safespot project sp2 wp3 1 title s. marco (csst) – budapest, april 26 th 2007 sp2 - infrasens wp3...
TRANSCRIPT

1SAFESPOT Project SP2 WP3
Title
S. Marco (CSST) – Budapest, April 26th 2007
SP2 - INFRASENSSP2 - INFRASENSWP3 - System SpecificationsWP3 - System SpecificationsTask 2 - Detection AlgorithmsTask 2 - Detection Algorithms
EExtended xtended CCooperative ooperative AAutomatic utomatic IIncident ncident DDetectionetection
2SAFESPOT Project SP2 WP3
Basic principle
Detection of a sudden alteration in the flow by the collaboration of two Incident Detection algorithms (DUTCH, DIDX) based on traffic measurements; an alarm is flagged when there is symptomatic evidence of an abrupt traffic disruption, with the aim of preventing from (further) collisions.
The system will be implemented on motorways
Traffic data resulting from the fusion of real-time measurements acquired by infrastructure-based sensors and by vehicles travelling through the monitored area will be processed
2 steps of implementation:
1) traffic data come from the fixed sensors only
2) traffic density and speed are calculated starting from the positioning and speed of the probe vehicles
EExtended xtended CCooperative ooperative AAutomatic utomatic IIncident ncident DDetectionetection
3SAFESPOT Project SP2 WP3
Input data
The two inputs for the incident detection system are the average traffic speed (V) and density (D) values along the monitored portion of network
The values are averaged over single portions of road, ideally distinct per each single lane. The single portions of road over which the traffic data will be available are named sections. The traffic data will be calculated with a frequency of some seconds (“time step”)
The values of speed and density are processed in their time evolution (k time step vs. k-1) and space distribution (section i vs. i-1)

4SAFESPOT Project SP2 WP3
Input data – fixed sensors (1/2)
the traffic data are assumed to come from the fixed sensors only:
• the fixed sensors are densely distributed along the monitored portion of network (spot) with a spatial discretization of approximately 50 meters > this will be the length of the single section
• the traffic data per lane • the sensors coverage is of the order of the spot size (some hundreds
of metres), unless a wider coverage is planned at IP level• the sensors are able to provide:
• count of the vehicles in time (traffic flow [veic/h])• either the instantaneous vehicles average speed [km/h] or the
section occupancy [%].• the traffic density is calculated from the average traffic speed
and the traffic flow through the fundamental speed-flow-density relation
the benefit of having reduced “traffic” sections compared to traditional loop-based systems is evaluated (50 meters vs. 2 km approx.)
1st step
with the assumption that:

5SAFESPOT Project SP2 WP3
Input data – fixed sensors (2/2)
sectionFixed sensors
50m
spot
Vehicles counting
Section occupancy
Vehicles speed?
Section density
Section avg. speed
6SAFESPOT Project SP2 WP3
Input data – probe vehicles as sensors (1/3)
the average traffic density and speed for each section are calculated starting from the positioning and speed data sent by the probe vehicles
In this case, the ECAID needs that the position of each vehicle is associated to a certain section of the monitored road through a map-matching process
The number of vehicles driving on each section in a certain time step is used to calculate the traffic density of that section, while the instantaneous speed of the same vehicles is properly averaged in order to obtain the section traffic speed of the same section (harmonic average)
2nd step

7SAFESPOT Project SP2 WP3
Input data – probe vehicles as sensors (2/3)
The assumption is to have a spatial coverage of measures longer than the spot. This could be ensured by a WSN system made of nodes with receiving capability, i.e. able to capture the position and speed signal sent by the vehicles, and a propagation capability, i.e. able to “multihop” the information to the next RSU
In case also a sensing capability is available for the nodes, able to perform the vehicle counting, this data will be used for the real-time verification of the probe vehicle rate (see next - “fleet dimensioning”)
section
nodesInfrastructured spot
Fixed sensors
RSU

8SAFESPOT Project SP2 WP3
Input data – probe vehicles as sensors (3/3)
In case the speed and density data requested by the ECAID are available from both infrastructure and vehicle platforms, a proper data fusion process shall be run in order to calculate a unique value
Where the traffic data are not available from direct traffic measurements, the traffic state can be estimated through modelling techniques
The sections used for the traffic data aggregation will lie on the shapefile line elements composing the LDM static layer; the sections will be properly defined and referenced as to be located over the LDM network.
LDM shapefile line element
section
nodeInfrastructured spot
Fixed sensors
9SAFESPOT Project SP2 WP3
Output data
Incident event, with location section and time step (exchange standard format for event to be shared. E.g. Datex?..)
The output data will serve:
• SP5 applications “Speed Alert” and “Hazard and Incident Warning”
• SP4 applications “Rear End Collision”, “Speed Limitation and Safety Distance”, “Frontal Collision Warning” (to be confirmed by SP4)

10SAFESPOT Project SP2 WP3
Algorithms details
The two anomaly detection algorithms to be implemented operate in parallel:
• the Dutch algorithm, which analyses the single sensors station data, uses an exponential filter on the single lane speed and works with a threshold logic
• the DIDX, which works out the analysis on a discontinuity index of the traffic characteristics speed and density.
The individual alarms generated by the single algorithms will then be treated by an integration module that will generate the actual “incident flag”.
11SAFESPOT Project SP2 WP3
Algorithms details: Dutch
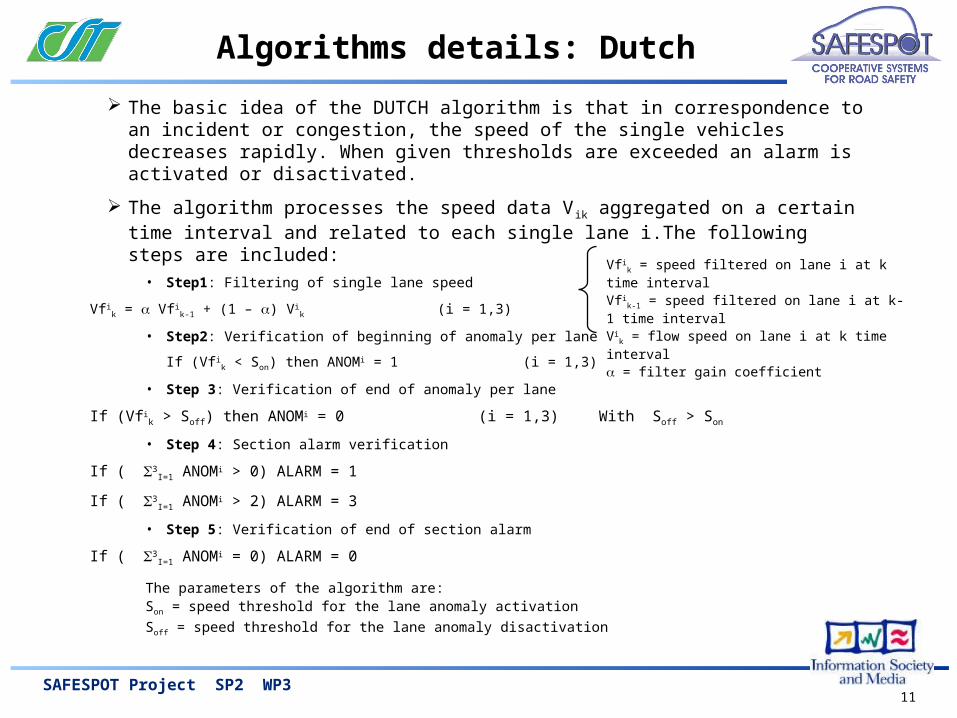
The basic idea of the DUTCH algorithm is that in correspondence to an incident or congestion, the speed of the single vehicles decreases rapidly. When given thresholds are exceeded an alarm is activated or disactivated.
The algorithm processes the speed data Vik aggregated on a certain time interval and related to each single lane i.The following steps are included:
• Step1: Filtering of single lane speed
Vfik = Vfi
k-1 + (1 – ) Vik (i = 1,3)
• Step2: Verification of beginning of anomaly per lane
If (Vfik < Son) then ANOMi = 1 (i = 1,3)
• Step 3: Verification of end of anomaly per lane
If (Vfik > Soff) then ANOMi = 0 (i = 1,3) With Soff > Son
• Step 4: Section alarm verification
If ( 3I=1 ANOMi > 0) ALARM = 1
If ( 3I=1 ANOMi > 2) ALARM = 3
• Step 5: Verification of end of section alarm
If ( 3I=1 ANOMi = 0) ALARM = 0
The parameters of the algorithm are:Son = speed threshold for the lane anomaly activation
Soff = speed threshold for the lane anomaly disactivation
Vfik = speed filtered on lane i at k time interval
Vfik-1 = speed filtered on lane i at k-1 time interval
Vik = flow speed on lane i at k time interval
= filter gain coefficient

12SAFESPOT Project SP2 WP3
Algorithms details: DIDX (1/2)
The DIDX algorithm is an original development of CSST. The basic idea is the consideration that, especially in heavy traffic conditions, an incident or congestion produce a perturbation to traffic speed and density. This will affect both the section (i) upstream of the point where the congestion originated and downstream (i+1), as shown below:
Based on this consideration, the following discontinuity index is proposed:
DI i i+1 = [(V0-Vi)/V0)2 + (Di/Dmax)2 ] ½ - [(V0-Vi+1)/V0)2 + (Di+1/Dmax)2 ] ½
Considering that, when an incident occurs, the density generally increases upstream and decreases downstream, while speeds increase downstream and decrease upstream, the indicator will have larger values downstream and smaller ones upstream.
V0 = speed at 0 traffic volume
Vi = avg carriageway speed at sect. i (Km/h)
Dmax = maximum carriageway density (V/km)
Di = max carriageway density at sect. i (V/km)

13SAFESPOT Project SP2 WP3
Algorithms details: DIDX (2/2)
The algorithm works according to the following steps:
• Step 1: For all the sections, included between the i and i+1 sensors stations, the Dik i i+1 is
calculated at the k-th minute, using the real time traffic data.
DIki i+1 = [(V0-Vk
i)/V0)2 + (Dki/Dmax) 2 ] ½ - [(V0-Vk
i+1)/V0)2 + (Dki+1/Dmax) 2 ] ½
• Step 2a: Filtering of the carrageway flow Fk
Ffk = Ffk-1 + (1 – ) Fk
• Step 2b: Filtering of the absolute value of the discontinuity index DI i,i+1k,
DIfi,i+1 = DIfi,i+1k-1 + (1 – ) | DIi,i+1
k |
• Step 3: Verification of applicability of the algorithm (flows higher than threshold)
If (Ffik > Fso) then AFk
i = 1 else AFki = 0
• Step 4: Verification of overcome of discontinuity threshold SDI.
If (DIfik > SDI) then ASk
i = 1 else ASki = 0
• Step 5: Calculation of final alarm indicator.
ALki = AFk
i * ASki
Ffk = flow filtered at time step k.
Ffk-1 = flow filtered at time step k-1
Fk = flow at time step k.
= filter gain coefficient
DIfi,i+1k = discont. index filtered at sect. i,i+1 at time step k
DIfi,i+1k-1 = discont. index filtered at sect. i,i+1 at time step k+1
|DIi,i+1k| = abs. value of the discont. index at sect. i,i+1 at ts k
= filter gain coefficient

14SAFESPOT Project SP2 WP3
Fleet dimensioning
An important aspect is the calculation of the equipped vehicle rate needed to provide reliable data for different flow rate conditions and incident duration times. Two different approaches are proposed.
1. Fleet dimension as a function of the probability of detecting an event . Based on three hp: • the event happens randomly
• the vehicle encounters the event randomly
• a single slow down observation is not enough to decide if an anomaly/incident is present; it is needed to fix a number of confirmation measures of the event in the reference time int.
Determine the probab. p [%] to detect an incident on a section characterized by a flow rate q [veic/h] with an probe veh. rate pFC [%] in the time interval T with at least N confirmation observ.s.
2. Fleet dimension in order to guarantee a fixed confidence interval in the travel time measure:
• Confidence interval: int_conf_95 = 1.96 * / n1/2
• = st. dev. of the travel times provided by the n probe veh. in the T reference time int.
15SAFESPOT Project SP2 WP3
System performance statistics (1/3)
the performance of the AID algorithms varies as a function of some design, environmental and traffic parameters, such as:
• the spatial distribution of sensors
• the covered area
• the measures time step
• the different environmental conditions
• the geometric factors of the road
• the penetration rate of equipped vehicles
• the heterogeneity of vehicle fleet
• the incident duration
• the incident severity
• etc.
16SAFESPOT Project SP2 WP3
System performance statistics (2/3)
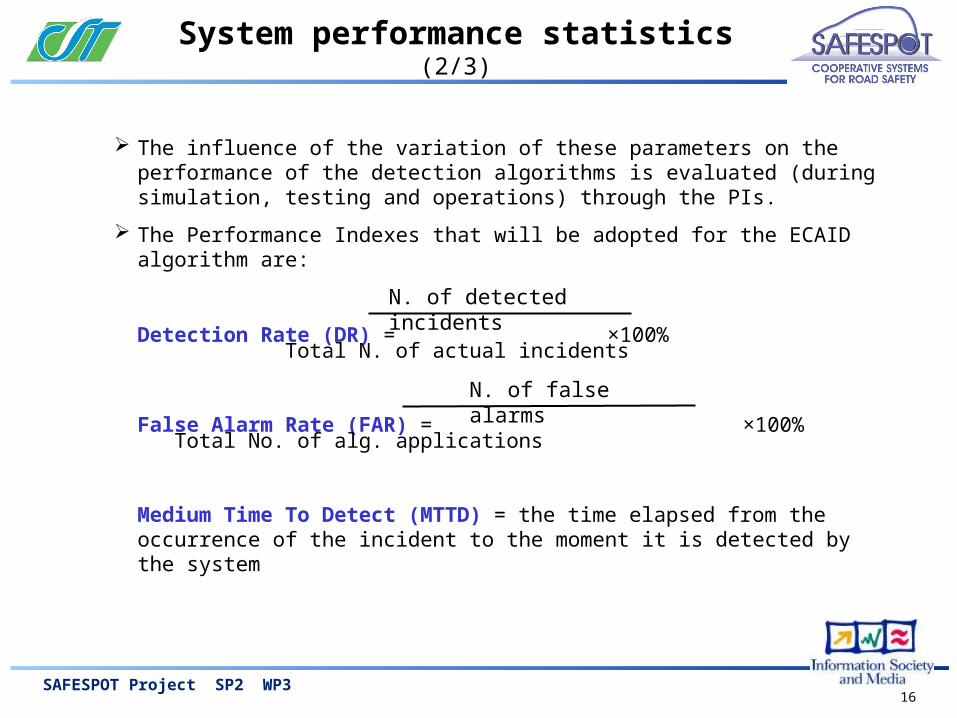
The influence of the variation of these parameters on the performance of the detection algorithms is evaluated (during simulation, testing and operations) through the PIs.
The Performance Indexes that will be adopted for the ECAID algorithm are:
Detection Rate (DR) = ×100% Total N. of actual incidents
False Alarm Rate (FAR) = ×100% Total No. of alg. applications
Medium Time To Detect (MTTD) = the time elapsed from the occurrence of the incident to the moment it is detected by the system
N. of detected incidents
N. of false alarms
17SAFESPOT Project SP2 WP3
System performance statistics (3/3)
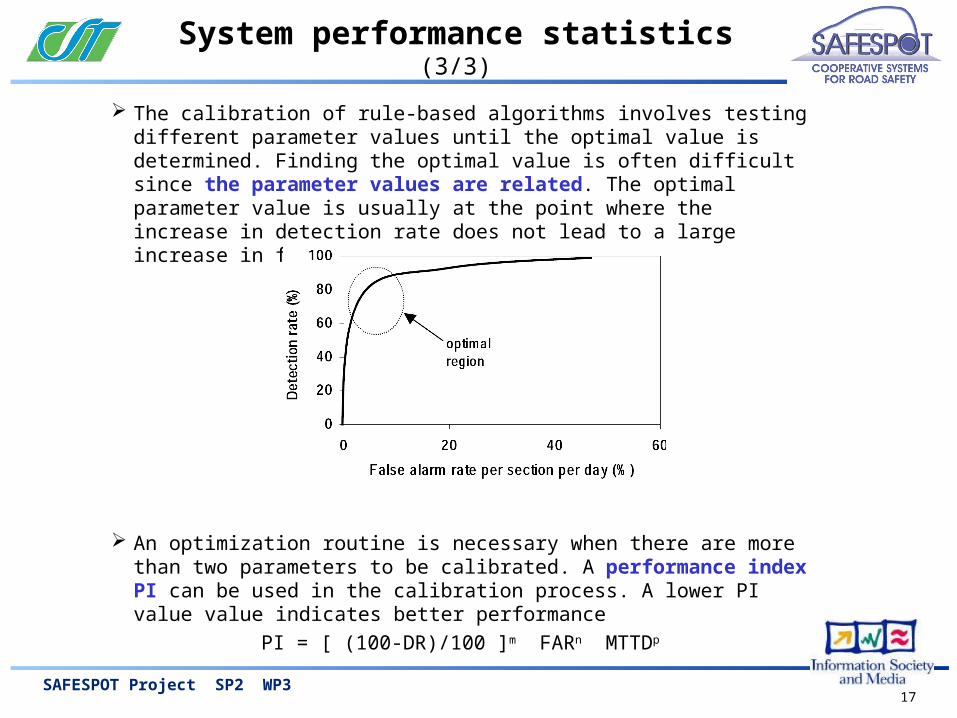
The calibration of rule-based algorithms involves testing different parameter values until the optimal value is determined. Finding the optimal value is often difficult since the parameter values are related. The optimal parameter value is usually at the point where the increase in detection rate does not lead to a large increase in false alarm rate.
An optimization routine is necessary when there are more than two parameters to be calibrated. A performance index PI can be used in the calibration process. A lower PI value value indicates better performance
PI = [ (100-DR)/100 ]m FARn MTTDp