vibration analysis lectures
TRANSCRIPT

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 1/283
Indian Institute of Technology Kanpur
Lecture 2
Basic Vibratory Phenomena
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 2/283
Indian Institute of Technology Kanpur
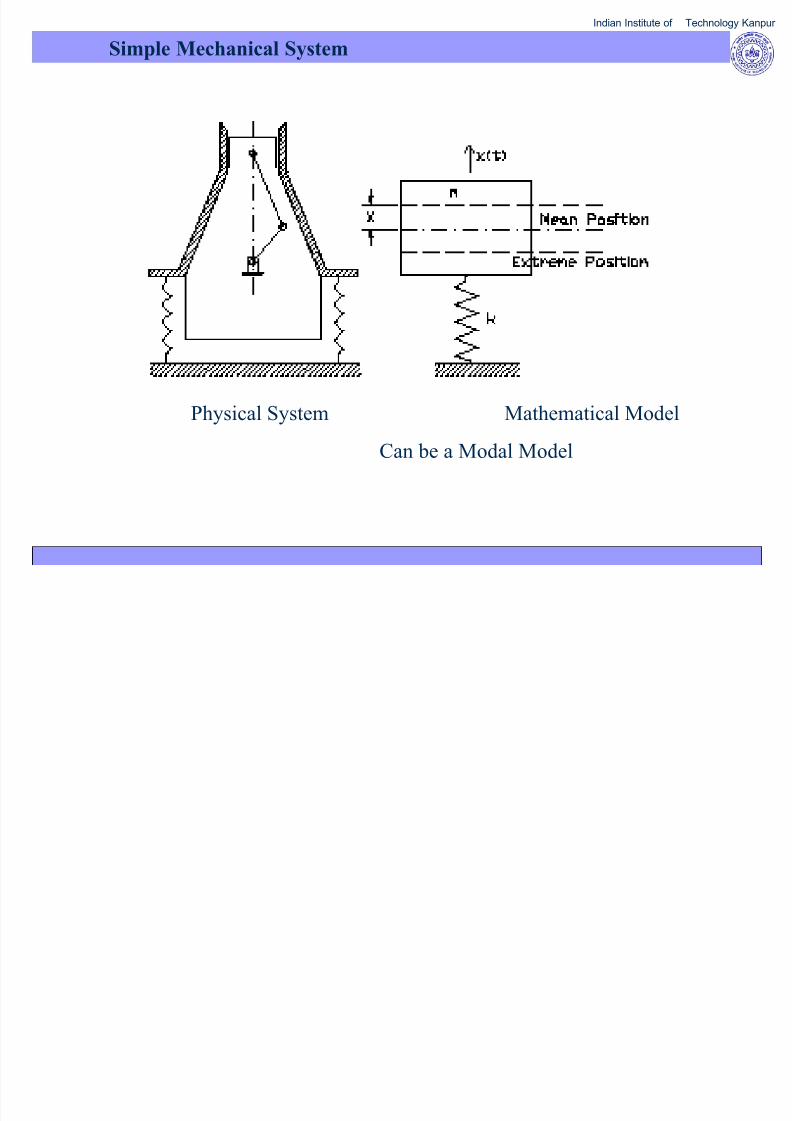
Simple Mechanical System
Physical System Mathematical Model
Can be a Modal Model
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 3/283
Indian Institute of Technology Kanpur
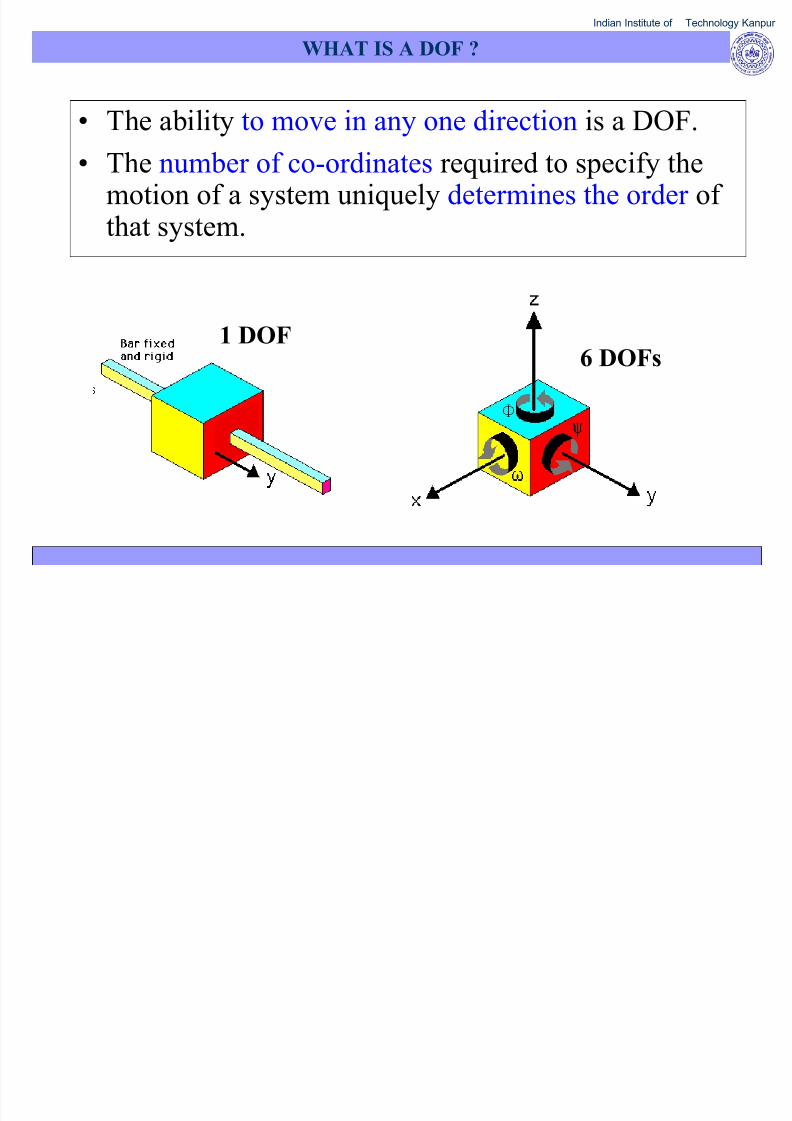
WHAT IS A DOF ?
• The ability to move in any one direction is a DOF.
• The number of co-ordinates required to specify the
motion of a system uniquely determines the order of that system.
6 DOFs1 DOF

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 4/283
Indian Institute of Technology Kanpur
NATURAL FREQUENCY AND TIME RESPONSE
frequency. natural theis where
)sin(sincos :Solution
0 :motion of Equation
m
k
t C t Bt Ax(t)
kxxm
n
nnn
=
+=+=
=+
ω
φ ω ω ω
&&
xm &&
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 5/283
Indian Institute of Technology Kanpur
2
max
2
max
0
0
00
sin
cos
)sinsincos
:case general In the
tstcos
:shown that becanit algebra, someAfter
0 and0thatassume uslet instance,For
.conditionsinitialon the depend),(or ),( constants The
nnn
nnn
nnn
nn
n
C ωx)t ( ωC ω(t)x
C ωx )t ( ωC ω(t)xt ( ωC t Bt Ax(t)
in
x
xx(t)
x)( x x)x(
C BA
=→+−=
=→+=+=+=
+=
==
&&&&
&&
&
&&
φ
φ
φ ω ω
ω ω ω
φ
DISPLACEMENT, VELOCITY & ACCELERATION - I
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 6/283
Indian Institute of Technology Kanpur
)sin
)cos
)sin
2
φ
φ
φ
+−=
+=
+=
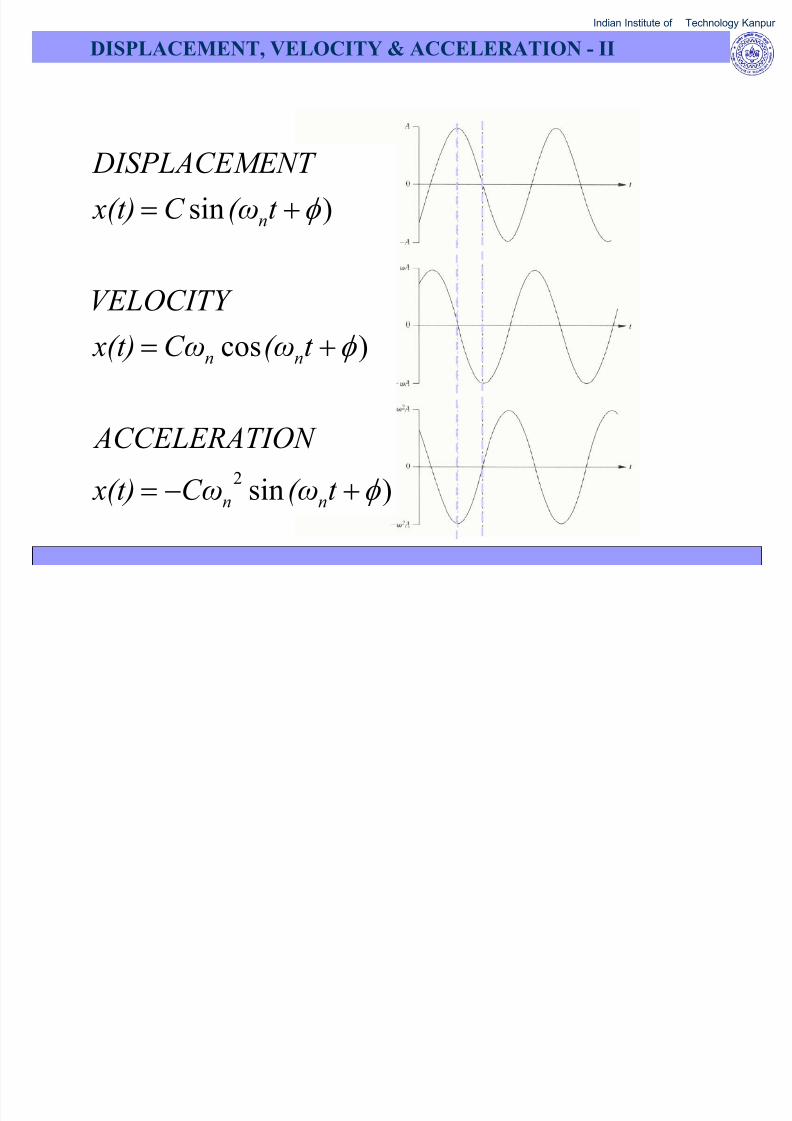
t ( ωC ω(t)x
ON ACCELERATI
t ( ωC ω(t)x
VELOCITY
t ( ωC x(t)
NT DISPLACEME
nn
nn
n
&&
&
DISPLACEMENT, VELOCITY & ACCELERATION - II
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 7/283
Indian Institute of Technology Kanpur
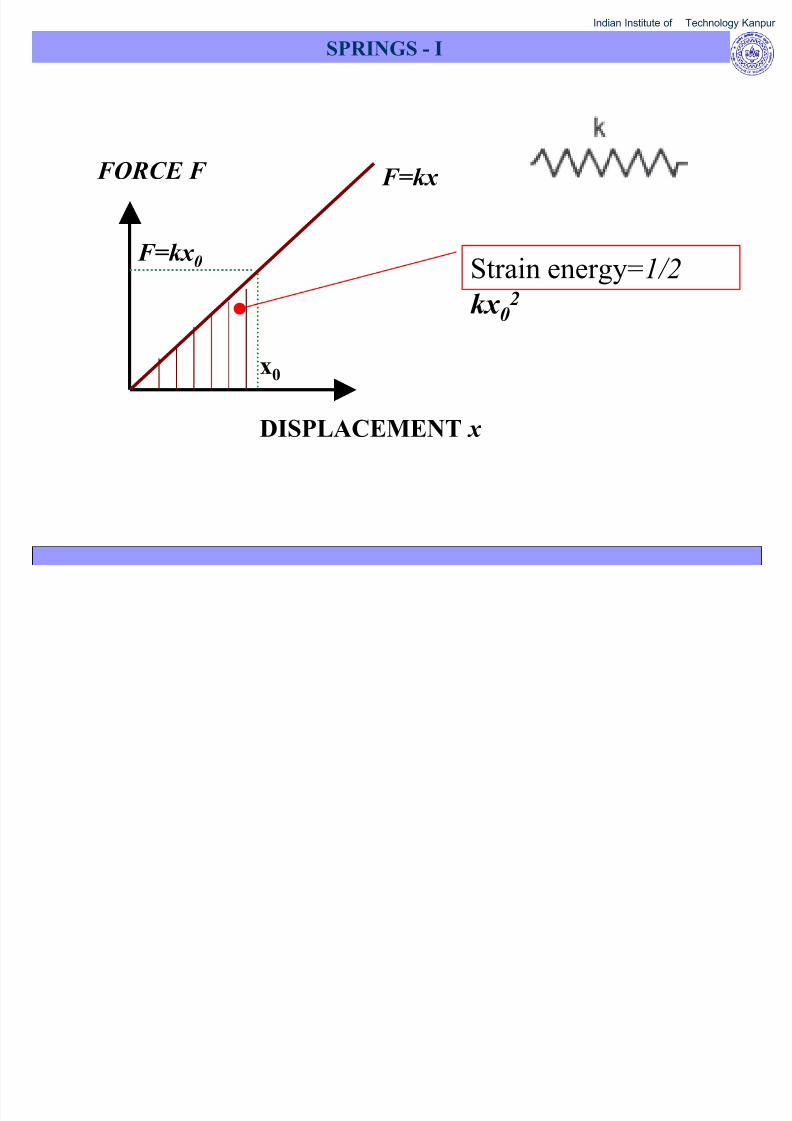
SPRINGS - I
DISPLACEMENT x
FORCE F F=kx
F=kx 0
x0
Strain energy=1/2
kx 02

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 8/283
Indian Institute of Technology Kanpur
• What provides the spring (or restoring )
force?
• A spring
• A float mechanism
• Beam flexibility
SPRINGS - II
• Gravity

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 9/283
Indian Institute of Technology Kanpur
STIFFNESS FORMULAE

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 10/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 11/283
Indian Institute of Technology Kanpur
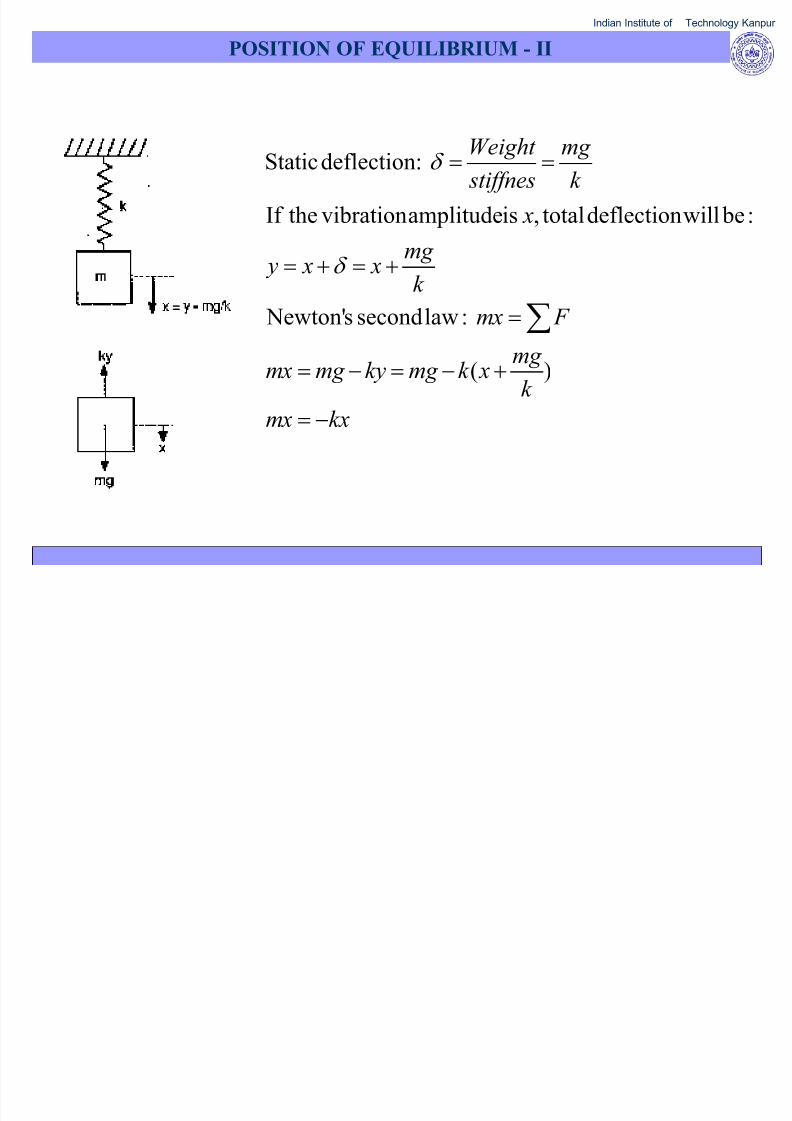
POSITION OF EQUILIBRIUM - II
kxxmk
mg xk mg kymg xm
F xm
k
mg xxy
x
k
mg
stiffnes
Weight
−=
+−=−=
=
+=+=
==
∑
&&
&&
&&
)(
:law second sNewton'
:be willdeflection total, is amplitude vibrationtheIf
:deflection Static
δ
δ

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 12/283
Indian Institute of Technology Kanpur
TRANSLATIONAL, TORSIONAL & ROTATIONAL SDOF SYSTEMS
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 13/283
Indian Institute of Technology Kanpur
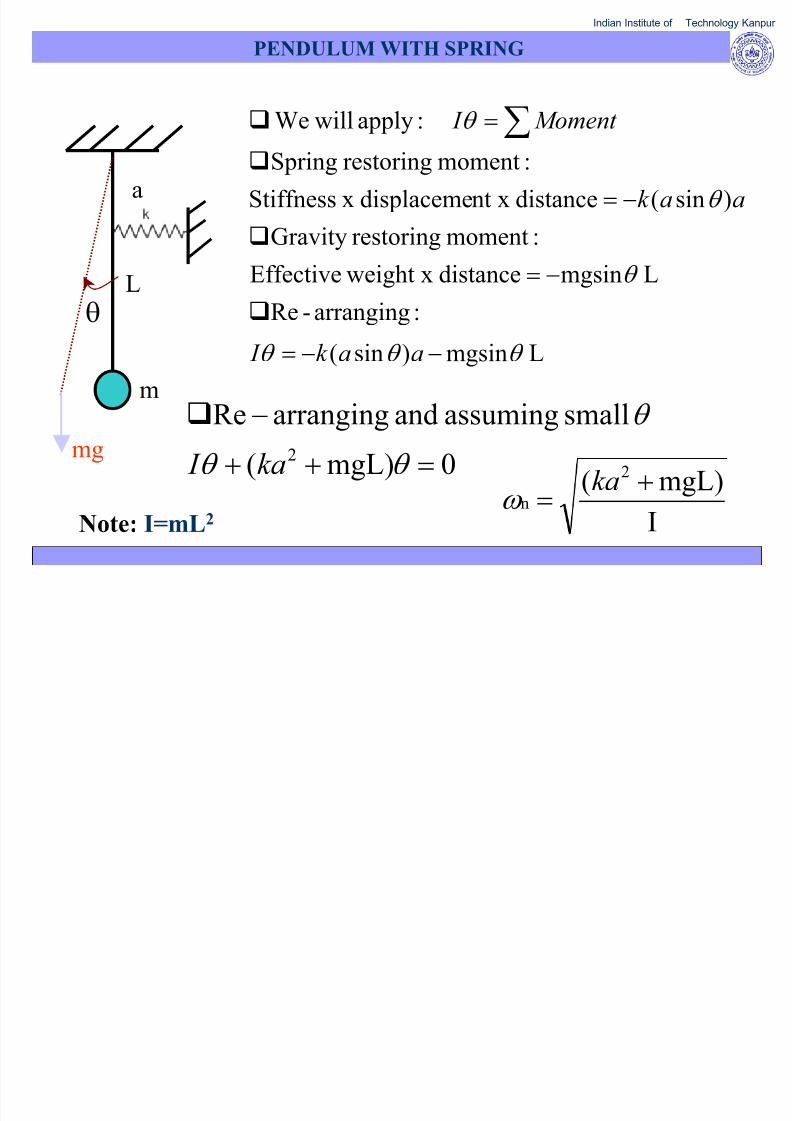
PENDULUM WITH SPRING
0mgL)(
small assuming and arrangingRe
2 =++
−
θ θ
θ
kaI &&
L mgsin)sin(
: arranging-Re
L mgsindistanceweight xEffective
:moment restoringGravity)sin(distancent xdisplacemexStiffness
:moment restoring Spring
:apply willWe
θ θ θ
θ
θ
θ
−−=
−=
−=
=∑
aak I
aak
Moment I
&&
&&
I
mgL)( 2
n
+=
kaω
Note: I=mL2
L
m
a
θ
mg

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 14/283
Indian Institute of Technology Kanpur
TORSIONAL SYSTEM
srad I
k
rad NmLGJ k
r
J L
G
J
T
T Ang dispTorquek
T n
T
T
/ 4.4016.0
261
/261/ :Combining
2 where Also
stiffness Torsional
4
===
====
===
ω
π θ
θ
G= 80 GPa
D=10 mm
L= 300 mm
k T θ
0=+ θ θ T k I &&
I=0.16 kgm2
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 15/283
Indian Institute of Technology Kanpur
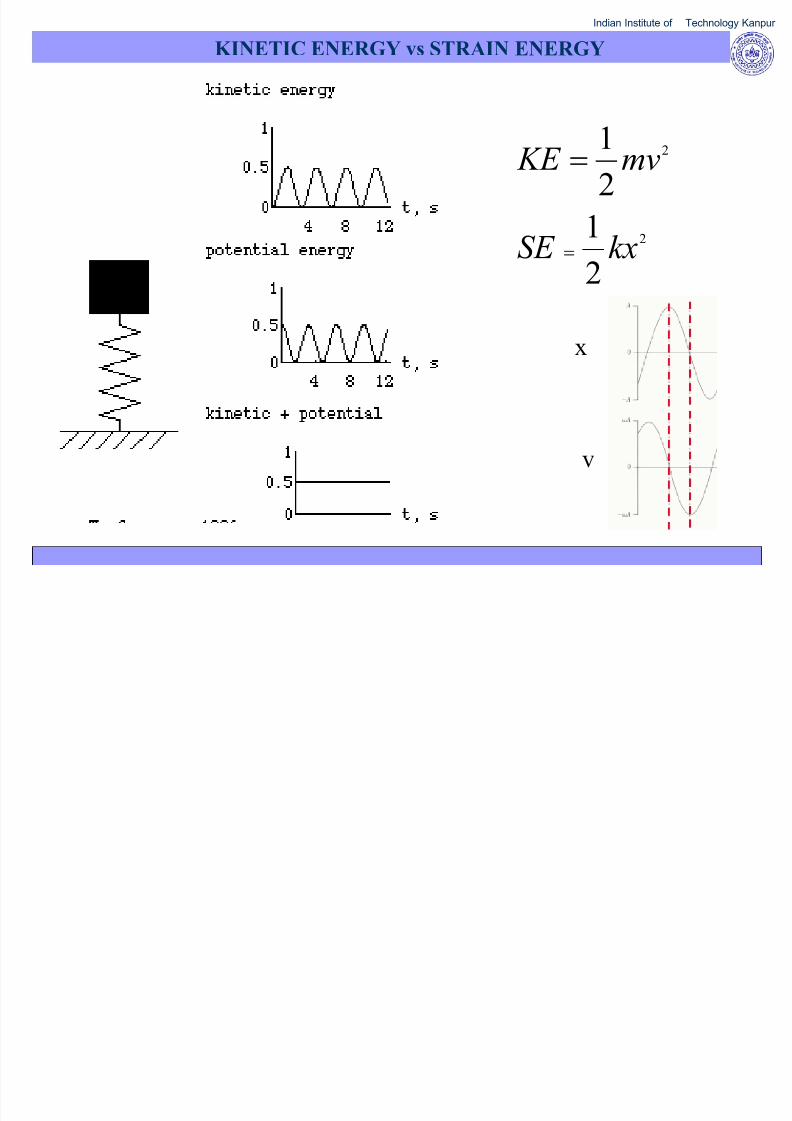
KINETIC ENERGY vs STRAIN ENERGY
2
2
2
12
1
kxSE
mvKE
=
=
x
v

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 16/283
Indian Institute of Technology Kanpur
ENERGY METHOD TO DETERMINE ωn
MAX KINETIC ENERGY = MAX STRAIN ENERGY
Max displacement,
zero velocity
Max velocity,
zero displacement
nnn
n
ωxMaxt xt x
xMaxt xt x
00
00
cos)( :Velocity
sin)( :ntDisplaceme
==
==
ω ω
ω
&
m
k kxωxm nn == ω 2
0)0 :Hence2
1(
2
1 2
FOR THE SDOF MASS-SPRING SYSTEM
0 0 AND xxωxx MAX nMAX →→&
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 17/283
Indian Institute of Technology Kanpur
MORE COMPLEX SYSTEMS
i
iiii
QxD
xV
xT
xT
dt d =∂∂+∂∂+∂∂−
∂∂ &&
GENERAL LAGRANGE EQUATION
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 18/283
Indian Institute of Technology Kanpur
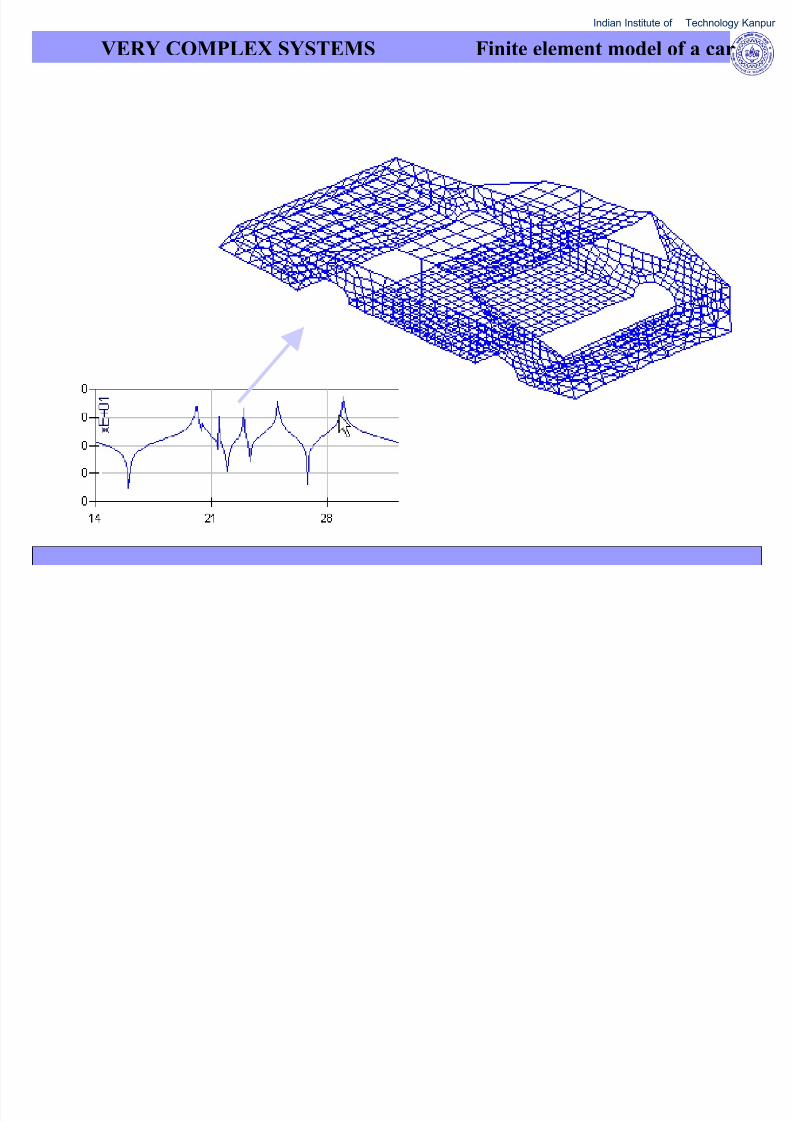
VERY COMPLEX SYSTEMS Finite element model of a car
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 19/283
Indian Institute of Technology Kanpur
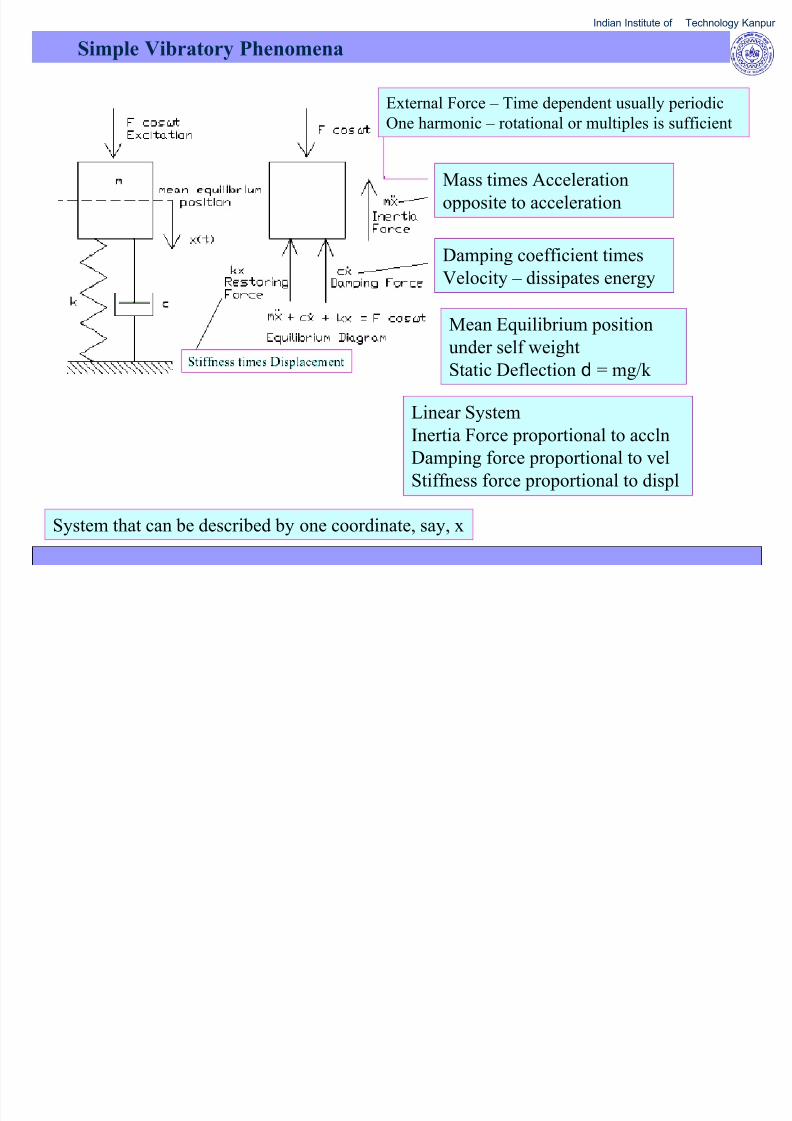
Simple Vibratory Phenomena
External Force – Time dependent usually periodicOne harmonic – rotational or multiples is sufficient
Mass times Acceleration
opposite to acceleration
Damping coefficient times
Velocity – dissipates energy
Mean Equilibrium position
under self weight
Static Deflection d = mg/k
Linear System
Inertia Force proportional to accln
Damping force proportional to vel
Stiffness force proportional to displ
System that can be described by one coordinate, say, x

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 20/283
Indian Institute of Technology Kanpur
Torsional Vibration
Angular vibrations of any drive train
• A serious problem in reciprocating machines limiting
the speeds, multi cylinder engines are better to even out
the highly pulsating torque
• Usually not a problem in rotating machinery as the drive
torque is fairly uniform
• Torsional vibrations can be very severe under suddenly
applied loads, e.g., rolling mills, electrical short circuitconditions … Under these conditions, couplings, gear
boxes … are susceptible for failures
• Choose proper coupling to make it work well under
normal conditions and act as a fuse under severe loads
and protect the machinery
• Torsional (Angular) stiffness Nm/rad
• Mass moment of inertia Kg-m2
rad/s
02
2
I
k p
k dt
d I
=
=+ θ θ
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 21/283
Indian Institute of Technology Kanpur
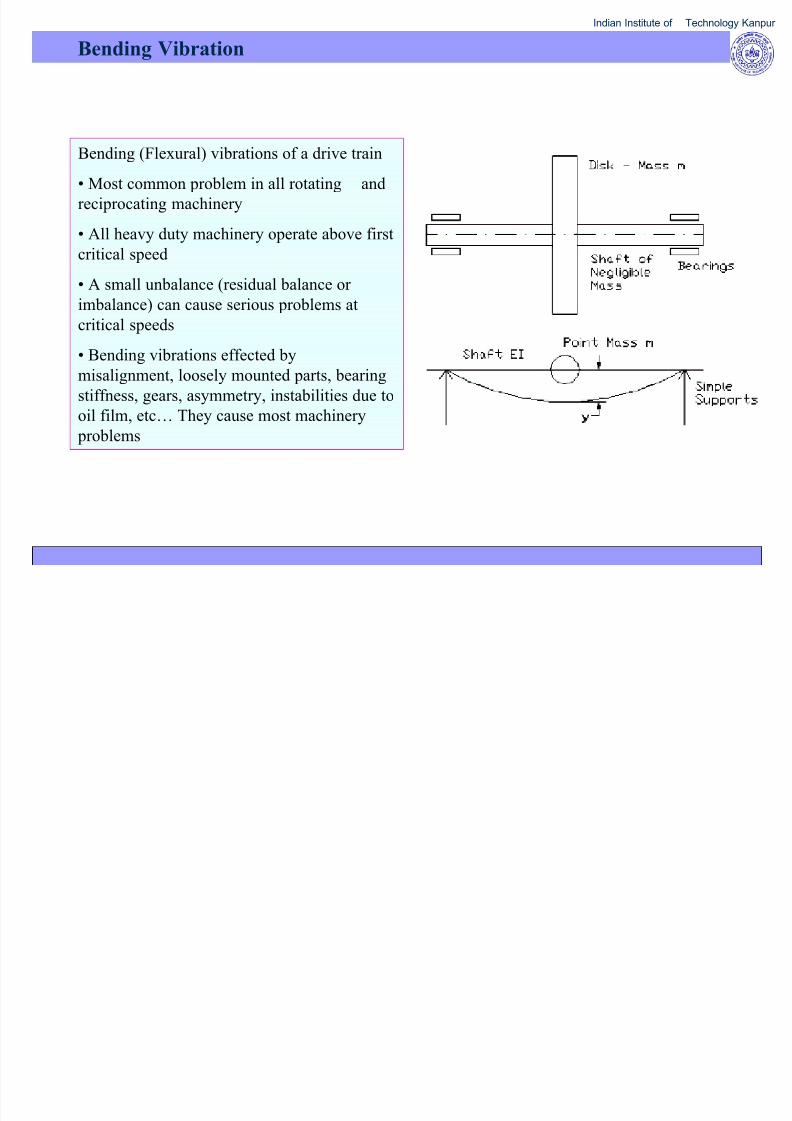
Bending Vibration
Bending (Flexural) vibrations of a drive train
• Most common problem in all rotating and
reciprocating machinery
• All heavy duty machinery operate above first
critical speed
• A small unbalance (residual balance or
imbalance) can cause serious problems atcritical speeds
• Bending vibrations effected by
misalignment, loosely mounted parts, bearing
stiffness, gears, asymmetry, instabilities due tooil film, etc… They cause most machinery
problems

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 22/283
Indian Institute of Technology Kanpur
FREE MOTION OF A DAMPED SDOF SYSTEM
.ratio damping critical viscoustheis2
frequency, natural undamped theis where
02 :by Dividing
0 :motion of Equation
0
2
kmc
cc
mk
xxxm
kxxcxm
n
nn
==
=
=++=++
ζ
ω
ω ζω &&&
&&&

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 23/283
Indian Institute of Technology Kanpur
SOLUTION OF THE EQUATION OF MOTION
)( :form theof isSolution
02 :EOM
21
2
t Be
t Aet x
xxx nn
α α
ω ζω
+=
=++ &&&
n
nnt Ae
αt Aex(t)
ω ζ ζ α
ω α ζω α α
α α
)1(
0)2(
EOM. into insert , & find To
2
2 ,1
22
2 1
−±−=→
=++
=
A & B are two constants depending on initial
conditions.
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 24/283
Indian Institute of Technology Kanpur
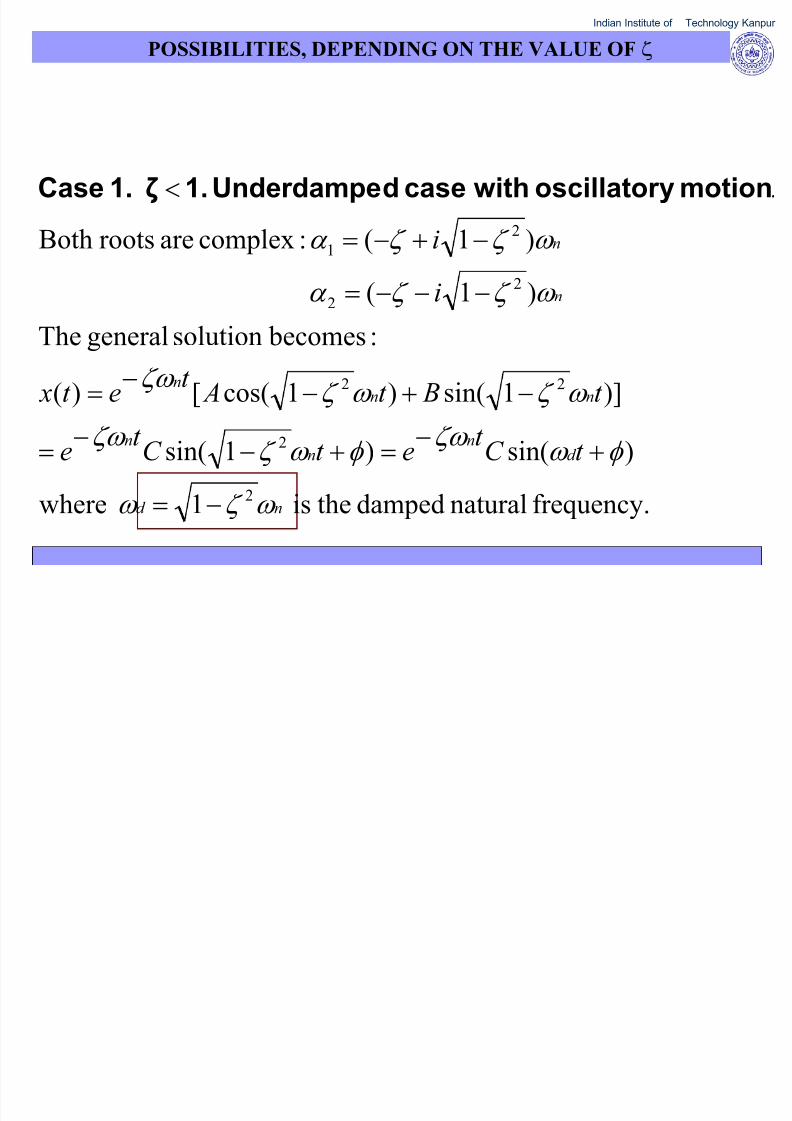
frequency. natural damped theis1 where
)sin()1sin(
)]1sin()1cos([)(
:becomessolution general The)1(
)1(:complex are rootsBoth
2
2
22
2
2
2
1
nd
d n
nn
nn
n
n
n
t C t
et C t
e
t Bt A
t
et x
i
i
ω ζ ω
φ ω ζω
φ ω ζ ζω
ω ζ ω ζ
ζω
ω ζ ζ α
ω ζ ζ α
−=
+−=+−−=−+−
−=
−−−=
−+−=< motion yoscillator withcase dUnderdampe 1.ζ 1. Case
POSSIBILITIES, DEPENDING ON THE VALUE OF ζ

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 25/283
Indian Institute of Technology Kanpur
TIME HISTORY FOR OSCILLATORY MOTION
Exponential term
t e nζω −
)sin( φ ω +t C d
Oscillatory term
t

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 26/283
Indian Institute of Technology Kanpur
CASE 2
t Be
t Aet x
n
n
n
n
ω ζ ζ
ω ζ ζ
ω ζ ζ α
ω ζ ζ α
)1(
)1()(
:becomessolution The
)1(
)1(:real are rootsBoth
.
2
2
22
2
1
−−−+
−+−=
−−−=
−+−=
> motion yoscillator no withcase Overdamped 1.ζ

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 27/283
Indian Institute of Technology Kanpur
EFFECT OF OVERDAMPING

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 28/283
Indian Institute of Technology Kanpur
CASE 3
t eBt At x n
n
ω
ω α α
−+=
−==→
=
)()(
:becomessolution The
:root Double 21
decay of rate Max
motion damped-Critically 1.ζ

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 29/283
Indian Institute of Technology Kanpur
0)4(
0)5.2( ,0)1(0)0(
:conditions Initial
=
===
x
xxx&
EXAMPLE: SYSTEM IDENTIFICATION FROM TIME RESPONSE
t
4000 kg
Find k and c.
1.0 s 2.5 s 4.0s
x(t)
T=2π/ωd=3
s
ωd= 2π/3
I di I tit t f T h l K

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 30/283
Indian Institute of Technology Kanpur
LOGARITHMIC DECREMENT - I
n
n
d
nn
mmn
AMP
md mn
md mn
eeT
e
t t e
t C t
e
t C t e
ω ζ
π ζω
ω π ζω ζω
ζω
φ ω ζω
φ ω ζω
21
2
2
)()x(t
)x(t
)sin(
)sin(
)x(t
)x(t
:cycles successive obetween tw ratio amplitude The
1
1m
m
111m
m
−===
−−=
+−+−
=
+
+
+++
I di I tit t f T h l K

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 31/283
Indian Institute of Technology Kanpur
LOGARITHMIC DECREMENT - II
)x(t
)x(tln
1
:cycles 1)-(Nby separated are amplitudes twotheIf
221
2
)x(t
)x(tln
:sidesboth of logarithms Taking
2
1
2
)x(t)x(t
Nm
m
1m
m
1m
m
+
+
+
=
≈−
==
−=
N
e
δ
πζ
ζ
πζ δ
ζ
π ζ
I di I tit t f T h l K

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 32/283
Indian Institute of Technology Kanpur
Viscous Damping Principle
• Damping force is proportional to velocity and
= Damping Coefficient C times Velocity dx/dt
– dissipates energy• Dashpots can de designed as in shock
absorbers or the equivalent effect of energy
dissipating capacity determined from tests to
find the value of this coefficient c
s/m-N
)(
δ
µ π
δ µ π
µ τ
Dt c
xcv
Dt F
dz
dv
=
==
=
&
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 33/283
Indian Institute of Technology Kanpur
DAMPING IS NOT ALWAYS VISCOUS !
• Viscous damping ratio: ζ = c/c0
0 =++ kxxcxm &&&
0 )1( =++ xik xm η &&
•Aerodynamic damping: δ (e. g. gas pressure on a blade)
• Friction damping (energy dissipation via contact mechanism)
π δ η ζ 2/2/ ==
• Material damping (what the material can dissipate in onecycle)
AT RESONANCE
Dashpot
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 34/283
Indian Institute of Technology Kanpur
EXAMPLE OF DAMPED MOTION - PARACHUTE
Find the maximum compression in thespring if m=20 kg, k=10kN/m, c=540Ns/m
and v=8 m/s.
Compression = static compression + dynamic compression
mx
x
k
mg
stiffness
weight d 0196.0
100010
81.9201 ====
2d
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 35/283
Indian Institute of Technology Kanpur
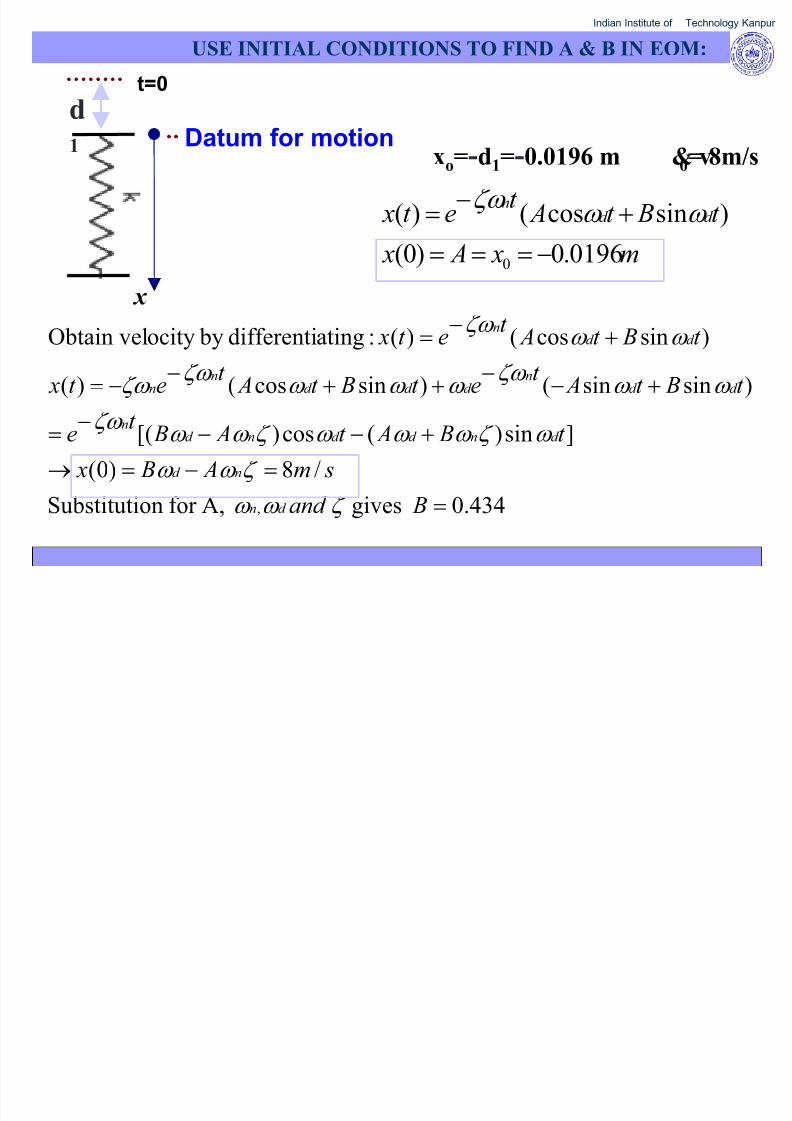
USE INITIAL CONDITIONS TO FIND A & B IN EOM:
x
xo=-d1=-0.0196 m & v0= 8m/s
434.0 gives A,for onSubstituti
/8)0(
]sin)(cos)[(
)sinsin()sincos()(
)sincos()( :atingdifferentibyocityObtain vel
, =
=−=→
+−−−=
+−−++−−=
+−=
Band
smABx
t BAt ABt
e
t Bt At
et Bt At
et x
t Bt At
et x
d n
nd
d nd d nd n
d d n
d d d n
n
d d n
ζ ω ω
ζ ω ω
ω ζ ω ω ω ζ ω ω ζω
ω ω ζω
ω ω ω ζω
ζω
ω ω ζω
&
&
mxAx
t Bt At et x d d n
0196.0)0(
)sincos()(
0 −===+−= ω ω ζω
d1 Datum for motion
t=0
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 36/283
Indian Institute of Technology Kanpur
i
iiiiQx
D
x
V
x
T
x
T
dt
d
=∂∂
+∂∂
+∂∂
−
∂∂
&&
0D :damping No
0Q :vibration-Free
systems)SDOFfor 1(inumber ordinate-Co :i
force External :Q
functionndissipatio Damping :D
energy spring & Potential :energy Kinetic :
=
=
=
V T
0
x is some general arbitrary co-ordinate.
0=∂∂
+
∂∂
x
V
x
T
dt
d
&
SDOF
LAGRANGE’S EQUATION OF MOTION
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 37/283
Indian Institute of Technology Kanpur
EXAMPLE 1 – SDOF SYSTEM
FIND THE EQUATION OF MOTION
00
2
1
)(2
1
2
2
=+→=∂
∂+
∂
∂=∂
∂
→=
==
∂∂
→=∂∂
→=
kxxmx
V
x
T
dt
d
kxx
V
kxV
xmxmdt
d
x
T
dt
d xmx
T xmT
&&
&
&&&
&
&
&
&
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 38/283
Indian Institute of Technology Kanpur
EX 2 - PENDULUM WITH SPRING
energy potential:PE energy, Spring:
Change: where
0
2
1 2
SE
PE SE V
D
I T
∆∆+∆=
=
= θ &
)cos1()(2
1
)cos1(
y where
2
1SE
2
2
θ θ
θ
θ
−+=
−=
==
mgLak V
mgLPE
aky
L
m
a
θ
mg
L
mgLcosθ
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 39/283
Indian Institute of Technology Kanpur
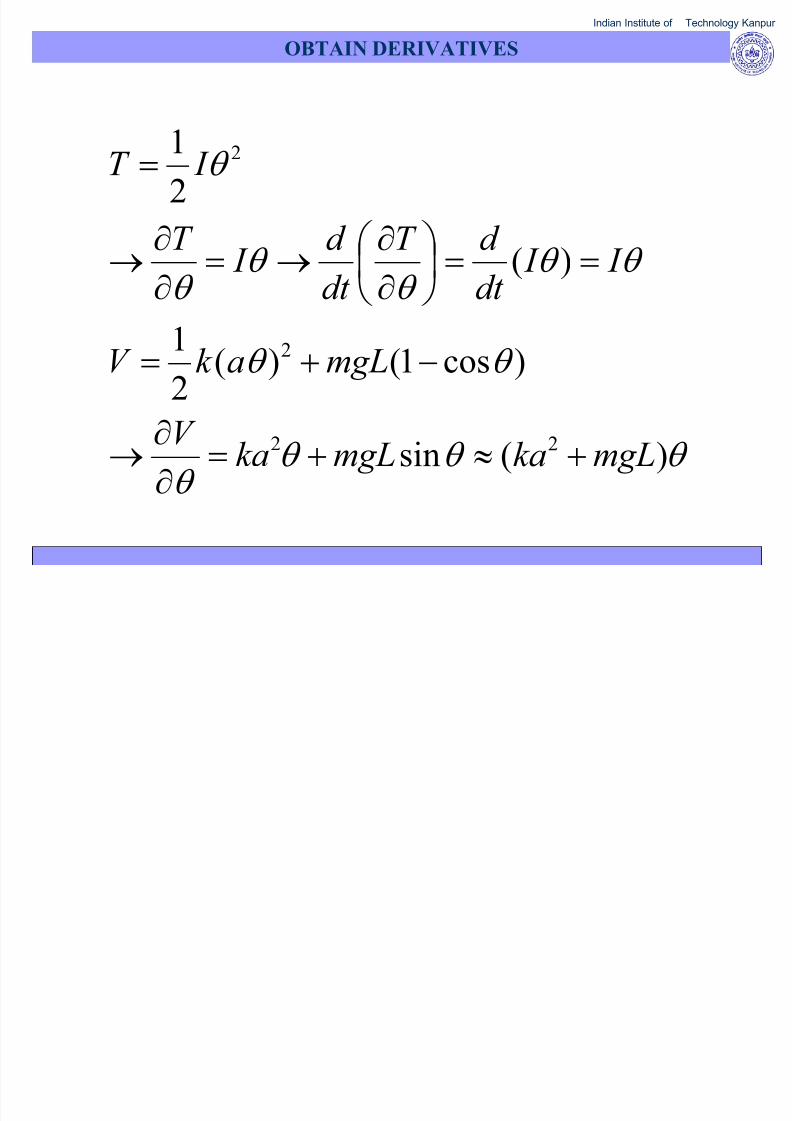
OBTAIN DERIVATIVES
θ θ θ θ
θ θ
θ θ
θ
θ
θ
θ
)(sin
)cos1()(
2
1
)(
2
1
22
2
2
mgLkamgLkaV
mgLak V
I I
dt
d T
dt
d I
T
I T
+≈+=∂∂
→
−+=
==
∂
∂→=
∂
∂→
=
&&&
&
&
&
&
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 40/283
Indian Institute of Technology Kanpur
INSERT INTO LAGRANGE EQUATION
0)(
0
2 =++
=∂
∂
+
∂
∂
θ θ
θ θ
mgLkaI
V T
dt
d
ii
&&
&
I
mgL)(kaωn
+=
2
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 41/283
gy p
FORCED VIBRATION
PI CF +=x(t):Solution
Steady-state
x(t)=xCF(t)+ xPI(t)
xCF(t)Transient
xPI(t)
Periodic solution
RHS)withODEorder -(2nd
)( :EOM t F kxxcxm =++ &&&
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 42/283
gy p
PI. a guess toneed now We
sin)(
:only excitation of typeoneconsider willWe
F(t). RHS, theknowmust wePI, obtain the To
)sincos()(
:bygivenisCF the
0 t F t F kxxcxm
t Bt At
et x d d n
ω
ω ω ζω
==++
+−=
<
&&&
,1ζ onlyconsider we If
)( OF SOLUTION t F kxxcxm =++ &&&
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 43/283
gy p
PROPERTIES OF THE PI
When a linear system is subjected to a harmonic
excitation of the formFsinωt
,• It will respond harmonically at the same frequency.
• There will be a phase lag between the force and the
response.
)sin()( :0 sin)( :
0
0
φ ω ω ω
−=∞<<=
t xt xOutput t F t F Input
PI
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 44/283
PHASE LAG
t F t F ω sin)( 0=
)sin()( 0 φ ω −= t xt x
-100
-50
0
50
100
0 0.1 0.2 0.3-100
-50
0
50
100φ
Tim
e
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 45/283
SOLUTION FOR THE STEADY-STATE VIBRATION
22220
0
2222
00
00
1
2tan& )2()1(
1
2 and Let
tan&
)()(
sin EOM theinto )sin()( PI the
insertingby found becan vibrationstatesteady for thesolution The
r
r
r r k F
x
km
cr
mk
c
cmk
F x
t F kxxcxmt xt x
n
PI
−=
+−=
==
−=
+−
=
=++−=
−
ζ φ ζ
ζ ω
ω
ω
ω φ
ω ω
ω φ ω &&&
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 46/283
FREQUENCY RESPONSE FUNCTION (FRF)
)&properties (systemFunction)&c m, (k,FunctionInput
Output
:form theof isIt
)()(1
)2()1(1
:expression heConsider t
2222220
0
ω ω
ω ω ζ
==
+−=+−==cmk r r k F
xH
Such a function is called Transfer Function in general
It is called Frequency Response Function (FRF) in
vibration analysis.
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 47/283
FRF PLOT
I
RESONANCE
φ=900 at resonance
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 48/283
EFFECTS OF DAMPING
Reduces
response at
resonance.
Has little effectelsewhere.
Has relatively
little effect on
resonantfrequency.
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 49/283
Another look at RESONANCE
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 50/283
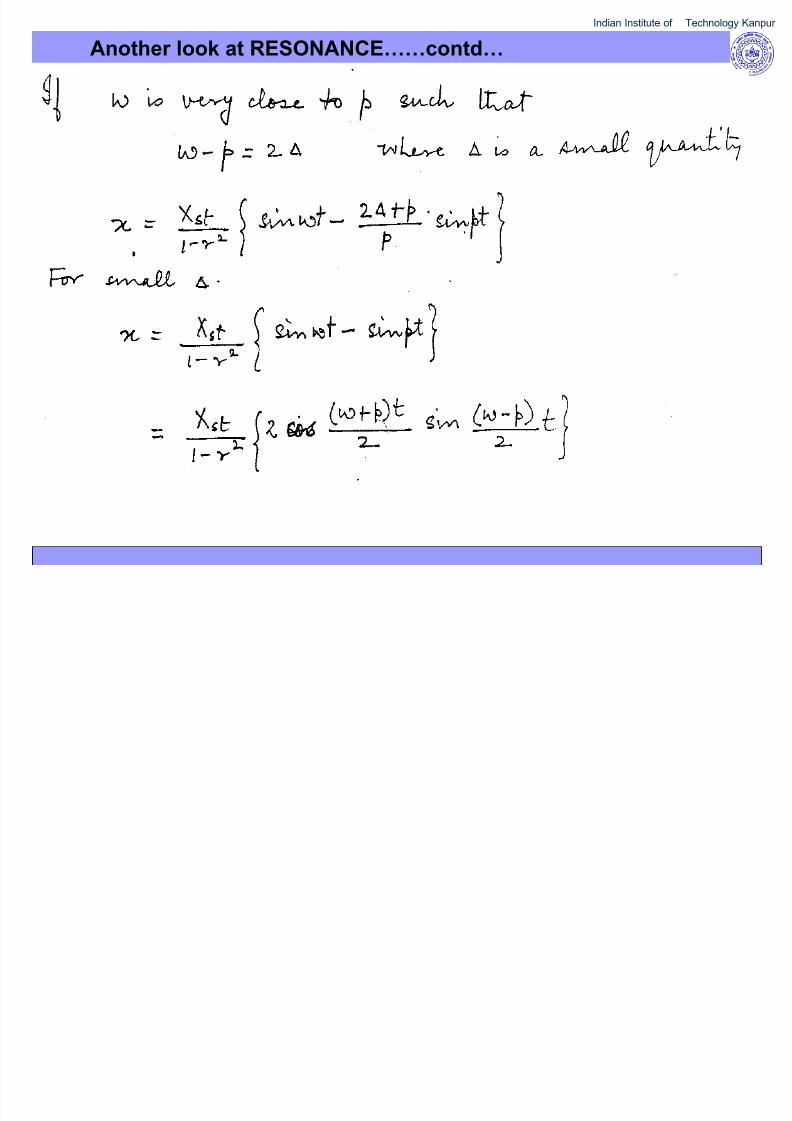
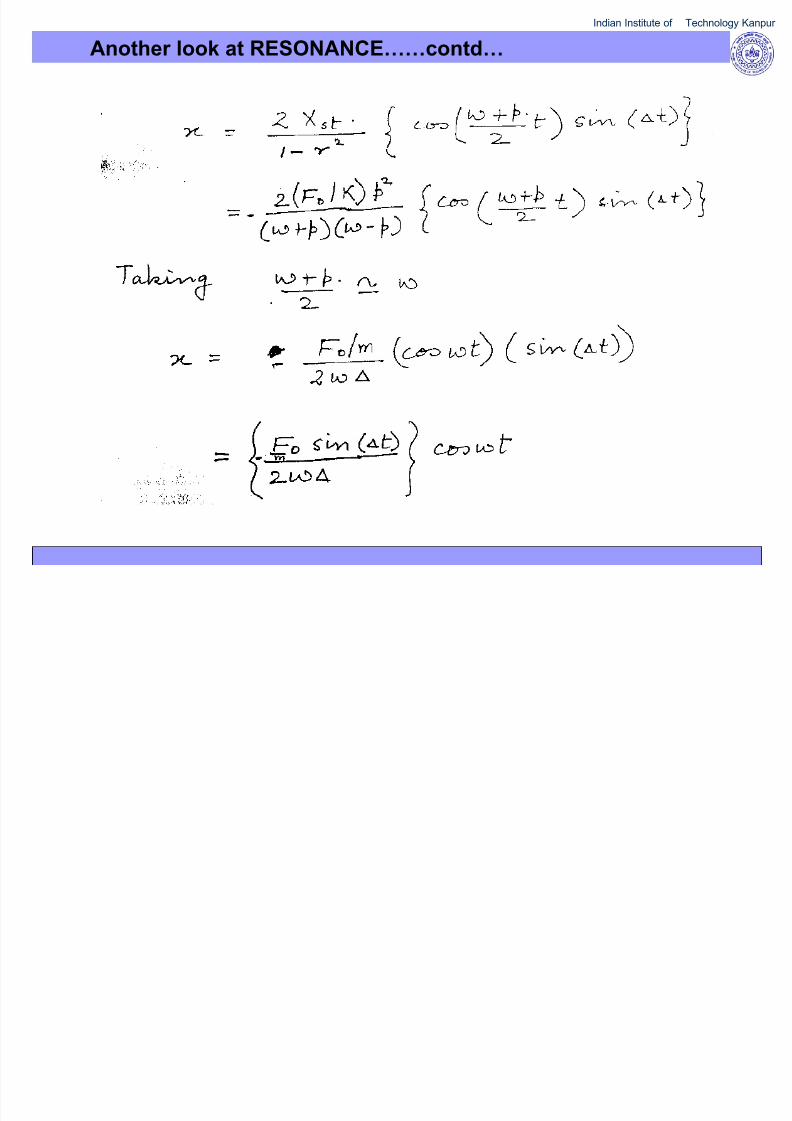
Another look at RESONANCE……contd…
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 51/283
Another look at RESONANCE……contd…
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 52/283
Another look at RESONANCE……contd…
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 53/283
Another look at RESONANCE……contd…
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 54/283
Q-FACTOR
ζ
ζ
ζ
2
1
)2()1(
1
& )2()1(
:have We
1r
0
1
222
1r
0
0
1r
0
0
222
00
=
=→
+−=
=
=
=+−
=
=
==
=
d
xQ
r r k
F
x
d
xQ
k
F d
r r k
F x
r
1r
deflection Static
amplitudeResonant 0
=
==d
xQ
Inverse of Damping Ratio x 2
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 55/283
HALF-POWER POINTS
Half-power pointsX0 /d
ω
Q
Q/1.414
r =1
1.0
points.power half called are
2
amplitude
toingcorrespond sFrequencie
−
=Q
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 56/283
DAMPING ESTIMATION FROM AN FRF
2)(such that Determine
/at 1
)()(
1222
0
0
res
n
n
res
H
H
mk c
H
cmk F
xH
=
===
+−==
ω ω
ω ω ω
ω ω
Q
H H H t
ccmk
n
res
nn
1 2kmc shown that becanIt
2)()( such tha & sfrequencie 2 are There
) (inequation quadratic a Yields
2
1
)()(
1
12
212 1
2
222
==−
==
→=
+−
→
≈ ζ ω ω ω
ω ω ω ω
ω
ω
ω ω ω
ω1
ω2
ωn
resH H
2)()( 21
resH H H == ω ω
ω
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 57/283
PHASOR DIAGRAM FOR F=F 0sinωt
π π ω += 2n t
sin0 t F ω 0F t ω
π ω 2n =t
-50
50
0 0.04 0.08 0.12
π π ω 22n +=t
F0 is rotating with speed ω
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 58/283
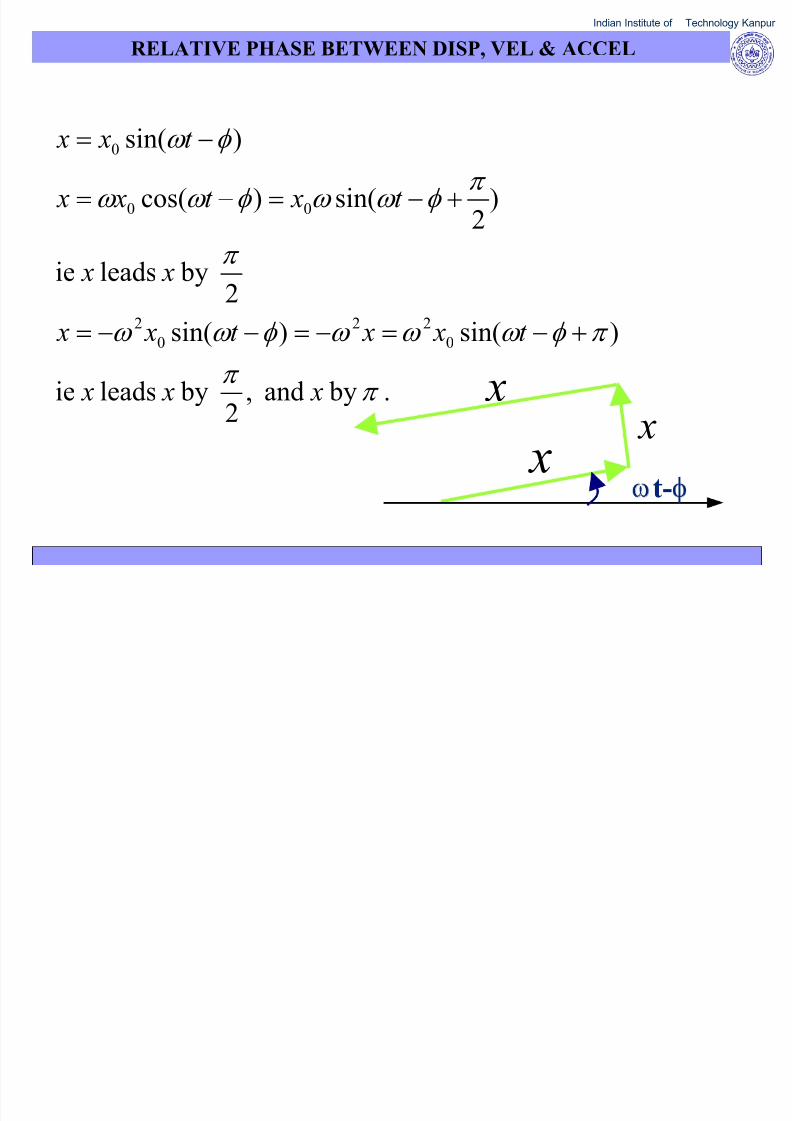
RELATIVE PHASE BETWEEN DISP, VEL & ACCEL
. by and ,2by leads ie
)sin( )sin(2
by leads ie
)2sin()cos(
)sin(
0
22
0
2
00
0
π
π
π φ ω ω ω φ ω ω
π
π
φ ω ω φ ω ω
φ ω
xxx
t xxt xx
xx
t xt xx
t xx
&&&
&&
&
&
+−=−=−−=
+−=−=
−=
x&&
x&x
ωt-φ
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 59/283
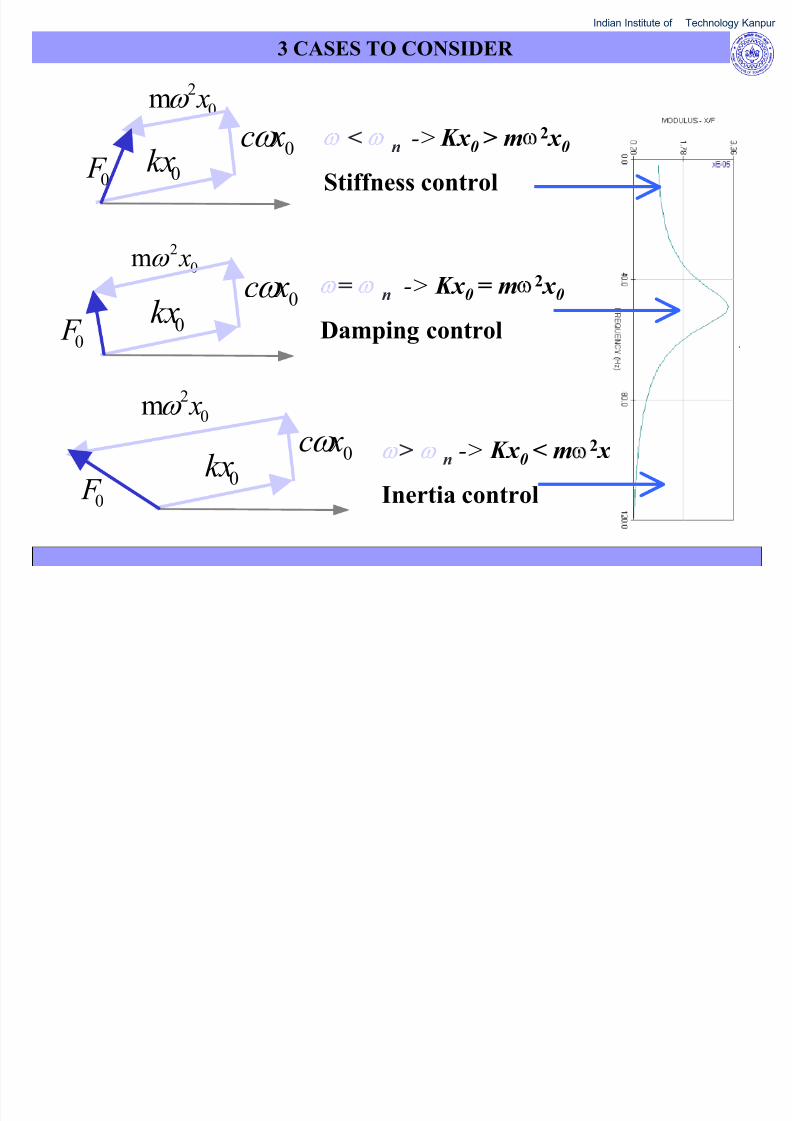
3 CASES TO CONSIDER
m 0
2
xω
m 02xω
0xcω 0kx
0F
ω> ωn
-> Kx 0< mω2x
0
Inertia control
m 0
2xω
0xcω
0kx0F
ω= ωn
-> Kx 0= mω2x
0
Damping control
0xcω 0kx
0F ω < ω
n-> Kx
0> mω2x
0
Stiffness control
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 60/283
Indian Institute of Technology Kanpur
A O SO A O
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 61/283
VIBRATION ISOLATION
Indian Institute of Technology Kanpur
CAR ENGINE

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 62/283
CAR ENGINE
• Large forces over a wide
frequency range.• They arise from the crank-
connecting-rod-piston system
and combustion process.
• If transmitted to the car body,
severe noise and vibration in
the passenger compartment.
• The engine is therefore
mounted on rubber blocks.
Indian Institute of Technology Kanpur
TYPICAL ISOLATION MOUNTS

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 63/283
TYPICAL ISOLATION MOUNTS
UNDAMPED
SPRING MOUNT
DAMPED SPRING
MOUNT
PNEUMATIC
RUBBER MOUNT
Indian Institute of Technology Kanpur
HIGH SPEED PUNCH PRESS ON RUBBER MOUNTS
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 64/283
HIGH-SPEED PUNCH PRESS ON RUBBER MOUNTS
MOUNTS
Indian Institute of Technology Kanpur
BASIC THEORY

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 65/283
BASIC THEORY
Source of
vibration
0Force Excitation
edtransmittForce :ratio theis know want toWhat we
:damper and spring thetodue is ground toedtransmittforce The
F
F xckxF
T
T
=+=
&
FT sin(ωt+θ)
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 66/283
m 0
2xω
0
xcω
0kxωt-φ
φ
0F
F T
km
c
r
r r r
cmk ck
F F T
n
T
2 and where
) 2()1() 2(1
)()()(
:bygiven is T, ibility,transmissSo,
222
2
222
22
0
==
+− +=+− +==
ζ ω
ω
ζ ζ
ω ω ω
)()(
:thatknow we4, Lecture From)(F
:diagramphasor theFrom
222
0
0
22
0T
ω ω
ω
cmk
F
x
ck x
+−=
+=
Indian Institute of Technology Kanpur
HOW TO OBTAIN LOW TRANSMISSIBILITY ?
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 67/283
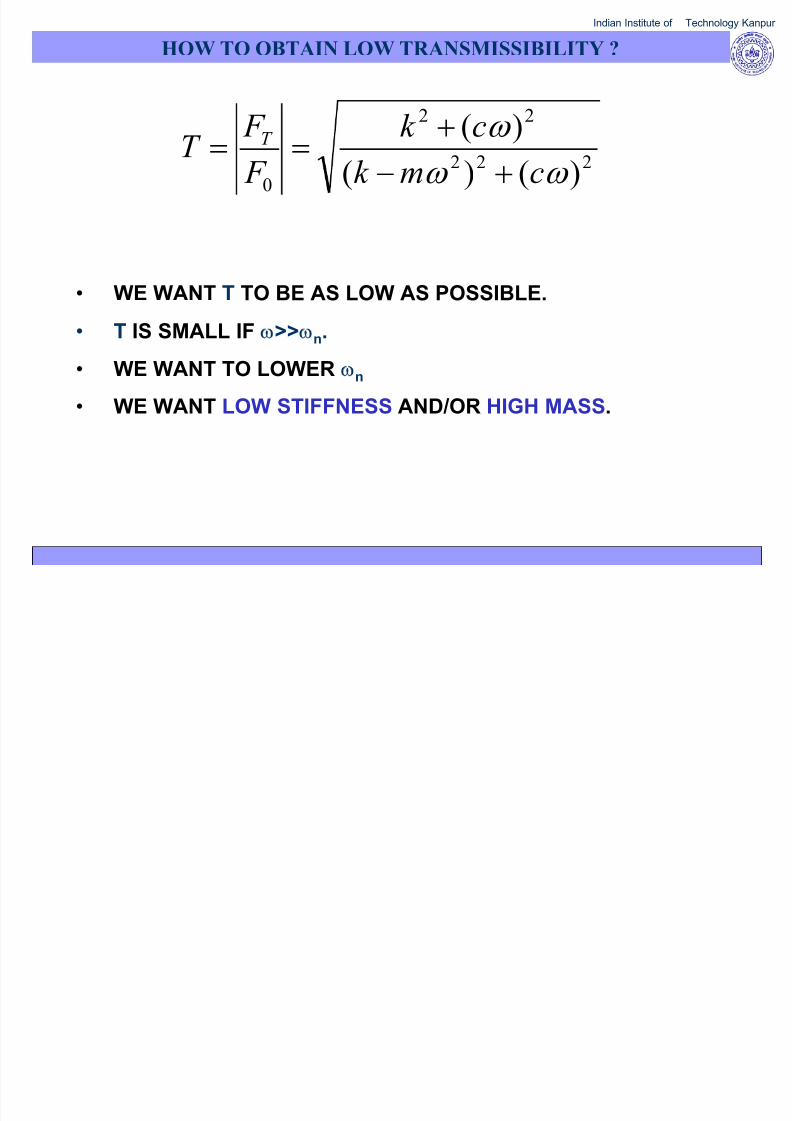
HOW TO OBTAIN LOW TRANSMISSIBILITY ?
222
22
0 )()(
)(
ω ω
ω
cmk
ck
F
F T T
+−+
==
• WE WANT T TO BE AS LOW AS POSSIBLE.
• T IS SMALL IF ω>>ωn.
• WE WANT TO LOWER ωn
• WE WANT LOW STIFFNESS AND/OR HIGH MASS.
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 68/283
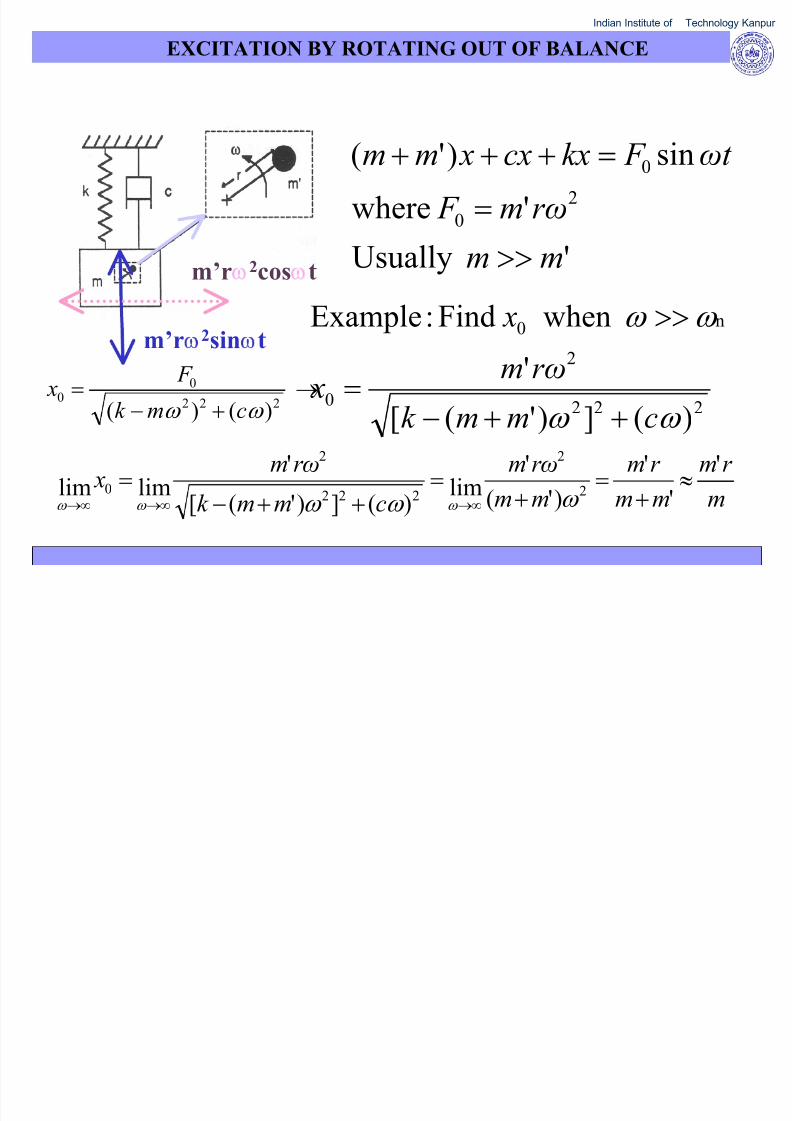
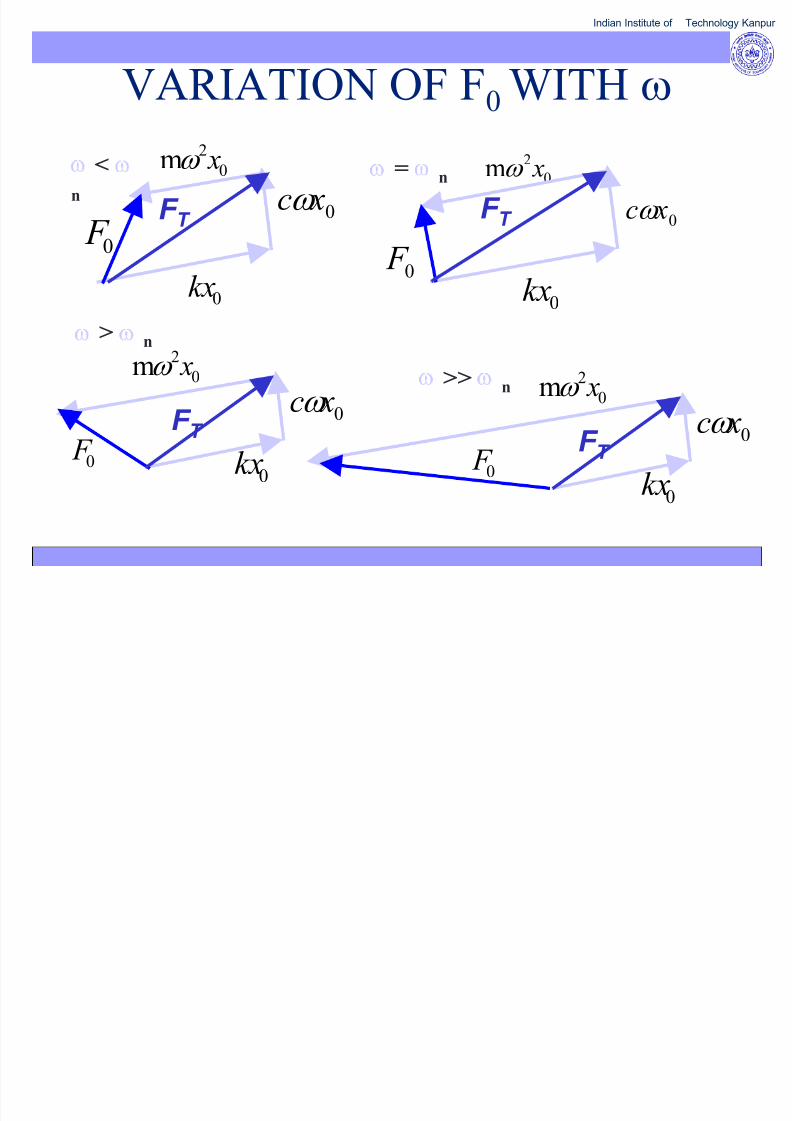
VARIATION OF F0 WITH ω m 0
2xω m 0
2xω
0xcω
0kx
0F
F T 0xcω
0
kx
0F F T
m 0
2xω
0xcω
0kx0F F T
m 0
2xω
0xcω
0
kx0F
F T
ω < ωn
ω = ω n
ω > ω n
ω >> ω n
Indian Institute of Technology Kanpur
TRANSMISSIBILITY CURVES

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 69/283
TRANSMISSIBILITY CURVES
TRAN
SMISS
IBILTY
FT/F0
AMPLIFICATION T> 1 ISOLATION T< 1
Indian Institute of Technology Kanpur
EFFECT OF DAMPING IN THE ISOLATION REGION

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 70/283
EFFECT OF DAMPING IN THE ISOLATION REGION
TRA
NSMISS
IBILTY FT/F0
LESS ISOLATION WITH INCREASING DAMPING
DECREASING
T
Indian Institute of Technology Kanpur
EXAMPLE: ISOLATION OF RAIL NOISE

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 71/283
EXAMPLE: ISOLATION OF RAIL NOISE
RUBBERPADS
Before isolation
After isolation
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 72/283
Lecture –3
Multi-Degree of Freedom Systems
+ Modal Analysis

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 73/283
Indian Institute of Technology Kanpur
EXAMPLES OF SDOF AND 2-DOF SYSTEMS

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 74/283
EXAMPLES OF SDOF AND 2-DOF SYSTEMS
SDOF
SYSTEM
2-DOF SYSTEMS
Indian Institute of Technology Kanpur
Multi Degree of Freedom Systems

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 75/283
Multi Degree of Freedom Systems
• Real life systems are complex, they can bend, twist and elongate in
axial direction, the mass is distributed, not discrete as assumed inthe simple models, similarly, elasticity is distributed, there are no
perfect springs without mass …
• In reality we have infinite degrees of freedom in a system, for
convenience, we can model them as finite degrees of freedomsystems.
• The methods of modeling have been refined over the years
depending on the computational facilities available at respective
times.
• We will illustrate some methods that allowed us to understand the
way real life practical systems behave and derive (rather study)
some properties of significance to practical vibration engineers and
diagnostics.
Indian Institute of Technology Kanpur
DETAILED ANALYSIS OF A 2-DOF SYSTEM

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 76/283
DETAILED ANALYSIS OF A 2 DOF SYSTEM
ELONGATION OF k 1: x1
STEP 1: SPRING DEFLECTIONS
COMPRESSION OF k 2: (x1-
x2) DUE TO DISPLACEMENT
OF BOTH ENDS
REFERENCE
DEFLECTED
k1 force
k2 forcek2 force
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 77/283
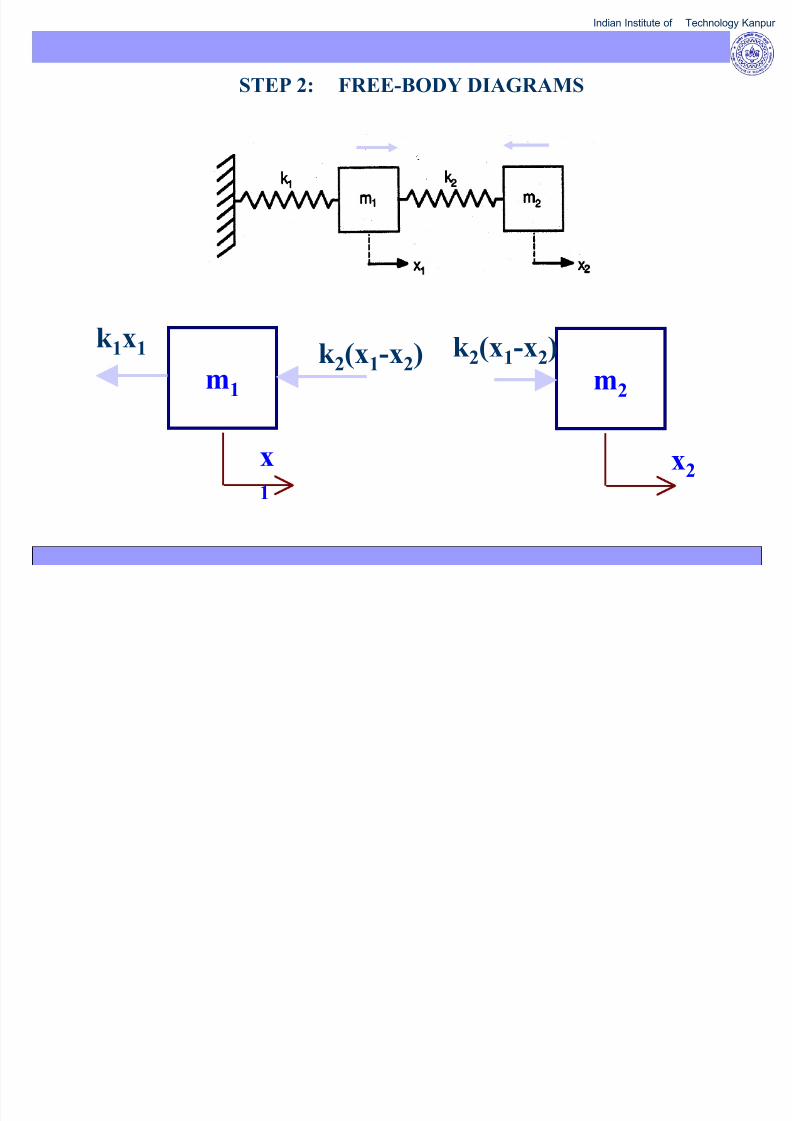
STEP 2: FREE-BODY DIAGRAMS
m1 m2
k 2(x1-x2)k 1x1 k 2(x1-x2)
x
1
x2
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 78/283
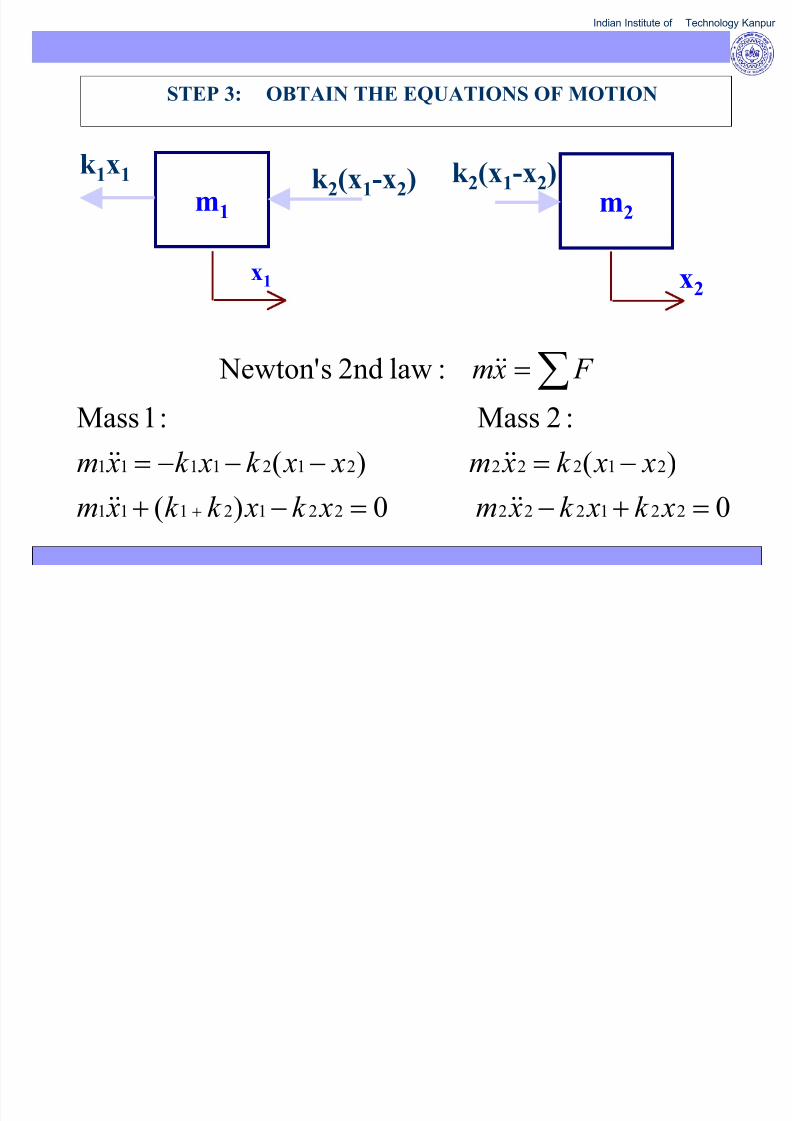
STEP 3: OBTAIN THE EQUATIONS OF MOTION
0 0)(
)( )(
:2 Mass :1 Mass
:law 2nd sNewton'
2212222212111
212222121111
=+−=−+
−=−−−=
=
+
∑
xk xk xmxk xk k xm
xxk xmxxk xk xm
F xm
&&&&
&&&&
&&
m1 m2
k 2(x1-x2)k 1x1 k 2(x1-x2)
x1 x2
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 79/283
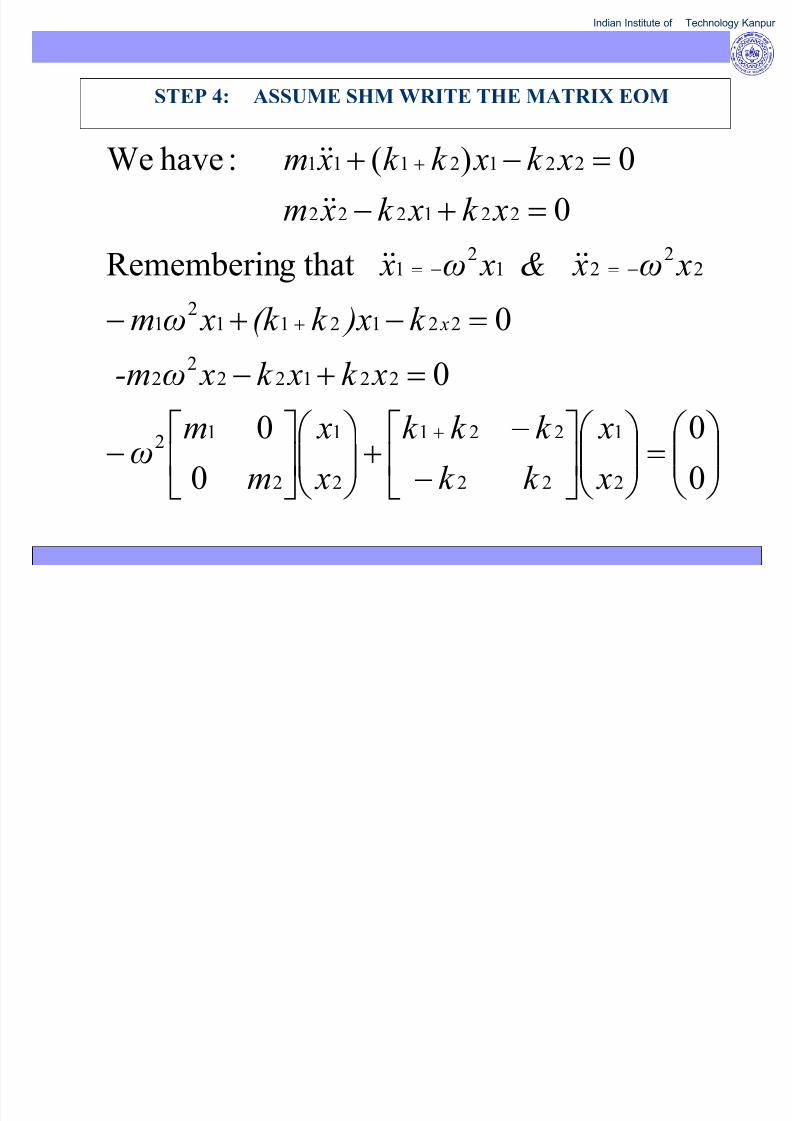
STEP 4: ASSUME SHM WRITE THE MATRIX EOM
=
−
−+
−
=+−
=−+−
=+−
=−+
+
+
−=−=
+
0
0
0
0
0
0
thatgRememberin
0
0)( :have We
2
1
22
221
2
1
2
12
221222
2
22121121
22
212
1
221222
2212111
x
x
k k
k k k
x
x
m
mω
xk xk xω-m
k )xk (k xωm
xωx&xωx
xk xk xm
xk xk k xm
x
&&&&
&&
&&
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 80/283
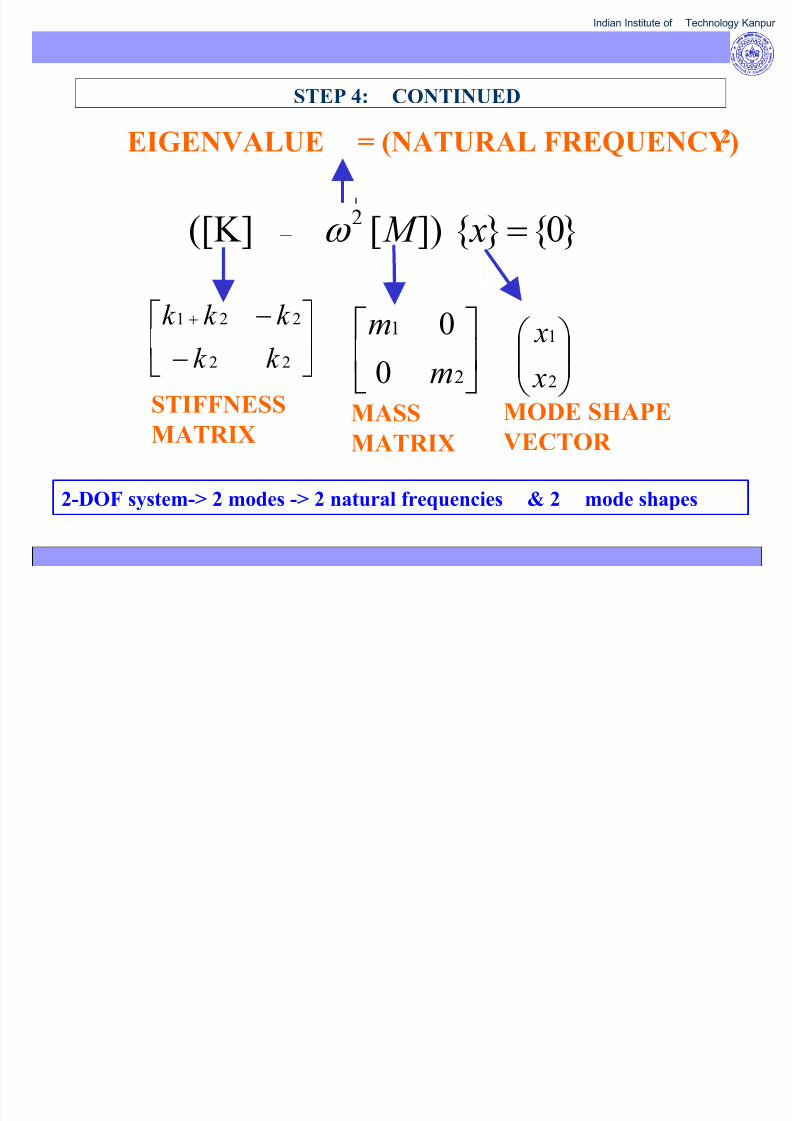
STEP 4: CONTINUED
0 ])[ ([K] 2 =− xM ω
2
1
0
0
m
m
2
1
x
x
−
−+
22
221
k k
k k k
STIFFNESSMATRIX
MASSMATRIX
MODE SHAPEVECTOR
EIGENVALUE = (NATURAL FREQUENCY)2
2-DOF system-> 2 modes -> 2 natural frequencies & 2 mode shapes
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 81/283
STEP 5: CHECK SYMMETRY & POSITIVE MAIN DIAGONAL
THE MASS & STIFFNESS MATRICES MUST BE SYMMETRIC.
THE MAIN DIAGONAL ELEMENTS MUST BE POSITIVE.
−
−+
22
221
k k
k k k
2
1
0
0
m
m
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 82/283
STEP 6: OBTAIN THE NATURAL FREQUENCIES
FOR LARGE N, THERE ARE MANY NUMERICAL SOLUTION TECHNIQUES.
USE DET=0 FOR SMALL SYSTEMS.
n2)n1( n2.n1
2
2
222
212
21
2
2
22
212
212-
2-
2-
& :sfrequencie natural 2 in Quadratic
0))((
0 0 ])[ ([K]det
:solution trivialnon aFor
0or 0 ])[ ([K]det
0 ])[ ([K]
ω ω ω ω
ω ω ω
ω ω
ω
ω
≤→
=−−→
=
−−
−→=
−
==→=
−+
−+
ω
k mk mk k mk k
k mk k M
xM
xM
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 83/283
STEP 7: OBTAIN THE MODE SHAPES
Insert ωn1 into ([K]-ω 2[M])x=0
By definition, det([K]- ω n1
2
[M])=0x1 & x2 are linearly dependent, but we can obtain x1/x2
2
2
2121
1
2
2
2
1121
1
2
2212112
1
2
1
:mode 2nd for the Similarly,
:
0 :result previous theUsing
k
mk k
x
x
k
mk k
x
xHence
xk )xk (k xω
m
n
n
n
n
ω
ω
ω ω
ω ω
−=
−=
=−+−
+
=
+
=
+
Indian Institute of Technology Kanpur
MODE SHAPE INTERPRETATION
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 84/283
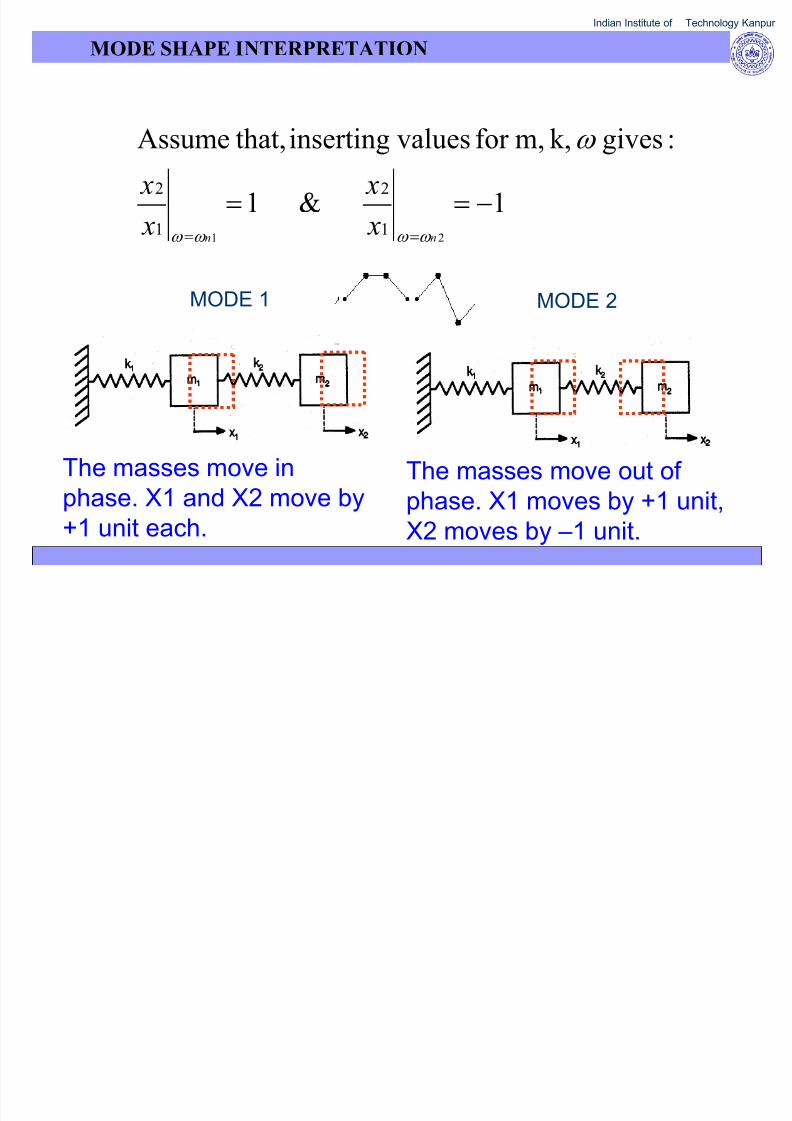
1 & 1
:gives k, m,for valuesinsertingthat,Assume
211
2
1
2
−== == nnx
x
x
x
ω ω ω ω
ω
MODE 1 MODE 2
The masses move in
phase. X1 and X2 move by+1 unit each.
The masses move out of
phase. X1 moves by +1 unit,X2 moves by –1 unit.

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 85/283
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 86/283
3 DOF SYSTEM
FREQUENCYTIME
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 87/283
MODAL SUPERPOSITIONMODE 1
MODE 2 MODE 3
= + +
= + +
TIME DOMAIN
FREQUENCY DOMAIN
Indian Institute of Technology Kanpur
Torsional System

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 88/283
One of the earliest fatigue failures experienced
is that of the propeller shaft of a steam engine
driven naval ship during the I world war. It was
reported that the propeller shaft (which has the
lowest torsional stiffness in the system because
of its length) upon its failure was stiffened by
increasing its diameter, however, it failed
earlier. Then it was identified that the excitationbecame closer to the new natural frequency
causing fatigue failure in lesser time. From then
onwards, torsional analysis became mandatory
for all reciprocating installations.
• Briefly, we will talk about simple modeling adopted for torsional analysis of a reciprocating diesel engine
driving a generator.
• All the 8 cylinders are considered as discs, whose rotational mass moments of inertia can be determined
and connected by equivalent torsional stiffnesses of the crank shaft.
• The damper connected to cylinder 8 is divided into two separate disks.
• The coupling stiffness is usually the lowest when compared to the stiffness of any of the shaft sections in
the train.
• The generator is modeled as one rotor
• A model thus derived (the details to arrive these values is out of current scope) is given in the next slide.
Indian Institute of Technology Kanpur
Reciprocating Engine Installation
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 89/283
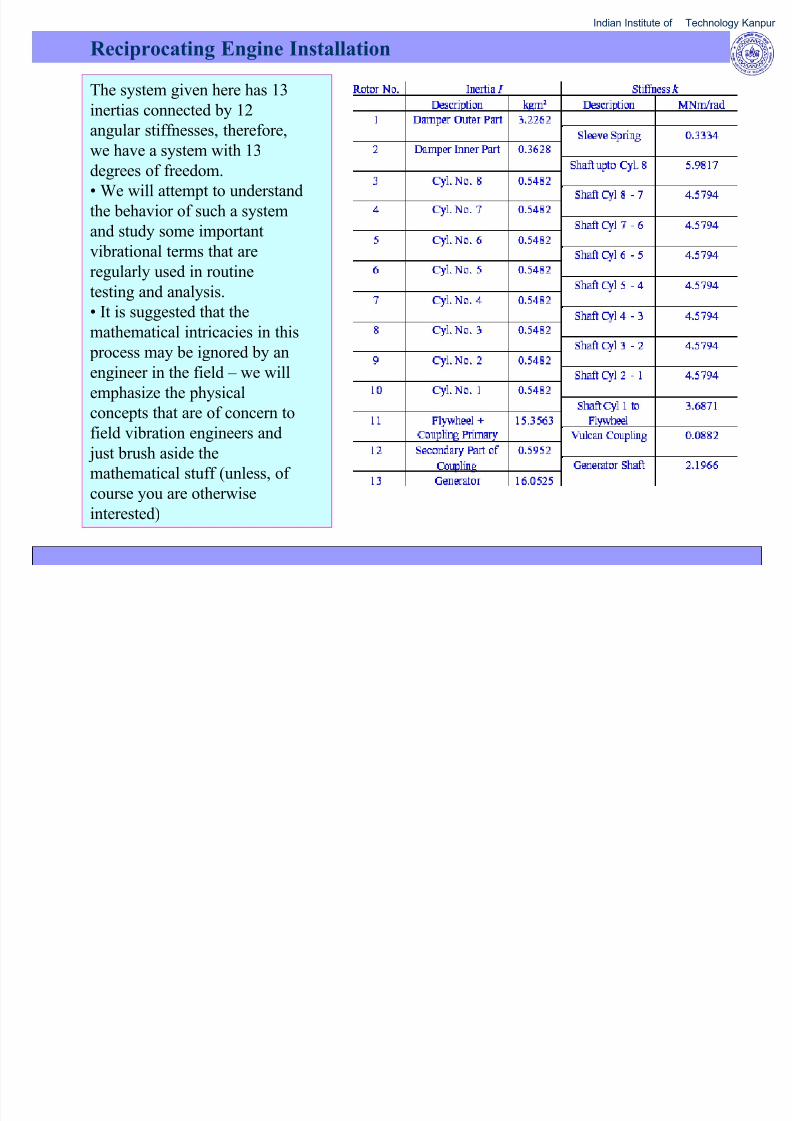
The system given here has 13
inertias connected by 12angular stiffnesses, therefore,
we have a system with 13
degrees of freedom.
• We will attempt to understand
the behavior of such a systemand study some important
vibrational terms that are
regularly used in routine
testing and analysis.
• It is suggested that themathematical intricacies in this
process may be ignored by an
engineer in the field – we will
emphasize the physical
concepts that are of concern tofield vibration engineers and
just brush aside the
mathematical stuff (unless, of
course you are otherwise
interested)
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 90/283
• These are governing differential
equations of motion written from
equilibrium conditions, 13 for 13 inertias
• These equations are written in a compactmatrix form
• Mass Matrix
• Stiffness Matrix
[ ] [ ]
[ ]
[ ]
− −−+−
−−
−
=
=
=+
=+−
=−++−
=−+
1212
12...3322
211
11
13
3
2
1
0
0
131312121313
...
0332)21(1122
0211111
k k k k k k k
k k k
k k
M
I
I
I I
M
K M
K k I
K k k k I
k k I
θ θ
θ θ θ
θ θ θ θ
θ θ θ
&&
&&
&&
&&
Indian Institute of Technology Kanpur
Free Vibration - Mode Shapes
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 91/283
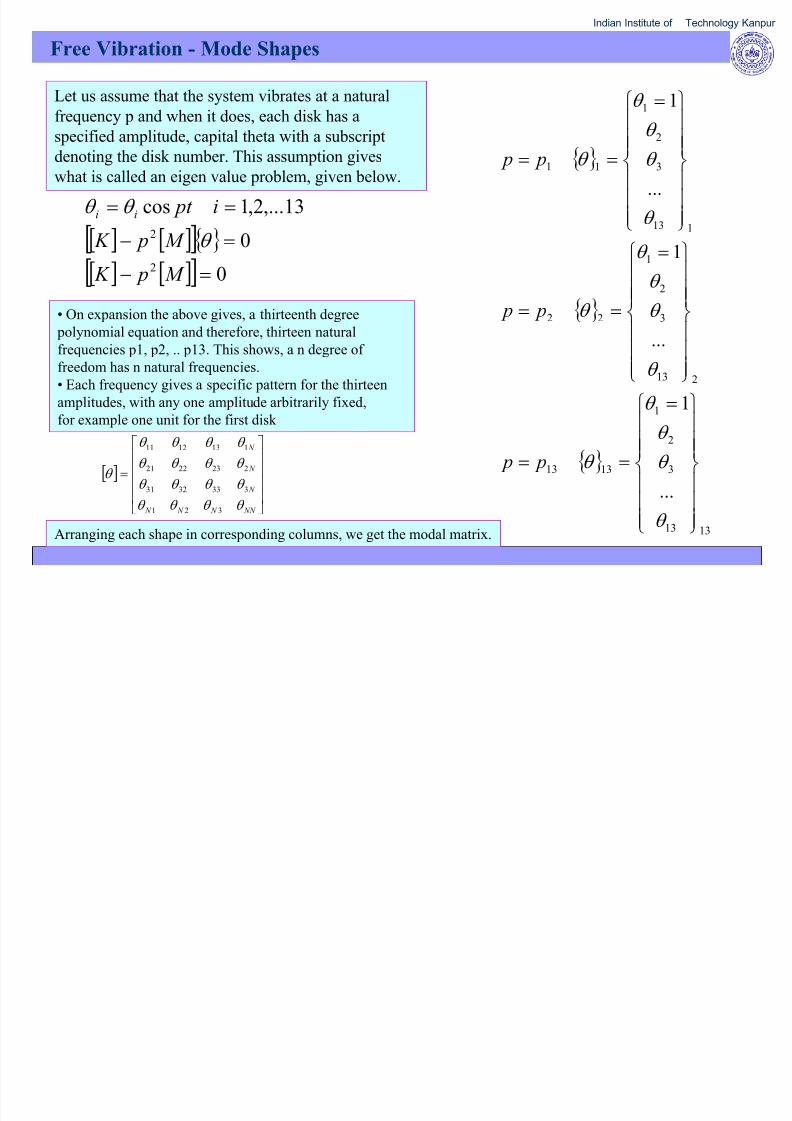
Let us assume that the system vibrates at a natural
frequency p and when it does, each disk has a
specified amplitude, capital theta with a subscript
denoting the disk number. This assumption gives
what is called an eigen value problem, given below.
• On expansion the above gives, a thirteenth degree
polynomial equation and therefore, thirteen natural
frequencies p1, p2, .. p13. This shows, a n degree of
freedom has n natural frequencies.
• Each frequency gives a specific pattern for the thirteen
amplitudes, with any one amplitude arbitrarily fixed,for example one unit for the first disk
Arranging each shape in corresponding columns, we get the modal matrix.
[ ] [ ][ ]
[ ] [ ][ ] 0
013,...2,1cos
2
2
=−
=−==
M pK
M pK ipt ii
θ θ θ
[ ]
=
NN N N N
N
N
N
θ θ θ θ
θ θ θ θ
θ θ θ θ
θ θ θ θ
θ
321
3333231
2232221
1131211
1313
3
2
1
1313
213
3
2
1
22
113
3
2
1
11
...
1
...
1
...
1
=
==
=
==
=
==
θ
θ
θ θ
θ
θ
θ
θ
θ
θ
θ
θ
θ θ
θ
pp
pp
pp
Indian Institute of Technology Kanpur
Bending Vibration

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 92/283
• The conclusions in the previous slide are not restricted to
torsional vibrations alone, they are true for all kinds of
vibration, bending, torsion, axial, combined bending and
torsion etc.
• Here, in this slide we show how the same equations can be
derived for bending, by using influence coefficient approach.• In all vibration problems, the first thing is to set up a
workable
mathematical model, write the eigen value formulation,
determine the natural frequencies and mode shapes.
• Modern FE codes, ANSYS, NASTRAN …use finite
elements, make a CAD model, mesh and ask for the natural
frequencies and mode shapes.
[ ][ ] [ ]
[ ] [ ] [ ]
[ ] [ ] 0
0
0
0......
0...0...
1
1222111
2222221121
1122121111
=+
=+
=+
=++++
=++++
=++++
−
xK xM
xI xM
xI xM
xxmxmxm
xxmxmxmxxmxmxm
nnnnnn
nnn
nnn
&&
&&
&&
&&&&&&
&&&&&&
&&&&&&
α
α
α α α
α α α α α α
Indian Institute of Technology Kanpur
FORCED RESPONSE

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 93/283
THE RESPONSE OF THE SYSTEM TO SOME GIVEN
HARMONIC EXCITATION CAN BE FOUND USING A
TRANSFER FUNCTION APPROACH:
][])[ ([K]
:have weresponse, forcedFor orcex)
INPUTxFUNCTIONSYSTEMOUTPUT
12-
2
F H F M X
F[M]) Xω([K]F
ω
roperties,H(system pX -
==→
=
=
=
−ω
WE WANT THE NORMALIZED RESPONSE TO A SINGLE
EXCITATION, APPLIED TO EACH CO-ORDINATE IN
TURN SO THAT WE CAN OBTAIN THE TOTAL
RESPONSE BY SUMMATION.
Indian Institute of Technology Kanpur
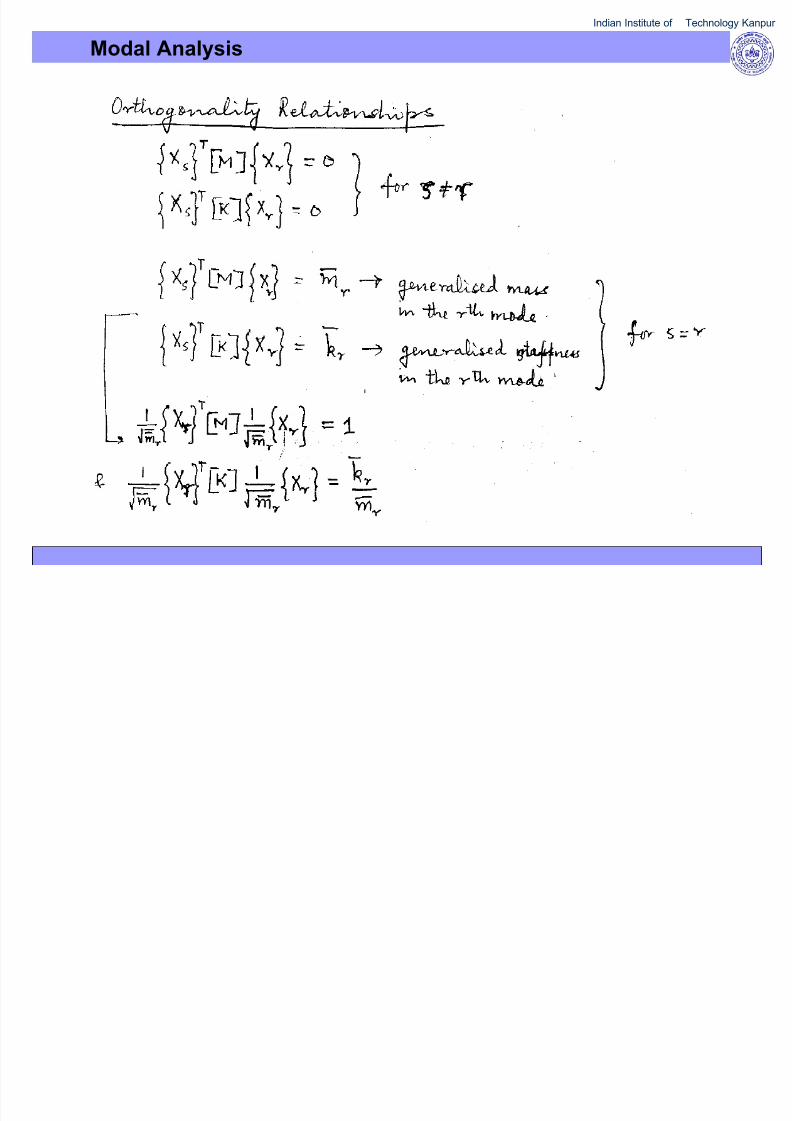
Orthogonality Conditions

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 94/283
• The mode shapes of a system have specialand useful properties that explain significant
physical observations. We will just state
them.
• Let us take two different modes, say rth and
sth modes. When they are multiplied withmass matrix or stiffness matrix, the result is
zero. This multiplication is orthogonalization
as written in a compact matrix form here.
• Generalized Mass – However, if we choose
the mode shapes r and s to be the same, say,r, we get rth mode generalized mass, similarly,
sth mode generalized stiffness.
• Remember, the mode shapes are
proportional, therefore the generalized mass
and stiffness depend upon the original shapesthat you choose – a unique way of choosing
the shapes is such that the generalized mass is
one unit and the stiffness is p2. They are then
called orthogonolized mode shapes.
[ ] [ ]
[ ] [ ]
[ ]
r
T
r
r
r T r
r T s
r T s
r r T s
r T s
um
u
uM u
sr k uM u
sr uK u
sr muM u
sr uM u
1~
1~~
0
0
=
=
==
≠=
==
≠=

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 95/283
Indian Institute of Technology Kanpur
Proportional Damping

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 96/283
• Damping matrix does not obey the
orthogonality properties stated earlier, hence, the
concept of a proportional damping is evolved,wherein, the damping matrix is taken to be the
sum of a mass matrix and stiffness matrix with
appropriate proportionality constants, a and b.
• If we know a and b we can find the
viscous damping ratio in the correspondingmode and thus use experimental value to
write damped modal equations.
• General finite element codes such as
ANSYS, NASTRAN … adopt betadamping in place of viscous damping..
[ ] [ ] [ ]
[ ] [ ] [ ] [ ]( )[ ] [ ]
[ ] [ ] [ ]( ) [ ]
K&&&
&&&
&&&
,2,1 02
22
2
0
0~~
2
2
22
2
==++
+=
+=
=+++
=+++
+=
r pp
p
p
pp
ppI I
pU K M U I
K M C
r r r r r r
r
r
r
r r r
T
η η ξ η
β α ξ
β α ξ
η η β α η
η η β α η
β α
Indian Institute of Technology Kanpur
Modal Analysis
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 97/283
Indian Institute of Technology Kanpur
Modal Analysis

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 98/283
Indian Institute of Technology Kanpur
Modal Analysis

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 99/283
Indian Institute of Technology Kanpur
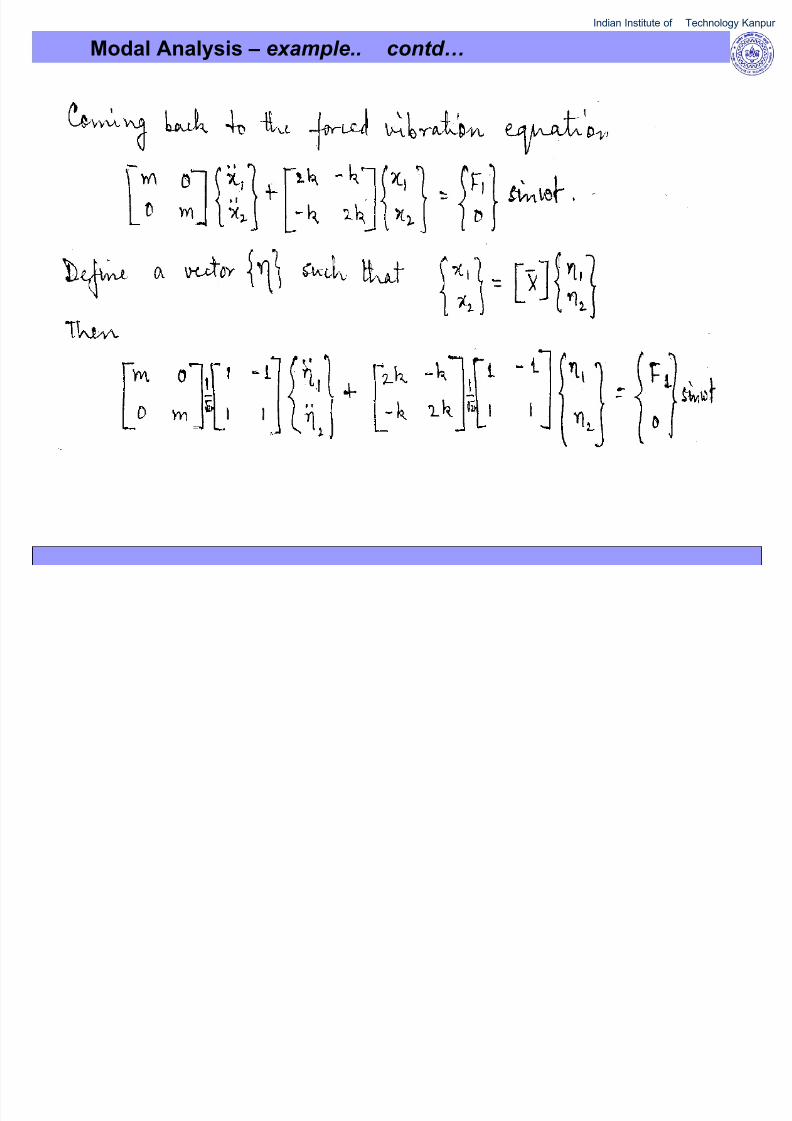
Modal Analysis - example

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 100/283
Indian Institute of Technology Kanpur
Modal Analysis – example.. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 101/283
Indian Institute of Technology Kanpur
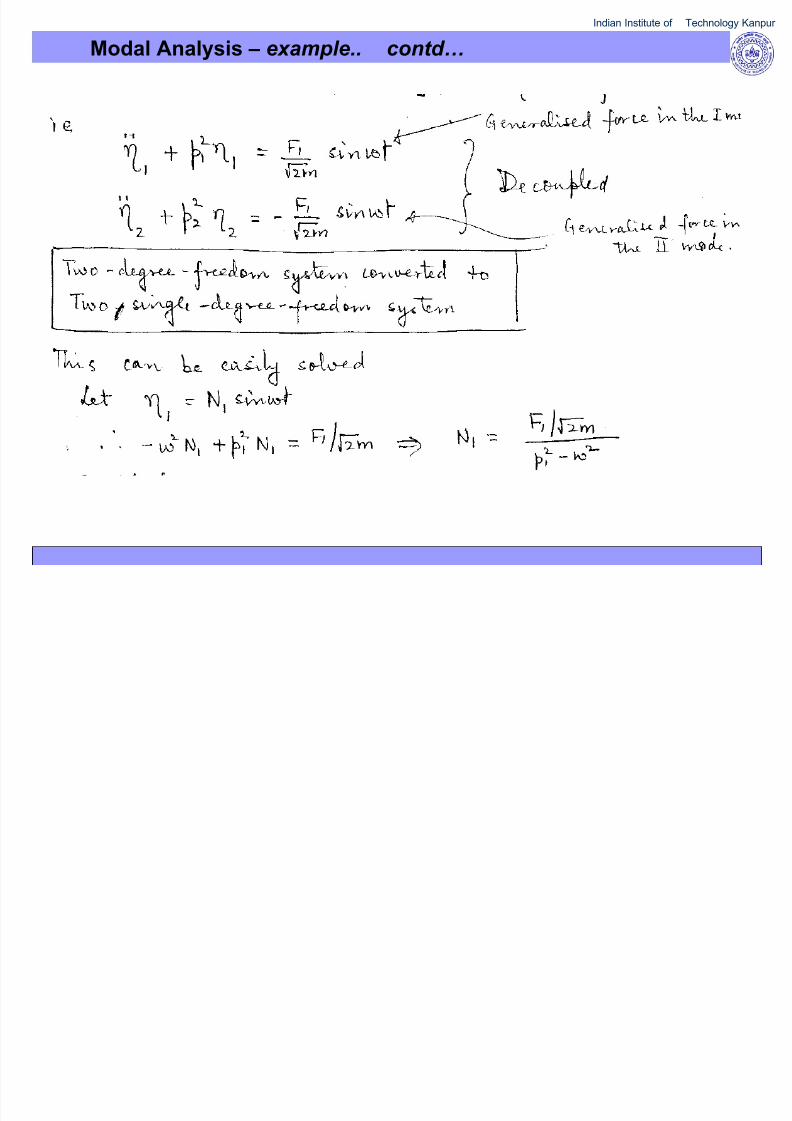
Modal Analysis – example.. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 102/283
Indian Institute of Technology Kanpur
Modal Analysis – example.. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 103/283
Indian Institute of Technology Kanpur
Modal Analysis – example.. contd…
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 104/283
Indian Institute of Technology Kanpur
Modal Analysis – example.. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 105/283
Indian Institute of Technology Kanpur
Modal Analysis – example.. contd…
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 106/283
Indian Institute of Technology Kanpur
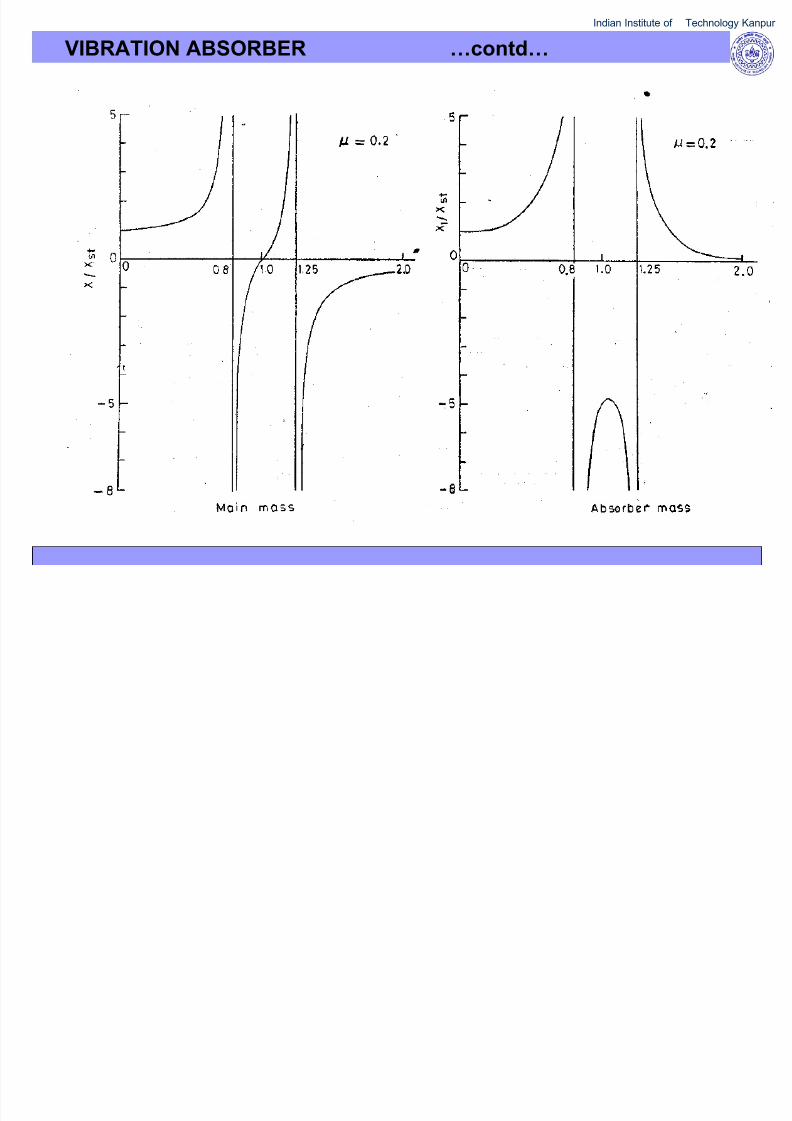
VIBRATION ABSORBER

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 107/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 108/283
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 109/283
LECTURE 4
Continuous Systems Approach

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 110/283
Indian Institute of Technology Kanpur
CONTINUOUS SYSTEMS WAVE EQUATIONcontd….

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 111/283
Axial vibration of Bars
Indian Institute of Technology Kanpur
CONTINUOUS SYSTEMS WAVE EQUATIONcontd….

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 112/283
Torsional vibration of RODS
Indian Institute of Technology Kanpur
Solution of WAVE EQUATION

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 113/283
Indian Institute of Technology Kanpur
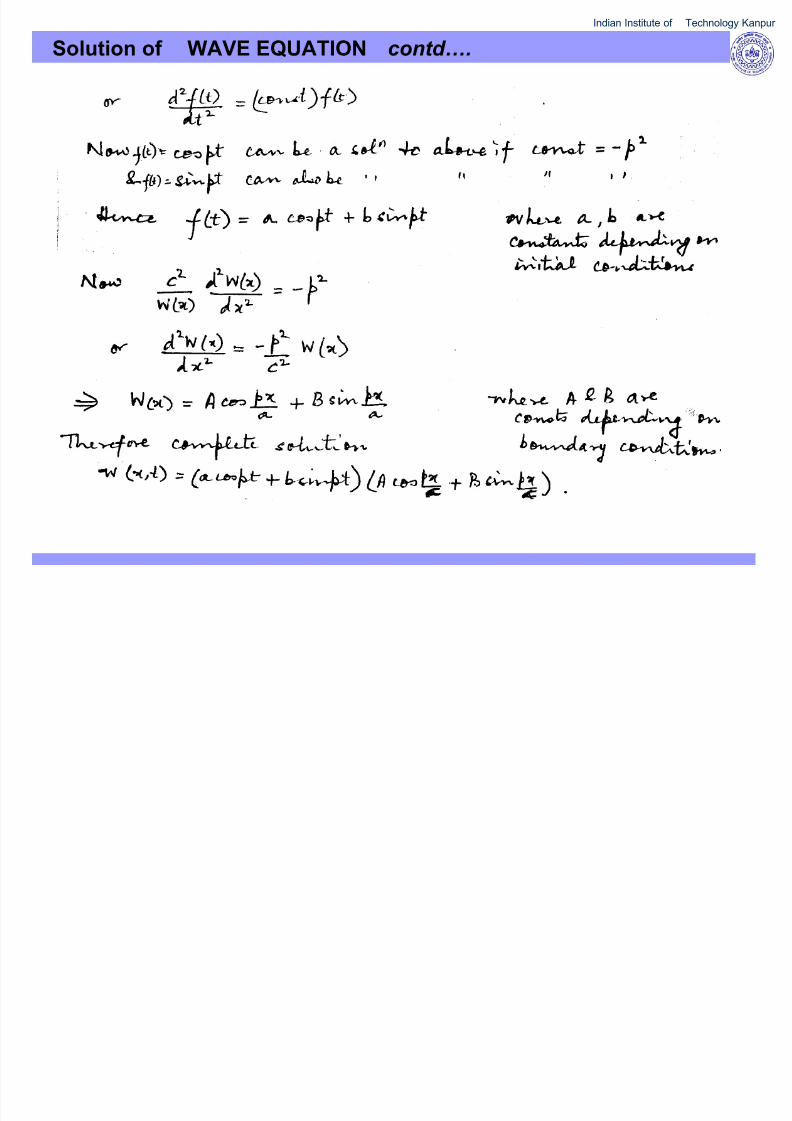
Solution of WAVE EQUATION contd….
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 114/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 115/283
Indian Institute of Technology Kanpur
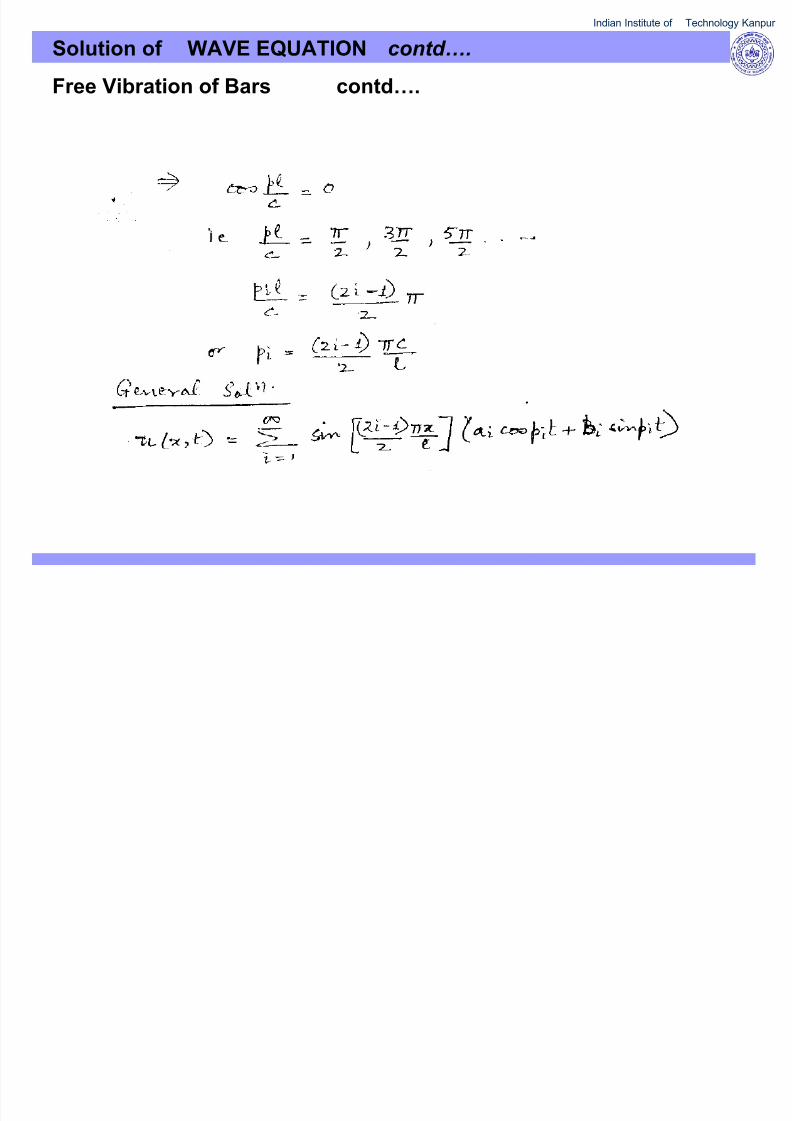
Solution of WAVE EQUATION contd….
F Vib ti f B

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 116/283
Free Vibration of Bars
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 117/283
Indian Institute of Technology Kanpur
BEAMS Bending Vibrations

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 118/283
Indian Institute of Technology Kanpur
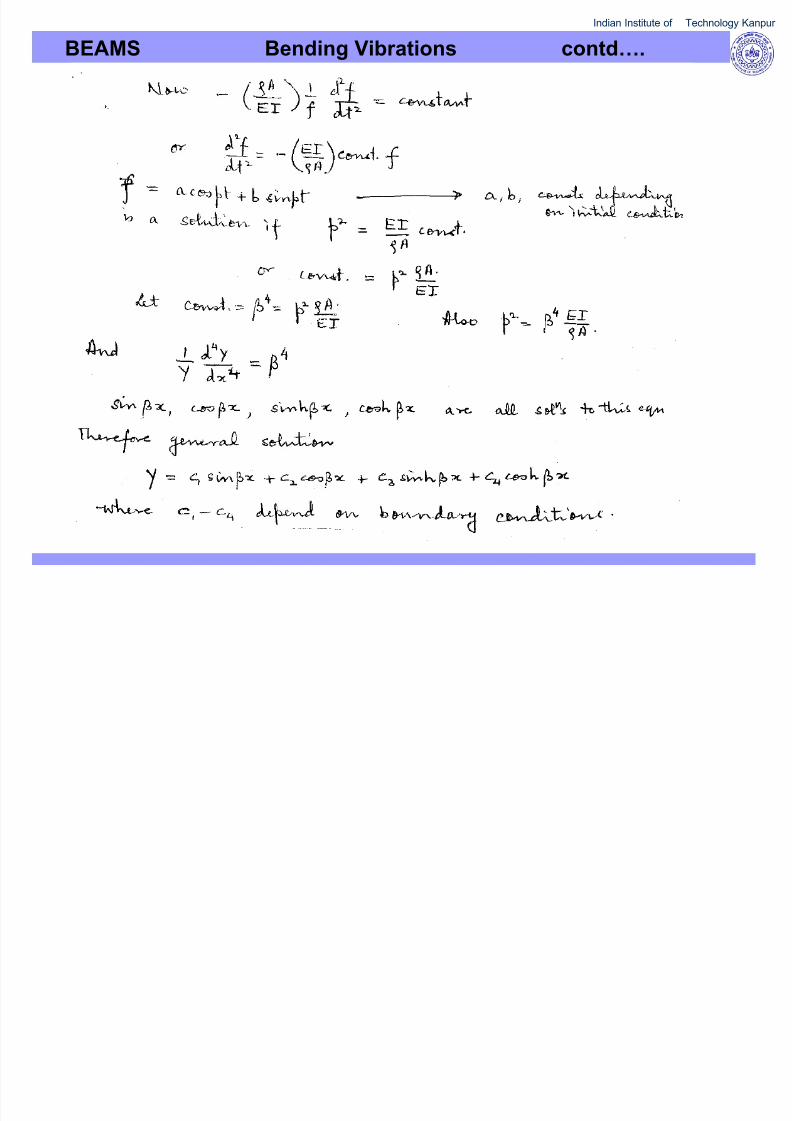
BEAMS Bending Vibrations contd….

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 119/283
Indian Institute of Technology Kanpur
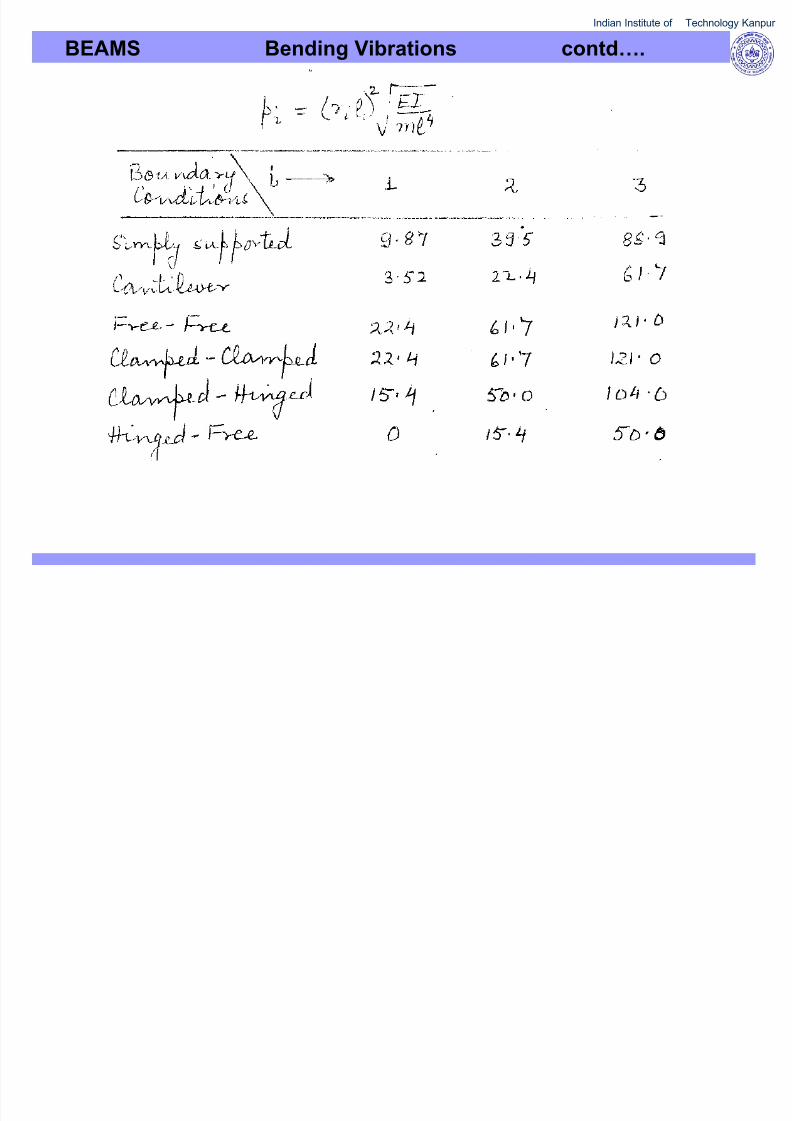
BEAMS Bending Vibrations contd….
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 120/283
Indian Institute of Technology Kanpur
BEAMS Bending Vibrations contd….

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 121/283
Indian Institute of Technology Kanpur
BEAMS Bending Vibrations contd….

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 122/283
Indian Institute of Technology Kanpur
BEAMS Bending Vibrations contd….
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 123/283
Indian Institute of Technology Kanpur
BEAMS Bending Vibrations contd….

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 124/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 125/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 126/283
Indian Institute of Technology Kanpur
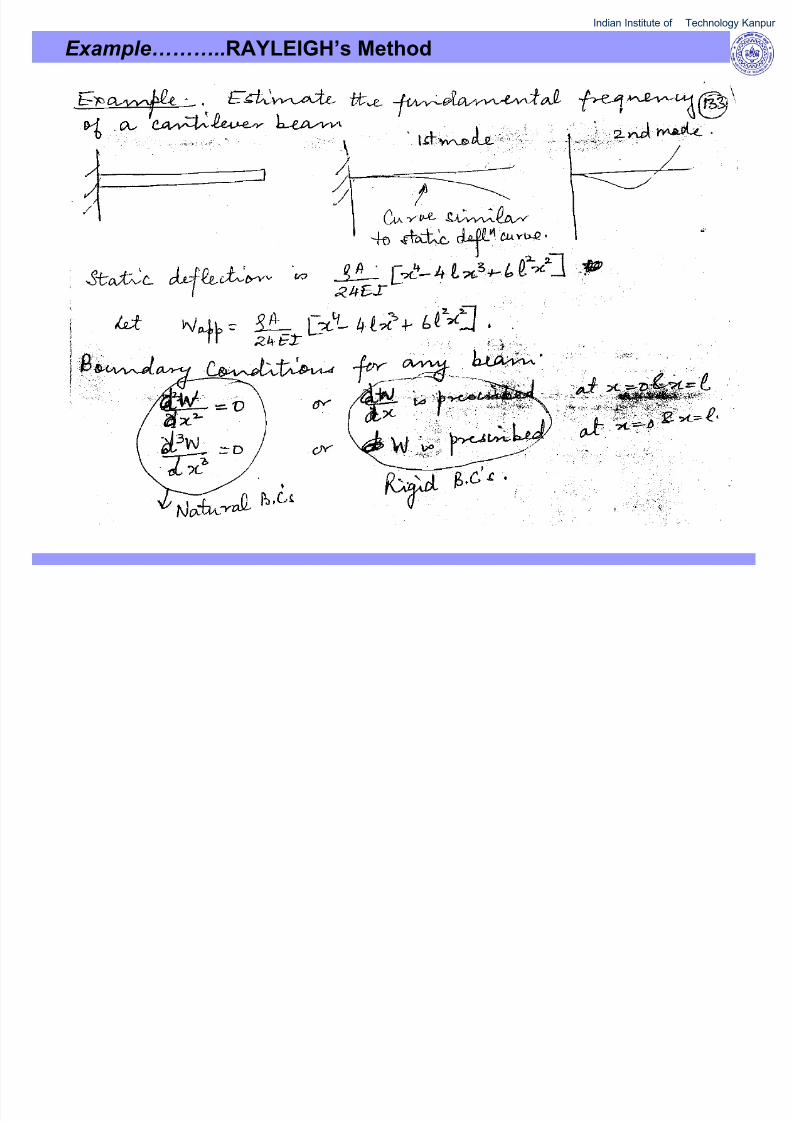
Example………..RAYLEIGH’s Method
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 127/283
Indian Institute of Technology Kanpur
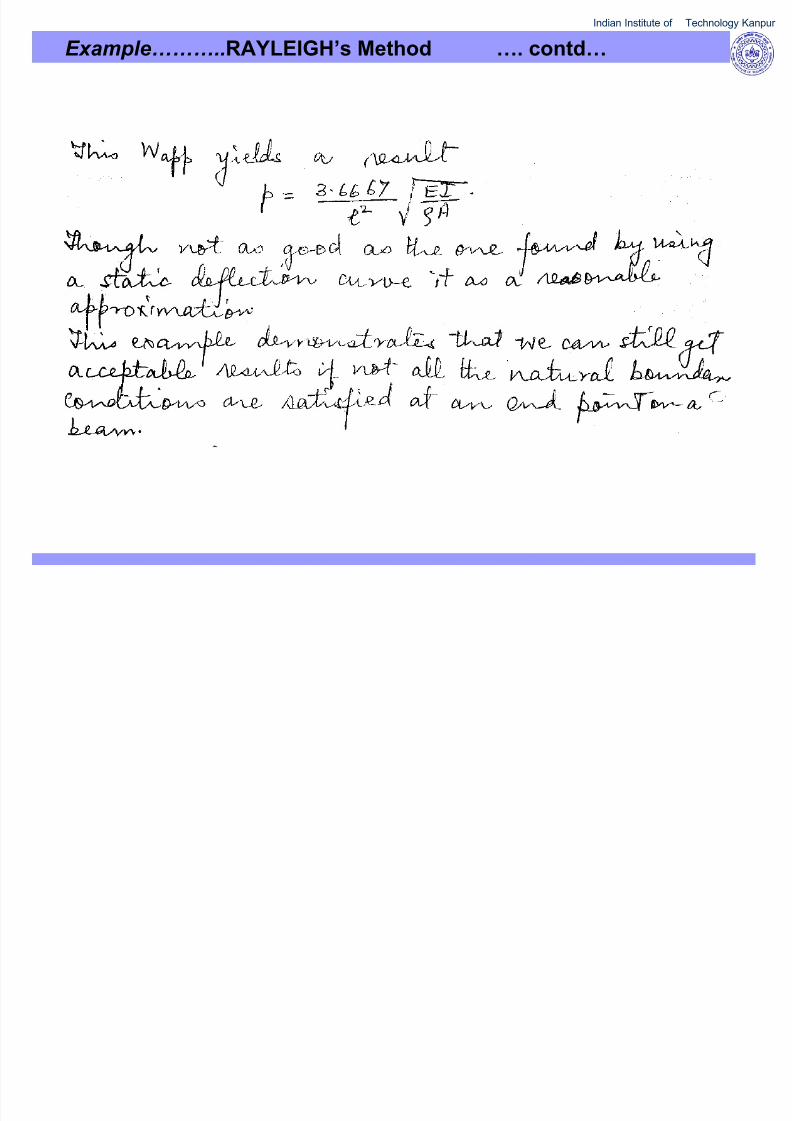
Example………..RAYLEIGH’s Method …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 128/283
Indian Institute of Technology Kanpur
Example………..RAYLEIGH’s Method …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 129/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 130/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 131/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 132/283
Indian Institute of Technology Kanpur
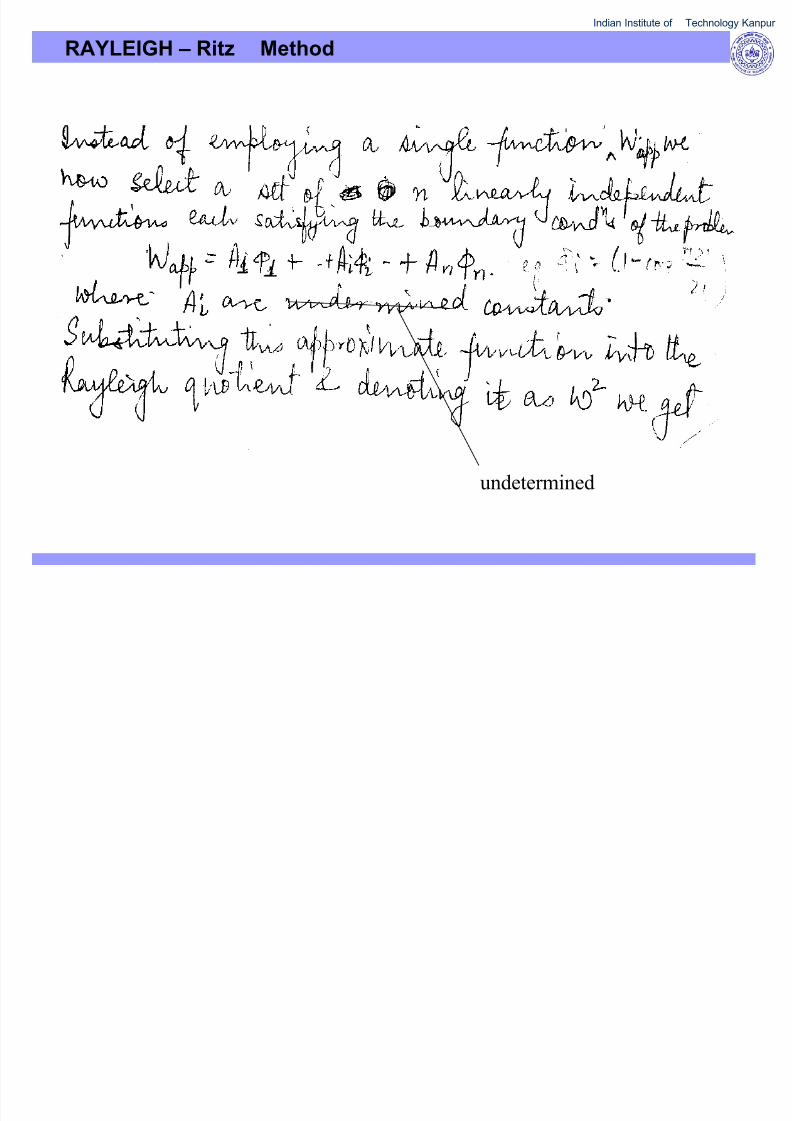
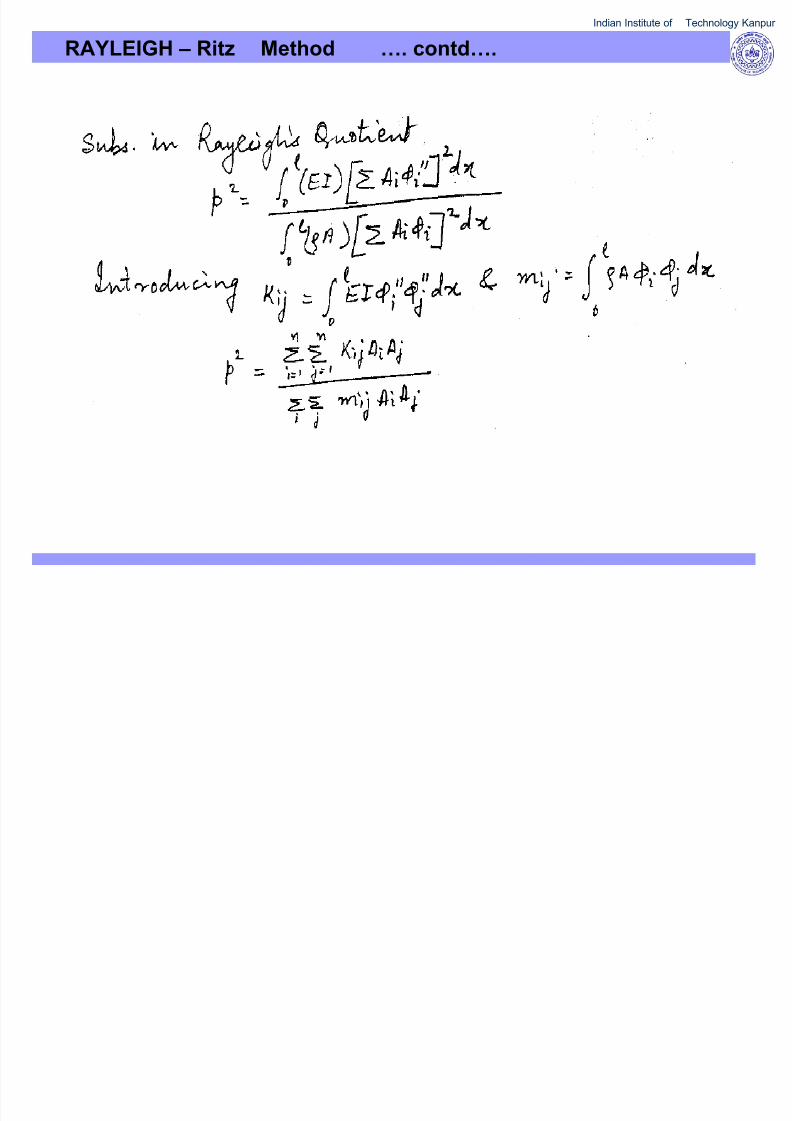
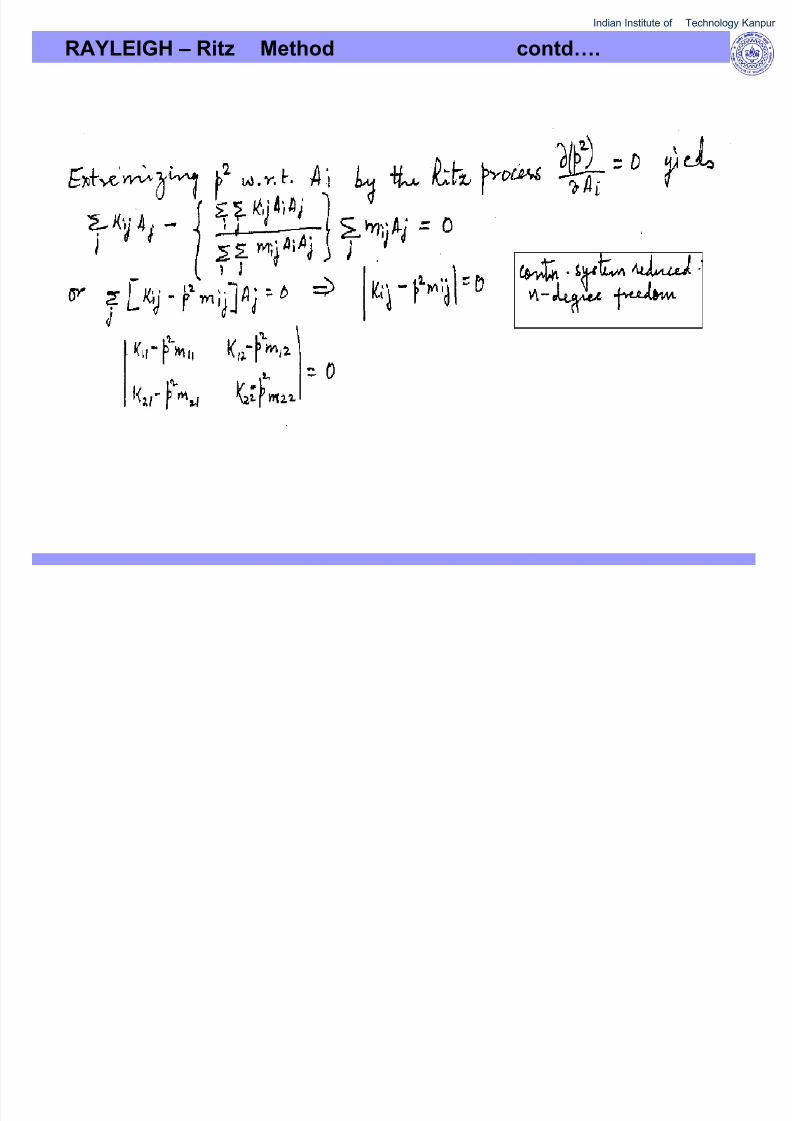
RAYLEIGH – Ritz Method contd….
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 133/283
Indian Institute of Technology Kanpur
Example………..RAYLEIGH – RITZ Method

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 134/283
Indian Institute of Technology Kanpur
Example………..RAYLEIGH – RITZ Method …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 135/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 136/283
Indian Institute of Technology Kanpur
GALERKIN Method

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 137/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 138/283
Indian Institute of Technology Kanpur
GALERKIN Method …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 139/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 140/283
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 141/283
Lecture 5
Stability Considerations

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 142/283
Indian Institute of Technology Kanpur
STABILITY Considerations Phase-Plane

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 143/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 144/283
Indian Institute of Technology Kanpur
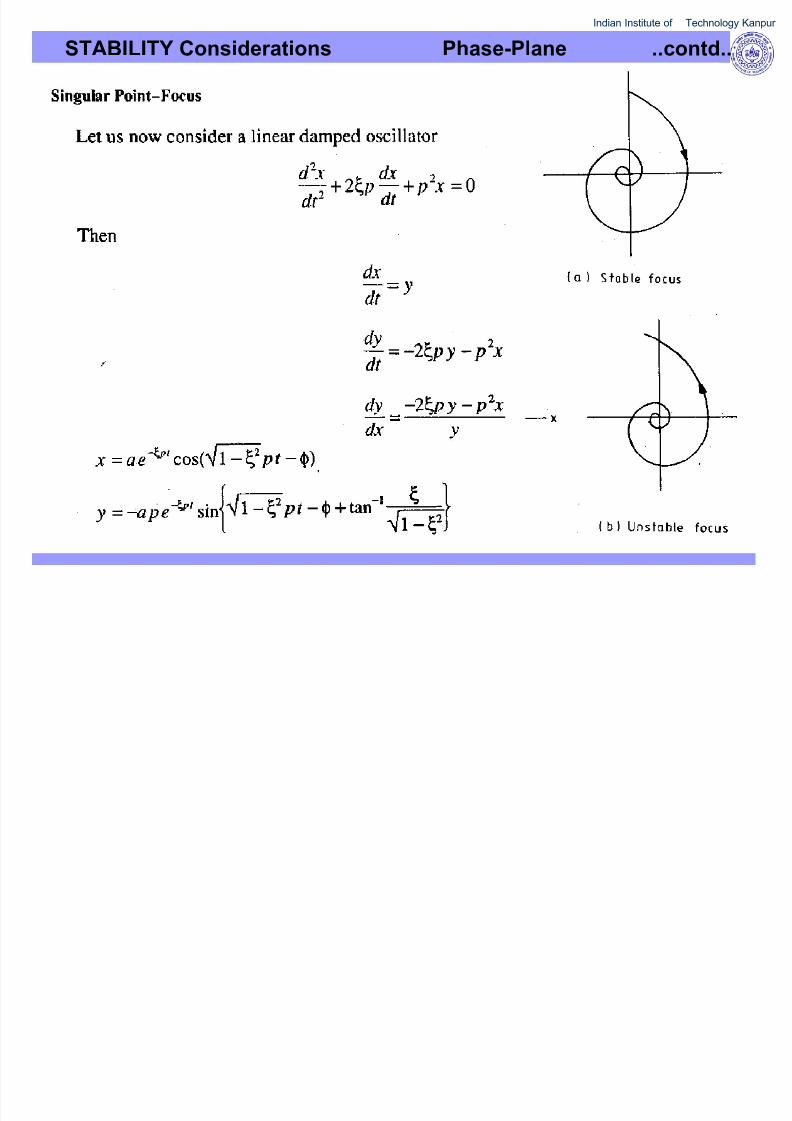
STABILITY Considerations Phase-Plane ..contd..
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 145/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 146/283
Indian Institute of Technology Kanpur
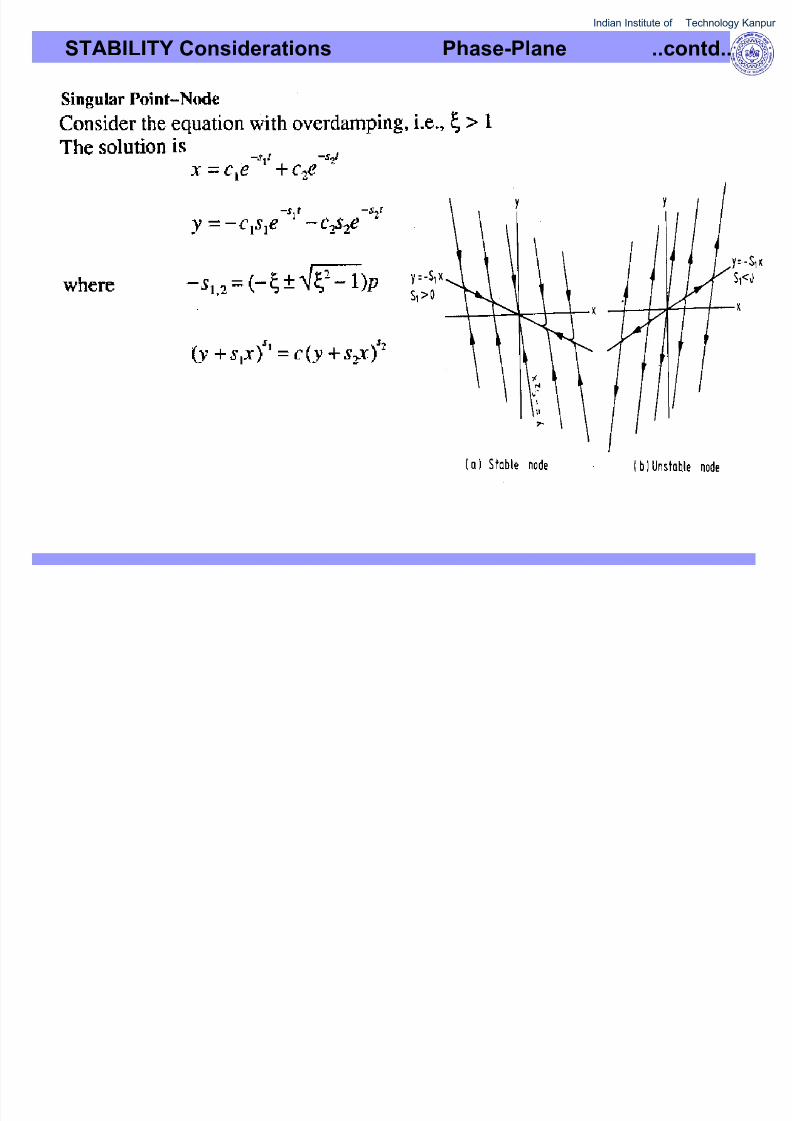
STABILITY Considerations Phase-Plane ..contd..

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 147/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 148/283
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 149/283
Lecture 6
FINITE ELEMENT FORMULATION
&
COMPONENT MODE SYNTHESIS
Indian Institute of Technology Kanpur
Finite Element Formulation – Axial Vibration of Beams

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 150/283
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 151/283
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 152/283
Reference Systems

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 153/283
Indian Institute of Technology Kanpur
Example

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 154/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 155/283
Indian Institute of Technology Kanpur
Guyan Reduction Scheme

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 156/283
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 157/283
Indian Institute of Technology Kanpur
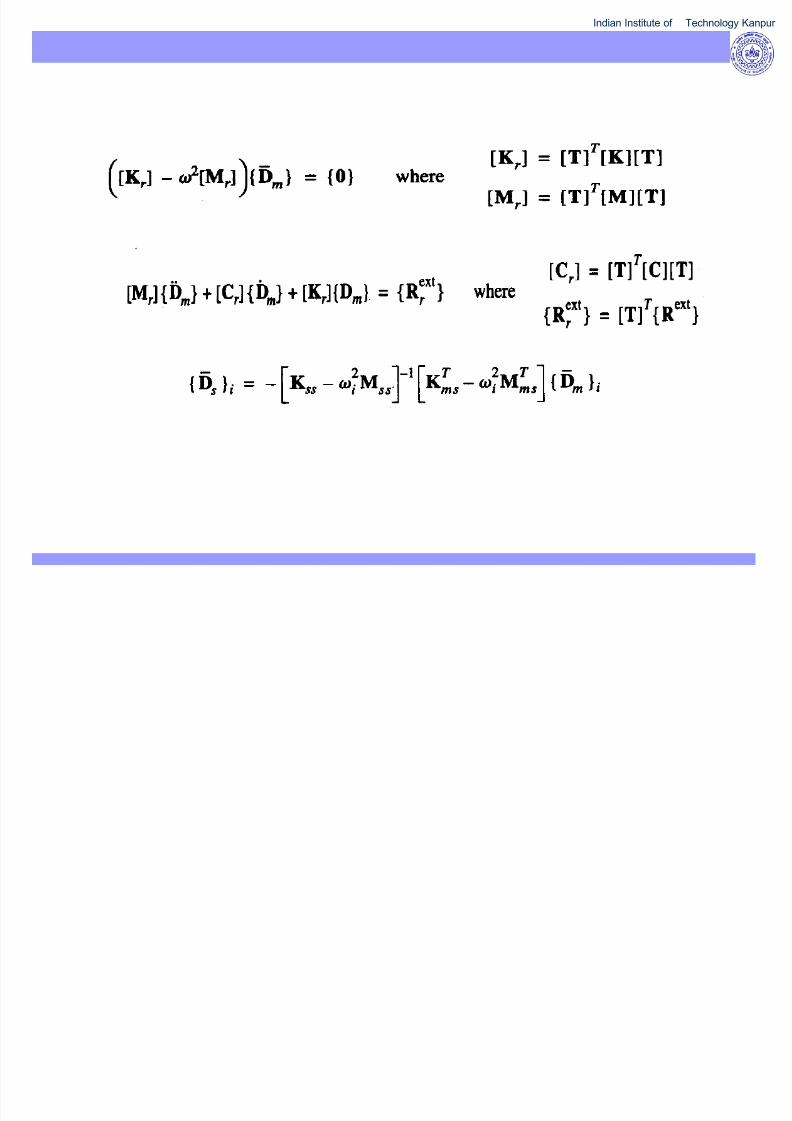
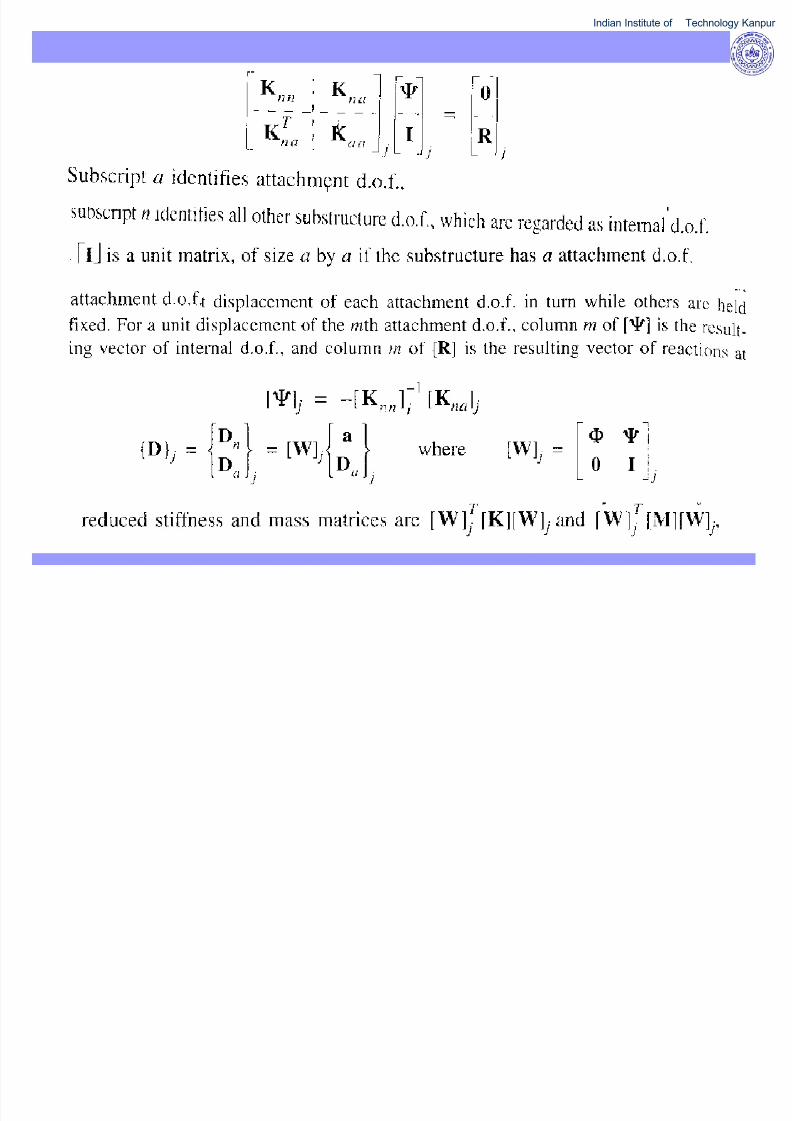
Component Mode Synthesis

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 158/283
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 159/283
Indian Institute of Technology Kanpur
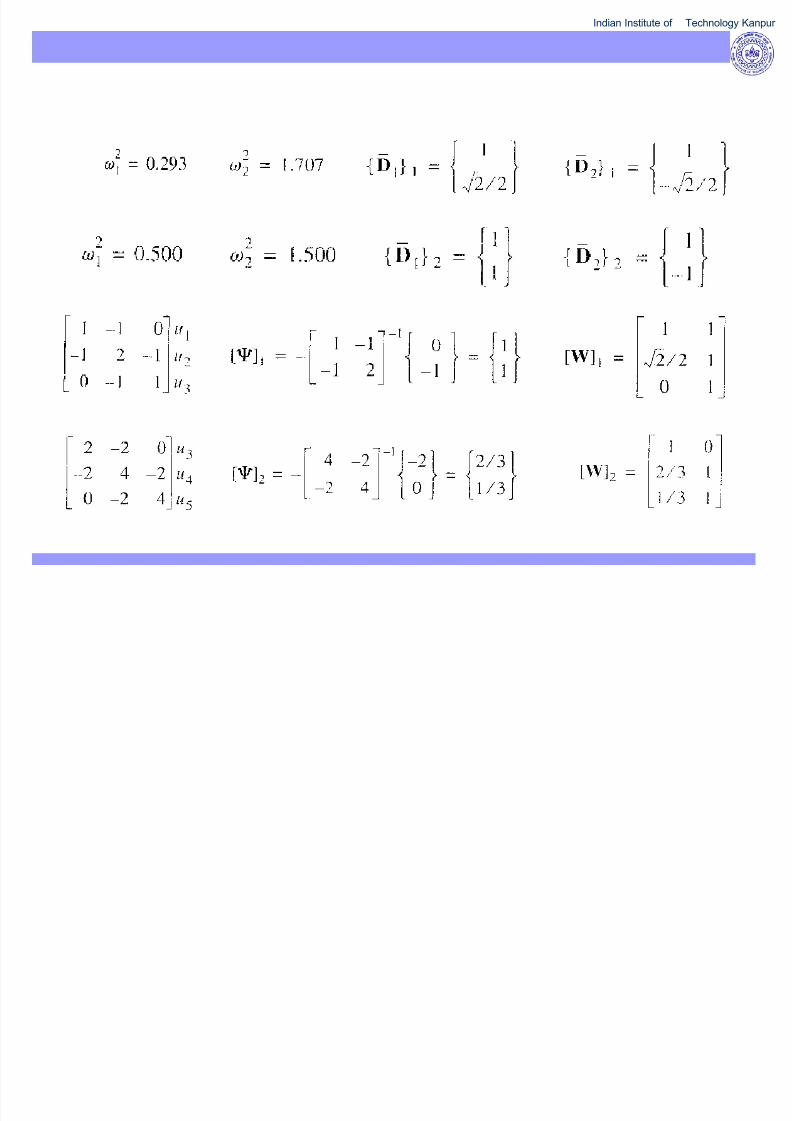
Example

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 160/283
Indian Institute of Technology Kanpur
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 161/283
Indian Institute of Technology Kanpur
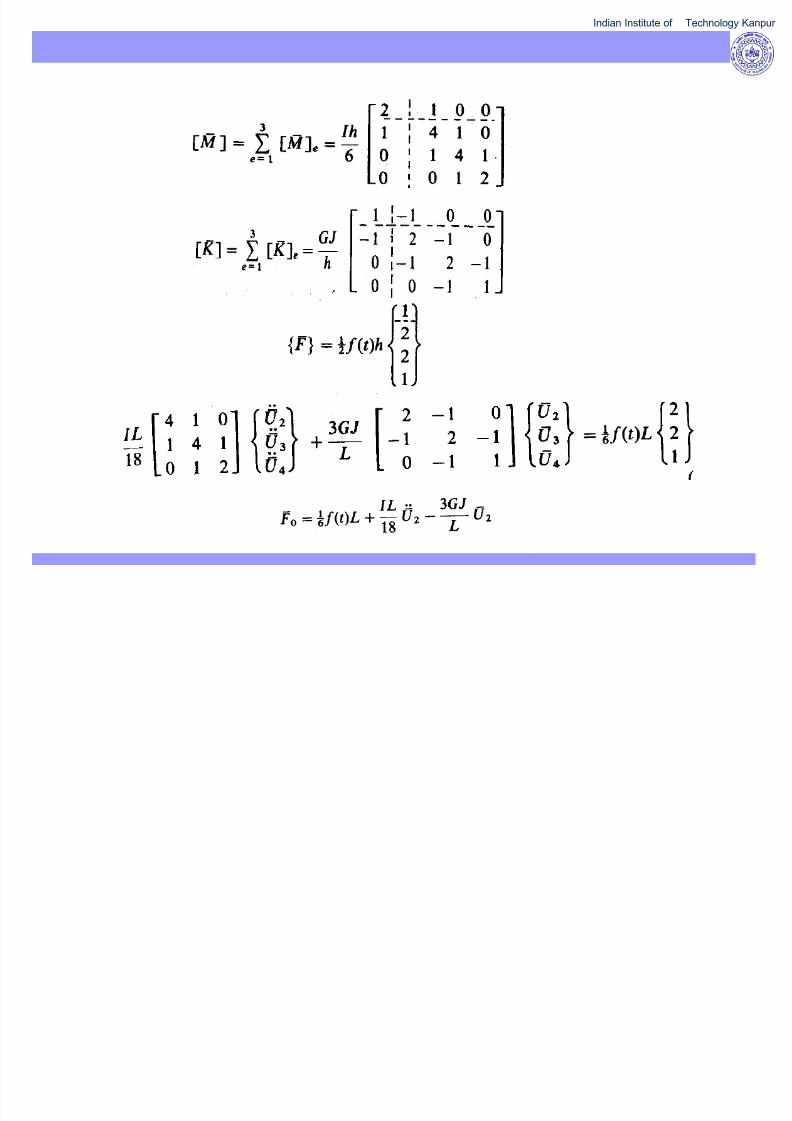
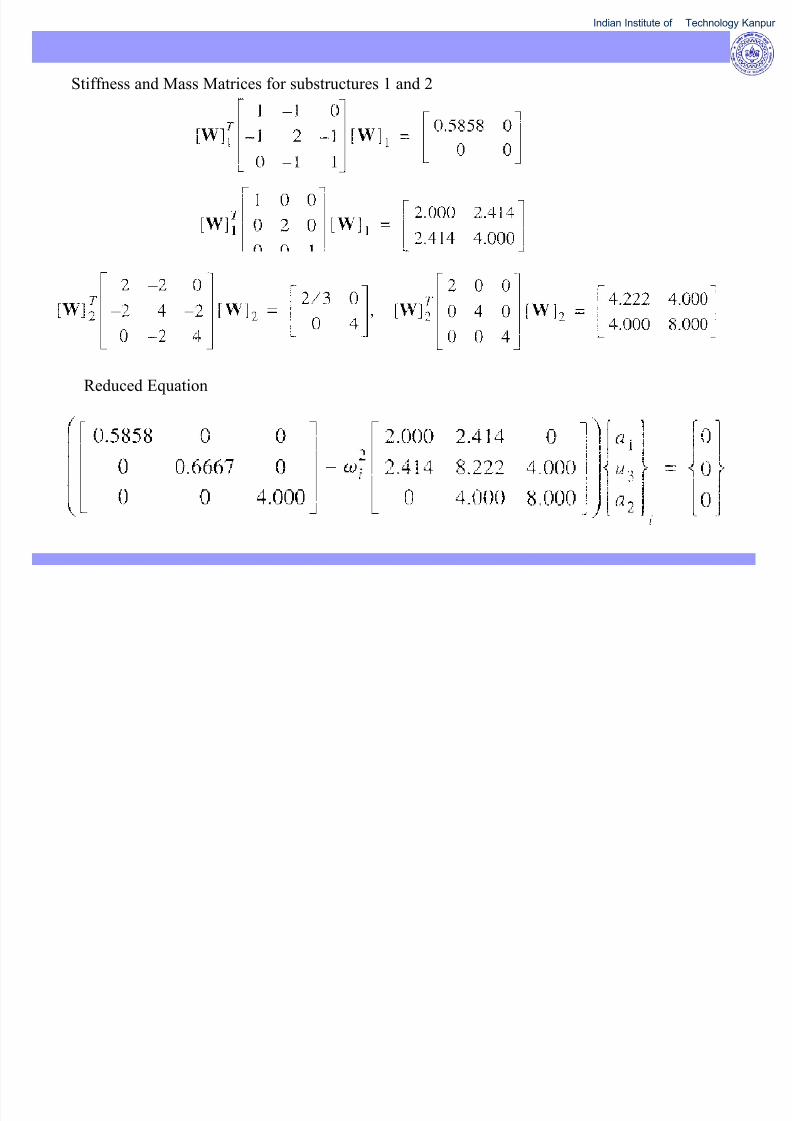
Stiffness and Mass Matrices for substructures 1 and 2
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 162/283
Reduced Equation
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 163/283
Lecture 7
Rotor Dynamics
Indian Institute of Technology Kanpur
Rotor Dynamics is different from Structural
Rotor Dynamics

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 164/283
Dynamics, as we deal with a rotatingstructure. Basically, all the vibration
phenomena will be valid, however, there are
several differences and we have to set up
procedures on handling the rotors and their
vibratory phenomena.
• Rankine is attributed to have mentioned theexistence of a critical speed of a rotor in
1869. He defined this as a limit of speed for
centrifugal whirling.
• There were many doubts whether a rotor can
cross such a critical speed? It was presumed
that it will be unstable after crossing thecritical speed. This is somewhat similar to
Speed of sound and whether one can cross
this barrier in flying.
• We have to wait for nearly 50 years to have
a clear understanding on this topic.
William John Macquorn Rankine (1820-1872)

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 165/283
Indian Institute of Technology Kanpur
Jeffcott’s fundamental contribution

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 166/283
• Jeffcott in 1919 treated the problem asforced vibration and identified the basic
principles of rotor dynamics. He showed
that the shaft did not rotate about rest
position but about its own center line, which
is spinning. The spinning rotor whirled
about the mean bearing center line.
• He identified the unbalance in the system
to be the driving force setting the whirl in
forced vibration. He derived simple
differential equations of the system and
solved them.• Jeffcott through this model has shown that
one can cross the critical speed without any
instability.
• In English speaking countries, a rotor
such as the one shown is named after Jeffcott, though in Germany, Scandinavia,
Holland, they prefer to call it as Laval rotor,
because, it was Laval who derived the
expression in the previous page.
• In this model, the shaft is assumed mass less and
the disk to be rigid. The total mass M of the rotor is
put as disk and the stiffness K is represented asshaft. The eccentricity is denoted by EG = a. The
rotor spins about its own axis with an angular velocity
w and whirls with angular velocity n. Jeffcott
considered synchronous whirl, i.e., n=w.

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 167/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 168/283
Indian Institute of Technology Kanpur
Translatory and Conical Whirl

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 169/283
•Rigid rotor on flexible bearings is same as
a flexible rotor on rigid bearings - however it provides for translatory and conical whirl
modes. The first flexure of the rotor comes
after these whirls.
Indian Institute of Technology Kanpur
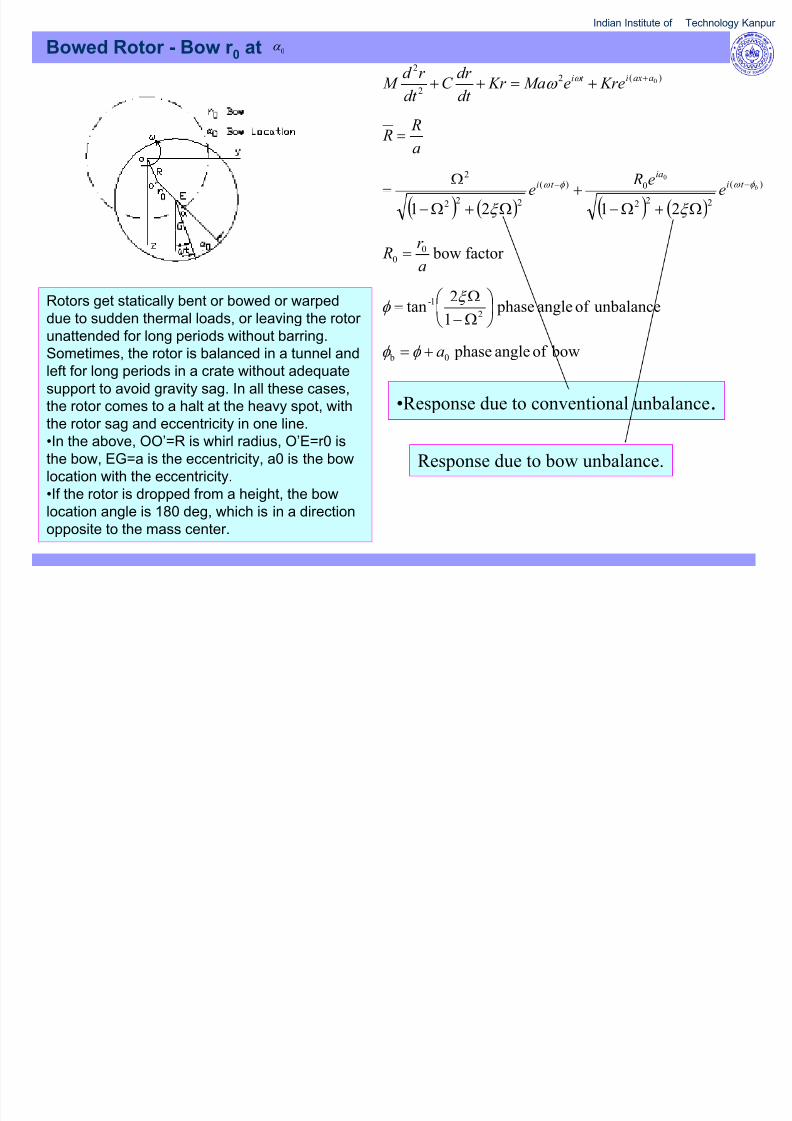
Bowed Rotor - Bow r 0 at
)(2
2
2
0KreeMaKr dt
dr C
dt
r d M
aaxit i +=++ +ω ω
0α
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 170/283
Rotors get statically bent or bowed or warped
due to sudden thermal loads, or leaving the rotor unattended for long periods without barring.
Sometimes, the rotor is balanced in a tunnel and
left for long periods in a crate without adequate
support to avoid gravity sag. In all these cases,
the rotor comes to a halt at the heavy spot, with
the rotor sag and eccentricity in one line.•In the above, OO’=R is whirl radius, O’E=r0 is
the bow, EG=a is the eccentricity, a0 is the bow
location with the eccentricity.
•If the rotor is dropped from a height, the bow
location angle is 180 deg, which is in a directionopposite to the mass center.
( )( )
( )( )
bow of angle phase
unbalance of angle phase1
2tan
factor bow
2121
0b
2
1-
00
)(
222
0)(
222
2 0
a
a
r R
eeR
e
a
RR
bt iia
t i
+=
Ω−
Ω=
=
Ω+Ω−+
Ω+Ω−
Ω=
=
−−
φ φ
ξ φ
ξ ξ
φ ω φ ω
Response due to bow unbalance.
•Response due to conventional unbalance.
Indian Institute of Technology Kanpur
Response - Self Balancing Speed
( )[ ]+= +−− t iaii eBeAeR ω φ φ 0 0
0 0
a =

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 171/283
•A is response due to conventional unbalance and
B due to the bow unbalance.
•Usually, the bow gives a0 = 0, then these two
responses get added, i.e., the unbalance increases.•For a dropped rotor the bow usually is a0 = 180,
then these two responses oppose.
•The above condition leads to a self balancing
speed, Ws, speed at which the response becomes
zero.
[ ] ( )
( ) ( )
( ) ( )
++=
Ω+Ω−=
Ω+Ω−Ω=
+=
−
−−
b
b
t iia
BABA
RB
A
eBeA
φ φ φ φ ψ
ξ
ξ
ψ ω
coscossinsintan
21
21
1
222
0
222
2
0
( ) ( )
( ) ( )
0
222
0
2
0
0
222
0
2
21
180
21
R
R
a
RR
a
R
a
RR
s=Ω
Ω+Ω−
−Ω==
=
Ω+Ω−
+Ω==
ξ
ξ

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 172/283
Indian Institute of Technology Kanpur
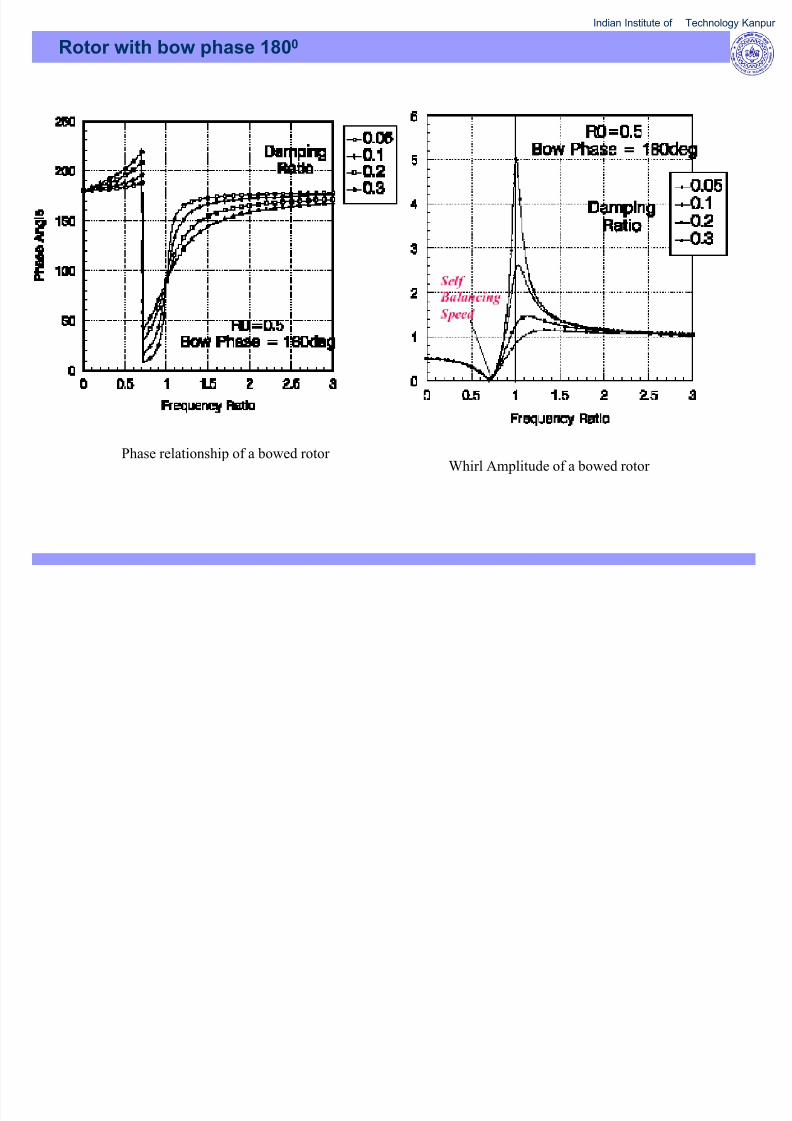
Rotor with bow phase 1800
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 173/283
Phase relationship of a bowed rotor Whirl Amplitude of a bowed rotor
Indian Institute of Technology Kanpur
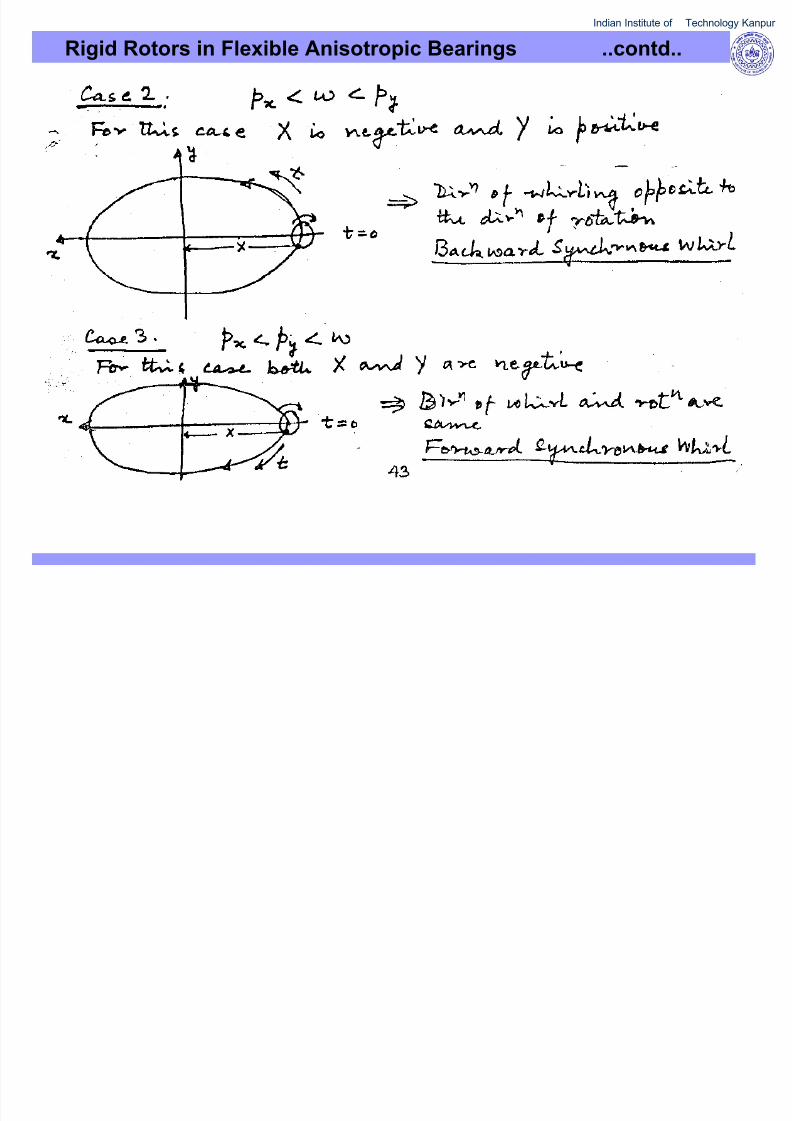
Rigid Rotors in Flexible Anisotropic Bearings

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 174/283
Indian Institute of Technology Kanpur
Rigid Rotors in Flexible Anisotropic Bearings ..contd..

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 175/283
Indian Institute of Technology Kanpur
Rigid Rotors in Flexible Anisotropic Bearings ..contd..

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 176/283
Indian Institute of Technology Kanpur
Rigid Rotors in Flexible Anisotropic Bearings ..contd..
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 177/283
Indian Institute of Technology Kanpur
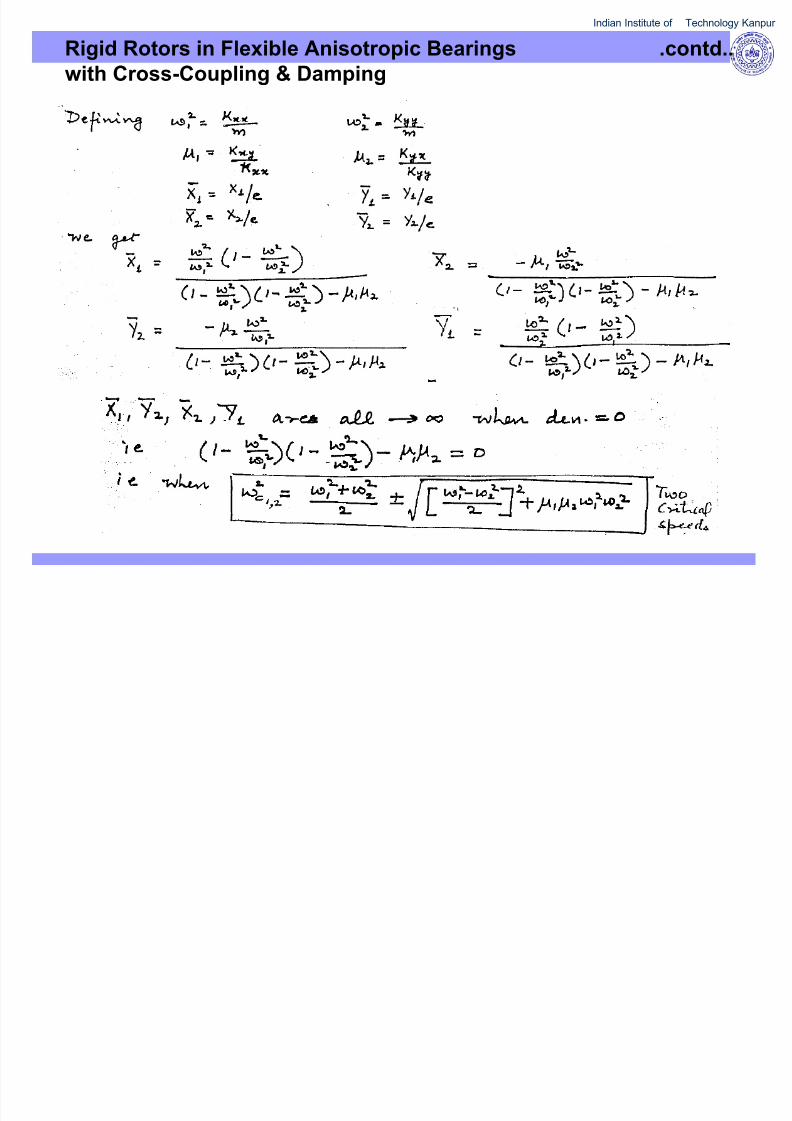
Rigid Rotors in Flexible Anisotropic Bearings
with Cross-Coupling & Damping

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 178/283
Indian Institute of Technology Kanpur
Rigid Rotors in Flexible Anisotropic Bearings .contd..
with Cross-Coupling & Damping

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 179/283
Indian Institute of Technology Kanpur
Rigid Rotors in Flexible Anisotropic Bearings .contd..
with Cross-Coupling & Damping
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 180/283
Indian Institute of Technology Kanpur
.contd..

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 181/283
Indian Institute of Technology Kanpur
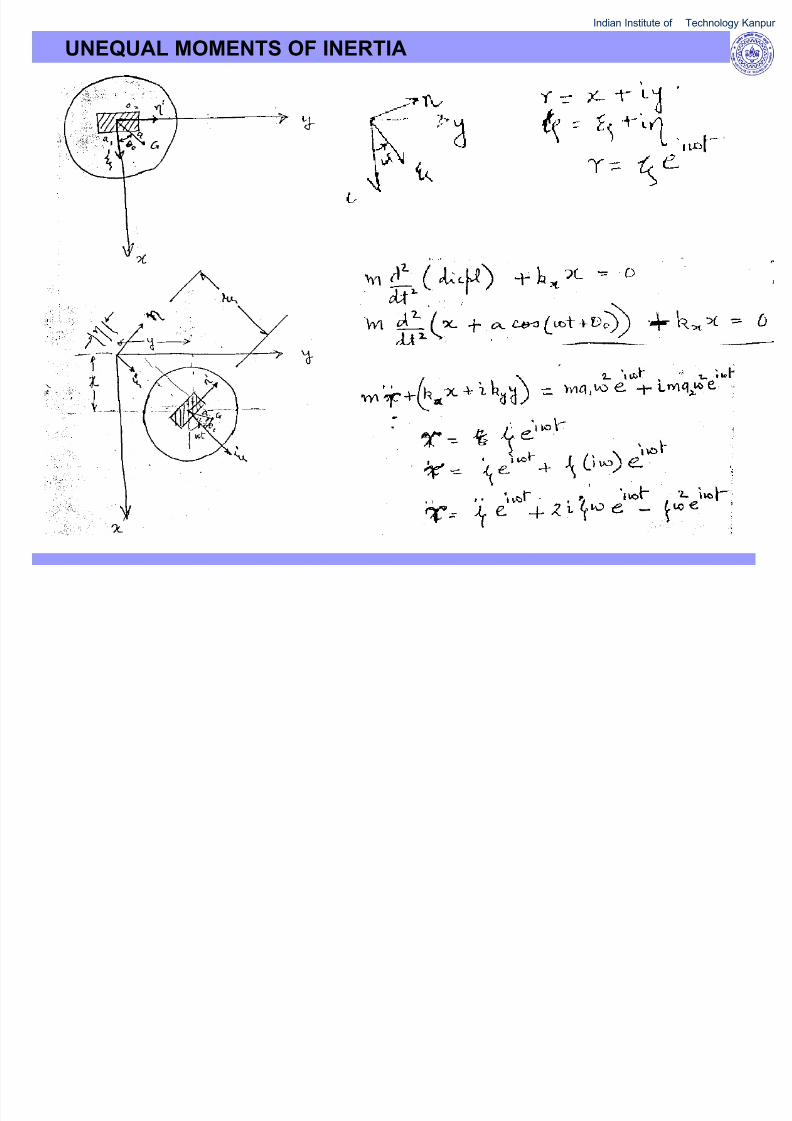
UNEQUAL MOMENTS OF INERTIA
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 182/283
Indian Institute of Technology Kanpur
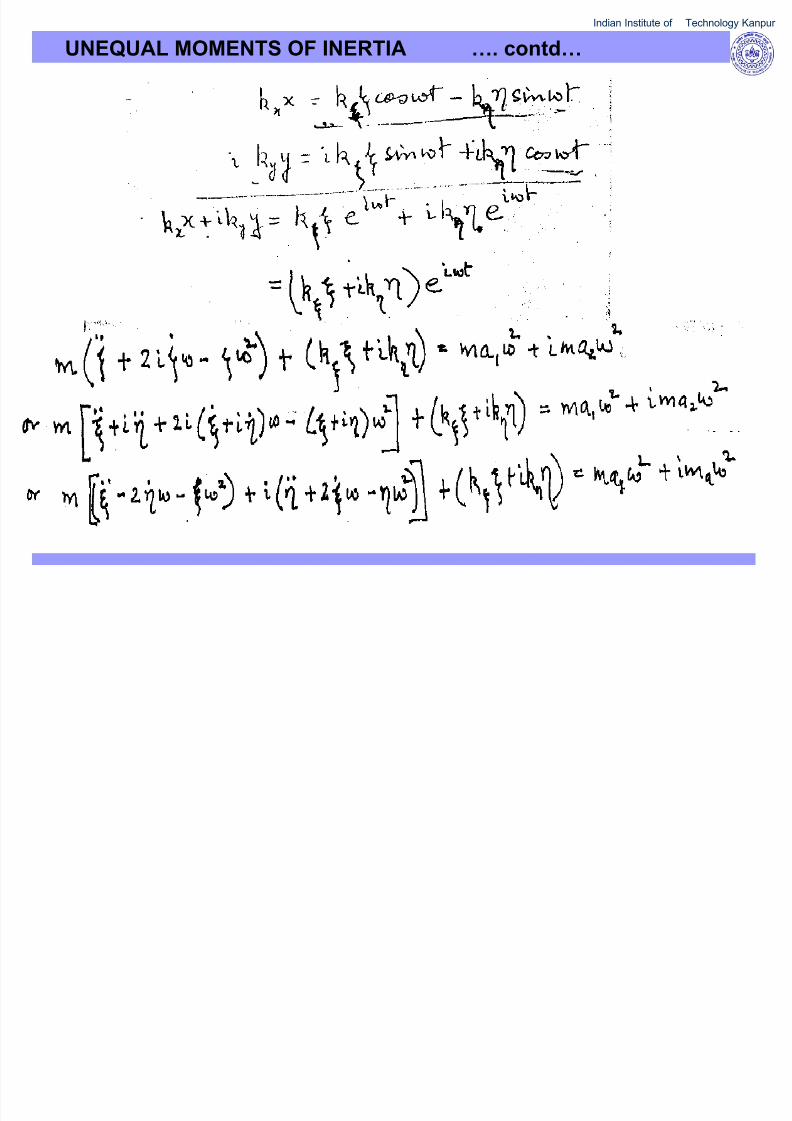
UNEQUAL MOMENTS OF INERTIA …. contd…
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 183/283
Indian Institute of Technology Kanpur
UNEQUAL MOMENTS OF INERTIA …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 184/283
Indian Institute of Technology Kanpur
UNEQUAL MOMENTS OF INERTIA …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 185/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 186/283
Indian Institute of Technology Kanpur
Instability in Torsional Systems

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 187/283
Indian Institute of Technology Kanpur
Instability in Torsional Systems …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 188/283
Indian Institute of Technology Kanpur
Hill’s Equation; Mathieu‘s Equation

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 189/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 190/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 191/283
Indian Institute of Technology Kanpur
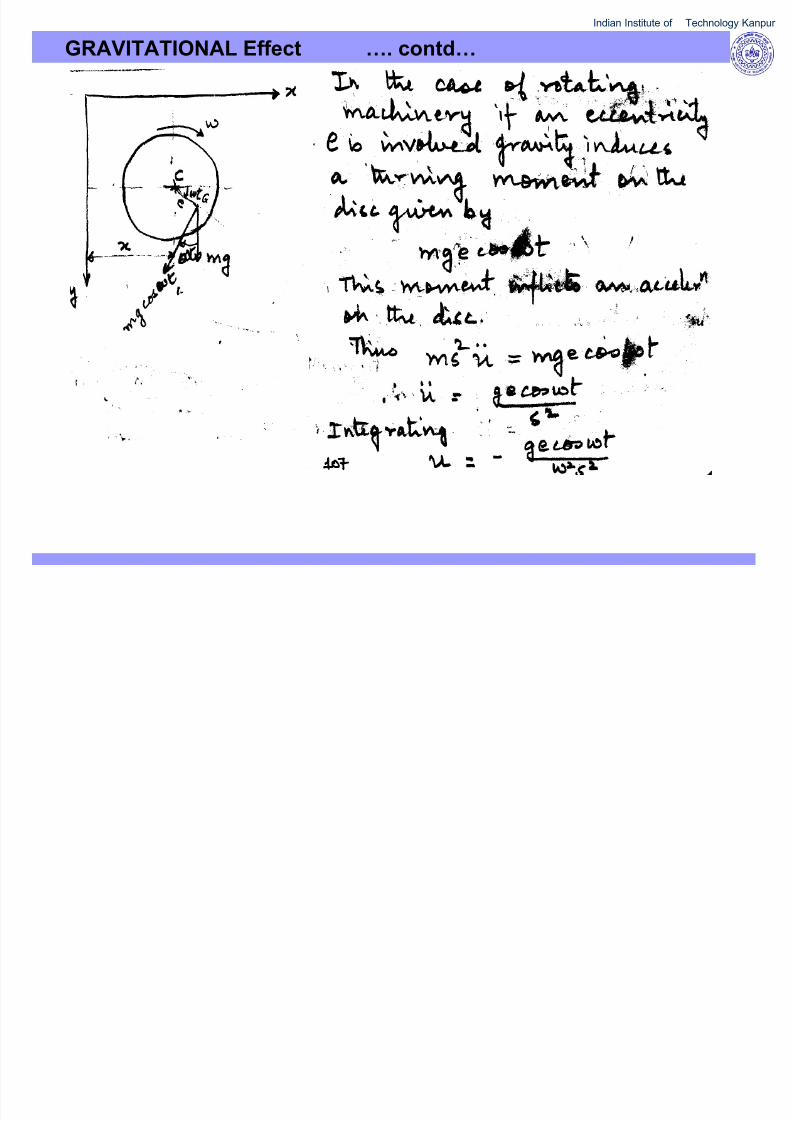
GRAVITATIONAL Effect …. contd…
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 192/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 193/283
Indian Institute of Technology Kanpur
GRAVITATIONAL Effect …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 194/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 195/283
Indian Institute of Technology Kanpur
OIL WHIRL

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 196/283
Indian Institute of Technology Kanpur
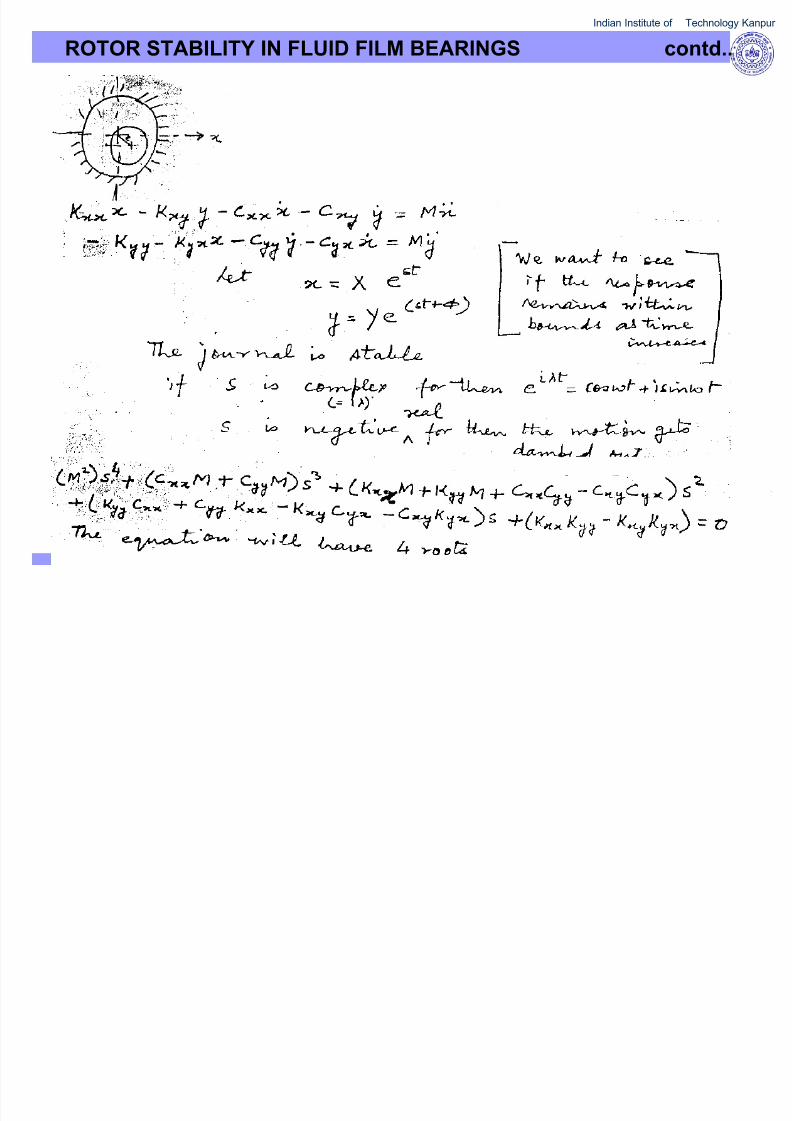
ROTOR STABILITY IN FLUID FILM BEARINGS contd..
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 197/283
Indian Institute of Technology Kanpur
ROUTH-HURWITZ CRITERION

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 198/283
Indian Institute of Technology Kanpur
ROUTH-HURWITZ CRITERION contd..

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 199/283
Indian Institute of Technology Kanpur
Example ROUTH-HURWITZ CRITERION

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 200/283
Indian Institute of Technology Kanpur
Example ROUTH-HURWITZ CRITERION …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 201/283
Indian Institute of Technology Kanpur
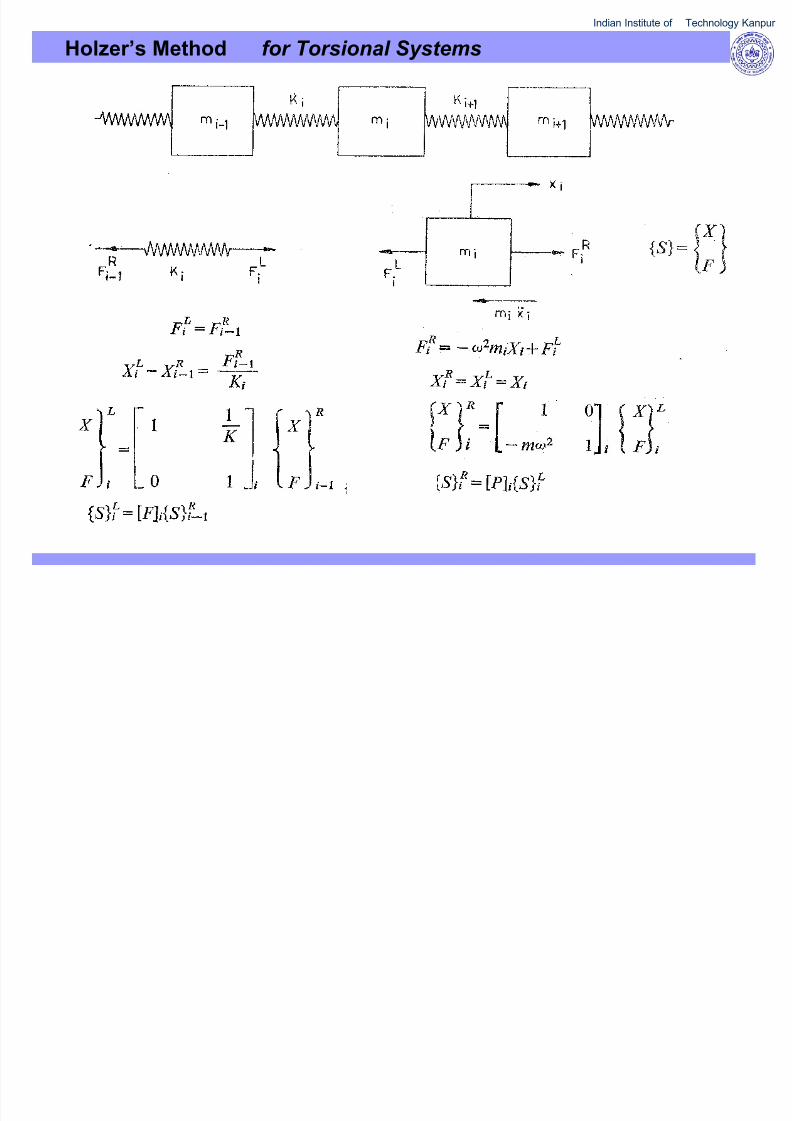
Holzer’s Method for Torsional Systems
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 202/283
Indian Institute of Technology Kanpur
Holzer’s Method for Torsional Systems …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 203/283
Indian Institute of Technology Kanpur
Holzer’s Method for Torsional Systems …. contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 204/283
Indian Institute of Technology Kanpur
Example …… Holzer’s Method

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 205/283
Indian Institute of Technology Kanpur
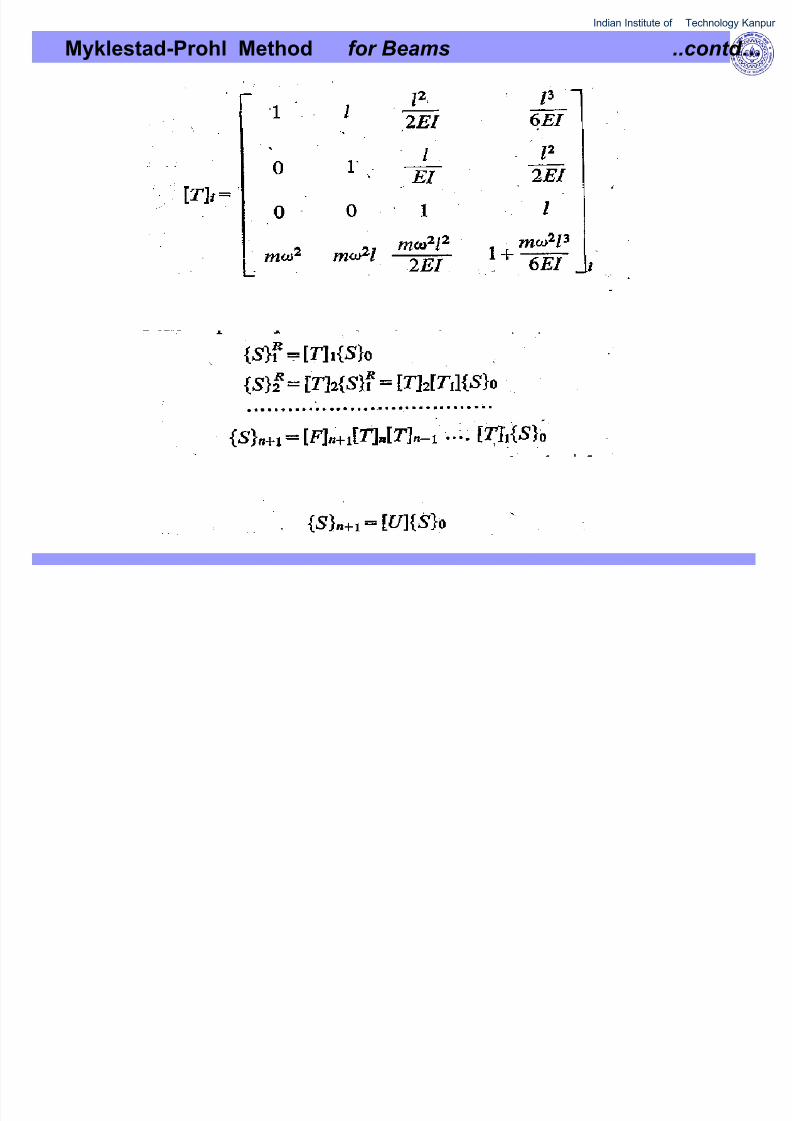
Myklestad-Prohl Method for Beams

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 206/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 207/283
Indian Institute of Technology Kanpur
Myklestad-Prohl Method for Beams ..contd…
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 208/283
Indian Institute of Technology Kanpur
Myklestad-Prohl Method for Beams ..contd…

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 209/283
Indian Institute of Technology Kanpur
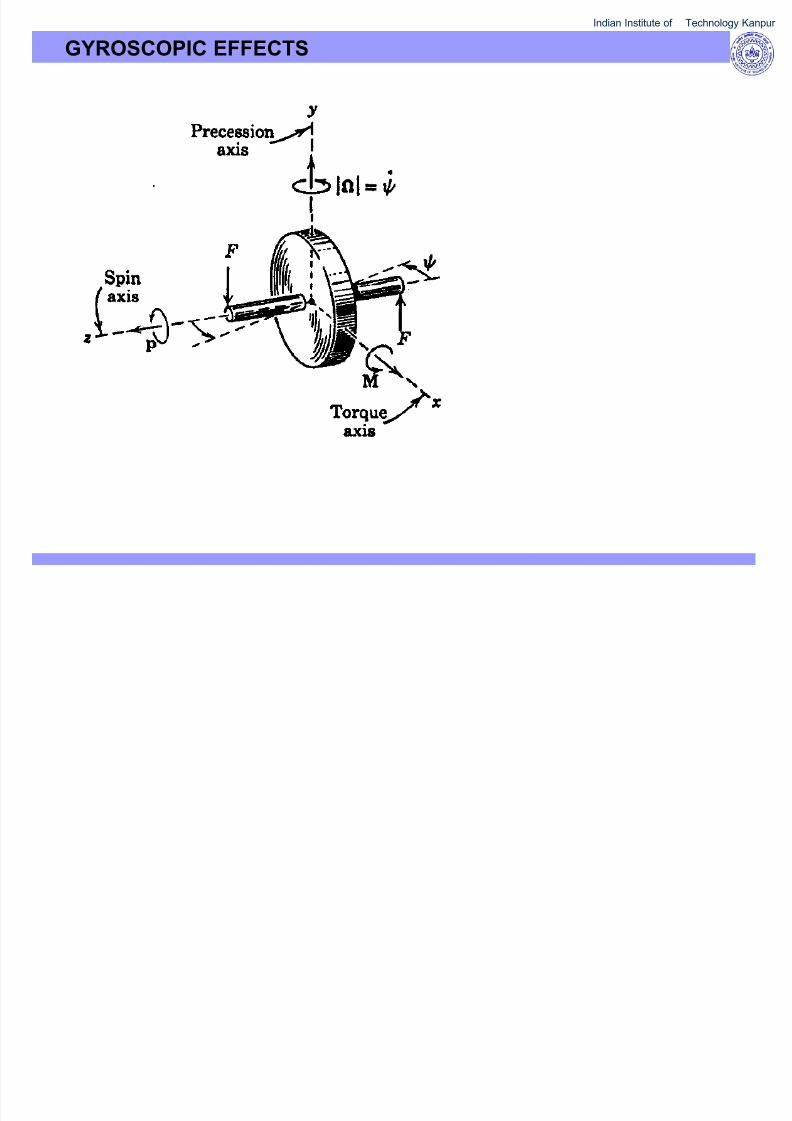
GYROSCOPIC EFFECTS
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 210/283
Indian Institute of Technology Kanpur
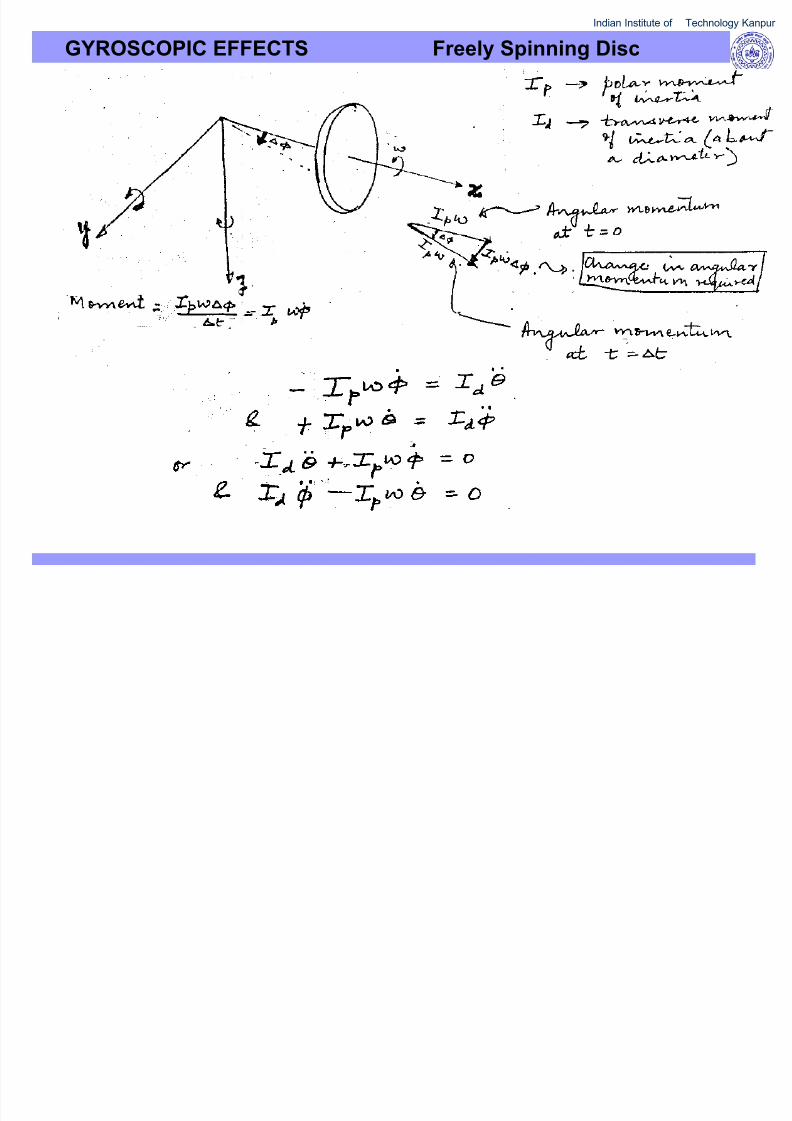
GYROSCOPIC EFFECTS Freely Spinning Disc
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 211/283
Indian Institute of Technology Kanpur
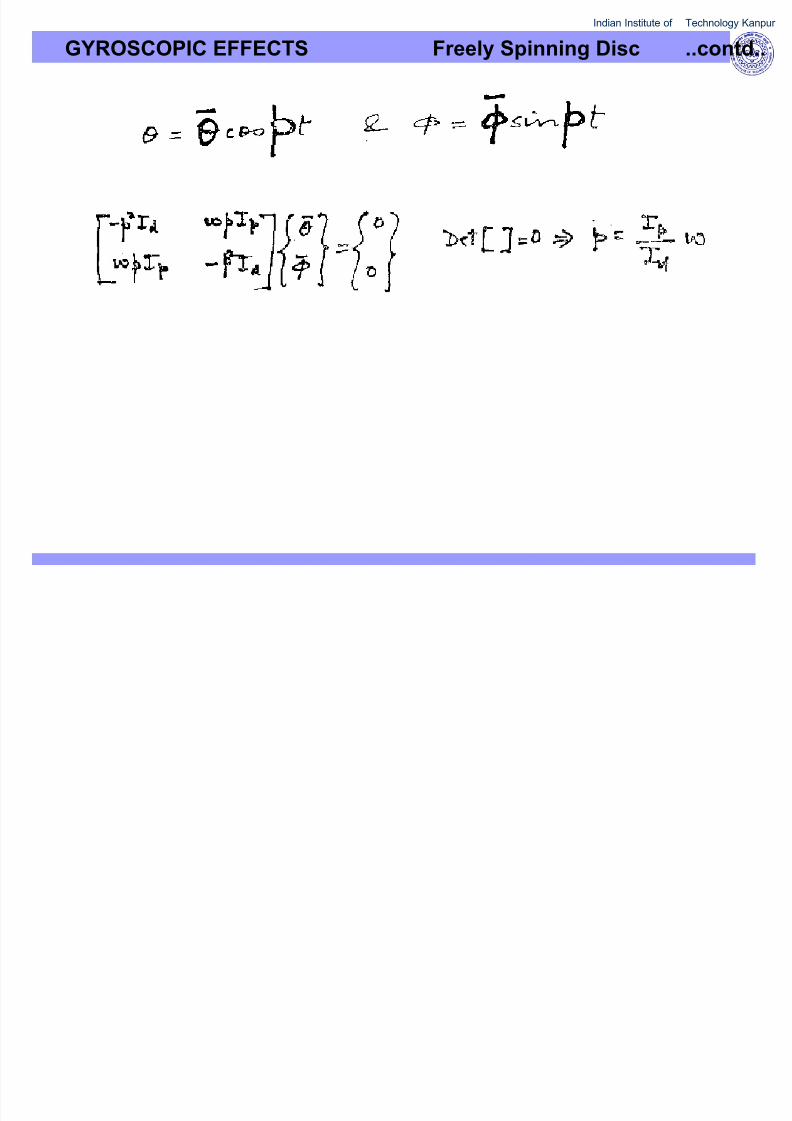
GYROSCOPIC EFFECTS Freely Spinning Disc ..contd..
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 212/283
Indian Institute of Technology Kanpur
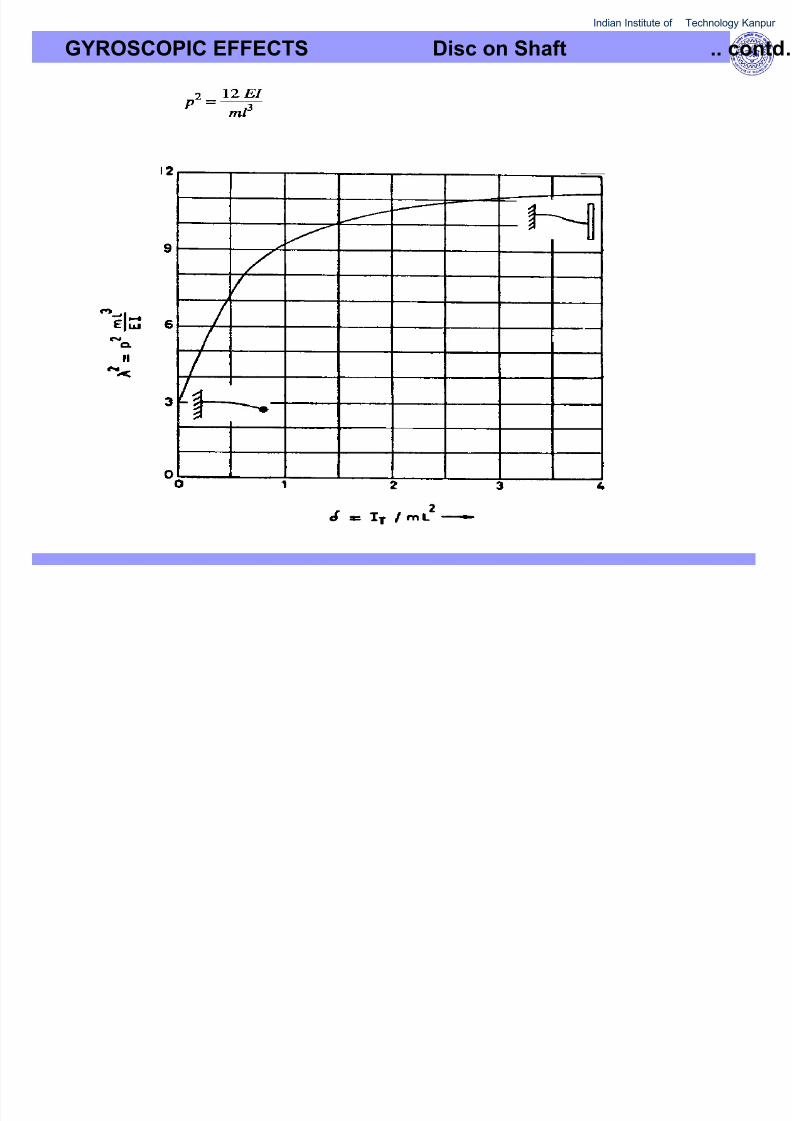
GYROSCOPIC EFFECTS Disc on Shaft

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 213/283
Additional term in place of 0
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 214/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 215/283
Indian Institute of Technology Kanpur
Dynamic Unbalance

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 216/283
Indian Institute of Technology Kanpur
Single Plane Balancing
•Balancing of single discs is a fairly simple task
as
all the unbalance can be considered as confinedto be in one plane.

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 217/283
p
•If you run the rotor with the residual unbalance
as it existed and which is to be corrected, a
vibration pickup on the bearing will sense a
response due to this unbalance. In order to relatethe vibration signal to the rotor, one can have a
phasor placed on the shaft, relative to which the
vibration signal is measured, that gives the
magnitude and phase angle of the response with
the residual unbalance. Let that be a vector Ov as
shown. Note the 0, 90, 180 and 270o positionstaken for the given rotation with 0 as the phasor
location.
•Though we know a phasor location marked on
the shaft, we have no idea where the unbalance
is, now we place a known mass at a known
location as per the chart and measure theresponse which is O+T. The effect of trial mass is
now given by (O+T) – Ov = Tv.
•The correction mass is therefore to be placed at
35o in the direction of rotation from the location of
trial mass, the magnitude is decided by thelengths of the vectors Tv and Ov.

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 218/283
Indian Institute of Technology Kanpur
Rigid Rotor – Two Plane Balancing
•Let Fi be the unbalance force in ith plane. Introduce
two equal and opposite forces Fi in plane L. Sincethe rotor is rigid these two equal and opposite forces
ff f

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 219/283
have no effect on the equilibrium of the system. We
have three forces now, two of them form a couple
ML as shown.
•Now split the couple into two equal and opposite
forces in the planes L and R separated by distance a.•In plane L we have now two forces, combine them
to form into one and let this be Fi L and let the force
in the right plane be denoted as Fi R.
•Repeat this to all the n disks and form a set of n
concurrent forces in each of the planes L and R.Find the resultants of these concurrent forces and
denote them FL and FR.
•Thus we reduced the original distributed unbalance
in the system to two unbalance forces in any two
convenient planes – remember this is valid only for
rigid rotors and a process of removing these twounbalance forces is called Two Plane Balancing or
Dynamic Balancing, in place of simple statics used
in Single Plane Balancing or Static Balancing.
Indian Institute of Technology Kanpur
Influence Coefficients
•As in single plane balancing fix the
angular locations and use a phasor to

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 220/283
angular locations and use a phasor to
measure the phase. Choose the
measurement planes to be, say left
bearing and right bearing. Let the
responses without any trial mass be asshown.
•Now introduce a trial mass in right plane
and let the responses be as denoted here.
•Similarly, let a trial mass in left plane
give the responses as shown here.
•Using these six responses, we derive the
influence coefficients, measures that tell us
how the responses will be arising out of known forces. The example in the
following pages illustrates how to achieve
the balancing of a rigid rotor.
Indian Institute of Technology Kanpur
Example
iL 144.9 90at microns 9.144:L PlaneLeft
MassTrialNo :1Run
1o =
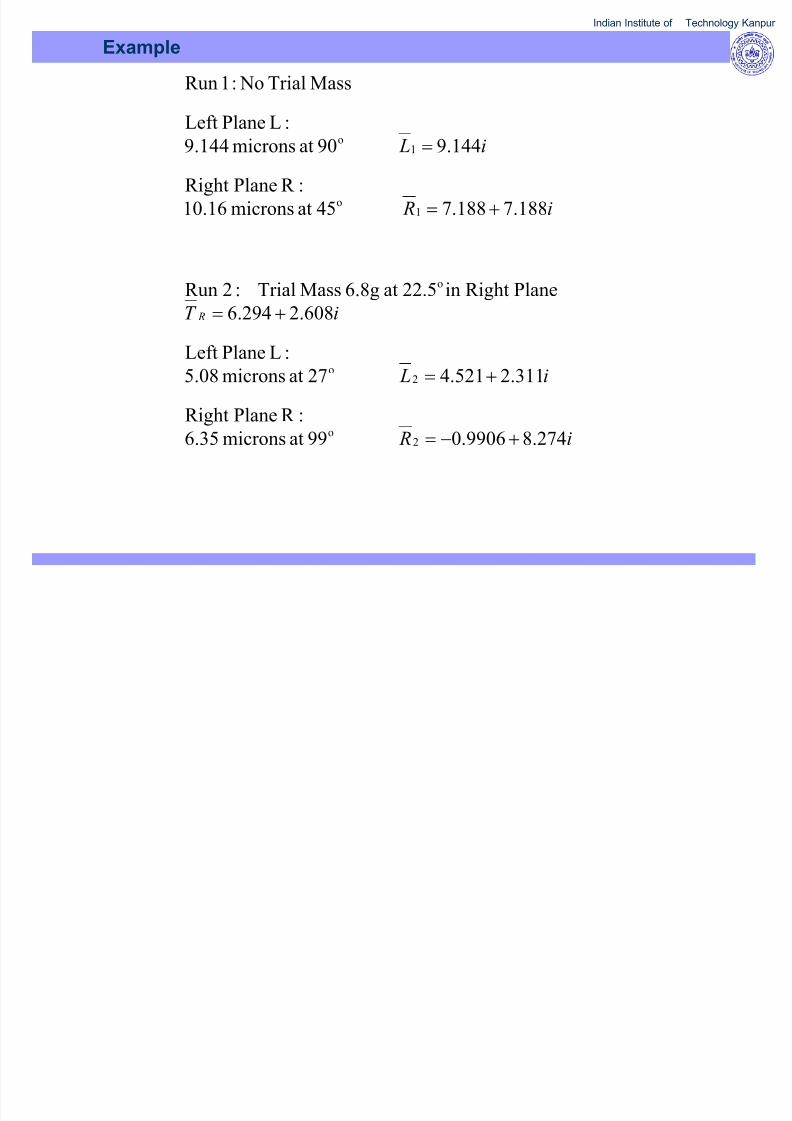
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 221/283
iR
iL
iT
iR
R
274.89906.0 99at microns 6.35 :R PlaneRight
311.2521.4 27at microns 5.08
:L PlaneLeft
608.2294.6
PlaneRightin22.5at 6.8g Mass Trial :2Run
188.7188.7 45at microns 10.16
:R PlaneRight
2o
2o
o
1o
+−=
+=
+=
+=
Indian Institute of Technology Kanpur
Example – contd.
T
RRa
RbR
12 −
=
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 222/283
•Influence coefficient denoting the
response in plane b due to a unit force in
plane R
•Influence coefficient denoting the
response in plane a due to a unit force in
plane R
( ) ( )
( ) ( )
i
i
ii
T
LLa
i
i
ii
R
aR
181.1229.0
608.2294.6
144.9311.2521.4
336.0160.1
608.2294.6
188.7188.7274.69906.0
12
+=
+
−+=
−=
+−=
+
+−+−=
Indian Institute of Technology Kanpur
Example – contd.
iT L 997.35.5
36at 6.8g :3 RunFinalo
+=
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 223/283
•Influence coefficient denoting the response in
plane b due to a unit force in plane L
•Influence coefficient denoting the response in
plane a due to a unit force in plane L
( ) ( )
i
i
ia
T
LLa
i
iiia
T
RRa
iR
iL
aL
L
aL
bL
L
bL
9.1327.0
997.35.5
144.94.9
76.3558.0
997.35.5188.7188.71.30775.4
1.30775.490at microns 30.5:R eRight Plan
04.9
0at microns 9.4:LLeft Plane
13
13
3
o
3
o
−=
+
−=
−=
+−=
+ +−+−=
−=
+−=
+=
Indian Institute of Technology Kanpur
Example – contd.
•We need to eliminate the original response vectors amamR bLLbRR1 +=

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 224/283
g p
by using correction masses in planes L and R, to
estimate these masses, we form the set of
equations given here using the influence
coefficients determined earlier.
•Solving the above two equations, we get
the expressions for correction masses.
•When these correction masses are added, (we may
have to do this in two masses each by placing them
in the nearest locations) the response theoreticallyshould be zero. This does not happen as there are
several assumptions made in this analysis, the first
correction should bring the responses to be low, one
or two additional balancing runs may be needed to
achieve the desired grade quality.
imim
aaaa
aLaRm
aaaa
aRaLm
amamL
amamR
L
R
bLaRaLbR
bRaRL
bLaRaLbR
aLbLR
aLLaRR
bLLbRR
9.181.2
56.194.10
11
11
1
1
−−=+=
−−=
−
−=
+=−
+=−
Indian Institute of Technology Kanpur
Shop Balancing set up

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 225/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 226/283
Indian Institute of Technology Kanpur
Influence Coefficients

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 227/283
Indian Institute of Technology Kanpur
Balancing Masses
vv 112 Planein MassTrial

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 228/283
[ ] vaU
T
vva
T
vva
T
vva
k iijk
ij
iij
ij
iii
1
1
th
11
1
21
2
Tests Speedk
...
j Planein MassTrial
−=
−=
−=
−=
Indian Institute of Technology Kanpur
Classification of Rotors
•Class 1 – Rigid Rotors: Rotors that can be corrected in any two arbitrary planes and after
correction, its unbalance does not significantly change at any speed upto the maximumoperating speed and when running under conditions which approximate closely to the final
supporting system Rotors which do not satisfy this condition are classified as flexible rotors

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 229/283
supporting system. Rotors which do not satisfy this condition are classified as flexible rotors.
•Class 2 – Quasi Flexible Rotors: Rotors that cannot be considered rigid but can be balanced
adequately in a low speed balancing machine. These are rotors, (1) where the axial distribution
of unbalance is known – e.g., 2A – shaft with a grinding wheel; 2B – Shaft with a grinding wheeland pulley; 2C – Jet engine compressor rotor; 2D – Printing roller; 2E – rotors with a long rigid
mass supported by a flexible shaft, whose unbalance can be neglected, such as computer
memory drum; (2) where axial distribution is not known – e.g., 2F – Symmetrical rotors with two
end correction planes, whose maximum speed does not significantly approach II critical speed
and whose service speed does not contain I critical speed and with controlled initial unbalance;
2G – same as 2F but with an additional central correction plane and that it may have its service
speed in I critical speed range; 2H – Same as 2F rotors but unsymmetrical.
•Class 3 – Flexible Rotors: Rotors that cannot be balanced in a low speed balancing machine
and that require some special flexible rotor balancing technique – e.g., Generator rotors•
Class 4 – Flexible Attachment Rotors: Rotors that could fall in categories 1 or 2 but have in
addition one or two more components that are themselves flexible or flexibly attached – e.g., a
rotor with centrifugal switch
•Class 5 – Single Speed Flexible Rotors: Rotors that could fall into category 3, but for some
reason, e.g., economy, are balanced only for one speed of operation – e.g., high speed motor
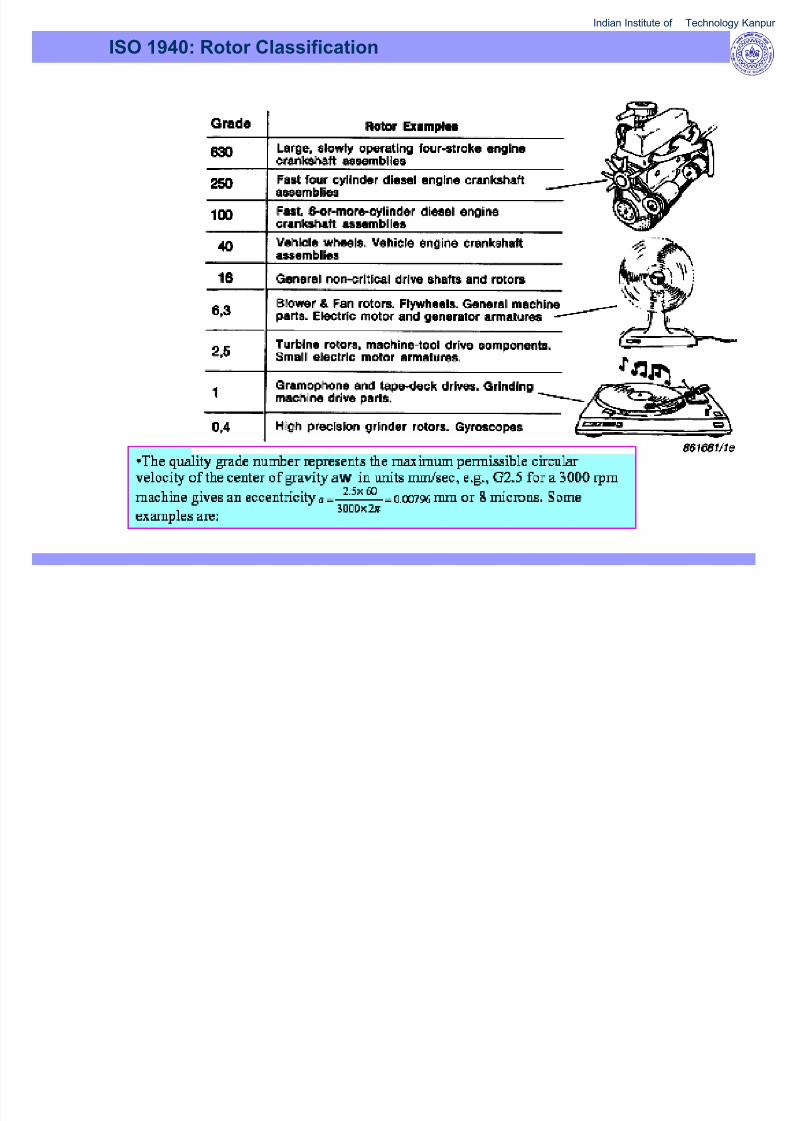
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 230/283

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 231/283
Indian Institute of Technology Kanpur
L-8

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 232/283
Vibration Measurement
Pickups, Analyzers, Modulation,
Cepstrum Analysis,
Digital Measurement
Indian Institute of Technology Kanpur
Why Vibration Measurements?
• We studied basic principles of structural vibrations, and special applications to rotors and their
behavior under dynamic conditions.
• While all this information and much more is basic to the understanding of machine behavior, thecurrent course is concerned primarily with the health of a machi ne. Every machine deteriorates in
condition however well it has been designed/ The rotating machinery is very expensive and they

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 233/283
condition, however well it has been designed/ The rotating machinery is very expensive and they
should be available for their operation for long uninterrupted intervals (years) and without any failures
and unexpected shut downs.
• Asset management is an important aspect to any heavy industry with rotating machinery. We find
several indications reflecting the condition of a machine in its life time; e.g., we know that an
automobile engine needs a change of lubricating oil as it becomes contaminated with dirt over a
period of time, so if we can find a measure of the state of the lubricating oil, an appropriate action can
be planned – or if one finds the bearing temperatures are going up, there is some rubbing and
inadequacy of lubricating oil, so on and so forth. Some of these measures, however, do not tell us the
problem in a machine sufficiently well in time for a proper asset management.• Over years of asset management by maintenance people, we know that the earliest indications of any
fault in a rotating machine are detected by an increase in vibration and sound levels, that is why every
asset management practice adopts vibration measurement as the first and foremost step that may be
further assisted by other measurements such as lub oil particle counting, bearing pressure and
temperature measurement, process parameter variations … Basically it is the vibration level, its
signature in time and frequency domains, orbits, and trends over short and long durations that help usin understanding the health of the machine and predicting any impending problem so that timely
action is taken. Therefore vibration measurement and its analysis is important first step in asset
management of rotating machinery.
Indian Institute of Technology Kanpur
Vibration Units of Measure
AMPLITUDE

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 234/283
Displacement in microns, mils, below 10 Hz
Is a measure of the distance the object moves
Velocity in mm/sec, inch/sec, between 10-1000 Hz
Is a measure of how fast it moves - (Speed) - most destructive
energy
Acceleration in mm/sec², Spike Energy - g above all
The force imparted on the vibration object as it changes its velocity.
TIME (FREQUENCY) Cycles / Sec, Hertz, RPM
PHASE Radian, Degree
Indian Institute of Technology Kanpur
Displacement, Velocity and Acceleration
• Displacement, velocity
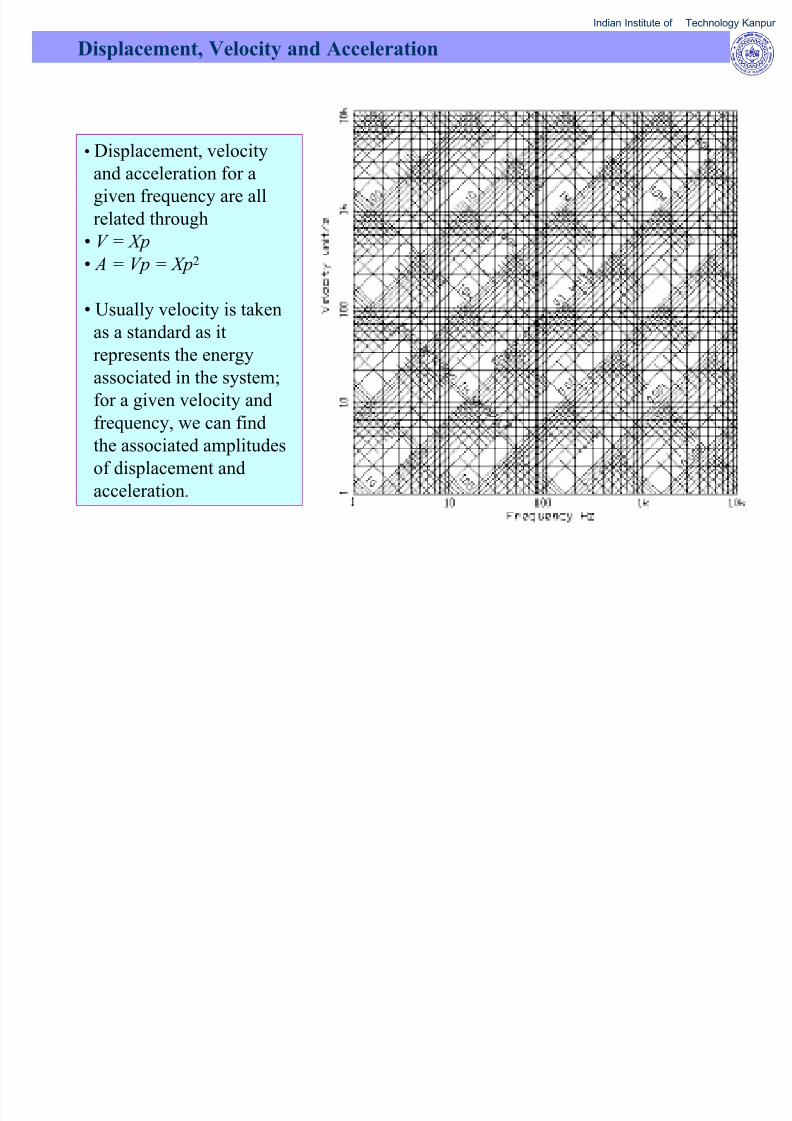
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 235/283
and acceleration for a
given frequency are all
related through• V = Xp
• A = Vp = Xp2
• Usually velocity is taken
as a standard as itrepresents the energy
associated in the system;
for a given velocity and
frequency, we can findthe associated amplitudes
of displacement and
acceleration.
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 236/283
Indian Institute of Technology Kanpur
Type of Measurement:
1) Contact (Seismic)
Transducers Selection

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 237/283
1) Contact (Seismic)
2) Non Non-Contact (Relative) Contact (Relative)
•Displacement: Eddy Current Proximity Pickup
•Velocity (Seismic): Electro Dynamic Transducer
•Acceleration: Piezoelectric Pickup
Direction & Location of Measurement: Direction & Location of Measurement:
• Horizontal, Vertical and Axial
• Bearing Pedestal, Shaft, Journal housing, Structure
Indian Institute of Technology Kanpur
• Measure Relative Distance Between Two Surfaces
• Accurate Low Frequency Response• Limited High Frequency Sensitivity
i l S
Eddy Probe – Velocity Transducer - Accelerometer
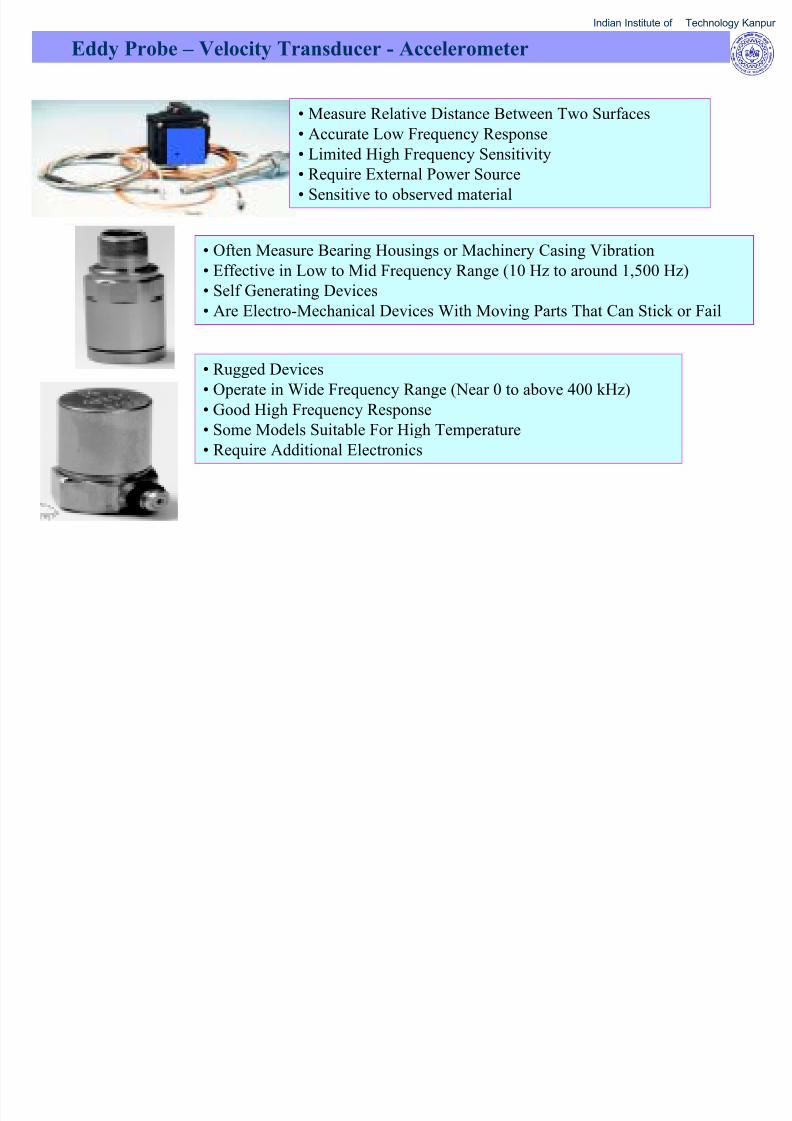
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 238/283
• Require External Power Source
• Sensitive to observed material
• Often Measure Bearing Housings or Machinery Casing Vibration
• Effective in Low to Mid Frequency Range (10 Hz to around 1,500 Hz)
• Self Generating Devices
• Are Electro-Mechanical Devices With Moving Parts That Can Stick or Fail
• Rugged Devices
• Operate in Wide Frequency Range (Near 0 to above 400 kHz)
• Good High Frequency Response
• Some Models Suitable For High Temperature• Require Additional Electronics
Indian Institute of Technology Kanpur
Sensor Relationships
Amplitude

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 239/283
• The adjoining figure gives the
displacement and acceleration for a
velocity of 0.628 in/sec
• At 1 Hz, displacement x = v/p, i.e.,
mils
• Corresponding acceleration at 1 Hz
is a = vp
• Common machinery operating
range is shown by the rectangular
area, displacement and acceleration
at any frequency can be obtained in
terms of 0.628 in/sec velocity
Amplitude
(mils, in/sec, g’s)
Indian Institute of Technology Kanpur
Vibration Sensor Principle

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 240/283
• A vibration sensor utilizes the basic single degree system response.
• The sensor when placed on a vibrating member experiences x(t) that is to to be measured
• The mass responds with absolute displacement y(t)
• Relative displacement z(t) = y(t) - x(t) and Z/X is shown above used as a measure of x(t)
• The sensor range and application is depends on how we proportion its mass and spring,
Indian Institute of Technology Kanpur
Seismometer / Velocity Transducer

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 241/283
• A Seismometer or Velocity Transducer measures rate of
change of relative displacement z(t) = y(t) - x(t) using
the electromagnetic principle through the induced
voltage as illustrated in right side, as a measure of x(t)• The sensor range for Z=X is r >> w/p, therefore p
should as low as possible, i.e., the mass is relatively
heavier to the spring stiffness, then we measure the
velocity of the support and hence Velocity Transducer.
• Electromagnetic Principle
Variation of Permeance of magnetic
circuit causes a change in the flux FX
V
dt
dx
dt
d n
dt
d nV
8
8
10
10
−
−
×−=
×−=
φ
φ
Indian Institute of Technology Kanpur
Accelerometer Principle
• An Accelerometer uses Piezo electric principlegiven in next slide to measure the acceleration
directly
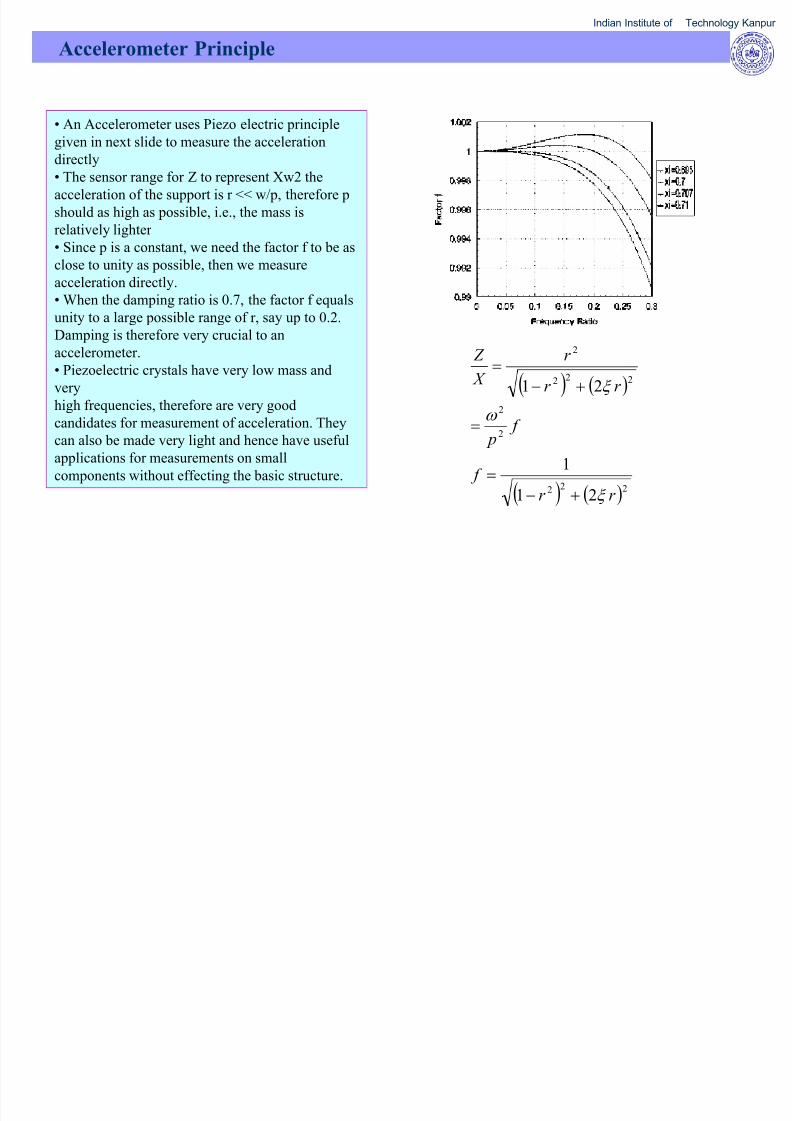
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 242/283
• The sensor range for Z to represent Xw2 the
acceleration of the support is r << w/p, therefore p
should as high as possible, i.e., the mass is
relatively lighter • Since p is a constant, we need the factor f to be as
close to unity as possible, then we measure
acceleration directly.
• When the damping ratio is 0.7, the factor f equals
unity to a large possible range of r, say up to 0.2.
Damping is therefore very crucial to an
accelerometer.
• Piezoelectric crystals have very low mass and
very
high frequencies, therefore are very good
candidates for measurement of acceleration. Theycan also be made very light and hence have useful
applications for measurements on small
components without effecting the basic structure.
( ) ( )
( ) ( )222
2
2
222
2
21
1
21
r r
f
f p
r r
r
X
Z
ξ
ω
ξ
+−=
=
+−=
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 243/283
Indian Institute of Technology Kanpur
Accelerometer Elements

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 244/283
Output impedance from accelerometer is very high - problems
matching, noise, cable length Charge amplifier is therefore used.
Elements of a measurement system
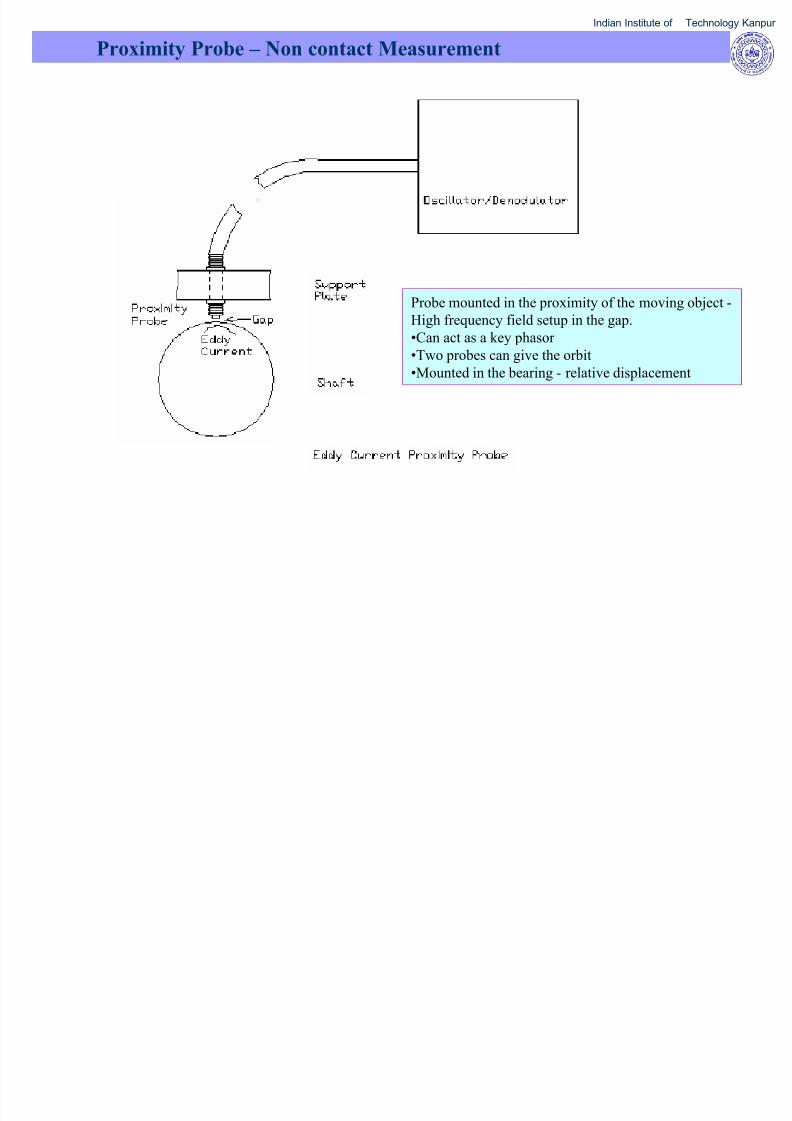
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 245/283
Indian Institute of Technology Kanpur
Sinusoid Signal - Characteristics

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 246/283
• The vibration signal in general is somewhat periodic with
several harmonics, the basic signal is therefore a sinusoid.
• A sinusoid, its squared sinusoid are shown above. Since the
energy in the system is proportional to velocity squared, we
prefer a root mean square value of the amplitude, rms value, to
judge the condition of the machine.
Indian Institute of Technology Kanpur
Calculation of RMS Value - Sinusoid

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 247/283
Let the pk to pk value of a sinusoid be 240 mils/s.
• The amplitude is 240/2 = 120 mils/s• Square of the signal varies from 0 to 1202 = 14400 mils/s
• Mean of the square = 7200 mils/s
• RMS = (7200)1/2 =120/1.414 = 84.85 mils/s• Pk to Pk RMS = 169.7 mils/s
Indian Institute of Technology Kanpur
Sum of Two Sinusoids in Phase
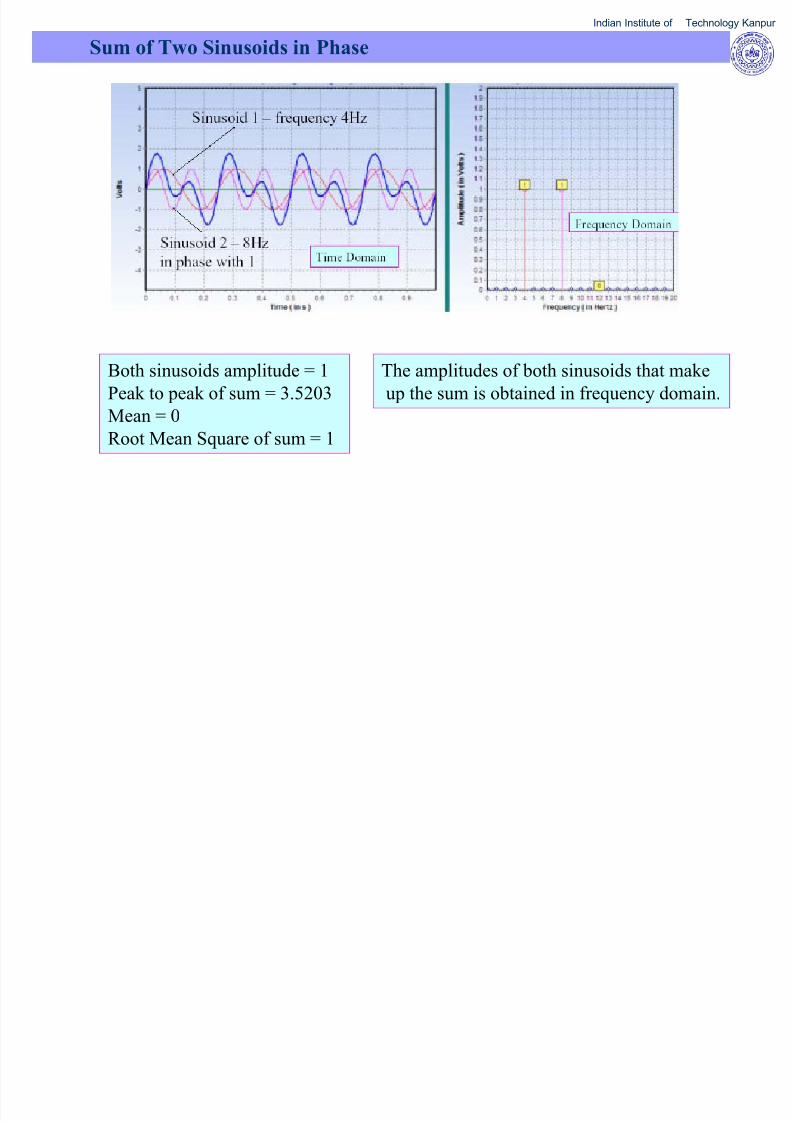
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 248/283
Both sinusoids amplitude = 1
Peak to peak of sum = 3.5203
Mean = 0
Root Mean Square of sum = 1
The amplitudes of both sinusoids that make
up the sum is obtained in frequency domain.
Indian Institute of Technology Kanpur
Sum of Two Sinusoids out of Phase

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 249/283
Peak to peak = 3.2506
Mean = 0
Root Mean Square = 1
• Frequency Domain remains same
• Phase Information lost
Indian Institute of Technology Kanpur
Consider a periodic signal with a sum (-0.1 sin 81.1t +0.05
sin 173.52t). Let us find the means, mean squares and root
mean squares of the components and the total signal.1. Let the two components be denoted by 1 and 2. The mean
values of individual components as well as the sum, being
Calculation of RMS with two components
0791.000125.0005.0
0354.000125.02
0707.0005.01
=+=
==
==
total RMS
RMS
RMS

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 250/283
harmonic signals, are zero
M1 = 0, M2 = 0, Mean of sum = 0
2. The time period of the lower frequency is large of the two
and is given by 2p /81.1 = 0.0775 s. We now follow the steps
given here to find MS (mean squares) and RMS [Integrate
and average over the period 0.0775s]
( ) ( )[ ]
( ) ( )[ ]
00125.0005.0
0775.02
0025.00775.0201.0
0775.01
52.173sin0025.01.81sin1.00775.0
1
52.173sin05.01.81sin1.00775.0
1
0775.0
0
22
0775.0
0
22
+=
×+
×=
+=
+=
∫
∫
dt t t
dt t t MS
units 0.1582 signal allover of pk pk to RMS =
2
2cos1sin 2 pt
pt −
=
Note
and integral of cosine term becomes zero

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 251/283
Indian Institute of Technology Kanpur
• Fourier analysis is a mathematical tool
th t h l i id tif i th f
Fourier Analysis
( ) ( )
( )T
n
nn t bt naat f 1
0
2
sincos21
∞
=++=
∫
∑ ω ω
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 252/283
that helps us in identifying the frequency
components of a periodic vibration signal
which is composed of several harmonics.• The periodic signal is assumed to consist
of several harmonics of the fundamental
frequency and an infinite series gives
accurate results. In practice, first few
components are considered. The harmoniccosine and sine components are
• The amplitude in each harmonic, n = 1, 2,
is given by
• The phase angle is
( )
( )
( ) ( )
n
nn
nnn
n
n
T
n
n
a
b
baA
nt nAat f
tdt nt F T
b
tdt nt F T
a
1
22
1
0
0
0
tan
cos2
1
sin2
cos2
−
∞
=
=
+=
−+=
=
=
∑
∫
∫
φ
φ ω
ω
ω
Indian Institute of Technology Kanpur
Fourier Analysis - Complex Form
• Fourier analysis is written in complex
form so that faster numerical tools can be
developed. The cosine and harmonicterms are written in exponential form as
given here
( )
( )
−=
+=
∞
−
−
111
2
1sin
2
1cos
t int in
t int in
eei
t n
eet n
ω ω
ω ω
ω
ω

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 253/283
g
• The harmonics can be written as one
sided series 0, 1, 2, … infinity
• Or as two sided series, - infinity, …, -2, -1, 0, 1, 2, … infinity.
• In this form we loose phase information,
the harmonics in two sided series have a
magnitude equal to half the values.
• A finite time signal is considered in thisprocess.
• Average power of the signal over a
period of time, T0 is
• Complex harmonic components directly
represent the average power in thecorresponding frequency term, this is
Parseval theorem.
( ) ( )
( )
( )
∑
∑
∫
∫
∑
∑
=
+
=
=
=
=−=
=
++−+=
∞
=
+
−
∞+
∞−
=
−
21
22
0
0
2
0
2
1
21
1
0
22
1
)(1
Complex
Components
Harmonic
2
1
2
1
)( series sided Two
2
1
2
1
2
1)(
0
n
n
n
T
av
T
T
t in
nn
ssnnn
t in
n
n
t in
nn
t in
nn
C
Aa
dt t xT
P
et f
T
C C
AC ibaC
eC t f
eibaeibaat f
ω
ω
ω ω
We will get back to this again
Indian Institute of Technology Kanpur
Saw Tooth Signal
( ) 04
2 0<<−= T t T
t t x

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 254/283
• To illustrate the usefulness of Fourier series, consider a periodic
saw tooth signal given above with its components.
• The top figure shows addition of terms one by one up to six.• The figure below shows the net result of sum of first six terms,
which is getting closer to the original saw tooth form.
( )
,...3,2,12
sin4
6sin
3
14sin
2
12sin
4
0
000
0
0
==
++=
k T
kt
k
T
t
T
t
T
t
T
π
π
π π π
π
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 255/283
• We can increase the number of terms in the summation to get more accurate result.
• Sixty terms sum is given in the figure below.• In practice, we are interested in the lower harmonics, or those harmonics which can be
excited to resonance from any per rev or nozzle excitations.
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 256/283
• Here, the sum up to 25 terms is given above with the harmonics in
frequency domain given below.• The first harmonic is one unit, followed by the second at ½ unit and
the higher ones decrease in magnitude rapidly.
Indian Institute of Technology Kanpur
Rectangular Signal
( )
...2
5sin5
123sin
3
12sin
42/01
2/01
000
0
0
+++=
<<−=
<<=
k
T
t
T
t
T
t T t
T t t x
π π π
π

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 257/283
• This and the next slide illustrate a rectangular periodic signal and its Fourier components.
,...3,2,12
sin4
0
== k T
kt
k
π
π
Indian Institute of Technology Kanpur

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 258/283
Indian Institute of Technology Kanpur
Octave Band Analysis
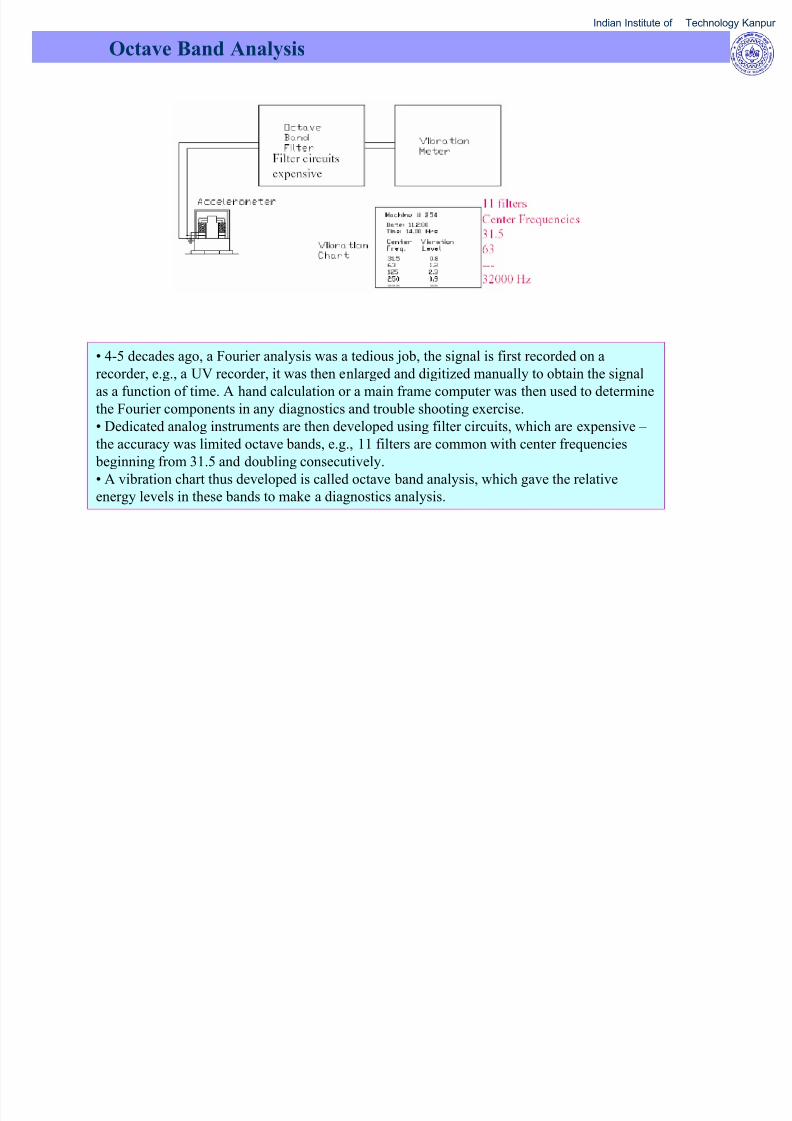
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 259/283
• 4-5 decades ago, a Fourier analysis was a tedious job, the signal is first recorded on a
recorder, e.g., a UV recorder, it was then enlarged and digitized manually to obtain the signal
as a function of time. A hand calculation or a main frame computer was then used to determine
the Fourier components in any diagnostics and trouble shooting exercise.
• Dedicated analog instruments are then developed using filter circuits, which are expensive – the accuracy was limited octave bands, e.g., 11 filters are common with center frequencies
beginning from 31.5 and doubling consecutively.
• A vibration chart thus developed is called octave band analysis, which gave the relative
energy levels in these bands to make a diagnostics analysis.
Indian Institute of Technology Kanpur
Sequential analysis
One filter at a time
A l i i

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 260/283
• Subsequently, we had 1/3 octave band analyzers which helped in
narrowing the frequency zones for a better diagnostics.
Analysis time
between each analysis
Significant transientdata may be lost
Indian Institute of Technology Kanpur
Fourier Transform – time to frequency domain
•Not limited to periodic functions alone
•Achieved through Fourier Integral•Aperiodic function repeats itself
after a large (infinite) time

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 261/283
•Inverse Transform – Conversion
from frequency to time domain
g ( )
•Associated frequency becomes negligibly small
•Replace w by w’, nw’ becomes continuous•T = 2 / pw’ approaches infinity
Forward Transform – Fourier Integral( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )∫
∫
∫
∞+
∞−
−−
∞+
∞−
−
∞+
∞−
−∞→
==
==
==
→
ω ω π
ω
ω
ω
ω ω
ω
ω
ω
d ef F F t f
dt et f t Ff F
dt et f TC F
n
t i
t i
t iT n
2
11
Indian Institute of Technology Kanpur
Discrete Fourier Transform (DFT)
• f(t) is analog should be convertedto a digital text file
• N intervals of a vibration record in
( )
( )
( )1 2
1,2,1,01
1,2,1,0
1,
2,,0
− −
−==
−==
−=
∑N
N
kr i
k
k
NrefF
N k N kT
N
T N
N
T
N
T t
K
K
KK
π

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 262/283
time T, time step T/N
• Frequency of the entire period = 2p /T
• Discrete frequencies 2p /0, 2pN /T , 2pN /2T , 2pN /3T, … 2pN /(N-1)TExample:
• Let 5000 samples be taken in 1 sec.
• Let us use N = 4096 out of these 5000 data points.
• T = 4096/5000
• Smallest discrete frequency = 2pN /(N-1)T = 2p(4096) /[4095(4096/5000)] rad/s
= 5000/4095 = 1.22 Hz.
( )
[ ] 11
0
1
1,2,1,0
×××
=
=
∑
N N N N
k
k r
F AF
N r ef N
F K
Indian Institute of Technology Kanpur
Fast Fourier Transform - FFT
[ ] 11
1××× = N N N N F A
NF
[ ] [ ]roweachin elements zeronon only two
A matrices log into factored i2 N A

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 263/283
N
N kr i
kr eaπ 2−
=
[ ]
→↓←↑
↓↑↓↑
←↓→↑
↑↑↑↑
=
3
2
1
0
A
[ ] [ ][ ] [ ]
↓↑
↓↑
↑↑
↑↑
←↑
→↑
↓↑
↑↑
=
=
00
00
00
00
00
00
00
00
1000
0010
0100
0001
21 AAP A
4NFor =
[P] Permutation matrix
Indian Institute of Technology Kanpur
• On the present day Desk top or lap top
computers, FFT can be performed in millisecs, thus making the conversion of time
domain data to frequency domain almost
instantaneous and in real time
Comparison - DFT/FFT Computation Requirements

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 264/283
instantaneous and in real time.
• With an A/D converter card, a lap top hasthus become a good diagnostics
instrument and tool.
Indian Institute of Technology Kanpur
Amplitude Modulated Signal
( )
( ) ( )aa
a
aa
xtox
x
t t xxt x ω ω
x-x Amplitude
Amplitude Modulation
coscos
+
+=

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 265/283
aω Frequency Modulation
( )
( ) ( )t xt xt x
t t xxt x
aaaa
aa
ω ω ω ω ω
ω ω
−+++=
+=
cos2
1cos
2
1cos
coscos
bandsside
- and
speed rotational
frequencycarrier
frequencymeshgear
gear mountedllyEccentrica
acac
a
c
=
+
=
ω ω ω ω
ω
ω
Indian Institute of Technology Kanpur
Amplitude Modulated Signal

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 266/283
Mean = 0
Mean square = 0.56
Root Mean Square = 0.75Side bands in Frequency domain
Indian Institute of Technology Kanpur
Frequency or Phase Modulated Signal
( ) ( )( ) ( )
modulation of frequency and magnitude - and'
Re
cos'cos
ω ω
ω ω ω ω
φ =
+=
a
t ia
Xet x
t t X t x
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 267/283
( ) ( )
Signal. ModulatedFrequency
a is signal resultig theand speed rotational
thetoingcorrespond mean value over the changes
frequencyangular the,vibrationalIn torsion
speedangular Variable
magnitudeconstant of Phasor
' to' variesFrequency
index modulation - /'
q yg
ω ω ω ω
ω ω
+−
a
a
Indian Institute of Technology Kanpur
Frequency or Phase Modulated Signal
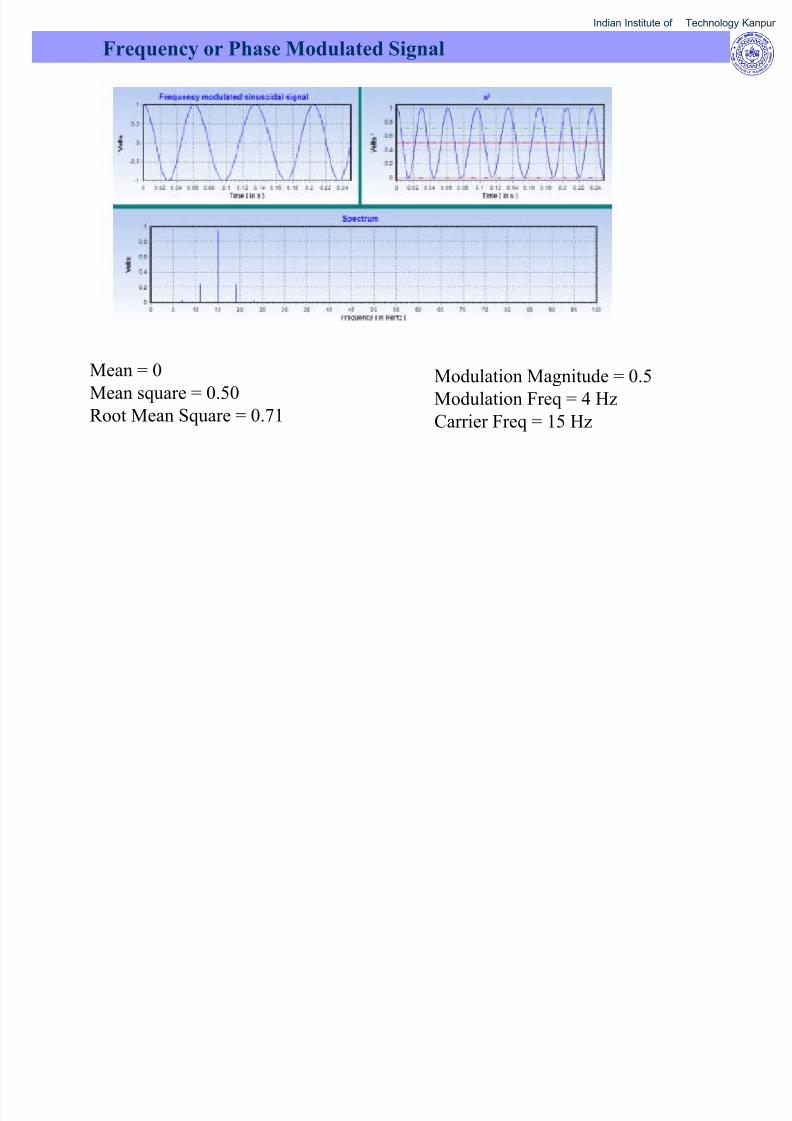
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 268/283
Modulation Magnitude = 0.5
Modulation Freq = 4 Hz
Carrier Freq = 15 Hz
Mean = 0
Mean square = 0.50
Root Mean Square = 0.71
Indian Institute of Technology Kanpur
Torsional Vibration Measurement
Ω
vibrationtorsionalofamplitude
noscillatio torsionalof frequencyspeed rotational
θ
ω

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 269/283
Ω
−=
Ω+∞=Ω−∞=
ΩΩ=
Ω+=
2
to
range speedAngular
tsin -locityAngular ve
tcos t
positionshaft ousInstantane
vibrationtorsionalof amplitude
minmax
maxmin
ω ω θ
θ ω θ ω
θ ω φ
θ ω φ
θ
&

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 270/283
Indian Institute of Technology Kanpur
Power (Auto) Spectrum - Cross-Spectra
• Amplitude spectrum is given by the magnitude
and frequency of each harmonic component.• Power spectrum is obtained by squaring each
amplitude and halving them and plotted in
discrete form at each frequency.
( ) φ ω AF nn
1
SpectrumPower
,
Amplitude Spectrum
Discrete

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 271/283
discrete form at each frequency.
• Auto spectrum is same as power spectrum when
the frequency domain is expressed continuously,
this is obtained by taking the product of F(w)
and its conjugate marked by *
• Auto or Power spectrum is a measure of power
associated with corresponding frequency
component and hence important for vibration
engineers.• Cross spectrum involves two different functions.
Let us take the excitation and response functions
and their cross spectra are defined by
• Cross spectra are used in defining coherence,
which is a degree of linear dependence between
two signals, see next slide.
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )ω ω ω
ω ω ω
ω ω ω
F X
X F x(t)
f(t)
F F
An
*S
*S Response
Excitation
*S
Spectrum Auto2
1
xf
fx
ff
2
=
=
=Continuous
Cross spectra
Indian Institute of Technology Kanpur
Coherence
• Consider the frequency response function.
• Express this function in two different ways, first
using the conjugate of amplitude spectrum of
forcing function and next by using the conjugate
( )( )( )ω ω
ω F
X H =
Frequency Response Function

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 272/283
of amplitude spectrum of response function.
• Coherence is defined by the ratio of these two
response functions.
• If the measurement of forcing function and
response function are free from noise error and
that there is a perfect linear relationship between
them, Coherence will be unity.
• Coherence can be used to determine whether two
different signals are coming from the same
machine or if any of the signals are lost in
measurement due to some fault, coherence
between a good and a bad signal will be poor.This property can be used in identifying any
faulty sensor or problem in the transmitting path.
( )
( )
( )( ) ( )( ) ( )
( )
( )ω
ω
ω ω
ω ω
ω
ω
ω
ff
xf
S
S
F F
F X
F
X
H
=
=
=
,*
*
( )( )
( )( ) ( )( ) ( )
( )( )ω ω
ω ω
ω ω ω
ω ω
fx
xx
S
S
X F
X X F
X H
=
=
=
,*
*
2
( )( )( )
( )
( )
( )
( )ω
ω
ω
ω
ω
ω ω
xx
fx
ff
xf
S
S
S
S
H
H y
=
=2
12

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 273/283
Indian Institute of Technology Kanpur
• Definitions of Cepstrum• Terminology
Cepstrum for Spectrum
Quefrency (sec) for Frequency
Cepstrum - (Time Domain)
( ) ( )[ ] 2log
spectrumpower clogarithmiaof spectrumPower
ω τ xxxx S F C =
spectrumpower clogarithmi of ansformFourier tr Inverse

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 274/283
Q y ( ) q y
Rahmonics for Harmonics
Lifter for Filter Gamnitude (Hz) for Magnitude
Saphe for Phase
• Applications
• Side bands of a multi stage gear box,
they appear as distinct frequencies incepstrum domain.
( ) ( )[ ]ω τ xxxx S F C log1−=
sec/1and/1
frequencyat peaksdistinct Two
and sdifferencefrequency
bands side of families Two
cepstrumin peaksdistinct asAppear spectrumainstructures periodicIdentify
21
21
∆f ∆f
Hz ∆f ∆f
( ) ( )[ ]ω τ X F C xx log
spectrum amplitude of ansformFourier tr Inverse
1−=
Indian Institute of Technology Kanpur
Two Speed Gearbox with Defects
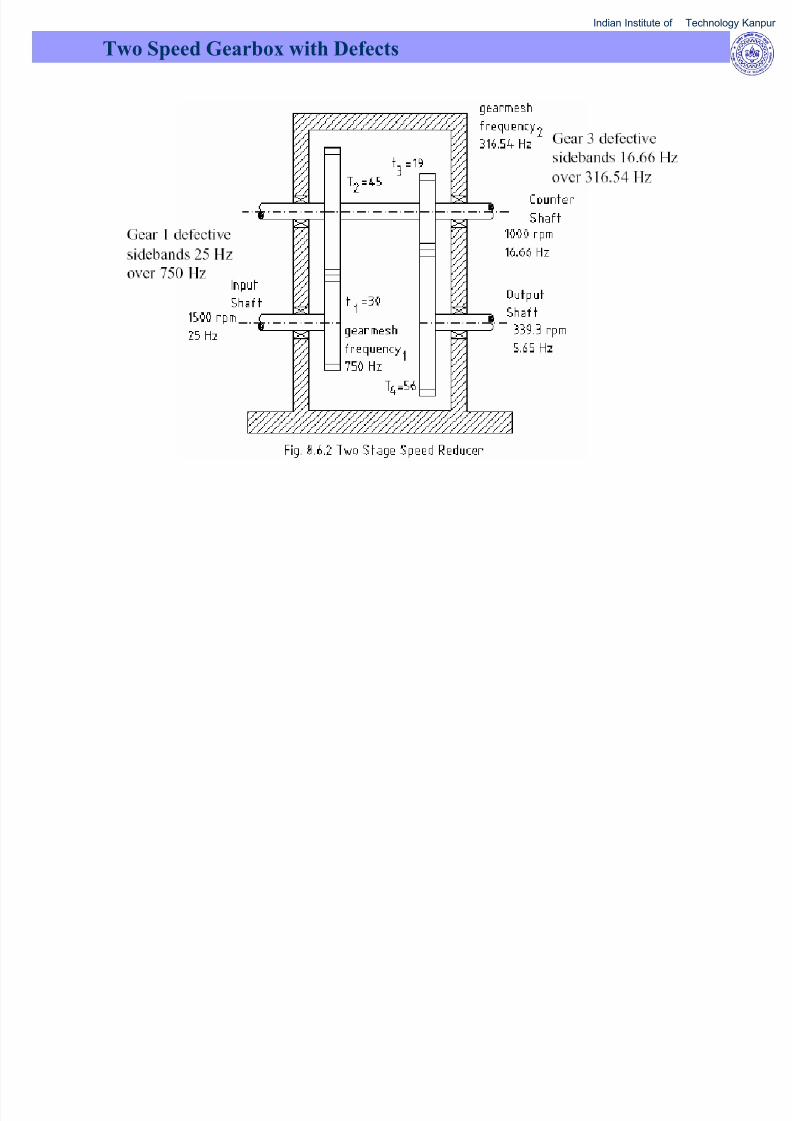
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 275/283
Indian Institute of Technology Kanpur
Advantage of Cepstrum Analysis
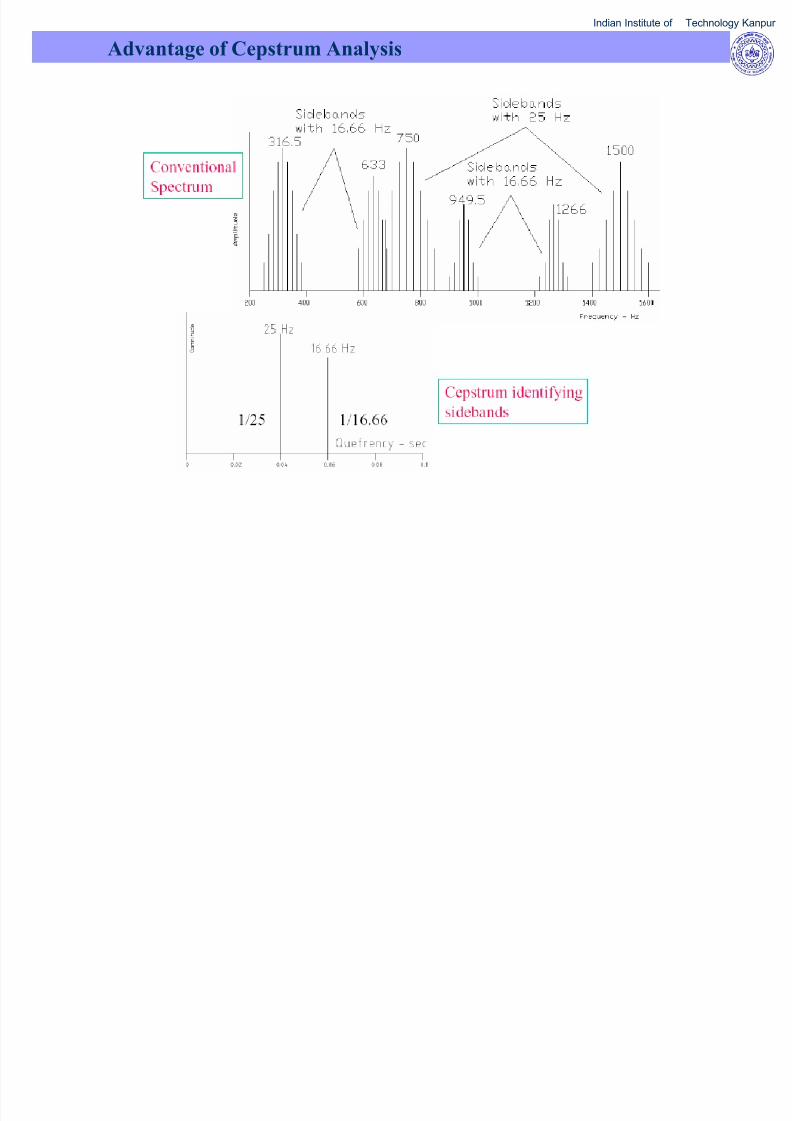
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 276/283
Indian Institute of Technology Kanpur
A/D Converter
• Analog to Digital converters and
modern high speed desk top computers
have revolutionized the way we record
and analyze vibration and other
process parameter time domain
signals The analog tape recorders

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 277/283
signals. The analog tape recorders
have disappeared and the storage has
become very simple and reliable. Theanalog instruments have also been
replaced by software and we can have
today a sensor and its conditioner
directly connected to a computer for
all the required analyses in real time.
• A 3 bit parallel A/D converter isillustrated here. Analog voltage
compared with each node’s voltage
• Output voltage high (on) when the
analog voltage is above ref. voltage
and low (off) when it is below.
• Binary encoder compares and gives a
3 bit binary output.
Indian Institute of Technology Kanpur
3-bit encoder binary output
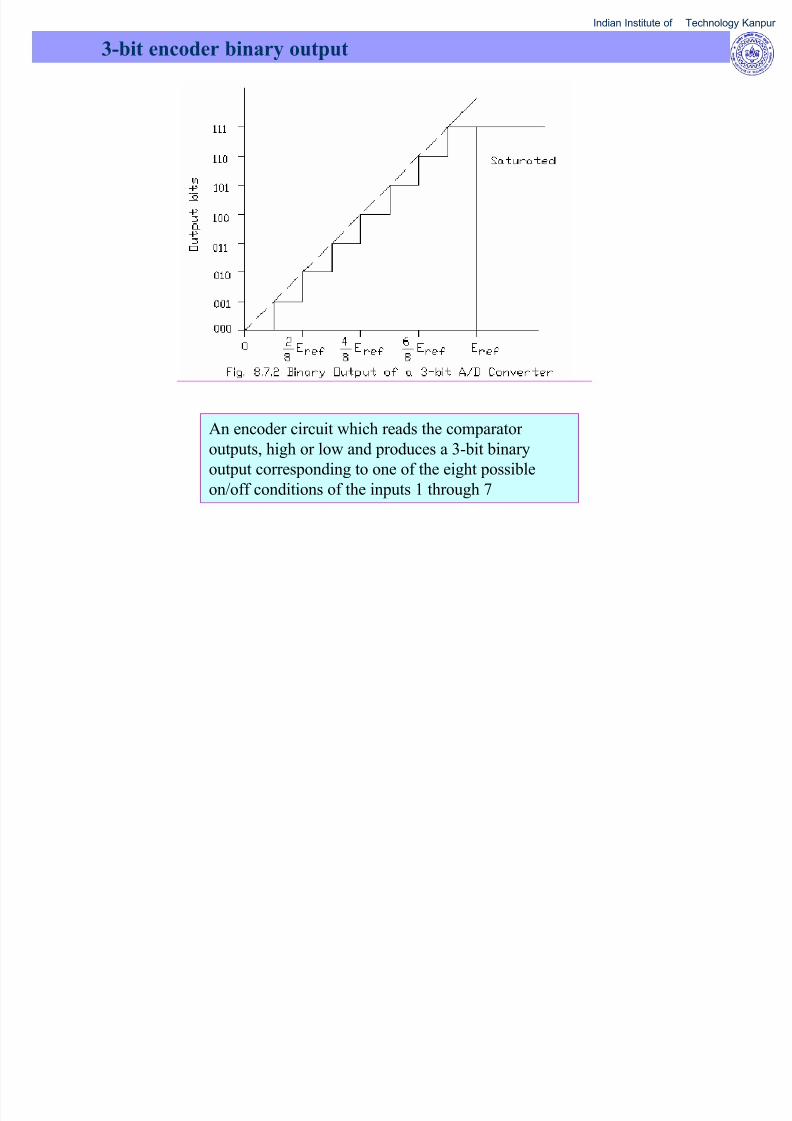
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 278/283
An encoder circuit which reads the comparator outputs, high or low and produces a 3-bit binary
output corresponding to one of the eight possible
on/off conditions of the inputs 1 through 7
Indian Institute of Technology Kanpur
Resolution with
16 bit comparator
Examples
3 bit comparator
V10to10-:tageoutput volfor range Typical +8
5and
8
4between signalInput ref ref E E

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 279/283
range 10V to10-for 0.3mV resolution Voltage
increments 65,536 2 into divided Range
cardconverter A/Dbit-16
bits of number n range, scale full
2
1Ebitper resolution Voltage
2
1output sencoder' parallelbit-3
removaloffset dcor nattenuatio amplitude
viz.,ngconditioni signal eAppropriat
limitlower or upper theexceeds
signalinput theif saturatesConverter
16
nv
3
+
=
∆
∆=
fs
fs
ref
V
V
E
( )
0)(000 isoutput thelow, read scomparator All
7)(111 isoutput thehigh, read scomparator All
4020212100
outputbinary toingcorrespond
4 is stateInput
low read 7-5 andhigh read 4-1 scomparator
2
2
012
2
=
=
=×+×+×=
Indian Institute of Technology Kanpur
Signal Sampling
• Signal sampling is an important
criterion while acquiring the data
• The same signal above shows
t f s
∆=
1 rate Sampling

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 280/283
g
inadequate sampling rate, number of
points captured in a unit time is toolow and the original signal character
is lost.
• Decreasing sampling time or
increasing sampling rate improvesthe digitization process.
Indian Institute of Technology Kanpur
Aliasing – Nyquist Criterion
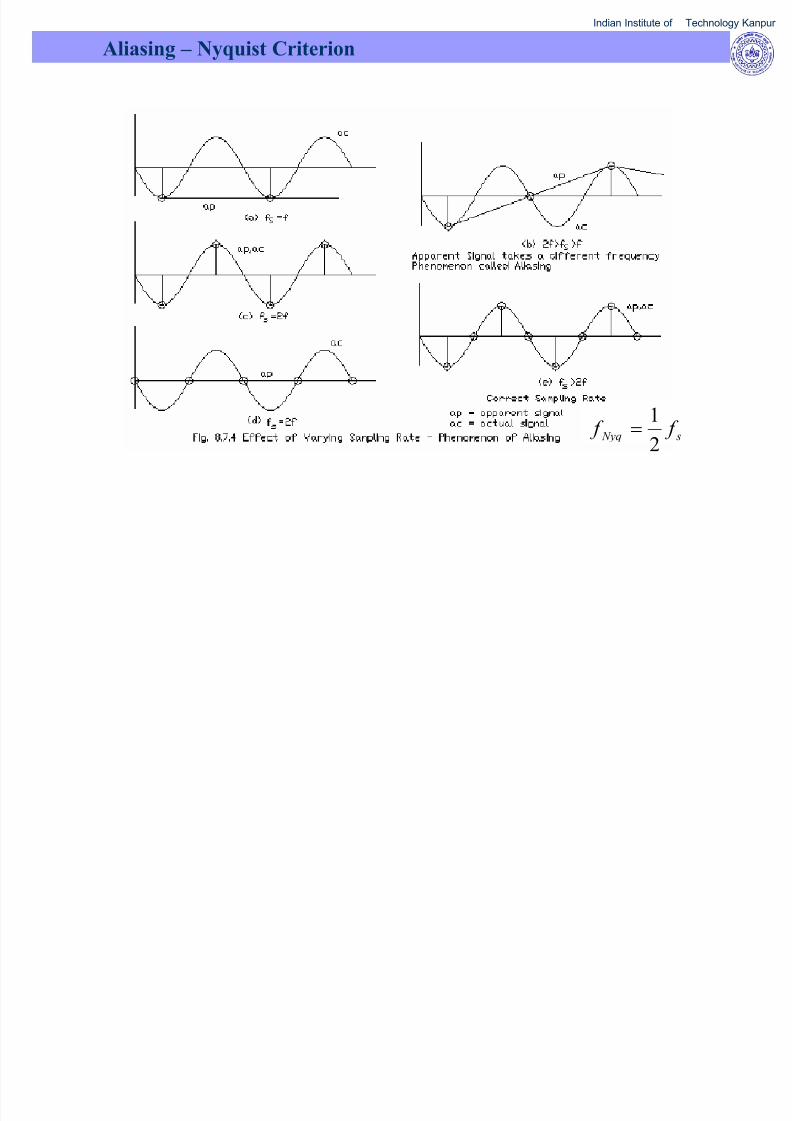
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 281/283
sNyq f f 2
1
=
Indian Institute of Technology Kanpur
Sampling Example
( )f N∆∆2
1 n∆∆f 2∆∆f ∆f, 0, resolved sFrequencie Nyq=KK
8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 282/283
Hz 1.225000/4096 f samples theseof 4096 N
secondper samples 5000 f signalVibratory
4096 FFTin samples of Number
Hz 4000 rage sampling Minimum
rpm) (120,000 Hz 2000 -componentfrequencyHighest
s
==∆=
=
>

8/7/2019 Vibration analysis lectures
http://slidepdf.com/reader/full/vibration-analysis-lectures 283/283