travaux pratiques d™automatique - … · 2les questions 4 et 5 font l™objet de tp de synthŁse...
TRANSCRIPT
TRAVAUX PRATIQUES D�AUTOMATIQUE
I. ZAMBETTAKIS & A. TCHANGANI
Département GEII, IUT de Tarbes, Université Paul Sabatier
Deuxième Année

ii

Table des matières
Préface vii0.1 Déroulement des TP en Tronc commun . . . . . . . . . . . . . . . . . vii
0.1.1 Etude de 2 processus . . . . . . . . . . . . . . . . . . . . . . . vii0.1.2 Evaluation pour chaque processus . . . . . . . . . . . . . . . . vii0.1.3 CAO : Synthèse de commandes des processus modélisés en TP vii
0.2 Déroulement des TP en Option A&S . . . . . . . . . . . . . . . . . . viii0.2.1 TP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii0.2.2 CAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
I TRONC COMMUN 1
1 REGULATION DE NIVEAU 31.1 Objectifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Description de la maquette . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Modélisation et Analyse . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Equations de fonctionnement . . . . . . . . . . . . . . . . . . 61.3.2 Identi�cation paramétrique du modèle de connaissance . . . . 61.3.3 Linéarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3.4 Schéma fonctionnel . . . . . . . . . . . . . . . . . . . . . . . . 61.3.5 Identi�cation en boucle fermée . . . . . . . . . . . . . . . . . . 7
1.4 Synthèse de régulation . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4.1 Commande analogique1 . . . . . . . . . . . . . . . . . . . . . . 7
2 Système de chau¤age 92.1 Objectif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Description du processus . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.1 Problème d�asservissement . . . . . . . . . . . . . . . . . . . . 102.3 Modélisation du processus . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 Linéarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Les questions 1, 2, 3 sont à préparer hors séances de TP
iii
iv TABLE DES MATIÈRES
2.3.2 Identi�cation . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.3 Schéma fonctionnel . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Synthèse de régulation . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4.1 Régulation analogique2 . . . . . . . . . . . . . . . . . . . . . . 12
3 Suspension magnétique 133.1 Description de la maquette . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Modélisation et Analyse . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 Linéarisation du modèle de connaissance du processus3 . . . . 153.2.2 Modélisation de l�actionneur (MA400) . . . . . . . . . . . . . 163.2.3 Schéma fonctionnel . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Synthèse de régulation . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3.1 Commande analogique 4 . . . . . . . . . . . . . . . . . . . . . 16
4 Pendule inversé 194.1 Description de la maquette . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1.1 Caractéristiques techniques . . . . . . . . . . . . . . . . . . . 204.1.2 Logiciel VisSim . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.2 Etude du chariot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.2.1 Modèle de connaissance du chariot5 . . . . . . . . . . . . . . . 214.2.2 Modèle du comportement . . . . . . . . . . . . . . . . . . . . 224.2.3 Synthèse de l�asservissement de la position . . . . . . . . . . . 22
4.3 Etude du système articulé . . . . . . . . . . . . . . . . . . . . . . . . 224.3.1 Modèle de connaissance6 . . . . . . . . . . . . . . . . . . . . . 224.3.2 Etude de la commande . . . . . . . . . . . . . . . . . . . . . . 22
II OPTION A&S 25
5 Bille sur poutre 275.1 Description de la maquette . . . . . . . . . . . . . . . . . . . . . . . . 275.2 Environnement PC pour l�acquisition et la commande . . . . . . . . . 285.3 Etude technique du système . . . . . . . . . . . . . . . . . . . . . . . 295.4 Cahiers des charges . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.5 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.5.1 Modèles de l�actionneur . . . . . . . . . . . . . . . . . . . . . 30
2Les questions 4 et 5 font l�objet de TP de synthèse à l�aide de Matlab.3Les questions 3 et 4 sont à préparer avant la première séance de TP4Les questions 1, 2, 3 sont à préparer avant la deuxième séance de TP5Les questions de ce paragraphe sont à préparer avant la première séance de TP6Les questions 1, 2, 3 sont à préparer avant la deuxième séance de TP

TABLE DES MATIÈRES v
5.5.2 Modèle de l�ensemble bille + poutre7 . . . . . . . . . . . . . . 315.6 Commande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.6.1 Utilisation de l�environnement VisSim . . . . . . . . . . . . . . 325.6.2 Asservissement en position � de la poutre seule . . . . . . . . 335.6.3 Asservissement de la position de la bille . . . . . . . . . . . . 33
6 Problème du chateau d�eau 356.1 Utilisation de l�environnement VisSim . . . . . . . . . . . . . . . . . . 356.2 Commande du processus . . . . . . . . . . . . . . . . . . . . . . . . . 356.3 Commande numérique . . . . . . . . . . . . . . . . . . . . . . . . . . 36
7 Système de Chau¤age 377.1 Utilisation de l�environnement VisSim . . . . . . . . . . . . . . . . . . 377.2 Commande du processus . . . . . . . . . . . . . . . . . . . . . . . . . 377.3 Régulation numérique 8 . . . . . . . . . . . . . . . . . . . . . . . . . . 38
8 Suspension magnétique 398.1 Environnement Dspace et Test de la Carte DS1102 . . . . . . . . . . 39
8.1.1 Préliminaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 398.1.2 Bornier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398.1.3 Construction du �chier .mdl . . . . . . . . . . . . . . . . . . . 398.1.4 Manipulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
8.2 Implantation d�un régulateur sur la maquette suspension . . . . . . . 428.2.1 Implémentation du PID . . . . . . . . . . . . . . . . . . . . . 438.2.2 Implémentation d�un autre type de commandes . . . . . . . . 43
9 Pendule inversé 459.1 Identi�cation et commande numérique . . . . . . . . . . . . . . . . . 45
9.1.1 Identi�cation du modèle numérique du chariot . . . . . . . . . 459.1.2 Commande numérique du chariot . . . . . . . . . . . . . . . . 459.1.3 Commande numérique du système chariot + pendule . . . . . 45
7Cette partie est à préparer avant le TP.8Toutes les simulations de cette partie sont à préparer à l�avance, hors séances de TP.
vi TABLE DES MATIÈRES

Préface
0.1 Déroulement des TP en Tronc commun
3h par séance sans pause
0.1.1 Etude de 2 processus
� Processus thermique (2 séances)� Suspension magnétique ou bien cuve ou bien pendule inverse (2 séances)� travail personnel d�identi�cation entre les 2 séances (noté)
0.1.2 Evaluation pour chaque processus
� 1 note de compte rendu par binôme� 1 note individuelle� note pour le processus = moyenne des deux notes précédentes
0.1.3 CAO : Synthèse de commandes des processus modé-lisés en TP
Méthodes utilisées
� Black� Evans
Evaluation
2 contrôles individuels de 2h : CAO1 et CAO2
vii
viii PRÉFACE
0.2 Déroulement des TP en Option A&S
0.2.1 TP
� Commande numérique par Dspace ou bien VisSim (1 séance). Evaluation : 1contrôle écrit de 20mn
� Identi�cation de transferts discrets (1 séance). Evaluation : 1 CR
0.2.2 CAO
� Identi�cation� Sensibilisation� Evans� Débouclage� Anti-wind up
Evaluation
1 contrôle individuel oral de 15 mn : CAO3
Première partie
TRONC COMMUN
1

Chapitre 1
REGULATION DE NIVEAU
1.1 Objectifs
Régulation pour plusieurs points de fonctionnement, d�un système non linéaireprésentant une saturation.
1.2 Description de la maquette
Le processus représente de façon simpli�ée le fonctionnement d�un chateau d�eau.Il est constitué (cf. Figure 1.1)
� d�une pompe (P) qui alimente :� une cuve cylindrique (T) de section A qui se déverse dans :� deux canalisations dont les débits sont �xés par les vannes (V1) et (V2).
Remarque 1 Pendant la phase de modélisation on gardera des ouvertures constantespour (V1) et (V2) .
3

4 CHAPITRE 1. REGULATION DE NIVEAU
Figure 1.1 : Schéma de principe
L�entrée de ce processus est la tension u de commande de la pompe, et la sortieest la hauteur d�eau hs dans la cuve.
Le panneau de contrôle du système se présente sous la forme suivante (Figure1.2)

1.2. DESCRIPTION DE LA MAQUETTE 5
Figure 1.2 : Panneau de contrôle
où sont accessibles les cinq signaux (en volts) :
Mp1 : perturbation ou o¤set (P1) sur la commande de la pompe ;
Mp2-Mp3 : hauteurs de consigne que l�on peut alterner, hc = h1ou h2 ;
Mp4 : commande de la pompe (u), sature à 10 volts ( 0 � u � 10V ) ;Mp5 : mesure de la hauteur d�eau (s) ;
et deux potentiomètres (kp et ki ) permettant de régler les actions (P) et (I) durégulateur :
RC (p) = 10kp +kip
Problème d�asservissement : cahier des charges n�1Mettre au point une régulation permettant de maintenir une hauteur de consigne
hc imposée, indépendemment de toute perturbation ; ces perturbations pouvant in-tervenir sous la forme :� d�une petite variation de l�ouverture des vannes (P2)� ou d�une variation de l�o¤set (P1) :
Remarque 2 On précisera plus loin les performances attendues de cette régulation(cahier des charges n�2). On pourra noter l�analogie de ce problème avec l�alimen-tation à tension constante d�un réseau électrique (e.g. EDF).

6 CHAPITRE 1. REGULATION DE NIVEAU
1.3 Modélisation et Analyse
1.3.1 Equations de fonctionnement
� débit de la pompe : Qe = k1u; k1 = 10 ml/sV ;� débit de sortie des vannes : Qs = �
p2ghs = a
phs;
�mesure d�eau dans la cuve : s = k2hs; k2 = 0:1 V/cm ;
� hauteur d�eau dans la cuve : Adhsdt
= Qe �Qs ;où k1, k2, g, et A sont des constantes et � ne dépend que de l�ouverture des
vannes.
1.3.2 Identi�cation paramétrique dumodèle de connaissance
1. Pour u = 0, écrire la loi de vidange de la cuve. En déduire la loi d�évolutionde la hauteur. Réaliser un essai de vidange (commuter du mode �manual�au
mode �automatic� ou inversement) et en déduire une valeur dea
A. Préciser
l�unité.
2. Pour plusieurs hauteurs de consigne hc déterminer les valeurs correspondantesdes autres variables u0 et s0 à l�équilibre.� Comparer hc et hs0 et interpréter.
� Tracer la caractéristique u0 = f (hs0), en déduire la valeur dek1a; puis celles
de a et A. Préciser les unités.
1.3.3 Linéarisation
En notant �hs = hs�hs0; �s = s�s0; �u = u�u0;montrer, par une approximationau premier ordre des équations de fonctionnement, qu�autour de l�équilibre (u0, hs0,s0) le système peut être modélisé sous la forme :
�s =Ks
1 + �p�u;
et donner l�expression des constantes Ks et � en fonction de hs0. Préciser les unités.Pour hc = 15; 30; 45 cm, calculer les di¤érentes valeurs de Ks et de � :
1.3.4 Schéma fonctionnel
1. en faisant apparaitre le caractère non linéaire du processus (variables abso-lues) ;
2. en faisant apparaitre le transfert linéarisé (variables absolues et variables d�écart).

1.4. SYNTHÈSE DE RÉGULATION 7
1.3.5 Identi�cation en boucle fermée
Avec l�action proportionnelle seule, relever la réponse indicielle pour les 3 consigneshc précédentes ; déboucler et en déduire les valeurs de Ks et de � correspondantes.
1.4 Synthèse de régulation
1.4.1 Commande analogique1
1. écrire, pour les deux structures possibles du régulateur ( P et PI ), les transfertsen boucle fermée :�s
�hc;
�s
�P1;
�u
�hc;
�u
�P1;
en déduire la nécessité de l�action I pour satisfaire le cahier des charges n� 1 ;
2. expliquer pourquoi les réglages simpli�és de Ziegler - Nichols ne sont pas uti-lisables ici ;
3. cahier des charges n�2On désire que la réponse à une perturbation de type échelon soit la plus rapidepossible mais sans dépassement, et ceci pour toutes les hauteurs de consignepossibles.� montrer qu�il su¢ t que ceci soit vrai pour l�une des hauteurs et préciserlaquelle ;
� déterminer par placement de pôles un PI qui assure les cahiers des chargesn� 1 et n� 2 ;
� que peut-on dire des dynamiques de poursuite ?
4. Interprétation� implanter ce régulateur PI ;� relever, comparer et expliquer :� la réponse à un échelon de consigne (sans perturbation),� la réponse à un échelon de perturbation P1;� la réponse à un échelon de perturbation P2 (ouverture vanne) ;les cahiers des charges n� 1 et n� 2 sont-ils assurés ? sinon expliquer pour-quoi.
1Les questions 1, 2, 3 sont à préparer hors séances de TP

8 CHAPITRE 1. REGULATION DE NIVEAU

Chapitre 2
Système de chau¤age
2.1 Objectif
Régulation autour d�un point de fonctionnement d�un système non linéaire pré-sentant un retard pur.
2.2 Description du processus
Le processus est un système de chau¤age (résistance) alimenté par une tensionde commande Uc, associée à un ventilateur à débit d�air constant.
9

10 CHAPITRE 2. SYSTÈME DE CHAUFFAGE
Figure 2.1 : Schéma de fonctionnement du système de chau¤age
Un thermocouple mesure la température en un point de la canalisation.
Notations
� �e : température de consigne� Ue : tension de consigne� �s : température de sortie� Us : mesure de tension de �s
2.2.1 Problème d�asservissement
On désire maintenir la température de sortie à la valeur imposée �e, ceci defaçon indépendante vis-à-vis de perturbations pouvant intervenir sur le système (changement de débit d�air, variation de la température ambiante, courants d�air,etc...), et avec la plus grande rapidité possible.
2.3 Modélisation du processus
2.3.1 Linéarisation
1. En traçant les caractéristiques statiques :�e = f (Ue), �s = g (Us), Us = h (Ue),mettre en évidence le caractère non linéaire du processus. En donner une in-terprétation physique.
2. Choisir un point d�équilibre (Ue0; �e0; Us0; �s0) correspondant au point milieudes parties linéaires des caractéristiques :

2.3. MODÉLISATION DU PROCESSUS 11
Figure 2.2 : Zone de fonctionnement linéaire autour d�un point de fonctionnement
2.3.2 Identi�cation
En notant
�us = Us � Us0; �ue = Ue � Ue0; ��e = �e � �e0; ��s = �s � �s0
les petites variations autour du point de fonctionnement, déterminer, par diversesméthodes, la structure et les paramètres du transfert F (p) reliant �us à �ue.
2.3.3 Schéma fonctionnel
Donner le schéma fonctionnel du système en boucle ouverte en faisant apparaîtreles di¤érents éléments, variables et perturbations du processus physique ainsi que letransfert linéarisé.

12 CHAPITRE 2. SYSTÈME DE CHAUFFAGE
2.4 Synthèse de régulation
2.4.1 Régulation analogique1
1. Réaliser un bouclage proportionnel. Interpréter et proposer le meilleur réglagede ce gainKp: Justi�er la nécessité d�une action intégrale pour l�asservissementde ce processus.
2. Analyser et donner les transferts des di¤érents correcteurs disponibles sur lepetit boitier.
3. Implanter un régulateur PI de Ziegler-Nichols et comparer la commande et lasortie à celles obtenues précédemment avec le régulateur P. conclusions.
4. TP CAO 1 : Donner les régulateurs PI et PID de Ziegler-Nichols, puis com-parer :� sur un graphe G1 les simulations des commandes,� sur un graphe G2 les simulations des sorties.
5. TP CAO 2 : Déterminer par la méthode de Black le meilleur régulateur assu-rant :� une marge de gain de -10dB,� une marge de phase de 45�;� un facteur de qualité de 2.3dB,comparer les résultats de simulation (commande et sortie) avec les précédentset conclure au meilleur régulateur analogique RCA.
1Les questions 4 et 5 font l�objet de TP de synthèse à l�aide de Matlab.
Chapitre 3
Suspension magnétique
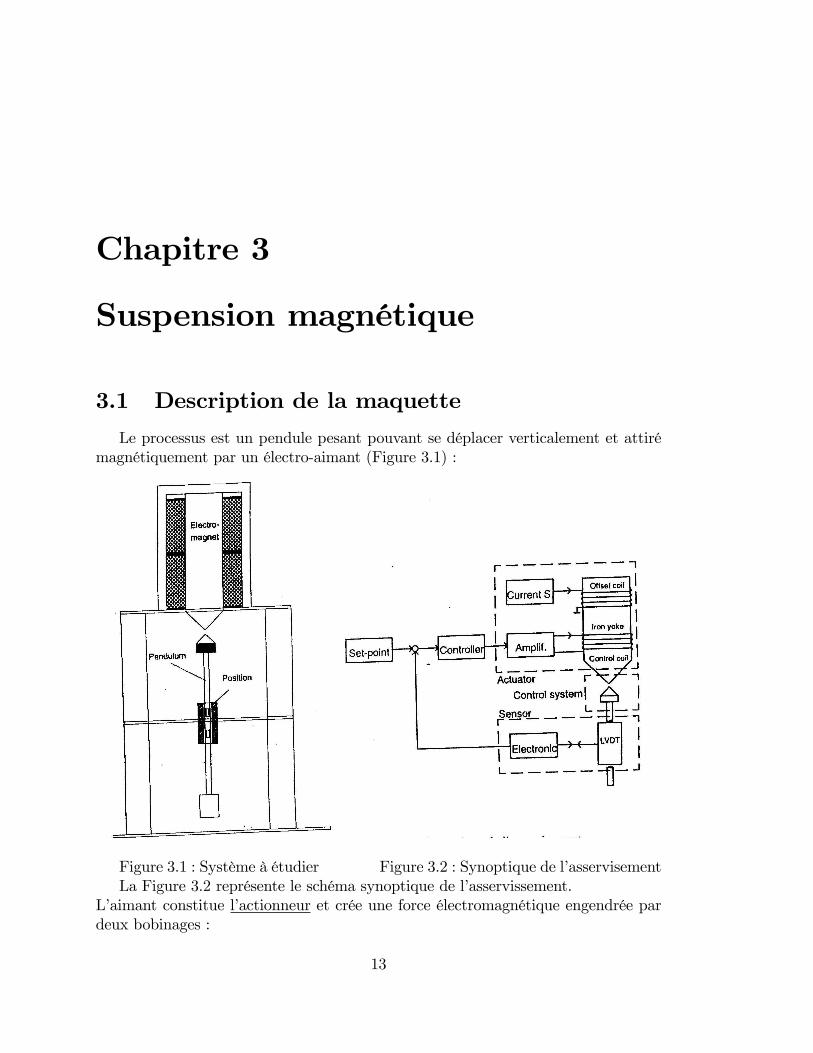
3.1 Description de la maquette
Le processus est un pendule pesant pouvant se déplacer verticalement et attirémagnétiquement par un électro-aimant (Figure 3.1) :
Figure 3.1 : Système à étudier Figure 3.2 : Synoptique de l�asservisementLa Figure 3.2 représente le schéma synoptique de l�asservissement.
L�aimant constitue l�actionneur et crée une force électromagnétique engendrée pardeux bobinages :
13

14 CHAPITRE 3. SUSPENSION MAGNÉTIQUE
� un bobinage supérieur qui sert à compenser le poids du rotor au point defonctionnement,
� un bobinage inférieur qui constitue le bobinage de contrôle commandé par unetension (u).
La position verticale du pendule est mesurée à l�aide d�un capteur délivrant unetension fonction linéaire de la hauteur h.Le panneau de contrôle du système se présente sous la forme suivante (Figure
3.3)
Figure 3.3 : Panneau de contrôle
où apparaissent les di¤érents éléments :
servo2 : mode de commande du bobinage supérieur ;
servoMA400 : mode de commande du bobinage de contrôle ;
PID-controller : régulateur PID, perturbation et consigne ;
Sur ce panneau sont accessibles les mesures (en volts) des variables suivantes :
I-monitor (servo2) : courant dans la bobine supérieure I2 (50 mA/V),
I-monitor (servoMA400) : courant dans la bobine de contrôle I1 (100 mA/V),
Setpoint : hauteur de consigne hc (-4 V/mm avec 0V pour 2.5mm),
Measured distance : hauteur mesurée hs (-4 V/mm avec 0V pour 2.5mm).

3.2. MODÉLISATION ET ANALYSE 15
cahier des chargesFaire atteindre au pendule une hauteur imposée hc ( donc à l�équilibre he =
hc) sans dépassement (ou avec le moins de dépassement possible) et la maintenirindépendemment de toute perturbation ; ces perturbations pouvent intervenir sousla forme :� d�une variation de l�alimentation du bobinage supérieur Pu (perturbation decommande),
� d�une perturbation mécanique extérieure Ps (perturbation de sortie).
3.2 Modélisation et Analyse
L�ensemble (pendule & électroaimant) peut être décrit par les équations de fonc-tionnement (cf. Figure 3.4) :� force de l�électroaimant :
F = �I2
h2;
� équation fondamentale de la dynamique
md2h
dt2= mg � F:
Figure 3.4
3.2.1 Linéarisation du modèle de connaissance du proces-sus1
Mettre tous les potentiomètres du régulateur à 0.3 pour obtenir un systèmeasservi asymptotiquement stable.
1Les questions 3 et 4 sont à préparer avant la première séance de TP

16 CHAPITRE 3. SUSPENSION MAGNÉTIQUE
1. Pour I2 = 0% tracer la caractéristique I1e = f(he) et justi�er son allure ;
2. Etudier l�e¤et de servo2 sur quelques réponses indicielles. En déduire l�intérêtde ce bobinage.
3. Par une aproximation au premier ordre autour de l�équilibre, linéariser leséquations de fonctionnement et en déduire le transfert :
�h
�I=h� heI � Ie
;
4. mettre en évidence le caractère instable du processus en boucle ouverte ;
5. calculer les valeurs des paramètres de ce transfert pour une hauteur désirée de2.5mm.
3.2.2 Modélisation de l�actionneur (MA400)
Positionner l�interrupteur du servoMA400 sur �extern�a�n de l�isoler. Véri�erque le PC-connecteur est enlevé.
1. Par un essai indiciel, proposer un transfert�I
�upour cet électroaiment ;
2. con�rmer l�étude précédente par une analyse harmonique.
3.2.3 Schéma fonctionnel
Représenter le schéma fonctionnel de l�asservissement en faisant apparaitre letransfert linéarisé (variables absolues et variables d�écart).
3.3 Synthèse de régulation
3.3.1 Commande analogique 2
Le Figure suivante indique la structure du régulateur dont les potentiomètres kp;ki, kd; Td sont accessibles sur le panneau de contrôle.
2Les questions 1, 2, 3 sont à préparer avant la deuxième séance de TP

3.3. SYNTHÈSE DE RÉGULATION 17
Figure 5 : Schéma de commande analogique
1. Calculer le transfert de chaque e¤et et indiquer l�expression des paramètresKp; Ki, Kd; T1; du régulateur PID ainsi réalisé :
PID(p) = Kp +Ki
p+
Kdp
1 + T1p;
en fonction des paramètres kp; ki, kd; Td inscrits sur le panneau de contrôle ;en déduire la plage de variation des paramètres Kp; Ki, Kd; T1;
2. Montrer que la structure PID est nécessaire pour satisfaire au cahier descharges ; montrer en particulier que les actions P ou PI seules ne permettentpas de stabiliser le système.
3. Expliquer pourquoi les réglages simpli�és de Ziegler - Nichols ne sont pasutilisables ici ;
4. Interprétation� implanter le régulateur PID suivant : kp = 0:8; ki = 0:37; kd = 0:4; Td = 1:� relever, comparer et expliquer :� la réponse à un échelon de consigne (sans perturbation),� la réponse à un échelon de perturbation Pu;� la réponse à un échelon de perturbation Ps ;
5. TP CAO 3 : Déterminer par la méthode du lieu d�Evans le meilleur régulateurPID possible.

18 CHAPITRE 3. SUSPENSION MAGNÉTIQUE

Chapitre 4
Pendule inversé
4.1 Description de la maquette
Le processus est un robot mobile élémentaire à 2 degrés de liberté, constituéd�une barre en rotation sur un chariot ; l�axe de rotation est perpendiculaire à ladirection de déplacement du chariot et constitue la position d�équilibre instable dela barre (Figure 4.1).
����
&%'$r r���
c�������
�������
����������HH
O
�
O1
r
C
y
x-
6
- F
Figure 4.1
Un capteur S2; monté sur l�axe de rotation, permet de mesurer l�angle � de labarre avec l�axe vertical.Le chariot est équipé :
19

20 CHAPITRE 4. PENDULE INVERSÉ
� d�un moteur à courant continu qui fournit la force de traction F au système,� d�un capteur S1(génératrice tachymétrique) qui fournit une tension image dela position x du chariot.
Le moteur et les capteurs S1 et S2 sont alimentés par un ampli�cateur de puis-sance muni d�un module de connection, quick connect module, qui permet la liaisonà la carte AD/DA du calculateur suivant la Figure 4.2 :
Figure 4.2 : Schéma de connexion
4.1.1 Caractéristiques techniques
Paramètre Symbole Valeur Unitélongueur du pendule L=2l 0.61 mmasse du pendule m 0.21 kgmasse du chariot M 0.455 kgmoteur :résistance de l�armature Rm 2.6 inductance de l�armature Lm 0.18 nHconstante de f.c.e.m. Km 0.00767 V/(rd/s)rapport interne d�engrenage Ke 3.7rayon de la roue motrice r 0.635 cm
cahier des chargesStabiliser la barre en position verticale (� = 0) en imposant au chariot d�atteindre
sans dépassement une position désirée xd et de la maintenir indépendemment detoute perturbation ; ces perturbations peuvent intervenir sous la forme :

4.2. ETUDE DU CHARIOT 21
� d�une perturbation électrique de la tension de l�actionneur (perturbation decommande),
� d�une perturbation sur le rail (perturbation mécanique).
4.1.2 Logiciel VisSim
La réalisation en temps réel des commandes est e¤ectuée par le calculateur viaune carte AD/DA et à l�aide du logiciel VisSim qui propose une interface graphiqueanalogue à celle de Simulink.� Blocs à utiliser :step - sin - display - rt-DataIn - rt-DataOut - sum - transfert function - statespace - matrical gain
� Pour supprimer une connection mettre le curseur sur la �èche et déplacercelle-ci.
� Pour changer de signe une entrée du sommateur : pointer le curseur sur cetteentrée puis ctrl +bouton droit de la souris .
� Pour lancer la simulation, paramétrer en run in real time.� Entrées carte : canal 0 - position x, canal 1 - angle �:� Sortie carte : canal 0 - commande.
4.2 Etude du chariot
4.2.1 Modèle de connaissance du chariot1
1. I et V étant le courant et la tension d�induit du moteur, montrer que l�équationélectrique du moteur est :
V = RmI + LmdI
dt+KmKer
�1dx
dt
2. Sachant que le couple moteur C est :
C = KmKeI;
déterminer l�expression littérale du transfert Mc (p) reliant la position x à latension V aux bornes du moteur.
Application numérique avec les unités S.I.
1Les questions de ce paragraphe sont à préparer avant la première séance de TP

22 CHAPITRE 4. PENDULE INVERSÉ
4.2.2 Modèle du comportement
1. Relever sur papier semi-log la réponse fréquentielle du chariot pour ! = 0:8 à5 rad=s .
2. Réaliser un essai indiciel d�environ 30 cm et imprimer la réponse.
3. Utiliser les mesures e¤ectuées en 1 et en 2 pour appliquer 3 méthodes di¤é-rentes d�identi�cation au chariot ( noter M1 (p) ; M2 (p) ; M3 (p)).
4. Conclusion : donner le transfert du modèle retenu.
4.2.3 Synthèse de l�asservissement de la position
1. TP CAO 1 : Déterminer un régulateur continu par une méthode de Ziegler-Nichols appropriée.
2. TP CAO 2 : Déterminer un régulateur continu qui confère à cet asservisse-ment :� une marge de gain mg � 10dB et une marge de phase m� � 45�� une réponse à un échelon de consigne de 10cm sans dépassement avec untemps de réponse tR < 0:5s; et une tension de commande Vmax < 6V
3. Implanter les régulateurs et comparer les performances du système asservi aveccelles du cahier des charges.
4.3 Etude du système articulé
4.3.1 Modèle de connaissance2
1. Déduire de l�équation d�état du pendule inverse établie en TD, l�équation d�évo-lution du système chariot-pendule reliant l�état
�x � _x _�
�Tet sa dérivée
à la tension V de commande.� Hypothèse simpli�catrice (très réaliste) : l�inductance Lm du moteur estnégligeable par rapport à sa résistance.
� Application numérique avec les unités S.I.
2. Sachant que seules la position x et l�angle � sont mesurables par les capteursS1 et S2 respectivement, donner l�équation de sortie du système.
4.3.2 Etude de la commande
1. Ouvrir sous VisSim le �chier IPVSC disponible dans SOURCES et en déduirele schéma fonctionnel global de l�asservissement qu�il permet de réaliser.
2Les questions 1, 2, 3 sont à préparer avant la deuxième séance de TP

4.3. ETUDE DU SYSTÈME ARTICULÉ 23
2. Comment est réalisée la reconstruction des variables d�état _x et _� de l�état ?
3. Comparer avec la demo Simulink Inverted pendulum dans complex models :faire fonctionner la demo et identi�er les di¤érents éléments de la commanderéalisée.
4. En positionnant le chariot à mi-course ainsi que le capteur de position ( faire5 tours à vide), réaliser la commande et relever les réponses à un échelon deconsigne de 20cm en position.Attention : La barre doit être maintenue verticale à l�état initial, mais il fautla lâcher dès que la commande est active !
5. Conclure sur les performances du système ainsi asservi, en relevant :� le temps de réponse à 5%� les depassements maximaux en x et en �� l�erreur en position� l�e¤et de perturbations de sorties (en x et en �)� l�e¤et d�une perturbation de commande.

24 CHAPITRE 4. PENDULE INVERSÉ

Deuxième partie
OPTION A&S
25


Chapitre 5
Bille sur poutre
5.1 Description de la maquette
Le processus est une bille qui roule sans glisser sur poutre en rotation autourd�un axe médian perpendiculaire à la poutre. Cette rotation est créé par un moteurà courant continu qui fournit une force U(t) transmise à la poutre par une courroiede transmission (voir Figure 5.1).
������
������
������
������
������
������
����
������
������
������
������
������
������
����
CC
CC
���
AAA}
����
u
uaaaaaaaaaaaaaaaaaaaaa ������������������
CCCCCCO
��������������9
y
x �
courroie de transmission
bille
poutre
Fig. 5.1
� L�angle � de la poutre par rapport à l�horizontale est mesuré par un codeurincrémental monté sur l�axe de rotation (INCHA et INCHB correspondantsaux canaux A et B, 20000 incréments/tour).
27

28 CHAPITRE 5. BILLE SUR POUTRE
� La position x de la bille sur la poutre est lue par une caméra CCD, 25V=m,limitée à �10 V .
� Le moteur est commandé en courant, en mode manuel ou par PC, par unvariateur (servo-motor) dont le transfert est assimilable à un gain de 2:15N=V:stop : permet de déconnecter le signal d�entrée du variateur.
� Trois type de commande sont disponibles (voir Figure ci-dessous) :
a) en manuel : le signal est envoyé au variateur tant que l�interrupteur estappuyé ; ensuite la dernière valeur est maintenue.
b) par le PC : via le connecteur 50 broches (face arrière)c) en externe : arrêt de la commande en appuyant de nouveau sur start ou en
appuyant sur stop.
5.2 Environnement PC pour l�acquisition et lacommande
1. Acquisition de l�angle � par la carte MFIO (adresse 280H)Cette carte possède 3 entrées codeur ABZ. A et B sont reliées par l�intermé-diaire du bornier à INCOCHA et INCOCHB respectivement. La lecture del�angle � se fait sous VisSim par le bloc MFIO encodeur de -1000 (gauche) à+1000 (droite), canal 0.
2. Acquisition de la position x par la carte RTI815 (adresse 320H)
a) Le signal position du rack est directement envoyé à l�entrée I+ ou I- de lacarte RTI 815 qui se charge de la conversion analogique/numérique. Laposition récupérée n�est pas très précise.
b) L�image numérique est envoyée à la carte MFIO par l�intermédiaire de sesentrées digitales. La caméra récupère l�image de la position x dans un

5.3. ETUDE TECHNIQUE DU SYSTÈME 29
registre dont la valeur, codée sur 12 bits, est lue sur 2 � 8 bits (DIN0 àDIN7) multiplexés en deux rafales controlées par le contenu du bit Dout3(camera control register).
� Si Dout3 = 1, on lit les bits de 0 à 7:� Si Dout3 = 0, on lit les bit de 8 à 11:� Le gel de l�activité de la caméra pendant la lecture est géré par le bit Dout4.� Le bornier �position� relie DIN0 à DIN7 à 8 entrées digitales de la carteMFIO.
� Le programme �camera�réalise la lecture du registre suivants les 6 étapessuivantes :
i) bloquer la mise à jour du registre avec le Dout4 = 0 (camera hold),
ii) mettre à 1 Dout3 (camera control register),
iii) lire les 8 premiers bits du registre et les stocker,
iv) mettre à 0 Dout3
v) lire les 4 bits restants et les stocker
vi) �n : mettre à 1 Dout4
3. Le moteur peut être commandé :
� a) par la carte RTI 815 : sa sortie analogique, �10V DAC1 canal 0, est envoyéedirectement à l�entrée du moteur ;
b) par la carte MFIO : le signal de commande est transmis par la connectique50 broches (pin 47).
5.3 Etude technique du système
1. Proposer un schéma fonctionnel du système bille-poutre asservi par retour uni-taire à l�aide d�un régulateur RC en faisant apparaître les éléments dé�nis dansla description de la maquette ainsi que les di¤érentes variables. On précisera enparticulier avec soin l�actionneur, les capteurs et les interfaces CAN et CNA.
2. Ecrire le grafcet du programme �camera� qui réalise la lecture du registrecontenant l�information de la position x lue par la camera CCD, les transitionsétant assurées par une horloge à fréquence variable.
3. Calibrer la sortie du bloc codeur MFIO3a pour lire l�angle réel � en radians.
4. Ecrire le programme VisSim permettant la conversion en hexadécimal du motx sur 12 bits.
30 CHAPITRE 5. BILLE SUR POUTRE
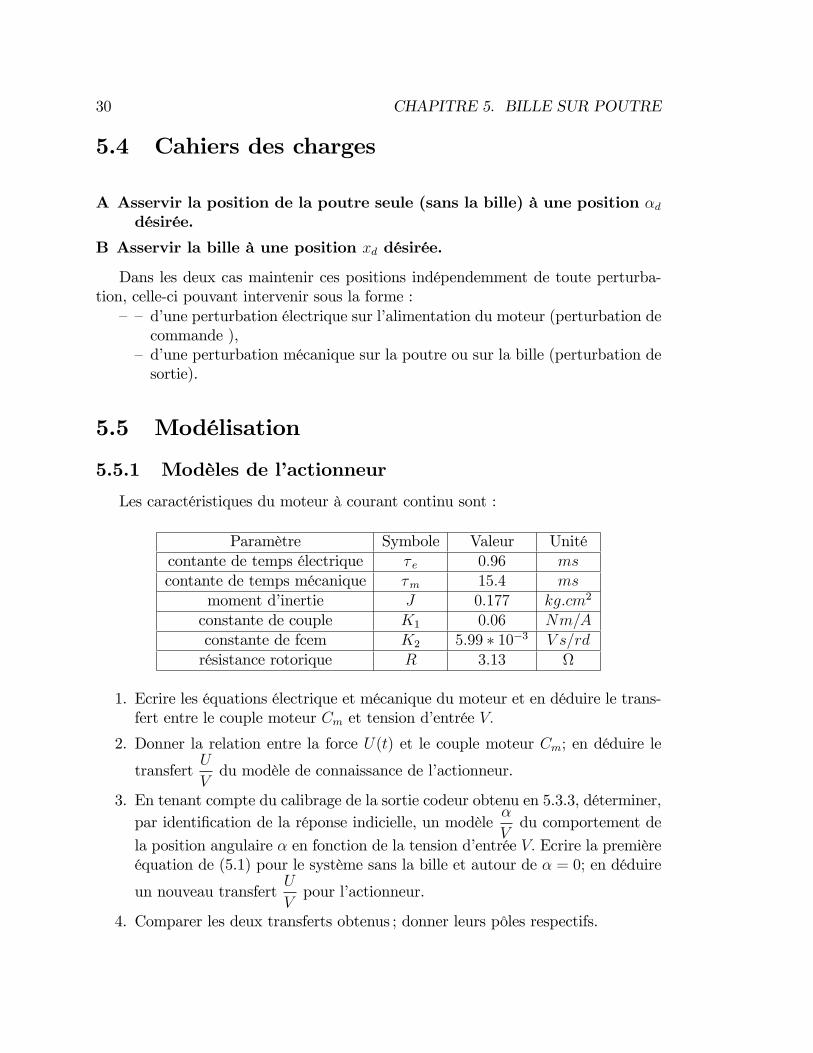
5.4 Cahiers des charges
A Asservir la position de la poutre seule (sans la bille) à une position �ddésirée.
B Asservir la bille à une position xd désirée.
Dans les deux cas maintenir ces positions indépendemment de toute perturba-tion, celle-ci pouvant intervenir sous la forme :� � d�une perturbation électrique sur l�alimentation du moteur (perturbation de
commande ),� d�une perturbation mécanique sur la poutre ou sur la bille (perturbation desortie).
5.5 Modélisation
5.5.1 Modèles de l�actionneur
Les caractéristiques du moteur à courant continu sont :
Paramètre Symbole Valeur Unitécontante de temps électrique � e 0:96 mscontante de temps mécanique �m 15:4 ms
moment d�inertie J 0:177 kg:cm2
constante de couple K1 0:06 Nm=Aconstante de fcem K2 5:99 � 10�3 V s=rdrésistance rotorique R 3:13
1. Ecrire les équations électrique et mécanique du moteur et en déduire le trans-fert entre le couple moteur Cm et tension d�entrée V:
2. Donner la relation entre la force U(t) et le couple moteur Cm; en déduire le
transfertU
Vdu modèle de connaissance de l�actionneur.
3. En tenant compte du calibrage de la sortie codeur obtenu en 5.3.3, déterminer,par identi�cation de la réponse indicielle, un modèle
�
Vdu comportement de
la position angulaire � en fonction de la tension d�entrée V: Ecrire la premièreéquation de (5.1) pour le système sans la bille et autour de � = 0; en déduire
un nouveau transfertU
Vpour l�actionneur.
4. Comparer les deux transferts obtenus ; donner leurs pôles respectifs.

5.5. MODÉLISATION 31
5.5.2 Modèle de l�ensemble bille + poutre1
Le comportement de la courroie de transmission est modélisé par un frottementvisqueux de constante b et un ressort de raideur k; appliqués, comme U(t), à l�ex-trémité de la poutre cf. �gure 5.2.
������
������
������
������
������
������
����
������
������
������
������
������
������
����
CC
CC
���
AAA}CCCCCCCCCCCCCCCCCCO
�����9
y
x
�
6
U(t)
l
������
������
������
��:
9
CCCCC���
������
������
���
CCC
CCCC
���CC C
C��bCC
CCXXXXXXXX
������
k
�����CCCC
�����������
�������
Fig. 5.2
L�écriture des équations de Lagrange pour le système bille-poutre soumis à laforce U(t) et en présence du frottement visqueux b et du ressort k conduit au modèlenon linéaire suivant :8>><>>:(Ip + Ib +mx
2 +mr2)::�+
�Ibr�mr
�::x+ (2mx
:x+ bl2)
:�+ kl2�+mgx cos� = U(t)l cos��
m+Ibr2
�::x+
�Ibr�mr
�::�+mg sin��mx :�2 = 0
(5.1)où les paramètres sont dé�nis dans le tableau ci-dessous.
1Cette partie est à préparer avant le TP.

32 CHAPITRE 5. BILLE SUR POUTRE
Paramètre Symbole Valeur UnitéBille(acier)masse m 0:27 Kg
rayon utile r 0:018 mmoment d�inertie Ib 4:32 � 10�5 Kgm2
Poutredemi-longueur l 0:49 m
moment d�inertie (p+ct) Ip 1:5 � 9:35 � 10�2 Kgm2
Entrainementcoe¢ cient d�amortissement b 1:0 N=ms�1
raideur k 0:001 Nm�1
1. En posant
b1 = Ip + Ib +mr2; b2 = 2m; b3 = bl
2; b4 = kl2; b5 =
Ibr�mr
a1 = m+Ibr2; a2 =
Ibr�mr;
montrer que la linéarisation de ce modèle autour d�une position d�équilibre(x0; U0; �0 = 0) conduit à :(
(mx20 + b1)::
��+ b5::
�x+ b3:
�� ++b4��+mg�x = l�U
a1::
�x+ a2::
��+mg�� = 0(5.2)
2. En déduire l�équation d�état du modèle ainsi linéarisé en prenanth�x
:
�x ��:
��iT
comme vecteur état.
3. Calculer à l�aide de Matlab les valeurs propres de la matrice d�évolution etconclure sur la stabilité du système.
4. Quel est l�ordre du système complet (moteur-courroie-poutre-bille) ? Compa-rer les dynamiques stables de l�ensemble bille-poutre à celles de l�actionneur,conclusion ?
5.6 Commande
5.6.1 Utilisation de l�environnement VisSim
1. Créer dans P : un répertoire RTI815
2. Ouvrir Professionnal VIsSIM
3. Tester la carte Analog Devices RTI815

5.6. COMMANDE 33
(a) Dans File - Real Time Con�g, véri�er la con�guration suivante (carte n�
0) :
adresse : 320H
tensions E / S : +10V -10V.
(b) Tester les entrées I+ (canal n� 0) et I- (canal n� 8) : envoyer un signal duGBF et le lire par un display ou un plot.
(c) Tester la sortie 0 (canal n� 0) : lire sur l�oscillo un signal généré parVIsSIM ; conclusions.
(d) Tester simultanément les conversions AN et NA : envoyer un signal GBFà l�entrée de la carte visualiser la sortie de la carte sur oscilloscope.
(e) Test de la commande et de l�acquisition de la position x : créer un signalsinusoïdale d�amplitude 0:8 V et de fréquence 5 rd/s sous VisSim. Envoyerce signal par l�intermédiaire de la carte RTI 815 (sortie) sur la commandeexterne du système ; récupérer la position (sensor-position) et l�envoyerà une des entrées de RTI 815 qu�on visualisera par display sous VisSim.Lancer la simulation et véri�er physiquement et sur le display que lecomportement de la bille.
Remarque 3 Pour changer de signe une entrée du sommateur �; pointer le curseursur cette entrée puis : ctrl +bouton droit de la souris.
5.6.2 Asservissement en position � de la poutre seule
1. Déterminer par la méthode d�Evans un régulateur simple assurant le cahierdes charges A pour le modèle de comportement
�
Vobtenu en 5.5.1.
2. L�implanter à l�aide de VIsSIM et le valider en testant le comportement de lapoutre en poursuite (changement de consigne �d faible) et en régulation (rejetdes perturbations sur V et sur �):
5.6.3 Asservissement de la position de la bille
1. Déterminer, à l�aide de la commande PLACE de Matlab, le gain K de retourd�état, assurant le cahier des charges B, pour le modèle obtenu en 5.5.2.4, ensupposant tout l�état mesurable.
2. Réaliser la reconstruction de l�état :
� par dérivation �ltrée des mesures ;� par un observateur réduit de Luemberger.

34 CHAPITRE 5. BILLE SUR POUTRE
3. Implanter à l�aide de VIsSIM la loi de commande obtenue (observateur + re-tour statique) puis la valider en testant le comportement de la bille en poursuite(changement de consigne xd faible) et en régulation (rejet des perturbationssur V et sur x):

Chapitre 6
Problème du chateau d�eau
6.1 Utilisation de l�environnement VisSim
1. Créer dans P : un répertoire RTI815
2. Ouvrir Professionnal VIsSIM
3. Tester la carte Analog Devices RTI815
(a) Dans File - Real Time Con�g, véri�er la con�guration suivante (carte n�
0) :adresse : 320Htensions E / S : +10V -10V.
(b) Tester les entrées I+ (canal n� 0) et I- (canal n� 8) :envoyer un signal du GBF et le lire par un display ou un plot.
(c) Tester la sortie 0 (canal n� 0) :lire sur l�oscillo un signal généré par VIsSIM ; conclusions.
(d) Tester simultanément les conversions AN et NA :� avec un �l� avec un second ordre
Remarque 4 Pour changer de signe une entrée du sommateur �; pointer le curseursur cette entrée puis : ctrl +bouton droit de la souris.
6.2 Commande du processus
Pour une ouverture de vannes �xée ( 45� pour un robinet par exemple) :
1. Relever les caractéristiques statiques suivantes :
35

36 CHAPITRE 6. PROBLÈME DU CHATEAU D�EAU
(a) conversion D / A :sortie carte (data-out) - entrée processus (Mp4)
(b) conversion D / A :sortie processus (Mp5) - entrée carte (data-in)
en déduire les formules de conversion correspondantes ;donner en particulier la relation que l�on aura, lorsqu�il n�y aura pas d�erreuren régime permanent, entre les données VIsSIM de consigne et le niveau d�eauen cm correspondant.
2. Identi�cation numérique
(a) Mettre en consigne un SBPA, autour d�un point de fonctionnement enrestant dans la zone linéaire, et relever la réponse du processus.
(b) Transférer ces valeurs sous Matlab et appliquer la méthode des moindrescarrés simple pour identi�er le transfert discret du processus.
(c) Donner F (z�1):
3. Commande en boucle ouverte
(a) Mettre un échelon de consigne autour du même point de fonctionnement(en restant dans la zone linéaire), et relever la réponse indicielle.
(b) En déduire le transfert correspondant, en tenant compte des conversionstrouvées en 1.
4. Asservissement
(a) Implanter le régulateur continu (numérisé par la carte).(b) Implanter le régulateur numérique et valider le choix de la période d�échan-
tillonnage.
6.3 Commande numérique
1. Numériser le régulateur PI par les méthodes disponibles dans VisSim. Simulerl�asservissement pour le valider, puis dans l�a¢ rmative le réaliser et relever lesperformances obtenues.
2. TP CAO 7 :� a�n de réaliser une régulation numérique, proposer une période d�échan-tillonnage T e la plus grande possible et justi�er ce choix ;
� déterminer pour cette période T e un régulateur numérique RN qui assureles cahiers des charges n� 1 et n� 2 ;
� simuler l�asservissement choisi en tenant compte de la saturation de lapompe ; interpréter.
3. Implanter le régulateur RN sur le processus réel à l�aide de VisSim Real Time.
Chapitre 7
Système de Chau¤age
7.1 Utilisation de l�environnement VisSim
1. Créer dans P : un répertoire RTI815
2. Ouvrir Professionnal VIsSIM
3. Tester la carte Analog Devices RTI815
(a) Dans File - Real Time Con�g, véri�er la con�guration suivante (carte n�
0) :adresse : 320Htensions E / S : +10V -10V.
(b) Tester les entrées I+ (canal n� 0) et I- (canal n� 8) :envoyer un signal du GBF et le lire par un display ou un plot.
(c) Tester la sortie 0 (canal n� 0) :lire sur l�oscillo un signal généré par VIsSIM ; conclusions.
(d) Tester simultanément les conversions AN et NA :� avec un �l� avec un second ordre (faire varier & et !n):
Remarque 5 Pour changer de signe une entrée du sommateur �; pointer le curseursur cette entrée puis : ctrl +bouton droit de la souris.
7.2 Commande du processus
1. Relever les caractéristiques statiques suivantes :
(a) conversion D / A :sortie carte (data-out) - entrée processus (x)
37

38 CHAPITRE 7. SYSTÈME DE CHAUFFAGE
(b) conversion D / A :sortie processus (y) - entrée carte (data-in)
en déduire les formules de conversion correspondantes ;donner en particulier la relation que l�on aura, lorsqu�il n�y aura pas d�erreuren régime permanent, entre les données VIsSIM de consigne et la température,en degrés Celsius, correspondante.
2. Identi�cation numérique
(a) Mettre en consigne un SBPA, autour d�un point de fonctionnement enrestant dans la zone linéaire, et relever la réponse du processus.
(b) Transférer ces valeurs sous Matlab et appliquer la méthode des moindrescarrés simple pour identi�er le transfert discret du processus.
(c) Donner F (z�1):
3. Commande en boucle ouverte
(a) Mettre un échelon de consigne autour du même point de fonctionnement(en restant dans la zone linéaire), et relever la réponse indicielle.
(b) En déduire le transfert correspondant, en tenant compte des conversionstrouvées en 1.
4. Asservissement
(a) Implanter le régulateur continu (numérisé par la carte).
(b) Implanter le régulateur numérique et valider le choix de la période d�échan-tillonnage.
7.3 Régulation numérique 1
1. Numériser RCA par les méthodes disponibles dans VisSim. Simuler l�asservis-sement pour le valider, puis, dans l�a¢ rmative le réaliser.
2. TP CAO 6 :� Proposer un transfert désiré en boucle fermée FBF (z�1) ayant une réponseindicielle sans erreur permaente et 10 fois plus rapide que celle de F (z�1)(sans tenir compte du retard pur). En déduire le régulateur associé (toujourssans tenir compte du retard pur).
� Simuler l�asservissement complet, en tenant compte maintenant du retard.
3. Si les résultats de simulation précédents sont corrects, réaliser cet asservisse-ment du processus et conclure.
1Toutes les simulations de cette partie sont à préparer à l�avance, hors séances de TP.

Chapitre 8
Suspension magnétique
8.1 Environnement Dspace et Test de la CarteDS1102
8.1.1 Préliminaires
� Créer dans P un répertoire Dspace� Ouvrir Matlab 5 et changer de répertoire : cd P :nDspace� Pour information : Activation/Désactivation de la carte par le ProgrammeLD31, faire démarrernexécuter.
8.1.2 Bornier
� Entrées : I2 (16 bits) : bonne résolution mais lente conversion ; I4 (12 bits) :conversion plus rapide mais moins bonne résolution
� Sorties : O1 (16 bits) ; O4 (12 bits)
8.1.3 Construction du �chier .mdl
A partir de rien
� Lancer rtilib (contient les blocks nécessaires à la réalisation des applicationstemps réels sous Simulink) en tappant rtilib dans le workspace de Matlab puisutiliser les librairies :� Simulink pour les blocks habituels (fonctions de transfert, sinks, sources,connectors, etc.).
� DS1102 pour ADC (convertisseur analogique-digital) et DAC (convertisseurdigital�analogique).
� La librairie connector de Simulink pour les ports non utilisés :
39
40 CHAPITRE 8. SUSPENSION MAGNÉTIQUE
� Terminators pour ADC� Grounds pour DAC
A partir d�un �chier .mdl existant
Lancer rtilib puis rajouter dans le �chier.mdl les blocs RTI : ADC et DAC deDS1102 avec les connecteurs (terminators et grounds) pour les ports non utilisés.
8.1.4 Manipulation
Construction du �chier du test des entrées de la carte
� Lancer rtilib et ouvrir un nouveau �chier.mdl avec Simulink.� Ramener le block DS1102 ADC.� Envoyer un signal GBF par l�intermédiaire du bornier (entrée I2 ou I4, lesdeux entrées doivent être testées l�une après l�autre).
� Attacher un scope à cette entrée.� Attacher les autres entrées avec des terminators.
Paramétrage du �chier .mdl
Ouvrir le Menu Simulation - Parameters� Dans le menu solver� Durée de la simulation = [start time, stop time] ; prendre le stop time trèsgrand pour avoir le temps de visualiser les résultats (par trace). Prendre parexemple stop� time = 1010 s (3 siècles 17 ans 35 jours 17 heures 36 minutes14 secondes 24 centièmes).
� Pas de calcul et choix de l�algorithme : dans le menu Solver Options� Prendre toujours un pas �xe dans les applications temps réels.� Si le modèle simulé est entièrement discret alors prendre l�algorithme dis-cret �no continuous state�. Le pas de calcul sera alors la plus petite périoded�échantillonnage Te trouvée dans le modèle.
� Si le modèle contient des états continus (régulateurs continus numériséspar exemple) alors prendre un pas de calcul �xe tel que :
�xed step size � 2 � 10�5 (limite de la carte).
Remarque : Un pas entre 10�4 et 10�3 donne de très bons résultats.� Menu RTW� Fichier cible rti1102.tlc : génère le code C.� Construction à l�aide de rti1102.tmf : link et compile.� La commande make_rti : gère l�ensemble des étapes de la construction.Remarques

8.1. ENVIRONNEMENT DSPACE ET TEST DE LA CARTE DS1102 41
� Cocher Retain.rtw �le dans un premier temps pour générer les paramètresdes blocs (= constantes)
� Lorsque le �chier.mdl est construit sous rtilib les paramètres du menuRTW sont mis automatiquement sinon (�chier .mdl construit hors envi-ronnement Dspace), ne pas oublier de les mettre ! ! ! ! (sources d�erreurs).
Sauvegarde
Sauvegarder votre �chier .mdl dans P :nDspace.
Construction et téléchargement
Faire Tools - RTW Build ou faire Simulation - Parameters - RTW - Build. Cecicrée 3 �chiers : �chier.c, �chier.trc (utilisé par trace et cockpit) et le �chier.obj pourla carte Dspace. Si la construction et le transfert se déroulent sans problème vousobtenez à la �n l�instruction : DOWLOAD SUCCEEDED.
Visualisation des résultats
Ouvrir l�icône Trace 31 qui est sur le bureau� Dans menu �le, faire Load Trace File pour charger le �chier.trc construitprécédemment. Il contient la liste de tous les paramètres et des sorties deblocks.
� Cliquer sur Model root pour a¢ cher les variables que l�on peut visualiser (mo-del root = la racine du �chier Simulink, premier niveau hiérarchique).
� Pour sélectionner les signaux, les mettre en noir ; pour sélectionner le signalde synchronisation, cliquer sur le bouton vert.
� Signaux disponibles :� B : sorties de blocks (variables non modi�ables)� P : Paramètres d�un block (variables modi�ables)� S : entrée de blocks �sinks�(exemple : scope)� Xc : états continus� Xd : états discrets� L : signaux étiquetés� D : dérivées
� Paramètres d�a¢ chage :� Longueur de l�axe des temps : Length.� Retard acquisition - trigger : Delay .� A¢ chage tous les n pas de calcul : Downsampling, n 2 N; l�augmenter silength trop grand (bu¤er saturé).
� A¢ chage : Start dans le Menu Trace ou Start dans la fenêtre d�a¢ chage TracePlots.

42 CHAPITRE 8. SUSPENSION MAGNÉTIQUE
� Réglage des axes (ordonnées) : dans le menu Options de la fenêtre d�a¢ chageTrace Plots faire scaling of axes (�xed = manuel ou par l�icône correspon-dante). Pour superposer deux courbes choisir l�icône de supperposition.
Test des sorties de la carte
�Ouvrir un nouveau �chier.mdl.� Ramener le block DS1102 DAC.� Construire un signal à l�aide du générateur de signaux de Simulink et l�envoyersur une des bornes (1 ou 4) de DS1102 DAC.
� Attacher les autres entrées avec des terminators.� Envoyer la sortie correspondante du bornier ( O1 ou O4) sur un oscilloscope.� Répéter toutes les étapes de la manipulation précédente pour visualiser lesignal créé.
Test liaison �l
IL s�agit d�envoyer un signal GBF sur l�entrée de la carte (I2 ou I4 de DS1102ADC) et de le récupérer sur la sortie de la carte (O1 ou O4) pour le lire sur unoscilloscope.
Démo second ordre
� Copier le �chier PT2Io de la démo dans P :nDspace.� Envoyer un signal carré (avec une grande largeur pour simuler un échelon) surl�entrée.
� Envoyer la sortie du bornier sur l�oscilloscope.� Paramétrer, construire, télécharger et lancer la simulation pour visualiser cettesortie.
� Faire varier & et !n du second ordre en l�ouvrant à l�aide du bouton droit dela souris (look under mask) ou double clique (damping et bandwidth).
8.2 Implantation d�un régulateur sur la maquettesuspension
Il s�agit d�implanter les régulateurs que vous avez conçus en TD pour la suspen-sion magnétique et d�en apprécier les performances.

8.2. IMPLANTATIOND�UNRÉGULATEUR SUR LAMAQUETTE SUSPENSION43
8.2.1 Implémentation du PID
� Implémenter le PID continu obtenu par la méthode d�EVANS en le numérisantpar la carte.� On pourra utiliser le �chier pidsusp.mdl qui reprend les paramètres du pan-neau de commande analogique.
� Les coe¢ cients sont règlables à l�aide de cockpit (icône du bureau) et du�chier pidsuspcoc.ccs. Conclusions (choix de Te, comparaison avec le PIDanalogique réel, comparaison avec la simulation).
� Visualiser le signal de commande sur l�oscilloscope.
8.2.2 Implémentation d�un autre type de commandes
� Implémenter le régulateur obtenu par débouclage d�un transfert optimal deGraham-Lathrope et visualiser le signal de commande sur l�oscilloscope.
� Implémenter la commande par retour d�état obtenue en TP CAO; visualiserle signal de commande sur l�oscilloscope.
� Conclusion comparative.

44 CHAPITRE 8. SUSPENSION MAGNÉTIQUE
Chapitre 9
Pendule inversé
9.1 Identi�cation et commande numérique
9.1.1 Identi�cation du modèle numérique du chariot
1. Relever la réponse du chariot à un S.B.P.A..
2. Récupérer sous Matlab les données entrée / sortie.
3. Appliquer la méthode d�identi�cation au sens des moindres carrés pour obtenirun modèle échantillonné MD (z�1) du chariot.
4. Utiliser la fonction d2c de Matlab pour obtenir un modèle continuMDC (p) àpartir deMD (z�1) : Comparer ce modèleMDC (p) au modèle continu obtenuen 1-2-4.
9.1.2 Commande numérique du chariot
1. Déterminer un régulateur numérique permettant d�asservir le chariot à uneposition désirée xd sans erreur, sans dépassement, et en 0.5s.
2. Relever les résultats de simulation Matlab.
3. Si ces résultats sont satifaisants, implémenter la commande à l�aide de VisSim.
4. Conclusions ?
9.1.3 Commande numérique du système chariot + pendule
1. Ouvrir sous VisSim le �chier IPVSD disponible dans SOURCES. Justi�er lechoix de la période d�échantillonnage et préciser comment est réalisée la re-construction des variables d�état _x et _� de l�état.
45

46 CHAPITRE 9. PENDULE INVERSÉ
2. En positionnant le chariot à mi-course ainsi que le capteur de position ( faire5 tours à vide), réaliser la commande et relever les réponses à un échelon deconsigne de 20 cm en position.
3. Conclure sur les performances du système ainsi asservi, et les comparer aveccelles obtenues en continu.