· web viewkita mendefinisikan feeder koordinat p = (xc yc ϕ). koordinat posisi microparts gambar...
TRANSCRIPT
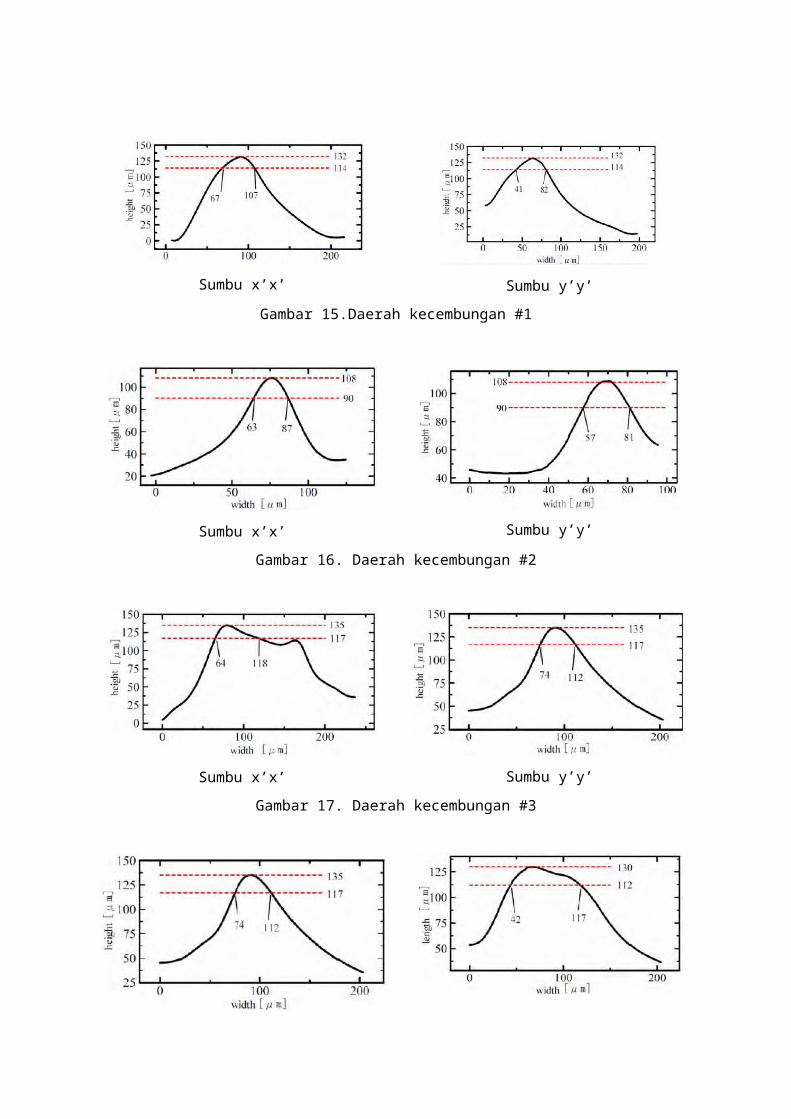
Sumbu x’x’ Sumbu y’y’
Gambar 15.Daerah kecembungan #1
Sumbu x’x’ Sumbu y’y’
Gambar 16. Daerah kecembungan #2
Sumbu x’x’ Sumbu y’y’
Gambar 17. Daerah kecembungan #3
Sumbu x’x’ Sumbu y’y’
Gambar 18.Daerah kecembungan #4


No. Kordinat (x,y), um Radius, um
1 (207,-37) 20
2 (216,51) 13
3 (-241,-36) 24
4 (-200,-6) 36
Tabel 2. Koordinat dan radius dari konvexities
Gambar 19. Modelkecembungan kapasitor 0603
1. Simulasi dan Perbandingan
6.1 Dinamika feeding
Kami melanjutkan penurunan dinamika mikropart untuk konveksitas jamak. Kita
mendefinisikan feeder koordinat P = (xc yc ϕ).
(a) Koordinat (b) Posisi microparts
Gambar 20.Posisi mikropart pada bidang koordinat

Gambar 21. Posisi konveksitas i pada koordinat
G-xy
Gambar 22. Gaya dari mikropart yang telah
diterima dari conveksitas
Kami juga mendefinisikan kecembungan i sebagai ci = (xi yi) pada koordinat G-xy. Dinamika
mikropart direpresentasikan sebagai:
(1)
Dimana m mendefinisikan masa dari mikropart, i inersia, c koefisien redaman dari gerak, dan
d koefisien redaman rotasi. Untuk gaya dan torsi f=(Fx , Fy , τ) T, dihitung dari jumlah gaya yang
ditransfer dari konveksitas masing-masing. Berdasar gaya fi=(fxi , fyi , τi) yang dihasilkan oleh
kontak kekuatan Fi.
(2)
Dengan asumsi bahwa 1,2,..., dan n conveksitas muncul pada permukaan mikropart, gaya f
direpresentasikan sebagai berikut:
(3)
Gambar 23. Perbandingan percobaan dan simulasi
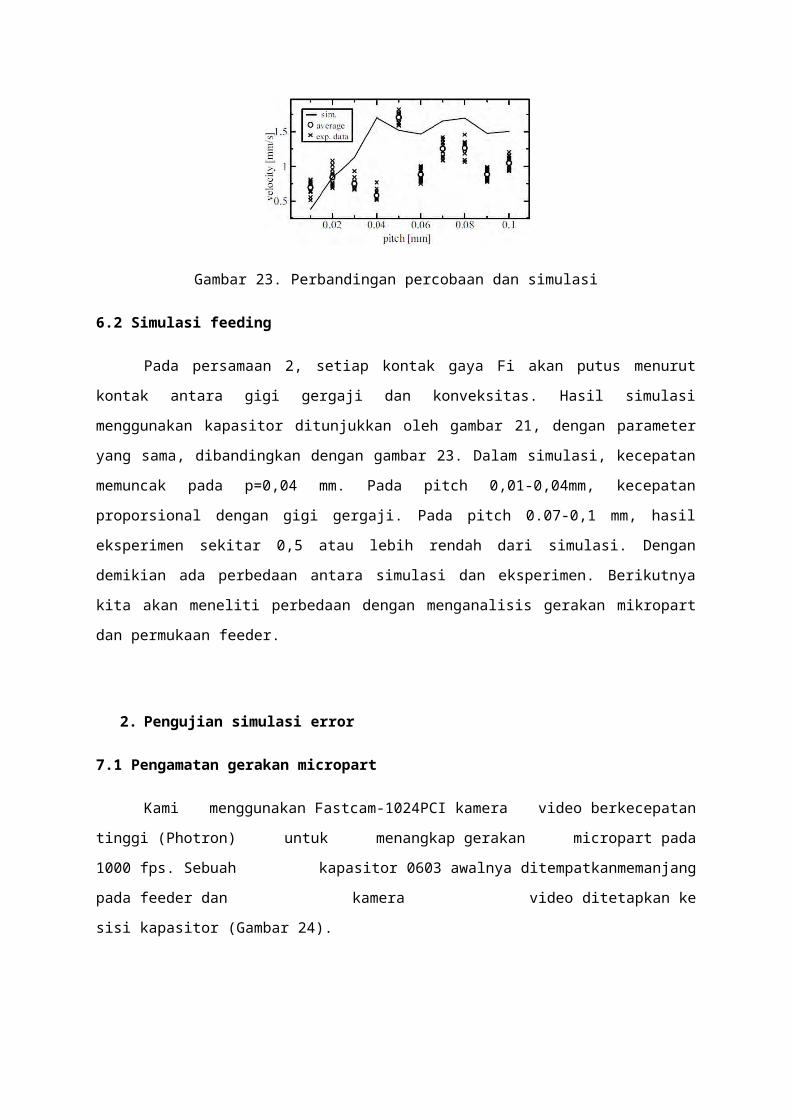
6.2 Simulasi feeding
Pada persamaan 2, setiap kontak gaya Fi akan putus menurut kontak antara gigi gergaji dan
konveksitas. Hasil simulasi menggunakan kapasitor ditunjukkan oleh gambar 21, dengan parameter
yang sama, dibandingkan dengan gambar 23. Dalam simulasi, kecepatan memuncak pada p=0,04 mm.
Pada pitch 0,01-0,04mm, kecepatan proporsional dengan gigi gergaji. Pada pitch 0.07-0,1 mm, hasil
eksperimen sekitar 0,5 atau lebih rendah dari simulasi. Dengan demikian ada perbedaan antara
simulasi dan eksperimen. Berikutnya kita akan meneliti perbedaan dengan menganalisis gerakan
mikropart dan permukaan feeder.
2. Pengujian simulasi error
7.1 Pengamatan gerakan micropart
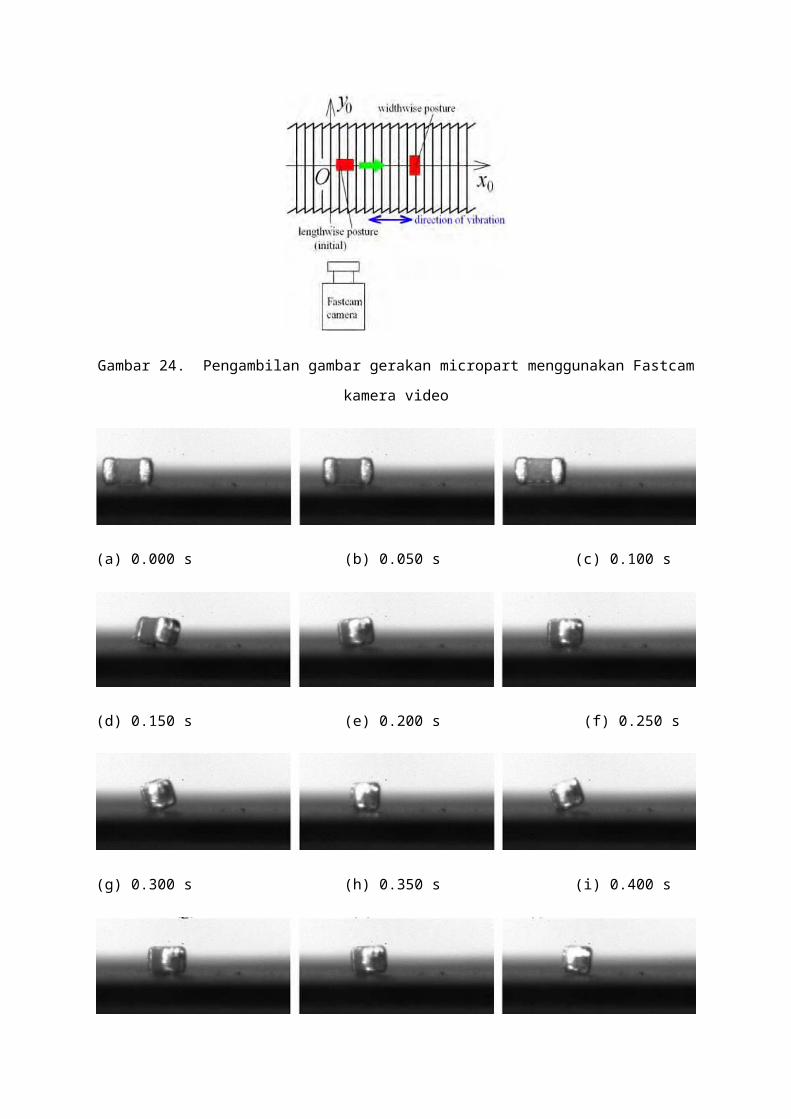
Kami menggunakan Fastcam-1024PCI kamera video berkecepatan tinggi (Photron) untuk
menangkap gerakan micropart pada 1000 fps. Sebuah
kapasitor 0603 awalnya ditempatkanmemanjang pada feeder dan kamera video ditetapkan ke
sisi kapasitor (Gambar 24).
Gambar 24. Pengambilan gambar gerakan micropart menggunakan Fastcam kamera video
(a) 0.000 s (b) 0.050 s (c) 0.100 s
(d) 0.150 s (e) 0.200 s (f) 0.250 s
(g) 0.300 s (h) 0.350 s (i) 0.400 s
(j) 0.450 s (k) 0.500 s (l) 0.550 s
(m) 0.600 s (n) 0.650 s (o) 0.700 s
(p) 0.750 s (q) 0.800 s (r) 0.850 s
Gambar 25. Gerakan Micropart
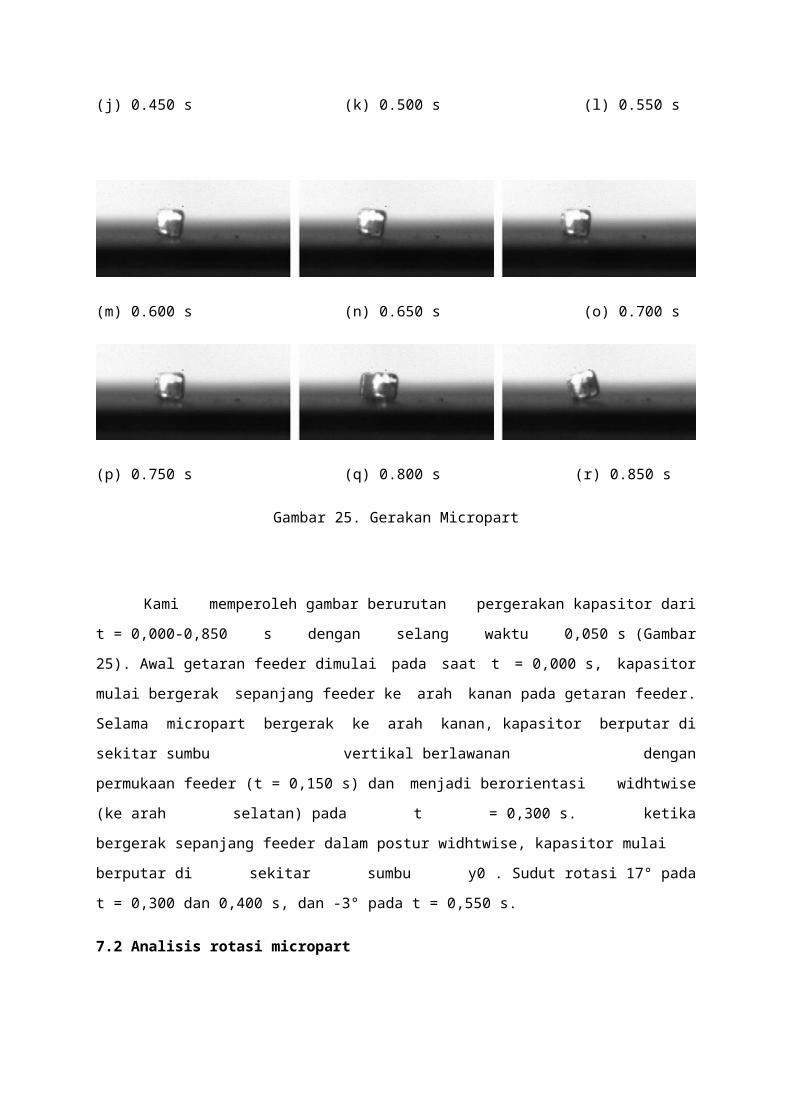
Kami memperoleh gambar berurutan pergerakan kapasitor dari t = 0,000-0,850 s dengan
selang waktu 0,050 s (Gambar 25). Awal getaran feeder dimulai pada saat t = 0,000 s, kapasitor
mulai bergerak sepanjang feeder ke arah kanan pada getaran feeder. Selama micropart bergerak ke
arah kanan, kapasitor berputar di sekitar sumbu vertikal berlawanan dengan
permukaan feeder (t = 0,150 s) dan menjadi berorientasi widhtwise (ke arah selatan) pada t = 0,300 s.
ketika bergerak sepanjang feeder dalam postur widhtwise, kapasitor mulai berputar di sekitar sumbu
y0 . Sudut rotasi 17° pada t = 0,300 dan 0,400 s, dan -3° pada t = 0,550 s.
7.2 Analisis rotasi micropart
Untuk merumuskan rotasi pada saat postur widthwise. Kami menambahkan sumbu z di
koordinat G-xy yang ditunjukkan pada Gambar 19: dimana sumbu z tegak lurus terhadap bidang
xy (Gambar 26). Mengingat rotasi kapasitor di sekitar titik hubung ketika gerigi mengenai
kecembungan Ci dan terhubung dengan gaya Fi, gaya Fτ, yang dihasilkan oleh torsi τi,
direpresentasikan sebagai:
(4)
Jika β adalah sudut antara C1G dan sumbu y, gaya F ' sepanjang sumbu y dapat dirumuskan sebagai:
(5)
Hal ini menunjukkanbahwa kekuatan alat berkurang
akibat rotasi micropart tersebut.Akibatnya, kita perlu mengetahui dinamika rotasi untuk
mendapatkan simulasi gerakanmicroparts yang lebih akurat.
Gambar 26. Micropart rotasi pada postur widthwise
7.3 Analisis permukaan feeder
Menggunakan mikroskop AZ-100 (Gambar 11), kami memperoleh model sintesis
Gambar 27)danmodel kontur (Gambar 28) dari permukaan gigi gergaji. Dari gambar-gambar
tersebut, permukaan feeder telah banyak retak dan kesalahan. Bentuk gerigi yang

tidaksempurna yang menyebabkan kontak tidak stabil antara permukaan dan micropart,
dan mempengaruhi pergerakan micropart. Oleh karena itu, kita perlu merumuskan data model
permukaan feeder yang didasarkan pada pengukuran dengan mempertimbangkan kontak dan
adhesi menggunakan model ini.
Gambar 27. Disintesis model permukaan gerigi (p = 0,1 mm dan θ = 20 deg)
Gambar 28. Model kontur
3. Kesimpulan
Kami memeriksa model permukaan kapasitor 0603 didasarkan pada
pengukuran.Sebuah mikroskop digunakan untuk
menganalisis ukuran kecembungan dipermukaan elektroda. Setiap kecembungan didekati sebagai
model setengah bola. Model ini kemudian diaplikasikan untuk simulasi feederan yang diusulkan
dalam pekerjaan sebelumnya. Perbandingan dengan percobaan feederan, kami menemukan
perbedaan yang besar antara simulasi dan hasil eksperimen. Kami menguji perbedaan-perbedaan
dengan menganalisis bagian pergerakan dengan menggunakan kamera videoberkecepatan tinggi
dan menemukan kesalahan pengamatan dalam simulasi kami. Kapasitor berputar disekitar sumbu
vertikal terhadap permukaan bergerigi dari postur arah memanjang ke arah melebar dan bergerak
sepanjang feeder ke arah yang diinginkan sambil berayun di sekitar sumbu sepanjang gerigi
tersebut. berbeda dengan hasil simulasi gerakan ini mengurangi kecepatan feederan sebenarnya
dari kapasitor . Kami juga memeriksa profil permukaan feeder menggunakan mikroskop, dan
menemukan banyak celah dan kesalahan di bagian atas gerigi, sedangkan pada simulasi
permukaan feeder bergerigi sempurna . Kami menyimpulkan dibutuhkan
analisis rotasi microparts dan model kontak yang antara permukaan feeder dan micropart berdasarkan
pengukuran untuk mensimulasikan feederan lebih akurat.

Di penelitian selanjutnya, kami akan mencoba untuk:
Mengidentifikasi dinamika micropart termasuk rotasi,
Merumuskan data model permukaan dan d dari permukaan gerigi berdasarkan
pengukuran, dan menganalisis kontak dan adhesi menggunakan model yang diturunkan.
Mengembangkan permukaan feeder baru untuk microparts yang lebih kecil, dan,
Memastikan efek kelembaban ambient di feederan.
Penelitian ini didukung sebagian oleh Bantuan Hibah untuk Ilmuwan Muda (B) (20760150)
dari Departemen Pendidikan, Kebudayaan, Olahraga, Sains danTeknologi, Jepang, dan oleh hibah
dari Electro-Mechanic Technology Advancing Foundation (EMTAF), Jepang.