when hard realtime matters: software for complex...
TRANSCRIPT

Dokumentname > 23.11.2004
When Hard Realtime Matters:Software for Complex Mechatronic Systems
Berthold Bäuml and Gerd Hirzinger
Institute of Robotics and MechatronicsDLR – German Aerospace Center

Dokumentname > 23.11.2004
Mechatronic Systems
o “Mechanics in the loop”o demands hard realtime
(= short latencies and determinism)o to prevent injury and damage !

Dokumentname > 23.11.2004
New Level of Complexityo complex single robotic component
(DLR-Hand-II: 13DOF, 100 sensors)o compound systems with tightly interacting parts
(Justin: 43 DOF, 250 sensors)o rates of up to 3kHz over all DOF
(up to 10kHz in next generation)o sophisticated control algorithms
(e.g. gravity compensation, impedance)o tight coupling to non-realtime modules for
user interaction, perception and planning
o Heterogenous team of experts developing software (~ 10 members) o Iterative, flexible and adaptive development flow (esp. for research prototypes)
Challenges:o “modern” software paradigms for complex systems:
o modularity (“component based software engineering”)o concurrent execution (“services”)o distributed execution (“multi core, multi CPU, networked clusters”)
o but under hard realtime constraints.
Dokumentname > 23.11.2004
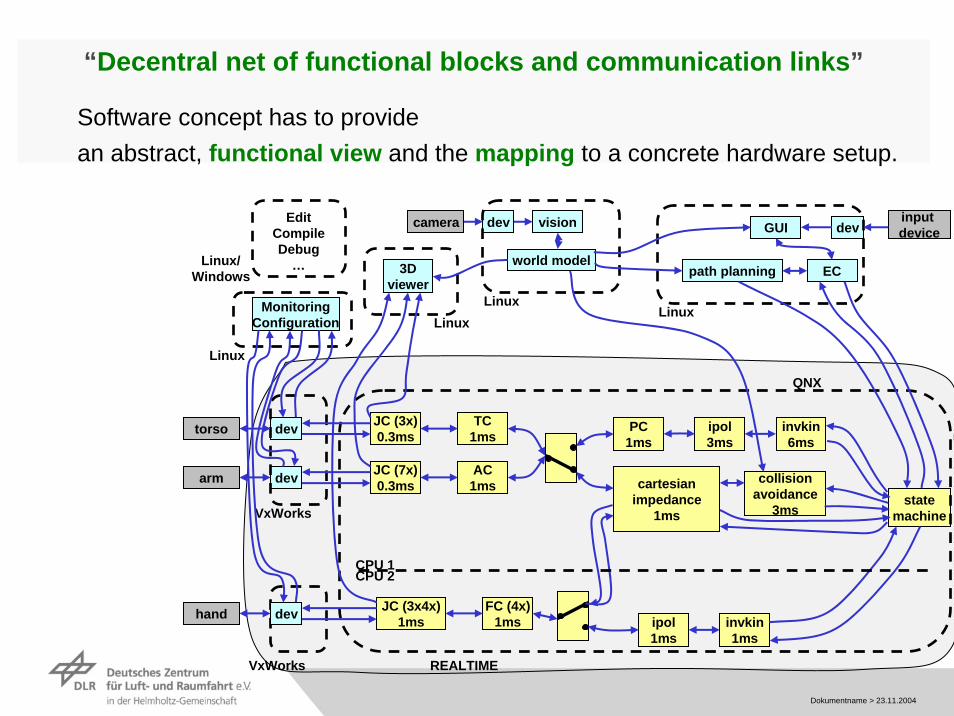
“Decentral net of functional blocks and communication links”
Software concept has to providean abstract, functional viewSoftware concept has to providean abstract, functional view and the mapping to a concrete hardware setup.
vision
world model
devcamera GUI
ECpath planning
devinput device
3Dviewer
EditCompileDebug
…
MonitoringConfiguration
torso JC (3x)0.3msdev TC
1msPC
1msipol3ms
invkin6ms
cartesianimpedance
1msstate
machine
arm JC (7x)0.3msdev AC
1ms
hand JC (3x4x)1msdev FC (4x)
1ms ipol1ms
invkin1ms
collisionavoidance
3ms
LinuxLinux
Linux
Linux
VxWorks
VxWorks
QNX
Linux/Windows
hand dev
REALTIME
CPU 1CPU 2

Dokumentname > 23.11.2004
Robot MiddlewareORCA (Brooks et al. 2005) MARIE (Cote et.al. 2004)MIRO (Utz et al. 2002)Player (Vaughan et al. 2003)
used in mobile roboticssoft realtime in the 100Hz range
MS Robotics Studio(msdn.microsoft.com/robotics
WindowsXP -> non realtime, WindowsCE ?
OROCOS (www.orocos.org)
hard realtime, >500Hz for two 6DOF armsmore complex systems, distributed computation ?
OpenHRP(Kanehiro et al. 2004)
RT-Middleware, based on CORBAin applications hard realtime part in monolithic modules with proprietary communication
MCA (www.mca2.org)
used in humanoid robots ARMARhard realtime on one node, but TCP/IP
YARP (Metta et al. 2006)
used in complex robots like “Domo”, but there the hard realtime parts run on DSP boards supports QNX and based on ACE -> distributed hard realtimeexecution possible ?
MIRPA hard realtime, distributed executionperformance when many DOF ?

Dokumentname > 23.11.2004
Pragmatic Approach
o None of the existing middleware concepts seemed to fit our main needs:hard realtime, scalable computing resources, easy to use.
o How far can we go, when doing it as simple as possible ?
o Hardware constraints ? o D/A- and A/D-conversion in the robotso fast buses up to 1GBit/s to the robotso CPU clocks > 3GHz, Multi-Core and Multi-CPU
(e.g. Quad-DualCore Opteron >50GFLOPS)o fast communication with low delay (1GBit: 1.5KByte in 15us)o configurable infrastructure: eg. switched Ethernet or P2P links
No !

Dokumentname > 23.11.2004
Pragmatic considerations
What is essential ?o deterministic, concurrent executiono fast, deterministic communicationo standarized interfaces for communicationo mechanisms for system configuration, startup and shutdown
and what is not ?o dynamic reconfiguration at runtimeo higher levels of abstractions (e.g abstract “range sensor”)
What can we get from a realtime OS ?o Processeso Shm on one PCo Fast, deterministic drivers to (multiple) network cards
What has to be done ourselves ?o standardized interfaceso abstraction of distributed communicationo system handling

Dokumentname > 23.11.2004
1. aRDnet-suite: lightweight (~3000 lines)o aRDnet-library (C/C++): implementation of block’s ports o ardnet block: bridge between blocks on different PCs
Implementation of aRD-concept(“agile Robot Development”)

Dokumentname > 23.11.2004
vision
world model
devcamera GUI
ECpath planning
devinput device
3Dviewer
EditCompileDebug
…
MonitoringConfiguration
torso JC (3x)0.3msdev TC
1msPC
1msipol3ms
invkin6ms
cartesianimpedance
1msstate
machine
arm JC (7x)0.3msdev AC
1ms
hand JC (3x4x)1msdev FC (4x)
1ms ipol1ms
invkin1ms
collisionavoidance
3ms
Linux
LinuxLinux
Linux
VxWorks
VxWorks
QNX
Linux/Windows
hand dev
REALTIME
CPU 1CPU 2

Dokumentname > 23.11.2004
vision
world model
devcamera GUI
ECpath planning
devinput device
3Dviewer
EditCompileDebug
…
MonitoringConfiguration
torso JC (3x)0.3msdev TC
1msPC
1msipol3ms
invkin6ms
cartesianimpedance
1msstate
machine
arm JC (7x)0.3msdev AC
1ms
hand JC (3x4x)1msdev FC (4x)
1ms ipol1ms
invkin1ms
collisionavoidance
3ms
Linux
LinuxLinux
Linux
VxWorks
VxWorks
QNX
Linux/Windows
hand dev
REALTIME
CPU 1CPU 2

Dokumentname > 23.11.2004
1. aRDnet-suite: lightweight (~3000 lines)o aRDnet-library (C/C++): implementation of block’s portso ardnet block: (UDP)-bridge between blocks on different PCso Unix-like hierarchical startup and shutdown of distributed system,
with detailed configuration of QoS for communication2. Matlab/Simulink-toolchain
o standard tool for control design o Automatic code generation with RTWo Parallelizing with RTLab from OpalRT (www.opal-rt.com)o stubs for interfacing aRDnet-blocks
Implementation of aRD-concept

Dokumentname > 23.11.2004
vision
world model
devcamera GUI
ECpath planning
devinput device
3Dviewer
EditCompileDebug
…
MonitoringConfiguration
torso JC (3x)0.3msdev TC
1msPC
1msipol3ms
invkin6ms
cartesianimpedance
1msstate
machine
arm JC (7x)0.3msdev AC
1ms
hand JC (3x4x)1msdev FC (4x)
1ms ipol1ms
invkin1ms
collisionavoidance
3ms
Linux
LinuxLinux
Linux
VxWorks
VxWorks
QNX
Linux/Windows
hand dev
REALTIME
CPU 1CPU 2

Dokumentname > 23.11.2004
vision
world model
devcamera GUI
ECpath planning
devinput device
3Dviewer
MonitoringConfiguration
torso dev
statemachine
arm dev
hand dev
Linux
LinuxLinux
Linux
VxWorks
VxWorks
Linux/Windows
EditCompileDebug
…
QNX
REALTIME
CPU 1CPU 2

Dokumentname > 23.11.2004
1. aRDnet-suite: lightweight (~3000 lines)o aRDnet-library (C/C++): implementation of block’s portso ardnet block: (UDP)-bridge between blocks on different PCso Unix-like hierarchical startup and shutdown of distributed system,
with detailed configuration of QoS of communication links2. Matlab/Simulink-toolchain
o standard tool for control design o Automatic code generation with RTWo stubs for interfacing aRDnet-blocks
Key decision: QNX for realtime and Linux for non-realtime(limited support for VxWorks and Windows)
Implementation of aRD-concept
Dokumentname > 23.11.2004
1. send4. rec
QNX
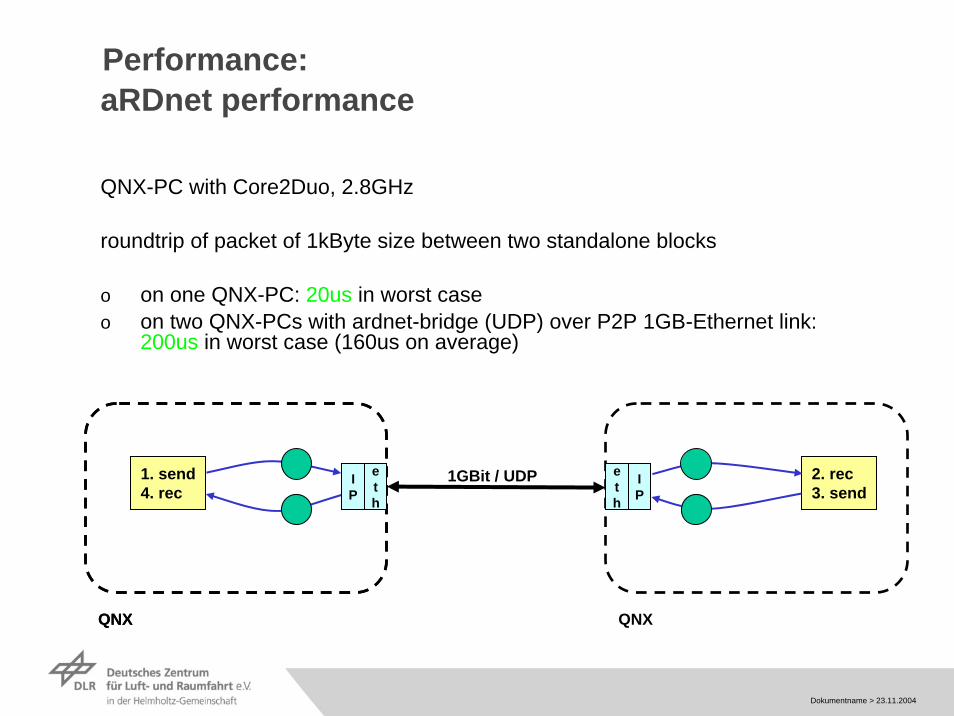
Performance:
QNX-PC with Core2Duo, 2.8GHz
roundtrip of packet of 1kByte size between two standalone blocks
o on one QNX-PC: 20us in worst caseo on two QNX-PCs with ardnet-bridge (UDP) over P2P 1GB-Ethernet link:
200us in worst case (160us on average)
1. send4. rec
QNX
2. rec3. send
QNX
eth
IP
IP
eth
1GBit / UDP
aRDnet performance

Dokumentname > 23.11.2004
QNX
Performance:High Rate
Simulink-HIL-setup: reading analog values and writing them to harddisk
o Rates > 50 KHz without drop-outs possible o At 30 KHz system overhead is less than 10 % cpu-time
AD HDworld
Dokumentname > 23.11.2004
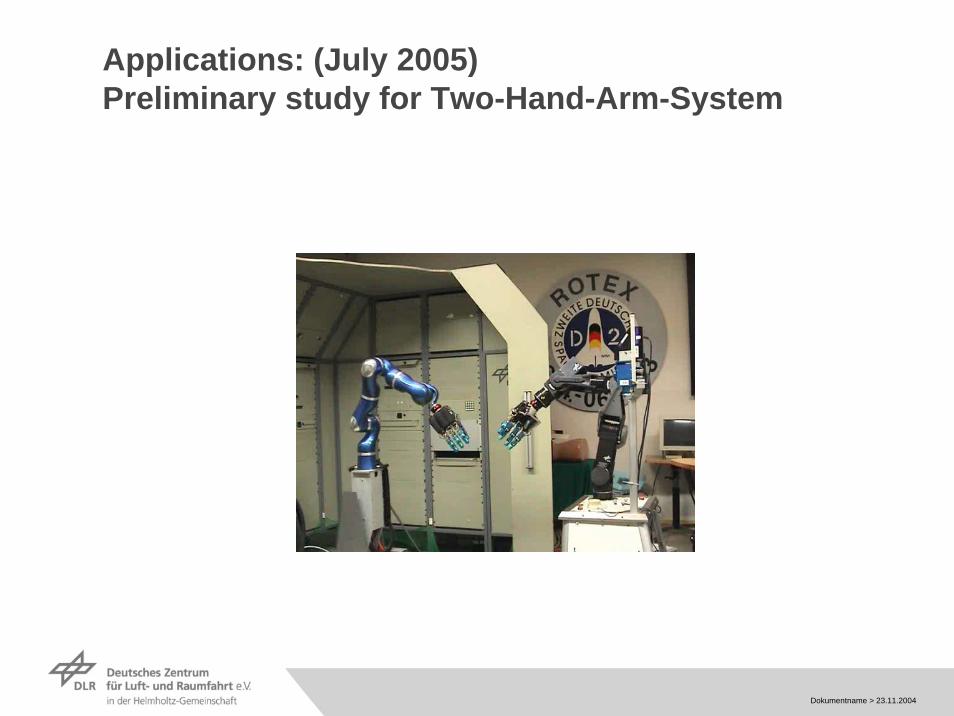
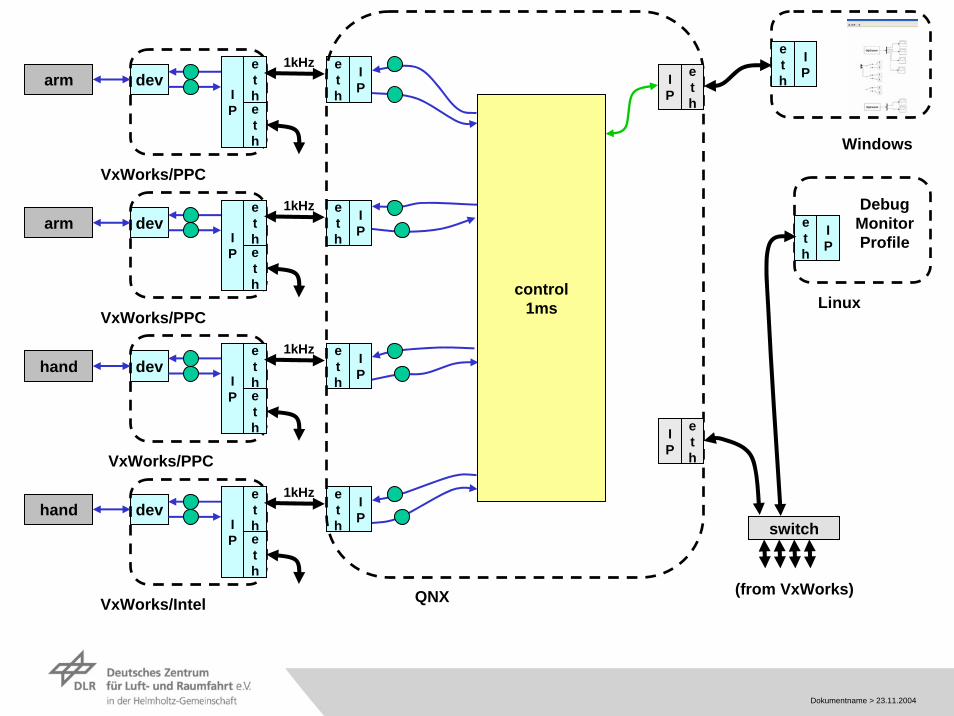
Applications: (July 2005)Preliminary study for Two-Hand-Arm-System
Dokumentname > 23.11.2004
hand dev
VxWorks/Intel
IP
eth
ethI
P eth
hand dev
VxWorks/PPC
IP
eth
ethI
P eth
arm dev
VxWorks/PPC
IP
eth
ethI
P eth
arm dev
VxWorks/PPC
IP
eth
ethI
P eth
control1ms
Windows
IP
eth
Linux
IP
eth
DebugMonitorProfile
switch
eth
IP
eth
IP
(from VxWorks)QNX
1kHz
1kHz
1kHz
1kHz
Dokumentname > 23.11.2004
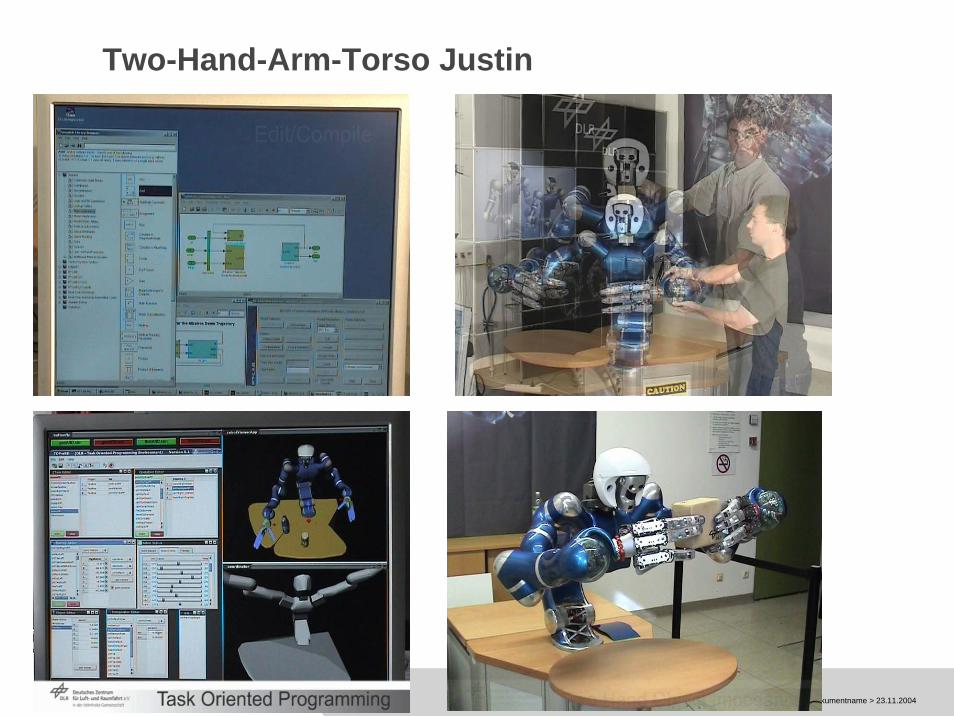
Applications: (May 2006)Two-Hand-Arm-Torso Justin

Dokumentname > 23.11.2004
vision
world model
devcamera GUI
ECpath planning
devinput device
3Dviewer
torso dev
statemachine
arm dev
hand dev
Linux
LinuxLinux
QNX
Linux/Windows
REALTIME
arm dev
hand dev
CPU 1CPU 2

Dokumentname > 23.11.2004
vision
world model
devcamera GUI
ECpath planning
devinput device
3Dviewer
statemachine
hand dev
Linux
LinuxLinux
Linux
QNX
Linux/Windows
REALTIME
hand dev
torso dev
arm dev
VxWorks
arm dev
VxWorks
Dokumentname > 23.11.2004
Two-Hand-Arm-Torso Justin

Dokumentname > 23.11.2004
Applications
o Two-Hand-Arm-Torso Justino Virtual reality with haptic feedbacko Telepresence/Telemanipulationo Medical roboticso Brain/Muscle-Interface-Groupo Teststands
o Fingero Armo Micro-surgical deviceso …
o Dynamics simulatorso Ball catchingo …
o …~ 15 “aRD-seats” at our intsitute

Dokumentname > 23.11.2004
Conclusions
o hard realtime is a must, when mechanics is in the loopo increasing complexity of mechatronic systems demands for modern
software concepts also there, namely: modularity, concurrent execution, distributed execution
o an “operating system for robotics” has to provide hard realtimeo our pragmatic and lightweight aRD concept proved the feasibility even on
“cheap” PC based computing hardware byo introducing only a thin layer of abstraction above the realtime OSo allowing to configure the QoS of all communication
Hope, that a perfect operating systems for robotics will emerge soon, so that we can again work on that, what roboticists love to do …

Dokumentname > 23.11.2004
Justin Serving Tea …