sistemi dinamici meccanici - dipartimento di …cardin/redux-nuovo.pdf · queste dispense sono solo...
TRANSCRIPT
Franco Cardin
SISTEMI DINAMICI MECCANICI
Introduzione alla Meccanica Razionale
per il corso di Fisica Matematica
Laurea triennale in Matematica 2016/17
J.L.Lagrange, Mecanique Analytique
Hamilton’s variation principle can be shown to correspond to Fermat’s Principle for a wave propagation in configuration space (q-space), and the Hamilton-Jacobi equation expresses Huygens’ Principle for this wave propagation. Unfortunately this powerful and momentous conception of Hamilton is deprived, in most modern reproductions, of its beautiful raiment as a superfluous accessory, in favour of a more colourless representation of the analytical correspondence.
E. Schroedinger, Quantization as a problem of eigenvalues, II
E. Schrodinger, Quantization as a problem of eigenvalues, II
Avvertenza per il Lettore
Queste dispense sono solo una traccia per un corso di Meccanica, non certo un trattatodi Meccanica.
I manuali di Meccanica sono altri: il lettore che s’appassionasse e desiderasse appro-fondire la materia e invitato a rivolgersi, esplorare le pagine dei bellissimi trattati di Levi-Civita & Amaldi, di Whittaker, di Wintner, di Landau & Lifshitz, di Gantmacher, di Arno-l’d, e poi ancora i piu recenti volumi di Benenti, Cercignani, Dell’Antonio, Fasano & Marmi,Gallavotti, ecc.
Queste note sono invece semplicemente un modo di raccontare alcuni, pochi, capitolidella Meccanica Classica, modo legato intimamente alla maturazione di tali argomenti,usufruendo dell’esperienza dell’insegnamento e della conseguente ‘risposta’ degli studenti,via via nel tempo.
Franco Cardin
Dipartimento di Matematica Tullio Levi-CivitaUniversita degli Studi di Padova
2

Indice
1 Sistemi Meccanici Vincolati 7
1.1 Fondamenti della Meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.1 Spazi Inerziali, Riferimenti Inerziali, Tempo Assoluto . . . . . . . . . 8
1.1.2 Punti materiali e masse . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.3 Spazio delle Configurazioni e Spazio degli Atti di Moto per un sistemadi punti materiali liberi . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.4 Forze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.5 Vincoli e loro descrizione geometrica . . . . . . . . . . . . . . . . . . 10
1.1.6 Vincoli e loro descrizione dinamica . . . . . . . . . . . . . . . . . . . 14
1.1.7 Moti Dinamicamente Possibili . . . . . . . . . . . . . . . . . . . . . 15
1.2 Quiete ed Equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3 Vincoli privi d’attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4 Un sistema meccanico la cui dinamica e retta dall’equazione differenzialex = f(x), con x ∈ R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4.1 Diagramma di Fase per x = f(x) . . . . . . . . . . . . . . . . . . . . 24
1.5 Metodo di Lagrange per la determinazione delle Reazioni Vincolari . . . . 27
1.6 Il modello di Coulomb dell’attrito . . . . . . . . . . . . . . . . . . . . . . . 30
1.7 Vincoli Lisci o Ideali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.8 Cinematica e dinamica elementare dei sistemi particellari . . . . . . . . . . 33
1.8.1 Equazioni Cardinali . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.8.2 Cinematica dei sistemi particellari rigidi . . . . . . . . . . . . . . . . 36
1.9 Teorema di Conservazione dell’Energia . . . . . . . . . . . . . . . . . . . . . 40
1.10 La restrizione di un sistema di forze conservativo e conservativa . . . . . . 41
1.11 Sistemi continui (di infinite particelle) a finiti gradi di liberta . . . . . . . . 42
1.12 Appendice: Il Principio di Gauss . . . . . . . . . . . . . . . . . . . . . . . 45
2 Il Problema dei Due Corpi e la Meccanica Celeste 49
2.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.2 Moti Piani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.3 Moti Centrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3

2.4 Formule di Binet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.5 Sulle Coniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.6 Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.7 Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.8 Massa Ridotta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.9 Soluzione del Problema Ridotto ad un Corpo, il Problema di Kepler . . . . 61
2.10 L’equazione di Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.11 Il Vettore di Runge-Lenz per il Problema di Kepler Spaziale . . . . . . . . . 67
2.12 Circonferenza di Hamilton delle velocita nel Problema di Kepler piano . . . 67
2.13 Teorema di Bohlin (nella versione di Faure-Arnol’d): Equivalenza orbitaledei potenziali elastico e Kepleriano . . . . . . . . . . . . . . . . . . . . . . . 68
2.14 Sulle soluzioni esatte del Problema a Tre Corpi ed N Corpi . . . . . . . . . 70
3 Teoria della Stabilita 75
3.1 Lyapunov Stabilita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.2 Stabilita Asintotica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3 Teorema di Lagrange-Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.4 Stabilizzazione Giroscopica . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.5 Equazioni Differenziali Lineari (richiamo) . . . . . . . . . . . . . . . . . . . 87
3.6 Linearizzazione attorno ad Equilibri Stabili . . . . . . . . . . . . . . . . . . 88
3.7 Primo Metodo di Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.8 Stabilita per Sistemi Dinamici infinito-dimensionali . . . . . . . . . . . . . . 91
3.9 La Teoria di Floquet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4 Meccanica di Lagrange 95
4.1 Dinamica dei Sistemi Olonomi Lisci: Equazioni di Lagrange . . . . . . . . . 95
4.2 Sugli Integrali Primi delle Equazioni di Lagrange . . . . . . . . . . . . . . . 101
4.3 Teoria di Routh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.4 Teoria di Noether . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5 Piccole Oscillazioni nei Sistemi Lagrangiani 109
6 Il Pendolo di Foucault: Appunti per lo studio del problema linearizzato113
7 Meccanica Elementare del Corpo Rigido 119
7.1 Il Corpo Rigido e un sistema vincolato a vincoli olonomi . . . . . . . . . . . 119
7.2 Il Corpo Rigido e un sistema vincolato a vincoli lisci . . . . . . . . . . . . . 120
7.3 Dinamica del Corpo Rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
7.4 Equazioni di Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
4

8 Calcolo delle Variazioni 131
8.1 Principio Variazionale di Hamilton . . . . . . . . . . . . . . . . . . . . . . . 131
8.2 Minimo nel Calcolo delle Variazioni: il Principio della Minima Azione . . . 134
8.3 Sinossi di Teoria Variazionale in H1 . . . . . . . . . . . . . . . . . . . . . . 139
8.4 Minimo Forte e Minimo Debole . . . . . . . . . . . . . . . . . . . . . . . . . 141
8.5 Moti spontanei e geodetiche su varieta . . . . . . . . . . . . . . . . . . . . . 142
8.6 Metrica di Jacobi. Formulazione non variazionale del Principio di Maupertuis146
8.7 Riduzione Isoenergetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
8.8 Problema di Plateau dell’area minima (o delle bolle di sapone). . . . . . . . 149
8.9 Problema inverso nel Calcolo delle Variazioni: Teorema di Volterra-Vainberg 151
9 Meccanica di Hamilton 155
9.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
9.2 Fibrato cotangente o spazio delle fasi . . . . . . . . . . . . . . . . . . . . . . 156
9.3 Trasformazione di Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
9.4 Globalizzazione della trasformazione di Legendre . . . . . . . . . . . . . . . 158
9.4.1 Appendice: Diffeomorfismi globali di Rn in se . . . . . . . . . . . . . 159
9.5 Equazioni di Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
9.6 Principio Var. di Hamilton-Helmholtz . . . . . . . . . . . . . . . . . . . . . 161
9.6.1 Interpretazione delle Equazioni di Hamilton come opportune equa-zioni di Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
9.6.2 Cenno sul problema delle Lagrangiane equivalenti . . . . . . . . . . . 162
9.7 Coniugazione di Campi Vettoriali . . . . . . . . . . . . . . . . . . . . . . . 164
9.8 Trasformazioni Canoniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
9.9 Condizione di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
9.9.1 La Condizione di Lie e N & S caratterizzante le Trasformazioni Ca-noniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
9.10 Metodo d’integrazione di Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . 174
9.10.1 Metodo d’integrazione di H-J: Hamiltoniana con n−1 variabili cicliche176
9.10.2 Metodo d’integrazione di H-J: Hamiltoniana separabile . . . . . . . . 177
9.10.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
10 Algebra dei Campi Vettoriali 183
10.1 Morfismi d’Algebra, Parentesi di Lie e di Poisson . . . . . . . . . . . . . . . 183
10.2 Algebra di Lie e Trasformazioni Canoniche . . . . . . . . . . . . . . . . . . . 185
10.3 Significato dinamico delle parentesi di Lie . . . . . . . . . . . . . . . . . . . 187
10.4 Formula di Lie-Trotter-Chernov . . . . . . . . . . . . . . . . . . . . . . . . . 190
10.5 Derivata di Lie di Campi Vettoriali . . . . . . . . . . . . . . . . . . . . . . . 190
10.6 Cenni sulla Teoria delle Perturbazioni dei Sistemi Hamiltoniani . . . . . . . 192
10.6.1 Sistemi Hamiltoniani integrabili . . . . . . . . . . . . . . . . . . . . 192
10.6.2 Perturbazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
5

10.6.3 Frequenze Diofantee: Convergenza del primo passo perturbativo . . 194
11 Cenno sull’analisi qualitativa dello spazio delle fasi 19911.1 Teoremi del Trasporto e di Liouville . . . . . . . . . . . . . . . . . . . . . . 19911.2 Teorema del Ritorno di Poincare . . . . . . . . . . . . . . . . . . . . . . . . 202
12 Metodo di Newton e Sistemi Dinamici 20512.1 Metodo di Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20512.2 Equazioni alle differenze finite, campo vettoriale di Newton e stabilita asin-
totica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20712.3 Coniugazione del campo vettoriale di Newton . . . . . . . . . . . . . . . . . 20912.4 Un (altro) teorema di inversione globale . . . . . . . . . . . . . . . . . . . . 209
13 Vettori Applicati, Velocita Angolare, Cinematica Relativa 21113.1 Vettori Applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
13.1.1 Asse Centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21213.1.2 Centro di un sistema di vettori applicati paralleli a con R 6= 0 . . . . 213
13.2 Richiami sulle trasformazioni lineari . . . . . . . . . . . . . . . . . . . . . . 21513.3 Cinematica rigida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
13.3.1 Velocita angolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21613.4 Cinematica relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
14 Derivata di determinante 225
15 Test 22715.1 Alcune domande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22715.2 Altre domande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
6
Capitolo 1
Sistemi Meccanici Vincolati
“Vi sono anzitutto le difficolta che si incontrano quando
si vogliano definire le nozioni fondamentali.
Che cos’e la massa? E’ –risponde Newton– il
prodotto del volume per la densita.
Sarebbe meglio –replicano Thomson e Tait– dire
che la densita e il quoziente della massa per il volume.
Che cos’e la forza? E’ –risponde Lagrange– una
causa che produce il movimento o che tende a produrlo.
E’ –affermera invece Kirchhoff– il
prodotto della massa per l’accelerazione. Ma allora
perche non dire che la massa e il quoziente della
forza per l’accelerazione? Queste difficolta
sono inestricabili.”
Henri Poincare, Le idee di Hertz sulla Meccanica, 1897. 1
1.1 Fondamenti della Meccanica
Introduciamo una elenco di oggetti matematici necessari per lo studio della Meccanica deiSistemi Vincolati. La presentazione di tale elenco, almeno per i primi punti, e di tipo
1Il pessimismo che traspare dalle parole di Poincare sull’edificazione rigorosa dei fondamenti della Mec-canica Classica e decisamente superato: le costruzioni di Mach e Painleve sui principi della Meccanica sonostate in tempi relativamente recenti riprese rigorosamente in un’opera poderosa e originale a cui il lettoreinteressato ai fondamenti dovra rivolgersi —naturalmente non da principiante, ma dopo essersi addentratonel corpo vasto della meccanica:
Aldo Bressan, Metodo di assiomatizzazione in senso stretto della meccanica classica. Applicazione diesso ad alcuni problemi di assiomatizzazione non ancora completamente risolti, Rendiconti del SeminarioMatematico, Universita di Padova, 32 (1962):55-212.
7
gerarchico, nel senso che ogni oggetto via via introdotto ha un carattere piu generale edindipendente dal successivo. Non cureremo la costruzione completa dei fondamenti, bensırichiameremo rapidamente quei concetti utili per entrare concretamente nel cuore dellostudio dei problemi dinamici meccanici.
1.1.1 Spazi Inerziali, Riferimenti Inerziali, Tempo Assoluto
Nell’ambito della Meccanica Classica consideriamo uno Spazio Inerziale Σ. Questo e mo-dellato matematicamente da uno spazio affine 3-dimensionale, del quale scegliamo un puntoO (origine) e tre vettori ortonormali ad O applicati: lo spazio vettoriale generato sara dettoRiferimento Inerziale RΣ associato: denoteremo con vettori di R3 i punti geometrici rap-presentati in tale riferimento. Mentre il ruolo operativo di tali spazi inerziali emergera trabreve nella costruzione della dinamica e dei moti dinamicamente possibili2 la loro esistenzae un fatto assiomatico. Piu precisamente, si postula l’esistenza di uno spazio cinematicoinerziale. A volte, cio e detto Prima Legge della Meccanica Classica. Ogni altro spazioinerziale trasla uniformemente rispetto a questo.Ancora in tale ambito classico, l’Insieme degli Istanti, che ha la struttura di uno spazioaffine 1-dimensionale, viene rappresentato, una volta scelto l’origine e l’unita di misura,dallo spazio vettoriale R1, indipendentemente (“tempo assoluto”) dalla scelta di Σ e delriferimento inerziale.
1.1.2 Punti materiali e masse
Nel nostro modello in costruzione l’universo contenga solamente n punti materialiM1, ...,Mi,...,Mn, di massa rispettivamente m1, ...,mn e mi > 0. Lo schema di punto materiale, qualemodello di particella adimensionale senza struttura interna, e il concetto di massa, sonoritenuti di tipo primitivo, senza necessita quindi di ulteriori specificazioni.
1.1.3 Spazio delle Configurazioni e Spazio degli Atti di Moto per unsistema di punti materiali liberi
Nel riferimento inerziale scelto le configurazioni possibili per il nostri sistema di puntimateriali M1, ...,Mi, ...,Mn, attualmente non vincolato, sono tutti e soli i vettori di R3n escriveremo
(OP1, ..., OPi, ..., OPn) ∈ R3 × ...× R3 = R3n.
Lo spazio R3n × R3n formato dalle configurazioni e corrispondenti velocita consentite alnostro sistema M1, ...,Mi, ...,Mn,
(OP1, ..., OPi, ..., OPn; v1, ...vj , ...vn) ∈ R3n × R3n,
2vedremo che in essi, e solo relativamente ad essi, i ‘moti dinamicamente possibili’ sono caratterizzatidalla ‘legge di Newton’ nella versione del punto 7.
8

e detto spazio degli atti di moto 3.
1.1.4 Forze
Relativamente alle scelte sopra operate sul sistema in studio, sono assegnate delle leggiforza mediante delle funzioni che rappresentano per ogni i = 1, ..., n la risultante delleazioni delle restanti n − 1 particelle sulla particella Mi. In tutta generalita, tali forzepotranno dipendere dalle configurazioni di tutte le particelle, dalle loro velocita, e daltempo,
Fi : R3n × R3n × R→ R3
(..., OPj , ...,vk, ..., t) 7→ Fi(..., OPj , ...,vk, ..., t).
Il significato operativo di tali azioni sara precisato tra breve, nella definizione di motidinamicamente possibili.
Esempio 1. Per n = 2, le due particelle (punti materiali) M1,M2 siano mutuamenteinteragenti mediante forze elastiche attrattive lineari (p.e. e tesa una molla tra loro), in talcaso, per qualche costante strutturale h > 0,
Fi : R6 × R6 × R→ R3, i = 1, 2
(OP1, OP2,v1,v2, t) 7→ F1(OP1, OP2,v1,v2, t) := h(OP2 −OP1) = hP1P2 ∈ R3
(OP1, OP2,v1,v2, t) 7→ F2(OP1, OP2,v1,v2, t) := h(OP1 −OP2) = hP2P1 ∈ R3
Si noti che tale assegnazione di legge forza non dipende ne dalle velocita ne dal tempo, intal caso diremo che il sistema di forze (F1,F2) e, appunto, posizionale.
Esempio 2. Sia n = 1, supponiamo di voler schematizzare con una legge forza l’azione diresistenza che un mezzo (es., un liquido) agisce sulla particella in studio M ; tale forza e(dall’esperienza) tanto piu intensa tanto piu e intensa la velocita, inoltre si oppone al moto;schematizziamo tutto cio cosı: per qualche costante strutturale k > 0
F : R3 × R3 × R −→ R3
(OP,v, t) 7−→ F(OP,v, t) := −kv
Questo e evidentemente una assegnazione di legge forza non posizionale.
3Detto anche spazio delle fasi, sebbene tale nome, a rigore, sia attribuito da molti autori al solo ambientedella Meccanica Hamiltoniana.
9

1.1.5 Vincoli e loro descrizione geometrica
Supponiamo ora di introdurre mediante dei meccanismi ideali delle restrizioni alle confi-gurazioni fin qui ammissibili per il nostro sistema. Diremo che il nostro sistema di puntimateriali e vincolato in maniera olonoma se, per ogni t ∈ R, le configurazioni possibili aquell’istante, sono rappresentate da una sottovarieta N -dimensionale St ⊂ R3n, N < 3n.Diremo che il nostro sistema e vincolato in maniera anolonoma se le restrizioni coinvolgonoanche le velocita, asserendo che, per ogni t ∈ R, le configurazioni e velocita possibili sonodate da una sottovarietaAt dello spazio degli atti di moto del sistema libero, At ⊂ R3n×R3n.
Ci occuperemo del seguito fondamentalmente di vincoli olonomi.
Allo stato attuale, iniziale, di costruzione della teoria non ci preoccuperemo della defi-nizione rigorosa della nozione di ‘sottovarieta’ e piu in generale di ‘varieta’; tentereremo diintrodurla in modo operativo e cureremo in modo rigoroso solamente il suo aspetto locale.Supponiamo che il nostro sistema di n particelle, che in assenza di vincoli avrebbe a dispo-sizione tutto R3n quale spazio di configurazione, sia appunto vincolato in un sottoinsiemedi R3n. Tale sottoinsieme sia dato dagli zeri di qualche funzione f abbastanza regolare,almeno di classe C1 per poter applicare il teorema della funzione implicita che qui sottorichiamiamo a nostro uso, ma anche di piu (C3) per i nostri scopi legati alla meccanica.Daremo inizialmente, per tentativo di chiarezza, un esempio di vincolo indipendente daltempo. Dunque, sia data
f : R3n −→ Rk
(OP1, ...., OPn) 7−→(fα(OP1, ...., OPn)
)∣∣∣α=1,...,k
e affermiamo di aver realizzato un meccanismo che vincola il sistema in
S = f−1(0) =
(OP1, ...., OPn) : f(OP1, ...., OPn) = 0⊂ R3n,
f1(OP1, ...., OPn) = 0....
fα(OP1, ...., OPn) = 0....
fk(OP1, ...., OPn) = 0
In tutta generalita, se f non e lineare, l’insieme S non ha proprieta algebriche interessan-ti, in altre parole, non e un sottospazio vettoriale di R3n : tale fatto genera una primagrande difficolta4: il problema della ‘descrizione geometrica’, della parametrizzazione ditale insieme S. Il teorema della ‘funzione implicita’ (detto t. del Dini) ci aiutera, almeno
localmente. Useremo la seguente notazione OPi = (x(i)1 , x
(i)2 , x
(i)3 ) = (x
(i)Γ )Γ=1,2,3.
4sono difficolta legate a vari aspetti di non-linearita che spesso incontreremo nello studio dei sistemidinamici.
10

(Una versione del) Teorema della Funzione Implicita: Sia data una funzione f di classeC1 come sopra, k < 3n,
f : R3n −→ Rk
OP 7−→ f(OP )
Siai) OP = (OP 1, ...., OP i, ..., OPn) un punto di R3n appartenente aS = f−1(0): f(OP ) = 0;ii) valga la seguente ipotesi ‘algebrica’:il rango del differenziale di f valutato in OP sia massimo 5, cioe k,
rk df(OP ) = k, in dettaglio : rk
∂f1
∂x(1)1
... ∂f1
∂x(n)3
.... ... ...
.... ∂fα
∂x(i)Γ
...
.... ... ...∂fk
∂x(1)1
... ∂fk
∂x(n)3
(OP ) = k.
Esiste allora un intorno aperto U in R3n−k ed una mappa C1 su di esso definita, e a valoriin R3n, scriveremo N := 3n− k,
U ⊂ RN −→ R3n
q = (q1, ..., qh, ..., qN ) 7−→ OP (q)
tale che(1) f(OP (q)) = 0 ∀q ∈ U , (2) OP (U) e un insieme aperto di S nella sua topologia
indotta, OP ∈ OP (U), e OP (·) stabilisce un omeomorfismo di U nell’immagine OP (U) ⊂ S.
Osservazione 1. Tale teorema ci dice che possiamo utilizzare le variabili q come parametridescriventi localmente S, infatti per (1) siamo sicuri OP = OP (q) ∈ S, inoltre, per (2),
con tale mappa descriviamo ‘localmente ma completamente’ S perche OP (U) e un insiemeaperto di S, nella sua topologia indotta. Tali variabili q ∈ U ⊂ RN si dicono coordinateLagrangiane (locali) per S.Osservazione 2. La mappa inversa dell’omeomorfismo sopra descritto,
S ⊃ OP (U) 3 OP 7−→ q = q(OP ) ∈ U ⊂ RN ,
si dice carta locale per S: descrive un pezzo dell’oggetto non lineare S con un pezzo dellospazio vettoriale RN , proprio come le carte geografiche.
5si richiama che al differenziale di f valutato in un punto, che e una mappa lineare, resta associata unamatrice di k righe e 3n colonne.
11

Osservazione 3. Un’attenta ispezione della dimostrazione (e di enunciati non necessaria-mente legati all’applicazione in meccanica) del teorema del Dini mostra che le coordinate
Lagrangiane q1, ..., qN , N = 3n − k, sono selezionabili tra le 3n variabili x(1)1 , ...., x
(n)3
complementari rispetto alle k colonne rispetto alle quali leggiamo il rango massimo nellamatrice del differenziale sopra introdotta. Consideriamo il seguente esempio: Superficiesferica di raggio R > 0.Sia n = 1, k = 1 e sia f data:
f : R3 −→ R
(x1, x2, x3) 7−→ f(x1, x2, x3) = (x1)2 + (x2)2 + (x3)2 −R2
S = f−1(0) =
(x1, x2, x3) : (x1)2 + (x2)2 + (x3)2 −R2 = 0
Consideriamo per esempio il punto OP = (x1, x2, x3) = (0, 0, R), il ‘polo nord’ di S.
rk df(OP ) = rk(∂f∂x1
∂f∂x2
∂f∂x3
) ∣∣OP
= rk(2x1 2x2 2x3
) ∣∣OP
= rk(0 0 2R
)= 1 = k.
Le variabili q1, q2 sono identificabili con x1, x2, la mappa OP e data da (N = 3− 1 = 2)
U := x2 + y2 < R2 3 (q1, q2) 7→ OP (q1, q2) =
x1 = q1
x2 = q2
x3 =√R2 − (q1)2 − (q2)2
Dunque, la mappa stabilisce l’omeomorfsmo tra la calotta ‘boreale’ (senza equatore) e il
disco aperto di R2 di raggio R. Se ora consideriamo, per esempio, il ‘polo sud’ OP =(0, 0,−R), allora la nuova mappa e data da
U := x2 + y2 < R2 3 (q1, q2) 7→ ˜OP (q1, q2) =
x1 = q1
x2 = q2
x3 = −√R2 − (q1)2 − (q2)2
Osservazione 4. (Non ci si curi di approfondire i concetti qui di seguito velocemente accen-nati, almeno strettamente in relazione a questo primo corso di Fisica Matematica) DiremoSottovarieta Differenziale di R3n un sottoinsieme S di R3n, con la topologia indotta, cheammetta un ricoprimento aperto Uρρ∈I , (Uρ)
= Uρ, S = ∪ρ∈IUρ, tale che su ogni Uρ siadefinita una mappa ‘carta locale’ come sopra, a valori in opportuni aperti di uno stesso RN ,ed inoltre tale che relativamente agli aperti per cui Uρ ∩ Uρ′ 6= ∅ esista un diffeomorfismolocale6 q′ = q′(q) —e l’inverso q = q(q′)— rappresentante il ‘cambio di coordinate’ dalle qalle q′, —con qualche altra precisazione topologica su cui ora non entriamo in merito (Hau-sdorff, paracompattezza). L’insieme di tali carte locali si chiama, chiaramente, Atlante. Il
6per esempio, sulla sfera prima descritta, q potrebbero essere due coordinate cartesiane nel disco aperto diraggio R privato del segmento-raggio dei punti dall’origine (0, 0) al punto (0, R), mentre q′ delle coordinatepolari, angolo θ e raggio r, (θ, r) appartenenti al rettangolo aperto ]0, 2π[×]0, R[.
12

numero N e detto Dimensione di S. Benche non ogni sottovarieta si descriva globalmentecome zeri di funzione, localmente questo e sempre possibile.
Osservazione 5. Spazi Tangenti ad una varieta vincolare S. Formalmente, pensando allesottovarieta immerse in R3n, lo spazio tangente in OP a S,
TOPS
e la varieta affine immersa in R3n che contiene OP , che ha la stessa dimensione di S, e che‘approssima al primo ordine’ S. (Primo esempio semplice a cui pensare: curva differenzialee retta tangente in un suo punto.) Definizione alternativa equivalente: e l’insieme delleclassi di equivalenza delle locali curve differenziali ]− ε, ε[3 λ 7→ OP (λ) ∈ S a valori in Se transitanti per λ = 0 per il punto OP , ove la relazione di equivalenza e:
OP (·) ∼ OP ′(·) se e solo sed
dλOP (0) =
d
dλOP ′(0)
• La varieta vincolare S sia localmente descritta come zeri di una funzione f : in tal caso,le curve sopra descritte, tra le quali abbiamo definito la relazione d’equivalenza ∼, hannola proprieta
f(OP (λ)) = 0 ∀λ ∈ ]− ε, ε[,
differenziando rispetto a λ e valutando in λ = 0, denotando con il simbolo (e un uso anticoin meccanica)
δP :=d
dλOP (0) = ... =
d
dλOP ′(0)
il vettore ‘velocita’ caratterizzante la classe, osserviamo che
0 =d
dλ[f(OP (λ))]|λ=0 = df(OP (0))δP
Dunque:
TOPS = ker [df(OP )] (ker : nucleo) (∗)
•• La varieta vincolare S sia localmente descritta con una mappa d’immersione vincolareU 3 q 7→ OP (q) ∈ R3n : in tal caso costruiremo l’insieme delle curve componendo la
mappa d’immersione OP (·) con tutte le arbitrarie curve differenziali λ 7→ q(λ) a valori in
U e transitanti per il medesimo q per cui OP = OP (q),
δP =d
dλ[OP (q(λ))]|λ=0 = dOP (q)
d
dλq(0),
ove i vettori ddλq(0) percorrono tutto RN . Dunque:
TOPS = im [dOP (q)] (im : immagine) (∗∗)
13

Osservazione 6. Spostamenti Virtuali. A volte il vincolo e rappresentato da una varietamobile, dipendente dal tempo. Si pensi per esempio ad una particella (n = 1) vincolatasopra una superficie sferica con raggio ‘pulsante’ R(t) = 2 + sin t. Ad ogni t ∈ R, talevarieta sara descritta dagli zeri di una funzione che ora dipendera dal tempo:
f : R3n × R −→ Rk
(OP1, ...., OPn, t) 7−→(fα(OP1, ...., OPn, t)
)∣∣∣α=1,...,k
St =OP ∈ R3n : f(OP, t) = 0
Si ripercorrono, parametricamente per ogni t fissato, le costruzioni di prima: in sostanza,per t fissato, si ‘congela’ temporalmente la varieta mobile e si costruiscono, per esempio,gli spazi tangenti TOPSt, naturalmente se OP ∈ St; e uso classico in meccanica chiamarespostamenti virtuali i vettori δP degli spazi TOPSt .
1.1.6 Vincoli e loro descrizione dinamica
Il modo, l’azione, con cui il vincolo fa sentire la sua presenza sulle particelle, vincolandolesu di se, e rappresentato da forze, che chiameremo Reazioni Vincolari. Tale affermazione avolte e chiamata nei manuali classici, come il Levi Civita-Amaldi, Postulato delle ReazioniVincolari. Accanto dunque alla descrizione geometrica del vincolo, dovremo dichiararela classe ΥOP,v,t delle reazioni vincolari esplicabili da tale vincolo. Dunque il vincolo ecompletamente descritto quando accanto alla sua definizione geometrica (p.e., sottovarietadi R3n) si dichiara anche l’insieme ΥOP,v,t, che rappresenta, per ogni (OP,v) —atto di motoconsentito geometricamente dal vincolo al tempo t— , l’insieme delle reazioni vincolari, oforze vincolari, che a quel dato istante e in quel dato atto di moto il vincolo puo esplicareper mantenere il sistema, appunto, vincolato su di se. Si noti che a differenza delle leggiforza, per le reazioni vincolari non c’e una legge costitutiva, una funzione, che ad ogni(OP,v) ad un dato istante t associa un ben preciso vettore Φ = (Φ1...,Φi, ...,Φn) ∈ R3n;la situazione nuova e la seguente: ad ogni (OP,v), ad un dato istante t, si associa un benpreciso insieme di vettori reazioni vincolari esplicabili, ΥOP,v,t.Per esempio, per n = 1, nel caso olonomo indipendente dal tempo, il vincolo sia datogeometricamente da una superficie 2-dim S in R3; diciamo ora che tale vincolo sia privodi attrito, cioe il vincolo sia in grado di esplicare tutte e sole le reazioni vincolari concomponente tangenziale a S nulla: pertanto, per ogni configurazione geometricamenteconsentita OP ∈ S, l’insieme ΥOP,v,t = ΥOP e rappresentato da tutti e soli i vettori cheappartengono alla retta passante per OP e ortogonale a S. Rappresentano casi di forteinteresse fisico la classe dei vincoli privi d’attrito, la classe dei vincoli con attrito nel modellodi Coulomb e la classe dei vincoli lisci (o ideali), che, come vedremo tra breve, contienepropriamente la classe dei vincoli privi d’ attrito.
14
1.1.7 Moti Dinamicamente Possibili
Nel sistema di riferimento inerziale scelto, in cui abbiamo costruito gli oggetti descriventiil sistema materiale vincolato, ed in ogni altro sistema di riferimento inerziale (lo studio diquest’ultimo aspetto necessita di un accurato sviluppo della cinematica relativa), vale laseguente costruzione dei moti dinamicamente possibili. Questo e in sostanza il contenutodella Seconda Legge della Meccanica Classica.
Diremo che la curva due volte differenziabile
R ⊇ I 3 t 7→ OP (t) = (OP1(t), ..., OPi(t), ..., OPn(t)) ∈ R3n
e un moto dinamicamente possibile se, per ogni istante t in cui il moto e definito,i) il vincolo e capace di esplicare delle reazioni vincolari
t 7→ (...,Φi(t), ...) ∈ ΥOP (t), ddtOP (t),t
tali che valgano, ∀t ∈ I,
mid2
dt2OPi(t) = Fi(..., OPj(t), ...,
d
dtOPk(t), ..., t) + Φi(t), i = 1, ..., n
ii) il moto soddisfa geometricamente al vincolo: (..., OPi(t), ...) ∈ St ⊂ R3n, ∀t ∈ I.
Notiamo che a questo stadio di generalita le incognite del nostro problema dinamico sonodate sia dal moto, sia dalle reazioni vincolari lungo quel moto: le equazioni dinamichesopra scritte non sono dunque necessariamente interpretabili come equazioni differenziali enon sono quindi, in prima misura, trattabili direttamente con i metodi usuali dell’analisi.Un caso in cui la legge fondamentale della meccanica sopra introdotta e subito interpretabilecome equazione differenziale e il caso dell’assenza di vincolo: S = R3n, ΥOP,v,t = 0. Intal caso i moti dinamicamente possibili sono dati da tutte e sole le soluzioni della seguenteequazione differenziale del secondo ordine in R3n, eventualmente dipendente dal tempo (sele forze lo sono)
mid2
dt2OPi(t) = Fi(..., OPj(t), ...,
d
dtOPk(t), ..., t)
Molto spesso i teoremi sulle equazioni differenziali che si trovano nei manuali di analisimatematica sono per equ. diff. nel formato del primo ordine, eventualmente dipendentidal tempo. Questo non e un grave problema perche rapidamente traduciamo le nostre eq.diff. del secondo ordine (nello spazio delle configurazioni) in eq. diff. del primo ordine(nello spazio degli atti di moto), basta opportunamente raddoppiare le incognite, cosı:
z :=
...OPj...vi...
∈ R6n, Z(z, t) :=
...vj...
1mi
Fi(OP,v, t)
...
, Z : R6n × R→ R6n
15

Pertanto il problema fondamentale della ricerca dei moti dinamicamente possibili (solo peril momento ristretto al caso di assenza di vincolo) diventa: determinare curve R ⊇ I 3 t 7→z(t) ∈ R6n per cui, ∀t ∈ I,
z(t) = Z(z(t), t) (†)
La funzione Z(z, t) si chiama campo vettoriale; pensiamo al caso, per semplicita, indipen-dente dal tempo, z 7→ Z(z), essa va cosı interpretata geometricamente:
in ogni punto z dello spazio7 (pensiamolo pure ‘affine’) attacchiamo il vettore Z(z), e inquesta ‘selva di frecce’ le curve risolventi sono quelle curve differenziabili le cui velocitasono, punto per punto z(t) ove transitano, esattamente le frecce-vettori assegnate Z(z(t)).
Un teorema fondamentale di Cauchy, riportato qui sotto, ci dice sostanzialmente che un po’di regolarita analitica per Z permette di affermare l’esistenza di una ed un’unica soluzionelocale di (†) che transita ad un dato istante prefissato t0 per il punto(=posizione+velocita)z0. Quando questo teorema funziona in meccanica, si parla spesso di ‘determinismoclassico’.
(Una versione del) Teorema di esistenza e unicita locale per i problemi di Cauchydelle equazioni differenziali ordinarie : Sia il campo vettoriale dipendente dal tempoZ,
Z : U(⊆ R6n)× I(⊆ R) −→ R6n, z0 ∈ U = U, t0 ∈ I = I
continuo e, uniformemente in t ∈ I, Lipschitziano in z,
|Z(z1, t)− Z(z2, t)| ≤ L|z1 − z2|, ∀z1, z2 ∈ U, per qualche L > 0.
Allora esiste un sottointervallo aperto I ⊆ I contenente t0 su cui e definita una ed un’unicacurva I 3 t 7→ z(t) ∈ U soddisfacente l’equazione differenziale (†) e transitante per il ‘datoiniziale’ z(t0) = z0.
Osservazione importante: Vedremo che tale schema deterministico, consistente nella teoriaelementare delle equazioni differenziali, sara utilizzabile anche in una importante classe disistemi vincolati: i sistemi olonomi lisci.
1.2 Quiete ed Equilibrio
Un moto si dice di quiete se e costante:
t 7→ OPi(t) ≡ OP ∗i .
Diremo che una configurazione consentita dai vincoli
(OP ∗i )i=1,...,n = (..., OP ∗i , ...) ∈ St7in questo caso, spazio degli atti di moto o spazio delle fasi.
16

e di equilibrio per il nostro sistema meccanico se il moto di quiete in tale configurazione edinamicamente possibile; piu in dettaglio, (OP ∗i )i=1,...,n e di equilibrio se il vincolo e capacedi esplicare delle reazioni vincolari t 7→ (...,Φi(t), ...) ∈ ΥOP ∗,0,t tali che, per ogni t,
0 = Fi(..., OP∗j , ...,0, ..., t) + Φi(t), (..., OP ∗i , ...) ∈ St.
Si noti con attenzione che mentre l’equilibrio e una configurazione, la quiete e un moto.E’ pure importante la seguente osservazione: Il fatto che una certa configurazione siad’equilibrio non implica necessariamente che il moto conseguente al porre il sistema inquella configurazione con atto di moto nullo sia la quiete. Esempio. Una particella dimassa m soggetta alla forza F(OP ) = 3
√OP · u u e vincolata senza attrito su di un
asse X parallelo al versore u e contenente l’origine. E’ facile mostrare (farlo) che i motidinamicamente possibili sono dati da tutte e sole le soluzioni di
mx = 3√x,
ove x e l’ascissa sull’asse X; x∗ = 0 e configurazione d’equilibrio, ed il Problema di Cauchyx(0) = 0, x(0) = 0 e soddisfatto, oltre da x(t) ≡ 0, da altre infinite soluzioni (trovarle, emeditare sulla Lipschitzianita assente).
1.3 Vincoli privi d’attrito
E’ di importanza cruciale la ricerca e la definizione di modelli di vincolo, che da un latosiano fisicamente interessanti, utili, dall’altro porgano una descrizione dei moti dinamica-mente possibili trattabile matematicamente, riuscendo, tra l’altro, a scindere la difficoltadella determinazione del moto (teoria delle equazioni differenziali, problema di Cauchyed eventuale determinismo-unicita) da quella della determinazione delle reazioni vincolari.Consideriamo a tal scopo i sistemi cosiddetti privi d’attrito, gia precedentemente accennati.Per fissare le idee, consideriamo una particella vincolata su una varieta S 1-dimensionale(curva) o 2-dimensionale (superficie). Diciamo che tale vincolo e privo di attrito, se nonsono ammissibili componenti tangenziali di reazione vincolare al piano tangente locale allaconfigurazione: pertanto, nel caso 1-dimensionale per ogni configurazione geometricamenteconsentita OP ∈ S, l’insieme ΥOP e rappresentato da tutti e soli i vettori che appartengonoal piano ortogonale alla retta tangente a S in OP ; nel caso 2-dimensionale per ogni confi-gurazione geometricamente consentita OP ∈ S, l’insieme ΥOP e rappresentato da tutti esoli i vettori che appartengono alla retta ortogonale al piano tangente locale a S in OP .
17

1.4 Un sistema meccanico la cui dinamica e retta dall’equa-zione differenziale x = f(x), con x ∈ R1
(Attenzione: all’interno di questo lungo esempio e introdotta la nozione di Integrale Primo.)
Studiamo in dettaglio il sistema dinamico composto da una particella P di massa m > 0,che e soggetta alla (legge) forza posizionale, indipendente dal tempo, data da:
F : R3 −→ R3, OP 7−→ F(OP ).
La forza F = (F1, F2, F3) non sia necessariamente conservativa, cioe l’associata 1-formadifferenziale “Lavoro” δL in R3, i cui coefficienti sono dati proprio dalle componenti dellafunzione F,
δL : R3 −→ (R3)∗, OP 7−→ δL(OP ) = F(OP ) · δOP, ∀δOP ∈ R3
non sia necessariamente chiusa (qui, in R3, la condizione di chiusura si scrive: rot F = 0), edunque, visto che l’ambiente R3 e semplicemente connesso, non sia necessariamente esatta(ma su tali aspetti si insistera altrove).Introduciamo il vincolo geometrico olonomo 1-dimensionale (una “guida”), di cui unagenerica immersione vincolare, regolare (almeno C2), sia data da:
R 3 λ 7−→ OP (λ) ∈ R3.
A questa generica parametrizzazione della curva chiederemo, oltre alla regolarita, che non
ammetta punti λ∗ tali che dOPdλ (λ∗) = 0, cio e un fatto puramente tecnico. La particella
ora e vincolata su tale guida: preliminarmente, studieremo in dettaglio la geometria dellacurva, mediante il
Triedro di Frenet: ‘Rettifichiamo’ la curva, cioe misuriamone la lunghezza, il che eequivalente all’introduzione del parametro (lunghezza) d’arco s = s(λ):
s(λ) :=
∫ λ
0
∣∣∣∣∣∣dOPdλ
(λ′)∣∣∣∣∣∣R3dλ′, ove
∣∣∣∣∣∣W∣∣∣∣∣∣R3
:=√W 2
1 +W 22 +W 2
3 .
L’ipotesi che dOPdλ 6= 0 mostra che ds(λ)
dλ =∣∣∣∣∣∣dOPdλ (λ)
∣∣∣∣∣∣R3
> 0 e dunque la mappa λ 7→s(λ) e un diffeomorfismo di R in R. E’ cosı ben definita l’inversa s 7→ λ(s), e con essariparametrizziamo la curva col parametro d’arco s:
R 3 s 7−→ OP (s) := OP (λ(s)) ∈ R3.
Notiamo subito che la funzione vettoriale tangente dOPds (s) ha identicamente norma euclidea
unitaria: ∣∣∣∣∣∣dOPds
(s)∣∣∣∣∣∣R3
=∣∣∣∣∣∣dOPdλ
(λ)∣∣λ=λ(s)
dλ
ds(s)∣∣∣∣∣∣R3≡ 1.
18

Tale derivata la chiameremo versore (=vettore unitario) tangente:
t(s) :=dOP
ds(s).
Studiamo la derivata di t. Indichiamo con n, laddove e definito (∣∣∣∣∣∣dtds(s)∣∣∣∣∣∣ 6= 0), il seguente
versore:
n(s) :=dtds(s)∣∣∣∣∣∣dtds(s)∣∣∣∣∣∣ .
Per esempio, per una retta t e costante, dunque n non e (ovunque) definito. Anzi,quest’esempio ci suggerisce di definire come curvatura k della curva in s la quantita scalare:
k(s) :=∣∣∣∣∣∣dtds
(s)∣∣∣∣∣∣.
Introduciamo pure la definizione
ρ(s) :=1
k(s).
Si noti che i versori t e n sono tra loro ortogonali, infatti (t · t ≡ 1):
0 =d
ds(t(s) · t(s)) = 2 t(s) · n(s)
ρ(s).
Teorema. Per ogni s tale che k(s) 6= 0,i) il versore n(s) punta verso il centro del locale cerchio osculatore di cuiii) ρ(s) ne e il raggio.
Prova. Mentre la retta tangente in s∗ e l’approssimazione di primo ordine (lineare in s)alla curva, il cerchio osculatore in s∗ e, per definizione, l’approssimazione di secondo ordine(quadratica in s) alla curva in un punto s∗. Infatti, sia (non e restrittivo) s∗ = 0, alloralocalmente
OP (s) = OP (0) + t(0) s+1
2!
dt
ds(0) s2 +O(s3) = OP (0) + t(0) s+
1
2!
n(0)
ρ(0)s2 +O(s3)
Notiamo che, al secondo ordine in s (cioe a meno di O(s3)), la curva e descritta nel piano π
passante per il punto OP (0) e generato dai vettori t(0) e n(0). In tale piano consideriamo
il cerchio che passa per OP (0), ha raggio ρ(0), e centro in OC = OP (0) + ρ(0)n(0). (Siabbozzi in un disegno un piano cartesiano in cui il versore x e n(0) e il versore y e t(0)).Scriviamo l’equazione parametrica di tale cerchio nel parametro lunghezza d’arco s:
OQ(s) = OP (0) + ρ(0) sins
ρ(0)t(0) + ρ(0)
(1− cos
s
ρ(0)
)n(0).
19

Calcoliamo derivate prime e seconde di OQ(s) in s = 0:
d
dsOQ(s)
∣∣s=0
=[
coss
ρ(0)t(0) + sin
s
ρ(0)n(0)
]∣∣s=0
= t(0),
d2
ds2OQ(s)
∣∣s=0
=[− 1
ρ(0)sin
s
ρ(0)t(0) +
1
ρ(0)cos
s
ρ(0)n(0)
]∣∣s=0
=n(0)
ρ(0).
Dunque, effettivamente tale cerchio cosı costruito approssima la curva, localmente in s∗ = 0,al secondo ordine.
Definiamo infine il versore binormale
b(s) := t(s) ∧ n(s).
Infine: in ogni punto OP (s) della curva, con curvatura non nulla, resta definito il triedro
ortonormale levogiro(t(s),n(s),b(s)
), detto triedro di Frenet.
Sia ora t 7→ s(t) un moto geometrico, cinematico, non necessariamente dinamicamentepossibile, per P . Determiniamo le associate grandezze cinematiche: velocita ed accele-razione.
v(t) =d
dt
[OP (s(t))
]= t(s(t)) s(t),
a(t) =d2
dt2
[OP (s(t))
]=
d
dt
[t(s(t)) s(t)
]=
d
dst(s(t)) s2(t) + t(s(t)) s(t),
a(t) = t(s(t)) s(t) +n(s(t))
ρ(s(t))s2(t).
(Si veda pure: G. De Marco, Analisi Due/1, cap. 3, Par. 9 e 10, oppure G. De Marco,Analisi Due (seconda edizione) alla fine del cap. 3.)
Riprendiamo ora la descrizione del nostro sistema dinamico. Sia t 7→ s(t) un genericaevoluzione di P sulla guida. Supponiamo che la particella sia vincolata senza attrito sullaguida: cio e equivalente a dire che la classe delle reazioni vincolari esplicabili, quando l’attodi moto vale (
OP (s(t)),d
dt
[OP (s(t))
]),
e data da tutti e soli i vettori del piano di origine OP (s), e generato da(n(s),b(s)
); in
altre parole, le possibili reazioni vincolari non hanno componente tangente al vincolo.Ora possiamo dire che un moto t 7→ s(t), e dunque t 7→ OP (s(t)), e dinamicamente possibilese e solo se il vincolo e capace di esplicare una reazione vincolare t 7→ Φ(t) con Φ · t ≡ 0tale che, per ogni tempo t in cui e definito il moto, valga:
md2
dt2
[OP (s(t))
]= F
(OP(s(t)
))+ Φ(t),
20

proiettando sul triedro mobile di Frenet, risulta:
ms(t) = F(OP(s(t)
))· t(s(t)),
m s2
% = F · n + Φ · n,0 = F · b + Φ · b.
Notiamo due fatti fondamentali.Primo, il problema della determinazione del moto e della reazione vincolare si disac-
coppia: la prima equazione, la t-componente (indipendente da Φ), e interpretabile comeequazione differenziale, da cui determiniamo t 7→ s(t), mentre dalle altre due determine-remo successivamente Φ = Φ ·n n + Φ ·b b. La possibilita sistematica della rimozione delproblema vincolare risultera chiara per una classe di sistemi generalizzanti quello appenaanalizzato: i sistemi a vincoli lisci, olonomi e bilaterali (varieta senza bordo).
Secondo, questa equazione differenziale e di tipo cosiddetto integrabile, cioe i problemidi Cauchy
(∗)s(t) = f(s(t)),s(0) = s0,s(0) = s0,
ove la funzione f e ben definita mediante m, F(·), OP (·) e le sue derivate:
f(s) :=1
mF(OP(s))· t(s),
si risolvono a meno del calcolo di primitive di integrali e di inversioni di funzioni. Questaproprieta, goduta dai sistemi differenziali lineari, e rarissima nel caso non lineare, comeappunto quello che stiamo trattando. Qui nel seguito realizzeremo questo programma.Nelle ipotesi di regolarita scelte per F e per la curva-guida (C2), segue che f e C1, inparticolare Lipschitziana, dunque il teorema di esistenza ed unicita per i problemi di Cauchyvale: (∗) ammette una ed un unica soluzione locale (nel tempo, per t in un intervalloaperto contenente lo zero). Mostriamo che (∗) ammette il seguente integrale primo, di tipo‘energia’
R2 3 (s, s) 7−→ E(s, s) :=1
2s2 −
∫ s
s0
f(λ) dλ ∈ R,
infatti lungo le soluzioni s(t) di s = f(s) la funzione E(s, s)∣∣s(t)
e costante:
d
dtE(s(t), s(t)) = s s− f(s) s =
[s− f(s)
]s = 0.[
Digressione-richiamo sugli integrali primi: data l’equazione differenziale
x = X(x), X : Rm −→ Rm
21

la funzione scalare Rm 3 x 7→ φ(x) ∈ R e un suo integrale primo se lungo ogni sua soluzionet 7→ x(t) la funzione composta t 7→ φ(x(t)) e costante (naturalmente, la costante varia dasoluzione a soluzione). Utilizzazione geometrica degli integrali primi: abbassamento delladimensionalita del problema. Infatti, se si conosce l’integrale primo φ, e si vuol indagaresulla regione di Rm ‘invasa’ dall’orbita soluzione del problema di Cauchy
x = X(x), x(0) = x0,
possiamo senz’altro restringerci alla regione (m − 1)−dimensionale φ−1(φ(x0)) ⊂ Rm; ineffetti, lungo l’orbita x = x(t, x0), x(0, x0) = x0, si ha che per ogni t: φ(x(t, x0)) = φ(x0),cioe l’orbita sta sul luogo φ−1(φ(x0)). Se si conosce un altro integrale primo, diciamoψ(x), allora si e sicuri che l’orbita sta su φ−1(φ(x0))
⋂ψ−1(ψ(x0)), un sottoinsieme ora
(m − 2)−dimensionale (almeno genericamente, certe condizioni di rango devono esseresoddisfatte, vedi sotto). Infine: la conoscenza di m− 1 integrali primi per x = X(x),
φ1(x), ..., φα(x), ..., φm−1(x),
‘funzionalmente indipendenti’, cioe:
rk
∂φ1
∂x1(x) ... ∂φ1
∂xm(x)
... ... ...∂φm−1
∂x1(x) ... ∂φm−1
∂xm(x)
∣∣∣∣∣x∈
⋂m−1α=1 φ−1
α (φα(x0))
= max = m− 1,
ci permette geometricamente di determinare il luogo 1−dimensionale sostegno della curvasoluzione del suddetto problema di Cauchy.
]Si tratta ora di mostrare l’equivalenza del problema (∗) con il seguente problema
(∗∗)12 s
2 −∫ ss0f(λ) dλ = 1
2 s20,
s(0) = s0,s(0) = s0.
Quest’ultimo infatti coinvolge la derivata prima della funzione incognita s(t), in realta,invece di un abbassamento dimensionale abbiamo realizzato un abbassamento dell’ordinedi differenziazione della primitiva equazione differenziale che coinvolge la derivata seconda.Le due procedure sono equivalenti: nel seguente senso, ogni equazione differenziale di ordinek,
(#) dk
dtkx = X( d
k−1
dtk−1x,dk−2
dtk−2x, ..., x)
22

si puo ridurre al primo ordine aumentando opportunamente le variabili e dunque la dimen-sionalita:
(##)
x0 = x1,x1 = x2,x2 = x3,.... .......
xk−2 = xk−1
xk−1 = X(xk−1, xk−2, ..., x1, x0)
Se x in (#) e in Rm, ora la nuova incognita (x0, x1, ..., xk−1) ∈ Rkm.
Torniamo al problema dell’equivalenza. Il fatto che (∗) implica (∗∗) e banale, un po’piu delicato e il viceversa. Si noti che in (∗∗) la derivata d’ordine massimo, la prima,non compare esplicitata rispetto al resto, cioe quell’equazione differenziale non e in formanormale, questo creera qualche (superabile) complicazione.
Per fissare le idee, sia s0 6= 0. Supponiamo dunque che t 7→ s(t) risolva (∗∗). Sia t1il primo istante d’arresto per tale moto, cioe s(t) 6= 0 ∀t ∈ [0, t1) e s(t1) = 0. Derivandorispetto al tempo la (∗∗)1 otteniamo[
s(t)− f(s(t))]s(t) = 0,
che per t ∈ [0, t1), dunque s(t) 6= 0, implica la (∗)1. Cosa accade per t ≥ t1? Per t = t1puo capitare una delle due seguenti situazioni:
1) s1 = s(t1) e d’equilibrio: f(s1) = 0,2) s1 = s(t1) non e d’equilibrio: f(s1) 6= 0.
Il primo caso non puo accadere per t1 finito: infatti se cosı fosse il sistema arrivato lı convelocita nulla dovrebbe ivi restarci per sempre, per il teorema di esistenza e unicita, perogni t, nel futuro e nel passato di t1. Dunque sarebbe proprio il teorema di unicita adessere violato perche avremmo trovato due soluzioni al problema di Cauchy
s(t) = f(s(t)),s(t1) = s1,s(t1) = 0,
assurdo, abbiamo supposto f regolare (Lipschitziana). Questa considerazione e generale:non e possibile raggiungere un equilibrio, in tempi finiti, con velocita nulla.Resta quindi la seconda possibilita, s1 non e d’equilibrio, e in un intorno ‘forato’ di t1si ha che f(s(t)) 6= 0, dunque t1 e un istante d’arresto. Per quanto riguarda il nostroproblema dell’equivalenza, in tale intorno forato, dalla
[s(t) − f(s(t))
]s(t) = 0 otteniamo
s(t) = f(s(t)), e, per continuita, quest’ultima e soddisfatta pure in t = t1. Per tempimaggiori di t1 si itera questo procedimento di studio. L’equivalenza di (∗) con (∗∗) e cosıdimostrata.
23

Piu precisamente, t1 e un istante di inversione del moto, infatti (Taylor):
s(t) = s(t1) + 12!f(s1)(t− t1)2 +O(|t− t1|3),
s(t) = f(s1)(t− t1) +O(|t− t1|2),
l’ultima di queste relazioni mostra chiaramente che la velocita s(t) cambia segno in t1.Procediamo quindi con il problema (∗∗). Dato che abbiamo supposto che s0 6= 0, in un
intorno destro di t = 0, [0, t1), la (∗∗) si scrive:
s(t) = sign(s0
) √s2
0 + 2∫ ss0f(λ) dλ
(=: Ψ(s)
)s(0) = s0.
Si risolve per ‘separazione di variabili’. Dato che in [0, t1) si ha che Ψs(t)) 6= 0, scriviamos(t)
Ψ(s(t)) = 1, e integriamo membro a membro tra 0 e t:∫ t
0
s(t′)
Ψ(s(t′))dt′ = t.
Sempre in [0, t1) sicuramente il moto soluzione t 7→ s(t) e un diffeomorfismo con l’immagine,usiamolo per operare un cambio di variabile d’integrazione∫ s
s0
1
Ψ(s′)ds′ = t.
Indichiamo con G(s) la primitiva del primo membro: l’inversione di G(s) = t e esattamentela soluzione cercata t 7→ s(t).
1.4.1 Diagramma di Fase per x = f(x)
Le anti-immagini, le ‘fibre’, della funzione
R2 3 (x, x) 7−→ E(x, x) :=1
2x2 −
∫ x
af(λ) dλ ∈ R, (a : fissato)
rappresentano il sostegno delle curve soluzione dei problemi di Cauchy per l’equazionex = f(x):
E−1(e) = (x, x) : E(x, x) = e.
Studiamone la geometria globalmente.• il grafico di E−1(e) in R2 e simmetrico rispetto all’asse x: in effetti, E e funzione pari inx.
24

• Il teorema della funzione implicita ci assicura che E−1(e) e regolare (una ‘varieta’ 1-dimensionale in R2) se il rango
rk(∂E∂x
∂E∂x
) ∣∣E−1(e)
=(−f(x) x
) ∣∣E−1(e)
= max = 1.
Studiamo gli eventuali punti singolari, questi sono i punti (x∗, x∗) che annullano i dueelementi della matrice: f(x∗) = 0, x∗ = 0. Dunque questi punti sono esattamente leconfigurazioni d’equilibrio per x = f(x), assieme a x∗ = 0, dato che stiamo leggendo lanostra equazione nello spazio degli atti di moto o delle fasi. Tali punti singolari sono tuttie soli sull’asse x.• Possono esistere rami di E−1(e) con punti (x, x), x 6= 0, nei quali la tangente sia verticale,parallela all’asse x? No, le locali funzioni x 7→ x(x) —i cui grafici sono in (x, x) ∈ R2 :x > 0 e (x, x) ∈ R2 : x < 0, e definite negli intervalli aperti (x1, x2) tra consecutivi puntidi intersezione con l’asse x, (x1, 0), (x2, 0)— sono differenziabili, quindi la fenomenologiasopra descritta non puo accadere.• Sui rami di E−1(e) possiamo agevolmente stabilire il verso di percorrenza: questo sarainequivocabilmente stabilito dal locale segno di x: per esempio, se E−1(e) e una curvachiusa (naturalmente, simmetrica rispetto all’asse x) allora essa e percorsa in senso orario.• Proseguendo con l’esempio di E−1(e) curva chiusa, se essa e regolare allora necessaria-mente interseca l’asse x due volte e con tangente, diciamo in (x1, 0) e (x2, 0), verticale, cioeparallela all’asse delle x. Curve E−1(e) che intersecano l’asse x in x con angoli diversi daπ/2 sono necessariamente ivi singolari, e danno luogo a rami intersecantesi in x: esempio,le separatrici del pendolo in x(= θ) = π.• Ancora con l’esempio di E−1(e) curva chiusa. Il moto e periodico, e il periodo si calcola(verificarlo):
T = 2
∫ x2
x1
dx√2(e+
∫ xa f(λ)dλ
) .E’ interessante notare la relazione Periodo-Energia: Sia A(e) l’area racchiusa dalla curvachiusa E−1(e), essa vale
A(e) = 2
∫ x2
x1
x(x; e)dx = 2
∫ x2
x1
√2(e+
∫ x
af(λ)dλ
)dx,
dove x 7→ x(x; e) e l’esplicitazione nel semipiano x > 0 di E(x, x) = e; si osserva che:
T =dA
de(e).
25
Grafico della funzione Energia Totale per il Pendolo
26

Altri esempi a questo stadio facilmente risolubili. Consideriamo una particella vincolatasenza attrito su di un piano π e una legge forza F(OP,v) (eventualmente lineare: in talcaso infatti le soluzioni sono rappresentabili mediante funzioni elementari). Introdotto unriferimento (O, x1, x2, x3) con (O, x1, x2) coincidente con π, con un procedimento analogo alprecedente (ora si proietta l’equazione fondamentale della Meccanica sui tre assi xi) si notaancora il disaccoppiamento della determinazione del moto dalla reazione vincolare. Talemoto sara governato da un’ equazione differenziale del secondo ordine nel piano, fornentet 7→ (x1(t), x2(t)).
Prima di procedere ulteriormente, estendiamo la nozione di lavoro virtuale al caso di n par-ticelle. Sia F = (F1, ...,Fn) ∈ R3n un insieme di vettori applicati in OP = (OP1, ..., OPn),configurazione ammissibile ad un vincolo (eventuamente dipendente dal tempo) St ⊂R3n, t ∈ R. Si consideri lo spazio tangente a St per t fissato (vincolo ‘congelato’). In-dichiamo con δP = (δP1, ..., δPn) ∈ TOPSt il generico vettore tangente locale. Alloradiremo lavoro virtuale della distribuzione di forze F in OP la ‘forma lineare’, o ‘1-forma’,elemento del duale T ∗OPSt di TOPSt, che essa individua:
δLF :=n∑i=1
Fi · δPi (· : prodotto scalare in R3).
1.5 Metodo di Lagrange per la determinazione delle Rea-zioni Vincolari
Consideriamo un sistema di n particelle vincolate senza attrito in maniera olonoma su diuna varieta S definita mediante zeri di k funzioni regolari (differenziabili con continuita ungiusto numero di volte):
fα(OPi) = 0, α = 1, ..., k f : R3n → Rk.
Supponiamo che siano funzionalmente indipendenti su S:
rango(df)|S = k.
Dire che il vincolo e privo d’attrito significa equivalentemente che, per ogni configurazioneprefissata OP ∗ del nostro vincolo olonomo (indipendente dal tempo) S, le n-uple di reazionivincolari esplicabili Φ = (Φ1, ...,Φn) sono tutte e sole quelle che fanno lavoro nullo perogni spostamente virtuale (vettore tangente) δP = (δP1, ..., δPn) consentito dal vincolo:
df(OP ∗)δP = 0⇒ dLΦ := Φ · δP =
n∑i=1
Φi δPi = 0.
Dunque, il nucleo dell’applicazione lineare differenziale df(OP ∗) : R3n → Rk e contenutonel nucleo dell’applicazione lineare 1-forma lavoro delle reazioni vincolari dLΦ : R3n → R.
27

Usando il classico teorema di omomorfismo (per spazi vettoriali) (vedi: De Marco, AnalisiDue/1, p.331) concludiamo che esiste una mappa lineare Λ : Rk → R tale che
dLΦ = Λ df(OP ∗), o, equivalentemente : Φi =
k∑α=1
λα∇OPifα(OP ∗)
dLΦ
R3n −→ R
df(OP ∗) ↓ Λ
Rk
Le componenti di Λ = (λ1, ..., λk) sono i ben noti Moltiplicatori di Lagrange. Infine, i motidinamicamente possibili consistono nelle soluzioni del sistema algebrico-differenziale mi
d2
dt2OPi(t) = Fi(OPj(t),
ddtOPl(t), t) +
∑kα=1 λα(t)∇OPifα(OPj(t)),
fα(OPj(t)) = 0
nelle incognite t 7→ (OPi(t), λα(t)).
Esercizio (importante). Verificare che il sistema algebrico-differenziale sopra scritto porgein modo univoco le λα e dunque le reazioni vincolari. (Suggerimento: derivare due volterispetto al tempo le fα composte con le soluzioni, con l’espressione cosı ottenuta eliminarele accelerazioni dalle equazioni dinamiche, quindi, usando l’indipendenza funzionale dellefα, esplicitare le λα rispetto all’atto di moto).
Soluzione: Sia fβ(OP ) = 0, β = 1, ..., k ≤ 3n, (OP ) ∈ R3n. Un moto t 7→ OPi(t),t ∈ I e dinamicamente possibile se e solo se fβ(OP (t)) = 0 ∀t ∈ I e vale:
mid2
dt2OPi(t) = Fi(OP (t),
d
dtOP (t), t) +
k∑α=1
λα(t)∇OPifα(OP (t)) (1)
Le incognite del problema sono sia i moti che i moltiplicatori cioe t 7→ (OPi(t), λα(t)).Deriviamo rispetto al tempo fβ(OP (t)) = 0 e otteniamo:
n∑i=1
∇OPifβ(OP ) · ddtOPi(t) = 0
28

Derivando di nuovo si ottiene:⟨∑k,i
∇2OPkOPi
fβ ·d
dtOPk(t),
d
dtOPi(t)
⟩+∑i
∇OPifβ ·d2
dt2OPi(t) = 0. (2)
Ora dividiamo (1) per mi ottenendo:
d2
dt2OPi(t) =
Fi
mi(OP (t),
d
dtOP (t), t) +
k∑α=1
λα(t)∇OPimi
fα(OP (t)),
da cui si ha:
∑i
∇OPifβ(OP )· d2
dt2OPi =
∑i
Fi
mi∇OPifβ(OP )+
k∑α=1
(∑i
∇OPifβ(OP ) · ∇OPifα(OP )
mi
)λα
(3)
Definiamo
Λβ,α :=∑i
1
mi∇OPifβ(OP ) · ∇OPifα(OP )
e confrontiamo (2) e (3) ottenendo:
−
⟨∑k,i
∇2OPkOPi
fβ ·d
dtOPk(t),
d
dtOPi(t)
⟩=∑i
Fi
mi∇OPifβ(OP ) +
k∑α=1
Λβ,αλα (4)
Osserviamo che Λα,β e non degenere, cio discende dal fatto che il rango di df e massimocioe: rango(df)|f=0 = k, questo implica che la forma quadratica associata a Λα,β e definitapositiva, infatti:
k∑α,β=1
Λα,βξαξβ =∑i
(∑α
∇OPifα√mi
ξα ·∑α
∇OPifβ√mi
ξβ
)= |v|2R3n .
dove v =(∑
α∇OP1
fα√m1
ξα, ...,∑
α∇OPnfα√
mnξα
). Poiche si ha v = 0 ⇐⇒ (ξ)α=1,...,k = 0
ne segue che e una forma quadratica definita positiva. Quindi det Λα,β 6= 0 e dalla (4)possiamo infine esplicitare:
λα = λα(OP, OP , t).
29

1.6 Il modello di Coulomb dell’attrito
Consideriamo una particella vincolata su una varieta 1-dimensionale (curva) o 2-dimensionale(superficie). Vogliamo definire la classe ΥOP,v,t delle reazioni vincolari nel caso che il vincolosia con attrito. Scriveremo
Φ = ΦT + ΦN ,
ove ΦT e la componente vettoriale di Φ sul piano tangente al vincolo, la cosiddetta forzad’attrito, e ΦN e la componente vettoriale ortogonale al piano tangente. v 6= 0: in tal casodiremo che il vincolo esplica tutte e sole le reazioni vincolari tali che
ΦT = − v
|v|fd|ΦN |,
ove 0 ≤ fd e detto coefficiente di attrito dinamico e i moti dinamicamente possibili sonocaratterizzati da
ma(t) = F(OP (t),v(t), t) + Φ(t).
v(t∗) = 0, primo caso: se accade che, detto fs il coefficiente di attrito statico, 0 ≤ fd ≤fs, e in un opportuno intorno destro I di t∗,
0 = F(OP (t∗),0, t) + Φ, |ΦT | ≤ fs|ΦN |,
il sistema restera ivi in quiete; diremo che la configurazione OP (t∗) e d’equilibrio se ilsuddetto intervallo I e superiormente illimitato.
v(t∗) = 0, secondo caso: se accade che la precedente disuaglianza non sia soddisfatta,allora, per t in un opportuno intorno destro di t∗ e fino ad un successivo istante d’arresto,il sistema evolve e vale la precedente descrizione per v 6= 0.
Si noti pero che nell’ultimo caso la reazione vincolare non e definita per v(t∗) = 0, piuprecisamente, c’e una discontinuita della forza d’attrito in t∗. Il sistema evolve comunquenella direzione della forza attiva tangenziale, infatti, si ha
v(t) = a(t∗)(t− t∗) + o(t− t∗),
(ove o(t− t∗) significa “o piccolo di (t− t∗)”) ma anche
v(t) = aT (t∗)(t− t∗) + o(t− t∗),
dato che v e tangente al vincolo. Ora consideriamo l’equazione dinamica (per v(t) 6= 0),proiettiamola sul vincolo, e valutiamo il seguente limite
limt→(t∗)+
maT (t) = limt→(t∗)+
(FT (OP (t),v(t), t)− aT (t∗)(t− t∗) + o(t− t∗)|aT (t∗)(t− t∗) + o(t− t∗)|
fd|ΦN (t)|),
otteniamo cheversaT (t∗) = versFT (OP (t∗),0, t∗).
30

(Quest’ultimo risultato e detto talvolta teorema del moto incipiente, per esempio, nel LeviCivita-Amaldi). Infine:
v(t)||FT (OP (t∗),0, t∗)(t− t∗) + o(t− t∗).
Alcune osservazioni. Notiamo che l’insieme delle reazioni esplicabili dipende dall’attodi moto (configurazione e velocita) della particella. Consideriamo per esempio il caso delvincolo di superficie: in situazione di quiete le reazioni vincolari possibili appartengonoalla chiusura del cono a due falde di semi-apertura arctan(fs), in situazione dinamica lereazioni vincolari possibili appartengono alla superficie conica a due falde di semi-aperturaarctan(fd) e con la forza d’attrito che si oppone al moto. (Compiere l’analoga analisi per ilvincolo 1-dimensionale). Si noti che il modello di Coulomb dell’attrito non consiste in unamera definizione della classe delle reazioni vincolari sviluppabili: pure la seconda legge dellameccanica ne risulta modificata. I coefficienti d’attrito sono di determinazione empirico-sperimentale e sono costitutivi del nostro sistema vincolato; la relazione fd ≤ fs esprime ilfatto (euristico, ma fisicamente attendibile) che, a parita di forza attiva F, la forza d’attritopuo essere maggiore (in intensita) nelle situazioni statiche rispetto a situazioni dinamiche,in altre parole, e piu difficile mettere in moto un sistema con attrito che mantenere il motostesso.
Esercizi.1) Su un piano inclinato π rispetto alla verticale di un angolo α e vincolata con attrito
una particella di massa m. Oltre la gravita, agisce sulla particella una forza elastica dicostante h > 0 di centro un punto fisso O sul piano π. Detto fs il coefficiente di attritostatico, determinare tutte le configurazioni d’equilibrio.
2) Su di un asse orizzontale X e vincolata con attrito una particella di massa m. Oltrealla gravita, agisce sulla particella una forza elastica di costante h > 0 di centro un puntofisso O sull’asse X. Detti fd ≤ fs i coefficienti di attrito, i) determinare tutte le configura-zioni d’equilibrio, ii) studiare la dinamica di tale sistema, in particolare, determinare dopoquanto tempo il sistema si arresta se l’atto di moto iniziale consiste di una configurazionidi non equilibrio e di velocita nulla, iii) dimostrare che O e una configurazione d’equilibrioLyapunov stabile, iv) confrontare questo sistema dinamico con quello che si ottiene daquest’ultimo supponendo privo d’attrito l’asse X, fd = fs = 0, e supponendo agisca, oltrela gravita e la forza elastica, una forza di resistenza di mezzo di tipo viscoso Fv = −kv,ove k > 0 e v e la velocita.
1.7 Vincoli Lisci o Ideali
(Definizione di) Vincolo Liscio. Un vincolo si dice liscio se riesce ad esplicare tutte esole le reazioni vincolari che fanno lavoro virtuale nullo per ogni spostamento virtuale:
δL(v) = 0, per ogni δP virtuale.
31

Come accennato precedentemente nel punto 6, mostriamo che effettivamente la classedei vincoli lisci contiene propriamente la classe dei vincoli privi di attrito. Consideriamo undisco materiale di raggio R vincolato senza attrito a stare in un piano π, ed a ruotare senzastrisciare su di un asse x (retta) di tale piano. Dal punto di vista geometrico tale vincolo sipropone come vincolo anolonomo: infatti il puro rotolamento significa che (l’unica) velocitaconsentita dal vincolo al punto materiale P del disco che localmente transita per il puntogeometrico C di contatto con la retta x e la velocita nulla. Un conto geometrico-cinematicomolto semplice mostra che tale vincolo anolonomo (vP = 0) e equivalente ad una famiglia1-parametrica di vincoli olonomi (fare, xG = Rθ + x0
G, ove G e il baricentro del disco, θe un angolo tra un raggio del disco e una retta del piano π, e x0
G scandisce la suddettafamiglia 1-parametrica). Veniamo alla parte dinamica del vincolo. Le reazioni vincolari chemantengono il disco nel piano fanno senz’altro lavoro virtuale nullo (assenza di attrito). Ilpuro rotolamento si esplica, volta per volta, sui punti materiali P che localmente transitanoper il punto geometrico C di contatto con la retta x. Evidentemente il vincolo esplichera, intutta generalita, una componente ΦT parallela a x non nulla: in caso contrario (ΦT = 0)ci dovremo aspettare slittamento, come un pneumatico sul ghiaccio. Ma la classe deglispostamenti virtuali δP (che coincidono con i possibili, dato che sono indipendenti daltempo) per i suddetti punti materiali P coincide con lo spazio banale nullo 0. Dunque:δL(v) = Φ · δP ≡ 0, che mostra che il vincolo e liscio, nonostante una componente d’attritonon necessariamente nulla.
Consideriamo ora il fondamentale teorema caratterizzante i moti dinamicamente pos-sibili nel caso liscio mediante una ‘condizione variazionale’; questo e classicamente notocomePrincipio di D’Alembert. Sia dato un sistema particellare vincolato St soggetto ad ungenerale sistema di leggi-forza come sopra considerato. Allora [t0, t1] 3 t 7→ OP (t) ∈ St edinamicamente possibile se e soltanto se per ogni t ∈ [t0, t1] e per ogni vettore appartenenteal piano tangente (spostamento virtuale) δP = (δP1, ..., δPn) ∈ TOP (t)St vale la seguente‘condizione variazionale’:
n∑i=1
[mid2
dt2OPi(t)− Fi(OP1(t), ...,
d
dtOPn(t), t)] · δPi = 0.
Osservazione importante. Tale teorema, quando utilizzato per la determinazione degliequilibri, e dunque dei moti ivi di quiete, si dicePrincipio dei Lavori Virtuali: La configurazione OP ∗, compatibile col vincolo, e d’e-quilibrio se e solo se
n∑i=1
Fi(OP∗1 , ..., OP
∗n , 0...., 0, t) · δPi = 0, ∀δP ∈ TOP ∗St.
32

Dimostrazione (del Principio di D’Alembert). Supponiamo che [t0, t1] 3 t 7→ OP (t) ∈ Stsia dinamicamente possibile, allora il vincolo esplica delle reazioni vincolari tali che
mid2
dt2OPi(t) = Fi(OP1(t), ...,
d
dtOPn(t), t) + Φi(t)
conn∑i=1
Φi(t) · δPi = 0, ∀δP ∈ TOP (t)St,
dato che il vincolo e liscio; dunque, vale la condizione variazionale.Viceversa, la curva [t0, t1] 3 t 7→ OP (t) ∈ St sia compatibile col vincolo e per essa valga
la condizione variazionale. Definiamo le seguenti funzioni del tempo
Ψi(t) := mid2
dt2OPi(t)− Fi(OP1(t), ...,
d
dtOPn(t), t).
La condizione variazionale ci dice che per ogni istante t ∈ [t0, t1] vale
n∑i=1
Ψi(t) · δPi = 0, ∀δP ∈ TOP (t)St.
Dato che tale vincolo esplica tutte e sole le reazioni vincolari soddisfacenti a∑n
i=1 Φi ·δPi =0, in particolare esplichera pure le Ψi(t), e cio e quanto ci basta per dire che il moto edinamicamente possibile.
Si noti che uno degli aspetti operativi piu importanti di tale teorema e che i motidin. poss. si caratterizzano senza introdurre (e calcolarle) le reazioni vincolari. Questoconsentira, nel caso liscio olonomo bilaterale (eventualmente dipendente dal tempo), lacostruzione della dinamica mediante le equazioni di Lagrange.
1.8 Cinematica e dinamica elementare dei sistemi particel-lari
Sia dato un sistema di riferimento inerziale (O, ei), i = 1, 2, 3 e consideriamo un sistemadi punti materiali (sistema particellare) S = (OPi,mi), i = 1, . . . , n, ove mi > 0 e lamassa del punto Pi e OPi il raggio vettore dall’origine. Cominciamo introducendo alcunedefinizioni elementari. Il baricentro di S e il vettore
OG :=
∑imiOPi∑imi
=
∑imiOPim
.
Una conseguenza immediata della definizione di baricentro e che
mvG = mdOG
dt=∑i
mivi = P
33

ove P indica la quantita di moto di S. Definito il baricentro G, ha senso introdurre ilsistema (non inerziale) (G, ei), detto sistema del baricentro, con origine coincidente conG ed assi sempre paralleli a quelli di (O, ei), per cui si ha (formula di composizione dellevelocita)
ω(τ) = 0, v(τ) = vG, vi = v(τ)i + v
(r)i = vG + v
(r)i .
Si dimostrano facilmente le seguenti relazioni∑i
miGPi =∑i
mi(OPi −OG) = mOG−mOG = 0
da cui, derivando rispetto a t,
0 =d
dt
∑i
miGPi =∑i
miv(r)i = P (r).
Inoltre si ha per l’energia cinetica
2T =∑i
miv2i =
∑i
mi(v(r)i + vG)2 =
∑i
miv(r)2
i +mv2G + 2vG · P (r),
da cui segue il Teorema di Konig
TS =1
2mv2
G + T (r).
Sia A un punto (fisso o mobile) nel riferimento inerziale; il momento angolare o momentodella quantita di moto di S rispetto al polo A e
MA =∑i
APi ∧mivi
Usando la formula di variazione del momento di un sistema di vettori applicati al variaredel polo si ha subito
MA = AG ∧ P +MG
ed essendo inoltre
MG =∑i
GPi ∧mivi =∑i
GPi ∧mi(v(r)i + vG) =
∑i
GPi ∧miv(r)i = M
(r)G
si ha l’analogo del Teorema di Konig per il momento angolare
MA = AG ∧ P +M(r)G
34

1.8.1 Equazioni Cardinali
Sia S un sistema di n punti materiali di masse mi, i = 1, . . . , n. Suddividiamo le forzeagenti sull’ i-esimo punto del sistema in due classi: le forze interne F inti , ovvero dovuteall’azione degli altri punti del sistema sul punto i-esimo, per le quali possiamo dare larappresentazione
F inti =n∑j=1
fij , fii = 0, i = 1, . . . , n,
ove fij ∈ R3 indica la forza agente su i dovuta all’azione di j; e le forze esterne F exti chedescrivono l’effetto sul punto i di corpi non appartenenti al sistema S. Questa distinzionetra forze esterne e interne e complementare a quella di uso frequente tra forze attive e forzevincolari; la sua utilita sta nel fatto che per le forze interne si fa l’ipotesi, importantissimaper gli sviluppi che vogliamo trarre, che esse siano un sistema equilibrato di forze (si vedail Capitolo sui Vettori Applicati):
Rint = 0, N intO = 0.
Da tale ipotesi si ricavano le equazioni cardinali per il sistema particellare S, ovvero unsistema di 3 piu 3 equazioni differenziali scalari che sono necessariamente soddisfatte lungoi moti OPi(t) dinamicamente possibili per il sistema ovvero soddisfacenti a
miOPi = F exti + F inti , i = 1, . . . , n.
Sommando sull’indice di particella i troviamo infatti che necessariamente
maG =
n∑i=1
miOPi = Rext +Rint = Rext (Prima Equazione Cardinale)
Sia ora OA(t) la traiettoria del polo A rispetto al sistema inerziale di origine O usato perdescrivere il moto di S, di modo che si ha immediatamente che
OPi = OA+APi, e vi = vA +d
dt(APi).
Indichiamo con
MA =n∑i=1
miAPi ∧ vi
il momento della quantita di moto rispetto al polo A; la sua derivata lungo un motodinamicamente possibile vale
MA =
n∑i=1
mi(vi − vA) ∧ vi +
n∑i=1
miAPi ∧ ai =
= −vA ∧ P +n∑i=1
APi ∧ (F exti + F inti ) =
= −vA ∧ P +N extA +N int
A = −vA ∧ P +N extA
35

MA = −vA ∧ P +N extA (Seconda Equazione Cardinale)
Osservazione. Le equazioni cardinali costituiscono un sistema di 6 equazioni che de-vono essere necessariamente soddisfatte lungo il moto. E’ chiaro intuitivamente che, se ilsistema S ha piu di 6 gradi di liberta, le equazioni cardinali non possono essere sufficienti adeterminare completamente il moto del sistema. Infatti, esse sono sufficienti a determinaresolo il moto del baricentro G, attraverso la prima equazione cardinale, e l’evoluzione delmomento della quantita di moto MA. Per una particolare classe di sistemi, i corpi rigidiprivi di ulteriori vincoli, le equazioni cardinali risultano essere esattamente equivalenti alsistema delle equazioni descrivente i moti dinamicamente possibili.
1.8.2 Cinematica dei sistemi particellari rigidi
Sia ora S sistema rigido e denotiamo con ω la velocita angolare assoluta di S. Mostriamopreliminarmente che:
Proposizione 1.8.1 Se S e rigido, allora G e solidale a S, ovvero
vG = vi + ω ∧ PiG, ∀ i = 1, . . . , n.
Infatti, fissato j ∈ 1, . . . , n,
mvG =∑i
mivi =∑i
mi(vj + ω ∧ PjPi) = mvj + ω ∧∑i
miPjPi,
ed essendo PjPi = GPi −GPj , si ha
mvG = mvj + ω ∧∑i
mi(GPi −GPj) = m(vj + ω ∧ PjG).
Ne segue che il sistema S ′ = S ∪ (OG, 0) e ancora un sistema rigido e in (G, ei) ilmoto di S ′ ha un punto fisso G. Inoltre, da ω(τ) = 0, usando la formula di composizionedelle velocita angolari nei moti rigidi si ha che
ω = ω(τ) + ω(r) = ω(r).
Per un generico sistema rigido con un punto fisso A, il momento angolare e l’energia cineticaammettono l’espressione seguente (si usa la formula del doppio prodotto vettore)
MA =∑i
APi ∧mivi =∑i
miAPi ∧ (ω ∧APi) =
=∑i
mi(AP2i ω − (APi · ω)APi) =
∑i
mi(AP2i I−APi ⊗APi)ω = IAω
36

ove a⊗ b ∈M(n) indica la matrice prodotto tensore dei due vettori a, b ∈ Rn
(a⊗ b)u := a(b · u) ∀u ∈ Rn
eIA =
∑i
mi(APiI−APi ⊗APi) ∈M(n)
e il tensore d’inerzia del sistema (rigido) di punti materiali. Si tratta di un oggetto chedipende dalla sola geometria della distribuzione delle masse del sistema rigido.
Prima di studiare le proprieta del tensore d’inerzia, ricaviamo l’espressione dell’energiacinetica per un generico sistema rigido con un punto fisso
2TS =∑i
miv2i =
∑i
mi(ω ∧APi)2 =∑i
miω ∧APii · ω ∧APii =
=∑i
miω ·APi ∧ (ω ∧APi) = ω ·∑i
miAPi ∧ (ω ∧APi) = ω · IAω.
Nel caso particolare di G punto fisso nel sistema del baricentro e ω(r) velocita angolare delsistema rispetto al riferimento del baricentro, otteniamo l’analogo delle formule di Konigper un sistema rigido
TS =1
2mv2
G +1
2ω · IGω, (1)
MA = AG ∧ P + IGω. (2)
Proprieta del tensore d’inerzia
1) IA e operatore simmetrico (e quindi diagonalizzabile). Rispetto alla base (O, ei) siha infatti
(IA)ij = ei · IAej =∑k
mk(AP2k ei · ej −APk · eiAPk · ej) = (IA)ji
2) Sia ω = |ω|u, ove u= vers ω. Allora
T =1
2ω · IAω =
ω2
2u · IAu =
ω2
2Iu (3)
oveIu := u · IAu =
∑i
mi(u ∧APi)2 =∑i
mid2i ≥ 0
e il momento d’inerzia del sistema rispetto alla retta per A e parallela al versore u.Esso coincide con la somma delle masse per le distanze al quadrato dei punti Pi dallaretta per A. Come si vede subito, Iu non varia se si considera un altro punto A′ sulla
37

retta definita da (A, u). Dalla (3) si deduce che IA, simmetrico e definito positivoovvero
ω · IAω ≥ 0, ω · IAω = 0 ⇔ ω = |ω|u = 0,
tranne che nel caso in cui esista u∗ tale che I∗u = 0. In tal caso i punti di S sonodisposti tutti lungo una retta parallela a u∗ e S e solido degenere (asta).
3) Formula di variazione del momento d’inerzia (Teorema di Huygens–Steiner). Con-sideriamo le rette parallele al versore u per i punti A e G, baricentro di S; non erestrittivo supporre che sia d = |AG| la distanza tra le rette. Allora (vedi figura)
AAAAAK
A
Pi.
G
d
I(A)u =
∑i
mi(u ∧APi)2 =∑i
mi[(u ∧AG) + (u ∧GPi)]2 =
=∑i
mi[(u ∧AG)2 + (u ∧GPi)2 + 2(u ∧AG) · (u ∧GPi)],
da cuiI(A)u = md2 + I(G)
u
Esercizio. Mostrare che la relazione precedente e un caso particolare della formula
IO = IG +mOG⊗OG.
4) Momenti principali d’inerzia. Supponiamo per semplicita A coincidente con l’originedel riferimento inerziale, per cui OPi = (xi, yi, zi). I termini sulla diagonale di IOsono detti momenti principali d’inerzia. Si ha ad esempio per e3
(IO)33 = e3 · IOe3 = I(O)e3 =
∑i
mi(OPi ∧ e3)2 =
=∑i
mi(OP2i − (OPi · e3)2) =
∑i
mi(x2i + y2
i + z2i − z2
i )
=∑i
mi(x2i + y2
i ).
38

I termini extra–diagonali sono detti momenti deviatori
(IO)23 = e2 · IOe3 =∑i
mi(−yizi)
5) Solidi piani (lamine). Sia e3 perpendicolare al piano che contiene il sistema. Allorazi = 0 per ogni i = 1, . . . n e
I1 =∑i
mi(x2i + y2
i + 0− x2i ) =
∑i
miy2i , I2 =
∑i
mix2i
e si haI
(O)3 = I
(O)2 + I
(O)1 .
39

1.9 Teorema di Conservazione dell’Energia
Consideriamo un sistema vincolato di n particelle di masso mi > 0, i = 1, ..., n con vin-colo liscio S ⊂ R3n, indipendente dal tempo (fisso), bilaterale (senza bordo), e soggettoad un sistema di forze (interne e/o esterne) di tipo conservativo di Energia PotenzialeU(OP1, ..., OPn), quindi: Fi(OP1, ..., OPn) = −gradOPiU(OP1, ..., OPn). Allora l’EnergiaTotale:
E : R6n −→ R
E(OP1, ..., OPn, OP 1, ..., OPn) :=1
2
n∑i=1
mi|OP i|2 + U(OP1, ..., OPn)
e costante lungo i moti dinamicamente possibili.
Prova. I moti dinamicamente possibili per tale sistema sono tutte e sole le curve t 7→ OP (t)tali che il vincolo e capace di esplicare reazioni vincolari t 7→ Φi(t), i = 1, ..., n per cui, perogni i = 1, ..., n
miOP i(t) = Fi(OP1, ..., OPn) + Φi(t),
ed il vincolo e geometricamente soddisfatto: OP i(t) ∈ S. Lungo tali curve
d
dtE(OP1(t), ..., OPn(t), OP 1(t), ..., OPn(t)
)=
=
n∑i=1
miOP i(t) · OP i(t) +
n∑i=1
gradOPiU(OP1(t), ..., OPn(t)) · OP i(t) =
=n∑i=1
Φi(t) · OP i(t).
Dobbiamo considerare ora due fatti: primo, il vincolo e liscio bilaterale, dunque puosviluppare tutte e sole le reazioni vincolari che fanno lavoro virtuale identicamente nullo
δLΦ =
n∑i=1
Φi · δPi = 0,
per ogni spostamento virtuale (δPi)i=1,...,n ∈ TOPS; secondo, il vincolo e fisso, dunque ivettori velocita lungo i moti sono spostamenti virtuali (affermazione che non e vera nelcaso di vincolo mobile, dipendente dal tempo), pertanto:
d
dtE(OP1(t), ..., OPn(t), OP 1(t), ..., OPn(t)
)= ... =
n∑i=1
Φi(t) · OP i(t) = 0.
40

1.10 La restrizione di un sistema di forze conservativo econservativa
Consideriamo un sistema di n particelle libere, soggette ad un sistema conservativo di forze;cioe, esiste una funzione energia potenziale
U : R3n −→ R, (OP1, ..., OPn) 7−→ U(OP )
tale che la forza esercitata sulla particella i−esima dovuta alla presenza di tutte le altrenelle configurazioni OP1, ... e data da
Fi : R3 × ...× R3 −→ R3, Fi(OP ) := −gradOPiU(OP1, ..., OPi, ..., OPn)
In altri termini, l’insieme delle n funzioni 3-vettori forze Fi si puo interpretare come l’in-sieme delle componenti di una forma differenziale esatta (la forma ‘lavoro’ δLF ) in R3n dicui −U e la primitiva:
δLF =n∑i=1
Fi(OP1, ..., OPn) · dOPi =
= −n∑i=1
gradOPiU(OP1, ..., OPi, ..., OPn) · dOPi = −dU
Supponiamo ora di vincolare il nostro sistema in maniera olonoma, cioe mediante un vincolosulle configurazioni S ⊂ R3n, dimS = N < 3n di cui RN 3 q = (qh)h=1,...,N 7→ OP =
OP (q) ∈ R3n sia la generica immersione/rappresentazione locale del vincolo. Ha dunquegeometricamente senso definire la forma differenziale lavoro ristretta alla varieta vincolareS; tale operazione e ben definita per ogni forma differenziale: (i) le componenti si valutano
non piu in generici OP di R3n ma solo sui punti appartenenti a S, cioe su OP (q) con qarbitrario nel suo dominio di definizione (un aperto di RN ) e (ii) tale forma ristretta nonla si valuta piu su generici vettori di R3n bensı sui soli vettori tangenti ad S nei puntiOP (q) ove si sono valutate le componenti della forma. Ricordando che i vettori tangentisi ottengono come immagine del differenziale dell’immersione vincolare, possiamo scriverela nuona forma differenziale ristretta:
δLF |S =n∑i=1
Fi(OP (q)) ·N∑h=1
∂OP i(q)
∂qhdqh (∗)
Ricordiamo che δLF e esatta,
δLF |S = −n∑i=1
gradOPiU(OP1, ..., OPi, ..., OPn)∣∣∣OP=OP (q)
·N∑h=1
∂OP i(q)
∂qhdqh
41

ricordando il teorema di differenziazione delle funzioni composte
δLF |S = −N∑h=1
∂
∂qh[U OP ](q) dqh = −dU ,
doveU : RN −→ R, q 7→ U(q) := U(OP (q))
Abbiamo ottenuto il seguente risultato: in generale, la restrizione di una forma esatta eesatta, e la sua primitiva e la restrizione della originale primitiva. Nel nostro caso (dellameccanica): la restrizione di una forma lavoro conservativa e conservativa e la energiapotenziale del sistema ristretto e data dall’energia potenziale originale composta con larappresentazione vincolare.
Ritorniamo sulla (∗) e nel caso non necessariamente conservativo (Fi = Fi(OP, OP )):
δLF |S =n∑i=1
Fi
(OP (q),
N∑k=1
∂OP (q)
∂qkqk)·N∑h=1
∂OP i(q)
∂qhdqh (∗)
riorganizzando le sommatorie (possiamo scambiarle come meglio crediamo):
δLF |S =N∑h=1
[ n∑i=1
Fi
(OP (q),
N∑k=1
∂OP (q)
∂qkqk)· ∂OP i(q)
∂qh
]dqh =
N∑h=1
Qh(q, q)dqh
le Qh(q, q) =[...]
sono dette le Componenti Lagrangiane della Sollecitazione; solo nel
caso di forze posizionali (Fi = Fi(OP )) sono interpretabili come componenti di formedifferenziali nel senso standard dell’Analisi e della Geometria.
1.11 Sistemi continui (di infinite particelle) a finiti gradi diliberta
Per semplicita, nel caso olonomo, ci siamo limitati in questi appunti a sistemi materiali din particelle. Se per ogni t la varieta vincolare St e senza bordo (non ci sono configura-zioni di “confine”), allora, localmente, possiamo rappresentare tale varieta mediante delleimmersioni locali
RN × R 3 (qh, t) 7−→ OPi(qh, t) ∈ St ⊂ R3n.
Molto spesso in meccanica finito-dimensionale dobbiamo trattare con sistemi compostida infinite particelle vincolate tra loro in maniera tale che il sistema risultante e a finitigradi di liberta; basti pensare, per esempio, ai sistemi articolati di corpi rigidi. Da unpunto di vista non solo formale e estremamente utile pensare anche per questi sistemi a
42
delle rappresentazioni vincolari mediante delle immersioni locali analoghe alle precedenti.Il punto qualitativamente diverso consiste nel fatto che ora, invece dell’indice discreto diparticella i ∈ 1, ..., n, avremo un indice continuo y = (y1, ..., yd) ∈ C∗ ⊂ Rd, ove d vale1, 2, oppure 3, in relazione al fatto che il nostro corpo materiale di infinite particelle siarispettivamente 1- , 2- , oppure 3-dimensionale. Dunque:
Rd × RN × R 3 (yα, qh, t) 7−→ OP (yα, qh, t) ∈ R3
rappresenta la configurazione assunta dalla particella y ∈ C∗, quando, al tempo t, i para-metri lagrangiani valgono q ∈ RN . Esempio: corpo rigido. Si consideri una terna solidale alrigido e sia C∗ l’insieme dei punti di R3 rappresentanti il rigido; in questo caso N = 6: treparametri per il baricentro (oppure, se vogliamo, l’origine della terna), tre altri parametriper la rotazione (cioe tre parametri descriventi localmente SO(3), per esempio gli angolidi Euler).
Un’applicazione di tali rappresentazioni. Supponiamo esista un campo di forze ta-le che se poniamo una particella di massa m in OP questa sia soggetta alla forza f =−mgradR3U(OP ), ove R3 3 OP 7→ U(OP ) ∈ R e una densita per unita di massa di energiapotenziale. Si consideri ora un sistema di infinite particelle come sopra, con vincoli indipen-denti dal tempo. Dimostriamo che il lavoro (virtuale, possibile) di tale campo di forze sulsistema e (ancora) conservativo e calcoliamo l’ energia potenziale lagrangiana U(qh) il cuigradiente in RN (col segno meno) esprime le componenti lagrangiane della sollecitazione(vedi p.e. (3.38) di AMR). Scriviamo dunque il lavoro di tali forze sul sistema e sia µ(y)la densita di massa in C∗.
δL = −∫y∈C∗ µ(y)gradR3U(OP (y, q)) · gradRNOP (y, q)δqdy,
= −∫y∈C∗ µ(y)
∑3l=1
∂∂xl
U(OP (y, q))∑N
h=1∂∂qh
xl(y, q)δqhdy,
= −∑N
h=1∂∂qh
[∫y∈C∗ µ(y)U(OP (y, q))dy]δqh.
L’energia potenziale e pertanto data da
U(q) =
∫y∈C∗
µ(y)U(OP (y, q))dy.
Esercizio. La terna cartesiana Oxyz ruota uniformemente rispetto agli spazi inerziali convelocita angolare di trascinamento ω = ωz. Una lamina materiale C∗ omogenea di massam e vincolata senza attrito sul piano Oxz. L’accelerazione di gravita e g = −g z, cioe l’assez si dice ‘verticale ascendente’. Determinare l’energia potenziale lagrangiana U(q) dovutaalla forza gravitazionale e a quella centrifuga.
Il generico punto materiale della lamina e indicato con y = (X,Z) ∈ C∗, mentre lagenerica configurazione assunta dalla lamina e caratterizzata dai parametri Lagrangiani
43

q = (x, z, θ) ∈ R2×S1 dove G = (x, z) e la posizione del baricentro e θ e l’ angolo formatocon una direzione invariante del sistema, infine µ : C∗ → R+ e la densita (superficiale) dimassa della lamina.
Gravita:Fg = mg = −∇OP (−mg ·OP )Allora per unita di massa si ha:U(OP ) = −g ·OPδL(F ) = mg · dP = −d(−mg ·OP )Quindi:
Ug(q) =
∫y∈C∗
µ(y)U(OP (y, q)) dy = −∫y∈C∗
µ(y)g ·OP (y, q) dy =
= −g
∫y∈C∗
µ(y) ·OP (y, q) dy
Ora usando la definizione di baricentro e il fatto che∫y∈C∗ µ(y)dy = m si ha:
Ug(q) = −mg ·OG(q) = mgz
Centrifuga:Per unita di massa si ha:U(OP ) = −ω2
2 |P′P |2,
dove P ′ e il punto proiezione ortogonale di P sull’asse di rotazione z. Quindi:
Ucentr(q) =
∫y∈C∗
µ(y)U(OP (y, q)) dy =
∫y∈C∗
µ(y)
(−ω
2
2
) ∣∣P ′P (y, q)∣∣2 dy =
= −ω2
2
∫y∈C∗
µ(y)∣∣P ′P (y, q)
∣∣2 dy = −ω2
2Iz(q)
Per il teorema di Huygens-Steiner si ha:
−ω2
2Iz(q) = −ω
2
2
(mx2 + Iz′(θ)
)= −ω
2
2
(mx2 + nT (θ) IG n(θ)
)Dove n(θ) e il versore dell’asse z′, parallelo a z e passante per il baricentro della lamina,rappresentato nella base (G;X,Y, Z) solidale alla lamina in cui si costruisce la matriced’inerzia IG.
44

1.12 Appendice: Il Principio di Gauss
Si consideri un sistema di n particelle soggette al vincolo olonomo Σ, localmente descrittoda
Σ =loc. OP ∈ R3n : f(OP ) = 0, dove f : U ⊂ R3n → Rk, rk df∣∣Σ
= k. (4)
Il luogo Σ e pertanto una varieta N = 3n− k dimensionale, dato che considereremo senzarestrizioni buona regolarita per f ∈ Cr, r ≥ 1. Il nucleo del differenziale di f in un punto8
x = OP = (OP1, OP2, ..., OPn)
risolvente f(OP ) = 0 rappresenta i vettori del locale piano tangente TxΣ, gli ‘spostamentivirtuali’ δP :
df(OP )δP = 0 (5)
Consideriamo una generica curva γ : I −→ R3n a valori in Σ e γ(0) = OP ; dunque:
f(γ(t)) ≡ 0. (6)
Derivando rispetto al parametro d’evoluzione e valutando in t = 0 otteniamo esattamentela relazione ( 5) caratterizzante le velocita cinematicamente compatibili col vincolo Σ:
df(OP )γ(0) = 0 (7)
Derivando due volte e valutando in t = 0 otteniamo:
〈d2f(OP )γ(0), γ(0)〉+ df(OP )γ(0) = 0. (8)
Da un punto di vista un po’ piu formale possiamo richiamare il seguente fatto: se da un latogli elementi del fibrato tangente TΣ sono del tipo (γ(0); γ(0)) risolventi ( 7), gli elementidel ‘secondo’ fibrato tangente T 2Σ sono del tipo (γ(0); γ(0), γ(0)), naturalmente al variarearbitrario di curve γ a valori in Σ, dunque risolventi le relazioni ( 7) e ( 8). Consideriamola mappa di proiezione
τ2,1 : T 2Σ −→ TΣ, (9)
(x; v, a) 7→ (x; v), dove df(x)v = 0 e 〈d2f(x)v, v〉+ df(x)a = 0 (10)
Si definiscono i vettori di T 2Σ verticali rispetto a τ2,1 tutti e soli del tipo (x; 0, a), cioe
df(x)a = 0, (11)
e dal punto di vista cinematico rappresentano, per un assegnato ‘atto di moto’ (x; v) diTΣ, le variazioni possibili in accelerazione compatibili col vincolo Σ a partire da (x; v). In
8Scriveremo: x = OP, v = OP , a = OP .
45

altri termini: se un vettore di T 2Σ e dato da (x; v, a), allora ogni altro vettore di T 2Σ,compatibile con un prefissato atto di moto (x; v) ∈ TΣ, si ottiene sommando (solo sullefibre vettoriali, sopra lo stesso punto x) a (x; v, a) tutti e soli i vettori verticali (x; 0, δa)con df(x)δa = 0, ottenendo cosı: (x; v, a+ δa).
Naturalmente alla stessa conclusione giungiamo se, invece di rappresentazioni implicite(f = 0) del vincolo, lavoriamo con immersioni vincolari del tipo (N = 3n− k):
OP : V ⊂ RN −→ R3n
(q1, ..., qN ) = q 7−→ OP (q).(12)
v = dOP (q)q, a = 〈d2OP (q)q, q〉+ dOP (q)q. (13)
Le variazioni di accelerazione δa, per fissato atto di moto, dunque per δq = 0, si ottengonoper
δa = dOP (q)δq (14)
per arbitrari δq. Quest’ultima relazione e la stessa caratterizzante gli spostamenti virtuali
δP = dOP (q)δq, (15)
per arbitrari δq.
E nodo cruciale nel Principio di Gauss il fatto che la relazione caratterizzante i vettoriverticali ( 14) sia esattamente la relazione caratterizzante gli ‘spostamenti virtuali’ ( 15).
Assegnate delle generiche funzioni-forza F (OP, OP ), consideriamo la funzione di Gauss:
G : T 2Σ −→ R
(q; q, q) 7→ G(q; q, q) :=∑n
i=1
∣∣mi OP i−Fi∣∣22mi
,(16)
ove s’intende OP = 〈d2OP (q)q, q〉+ dOP (q)q e F = F(OP (q), dOP (q)q
).
Principio di Gauss: Un moto compatibile col vincolo olonomo e liscio Σ, dunque del tipo
OP (t) = OP (q(t)), I 3 t 7→ q(t) ∈ RN , (17)
e dinamicamente possibile se e solo se, per ogni istante in cui e definito, la funzione diGauss ivi valutata e minima per ogni variazione verticale dell’accelerazione, ovvero:
δvG := dG(q(t); q(t), q(t)
)(q(t); 0, δq
)= 0, ∀ δq,
δ2vG :=
⟨d2G
(q(t); q(t), q(t)
)(q(t); 0, δq
),(q(t); 0, δq
)⟩> 0, ∀ δq 6= 0.
(18)
46

Osservazione. Si noti il significato della funzione di Gauss: per ogni configurazione OP ,distribuzione di velocita OP , e distribuzione di accelerazioni OP , consentite dal vincolo, Gmisura la somma su tutte le particelle della norma quadrato delle deviazioni di miOP i daFi, quantita quest’ultima candidata ad essere la reazione vincolare, a quell’istante lungoquel moto, sulla particella i-esima. La distribuzione dinamicamente possibile di accelera-zioni e appunto, nel caso dei vincoli lisci, quella in corrispondenza della deviazione minima,a parita d’atto di moto (OP (t), OP (t)).
Prova. CalcoliamoδvG = dG
(q(t); q(t), q(t)
)(q(t); 0, δq
)=
=n∑i=1
(miOP i(t)− Fi(OP (t), OP (t))
)· dOP i(q(t))δq,
e per le ( 14) e ( 15),
δvG =
n∑i=1
(miOP i(t)− Fi(OP (t), OP (t))
)· δPi, (19)
dunque δvG e zero se e solo se vale il Principio di D’Alembert ( 19), caratterizzante appunto imoti dinamicamente possibili nel caso liscio. Tali punti stazionari sono in effetti dei minimi:
δ2vG =
n∑i=1
mi δPi · δPi > 0.
47
48

Capitolo 2
Il Problema dei Due Corpi e laMeccanica Celeste
2.1 Premessa
Non si puo dire che la descrizione antica e medioevale della meccanica celeste non fosseefficiente.
Il punto piu alto di quel mondo pre-newtoniano fu l’opera monumentale in 13 volumi diClaudio Tolomeo (II secolo d.C.), la Grande Sintassi Matematica, piu nota col nome arabodi Almagesto, in cui fu esposto il suo sistema geocentrico: il complesso delle stelle fisse edel sistema solare fu rappresentato mediante 52 moti circolari uniformi, deferenti e epicicli,utilizzandone al piu 5 (Marte) per corpo celeste. La sovrapposizione di pochi moti circolariuniformi era – e, diciamo– sufficiente per descrivere i corpi celesti con un’approssimazionefine confrontabile con le osservazioni astronomiche. Al moderno lettore con cultura mate-matica –lo studente di fisica, di matematica, di ingegneria– non e molto difficile riconoscerel’analogia tra tale sviluppo in epicicli e la decomposizione in serie di Fourier di moti perio-dici. Quest’analogia fu indicata espressamente per la prima volta da Schiaparelli (1926), ecome mette in evidenza Lucio Russo ne “La rivoluzione dimenticata”, Feltrinelli 1996, sipuo sospettare che fosse chiara anche ai pionieri di tali sviluppi in serie, e cioe a DanielBernoulli e allo stesso Joseph Fourier, i quali furono pure cultori l’uno di meccanica celeste,l’altro di cultura egizia ed alessandrina. Una ricostruzione tecnica di tale analogia si trovanella nota di Giovanni Gallavotti “I moti quasi periodici da Ipparco a Kolmogorov” (Notedell’Accademia Naz. dei Lincei). Ma il gia citato moderno lettore matematico troveratutto cio deliziosamente descritto nel saggio di Donald G. Saari “A Visit to the NewtonianN-body Problem via Elementary Complex Variables”, American Mathematical Monthlypp.105-119, February 1990.
49
Perche dunque abbandonare tale descrizione potente ed efficiente? Perche sostituirequella descrizione pragmatica con una “legge fisica”?
Clifford A. Truesdell, in un ormai famoso (e provocatorio) pamphlet “Il calcolatore:rovina della scienza e minaccia per il genere umano”, La nuova ragione, Scientia/Il Mulino1981, giunge addirittura al seguente scenario. Se nel XVII secolo fossero esistiti i calcola-tori, non ci sarebbe stata alcuna forte pulsione per tentare una ricostruzione matematicaunitaria quale quella formidabile di Isaac Newton, non sarebbe servita, forse sarebbe statacontroproducente: la “macchina” epicicloidale esistente, e sempre eventualmente perfetti-bile mediante l’aggiunta di nuovi epicicli, sarebbe apparsa piu che adeguata per il calcolocomputerizzato.
Tale pessimismo va naturalmente rimeditato. Ma va pure detto che lo sviluppo scien-tifico mediante il paradigma delle “leggi” fu una peculiarita di quella scienza che nacquee si sviluppo attorno al bacino mediterraneo; presso altre civilta in evoluzione presero ilsoppravvento differenti itinerari di pensiero: la scienza cinese, benche tecnologicamentepiu avanzata nell’antichita, mai si sviluppo in termini di leggi (si veda per esempio JosephNeedham, Scienza e Civilta in Cina, Einaudi 1983).
I motivi della decadenza dell’antica teoria tolemaica e del nascere della nuova scienzasono indissolubilmente legati alla storia e allo sviluppo di tutto il pensiero scientifico diquel periodo, marcato da Copernicus, Kepler e Galilei. Non furono neppure estranee mo-tivazioni estetiche e mistico-religiose. Ma fu fondamentalmente la necessita di organizzareunitariamente i dati astronomici e di predire i moti, che porto alla enunciazione Kepleria-na, le tre leggi, e successivamente alla potente sintesi Newtoniana, la legge di gravitazioneuniversale assieme ad un solido formato teorico di equazioni differenziali caratterizzanti imoti dinamicamente possibili.
Come in altri capitoli, i primi paragrafi sono di lettura consequenziale; negli ultimi(teorema di Bohlin ed altri) a volte e necessario il formalismo Lagrangiano-Hamiltoniano
50

della Meccanica Analitica e il Calcolo delle Variazioni. Nonostante questi siano sviluppatiin capitoli successivi, si e ritenuto, per un senso unitario dell’esposizione, di proporreugualmente in questo capitolo questi argomenti non didatticamente ordinati, ma coerenticol problema dei due corpi.
2.2 Moti Piani
Indichiamo (come al solito) con E3 uno spazio euclideo, cioe uno spazio affine 3-dimensionaledotato del prodotto scalare pitagorico: x ·y :=
∑3i,j=1 δijxiyj =
∑3i=1 xiyi. Identificheremo
sempre lo spazio vettoriale associato con R3.Una curva P = P (t) in E3 di classe C2 e un moto piano se esiste un piano π, cioe una
sottovarieta affine 2-dimensionale π di E3, che contenga il sostegno di tale curva.Dato un moto piano, attacchiamo un opportuno riferimento ad E3, cioe una scelta di
un punto O di E3 e di tre vettori (di base) orto-normali ei ∈ R3 in modo tale che
π = P ∈ E3 : OP = P −O = x1e1 + x2e2, ∀(x1, x2) ∈ R2.
Dunque il nostro moto si rappresentera cosı: t 7→ x1(t)e1 +x2(t)e2, ma anche, qualora nonsusciti ambiguita: t 7→ (x1(t), x2(t)). Descriviamolo pure in coordinate polari su π:
t 7→ r(t)er(t).
Qui r := |OP |, e θ e l’angolo dalla semiretta orientata O + R+e1 al vettore posizioneOP , orientato in senso antiorario, come osservato dal semi-spazio x3 > 0. Il vettoreer := OP/|OP | e il versore radiale, il versore eθ, versore trasverso, e ortogonale a er ed etale per cui la coppia (er, eθ) e congruente alla coppia (e1, e2),
er = cos θe1 + sin θe2, eθ = − sin θe1 + cos θe2.
Si calcolano facilmente le derivate dei versori mobili di base associati ad un moto:
er = (− sin θe1 + cos θe2)θ = θeθ, eθ = −(cos θe1 + sin θe2)θ = −θer.
Abbiamo gli ingredienti per rappresentare nella base mobile (er, eθ) velocita ed accelera-zione:
v = OP =d
dt(rer) = rer + rer = rer + rθeθ.
a = OP =d2
dt2(rer) = rer + rer + rθeθ + rθeθ + rθeθ = (r − rθ2)er + (rθ + 2rθ)eθ.
Diremo dunque accelerazione radiale:
ar = r − rθ2
51

ed accelerazione trasversa:
aθ = rθ + 2rθ.
Interpretiamo quest’ultimo termine. Si vede che, per r 6= 0,
raθ = r2θ + 2rrθ =d
dt(r2θ).
Mostriamo che
A :=1
2r2θ
e la velocita areolare dell’area spazzata dal vettore posizione OP = rer lungo il moto instudio. L’area spazzata in un intervallo di tempo [t, t+ ∆t] e, a meno di o(∆t), l’area di untriangolo, ove |v|∆t e la “base” e |OP ∧ vers v| e l’“altezza”, entrambe valutate al tempot.
∆A =1
2|rer ∧ vers v| |v|∆t+ o(∆t) =
1
2|rer ∧ v| ∆t+ o(∆t) =
1
2r2θ∆t+ o(∆t),
da cui rapidamente la conclusione:
A = lim∆t→0
∆A
∆t=
1
2|OP ∧ v| = 1
2r2θ.
2.3 Moti Centrali
Una curva OP = OP (t) in R3 di classe C2 e un moto centrale di centro il punto fisso O seper ogni istante t in cui e definito vale
OP ∧ OP = 0,
cioe, l’accelerazione e parallela al vettore posizione OP .
Teorema. Ogni moto centrale e piano con velocita areolare costante.
Prova. Se il moto e centrale vale
d
dt(OP ∧ OP ) = OP ∧ OP +OP ∧ OP = 0,
dunque si conserva la quantita vettoriale MO = OP ∧ OP , il cui significato e di Momentodella Quantita di moto, o Momento angolare, rispetto al polo O, per una particella di massam = 1 che evolva lungo il moto in studio.
Supponiamo MO 6= 0. Consideriamo il riferimento con origine in O e versore e3 =vers MO = MO/|MO|. Evidentemente il moto evolve nel piano (O, e1, e2) poiche OP eOP rimangono definitivamente ortogonali a e3.
52

Supponiamo ora MO = 0. Abbiamo che OP || OP perche il moto e centrale e abbiamoche OP || OP perche MO = 0. Quindi: OP || OP . Usando la rappresentazione di Frenetabbiamo OP = st, OP = st + s2/ρ n, pertanto dev’essere definitivamente 1/ρ ≡ 0, cioe,il moto e rettilineo e di collisione con O.
Andiamo a vedere il significato della parte scalare di MO. Otteniamo facilmente
MO = OP ∧ OP = rer ∧ (rer + rθeθ) = r2θe3 = 2Ae3.
Dunque in un moto centrale la velocita areolare e costante:
A =1
2r2θ =
1
2c.
Osservazione. Notiamo che in ogni altro caso diverso dal moto di collisione rettilinea, cioeper c 6= 0, si ha r 6= 0 e θ 6= 0, la prima ci garantisce l’assenza di collisioni diverse da quellarettilinea, l’ultima ci dice che t 7→ θ(t) e un diffeomorfismo.
2.4 Formule di Binet
Mostriamo che in un moto centrale la conoscenza dii) traiettoria geometrica r = r(θ),ii) costante delle aree c = 2A = r2θ,e sufficiente per la ricostruzione delle grandezze cinematiche, velocita e accelerazione,associate a quel moto.
vr = r =dr
dθθ =
dr
dθ
c
r2= −c
d1r
dθ,
vθ = rθ =c
r.
Sara utile nel seguito:
|v|2 = c2[(d1
r
dθ
)2+
1
r2
].
Per l’accelerazione, a = arer,
ar = r − rθ2 =d
dθ
(− c
d1r
dθ
)θ − c2
r3,
infine:
ar = − c2
r2
(d2 1r
dθ2+
1
r
).
Nel seguito, quest’ultima formula sara cruciale nello studio della geometria delle orbite nelproblema dei due corpi.
53

2.5 Sulle Coniche
Le curve coniche sono tutte e sole le curve piane che si ottengono sezionando coni con piani.Un’ulteriore caratterizzazione e la seguente.
Una curva e conica se e solo se per ogni suo punto P e costante il rapporto della distanzadi P da un punto fisso F , detto fuoco, con la distanza di P da una retta detta direttrice,
e :=|PF ||PQ|
=r
|PQ|= costante, eccentricit a.
Posto d := |FD|, vale |PQ| = d− r cos θ, cosı e = rd−r cos θ ,
r =e d
1 + e cos θ.
Avremo
Ellisse : e < 1, Parabola : e = 1, Iperbole : e > 1.
Studiamo un po’ piu in dettaglio l’ellisse.
P
FF1 C
Q
D
K
r
J
54

a: semi-asse maggioreb: semi-asse minoref : semi-distanza focale, f = |CF | = |F1C|
Una nota proprieta caratterizzante un’ellisse e la seguente: vale |F1P | + |FP | =costante(indipendente da P ). Tale costante vale evidentemente 2a, inoltre, pensando il puntorappresentativo P nel perigeo (θ = 0),
2a = r(0) + r(π) =ed
1 + e+
ed
1− e= 2
ed
1− e2,
resta determinato il semi-asse maggiore a in funzione dei due parametri e ed d caratteriz-zanti una generica conica:
a =ed
1− e2.
La distanza focale |F1F | = 2f si determina
2f = r(π)− r(0) =ed
1− e− ed
1 + e= 2
e2d
1− e2,
dunque
f =e2d
1− e2,
ma anchef = ea.
Il parametro dell’ellisse e definito come il prodotto di e e d:
p := ed.
Mediante il parametro p riscriviamo l’equazione θ-parametrica dell’ellisse,
1
r=
1 + e cos θ
p,
e determiniamo alcune relazioni coinvolgenti i due semi-assi: quando P e in K (vedi figura)
2a = 2(f2 + b2)12 ,
cosı
a2 = f2 + b2, b2 = a2 − e2a2 = a2(1− e2) = a2 ed
a,
infine
p =b2
a.
55
2.6 Kepler
Nonostante la forte spinta rivoluzionaria della sua proposta eliocentrica, Copernicus, Derevolutionibus orbium coelestium (1543), non riuscı ad abbandonare l’idea dei moti circolariuniformi e delle loro composizioni. A piu riprese, collezionando risultati di anni, cio riuscıa Kepler. Inizialmente egli penso addirittura a moti ovoidali (un’estremita dell’orbita piustretta dell’altra, si veda per es. a pag. 65 di Giovanni Godoli, “Sfere armoniche. Storiadell’astronomia”, UTET 1993), in seguito rapidamente abbandono tali idee, giungendo allaformulazione delle tre leggi che portano il suo nome. Tali leggi sono di natura puramentedescrittiva e cinematica.
Johannes Kepler
Prima Legge. Le orbite dei pianeti sono ellissi e il Sole e in uno dei fuochi.
Seconda Legge. La velocita areolare e costante.
Terza Legge. Il rapporto del quadrato del periodo con il cubo del semi-asse maggiore,T 2
a3 , e una costante universale.
La prima legge ci dice, in particolare, che i moti sono piani; assieme alla seconda, deduciamofacilmente che per tali moti si conserva il Momento della quantita di moto (qui riferito aduna massa unitaria)
MO = OP ∧ OP = cost.,
dunque, traiamo che i moti sono centrali. Si puo facilmente andare un po’ piu avanti conquesta ricognizione puramente cinematica: Nel riferimento associato al piano dell’orbitaellittica di un pianeta descriviamo con Binet l’accelerazione radiale ar, vale
1
r(θ) =
1 + e cos θ
p,
56

dunque d2
dθ21r = 1
p −1r , cosicche
ar = −c2
p
1
r2,
ove c e p sono costanti per l’orbita in studio. Nel caso ellittico
c =2πab
T, T = periodo, p =
b2
a.
ar = −4π2a2b2
T 2
a
b21
r2= −4π2 a
3
T 2
1
r2,
e per la terza legge a3/T 2 e indipendente dal pianeta in studio. Emerge forte il segnaledella legge 1/r2. Una interpretazione dinamica dovra tener conto di tale fondamentalefatto. Tutto cio sara accolto nella sintesi Newtoniana.
2.7 Newton
Va detto che l’esposizione del pensiero Newtoniano che si addotta ai nostri giorni e quella diEuler e Lagrange, ed e quella che qui sostanzialmente seguiremo: benche Newton conosces-se il livello piu elevato dell’analisi matematica del suo periodo, sembra in profondo rispettoed ammirazione del pensiero matematico ellenistico (ma sembra anche per una profondaavversione nei confronti del suo collega Robert Hooke al quale intendeva cripticamentecelare la sua opera), non la uso affatto, e nei suoi Philosophiae Naturalis Principia Mathe-matica (1687), tradusse i calcoli analitici in complessi ragionamenti puramente geometrici,si veda di V. I. Arnol’d, “Huygens e Barrow, Newton e Hooke”, Bollati Boringhieri.
Isaac Newton
57

In un sistema di riferimento associato ad uno spazio euclideo inerziale consideriamo ilsistema meccanico composto da due punti materiali S e P , Sole e Pianeta, di massa mS emP . Su tale sistema agisce un sistema di tipo interno di forze, le cui leggi-forza soddisfano alPrincipio di Azione e Reazione, in forma forte, cioe, sia rispetto alla Risultante sia rispettoal Momento. Quest’ultimo, come gia detto, e semplicente un requisito sulle leggi-forza.Posto h > 0 : costante gravitazionale di Cavendish,
FP =h mS mP
|PS|2vers PS, FS =
h mP mS
|SP |2vers SP,
FP + FS = 0, SP ∧ FP = 0.
I moti dinamicamente possibili sono tutti e soli dati dalle curve t 7→ (OP (t), OS(t))soddisfacenti al sistema dinamico definito dalla seguente equazione differenziale del se-condo ordine in R3 × R3 r ∆, dove ∆ := (x, y) ∈ R3 × R3 : x = y, che e lo spazio delleconfigurazioni di due particelle libere senza collisioni:
mP OP =h mS mP
|PS|2vers PS,
mSOS =h mP mS
|SP |2vers SP.
Tale sistema ammette sette integrali primi funzionalmente indipendenti (lo si verifichi): duevettoriali, quantita di moto e momento della quantita di moto, ed uno scalare, l’energia.
p(OP,OS, OP , OS) = mP OP +mSOS,
MO(OP,OS, OP , OS) = mPOP ∧ OP +mSOS ∧ OS,
E(OP,OS, OP , OS) = 12(mP |OP |2 +mS |OS|2)− h mS mP
|PS| .
Possiamo pensare il nostro sistema al primo ordine, nella forma x = X(x), ove ora ilcampo vettoriale X e definito nello spazio degli atti di moto (R3 × R3 − ∆) × R6, la cuichiusura e naturalmente R12. Un semplice bilancio sul numero (sette) degli integrali primiporterebbe a supporre che il sistema non sia integrabile, cioe non sembra sia possibileabbattere geometricamente la dimensione (dodici) del sistema al primo ordine. Ma lostato delle cose e meno pessimistico: la motivazione e profonda, risiede nella strutturaLagrangiana ed Hamiltoniana del sistema; un sintomo di tale fatto sara evidenziato nellateoria di Routh dove ogni integrale primo di ciclicita per un sistema Lagrangiano abbatteradi un grado di liberta il sistema, quindi con un guadagno di due unita nello spazio degliatti di moto. Ma la materia sara completamente chiarita nel teorema di Liouville-Arnol’d,che caratterizza i sistemi Hamiltoniani integrabili.
Per il momento procederemo senza utilizzare la struttura Lagrangiana del sistema.
58

Un primo passo consistera nell’uso geometrico dell’integrale vettoriale della quantitadi moto p: evidentemente esso sussiste perche il sistema di forze soddisfa al principio diazione e reazione rispetto alla risultante: FP + FS = 0.
Vale la pena generalizzare questo primo passo verso l’integrazione del sistema dinamicodi Newton pensando ad un piu generale sistema di interazione tra due corpi.
2.8 Massa Ridotta
In un sistema di riferimento inerziale I consideriamo un sistema meccanico di interazionetra due corpi P e S, della seguente generale struttura:
mP OP = FP (SP, OP − OS),
(I)
mSOS = FS(SP, OP − OS),
dove le leggi forza sono delle generali funzioni
FP , FS : R3 × R3 −→ R3,
dipendenti dal vettore differenza delle posizioni ed eventualmente dal vettore differenzadelle velocita (questa dipendenza ulteriore qui si e messa per generalita: naturalmente, ilcaso in studio dei due-corpi non la coinvolge). Inoltre valga:
FP (PS, OP − OS) + FS(PS, OP − OS) = 0.
Consideriamo ora un nuovo sistema non inerziale NI adatto alla descrizione relativa di Prispetto ad S. L’origine di tale nuovo sistema sara posto solidale ad S con assi coordinatiinvarianti rispetto a quelli del sistema inerziale I, in altri termini, il nuovo riferimento NItrasla e non ruota, ωtrascinamento = 0, rispetto ad I. Indichiamo in NI con
x := P − S = SP,
il vettore posizione del punto-pianeta P , conseguentemente
x = OP − OS.
Utilizziamo il teorema di Coriolis per i moti relativi e descrivente la relazione tra le acce-lerazioni,
aassoluta = arelativa + atrascinamento + aCoriolis,
59

pensiamo I: sistema assoluto e NI: sistema relativo, e notiamo che
arelativa = x, atrascinamento = OS, aCoriolis = 0.
Vale la pena ricordare che l’accelerazione di trascinamento e l’accelerazione, rispetto alsistema-spazio assoluto, di quel punto geometrico del sistema-spazio relativo per il qualesta transitando il punto materiale P : dato che il nostro sistema puramente trasla, l’ac-celerazione di trascinamento e uguale in ogni punto e vale appunto OS. Il nostro sistemameccanico sara ora cosı descritto in NI (naturalmente rispetto ad esso il moto di S ebanale)
mP x = FP (x, x)−mP OS.
Piu in dettaglio,
mP x = FP (x, x)−mP1
mSFS(x, x),
utilizzando ora FP + FS = 0,
mP x = (1 +mP
mS)FP (x, x),
posto
µ :=mPmS
mP +mS: massa ridotta di P,
l’equazione differenziale per P e infine data da
µx = FP (x, x). (NI)
Il motivo del nome ‘massa ridotta’ e chiaro:
µ =mPmS
mP +mS=
mPmPmS
+ 1< mP .
Noto dunque il moto t 7→ x(t) risolvente il sistema della massa ridotta in NI delsecondo ordine in R3 con dato iniziale x(0) = OP (0) − OS(0), x(0) = OP (0) − OS(0),come ricostruire la soluzione t 7→ (OP (t), OS(t)) in I?
La risposta risiede naturamente nell’uso dell’integrale vettoriale quantita di moto p.Infatti, assegnati i dati iniziali, il moto del baricentro G in I e subito determinato:
(mP +mS)OG = 0,
OG(t) = OG(0) + ˙OG(0)t =mPOP (0) +mSOS(0)
mP +mS+mP OP (0) +mSOS(0)
mP +mSt,
60

dunque e nota la seguente combinazione lineare di OP (t) e di OS(t):
OG(t) =mPOP (t) +mSOS(t)
mP +mS.
D’altra parte abbiamo determinato differenza di OP (t) con OS(t):
x(t) = OP (t)−OS(t).
La soluzione di tale sistema lineare offre il moto t 7→ (OP (t), OS(t)) in I.
2.9 Soluzione del Problema Ridotto ad un Corpo, il Proble-ma di Kepler
L’utilizzo dell’integrale primo vettoriale p, e della dipendenza di FP da OP e da OSmediante il vettore differenza, ha permesso la riduzione ad un sistema differenziale delsecondo ordine in R3 r 0,
µx = −hmPmS
|x|2vers x.
Associati a tale equazione differenziale valgono i seguenti integrali primi del momento dellaquantita di moto dell’energia (O ≡ S):
MO(x, x) = µx ∧ x,E0(x, x) = 1
2µ|x|2 − hmPmS
|x| .
In NI i moti dinamicamente possibili per tale sistema con forza centrale e dunque acce-lerazione centrale sono tutti piani e con velocita areolare costante. Considereremo il pianoπ su cui evolve il moto per una data assegnazione di Cauchy con un sistema di coordinatecartesiane con origine O ≡ S e asse di versore e3 = vers M0. Costruiremo quindi il sistemadi coordinate polari coerentemente a quanto sopra fatto.
Il primo passo sara quello della determinazione delle traiettorie geometriche dei moti instudio.
Utilizzando la formula di Binet per l’accelerazione, la componente radiale (la trasversae identicamente nulla) dell’equazione differenziale si scrive (r = |x|, er = vers x):
−µc2
r2
(d2 1r
dθ2+
1
r
)= −hmPmS
r2.
Per |MO| = µc 6= 0 si ha che r 6= 0, e dunque e sensata la semplificazione dei due termini1r2 : cio che resta e banalmente integrabile. Infatti
d2 1r
dθ2+
1
r=h(mP +mS)
c2(> 0)
61
e l’equazione differenziale lineare del secondo ordine in R, nell’incognita 1r (θ), di un oscil-
latore armonico di pulsazione ω = 1, non omogeneo e di funzione di disomogeneita da-ta dalla costante h(mP+mS)
c2. L’integrale generale dell’equazione completa e dato dalla
somma dell’integrale generale dell’omogenea con un integrale particolare della completa;quest’ultimo, cercandolo tra le funzioni di θ costanti e dato da 1
rp(θ) = h(mP+mS)
c2. Infine
1
r(θ, C1, C2) = C1 sin θ + C2 cos θ +
h(mP +mS)
c2.
Rileggiamo C1, C2 in termini di ampiezza e fase iniziale:
1
r(θ, C1, C2) =
√C2
1 + C22 (
C1√C2
1 + C22
sin θ +C2√
C21 + C2
2
cos θ) +h(mP +mS)
c2=
=√C2
1 + C22 (sin θ0 sin θ + cos θ0 cos θ) +
h(mP +mS)
c2,
1
r(θ,A, θ0) = A cos(θ − θ0) +
h(mP +mS)
c2,
ove abbiamo posto A =√C2
1 + C22 e θ0 = arcsin C1√
C21+C2
2
. Definiamo ora e e p tali che
h(mP +mS)
c2=
1
p, A =
e
p,
ne segue che le traiettorie geometriche sono tutte e sole delle sezioni coniche:
1
r(θ, e, p) =
e cos(θ − θ0) + 1
p.
Occupiamoci ora della determinazione della legge oraria. Possiamo indifferentementeusare l’integrale dell’energia o la conservazione della velocita areolare, che corrisponde allacostanza della parte scalare del momento della quantita di moto. Iniziamo con quest’ultimointegrale, indagheremo subito dopo le implicazione dell’integrale dell’energia.
Da c = r2θ segue ∫ t
0dt =
∫ θ(t)
θ0
r2(θ, e, p)
cdθ,
t =p2
c
∫ θ(t)
θ0
dθ
(1 + e cos(θ − θ0))2.
Quest’ultimo integrale si esprime in termini di funzioni elementari. La sua primitiva eabbastanza complessa —forse questo e uno dei motivi per cui raramente si legge nei manualidi Meccanica. Per l’ellisse introduciamo cosα = e < 1, una primitiva si scrive:
c
p2t =
a2c
b4t =
∫dθ
(1 + cosα cos θ)2=
62

= 2 arctancos α−θ2
cos α+θ2
1
sin3 α− cosα sin θ
1 + cosα cos θ
1
sin2 α.
Dovremmo infine invertirla per ottenere θ = θ(t). Nonostante tale difficolta, il problema diKepler e un prototipo di “sistema integrabile”, cioe di un sistema dinamico le cui soluzionisono determinabili mediante le due operazioni sopra descritte: calcolo di primitive (lecosiddette ‘quadrature’) e inversione di funzioni.
L’uso alternativo dell’integrale dell’energia non porta lontano nel problema dell’integra-zione, ma risulta geometricamente ben interpretabile. Da
E0 =1
2µ|v|2 − hmPmS
r=
1
2µ(r2 + r2θ2)− hmPmS
r,
E0 =1
2µr2 +
µc2
2r2− hmPmS
r.
Se interpretiamo la funzione
V effc (r) :=
µc2
2r2− hmPmS
r
quale energia ‘potenziale efficace’, vediamo che il nostro problema si interpreta come unproblema 1–dimensionale del tipo x = f(x). Tale interpretazione non e accidentale: giun-giamo canonicamente ad essa considerando la formulazione Lagrangiana del problema diKepler, dove L(r, θ, r, θ) con la ‘ciclicita’ ∂L∂θ = 0: il metodo di Routh fornisce la Lagrangia-
na ridotta Lc(r, r) di cui V effc (r) rappresenta il termine dell’energia potenziale (si consiglia,
per esercizio, di completare i dettagli tecnici).L’analisi dei livelli ad energia fissata E0 nel diagramma cartesiano x = r, y = Veff (r)
mette ben in evidenza le orbite chiuse (le ellissi) per E0 < 0, l’orbita circolare corrispon-
dente al minimo assoluto di V effc (r), e le orbite illimitate, le iperboli per E0 > 0, e la
parabola per E0 = 0.Dunque
t =
∫ r(t)
r0
dr√2E0µ −
c2
r2 + 2h(mP+mS)r
.
Utilizziamo nell’espressione dell’energia la formula di Binet per |v|2,
E0 =1
2µc2[(d1
r
dθ
)2+
1
r2
]− hmPmS
r,
e la formula delle coniche
E0 =1
2µc2(e2
p2sin2 θ +
1 + e2 cos2 θ + 2e cos θ
p2
)− hmPmS
1 + e cos θ
p,
63

ricordando che1
p=h(mP +mS)
c2=hmPmS
µc2,
abbiamo
E0 = µc2 e2 − 1
2p2,
e nel caso di orbite ellittiche otteniamo che l’informazione energetica e completamentecontenuta nel semiasse maggiore dell’orbita:
2E0
hmPmS=e2 − 1
p= −1
a, a : semiasse maggiore.
Vale la pena mettere in evidenza la portata della concordanza della legge di Newton conquelle di Kepler. Da un lato, la legge di Newton implica, nel sistema della massa ridottaNI, la completa validita delle due prime leggi di Kepler. Per quanto riguarda la terzalegge, abbiamo che
c = 2A = 2πab
T,
e c2 e pure cosı esprimibile
c2 = p h (mP +mS),
confrontiamo queste due espressioni per c, ricordando pure che p = b2
a ,
4π2a2b2
T 2= p h(mP +mS) =
b2
ah(mP +mS),
a3
T 2=h(mP +mS)
4π2,
dunque, la terza legge di Kepler e valida solo nell’approssimazione:
mP +mS ∼ mS .
2.10 L’equazione di Kepler
Abbiamo precedentemente messo in evidenza le difficolta nell’integrazione della legge orariadel problema dei due corpi. Si deve effettuare un’integrazione ed un’inversione. Taledifficolta e parzialmente rimossa ricorrendo alla seguente costruzione. Considereremo il casodelle orbite ellittiche, energia negativa. Consideriamo la circonferenza avente raggio pari alsemi-asse maggiore a e circoscritta all’ellisse in studio. Il centro di questa circonferenza el’origine di un sistema di coordinate cartesiane (O,X, Y ), mentre nel fuoco F c’e l’origine
64

del sistema cartesiano (F, x, y) con l’asse x coincidente con l’asse X. Accanto alle usualicoordinate polari r e θ, dove diremo
θ : anomalia vera,
consideriamo l’angolo u,u : anomalia eccentrica,
centrato in O, dal semi-asse positivo X al punto H sulla circonferenza, il quale si ottieneintercettando la circonferenza con la retta passante per il punto rappresentativo P e pa-rallela all’asse Y . L’area spazzata dal raggio vettore FP e una funzione lineare del tempo,A = c
2 t. In accordo con la tradizione, indicheremo con
ζ :=c
abt : anomalia media,
rapresentante, essenzialmente, la variabile temporale.
Dall’equazione dell’ellisseX2P
a2+Y 2P
b2= 1,
abbiamo chea2 cos2 u
a2+Y 2P
b2= 1,
e dunque:XP = XH = a cosu = r cos θ + ea, (rem : f = ea)YP = b sinu = r sin θ.
65

Ancora, dall’equazione dell’ellisse abbiamo (trascuriamo l’apice P )
Y =b
a
√a2 −X2.
Calcoliamo l’area dei settori FLH e FLP ,
area (FLH) = FK·KH2 +
∫ aXK
√a2 −X2 dX,
area (FLP ) = FK·KP2 + b
a
∫ aXK
√a2 −X2 dX.
OraKH = a sinu,KP = r sin θ = b sinu,
pertanto
KP =b
aKH.
Usando quest’ultima relazione le aree dei due settori risultano
area (FLP ) =b
aarea (FLH).
Ma queste due aree si calcolano anche in un altro modo:
area (FLH) = ua2
2 − fa sinu
2 = ua2
2 −ea2 sinu
2 ,area (FLP ) = c
2 t,
otteniamo cosı infine u− e sinu = cab t,
u− e sinu = ζ (equazione di Kepler)
La sola inversione di tale funzione fornisce la legge oraria dell’anomalia eccentrica,
u = u(ζ).
Per e < 1, il caso ellittico che stiamo trattando, l’equazione di Kepler, pensata come unafunzione ζ = ζ(u), induce un diffeomorfismo globale:
dζ
du= 1− e cosu > 0.
L’equazione di Kepler e da decenni un ambiente di prova per la teoria della rap-presentazione delle funzioni inverse mediante sviluppi in serie, si veda per esempio AurelWintner, The analytical foundations of celestial mechanics, 1941, ma anche letteraturapiu recente, Peter Colwell, Solving Kepler’s equation over three centuries, Willmann-Bell,1993.
66

2.11 Il Vettore di Runge-Lenz per il Problema di KeplerSpaziale
Riconsideriamo il problema di Kepler, dato dal sistema differenziale del secondo ordine inR3,
µx = − α
|x|2vers x (α := hmPmS).
Indichiamo conMO(x, x) := µ x ∧ x
il momento della quantita di moto, integrale primo vettoriale relativo a tale sistema. Di-mostriamo che la seguente funzione vettoriale, detta “vettore di Runge-Lenz” o “vettoredi Laplace”,
W(x, x) := x ∧MO(x, x)− α x
|x|e un integrale primo per il problema di Kepler. E un conto diretto (rem: d
dtMO = 0):
d
dtW = x ∧MO − α
x
|x|− α(− x
|x|2d
dt|x|),
ora, un rapido conto mostra che
d
dt|x| = d
dt
√x · x =
2x · x2√x · x
=x · x|x|
,
dunque:ddtW = −α
µx|x|3 ∧ (µx ∧ x)− α( x
|x| − xx·x|x|3 ),
= α(− x x·x|x|3 + x x·x|x|3 −
x|x| + x x·x|x|3
)= 0.
Tale vettore W, benche non sia indipendente da MO, ha nel caso ellittico un’interessanteinterpretazione geometrica: calcoliamo W nell’atto di moto che compete al transito perun punto apsidale dell’orbita, per esempio il perielio, ivi i vettori x∗, x∗ e MO sono traloro ortogonali, in particolare il vettore x∗ ∧ MO appare parallelo e orientato come ilvettore posizione x∗, dunque, dalla definizione di W, segue che quest’ultimo e diretto comeil vettore posizione x∗, indicante appunto la posizione nella spazio del punto apsidale,dunque la direzione in cui giace il semi-asse maggiore dell’orbita ellittica.
2.12 Circonferenza di Hamilton delle velocita nel Problemadi Kepler piano
Hamilton (1846) dimostro il seguente fatto (per maggior dettagli vedere p.e. l’articolo diJohn Milnor, On the Geometry of the Kepler Problem, American Math. Monthly, 90,(1983) 353-364):
67

Lungo ogni moto Kepleriano, x = −k x|x|3 , il vettore velocita descrive una circonferenza
nel piano dell’orbita.Nel piano in cui evolve l’orbita conica, nelle usuali coordinate polari, si ha
1
r=e cos θ + 1
p, c = r2θ, v = rer + rθeθ.
Derivando rispetto al tempo l’equazione delle coniche e usando l’integrale delle aree,
− 1
r2r = −esin θ
pθ, r = e
sin θ
pr2θ = e
sin θ
pc,
quindi
v = esin θ
pcer +
c
reθ =
= c(esin θ
per +
e cos θ + 1
peθ),
otteniamov =
c
peθ +
ce
p(sin θer + cos θeθ),
infinev(θ) =
ce
pc2 +
c
peθ(θ),
che e evidentemente l’equazione parametrica della circonferenza di centro (0, cep ) e di raggioρ = c
p .
2.13 Teorema di Bohlin (nella versione di Faure-Arnol’d):Equivalenza orbitale dei potenziali elastico e Kepleria-no
Pensiamo al piano R2 come al piano complesso C, z = x+iy. Sia U(z) un’energia potenzialeassegnata per una particella di massa m, dunque
L(z, z) =1
2m|z|2 − U(z).
Fissato il valore dell’energia totale e = 12m|z|
2 +U(z) =: E(z, z), le orbite, per quell’energiae, sono tutte e sole le orbite associate alla Lagrangiana
Le(z, z) =1
2m(e− U(z))|z|2
sulla ipersuperficie energetica che ora e descritta da Ee(z, z) := 12m(e − U(z))|z|2 = 1.
Queste due ipersuperfici sono distinte nello spazio degli atti di moto TR2 3 (z, z), ma le
68

superfici di livello delle rispettive funzioni Hamiltoniane (costruite con due ben distintetrasformazioni di Legendre), relative ai rispettivi valori e e 1, coincidono nello spazio dellefasi T ∗R2 3 (z, p) (vedere la teoria della metrica di Jacobi).
Teorema. Sia f : C→ C, z 7→ w = f(z) una funzione analitica con derivata complessaf ′ non nulla.
Supponiamo che
U(z) = |f ′(z)|2 = |dwdz
(z)|2.
Allora f muta Le(z, z) in
eLe′(w, w) :=1
2me(e′ − V (w)
)|w|2 = Le(z, z)
∣∣∣z=z(w), z= dz
dw(w)w
ove ee′ = −1, e V (w) = −| dzdw (w)|2 = −|df−1
dw (w)|2.
Osservazione. Si noti che f genera sia la trasformazione puntuale sia le rispettive energiepotenziali.
Prova. Dettagliamo
Le(z, z)∣∣∣z=z(w), z= dz
dw(w)w
=
=1
2m(e− |dw
dz(z)|2
)∣∣∣z=z(w)
| dzdw
(w)|2|w|2 =
=1
2m(e| dzdw
(w)|2 − 1)|w|2 =
=1
2me(− 1
e− (−| dz
dw(w)|2
)|w|2 =
= e1
2m(e′ − V (w))|w|2
.
Dunque non solo le orbite di Le(z, z) ma le sue leggi orarie (le soluzioni) coincidonocon quelle di Le′(w, w) (il fattore e e irrilevante): consideriamo quelle ad energia uguale ad1. Allora (teoria della metrica di Jacobi, principio di Maupertuis) esistono due rispettiveriparametrizzazioni del tempo che ci segnalano che le orbite (il loro supporto) di
L(z, z) =1
2m|z|2 − U(z), e =
1
2m|z|2 + U(z)
sono tutte e sole le orbite di
L(w, w) =1
2m|w|2 − V (w), e′ =
1
2m|w|2 + V (w).
69

Consideriamo un esempio: w(z) = z2. Allora
U(z) = 4|z|2 energia potenziale elastica,
V (w) = −| ddw
√w|2 = −1
4
1
|w|energia potenziale Kepleriana.
Quest’ultimo risultato, relativo all’equivalenza orbitale del caso elastico con quello Ke-pleriano e di K. Bohlin (1911); un’ulteriore versione di tale teorema di equivalenza fuintrodotta da Tullio Levi-Civita (1920). La versione generale del teorema qui cosı ripor-tato e di Arnol’d (vedi V.I. Arnol’d “Huygens & Barrow, Newton & Hooke”, Birkhauser,1990, purtroppo nella traduzione italiana Bollati-Boringhieri il teorema e sparito) il qualeavverte che la sua prima apparizione e stata in ambiente quantistico per opera di R. Faure(1953).
Va infine segnalato un notevole teorema di Bertrand (1873) che lega indissolubilmentepotenziale elastico e Kepleriano (vedi V. Arnol’d, Metodi matematici della meccanica clas-sica, Ed. Riuniti, p.42): In un campo centrale tutte le orbite limitate sono chiuse se e solose l’energia potenziale V (r) ha una delle seguenti forme:
V1(r) = α1r2, V2(r) = −α2
r, α1, α2 > 0.
2.14 Sulle soluzioni esatte del Problema a Tre Corpi ed N
Corpi
Siano m1,m2,m3 le masse di P1, P2, P3, mutuamente interagenti con gravitazione Newto-niana. L’equazione dinamica per il punto P1 e
m1OP 1 = hm1(m2P1P2
|P1P2|3+m3
P1P3
|P1P3|3),
e cosı analogamente per P2 e P3. Nelle Proposizioni 65 e 66 dei Principia Newton dette unrapido sguardo al problema dei tre corpi. Tuttavia in seguito disse che un’esatta soluzioneper i tre corpi
exceeds, if I am not mistaken, the force of any human mind.
Cio non scoraggio Joseph Louis Lagrange: nel 1772 dimostro che
(Soluzioni triangolari del problema a tre corpi, J. L. Lagrange) Comunquesiano scelte le masse m1,m2,m3 > 0, e comunque sia fissato l > 0, esiste una soluzionepiana, con P1, P2, P3 ai vertici di un triangolo equilatero di lato l e ruotante uniformementecon velocita angolare ±|ω| attorno al suo baricentro, dove
ω2 =h(m1 +m2 +m3)
l3.
70

La dimostrazione si fa per verifica diretta. Consideriamo un riferimento inerziale conorigine nel baricentro O, sicuramente questa e una scelta lecita perche il baricentro del siste-ma evolve con moto rettilineo uniforme. All’istante t = 0 poniamo i tre punti Pj , j = 1, 2, 3,nei vertici del triangolo equilatero di lato l e di baricentro O. Pensando, per comodita, all’o-meomorfismo R2 ∼ C, siano zj ∈ C (al tempo t = 0) i vettori posizione di Pj . Verifichiamoquindi che la rotazione del triangolo
OPj(t) = zj(t) = zjeiωt
e la soluzione esatta cercata. La derivata seconda risulta OP j = −ω2OP j , quindi l’equa-zione dinamica per P1 e soddisfatta se per ogni istante t
−m1ω2OP 1 = hm1(m2
P1P2
l3+m3
P1P3
l3),
mettendo a fattore 1/l3 e dalla definizione del baricentro O,
−m1ω2OP 1 =
hm1
l3(m1 +m2 +m3)P1O,
pertantoOP1(t) = z1e
iωt
se
ω2 =h(m1 +m2 +m3)
l3
Otteniamo cosı la tesi osservando che le stesse considerazioni, e per la stessa ω, valgonoper P2 e P3.
Lagrange reputo queste soluzioni fisicamente non interessanti, delle curiosita matema-tiche. Solo nel 1906 si scoprirono gli asteroidi Greci e nel 1908 i Troiani, che, grosso modo,evolvono nei due punti triangolari con il Sole e Giove —vedi, p.e., a pag. 409 del E. T.Whittaker, A Treatise on the Analytical Dynamics of Particles & Rigid Bodies. Lo studiodella stabilita di tali soluzioni e una lunga storia che inizia con Lagrange stesso: mentre lecondizioni per la stabilita del problema linerizzato si raggiungono abbastanza facilmente(e un conto noioso, ma diretto), informazioni sulla Lyapunov stabilita sono state ottenutesolo negli ultimi decenni mediante la teoria delle perturbazioni dei sistemi Hamiltoniani, esolo per il problema ristretto.
Alcuni tecnici dell’astronautica pensano di utilizzare i punti triangolari con Terra eLuna, che a conti fatti risultano stabili, per “parcheggiare” satelliti artificiali o astronavi;attualmente in tali punti sono stati osservati degli ammassi di polvere cosmica (K. Kor-dylewski, 1961) responsabili della luce zodiacale, “una diffusa luminescenza che si osservanel cielo durante notti limpide e serene e che si estende lungo le dodici costellazioni dellozodiaco”, vedi Alessandra Celletti e Ettore Perozzi, Meccanica Celeste, Cuen, 1996.
71

Altra classica famosa famiglia di soluzioni “rigide” del problema a tre corpi e datadalle soluzioni collineari di Euler, quest’ultime risultano tutte instabili, quindi difficilmenteosservabili.
Proviamo, per esercizio, a costruire qualche semplice famiglia di soluzioni per il pro-blema a N -corpi, con masse tutte uguali, e, naturalmente, con molta simmetria semplifi-catrice. Dimostriamo che
Esistono famiglie piane a simmetria assiale di soluzioni non rigide tali che ad ogni istantele particelle sono uniformemente distribuite su di una circonferenza di raggio dipendentedal tempo, ed inoltre ciascuna particella evolve di moto Kepleriano lungo una conica confuoco nel centro della circonferenza, uguale per tutte le particelle, ma ruotata, da particellaa particella, dell’angolo 2π
N .
Anche qui la prova e un conto diretto. Consideriamo una circonferenza di raggio r el’N -poligono regolare inscritto; la distanza di un prefissato vertice P dal vertice p-esimo,p = 1, ..., N − 1, e data da (geometria elementare) p = 1, ..., N − 1
lp := |PPp| = 2r sin(pπ
N).
Scriviamo l’equazione vettoriale di Newton per la particella P ,
mOP = hm(mPP1
|PP1|3+ ...+m
PPp|PPp|3
+ ...+mPPN−1
|PPN−1|3),
usiamo per il primo membro la formula di Binet (e lecito, perche la risultante delle forze suP e centrale con polo il centro O della circonferenza) e riorganizziamo il secondo membro,
−mc2
r2
(d2 1r
dθ2+
1
r
) OP|OP |
=
= hm2(1
l21sin(PP1P1) + ...+
1
l2psin(PPpPp) + ...+
1
l2N/2sin( PPN/2PN/2))
PO
|PO|,
ove Pp e la proiezione ortogonale di Pp sull’asse per OP . (Conviene schizzare una figura.)Si osservi che (anche qui, geometria elementare)
sin(PPpPp) = sin(pπ
N).
(Si verifichi la formula, per es., nel caso N pari, per p = N/2 essa da: sin( PPN/2PN/2) = 1,come ci si deve aspettare.)
−mc2
r2(d2 1
r
dθ2+
1
r)OP
|OP |= hm2 1
r2k(N)
PO
|PO|,
72

dove, supponendo per es. il caso N pari,
k(N) =
N2−1∑
p=1
1
2 sin(p πN )+
1
4.
Infine, per la particella P ,d2 1
r
dθ2+
1
r=hmk(N)
c2,
le cui soluzioni sono le note coniche come nel classico problema dei due corpi. Fissata lacostante delle aree c, uguale per tutte le particelle, otteniamo rapidamente la tesi. Tuttofunziona ancora, con ovvie modifiche, se poniamo al centro O una particella di massaarbitraria M .
Nel caso ellittico otteniamo delle soluzioni di “anello pulsante” (tra ipogeo e apogeo) sucui si equidistribuiscono le particelle, le quali, tra l’altro, compiono un moto di rotazioneattorno ad O.
Quando la conica e una circonferenza tale soluzione esatta potrebbe essere pensatacome un modello esatto per la “fascia degli asteroidi”, in effetti, essa fu invece propostadal giovane Clerk Maxwell nel 1856 come modello per l’anello di Saturno: gli valse unpremio all’universita di Cambridge. Queste particolari soluzione esatte del problema adN corpi sono ben catalogate nel fondamentale manuale di Aurel Wintner, The analyticalfoundations of celestial mechanics, 1941, e per Maxwell si veda la citazione a p. 306.
Il problema generale dei tre corpi e attualmente oggetto di ricerca avanzata. Si e lontanida una comprensione esauriente. E il punto obbligato d’inizio della studio resta comunquel’opera poderosa di Henri Poincare: i tre volumi de Les Methodes Nouvelles de la MecaniqueCeleste, 1892.
73
74
Capitolo 3
Teoria della Stabilita
3.1 Lyapunov Stabilita
Consideriamo l’equazione differenziale associata ad un campo vettoriale (non lineare) X :Rm → Rm,
x = X(x),
e sia x = x∗ un equilibrio, cioe una configurazione in cui il campo X si annulla, X(x∗) = 0,e dunque il problema di Cauchy con dato iniziale al tempo t = 0 nell’equilibrio, x(0) = x∗,e risolto (almeno) dalla curva banale x(t) = x∗. Il concetto di stabilita di un equilibriox∗ di un’equazione differenziale di prim’ordine —che ora enunceremo qui di seguito— epuramente topologico.
Definizione (Lyapunov stabilita): un punto x∗ e di equilibrio stabile se ∀ε > 0 ∃δ =δ(ε) > 0 e δ ≤ ε, tale che, ∀ dato iniziale x0 ∈ B(x∗, δ), la soluzione x(t, x0) del problema:
x = X(x), x(0) = x0,
non esce mai dalla palla B(x∗, ε), cioe x(t, x0) ∈ B(x∗, ε), ∀t ≥ 0.
75

X?
X0 δ
ε
Diremo instabile una configurazione d’equilibrio che non e stabile (e abolito l’equilibrioindifferente).
Lo spazio di evoluzione del sistema dinamico retto dall’equazione differenziale x = X(x)e Rm, e la definizione ora data usa la base di intorni aperti formata dalle palle generatecon la norma (e dunque con la metrica) euclidea: B(x∗, r) := x ∈ Rm : |x − x∗| < r.Nel caso dimensionalmente finito, in cui stiamo lavorando, e noto che tutte le norme sonotopologicamente equivalenti, e questo giustifica l’affermazione iniziale.
Se il sistema dinamico e di tipo meccanico —per esempio, equazioni di Lagrange postein forma normale—, q = f(q, q), q ∈ RN , allora lo spazio in cui il sistema evolve al primoordine e lo spazio degli atti di moto, Rm = R2N , x = (q, v) ∈ R2N ,
x =
(q
v
)=
(v
f(q, v)
)= X(x),
X : R2N → R2N ,
(q
v
)→(
v
f(q, v)
).
L’equilibrio di un sistema dinamico di tipo meccanico e ancora dato da un punto x∗ =(q∗, v∗) che annulla il campo vettoriale X:
X(x∗) = 0 se e solo se
(v∗
f(q∗, v∗)
)=
(0
0
);
76

ritroviamo quindi la ben nota definizione meccanica di equilibrio, letta ora nello spaziodegli atti di moto:
q∗ e un punto d’ equilibrio per q = f(q, q) se e solo se l’atto di moto x∗ = (q∗, 0) e taleper cui f(q∗, 0).
Nel 1892 Lyapunov enuncio il seguente teorema, di carattere topologico, che offre dellecondizioni sufficienti per la stabilita di un equilibrio x∗ per una generica equazione x =X(x).
Teorema 1 (T. topologico sulla stabilita semplice). Sia x∗ un punto di equilibrio peril sistema dinamico, X(x∗) = 0. Supponiamo che esista una funzione continua
W : U ⊆ Rm → R, x∗ ∈oU,
tale che
1) W (x∗) = 0, W (x) > 0 ∀x ∈ U \ x∗, cioe W e definita positiva in x∗, localmente
inoU ;
2) per ogni soluzione t 7→ x(t) e per ogni t per cui x(t) ∈ U , la funzione composta
t 7→W (x(t))
sia monotona non crescente:
t1 < t2 ⇒W (x(t1)) ≥W (x(t2)).
Allora x∗ e un equilibrio stabile.
Prova: dobbiamo verificare la definizione di stabilita. Fissiamo dunque ε > 0 ad arbitrio.Non e certamente restrittivo prenderlo tale che B(x∗, ε) ⊂ U.W e una funzione continua e quindi e continua anche la sua restrizione sulla buccia dellapalla B(x∗, ε), che e compatta. Per il teorema di Weierstrass, esiste
a := min|x−x∗|=εW (x),
inoltre, per la condizione 1), a > 0.
Scriviamo ora in dettaglio la condizione di continuita di W in x∗, utilizzando come “epsilon”il numero positivo a appena definito. Dunque, in corrispondenza di a esiste un δ > 0 taleche, ∀x0 ∈ B(x∗, δ), vale : |W (x0)−W (x∗)| < a, cioe
W (x0) < a ∀x0 ∈ B(x∗, δ).
Si osserva ora che la soluzione x(t, x0), con dato iniziale x(0) = x0, ove
x0 ∈ B(x∗, δ), rimane definitivamente in B(x∗, ε); infatti, usando la condizione 2), ∀t > 0si ha
W (x(t, x0)) ≤W (x0) < a;
77

dunque x(t, x0) non raggiunge la buccia di B(x∗, ε) per alcun t > 0, perche in tal caso—essendo a := min|x−x∗|=εW (x)— si avrebbe che
W (x(t, x0)) ≥ a,
in contrasto con quanto appena mostrato, W (x(t, x0)) < a.
Lo studio della stabilita degli equilibri mediante le funzioni W , dette (appunto) “fun-zioni di Lyapunov”, e universalmente noto come Secondo Metodo di Lyapunov.
L’ambiente puramente topologico in cui abbiamo finora operato, che e quello naturalein cui si pone il problema della stabilita, risulta pero scarsamente utile dal punto di vistapratico: infatti per verificare la condizione 2) di non crescenza delle candidate funzionidi Lyapunov W lungo le soluzioni dell’equazione differenziale, dovremmo conoscere tuttele soluzioni di tale equazione, ma a quel punto sarebbe inutile procedere col teorema diLyapunov, dato che la presunta conoscenza di tutte le soluzioni t 7→ x(t) con immaginein U basterebbe ampiamente per analizzare l’andamento qualitativo dinamico locale inx∗. E ben noto, invece, che non e possibile conoscere, esibire le soluzioni delle equazionidifferenziali ordinarie. Tale difficolta e ben piu seria della difficolta del calcolo di primitivedi integrali o dell’inversione di funzioni.
Il pessimismo che emerge rimanendo nella categoria topologica e in parte rimovibilenella categoria differenziale; richiederemo, cioe, che W sia differenziabile, e, invece dellacondizione 2), richiederemo:
2)′ (gradRmW (x)) ·X(x) ≤ 0, x ∈ U,
ove · rappresenta il prodotto scalare in Rm.Chiaramente, se vale 2)′, allora per ogni t 7→ x(t), soluzione con supporto in U ,
d
dt[W (x(t))] = (gradRmW ((x))|x=x(t) ·
dx
dt(t) =
= (gradRmW (x))|x=x(t) ·X(x(t)) ≤ 0,
e dunque vale la condizione 2) nei sottoinsiemi connessi. Il primo membro della condizione2)′, condizione che si verifica naturalmente senza risolvere l’equazione differenziale, e dettoderivata di Lie di W lungo il campo vettoriale X:
(LXW )(x) := gradRmW (x) ·X(x).
Riassumendo:
Teorema 2 (T. differenziale sulla stabilita semplice). Sia x∗ un punto di equilibrio peril sistema dinamico, X(x∗) = 0. Supponiamo che esista una funzione differenziabile:
W : U ⊆ Rm → R, x∗ ∈oU,
78

tale che
1) W (x∗) = 0, W (x) > 0 ∀x ∈ U \ x∗, cioe W e definita positiva in x∗, localmente
inoU ;
2)′ (LXW )(x) ≤ 0, ∀x ∈ U .Allora x∗ e un equilibrio stabile.
Esercizio. A volte, nei vecchi manuali classici di Meccanica Razionale, si trova laseguente definizione di stabilita di un equilibrio q∗ per q = f(q, q):sia f(q∗, 0) = 0; si dice
che q∗ e stabile se, ∀ε > 0, si determina δ > 0 tale che ∀q0 ∈ B(q∗, δ) e ∀q0 per cui
T (q0) := 12 | q0 |2 < δ, si ha che la soluzione
q(t, q0, q0
)∈ B(q∗, ε) e T
(dq
dt
(t, q0, q0
))< ε, ∀t ≥ 0.
Dimostrare che tale definizione e equivalente a quella precedentemente data, dimostrandoche gli insiemi
(q, q) : q ∈ B(q∗, ε), T (q) < ε
formano, per ε > 0, una base di intorni di (q∗, 0). (Si provi ad estendere queste argomen-tazioni al caso di energia cinetica dipendente da q.)
3.2 Stabilita Asintotica
Definizione. Sia x∗ un punto d’equilibrio per x = X(x): X(x∗) = 0. Diremo che x∗ easintoticamente stabile se ∀ε > 0 ∃δ > 0 tale che ∀x0 ∈ B(x∗, δ) si ha :
i) ∀t > 0 : x(t, x0) ∈ B(x∗, ε), cioe x∗ e d’equilibrio stabile,
ed inoltre
ii) limt→+∞
x(t, x0) = x∗.
Vale il seguente teorema di Lyapunov.
Teorema 3 (T. sulla stabilita asintotica). Sia x∗ un punto d’equilibrio per il sistemadinamico associato al campo vettoriale continuo X ∈ C0(Rm;Rm). Supponiamo che esistauna funzione W di classe C1(U ;R) (differenziabile con continuita):
W : U ⊆ Rm → R, x∗ ∈oU,
tale che:
1) W (x∗) = 0, W (x) > 0 ∀x ∈ U \ x∗, cioe W e definita positiva in x∗, localmentein U ,
2)′′ LXW (x∗) = 0, LXW (x) < 0 ∀x ∈ U \ x∗, cioe LXW e definita negativa in x∗,localmente in U .
Allora x∗ e un equilibrio asintoticamente stabile.
79

Prova: la condizione 2)′′ implica la condizione 2)′ del teorema 2, dunque: ∀ε > 0 ∃δ > 0
tale che ∀x0 ∈ B(x∗, δ): x(t, x0) ∈ B(x∗, ε) ∀t ≥ 0,
cioe la stabilita di x∗ e subito accertata.
Fissiamo ora l’attenzione, per un ε > 0 scelto e un conseguente δ, su un ben determinatodato iniziale x0 ∈ B(x∗, δ); indagaremo sull’andamento asintotico della soluzione x(t, x0).La convergenza lim
t→+∞x(t, x0) = x∗ sara provata verificando che, comunque si scelga ε1 > 0
esiste un istante t tale che, per ogni t > t, la soluzione x(t, x0) resta definitivamenteconfinata in B(x∗, ε1).
In effetti la stabilita implica che, in corrispondenza di ε1 > 0, esiste δ1 > 0 tale che se aqualche istante t
x(t, x0) ∈ B(x∗, δ1) allora x(t, x0) ∈ B(x∗, ε1) ∀t ≥ t.
Se, per assurdo, fosse sempre |x(t, x0)− x∗| ≥ δ1 ∀t ≥ 0, poiche nel chiuso
B(x∗, ε) \B(x∗, δ1)
LXW e continua ed ha un massimo negativo −µ, allora ∀t ≥ 0 avremmo
d
dtW (x(t, x0)) = LXW (x(t, x0)) ≤ −µ < 0
e quindi, integrando tra t = 0 e t > 0,
W (x(t, x0)) ≤W (x0)− µt.
Ma, al crescere di t, W (x(t, x0)) diventerebbe negativa in alcuni punti di U , contro l’ipo-tesi 1). Quindi deve esistere un istante t in cui x(t, x0) ∈ B(x∗, δ1), e quindi x(t, x0) ∈B(x∗, ε1) ∀t ≥ t.
80

x?
x0
δ1ε1
δ
ε
3.3 Teorema di Lagrange-Dirichlet
Nel caso di sistemi dinamici meccanici a vincoli olonomi bilaterali, fissi, lisci vale il se-guente teorema di Lagrange-Dirichlet, che qui deduciamo come applicazione del teorema(il secondo, nell’esposizione fatta) di Lyapunov.
Teorema (Lagrange-Dirichlet). Si consideri un sistema a vincoli olonomi bilaterali,lisci, fissi. Supponiamo che sia soggetto alle sollecitazioni
Qh(q, q) = Q(1)h (q) +Q
(2)h (q, q),
ove
i) Q(1)h (q) = − ∂U
∂qh(q) (conservative)
ii) Q(2)h (q, q) : Q
(2)h (q∗, 0) = 0,
N∑h=1
Q(2)h (q, q)qh ≤ 0.
Supponiamo che in q∗,∂U∂qh
(q∗) = 0, cioe q∗ sia d’equilibrio. Se q∗ e un minimo stretto
locale per U , l’energia potenziale di Q(1)h (q), allora q∗ e stabile.
81

Prova: mostriamo che la funzione
E(q, q) = T (q, q) + U(q)− U(q∗)
e una funzione di Lyapunov in (q∗, 0) per la dinamica associata al nostro sistema. Sappiamoche q 6= 0⇒ T (q, q) > 0, inoltre q∗ e un minimo stretto locale, dunque esiste un intorno di(q∗, 0) in R2N in cui E(q, q) e definita positiva.Lungo le soluzioni:
dE
dt=dT
dt+dUdt,
per il teorema delle “forze vive”,dT
dte la potenza di tutte le forze applicate, attive e
vincolari, quest’ultime, essendo liscio il sistema, fanno lavoro nullo. Dunque:
dE
dt= Q
(1)h qh +Q
(2)h qh −Q
(1)h qh = Q
(2)h (q, q)qh ≤ 0,
pertanto E(q, q) e una funzione di Lyapunov.
Forze o sollecitazioni del tipo Q(2)h (q, q) si dicono:
giroscopiche se Q(2)h (q, q)qh = 0,
dissipative se Q(2)h (q, q)qh < 0 per q 6= 0.
Esempi, per q ∈ R3:1) la forza di Coriolis, −mac = −2m ω∧q, di tipo giroscopico;2) la forza viscosa, F v = −kq,di tipo dissipativo.
Esercizio 1: mostrare che in presenza di forze dissipative le funzioni di Lyapunov cosı ot-tenute non mostrano la stabilita asintotica, bensı la sola stabilita semplice. Questo nonsignifica che l’equilibrio in studio non possa essere asintoticamente stabile, come giusta-mente si potrebbe sospettare, ma questo lo si puo rilevare o con una funzione di Lyapunovad hoc (vedi l’esercizio 2), o col Primo Metodo di Lyapunov (vedi piu avanti), o con un op-portuno teorema (vedi, per esempio, la Sect. 35 del F. Gantmacher “Lectures in AnalyticalMechanics”, Mir 1975).Esercizio 2: si consideri l’oscillatore armonico con viscosita:
mq = −hq − kq,
mostrare che la funzione
W (q, q) =1
2m|q|2 +
h
2|q|2 +
1
2(m|q +
k
mq|2 + h|q|2)
82
e una funzione di Lyapunov per l’asintotica stabilita di (q, q) = (0, 0). Si provi ad estenderetale costruzione di funzione di Lyapunov per sistemi piu generali.Esercizio 3: sembrerebbe ragionevole che un equilibrio di un sistema meccanico conservativoin cui l’energia potenziale non e un minimo sia instabile. L’inversione del teorema diLagrange-Dirichlet (che offre solo condizioni sufficienti per la stabilita) non e pero materiacompletamente chiarita; mostrare che per l’energia potenziale C∞ ma non analitica (q ∈R1),
U(q) = cos(1
q) e− 1q2 , q 6= 0, U(0) = 0,
q = 0 e stabile benche il punto stazionario q = 0 non sia un minimo (questo e noto come“esempio di Painleve-Wintner”). Il teorema enunciato piu sotto (e non dimostrato) e unesempio di parziale inversione del teorema di Lagrange-Dirichlet.Esercizio 4: per i sistemi meccanici conservativi a vincoli lisci e fissi ha senso aspettarsil’asintotica stabilita?Esercizio 5: mostrare che per i generali sistemi dinamici x = X(x) la stabilita di unequilibrio x∗ implica l’unicita della soluzione quiete x(t) = x∗ per il problema di Cauchycon dato iniziale x0 = x∗, senza nulla richiedere sulla regolarita di X.Esercizio 6: ad una prima lettura della definizione di asintotica stabilita la condizione i)sembrerebbe rindondante, cioe implicata dalla ii): perche tale argomento e falso? Nelle
applicazioni e utile il seguente teorema, che non dimostreremo:Teorema (THND) Sia dato un sistema olonomo, bilaterale, liscio. Le sollecitazioni sianotutte conservative, vale a dire:
Qh(q) = − ∂U∂qh
(q).
Sia q∗ un punto stazionario per U :∂U∂qh
(q∗) = 0. Sia la matrice hessiana non degenere:
det∂2U∂qh∂qk
(q∗) 6= 0.
Allora l’equilibrio q∗ e stabile se e solo se la forma quadratica
∂2U∂qh∂qk
(q∗)λhλk > 0, ∀λ 6= (0, . . . , 0)
cioe, e definita positiva.
Mettiamo in evidenza con esempi concreti il carattere essenziale dell’ipotesi di sole forzeconservative.Esempio 1: si consideri una particella di massa m vincolata senza attrito su di un pianoorizzontale rotante (O, x, y) con velocita angolare di trascinamento rispetto agli spazi iner-ziali ω, un vettore costante diretto lungo l’asse z. La particella sia soggetta ad una forza
83

elastica di centro O. Gravita e reazione vincolare fanno lavoro nullo e un semplice contomostra che O e d’equilibrio nel sistema rotante e l’energia potenziale della forza elastica edi quella centrifuga vale
U(x, y) =1
2(h−mω2)(x2 + y2).
Sulla particella agisce la forza di Coriolis F = −2mω ∧ v, v = (x, y), che ha un ovviocarattere giroscopico, F · v = 0. Lagrange-Dirichlet ci dice (condizione solo sufficiente)che c’e stabilita se h −mω2 > 0. E un’applicazione frettolosa del teorema di cui sopra ciporterebbe a concludere che c’e stabilita se e solo se h−mω2 > 0. Ma questa conclusionee troppo pessimistica: l’analisi diretta delle soluzioni (non e difficile determinarle, e unsemplice sistema lineare) mostra che in effetti la stabilita sussiste per ogni valore dellacostante elastica h > 0.
3.4 Stabilizzazione Giroscopica
(Un particolare caso lineare della stabilizzazione giroscopica) Una particella di massa m evincolata senza attrito su di un piano (O, x, y), solidale ad un sistema inerziale. E’ soggettaad una forza conservativa di energia potenziale quadratica
U(x, y) =1
2(ax2 + by2).
Se almeno uno dei due coefficienti e nullo, e facile vedere che l’origine e instabile (farlo).Dal precedente teorema l’origine e stabile se e solo se a > 0 e b > 0. Supponiamo dunqueuna situazione di instabilita, e per semplicita porremo a = b = −µ < 0. La particella hacarica elettrica e; ci si chiede se sia possibile introdurre un campo magnetico costante H eortogonale al piano (O, x, y) tale da stabilizzare, mediante la conseguente forza di Lorentz,l’equilibrio (x,y)=(0,0). Le equazioni dinamiche sono
mx = µx+e
cHy,
my = µy − e
cHx.
L’omeomorfismo R2 ∼ C —si moltiplica la seconda per i =√−1 e si somma membro a
membro— ci da (ζ = x+ iy)
mζ = µζ − ieHcζ.
Con le soluzioni test della forma ζ(t) = eλt costruiamo l’equazione caratteristica
mλ2 + ieH
cλ− µ = 0
84

le cui radici sono
λ1,2 =−i eHc ±
√−( eHc )2 + 4mµ
2m.
Se il campo magnetico e sufficientemente intenso, cioe se
−ω2 := −(eH
c)2 + 4mµ < 0,
allora l’integrale generale e dato dalle combinazioni complesse
ζ(t, c1, c2) = c1eλ1t + c2e
λ2t = e−ieH2mc
t(c1eiω2m
t + c2e− iω
2mt).
Esiste una abbastanza ovvia (determinarla) relazione lineare non singolare tra i dati iniziali(x, y, x, y) ∈ R4 e le coppie (c1, c2) ∈ C2. Si tratta infine di verificare che per ogni ε > 0esiste un δ > 0 tale che comunque si scelga
|(c1, c2)|C2 < δ
accade che|(ζ(t, c1, c2), ζ(t, c1, c2))|C2 < ε
per ogni t > 0. (E’ un conto facile: le curve t 7→ (ζ(t, c1, c2), ζ(t, c1, c2)) sono uniformementelimitate da una costante che va a zero con |(c1, c2)|C2).
Sfortunatamente tale stabilizzazione e molto fragile. Basta la presenza di una piccolaforza di resistenza di mezza di tipo viscoso come F = −ν(x, y) con un arbitrariamentepiccolo ν > 0 perche la stabilita sia distrutta. Le nuove equazioni dinamiche nel campocomplesso ora diventano
mζ + (ν + ieH
c)ζ − µζ = 0.
Se ora studiamo le radici dell’equazione caratteristica, notiamo che il loro prodotto e
λ1λ2 = − µm,
quindi
Re(λ1λ2) = − µm, Im(λ1λ2) = 0,
da quest’ultima:
Reλ1
Reλ2= −Imλ1
Imλ2.
Ma, per piccoli valori ν > 0, mediante argomento di continuita, abbiamo che
sgnImλ1
Imλ2
∣∣∣ν>0
= sgnImλ1
Imλ2
∣∣∣ν=0
= +1,
85
cosiccheReλ1
Reλ2< 0,
e dunque c’e ora una radice con parte reale positiva: e l’instabilita. Si noti, un meccanismoquesto, in un certo senso contro l’intuizione, qualitativamente opposto a quanto accadenel caso di sistema dinamico con equilibrio stabile la cui stabilita e deducibile mediantefunzione di Lyapunov di tipo energia totale e al quale aggiungiamo viscosita.
Esiste un modo piu semplice e geometrico per rendersi conto della distruzione dellastabilita giroscopica da parte della viscosita. Si consideri in R3 il grafico (concavo) dellafunzione energia potenziale. Nonostante la presenza della forza giroscopica, l’integrale diJacobi, dato dall’energia cinetica piu l’en. potenziale, si conserva. Si fissi, con un pianoortogonale all’asse z ed intersecante il grafico, il valore dell’integrale di Jacobi. La positivitadell’energia cinetica ci avverte che la regione consentita alla particella, letta su tale piano,e quella esterna all’intersezione col grafico dell’en. pot. Aggiungiamo ora la viscosita: ilpiano scende, verso valori di z via via minori, la regione consentita viene via via spintaall’infinito: e l’instabilita.
86

3.5 Equazioni Differenziali Lineari (richiamo)
L’equazione differenziale lineare in Rm:
x = Ax, x(0) = x0,
si risolve formalmente mediante l’esponenziale di matrice:
x(t, x0) = eAtx0,
ove
eA :=+∞∑k=0
Ak
k!.
Indaghiamo sulla struttura piu generale di tale risolvente. In questa analisi e cruciale ilseguente
Teorema (Jordan). Per ogni matrice A ∈ L(m,K), ove K = R oppure C, esisteP ∈ GL(m,C), cioe una matrice a detP 6= 0 ed ad elementi complessi, tale che, medianteP , A sia simile alla somma di due matrici D, N ∈ L(m,C): P−1AP = D +N delle qualisi sa che:
D e diagonale : A =
λ1 0. . .
0 λm
,
N e ν − nilpotente : Nν+1 = O,
D commuta con N : DN = ND.
Si verifica facilmente che lo spettro di A, Spect(A), e lo spettro di P−1AP , che e anche lo
spettro di D, cioe gli elementi diagonali di D. Dunque:
eAt = P eP−1AtPP−1 = P eDt+NtP−1 = P eDteNtP−1 =
= P
. . . 0
eλit
0. . .
ν∑k=0
(Nt)k
k!P−1,
ove si sono utilizzati i risultati contenuti in: De Marco, Analisi Due/Uno, pp.150-153, e sie tenuto conto che l’esponenziale di una matrice diagonale e diagonale e
λ1, . . . , λi, . . . , λm = Spect(A) ⊂ C
La sup-norma di eAt (la solita, sulla palla dei vettori unitari), per t ≥ 0, si puo stimarefacilmente, usando la struttura di algebra di Banach,
‖eAt‖ ≤ Cemaxi=1,...,m<e(λi)t (1 + tν).
87
Osservazione. Se <e(SpectA) < 0, e immediato vedere che x = 0 e un equilibrio asinto-ticamente stabile per x = Ax. Sia infatti α = maxi=1,...,m<e(λi) < 0 e sia, pert ≥ 0, a = Ce−|α|t
∗(1 + t∗ν) il massimo della funzione C e−|α|t(1 + tν). Fissato un ε > 0
arbitrariamente, sia δ = ε/a. Per ogni x0 ∈ B(0, δ):
|x(t, x0)| = |eAtx0| ≤ ‖eAt‖ |x0| ≤
≤ C e−|α|t(1 + tν)|x0| ≤
≤ a|x0| < ε;
inoltre: limt→+∞
x(t, x0) = 0.
3.6 Linearizzazione attorno ad Equilibri Stabili
Consideriamo ora il campo vettoriale non lineare X ∈ C2(Rm;Rm) e l’equazione differen-ziale associata
x = X(x)
abbia in x = 0 un equilibrio (X(0) = 0) stabile.Sia X(x) = X ′(0)x + R(x), ove |R(x)| ≤ k|x|2, lo sviluppo di Taylor di X, arrestato alprimo ordine.Fissato arbitrariamente ε > 0, troviamo δ > 0 tale che, ∀x0 ∈ B(0, δ) si abbia: x(t, x0) ∈B(0, ε); inoltre, lungo tali soluzioni, il resto R(x(t, x0)) ha il seguente comportamento:
|R(x(t, x0))| ≤ k |x(t, x0)|2 < k ε2,
cioe le soluzioni ε-dominate nel senso della stabilita rendono il resto del campo vetto-riale, R(x(t, x0)), dell’ordine di ε2. Questo induce a pensare che lo studio del problemalinearizzato
y = X ′(0)y, y(0) = x0,
a parita di dato iniziale, sia una buona approssimazione del problema, non lineare
x = X(x), x(0) = x0.
Mentre la soluzione del problema linearizzato e
y(t, x0) = eX′(0)tx0,
la soluzione del problema originale non lineare si puo implicitamente rappresentare nelseguente modo:
x(t, x0) = eX′(0)tx0 +
∫ t
0eX′(0)(t−s)R(x(s, x0))ds.
88

Accettiamo, senza dimostrarlo, il seguente teorema (da un punto di vista intuitivo e moltoragionevole):
“ Se x = 0 e d’equilibrio stabile per x = X(x) allora <eSpect(X ′(0)) ≤ 0 ”.
(Piu avanti stabiliremo che se <eSpect(X ′(0)) < 0 allora x = 0 e asintoticamente stabile.)
In intervalli compatti di tempo [0, T ] stimiamo il divario tra le due soluzioni.
supt∈[0,T ]
∣∣x(t, x0)− y(t, x0)∣∣ = supt∈[0,T ]
∣∣x(t, x0)− eX′(0)tx0
∣∣ =
= supt∈[0,T ]
∣∣∣∣∫ t
0eX′(0)(t−s)R(x(s, x0))ds
∣∣∣∣ ≤≤ supt∈[0,T ] t sups∈[0,t]
∥∥eX′(0)(t−s)∥∥ ∣∣R(x(s, x0))
∣∣ ≤≤ supt∈[0,T ] t sups∈[0,t] C emaxi<e(λi)(t−s)
(1 + (t− s)ν
)k ε2,
dato che maxi<e(λi) ≤ 0 , il sups∈[0,t]emaxi<e(λi)(t−s) e realizzato per s = t,mentre il
sups∈[0,t]
(1 + (t− s)ν
)k ε2 e realizzato per s = 0.
Infine:
supt∈[0,T ]|x(t, x0)− y(t, x0)| ≤ T C (1 + T ν) k ε2.
Nel caso delle Piccole Oscillazioni dei Sistemi Lagrangiani, X ′(0) e diagonalizzabile, cioe
N = O (quali sono le ragioni per cui cio accade?), e quindi la stima diventa:
supt∈[0,T ]|x(t, x0)− y(t, x0)| ≤ C k T ε2.
Come usare questa stima? Dire che in intervalli di tempo dell’ordine di T = 1/ε il divarioe dell’ordine di ε, come si verifica facilmente, e completamente inutile: x = 0 e d’equilibriostabile sia per il sistema linearizzato, sia per il sistema non lineare e gia sappiamo che,se prendiamo x0 in una δ-palla opportunamente piccola, sia x(t, x0) sia y(t, x0) sono ε-dominate e per sempre (∀t ≥ 0). La stima di cui sopra ci dice invece che, per esempio, per
intervalli dell’ordine di T = 1/√ε (< 1/ε), il divario e dell’ordine di ε
32 :
supt∈[0,1/√ε]|x(t, x0)− y(t, x0)| ≤ C k ε
32 ,
che (per piccoli ε 1) risulta ben piu piccolo di ε.
3.7 Primo Metodo di Lyapunov
A differenza del Secondo, il Primo Metodo di Lyapunov e costruttivo, da delle informazionisulla stabilita di un equilibrio dalla conoscenza della parte lineare del campo vettoriale, piuprecisamente, dall’osservazione del suo spettro. Dimostriamo il seguente
89

Teorema. Sia X(0) = 0. Se <e(Spect(X ′(0))
)< 0 allora x = 0 e un equilibrio
asintoticamente stabile per x = X(x).
Osservazione 1. Questo teorema non esaurisce il primo metodo, si potrebbe dimostrare chese qualche autovalore ha parte reale strettamente positiva allora l’equilibrio e instabile.Osservazione 2. Si puo dimostrare che dalla condizione <e
(Spect(X ′(0))
)= 0 non possia-
mo dedurre nulla: i termini non lineari in X determinano l’eventuale stabilita o instabilitadell’equilibrio. Il caso meccanico puramente posizionale conservativo autonomo, quandol’energia totale e funzione di Lyapunov per la stabilita di un equilibrio, comporta sempre<e(Spect(X ′(0))
)= 0 (verificarlo); dunque, in un certo senso, il secondo metodo e piu
fine del primo. Il primo metodo non e pero sempre inapplicabile nel caso meccanico con-servativo, e infatti utile nella determinazione dell’instabilita, usando quanto annunciatonell’osservazione 1; esempio: la posizione ‘superiore’ del pendolo, notoriamente instabile,e matematicamente rilevabile col primo metodo (fare l’esercizio, notare che il sistema alprimo ordine linearizzato ha un autovalore strettamente positivo).
Prova. Dimostreremo tale asserto utilizzando il Secondo Metodo, quello della funzione diLyapunov: ancora una volta (si pensi anche alla dimostrazione di Lagrange-Dirichlet) pereconomia di pensiero non rispetteremo la costruzione storica dei concetti in studio.
Definiamo inizialmente la matrice:
B =
∫ +∞
0eX′(0)T seX
′(0)sds.
La condizione sullo spettro rende convergente tale integrale improprio, come si puo verifi-care (esercizio).Calcoliamo
X ′(0)TB +BX ′(0) =∫ +∞
0
X ′(0)T eX
′(0)T seX′(0)s + eX
′(0)T seX′(0)sX ′(0)
ds =∫ +∞
0
d
ds
(eX′(0)T seX
′(0)s)ds = −I.
Verifichiamo, poi, che V (x) := (x,Bx) e una funzione di Lyapunov, (x, y) := x · y.
i): e definita positiva in x = 0:V (0) = 0;
V (x) =∫ +∞
0
(xT eX
′(0)T s eX′(0)sx
)ds =
∫ +∞0
∣∣eX′(0)sx∣∣2 ds > 0 per x 6= 0, infatti
l’esponenziale e sempre non singolare, det eB = etrB > 0, ∀B ∈ L(m,R).
ii): LXV (x) = (x, Bx) + (x,Bx) =
=(X ′(0)x,Bx
)+(x,BX ′(0) x
)+O
(|x|3)
=
= (x, (X ′(0)TB +BX ′(0)) x) +O(|x|3)
=
90

=(x, (−I) x
)+O
(|x|3)
= −|x|2 +O(|x|3), esiste pertanto un intorno I di x = 0 in cui
LXV (x) < 0, ∀x ∈ I \ 0 . Ne segue che x = 0 e asintoticamente stabile.
Altre e piu approfondite informazioni sul Primo Metodo di Lyapunov si trovano, peresempio, nell’ultima edizione di Jack Hale: “Ordinary Differential Equations”.
3.8 Stabilita per Sistemi Dinamici infinito-dimensionali
Consideriamo un sistema dinamico infinito-dimensionale. Sia
Q := C∞(R;R)
lo spazio degli stati ove evolve il sistema. Il campo vettoriale (da un altro punto di vista, eun operatore differenziale) sia
X : Q −→ Q
v(·) 7→ X(v(·))(x) := xdv
dx(x).
Studiare la dinamica associata ad X significa ricercare le curve R 3 t 7→ v(t, ·) ∈ Q tali che
v = X(v)
con generico dato iniziale (problema di Cauchy)
v|t=0 = ϕ ∈ Q.
In dettaglio,∂
∂tv(t, x) = x
∂
∂xv(t, x), v(0, x) = ϕ(x).
Si tratta quindi di studiare un problema di Cauchy per un’equazione alle derivate parziali,e la semplice struttura scelta ci permette di scriverne esplicitamente la soluzione:
v(t, x) = ϕ(etx).
Si nota subito che la soluzione identicamente nulla v = 0 e un equilibrio per tale sistemadinamico: X(0) = 0. Per analizzarne l’eventuale Lyapunov stabilita, doteremo dunque ditopologia lo spazio Q := C∞(R;R) mediante opportune norme: vedremo che la non equi-valenza topologica delle norme negli spazi infinito-dimensionali implichera radicali differen-ze qualitative intorno alla stabilita. i) Consideriamo ||v||∞ = supx∈R |v(x)|. Ci chiediamo
se per ogni ε > 0 esiste δ > 0 tale che per ogni dato iniziale ||ϕ||∞ < δ la soluzione v(t, ·)sia tale che ||v(t, ·)||∞ < ε per ogni t ≥ 0; questo e banalmente vero per δ = ε:
||v(t, ·)||∞ = supx∈R|ϕ(etx)| = sup
x∈R|ϕ(x)| = ||ϕ||∞,
91

dunque v = 0 e un equilibrio stabile nella L∞-topologia. ii) Consideriamo ora le norme Lp:
||v||Lp =( ∫
x∈R|v(x)|pdx
)1/p.
Consideriamo quindi la stima della soluzione
||v(t, ·)||Lp =( ∫
x∈R|ϕ(etx)|pdx
)1/p,
facciamo il cambio di variabile d’integrazione τ(x) = etx, otteniamo
||v(t, ·)||Lp =( ∫
x∈R|ϕ(τ)|pe−tdτ
)1/p= e−t/p||ϕ||Lp .
Otteniamo pertanto l’asintotica stabilita nella Lp-topologia. iii) Infine la norma C1,
||v||C1 = supx∈R|v(x)|+ sup
x∈R| ddxv(x)|.
Ora accade che
||v(t, ·)||C1 = supx∈R|ϕ(etx)|+ sup
x∈R| ddxϕ(etx)| = sup
x∈R|ϕ(x)|+ et sup
x∈R| ddxϕ(x)|.
Dunque, comunque scegliamo ϕ, l’andamento esponenziale ci mostra che la soluzione esce, aqualche istante t, da qualunque palla di raggio ε > 0: v = 0 e instabile nella C1-topologia.In questa linea di pensiero, e per ulteriori sviluppi applicativi, si veda per esempio V.I. Yudovich “The Linearization Method in Hydrodynamical Stability Theory”, AmericanMathematical Society - Translations of Mathemat. Monographs, Vol. 74, 1980.
3.9 La Teoria di Floquet
Consideriamo l’equazione differenziale lineare a coefficienti T -periodici in Rm,
x = A(t)x, A(t+ T ) = A(t).
Sia Φ(t) la matrice risolvente che in t = 0 vale l’identita, Φ(0) = I. Ogni altra risolventeΨ(t) e del tipo Ψ(t) = Φ(t)K per arbitrarie matrici non singolari K:
Ψ′(t) = Φ(t)′K = A(t)Φ(t)K = A(t)Ψ(t).
Per esempio, si verifica direttamente che la risolvente che al tempo t = t0 vale l’identitae Φ(t)K con K = Φ(t0)−1; in effetti, tale matrice inversa e definita poiche il teorema diesistenza e unicita ci avverte che det Φ(t) 6= 0.
92

In particolare, la matrice Φ(T ) e non-singolare. Inoltre la funzione matriciale Φ(t) :=Φ(t+T ) e anch’essa una risolvente (lo si verifica direttamente) e dunque si otterra da Φ(t)mediante il prodotto a destra con una opportuna matrice costante K,
Φ(t+ T ) = Φ(t)K,
ove ora K e la matrice che, come si nota subito, vale K = Φ(T ). Dunque:
Φ(t+ T ) = Φ(t)Φ(T ).
Dal fatto che Φ(T ) e non-singolare segue che esiste qualche sua matrice logaritmo B, talecioe che
eB = Φ(T )
(e un teorema standard in teoria delle matrici). Abbiamo ora tutti gli elementi perenunciare e dimostrare il seguente:Teorema di Floquet.
Φ(t) = P (t)eBTt,
ove P (t) e una funzione matriciale T -periodica.Prova.
P (t) = Φ(t)e−BTt.
P (t+ T ) = Φ(t+ T )e−BT
(t+T ) = Φ(t)Φ(T )e−Be−BTt = Φ(t)e−
BTt = P (t).
Applicazione importante. Supponiamo che la curva chiusa [0, T ] 3 t 7→ x(t) sia solu-zione di un’equazione non lineare x = X(x). Proviamo a studiare i moti vicini al primoordine al moto periodico x(t),
d
dt(x(t) + ∆x(t)) = X(x(t) + ∆x(t)) =
= X(x(t)) +X ′(x(t))∆x(t) +O(t, |∆x(t)|2),
siamo dunque condotti allo studio dell’equazione lineare a coefficienti T -periodici:
d
dt∆x(t) = X ′(x(t))∆x(t).
Quindi, posto A(t) := X ′(x(t)), lo spettro di B ci fornisce una indicazione al primo ordinesull’andamento qualitativo delle soluzioni vicine al moto periodico x(t); per esempio, se lospettro e a parte reale negativa, allora l’orbita periodica x(t) possiede una ovvia proprietaattrattiva: partendo da ∆x(0) 6= 0 per t→ +∞ si tende a zero, cioe all’orbita x(t).
93
94

Capitolo 4
Meccanica di Lagrange
La Meccanica Lagrangiana codifica sistematicamente la separazione della determinazione del moto dalla determi-
nazione delle reazioni vincolari per i sistemi a vincoli lisci. E’ il trionfo delle ‘geometrizzazione’ della meccanica:
determinare moti e, in un certo senso –lo vedremo in dettaglio nel capitolo del Calcolo delle Variazioni–, equivalente
alla soluzione del problema geometrico della ricerca di curve di lunghezza stazionaria (minima). La filosofia della
Relativita Generale di Einstein –la teoria moderna della gravitazione– porta alle estreme conseguenze questo punto
di vista. La citazione in copertina a queste dispense e una frase –riportata dai caratteri originali– della “Mecanique
Analitique” di J.L. Lagrange del 1788, in cui apparvero per la prima volta le equazioni, appunto, di Lagrange.
4.1 Dinamica dei Sistemi Olonomi Lisci: Equazioni di La-grange
Consideriamo un sistema particellare di n di punti materialiMi di massami > 0, i = 1, ..., nsoggetto alle forze:
Fi = Fi(OP1, ..., OPn,v1, ...,vn, t)
Sia U(⊂ RN ) × R 3 (q, t) 7→ OPi = OPi(q1, . . . , qN , t), N ≤ 3n, una rappresentazionelocale di una varieta vincolare (vincolo olonomo) St, eventualmente dipendente dal tempo(vincolo mobile).
Notiamo che se intendiamo rappresentare la velocita dei punti materiali Mi, transitantiper i punti geometrici OPi, lungo un moto descritto in coordinate Lagrangiane da t 7→qh(t), h = 1, ..., N , scriveremo
vi(t) =d
dtOPi(q1(t), . . . , qN (t), t) =
N∑h=1
∂
∂qhOPi(q, t)|q=q(t)
dqhdt
(t) +∂
∂tOPi(q, t)|q=q(t)
Ne deriva in modo naturale la seguente definizione di derivata totale ddt dell’immersione
vincolare, la quale, ad ogni dato istante t, prende un vettore q ∈ RN , che e lo spazio
95

tangente a (ogni) q di U , RN = TqU , e lo manda, allo stesso istante t, nel vettore v =ddtOP ∈ TOP (q,t)R
3n , piu in dettaglio:
U × RN × R −→ R3n × R3n × R
(q, q, t) 7−→(OP (q, t),
d
dt
(OPi
)(q, q, t) :=
N∑h=1
∂
∂qhOPi(q, t)qh +
∂
∂tOPi(q, t), t
)Una definizione analoga si realizza pure (la useremo) per la derivata totale seconda:
d2
dt2(OPi
)(q, q, q, t) =
N∑h=1
∂
∂qhOPi(q, t)qh +
N∑h,k=1
∂2
∂qk∂qhOPi(q, t)qhqk + 2
N∑h
∂2
∂t∂qhOPi(q, t)qh +
∂2
∂t2OPi(q, t)
I moti dinamicamente possibili per il nostro sistema [t0, t1] 3 t 7→ OP (t) = OP (q(t), t),sono tutti e soli quelli che soddisfano al principio di D’Alembert:
n∑i=1
[mi
d2
dt2OPi(t)− Fi(OP (t),
d
dtOP (t), t)
]· δPi = 0,
∀t ∈ [t0, t1], ∀(δPi)i=1,...,n ∈ TOP (t)St.
Si tratta ora di dettagliare tale relazione usando la rappresentazione vincolare. Gli sposta-menti virtuali si rappresentano:
δPi =N∑h=1
∂
∂qhOPi(q(t), t) δqh
per arbitrari (δqh)h=1,...,N ∈ RN . Otteniamo:
N∑h=1
[ n∑i=1
mid2
dt2OPi(t) ·
∂
∂qhOPi(q, t)−
n∑i=1
Fi(OP (t),d
dtOP (t), t) · ∂
∂qhOPi(q, t)
]δqh = 0
Gia introdotte, le componenti Lagrangiane della Sollecitazione sono:
Qh(q, q, t) :=n∑i=1
Fi(OP (q, t),d
dtOP (q, q, t) · ∂
∂qhOPi(q, t)
Infine definiamo
τh(q, q, q, t) :=
n∑i=1
mid2
dt2OP i(q, q, q, t) ·
∂
∂qhOPi(q, t)
96

Il pr. di D’Alembert diventa
N∑h=1
(τh(q, q, q, t)−Qh(q, q, t))δqh = 0 ∀ (δqh)h=1,...,N arbitrari in RN ,
dunque t 7→ q(t) e dinamicamente possibile se e solo se
τh(q, q, q, t) = Qh(q, q, t).
Dobbiamo dettagliare le τh(q, q, q, t). Questo sara effettuato usando la funzione EnergiaCinetica nelle variabili Lagrangiane libere T (q, q, t):
T (q, q, t) =1
2
n∑i=1
mi
∣∣∣∣ ddtOP i(q, q, t)∣∣∣∣2
(Un po’ di dettagli di facile algebra mostrano che T e un polinomio quadratico nelle q e acoeff. dipendenti da q e t. Si ritornera su cio). Calcoliamo
(i)∂
∂qhT (q, q, t) =
n∑i=1
mid
dtOP i(q, q, t) ·
∂
∂qh
d
dtOP i(q, q, t) =
(si veda def. sopra di derivata totale) =n∑i=1
mivi ·∂
∂qhOP i
(ii)d
dt
∂
∂qhT (q, q, t) =
n∑i=1
miai ·∂
∂qhOP i +
n∑i=1
mivi ·d
dt
∂
∂qhOP i =
= τh +n∑i=1
mivi ·d
dt
∂
∂qhOP i
Inoltre vale la commutazione (nel caso C2):
d
dt
∂
∂qhOP i =
N∑k=1
∂2
∂qk∂qhOP i qk +
∂2
∂t∂qhOP i =
N∑k=1
∂2
∂qh∂qkOP i qk +
∂2
∂qh∂tOP i =
=∂
∂qh
d
dtOP i =
∂
∂qhvi ,
cosicchen∑i=1
mivi ·d
dt
∂
∂qhOP i =
n∑i=1
mivi ·∂
∂qhvi =
∂T
∂qh
97

Giungiamo alla conclusione che la conoscenza della funzione Energia Cinetica T (q, q, t) edelle Comp. Lagr. della Sollecitazione Qh(q, q, t) sono sufficienti per costruire le equazionidifferenziali determinanti i moti del sistema, le equazioni di Lagrange:
d
dt
∂T
∂qh− ∂T
∂qh= Qh h = 1, ..., N
Queste rappresentano un sistema di equazioni differenziali del 20 ordine in RN nelle inco-gnite t 7→ q(t) ∈ RN . Condizione necessaria per l’applicabilita del teorema di esistenzae unicita di Cauchy e che che tale sistema si possa porre in forma normale cioe nellaforma q = A(q, q, t). A tal scopo, dettagliamo la struttura della funzione Energia CineticaT (q, q, t):
T (q, q, t) =1
2
n∑i=1
mi
∣∣∣∣ ddtOPi(q, q, t)∣∣∣∣2 =
=1
2
n∑i=1
mi(N∑h=1
∂
∂qhOPi(q, t)qh +
∂
∂tOPi(q, t)) · (
N∑k=1
∂
∂qkOPi(q, t)qk +
∂
∂tOPi(q, t)),
T (q, q, t) =1
2
N∑h,k=1
ahk(q, t)qhqk +N∑h
bh(q, t)qh + d(q, t),
dove
ahk(q, t) :=
n∑i=1
mi∂
∂qhOPi(q, t) ·
∂
∂qkOPi(q, t),
bh(q, t) :=n∑i=1
mi∂
∂qhOPi(q, t) ·
∂
∂tOPi(q, t), d(q, t) :=
1
2
n∑i=1
mi∂
∂tOPi(q, t) ·
∂
∂tOPi(q, t).
Nel caso di vincoli fissi:
T (q, q) =1
2
N∑h,k=1
ahk(q)qhqk
In entrambi i casi (v. fissi o mobili), la funzione ahk(q, t) e a valori nelle matrici simmetrichedefinite positive. Infatti, per ogni q e t fissato, la mappa lineare
RN 3 λ = (λ1, ..., λN ) 7→ V(λ) =( N∑h=1
∂OP 1
∂qhλh, ...,
N∑h=1
∂OPn∂qh
λh
)∈ R3n
e a rango massimo, ha dunque nucleo banale, vale zero solo per λ = (λ1, ..., λN ) = 0.Indichiamo con • il seguente prodotto scalare non degenere in R3n:
V = (V 1, ..., V i, ..., V n) ∈ R3n
98

V •W :=
n∑i=1
miV i ·W i
Pertanto, la seguente quantita, che e la norma in RN definita come immagine inversa (orestrizione, pull-back) della norma associata al prodotto scalare non degenere • in R3n,risulta in effetti definita positiva:
|V(λ)|2• := V(λ) •V(λ) =
N∑h,k=1
ahk(q)λhλk ≥ 0, e vale 0 sse λ = (λ1, ..., λN ) = 0.
Infatti, ovviamente |V(λ)|2• ≥ 0, e dato che • e non degenere, |V(λ)|2• = 0 se e solo seV(λ) = 0, se e solo se (V ha nucleo banale) λ = 0. Scriviamo ora in dettaglio le equazioni
di Lagrange, si tratta di indagare inizialmente sul termine cinematico τh(q, q, q, t).:
d
dt
∂T
∂qh− ∂T
∂qh=
d
dt
( N∑k=1
ahk(q, t)qk + bh(q, t))− ∂T
∂qh=
N∑k=1
ahk(q, t)qk + (termini in q, q, t)
Dunque le equazioni sono della forma
N∑k=1
ahk(q, t)qk + (termini in q, q, t) = Qh(q, q, t),
la matrice ahk(q, t) e invertibile e quindi otteniamo infine la struttura qk = Ak(q, q, t), k =1, ..., N . Si ottiene cosı la forma normale delle equazioni di Lagrange:
x :=
(qv
), x = X(x, t), X : R2N × R→ R2N , X :
((qv
), t
)7→(
vA(q, v, t)
)Si puo dunque applicare il teorema di esistenza e unicita di Cauchy per i problemi di
Cauchy: al tempo t = t0 si cerca la soluzione per cui q(t0) = q0, q(t0) = q0, e vale quindiil cosiddetto determinismo classico.
Si noti che la funzione A(q, q, t) e di classe C1 se l’immersione vincolare e di classe C3.Esercizio (importante): Si verifichi che nel caso OP (q∗, t) ≡ OP ∗ e Qh(q∗, 0, t) ≡ 0 perogni t, allora q(t) ≡ q∗ e soluzione delle equazioni di Lagrange.
CASO CONSERVATIVO. In tal caso
Qh(q) = −∂ U∂qh
(q),
si definisce la funzione Lagrangiana
L(q, q, t) := T (q, q, t)− U(q)
99
e si verifica facilmente che le equazioni di Lagrange si scrivono unicamente usando talefunzione Lagrangiana L : RN × RN × R→ R:
d
dt
∂L
∂qh− ∂L
∂qh= 0 h = 1, . . . N.
INVARIANZA GEOMETRICA DELLE EQUAZIONI DI LAGRANGE. Sia L(q, q, t)la funzione Lagrangiana di un sistema meccanico a vincoli lisci, olonomi, bilaterali, peresempio un sistema particellare di n punti materiali.
Sia OPi = OPi(q1, . . . , qN , t), N ≤ 3n, una rappresentazione locale della varieta vin-colare. I moti dinamicamente possibili qh(t), h = 1, . . . , N , sono tutti e soli quelli cherisolvono:
(1)d
dt
∂L
∂qh− ∂L
∂qh= 0, h = 1, . . . , N
Mostriamo che le equazioni di Lagrange (1) sono invarianti (in forma) rispetto al cambiodei parametri lagrangiani q1, . . . , qN , cioe hanno una struttura geometricamente invarianterispetto al gruppo dei diffeomorfismi locali Qh = Qh(q1, . . . , qN )
(2) det
(∂Qh∂qk
(q)
)6= 0;
naturalmente OP i(Q1, . . . ,QN , t) := OP i(q(Q), t), ove q(Q) e l’inversa di Q(q), sarauna nuova rappresentazione locale della varieta vincolare. Piu precisamente sia Qh =Qh(q1, . . . , qN ) un diffeomorfismo locale da un aperto di RN nella sua immagine di RN esia
(3) L(Q, Q, t) := L
(q(Q),
∂qk∂Qh
(Q)Qh, t),
La sopraccennata invarianza si traduce nella seguente affermazione:
Il moto, la curva individuata dall’N -upla t 7→ qh(t), risolve (1) se e solo se, per ognidiffeomorfismo locale Q = Q(q), l’N -upla
(4) t 7→ Qh(t) := Qh(q(t))
risolve
(5)d
dt
∂L∂Qh
− ∂L∂Qh
= 0, h = 1, . . . , N,
ove L e definita in (3).
100

Prova. Preliminarmente osserviamo che qk = ∂qk∂Qh (Q)Qh, cosicche ∂qk
∂Qh= ∂qk
∂Qh . Detta-
gliamo il primo membro di (5):
ddt
(∂L∂qk
∂qk∂Qh
)− ∂L
∂qk
∂qk∂Qh −
∂L∂qk
∂2qk∂Qh∂Qj Qj =
ddt
∂L∂qk
∂qk∂Qh + ∂L
∂qk
∂2qk∂Qj∂Qh Qj −
∂L∂qk
∂qk∂Qh −
∂L∂qk
∂2qk∂Qh∂Qj Qj =
(restringendosi a diffeomorfismi di classe Cρ con ρ ≥ 2 , onde: ∂2qk∂Qj∂Qh = ∂2qk
∂Qh∂Qj )
=
(d
dt
∂L
∂qk− ∂L
∂qk
)∂qk∂Qh
, cioe
(6)d
dt
∂L∂Qh
− ∂L∂Qh
=
(d
dt
∂L
∂qk− ∂L
∂qk
)∂qk∂Qh
e l’affermazione di cui sopra e vera per (2).
4.2 Sugli Integrali Primi delle Equazioni di Lagrange
1) Sia data L : RN × RN × R→ R tale che
∂L
∂qh′= 0, cioe L = L(q1, . . . , qh′−1, qh′+1, . . . , q1, . . . , qN , t)
In tal caso, scrivendo semplicemente l’equazione di Lagrange relativa all’indice h′, ottenia-
mod
dt
∂L
∂qh′= 0
cioe la funzione scalare
∂L
∂qh′(q1, . . . , qh′−1, qh′+1, . . . , q1, . . . , qN , t)
e un integrale primo, detto integrale di ciclicita. 2) Sia data L : RN × RN × R → R tale
che∂L
∂t= 0, cioe L = L(q, q)
In tal caso, la seguente funzione E(q, q) e un integrale primo, detto integrale primo diJacobi,
E(q, q) :=N∑h=1
∂L
∂qhqh − L.
101

Infatti, la derivata di Lie di E rispetto al campo vettoriale Lagrangiano vale:
d
dtE(q, q) =
N∑h=1
d
dt
∂L
∂qhqh +
N∑h=1
∂L
∂qhqh −
N∑h=1
∂L
∂qhqh −
N∑h=1
∂L
∂qhqh =
=N∑h=1
( ddt
∂L
∂qh− ∂L
∂qh
)qh = 0.
Osservazione Questi due semplici esempi di integrali primi mostrano un aspetto algebrico-geometrico in un certo senso inatteso: in entrambi i casi notiamo che la Lagrangiana instudio e invariante rispetto ad un gruppo di trasformazioni; nel primo caso, c’e un gruppo(λ-parametrico) di trasformazioni delle coordinate
R× RN 3 (λ, q) 7→ q = q(λ, q) := (q1, . . . , qh′−1, qh′ + λ, qh′+1, . . . , qN ) ∈ RN ,
nel secondo caso, la Lagrangiana in studio e invariante rispetto al seguente gruppo (λ-parametrico) di trasformazioni del tempo:
R× R 3 (λ, t) 7→ t = t(λ, t) := t+ λ ∈ R.
Esiste una teoria generale (si veda piu avanti), elaborata nel 1918 da Emmy Nother, checataloga gli integrali primi (gli invarianti dinamici) generati da piu generali gruppi di tra-sformazioni che lasciano invariata la funzione di Lagrange; tali gruppi si dicono simmetrieper la funzione di Lagrange in studio.
4.3 Teoria di Routh
E’ noto che per un generico sistema dinamico x = X(x), X : Rm → Rm, la conoscenza diun integrale primo ϕ : Rm → R abbassa la ‘dimensionalita’ del nostro problema dinami-co di un’unita, da Rm a Sm−1 = ϕ−1(ϕ(x0)). Mostreremo che nel caso Lagrangiano laconoscenza di un integrale primo di ciclicita comporta invece una riduzione di due unita:da 2N a 2N−2. Inoltre, si riesce a operare una riduzione del sistema dinamico Lagrangianoiniziale L : R2N → R ad un nuovo sistema Lagrangiano ridotto (di Routh) L : R2N−2 → R.
Supponiamo che le prime k coordinate non siano presenti in L,
∂L
∂qM= 0,
cioe L = L(qk+1, . . . , qα, . . . , qN , q1, . . . , qN , t), M = 1, . . . , k α = k + 1, . . . , N.
L’unica ipotesi tecnica su L e la seguente, banalmente soddisfatta nel caso Lagrangianomeccanico (L = T − U):
∂2
∂qk∂qhL(q, q, t) sia definita positiva.
102

Consideriamo i k integrali primi generati da ∂L∂qM
= 0:
(∗) fM =∂L
∂qM(qk+1, . . . , qα, . . . , qN , q1, . . . , qN , t), M = 1, . . . , k.
Supponiamo di essere interessati a dei (o ad un) problemi(a) di Cauchy q0, q0 tali(e) che gliintegrali primi fM valgano cM = fM (q0, q0, t0). L’ipotesi tecnica sopra fatta ci garantisceche pure la funzione matriciale
(∗∗) ∂2
∂qM∂qPL(q, q, t)
∣∣∣M,P=1,...,k
e definita positiva.
Questo ci permette di applicare il teorema della funzione inversa in (∗) ed esprimere le qMin funzione delle fM parametricamente per ogni qα, qβ, α, β = k + 1, . . . , N :
qM = SM (. . . , cP , . . . ; . . . , qα, . . . , qβ, . . . , t)
In effetti, basterebbe che det(
∂2
∂qM∂qPL(q, q, t)
)6= 0, il fatto che invece valga (molto di
piu) (∗∗) ci dice che tale inversione e globale, e questo in virtu di un generale teoremadi inversione globale, riportato (e dimostrato) per esempio nel capitolo della meccanicaHamiltoniana e trasf. canoniche. Definiamo la Lagrangiana Ridotta:
L : RN−k × RN−k × R→ R,
(qα, qβ, t) 7→ L := L(qα, SM (cP ; qα, qβ, t), qβ, t)−k∑
M=1
cM SM (cP ; qα, qβ, t)
Enunciamo infine il
Teorema di Routh La soluzione dei pr. di Cauchy che rendono fM = cM si ottengonorisolvendo le equazioni di Lagrange ridotte per L, ottenendo cosı t 7→ qα(t), ed effettuandole seguenti integrazioni dirette per ottenere le rimanenti t 7→ qM (t):
(?) qM (t) = qM (t0) +
∫ t
t0
SM (cP ; qα(t′), qβ(t′), t′)dt′.
Prova. Scriviamo la generica γ-esima equazione di Lagrange per L, per γ = k + 1, . . . , N ,
0 =d
dt
∂L∂qγ− ∂L∂qγ
=
=d
dt
( ∂L∂qγ
+
k∑M=1
∂L
∂qM
∂SM∂qγ
−k∑
M=1
cM∂
∂qγSM (cP ; qα, qβ, t)
)−
103

− ∂L∂qγ−
k∑M=1
∂L
∂qM
∂SM∂qγ
+k∑
M=1
cM∂
∂qγSM (cP ; qα, qβ, t) =
=d
dt
∂L
∂qγ− ∂L
∂qγ(si e utilizzato il fatto che
∂L
∂qM= cM )
In altre parole, se in RN−k la curva t 7→ qα(t) risolve le equ. di Lagrange per L, allora la
curva t 7→ (qM (t), qα(t)), dove le qM (t) sono ottenute mediante l’integrazione diretta (?),risolve pure le originali equ. di Lagrange per L in RN .
Esercizio: Si consideri la Lagrangiana del problema di Kepler piano: L(r, θ, r, θ). Siosservi che esiste un integrale di ciclicita e che corrisponde alla conservazione della vel.areolare. Si costruisca, per ogni fissati valore c di tale integrale primo, il Lagrangianoridotto L(r, r) e se ne discutano le soluzioni qualitativamente, osservando che e del tipo
L = 12µ− U
effc (r) (ellissi, parabola, iperboli.)
4.4 Teoria di Noether
Mettiamo in evidenza come simmetrie della funzione Lagrangiana inducano integrali primi.
Teorema di Emmy Noether 1 Sia Qh = Qh(λ, q), λ ∈ I = I (intervallo aperto reale),0 ∈ I, una famiglia mono–parametrica di diffeomorfismi locali (cioe, cambi di coordinatelocali nella varieta vincolare) tale che:
(i) Qh(0, q) = qh ,
(ii) L(Qh(λ, q),
∑Nk=1
∂Qh∂qk
(λ, q)qk, t)
= L(q, q, t) ∀λ ∈ I ,
allora la funzione:
(6) f(q, q, t) :=N∑h=1
∂L
∂qh(q, q, t)
∂Qh∂λ
(0, q)
e un integrale primo di (1).
Osservazione. In realta, la corretta completa ipotesi e che Q(λ, q) sia un’azione del gruppoadditivo dei reali sulla varieta vincolare; detto in altre parole, Q(λ, q) sia un flusso, in
1E. Noether, Invariant variation problems. Translated from the German (Invariante Variationsprobleme,Nachr. Akad. Wiss. Gottingen Math.-Phys. Kl. II 1918, 235-257). Transport Theory Statist. Phys. 1(1971), no. 3, 186-207.
104

tal caso il campo vettoriale che lo genera e X(q) = ∂Q∂λ (λ, q)
∣∣λ=0
e l’espressione (6) e unoscalare invariante, in quanto valutazione di una forma su un vettore.
Prova. Supposta la condizione (i), la (ii) vale per ogni sistema Lagrangiano solo perλ = 0 , la validita della (ii) per la nostra particolare funzione Lagrangiana L dice insostanza che il primo membro di quell’uguaglianza e indipendente da λ in I.
Sia qh(t) un moto risolvente (1), allora, dalle (ii):
∂
∂λ
[L(Q(λ, q(t)),
N∑k=1
∂Qh∂qk
(λ, q(t))qk(t), t)
] ∣∣∣∣λ=0
= 0
(nelle formule che seguono omettiamo il simbolo della sommatoria sugli indici doppi)
0 = ∂L∂qh
(q(t), q(t), t)∂Qh∂λ (0, q(t)) + ∂L∂qh
(q(t), q(t), t) ∂2Qh
∂λ∂qk(0, q(t))qk(t) =
= ∂L∂qh
(q(t), q(t), t)∂Qh∂λ (0, q(t)) + ∂L∂qh
(q(t), q(t), t) ddt∂Qh∂λ (0, q(t)) =
= ∂L∂qh
(q(t), q(t), t)∂Qh∂λ (0, q(t)) + ddt
(∂L∂qh
(q(t), q(t), t)∂Qh∂λ (0, q(t)))
+
− ddt
(∂L∂qh
(q(t), q(t), t))∂Qh∂λ (0, q(t)) =
= −(ddt
∂L∂qh− ∂L
∂qh
)∂Qh∂λ + d
dt
(∂L∂qh
∂Qh∂λ
),
q(t) risolve (1) , onde:
(7)d
dt
[N∑h=1
∂L
∂qh(q(t), q(t), t)
∂Qh∂λ
(0, q(t))
]= 0
Esempio: sistema di n particelle materiali di massa m1, . . . ,mn , non vincolate, inte-ragenti con forze interne generate da energia potenziale dipendente dai mutui vettori
differenza, N = 3n−gradi di liberta : q1 = x(1)1 , . . . , qN = x
(n)3 ,
L = T − U =1
2
n∑i=1
mi
3∑α=1
(x(i)α )2 − U(. . . , x(i) − x(j), . . . i < j)
Sia a un arbitrario vettore di R3 , allora una famiglia mono-parametrica di trasforma-zioni che lasciano L inalterata e la seguente famiglia di traslazioni indotte da a :
(8) X(i)α (λ, x, . . . ) = x(i)
α + λaα ,
105

infatti:X(i)α = x(i)
α e X(i) −X(j) = x(i) − x(j).
Otteniamo dalla (6) il seguente integrale primo:
I =
n∑i=1
3∑α=1
mix(i)α aα =
(n∑i=1
miv(i)
)· a ,
data l’arbitrarieta di a , concludiamo con il risultato (ben noto): il vettore quantita di moto
(9) P =
n∑i=1
miv(i)
si conserva lungo i moti dinamicamente possibili.
Rafforziamo le ipotesi: ora le forze interne siano generate da un’energia potenziale
dipendente dalle mutue distanze, N = 3n−gradi di liberta : q1 = x(1)1 , . . . , qN = x
(n)3 .
L = T − U =1
2
n∑i=1
mi
3∑α=1
(x(i)α )2 − U(. . . , | x(i) − x(j) |R3 , . . . i < j)
Sia ora b = (b1, b2, b3) un arbitrario vettore di R3. Possiamo definire una matrice
emisimmetrica W =
0 w12 w13
−w12 0 w23
−w13 −w23 0
tale che ∀x ∈ R3 :
(10) Wx = b ∧ x ; ∧ : pr. vettoriale di R3
b ∧ x =
b2x3 − b3x2
b3x1 − b1x3
b1x2 − b2x1
,
Wx =
0 w12 w13
−w12 0 w23
−w13 −w23 0
x1
x2
x3
=
w12x2 + w13x3
−w12x1 + w23x3
−w13x1 − w23x2
,
onde: w12 = −b3 , w13 = b2 , w23 = −b1 .Consideriamo ora la matrice esponenziale:
(11) R = eλW (λ ∈ R) .
Si verifica facilmente che R(λ) e una rotazione:(eλW
)T=
(I − λW + λ2W
2
2!− λ3W
3
3!+ . . .
)= e−λW ,
106

e dunque RTR = e−λW+λW = I ; inoltre : detR = det(eλW
)= etr(λW ) = e0 = 1 .
Ritorniamo al nostro sistema particellare. Consideriamo la seguente famiglia mono–parametrica, di trasformazioni che lasciano inalterata L , cioe le rotazioni:
(12) X(i)(λ, x) = R(λ)x(i) .
Vale: ∣∣X(i)∣∣2 =| x(i) |2 e∣∣X(i) −X(j)
∣∣ =| x(i) − x(i) | .
Dalla (6) otteniamo il seguente integrale primo:
I =∑N
h=1∂L∂qh
(q, q, t)∂Qh∂λ (0, q)
=∑n
i=1
∑3α=1mix
(i)α
∂∂λ
(R(λ)x(i)
)α
∣∣∣λ=0
=∑n
i=1
∑3α=1mix
(i)α
∂∂λ
(eλWx(i)
)α
∣∣∣λ=0
=∑n
i=1
∑3α=1mix
(i)α
(WeλWx(i)
)α
∣∣∣λ=0
=∑n
i=1
∑3α=1mix
(i)α
(Wx(i)
)α
=∑n
i=1
∑3α=1mix
(i)α (b ∧ x(i))α
=∑n
i=1mix(i) · (b ∧ x(i))
=∑n
i=1 b · x(i) ∧mix(i)
= b ·∑n
i=1 x(i) ∧mix
(i)
cioe I = b · M0 , ove M0 e il momento della quantita di moto (rispetto all’origine delsistema cartesiano). Data l’arbitrarieta del vettore b otteniamo il risultato (ben noto): pertali sistemi meccanici il vettore momento della quantita di moto
(13) M0 =
n∑i=1
x(i) ∧mix(i)
si conserva lungo i moti dinamicamente possibili.
Riassumendo: omogeneita (invarianza per traslazioni) e isotropia (invarianza per rota-zioni) della funzione Lagrangiana implicano rispettivamente conservazione della quantitadi moto e del momento della quantita di moto.
107
108

Capitolo 5
Piccole Oscillazioni nei SistemiLagrangiani
Supponiamo che x∗ = (q∗, 0) = (0, 0) = 0 ∈ R2N sia d’equilibrio stabile per un sistemaLagrangiano a vincoli fissi e forze puramente conservative. Supponiamo inoltre che talestabilita sia riconoscibile dallo studio delle derivate seconde dell’energia potenziale U inq∗ = 0, cioe ∂U
∂qh(0) = 0 e ∂2U
∂qh∂qk(0)λhλk > 0 ∀λ 6= 0. Studiamo la linearizzazione delle
equazioni di Lagrange nell’intorno di x∗ = 0. Mediante le funzioni energia cinetica epotenziale
T (q, q) =1
2ahk(q)qhqk, U = U(q),
le equazioni di Lagrange sono:
(1)d
dt
∂T∂qh− ∂T∂qh
= − ∂U∂qh
(h = 1, . . . , N)
piu in dettaglio (ove con la virgola si intende la derivata parziale ahk,l := ∂ahk∂ql
):
d
dt[ahk(q)qk]−
1
2alm,h(q)qlqm = −U,h(q),
ahk,mqmqk + ahkqk −1
2alm,hqlqm = −U,h,
moltiplico per a−1jh (e noto che det(a) > 0):
(2) qj = a−1jh
(1
2akm,h − ahk,m
)qmqk − a−1
jh U,h.
109

Le equazioni di Lagrange (2) in RN si scrivono come un sistema del primo ordine in R2N ,x =
(qζ
),
(3)
qi = ζi,
ζj = [a−1jh
(12akm,h − ahk,m
)]ζmζk − a−1
jh U,h.
Il sistema (3) e del tipo: x(t) = X(x(t)). Scriviamo il sistema linearizzato: x(t) =X ′(0)x(t), con polo in x = (q, ζ) = (0, 0).
Si ottiene:
(4)
qi = ζi
ζj = −a−1jh (0)U,hk(0)qk
.
Ritorniamo al secondo ordine e otteniamo cosı le equazioni di Lagrange linearizzate:
(5) aij(0)qj = −U,ij(0)qj .
Verificare (importante!) che tali equazioni (5) si ottengono, tra l’altro, scrivendo le equa-zioni di Lagrange relative ad “un” sistema con
energia cinetica : T (0) = 12aij(0)qiqj
ed energia potenziale : U (0) = 12U,ij(0)qiqj ,
cioe utilizzando lo sviluppo di Taylor di T e U arrestato al secondo ordine in x = (q, q).
Notiamo che :
aij(0) e (simmetrica) definita positiva,
U,ij(0) e (simmetrica) definita positiva.Operiamo un cambio delle coordinate lagrangiane in modo da semplificare la rappre-
sentazione delle soluzioni di (5).Facciamo un PRIMO cambio q 7→ q′ che diagonalizza aij(0) (e simmetrica, onde esiste
una opportuna rotazione q′ = Rq) e lascia invariati T (0) e U (0):T (0) =
1
2
N∑i,j=1
aij(0)qiqj =1
2
N∑i=1
ai(q′i)
2 (ai > 0), i = 1, . . . , N,
U (0) =1
2
N∑i,j=1
U,ij(0)qiqj =1
2
N∑i,j=1
U ′ijq′iq′j ,
ove U ′ij e ancora simmetrica.
Operiamo un SECONDO cambio: q′′i :=√ai q
′i , ora T (0) e U (0) sono:
T (0) =1
2
N∑i=1
(q′′i )2
U (0) =1
2
N∑i,j=1
U ′ij√aiaj
q′′i q′′j .
110

Con un TERZO cambio diagonalizziamo U ′′ij =U ′ij√aiaj
; come nel primo cambio, tale tra-
sformazione e una rotazione; otteniamo, in queste ultime coordinate (dette coordinatenormali):
(6)
T (0) =
1
2
N∑i=1
q2i
U (0) =1
2
N∑i=1
ω2i qi
2.
Infine le equazionid
dt
∂T (0)
∂qi− ∂T (0)
∂qi= −∂U
(0)
∂qirisultano:
(7) qi = −ω2i qi (i = 1, . . . , N).
Le N equazioni (7) sono risolvibili elementarmente, si tratta di N oscillatori armoniciciascuno con periodo Ti = 2π
ωi; diremo le ωi frequenze caratteristiche. Si osservi che abbia-
mo usato le proprieta di invarianza delle equazioni di Lagrange per cambio di coordinateLagrangiane.
Supponiamo ora che il nostro problema sia quello di determinare le frequenze caratteri-stiche ωi (e non gia la trasformazione S, q = Sq, che muta le originali coordinate q nellecoordinate normali q). Vettorialmente le (5) si scrivono:
(8) a(0)q +∇2U(0)q = 0,
ove a(0) = (ahk(0))h,k=1,...,N , ∇2U(0) = (U,hk(0))h,k=1,...,N . Denotiamo, come anticipato,con S la composizione delle tre trasformazioni
(9) q = Sq (detS 6= 0).
Sostituendo in (8) otteniamo:
(10) a(0)S−1q +∇2U(0)S−1q = 0.
D’altra parte affermare che S diagonalizza la matrice cinetica a(0) nella matrice identica Isignifica
2T (0) = ahk(0)qhqk = (a(0)q, q) = (a(0)S−1q, S−1q) = (S−Ta(0)S−1q, q) = (q, q),
cioe
(11) S−Ta(0)S−1 = I.
111

Analogamente
(12) S−T∇2U(0)S−1 = Ω2, ove
(13) Ω2 :=
ω2
1 0 . . . 00 ω2
2 0 . . . 0...
.... . .
...0 . . . . . . 0 ω2
N
.
Moltiplicando a sinistra la (10) per S−T otteniamo la (7), cioe:
(14) q + Ω2q = 0.
E’ banale osservare che ω e una frequenza caratteristica se e solo se ω2 e un autovalore diΩ2, cioe se e solo se:
0 = det(Ω2 − ω2I
),
0 = det(S−T∇2U(0)S−1 − ω2S−Ta(0)S−1
),
0 = det S−T det(∇2U(0)− ω2a(0)
)det S−1,
onde ω e frequenza caratteristica se e solo se:
(15) det(∇2U(0)− ω2a(0)
)= 0.
112
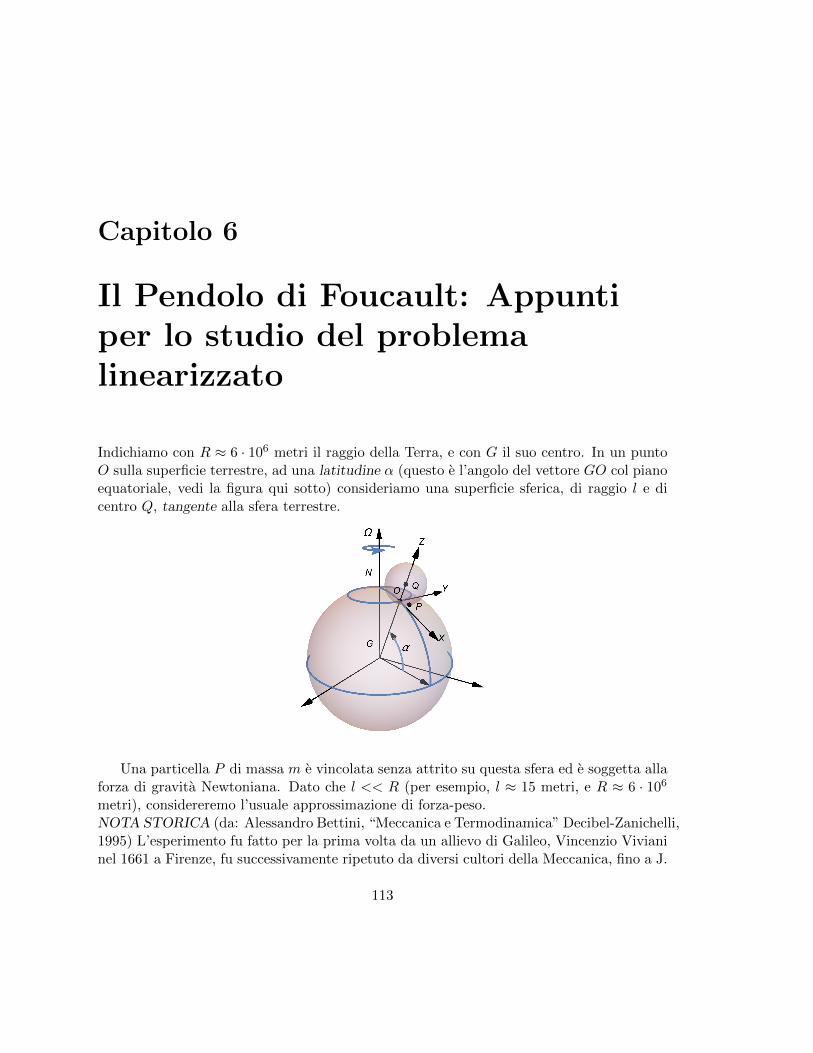
Capitolo 6
Il Pendolo di Foucault: Appuntiper lo studio del problemalinearizzato
Indichiamo con R ≈ 6 · 106 metri il raggio della Terra, e con G il suo centro. In un puntoO sulla superficie terrestre, ad una latitudine α (questo e l’angolo del vettore GO col pianoequatoriale, vedi la figura qui sotto) consideriamo una superficie sferica, di raggio l e dicentro Q, tangente alla sfera terrestre.
Una particella P di massa m e vincolata senza attrito su questa sfera ed e soggetta allaforza di gravita Newtoniana. Dato che l << R (per esempio, l ≈ 15 metri, e R ≈ 6 · 106
metri), considereremo l’usuale approssimazione di forza-peso.NOTA STORICA (da: Alessandro Bettini, “Meccanica e Termodinamica” Decibel-Zanichelli,1995) L’esperimento fu fatto per la prima volta da un allievo di Galileo, Vincenzio Vivianinel 1661 a Firenze, fu successivamente ripetuto da diversi cultori della Meccanica, fino a J.
113
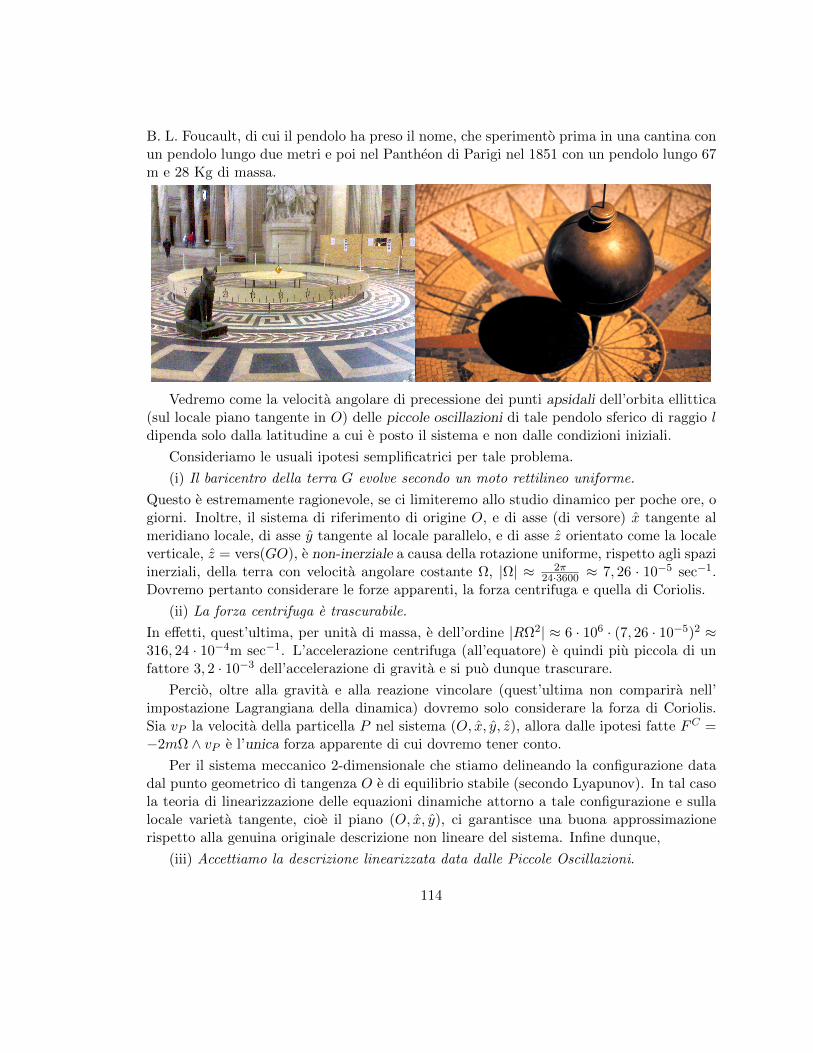
B. L. Foucault, di cui il pendolo ha preso il nome, che sperimento prima in una cantina conun pendolo lungo due metri e poi nel Pantheon di Parigi nel 1851 con un pendolo lungo 67m e 28 Kg di massa.
Vedremo come la velocita angolare di precessione dei punti apsidali dell’orbita ellittica(sul locale piano tangente in O) delle piccole oscillazioni di tale pendolo sferico di raggio ldipenda solo dalla latitudine a cui e posto il sistema e non dalle condizioni iniziali.
Consideriamo le usuali ipotesi semplificatrici per tale problema.
(i) Il baricentro della terra G evolve secondo un moto rettilineo uniforme.
Questo e estremamente ragionevole, se ci limiteremo allo studio dinamico per poche ore, ogiorni. Inoltre, il sistema di riferimento di origine O, e di asse (di versore) x tangente almeridiano locale, di asse y tangente al locale parallelo, e di asse z orientato come la localeverticale, z = vers(GO), e non-inerziale a causa della rotazione uniforme, rispetto agli spaziinerziali, della terra con velocita angolare costante Ω, |Ω| ≈ 2π
24·3600 ≈ 7, 26 · 10−5 sec−1.Dovremo pertanto considerare le forze apparenti, la forza centrifuga e quella di Coriolis.
(ii) La forza centrifuga e trascurabile.
In effetti, quest’ultima, per unita di massa, e dell’ordine |RΩ2| ≈ 6 · 106 · (7, 26 · 10−5)2 ≈316, 24 · 10−4m sec−1. L’accelerazione centrifuga (all’equatore) e quindi piu piccola di unfattore 3, 2 · 10−3 dell’accelerazione di gravita e si puo dunque trascurare.
Percio, oltre alla gravita e alla reazione vincolare (quest’ultima non comparira nell’impostazione Lagrangiana della dinamica) dovremo solo considerare la forza di Coriolis.Sia vP la velocita della particella P nel sistema (O, x, y, z), allora dalle ipotesi fatte FC =−2mΩ ∧ vP e l’unica forza apparente di cui dovremo tener conto.
Per il sistema meccanico 2-dimensionale che stiamo delineando la configurazione datadal punto geometrico di tangenza O e di equilibrio stabile (secondo Lyapunov). In tal casola teoria di linearizzazione delle equazioni dinamiche attorno a tale configurazione e sullalocale varieta tangente, cioe il piano (O, x, y), ci garantisce una buona approssimazionerispetto alla genuina originale descrizione non lineare del sistema. Infine dunque,
(iii) Accettiamo la descrizione linearizzata data dalle Piccole Oscillazioni.
114

A questo punto il conto non e difficile, potremo per esempio procedere cosı: consi-deriamo inizialmente le equazioni linearizzate del pendolo sferico rispetto ad un sistemainerziale, queste sono ben note
mx = −mg
lx, my = −mg
ly,
dove x e y sono coordinate cartesiane nel locale piano tangente (in O). Mettendo inevidenza le frequenze (coincidenti) di questo oscillatore armonico 2-dimensionale,
mx = −mω2x, my = −mω2y, ω2 :=g
l.
Teniamo conto ora della forza di Coriolis nella teoria linearizzata in costruzione. Questo none del tutto banale (anche se le formule a cui arriveremo saranno relativamente semplici).La formula che rappresenta la forza di Coriolis sopra scritta e a valori in R3, dovremoprima di tutto introdurre l’informazione che il sistema e vincolato sulla sfera di raggio l, epoi procedere nella linearizzazione. La velocita angolare terrestre si decompone nella base(O, x, y, z)
Ω = (Ωx, 0,Ωz), Ωz = |Ω|cosβ = |Ω|sinα.Teniamo presente che nell’emisfero boreale, in cui abbiamo posto O, si ha Ωz > 0; inoltre,per α ≈ 45o (circa la nostra latitudine) il suo ordine di grandezza e
Ωz ≈ 7, 26 · 10−5 1√2≈ 5, 13 · 10−5,
mentre l’ordine di grandezza di ω, per l ≈ 15 metri, e
ω ≈√
9, 8
15≈ 0, 8.
Tornando al nostro conto, la strategia e la seguente: scriviamo il lavoro della forza diCoriolis per arbitrari vettori tangenti (= “spostamenti virtuali”) alla superficie sferica,usando localmente, vicino ad O, coordinate lagrangiane x, y, otterremo un’espressione deltipo
dL = Qx(x, y, x, y)dx+Qy(x, y, x, y)dy,
le Qx e Qy sono le “Componenti Lagrangiane della Sollecitazione” e sono le forze ge-neralizzate che dobbiamo inserire nelle equazioni (non linearizzate) di Lagrange; ora, l’ul-timo passo consiste nel considerare solo i termini lineari di tali quantita a partire dall’equi-librio (e velocita nulle) (x, y; x, y) = (0, 0; 0, 0). L’immersione della sfera in R3, localmentein O, e data da (x, y) 7→ (x, y, z(x, y)), ove z(x, y) = l −
√l2 − x2 − y2, il generico vettore
tangente e dP = (dx, dy, dz(x, y)), e la componente z della velocita e rappresentata dadzdt = ∂z
∂x(x, y)x+ ∂z∂y (x, y)y. Dunque:
dL = −2mΩ ∧ vP · dP = det
dx dy dz(x, y)−2mΩx 0 −2mΩz
x y dzdt
,
115

riscrivendo,
dL = (2mΩz y)dx+ (−2mΩzx+ 2mΩxdz
dt)dy + (−2mΩxy)dz(x, y) =
= (2mΩz y − 2mΩxy∂z
∂x)dx+ [−2mΩzx− 2mΩxy
∂z
∂y+ 2mΩx(
∂z
∂xx+
∂z
∂yy)]dy.
Osservando che ∂z∂x(x, y) = x√
l2−x2−y2, ∂z∂y (x, y) = y√
l2−x2−y2, possiamo infine scrivere
dL = (2mΩz y + o(|(x, y, x, y)|)dx+ (−2mΩzx+ o(|(x, y, x, y)|)dy,
dove o(|v|) significa che lim|v|→0o(|v|)|v| = 0, cioe termini “d’ordine superiore”. Da quest’ul-
tima relazione individuiamo i termini che andranno ad aggiustare le equazioni del pendolosferico linearizzato (inerziale) che abbiamo scritto sopra; otteniamo:
mx = −mω2x+ 2mΩz y, my = −mω2y − 2mΩzx.
D’ora in poi il nostro lavoro consistera nello studio di tale sistema di equazioni differenzialilineari del secondo ordine in R2. Semplifichiamo la massa m, moltiplichiamo ambo i membridella seconda equazione per l’unita immaginaria i =
√−1 e sommiamo membro a membro
con la prima, posto ζ := x+ iy, otteniamo:
ζ + 2iΩz ζ + ω2ζ = 0.
I dati iniziali al tempo t = 0 (Problema di Cauchy) sono del tipo
x(0) = x0, y(0) = y0, x(0) = x0, y(0) = y0,
che si possono scrivere
ζ(0) = x0 + iy0, ζ(0) = x0 + iy0.
Dobbiamo preliminarmente determinare la struttura dello spazio vettoriale delle soluzionidell’equazione differenziale. Come al solito, si cerca una base per tale spazio tra le funzionidel tipo ζ(t) = eλt; inserendo nell’equazione differenziale otteniamo l’equazione caratteri-stica per λ:
λ2 + 2iΩzλ+ ω2 = 0,
le cui radici sono
λ1,2 = −iΩz ±√−Ωz
2 − ω2 = i(−Ωz ±√
Ωz2 + ω2).
La generica soluzione e data dalla combinazione complessa di eλ1t e eλ2t, ovvero,
ζ(t, c1, c2) = e−iΩzt(c1ei√
Ωz2+ω2t + c2e−i√
Ωz2+ω2t).
116

Notiamo a questo punto che la rappresentazione complessa del nostro sistema di equazionidifferenziali, si rivela molto utile, perche la formula generale per ζ(t, c1, c2) mette subito inchiaro la geometria delle soluzioni: il termine entro parentesi,
(c1ei√
Ωz2+ω2t + c2e−i√
Ωz2+ω2t),
rappresenta un’ellisse nel piano (O, x, y) ∼ C —vedi sotto— mentre il termine
e−iΩzt,
che e indipendente dai dati iniziali, rappresenta la precessione dei punti apsidali dell’ellissecon velocita angolare −Ωz < 0, dunque in senso orario.
Un esempio istruttivo e il seguente. Abbandoniamo il sistema dal punto (x(0), y(0)) =(x0, 0) con velocita nulla e calcoliamo la struttura dell’ellisse. Si ha:
ζ(0) = x0 + i0 = x0, ζ(0) = 0 + i0 = 0.
ζ(0, c1, c2) = c1 + c2 = x0,
ζ(0, c1, c2) = −iΩz(c1 + c2) + i
√Ωz
2 + ω2 (c1 − c2) = 0.
Otteniamo:
c1 =x0
2(1 +
Ωz√Ω2z + ω2
),
c2 =x0
2(1− Ωz√
Ω2z + ω2
).
Dunque la soluzione nel piano complesso e
ζ(t) = e−iΩzt[x0
2(1 +
Ωz√Ω2z + ω2
)ei√
Ωz2+ω2t +x0
2(1− Ωz√
Ω2z + ω2
)e−i√
Ωz2+ω2t];
utilizzando le formule di Euler, sinϑ = eiϑ−e−iϑ2i , cosϑ = eiϑ+e−iϑ
2 , si ha infine:
ζ(t) = e−iΩzt[x0 cos
√Ωz
2 + ω2t+ ix0Ωz√
Ωz2 + ω2
sin
√Ωz
2 + ω2t ].
Il semi-asse maggiore vale: a = x0,
il semi-asse minore vale: b = x0Ωz√Ωz2+ω2
.
Nel caso x0 = 1 metro, b ≈ 5,13·10−5√(5,13·10−5)2+0,82
≈ 5,13·10−5
0,8 ≈ 6, 4·10−5 metri, si noti che e una
ellisse “molto stretta”, ed e per questo che spesso si parla, impropriamente, di precessionedel “piano di oscillazione”.
117

L’angolo di precessione (in gradi), nell’intervallo di tempo di un’ora, vale: φ = Ωz ·3600 · 360
6,28 ≈ 5, 13 · 10−5 · 3, 6 · 103 · 3606,28 ≈ 10, 40.
—————————————
Verifichiamo che la curva
R 3 t 7→ z(t) = c1eiωt + c2e
−iωt ∈ C, c1 = ρ1eiα1 , c2 = ρ2e
iα2 ,
ha per immagine un’ellisse di semi-asse maggiore a := ρ1 + ρ2 e di di semi-asse minoreb := |ρ1 − ρ2| con l’asse maggiore ruotato in senso antiorario rispetto all’asse x (partereale) dell’angolo α1+α2
2 , e che se ρ1 − ρ2 > 0 [< 0] l’ellisse e percorsa in senso antiorario[orario].
Prova. Si haz(t) = c1e
iωt + c2e−iωt ∈ C,
z(t) = eiα1+α2
2 (ρ1ei(ωt+
α1−α22
) + ρ2e−i(ωt+α1−α2
2));
dunque, posto
ϑ := ωt+α1 − α2
2
e usando le formule di Euler,
z(ϑ) = eiα1+α2
2 ((ρ1 + ρ2) cosϑ+ i(ρ1 − ρ2) sinϑ);
La quantita entro parentesi si riscrive
X + iY = a cosϑ+ isgn(ρ1 − ρ2)b sinϑ,
ove X e Y forniscono le ben note equazioni parametriche dell’ellisse, dato che soddisfanoall’equazione: (X
a
)2+(Yb
)2= 1.
118

Capitolo 7
Meccanica Elementare del CorpoRigido
7.1 Il Corpo Rigido e un sistema vincolato a vincoli olonomi
Consideriamo il sistema di n particelle, di massa m1, ...,mn, soggette geometricamente alvincolo di rigidita, cioe, il sottoinsieme delle configurazioni possibili per le n particelle edato dalle n-uple di 3-vettori (x1, ..., xi, ..., xn) ∈ R3n tali che
|xi − xj | = cij , i < j = 1, ..., n, | · |:= norma euclidea in R3,
per n(n−1)2 costanti positive cij (= cji, e, ovviamente, cii=0). Chiaramente tale vincolo e di
natura olonoma (coinvolge configurazioni, ma non velocita). Sia C∗ = (x∗1, ..., x∗i , ..., x
∗n) una
configurazione ammissibile. Vogliamo indagare sul sottoinsieme connesso S delle soluzionidella relazione sopra scritta contenente C∗. Ogni altra configurazione C in tale insieme econnessa a C∗ mediante qualche curva continua
[0, 1] 3 λ 7→ C(λ) ∈ R3n, C(0) = C∗, C(1) = C.
Fissate C∗ e C, indichiamo con f la mappa di R3 in R3 tale che (i)
(f(x∗1), ..., f(x∗n)) = (x1, ..., xn),
cioe manda C∗ in C, ed inoltre (ii) per ogni coppia di punti x∗, y∗ di R3, siano o meno inC∗,
|f(x∗)− f(y∗)| = |x∗ − y∗|,
cioe, e un’isometria, piu precisamente f e un’estensione isometrica della mappa che mandaC∗ in C. Un generale teorema di geometria (si veda per esempio De Marco, AnalisiDue/uno, pag. 117) ci permette di affermare che f , isometrica, e affine. Se le particelle
119

sono almeno tre, non allineate, allora tale mappa f e univocamente determinata da unacoppia in R3×SO(3). Infatti, scrivendo ora f affine, f(x) = Ax+b, dove A e una matrice eb e un vettore, si ha che |f(x2)−f(x1)|2 = |x2−x1|2 implica che (ATA(x2−x1), (x2−x1)) =((x2 − x1), (x2 − x1)) per ogni x2 − x1 ∈ R3, dunque: A ∈ O(3), gruppo ortogonale; e datoche le nostre configurazioni C sono connesse alla configurazione C∗, dunque le A sonoconnensse all’identita I, det I = +1, segue che A ∈ SO(3).
L’insieme S e dunque isomorficamente identificato da
R3 × SO(3) : traslazioni, rotazioni proprie,
che e la varieta delle configurazioni del sistema meccanico vincolato olonomo detto corporigido. La dimensione di R3 × SO(3) e sei: questi sono dunque i gradi di liberta del corporigido. Per quanto riguarda la dimensione di SO(3), la relazione RTR = I puo essere pen-sata come a sei equazioni funzionalmente indipendenti (sono sei perche tali relazioni sonosimmetriche) implicitamente definenti SO(3) nello spazio nove-dimensionale delle matricireali tre per tre; dunque, nove meno sei: tre. Una carta locale famosa per SO(3) e datadagli angoli (tre, naturalmente) di Euler; il lettore e invitato a familiarizzare con tale cartalocale in qualche classico manuale di Meccanica.
7.2 Il Corpo Rigido e un sistema vincolato a vincoli lisci
Vogliamo introdurre nella teoria che stiamo sviluppando delle ipotesi (matematiche, mafortemente suggerite dalla fisica) sulla classe Υ delle reazioni vincolari esplicabili da talevincolo di rigidita:
Le reazioni vincolari esplicabili sono date da tutte e sole le distribuzioni di forze di tipointerno d’interazione di coppia soddisfacenti al Principio di Azione e Reazione (Risultantee Momento risultante nulli).
Indichiamo con φij il generico 3-vettore (forza) reazione vincolare agente sulla particellai-esima dovuta alla presenza della particella j-esima. Indicheremo con
Φi =n∑
j(6=i)=1
φij
la reazione vincolare risultante sulla particella i-esima.
Diremo che (Φ1, ...,Φn) e una possibile distribuzione di reazioni vincolari se e solo se ∀i 6= j(Principio di Azione e Reazione):
(∗) φij + φji = 0, (xi − xj) ∧ φij = 0,
Calcoliamo il lavoro virtuale della generica distribuzione vincolare Φ = (Φ1, ...,Φn) a partireda una configurazione (OΩ, R) ∈ R3×SO(3) dove O e l’origine di un sistema di riferimento
120

e Ω e un punto del (oppure, solidale al) rigido.
δLΦ =
n∑i=1
Φi · δPi =
n∑i=1
Φi · (δΩ + δψ ∧ ΩPi),
ove con (δΩ, δψ) si intende il generico vettore tangente (o spostamento virtuale) a R3 ×SO(3) in una configurazione (OΩ, R):
(δΩ, δψ) ∈ R3×R3 ∼ T(OΩ,R)(R3×SO(3)), in altri termini, δΩ e il generico (in R3) vettorespostamento di Ω, mentre δψ rappresenta il generico (in R3) vettore velocita angolare delrigido; a volte i δψ si dicono vettori infinitesimi di rotazione. Si verifica che
δLΦ = (n∑i=1
Φi) · δΩ + (n∑i=1
ΩPi ∧ Φi) · δψ = 0,
poiche, dalle ipotesi (∗) sulle forze di reazione vincolare sopra fatte, segue che
n∑i=1
Φi = 0,n∑i=1
ΩPi ∧ Φi = 0.
(Verificarlo per esercizio). Dunque, il vincolo di rigidita e liscio.
7.3 Dinamica del Corpo Rigido
Mostriamo che per il corpo rigido libero il Principio di D’Alembert, che sussiste datoche il corpo rigido e liscio, e equivalente alle Equazioni Cardinali. In effetti, un motot 7→ xi(t), i = 1, ..., n e dinamicamente possibile se e solo se, per ogni δx appartenente allospazio locale tangente alla varieta vincolare corpo rigido nel punto x(t), vale
n∑i=1
(mixi(t)− Fi(t, x(t), x(t)) · δxi = 0,
dove le Fi sono le forze attive. Piu in dettaglio, e usando la proprieta di permutazioneciclica del prodotto misto: a · b ∧ c = c · a ∧ b = b · c ∧ a,
n∑i=1
(mixi(t)− Fi(t, ..., xj(t), ..., xk(t), ...)) · (δΩ + δψ ∧ ΩPi) =
=n∑i=1
(mixi − Fi) · δΩ +( ddt
n∑i=1
ΩPi ∧mixi −n∑i=1
d
dtΩPi ∧mixi −
n∑i=1
ΩPi ∧ Fi)· δψ =
121

= (d
dt
n∑i=1
mixi−n∑i=1
Fi)·δΩ+( ddt
n∑i=1
ΩPi∧mixi−n∑i=1
(xi−xΩ)∧mixi−n∑i=1
ΩPi∧Fi)·δψ =
= (d
dt
n∑i=1
mixi −n∑i=1
Fi) · δΩ +( ddt
n∑i=1
ΩPi ∧mixi + xΩ ∧ (n∑i=1
mi)xG −n∑i=1
ΩPi ∧ Fi)· δψ,
osservando che δΩ e δψ sono entrambi completamente arbitrari in R3, la condizione va-riazionale data dal Pr. di D’Alembert per il corpo rigido e equivalente alle EquazioniCardinali:
d
dt
n∑i=1
mixi =
n∑i=1
Fi,
d
dt
n∑i=1
ΩPi ∧mixi =n∑i=1
ΩPi ∧ Fi − xΩ ∧ (n∑i=1
mi)xG.
Il primo gruppo di Equazioni Cardinali pilota l’evoluzione del centro di massa del corporigido, mxG =
∑i Fi.
Il dettaglio del secondo gruppo delle Equazioni Cardinali, rispetto ad un riferimento solidaleal corpo rigido, conduce alle Equazioni di Euler.
7.4 Equazioni di Euler
Per il corpo rigido, come per un qualsiasi sistema ad n corpi, vale dunque l’equazionecardinale (vedi l’ultima formula sopra)
d
dtMΩ = N
(ext)Ω − vΩ ∧mtotvG
ove, nel nostro caso, N(ext)Ω e la risultante dei momenti delle sole forze esterne attive; se ci
limitiamo al caso Ω ≡ G, diventa
d
dtMG = N
(ext)G .
Il nostro corpo rigido in studio e libero. Il suo baricentro si muovera come un corpo dimassa mtot soggetto alla risultante delle forze agenti sul sistema. In tale situazione, econveniente introdurre, accanto al sistema di riferimento inerziale (O, c1, c2, c3), un sistemadi riferimento (non inerziale) (G, J1(t), J2(t), J3(t)) mobile e solidale al corpo, rispetto alquale l’Operatore d’Inerzia, assume una struttura matriciale IG di forma diagonale (diremoche e un sistema principale d’Inerzia):
IG =
I1 0 00 I2 00 0 I3
, Ii > 0.
122

L’esistenza dei sistemi principali d’Inerzia e sempre garantita dalla proprieta algebricaseguente: fissato il punto Ω, l’operatore d’Inerzia e autoaggiunto, simmetrico, rispetto allametrica euclidea, dunque esiste sempre una base in cui la sua rappresentazione matricialee diagonale e gli elementi diagonali sono esattamente gli autovalori dell’operatore stesso,che sono positivi, dato che l’operatore d’Inerzia individua una forma quadratica definitapositiva. Sotto le ipotesi introdotte, valgono le relazioni
MG =∑i
GPi ∧mivi =∑i
GPi ∧mi(vG + ω ∧GPi) =∑i
miGPi ∧ (ω ∧GPi) = IGω,
quest’ultima e esattamente la definizione di operatore d’Inerzia, inoltre per l’energia cine-tica vale1:
T =1
2m|vG|2 + T (G) =
1
2m|vG|2 +
1
2(IGω, ω)
(m :=
∑i
mi
)Esprimiamo ora l’equazione scritta sopra nel sistema rigido solidale al corpo
MG =∑i
MiJ i = IGω =∑i
IiωiJ i
(ω =
∑i
ωiJ i
)
d
dtMG =
d
dt
(∑i
Iiωi(t)J i(t)
)=∑i
IiωiJ i +∑i
IiωidJ idt
=
=∑i
IiωiJ i +∑i
Iiωi ω ∧ J i =
=∑i
IiωiJ i + ω ∧ (∑i
IiωiJ i) =∑i
IiωiJ i + ω ∧MG = N(ext)G .
Riscrivendo,d
dtIGω = IGω + ω ∧ IGω = N
(ext)G , (#)
ove si e posto ω :=∑
i ωi(t)J i(t). Per esercizio, si provi a dedurre le equazione (#) in ungenerico sistema solidale al corpo rigido, non necessariamente principale d’inerzia.
In assenza di forze attive esterne, ovviamente, N(ext)G = 0, ma quest’ultima relazione
vale anche in situazioni meno banali, p.e. in presenza dell’azione delle forza gravitazionale
(nell’approssimazione usuale di superficie terrestre), infatti si ha: N(ext)G = N
(g)G =
=
∫Y ∈S
GP ∧ µ(Y )gd3Y =
(∫Y ∈S
µ(Y )GPd3Y
)∧ g = mtotGG ∧ g = 0.
1ω si intende espressa nel sistema rigido solidale al corpo.
123

In tali casi dunque otteniamo l’equazione vettoriale
IGω + ω ∧ IGω = 0, cioe∑i
IiωiJ i +∑j
ωjJ j ∧∑i
IiωiJ i = 0,
da cui, svolgendo il prodotto vettoriale, si ottengono le tre equazioni scalari:J1 : I1ω1 − (I2 − I3)ω2ω3 = 0J2 : I2ω2 − (I3 − I1)ω3ω1 = 0 (equazioni di Euler)J3 : I3ω3 − (I1 − I2)ω1ω2 = 0
Si tratta di un sistema di equazioni differenziali del primo ordine nelle ωi. Una voltadeterminata la soluzione ω(t) di un problema di Cauchy ω(0) = ω0, si studia il sistema diequazioni differenziali lineare a coefficienti variabili (in t), le relazioni di Poisson:
dJ i(t)
dt= ω(t) ∧ J i(t),
infine, t 7→ J i(t), i = 1, 2, 3, da l’evoluzione rispetto ad un sistema inerziale esterno delcorpo rigido in studio.
Osserviamo che se la velocita angolare e costante nel corpo, cioe se le ωi sono costanti,allora ω e costante nello spazio, cioe ω(t) =
∑i ωiJi(t) e costante. Infatti:
dω
dt=
d
dt(∑i
ωiJ i) =∑i
ωiJ i + ω ∧ ω =∑i
ωiJ i =: ω.
Da questo fatto segue che per trovare le soluzioni stazionarie (moti rigidi con velocitaangolare costante) nel sistema assoluto possiamo studiare le soluzioni stazionarie ω(t) ≡(ω1, ω2, ω3) = ω∗ nel sistema solidale, cioe gli equilibri delle equazioni di Euler.
Sia ora ω0 = (ω01, ω
02, ω
03) un equilibrio delle equazioni di Euler, cioe una velocita an-
golare costante ω(t) ≡ ω0 soluzione di tali equazioni. Dall’equazione di Euler in formavettoriale IGω + ω ∧ IGω = 0, segue che
ω0 ∧ IGω0 = 0 =⇒ IGω0 = λω0.
Quindi ω0 puo essere una soluzione stazionaria se e solo se ω0 e un autovettore di IG, cioese rappresenta una rotazione attorno ad un asse principale d’inerzia. Percio le soluzioni
stazionarie sono collezionabili in tre famiglie ω(1)0 = (ω, 0, 0), ω
(2)0 = (0, ω, 0), ω
(3)0 =
(0, 0, ω), con ω arbitrario in R.
Importanti informazioni qualitative sul sistema possiamo trarle dall’esistenza di even-tuali integrali primi. Dall’equazione
dMGdt = 0, traiamo che le tre componenti del momento
124

angolare nello spazio si conservano; queste tre componenti pero non rappresentano tre in-tegrali primi per le equazioni di Euler; evidentemente, le tre componenti di MG evolvononel corpo, resta pero sicuramente costante la norma quadrato |MG|2,
MG =3∑i=1
IiωiJ i = cost.⇒ |MG|2 =3∑i=1
I2i ω
2i = cost.
Un altro integrale primo e dato dall’energia totale:
E = T + Ug =1
2mtot|vG|2 +
1
2(IGω, ω) + Ug = cost, Ug = mtot g zG.
E facile verificare che 12mtot|vG|2 +Ug e integrale primo per il primo gruppo delle equazioni
cardinali, dunque
TG =1
2(IGω, ω) =
1
2
3∑i=1
Iiω2i
e un ulteriore integrale primo, che, d’altro canto, era possibile dedurlo verificandolo diret-tamente con il solo uso delle equazioni di Euler, senza le considerazioni energetiche globaliappena fatte sul sistema meccanico. I due integrali primi “importanti” del sistema sonoquindi:
|MG|2 =
3∑i=1
M2i = M2 ≥ 0,
TG =1
2
3∑i=1
Iiω2i =
1
2
3∑i=1
(Iiωi)2
Ii=
3∑i=1
(Mi√2Ii
)2
= e ≥ 0,
dove con Mi si sono indicate le componenti di MG nel sistema solidale al rigido, MG =∑iMiJ i .I moti del sistema si svolgono su superfici di livello di |MG|2 e TG, lungo i moti queste
due quantita mantengono un valore costante. Una volta assegnate delle condizioni iniziali,quindi una volta fissati M2 ed e, il sistema evolve lungo l’intersezione di due superficibidimensionali in R3, sui cui assi rappresentiamo le componenti del momento MG cioelungo una varieta unidimensionale
3∑i=1
M2i = M2 sfera del momento angolare
3∑i=1
(Mi√2eIi
)2
= 1 ellissoide dell’energia ( 6= dall’ellissoide d’inerzia)
Si osserva che i tre assi dell’ellissoide sono in generale diversi. Cerchiamo ora di studiare dalpunto di vista qualitativo la forma delle traiettorie del sistema nello spazio (M1,M2,M3).
125
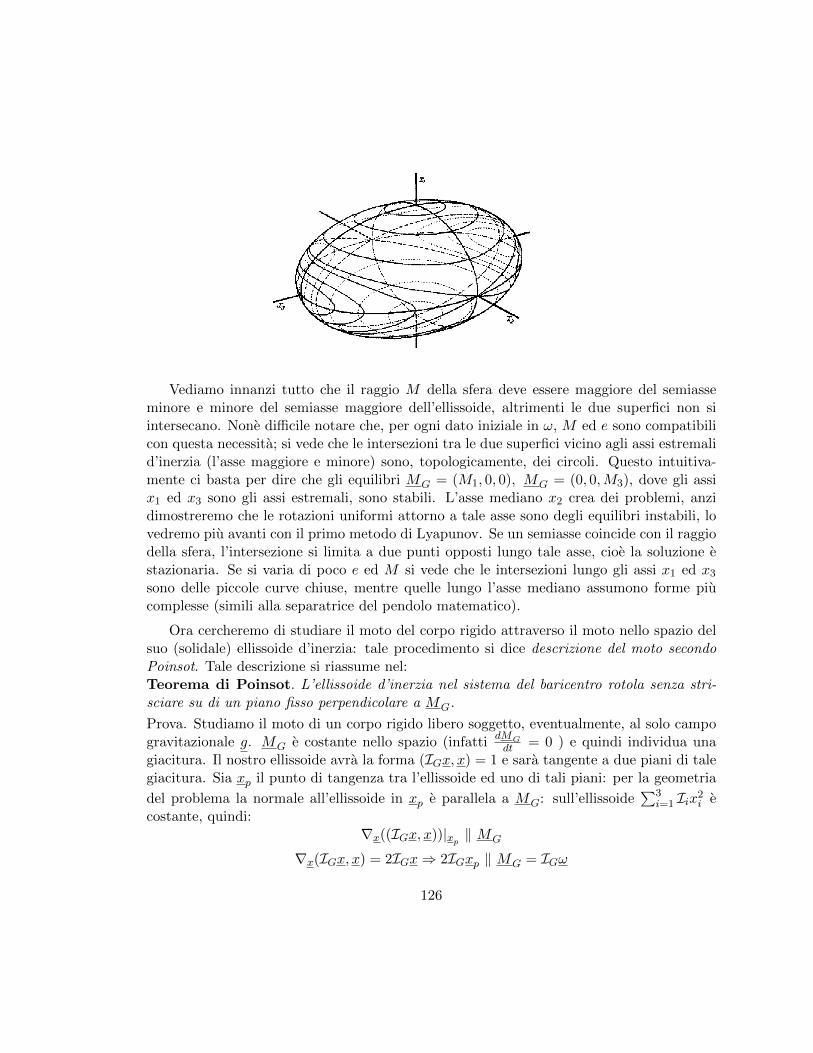
Vediamo innanzi tutto che il raggio M della sfera deve essere maggiore del semiasseminore e minore del semiasse maggiore dell’ellissoide, altrimenti le due superfici non siintersecano. None difficile notare che, per ogni dato iniziale in ω, M ed e sono compatibilicon questa necessita; si vede che le intersezioni tra le due superfici vicino agli assi estremalid’inerzia (l’asse maggiore e minore) sono, topologicamente, dei circoli. Questo intuitiva-mente ci basta per dire che gli equilibri MG = (M1, 0, 0), MG = (0, 0,M3), dove gli assix1 ed x3 sono gli assi estremali, sono stabili. L’asse mediano x2 crea dei problemi, anzidimostreremo che le rotazioni uniformi attorno a tale asse sono degli equilibri instabili, lovedremo piu avanti con il primo metodo di Lyapunov. Se un semiasse coincide con il raggiodella sfera, l’intersezione si limita a due punti opposti lungo tale asse, cioe la soluzione estazionaria. Se si varia di poco e ed M si vede che le intersezioni lungo gli assi x1 ed x3
sono delle piccole curve chiuse, mentre quelle lungo l’asse mediano assumono forme piucomplesse (simili alla separatrice del pendolo matematico).
Ora cercheremo di studiare il moto del corpo rigido attraverso il moto nello spazio delsuo (solidale) ellissoide d’inerzia: tale procedimento si dice descrizione del moto secondoPoinsot. Tale descrizione si riassume nel:Teorema di Poinsot. L’ellissoide d’inerzia nel sistema del baricentro rotola senza stri-sciare su di un piano fisso perpendicolare a MG.
Prova. Studiamo il moto di un corpo rigido libero soggetto, eventualmente, al solo campogravitazionale g. MG e costante nello spazio (infatti
dMGdt = 0 ) e quindi individua una
giacitura. Il nostro ellissoide avra la forma (IGx, x) = 1 e sara tangente a due piani di talegiacitura. Sia xp il punto di tangenza tra l’ellissoide ed uno di tali piani: per la geometria
del problema la normale all’ellissoide in xp e parallela a MG: sull’ellissoide∑3
i=1 Iix2i e
costante, quindi:∇x((IGx, x))|xp ‖ MG
∇x(IGx, x) = 2IGx⇒ 2IGxp ‖ MG = IGω
126

da cui si trae xp‖ω ⇒ xp = Kω, per un K che ora calcoliamo,
(IGxp, xp) = 112(IGω, ω) = e
K2 =1
2e⇒ K =
1√2e
xp =ω√2e
Valutiamo la proiezione di xp sulla normale al piano:
xp ·MG
|MG|= componente di xp lungo la direzione di MG =
ω√2e· IGω|MG|
=IGω · ω√2e|MG|
=
√2e
|MG|Dalle relazioni trovate deduciamo che il punto di tangenza tra piano ed ellissoide giacesull’asse istantaneo di rotazione dell’ellissoide, cioe l’ellissoide ruota senza strisciare su talepiano, e che la distanza del piano da G e costante, cioe il piano e fisso nello spazio (nelsistema relativo del baricentro, in generale mobile).
Studiando il moto di un corpo rigido libero con N(ext)G = 0 , nel sistema del baricentro G,
si sono trovate le equazioni di Euler (A = I1 , B = I2 , C = I3):
Aω1 − (B − C)ω2ω3 = 0Bω2 − (C −A)ω3ω1 = 0Cω3 − (A−B)ω1ω2 = 0
che possiamo pensare come ad un sistema differenziale del tipo
x = X(x) X : R3 → R3
Le ωi sono le componenti della velocita angolare del corpo espressa rispetto a una ternaprincipale d’inerzia solidale al corpo. Abbiamo visto che gli equilibri del sistema sono tuttie soli della forma (ω0
1, 0, 0), (0, ω02, 0) e (0, 0, ω0
3). Vogliamo studiare la stabilita di taliequilibri, nello spazio R3 delle velocita angolari, nel caso I1 > I2 > I3, A > B > C.Dimostreremo che le rotazioni attorno agli assi estremali x e z sono stabili: lo faremo soloper le rotazioni attorno all’asse maggiore d’inerzia, l’asse x. Il vettore ω∗ = (ω0
1, 0, 0),comunque fissato ω0
1 in R3, e un equilibrio dell’equazione differenziale scritta sopra, infattie X(ω∗) = 0. Dimostreremo che e stabile usando la seguente funzione di Lyapunov:
W (ω) := (T (ω)− T0)2 − |MG|2 + 2AT (ω),
ove T0 = 12A(ω0
1)2
e T (ω) = 12(Aω2
1 +Bω22 + Cω2
3).
W (ω) = (T (ω)− T0)2 −A2ω21 −B2ω2
2 − Cω23 +A2ω2
1 +ABω22 +ACω2
3 =
127

= (T (ω)− T0)2 +B (A−B)︸ ︷︷ ︸>0
ω22 + C (A− C)︸ ︷︷ ︸
>0
ω23
Pertanto: W (ω) ≥ 0, ∀ω. Ci chiediamo se W , localmente a ω∗, sia strettamentedefinita positiva. In altri termini, per qualche ω 6= ω∗, puo essere che W (ω) = 0?
W (ω) = 0 ⇒ ω2 = 0 ω3 = 0 oltre a T (ω) = T0 ⇒ 12Aω
21 = 1
2A(ω01)
2 ⇐⇒ ω1 = ±ω01,
quindi W (ω) e localmente definita positiva attorno a (ω01, 0, 0). Inoltre W = f(T, |MG|) ⇒
W = ∂f∂T
ddtT + ∂f
∂|MG|ddt |MG| = 0. Allora W e funzione di Lyapunov per l’equilibrio
(ω(0)1 , 0, 0).
Un analogo risultato di stabilita si ottiene per le rotazioni uniformi ω∗ = (0, 0, ω(0)3 )
attorno all’asse principale d’inerzia di momento d’inerzia minore I3 = C, A > B > C: siverifica che ora una funzione di Lyapunov e
W (ω) := (T (ω)− T0)2 + |MG|2 − 2CT (ω).
Verifichiamo infine che le rotazioni uniformi ω∗ = (0, ω(0)2 , 0) attorno all’asse mediano
di momento d’inerzia I2 = B, A > B > C, sono instabili. La matrice associata al sistemalinearizzato di Euler
ω1 = B−CA ω2ω3
ω2 = C−AB ω3ω1
ω3 = A−BC ω1ω2
attorno a tale equilibrio ω∗ = (0, ω(0)2 , 0) risulta essere:
A = X ′(ω∗) =
0 0 B−CA ω
(0)2
0 0 0A−BC ω
(0)2 0 0
.
0 = det(A− λI) = det
−λ 0 B−CA ω
(0)2
0 −λ 0A−BC ω
(0)2 0 −λ
=
= −λ(λ2 − (A−B)(B − C)
AC(ω
(0)2 )2
),
λ1 = 0, λ2,3 = ±√
(A−B)(B − C)
AC|ω(0)
2 |,
si noti che il radicando e positivo; esiste un autovalore reale positivo: c’e instabilita per ilprimo metodo di Lyapunov.
128

La risoluzione in tutta generalita delle equazioni di Euler rende necessario l’uso diparticolari funzioni speciali: le Funzioni Ellittiche di Jacobi.
Qui le risolveremo in un caso particolare, limitandoci a studiare il moto di un giroscopio,ossia di un corpo in cui i momenti principali d’inerzia rispetto al baricentro sono del tipoI1 = I2 6= I3 (A = B 6= C). In tal caso le equazioni di Euler si scrivono:
ω1 = A−CA ω2ω3
ω2 = −A−CA ω3ω1
ω3 = 0
ω3 = cost. = ω(0)3
ω1 = A−CA ω
(0)3 ω2
ω2 = −A−CA ω
(0)3 ω1
Se poniamo K := (A−C)A ω
(0)3 > 0 le equazioni rimaste si scrivono
ω1 = Kω2
ω2 = −Kω1
Sia z := ω1 + iω2 la nostra nuova variabile
z = ω1 + iω2 = Kω2 − iKω1 = K(ω2 − iω1) = −iKz, ⇒
z = −iKz ⇒ z = C · eλt ove
C = z(0) = ω
(0)1 + iω
(0)2
λ = −iK
Quindi, mentre ω3(t) ≡ ω(0)3 , le velocita angolari descrivono dei moti armonici di pulsazione
K. Si dice che il corpo effettua una precessione attorno all’asse z, cioe che il vettore ω(t),considerato applicato al baricentro, descrive un moto circolare uniforme con il suo estremoattorno all’asse z. Il moto del corpo rigido giroscopico e quindi detto di precessione, doveil significato di precessione e qui sotto precisato.
Precessione. Un moto di un corpo rigido si dice di precessione se esistono due assi, l’assedi precessione p nello spazio e l’asse di figura f nel corpo, tali che lungo il moto l’angolofra di essi e costante e la velocita angolare istantanea giace nel piano da essi individuato;cioe, se lungo i moti:
p · f ≡ cost. ω(t) = α(t)p+ β(t)f α, β ∈ R
Se α(t) ≡ α ∈ R e β(t) ≡ β ∈ R , la precessione si dice regolare.
Dimostriamo che i moti del giroscopio sono delle precessioni regolari.
Se si scelgonop =
MG|MG|
f = J3
si ha:
p · f =MG · J3
|MG|=IGω · J3
|MG|=
(∑3
i=1 IiωiJ i) · J3
|MG|=Cω
(0)3
|MG|= cost.
129
MG = |MG|p = IGω = A (ω1J1 + ω2J2)︸ ︷︷ ︸=ω−ω(0)
3 J3
+Cω(0)3 J3
Aω −Aω(0)3 J3 + Cω
(0)3 J3 = |MG|p
ω =|MG|A
p+A− CA
ω(0)3 f .
130
Capitolo 8
Calcolo delle Variazioni
8.1 Principio Variazionale di Hamilton
Sia Q una varieta vincolare N -dimensionale e, per semplicita, siano q0 e q1 due sue confi-gurazioni nel dominio di definizione di un’unica carta locale. Identificheremo dunque, finoa diverso avviso, la varieta vincolare Q con RN ; analogamente, la varieta fibrato tangente 1
TQ =⋃q∈Q TqQ, che ha come sostegno insiemistico l’unione di tutti gli spazi tangenti,
sara identificata con R2N . Consideriamo, inizialmente, l’insieme delle curve di classe C2,definite nell’intervallo [t0, t1], a valori in RN , tra due configurazioni prefissate,
Γq0,q1t0,t1= q(·) ∈ C2([t0, t1];RN ) : q(t0) = q0, q(t1) = q1.
Questo sottoinsieme Γq0,q1t0,t1di C2([t0, t1];RN ) non e linearmente chiuso; e invece linearmente
chiuso, ha struttura di R-spazio, il seguente sottoinsieme
Γ0,0t0,t1
= q(·) ∈ C2([t0, t1];RN ) : q(t0) = 0, q(t1) = 0.
Tale spazio e talvolta detto spazio direttore poiche, scelta una curva q(·) ∈ Γq0,q1t0,t1, si genera
tutto Γq0,q1t0,t1, che risulta chiaramente uno spazio affine:
Γq0,q1t0,t1= q(·) + Γ0,0
t0,t1.
Da un punto di vista prettamente geometrico Γ0,0t0,t1
si atteggia pure a spazio tangente aΓq0,q1t0,t1
nel generico punto q(·); infatti, pensiamo alla costruzione dei vettori tangenti comederivate (‘velocita’) di curve che passano per q(·) e a valori in Γq0,q1t0,t1
: tali curve sono deltipo
[−ε,+ε]× [t0, t1] 3 (λ, t) 7→ γ(λ, t) ∈ RN , γ(0, ·) = q(·);
1lo ‘spazio delle fasi’, piu propriamente, nel linguaggio italiano di Levi Civita, ‘spazio degli atti di moto’.
131

dunque, per ogni λ ∈ [−ε,+ε], γ(λ, t0) = q(t0), γ(λ, t1) = q(t1), cosicche la curvavettore tangente,
h(·) :=d
dλγ(λ, ·)|λ=0,
valutata in t0 e in t1, e il vettore nullo. Quindi h(·) ∈ Γ0,0t0,t1
.
Sia assegnata una funzione Lagrangiana di classe C2
L : TQ× R→ R, (q, q, t) 7→ L(q, q, t).
Si noti che L a questo stadio e estremamente generale, quindi di tipo non necessariamentemeccanico L = T − V , energia cinetica ‘meno’ energia potenziale. Mediante L costruiamoil seguente funzionale reale J , detto funzionale d’Azione,
J : Γq0,q1t0,t1−→ R
q(·) 7→ J [q(·)] :=
∫ t1
t0
L(q(t), q(t), t)dt.
Si chiama variazione di J , costruita a partire dal punto (curva) q(·) ∈ Γq0,q1t0,t1, e di incremento
h(·) ∈ Γ0,0t0,t1
, la seguente derivata direzionale o di Gateaux, nella direzione del vettore h(·):
dJ [q(·)]h(·) :=d
dλJ [q(·) + λh(·)]|λ=0.
Diremo infine che il punto q(·) ∈ Γq0,q1t0,t1rende stazionario J se
dJ [q(·)]h(·) = 0, ∀h(·) ∈ Γ0,0t0,t1
.
Il seguente teorema caratterizza le soluzioni delle equazioni di Lagrange di Lagrangia-na L tra le configurazioni q0 e q1 e nell’intervallo di tempo [t0, t1]. In ambito analitico-variazionale le equazioni di Lagrange sono spesso citate come equazioni di Euler-Lagrange.
Teorema - Principio Variazionale di Hamilton in C2: La curva q(·) ∈ Γq0,q1t0,t1ren-
de stazionario il funzionale J se e solo se q(·) risolve le equazioni di Euler-Lagrange diLagrangiana L.
Prova. Si tratta di esplicitare dJ [q(·)]h(·) –c’e la sommatoria, sottintesa, per i = 1, ..., N–
dJ [q(·)]h(·) = ddλ
∫ t1t0L(q(t) + λh(t), q(t) + λh(t), t)dt|λ=0 =
=∫ t1t0
[ ∂∂qiL(q(t), q(t), t)hi(t) + ∂
∂qiL(q(t), q(t), t)hi(t)]dt =
= [ ∂∂qiL(q(t), q(t), t)hi(t)]|t1t0 −
∫ t1t0
[ ddt∂L∂qi− ∂L
∂qi](t)hi(t)dt,
132

il primo termine e nullo per la proprieta caratteristica di Γ0,0t0,t1
, dunque:
dJ [q(·)]h(·) = −∫ t1
t0
[d
dt
∂L
∂qi− ∂L
∂qi
](t)hi(t)dt
Se la curva q(·) risolve le equazioni di Lagrange allora tutte le N funzioni C0 del tem-po [ ddt
∂L∂qi− ∂L
∂qi](t) sono identicamente nulle in [t0, t1] e dunque q(·) rende stazionario J .
Viceversa, q(·) renda stazionario J , cioe,∫ t1
t0
[d
dt
∂L
∂qi− ∂L
∂qi
](t)hi(t)dt = 0, ∀h(·) ∈ Γ0,0
t0,t1.
Supponiamo, ragionando per assurdo, che q(·) non soddisfi alle equazioni di Lagrange in[t0, t1], quindi, negando la tesi, per qualche indice i′ e a qualche istante t∗, supponiamo che[
d
dt
∂L
∂qi′− ∂L
∂qi′
](t∗) 6= 0.
Dato che L e q(·) sono di classe C2, le funzioni [ ddt∂L∂qi− ∂L
∂qi](t) sono, come gia appena
richiamato, continue in t, ed esiste –teorema della permanenza del segno– un intervallo[α, β], che contiene internamente t∗, in cui [ ddt
∂L∂qi′− ∂L
∂qi′](t) assume lo stesso segno di
[ ddt∂L∂qi′− ∂L
∂qi′](t∗). Scegliamo ora una particolare h(·) ∈ Γ0,0
t0,t1:
hi(t) :
hi(t) ≡ 0, i 6= i′,
hi′(t) ≡ 0, t ∈ [t0, t1] \ [α, β],
hi′(t) 6= 0, t ∈ [α, β], per esempio: hi
′(t) = (t− α)3(β − t)3
Si osservi che l’esponente ‘3’ qui sopra e scelto affinche h(·) sia effettivamente di classeC2 in [t0, t1]. Con tale scelta di h(·) otteniamo –qui non c’e naturalmente la sommatoriasottintesa sull’indice i′–
dJ [q(·)]h(·) =
∫ β
α
[d
dt
∂L
∂qi′− ∂L
∂qi′
](t)hi
′(t)dt 6= 0,
contro l’ipotesi: assurdo; quindi q(·) risolve le equazioni di Lagrange in [t0, t1].
Emergono dalla trattazione appena richiamata delle osservazioni e delle domande:
(i) Perche operare fin dall’inizio in una classe C2 di curve?Per scrivere il funzionale J basterebbe p.e. una classe di curve C1, se non meno. E’ quichiaro infatti che la classe C2 e legata alla possibilita di poter realizzare quell’‘integrazione
133

per parti’ che porta all’espresssione di dJ coinvolgente i primi membri delle equazioni diLagrange. Un tentativo dunque di riduzione, in un senso naturale, della regolarita dellecurve appare ragionevole e doveroso, e lo metteremo in atto, in W 1,2 = H1, in un modosufficientemente semplice nella Sezione 8.3.
(ii) La definizione di ‘stazionarieta’ del funzionale J : e veramente ragionevole introdurrequesta nozione fondata sulla semplice derivata direzionale?A differenza del precedente punto (i), possiamo invece qui sottolineare la ragionevolezzadi tale scelta: un’introduzione, apparentemente piu naturale, di stazionarizzazione fondatasulla nozione standard di derivata (di Frechet) richiede infatti la scelta di una norma inΓq0,q1t0,t1
. Ma questa induce una metrica, e dunque una topologia nello spazio delle curve, e, nelcaso infinito-dimensionale in studio, norme diverse inducono in genere topologie diverse.Sara la nozione successiva, di qualita di una curva stazionaria per J (localmente minimo,massimo, sella,...) che richiedera inevitabilmente una topologia; ma il nostro originaleproblema non necessita affatto di topologie: l’equivalenza della stazionarizzazione, dellacriticita di J , con le equazioni di Lagrange e perfettamente ben calibrata dalla scelta dellasemplice derivata di Gateaux.
(iii) La classe dei sistemi meccanici la cui dinamica si pone in forma variazionale e stretta-mente piu ampia della classe dei sistemi meccanici olonomi lisci e conservativi. Si consideriper esempio una particella libera di massa m e soggetta ad una forza conservativa di ener-gia potenziale V (q), q ∈ R3, e alla resistenza di mezzo di tipo viscoso F = −kq. Si verificadirettamente che le equazioni dinamiche per tale sistema, cioe mq = −∇V (q)− kq, sono le
equazioni di Euler-Lagrange con Lagrangiana L(q, q, t) = ekmt(1
2m|q|2 − V (q)).
8.2 Minimo nel Calcolo delle Variazioni: il Principio dellaMinima Azione
Talvolta, il Principio Variazionale di Hamilton e detto Principio della Minima Azione.In realta, almeno nel caso puramente meccanico per semplicita, e per una particella,L(q, q) = 1
2m|q|2 − V (q), q ∈ R3, V : en. potenziale, verificheremo che la curva q(·) ∈ Γq0,q1t0,t1
stazionarizzante J , se t1 e sufficientemente vicino a t0, e un minimo stretto locale per J .A differenza del modo di operare nel Principio di Hamilton, dobbiamo ora introdurre unatopologia in Γq0,q1t0,t1
per poter chiarire cosa significa locale. Inoltre, tale minimo locale lo vo-gliamo rilevare mediante un conto diretto, un adattamento agli spazi infinito dimensionalidel “test delle derivate seconde”. Notiamo pero che un adattamento ingenuo di tale criterioal caso infinito dimensionale e destinato al fallimento: per esempio, la naturale richiesta
J ′′[q](h, h) > 0
per ogni non nullo h(·) ∈ Γ0,0t0,t1
, in qualche palla centrata nello zero e per qualche norma,non implica in tutta generalita che q(·) sia un minimo locale: dovremo rafforzare tale
134

condizione di positivita sulle derivate seconde (di Frechet) p.e. con la coercivita locale; atal scopo si veda un contro-esempio nell’Osservazione 4 alla fine della Sezione.
Riportiamo 2 nei dettagli (che sono semplici) il seguente fatto generale, valido neglispazi normati, adattato al nostro ambiente del calcolo delle variazioni elementare.
Proposizione (Coercivita locale induce minimo locale):
(i) Sia (X, ‖ · ‖), uno spazio normato affine di curve tra due configurazioni fissate, X =Xq0,q1t0,t1
= q +X0,0t0,t1
per una prefissata arbitraria q ∈ X,
(ii) sia J : (X, ‖ · ‖)→ R un funzionale C2(X;R),
(iii) sia q ∈ X stazionario 3 per J :
J ′(q)h = 0, ∀h ∈ X0,0t0,t1
,
(iv) supponiamo esista una costante positiva α > 0 tale che (coercivita locale):
J ′′[q](h, h) ≥ α‖h‖2 per ogni h ∈ X0,0t0,t1
Allora q e un minimo stretto locale per J nella topologia indotta da ‖ · ‖.Prova. Dalla formula di Taylor,
J [q + h]− J [q] =1
2!J ′′[q](h, h) + ‖h‖2g(q, h),
ove g(q, h) e una funzione infinitesima per ‖h‖ → 0. Dunque,
J [q + h]− J [q] ≥(1
2α+ g(q, h)
)‖h‖2
e per h piccolo (nella norma scelta ‖ · ‖) e diverso da zero (cioe, la curva h(t) ≡ 0),sicuramente (1
2α+ g(q, h)) > 0 e dunque
J [q + h] > J [q].
Osservazione 1. Nella norma della convergenza uniforme,
‖ · ‖∞ = supt∈[t0,t1]
|q(t)|,
il funzionale J , nel caso meccanico, non e neppure continuo. Si pensi p.e. a q ∈ R, t0 = 0
e t1 = π, q0 = 0 = q1, L = |q|22 − V (q) e si consideri la curva q(t) ≡ 0. Construiamo la
2Per semplicita, in questa Sezione scriveremo talvolta per esempio q e non q(·).3Si noti che J ′(q)h e J ′′[q](h, h) sono le derivate prime e seconde di Frechet secondo la norma ‖ · ‖.
135

successione hn(t) = sin(nt)n compatibile con il problema al bordo scelto. Si vede subito che
vale4
limn→+∞
‖hn‖∞ = 0,
ciononostante
J [hn]− J [0] =
∫ π
0
[cos2(nt)
2− V
(sin(nt)
n
)]dt+ π V (0)
non tende a zero.Osservazione 2. Si puo facilmente dimostrare che J =
∫ t1t0L(q(t), q(t))dt e invece continuo
nella norma ‖q(·)‖C1 , in effetti, risulta C2 nella norma C1 per qualunque Lagrangiana C2.Osservazione 3. Vedremo di seguito che per una conveniente applicazione della prece-dente proposizione potremo scegliere la norma nello spazio di Sobolev W 1,2, dove per W r,s
si intende lo spazio delle funzioni che assieme a tutte le derivate fino all’ordine r sonoin Ls. Piu precisamente, Per W 1,2 si intende lo spazio funzionale che si ottiene conside-rando il completamento delle funzioni C∞([t0, t1];RN ) nella metrica indotta dalla norma:‖q‖2W 1,2 :=
∫ t1t0|q(t)|2dt+
∫ t1t0|q(t)|2dt; si dimostra che vale l’immersione: W 1,2 ⊂ C0. Tale
spazio spesso lo si denota come H1, ed e pure Hilbertiano, dotato del naturale prodottoscalare: 〈f(·), g(·)〉H1 =
∫ t1t0f(t)g(t)dt+
∫ t1t0f(t)g(t)dt.
E stato solo recentemente mostrato che il funzionale J e C2 in H1 se e solo se per laLagrangiana in studio la restrizione q 7→ L(t, q, q) e polinomiale al piu di grado due5 –comeesattamente accade nel caso meccanico e geodetico!Per generali Lagrangiane con q 7→ L(t, q, q) convessa e a crescita quadratica all’infinitopossiamo solo aspettarci che J sia C1,1 in H1, cioe C1 con derivata prima Lipschitziana6.
Di seguito, usando la Proposizione sopra discussa, pur rinviando alla Sezione 8.3 l’intro-duzione del calcolo variazionale in H1, mostriamo delle locali (sia nell’ambiente funzionale,sia nel tempo)
Condizioni di minimo nel Calcolo delle Variazioni in H1 (per il caso meccanico):Sia J(q) =
∫ t1t0
[12m|q(t)|
2 − V (q(t))]dt. Valga 7
J ′[q]h = 0 ∀h ∈ H10 ([t0, t1],Rn)
Sotto l’ipotesi che l’intervallo [t0, t1] sia convenientemente piccolo:
t1 − t0 <
√2m
(maxt∈[t0,t1]
(max|spec∇2V (q(t)) |))−1
,
4ma non p.e. nella norma ‖q(·)‖C1 = ‖q(·)‖∞ + ‖q(·)‖∞.5Si veda proposition 2.3 in Abbondandolo A., Schwarz M., A smooth pseudo-gradient for the Lagrangian
action functional, Adv. Nonlinear Stud. 9 (2009) 597-623.6Si veda p.e. in Mazzucchelli M., The Lagrangian Conley conjecture, Commentarii Mathematici Helvetici
86 (2011), no. 1, 189-246.7h ∈ H1
0 ([t0, t1],Rn) ⇐⇒ h ∈ H1([t0, t1],Rn) e h(t0) = 0 = h(t1).
136

esiste un opportuna costante α > 0 tale che
J ′′[q](h, h) =d2
dλ2J [q + λh]|λ=0 ≥ α‖h‖2H1 , ∀h ∈ H1
0 ,
per cui q e un minimo locale 8 per J in H1.Prova.
d2
dλ2J [q + λh]|λ=0 = ddλ
ddλJ [q + λh]|λ=0
= ddλ∫ t1t0
[m(q + λh) · h−∇V (q + λh)] · h dt|λ=0
=∫ t1t0m|h|2dt−
∫ t1t0∇2ijV (q)hihjdt
≥∫ t1t0m|h(t)|2dt−
∫ t1t0
max|spec∇2V (q(t))| · |h(t)|2dt,
d2
dλ2J [q + λh]|λ=0 ≥∫ t1t0m|h|2dt− c
∫ t1t0|h|2dt, (1)
ove c := maxt∈[t0,t1](max|spec∇2V (q(t))|). Allo scopo di stimare∫ t1t0|h|2dt relativamente a∫ t1
t0|h|2dt richiamiamo la disuguaglianza di Cauchy-Schwarz:(∫ b
afgdt
)2
≤∫ b
af2dt
∫ b
ag2dt.
Usando il fatto che h(t0) = 0, abbiamo che∫ t1
t0
|h(t)|2dt =
∫ t1
t0
3∑i=1
(hi(t))2dt =
∫ t1
t0
3∑i=1
(∫ t
t0
hi(τ)dτ
)2
dt.
Stimiamo quest’ultimo membro con Cauchy-Schwarz,
3∑i=1
(∫ t
t0
1 · hi(τ)dτ
)2
≤3∑i=1
∫ t
t0
dτ
∫ t
t0
(hi(τ)
)2dτ = (t− t0)
∫ t
t0
|h(τ)|2dτ.
Dunque ∫ t1
t0
|h(t)|2dt ≤∫ t1
t0
(t− t0)
(∫ t
t0
|h(τ)|2dτ)dt
≤∫ t1
t0
(t− t0)dt
∫ t1
t0
|h(τ)|2dτ =1
2(t1 − t0)2
∫ t1
t0
|h|2dt.
8Non dimostreremo qui che J e due volte differenziabile secondo Frechet, si rinvia alle considerazionie note appena svolte; useremo il fatto che in tal caso le derivate direzionali esistono e coincidono con lederivate di Frechet.
137

Abbiamo pertanto che
‖h‖2L2 ≤1
2(t1 − t0)2‖h‖2L2 . (2)
Otteniamo per ( 1):
J ′′[q](h, h) =d2
dλ2J [q + λh]|λ=0 ≥ m‖h‖2L2 − c‖h‖2L2
≥(
2m
(t1 − t0)2− c)‖h‖2L2 .
Ora α1 := 2m(t1−t0)2 − c > 0 se e solo se t1 − t0 <
√2mc . D’altra parte, ancora con ( 2), vale
pure la stima
J ′′[q](h, h) ≥ m‖h‖2L2 − c‖h‖2L2 ≥(m− c1
2(t1 − t0)2
)‖h‖2L2
ove α2 := m− 12c(t1 − t0)2 > 0 se e solo se (come prima) t1 − t0 <
√2mc . Infine otteniamo
una stima9 nella norma di Sobolev H1:
J ′′[q](h, h) ≥ 1
2minα1, α2(‖h‖2L2 + ‖h‖2L2) =
1
2minα1, α2‖h‖2H1 = α‖h‖2H1
Osservazione 4.Il seguente esempio mostra che in ambiente infinito dimensionale il test ‘ingenuo’ del-le derivate seconde sui punti critici, cioe, derivata seconda definita positiva (ma nonuniformemente), possa talvolta fallire.
Consideriamo lo spazio X = l2(N,R) 3 ξ = (ξj)j=0,1,...,+∞, con ‖ξ‖l2 = (∑
j∈N ξ2j )1/2. Sia
f : X → R data da
f(ξ) =+∞∑j=0
ξ2j
j + 1−
+∞∑j=0
ξ3j .
Le derivate di Frechet prime e seconde sono date da
f ′(ξ)h = 2+∞∑j=0
ξjhjj + 1
− 3+∞∑j=0
ξ2jhj ,
f ′′(ξ)[h, k] = 2
+∞∑j=0
hjkjj + 1
− 6+∞∑j=0
ξjhjkj .
9Nota che α2 = α1(t1−t0)2
2.
138

f ′(ξ)h = 0 :2ξjj + 1
− 3ξ2j = 0, ξj(
2
j + 1− 3ξj) = 0
ξ∗j = 0 oppure ξ∗∗j =2
3
1
j + 1
0 = f(ξ∗) < f(ξ∗∗) =4
27ζ(3)
In particolare
f ′′(0)[h, h] =d2
dλ2f(λh)|λ=0 = 2
+∞∑j=0
h2j
j + 1> 0,
se h = (hj) 6= 0. In ogni palla centrata in ξ∗ = 0 e di raggio ρ ci sono tutti i vettori deltipo rej , ove r ∈ (0, ρ] e ej = (0, ..., 0, 1, 0, ...) e si ha che, se j e abbastanza grande,
f(rej) =r2
j + 1− r3 < 0
Dunque, benche ξ∗ = 0 sia un punto critico per f con f ′′(0)[h, h] > 0, ξ∗ = 0 non e minimolocale.
8.3 Sinossi di Teoria Variazionale in H1
Vediamo con qualche dettaglio cosa significa che una curva
q(·) ∈ Γq0,q1t0,t1=q(·) ∈ H1([t0, t1],Rn) : q(t0) = q0, q(t1) = q1
rende stazionario il funzionale di Hamilton. Useremo le notazioni: Lq = ∂L
∂q e Lq = ∂L∂q .
Introduciamo inizialmente il seguenteLemma di DuBois-Reymond Sia ϕ ∈ L2([t0, t1],Rn) e supponiamo che∫ t1
t0
ϕ(t)h(t)dt = 0 ∀h ∈ H10 ([t0, t1],Rn)
Allora, quasi ovunque,ϕ(t) ≡ costante.
Prova. Valga la condizione integrale variazionale e definiamo µ := 1t1−t0
∫ t1t0ϕ(t)dt ∈ R,
questo e possibile poiche ϕ ∈ L2 ⊂ L1. Prendiamo h(t) :=∫ tt0
(ϕ(s) − µ)ds e osserviamo
che questa scelta di h e effettivamente in H10 :
h(t0) = 0 = h(t1), h = ϕ− µ ∈ L2
139

e
||h||2L2 =
∫ t1
t0
(∫ t
t0
(ϕ(s)− µ) ds
)·(∫ t
t0
(ϕ(s)− µ) ds
)dt ≤
≤ (t1 − t0) supt∈[t0,t1]
∣∣∣∣∫ t
t0
(ϕ(s)− µ)ds
∣∣∣∣2 < +∞
dato che ϕ ∈ L1. Infine
0 =
∫ t1
t0
ϕ(t)h(t)dt =
∫ t1
t0
ϕ(t)(ϕ(t)− µ)dt =
∫ t1
t0
(ϕ(t)− µ)2dt,
poiche ϕ− µ ∈ L2 ne segue che quasi ovunque ϕ(t) ≡ µ.
Proponiamo ora una versione del teorema variazionale fondamentale in tale nuovo ambientefunzionale, l’analogo in H1 del Principio di Hamilton sopra visto in C2.Teorema - Principio Variazionale di Hamilton in H1: Supponiamo che la Lagran-giana
L : Rn × Rn → R
sia tale che per il funzionale di Hamilton, ora definito nel seguente sotto-spazio affine diH1,
J : Γq0,q1t0,t1=q(·) ∈ H1([t0, t1],Rn) : q(t0) = q0, q(t1) = q1
−→ R
valga la condizione variazionale
dJ(q)h =d
dλJ(q + λh)|λ=0 =
∫ t1
t0
[Lq(q(t), q(t))h(t) + Lq(q(t), q(t))h(t)]dt = 0
∀h ∈ H10 ([t0, t1],Rn) = Γ0,0
t0,t1. Se
(i) P (t) :=∫ tt0Lq(q(s), q(s))ds ∈ L2,
(ii) Lq(q(t), q(t)) ∈ L2,allora per quasi ogni t ∈ [t0, t1]:
P − Lq = cost. (3)
Osservazione Si noti che quest’ultima relazione ( 3) e precisamente la versione integraledelle equazioni di Euler-Lagrange: se q ∈ C2, allora
d
dt(P − Lq) = Lq −
d
dtLq = 0.
Prova.
0 =
∫ t1
t0
[Lq(q(t), q(t))h(t) + Lq(q(t), q(t))h(t)]dt =
140

= P (t)h(t)|t1t0 −∫ t1
t0
(P − Lq)hdt,
il precedente Lemma ci conduce direttamente alla tesi.
Il caso meccanico In tal caso, le ipotesi sono facilmente soddisfatte: sia L = 12 |q|
2−U(q),Lq = q e se q ∈ H1 allora q ∈ L2. Se U : Rn → R e in C1, allora
P (t) = −∫ t
t0
∇U(q(s))ds,
e una funzione continua sull’insieme compatto [t0, t1], pertanto P ∈ L2.
8.4 Minimo Forte e Minimo Debole
Riconsideriamo l’insieme tipico di curve del Calcolo delle Variazioni relative al funzionaledi Hamilton J [q(·)] =
∫ T0 L(q(t), q(t), t)dt,
Γ =q(·) ∈W 1,2([0, T ];RN ) = H1([0, T ];RN ) : q(0) = q0, q(T ) = qT
||q(·)||H1 :=(
1T
∫ T0 |q(t)|
2dt)1/2
+(
1T
∫ T0 |q(t)|
2dt)1/2
||q(·)||C1 := supt∈[0,T ] |q(t)|+ supt∈[0,T ] |q(t)|,
||q(·)||C0 := supt∈[0,T ] |q(t)|.
La definizione di norma H1 qui appena sopra assegnata appare diversa da quella introdottaqualche pagina indietro: e un semplice esercizio mostrare che sono definizioni equivalenti10.
Per ogni curva q(·) ∈ Γ ∩ C1 si ha che
||q(·)||C0 ≤ ||q(·)||C1
e quindi la curva q(·) ∈ Γ∩C1 tale che ||q(·)||C1 ≤ r, cioe appartenente alla palla B1(r) inC1 centrata in q = 0, e pure in B0(r):
B1(r) ⊂ B0(r)
questo, com’e noto, significa che la topologia C1 e piu fine (o piu forte) della topologiaC0.
10vedi p.e. Capitolo 9 di Brezis H., Analisi funzionale. Teoria e applicazioni: Matematica e fisica ‘testi’ed.: 1986.
141

Nonostante questa nomenclatura,
i) se q∗(·) e tale che per qualche ε > 0:
J [q∗(·)] ≤ J [q(·)], ∀q(·)− q∗(·) ∈ B0(ε) (?)
diremo che q∗(·) e un minimo forte,
ii) se q∗(·) e tale che per qualche ε > 0:
J [q∗(·)] ≤ J [q(·)], ∀q(·)− q∗(·) ∈ B1(ε) (??)
diremo che q∗(·) e un minimo debole.
Osserviamo che se q∗(·) e un minimo forte, allora esso e pure un minimo debole:ovviamente, discende da B1(ε) ⊂ B0(ε). Piu precisamente, se ‘una certa proprieta’ valeper ogni q(·)− q∗(·) ∈ B0(ε), allora ‘la stessa proprieta’ vale per ogni q(·)− q∗(·) ∈ B1(ε).
8.5 Moti spontanei e geodetiche su varieta
Sia S ⊂ R3, dimS = 2, una superficie su cui vincoliamo senza attrito una particella dimassa m > 0,
S → R3, q = (qh)h=1,2 7→ x(q) ∈ R3.
Supponiamo assenti le forze attive; ne segue che i moti dinamicamente possibili tra dueconfigurazioni q0 e q1 e nell’intervallo di tempo [t0, t1] sono tutte e sole le curve che stazio-narizzano il funzionale
J [q(·)] :=
∫ t1
t0
T (q(t), q(t))dt,
ove T (q, q) = m2
∑3i=1
∑2h,k=1
∂xi∂qh
(q) ∂xi∂qk
(q)qhqk.
Consideriamo ora un altro problema, di natura propriamente geometrica. Data la stessaS → R3, i medesimi punti q0 e q1 e l’intervallo [t0, t1], ora non interpretabile necessaria-mente come “tempo”, consideriamo il funzionale, definito (come J) in
Γq0,q1t0,t1= q(·) ∈ C2([t0, t1];RN ) : q(t0) = q0, q(t1) = q1,
ed individuante la lunghezza della curva q(·):
l[q(·)] :=
∫ t1
t0
|dxdt
(q(t))|R3dt =
∫ t1
t0
[
3∑i=1
(
2∑h=1
∂xi∂qh
(q(t))qh)(
2∑k=1
∂xi∂qk
(q(t))qk)]12dt =
=
∫ t1
t0
√2
mT (q(t), q(t))dt.
142

Il problema geometrico e il seguente: determinare le curve che stazionarizzano il funzionalelunghezza l[q(·)]. Diremo geodetiche le curve che risolvono tale problema. Che relazioneintercorre tra i due problemi variazionali? Iniziamo con un’indagine sulle equazioni diEuler-Lagrange dei due problemi variazionali. Supporremo ovviamente q0 6= q1 e t0 < t1.
Lemma 1 Se q(·) ∈ Γq0,q1t0,t1risolve le equazioni di Lagrange con L = T , allora q(·) risolve
le equazioni di Lagrange con L =√
2mT .
Prova. Lungo il moto q(·) la funzione L = T e costante —T e l’integrale dell’energia—, edinoltre, dato che q0 6= q1, T > 0. Il lemma segue per verifica diretta.
d
dt
∂√
2mT
∂qi−∂√
2mT
∂qi=
=d
dt(
1
2√
2mT
2
m
∂T
∂qi)− 1
2√
2mT
2
m
∂T
∂qi=
1√2mT
(d
dt
∂T
∂qi− ∂T
∂qi) = 0.
Dunque, i moti spontanei (V = 0) su di una superficie liscia sono geodetiche. Ma
data una geodetica, intesa come risolvente le equazioni di Lagrange per L =√
2mT , resta
associato ad essa qualche moto spontaneo? Indaghiamo sulla struttura delle equazioni di
Lagrange per L =√
2mT .
Lemma 2 Se t 7→ q(t) risolve le equazioni di Lagrange per L =√
2mT , allora, per ogni
arbitraria riparametrizzazione del tempo t = t(τ), t′ > 0, t(·) ∈ C2, la curva τ 7→ q(t(τ))
risolve ancora le equazioni di Lagrange per L =√
2mT .
Prova. Cio deriva dal fatto che√
2mT e positivamente 1−omogenea in q: ∀λ ≥ 0,√
2mT (q, λq) = λ
√2mT (q, q).
(∗) l[q(t(·))] =∫ τ(t1)τ(t0) L(q(t(τ)), ddτ q(t(τ)))dτ =
∫ τ(t1)τ(t0) L(q(t(τ)), ddtq(t)|t=t(τ))
dtdτ (τ)dτ =
=
∫ t1
t0
L(q(t),d
dtq(t))dt = l[q(·)].
Benche il funzionale lunghezza in (∗) sia ora definito in Γq0,q1τ(t0),τ(t1) 6= Γq0,q1t0,t1(il supporto
delle due famiglie di curve e pero lo stesso), le equazioni di Lagrange per l[·] in (∗) sono lestesse di quelle associate all’originale l[·].
Osservazione: Potevamo facilmente restare nella stessa classe Γq0,q1t0,t1prendendo non
arbitrari τ(t), ma solo le riparametrizzazioni date dai diffeomorfismi di [t0, t1] in se.
143

In effetti, se t 7→ q(t) risolve le equazioni di Lagrange per L =√
2mT con
q(t0) = q0, q(t0) = q0,
possiamo trovare infinite riparametrizzazioni t = t(τ) con t(τ0) = t0 e t′(τ0) = 1, cosicche
q(t(τ0)) = q0,d
dτq(t(τ))|τ=τ0 = q0,
cioe τ 7→ q(t(τ)) risolve lo stesso problema di Cauchy. Tale degenerazione del problema di
Cauchy per le equazioni di Lagrange associate a L =√
2mT era pero annunciata: infatti
tali equazioni non si lasciano porre in forma normale. Infatti:
L(q, λq) = λL(q, q) implica (t. di Euler sulle f. omogenee) : L(q, q) =∑i
qi∂L
∂qi,
∂L
∂qj=∂L
∂qj+∑i
qi∂2L
∂qj∂qi,
onde
det∂2L
∂qj∂qi= 0.
Tale caduta dell’unicita nel problema di Cauchy, legata alla non esistenza della forma nor-male, e la sola degenerazione consentita. Non e possibile trovare soluzioni di un medesimoproblema di Cauchy q(t0) = q0, q(t0) = q0 con supporti (immagini) diversi, biforcantesi,
per L =√
2mT . Per chiarire cio, mostriamo preliminarmente il seguente
Lemma 3 Per ogni t 7→ q(t) risolvente le equazioni di Lagrange per L =√
2mT esiste
sempre qualche riparametrizzazione t(τ) che rende L =√
2mT costante lungo la nuova
curva τ 7→ q(t(τ)).
Prova. Sia [t0, t1] 3 t 7→ q(t) risolvente le equazioni di Lagrange per L =√
2mT , cerchiamo
t(τ) tale che
L(q(t(τ)),d
dτq(t(τ))) =
√2
mT (q0, q0) : cost., t(τ0) = t0,
ove q(t0) = q0,dqdt (t0) = q0. Si ottiene una semplice equazione differenziale del primo ordine
in R per t(τ),
dt
dτ(τ) =
√2mT (q0, q0)
L(q(t(τ)), ddtq(t)|t=t(τ))(= X(t(τ))), t(τ0) = t0.
144

Si noti che risulta: dtdτ (τ0) = 1.
A questo punto, con un argomento analogo a quello del lemma 1 (a ritroso), e faci-le vedere che τ 7→ q(t(τ)) risolve Euler-Lagrange per L = T e per tali equazioni vale ilteorema di esistenza e unicita per il problema di Cauchy. Se esistesse un’altra soluzione
delle equazioni per L =√
2mT del medesimo problema di Cauchy ma con supporto di-
verso, allora, procedendo ancora con una riparametrizzazione come quella del lemma 3,giungeremmo a due distinte soluzioni di uno stesso problema di Cauchy per le equazioni diEuler-Lagrange relative a L = T : assurdo.Qualche commento per generalizzare. Abbiamo
visto che il problema di “rettificazione” delle curve su superfici 2-dimensionali S ha fattoereditare in maniera naturale una metrica Riemanniana g su S dalla metrica euclidea diR3.
g : S −→ L(TS ×S TS,R)
q = (q1, q2) 7−→ g(q) =(ghk(q)
)h,k=1,2
,
cioe, non appena fissiamo q ∈ S, g(q) e un’applicazione bi-lineare definita positivadalle coppie di vettori dello spazio tangente a S nel punto q, TqS, e a valori in R, un‘prodotto scalare’ dunque, tale che il quadrato della ‘norma’ (indotta da g) di un vettorev = (v1, v2) ∈ TqS e dato da:
||v||2q :=2∑
h,k=1
ghk(q)vhvk.
Perche diciamo che tale mappa g e una metrica? In R3 la metrica euclidea e data dalla
matrice identita I =(δij
)i,j=1,2,3
e la rettificazione (il calcolo della lunghezza) di una curva
[a, b] 3 t 7→ x(t) in R3 e data da
lI(x(·)) =
∫ b
a
√√√√ 3∑i,j=1
δij xi(t)xj(t) dt,
invece, la rettificazione di una curva [a, b] 3 t 7→ qh(t), h = 1, 2, su di una superficie dotatadi una metrica Riemanniana, e data da
lg(q(·)) =
∫ b
a
√√√√ 2∑h,k=1
ghk(q(t)
)qh(t)qk(t) dt.
Queste formule giustificano la scrittura usuale di metrica Riemanniana:
dl2 =2∑
h,k=1
ghk(q)dqhdqk.
145

ESEMPI:
le geodetiche sul1) piano euclideo: ds2 = dx2 + dy2,2) sulla sfera,
3) sul piano di Lobacevskij-Klein-Poincare: ds2 = dx2+dy2
y2 (y > 0).
8.6 Metrica di Jacobi. Formulazione non variazionale delPrincipio di Maupertuis
Il seguente teorema, che in generale nei manuali classici si ritrova in forma variazionale—tranne nel libro di Godbillon “Geometrie Differentielle et Mecanique Analytique” e nelmanuale di Abraham-Marsden “Foundations of Mechanics”, il lettore li consulti, sono moltobelli—, permette di utilizzare la (ben sviluppata e trattata nella letteratura matematica)teoria delle geodetiche per i sistemi meccanici vincolati con energia potenziale non banale.Piu precisamente, tale teoria permette, come vedremo, di ricondurre la determinazione deisupporti delle curve dinamicamente possibili per sistemi meccanici conservativi allo studiodi opportuni problemi geodetici.Teorema La curva t 7→ q(t) sia un moto dinamicamente possibile per il sistema di La-grangiana
L(q, q) =1
2
∑i,j
aij(q)qiqj − V (q)
e appartenente all’ipersuperficie di energia costante
E(q, q) =1
2
∑i,j
aij(q)qiqj + V (q) = e.
Allora esiste una riparametrizzazione del tempo τ = τ(t), τ ′ > 0, tale che la curva τ 7→q(t(τ)) sia un moto dinamicamente possibile per il sistema di Lagrangiana
L(q, q) =1
2
∑i,j
[e− V (q)]aij(q)qiqj ,
([e− V (q)]aij(q) : metrica di Jacobi
)e appartenente all’ipersuperficie di energia costante
E(q, q) = L(q, q) = 1.
Osservazione. Si noti che nell’ambiente Lagrangiano, in TQ, gli insiemi di livello dei duerispettivi integrali di Jacobi E = e e E = 1 sono diversi, mentre, operate le due distinte
146

trasformazioni di Legendre generate rispettivamente da L e L, gli insiemi di livello dei dueHamiltoniani H e H, H = e e H = 1, rappresentano in T ∗Q lo stesso luogo geometrico.
Prova. Consideriamo la formulazione Hamiltoniana per L,
H(q, p) =1
2
∑i,j
a−1ij (q)pipj + V (q),
(nel seguito, come spesso si usa, considereremo sottintesa la sommatoria sugli indici ripe-tuti)
qk =∂H
∂pk= a−1
kj (q)pj ,
(∗)
pk = −∂H∂qk
= −1
2
∂a−1ij
∂qk(q)pipj −
∂V
∂qk(q).
D’altra parte, la funzione Hamiltoniana associata a L e:
H =1
2
a−1ij (q)
e− V (q)pipj .
Il sistema canonico generato da H e
qk =∂H∂pk
=1
e− V (q)a−1kj (q)pj ,
(∗∗)
pk = −∂H∂qk
=1
e− V (q)−1
2
∂a−1ij
∂qk(q)pipj − [
12a−1ij (q)pipj
e− V (q)]∂V
∂qk(q).
Il campo vettoriale generante l’equazione differenziale (∗) e proporzionale al campo gene-rante l’equazione differenziale (∗∗) con funzione scalare di proporzionalita
ϕ(q, p) =1
e− V (q)> 0,
se ci limitiamo a confrontare le soluzioni di (∗) che stanno sull’ipersuperficie H = e, cioe12a−1ij (q)pipj + V (q) = e, con le soluzioni di (∗∗) che stanno sull’ipersuperficie H = 1. In
tal caso la funzione [...] in (∗∗)2 assume sempre il valore 1 lungo le soluzioni.La tesi e raggiunta ricordando che le soluzioni di x = X(x) si ottengono tutte e sole da
quelle di x = ϕ(x)X(x), ove ϕ : Rm → R∗+, mediante riparametrizzazione del tempo.
147

8.7 Riduzione Isoenergetica
Il precedente teorema sulla metrica di Jacobi puo essere pensato come un caso particolaredel seguente teorema (Aurel Wintner, The analytical foundations of celestial mechanics,1941, Sect.180). Teorema. Consideriamo una generica funzione Hamiltoniana
H1 : T ∗Q −→ R,
una generica funzione positiva f : T ∗Q −→ R, f(q, p) > 0, e un generico numero reale e1
appartente al codominio di H1.Siano in T ∗Q definiti i due seguenti campi vettoriali Hamiltoniani e ristretti alle due se-
guenti superfici di livello delle due rispettive Hamiltoniane H1 e H2, alle quali essi risultanoovviamente tangenti:
XH1 := E∇H1, su H1 = e1,
XH2 := E∇H2, ove H2 := (H1 − e1)f, su H2 = 0.
Allora le curve integrali di XH2 su H2 = 0 si ottengono tutte e sole mediante riparametriz-zazione temporale dalle curve integrali di XH1 su H1 = e1.
Prova. La dimostrazione consiste nell’accertare i seguenti due fatti:i) H1 = e1 ≡ H2 = 0: ovvio,ii) i due campi vettoriali XH1 e XH2 , entrambi tangenti all’ipersuperficie appena de-
scritta, risultano paralleli qualora ristretti su tale ipersuperficie S := H1 = e1 ≡ H2 =0:
XH2 |S = E∇H2|S = E∇[(H1 − e1)f ]|S = fE∇H1|S + (H1 − e1)E∇f |S = fE∇H1|S .
Si conclude quindi come nel precedente teorema sulla metrica di Jacobi.
Esempio (Maupertuis-Jacobi). Sia K = 12(a−1(q)p, p) un’energia cinetica in forma Hamilto-
niana, V un’energia potenziale, e un numero reale tale che il luogo q ∈ Q : e − V > 0non sia vuoto. Definiamo
H1 :=K
e− V, su H1 = e1 = 1,
e, per f = e− V ,
H2 := (H1 − e1)f = (K
e− V− 1)(e− V ) = K + V − e, su H2 = 0,
L’applicazione del teorema della riduzione isoenergetica porta alla conclusione del teoremadella metrica di Jacobi.
148

8.8 Problema di Plateau dell’area minima (o delle bolle disapone).
Consideriamo due circonferenze di ugual raggio R e poste co-assialmente (asse x) a distanza2`. Le equazioni dei due cerchi siano:
y2 + z2 = R2, x ≡ `, y2 + z2 = R2, x ≡ −`
La situazione fenomenologica e la seguente: se si prendono due cerchi di ferro dello stessoraggio R come indicato, dopo averli immersi in acqua saponata si forma una membrana chee una superficie di rotazione generata da arco di catenaria, e si osserva che allontanandolila membrana ad una distanza critica scompare, formando invece due superfici piatte suicerchi stessi.Scriviamo il generico punto OP (x, y, z) sulla superfici in studio in coordinate cilindriche:
OP (x, ϕ) =
x = x
y = r(x) cosϕ
z = r(x) sinϕ
La nostra incognita e dunque r = r(x),
r(−`) = R, r(`) = R
L’elemento di misura dell’area e:
dA =
∣∣∣∣∂OP∂x ∧ ∂OP∂ϕ∣∣∣∣ dxdϕ =
∣∣∣∣∣∣x y z1 r′(x) cosϕ r′(x) sinϕ0 −r(x) sinϕ r(x) cosϕ
∣∣∣∣∣∣ dxdϕ =
=
√r(x)2r′(x)2 + r(x)2 cos2 ϕ+ r(x)2 sin2 ϕ dxdϕ =
√r(x)2r′(x)2 + r(x)2 dxdϕ
dA = r(x)√r′(x)2 + 1 dxdϕ
Cerchiamo l’area minimizzante, in realta qui di seguito studieremo soltanto le superficicritiche, tra i due bordi:
A =
∫ 2π
0
∫ l
−lr(x)
√r′(x)2 + 1 dxdϕ = 2π
∫ x=`
x=−`r(x)
√r′(x)2 + 1 dx
Abbiamo dunque un problema variazionale con Lagrangiana (notare che x ha il ruolo chein dinamica ha il tempo t):
L(r, r′, x) = r√r′2 + 1
149

Sussiste l’integrale di Jacobi:
∂L∂x
= 0 =⇒ E =∂L∂r′
r′ − L e integrale primo.
E = r2r′2
2√r′2 + 1
− r√r′2 + 1 = c , rr′2 − r(r′2 + 1) = c
√r′2 + 1,
scrivendo− c invece di c : r = c√r′2 + 1
Si nota che r(x) ≡ R e una soluzione, e la superficie cilindrica e vale per c = R.Risolviamo l’equazione differenziale del primo ordine per separazione di variabili:
csgn(r′)d rc√(
rc
)2 − 1= dx =⇒ c
∫sgn(r′)d rc√(
rc
)2 − 1=
∫dx
c sgn(r′) cosh−1(rc
)= x+ k
r
c= cosh
(sgn(r′)
x+ k
c
)Possiamo subito trascurare il termine sgn(r′) data la parita della funzione cosh, inoltre:
r(`) = R :R
c= cosh
(`+ k
c
)
r(−`) = R :R
c= cosh
(−`+ k
c
)La parita di cosh forza `+k
c = −−`+kc oppure `+kc = −`+k
c : nel primo caso si deduce k = 0,il secondo caso e assurdo (` = 0).
Infine:r
c= cosh
(xc
)e dunque dobbiamo calibrare R, `, c tali che R
c = cosh(`c
)sia significante; poniamo ξ := `
c ,
R
`ξ = cosh ξ
Confrontando i grafici si vede che:
• R` grande, cioe ` piccolo: la retta interseca in due punti il grafico di cosh, ci sono duesoluzioni;
• se la retta e tangente al grafico di cosh: esiste un’unica soluzione;
150

• R` piccolo, cioe ` grande, cerchi molto distanti tra loro: i due grafici non si intersecano,non ci sono soluzioni.
Nel primo caso, si puo verificare che la soluzione meno vicina all’asse e un minimo localeed e l’unica stabile, si veda p.e. a p. 178 del volume: S. Hildebrandt, A. Tromba, “Theparsimonious universe. Shape and form in the natural world.” Copernicus, New York,1996. xiv+330 pp. (o a p. 164 dell’edizione italiana). La distanza critica del secondo casoe d∗ = 2`∗ = 1, 325487 R; quando i due cerchi sono tra loro ad una distanza maggiore did∗, compaiono come superfici critiche le due superfici (piatte) dei due cerchi.
8.9 Problema inverso nel Calcolo delle Variazioni: Teoremadi Volterra-Vainberg
Sia B uno spazio vettoriale di funzioni (non necessariamente normato) e sia
N : B −→ B
q(·) 7→ N [q(·)]
un operatore non lineare. Vogliamo indagare sull’eventuale struttura variazionale dell’equa-zione:
N [q(·)] = 0 & cond. iniziali e/o cond. al bordo.
151

Sia Γ un sottoinsieme di B tale che se q(·) ∈ Γ, allora le condizioni iniziali e/o al bordosono automaticamente soddisfatte. Si pensi per esempio a
B = C∞([t0, t1];Rn), Γ = Γq0q1t0t1= q(·) ∈ C∞([t0, t1];Rn) : q(t0) = q0, q(t1) = q1.
In B introduciamo un prodotto scalare 〈·, ·〉,
〈·, ·〉 : B ×B −→ R,
proseguendo con il precedente esempio,
〈·, ·〉 : C∞([t0, t1];Rn)× C∞([t0, t1];Rn) −→ R,
(q(·), p(·)) 7→ 〈q(·), p(·)〉 =
∫ t1
t0
q(t) · p(t)dt.
Ipotesi:
(i) L’operatore N sia Gateaux-differenziabile in ogni q(·) ∈ Γ e per ogni direzione h(·)appartenente allo spazio tangente Tq(·)Γ,
dN [q(·)]h(·) :=d
dλN [q(·) + λh(·)]|λ=0.
(ii) Gli spazi tangenti Tq(·)Γ siano tutti identificabili con un medesimo spazio vettorialeV detto spazio direttore, tale cioe che, scelto un arbitrario elemento q(·) di Γ, si abbia
Γ = q(·) + V.
Ancora continuando il precedente esempio, si nota che Tq(·)Γq0q1t0t1
= Γ00t0t1 che e uno
spazio vettoriale, come ci dovevamo aspettare.
Supporremo infine che, per la scelta operata di Γ e di 〈·, ·〉, sussista il “Lemma fonda-mentale del Calcolo delle Variazioni”:
∀q(·) ∈ Γ : 〈f(·), h(·)〉 = 0, ∀h(·) ∈ TqΓ ⇐⇒ f(·) = 0.
Il seguente teorema di Volterra, che compare in
V. Volterra, Lecons sue les Fonctions de Ligne, Gauthier-Villars, Paris, 1913,
fu in tempi relativamente recenti “riscoperto” da Vainberg,
M. M. Vainberg, Variational Methods for the Study of Nonlinear Operators, Holden-Day,San Francisco, 1964.
152

Teorema Stanti le sopra elencate ipotesi su Γ, N, 〈·, ·〉, supponiamo che
〈dN [q(·)]h(·), k(·)〉 = 〈dN [q(·)]k(·), h(·)〉, ∀q(·) ∈ Γ, ∀h(·), k(·) ∈ Tq(·)Γ,
cioe, il differenziale di Gateaux di N sia simmetrico. Allora e solo allora l’equazione
N [q(·)] = 0, q(·) ∈ Γ, (∗)
ammette formulazione variazionale, cioe le soluzioni di (*) sono tutti e soli i punti stazio-nari del funzionale
J : Γ −→ R,
q(·) 7→ J [q(·)] =
∫ λ=1
λ=0〈N [q(·) + λ(q(·)− q(·))], q(·)− q(·)〉 dλ,
cioe:
dJ [q(·)]h(·) = 0, q(·) ∈ Γ, ∀h(·) ∈ Tq(·)Γ (∗∗)
ove q(·) e un arbitrario prefissato elemento di Γ.
Prova. Calcoliamo, scrivendo semplicemente q invece di q(·),
dJ [q]h =
∫ λ=1
λ=0〈dN [q + λ(q − q)]λh, q − q〉 dλ +
∫ λ=1
λ=0〈N [q + λ(q − q)], h〉 dλ,
usiamo la condizione di simmetria di dN ,
dJ [q]h =
∫ λ=1
λ=0〈dN [q + λ(q − q)](q − q), λh〉 dλ +
∫ λ=1
λ=0〈N [q + λ(q − q)], h〉 dλ =
=
∫ λ=1
λ=0(d
dλN [q + λ(q − q)], λh〉+ 〈N [q + λ(q − q)], h〉) dλ =
= 〈N [q + λ(q − q)], λh〉|λ=1λ=0 = 〈N [q], h〉.
Si conclude con il Lemma fondamentale del Calcolo delle Variazioni.
Riprendendo l’esempio in corso, sia
N [q] = A(q)− q,
da cui
dN [q]hi =d
dλ(Ai(q + λh)− qi − λhi)|λ=0 =
= Ai,j(q)hj − hi.
153
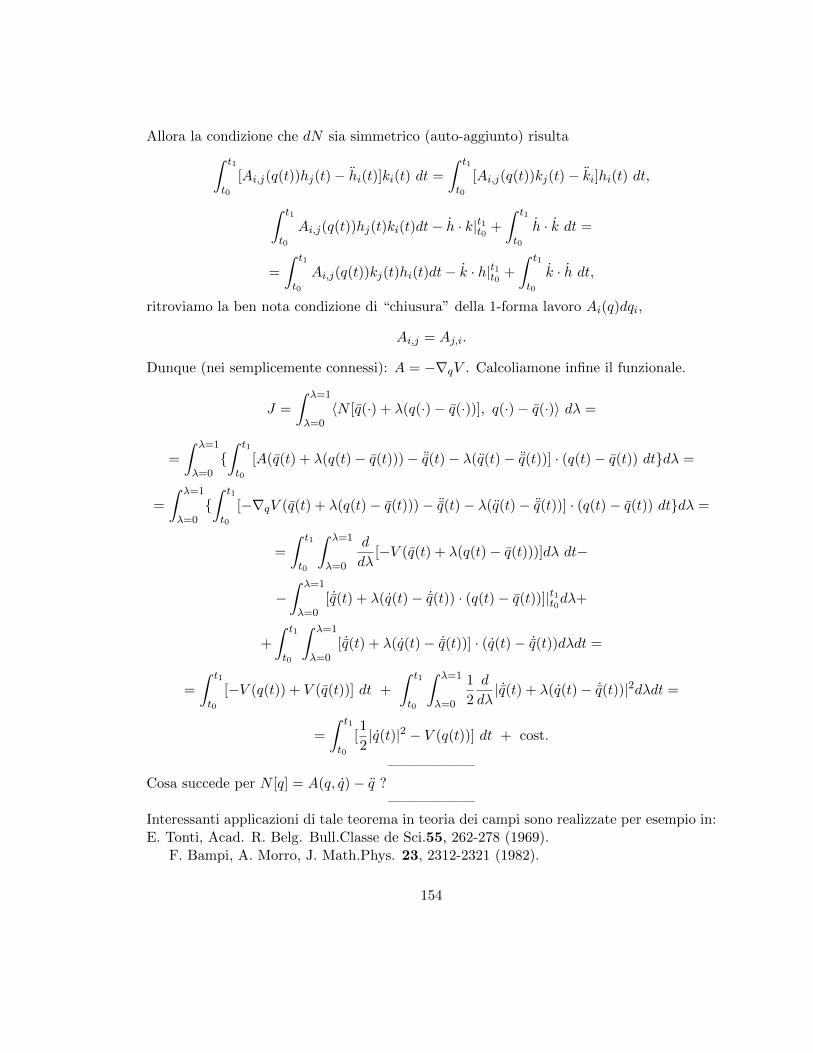
Allora la condizione che dN sia simmetrico (auto-aggiunto) risulta∫ t1
t0
[Ai,j(q(t))hj(t)− hi(t)]ki(t) dt =
∫ t1
t0
[Ai,j(q(t))kj(t)− ki]hi(t) dt,
∫ t1
t0
Ai,j(q(t))hj(t)ki(t)dt− h · k|t1t0 +
∫ t1
t0
h · k dt =
=
∫ t1
t0
Ai,j(q(t))kj(t)hi(t)dt− k · h|t1t0 +
∫ t1
t0
k · h dt,
ritroviamo la ben nota condizione di “chiusura” della 1-forma lavoro Ai(q)dqi,
Ai,j = Aj,i.
Dunque (nei semplicemente connessi): A = −∇qV . Calcoliamone infine il funzionale.
J =
∫ λ=1
λ=0〈N [q(·) + λ(q(·)− q(·))], q(·)− q(·)〉 dλ =
=
∫ λ=1
λ=0∫ t1
t0
[A(q(t) + λ(q(t)− q(t)))− ¨q(t)− λ(q(t)− ¨q(t))] · (q(t)− q(t)) dtdλ =
=
∫ λ=1
λ=0∫ t1
t0
[−∇qV (q(t) + λ(q(t)− q(t)))− ¨q(t)− λ(q(t)− ¨q(t))] · (q(t)− q(t)) dtdλ =
=
∫ t1
t0
∫ λ=1
λ=0
d
dλ[−V (q(t) + λ(q(t)− q(t)))]dλ dt−
−∫ λ=1
λ=0[ ˙q(t) + λ(q(t)− ˙q(t)) · (q(t)− q(t))]|t1t0dλ+
+
∫ t1
t0
∫ λ=1
λ=0[ ˙q(t) + λ(q(t)− ˙q(t))] · (q(t)− ˙q(t))dλdt =
=
∫ t1
t0
[−V (q(t)) + V (q(t))] dt +
∫ t1
t0
∫ λ=1
λ=0
1
2
d
dλ| ˙q(t) + λ(q(t)− ˙q(t))|2dλdt =
=
∫ t1
t0
[1
2|q(t)|2 − V (q(t))] dt + cost.
——————Cosa succede per N [q] = A(q, q)− q ?
——————Interessanti applicazioni di tale teorema in teoria dei campi sono realizzate per esempio in:E. Tonti, Acad. R. Belg. Bull.Classe de Sci.55, 262-278 (1969).
F. Bampi, A. Morro, J. Math.Phys. 23, 2312-2321 (1982).
154
Capitolo 9
Meccanica di Hamilton
Le motivazioni per lo studio della formulazione Hamiltoniana della Meccanica Analitica sono apparentemente dispa-
rate e disgiunte: (i) gli studiosi della teoria delle perturbazioni, gli specialisti della meccanica celeste, fin da Poincare
e Weierstrass, riconoscono che l’ambiente Hamiltoniano e ben piu ricco di quello Lagrangiano ed in esso si edifica la
cosiddetta teoria delle Trasformazioni Canoniche o Simplettiche, pilastro portante per quelle ricerche, d’altra parte
(ii) i teorici delle Equazioni alle Derivate Parziali (PDE) individuano nell’ambiente Hamiltoniano l’habitat globa-
le e naturale per le formulazioni variazionali di molte equazioni non lineari, le equazioni di Hamilton-Jacobi, che
incredibilmente emergono in contesti assolutamente lontani dalla meccanica analitica, quali per esempio, la teoria
della propagazione ondosa dei corpi elastici continui, infine (iii) la Meccanica Quantistica: e la moderna teoria della
tecnologia avanzata, delle ‘nano-tecnologie’ per esempio. Sebbene della Meccanica Classica essa rappresenti un’evo-
luzione rivoluzionaria –molto piu radicale della stessa T. della Relativita– essa poggia interamente sulla pre-esistente
descrizione Hamiltoniana classica del sistema fisico in studio. Non sappiamo quale sia la motivazione piu profonda,
la citazione di Schrodinger in copertina a queste dispense certamente mette in risalto questi ultimi due aspetti.
9.1 Introduzione
La meccanica Lagrangiana e una particolare teoria di sistemi dinamici —di interesse fisico,ma non solo— del secondo ordine su di una varieta vincolare, Q. L’ambiente naturaleper l’evoluzione al primo ordine in tale teoria e il fibrato tangente TQ, anch’esso dotatodi struttura di varieta differenziale. Alcuni risultati classici della meccanica Lagrangiana—per esempio, la proprieta di invarianza della struttura delle equazioni di Lagrange percambi di carte in Q; il teorema di Noether— mettono tuttavia in evidenza che le proprietatrasformazionali naturali di tale teoria sono legate alla struttura di varieta di Q, e non allacompleta struttura differenziale di TQ. Piu precisamente, di TQ si usa —per gli esempisopra citati— la sola struttura di ‘atlante fibrato’; in tale atlante fibrato per TQ, ereditato
155

da quello di Q, le mappe di transizione (cambio di carte) si esprimono cosı:
qi = qi(q), vi =∂qi
∂qj(q)vj .
L’utilita di un’indagine accurata degli aspetti dei sistemi dinamici meccanici legati alletrasformazioni (di coordinate) e ben esemplificata nella teoria delle Piccole Oscillazioni deisistemi Lagrangiani: la risoluzione delle equazioni linearizzate procede attraverso l’indivi-duazione di opportune successive trasformazioni (lineari, in quel caso) di coordinate in Q.Anche in quest’ultimo esempio sono utilizzate solo proprieta differenziali (carte) di Q.
Vogliamo costruire una meccanica del primo ordine, equivalente alla meccanica La-grangiana, adeguata all’utilizzo effettivo, completo, delle proprieta differenziali e di tra-sformazione (o di coniugazione) dell’ambiente in cui evolve, ambiente che naturalmente edi dimensione doppia a quella di Q. Vedremo che tale nuovo ambiente e il fibrato cotan-gente T ∗Q; la nuova meccanica e detta Hamiltoniana, e la teoria di trasformazioni utileper la ricerca delle soluzioni, o, piu realisticamente, utile al loro studio qualitativo, prendeil nome di teoria delle trasformazioni canoniche o simplettiche.
9.2 Fibrato cotangente o spazio delle fasi
Data una varieta vincolare Q e un suo atlante si dimostra che l’unione di tutti i suoi pianitangenti e una varieta che e detta fibrato tangente TQ, ha dimensione doppia di Q, erappresenta lo spazio degli atti di moto (configurazione e velocita) consentiti dal vincolo.La dimostrazione procede nel seguente modo: mediante l’atlante di Q si costruisce un’a-tlante per TQ, detto atlante fibrato, utilizzando le formule sopra scritte nell’introduzione.Notiamo che la legge di trasformazione delle velocita e del tutto naturale. Sia t 7→ qi(t) larappresentazione di una curva che in t = 0 passa per un punto P di Q, che in quelle stessecoordinate si rappresenta con una N -upla reale q0, cioe q(0) = q0, e sia dunque vi = d
dtqi(0)
la rappresentazione del vettore tangente alla curva in P, pertanto appartenente allo spaziotangente TPQ. Consideriamo il cambio di coordinate qi = qi(q). La stessa curva e orarappresentata da t 7→ qi(t) = qi(q(t)), e lo stesso vettore tangente e ora rappresentato
da vi = ddt q
i(0) = ∂qi
∂qj(q0)vj . Indicando con J := ∂q
∂q la matrice Jacobiana, sinteticamentescriviamo:
v = Jv.
Usualmente si denotano con ∂∂qi, i = 1, ..., N, i vettori tangenti coordinati ad una carta
di Q: ∂∂qi
= ddtγ(0), ove γ(t) := (q1, q2, ..., qi−1, qi + t, qi+1, ..., qN ). Accanto allo spazio
vettoriale tangente TPQ consideriamo il suo duale spazio di forme lineari T ∗PQ e denotiamocon dqi, i = 1, ..., N la base di T ∗PQ duale alla base ∂
∂qi, dqi( ∂
∂qj) = δij .
156

Le forze generalizzate fi, cioe le componenti Lagrangiane della sollecitazione, sonotipici esempi di forme: il lavoro delle forze attive associate alle componenti fi e dato dadL = fidq
i.Riassumendo, scelta una carta locale per Q, un generico vettore si rappresenta con
v = vi ∂∂qi
, mentre una generica forma lineare e data da θ = Ajdqj , e l’applicazione di
θ ∈ T ∗PQ su v ∈ TPQ e data da
θ(v) = 〈A, v〉 = Aivi.
Consideriamo l’unione insiemistica T ∗Q := ∪P∈QT ∗PQ. Come per TQ, si dimostra cheT ∗Q e una varieta introducendo un atlante fibrato ereditato da un atlante per Q. Come sitrasformano le rappresentazioni delle forme? La risposta ha un profondo significato fisicoe geometrico: le (rappresentazioni delle) forme si trasformano in modo che la valutazio-ne sui vettori (il lavoro) sia scalare invariante, cioe indipendente (come dev’essere) dallarappresentazione locale. Dunque,
θ(v) = 〈A, v〉 = 〈A, Jv〉 = 〈JT A, v〉 = 〈A, v〉,
per ogni v, pertantoA = J−TA.
Analogamente ai campi di vettori, si definiscono campi di forme lineari, che comu-nemente si dicono forme differenziali: Q 3 q 7→ (q, A(q)) ∈ T ∗Q. Esempio: cam-po di forze generalizzate (o Componenti Lagrangiane della Sollecitazione) conservative,Q 3 q 7→ (q,− ∂
∂qV (q)) ∈ T ∗Q; in questo caso tale forma differenziale e esatta, e −V e lafunzione generatrice.
9.3 Trasformazione di Legendre
Sia assegnata una funzione Lagrangiana
L : TQ× R→ R, (q, q, t) 7→ L(q, q, t),
e definiamo le seguenti funzioni
pi = pi(q, q, t) =∂L
∂qi(q, q, t).
Notiamo che tali funzioni pi, definite come componenti del differenziale di L rispetto al-le q, si atteggiano in maniera naturale ad essere interpretate quali componenti di formedifferenziali.
Supponiamo che, per ogni fissata coppia (q, t) ∈ Q × R, la mappa q 7→ p sia, almenolocalmente, invertibile; quest’ultima richiesta e senz’altro soddisfatta se per esempio vale la
157

condizione algebrica del teorema del Dini (le funzioni in studio sono C∞), rk (∂p∂q ) = max =N :
det∂2L
∂qi∂qj(q, q, t) 6= 0
Indicheremo con qi = Si(q, p, t) tale inversa. Definiamo ora la trasformazione di Legendre:
TQ× R −→ T ∗Q× R
(q, q, t) 7−→ (q, p(q, q, t), t),
la quale, nelle ipotesi di lavoro scelte, stabilisce un diffeomorfismo (almeno locale) tra TQe T ∗Q.
9.4 Globalizzazione della trasformazione di Legendre
Indagheremo ora su qualche ipotesi atte a globalizzare la costruzione locale ora stabilita. Persemplicita, sia Q = RN . Premettiamo il seguente generale teorema fortemente interessanteanche al di fuori del contesto in cui stiamo lavorando, poiche risulta essere il piu semplice(dal punto di vista della dimostrazione) teorema di invertibilita globale.Teorema (vedi per es. a pag. 137 di M. Berger e M. Berger, Perspectives in nonlinearity,ed: W. A. Benjamin, 1968) Sia Ω un aperto convesso di RN e sia f ∈ C1(Ω;RN ). Suppo-niamo che la (parte simmetrica della) matrice Jacobiana di f sia, per ogni x ∈ Ω, definitapositiva,
∂fi∂xj
(x)λiλj > 0, ∀λ 6= 0.
Allora f e iniettiva.
Prova. Dato che, evidentemente, det(∇f) 6= 0, f e sicuramente localmente invertibile: ilfatto che sia, inoltre, un diffeomorfismo con l’immagine sara garantito dalle sopra enunciateipotesi di convessita. Dobbiamo dunque mostrare che comunque scegliamo a, b ∈ Ω, a 6= b,allora f(a) 6= f(b). Sia Φ : [0, 1] 3 t 7→ Φ(t) ∈ R cosı definita:
Φ(t) = f(tb+ (1− t)a) · (b− a).
Osserviamo che Φ e ben definita data la struttura convessa di Ω. Si vede che
Φ(0) = f(a) · (b− a), Φ(1) = f(b) · (b− a).
Per raggiungere la tesi ci basta mostrare che Φ(0) 6= Φ(1): in tal caso allora f(a) 6= f(b).Calcoliamo Φ(t):
Φ(t) =∂fi∂xj
(tb+ (1− t)a)(bi − ai)(bj − aj);
dall’ipotesi sullo Jacobiano di f , Φ(t) > 0, ∀t ∈ [0, 1], ed il teorema segue.
158

L’applicazione del teorema funziona nel seguente modo: per ogni fissati (q, t) ∈ Q× Rsi identifica f con la mappa q 7→ p; se ora per ogni q ∈ RN
∂2L
∂qi∂qj(q, q, t)λiλj > 0, ∀λ 6= 0,
allora ne segue che la trasformazione di Legendre e globale. In effetti, la trasformazione esolo iniettiva con l’ipotesi appena introdotta.
Ricordiamo che almeno nel caso Lagrangiano Meccanico (cioe L = T −V ) quest’ipotesidi convessita e sempre soddisfatta.
9.4.1 Appendice: Diffeomorfismi globali di Rn in se
In realta, abbiamo bisogno di qualcosa in piu rispetto al teorema ora visto: dobbiamogarantirci la suriettivita su Rn.Teorema di inversione globale (di Rn in se) Sia f : Rn −→ Rn di classe C1 con laproprieta1
∃α > 0 :
n∑i,j=1
∂fi∂xj
(x)λiλj ≥ α|λ|2, ∀x ∈ Rn, ∀λ ∈ Rn
Allora f e un diffeomorfismo globale di Rn in se.
Prova. L’iniettivita e standard (teorema precedente). Dimostriamo la suriettivita. Dall’i-potesi si verifica che
|f(x)− f(0)| ≥ α|x|, (∗)
infatti:
|f(x)− f(0)| |x| ≥ x · (f(x)− f(0)) =
(∫ 1
0
d
dtf(tx)dt
)· x =
=
∫ 1
0
n∑i,j=1
∂fi∂xj
(tx)xixjdt ≥∫ 1
0α|x|2dt,
ne segue chelim
|x|→+∞|f(x)| = +∞. (∗∗)
Per proseguire richiamiamo alcune nozioni di topologia elementare e qualche lemma.Definizione: Una funzione continua si dice propria se le antimmagini dei compatti sonocompatte.Lemma 1 Una mappa continua f : Rn → Rn e propria se e solo se vale (∗∗).Prova Lemma 1. Supponiamo che f sia propria. Per assurdo, (∗∗) non sia valida, alloraper ogni successione xk divergente, p.e. del tipo |xk| > k, esiste M > 0 tale che, ∀k > 0,
1In altri termini, ∇f sia uniformemente definito positivo.
159

|f(xk)| ≤ M . Cio significa che per la palla chiusa B di centro 0 e raggio M , la suaantimmagine f−1(B) e illimitata, assurdo perche f e propria.
Viceversa, si suppone valga (∗∗) e sia K un compatto in Rn (Rn, come codominio di f).Esiste dunque, un M > 0 tale che K sia contenuto nella palla B di centro 0 e raggio M .Dalla continuita di f , f−1(K) e chiuso. D’altra parte, da (∗∗), f−1(K) e limitato: se fosseillimitato esisterebbe una successione xnn∈N contenuta in f−1(K) tale che per n→ +∞,|xn| → +∞ e quindi
|f(xn)| ≤M, ∀n ∈ N,
si arriva ad un assurdo perche si e supposta vera la (∗∗).Fine prova Lemma 1.
Lemma 2 Le mappe proprie sono chiuse, cioe mandano chiusi in chiusi.
Prova Lemma 2. Sia F chiuso in Rn (Rn, come dominio di f). Si vuole dimostrare chef(F ) e chiuso. Sia y ∈ f(F ), allora esiste una successione in f(F ), yn = f(xn), conxn ∈ F , tale che yn → y. Poiche ynn∈N ∪ y e compatto, tale e pure f−1 (ynn∈N ∪ y).Di conseguenza xnn∈N e limitato. Allora esiste una sottosuccessione xnj convergentead un x ∈ F = F . Per la continuita di f si ha che f(xnj )→ f(x) ∈ f(F ). D’altra parte siha anche che f(xnj )→ y, da cui f(x) = y e quindi y ∈ f(F ).
Fine prova Lemma 2.
Il Teorema di Inversione Locale offre subito il seguente
Lemma 3 Se f : Rn → Rn e un diffeomorfismo locale, allora f e una mappa aperta.
Ritornando alla dimostrazione del Teorema, si puo dire che la funzione f e propria e quindimanda chiusi in chiusi, ma essendo anche un diffeomorfismo locale e aperta, allora f(Rn)e sia chiuso che aperto, per connessione e necessariamente Rn. La suriettivita e quindidimostrata. Fine prova Teorema.
9.5 Equazioni di Hamilton
Ricordiamo che la costruzione in atto dipende da una Lagrangiana inizialmente assegnata,L. Definiamo la funzione di Hamilton, o Hamiltoniana H,
H : T ∗Q× R −→ R,
(q, p, t) 7→ H(q, p, t) := [pj qj − L(q, q, t)]|q=S(q,p,t).
Stabiliamo qualche relazione tra le derivate parziali delle funzioni L(q, q, t) e H(q, p, t):calcoliamo
∂H
∂qi(q, p, t) =
∂Sj
∂qipj −
∂L
∂qi− ∂L
∂qj∂Sj
∂qi,
dunque∂H
∂qi(q, p, t) = − ∂L
∂qi(q, S(q, p, t), t).
160

Analogamente, si vede che∂H
∂pi(q, p, t) = Si(q, p, t).
e∂H
∂t(q, p, t) = −∂L
∂t(q, S(q, p, t), t).
Il seguente teorema stabilisce l’equivalenza tra le equazioni di Lagrange e le cosidetteequazione canoniche, o di Hamilton.Teorema La curva R 3 t 7→ q(t) ∈ Q, o piu precisamente R 3 t 7→ (q(t), q(t)) ∈ TQ,risolve le equazioni di Lagrange
d
dt
∂L
∂qi− ∂L
∂qi= 0
se e solo se, stabilite le definizioni di pi(q, q, t) e di H(q, p, t), la curva R 3 t 7→ (q(t), p(t)) ∈T ∗Q risolve le equazioni (Canoniche o) di Hamilton:
d
dtqi(t) =
∂H
∂pi(q(t), p(t), t),
d
dtpi(t) = −∂H
∂qi(q(t), p(t), t).
Prova. R 3 t 7→ q(t) ∈ Q risolva le equazioni di Lagrange, cioe
d
dt
∂L
∂qi=
d
dtpi =
∂L
∂qi= −∂H
∂qi,
che corrispondono al secondo gruppo di equazioni canoniche. Anche il primo gruppo esoddisfatto, utilizzando l’inversione della trasf. di Legendre e una delle relazioni tra derivatedi L e H appena sopra scritte,
qi(t) = Si(q(t), p(t), t) =∂H
∂pi(q(t), p(t), t).
In maniera analoga si dimostra il viceversa.
Esercizi importanti:1) Dimostrare che la funzione H e un integrale primo per il sistema canonico se e solo seH e indipendente dal tempo.2) Mostrare che nel caso Lagrangiano meccanico, L = T (q, q) − V (q), l’Hamiltoniana eproprio l’energia totale H = T + V .
9.6 Principio Var. di Hamilton-Helmholtz
Sia data una Hamiltoniana H. Consideriamo la seguente Lagrangiana
L : T (T ∗Q)× R −→ R
161

(q, p, q, p, t) 7→ L(q, p, q, p, t) := p · q −H(q, p, t).
Consideriamo il differenziale direzionale (la variazione) del funzionale (detto d’azione):
A[q(·), p(·)] =
∫ t1
t0
L(q, p, q, p, t)dt
nella classe delle curve Γ:
Γ := γ : [t0, t1] 3 t 7→ (q(t), p(t)) ∈ T ∗Q, q(t0) = q0, q(t1) = q1
e nessuna restrizione sulle p(·)
Se γ ∈ Γ, allora ogni altra curva di Γ si ottiene sommando a γ una generica δγ appartenentealla classe di curve Γ0 (e uno spazio vettoriale, mentre Γ non lo e) tali che δq(t0) = 0 =δq(t1) e nessuna restrizione sulle δp(·): Γ = γ + Γ0.
dA[γ]δγ =d
dλA[γ + λδγ]|λ=0,
dA[γ]δγ =
∫ t1
t0
[(q −∇pH) · δp− (p+∇qH))δq]dt+ p · δq|t1t0 .
Dunque: la curva γ ∈ Γ rende stazionario il funzionale A nella classe di variazioni Γ0 see solo se γ risolve le equazioni canoniche tra le medesime configurazioni.
9.6.1 Interpretazione delle Equazioni di Hamilton come opportune equa-zioni di Lagrange
Si noti che potevamo dedurre le equazioni di Hamilton equivalenti al principio di Hamilton-Helmholtz scrivendo direttamente le ‘equazioni di Lagrange’ per la Lagrangiana L,
L(x, x, t) = L(q, p, q, p, t) = p · q −H(q, p, t), x = (xα)∣∣α=1,...,2N
= (q, p) ∈ T (T ∗Q) :
α = 1, . . . , N : 0 = ddt
∂L∂xα− ∂L
∂xα⇒ 0 = d
dt∂L∂qi− ∂L
∂qi= pi + ∂H
∂qi
α = N + 1, . . . , 2N : 0 = ddt
∂L∂xα− ∂L
∂xα⇒ 0 = d
dt∂L∂pi− ∂L
∂pi= −qi + ∂H
∂pi
9.6.2 Cenno sul problema delle Lagrangiane equivalenti
Diciamo che due Lagrangiane L e L di TQ×R in R sono equivalenti se ammettono le stesseequazioni di Lagrange. E semplice verificare che data una Lagrangiana L(q, q, t) una largaclasse di Lagrangiane equivalenti L si ottiene scegliendo ad arbitrio
(i) una costante c 6= 0 e
162

(ii) una funzione differenziabile F (q, t) tali che
L(q, q, t) = cL(q, q, t)− dF
dt(q, q, t),
dF
dt(q, q, t) :=
N∑i=1
∂F
∂qi(q, t)qi +
∂F
∂t(q, t)
Tale equivalenza si puo constatare in due modi:
(a) Si osservano i funzionali della formulazione variazionale: i due funzionali J e J , definitinella stessa classe di curve Γq0,q1t0,t1
, sono:
J =
∫ t1
t0
L(q(t), q(t), t)dt = c
∫ t1
t0
L(q(t), q(t), t)dt−∫ t1
t0
[N∑i=1
∂F
∂qi(q(t), t)qi(t)+
∂F
∂t(q(t), t)]dt,
J = cJ − [F (q0, t0)− F (q1, t1)] = cJ + k (k : costante in Γq0,q1t0,t1)
pertanto i punti-curve critici per J sono tutti e soli quelli per J .
(b) Si osservano le equazioni di Lagrange:
d
dt
∂L
∂qi− ∂L
∂qi=
= c
[d
dt
∂L
∂qi− ∂L
∂qi
]− d
dt
∂F
∂qi+
N∑j=1
∂2F
∂qi∂qjqj +
N∑j=1
∂2F
∂qi∂t=
= c
[d
dt
∂L
∂qi− ∂L
∂qi
]−
N∑j=1
∂2F
∂qj∂qiqj −
N∑j=1
∂2F
∂t∂qi+
N∑j=1
∂2F
∂qi∂qjqj +
N∑j=1
∂2F
∂qi∂t=
= c
[d
dt
∂L
∂qi− ∂L
∂qi
].
Si e sopra precisato che per tale strada si ottiene una larga classe di Lagrangiane equiva-lenti, proprio perche tale classificazione non e esaustiva: p.e. per la seguente Lagrangianacon q ∈ R1,
L(q, q) = e−q2−q2
+ 2 q e−q2
∫ q
0e−λ
2dλ,
si osserva (verificarlo) che e equivalente a L = 12 q
2− 12q
2, un oscillatore armonico con ω = 1,non riconducibile alla classificazione sopra proposta.
Notiamo infine che se la topologia dell’ambiente ‘varieta vincolare’ Q e abbastanzasemplice, cioe Q e semplicemente connessa, allora la classificazione di cui sopra si puoallargare (per semplicita, abbandoniamo le dipendenze eventuali dal tempo):
scegliendo ad arbitrio
(i) una costante c 6= 0 e
163

(ii) una 1-forma differenziabile chiusa θ : Q→ T ∗Q tali che
L(q, q) = cL(q, q)− 〈θ(q), q〉 = cL(q, q)−N∑i=1
θj(q)qj
d
dt
∂L
∂qi− ∂L
∂qi= c
[d
dt
∂L
∂qi− ∂L
∂qi
]−
N∑j=1
(∂θi∂qj− ∂θj∂qi
)qj = c
[d
dt
∂L
∂qi− ∂L
∂qi
]
Osservazione: Tale allargamento (alle forme chiuse) diventa pero problematico quandola topologia dell’ambiente ‘varieta vincolare’ Q e piu complessa, p.e. Q = Tn: in talcaso le equazioni di Lagrange continuano ad essere equivalenti, ma i due funzionali J eJ differiscono per delle k che sono ora costanti solo all’interno delle classi di omotopiadelle curve di Γq0,q1t0,t1
. Questa osservazione diventa interessante quando il problema non esemplicemente trovare curve critiche ma anche minimizzanti 2.
9.7 Coniugazione di Campi Vettoriali
Si consideri un’equazione differenziale in Rm con campo vettoriale possibilmente dipendentedal tempo t,
x(t) = X(x(t), t).
La famiglia di t-diffeomorfismi
Rm × R −→ Rm × R
(x, t) 7→ (y(x, t), t)
si dice che coniuga l’equazione differenziale di cui sopra all’equazione
y(t) = Y (y(t), t)
se e solo se trasforma, mediante composizione, tutte le soluzioni dell’una in tutte e solele soluzioni dell’altra. Piu precisamente, x(t) e soluzione della prima se e solo se y(t) :=y(x(t), t) e soluzione della seconda equazione differenziale.
Tale definizione puo essere naturalmente estesa ad equazioni su varieta, e nel casoHamiltoniano penseremo a equazioni differenziali su T ∗Q.
Occupiamoci per il momento dell’aspetto locale della coniugazione, e ritorniamo al casodi Rm. Stante una famiglia di t-diffeomorfismi y(x, t), che relazione intercorre tra i campi
2Questo fenomeno potrebbe essere interpretabile come una manifestazione classica dell’effetto quantisticodetto di ‘Aharonov-Bohm’, ove la forma chiusa e un potenziale vettore magnetico, si veda p.e. l’articolo diA. Tonomura e F. Nori, Disturbance without the force, Nature, Vol. 452, 20 March 2008.
164

vettoriali coniugati? Se x(t) e soluzione della prima, allora y(t) := y(x(t), t) e soluzionedella seconda equazione differenziale se e solo se
Y (y(t), t) =
d
dty(t) =
∂y
∂x(x(t), t)
d
dtx(t) +
∂y
∂t(x(t), t) =
∂y
∂x(x(t), t)X(x(t), t) +
∂y
∂t(x(t), t),
infine, pensando che per ogni punto x possiamo far transitare una soluzione, otteniamo larelazione cercata, indipendente dalle soluzioni,
Y (y, t)|y=y(x,t) = J(x, t)X(x, t) +∂y
∂t(x, t), (?)
ove
J(x, t) =∂y
∂x(x, t)
e la matrice jacobiana della trasformazione.
9.8 Trasformazioni Canoniche
Definizione: Una famiglia di t-diffeomorfismi,
T ∗Q× R −→ T ∗Q× R
(x, t) 7−→ (y(x, t), t),
che coniuga ogni sistema Hamiltoniano in un sistema di equazioni differenziali ancora ditipo Hamiltoniano, si dice Trasformazione Canonica.
Talvolta, come appena fatto, rappresenteremo localmente i vettori x ∈ T ∗Q come
“vettori colonna”, x =
(qp
); definita inoltre la matrice 2N × 2N ,
E =
(O I−I O
), E−1 = ET = −E, E2 = −I,
le equazioni di Hamilton si scrivono:
d
dtx(t) = E∇xH(x(t)), ∇x :=
(∂∂q∂∂p
)Consideriamo il seguente lemma.Lemma tecnico. Sia A(x), x ∈ Rm, una funzione C1 a valori nelle matrici m ×m taleche per ogni funzione reale f(x) esista g(x) per cui
Aij∇jf = ∇ig.
165

In altri termini, A e una mappa lineare che trasforma differenziali in differenziali. Allora
A(x) = cI
ove c e una costante reale.Prova. ∀f(x), A∇f , pensata come forma, e esatta, quindi chiusa:
∇k(Aij∇jf)−∇i(Akj∇jf) = 0.
Comunque scegliamo ad arbitrio un numero, un vettore e una matrice simmetrica, a, Gi,Sij , in corrispondenza resta definita la funzione f ,
f(x) = a+Gi(xi − xi) +
1
2Sij(x
i − xi)(xj − xj)
che in x ha esattamente valore, gradiente primo, e gradiente secondo pari alle quantitascelte. Dettagliando le condizioni di chiusura sopra scritte per A∇f ed usando l’arbitrarietanell’assegnazione di Gi e Sij otteniamo le condizioni (in x)
(i) (prendendo G = 0) AS − SAT = O, ∀S = ST ,
(ii) (prendendo S = 0) ∇kAij = ∇iAkj .
La (i) mostra che (scegliendo S = I) A e simmetrica, inoltre, mettendosi nella base in cuiA e diagonale si vede che (i) necessariamente implica che A e scalare, cioe A(x) = c(x)I.La (ii) mostra che, per i = j 6= k, vale ∇kc = 0.
La caratterizzazione delle trasformazioni canoniche si sviluppa ora in una serie dirisultati parziali, articolata in Lemmi.Lemma 1. Sia y(x, t) una tr. canonica. Allora identicamente vale
JEJT = cE, c = c(t) ∈ R \ 0.
In corrispondenza a y(x, t) esiste una funzione K0(y, t), definita a meno di costanti additivee dipendente solo da y(x, t), tale che, per ogni funzione Hamiltoniana H(x, t) nelle vecchievariabili x, la nuova Hamiltoniana K(y, t) sia data da
K(y, t) = cH(y, t) +K0(y, t).
Lo scalare c e detto la valenza della trasformazione, e H(y, t) := H(x(y, t), t).
Prova. La trasformazione y(x, t) coniuga ogni campo vettoriale Hamiltoniano
E∇xH(x, t)
166

in un nuovo campo vettoriale Hamiltoniano (si veda la formula (?) nella sezione delleconiugazioni) E∇yK(y, t):
E∇yK(y, t)|y=y(x,t) = J(x, t)E∇xH(x, t) +∇ty(x, t), (∗)
e dato che H(x, t) = H(y(x, t), t), possiamo scrivere
E∇yK(y, t)|y=y(x,t) = J(x, t)EJT (x, t)∇yH(y, t)|y=y(x,t) +∇ty(x, t) (#)
Scegliamo ora H = 0 (o, piu in generale, costante), ne segue che per qualche K0(y, t) si hache per l’ultimo termine in (∗) vale:
∇ty(x, t) = E∇yK0(y, t)|y=y(x,t),
cioe y(x, t), per ogni x fissato, e soluzione di un sistema differenziale Hamiltoniano: si usaallora dire che y = y(x, t) e risolvente del sistema differenziale (se inoltre per un t0 valey(x, t0) = x allora diremo che y = y(x, t) = Φt,t0(x) e il flusso associato a quell’equazionedifferenziale. Si notino i due tempi, dato che il c. vettoriale non e autonomo).
Dunque Y (y, t) := −E∇ty(x, t)|x=x(y,t) e un gradiente, e una primitiva cercata K0(y, t)e per esempio data da:
K0(y, t) =
∫ λ=1
λ=0Y (λy, t) · y dλ
Vediamo quindi che per ogni H(x, t) esiste K(y, t) (a meno di costanti additive) tale che
∇y(K(y, t)−K0(y, t)) = −EJEJT∇yH(y, t)
(naturalmente qui J = J(x(y, t), t)). Il lemma tecnico ci assicura che
A(y, t) := −EJEJT = c(t)I,
per qualche funzione scalare c(t) 6= 0 (poiche detE 6= 0 e det J 6= 0).
Riassumendo, data una trasformazione canonica, ad essa resta associato un Hamiltonia-no K0 e la valenza c per cui, per ogni Hamiltoniano H, il suo campo vettoriale Hamiltonianoconiugato e dato da
E∇K = cE∇H + E∇K0 (K = cH +K0)
Vedremo tra breve nei prossimi lemmi che effettivamente c e una costante indipendenteda t.
Sia ora K(y, t) una determinata funzione Hamiltoniana.
167

Lemma 2. Il flusso risolvente le equazioni canoniche associate alla funzione HamiltonianaK(y, t), y0 7→ y(t, y0), y0 = y(t0, y
0) soddisfa alla condizione algebrica sopra scritta conc = 1:
JEJT = E, ove J =∂y
∂y0.
Inoltre, y0 7→ y(t, y0) e tr. canonica.
Prova. Per ogni fissato y0, calcoliamo
∇t(JEJT )(t, y0) = ∇tJEJT + JE∇tJT ,
inoltre, dato che t 7→ y(t, y0) risolve le equazioni di Hamilton di Hamiltoniana K, y =E∇yK, differenziando ambo i membri rispetto a y0, si ottiene:
∇tJ = E∇2yKJ
pertanto∇t(JEJT ) = E∇2
yKJEJT + JE(E∇2yKJ)T =
rem : ET = −E & (∇2yK)T = ∇2
yK
= E∇2yKJEJT − JEJT∇2
yKE,
per ogni y0 fissato, la relazione appena determinata si interpreta affermando che la funzionet 7→ W := JEJT risolve l’equazione differenziale lineare con coefficienti dipendenti daltempo:
W = E∇2yKW −W∇2
yKE
W (t0) = E (infatti : J(t0) = I)
Si osserva che W (t) ≡ E risolve il problema di Cauchy, che naturamente ammette esistenzae unicita, abbiamo cosı ottenuto:
JEJT = E
Il fatto che y0 7→ y(t, y0) sia canonica si verifica direttamente: Il campo vettoriale coniugatodi un generico campo vettoriale Hamiltoniano di Hamiltoniana H e (da (#))
Y (y, t) = JEJT∇yH +∇ty = E∇y(H +K).
Lemma 3. Date due trasformazioni canoniche, (x, t) 7→ y(x, t) e (y, t) 7→ z(y, t), la lorocomposizione (x, t) 7→ z(x, t) := z(y(x, t), t) e canonica e la valenza e il prodotto dellevalenze.Prova. Indichiamo con J1 e J2 le matrici jacobiane delle due rispettive trasformazioni. ValeJiEJTi = ciE, i = 1, 2 e siano K1
0 (y, t) e K20 (z, t) le due rispettive funzioni Hamiltoniane
168

introdotte nel lemma 1. Operando come nel lemma 1, si osserva che (x, t) 7→ z(y(x, t), t)e canonica se, per ogni H(x, t), il campo vettoriale XH = E∇xH viene coniugato in unnuovo campo vettoriale Hamiltoniano. Il coniugato di XH e dato da
Z = J2J1EJT1 JT2 ∇zH(z, t) + J2EJT2 ∇yK10 + E∇zK2
0 .
Quindi Z e un campo vettoriale Hamiltoniano ZK e, posto J = J2J1, si ha
K(z, t) = c1c2H(z, t) +K0(z, t), K0(z, t) = c2K10 (z, t) +K2
0 (z, t),
JEJT = c1c2E.
Lemma 4. Ogni trasformazione canonica (x, t) 7→ y(x, t) e la composizione di unflusso Hamiltoniano con una trasformazione canonica indipendente dal tempo. Pertanto lavalenza e costante.
Prova. Abbiamo visto nel lemma 1 che il campo vettoriale Y (y, t) := ∇ty(x, t)|x=x(y,t)
e Hamiltoniano e quindi y(x, t) e una risolvente. Indichiamo con y0 = y(x, t0), e con x =x(y0) l’inversa. E’ semplice osservare che y(x, t) e la composizione di y(y0, t) := y(x(y0), t)con y0 = y(x, t0). Ora y(y0, t) e un flusso Hamiltoniano dato che in t0 e l’identita. Per illemma 2 e una trasformazione canonica di valenza costante c = 1. Inoltre y0 = y(x, t0)e canonica di valenza costante c(t0) e K0 = 0. Dunque, per il lemma 3, c(t) = 1 · c(t0):costante.
Abbiamo visto finora che se y(x, t) e canonica allora soddisfa a JEJT = cE per qualchec ∈ R. Dimostriamo infine che tale condizione algebrica e caratterizzante le trasformazionicanoniche.
Teorema. La t-famiglia di diffeomorfismi y(x, t) e canonica se e solo se, per ogni x e t incui e definita, e soddisfatta la condizione algebrica JEJT = cE, per qualche c ∈ R \ 0.
Prova. L’insieme delle t-famiglie di diffeomorfismi y = y(x, t) soddisfacenti alla condizionealgebrica si atteggia in modo naturale a gruppo rispetto all’operazione di composizione difunzioni. Infatti l’elemento neutro e la trasformazione identica y = y(x, t) = x, natural-mente di valenza c = 1. L’inversa di y(x, t) appartiene al gruppo e ha valenza cy−1(·) parial reciproco della valenza cy(·) di y(x, t):
J−1EJ−T = cy−1(·)E, onde1
cy−1(·)E = JEJT , cosicche cy−1(·) =
1
cy(·).
Da quanto appena visto per l’inversa vale J−1EJ−T = 1cE, valutando l’inverso algebrico di
quest’ultima relazione notiamo che vale
JTEJ = cE,
169

equivalente dunque alla JEJT = cE. Nel seguito, e non solo nella presente dimostrazione,sara utile usare quest’ultima versione.
Sia ora y(x, t) appartenente al sopra descritto gruppo di trasformazioni. Sia inoltreH(x, t) una arbitraria funzione Hamiltoniana definente il campo vettoriale HamiltonianoXH = E∇xH. Consideriamone il campo coniugato
JEJT∇yH(y, t) +∇ty(x, t)|x=x(y,t).
Evidentemente y(x, t) e canonica se Y (y, t) := ∇ty(x, t)|x=x(y,t) e un campo vettorialeHamiltoniano. Cioe se il campo vettoriale −E∇ty(x, t)|x=x(y,t) e un gradiente, o, equiva-lentemente in un semplicemente connesso, se la matrice
∇y(−E∇ty(x, t)|x=x(y,t))
e simmetrica. Il dettaglio mostra che questa matrice vale: −E∇tJJ−1. Dunque e simme-trica se e solo se (−E∇tJJ−1)T = −E∇tJJ−1, cioe
J−T∇tJTE = −E∇tJJ−1,
moltiplicando a destra per J e a sinistra per JT , tale relazione e equivalente a
∇tJTEJ + JTE∇tJ = 0.
Quest’ultima e certamente vera dato che vale JTEJ = cE, e c e una costante.
9.9 Condizione di Lie
Riconsideriamo il principio variazionale di Hamilton-Helmholtz. Nel seguito, come giaoperato, useremo la notazione:
x := (q, p), y := (q, p).
Prendiamo ad arbitrio una Hamiltoniana H(q, p, t) e consideriamo la Lagrangiana
L : T (T ∗Q)× R −→ R
(x, x, t) 7−→ L(x, x, t) = p · q −H(q, p, t)
si noti che tale definizione e sempre significativa, per qualunque H; infatti, L non3 e daconfondersi con la Lagrangiana associata a H mediante la trasformazione di Legendre, per
3La funzione di Lagrange correlata mediante la tr. di Legendre a H e, nell’ipotesi di convessita accennata,L(q, q, t) = supp∈RN p · q −H(q, p, t)
170

la validita di quest’ultima e invece necessaria p.e. un’ipotesi di convessita sulle derivateseconde ∂2H
∂pi∂pj.
A tale L resta associato il funzionale d’azione A[q(·), p(·)]. Ora, comunque noi operiamocambi di coordinate nello spazio delle configurazioni in cui e definita la Lagrangiana L (chee T ∗Q), cioe diffeomorfismi (x, t) 7→ (y(x, t), t) non necessariamente canonici, otterremoun nuovo funzionale A[q(·), p(·)] equivalente a A[q(·), p(·)] nel seguente senso: tutti e soli ipunti-curve stazionari dell’uno si otterranno mediante composizione con la trasformazionex 7→ y(x, t) dai punti-curve stazionari dell’altro. Si osserva che la nuova Lagrangianageneralizzata cosı ottenuta, L(y, y, t) non sara della forma della originaria L, pertanto lesue equazioni di Lagrange non saranno delle equazioni di tipo Hamiltoniano. Tale generaleoperazione equivale dunque ad una generica coniugazione.
Un’ispezione piu attenta dell’aspetto variazionale mette in evidenza che l’integraled’azione A valutato lungo una generica curva [t0, t1] 3 t 7→ γ(t) = (q(t), p(t), t) si puointerpretare come l’integrazione di γ lungo la seguente 1-forma differenziale su T ∗Q× R,
ΘH :=
N∑j=1
pjdqj −H(q, p, t)dt A[γ(·)] =
∫γ
ΘH
Ora, una condizione sufficiente4 affinche il diffeomorfismo (x, t) 7→ (y(x, t), t) trasformisistemi H(x, t)-Hamiltoniani in sistemi K(y, t)-Hamiltoniani e che esista
(i) una costante reale c 6= 0,
(ii) una funzione a valori reali F (x, t),
per cui,
ΘK
∣∣y(x,t)
= cΘH − dF (condizione di Lie)
Tale scelta, suggerita dalla teoria delle Lagrangiane equivalenti accennata in 9.6.2, operain dettaglio cosı
LK(y(x, t),∂y
∂x(x, t)x, t) = cLH(x, x, t)− [
d
dtF ](x, x, t) (•)
dove con [ ddtF ](x, x, t) si intende la “derivata totale formale” [ ddtF ](x, x, t) :=∑2N
j=1∂F∂xj
(x, t)xj+∂F∂t (x, t) e si ha:
∫ t1t0LKdt = c
∫ t1t0LHdt+ F |t1 − F |t0 .
La condizione di Lie si dettaglia:
pdq −Kdt = c (pdq −Hdt)− ∂F
∂qdq − ∂F
∂pdp− ∂F
∂tdt
4Vedremo nella prossima sezione che tale condizione e pure necessaria.
171

da cui deduciamo:
pj∂qj
∂qi= c pi − ∂F
∂qi
pj∂qj
∂pi= − ∂F
∂pi
K = cH +∂F
∂t+ pj
∂qj
∂t︸ ︷︷ ︸K0
Dalla condizione di Lie, eliminando i termini in dt coinvolgenti le funzioni Hamiltoniane,si ottiene
pδq = c pdq − δF (Cond. di Lie ridotta)
(δ: differenziale ‘virtuale’, differenzia rispetto a q e p, ma non rispetto a t).
La presenza dei termini in dq e in dq nella condizione di Lie induce a rileggere talecondizioni in variabili miste q, q, t con F1 = F1(q, q, t):
pdq −Kdt = c (pdq −Hdt)− ∂F1
∂qdq − ∂F1
∂qdq − ∂F1
∂tdt
pdq = c pdq − ∂F1
∂qdq − ∂F1
∂qdq (∗)
da cui:
(Trasformazioni F1)
p = −∂F1∂q (q, q, t)
c p = ∂F1∂q (q, q, t)
K = cH +∂F1
∂t︸︷︷︸K0
Condizione essenziale affinche queste funzioni generatrici F1(q, q, t) inducano una trasfor-mazione canonica, e che, almeno per il p.to di vista locale,
det
(∂2F1
∂q∂q(q, q, t)
)6= 0
In tal caso infatti, dalle seconde delle (F1) si esprimono le q = q(q, p, t) che, inserite nelprimo gruppo, danno pure p = p(q, p, t) ottenendo cosı la tr. cercata.
• Si osservi che valenza c e funzione generatrice F definiscono completamente la tr. cano-nica.
172

Tra i molti altri modi in cui possiamo scegliere 2N+1 variabili indipendenti, introducia-mo le tr. canoniche indotte da funzioni generatrici di tipo F2 = F2(q, p, t); riconsideriamola condizione di Lie esprimendo pdq con un’ovvia identita ‘per parti’:
d(p · q)− qdp−Kdt = c (pdq −Hdt)− dF
dove ora consideriamo tale relazione tra 1-forme nelle variabili indipendenti q, p, t,
−qdp−Kdt = cpdq − cHdt− d (F + p · q)︸ ︷︷ ︸F2(q,p,t)
pertanto:
(Trasformazioni F2)
q = ∂F2∂p (q, p, t)
cp = ∂F2∂q (q, p, t)
K = cH +∂F2
∂t︸︷︷︸K0
L’analoga condizione da richiedere e ora
det
(∂2F2
∂q∂p(q, p, t)
)6= 0
Tali trasformazioni canoniche F2 sono importanti: in tale ambito si descrive agevolmentela trasformazione identica con (valenza c = 1)
Fid(q, p) = p · q
specialmente, per la teoria delle perturbazioni.
9.9.1 La Condizione di Lie e N & S caratterizzante le TrasformazioniCanoniche
Mostriamo che ogni diffeomorfismo di (aperti semplicemente connessi di) T ∗Q× R in se euna tr. canonica, cioe soddisfacente5
JTEJ = cE5Abbiamo precedentemente visto che JTEJ = cE e JEJT = cE sono equivalenti.
173

se e solo se e soddisfatta la Condizione di Lie ridotta. A tal fine, ricordando che
x =
(qp
)y =
(qp
),
riconsideriamo la forma, in T ∗Q, data da A =∑N
i=1 pidqi =
∑2Nα=1Aα(x)dxα; la condizione
di integrabilita per essa e si scrive(∂Aα∂xβ
)=
(O IO O
) (∂Aβ∂xα
)T=
(O OI O
)∂Aα∂xβ
−∂Aβ∂xα
=
(O I−I O
)= E
ed essendo E 6= O, non e chiusa.
D’altra parte, per ogni fissato t ∈ R, per la 1-forma
A∣∣y=y(x,t)
=
N∑i=1
pidqi∣∣y=y(x,t)
=
2N∑α=1
Aα(y)dyα∣∣y=y(x,t)
= A(y(x, t))J(x, t)dx
descriviamone la condizione di chiusura (rem: J = ∇xy):
[∇x(A(y(x, t))J(x, t))]− [∇x(A(y(x, t))J(x, t))]T =
= JT∇xAJ − [JT∇xAJ ]T = JTEJ,
dove termini coinvolgenti le derivate seconde di y(x, t) si elidono per il teorema di Schwarz.
Infine, notiamo che la condizione caratterizzante le trasformazioni canoniche JTEJ −cE = O e esattamente la condizione di chiusura della 1-forma
∑Ni=1 pidq
i∣∣y=y(x,t)
−c∑N
i=1 pidqi:
ne segue che localmente e esatta e dunque esiste una funzione generatrice F (x, t) soddisfa-cente la condizione di Lie ridotta.
9.10 Metodo d’integrazione di Hamilton-Jacobi
Tra i progetti originali dei matematici che coltivavano la meccanica nell’800 –Lagrange,Hamilton, Jacobi, Weierstrass, Poisson, Poincare, e altri– era inizialmente centrale ilseguente:
Data una funzione Hamiltoniana H(q, p, t) le cui equazioni canoniche (p.e. degli n-corpi) risultavano di difficile integrazione, determinare una trasformazione canonica co-niugante tali equazioni differenziali in altre equazioni differenziali, ancora naturalmentecanoniche, ma di facile, palese, integrazione.
174

Utilizzando lo schema6 delle F2, si e dunque condotti a cercare una funzione generatrice,nel caso univalente c = 1, la Hamiltoniana trasformata sia la ‘piu’ semplice possibile:K = 0. Pertanto, determinare S(q, p, t) tale che
∂S
∂t(q, p, t) +H(q,
∂S
∂q(q, p, t), t) = 0 (equazione di H-J)
con la condizione (si veda la teoria del paragrafo precedente):
det
(∂2S
∂q∂p(q, p, t)
)6= 0 (cond. di ‘radrizzabilita’)
Da un punto di vista strettamente matematico, notiamo dunque che la conoscenza diuna qualunque soluzione (globale) S(q, p, t) dell’equazione alle derivate parziali (PDE) diHamilton-Jacobi, detta Integrale Completo, soddisfacente alla condizione di radrizza-
bilita (globale, che solo localmente si scrive come sopra: det(∂2S∂q∂p(q, p, t)
)6= 0) consente
di determinare il flusso associato alle equazioni canoniche per H. Infatti, quest’ultimosi deduce mediante coniugazione dal flusso (banale, q ≡ cost. e p ≡ cost. ) relativo alleequazioni canoniche per K = 0: Φt
K,q(t, q, p) ≡ q, ΦtK,p(t, q, p) ≡ p. La trasformazione
canonica indotta da S(q, p, t) e
p =∂S
∂q(q, p, t), q =
∂S
∂p(q, p, t)
che una volta messa in forma ‘diretta’ da
q = q(t, q, p), p = p(t, q, p)
La composizione della trasformazione col flusso di XK produce il flusso di XH , precisamen-te, per ogni arbitraria scelta delle 2N costanti (q, p), dalle formule appena scritte otteniamouna soluzione del sistema canonico originale.
In tutta generalita, tale progetto d’integrazione fallisce nel suo obiettivo primario,ciononostante e stato, ed e, di primaria importanza, per vari motivi:
1) i (pochi) sistemi Hamiltoniani che si lasciano risolvere con questo metodo sono orachiamati sistemi integrabili, fisicamente sono moto significativi (p.e. generali oscillato-ri lineari a N gradi di liberta, 2-corpi Newtoniano, corpo rigido con momento nullo) erappresentano il punto di partenza della moderna teoria perturbativa,
2) l’equazione di Hamilton-Jacobi emerge in contesti molto lontani dalla meccanicaanalitica, p.e. in ottica geometrica, propagazione delle onde nei materiali continui, inmeccanica quantistica con l’equazione di Schrodinger, in teoria del controllo ottimo, e latecnica qui raccontata viene usata in senso inverso, cioe, l’equazione PDE di H-J vienestudiata/risolta ricorrendo alle associate ODE date da XH .
6coinvolgente variabili miste (cioe, vecchie e nuove), ma interessante perche permette facilmente diindividuare trasformazioni ‘vicine’ all’identita: F2(q, p, t) = p · q + ...
175

9.10.1 Metodo d’integrazione di H-J: Hamiltoniana con n − 1 variabilicicliche
Si consideri in R2n una funzione Hamiltoniana H(q1, p1, . . . , pn) dove le variabili qα, α =2, . . . , n, sono cicliche, inoltre H e pure indipendente dal tempo.
Si supponga che ∂H∂p16= 0.
Scrivere in dettaglio il metodo di integrazione di Hamilton-Jacobi per questa Hamilto-niana, nella ricerca di una opportuna funzione generatrice:
S(q1, . . . , qn, p1, . . . , pn, t).
Si tratta di determinare una funzione generatrice S(q1, . . . , qn, p1, . . . , pn, t), di tipo F2,in variabili miste e (necessariamente) dipendente dal tempo, che generi una trasformazionecanonica che muta l’Hamiltoniana assegnata H nell’Hamiltoniana identicamente nulla K ≡0. La struttura dell’Hamiltoniana data, H(q1, p1, . . . , pn), dove tutte le variabili base sonocicliche tranne una, suggerisce di ricercare S nella seguente forma:
S(q1, . . . , qn, p1, . . . , pn, t) =
n∑α=2
pαqα +W (q1, p1, . . . , pn)− p1t
Impostando per questa S proposta l’equazione di H-J, ∂S∂t +H(q1,
∂S∂q ) = 0, otteniamo:
H(q1,∂W
∂q1, p2, . . . , pn) = p1 (∗)
Grazie all’ipotesi tecnica ∂H∂p16= 0 possiamo esprimere:
∂W
∂q1= F(q1, p1, . . . , pn)
e dunque
W (q1, p1, . . . , pn) =
∫ q1
F(λ, p1, . . . , pn)dλ
La trasformazione, in forma mista, generata da S e la seguente:
p1 = ∂S∂q1
: p1 = ∂W∂q1
q1 = ∂S∂p1
: q1 = ∂W∂p1− t
pα = ∂S∂qα
: pα = pα qα = ∂S∂pα
: qα = qα + ∂W∂pα
Infine ci chiediamo se la S cosı costruita sia effettivamente una ‘buona’ f. generatrice,cioe, dobbiamo verificare la condizione di ‘raddrizzamento’ della tr. canonica,
∂2S
∂qi∂pj6= 0 :
176

∂2S
∂qi∂pj=
∂2W∂q1∂p1
. . . ∂2W∂q1∂pα
. . .
11
1. . . . . . . . . . . . . . .
1
,
dalla (∗) vediamo che
∂H
∂p1
∂2W
∂q1∂p1= 1,
da cui, per ∂H∂p16= 0, la tesi.
9.10.2 Metodo d’integrazione di H-J: Hamiltoniana separabile
Sia data l’Hamiltoniana
H(p, q) = f(H1(p1, q1), . . . ,Hn(pn, qn)).
con l’ipotesi∂Hi
∂pi(pi, qi) 6= 0, ∀i.
Osserviamo preliminarmente che ogni funzione Hi(pi, qi) e un integrale primo del moto.Infatti
dHi
dt=∂Hi
∂qiqi +
∂Hi
∂pipi =
=∂Hi
∂qi
∂H
∂pi+∂Hi
∂pi(−∂H
∂qi) =
=∂Hi
∂qi
∂f
∂ai
∂Hi
∂pi− ∂Hi
∂pi
∂f
∂ai
∂Hi
∂qi= 0.
Scegliamo una funzione generatrice del tipo
S(q, p, t) = −f(p1, . . . , pn)t+∑i
Wi(qi, pi).
L’equazione di Hamilton-Jacobi associata
H(q,∂S
∂q) +
∂S
∂t= 0
si scrive
f(H1(q1,∂W1
∂q1), . . . ,Hn(qn,
∂Wn
∂qn)) = f(p1, . . . , pn)
177

ed e soddisfatta se e solo se le Wi risolvono le n equazioni di H-J “separate”
Hi(qi,∂Wi
∂qi(qi, pi)) = pi, i = 1, . . . , n;
per l’ipotesi ∂Hi/∂pi 6= 0, le n equazioni ammettono forma normale
∂Wi
∂qi= ϕi(qi, pi), Wi(qi, pi) =
∫ qi
qi(0)ϕi(λ, pi)dλ.
Controlliamo che S sia un integrale completo di H-J ovvero
rk(∂2S
∂qi∂pi) = max = n
Si ha facilmente
∂S
∂qi=∂Wi
∂qi= ϕi,
∂2S
∂qi∂pi=∂ϕi∂pi
= Diag[∂ϕi∂pi
].
Ma essendo
Hi(qi, ϕi(qi, pi)) = pi, ∀i
si ha che (∂Hi/∂pi 6= 0)
∂Hi
∂pi
∂ϕi∂pi
=∂pi∂pi
= 1, ⇒ ∂ϕi∂pi6= 0 ∀i
e quindi il rango e massimo.
9.10.3 Esercizi
Nei manuali:
“Meccanica Analitica” di Fasano e Marmi, Bollati-Boringhieri
“Meccanica” di Landau e Lifsic, Editori Riuniti
“Lezioni di meccanica analitica” di Gantmacher, Editori Riuniti
si trovano molti esercizi svolti in dettaglio.
Qui di seguito alcuni esempi ed esercizi tratti dalle dispense di Benettin-Galgani-Giorgilli:
178

179

Infine, generalizzare al caso N -dimensionale l’esempio qui di seguito:
180

181
182

Capitolo 10
Algebra dei Campi Vettoriali
10.1 Morfismi d’Algebra, Parentesi di Lie e di Poisson
L’insieme dei Campi Vettoriali C∞ su Rm, che denoteremo con
V ett(Rm) := C∞(Rm;Rm),
si atteggia naturalmente a R-spazio vettoriale. Se indichiamo con F := C∞(Rm;R) l’anellodelle funzioni (somma e prodotto puntuale), allora V ett(Rm) si atteggia pure a F-modulo:
∀f, g ∈ F ∀X,Y ∈ V ett(Rm) : fX + gY ∈ V ett(Rm).
Isomorfo a V ett(Rm), resta definito lo spazio degli Operatori Differenziali Lineari delprimo ordine, Der(m), su C∞(Rm;R):
D ∈ Der(m) ⇐⇒
D : C∞(Rm;R) −→ C∞(Rm;R)
f(x) 7−→ D(f)(x) =∑m
i=1
(Xi
∂∂xif)
(x).
Con altri simboli (derivata di Lie), Df = LXf . Un motivo per cui si introduce tale spazioconsiste nella naturale definizione in esso di un prodotto che lo dota di struttura d’Algebra.Cominciamo con l’osservare che dati due operatori differenziali DX =
∑mi=1Xi
∂∂xi, DY =∑m
i=1 Yi∂∂xi
, ha senso valutare(DY , DX
)f := (DY DX −DX DY )f.
Si vede facilmente che quest’ultimo operatore e ancora lineare e del primo ordine, infatti:
(DY DX)f =m∑j=1
Yj∂
∂xj
m∑i=1
Xi∂
∂xif =
m∑i,j=1
Yj∂Xi
∂xj
∂
∂xif +
m∑i,j=1
YjXi∂2
∂xj∂xif,
183

vale un analogo sviluppo per (DX DY )f , e dal teorema di Schwarz (commutazione dellederivate seconde) si ottiene
(DX , DY
)f = (DY DX −DX DY )f =
m∑i=1
( m∑j=1
Yj∂Xi
∂xj−
m∑j=1
Xj∂Yi∂xj
) ∂
∂xif.
Se ora definiamo in V ett(Rm) il seguente prodotto, detto Parentesi di Lie,
[Y,X]i :=
m∑j=1
Yj∂Xi
∂xj−
m∑j=1
Xj∂Yi∂xj
,
allora la biiezione (V ett(Rm),+, [., .]
)−→
(Der(m),+,
(., .))
X 7−→ D =∑m
i=1Xi∂∂xi
e un isomorfismo d’algebra (il prodotto del trasformato e il trasformato del prodotto).
Sia ora m = 2N . Consideriamo in V ett(R2N ) il sottospazio dei campi vettorialiHamiltoniani Ham(R2N )
XH ∈ Ham(R2N ) ⇐⇒ XH = E∇xH, per qualche funzione H ∈ C∞(R2N ;R).
Qui sopra E e la matrice simplettica base –vedi il capitolo della meccanica Hamiltoniana etrasformazioni canoniche–
E =
(O I−I O
).
Inoltre:
x =
(qp
)∈ R2N , ∇x =
(∂∂q∂∂p
).
Dotiamo ora lo spazio delle funzioni Hamiltoniane C∞(R2N ,R) di struttura di prodottomediante le seguenti Parentesi di Poisson,
H,K :=
N∑i=1
(∂H∂qi
∂K
∂pi− ∂H
∂pi
∂K
∂qi
)=(∇xH,E∇xK
),
e dunque di struttura d’algebra. La definizione data e tale per cui la mappa(C∞(R2N ,R),+, ., .
)−→
(V ett(R2N ),+, [., .]
)H 7−→ XH = E∇xH
184

e, pure questa, un anti-morfismo d’algebra:
E∇xH,K = −[E∇xH,E∇xK] (∗)
In conclusione: le strutture algebriche in V ett(Rm) ed in C∞(R2N ) sono struttureereditate dalla “naturale” struttura algebrica degli operatori differenziali del primo ordine.
10.2 Algebra di Lie e Trasformazioni Canoniche
Qui mettiamo in evidenza che lo spazio delle funzioni Hamiltoniane(C∞(R2N ,R),+, ., .
)dotato delle due operazioni somma + e prodotto ., ., e un’algebra di Lie, che, in tuttageneralita, sono caratterizzate dalle seguenti proprieta:
(i) ., . e bilineare: f, g + h = f, g+ f, h eg + h, f = g, f+ h, f,
(ii) f, f = 0, ∀f ∈ C∞,
(iii) vale l’identita di jacobi: f, g, h+ g, h, f+ h, f, g = 0
Si noti che (i) e (ii) implicano1 l’asimmetria: f, g = −g, f, come e nel nostro caso.
Ulteriori importanti proprieta:• Le parentesi di Poisson sono invarianti per trasformazioni canoniche x = x(y) (qui
al solito scriviamo: J = ∂y∂x):
1p.e., basta fare: 0 = f + g, f + g = g, f+ f, g
185

H, K(y)∣∣y(x)
=(∇yH,E∇yK
)(y)∣∣y(x)
=(ET E∇yH︸ ︷︷ ︸
XH
,E∇yK︸ ︷︷ ︸XK
)(y)∣∣y(x)
=
=(ET JE∇xH︸ ︷︷ ︸
JXH
, JE∇xK︸ ︷︷ ︸JXK
)(x) =
(− JTEJ︸ ︷︷ ︸
cE
E∇xH,E∇xK)
(x) =
= c(∇xH,E∇xK
)(x) = cH,K(x)
• L’insieme degli integrali primi di un sistema Hamiltoniano e una sotto-algebra (chiu-sa) di Lie: infatti, f e integrale primo per XH := E∇xH se
LXHf = ∇xf ·XH = ∇xf · E∇xH = f,H = 0
Ora, se f e g sono integrali primi per XH , allora lo e pure ogni loro combinazioneR-lineare e, per (iii), cosı pure f, g:
LXHf, g = f, g, H = −g,H, f − H, f, g = 0
• Mostriamo l’anti-morfismo d’algebra (∗) utilizzando l’isomorfismo vettori-derivazioni:
E∇xH,K = −[E∇xH,E∇xK].
Ricordiamo che, per ogni funzione a valori reali h, si ha che LXH (h) = −H,h,
[E∇xH,E∇xK](h) = [XH , XK ](h) = LXH (LXK (h))− LXK (LXH (h)) =
= h,K, H − h,H,K =
utilizzando l’identita di Jacobi,
= h,K, H+ H,K, h+ K,h, H =
= H,K, h = −XH,K(h).
• (Un aspetto del) Teorema di Nother in ambiente Hamiltoniano:Supponiamo che l’Hamiltonano H sia invariante rispetto al flusso generato da una
funzione (Hamiltoniana) f , cioe,
0 = LXfH = H, f = −LXHf
dunque tale simmetria implica l’esistenza di un integrale primo, che e esattamente lafunzione Hamiltoniana f .
186

10.3 Significato dinamico delle parentesi di Lie
Ad ogni campo vettoriale X ∈ V ett(Rm) resta associato un operatore differenziale delprimo ordine D, e cosı pure un’equazione differenziale autonoma in Rm,
x = X(x).
In relazione a quest’ultima interpretazione dei campi vettoriali il seguente teoremamette in evidenza un significato dinamico della struttura d’algebra assegnata dalle Parentesidi Lie [., .] in V ett(Rm).
Teorema. I flussi di due campi vettoriali X e Y siano definiti ∀t ∈ R,
ΦtX : Rm −→ Rm, Φt
Y : Rm −→ Rm,
d
dtΦtX(x) = X(Φt
X(x)),d
dtΦtY (x) = Y (Φt
Y (x)).
Allora ∀t, s ∈ R, i flussi commutano se e solo se le Parentesi di Lie sono identicamentenulle,
ΦtX Φs
Y − ΦsY Φt
X ≡ 0 ⇐⇒ [X,Y ] ≡ 0.
Prova. La traccia di dimostrazione che segue e tratta sostanzialmente da Arnol’d, MetodiMatematici della Meccanica Classica, p.208. Fissiamo un arbitrario x ∈ Rm e calcoliamolo sviluppo di Taylor arrestato al second’ordine di
φ(t, s) :=(
ΦtX Φs
Y − ΦsY Φt
X
)(x).
φ(t, s) = φ(0, 0) +∂
∂tφ(t, s)|(0,0)t+
∂
∂sφ(t, s)|(0,0)s+
+1
2
∂2
∂2tφ(t, s)|(0,0)t
2 +1
2
∂2
∂2sφ(t, s)|(0,0)s
2 +∂2
∂t∂sφ(t, s)|(0,0)ts+O
((t2 + s2)
32).
Dalla definizione di φ(t, s) segue subito che φ(0, s) = 0 = φ(t, 0), ∀t, s, cosicche
φ(0, 0) = 0,∂∂tφ(t, s)|(0,0) = 0,∂∂sφ(t, s)|(0,0) = 0,∂2
∂2tφ(t, s)|(0,0) = 0,
∂2
∂2sφ(t, s)|(0,0) = 0.
Dettagliamo il termine contenente le derivate seconde miste.
∂2
∂t∂sφ(t, s)|(0,0) =
∂
∂t
∂
∂s
(ΦtX Φs
Y − ΦsY Φt
X
)(x)|(t,s)=(0,0) =
187

=∂
∂s
( ∂∂t
(ΦtX Φs
Y (x))|t=0
)|s=0 −
∂
∂t
( ∂∂s
(ΦsY Φt
X(x))|s=0
)|t=0 =
=∂
∂s
(X(ΦsY (x)
))|s=0 −
∂
∂t
(Y(ΦtX(x)
))|t=0,
La componente i-esima risulta:∂2
∂t∂sφi(t, s)|(0,0) =
=m∑j=1
Yj∂Xi
∂xj−
m∑j=1
Xj∂Yi∂xj
= [Y,X]i(x).
Lo sviluppo di Taylor risulta infine:
φ(t, s) =(
ΦtX Φs
Y − ΦsY Φt
X
)(x) = [Y,X](x) ts+O
((t2 + s2)
32
).
Questa formula ci dice che se i flussi commutano allora necessariamente le parentesi sononulle. Viceversa, osserviamo che se le parentesi sono nulle, allora localmente (cioe, a menodi O(3) ) i flussi commutano. Il prossimo passo consistera nel mostrare che effettivamentetale commutazione dei flussi e globale, cioe vale per tempi finiti t e s. Nel piano dei tempi,asse-t × asse-s, fissiamo un arbitrario punto (t, s), scegliamo un numero (grande) interoN ∈ N, e consideriamo il seguente reticolo di N2 rettangolini di lati t
N e sN ,
tt/N
s
s/N
O
A
B
(t,s)
A partire da x, dal percorso ΦtX Φs
Y (prima si evolve in “verticale” col flusso di Yper un tempo s, poi in “orizzontale” col flusso di X per un tempo t) al percorso Φs
Y ΦtX ,
ci sono esattamente N2 percorsi che differiscono, l’uno dall’altro, contiguamente, per unrettangolino come in figura.
Consideriamo due generici percorsi contigui come quelli anneriti in figura. Da O adA i due percorsi sono equivalenti. Dal punto x evolviamo in un punto y. All’uscita dal
188
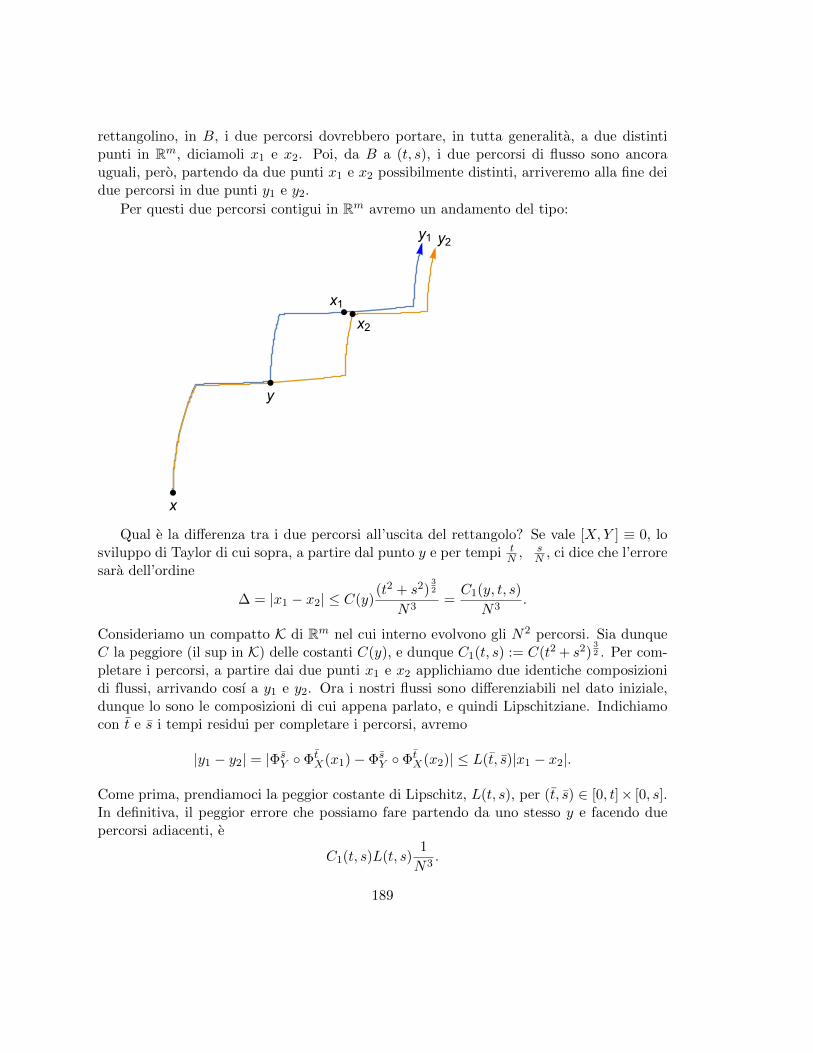
rettangolino, in B, i due percorsi dovrebbero portare, in tutta generalita, a due distintipunti in Rm, diciamoli x1 e x2. Poi, da B a (t, s), i due percorsi di flusso sono ancorauguali, pero, partendo da due punti x1 e x2 possibilmente distinti, arriveremo alla fine deidue percorsi in due punti y1 e y2.
Per questi due percorsi contigui in Rm avremo un andamento del tipo:
y1 y2
x
y
x1x2
Qual e la differenza tra i due percorsi all’uscita del rettangolo? Se vale [X,Y ] ≡ 0, losviluppo di Taylor di cui sopra, a partire dal punto y e per tempi t
N ,sN , ci dice che l’errore
sara dell’ordine
∆ = |x1 − x2| ≤ C(y)(t2 + s2)
32
N3=C1(y, t, s)
N3.
Consideriamo un compatto K di Rm nel cui interno evolvono gli N2 percorsi. Sia dunqueC la peggiore (il sup in K) delle costanti C(y), e dunque C1(t, s) := C(t2 + s2)
32 . Per com-
pletare i percorsi, a partire dai due punti x1 e x2 applichiamo due identiche composizionidi flussi, arrivando cosı a y1 e y2. Ora i nostri flussi sono differenziabili nel dato iniziale,dunque lo sono le composizioni di cui appena parlato, e quindi Lipschitziane. Indichiamocon t e s i tempi residui per completare i percorsi, avremo
|y1 − y2| = |ΦsY Φt
X(x1)− ΦsY Φt
X(x2)| ≤ L(t, s)|x1 − x2|.
Come prima, prendiamoci la peggior costante di Lipschitz, L(t, s), per (t, s) ∈ [0, t]× [0, s].In definitiva, il peggior errore che possiamo fare partendo da uno stesso y e facendo duepercorsi adiacenti, e
C1(t, s)L(t, s)1
N3.
189

Dunque l’errore complessivo di commutazione dei due flussi sara stimato come N2 volte(perche N2 sono i percorsi a due a due contigui) l’errore appena valutato:
∆Totale ≤ C1(t, s)L(t, s)1
N3N2 = C1(t, s)L(t, s)
1
N,
e questa costruzione vale per qualunque N grande ad arbitrio: l’errore e nullo.
10.4 Formula di Lie-Trotter-Chernov
Consideriamo il campo vettorialeX + Y
e l’equazione differenziale associata:
x = X(x) + Y (x).
E’ possibile calcolare il flusso relativo a X + Y conoscendo i flussi associati a X e Y ?La seguente formula, tra l’altro molto utile nella teoria dei cammini di Feynman (il
“path integral”), e vera non appena i vari oggetti matematici che la compongono siano bendefiniti:
ΦtX+Y (x) = lim
n→+∞
(Φ
tnX Φ
tnY
)n(x).
Nel caso in cui i due campi vettoriali X e Y commutino, [X,Y ] = 0, allora la formula sisemplifica in
ΦtX+Y (x) =
(ΦtX Φt
Y
)(x).
Nel caso lineare, x = Ax+Bx, ritroviamo un risultato noto: [X,Y ] = 0 e equivalente allacommutazione delle matrici AB = BA, e vale il morfismo tra la struttura additiva e lamoltiplicativa dell’algebra delle matrici data dall’esponenziale di matrice. Dunque:
ΦtX+Y (x) = e(A+B)tx = eAteBtx =
(ΦtX Φt
Y
)(x).
10.5 Derivata di Lie di Campi Vettoriali
In questo e nel prossimo paragrafo penseremo i nostri oggetti geometrici definiti su unavarieta m−dimensionale M , generalizzando cosı l’ambiente in cui ci siamo finora mossi,Rm.
Appare subito chiara e di immediata interpretazione geometrica la derivata di Lie diuna funzione scalare f : M → R rispetto ad un campo vettoriale
X : M → TM,(
in carte locali : xi 7→ (xi, Xj(x))).
190

Questa e la funzione scalare
(LX f)(x) := (Xi∂
∂xif)(x).
Il significato e appunto quello di derivata di f lungo il flusso di X.Dato un campo vettoriale
Y : M → TM,
quale una corretta definizione di derivata di Lie di Y rispetto a X? Se andiamo arianalizzare LX f notiamo che
(LX f)(x) =d
dλ[f(Φλ
X(x))]|λ=0 =d
dλ[(Φλ
X)∗f ](x)|λ=0.
Questo richiamo del pull-back e essenziale per la definizione di derivata di un campo vet-toriale Y rispetto al flusso del campo vettoriale X; infatti, le operazioni vettoriale di“rapporto incrementale”, e poi di limite per λ → 0, devono essere fatte tutte nello stessospazio vettoriale tangente.
Definiamo:
(LXY )(x) := limλ→0
[(ΦλX)∗Y ](x)− Y (x)
λ=
d
dλ[(Φλ
X)∗Y ](x)|λ=0.
Consideriamo il dettaglio in carte locali di tale espressione.
(LXY )i(x) =d
dλ(∂Φλ
X
∂x)−1Y (Φλ
X(x))i|λ=0,
richiamiamo ora che
ΦλX(x) = x+X(x)λ+O(λ2), (Φλ
X)−1(x) = x−X(x)λ+O(λ2),
quindi il precedente conto continua cosı:
d
dλ(I− ∂X
∂x(x)λ+ ...)Y (x+X(x)λ+ ...)i|λ=0 =
= −∂Xi
∂xj(x)Yj(x) +
∂Yi∂xj
(x)Xj(x) = [X,Y ]i(x),
ove [X,Y ] sono le parentesi di Lie dei campi vettoriali X e Y . Riassumendo:
LXY = [X,Y ].
191

10.6 Cenni sulla Teoria delle Perturbazioni dei Sistemi Ha-miltoniani
10.6.1 Sistemi Hamiltoniani integrabili
Supponiamo che il sistema Hamiltoniano definito dall’Hamiltoniana
h : T ∗RN (∼ R2N )→ R
sia dinamicamente risolubile, cioe il suo diagramma di fase sia completamente noto, ilflusso associato sia esplicitamente calcolabile a meno di operazioni analitiche elementari:inversioni di funzioni e calcolo di primitive di integrali. Questa situazione non e certola norma nei sistemi differenziali, anzi, e l’eccezionalita. In meccanica Hamiltoniana talisistemi speciali si catalogano con il teorema di Liouville-Arnol’d –vedi Metodi Mat.della Meccanica Classica, cap. X–, si dicono integrabili, e si caratterizzano dal fatto dipossedere N integrali primi fi, i = 1, ..., N in involuzione, cioe fi, fj = 0, e tali per cui gliinsiemi di livello di T ∗RN dati da fi(x) = ci sono delle sottovarieta connesse e compatte N -dimensionali di T ∗RN . (Una situazione un po’ piu generale del caso compatto e trattata inMMMC). Ne risulta (tesi del teorema di Liouville-Arnol’d): per fissati c1, . . . , ci, . . . , cN , levarieta fi(x) = ci, i = 1, . . . , N sono diffeomorfe a tori N -dimensionali TN = S1×...×S1;piu precisamente, esiste una trasformazione canonica uni-valente che fibra localmente T ∗RNin tori, piu precisamente, per qualche aperto B ⊂ RN e per qualche U ⊂ T ∗RN esiste unatrasformazione canonica y = y(x),
T ∗RN ⊃ U 3 x 7→ y(x) = (ϑ1, ..., ϑN , I1, ..., IN ) ∈ TN × B,
ed e tale che la nuova Hamiltoniana k(y) = h(x(y)) dipende (al piu) dalle azioni I1, ..., IN ,
k(y) = h(x(y)) = k(I1, ..., IN ).
In tali nuove coordinate simplettiche, dette di Angolo-Azione, y = (q, p) = (ϑ, I) in U ⊂T ∗RN l’integrazione e banale:
ϑi =∂k
∂Ii(I) =: ωi(I), Ii = − ∂k
∂ϑi= 0,
ondeIi(t) = Ii, ϑi(t) = ϑi + ωi(I)t,
si tratta dunque di rotazioni uniformi nel toro individuato da I = I ∈ B, con pulsazioni(frequenze) ωi(I). Si noti come gli originali integrali primi fi siano ora rappresentati dalleazioni Ii.
Tutti i sistemi che si lasciano integrare col metodo di Hamilton-Jacobi cadono in questaclassificazione: per esempio, oscillatori armonici N -dimensionali, problema newtoniano adue-corpi.
192

10.6.2 Perturbazioni
E’ di cruciale interesse fisico conoscere, saper esplorare, cosa accade vicino ai sistemi in-tegrabili. Si pensi al classico problema di meccanica celeste del sistema planetario solare.Ogni sotto-sistema sole-pianeta e un problema a due-corpi, dunque integrabile, con unacostante di accoppiamento nella forza gravitazionale proporzionale a (massa-sole)×(massa-pianeta). Se si trascurano le interazioni pianeta-pianeta il sistema planetario e la com-posizione priva di accoppiamento di n problemi a due corpi, dunque integrabile. E nelcaso compatto, quale quello che apparentemente stiamo vivendo, l’integrazione e ben nota.Sembra lecito chiederci se le trascurate interazioni pianeta-pianeta non possano, in tempilunghi, distruggere, o, meno catastroficamente, mutare l’attuale struttura topologica delleorbite del sistema planetario cosı descritto. Le costanti di accoppiamento per tali perturba-zioni sono dell’ordine (massa-pianeta)×(massa-pianeta), cosicche le costanti perturbativerelative sono dell’ordine di ε ≈ (massa-pianeta)/(massa-sole)(=10−3 per Giove).
Ancora, consideriamo un cristallo la cui dinamica piu o meno ordinata delle molecolenei nodi di un reticolo cristallino puo essere descritta mediante delle forze elastiche, magariin prima approssimazione, e questo generera un sistema Hamiltoniano, a molti gradi diliberta, di tipo oscillatori armonici disaccoppiati e dunque integrabile, h(I) = ω · I. Alcuneteorie di calore specifico nei solidi usano modelli descrittivi di questo tipo. Anche quie decisamente lecito chiederci se i termini non lineari e le eventuali impurita cristallinepossano distruggere o modificare sensibilmente la forte stabilita del modello integrabile.
In entrambi i (macro- e micro-) casi accennati la situazione e del seguente tipo, nellecoordinate angolo-azione ottenute dall’iniziale imperturbato sistema integrabile,
H(ϑ, I) = h(I) + εf(ϑ, I),
dove ε misura l’ordine, l’intensita della perturbazione e in generale poco o nulla si saintorno a f(ϑ, I) (naturalmente nei casi generali diversi da quelli sopra descritti). Finchenon ci serviranno strettamente le coordinate angolo-azione, useremo coordinate generalix ∈ T ∗RN e considereremo tutta la regolarita che ci serve per le funzioni in gioco h, f ,eventualmente anche Cω, cioe l’analiticita. Le orbite del sistema perturbato
x = E∇(h+ εf)(x)
sono topologicamente equivalenti a quelle del sistema imperturbato x = E∇h(x), alme-no per piccoli ε vicini a zero, se esiste una trasformazione canonica, vicina all’identitaper ε vicino a zero, tale da mutare l’Hamitoniana perturbata h + εf nell’Hamiltonianaimperturbata h. Se questo accadesse per ogni ε vicino a zero, |ε| << 1, allora il siste-ma perturbato sarebbe esso stesso integrabile e avremmo cosı mostrato l’equivalenza delsistema perturbato col sistema imperturbato, anzi ne avremmo dimostrato una sorta distabilita strutturale per l’originario sistema x = E∇h(x) (non ci addentreremo nell’uso diquest’ultima terminologia perche richiederebbe troppe nozioni ausiliarie per la sua forma-lizzazione). Questa ε-famiglia di trasformazioni canoniche la cercheremo tra i flussi dei
193

sistemi Hamiltoniani autonomi ove ε assumera il ruolo del parametro di evoluzione: questoe un punto fondamentale della costruzione, che utilizza e motiva ulteriormente la teoria for-male delle trasformazioni canoniche. Va pure messo in evidenza che questo e in ogni caso unparticolare, tra i tanti disponibili in letteratura, approccio alla teoria delle perturbazioni.Cercheremo dunque x = x(ε, y) tale che x(0, y) = y e
∂x
∂ε(ε, y) = E∇g(x(ε, y)),
per qualche funzione Hamiltoniana g da determinarsi. Dunque il nostro programma sarebberisolto se risultasse
(h+ εf)(x(ε, y)) = h(y).
In generale, cio non sara ovviamente possibile. Ci accontenteremo di procedere per passiperturbativi nel seguente senso: sviluppiamo nel parametro ε, in ε = 0, il primo membrodella precedente equazione,
(h+ εf)(x(ε, y)) = h(y) +∇h(y)∂x
∂ε(ε, y)|ε=0ε+ f(y)ε︸ ︷︷ ︸
=0: equazione di H-J
+o(ε).
Notiamo che se la funzione Hamiltoniana g(y) risolve l’equazione lineare alle derivate par-ziale del primo ordine (e di tipo Hamilton-Jacobi, compare solo il gradiente della funzioneincognita):
∇h(y)E∇g(y) + f(y) = 0,
allora la trasformazione canonica data dal flusso del sistema Hamiltoniano associato all’Ha-miltoniana g muta h(y)+εf(y) in h(y)+R(ε, y), ove R(ε, y) = o(ε). Se dunque l’equazionedi cui sopra fosse risolubile, allora avremmo spostato la perturbazione dall’ordine ε1 ad unordine strettamente maggiore di uno. Piu precisamente, vedremo tra breve –vedi piu sotto–che il guadagno sara senz’altro ad un ordine maggiore di 1, ma, nelle particolari scelte deiparametri in gioco qui fatte, strettamente minore di 2: cioe, da ε a ε2√
ε= ε
32 .
10.6.3 Frequenze Diofantee: Convergenza del primo passo perturbativo
Condizione necessaria per compiere almeno un numero finito di passi perturbativi e larisolubilita [l’inversione] dell’equazione [dell’operatore] di cui sopra. Riscriviamo in angolo-azione. La nostra equazione ∇hE∇g + f = 0, cioe h, g + f = 0 diventa (ωl(I) =∂h∂Il
(I)):
ωl(I)∂g
∂ϑl(ϑ, I) = f(ϑ, I).
Supponendo l’analiticita per f ,
f(ϑ, I) =∑k∈ZN
fk(I)eik·ϑ,
194

vale allora per i coefficienti di Fourier una stima (accettiamola, e standard) del tipo
|fk(I)| ≤ c e−σ|k|, c, σ > 0, ∀I ∈ B.
Cercheremo g pure tra le funzioni analitiche della stessa forma di f ; l’equazione diventa,componente per componente (di Fourier),
iω(I) · k gk(I) = fk(I).
Per ovvi motivi di compatibilita supporremo f0(I) :=∫TN f(ϑ, I)dϑ = 0, cioe perturbazioni
a media nulla sui tori.Occupiamoci della perturbazione di oscillatori armonici: in questo caso h(I) = ω · I, le
frequenze sono indipendenti dalle azione. La nostra equazione e dunque risolta da
gk(I) = −ifk(I)
ω · kse le frequenze non sono risonanti, cioe se sono Z−indipendenti:
ω · k 6= 0 ∀k ∈ ZN \ 0.
Non e affatto detto che questa sola condizione di non risonanza garantisca la convergenzadella serie di Fourier per
g(ϑ, I) =∑k∈ZN
gk(I)eik·ϑ
per qualche sottosuccessione N 3 m 7→ km ∈ ZN il prodotto scalare ω ·km potrebbe tenderea zero molto velocemente: e il cosiddetto problema dei piccoli divisori. Abbiamo bisogno diun’ipotesi piu forte della non risonanza sulle ωl, e che sia realistica, fisicamente utilizzabile.Tale nuova ipotesi consiste nella richiesta che il vettore frequenze ω ∈ RN sia diofanteo,piu precisamente, per qualche α, β > 0, ω sia tale per cui
|ω · k| ≥ α
|k|β∀k ∈ ZN − 0.
In tal caso
|gk| ≤|fk||ω · k|
≤ c |k|βe−σ|k|
α≤ c e−σ|k|,
per qualche c, σ > 0, σ ≤ σ. Stima questa che ci garantisce la convergenza della serieformale di Fourier per g e quindi di aver realizzato un passo perturbativo.
Ma quali sono le ragionevoli α e β che si possono fisicamente richiedere nella teoria?La condizione diofantea e tanto meno severa sulle ω quanto piu α e piccolo e β e grande.
Inoltre, e sempre meno significativa all’aumentare della norma |k|.Dovremo scegliere α piccolo, ma non “troppo”, visto che compare a denominatore nella
serie per g, e β? Consideriamo in RN la palla di centro ω = 0 e di raggio L fissato,
195

indichiamola con BL. Indichiamo con BL,α,β l’insieme delle ω (α, β)−diofantee che stannoin BL.
Si dimostra (per esempio in P. Lochak, C. Meunier: Multiphase averaging for classicalsystems, Applied Math. Sciences 72, Springer) che:
la misura di Lebesgue in RN di BL \BL,α,β va a zero con α se β > N − 1.
Cosı, scegliendo β = N , la misura (il “volume” N -dimensionale) delle frequenze che “nonvanno bene” in BL e piccola con α, parametro che pero non posso schiacciare a zero,pena la non convergenza della serie. Naturalmente non e neppure possibile aumentareindiscriminatamente β dato l’ovvio conseguente peggioramento della convergenza.
Si dimostra anche che tale insieme “cattivo” BL \ BL,α,β e denso in BL. Tale comporta-mento non deve stupire: si pensi per esempio ai razionali presenti nell’intervallo reale [0, 1],questi sono un’infinita numerabile (n = 1, 2, ...) e possono essere ricoperti da intervallini diampiezza αn, la somma di tali ampiezze vale α
1−α ; questo e il procedimento standard permostrare che i razionali sono di misura nulla in [0, 1]: ciononostante i razionali (l’analogodelle frequenze risonanti), e dunque l’unione di tali intervallini (che in questo ragionamentomodellizzano l’insieme BL \BL,α,β), sono un insieme denso in [0, 1] .
Da quanto delineato, una scelta ragionevole per α e β, ma limitatamente ad un passoperturbativo, potrebbe essere:
α =√ε, β = N.
Pensando alla stima sulle gk si deduce che anche il resto R dipendera dal reciproco di α,dunque un passo perturbativo spostera la perturbazione d’ordine ε ad una perturbazioned’ordine ε2√
ε= ε√ε.
Il significato operativo di tale passo perturbativo e il seguente: nelle nuove coordinateangolo-azione si ha subito che |I| ≤ cε
√ε, dunque le azioni I restano
√ε-limitate in un
intervallo di tempo dell’ordine di 1ε : se non avessimo operato la trasformazione avrem-
mo riconosciuto dalle equazioni di Hamilton che le azioni I restavano√ε-limitate per un
intervallo molto piu breve, dell’ordine di 1√ε.
A questo punto si potrebbe pensare di iterare il procedimento. L’aspetto fondamentaledi tale tentativo e che, ancora una volta, abbiamo da risolvere un’equazione di alle derivateparziale H-J del precedente tipo, con lo stesso operatore principale g 7→ ∇hE∇g. E’centrale il problema della stima dei resti Rk(ε, y): in generale le stime note portano allanon convergenza dello schema, una situazione ben nota fin da Poincare. Il teorema diKolmogorov-Arnol’d-Moser (K.A.M.) risponde alla questione riguardanti la convergenzadegli schemi perturbativi del tipo sopra brevemente descritto e piu generali. Ma la non-convergenza non e sempre drammatica: una stima abbastanza ragionevole mostra che(qui qualche coefficiente e semplificato per esigenze didattiche) il resto all’n−esimo passoperturbativo e dell’ordine di
|Rn(I, ϑ)| ≤ c n! εn.
196
Naturalmente la crescita fattoriale depone a favore della non convergenza della successionedei passi perturbativi. Ciononostante una stima Stirling del fattoriale, n! ≈ nne−n, cisuggerisce di operare fino ad un numero n∗ = [1
ε ] di passi ([...]:=“parte intera”); in talcaso:
|Rn| ≤ c n∗! εn∗ ≈ c (n∗ε)n
∗e−
1ε ≈ c e−
1ε .
Otteniamo un risultato formidabile: una stima esponenziale, del tipo trattato nel teoremadi Nekhoroshev, dell’andamento delle azioni: abbiamo che |I| ≤ c e−
1ε , e dunque le azioni I
restano√ε-limitate in un intervallo di tempo esponenzialmente lungo, dell’ordine di
√ε e
1ε .
L’utilita pratica e evidente: tale risultato ci dice che le azioni sono degli integrali primi√ε-approssimati per intervalli di tempo T , che per ragionevolmente piccoli ε facilmente
raggiungono (e ben superano) l’eta dell’Universo; per esempio, per ε dell’ordine di 10−5, siha T ≈ 10−5/2e105
sec.
197

198

Capitolo 11
Cenno sull’analisi qualitativa dellospazio delle fasi
11.1 Teoremi del Trasporto e di Liouville
Sia
(1) x(t) = X(x(t))
l’equazione differenziale di un sistema meccanico; per esempio: la riduzione al primo ordinedi un sistema Lagrangiano, in tal caso x = (q, q) ∈ R2N , oppure possiamo pensare x(t) =X(x(t)) come ad un sistema Hamiltoniano e in tal caso x = (q, p) ∈ R2N (spazio dellefasi). Supponiamo che l’equazione differenziale in studio ammetta flusso con estensionemassimale su tutta la retta reale dei tempi. Indichiamo tale operatore flusso con:
Φ : R× R2N → R2N
(2) (t, y) 7→ Φty := x(t, y),
oved
dtx(t, y) = X(x(t, y)) e x(0, y) = y.
Vale Φt2 Φt1 = Φt1+t2 , e (Φt)−1 = Φ−t (teorema di unicita); e chiaro che Φt : R2N → R2N e
noto se, equivalentemente, sappiamo risolvere i problemi di Cauchy: x(t) = X(x(t)), x(0) = y,∀y ∈ R2N , che e estremamente difficile, e, in un certo senso, non significativo: l’insiemedei sistemo dinamici che si lasciano integrare mediante tecniche standard, quali calcolo diprimitive e inversioni di funzioni (si parla, appunto, di ‘sistemi integrabili’, il cui prototiponon lineare e x = f(x)) e estremamente ‘piccolo’ in ogni ragionevole topologia.
Sia Ω ⊂ R2N un sottoinsieme misurabile ed interpretiamolo come un insieme di pos-sibili “dati iniziali” per la nostra equazione differenziale. Cerchiamo allora di indagare
199

su un aspetto meno forte ma, ciononostante, sufficientemente significativo e interessante.Studiamo l’evoluzione della misura (in R2N ) di Ω tramite Φt :
mis (Φt(Ω)) :=
∫Φt(Ω)
dx
Calcoliamo ddtmis (Φt(Ω)) :
d
dt
∫Φt(Ω)
dx =d
dt
∫Ω
∣∣∣∂(x1, . . . , x2N )
∂(y1, . . . , y2N )(t, y)
∣∣∣dySe, come supponiamo, vale per (1) un teorema di esistenza e unicita, allora Φt e iniettivoe posto1
J(t, y) =∂(x1, . . . , x2N )
∂(y1, . . . , y2N )(t, y) =
2N∑h=1
Aih(t, y)∂xi∂yh
(t, y)
si ha che: J(0, y) = 1 e J(t, y) > 0 ∀t ∈ R. Dunque:
d
dt
∫Φt(Ω)
dx =
∫Ω
∂
∂tJ(t, y)dy =
=
∫Ω
2N∑i,j=1
Aij(t, y)∂2xi∂t∂yj
(t, y)dy =
=
∫Ω
2N∑i,j=1
Aij(t, y)∂
∂yj
∂xi∂t
(t, y)dy =
=
∫Ω
2N∑i,j=1
Aij(t, y)∂
∂yjXi(x(t, y))dy =
=
∫Ω
2N∑i,j=1
Aij(t, y)
2N∑k=1
∂Xi
∂xk(x(t, y))
∂xk∂yj
(t, y)dy,
1Aih: complemento algebrico della matrice Jacobiana
200

ricordando che∑2N
j=1Aij∂xk
∂yj= δikJ , si ottiene:
(3)d
dt
∫Φt(Ω)
dx =
∫ΩJ(t, y)
2N∑i=1
∂Xi
∂xi(x(t, y))dy.
Com’e noto: divX :=∑2N
i=1∂Xi
∂xi(operatore “divergenza”).
Infine ritornando alle variabili x, otteniamo:
(4)d
dt
∫Φt(Ω)
dx =
∫Φt(Ω)
divX(x)dx (Teorema del Trasporto).
Supponiamo ora che l’equazione (1) sia lineare,
(5) Xi(x) =2N∑j=1
Aijxj (Aij : matrice reale costante 2N × 2N)
In tal caso divX =∑2N
i=1Aii = trA (tr: traccia), allora la (4) diviene:
(6)d
dt
∫Φt(Ω)
dx = trA
∫Φt(Ω)
dx.
La (6) si integra facilmente:
(7) mis(Φt(Ω)) = mis(Ω)et(trA).
Dunque il segno della traccia di A ci da una indicazione sul modo con cui le traiettorieuscenti da Ω “invadono” (trA > 0) o meno (trA < 0) lo spazio delle fasi R2N .
Dalla (7) si puo dedurre, come corollario,
(8) det(eA) = etrA.
Infatti
mis(Φt(Ω)) =
∫Φt(Ω)
dx =
∫etAΩ
dx =
=
∫ΩJ dy =
∫Ω
det(etA)dy = det(etA)
∫Ωdy = det(etA) mis(Ω),
confrontando con (7) e per t = 1 otteniamo (8).
Consideriamo ora la (4) nel caso che x(t) = X(x(t)) sia un sistema Hamiltonianox = (q1, . . . , qN , p1, . . . , pN ) :
(9)
qi = ∂H∂pi
(q(t), p(t))
pi = −∂H∂qi
(q(t), p(t)), i = 1, . . . , N.
201

Calcoliamo la divergenza del campo vettoriale:
div X =
2N∑h=1
∂Xh
∂xh=
N∑i=1
∂
∂qiXi +
N∑i=1
∂
∂piXN+i =
=N∑i=1
∂
∂qi
(∂H
∂pi
)+
N∑i=1
∂
∂pi
(−∂H∂qi
)=
=N∑i=1
∂2H
∂qi∂pi−
N∑i=1
∂2H
∂pi∂qi,
se H ∈ C2, vale divX ≡ 0, dunque nel caso Hamiltoniano dalla (4) si ha:
(10)d
dt
∫Φtw(Ω)
dx ≡ 0,
cioe:Teorema di Liouville Il flusso associato alle equazioni canoniche di Hamilton mappanello spazio delle fasi R2N misurabili Ω in misurabili Φt(Ω) di ugual misura.
11.2 Teorema del Ritorno di Poincare
Consideriamo un sistema Hamiltoniano con H(q, p) indipendente dal tempo. Sappiamoche la funzione Hamiltoniana H e un integrale primo del moto: H(q(t), p(t)) = E = cost.se (q(t), p(t)) risolve (9). Supponiamo che le superfici di livello (nello spazio delle fasi R2N )ΣE ,
(1) ΣE := x = (q, p) ∈ R2N : H(x) = E
per E : E0 ≤ E ≤ E1 , siano limitate, dunque compatte. Quest’ipotesi e certamentesoddisfatta se la funzione Hamiltoniana e una mappa propria. In questa ipotesi, fissatiE0 < E1, l’insieme (detto energy shell)2
(2) ΩE0,E1 := x ∈ R2N : E0 ≤ H(x) ≤ E1
e un sottoinsieme compatto di R2N , e quindi di misura (il “volume” 2N–dimensionale)finita:
(3) mis(ΩE0,E1) < +∞.2possiamo pensare a E0, E1 molto vicini tra loro, ma non coincidenti: in questo modo teniamo in conto
l’indeterminazione, numerica, sperimentale, nel precisare ‘esattamente’ il livello energetico su cui studiamoil sistema dinamico.
202

Sotto queste ipotesi il flusso Φt rappresenta un diffeomorfismo di ΩE0,E1 in se, ∀t ∈ R (lesoluzioni restano definitivamente intrappolate in ΩE0,E1).
Teorema del Ritorno (H. Poincare).
Consideriamo un sistema Hamiltoniano come appena descritto. Per quasi tutti (nel sensodella misura) i punti x ∈ ΩE0,E1, sottoinsieme invariante (cioe: ΦtΩE0,E1 = ΩE0,E1) ecompatto dello spazio delle fasi R2N , fissato ad arbitrio ε > 0 e T > 0 esiste un tempot(y, ε, T ) ≥ T tale che
‖Φtx− x‖R2N < ε
cioe, il moto dei sistemi Hamiltoniani, indipendenti dal tempo, sui sottoinsiemi invariantie compatti dello spazio delle fasi, e quasi–periodico.
Prova. Sia y ∈ΩE0,E1 e sia B = B(y, ε2) la palla di centro y e raggio ε
2 , ε > 0. Consemplice argomento di compattezza, ricopriamo ΩE0,E1 con un numero finito di tali palle.Sia T > 0 reale arbitrario e sia N ⊆ B
(4) N := x ∈ B ∩ ΩE0,E1 : ΦnTx ∩B = ∅ , n = 1, 2, . . .
l’insieme dei punti x di B che, sotto l’azione del flusso Φt con tempo discretizzato t =T, 2T, 3T, . . . , non ritornano in B. Per la tesi basta dimostrare che, comunque scegliamoT > 0, misN = 0. Dalla (4) si ha
∀x ∈ N : ΦnTx 6∈ B n = 1, 2, 3, . . . ,
in particolare, dato che N ⊆ B ,
(5) ∀x ∈ N : ΦnTx 6∈ N n = 1, 2, 3, . . . ;
questo significa che
(6) ΦnTN ∩N = ∅ n = 1, 2, 3, . . . .
Mostriamo che gli iterati
ΦTN, Φ2TN, Φ3TN, . . . , ΦnTN, . . .
sono tutti tra loro disgiunti. Prima ricordiamo che la proprieta che Φt : ΩE0,E1 → ΩE0,E1
sia un diffeomorfismo ∀t ∈ R si traduce per ΦnT nella seguente affermazione:
ΦnTx = ΦnT y ⇐⇒ x = y, ∀n ∈ N,
inoltre dalla proprieta di flusso
(ΦnT )−1 = Φ−nT .
203

Supponiamo, per assurdo, che x ∈ ΦmTN ∩ ΦnTN 6= ∅ con 1 ≤ m < n; allora
∃! y ∈ N : ΦmT y = x e∃! z ∈ N : ΦnT z = x dunque
ΦnT z = ΦmT y, Φ−mT (ΦnT z) = y, Φ(n−m)T z = y,
abbiamo cosı trovato un punto z ∈ N tale Φ(n−m)T z ∈ N : assurdo.Notiamo che ΦnTN sono (∀n ≥ 1) contenuti in ΩE0,E1 e, dal teorema di Liouville,
mis(ΦnTN) = misN . Dato che mis(ΩE0,E1) < +∞ segue che mis(N) = 0:
mis(⋃+∞n=1 ΦnTN) =
∑+∞n=1mis(ΦnTN) =
∑+∞n=1mis(N) =
= limn→+∞ nmis(N) ≤ mis(ΩE0,E1) < +∞.
Osservazione. Questo teorema crea profondi problemi nella costruzione statistico termodi-namica dei sistemi a molte particelle. Un gas in un serbatoio e in effetti un sistema dimolte particelle (una ‘mole’: circa 1023 particelle) interagenti con interazioni che soddisfa-no azione-e-reazione e che dipendono dalla sola mutua distanza (e dunque conservative),inoltre le pareti del serbatoio possono essere modellizzate da un’ulteriore energia potenzialecon grafico ‘molto ripido’: il sistema e Hamiltoniano e l’Hamiltoniana e propria. Dunque,il sistema e quasi-periodico, come si spiega allora il comportamento termodinamico della‘termalizzazione’, della tendenza all’equilibrio termodinamico?
204
Capitolo 12
Metodo di Newton e SistemiDinamici
12.1 Metodo di Newton
Sia f : Rm −→ Rm una funzione C∞, con det f ′ 6= 0, essa induce pertanto locali diffeomor-fismi. Un classico problema computazionale consiste nella determinazione degli zeri di f .Uno storico metodo algoritmico, famoso per la sua straordinaria velocita di convergenza(quando, naturalmente, converge), e il metodo di Newton.
Sia x0 il punto iniziale della sucessione. Naturalmente supponiamo che f(x0) 6= 0,altrimenti avremmo gia concluso. Costruiamo il termine x1. A tal fine consideriamo lafunzione affine x 7→ y(x) (la “tangente”) approssimante f al primo ordine in x = x0,
y = f(x0) + f ′(x0)(x− x0).
Determiniamo lo zero di questa funzione: lo denoteremo con x1,
0 = f(x0) + f ′(x0)(x1 − x0), onde : x1 = x0 − [f ′(x0)]−1f(x0).
Iteriamo questo procedimento e otteniamo la sucessione:
xn+1 = xn − [f ′(xn)]−1f(xn). (Newton)
Dato che abbiamo richiesto det f ′ 6= 0, se la sucessione converge, essa convergera sicura-mente ad uno zero di f . Se si prova ad abbozzare un disegno per questo procedimentonel caso 1−dimensionale, appare subito ben chiaro perche questo metodo si dica pure delletangenti.
Discutiamo qualche dettaglio sulla convergenza. Piu in generale, si veda per esempioN. S. Bachvalov: Metodi Numerici, Editori Riuniti, pag. 405. Mettiamoci pure nel caso
205

1−dimensionale, m = 1: delle cose che diremo la generalizzazione al caso m−dimensionalesara pura routine tecnica. Definiamo
Φ(x) := x− [f ′(x)]−1f(x).
E chiaro che x∗ e uno zero per f se e solo se x∗ e un punto fisso di Φ(x). Si tratta dunque diricondurci al lemma del contrazioni (vedi De Marco: Analisi Due/1, pag.153). Supponiamoche per un certo intervallo reale I ⊂ R valga
Φ(I) ⊂ I, (a1)
ed inoltre in I si abbia chesupx∈I|Φ′(x)| < 1. (a2)
Queste condizioni ci garantiscono che in I esiste uno ed un unico punto fisso per Φ. Efacile vedere come la condizione (a2) si scrive in termini di f e delle sue derivate prima eseconda:
supx∈I|Φ′(x)| = sup
x∈I|f′′ f
f ′2(x)| < 1.
Sempre rimanendo nell’ambito 1−dimensionale, andiamo a constatare la velocita diconvergenza in I delle sucessioni di Newton. Dal teorema di Taylor si ha che esiste unM > 0 tale che in I vale
|f(y)− f(x)− f ′(x)(y − x)| ≤M |y − x|2.
Usiamola con y = xn+1 e x = xn; ricordando la relazione definente la sucessione di Newton:
|f(xn+1)| ≤M |xn+1 − xn|2,
ricordando ancora la relazione di Newton (al passo successivo) otteniamo:
|f ′(xn+1)(xn+2 − xn+1)| ≤M |xn+1 − xn|2,
pertanto, indicando con K = supx∈I 1/|f ′(x)|, e scrivendo C = KM , otteniamo:
|(xn+2 − xn+1)| ≤ C|xn+1 − xn|2.
E appunto quest’ultima stima responsabile della super-convergenza delle successioni diNewton. In effetti,
|xn+1 − xn| ≤ C|xn − xn−1|2 ≤ C(1+2+22+23+...+2n−1)|x1 − x0|2n
=
= C2n−1|x1 − x0|2n
=(C|x1 − x0|)2n
C.
206
Allora, posto ε := C|x1 − x0|, e supposto ε < 1 (se non lo fosse, basta aspettare qualchepasso e cominciar a numerare da lı), si ha
|xn+k − xn| ≤ |xn+k − xn+k−1|+ |xn+k−1 − xn+k−2|+ ...+ |xn+1 − xn| ≤
≤ 1
C(ε2n+k−1
+ ε2n+k−2+ ...+ ε2n+1
+ ε2n) =
=1
C
[ε2n + (ε2n)2 + (ε2n)22
+ (ε2n)23+ (ε2n)24
+ ...+ (ε2n)2k−1],
per k → +∞ e maggiorando quest’ultima serie “super-geometrica” con la serie geometrica(ε < 1),
|x∗ − xn| ≤ε2n
C(1 + ε2n + (ε2n)2 + (ε2n)3 + ...),
|x∗ − xn| ≤ε2n
C
1
1− ε2n' ε2n
C.
L’algoritmo di Newton, e sue varianti (per esempio il metodo di Kantorovic), e moltousato, per l’ovvio motivo della rapida convergenza, nel calcolo numerico assistito da com-puter. Da un punto di vista teorico, e abbastanza ragionevole pure l’estensione al casoinfinito dimensionale negli spazi di Banach: e talvolta usato per la determinazione di solu-zioni di equazioni differenziali e per inversione di funzioni; pionieristico fu l’uso che ne feceKolmogorov nella sua (prima) versione del teorema centrale della teoria delle perturbazionidei sistemi Hamiltoniani, il teorema KAM.
Fin qui abbiamo discusso intorno all’uso diretto, naturale, del metodo di Newton. Da-remo nel seguito una interessante interpretazione “dinamica” di tale metodo, con risultati(ormai classici) in un certo senso sorprendenti.
12.2 Equazioni alle differenze finite, campo vettoriale di New-ton e stabilita asintotica
Consideriamo l’equazione differenziale associata al campo vettoriale X : Rm −→ Rm,
x = X(x), x(0) = x. (continuo)
Decidiamo di voler calcolare le sue soluzioni in maniera approssimata, sostituendo allavariabile continua indipendente (il “tempo”) t ∈ R con la variabile discreta n ∈ Z; perfissato h > 0 sufficentemente piccolo, la seguente successione iterativamente definita
xn+1 − xnh
= X(xn), x0 = x,
207
approssima la soluzione del problema di Cauchy sopra scritto. Le traiettorie (il supportodelle soluzioni) di x = X(x) sono tutte e sole quelle di x = αX(x), α > 0. Se siamo dunqueinteressati solamente alle traiettorie, potremo considerare la seguente versione discreta (conh = 1) del sistema dinamico soprascritto:
xn+1 = xn +X(xn), x0 = x. (discreto)
Torniamo ora alla successione di Newton. Ragioniamo in senso inverso a quanto orafatto. Data una funzione f : Rm −→ Rm, det f ′ 6= 0, della quale abbiamo scritto lasuccessione di Newton, individuiamo facilmente il campo vettoriale X : Rm −→ Rm di cuila successione ne e la riduzione discreta: XNEWTON(x) := −[f ′(x)]−1f(x). L’equazionedifferenziale associata si scrive:
x = −[f ′(x)]−1f(x).
Ora, si vede che x∗ e uno zero di f se e solo se x∗ e un equilibrio per XNEWTON.
L’uso di tale equazione differenziale e della sua correlazione col metodo di Newton siritrova spesso in letteratura: si veda per esempio in teoria dinamica dei processi economici,S. Smale:“Dynamics in General Equilibrium”, American Economic Review, Vol.66, pp.284-294, (1976).
Come dobbiamo aspettarci sia l’andamento topologico delle curve di tale equazionedifferenziale vicino all’equilibrio x∗?
La congettura piu naturale, data la rapida convergenza sopra descritta delle successionidi Newton, e che l’equilibrio x∗ sia asintoticamente stabile (si veda per esempio N. S.Bachvalov, op. cit., pag. 429). Verifichiamolo. Consideriamo la seguente funzione realeW ,
W (x) := |f(x)|2.
Dimostriamo che, localmente allo zero x∗ di f , W e una funzione di Lyapunov per l’asinto-tica stabilita. In effetti, dato che f e un diffeomorfismo locale, esiste un intorno apertodi x∗ in cui f si annulla solo in x∗, dunque W e definita positiva in tale intorno di x∗.Calcoliamo la derivata di Lie di W rispetto al campo vettoriale XNEWTON:
W (x) = LXNEWTONW (x) = gradRmW (x) · (−[f ′(x)]−1f(x)) =
= −2f(x)f ′(x) · [f ′(x)]−1f(x) = −2W (x),
dunque e localmente definita negativa. Questo e appunto quanto serve per la stabilitaasintotica.
Aspetti dinamici delle successioni di Newton sono studiati in maniera molto stimolante,specialmente per le ottime illustrazioni ottenute con tecniche di computer-graphic, nelvolume: H.-O. Peitgen, P.H. Richter, La bellezza dei Frattali, Bollati Boringhieri, cap.7.
208

12.3 Coniugazione del campo vettoriale di Newton
Propedeuticamente alle Trasformazioni Canoniche, l’argomento delle coniugazioni qui bre-vemente rchiamato, e trattato in maggior dettaglio.
Si consideri un’equazione differenziale in Rm con campo vettoriale
x(t) = X(x(t)).
Il diffeomorfismoRm −→ Rm
(x) 7→ y(x)
si dice che coniuga l’equazione differenziale di cui sopra nell’equazione
y(t) = Y (y(t))
se e solo se trasforma, mediante composizione, tutte le soluzioni dell’una in tutte e solele soluzioni dell’altra. Piu precisamente, x(t) e soluzione della prima se e solo se y(t) :=y(x(t)) e soluzione della seconda equazione differenziale.
Dunque:
Y (y(t)) =d
dty(t) =
∂y
∂x(x(t))
d
dtx(t) =
∂y
∂x(x(t)X(x(t)),
infine:
Y (y)|y=y(x) = y′(x)X(x), oppure Y (y) = y′(x)X(x)]x=x(y). (Coniugazione)
E quindi facile ora vedere che la funzione x 7→ f(x), diffeomorfismo locale attorno a x∗,coniuga il campo vettoriale di Newton XNEWTON nel campo Y (y) = −y:
Y (y) = f ′(x)XNEWTON(x)|x=f−1(y) = −f ′(x)[f ′(x)]−1f(x)|x=f−1(y) = −y.
(Se nel precedente paragrafo avessimo tenuto il passo h diverso da 1, ora il campo vettorialeconiugato sarebbe: Y (y) = −hy, h > 0.)
12.4 Un (altro) teorema di inversione globale
Vediamo ora un’ulteriore applicazione della dinamica associata al campo di Newton co-struito con una funzione f che induce diffeomorfismi locali (det f ′ 6= 0). Supponiamo diaver individuato in x∗ uno zero per f . Vogliamo dare una stima costruttiva dell’intornoaperto Ω di x∗, su cui ristretta f sia un diffeomorfismo; in altre parole, f |Ω sia iniettiva (edunque, per le altre proprieta di f , un diffeomorfismo sull’immagine). Il seguente risultatoe nell’articolo di Gaetano Zampieri, Finding domains of invertibility for smooth functionsby means of attraction basins, J. Differential Equations 104 (1993).
209

Teorema Sia Ω il bacino di attrazione di x∗ per il campo vettoriale
XNEWTON(x) = −[f ′(x)]−1f(x)
Allora f |Ω e iniettiva.Prova. Dire che Ω e il bacino di attrazione di x∗ per −[f ′(x)]−1f(x) significa che, perogni x0 ∈ Ω, limt→+∞ x(t, x0) = x∗, ove naturalmente x(t, x0) e il flusso, la soluzione dix = −[f ′(x)]−1f(x), con x(0, x0) = (x0). La continuita del flusso implica che Ω e aperto.Consideriamo ora due arbitrari distinti punti x1 e x2 di Ω. Mostriamo che f(x1) 6= f(x2).Abbiamo che
limt→+∞
x(t, x1) = x∗, limt→+∞
x(t, x2) = x∗.
Inoltre, per i = 1, 2,
d
dtf(x(t, xi)) = f ′(x(t, xi))−[f ′(x(t, xi))]
−1f(x(t, xi)) = −f(x(t, xi)),
onde:f(x(t, xi)) = e−tf(xi).
Ora per un tempo t sufficentemente grande x(t, xi)), i = 1, 2, sono entrambi in un(“piccolo”) aperto I (in Rm) di x∗ relativo al diffeomorfismo locale indotto dal teoremadella funzione inversa, usando semplicemente det f ′(x∗) 6= 0. Il teorema di esistenza eunicita ci dice che da x1 6= x2 segue che x(t, x1) 6= x(t, x2). Il teorema locale dellafunzione inversa in I ci dice inoltre che
f(x(t, x1)) 6= f(x(t, x2)).
Dunque, l’evoluzione dinamica sopra scritta per f lungo le due soluzioni ci mostra chee−tf(x1) 6= e−tf(x2) ed infine quindi
f(x1) 6= f(x2).
210
Capitolo 13
Vettori Applicati, VelocitaAngolare, Cinematica Relativa
13.1 Vettori Applicati
A,B, ... punti di uno spazio 3-dimensionale A. AB segmento orientato (di origine A edestremo B) detto anche vettore applicato (in A).
AB e CD sono detti equipollenti se (i) sono paralleli, (ii) hanno verso concorde e(iii) hanno ugual lunghezza. Tale relazione e un’equivalenza e le sue classi d’equivalenzasono dette vettori (liberi). Li indicheremo con v, u, w, ... . Talvolta useremo la notazione(A, v) per indicare il vettore applicato in A appartenente alla classe v. (Nell’ambito dellageometria affine, se la terna (A, V,+), V spazio vettoriale, denota uno spazio affine, alloragli elementi di A×V sono i vettori applicati, mentre gli elementi di V sono i vettori liberi).Inoltre spesso si indica con AB anche il vettore libero associato al segmento AB. Cio e veroin particolare quando AB figura in operazioni quali: addizione, prodotto per uno scalare,prodotto scalare, che denoteremo con un puntino ·, prodotto vettoriale, che denoteremocon ∧; la crocetta × e usata in alcuni testi per il prodotto scalare, in altri per il prodottovettoriale: non usandola si evita ogni confusione.
Formule importanti.
v1 ∧ v2 · v3 = v2 ∧ v3 · v1 = v3 ∧ v1 · v2 (1)
v1 ∧ (v2 ∧ v3) = (v1 · v3)v2 − (v1 · v2)v3 (2)
Esercizio. Dati u e v ortogonali (con v 6= 0) trovare un w ortogonale a v tale che u = w∧v.Tale w e unico?
Soluzione. w = v ∧ u/|v|2. Si.
211

Introduciamo i seguenti concetti.Retta d’applicazione di (P, v) e la retta per P diretta come v.Momento (polare) di (P, v) rispetto al punto (polo) O e il vettore libero mO = OP ∧ v.
Se ora variamo il polo
mA = AP ∧ v = (AO +OP ) ∧ v = AO ∧ v +mO
Consideriamo ora una retta orientata r di versore u. Se O,A ∈ r allora
mA · u = mO · u+AO ∧ v · u = mO · u.
Ha allora senso parlare di mr := mO ·u come momento (assiale) di (P, v) rispetto alla rettaorientata r (u e il versore di r e O ∈ r).
Consideriamo un insieme (o sistema) S di n vettori applicati (Pi, vi), i = 1, ..., n. Sidice loro risultante il vettore libero R =
∑ni=1 vi. Si dice momento (polare risultante) di S
rispetto al polo O il vettore libero MO =∑n
i=1OPi ∧ vi.Se variamo il polo
MA =n∑i=1
APi ∧ vi =n∑i=1
(AO +OPi) ∧ vi,
MA = MO +AO ∧R. (3)
MO non dipende da O se e solo se R = 0. Vediamo anche che MO · R non dipende da O:tale quantita e detta trinomio invariante. Abbiamo cosi’ MO = µ+NO con µ parallelo adR ed indipendente da O e NO ortogonale ad R.
La quantita
Mr =n∑i=1
mir =n∑i=1
OPi ∧ vi · u = MO · u,
indipendente dalla scelta del punto O sulla retta r di versore u, e detta momento (assialerisultante) del sistema S) rispetto alla retta orientata r.
13.1.1 Asse Centrale
Consideriamo il sistema (Pi, vi)i=1,...,n con R 6= 0. Sottraendo alla (3) µ ambo i membrisi ha NA = NO + AO ∧ R. Da questa relazione si ha che se esiste un punto Q tale cheNQ = 0, allora NA = 0 per ogni punto A della retta passante per Q e parallela ad R esolo per tali punti. Ora vediamo se un tale punto Q esiste. Abbiamo cosi’ l’equazioneNO + QO ∧ R = 0, cioe NO = OQ ∧ R (con NO · R = 0). Come visto nell’esercizio,OQ = R ∧NO/|R|2 soddisfa tale equazione. Pertanto l’applicazione
λ 7→ OQ(λ) =R ∧NO
R2+ λR =
R ∧MO
R2+ λR (4)
212

definita sull’asse reale, ci da la retta luogo dei punti rispetto ai quali si ha momento ugualea µ (e quindi momento di minimo modulo). Tale retta si dice asse centrale del sistema divettori applicati (a risultante diversa da zero).
Consideriamo ora il caso particolare in cui µ = 0. Per la (3) con A ∈ a –asse centrale–,si ha
0 = µ = MA = MO +AO ∧R, MO = OA ∧R.
Da cio vediamo che se R 6= 0 e µ = 0 allora il solo vettore risultante applicato in un puntoqualsiasi dell’asse centrale equivale (ai fini del calcolo del risultante e del momento) alsistema di partenza, cioe ha uguale risultante e uguale momento rispetto ad un qualunquepolo. In tal caso si usa dire (con abuso di linguaggio) che “il risultante ammette rettad’applicazione”. Notiamo che solo sull’asse centrale vale la suddetta proprieta (verificarlo)e che per un sistema a risultante R 6= 0 la condizione µ = 0 e non solo sufficiente ma anchenecessaria perche il risultante ammetta retta di applicazione (verificarlo).
Casi particolari della situazione R 6= 0 e µ = 0 si hanno quando (i) R 6= 0 e i vettorisono complanari, (ii) R 6= 0 e le rette di applicazione dei vettori sono concorrenti in unpunto. Un altro caso e il seguente.
13.1.2 Centro di un sistema di vettori applicati paralleli a con R 6= 0
Sia (Pi, vi)i=1,...,n con vi paralleli e con R 6= 0. Allora vi = aik con ai reali e k versore.
R = (
n∑i=1
ai)k, MO =
n∑i=1
OPi ∧ vi =
n∑i=1
aiOPi ∧ k,
MO ·R = (
n∑i=1
aiOPi) ∧ k · (n∑i=1
ai)k = 0.
Abbiamo cosi’ verificato che µ = 0. Usando la (2) si ha
R ∧MO
R2+ λR =
(∑n
i=1 ai)k
(∑n
i=1 ai)2∧ [(
n∑i=1
aiOPi) ∧ k] + λR =
=
∑ni=1 aiOPi∑ni=1 ai
−(∑n
i=1 aiOPi · k)k∑ni=1 ai
+ λR =
=
∑ni=1 aiOPi∑ni=1 ai
+ ξR,
dove ξ = λ−∑ni=1 aiOPi·k
(∑ni=1 ai)
2 . L’asse centrale e quindi
ξ 7→∑n
i=1 aiOPi∑ni=1 ai
+ ξR.
213

Il punto C dato da OC =∑ni=1 aiOPi∑ni=1 ai
si dice centro del sistema di vettori paralleli a
R 6= 0 e gode della proprieta di appartenere all’asse centrale qualunque sia il versore k.
214

13.2 Richiami sulle trasformazioni lineari
Sia V spazio vettoriale di dimensione n. Ove necessario, distingueremo il vettore u di Vdall’n-upla u delle sue componenti rispetto ad una base data di V . Vale allora
Proposizione 13.2.1 Siano e∗i , ei due basi di V , dette rispettivamente base fissa e basemobile. Allora esiste unica un’applicazione lineare A ∈ End(V ) tale che
ei = Ae∗i , i = 1, . . . , n. (1)
Nel seguito supporremo sempre che e∗i e ei siano basi ortonormali, ovvero ei·ej = e∗i ·e∗j = δij ;sia
Aij = e∗i · ej = e∗i ·Ae∗jla matrice le cui colonne sono le componenti dei vettori ei nella base e∗i . Sia AT la traspostadi A. Vale allora
Proposizione 13.2.2 Se u ha componenti u∗ = (u∗1, . . . , u∗n) nella base fissa, allora
i) le componenti di u nella base mobile ei sono
u = ATu∗,
ii) le componenti del vettore trasformato v = Au nella base fissa e∗i sono
v∗ = Au∗.
iii) la matrice A e ortogonale, ovvero A−1 = AT .
Dimostrazione. Dimostriamo i)
ui = u · ei =∑j
u∗je∗j · ei =
∑j
Ajiu∗j = (ATu∗)i
dimostriamo ii)
v∗i = Au · e∗i = A(∑j
u∗je∗j ) · e∗i =
∑j
u∗jAe∗j · e∗i =
∑j
Aiju∗j = (Au∗)i.
dimostraimo iii)
(ATA)ij =
n∑k=1
(AT )ikAkj =
n∑k=1
AkiAkj =
n∑k=1
(e∗k · ei)(e∗k · ej) = ei · ej = δij .
Da ATA = I, segue che det(ATA) = (detA)2 = 1⇒ |detA | = 1. Come e noto, il gruppodelle matrici ortogonali O(n) si divide in due componenti (topologicamente sconnesse); lacomponente connessa all’identita costituisce il sottogruppo speciale ortogonale (delle rota-zioni proprie se n = 3) SO(n), l’altra individua le riflessioni (non formano un sottogruppo)caratterizzati da:
A ∈ SO(n)⇒ detA = 1, A ∈ O(n) \ SO(n)⇒ detA = −1.
215

13.3 Cinematica rigida
13.3.1 Velocita angolare
Ci specializziamo ora al caso dello spazio euclideo tridimensionale. Indichiamo con E3 lospazio vettoriale tridimensionale dotato di un prodotto scalare definito positivo. Sia (O, e∗i ),i = 1, 2, 3, base ortonormale di E3, detta terna fissa. Data un’altra base ortonormale (O, ei)di E3, detta terna mobile,
t 7−→ ei(t)i=1,2,3, ei(0) = e∗i ,
indichiamo con R(t) la matrice delle componenti dei versori ei(t) rispetto a e∗i :
Rij := e∗i · ej(t) = cos(e∗i , ej).
Pertanto, dal teorema di rappresentazione di vettori in una base,
e∗j = e∗j · ei ei = Rjiei (somma muta sulla coppia di indici i)
ei = e∗j · ei e∗j = RTije∗j (somma muta sulla coppia di indici j)
Chiaramente, da ei = RTijRjkek si ha RTijRjk = δik,
RTR = I
Sia u un vettore un vettore solidale alla base mobile. Allora,
u(t) = uiei(t), ui : costanti.
Le componenti di u(t) nella base fissa sono
u(t) = uiei(t) = uiRTije∗j = (Rjiui)e∗j = u∗je∗j : u∗j (t) = Rji(t)ui, u∗(t) = R(t)u,
queste relazioni mostrano che la matrice ortogonale R rappresenta l’endomorfismo A del-la (1) nella base fissa. La derivata temporale delle componenti u∗(t), nella base fissa,esprimono la velocita u di u rispetto alla base fissa,
u = u∗i (t)e∗i , u∗(t) = R(t)u = RR−1u∗(t) = RRTu∗(t) (2)
Le componenti di u nella base mobile si ottengono
u = u∗i (t)Rijej(t) =: uj(t)ej(t),
u(t) = RT u∗ = RT RR−1u∗(t) = RT RRTu∗(t) = RT Ru(t). (3)
216

Derivando la relazione RRT = RTR = I rispetto al tempo, ad esempio
RTR+RT R = (RT R)T +RT R = 0,
si vede subito che le matrici
Ωf = RRT , Ωm = RT R
sono antisimmetriche: ΩT = −Ω. Le relazioni (2) e (3) permettono di esprimere, nella basefissa o nella base mobile, le componenti del vettore velocita (ovviamente velocita rispettoalla base fissa) di un vettore solidale alla base mobile
(u)∗ = Ωfu∗, u = Ωmu.
In dimensione 3, esse costituiscono la rappresentazione, rispettivamente nella base fissa emobile di un vettore ω, detto velocita angolare. Vale infatti
Ωf = RΩmRT .
Teorema 13.3.1 (di rappresentazione degli operatori antisimmetrici di E3) Per ognimatrice A antisimmetrica esiste un unico vettore ω ∈ E3 tale che
Av = ω ∧ v, ∀ v ∈ E3 :
Dimostrazione. L’operatoreω(v) := ω ∧ v
e lineare e antisimmetrico poiche la matrice Ωij ad esso associata e antisimmetrica:
Ωij := ei · ω(ej) = ei · ω ∧ ej = ej · ei ∧ ω = −ej · ω ∧ ei = −Ωji.
Al variare di ω in E3, gli operatori lineari ω(·) definiscono un sottospazio S di dimensione3 dello spazio vettoriale Skw(3) degli operatori antisimmetrici di E3. Ora, Skw(3) e sot-tospazio (varieta lineare) di M(3, R), spazio vettoriale delle matrici 3× 3 su R, isomorfo aE3, definito dalle 6 equazioni (vincoli)
Skw(3) = A ∈M(3, R) : Aij +Aji = 0, i, j = 1, 2, 3.
Ma allora dimSkw(3) = dimM(3, R)− 6 = 9− 6 = 3 = dimS, pertanto S ≡ Skw(3).
L’unico vettore ω∗ (risp. ω) associato ad Ωf (risp. Ωm) in modo che
ω∗ ∧ u = Ωfu, ω ∧ u = Ωmu ∀ u ∈ E3
e detto rappresentazione della velocita angolare del moto t 7→ R(t) nella terna fissa (risp.terna mobile):
ω =∑i
ω∗i e∗i =
∑i
ωiei.
217

Si osservi che ω e vettore libero, cioe non e definito il suo punto di applicazione; la di-stinzione tra la rappresentazione della velocita angolare del moto nella terna fissa (velocitaangolare nello spazio) e nella terna mobile (velocita angolare nel corpo) puo offrire ulterioriindicazioni nella teoria del corpo rigido, si veda p.e. la trattazione di V. Arnol’d in “Metodimatematici della meccanica classica”.
Nel seguito si indichera semplicemente con Ω la matrice Ωm.
Formule di Poisson
Dalla (3) per v = ei si hanno subito le Formule di Poisson:
ei = Ωei = ω ∧ ei, i = 1, 2, 3.
Talvolta e utile esprimere ω in funzione degli ei e delle loro derivate temporali: da
ei ∧ ei = ei ∧ (ω ∧ ei) = ω − (ei · ω)ei,
sommando su i3∑i=1
ei ∧ ei = 3ω −3∑i=1
(ei · ω)ei = 2ω
si ha
ω =1
2
3∑i=1
ei ∧ ei.
Esempio 1 (Rotazioni piane). Supponiamo che nel moto della terna (O, ei) rispetto a(O, e∗i ) risulti e∗3 ≡ e3 per ogni t. Allora, detto ϑ = ϑ(t) l’angolo tra e∗1 ed e1(t), valutatoin senso antiorario, la matrice R ∈ SO(3) e data da
R(ϑ) =
cosϑ − sinϑ 0sinϑ cosϑ 0
0 0 1
.
La matrice Ω = RT R risulta essere
Ω =
0 −ϑ 0
ϑ 0 00 0 0
.
antisimmetrica, come richiesto. Il vettore ω ad essa univocamente associato imponendo lacondizione ω ∧ v = Av, ∀v ∈ E3 risulta essere ω = ϑe3 = ϑe∗3 (la facile verifica e lasciataallo studente), ovvero la velocita angolare e un vettore libero ortogonale al piano per(e2, e1). Si noti che in questo caso particolare, le rappresentazione della velocita angolarenella terna fissa e mobile sono uguali.
218

Moti Rigidi
Sia S un sistema di n punti materiali. Il moto di S e descritto, rispetto ad una terna(O∗, e∗l ) di E3 dalle n funzioni t 7→ O∗Pi(t) a valori in R3; O∗Pi e detto vettore posizionedel punto Pi.
Definizione 13.3.1 Il moto di S e rigido se la distanza tra ogni coppia di punti di S nonvaria nel tempo.
Se in S, sistema in moto rigido, e possibile individuare almeno tre punti non allineati, eanche possibile associare ad S una terna (O, el) solidale ad S, nel senso che le componentidei vettori posizione rispetto alla terna solidale OPi sono costanti nella terna solidale.Risulta allora, per i, j = 1, . . . n
PiPj = O∗Pj −O∗Pi =
3∑k=1
ukek.
Possiamo ora applicare le formule precedenti che esprimono la derivata temporale dei vettorisolidali ottenendo
u =d
dtPiPj =
d
dtO∗Pj −
d
dtO∗Pi = vj − vi = ω ∧ u = ω ∧ PiPj
ove ora le vi, vj hanno il significato di velocita dei punti Pi rispetto alla terna (O∗, e∗l ) eω e la velocita angolare del moto di (O, el) rispetto a (O∗, e∗l ). La relazione precedente enota come Formula fondamentale dei moti rigidi :
(4) vj = vi + ω ∧ PiPj , i, j = 1, . . . n
ove tutte le quantita che vi compaiono sono espresse nel riferimento (O, el). Scambiando ilruolo delle due terne si deduce subito che la forma della (4) e indipendente dal riferimento.
Atti di moto
Consideriamo, ad esempio, in un istante t fissato, l’insieme dei vettori velocita degli (infiniti)punti OP della terna (O, ei) solidale ad un sistema S in moto rigido. Tale distribuzionedi vettori applicati OP 7→ (OP, vP ), che possiamo anche pensare come assegnata, e quindisvincolata dal moto di un certo sistema S, e detta Atto di Moto.
L’atto di moto A e detto rigido se esiste ω tale che vale la formula fondamentale deimoti rigidi
vP = vQ + ω ∧QP, ∀P,Q
I seguenti sono casi particolari di Atti di Moto rigido:
• elicoidale, se esiste una retta r i cui punti hanno velocita parallela alla retta,
219

• rotatorio, se esiste un punto Q tale che vQ = 0 (e allora vP = ω ∧QP ),
• traslatorio, se per ogni coppia di punti P,Q si ha vP = vQ (e allora ω = 0),
• piano, se esiste un piano π solidale al moto che si muove mantenendosi parallelo adun piano π0 fisso (e allora vP ∈ π ∀P ).
Teorema 13.3.2 (di Mozzi) Ogni Atto di Moto rigido e elicoidale
Dimostrazione. SiaA Atto di Moto rigido. Se moltiplichiamo scalarmente per ω entrambii membri della formula fondamentale dei moti rigidi si ha vP · ω = vQ · ω ∀P,Q. Rimanecosı univocamente determinato il vettore componente della velocita di A lungo ω:
τ =(vP · ω)
ω2ω
mentre, sempre dalla formula fondamentale dei moti rigidi, i vettori componente dellavelocita perpendicolare ad ω verificano
τ + v⊥P = τ + v⊥Q + ω ∧QP ⇒ v⊥P = v⊥Q + ω ∧QP
Supponiamo esista un punto Q tale che v⊥Q = 0. La relazione appena trovata dice che tutti
i punti P della retta per Q e parallela ad ω hanno v⊥P = 0 + ω ∧QP = 0, ovvero che esisteuna retta r i cui punti hanno velocita, uguale a τ in questo caso, parallela alla retta, quindil’Atto di Moto rigido e elicoidale.
Cerchiamo Q. Esso e individuato dal vettore OQ soddisfacente alla condizione
0 = v⊥Q = v⊥O + ω ∧OQ, i.e. v⊥O = ω ∧QO
con ω 6= 0 e v⊥O , ω dati. Tale problema e gia stato risolto nel Cap. Vettori Applicati delleDispense. Si ha OQ = (ω ∧ vO)/ω2. L’equazione dell’asse istantaneo di rotazione (retta r)e quindi
λ 7→ OQ+ λτ =ω ∧ vOω2
+ λω · vPω2
ω,
luogo di punti aventi velocita minima (pari a τ).
Osservazioni.1. Sia A Atto di Moto rigido piano. Siano P ′,Q′ le proiezioni di P,Q su π. Da
vP ′ = vQ′ + ω ∧ P ′Q′, essendo P ′Q′ ∈ π, vP ′ − vQ′ ∈ π, si ha che ω ⊥ π. L’asse istantaneodi rotazione incontra π in un punto Q∗ detto centro istantaneo di rotazione.
2. Verificare che se A e (rigido) rotatorio si ha τ = 0, se A e (rigido) traslatorio risultaω = 0.
Esempio 2 (Moto di puro rotolamento di un disco rigido su di una guida rettilinea).
220

Un disco omogeneo D di raggio R e centro G rotola sull’asse per e∗1 di un riferimento(O∗, e∗1, e
∗2, e∗3) mantenendosi nel piano (e∗1, e
∗2). Il disco (sistema rigido) definisce il moto
(rigido piano) di una terna (G, e1, e2, e3) solidale al disco.
Il moto del disco e di puro rotolamento se la velocita del punto c ∈ D che all’istantet coincide con il punto di contatto C∗ tra il disco e la guida e nulla per ogni t. Questoequivale a dire che l’atto di moto (rigido piano) definito dal moto della terna solidale erotatorio attorno al punto C∗, centro istantaneo di rotazione. Abbiamo visto (Esercizio1) che la velocita angolare associata al moto piano della terna solidale e ω = ϑe3 = ϑe∗3.Usando la formula fondamentale dei moti rigidi, ricaviamo la velocita del centro G del disco
vG = vC + ω ∧ CG = 0 + ϑe∗3 ∧Re∗2 = −Rϑe∗1,
parallela ad e∗1. Di solito l’angolo tra e∗1 e e1 e valutato in senso orario, pe cui vG = Rϑe∗1.Integrando quest’ultima relazione si ottiene lo spazio percorso dal centro G lungo la guida
s(t) = xG(t) = Rϑ(t) +Rϑ(t0).
13.4 Cinematica relativa
Nello studio della forma delle equazioni del moto di un sistema in relazione alla terna diversori scelta come base di E3, le terne via via introdotte sono dette sistemi di riferimentoo osservatori. Sia T a = (O∗, e∗i ) sistema di riferimento (solidale ad uno spazio) inerzialee T r = (O, ei) sistema di riferimento relativo. Sia ωτ la velocita angolare del moto di T r
rispetto a T a; ωτ e detta velocita angolare di trascinamento.
Ricaviamo l’espressione delle grandezze cinematiche (velocita, accelerazione) del motodi un sistema S di n punti materiali Pi nelle terne T a e T r. Iniziamo scrivendo la relazione,valida per ogni Pi
(1) O∗Pi(t) = O∗O(t) +OPi(t)
ovvero (indici ripetuti qui e nel seguito sottintendono una sommatoria da 1 a 3)
x∗i (t)e∗i = x∗Oi(t)e
∗i + xi(t)ei(t).
Tale relazione e la sua derivazione rispetto al tempo si basano su di un’ipotesi che suppor-remo sempre verificata
Postulato (in Meccanica Classica) Lunghezze dei vettori ed intervalli di tempo sonoindipendenti dall’osservatore.
Derivando la (1) rispetto a t
vaP = x∗i e∗i = x∗Oie
∗i + xiei + xiei
221

e ricordando le formule di Poisson ei = ω ∧ ei, ricaviamo la relazione (Formula di Galileo)tra la velocita assoluta va e relativa vr = xiei
(2) vaP = vrP + vτP
ovevτP = vaO + ωτ ∧OP
e detta velocita di trascinamento. Essa e la velocita del punto P ′ sovrapposto a P e solidaleal moto di T r.
Deriviamo la (2) per ottenere la relazione tra le accelerazioni, usando ancora le formuledi Poisson
d
dtvrP = arP + ωτ ∧ vrP
d
dtvτP =
d
dt(vaO + ωτ ∧OP ) = aaO + ωτ ∧OP + ωτ ∧ (vrP + ωτ ∧OP )
Pertanto
aaP =d
dtvaP = aaO + ωτ ∧OP + 2ωτ ∧ vrP + ωτ ∧ (ωτ ∧OP )
che si compendia nella Formula di Coriolis
aaP = arP + aτP + acP
ove i termini al secondo membro sono detti rispettivamente accelerazione relativa, ditrascinamento e complementare o di Coriolis e valgono
arP = xiei, aτP = aaO + ωτ ∧OP + ωτ ∧ (ωτ ∧OP ), acP = 2ωτ ∧ vrP
Anche ora aτP ha il significato di accelerazione del punto P ′ sovrapposto a P e solidale almoto di T r.
Osservazione. La velocita angolare ωτ del moto (di trascinamento) di T r rispetto aT a e un vettore libero. La sua derivata temporale gode della proprieta seguente: da
ωτ = ω∗i e∗i = ωiei,
usando ancora le formule di Poisson, si trova
d
dtωτ = ω∗i e
∗i = ωiei + ωiei = ω + ω ∧ ω = ωiei.
Proposizione 13.4.1 Se il moto di S e rigido rispetto a T a, ovvero esiste un vettore ωa
tale chevaPj = vaPi + ωa ∧ PiPj , ∀i, j = . . . n,
allora il moto di S e rigido rispetto ad ogni T r .
222

Dimostrazione. Applichiamo la formula di Galileo al moto di Pi, Pj
vaPi = vτPi + vrPi = vaO + ωτ ∧OPi + vrPivaPj = vτPj + vrPj = vaO + ωτ ∧OPj + vrPj
e sottraiamo membro a membro le relazioni precedenti
vrPj − vrPi = vaPj − v
aPi + ωτ ∧ (OPj −OPi) = ωa ∧ PiPj + ωτ ∧ PjPi = (ωa − ωτ ) ∧ PiPj
ovvero, il moto di S rispetto a T r e rigido con ωr = ωa − ωτ
La Proposizione dimostrata si enuncia anche dicendo che la proprieta di rigidita delmoto di S e indipendente dall’osservatore. La (4) fornisce anche la legge di composizionedelle velocita angolari di moti rigidi
ωa = ωτ + ωr.
223
224

Capitolo 14
Derivata di determinante
Consideriamo la matrice quadrata (N ×N) :
a11 . . . a1N
. . .... aij
.... . .
aN1 . . . aNN
i cui elementi aij sono i valori assunti dalle N2 funzioni aij = aij(λ) di R in R. Sia
J = det(aij) . Com’e noto J =∑N
j=1Aijaij (“sviluppo del determinante rispetto alla i-esima riga”), dove Aij sono i complementi algebrici relativi agli elementi aij ; valgono purele relazioni:
(1) J =N∑h=1
Aihaih =N∑k=1
Akjakj ∀i, j = 1, . . . , N.
Inoltre sappiamo che:
(2)
N∑h=1
Aihajh =
J se i = j
0 se i 6= j ,
onde si puo scrivere:
(3) Jδij =N∑h=1
Aihajh.
225

Calcoliamo la derivata di J pensato come funzione di R in R tramite le N2 aij(λ) :J(λ) = J (a11(λ), . . . , aij(λ), . . . , aNN (λ)).
(4)d
dλJ(λ) =
N∑i,j=1
∂J
∂aij(. . . , ahk(λ), . . . )
d
dλahk(λ).
Restano da esprimere le derivate parziali ∂J∂aij
. A tale scopo sviluppiamo J rispetto alla
i-esima riga (oppure rispetto alla j-esima colonna, e lo stesso): J =∑N
h=1Aihaih; datoche, per i fissato e per h = 1, . . . , N, Aih non dipendono da aij , si ottiene subito:
(5)∂J
∂aij= Aij .
Ritorniamo alla (4), si ha infine:
(6)dJ
dλ(λ) =
N∑i,j=1
Aijd
dλaij(λ).
226
Capitolo 15
Test
15.1 Alcune domande
• Cosa dobbiamo prima di tutto elencare, assegnare, prima di definire i moti dinamicamentepossibili per un sistema vincolato?
• Quali sono i moti dinamicamente possibili?
• Cosa sono le reazioni vincolari?
• Cos’e un vincolo olonomo?
• Cosa sono le coordinate libere o Lagrangiane per un vincolo olonomo?
• Cos’e la dimensione di un sistema olonomo?
• In cosa consiste il metodo del Moltiplicatori di Lagrange per la determinazione dei motie delle reazioni vincolari?
• Un moto rigido si puo pensare come all’assegnazione del moto dell’origine di una ternamobile t 7→ OΩ(t) e all’assegnazione del moto della terna di versori ortonormale associata,t 7→ e∗i (t), i = 1, 2, 3. Con questi oggetti, scrivere chi e il moto della matrice ortogonaleassociata: t 7→ R(t) e la correlata velocita angolare t 7→ ω(t).
• Cosa sono i vincoli lisci o ideali? in cosa differiscono dai vincoli “privi d’attrito”?
• Il disco che rotola senza strisciare e un vincolo anolonomo pero integrabile, cosa significa?
• Perche il disco che rotola senza strisciare e un sistema a vincoli lisci?
• Teorema di Conservazione dell’Energia: Enunciato e dimostrazione.
• Teorema di Lagrange-Dirichlet: Enunciato e dimostrazione.
• Principio di D’Alembert: Enunciato e dimostrazione.
• La restrizione di sistemi conservativi su vincoli olonomi e conservativa: mostrarlo indettaglio.
• Deduzione delle equazioni di Lagrange.
• Perche la ‘matrice cinetica’ e definita positiva?
227
• Linearizzazione delle equazioni di Lagrange attorno a equilibri stabili: che ipotesi dilavoro si fanno? affinche si ottengano delle frequenze di “piccola oscillazione” non banali( 6= 0), che ipotesi si deve proporre? come si calcolano le frequenze di “piccola oscillazione”?
• Dare un esempio di stabilizzazione giroscopica e mostrare la sua fragilita qualora siintroducano delle forze viscose.
• Dimostrare il Teorema dell’Hessiano Non Degenere nel caso 1-dimensionale, piu precisa-mente, ricondurlo al primo e secondo metodo di Lyapunov.
• Deduzione delle equazioni di evoluzione del corpo rigido dal Pr. di D’Alembert.
• Equilibri e stabilita delle equazioni di Euler per il c. rigido scarico (cioe, con momentobaricentrale delle forze nullo).
• Descrizione alla Poinsot del corpo rigido scarico.
• Mostrare che i moti del c. rigido con ellissoide a simmetria assiale sono delle precessioniregolari.
15.2 Altre domande
• In cosa consiste l’invarianza in forma delle equazioni di Lagrange? invarianza rispetto acosa?
• L’integrale primo che si deduce dopo aver osservato che p.e. la funzione di Lagrangee indipendente da qj
′, ∂L∂qj′
= 0, (qj′
si dice ciclica) si puo interpretare nello schema del
teorema di Nother?
• Enunciare e dimostrare il principio-teorema variazionale di Hamilton.
• Solamente i sistemi meccanici olonomi conservativi si possono porre in forma variazionale?e se esistesse pure una forza del tipo viscoso −kq?• Enunciare e dimostrare il teorema di Nother.
• Enunciare e dimostrare il teorema di Routh.
• Che relazioni intercorrono tra i moti spontanei di una particella di massa m senza for-ze attive vincolata senza attrito su di una superficie e le geodetiche (curve di lunghezzastazionaria) sulla stessa superficie?
• Geodetiche sulle superfici di rotazione (cioe, a simmetria assiale), teorema di Clairaut(vedi p.e. Arnol’d, Metodi matematici della meccanica classica, p. 87).
• Brachistocrona (vedi p.e. De Marco, Analisi Due/2, vecchia edizione).
• Bolle di sapone: superfici di rotazione di area minima (estremale) tra due circonferenzedi ugual raggio R e poste coassialmente a distanza 2`.
• Cosa sono le trasformazioni canoniche? E’ vero che sono un sottogruppo proprio delgruppo dei diffeomorfismi di T ∗S in se (detti coniugazioni)? spiegare in dettaglio.
• Le trasformazioni puntuali (diffeomorfismo locali dei cambi di carta nella varieta vincolarebase S) q = q(q) inducono delle trasformazioni canoniche in T ∗S?
• In cosa consiste la condizione algebrica caratterizzante le tr. canoniche? come ci si arriva?
228

• (...) Condizione di Lie e condizione algebrica caratterizzante le tr. canoniche. Trasfor-mazioni F1 e F2.• (...) Metodo di integrazione di Hamilton-Jacobi. Dettagli del caso separabile: H(q, p) =G(f1(q1, p1), f2(q2, p2), ..., fN (qN , pN )) con l’ipotesi ∂fi
∂pi6= 0.
•(...) Metodo di integrazione di Hamilton-Jacobi. Dettagli del caso di n − 1 variabilicicliche: H(q, p) = H(q1, p1, . . . , pn) con l’ipotesi ∂H
∂p16= 0.
• Descrizione del problema dei due corpi nel sistema della massa ridotta. Mettere inevidenza l’uso degli integrali primi.• Per il problema di Kepler (cioe nel sistema della massa ridotta) le orbite sono tutte esole delle (sezioni) coniche. Mostrare in dettaglio.• Uso del teorema di Routh nel problema di Kepler.
229