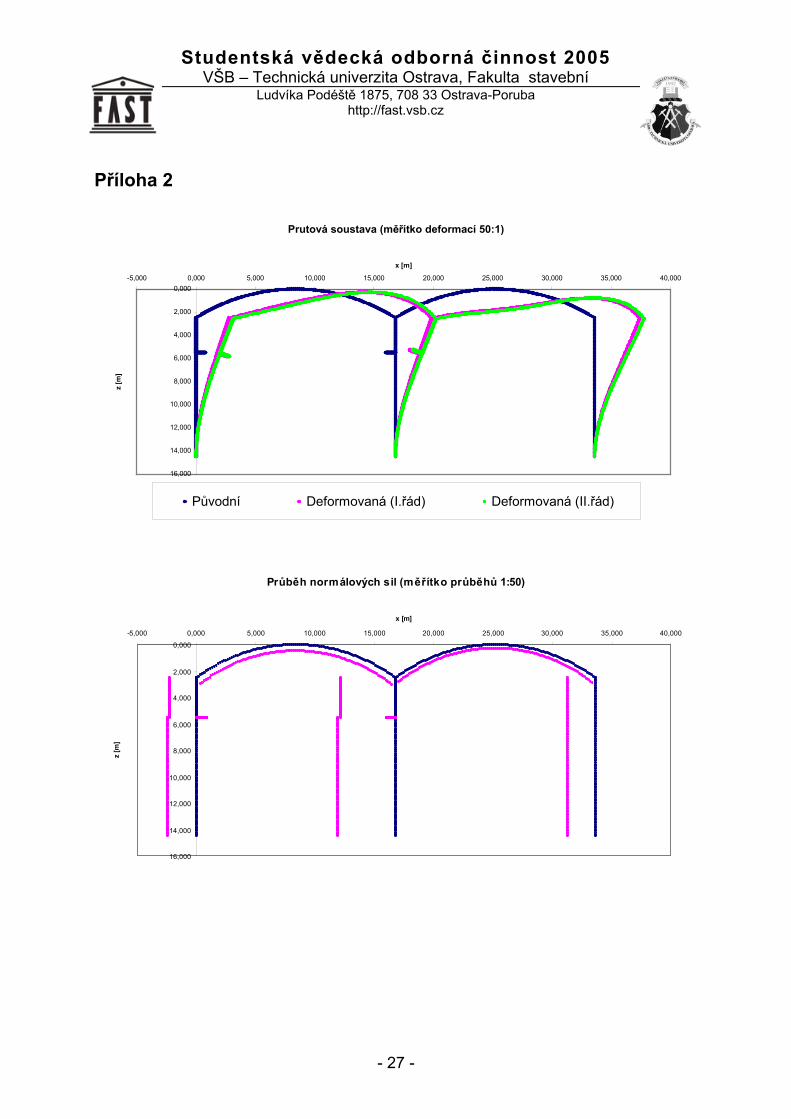
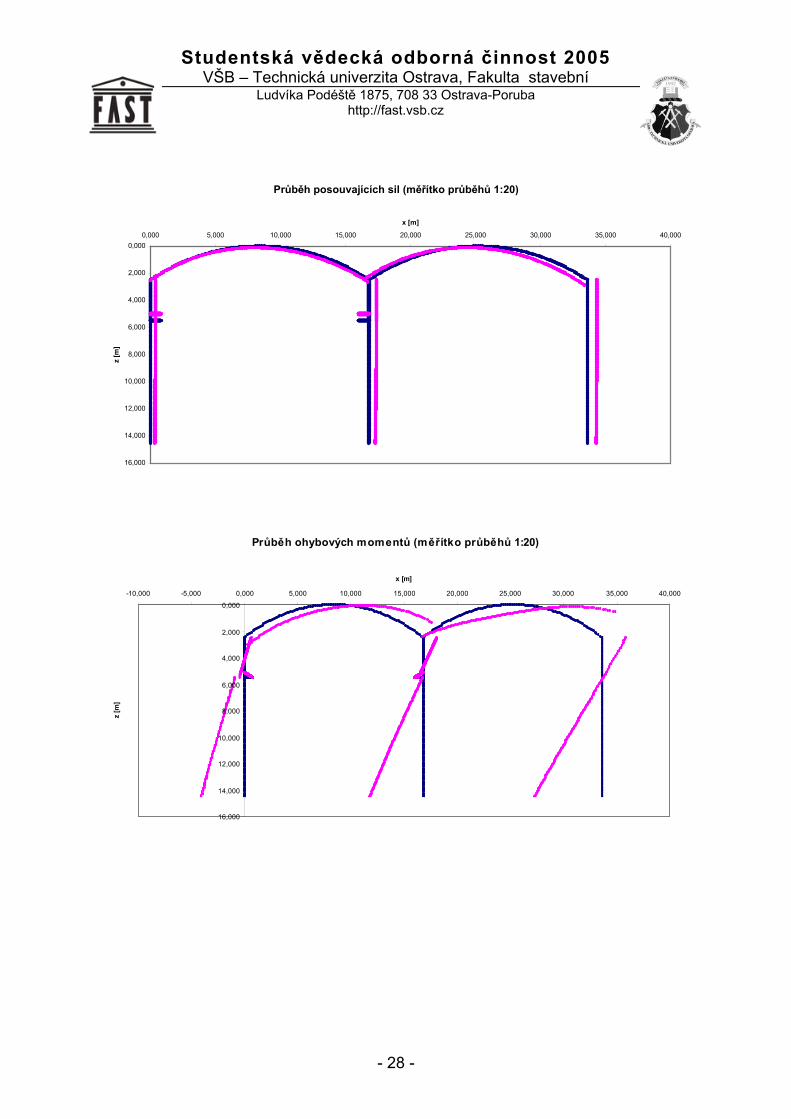
Nejvýznamnější nárůst oproti teorii I.řádu nastal u momentu M1 v prvním vetknutí a to sice o 11,6%. Ostatní dva ohybové momenty M2, M3 narostly a 9,7% a 7,2%. (Pozn. Grafické výstupy viz. příloha 2)
6. Závěr SW byl sestaven za použití programů Microsoft Excel a Microsoft Visuál Basic.
Počet prvků v konstrukci je omezen pouze těmito programy, tzn. rozsahy jednotlivých datových typů jako je např. integer a hlavně prostorem na jednotlivých listech Microsoft Excelu, kde se maximálně může umístit na jeden řádek 256 hodnot. Kromě výpočtu SW provádí i vykreslení průběhů vnitřních sil a deformací. Navíc zde můžeme zhlédnout hodnoty např. matic tuhosti, primárních vektorů, deformačních vektorů soustavy apod. Z časová náročnosti nejsou v SW uvedeny všechny typy možných zatížení, jsou omezeny na základní typy zatížení jako je rovnoměrné zatížení, silové, momentové zatížené doplněné však o možné zadání počátečních imperfekcí jednotlivých uzlů.
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 24 -
Použité materiály
Použitý software : Microsoft Excel Microsoft Visuál Basic
Použitá literatura : [1] Kadlčák J., Kytýr J.: Statika stavebních konstrukcí II, VUTIUM Brno 2001,
ISBN 80-214-1648-3 [2] Sobota J., Dický J.: Výpočtové metódy a algoritmy, STU Bratislava 1990,
ISBN 80-227-0387-7 [3] Václavek J., Marek P.: Posudek pravděpodobnosti poruchy ocelové nosné
konstrukce s přihlédnutím k montážním tolerancím, Konference spolehlivosti konstrukcí, Dům techniky Ostrava 2000, ISBN 80-02-01344-1
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 25 -
Příloha 1
Prutová soustava (měřítko deformací 50:1)
0,000
1,000
2,000
3,000
4,000
5,000
6,000
7,000
8,000
9,000
10,000
-10,000 0,000 10,000 20,000 30,000 40,000 50,000 60,000
x [m]
z [m
]
Původní Deformovaná (I.řád) Deformovaná (II.řád)
Průběh normálových sil (měřítko průběhů 1:100)
-2,000
0,000
2,000
4,000
6,000
8,000
10,000
-10,000 0,000 10,000 20,000 30,000 40,000 50,000
x [m]
z [m
]
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 26 -
Průběh posouvajících sil (měřítko průběhů 1:20)
-1,000
0,000
1,000
2,000
3,000
4,000
5,000
6,000
7,000
8,000
9,000
10,000
0,000 5,000 10,000 15,000 20,000 25,000 30,000 35,000 40,000 45,000 50,000
x [m]
z [m
]
Průběh ohybových momentů (měřítko průběhů 1:100)
-1,000
0,000
1,000
2,000
3,000
4,000
5,000
6,000
7,000
8,000
9,000
10,000
-10,000 0,000 10,000 20,000 30,000 40,000 50,000
x [m]
z [m
]
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 27 -
Příloha 2
Prutová soustava (měřítko deformací 50:1)
0,000
2,000
4,000
6,000
8,000
10,000
12,000
14,000
16,000
-5,000 0,000 5,000 10,000 15,000 20,000 25,000 30,000 35,000 40,000
x [m]
z [m
]
Původní Deformovaná (I.řád) Deformovaná (II.řád)
Průběh normálových sil (měřítko průběhů 1:50)
0,000
2,000
4,000
6,000
8,000
10,000
12,000
14,000
16,000
-5,000 0,000 5,000 10,000 15,000 20,000 25,000 30,000 35,000 40,000
x [m]
z [m
]
Studentská vědecká odborná činnost 2005 VŠB – Technická univerzita Ostrava, Fakulta stavební
Ludvíka Podéště 1875, 708 33 Ostrava-Poruba http://fast.vsb.cz
- 28 -
Průběh posouvajících sil (měřítko průběhů 1:20)
0,000
2,000
4,000
6,000
8,000
10,000
12,000
14,000
16,000
0,000 5,000 10,000 15,000 20,000 25,000 30,000 35,000 40,000
x [m]
z [m
]
Průběh ohybových momentů (měřítko průběhů 1:20)
0,000
2,000
4,000
6,000
8,000
10,000
12,000
14,000
16,000
-10,000 -5,000 0,000 5,000 10,000 15,000 20,000 25,000 30,000 35,000 40,000
x [m]
z [m
]