3. erzwungene schwingungenwandinger.userweb.mwn.de/la_tmet/v4_3.pdf · prof. dr. wandinger 4....
TRANSCRIPT
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-1
3. Erzwungene Schwingungen
● Bei erzwungenen Schwingungen greift am schwingenden System eine zeitlich veränderliche äußere Anregung an.
● Kraftanregung:– Am schwingenden System greift eine zeitlich veränderliche
äußere Kraft an.● Weganregung:
– An einem Punkt des schwingenden Systems ist eine zeitlich veränderliche Bewegung vorgeschrieben.
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-2
3. Erzwungene Schwingungen
3.1 Kraftanregung
3.2 Weganregung
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-3
3.1 Kraftanregung
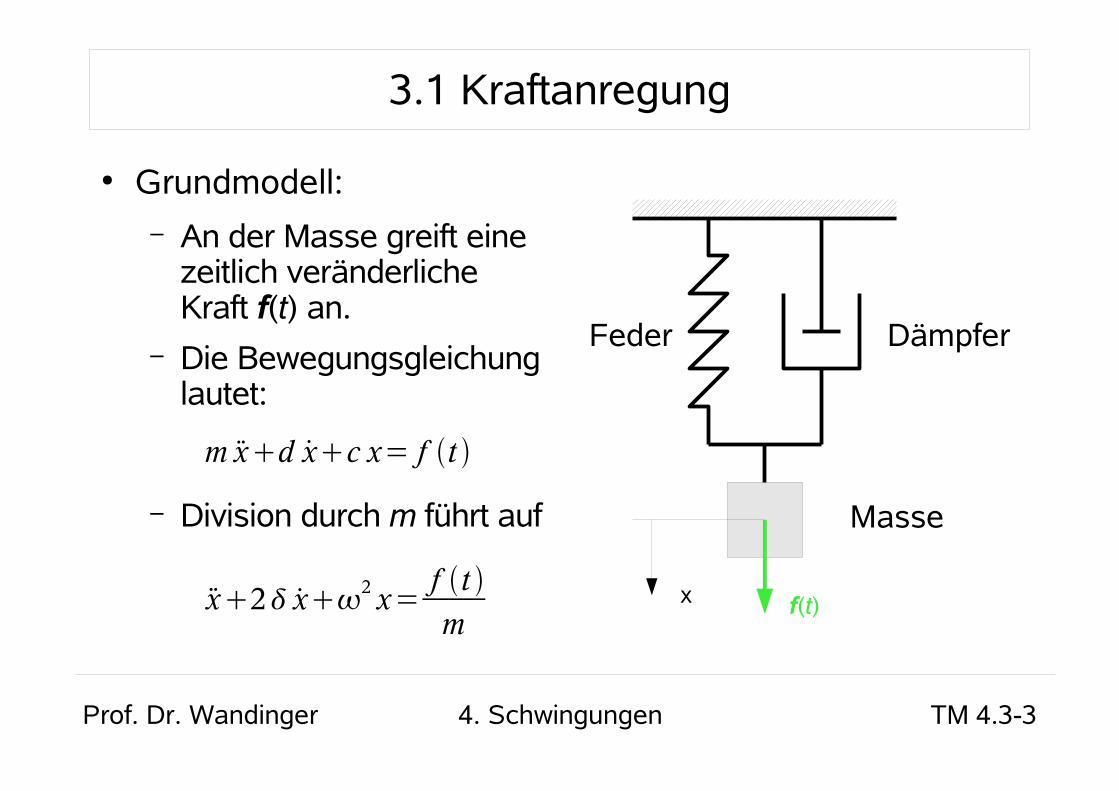
● Grundmodell:– An der Masse greift eine
zeitlich veränderliche Kraft f(t) an.
– Die Bewegungsgleichung lautet:
– Division durch m führt auf
Feder Dämpfer
Masse
x f(t)
m xd xc x= f t
x2 x2 x=
f t
m
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-4
3.1 Kraftanregung
● Wichtiger Spezialfall: Harmonische Kraft– Eine harmonische Kraft hat die Form .– Dabei ist Ω die Erregerkreisfrequenz und F(Ω) die Amplitu-
de der Kraft, die im Allgemeinen von der Erregerkreis-frequenz abhängen kann.
– Jede periodische Kraft kann als Überlagerung von harmonischen Kräften dargestellt werden.
– Die Antwort des Systems auf eine periodische Kraft ist die Überlagerung der Antworten auf die harmonischen Kräfte.
f t =F sin t
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-5
3.1 Kraftanregung
● Allgemeine Lösung:– Die allgemeine Lösung der inhomogenen Gleichung
setzt sich zusammen aus einer partikulären Lösung der inhomogenen Lösung und der allgemeinen Lösung der homogenen Gleichung
– Die Lösung der homogenen Gleichung ist eine freie ge-dämpfte Schwingung.
x2 x2 x=
F
msin t
x2 x2 x=0
x p t x h t
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-6
3.1 Kraftanregung
– Die homogene Lösung hängt von den Anfangsbedingungen ab und klingt exponentiell mit der Zeit ab.
– Nach Beendigung des sogenannten Einschwingvorgangs kann die homogene Lösung gegenüber der partikulären Lö-sung vernachlässigt werden.
– Die partikuläre Lösung beschreibt den eingeschwungenen Zustand.
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-7
3.1 Kraftanregung
● Partikuläre Lösung:– Mit gilt:
– Dabei ist die statische Lösung.
– Lösungsansatz für die partikuläre Lösung:
m=c /2 F
m=
2 F
c=
2 x S
x S =F
c
x p t =As sin t Accos t x pt = Ascos t −Ac sin t
x pt =−2 As sin t Accos t
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-8
3.1 Kraftanregung
– Einsetzen in führt auf:
– Diese Gleichung ist nur dann für alle Zeitpunkte t erfüllt, wenn die Ausdrücke in den Klammern verschwinden. Daraus folgen 2 Gleichungen zur Ermittlung der beiden Konstanten A
s und A
c.
x2 x2 x=
2 xS sin t
−2 As sin t Accos t 2 As cos t −Ac sin t
2 As sin t Accos t =
2 x S sin t
−2 Ac2 As
2 Ac cos t
=2 As2 Ac−2 As
2 x S sin t
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-9
3.1 Kraftanregung
– Mit dem Frequenzverhältnis und dem Lehrschen Dämpfungsmaß folgt nach Division durch :
– Lösung mit der Cramerschen Regel:
=/
1−2 Ac 2D As = 0
−2D Ac 1−2 As = x S
D=/ 2
Ac=∣0 2D
x S 1−2∣
=−2D
x S , As=
∣1−2
−2D
0 x S ∣
=1−
2
x S
=∣ 1−2 2D
−2D 1−2∣=1−
2 24D22
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-10
3.1 Kraftanregung
– Die partikuläre Lösung ist eine harmonische Schwingung
mit der Amplitude
und dem Phasenwinkel
A= As2Ac
2= 1−
2 24D22
1−2 24D2
2x S=
xS
1−2 24D22
tan −=AcAs
=−2D
1−2
tan =2D
1−2
x pt =A sin t−
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-11
3.1 Kraftanregung
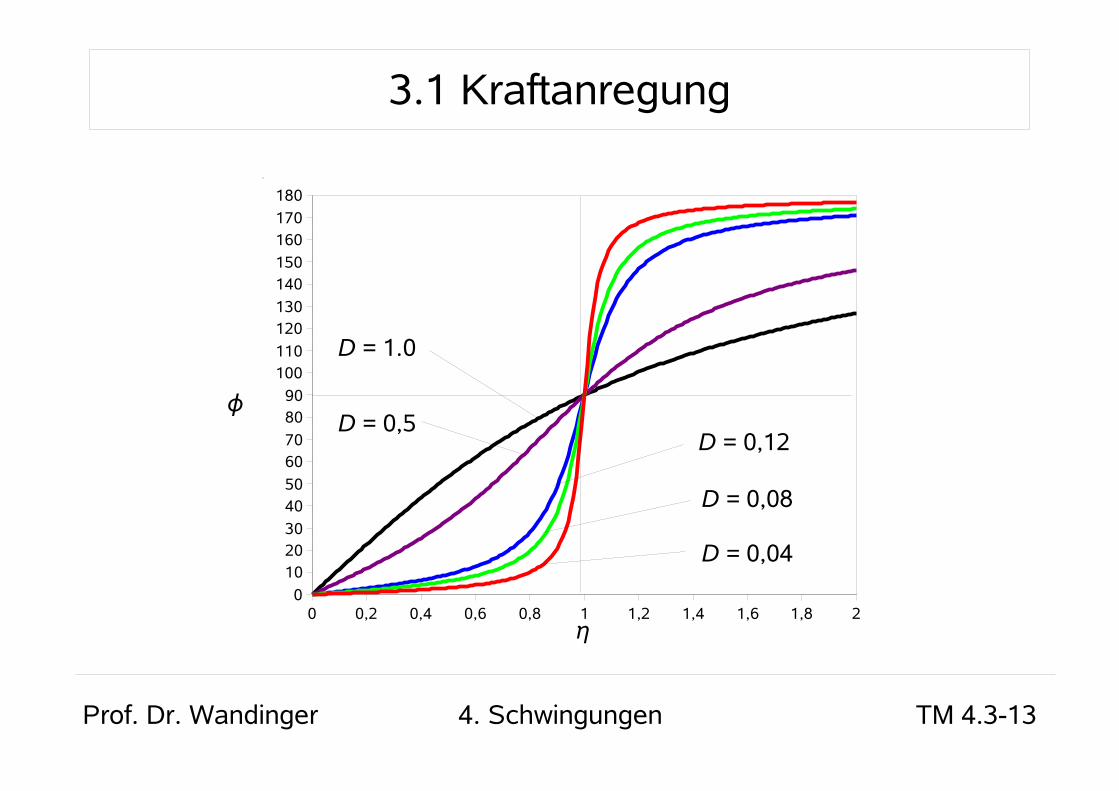
– Mit dem dynamische Überhöhungsfaktor
gilt:
V 1=1
1−2 24D
2
x p t ,=V 1 x S sin t−
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-12
3.1 Kraftanregung
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 20
1
2
3
4
5
6
7
8
9
10
11
12
13
η
V1
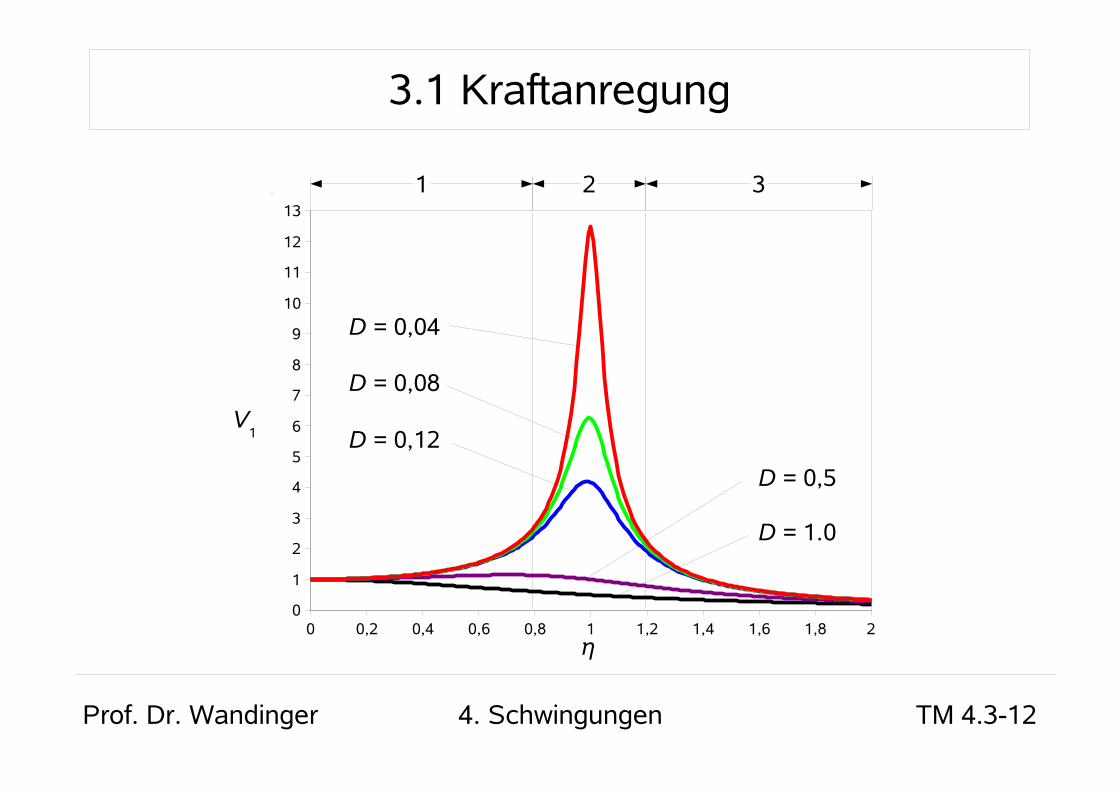
D = 0,04
D = 0,08
D = 0,12
D = 0,5
D = 1.0
1 2 3
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-13
3.1 Kraftanregung
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 20
102030
4050
6070
8090
100110
120130
140150
160170
180
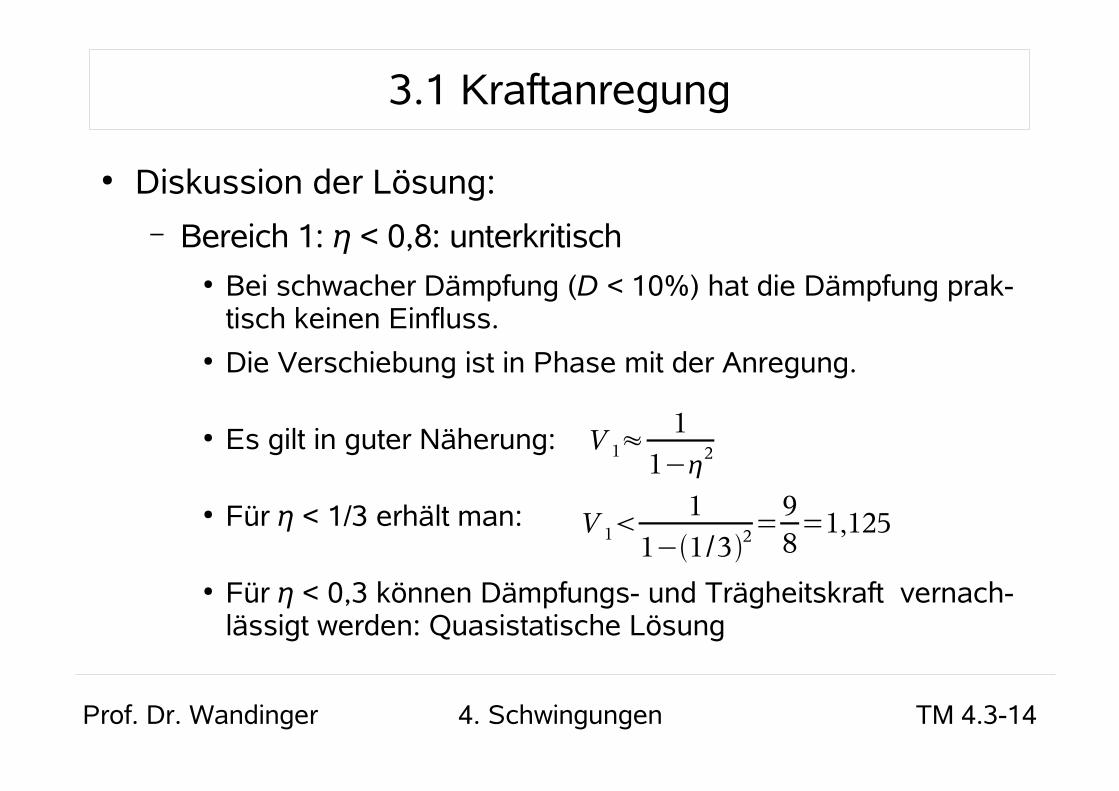
η
φ
D = 0,04
D = 0,08
D = 0,12D = 0,5
D = 1.0
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-14
3.1 Kraftanregung
● Diskussion der Lösung:– Bereich 1: η < 0,8: unterkritisch
● Bei schwacher Dämpfung (D < 10%) hat die Dämpfung prak-tisch keinen Einfluss.
● Die Verschiebung ist in Phase mit der Anregung.
● Es gilt in guter Näherung:
● Für η < 1/3 erhält man:
● Für η < 0,3 können Dämpfungs- und Trägheitskraft vernach-lässigt werden: Quasistatische Lösung
V 1≈1
1−2
V 11
1−1 /32=98=1,125
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-15
3.1 Kraftanregung
– Bereich 2: 0,8 < η < 1,2: kritisch● Dieser Bereich wird wesentlich von der Dämpfung beeinflusst.● Die Verschiebung hat eine Phasenverschiebung von 90°
gegenüber der Anregung.● Die Geschwindigkeit ist in Phase mit der Anregung.● Trägheits- und Federkraft sind im Gleichgewicht. Die
Anregung ist im Gleichgewicht mit der Dämpfungskraft.● Den Zustand η = 1 nennt man Resonanz.● Bei η = 1 sind Federkraft und Trägheitskraft entgegengesetzt
gleich groß.
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-16
3.1 Kraftanregung
– Bereich 3: η > 1,2: überkritisch● Bei schwacher Dämpfung (D < 10%) hat die Dämpfung
praktisch keinen Einfluss.● Die Verschiebung hat eine Phasenverschiebung von 180°
gegenüber der Anregung.● Die Beschleunigung ist in Phase mit der Anregung.● Es gilt in guter Näherung:
● Für η > 3 erhält man:
● Für η > 3 ist die Trägheitskraft groß gegenüber der Feder- und der Dämpferkraft.
V 1≈1
2−1
V 119−1
=18=0,125
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-17
3.1 Kraftanregung
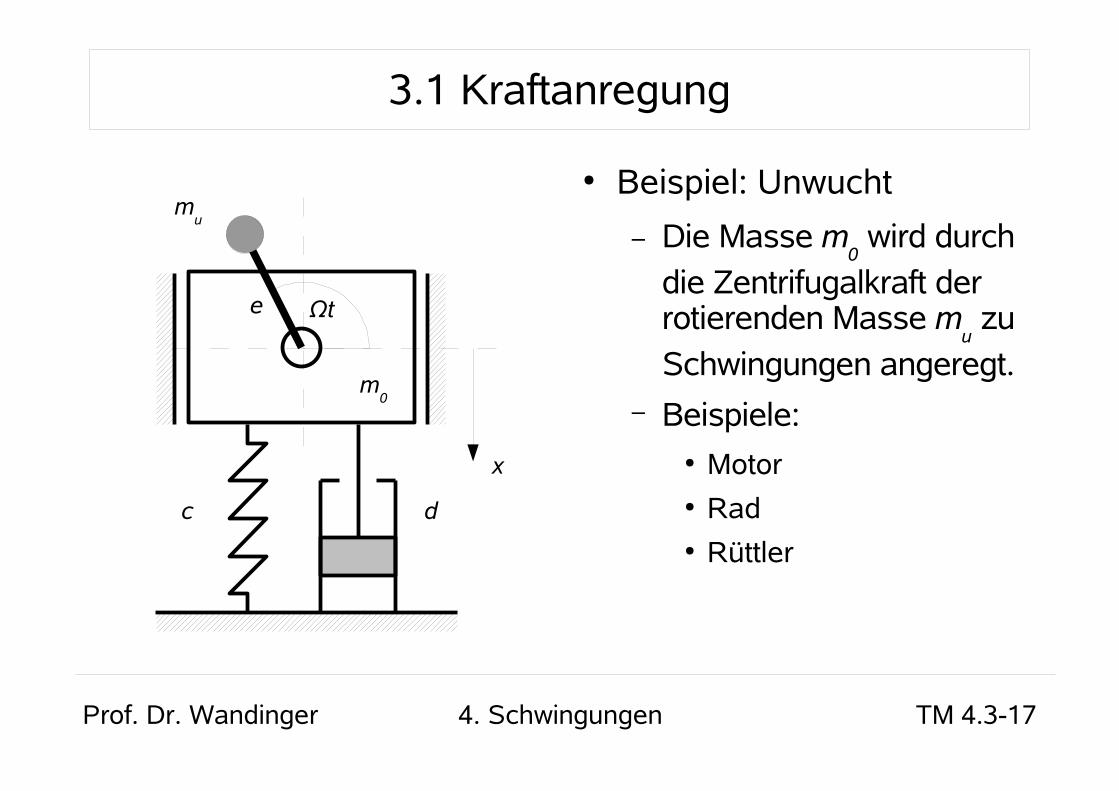
● Beispiel: Unwucht
– Die Masse m0 wird durch
die Zentrifugalkraft der rotierenden Masse m
u zu
Schwingungen angeregt.– Beispiele:
● Motor● Rad● Rüttler
m0
c d
x
Ωte
mu
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-18
3.1 Kraftanregung
FC
FD
S
S
S sin(Ωt)
Ωt
x
m0
mu
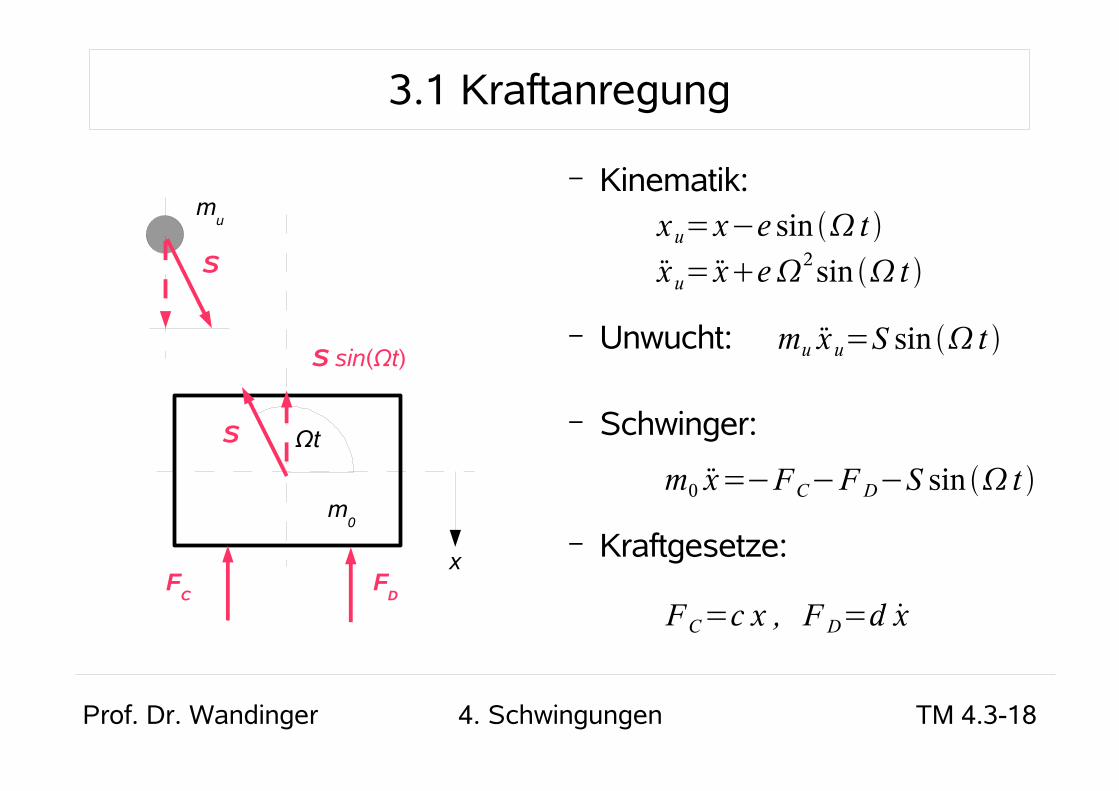
– Kinematik:
– Unwucht:
– Schwinger:
– Kraftgesetze:
x u=x−e sin t
x u= xe2sin t
mu x u=S sin t
m0 x=−FC−F D−S sin t
FC=c x , F D=d x
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-19
3.1 Kraftanregung
– Einsetzen ergibt:
– Der Schwinger wird also durch die Kraft angeregt.
– Division durch die Gesamtmasse ergibt:
– Dabei ist
die statische Verschiebung.
m0mu xd xc x=−mue2sin t
F =−mue2
m=m0mu
x2 x2 x=−
mume2sin t =
2 xS sin t
x S =−mue
c2=−
mu e2
m2=−
mume2
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-20
3.1 Kraftanregung
– Die partikuläre Lösung lautet also
mit
und
x p t ,=−2V 1
mume sin t−
=−V 3mume sin t−
V 3=2V 1
tan =2D
1−2
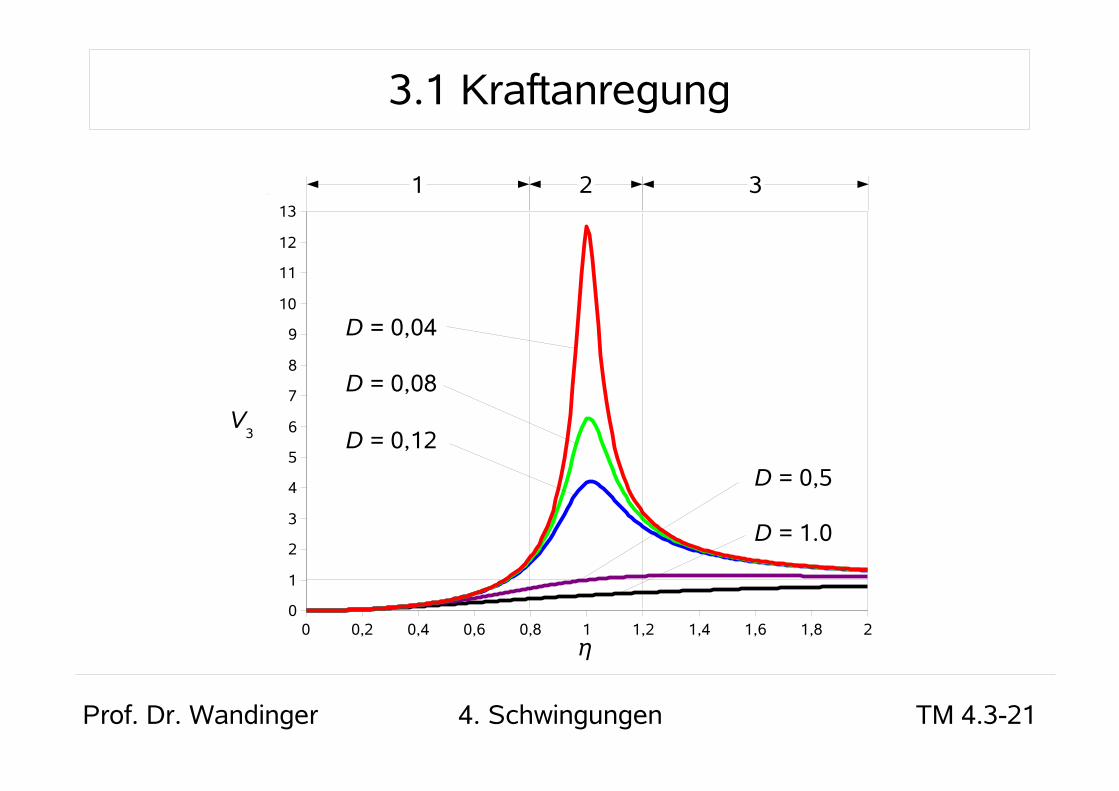
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-21
3.1 Kraftanregung
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 20
1
2
3
4
5
6
7
8
9
10
11
12
13
η
V3
D = 0,04
D = 0,08
D = 0,12
D = 0,5
D = 1.0
1 2 3
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-22
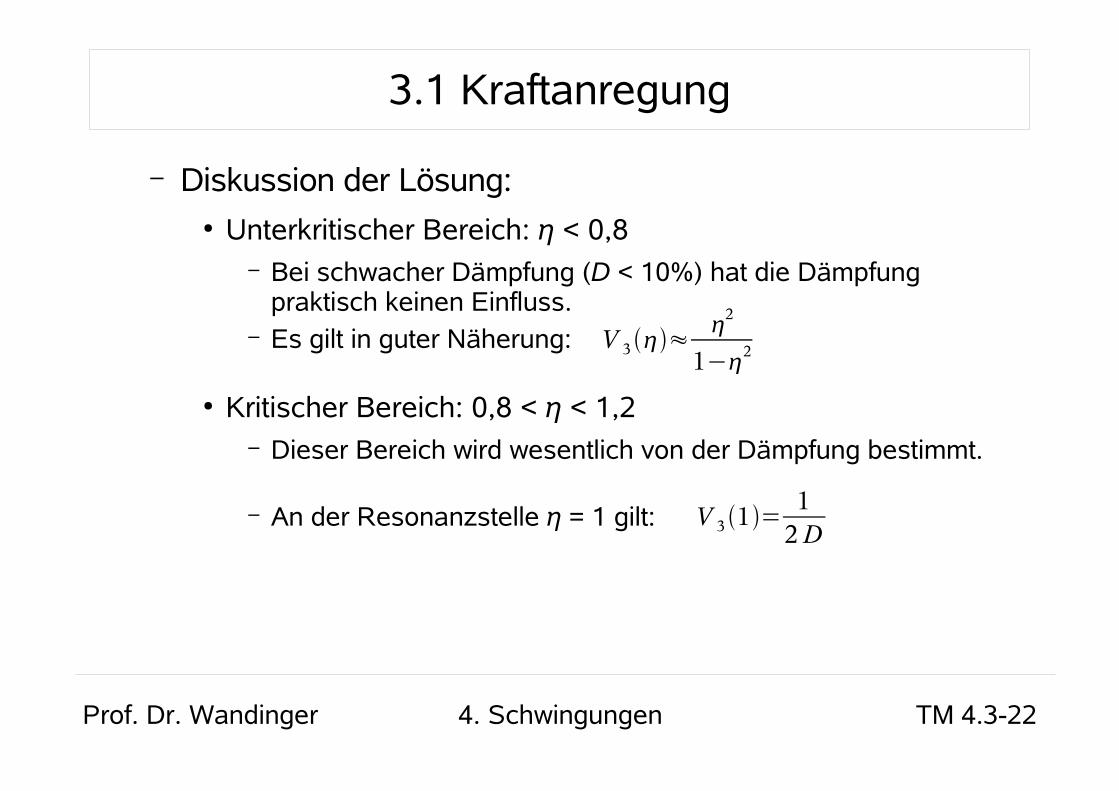
3.1 Kraftanregung
– Diskussion der Lösung:● Unterkritischer Bereich: η < 0,8
– Bei schwacher Dämpfung (D < 10%) hat die Dämpfung praktisch keinen Einfluss.
– Es gilt in guter Näherung:
● Kritischer Bereich: 0,8 < η < 1,2– Dieser Bereich wird wesentlich von der Dämpfung bestimmt.
– An der Resonanzstelle η = 1 gilt:
V 3 ≈2
1−2
V 3 1=12D
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-23
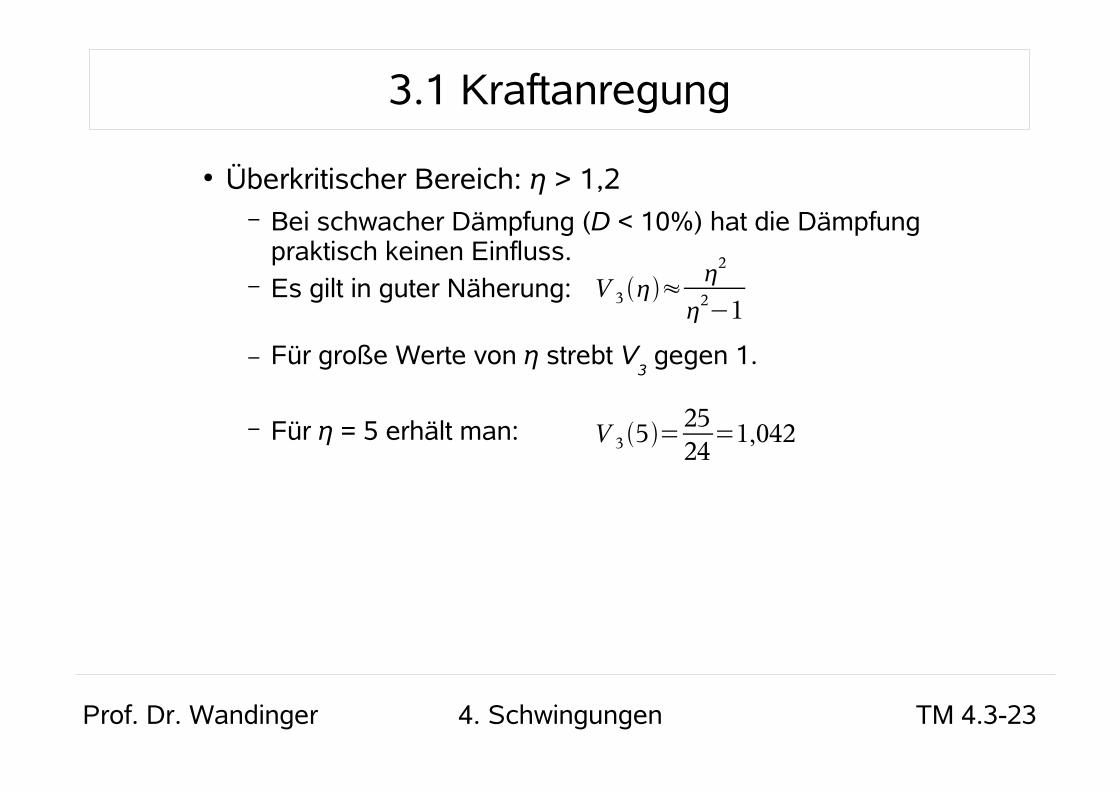
3.1 Kraftanregung
● Überkritischer Bereich: η > 1,2– Bei schwacher Dämpfung (D < 10%) hat die Dämpfung
praktisch keinen Einfluss.– Es gilt in guter Näherung:
– Für große Werte von η strebt V3 gegen 1.
– Für η = 5 erhält man:
V 3 ≈2
2−1
V 3 5=2524
=1,042
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-24
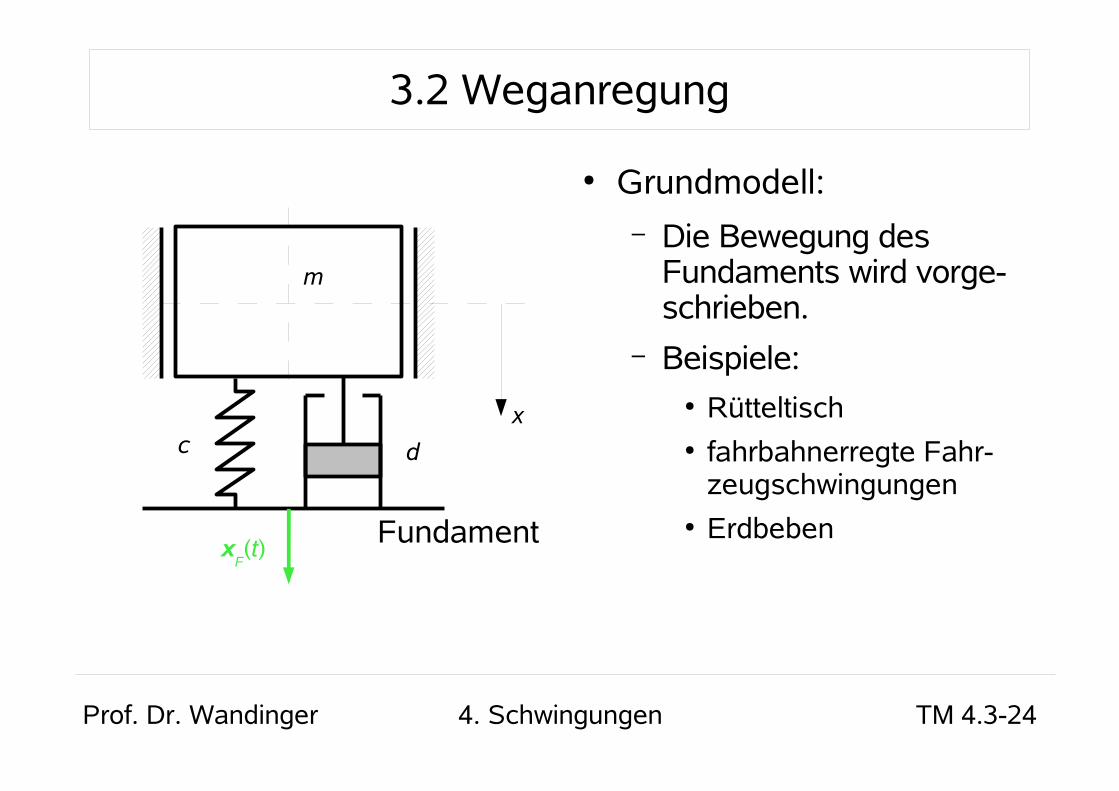
3.2 Weganregung
● Grundmodell:– Die Bewegung des
Fundaments wird vorge-schrieben.
– Beispiele:● Rütteltisch● fahrbahnerregte Fahr-
zeugschwingungen● Erdbeben
m
c d
x
xF(t)
Fundament
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-25
3.2 Weganregung
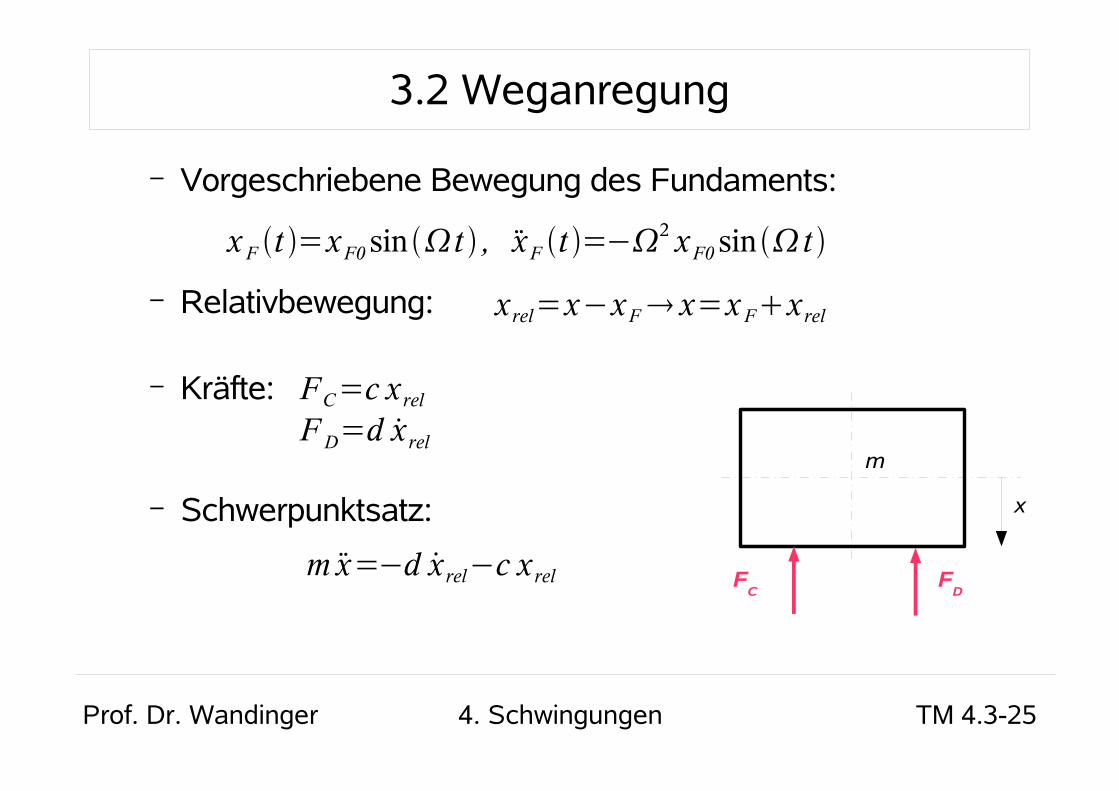
– Vorgeschriebene Bewegung des Fundaments:
– Relativbewegung:
– Kräfte:
– Schwerpunktsatz:
FC
FD
m
x
x F t =xF0 sin t , xF t =−2 xF0 sin t
x rel=x−xF x=x Fx rel
FC=c x relFD=d x rel
m x=−d x rel−c x rel
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-26
3.2 Weganregung
– Mit
folgt:
– Division durch m führt auf
mit
– Damit gilt für die Relativverschiebung:
m x reld x relc x rel=−m xF=mxF02sin t
x rel2 x rel2 xrel=x F0
2sin t =2 x S sin t
x= xF x rel
x S =x F0
2
=xF02
x prel t ,=x F02V 1sin t− =xF0V 3sin t−
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-27
3.2 Weganregung
– Für die Absolutverschiebung folgt:
– Die Amplitude ist:
x p , t =xF , t x rel , t =xF0 sin t xF0V 3sin t−
=xF0 [sin t V 3 sin t cos−cos t sin ]=xF0 [ 1V 3cos sin t −V 3sincos t ]
x pmax =xF0 1V 3cos2V 3
2sin2
=xF0 1V 322V 3cos
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-28
3.2 Weganregung
● Diskussion der Lösung:– Tiefer unterkritischer Bereich:
● Die Relativverschiebung ist vernachlässigbar klein.● Die Masse folgt der Bewegung des Fundaments.
0,3
V 30,32
1−0,320,1
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-29
3.2 Weganregung
– Hoher überkritischer Bereich:
● Der Überhöhungsfaktor ist nahezu 1.● Der Phasenwinkel ist nahezu 180°.● Die Relativverschiebung ist entgegengesetzt gleich groß wie
die Verschiebung des Fundaments● Die Absolutverschiebung der Masse geht gegen Null.
4
V 342
42−11,1
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-30
3.2 Weganregung
● Bei Vernachlässigung der Dämpfung gelten folgende Vereinfachungen:– Überhöhungsfaktor:
– Phasenwinkel:
– Absolutverschiebung:
V 3=2
∣1−2∣
={ 0° für 1180 ° für 1
x p t ,={x F0 1V 3 sin t für 1
x F0 1−V 3 sin t für 1
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-31
3.2 Weganregung
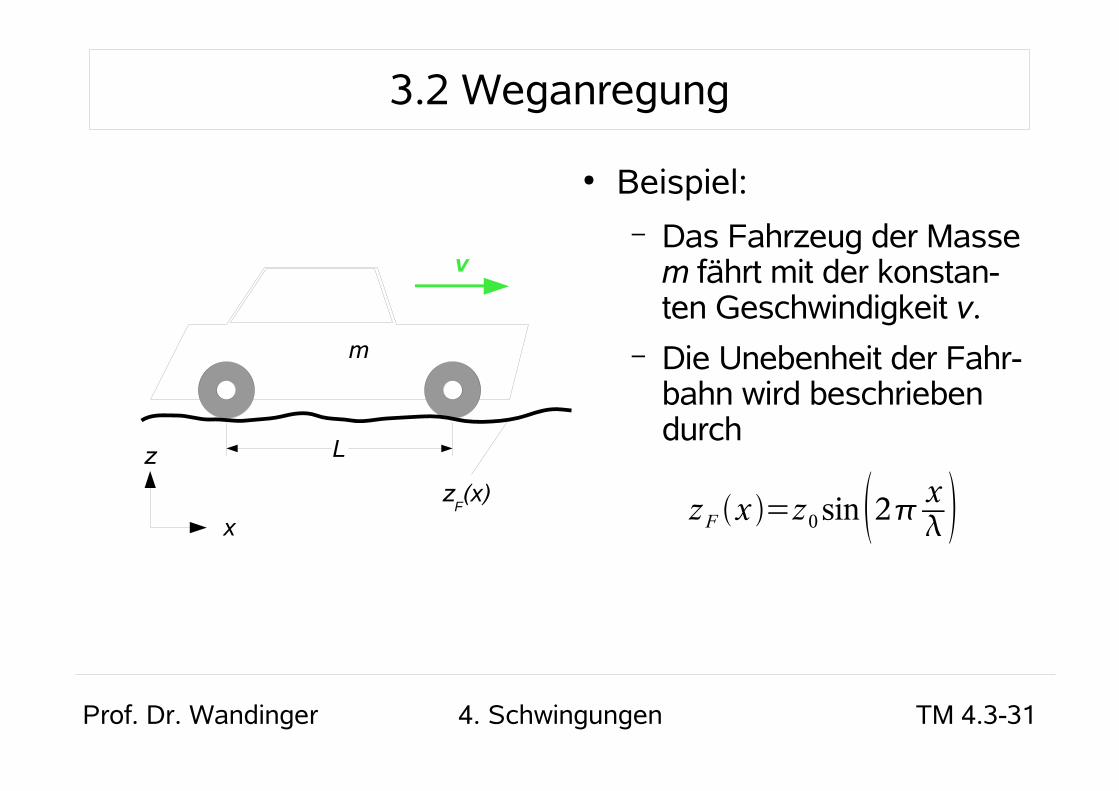
● Beispiel:– Das Fahrzeug der Masse
m fährt mit der konstanten Geschwindigkeit v.
– Die Unebenheit der Fahr-bahn wird beschrieben durch
x
z
m
L
zF(x)
v
zF x =z0sin 2 x
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-32
3.2 Weganregung
– Gesucht:● Relative und absolute Verschiebungsamplitude der vertikalen
Hubschwingung● Absolute Beschleunigungsamplitude der vertikalen Hub-
schwingung– Daten:
● Masse m = 1500kg, Federsteifigkeit c = 1,5∙105N/m● Lehrsches Dämpfungsmaß D = 20%● Geschwindigkeit v = 30m/s
● Wellenlänge λ = 60m, Amplitude z0 = 0,1m
● Radabstand L = 2,5m
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-33
3.2 Weganregung
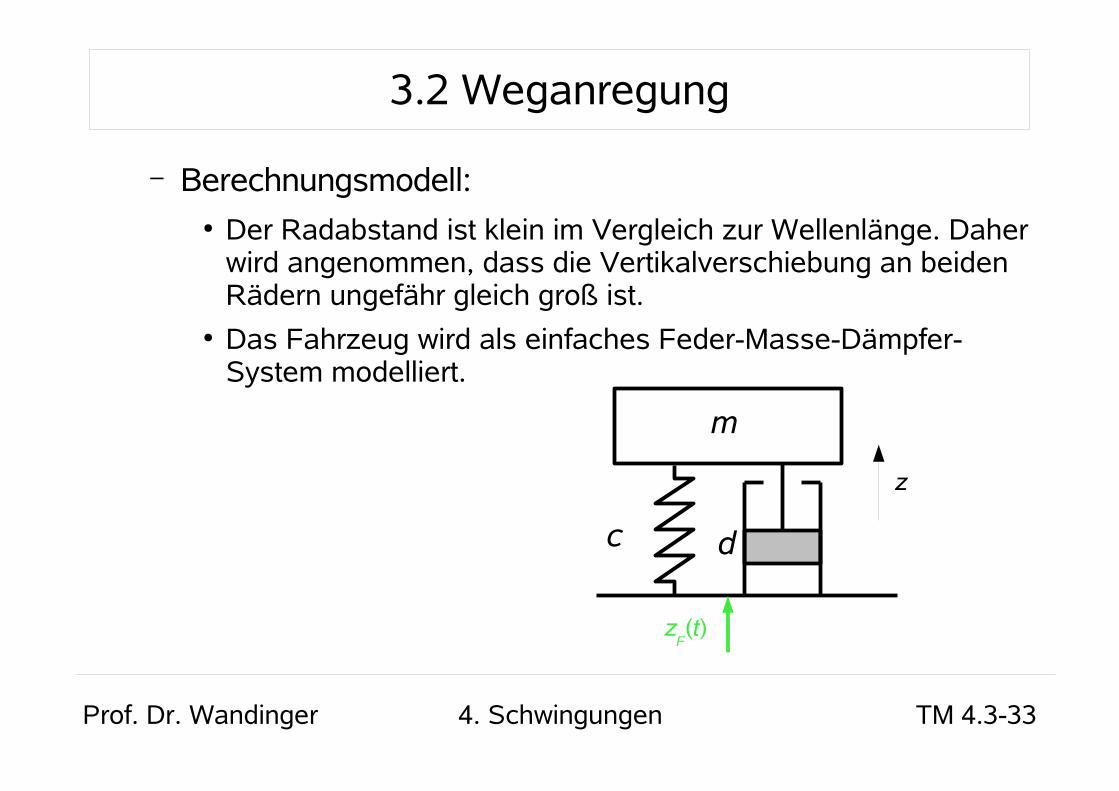
– Berechnungsmodell:● Der Radabstand ist klein im Vergleich zur Wellenlänge. Daher
wird angenommen, dass die Vertikalverschiebung an beiden Rädern ungefähr gleich groß ist.
● Das Fahrzeug wird als einfaches Feder-Masse-Dämpfer-System modelliert.
m
c d
zF(t)
z
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-34
3.2 Weganregung
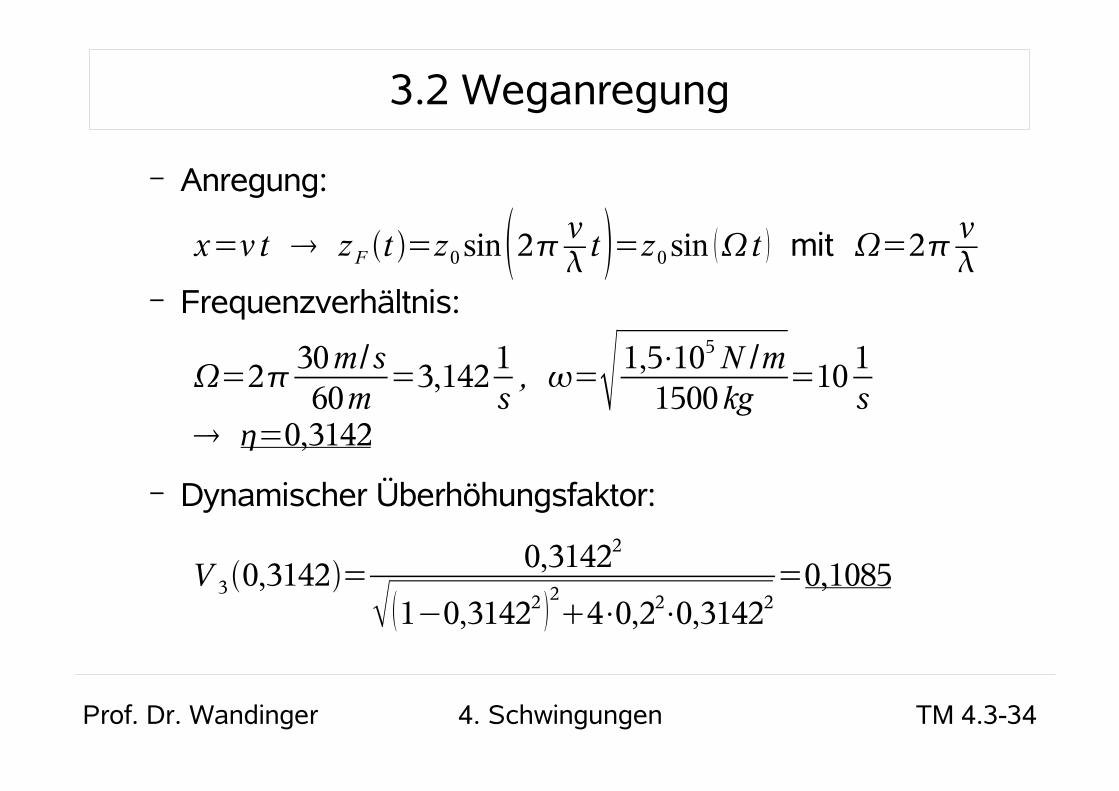
– Anregung:
– Frequenzverhältnis:
– Dynamischer Überhöhungsfaktor:
x=v t zF t =z0sin 2 v t =z0sin t mit =2 v
=230m/ s60m
=3,1421s, =
1,5⋅105N /m1500kg
=101s
=0,3142
V 30,3142=0,31422
1−0,31422 24⋅0,22⋅0,31422
=0,1085
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-35
3.2 Weganregung
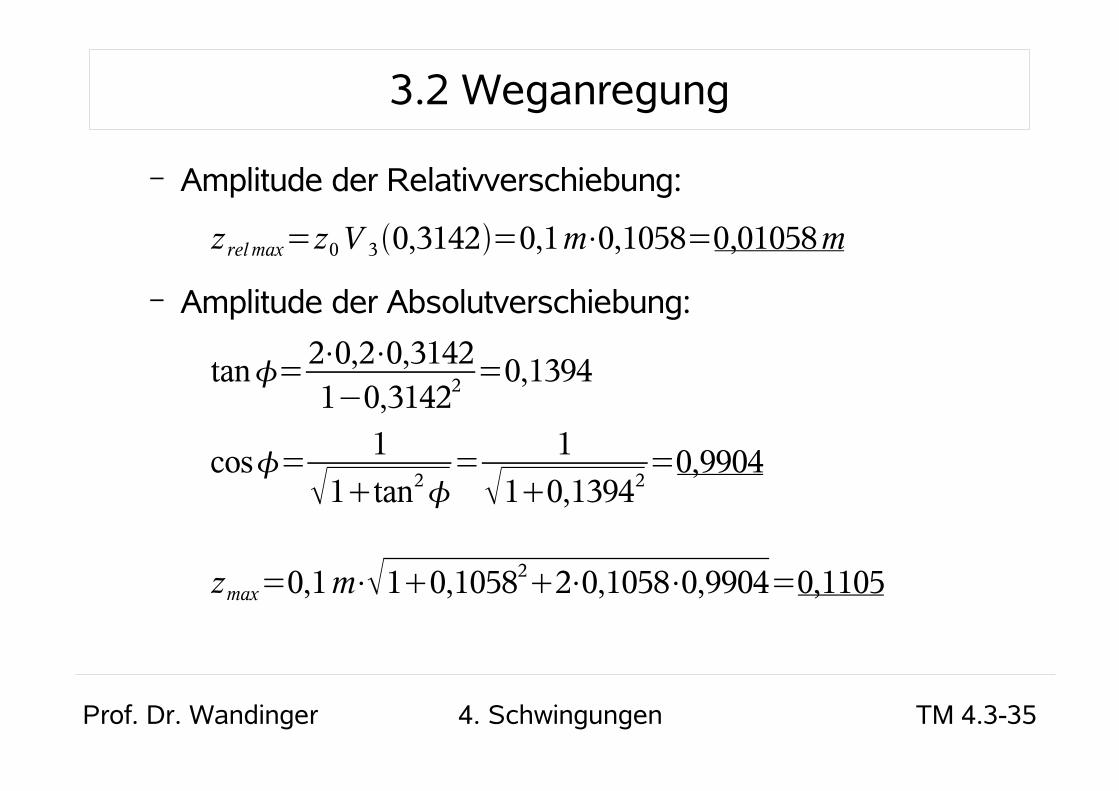
– Amplitude der Relativverschiebung:
– Amplitude der Absolutverschiebung:
z relmax=z0V 30,3142=0,1m⋅0,1058=0,01058m
tan=2⋅0,2⋅0,31421−0,31422
=0,1394
cos= 1
1tan2=
1
10,13942=0,9904
zmax=0,1m⋅10,105822⋅0,1058⋅0,9904=0,1105
Prof. Dr. Wandinger 4. Schwingungen TM 4.3-36
3.2 Weganregung
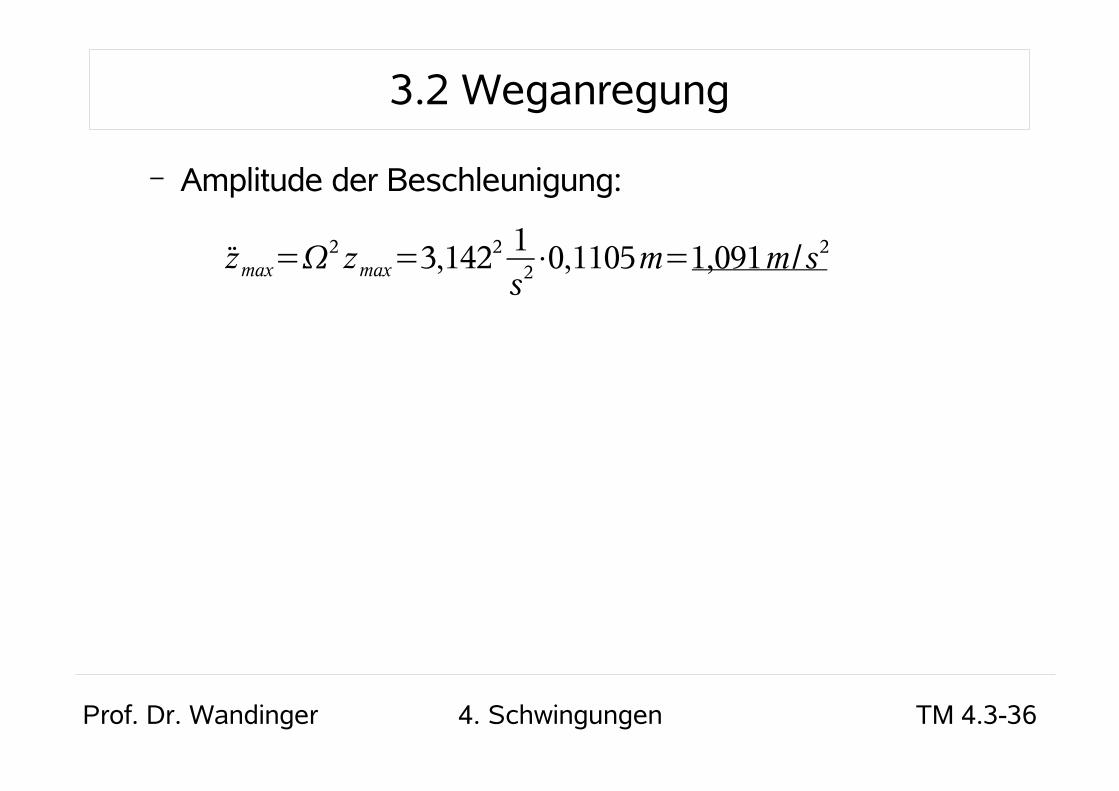
– Amplitude der Beschleunigung:
zmax=2 zmax=3,142
2 1s2⋅0,1105m=1,091m/ s2