simulation for development of chassis mechatronic systems
TRANSCRIPT

Simulation for Development of
Chassis Mechatronic Systems
May 3, 2016 VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS 1
Dr. Matthijs Klomp, Technical Specialist – Vehicle Dynamics CAE

• Vehicle Dynamics CAE @ Volvo Cars – Who are we and what do we do?• The software and electronics revolution in cars – what does it mean and how do
we meet these new challenges? (Spoiler #1: Simulation!)• Simulation – Implementation examples• Conclusions – (Spoiler #2: Simulation is necessary!)
agenda
May 3, 2016 2VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS

product development
May 3, 2016 3VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Obj. Vehicle Requirements
Sub-system Requirements
Component Requirements
Component Testing
Sub-system Testing
Objective Vehicle Testing
Subjective Vehicle Testing
Voice of Customer Market Acceptance
Component Design
Subj. Vehicle Requirements
Vehicle Level
System Level
Component Level

• Trends: Safe, Green & Convenient
• Common statement: ”More than 80 percent of automotive innovations are driven by electronics, and amongst them, 90 percent are supported by means of software.”
• What we see clearly is:• More vehicle variants in shorter time• Functional growth (exponential?) – e.g. autonomous drive
• How do we meet these challenges?
Our reality: Transformation in progress
May 3, 2016 4VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Functions
Software
Electronics
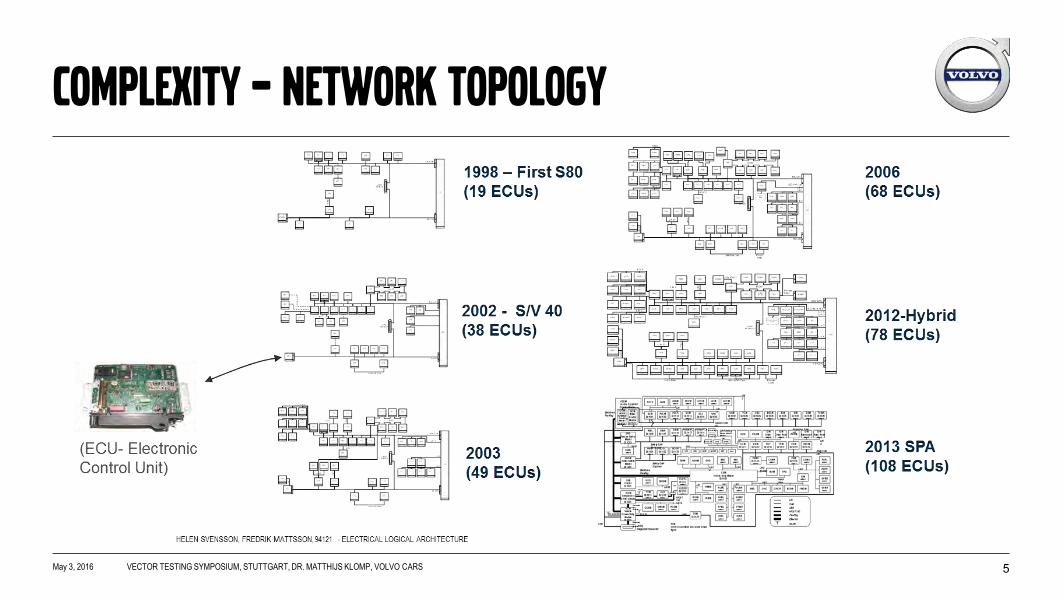
Complexity – network topology
May 3, 2016 VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS 5

• Enables testing of solutions before hardware is built• Enables fully automatic repeatable testing of real driving situations• Supports continuous integration of SW functional increments• Leverages computing power (n*24/7 versus 1*8/5)• Measure the immeasurable – all signals are available
Simulation as an enabler
May 3, 2016 6VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Pinpoint Decisions, Inc.

• Vision “Fully virtual vehicle dynamics development”
• Predict handling, steering & ride comfort
• Virtual tuning of tires
• Virtual tuning of suspension (springs, dampers, stabilizer bars, bushings, hard-points and structural stiffness of chassis & body)
• Virtual tuning of steering control (boost, damping, active return, path control, etc.)• Virtual tuning of brake control (yaw, side-slip and roll control)
• Focus on event based testing (1:1 equivalence to physical testing)
Vehicle Dynamics @ Volvo Cars
May 3, 2016 7VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS

System Analysis: suspension K&C
May 3, 2016 8VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS

Vehicle manuever: Parking Sweep 100°/s 10 km/h
May 3, 2016 9VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS

ISO 19634: Steady-State Constant Radius
May 3, 2016 10VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS

• Virtual Vehicle Architecture• Platform and infrastructure to virtually develop networked mechatronic system functions• Purpose driven fidelity of simulation models (plant and controller)• Purpose driven integration of simulation models (configuration)
• Unified models• Tool vendor independent models• Functional Mock-up Interface
• Purpose driven fidelity• Real-time online• Error controlled offline• Configuration in PLM system
Virtual vehicle architecture
May 3, 2016 11VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Gimbergsson & Törmänen, 2013
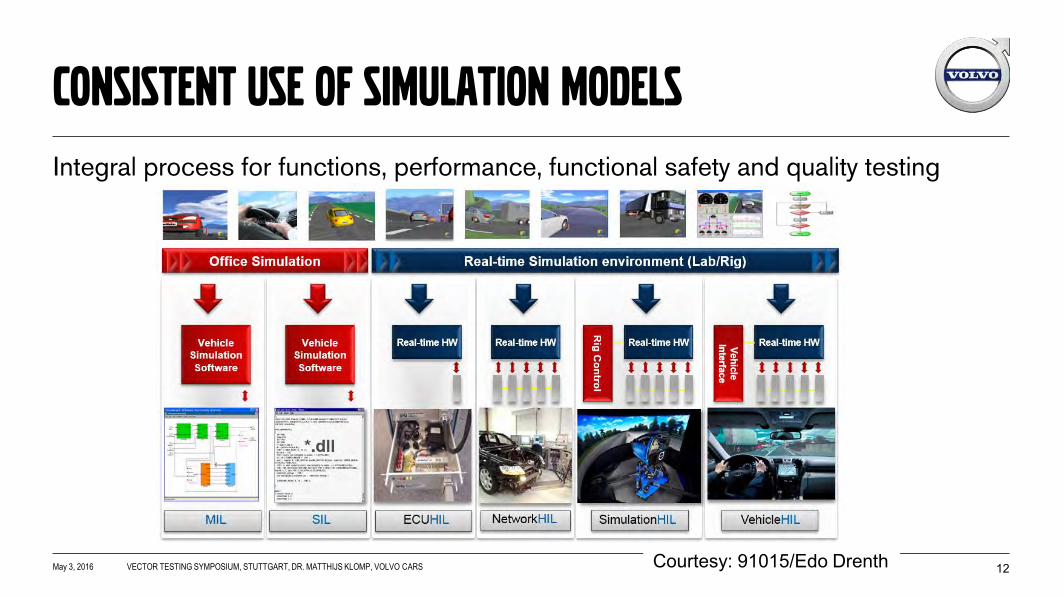
Integral process for functions, performance, functional safety and quality testing
Consistent Use of Simulation Models
May 3, 2016 12VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS Courtesy: 91015/Edo Drenth

• Structured (questions pre-defined)• Standard load-cases• Highly automated• Pre-defined variations
• Semi-structured (variations of questions)• Monte Carlo / DOE simulations• Stress test (automatically find error states)• Sensitivity studies
• Unstructured (ad-hoc questions)• Explorative testing (driving simulator, 24/7 off-line driving)• Random variations / fault injection• Visual inspection of data• Data mining (new questions on existing data)
Methods – test strategy
May 3, 2016 13VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Find & report issues
Propose solution
New/updated requirements and/or test methods

• Chassis Nodes• VDDM/BCM: Vehicle Dynamics Domain Master / Brake Control Module• PSCM: Power Steering Control Module• SUM: Suspension Control Module• SAS: Steering Angle Sensor
Vehicle dynamics domain
May 3, 2016 14VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Steering System Suspension SystemBrake System
Propulsion CAN HS

• In XC90 development:• Fault injection to test correct error handling and diagnostics• Test that functions are available and possible to activate• Test of software download and other production related features• Test of communication with other nodes in the car• System safety testing including end-to-end protected signaling
• Today and onwards:• Dynamic testing of vehicle dynamics functions• Dynamic long-time testing• Integration with driving simulator• Integration with steering system test-rig
Vehicle dynamics domain testing
May 3, 2016 15VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Steering System Rig
Moving Base Driving Simulator

Off-line steering system optimisation
16VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Electric Power Assist Steering System
Parameterization and Optimisation Employing
Computer-Aided Engineering
Marcus Ljungberg (VCG), Mikael Nybacka (KTH), Gaspar Gil Gómez (VCG) and Diomidis Katzourakis (VCG)SAE 2015 World Congress & Exhibition. 2015-01-1500, Steering and Suspension Technology Symposium
May 3, 2016

On-line steering system optimisation
May 3, 2016 17VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Calibration (INCA / CANape)
DoE / Optimization (ModeFrontier)
Vehicle & Rest-bus Simulation (CarMaker on DS1006)
Post-processing (Sympathy for Data)
Remote GUI Control via TCP/IP
StWhlAgStWhlTrq
Result file
Performance metricsProcess automation via COM
VehSpdTieRodFrc
XCP via CANTieRodPos
Steering System Verification Using
Hardware-in-the-Loop
Linköping University, Vehicular Systems Bjelevac, SalkoKarlsson, PeterISRN: LiTH-ISY-EX--15/4831--SE

• ECE/TRANS/WP.29/GRRF/2014/12: “Where a vehicle has been physically tested in accordance with paragraph 8., the compliance of versions or variants of that same vehicle type may be demonstrated by a computer simulation, which respects the test conditions of paragraph 8. and the test procedure of paragraph 9.9. The use of the simulator is defined in Annex 1 to this Regulation.”
Virtual homologation of ESC systems
May 3, 2016 18VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Source: www.cvel.clemson.edu

• S90 brake internal SW road release without physical prototypes
• Virtual homologation & steering in development
Virtual release of brake and steering systems
May 3, 2016 19VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Diomidis Katzourakis, Stavros Angelis, Matthijs Klomp, Albin Johnsson, Robert HanssonVirtual Brake Software Release
24th International Symposium on Dynamics of Vehicles on Roads and Tracks, August 17-21, 2015, Graz / Austria

• ECE regulation: “The simulated vehicle behaviour and operation of he vehicle stability function is comparable with that seen in practical vehicle tests.”
• Objective metrics on the validation the simulation model has been missing so far• Proposed standards:
• ISO/DIS 19364: Passenger cars -- Vehicle dynamic simulation and validation -- Steady-state circular driving behavior
• “If all [physical] tests lie within the boundaries [specified in the standard], then the simulation is considered valid for determining steady-state behaviour up to the limits in lateral acceleration covered in the testing.
• ISO/DIS 19365: Passenger cars -- Vehicle dynamic simulation and validation -- Sine with dwell stability control testing
• “If the number of the first test in each series in which ESC intervention occurs for physical testing matches the corresponding number for the first test in the simulated series ±1 as specified in 9.2.2, and the conditions specified in 9.3.3 are met for the three tests used for comparison (see 9.2.3), the simulation tool is considered valid for representing vehicle behaviour in the sine with dwell test.”
Validation of simulation models
May 3, 2016 20VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS

• Albert Einstein: “As simple as possible, but not simpler”• George Box: ”All models are wrong; the practical question is how wrong do they
have to be to not be useful” • Claude Rouelle: ”Make it useful before you make it complicated”
Model validity – accuracy vs usefulness
May 3, 2016 21VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Robert G. Sargent – “Verification and validation of simulation models” Proceedings of the 2011 Winter Simulation Conference

• Boundaries are based on Adams/Car data from ISO/DIS 19364
Example for steady-state circular driving
May 3, 2016 22VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
22
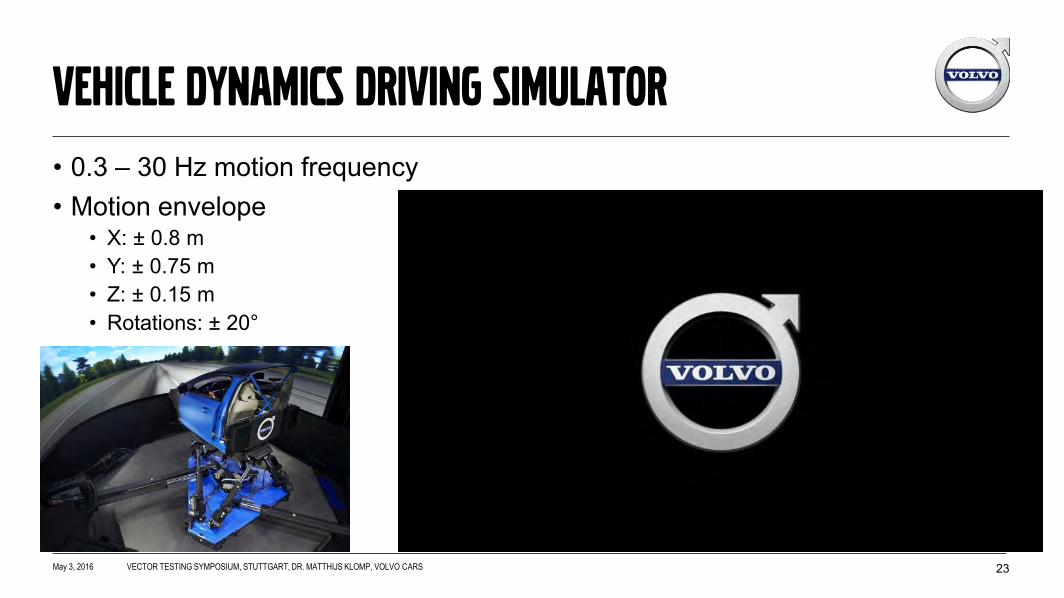
• 0.3 – 30 Hz motion frequency• Motion envelope
• X: ± 0.8 m• Y: ± 0.75 m• Z: ± 0.15 m• Rotations: ± 20°
Vehicle dynamics driving simulator
May 3, 2016 23VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS

Example 1: Suspension control & Driving Simulator
May 3, 2016 24VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Rest-bus & I/O Simulation (CANoe on VT System)
Measurement & Calibration (CANape)
Vehicle Simulation(Concurrent Linux64)
Suspension Control Module
FMI Coupling (FDX via Ethernet)
Driving Simulator
Chassis CAN 4xWhlPos [V]3xVertAcc [V] 4xDmprCrnt (A)
XCP via Measurement CAN
Cockpit & Motion Platform Variables (EtherCat)

May 3, 2016 25
Example 2: Brake control & Driving Simulator
VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
Concurrent
VT SystemRest Bus & I/O
CarRealTime
Vehicle Model
CAN(Chassis & Propuslion)
ethernet(UD
P)
SWA, VehSpd,brkpedpos
VDDM/BCM
Vacuum pump
Servo StWhlAg
StWhlTqcontroller BrkPedPosBrkpedpos (analog)
4x WhlSpd
FlexRay(Backbone)
Booster
Master
cylinder
Brakeclampingforce (4x)
J1962
Diagnostic Connector
Diagnostics
EthernetVCM
MCAL (INCA, CANape)
XCP on Ethernet
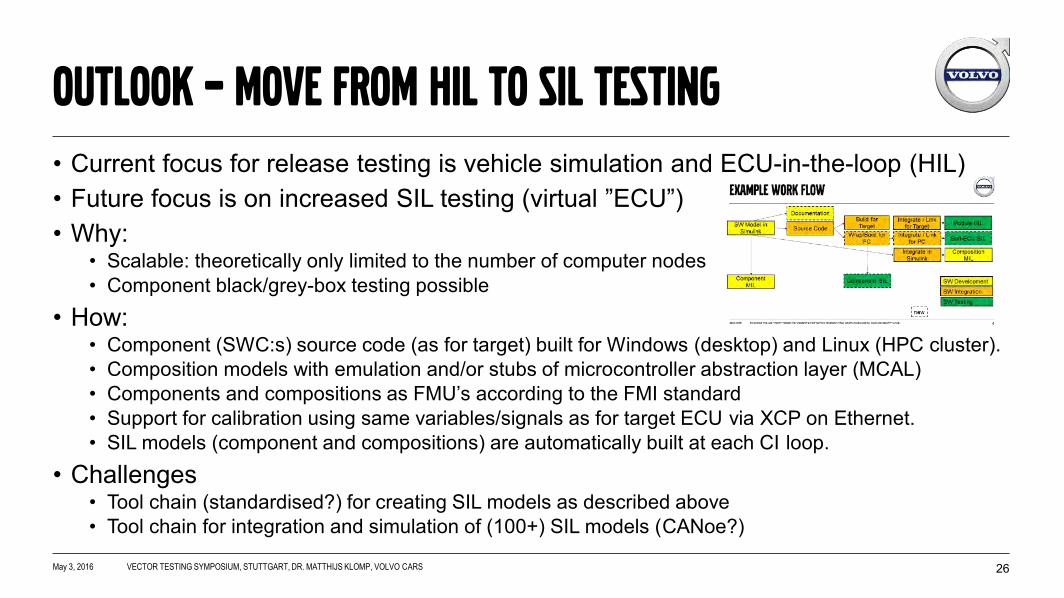
• Current focus for release testing is vehicle simulation and ECU-in-the-loop (HIL)• Future focus is on increased SIL testing (virtual ”ECU”)• Why:
• Scalable: theoretically only limited to the number of computer nodes• Component black/grey-box testing possible
• How:• Component (SWC:s) source code (as for target) built for Windows (desktop) and Linux (HPC cluster).• Composition models with emulation and/or stubs of microcontroller abstraction layer (MCAL)• Components and compositions as FMU’s according to the FMI standard• Support for calibration using same variables/signals as for target ECU via XCP on Ethernet.• SIL models (component and compositions) are automatically built at each CI loop.
• Challenges• Tool chain (standardised?) for creating SIL models as described above• Tool chain for integration and simulation of (100+) SIL models (CANoe?)
Outlook – Move from HIL to SIL Testing
May 3, 2016 26VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS
•Virtual development methods are required to meet the challenges of the future
•Unified / scalable simulation architecture in all phases of development (MIL, SIL, HIL)
•Leverage strengths of virtual development
conclusions
May 3, 2016 27VECTOR TESTING SYMPOSIUM, STUTTGART, DR. MATTHIJS KLOMP, VOLVO CARS