komutların İşlem süresi -...
TRANSCRIPT

Komutların İşlem Süresi
Hazırlayan: Dr.Bülent ÇOBANOĞLU 1
PIC’lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili
komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
çekerken şart sağladığı durumda 2 saat saykılı çeker

PIC’in Bir Komutu İşleme Süresi
Örnek 1: a) 10 MHz b) 16MHz c) 4 MHz saat frekansına sahip PIC MCU için bir komutu işlemesüresi kaç sn dir. ( Farzedinki frekans ön bölücü değerleri yoktur.)
Çözüm:
Örnek 2: a) 10 MHz b) 16MHz saat frekansına sahip PIC MCU için bir komutu işleme işleme süresikaç sn dir. ( Farzedinki frekans ön bölücü değeri 1/64 )
Çözüm:
YRD.DOC.Dr.BÜLENT ÇOBANOĞLUNot: Komutların işlem süresi MPLAB simülatöründe Stopwatch ile izlenebilir.

Hazırlayan: Dr.Bülent ÇOBANOĞLU3
KARŞILAŞTIRMA KOMUTLARI İLE TEKRARLI İŞLEMLER (SUBWF, SUBLW KOMUTLARI)

Hazırlayan: Dr.Bülent ÇOBANOĞLU 4
;O dan 9 a ARTAN SAYICI
LIST P=16F877
#INCLUDE<P16F877.INC>
SAYAC EQU 20H ;16F84 İÇİN 0CH OLACAK
CLRF PORTB ;PORTB temizlenir
BSF STATUS, 5 ;BANK1’e geçilir
CLRF TRISB ;PORTB nin tüm uçları çıkış olacaktır
BCF STATUS, 5 ;BANK0’a geçilir
CLRF SAYAC
DON:
MOVF SAYAC,W
MOVWF PORTB
INCF SAYAC,F
MOVLW .10
SUBWF SAYAC,W
BTFSS STATUS,Z
GOTO DON
SON
GOTO SON
END
Aşağıdaki program kaç saat saykılında çalışır? Ve 4MHz lik bir MCU için çalışma süresini hesaplayınız?
1
1
1
1
1
1
2
1
1
1
1
1
TG= Donguİci*Sayac+DonguDisi=
=8*10+5+1=86 saykıl

Gecikme Programları: 4Mhz, 1 msn lik gecikme
YRD.DOC.Dr.BÜLENT ÇOBANOĞLU

Gecikme Programları
Örnek 2: Tek bir döngü ile yaklaşık 1000 saykıllık bir gecikme sağlayacak programı yazınız.
Çözüm: Toplam Gecikme= Döngü dışındakiler + SAYAC* Döngü içindekiler = 1+1+ (249*4) + 2+1=1001 saykıl
Tabii 1000 saykıllık gecikme programının ne kadar sürelik bekleme sağlayacağı PIC mikro denetleyicinin çalışmafrekansına bağlıdır. 4 MHz lik PIC MCU için toplam gecikme; 1000*1/4µS*4=1000µS=1msn lik bir gecikmesağlayacaktır.
BEKLE
MOVLW d’249’ ;1 saykıl
MOVWF SAYAC ;+1 saykıl
DON
NOP ;+1*249
DECFSZ SAYAC, F ;+1*249 +(1)
GOTO DON ;+2*248
RETURN ;+2
TG=249+249+2*248+3+2(RETURN)+2(CALL)= 1001 saykıl
Hazırlayan: Dr.Bülent ÇOBANOĞLU 6

Gecikme Programları: 4Mhz, 100 msn lik gecikme
YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
Hazırlayan: Dr.Bülent ÇOBANOĞLU 8
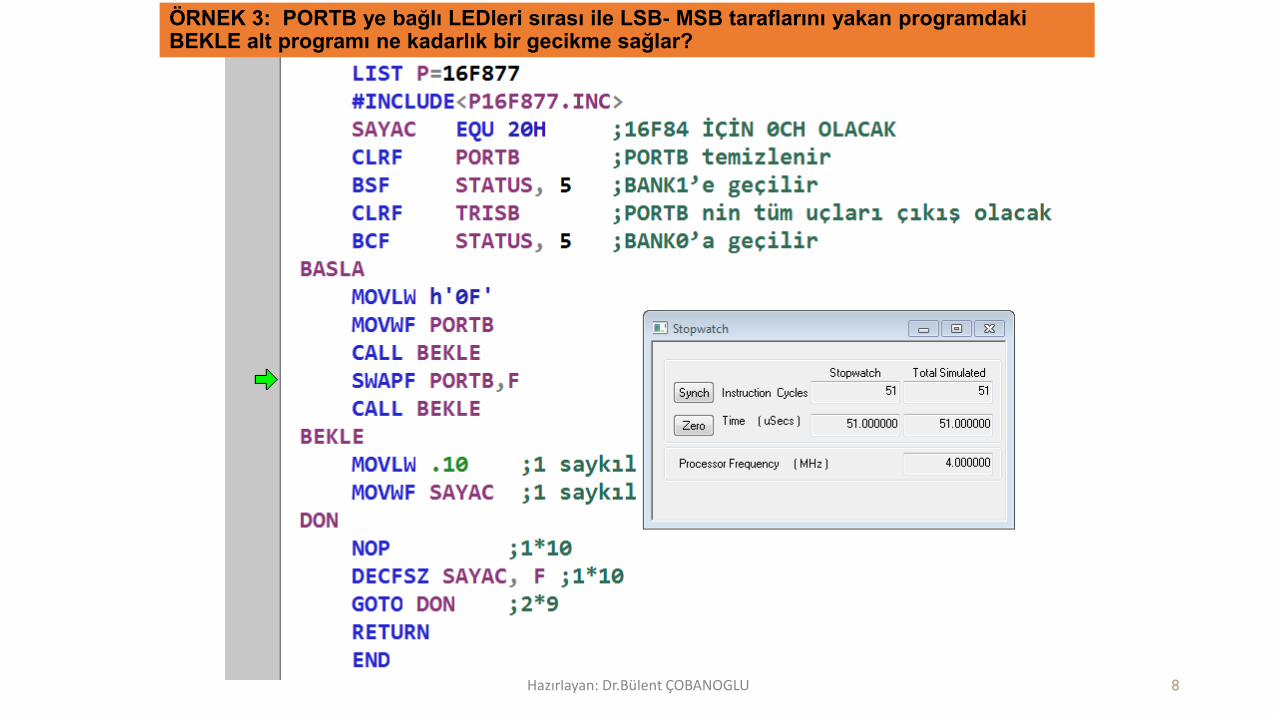
ÖRNEK 3: PORTB ye bağlı LEDleri sırası ile LSB- MSB taraflarını yakan programdaki BEKLE alt programı ne kadarlık bir gecikme sağlar?
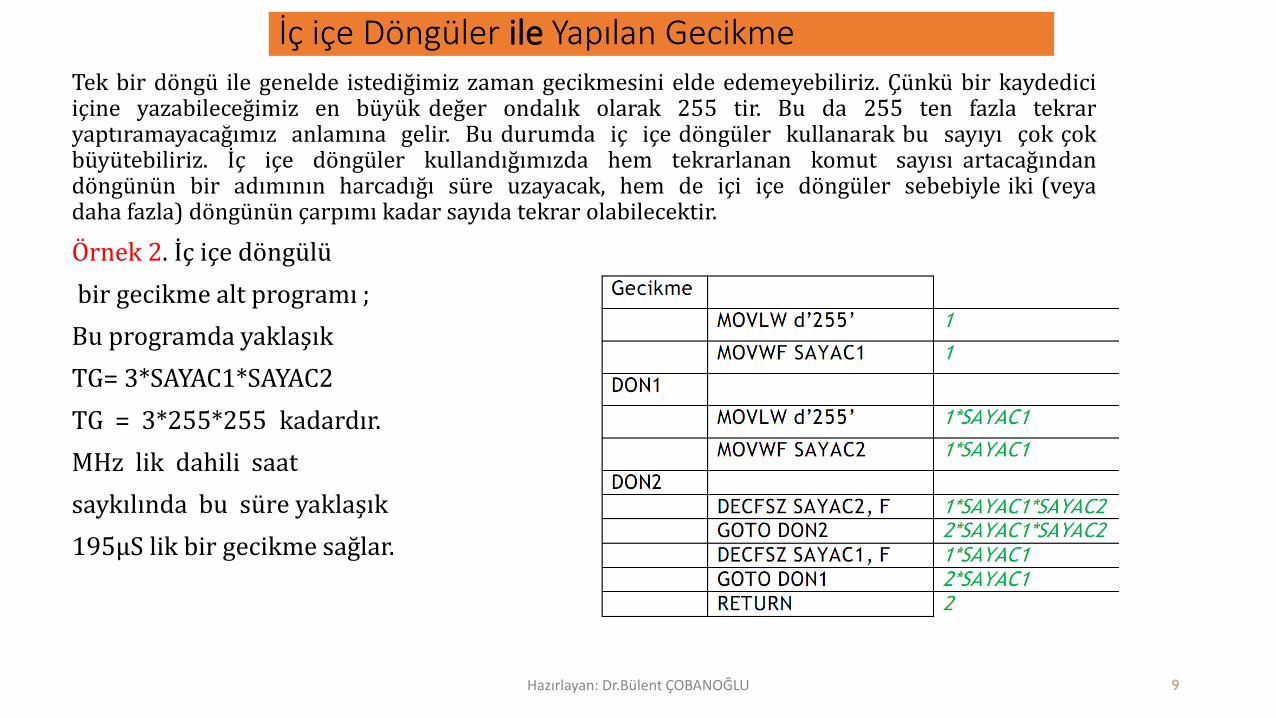
İç içe Döngüler ile Yapılan GecikmeTek bir döngü ile genelde istediğimiz zaman gecikmesini elde edemeyebiliriz. Çünkü bir kaydediciiçine yazabileceğimiz en büyük değer ondalık olarak 255 tir. Bu da 255 ten fazla tekraryaptıramayacağımız anlamına gelir. Bu durumda iç içe döngüler kullanarak bu sayıyı çok çokbüyütebiliriz. İç içe döngüler kullandığımızda hem tekrarlanan komut sayısı artacağındandöngünün bir adımının harcadığı süre uzayacak, hem de içi içe döngüler sebebiyle iki (veyadaha fazla) döngünün çarpımı kadar sayıda tekrar olabilecektir.
Örnek 2. İç içe döngülü
bir gecikme alt programı ;
Bu programda yaklaşık
TG= 3*SAYAC1*SAYAC2
TG = 3*255*255 kadardır.
MHz lik dahili saat
saykılında bu süre yaklaşık
195µS lik bir gecikme sağlar.
Hazırlayan: Dr.Bülent ÇOBANOĞLU 9

İç içe döngülü gecikme Programı: 4Mhz, 1 Dakikalık gecikme
YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
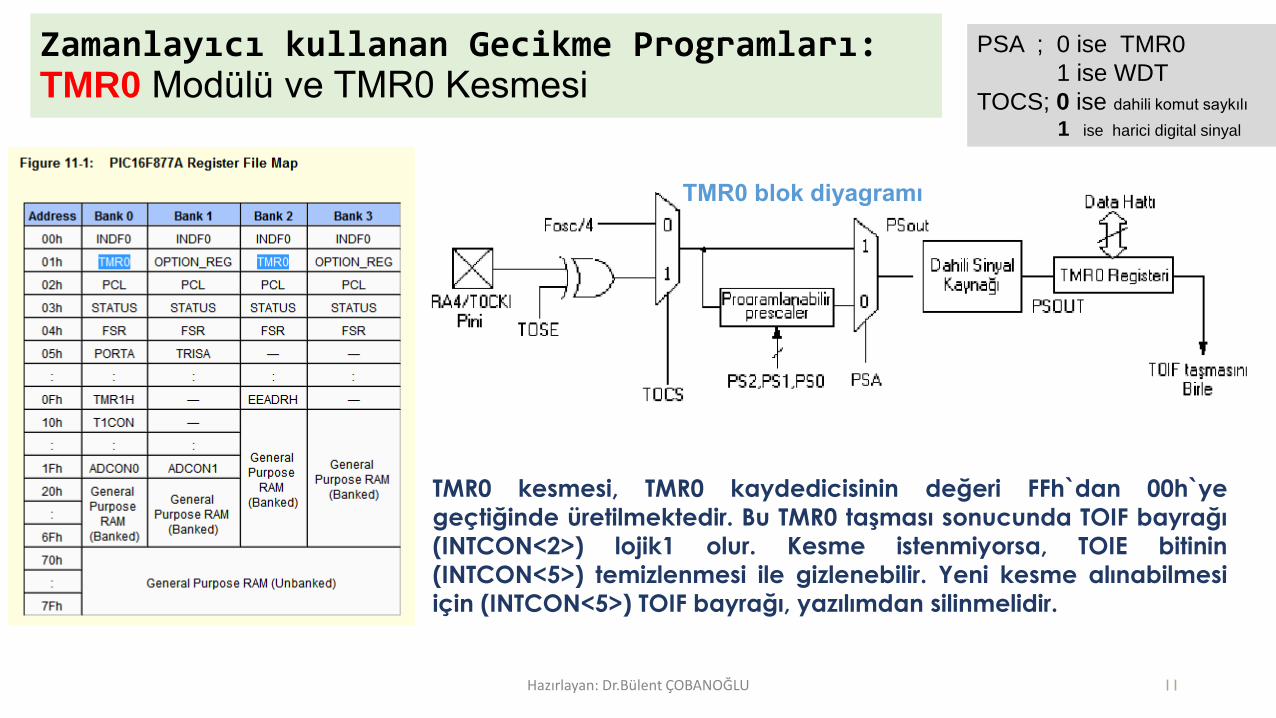
Zamanlayıcı kullanan Gecikme Programları:TMR0 Modülü ve TMR0 Kesmesi
Hazırlayan: Dr.Bülent ÇOBANOĞLU 11
PSA ; 0 ise TMR0
1 ise WDT
TOCS; 0 ise dahili komut saykılı
1 ise harici digital sinyal
TMR0 kesmesi, TMR0 kaydedicisinin değeri FFh`dan 00h`ye
geçtiğinde üretilmektedir. Bu TMR0 taşması sonucunda TOIF bayrağı
(INTCON<2>) lojik1 olur. Kesme istenmiyorsa, TOIE bitinin
(INTCON<5>) temizlenmesi ile gizlenebilir. Yeni kesme alınabilmesi
için (INTCON<5>) TOIF bayrağı, yazılımdan silinmelidir.
TMR0 blok diyagramı

Hazırlayan: Dr.Bülent ÇOBANOĞLU 12
TMR0 Donanımsal Yapısı
Timer0 (TMR0) modülü timer/sayaç aşağıdaki özelliklere sahiptir. • 8 bitlik dir. • Okunabilir ve yazılabilir , • 8 bitlik programlanabilir prescaler., • Dahili veya harici saat ayarı , • FFh` tan 00h`ye taşma üzeri kesme , • Dış saatin kenar seçimi ,

Timer modu; TOCS biti (OPTION<5>) biti lojik 0 atandığında TMR0 kaydedicinin içeriği dahili
osilatör frekansı ile artar. Eğer temizlenmesiyle seçilir. Timer modunda Timer0 modülü her
bir komut sürecini uzatır. Eğer, Sayaç modu kullanılacaksa TOCS biti (OPTION<5>) lojik 1
olarak atanır ve RA4 girişinden dışarıdan gelen değişim ile TMR0 kaydedici içeriği artar. Bu
modda, artım için yükselen ve düşen kenar tetiklemesi TOSE (OPTION<4>) tarafından
belirlenmektedir. TOSE bitinin temizlenmesi ile yükselen sınırları seçilmiş olunur.
TMR0 kesmesi, TMR0 kaydedicisinin değeri FFh`dan 00h`ye geçtiğinde
üretilmektedir. Bu TMR0 taşması sonucunda TOIF bayrağı (INTCON<2>) lojik1
olur. Kesme istenmiyorsa, TOIE bitinin (INTCON<5>) temizlenmesi ile
gizlenebilir. Yeni kesme alınabilmesi için (INTCON<5>) TOIF bayrağı,
yazılımdan silinmelidir.
Timer 0 ile ilgili Kaydediciler

TMR0 Frekans ÖnBölücü(PreScaler) Ayarları
14
Bit 3 PSA: Önbölücü / önölçekleme yapılacak birimi seçme biti
0 = Önbölücü TMR0 modülü için ayrılır
1 = Önbölücü WDT için ayrılır.
Bit 2,1,0; PS2, PS1, PS0: Önbölücü oranı seçme bitleri
OPTION_REG
OPTION_REG Kaydedici bitleri
•Bit 5 TOCS: TMR0 saat kaynağını seçme biti
•0 = Dahili komut çevrim saati kullanılır (CLKOUT)
•1 = RA4/TOCK1 pininden (uçundan) gelen darbeler saat kaynağı
olurak kullanılır.
•Bit 4 TOSE: TMR0 kaynak kenarı seçme biti (Eğer TOCS = 1 ise)
•0 = RA4/TOCK1 pininden gelen her yükselen kenar için bir artırılır
•1 = RA4/TOCK1 pininden gelen her düşen kenar için bir artırılır.
MOVLW b’11010111’; TMRO, dahili sinyal kaynağı ve prescaler:111 seçMOVWF OPTION_REG

TMR0 ile GecikmeTMR0 sayıcısının FF (255) den 00 ‘a geçmesi TMR0 kesmesine sebep olur ve bu kesme sonucunda
INTCON kesme kaydedicisinin 2. (T0IF) biti 1 değerini alır. Bu kesmeyi kullanabilmek için daha öncesinde INTCON kaydedicisinin TOIE bitinin 1 yapılarak kesmeye izin verilmesi gerektiği unutulmamalıdır.
Kesme gecikmesi (Overflow time)= 4 *TOSC * Prescaler *(256 – TMR0 başlangıç değeri)
• Bu formülden TMR0 başlangıç değeri de çekilebilir. O zaman
TMR0 = 256 – (Gecikme zamanı)/(4 *TOSC* Prescaler)
Hazırlayan: Dr.Bülent ÇOBANOĞLU 15

TMR0 Kesme GecikmesiTMR0 sayıcısı h’00’ değeri yerine istenilen bir sayıdan başlatılabilir.
Kesme Gecikme Süresi=Tkomut zamanı(4 *TOSC )*Prescaler değeri*(256-TMR0 başlangıç sayısı)
Formülü ile istenilen geçikme süresi hesaplanabilir. Formülde TMR0 başlangıç sayısı ve Prescaler değeri ondalık olarak alınmalıdır.
TMR0 ile elde edilebilen en büyük kesme gecikme süresi (PS0-PS2:’111’ seçilirse) ve Fosc=4MHz ise ; Tkomut zamanı=1/(fosc/4)=1µs bulunur.
Kesme Gecikme Süresi= Tkomut zamanı*Prescaler değeri*(256-TMR0 başlangıç sayısı)
= 1µs*256*(256-0)
= 65536µs = 65,5 ms olur.
1 ms zaman gecikmesi için:
Kesme Gecikme Süresi= Tkomut zamanı*Prescaler değeri*(256-TMR0 başlangıç sayısı)
= 1µs*8*(256-131)
= 1000µs = 1 ms olur.Hazırlayan: Dr.Bülent ÇOBANOĞLU 16

TMR0 Gecikme Alt programı
MOVLW b’11010111’ ;TMR0, DAHİLİ SİNYAL,1:256
MOVWF OPTION_REG
…
GECIKME
CLRF TMR0
DON
BTFSS INTCON, TOIF
GOTO DON
BCF INTCON, TOIF
RETURN
Hazırlayan: Dr.Bülent ÇOBANOĞLU 17
Örnek 7:
Osilatör frekansı 4MHz olan bir PIC için, OPTION kaydedicisindeki PS2, PS1, PS0 bitlerinin değerleri sırasıyla b’111’ şek
lindedir. TMR0 zamanlayıcısının sıfır(0) değerinden saymaya başladığı kabulü ile bu PIC
kaç saniye sonra TMR0 tarafından bir kesme oluşturur?
Çözüm:
4 MHz saat frekansı ise peryot , TOSC =1/fosc =0.25 µs
PS2:PS0 = “111” olduğundan Prescaler= 1:256
Kesme gecikmesi = 4 *TOSC * Prescaler *(256 – TMR0 başlangıç değeri)
Kesme gecikmesi (Overflow time) = 4 *0.25 µs * 256 *(256 – 0)
= 65536 µs =65.536ms

Örnek-8: 4 Bitlik Binary(ikili) Geri Sayıcı(15-0) Uygulaması
Hazırlayan: Dr.Bülent ÇOBANOĞLU18
LIST P=16F877A#INCLUDE<P16F877A.INC>ORG 0X00GOTO ANA
ANACLRF PORTB ;PORTB temizlenirBSF STATUS, 5 ;BANK1’e geçilirMOVLW b'11010111' ;TMR0, DAHİLİ SİNYAL,1:256MOVWF OPTION_REGCLRF TRISB ;PORTB nin tüm uçları çıkış
olacaktırBCF STATUS, 5 ;BANK0’a geçilir
EnBasaMOVLW d'16'MOVWF PORTB
SayCALL BEKLE ;65,53msCALL BEKLE ;65,53+65,53=131ms lik gecikmeDECFSZ PORTB,F ;PORTB--GOTO Say ;TekrarlaGOTO EnBasa
BEKLE: ;gecikme alt programıCLRF TMR0
DONBTFSS INTCON,T0IFGOTO DONBCF INTCON,T0IFRETURNEND
PORTB ye bağlı ledlerde binary sayım:

Örnek-9: Timer 0 için harici kesmesini (RA4) kullanarak, 5 kere butona bastığımızda 4 ledin sırasıyla yanmasını sağlayan programın C kodu
Hazırlayan: Dr.Bülent ÇOBANOĞLU19
#include <htc.h> void main(void) { TRISA=0x10; // RA4 giris yapılıyor TRISB=0x00; // PORTB çıkıĢ olarak ayarlanıyor PORTA=0x00; // PORTA sıfırlanıyor PORTB=0x00; // PORTB sıfırlanıyor TMR0=-5; // Esasen 250 yüklenmis oluyor //Bit bit tanımlama veya OPTION_REG dogrudan atama
T0SE=0; // Düsen kenar tetikleme T0CS=1; // Harici osilatör PSA=1; // Prescaler TMR0 için PS2=0; // 1:2 bölüm değeri PS1=0; PS0=0; T0IF=0; // TMR0 kesme bayrağı temizleniyor T0IE=1; // TMR0 kesmesine izin veriliyor GIE=1; // Genel kesme izni veriliyor for(;;); // sonsuz dongu}
static void interrupt isim(void) // Kesme ismi (önemsiz){ char i; // Değiskenler tanımlanıyor if(T0IF) // TMR0 kesmesi olusmus mu { i++; // PORTB'de gözükecek değer if(i==16) i=0;PORTB=i; // Değisken değeri PORTB'ye yansıtılıyor TMR0=-5; // Esasen 250 yüklenmis oluyor T0IF=0; // Tekrar dıs kesme alabilmek için kesme bayrağı temizlenir } }

Örnek-9: Timer 0 için harici kesmesini (RA4) kullanarak, 5 kere butona bastığımızda 4 ledin sırasıyla yanmasını sağlayan programın Assembly dilinde kodlanması
Hazırlayan: Dr.Bülent ÇOBANOĞLU20
LIST P=16F877#include p16f877.inc N EQU 0X00ORG 0x0 ; Reset Adresigoto StartORG 0X04 ; Kesme Adresigoto KESME
StartCLRF PORTBBSF STATUS,5MOVLW b'11101000'BSF TRISA,4MOVWF OPTION_REGCLRF TRISBBCF STATUS,5CLRF PORTBMOVLW b'11100000'MOVWF INTCONMOVLW -3MOVWF TMR0CLRF N
LOOPGOTO LOOP
KESMEINCF N,FMOVF N,WMOVWF PORTBBCF INTCON,T0IFMOVLW -3MOVWF TMR0RETFIE
END

PIC16F877 Kesme Kaynakları
YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
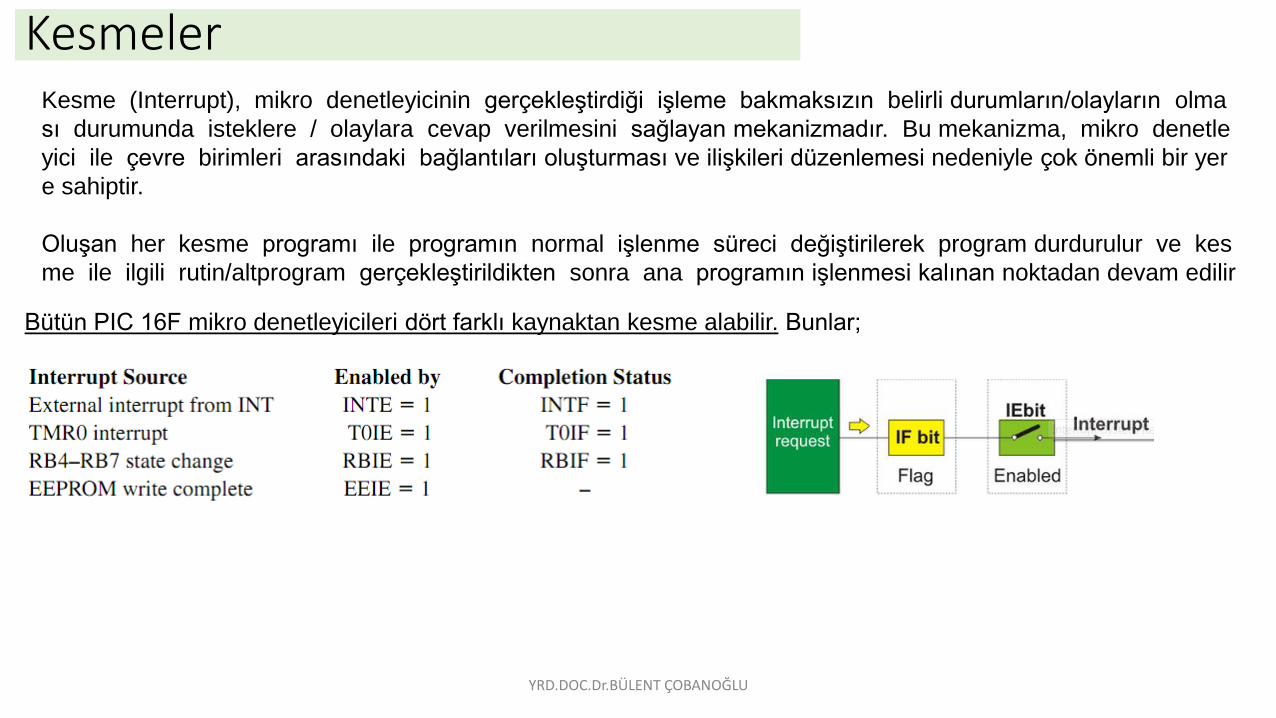
Kesmeler
YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olma
sı durumunda isteklere / olaylara cevap verilmesini sağlayan mekanizmadır. Bu mekanizma, mikro denetle
yici ile çevre birimleri arasındaki bağlantıları oluşturması ve ilişkileri düzenlemesi nedeniyle çok önemli bir yer
e sahiptir.
Oluşan her kesme programı ile programın normal işlenme süreci değiştirilerek program durdurulur ve kes
me ile ilgili rutin/altprogram gerçekleştirildikten sonra ana programın işlenmesi kalınan noktadan devam edilir
Bütün PIC 16F mikro denetleyicileri dört farklı kaynaktan kesme alabilir. Bunlar;