vem nemlinearis elso eloadas
TRANSCRIPT

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 1
Nemlineáris végeselemek
Előadásvázlat
2009
Bojtár Imre Gáspár Zsolt

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 2
BEVEZETÉS
Ez a segédlet a BME Építőmérnöki Karán az MSc képzésben oktatott Nemlineáris végeselemek módszere című tantárgy előadásainak vázlatát tartalmazza, követve a 14 hetes képzésben elhangzott legfontosabb tudnivalókat. Célja, hogy a hallgatók számára segítséget nyújtson a tárgy alapjainak elsajátításához.
A szerzők Mottó: A természet nemlineáris. /A „Marc” szoftver-cég jelmondata/

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 3
1. előadás: A nemlináris hatások mérnöki jelentősége. A Lagrange- és az Euler-féle leírásmód
Nemlineáris mechanikai feladatok mérnöki szempontból fontosabb típusai
A mérnöki feladatok megoldása során egyre gyakrabban merül fel az igény a számítások „klasszikus” lineáris módszereitől való eltérésre. Ezt két dolog indokolja:
- a pontosabb eredményekre való törekvés miatt már nem alkalmazhatjuk a korábban szokásos, lineáris modellekhez vezető elhanyagolásokat, illetve - az új típusú szerkezetek vizsgálata eleve nem lineáris modellezést igényel.
A „ nem lineáris” vizsgálati módszer fogalmának megértéséhez és a mérnöki gyakorlatban használatos fontosabb változatainak definiálásához [ ]1 alapján bemutatunk néhány elemi
mintapéldát: Példa: Elemezzük a képen látható inga mozgását!
1.1. ábra: Ingamozgás vizsgálata
Az O ponton felfüggesztett, l hosszúságú súlytalan szálon mozgó m tömegű inga esetén Newton második törvényét felhasználva (x irányú vetületi egyenletként felírva):
2 2
2 2sin sin 0
d d gmg ml
dt dt l− = ⇒ + =θ θθ θ , (1.1)
ahol θ az elfordulást jelző szög, t az idő, v pedig az x irányú sebesség. Az elfordulások időbeli változásának vizsgálata (ω a szögsebességet jelöli) tehát egy
2
0 02sin 0, 0 , (0) , (0)
d g dt T
dt l dt
θ θθ θ θ ω+ = < ≤ = = (1.2)
nemlineáris differenciálegyenlethez (~ kezdetiérték-feladathoz) vezet, ahol a t = 0 pillanatban adottak a mozgás kezdeti értékét jellemző paraméterek ( )0 0,θ ω .
Ha az elfordulási szög kicsi ( )sinθ θ≈ , akkor a feladat egy egyszerű harmonikus
mozgást leíró lineáris differenciálegyenletté alakul:
2
2 22
0, ahold g
dt l+ = =θ λ θ λ . (1.3)
A lineáris differenciálegyenlet analitikus megoldása:

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 4
( ) sin cost A t B tθ λ λ= + , (1.4) ahol A és B állandók értékeit a kezdeti feltételekből lehet meghatározni:
00,
vA B θ
λ= = , (1.5)
így:
00( ) sin cos
vt t tθ λ θ λ
λ= + . (1.6)
Gyakori alakja a fenti megoldásnak a zérus kezdeti sebesség feltételezésével kapott végeredmény: 0( ) cost tθ θ λ= . (1.7)
Ha a nemlineáris kezdetiérték-feladatot akarjuk megoldani, akkor (és ez a legtöbb későbbi nemlineáris feladatra ugyanígy igaz) iterációs közelítő eljárást kell használnunk. Jelen esetben egy egyszerű differenciamódszeres technika segítségével úgy kapunk gyorsan eredményt, ha először a másodrendű (nemlineáris) differenciálegyenletet felírjuk két darab elsőrendű kapcsolt (nemlineáris) differenciálegyenlet segítségével:
2, sind d
dt dt
θ ω=ω =−λ θ , (1.8/a)
vagyis mátrixos formában:
( )uf u,t
t
∂ =∂
, ahol ( )( )
002
0
tu , f , u .
t sin
= = = −
θ θωω ωλ θ
(1.8/b)
Ha az u függvény 1it + időbeli ismeretlen értékét akarjuk meghatározni a it időpontbeli
ismert érték segítségével, akkor a függvény elsőrendű deriváltjának felhasználásával a következőket kapjuk:
11
1
( ) ( )( , ) ( , ) ( , )
i
i ii i i ii i
t t i i
u t u tdu duf u t f u t u u t f u t
dt dt t t+
+= +
−= ⇒ ≈ = ⇒ = + ∆ ⋅
−, (1.9)
ahol 1( )i i i iu u t és t t t+= ∆ = − . Az eljárást a t0 = 0 időpontbeli 0u kezdeti értékkel indítjuk. Az
eljárást Euler-féle explicit módszernek hívjuk, végeselemes alkalmazásait a későbbiekben részletesen tárgyaljuk. Az előbbi algoritmus segítségével:
21 1, sini i i i i it t+ +θ = θ +∆ ω ω =ω −∆ λ θ . (1.10)
Ezt a két számítást mindig az előző lépésben kiszámított (,i iθ ω ) értékpárra kell építeni (a t =
0 pillanatban a kezdeti értékekkel (0 0,θ ω ) kell dolgoznunk).
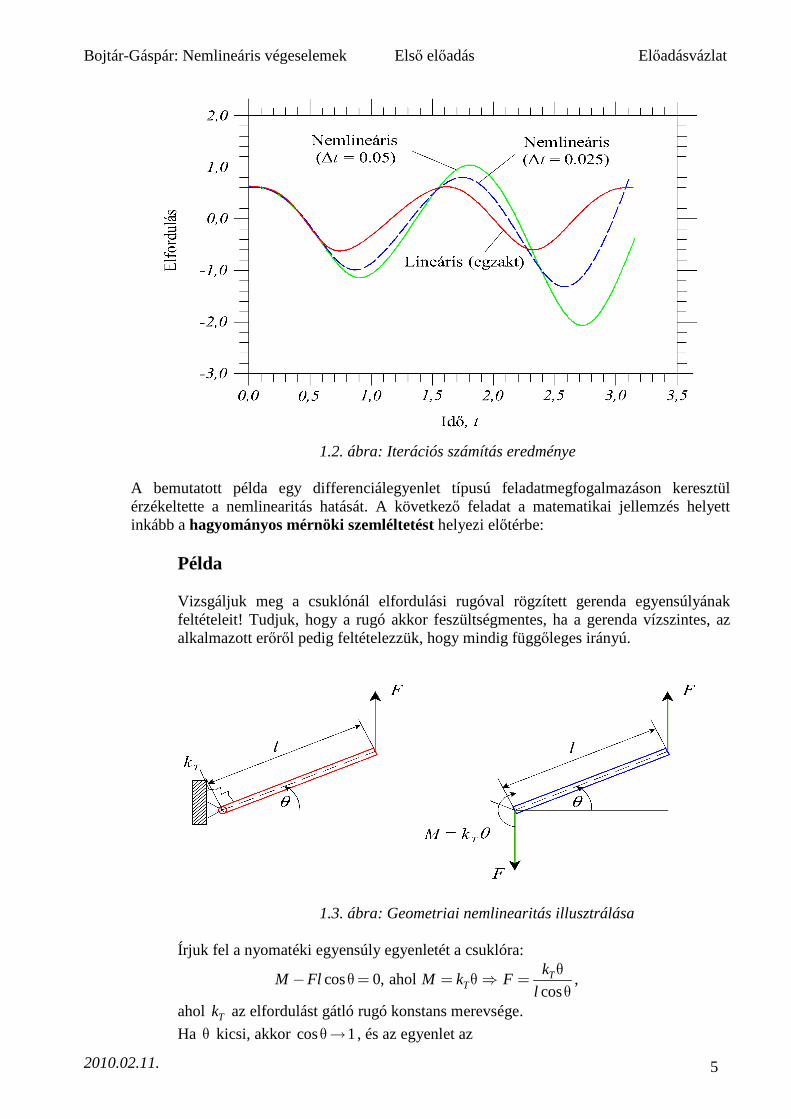
Két különböző t∆ időintervallumot ( 0,05 és 0,025t t∆ = ∆ = ) és mindkettőnél 0 / 4θ =π
kezdeti elfordulást figyelembe vevő iterációs számítás eredményét láthatjuk a következő ábrán:
Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 5
1.2. ábra: Iterációs számítás eredménye A bemutatott példa egy differenciálegyenlet típusú feladatmegfogalmazáson keresztül érzékeltette a nemlinearitás hatását. A következő feladat a matematikai jellemzés helyett inkább a hagyományos mérnöki szemléltetést helyezi előtérbe:
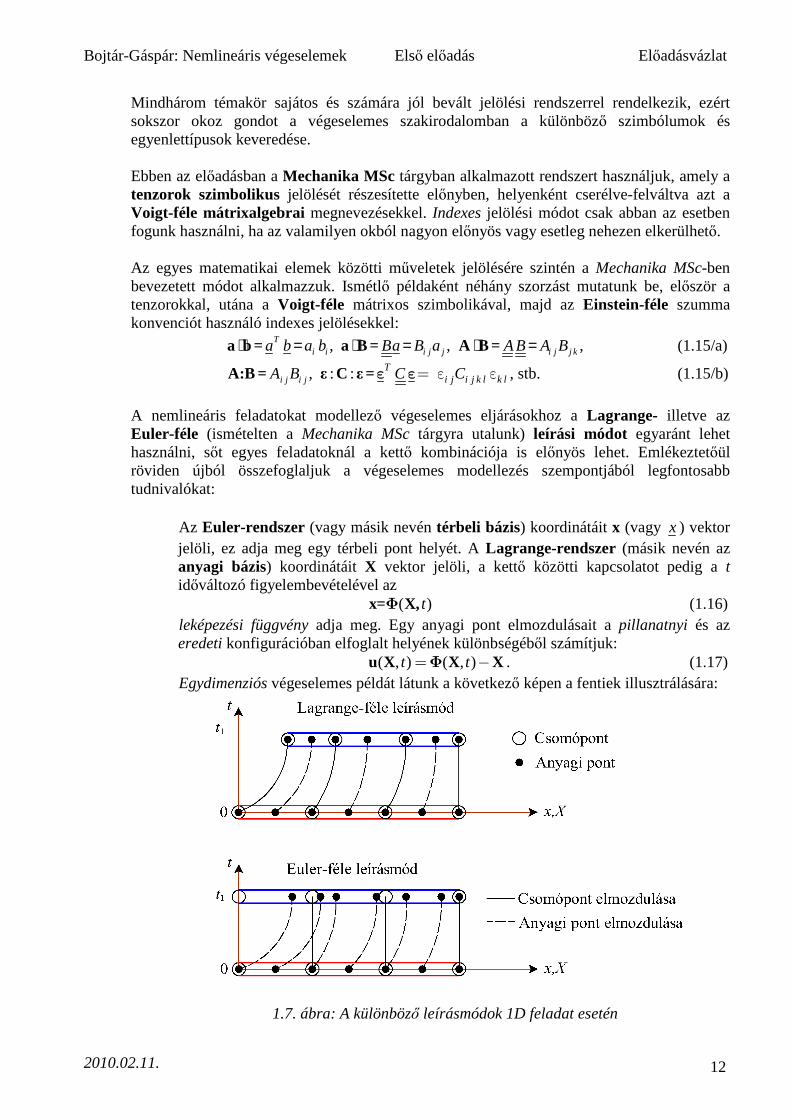
Példa Vizsgáljuk meg a csuklónál elfordulási rugóval rögzített gerenda egyensúlyának feltételeit! Tudjuk, hogy a rugó akkor feszültségmentes, ha a gerenda vízszintes, az alkalmazott erőről pedig feltételezzük, hogy mindig függőleges irányú.
1.3. ábra: Geometriai nemlinearitás illusztrálása Írjuk fel a nyomatéki egyensúly egyenletét a csuklóra:
cos 0, aholcos
TT
kM Fl M k F
l
θ− θ = = θ ⇒ =
θ,
ahol Tk az elfordulást gátló rugó konstans merevsége.
Ha θ kicsi, akkor cos 1θ→ , és az egyenlet az

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 6
TkF
l
θ=
lineáris egyenletre redukálódik. Az egyensúlyi erő két képlete közötti különbséget jól érzékelteti a következő ábra: 1.4. ábra: A geometriai nemlinearitás hatása A nemlinearitást ebben az esetben a geometria változása okozta, vagyis úgynevezett geometriai nemlinearitásról beszélünk (az ingát vizsgáló előző feladat is ebbe a csoportba sorolható). Megjegyezzük, hogy ebben a példában egy adott teher értékéből nemlineáris módon számított elfordulás kisebb, mint a lineáris modellé. Ezért a most megvizsgált geometriai nemlinearitást keményedő típusúnak szokás nevezni. Gyakran találkozunk a nemlinearitás másik mérnöki változatával, amelyet anyagi nemlinearitásnak hívnak. A most bemutatott példánál akkor kell ezzel a hatással dolgoznunk, ha a nyomaték-elfordulás összefüggés nemlineáris: 0 1( ) , (például : )T TM k k k k= θ θ = − θ ,
ahol 0 1k és k mérések által meghatározandó paraméterek. Ha mindkét hatást
egyszerre kell figyelembe vennünk, akkor kombinált anyagi-geometriai nemlinearitásról beszélünk. A következő tájékoztató ábra az erő és az elfordulás kapcsolatát mutatja az anyagi nemlinearitás esetére három különböző pozitív rugóállandó esetén (lineáris geometriai összefüggést használva). Jelen esetben a nemlineáris hatás alapján számított elfordulások nagyobbak, mint a lineáris esetben, ezért ezt a nemlineáris változatot lágyulási típusúnak hívjuk.

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 7
1.5. ábra: Anyagi nemlinearitás hatása A mérnöki feladatoknál előforduló nemlinearitások harmadik típusára láthatunk példát
a következő képen:
1.6. ábra: Érintkezési feladat Izotrop, homogén, lineárisan rugalmas anyagi viselkedésű 2L hosszúságú, állandó A keresztmetszetű rudat középen P erő terhel. A rúd végén 0u értékű szabad elmozdulás
jöhet létre (ez az elmozdulás kicsiny a rúd teljes hosszához képest). A középen ható koncentrált teher miatt a két fél rúdszakaszra felírható peremérték-feladatot kapcsolni

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 8
kell. A peremfeltételek függnek a C pont eltolódásától. A két fél rúdon nincs teher, így mindkettőnél a differenciálegyenlet:
2
20
d uEA
dx= . (1.11)
Ha ( ) 02u L u≤ , akkor a peremfeltételek: ( ) ( )0 0 2 0du
u , EA Ldx
= = , a kapcsolási
feltétel a függvény folytonosságának megkövetelésén kívül1:
( ) ( )0 0du du
EA L L Pdx dx
− − + =
. (1.12)
Ha az előbbi peremérték-feladatnál ( )2u L eléri 0u értékét, akkor a második
peremfeltétel ( ) 02u L u= alakra módosul2.
Ezen kapcsolt peremérték-feladatok megoldásai: Ha ( ) 02u L u≤ (vagyis 0P EAu / L≤ ), akkor
( ) ha 0
ha 2
Pxx LEAu x
PL L x L
EA
≤ ≤= ≤ ≤
, (1.13)
ha pedig 0P EAu / L≥ , akkor
ha 0
2( )(2 )
ha 22
Pxx L
EAu xP L x
L x LEA
≤ ≤= − ≤ ≤
. (1.14)
Ekkor a középső pont eltolódása: 2B
PLu
EA= .
Ahogy az ábrán is látható volt, az erő-elmozdulás diagram bilineáris. Ezt a fajta feladatot érintkezési (vagy peremfeltételi) nemlinearitásnak hívják3.
Megjegyezzük, hogy a számítástechnika fejlődése ma már lehetővé tette a korábban numerikusan megoldhatatlannak tekintett, úgynevezett kapcsolt feladatok vizsgálatát is. Olyan mechanikai problémák tartoznak ide, amikor két (vagy több), önmagában is nemlineárisnak tekinthető, de elméletileg más-más típusú matematikai modellel leírható feladatot együttesen vizsgálunk: Gondoljunk például egy rugalmas falú csőben áramló folyadék komplex elemzésére. A folyadék időfüggő áramlása önmagában nemlineáris feladatot jelent, amit (merev falú cső esetén) a jól ismert Navier-Stokes-egyenletek megoldásával számítunk. Ha a cső fala rugalmas, a folyadék nyomásának hatására kitágul, így megváltozik az a kiindulási peremfeltétel-rendszer, amivel eredetileg a feladatot
1 Itt az L-0, illetve az L+0 nulla arra utal, hogy az L helyen a bal oldali, illetve a jobb oldali deriváltat kell számítani. 2 Megjegyezzük, hogy egy másodrendű közönséges differenciálegyenlethez mindig két peremfeltétel tartozik, és a kapcsolásuknál is két összekötő feltétel kell. Most az egyik a folytonosság megkövetelése volt. 3 Természetesen egy szerkezetnél egyszerre lehetnek geometriai, anyagi és érintkezési nemlinearitások is.

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 9
megoldottuk, a fal szempontjából pedig változó terhelést jelent a folyadékból kapott nyomó- és nyíróterhelés. Még tovább bonyolítja a feladatot, ha a folyadék áramlási tulajdonságai időben gyorsan változók (például egy keringési rendszerben áramló vér hatását vizsgáljuk). A rendszert tehát együttesen kell vizsgálni, pontosabban a külön-külön megoldandó feladatok állandó iterációs kapcsolatát kell megoldani. Nagyon sok más hasonló típusú feladat létezik a mechanikában (hőmérsékleti hatások és statikus/dinamikus terhek együttes kezelése, áramló talajvízzel terhelt talajok és épületek kölcsönhatása, stb). Ezeket a „nemlinearitás mechanikai jellege” szempontjából nem kell új osztályba sorolnunk, de azt tudnunk kell róluk, hogy numerikus vizsgálatuk általában nagyon bonyolult, és minden esetben gondosan ellenőrzött és „kézben tartott” megoldási stratégiát kíván. A jegyzet írásának időpontjában ez az irányzat tekinthető az egyik legdinamikusabban fejlődő numerikus technikának.
----------------------
Ebben a jegyzetben alapvetően az építőmérnöki gyakorlat geometriai és anyagi nemlinearitási problémáihoz tartozó különböző feladatok végeselemes vizsgálataival foglalkozunk, az érintkezési nemlineáris vizsgálatokra és a kapcsolt feladatokra most nem térünk ki. A fenti példákból is levonható az a következtetés, hogy a nemlineáris feladatok vizsgálatának közös jellemzője lesz az alábbi három szempont: - megoldásuk során a szuperpozíció nem alkalmazható, - a terhelés teljes történetét kell figyelembe venni a vizsgálat során,
- a kiindulási állapot jellemzői jelentősen befolyásol(hat)ják a terhelés hatására létrejövő állapotjellemzőket.
A nemlineáris feladatok végeselemes modellezésének kialakulása A végeselemes modellezésben szinte már a legelső számításoknál megjelentek a különféle nemlineáris feladatok vizsgálatára vonatkozó törekvések. Turner, Clough, Martin és Topp 1956-ban publikált híres cikke (amelyet a mai értelemben vett végeselemes számítások megalapozójának tekintenek) után számos kutató azonnal kísérletet tett a módszer alap- (vagyis lineáris) változatának kiterjesztésére. Az első mai értelemben vett nemlineáris programcsomag a NONSAP (Nonlinear Structural Analysis Program) alapvetően nemlineáris egyensúlyi feladatok vizsgálatára készült az amerikai Berkeley egyetemén az 1960-as évek elején. Ezt követte Pedro Marcal szervezésben a Brown Egyetemen (1969-ben) a MARC megszületése, ami azóta hatalmas nemzetközi szoftvercéggé fejlődött. Ipari környezetben, a Westinghouse kutatóközpontjában jött létre ugyancsak 1969-ben John Swanson irányításával az ANSYS rendszere (ugyancsak nemzetközi szoftveróriássá nőtt az azóta eltelt évtizedek alatt, s egyes területeken, mint például az áramlástani és szilárdtest-mechanikai feladatok kapcsolt változatainál és az anyagi nemlinearitási feladatoknál a XXI. század elején az egyik leghatékonyabb programnak tekinthető). David Hibbitt és Klaus-Jürgen Bathe voltak a fő fejlesztői a ma ABAQUS néven ismert és különösen Amerikában ma is nagyon népszerű szoftverrendszernek (1972 a megjelenés éve).

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 10
Bathe egy másik ismert nagy rendszer, az ADINA fejlesztésében is részt vett ezekben az években. Megjegyezzük, hogy a nemlineáris végeselemes programok alapjainak kifejlesztésben a Berkeley Egyetemnek múlhatatlan érdemei vannak. Az 1960 és ’80 közötti időszakban nagyon színvonalas kutatói gárda dolgozott itt, példaként említünk a mechanika sok más területén is ismert néhány nevet: Hughes, Taylor, Simo, Bathe, Felippa, Bergan, Willam, Ramm, Ortiz, stb. Ma Belytschko, Liu és mások folytatják az ott megkezdett munkát. A személyi számítógépek megjelenése, majd egyre növekvő kapacitásuk az utóbbi tízegynéhány évben a nemlineáris végeselemes technikát is forradalmasította. A számítások közül nagyon sok gyakorlati feladat ma már futtatható viszonylag egyszerű, hétköznapi környezetben is (és ez fokozottan igaz sok építőmérnöki feladatra), bár természetesen a feladatokkal szemben támasztott igények mindig legalább olyan mértékben nőttek a közelmúltban, mint a számítástechnikai fejlesztések. Ma már többnyire nem a kutatói, hanem a rutin tervezői gyakorlat feladatai közé tartozik egy repülőgép, vagy egy autó sokmillió ismeretlenes vázának dinamikus vagy éppen törési tesztje (az úgynevezett „full scale test”-ek), a speciális, bonyolult ipari problémák megoldása (például nagyméretű, bonyolult alakú tárgyak hideg vagy meleg alakítása), vagy egy komplex építőmérnöki feladat (például egy metróalagút, a környező talaj és a felette levő épület együttesének) egyszerre történő nemlineáris vizsgálata. Ezek természetesen még ma is különleges számítógépes kapacitásokat igényelnek, az igény a „csúcsteljesítményű” gépekre tehát mindig élni fog, de a gyakorlati feladatok számításának zömét ma már inkább a „jobb minőségű”, de egyébként rutinszerűen hozzáférhető gépek végzik. A nemlineáris feladatok végeselemes modellezésének alapvető kérdései
A nemlineáris feladatok végeselemes szimulációinál alkalmazott technikai lépések sok tekintetben hasonlítanak a lineáris feladatoknál alkalmazottakhoz, de a részletekben és azok súlyában jelentős eltérések is vannak. A legfontosabb általános kérdések: a./ Modellalkotás
A számítandó modell létrehozása az egész munka egyik leglényegesebb lépése. A ’90-es évek közepéig a végeselemes modell tulajdonképpen nem jelentett mást, mint a mechanikai modell egyszerű kiterjesztését, arra törekedve, hogy lehetőleg a legegyszerűbb formát hozzuk létre a számításhoz. Ehhez képest a mai mérnöki vizsgálatokban általában erősödött az igény a komplex, minél több hatást kezelni tudó modellek iránt (így például egy szerkezet vizsgálatánál természetes követelmény, hogy ugyanaz a végeselemes modell kezelni tudjon egy statikai vizsgálatot, egy hőtani analízist vagy ütközési tesztet, stb.). A jelen és a közeljövő egyre inkább a „virtuális” feladatkezelés megoldása felé mozdítja el a mérnöki megoldásokat (a nagymodell-kísérletek és egyéb költséges mérések számának csökkentése érdekében), és ezt a követelményt a komplex, többféle vizsgálatra alkalmas, többféle szerkezeti elemet összefogó modelleknek is figyelembe kell venniük.
Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 11
B./ A mérnöki feladatok matematikai háttere A nemlineáris feladatoknál különösen fontos, hogy megfelelő megoldási technika illeszkedjen a mechanikai feladatokat leíró matematikai egyenletekhez (Ritz- vagy Galjorkin-típusú technika, stb.). Ügyelnünk kell a megoldásnál használt mérési adatok helyes alkalmazására is, vagyis az input paraméterek kapcsolatára a feladat megoldására alkalmas (és páronként összeillően választott!) alakváltozás- és feszültségrendszerekhez. Ez a lineáris modelleknél nem volt különösebben bonyolult feladat, hiszen egyféle feszültségtenzort és egyféle alakváltozástenzort használtunk, azonban nemlineáris feladatoknál jóval komplikáltabb a helyzet (lásd a Mechanika MSc tárgy keretében bemutatott feszültség- és alakváltozástenzorok különböző változatait). A finitizált feladat numerikus megoldásaihoz is gondosan kell kiválasztani a megfelelő numerikus technikát, mert kedvezőtlen esetben nagyon hosszú futási időt igénylő számításokat kell végrehajtanunk, vagy pedig nagy hibával kapjuk az eredményeket (lásd a lengő inga számítását!). Amennyire lehetséges, elemeznünk kell a számítások során keletkező hibák nagyságát és forrását, becslést adva a megoldás stabilitására. Ez a nemlineáris feladatoknál különösen nehéz, és sajnos sok esetben nem is oldható meg egyértelműen. C./ Az eredmények értékelése A nemlineáris feladatok egyik legtöbb felhasználói felelősséggel járó része az eredmények helyes értelmezése, a hibás következtetések elkerülése. Ebben a témakörben a problémák jóval érzékenyebbek a különböző szerkezeti tökéletlenségekre, peremfeltételi és teherbeli változtatásokra, lényegesen könnyebben válnak instabillá a megoldások, és ráadásul sokszor jóval többféle végeredményt kell egymással összefüggésben elemezni, mint ahogy azt a lineáris változatokban jártas felhasználó megszokta. Alapelvként azt tudjuk tanácsolni, hogy – amennyiben lehetséges – az érzékeny paraméterek minél szélesebb csoportjának figyelembevételével kell annyi futtatást elvégezni, amennyi csak kivitelezhető, és végül az eredményeket mindig ezen alapváltozók egész skálájának hatását követve értékeljük.
A nemlineáris feladatok végeselemes modellezéshez szükséges tudományterületek és a szükséges jelölésrendszerek
Három olyan tudományterületet kell megemlítenünk, melyek megszületése óta szoros kapcsolatban vannak a következőkben bemutatandó modellezéssel:
- a „klasszikus” lineáris végeselemes számítások, és azok kapcsolata a szerkezetek mátrixszámítási módszerekre épített vizsgálataival,
- a kontinuummechanika (ezen belül alapvetően a nemlineáris feladatokat vizsgáló ág),
- a matematika (ezen belül a funkcionálanalízis, a lineáris algebra és a numerikus módszerek).
Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 12
Mindhárom témakör sajátos és számára jól bevált jelölési rendszerrel rendelkezik, ezért sokszor okoz gondot a végeselemes szakirodalomban a különböző szimbólumok és egyenlettípusok keveredése. Ebben az előadásban a Mechanika MSc tárgyban alkalmazott rendszert használjuk, amely a tenzorok szimbolikus jelölését részesítette előnyben, helyenként cserélve-felváltva azt a Voigt-féle mátrixalgebrai megnevezésekkel. Indexes jelölési módot csak abban az esetben fogunk használni, ha az valamilyen okból nagyon előnyös vagy esetleg nehezen elkerülhető. Az egyes matematikai elemek közötti műveletek jelölésére szintén a Mechanika MSc-ben bevezetett módot alkalmazzuk. Ismétlő példaként néhány szorzást mutatunk be, először a tenzorokkal, utána a Voigt-féle mátrixos szimbolikával, majd az Einstein-féle szumma konvenciót használó indexes jelölésekkel:
, , ,a b = a B = A B =Ti i i j j i j j ka b a b Ba B a A B A B⋅ = ⋅ = ⋅ = (1.15/a)
,A:B = i j i jA B : :ε C ε= T C =ε ε i j i j k l k lCε ε , stb. (1.15/b)
A nemlineáris feladatokat modellező végeselemes eljárásokhoz a Lagrange- illetve az Euler-féle (ismételten a Mechanika MSc tárgyra utalunk) leírási módot egyaránt lehet használni, sőt egyes feladatoknál a kettő kombinációja is előnyös lehet. Emlékeztetőül röviden újból összefoglaljuk a végeselemes modellezés szempontjából legfontosabb tudnivalókat:
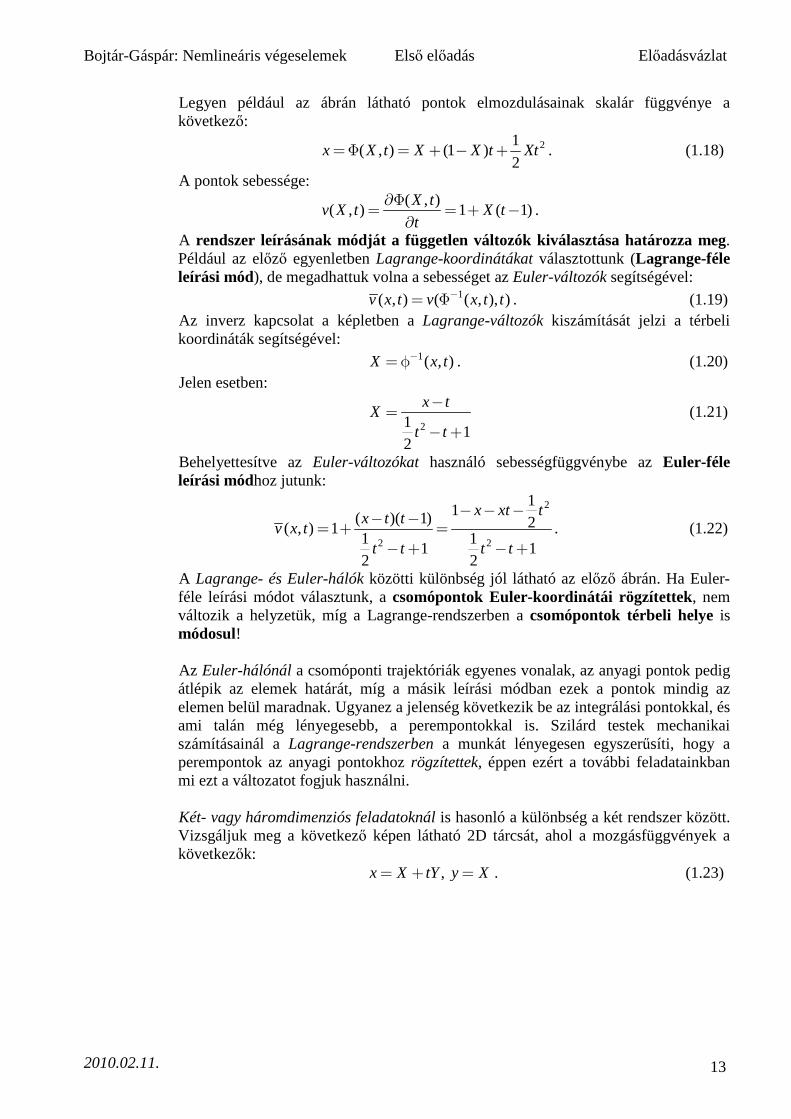
Az Euler-rendszer (vagy másik nevén térbeli bázis) koordinátáit x (vagy x ) vektor jelöli, ez adja meg egy térbeli pont helyét. A Lagrange-rendszer (másik nevén az anyagi bázis) koordinátáit X vektor jelöli, a kettő közötti kapcsolatot pedig a t időváltozó figyelembevételével az ( )x= X, tΦ (1.16) leképezési függvény adja meg. Egy anyagi pont elmozdulásait a pillanatnyi és az eredeti konfigurációban elfoglalt helyének különbségéből számítjuk: ( , ) ( , )u X X Xt t= −Φ . (1.17) Egydimenziós végeselemes példát látunk a következő képen a fentiek illusztrálására: 1.7. ábra: A különböző leírásmódok 1D feladat esetén
Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 13
Legyen például az ábrán látható pontok elmozdulásainak skalár függvénye a következő:
21( , ) (1 )
2x X t X X t Xt=Φ = + − + . (1.18)
A pontok sebessége:
( , )
( , ) 1 ( 1)X t
v X t X tt
∂Φ= = + −
∂.
A rendszer leírásának módját a független változók kiválasztása határozza meg. Például az előző egyenletben Lagrange-koordinátákat választottunk (Lagrange-féle leírási mód), de megadhattuk volna a sebességet az Euler-változók segítségével:
1( , ) ( ( , ), )v x t v x t t−= Φ . (1.19) Az inverz kapcsolat a képletben a Lagrange-változók kiszámítását jelzi a térbeli koordináták segítségével:
1( , )X x t−=φ . (1.20) Jelen esetben:
21
12
x tX
t t
−=
− + (1.21)
Behelyettesítve az Euler-változókat használó sebességfüggvénybe az Euler-féle leírási módhoz jutunk:
2
2 2
11( )( 1) 2( , ) 1
1 11 1
2 2
x xt tx t tv x t
t t t t
− − −− −= + =
− + − +. (1.22)
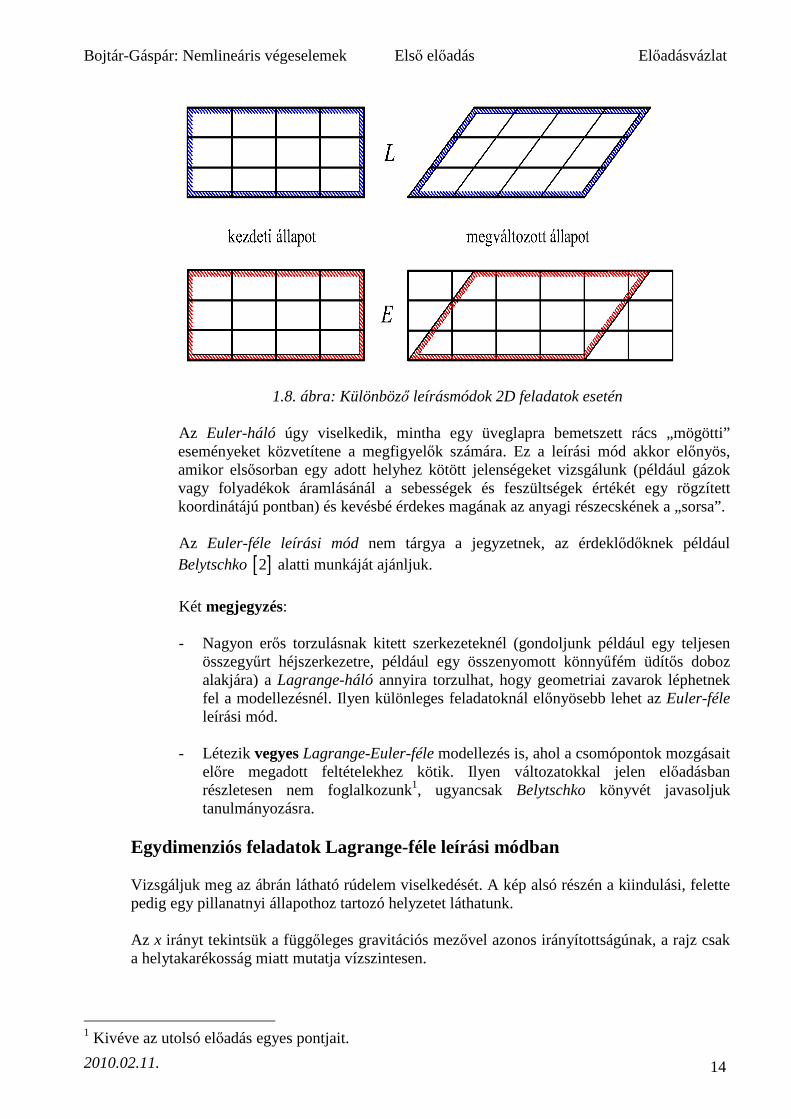
A Lagrange- és Euler-hálók közötti különbség jól látható az előző ábrán. Ha Euler-féle leírási módot választunk, a csomópontok Euler-koordinátái rögzítettek, nem változik a helyzetük, míg a Lagrange-rendszerben a csomópontok térbeli helye is módosul! Az Euler-hálónál a csomóponti trajektóriák egyenes vonalak, az anyagi pontok pedig átlépik az elemek határát, míg a másik leírási módban ezek a pontok mindig az elemen belül maradnak. Ugyanez a jelenség következik be az integrálási pontokkal, és ami talán még lényegesebb, a perempontokkal is. Szilárd testek mechanikai számításainál a Lagrange-rendszerben a munkát lényegesen egyszerűsíti, hogy a perempontok az anyagi pontokhoz rögzítettek, éppen ezért a további feladatainkban mi ezt a változatot fogjuk használni. Két- vagy háromdimenziós feladatoknál is hasonló a különbség a két rendszer között. Vizsgáljuk meg a következő képen látható 2D tárcsát, ahol a mozgásfüggvények a következők: ,x X tY y X= + = . (1.23)
Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 14
1.8. ábra: Különböző leírásmódok 2D feladatok esetén Az Euler-háló úgy viselkedik, mintha egy üveglapra bemetszett rács „mögötti” eseményeket közvetítene a megfigyelők számára. Ez a leírási mód akkor előnyös, amikor elsősorban egy adott helyhez kötött jelenségeket vizsgálunk (például gázok vagy folyadékok áramlásánál a sebességek és feszültségek értékét egy rögzített koordinátájú pontban) és kevésbé érdekes magának az anyagi részecskének a „sorsa”. Az Euler-féle leírási mód nem tárgya a jegyzetnek, az érdeklődőknek például Belytschko [ ]2 alatti munkáját ajánljuk.
Két megjegyzés: - Nagyon erős torzulásnak kitett szerkezeteknél (gondoljunk például egy teljesen
összegyűrt héjszerkezetre, például egy összenyomott könnyűfém üdítős doboz alakjára) a Lagrange-háló annyira torzulhat, hogy geometriai zavarok léphetnek fel a modellezésnél. Ilyen különleges feladatoknál előnyösebb lehet az Euler-féle leírási mód.
- Létezik vegyes Lagrange-Euler-féle modellezés is, ahol a csomópontok mozgásait előre megadott feltételekhez kötik. Ilyen változatokkal jelen előadásban részletesen nem foglalkozunk1, ugyancsak Belytschko könyvét javasoljuk tanulmányozásra.
Egydimenziós feladatok Lagrange-féle leírási módban Vizsgáljuk meg az ábrán látható rúdelem viselkedését. A kép alsó részén a kiindulási, felette pedig egy pillanatnyi állapothoz tartozó helyzetet láthatunk. Az x irányt tekintsük a függőleges gravitációs mezővel azonos irányítottságúnak, a rajz csak a helytakarékosság miatt mutatja vízszintesen.
1 Kivéve az utolsó előadás egyes pontjait.

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 15
Ismerjük a változó keresztmetszetű rúdelem kezdeti állapotához tartozó keresztmetszeti függvényt ( 0( )A X → a Lagrange-koordináták függvényében adott keresztmetszeti értékek), a
kezdeti sűrűség függvényét (0( )Xρ ), valamint az elem kezdetét és végét jelző koordinátákat,
így a teljes vizsgált tartomány kiindulási állapotát: ,a bX XΩ= . (1.24)
1.9. ábra: 1D feladat vizsgálata Ismerjük a változó keresztmetszetű rúdelem kezdeti állapotához tartozó keresztmetszeti függvényt ( 0( )A X → a Lagrange-koordináták függvényében adott keresztmetszeti értékek), a
kezdeti sűrűség függvényét (0( )Xρ ), valamint az elem kezdetét és végét jelző koordinátákat,
így a teljes vizsgált tartomány kiindulási állapotát: ,a bX XΩ= . (1.25)
A vizsgált tartomány pereme a két végpont. A kezdőponton ( u aXΓ = ) az elmozdulásokat, a
végponton ( t bXΓ = ) a terheket írhatjuk elő. A perempontokhoz a tartományból kimutató
egységvektorokat is hozzárendelünk:
1.10. ábra: 1D modell jellemző adatai

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 16
Feltételezzük, hogy ismerjük a rúd anyagmodelljét, továbbá a t=0 kezdeti pillanathoz tartozó elmozdulás- és sebességfüggvényt ( 0 0( ), ( )u X v X ), (ezzel egyenértékű megadási lehetőség a
sebességfüggvény és a kezdeti belső feszültségfüggvény ( 0 0( ), ( )v X P X ) megadása).
A továbbiakban az elmozdulás- és sebességfüggvényt a Lagrange-változók segítségével írjuk
fel: ( , ) ( , ) , ( , )du
u X t X t X v X tdt
=Φ − = . (1.26)
Feszültségváltozónak használhatjuk például az első Piola-Kirchhoff-változatot ( ( , )T X t a belső erő függvényét jelöli):
0
( , )( , )
( )
T X tP X t
A X= , (1.27)
vagy dolgozhatunk a fizikai (Cauchy-féle) feszültségekkel is:
( , )
( , )( )
T x tx t
A xσ = (1.28)
Az alakváltozási gradiens-tenzor (most skalárrá elfajuló) értékét
dx
FdX
= (1.29)
módon határozzuk meg. A rúdhoz az alábbi terhek rendelhetők hozzá:
a./ A rúd kezdetén kijelölt támaszt elmozdítjuk, vagyis uΓ -n adott egy előírt
elmozdulásfüggvény (( )u t ).
b./ A rúd másik végén – ugyancsak az idő függvényében - adott az erőteher: tΓ -n
ismert a 0( )xt t függvény.
c./ Az egész rúdelemnél (matematikailag az Ω tartományon) figyelembe vesszük az önsúlyt, vagyis Ω -n adott egy ( , )b X t függvény, amely az egységnyi tömegre ható erőket adja meg a hely és idő függvényében. (általában ez a gravitációs gyorsulás értéke (b=g), de például egy mágnesezhető anyagnál előfordulhat időben és térben változó b függvény.)
A mechanika a Lagrange-féle leírási módnak kétféle gyakorlati változatát használja. Az egyiket teljes Lagrange-, a másikat módosított Lagrange-leírási módnak hívják. Az első esetben a derivált függvényeket az anyagi koordináták segítségével számítjuk, a szükséges integrál-kifejezések (a gyenge alak) a kezdeti konfigurációt használják, feszültségtenzornak pedig valamelyik Piola-Kirchhoff-tenzort választjuk (a most tárgyalt 1D példában az első, vagy más néven nominális feszültségtenzort mutattuk be). A módosított Lagrange-leírási mód esetén a deriváltakat a térbeli koordináták figyelembevételével határozzuk meg, a gyenge alak pedig a deformált (pillanatnyi) konfigurációra épül. Ilyenkor a Cauchy-féle (vagy más néven fizikai) feszültségtenzort alkalmazzuk belső szilárdsági jellemzőként. Vizsgáljuk meg először a terhelt rúd nemlineáris viselkedését a teljes Lagrange-féle leírási mód segítségével:

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 17
A./ Teljes Lagrange-leírási mód
Foglaljuk össze először a szükséges alapegyenleteket. Ezeket már a Mechanika MSc-ben általános jelleggel megadtuk, most az 1D változat és a hozzá illeszthető végeselemes modell sajátosságait hangsúlyozzuk. - Anyagmegmaradás egyenlete
A Lagrange-rendszerben felírt 1D változat 0 0( , ) ( )X t V X Vρ ∆ = ρ ∆ (1.30)
határátmenetben igaz. Egydimenziós esetben a deformált és az eredeti állapotokhoz tartozó elemei térfogatok hányadosa a Jacobi-determináns:
0
0 00 0 0
lim limX X
V A x Adx AJ F
V A X A dX A∆ → ∆ →
∆ ∆= = = =
∆ ∆. (1.31)
A definíciónak megfelelően így 0 1J = . Ezért:
0 0 0 0( , ) ( , ) ( ) ( )X t J X t X J X J Jρ = ρ → ρ =ρ . (1.32)
Más formában is megadható az anyagmegmaradás egyenlete: 0 0FA Aρ = ρ . (1.33)
- Energiamegmaradás egyenlete
Az első Piola-Kirchhoff-feszültségtenzor (P) és az deformációgradiens-tenzor (F) segítségével írjuk fel: 0 , 0b X XW FP q sρ = − +ρɺ ɺ . (1.34)
A jobb oldal második tagja a hőáram változását, az s paraméter pedig a rendszerben levő esetleges (a tömegegységre jutó) hőforrást jelöli, Wb a fajlagos alakváltozási energia. A változók feletti pont az idő szerinti deriváltat jelöli. - Anyagegyenletek
Általános esetben az első Piola-Kirchhoff-tenzor tetszőleges számú (de laboratóriumi körülmények között mérhetőnek feltételezett!) változótól függ. Ilyen belső változó lehet például a deformációgradiens-tenzor, annak idő szerinti deriváltja, vagy bármilyen más fizikailag mérhető paraméter: ( , ) ( ( , ), ( , ),...),PFP X t S F X t F X t t t= ≤ɺ , (1.35/a) vagy ennek növekményi alakú változata: ( , ) ( ( , ), ( , ), ( , )...),PF
tP X t S F X t F X t P X t t t= ≤ɺ ɺ . (1.35/b)
Az S függvény jobb felső „PF” indexe a feszültségtenzor és az alakváltozási gradiens-tenzor közötti kapcsolatra utal. Megjegyezzük, hogy egészen egyszerű (például lineárisan rugalmas anyagú) szerkezetnél ez a két modell a
( , ) ( , ) ( ( , ) 1), ( , ) ( , ) ( , )PF PF PF PFP X t E X t E F X t P X t E X t E F X tε ε= = − = =ɺ ɺɺ (1.36/a) alakot ölti, lineáris viszkoelasztikus anyagmodell esetén pedig
( )( , ) ( , ) 1 ( , ) , vagy ( )PF PFP X t E F X t F X t P Eα ε α ε = − + = + ɺ ɺ (1.36/b)
formája lesz az anyagegyenleteknek (kicsiny deformációk esetén PFE a rugalmassági modulusnak, α pedig a csillapítási tényezőnek felel meg).
Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 18
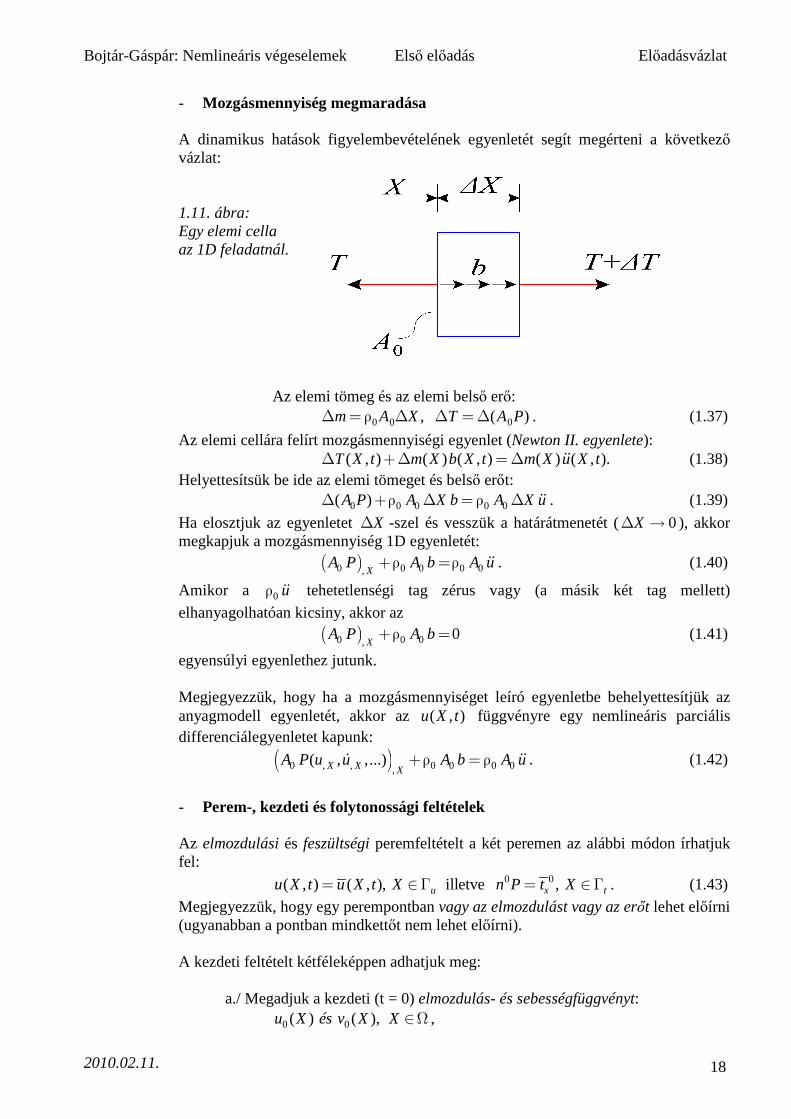
- Mozgásmennyiség megmaradása
A dinamikus hatások figyelembevételének egyenletét segít megérteni a következő vázlat:
1.11. ábra: Egy elemi cella az 1D feladatnál.
Az elemi tömeg és az elemi belső erő: 0 0 0, ( )m A X T A P∆ = ρ ∆ ∆ =∆ . (1.37)
Az elemi cellára felírt mozgásmennyiségi egyenlet (Newton II. egyenlete): ( , ) ( ) ( , ) ( ) ( , ).T X t m X b X t m X u X t∆ +∆ =∆ ɺɺ (1.38) Helyettesítsük be ide az elemi tömeget és belső erőt: 0 0 0 0 0( )A P A X b A X u∆ +ρ ∆ = ρ ∆ ɺɺ . (1.39)
Ha elosztjuk az egyenletet X∆ -szel és vesszük a határátmenetét ( 0X∆ → ), akkor megkapjuk a mozgásmennyiség 1D egyenletét: ( )0 0 0 0 0, X
A P A b A u+ρ =ρ ɺɺ . (1.40)
Amikor a 0 uρ ɺɺ tehetetlenségi tag zérus vagy (a másik két tag mellett)
elhanyagolhatóan kicsiny, akkor az ( )0 0 0,
0X
A P A b+ρ = (1.41)
egyensúlyi egyenlethez jutunk. Megjegyezzük, hogy ha a mozgásmennyiséget leíró egyenletbe behelyettesítjük az anyagmodell egyenletét, akkor az ( , )u X t függvényre egy nemlineáris parciális differenciálegyenletet kapunk:
( )0 , , 0 0 0 0,( , ,...)X X X
A P u u A b A u+ρ = ρɺ ɺɺ . (1.42)
- Perem-, kezdeti és folytonossági feltételek
Az elmozdulási és feszültségi peremfeltételt a két peremen az alábbi módon írhatjuk fel:
0 0( , ) ( , ), illetve ,u x tu X t u X t X n P t X= ∈Γ = ∈Γ . (1.43)
Megjegyezzük, hogy egy perempontban vagy az elmozdulást vagy az erőt lehet előírni (ugyanabban a pontban mindkettőt nem lehet előírni). A kezdeti feltételt kétféleképpen adhatjuk meg: a./ Megadjuk a kezdeti (t = 0) elmozdulás- és sebességfüggvényt: 0 0( ) ( ),u X és v X X∈Ω ,
Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 19
ahol az 0u függvény kielégíti az elmozdulási peremfeltételt. Másik változat:
b./ Megadjuk a kezdeti sebesség- és feszültségfüggvényt : 0 0( ) ( ),v X és P X X∈Ω ,
ahol 0P függvény kielégíti a feszültségi peremfeltételt.
A folytonossági feltételt a mozgásmennyiség egyenlete miatt kell használnunk. Eszerint: ( )0 0, ,a bA P X X X= ∈ .
Itt a ( )f X változó jelentése a következő: ( )0
( ) lim ( ) ( )f X f X f Xε→
= +ε − −ε .
Az előző négy pontban felsorolt egyenletek és az ötödik pontban hozzájuk illesztett feltételek együtt alkotják a vizsgált feladat (térben peremérték, időben kezdeti érték típusú) erős alakját. Numerikus – végeselemes – számításaink céljára ezt az úgynevezett gyenge alakba transzformáljuk a következő módon: A mozgásmennyiség előzőekben felírt
( )0 0 0 0 0, XA P A b A u+ρ =ρ ɺɺ (1.44)
egyenletét megszorozzuk a ( , )u X tδ tesztfüggvénnyel. A tesztfüggvényt az ( , )u X t próbafüggvény variálásával állíthatjuk elő (a próbafüggvénytől megköveteljük, hogy elégítse ki az elmozdulási peremfeltételeket valamint legyen elegendően sima a mozgásmennyiségi egyenletben szereplő deriváltak előállításának biztosítására). A próbafüggvény tulajdonságai miatt a tesztfüggvénynek zérusnak kell lennie az elmozdulási peremfeltételek tartományán. Az előző egyenlet jobb oldalát vigyük át bal oldalra. A bal oldalon lévő függvény akkor zérus, ha minden tesztfüggvényre merőleges, vagyis a bal oldal és a tesztfüggvény szorzatának a tartományon vett integrálja zérus:
0 , 0 0 0 0( ) 0b
a
X
X
X
u A P A b A u dX δ +ρ −ρ = ∫ ɺɺ . (1.45)
Megjegyezzük, hogy a feszültségben a próbafüggvény változóként szerepel. Az integrál első tagja (a parciális integrálás összefüggését alkalmazva) átalakítható a következő módon:
( ) ( )0 0 , 0, ,
b b
a a
X X
XX XX X
u A P dX uA P u A P dX δ = δ −δ ∫ ∫ . (1.46)
Alkalmazzuk erre a kifejezésre az integrálszámítás alaptételét (ez a tétel például 0C
folytonos függvények esetén: , ( ) ( ) ( )b
x
a
f x dx f b f a= −∫ , 1C− folytonosság esetén
pedig , ( ) ( ) ( ) ( )b
x iia
f x dx f b f a f x= − +∑∫ , ahol az ix pontok a szingularitási
helyeket jelölik, stb.):
( ) ( ) ( )00 0 , 0,
b b
a a
X X
XXX X
u A P dX uA n P u A P dXΓ
δ = δ − δ =∫ ∫ (1.47)

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 20
( )00 , 0( )
b
ta
X
x X
X
uA t u A P dXΓ
= δ − δ∫ .
A második sorban szereplő összefüggések felírásánál figyelembe vettük, hogy a uδ tesztfüggvény eltűnik az elmozdulási peremfeltételek tartományán, továbbá felhasználtuk a feszültségi peremfeltételt. Visszahelyettesítve mindezeket az első integrálba (az egyenletet megszoroztuk -1-gyel) megkapjuk az 1D nemlineáris feladat gyenge alakját:
( ) ( )0, 0 0 0 0 0 0 0
b
ta
X
X x
X
u A P u A b A u dX uA tΓ
δ −δ ρ −ρ − δ = ∫ ɺɺ . (1.48)
Az integrálban szereplő első tag a belső munka, a harmadik tag a kinetikus munka, a második és negyedik tag (együtt) a külső munka ellentettjének a variációját adja meg, így végül az egész nemlineáris feladat a gyenge alaknál a virtuális munkák tételét eredményezte: 0b k kinW W W Wδ δ δ δ= − + = . (1.49)
Ennek a tételnek a segítségével fogjuk felépíteni az 1D nemlineáris feladat végeselemes modelljét. A./ Módosított Lagrange-leírási mód
Ennél a változatnál az egyenleteket a pillanatnyi konfiguráció segítségével írjuk fel, feszültségváltozónak a Cauchy-, alakváltozás paraméternek pedig az alakváltozás-sebesség tenzort használjuk (emlékeztetünk a Mechanika MSc-ben leírtakra: a nemlineáris feladatok vizsgálatánál nem lehet szabadon megválasztani az energiaértelemben egymáshoz kapcsolt alakváltozás- és feszültségtenzor párokat).
( , )
( , )( )
T x tx t
A xσ = , x
vD
x
∂=∂
. (1.50)
Ugyancsak emlékeztetőül megjegyezzük, hogy 1D esetben az alakváltozás-sebesség tenzor idő szerinti integrálja a logaritmikus nyúlást adja (ez többdimenziós alakváltozási állapotban nem teljesül):
0
( , ) ln ( , )t
xD X t dt F X t=∫ . (1.51)
A módosított Lagrange-leírási módhoz tartozó alapegyenleteket most már részletesebb kommentárok nélkül adjuk meg: - Anyagmegmaradás egyenlete
0 0 0vagyJ FA Aρ ρ ρ ρ= = . (1.52)
- Energiamegmaradás egyenlete
,b x x xW D q s= − +ɺρ σ ρ . (1.53)
- Anyagegyenletek
0
( , ) ( ,..., ( , ) , ( , ),...),t
Dx xX t S D D X t dt X t t tσσ σ= ≤∫ , (1.54/a)
vagy pedig , ( , ) ( ( , ), ( , ),...), .D
t t xX t S D X t X t t tσσ σ= ≤ (1.54/b)

Bojtár-Gáspár: Nemlineáris végeselemek Első előadás Előadásvázlat
2010.02.11. 21
- Mozgásmennyiség megmaradása ( ),xA Ab Avσ ρ ρ+ = ɺ . (1.55)
- Perem-, folytonossági- és kezdeti feltételek
00( , ) ( , ) , ( , ) ( , ) ,v x t x xv X t v X t X n X t t X t X t A t A= ∈Γ σ = ∈Γ = , (1.56)
és 0t v t vΓ ∪Γ =Γ Γ ∩Γ = .
0.Aσ =
( ) 0 0,0 ( ), ( ,0) ( )X X v X v Xσ =σ = .
A gyenge alakot most is egy tesztfüggvény segítségével állítjuk elő, de most nem az elmozdulásokat, hanem a sebességeket variáljuk, és ezzel szorozzuk be a mozgásmennyiség megmaradását leíró egyenletet:
( ),b
a
x
xx
Dvv A Ab A dx
Dt
δ σ +ρ −ρ
∫ . (1.57)
Az átalakítás az előző pontban leírtakhoz hasonló lépésekkel történik:
( ) ( ) ( ),, ,
b b
ta a
x x
xx xx x
v A dx vA v A dx vAnΓ
δ σ = δ σ −δ σ = δ σ − ∫ ∫ (1.58)
,
b
ia
x
xi x
v A v A dxΓ
− δ σ − δ σ∑ ∫ .
Az egyenletben szereplő iΓ helyek a szingularitási pontokat jelzik. A peremfeltételek
figyelembevételével az integrál a következő alakú lesz:
( ), 0b
ta
x
x x
x
Dvv A v Ab A dx vAt
Dt Γ
δ σ−δ ρ −ρ − δ = ∫ . (1.59)
A módosított Lagrange-módszer ezen gyenge alakja a virtuális teljesítmények elvének felel meg. Az integrál első tagja a virtuális belső, második és negyedik tagja a virtuális külső, harmadik tagja pedig a virtuális kinetikus teljesítménnyel azonos. Így ebben a formában a gyenge alak: 0belső külső kinetikusP P P Pδ = δ −δ +δ = . (1.60)
Alapvető matematikai különbség az előző és ezen gyenge alak között az eltérő tartomány: a teljes Lagrange-változatnál az eredeti, itt pedig a pillanatnyi konfigurációt használtuk.
Felhasznált irodalom: 1./ Reddy, J. N. : An introduction to nonlinear finite element analysis, Oxford University Press, 2004. 2./ Belytschko, T. – Liu, W. K. – Moran, B. : Nonlinear finite elements for continua and structures, John Wiley, 2000. 3./ Wriggers, P. : Nonlinear Finite Element Methods, Springer, 2008. 4./ Bojtár I. : Mechanika MSc, BME, 2009.