krİtİk yol Şartlarinda abs’nİn kontrol, frenleme...
TRANSCRIPT

OTEKON 2016 8. Otomotiv Teknolojileri Kongresi
23 – 24 Mayıs 2016, BURSA
KRİTİK YOL ŞARTLARINDA ABS’NİN KONTROL, FRENLEME VE FREN KARARLILIĞI PERFORMANSINI BELİRLEYECEK TEST
SİSTEMİNİN GELİŞTİRİLMESİ VE TEST EDİLMESİ
Hakan Köylü*, Ersin Tural**Kocaeli Üniversitesi, Teknoloji Fakültesi, Otomotiv Mühendisliği Bölümü, KOCAELİ
ÖZET Bu çalışmada günümüzde tüm araçlarda mevcut bulunan ABS (Anti-Lock Brake System) fren sisteminin
kontrol ve frenleme performansı ile fren kararlılığının gerçek zamanlı belirlenmesi amaçlanmıştır. Kontrol performansı için fren basıncı, tekerlek hızı, taşıt hızı ve kayma oranı incelenmiştir. Frenleme performansı için de frenleme mesafesi ve frenleme ivmesi ile fren kararlılığı için de savrulma hız oranı incelenmiştir. Bunun için bir araç, fren test aracı haline getirilmiştir. Bu test aracı ile ıslak, kaygan, farklı tutunmalara ayrılmış yol (µ-split) ve farklı tutunmalara bölünmüş (µ-jump) gibi kritik yol şartlarında iki farklı taşıt hızında testler gerçekleştirilmiştir. Test sonuçları zaman boyutunda değerlendirilmiştir. Sonuçlar, test sisteminin, ABS fren sisteminin kontrol ve frenleme performansı ile fren karalılığının belirlenmesini sağladığı tespit edilmiştir.
Anahtar kelimeler: ABS, kritik yol, performans, kararlılık.
DEVELOPMENT OF TEST SYSTEM TO DETERMINE THE CONTROL, BRAKING AND BRAKING STABILITY OF ABS UNDER CRITICAL RAOD CONDITIONS
ABSTRACT In this study, it is aimed to be determinedcontrol, brakingandstability of ABS braking system, which is
available in all vehicles, in real time. The brake pressure, wheel speed, vehicle speed and slip ratio are investigated for the control performance. The braking distance and braking acceleration are investigated for thebraking performance and theyaw rate is used for stability analysis during braking with activated ABS. For this analysis, a vehicle is designed as a test vehicle to measure control, braking and stability performances of ABS. Wet, slippery, µ-split and µ-jump road tests of ABS have been conducted for two different vehicle speed. Test results have been evaluated in time domain. The test results show that the test system provides control, braking performance and braking stability to determine.
Keywords: ABS, critical road condition, performance, stability.
1. GİRİŞABS (Antilock Brake System) fren sistemi, en
önemli taşıt güvenlik sistemlerinden birisidir. Günümüzde, ABS fren sistemi, tüm araçlarda, standart olarak kullanıldığı için, giderek önemi artmaktadır. ABS fren sistemi; lastik ile yol yüzeyi arasındaki, tutunmaya bağlı olarak, tekerleğe uygun frenleme kuvveti uygulandığında, maksimum frenleme verimi elde edilebileceği düşüncesine dayanır. ABS sistemleri, kayma anında, boylamsal kaymayı azaltarak, taşıt kontrolünü sağlar. ABS sistemleri, fren torkunu ayarlamak için, fren basıncını ayarlar. Bu fren basıncı değişimleri ile kayma oranını ve tekerlek ivmesini kontrol etmektedir. Bu nedenle; ABS fren sistemi, yol tutunmasındaki değişimlere bağlı olarak, uygun
frenleme kuvvetini amaçlar [1,2]. Burada, yola tutunmanın, büyük ölçüde, tekerleğe etkiyen düşey yüke bağlı olması, önemli bir noktadır. Bu düşey yükler, taşıtın viraj alma ve boylamsal hareketi sırasında, tekerleklere farklı olarak dağıtılmaktadır. Bu nedenle; taşıtın hareketine göre, ABS’nin frenleme kuvveti dağılımı ve performansı değişiklik göstermektedir. Bu durum, ABS’nin performansının farklı yol koşullarında ölçülmesini gerektirmektedir. Bu nedenle, düz yol, şerit değiştirme, geçiş, viraj alma vs. sırasında birçok frenleme testi gerçekleştirilmektedir. ABS düz yol frenleme testlerini, her yol şartında, simule etmek için; farklı yol yüzeyi çeşitleri dizayn edilmektedir. Bu yol yüzeyleri; kuru asfalt, ıslak asfalt, ıslak beton, ıslak epoksi ve çakıl zemindir. Geçiş yol testleri ise; ABS frenleme anında, sürtünme katsayısının değiştiği bir durumdur. Bu testlerin
1184
amacı; yol yüzeyindeki ani değişimlere karşı sistemin tepkisini incelemektir [3,4,5]. Wu ve diğ. [6], ABS’nin frenleme mesafesi performansını hem yol testleri hem de teorik hesaplama ile kuru beton ve ıslak beton yüzeylerde analiz etmişlerdir.
ABS fren sistemi performansını belirlemek için test sisteminin kurulumunun uzun ve test şartlarının oluşturulmasının maliyetli olması nedeniyle birçok simülasyon teknikleri kullanılmıştır. Eriksson [7]; Matlab/Simulink’teki ABS modeli ve MSC Adams’daki tam taşıt modelinin eş çalıştırılması (co-simulation) ile ABS fren sistemini düz yol ve dönüş anında farklı yol tiplerinde test etmiştir. Li ve diğ. [8] çalışmalarında; ABS fren sisteminin hızlı bir şekilde geliştirilebilmesine olanak sağlayan HIL (Hardware-in-the-loop) simülasyon kullanmışlardır. Cheli ve diğ. [9] ise; tasarladıkları ABS modelinin performansının gerçek yol testleri ile HIL test platformundaki sonuçlarını karşılaştırmıştır. Patil ve diğ. [10], tasarladıkları ABS kontrolörünün μ-jump ve dönüş anındaki performansını, HIL sistemi ile incelemişlerdir.
ABS fren sistemlerinin performans belirlenmesinde en önemli unsurlardan biri de konrolör performansının test edilmesidir. Watanabe ve Noguchi [11]; daha iyi bir ABS kontrolü için kontrol değişkenleri ile fren basıncı değişimi arasındaki kontrol döngüsünü kötüleştiren etkenler üzerine araştırmalar gerçekleştirilmiştir. Sonuç olarak, kayma değişiminde kararsızlığa neden olabilecek etkenlerin ortaya çıkabileceğini vurgulamışlardır. Cheli ve diğ. [9] ise; her ABS kontrol döngüsünün başlayacağı ve sona ereceği fren basıncı noktalarının iyi tespit edilmesi gerektiğini vurgulamıştır. Bu fren basıncı noktalarının, farklı tutunma katsayılı yollarda farklılık göstereceğini de belirtmişlerdir. Aynı zamanda ABS fren sisteminde uyguladığı, kontrol algoritması ile ABS’siz bir sisteme göre, düşük sürtünme katsayılı yüzeyde, frenleme anında, iyi bir kayma kontrolü elde edildiği sonucuna ulaşmıştır. Başlamışlı [12] araştırmasında; elektromekanik fren sistemine sahip binek taşıtlara yönelik olarak tasarladığı, sürüş ve yol şartlarına göre uyarlanabilen ABS kontrol algoritmalarının, ıslak asfalt yol, kuru asfalt yol ve μ-jump(ıslak asfalt yoldan kuru asfalt yola geçiş) durumlarındaki frenleme simülasyonunun çözümlemesini kapsamaktadır. Solyom [13], tasarladığı anlık kayma değerini tespit eden ABS kontrol algoritması ile boylamsal kayma durumunu istenilen değerde tutmaya çalışmıştır. Böylece, yol şartlarına göre uyarlanabilen kontrolcü mimarisini incelemiştir.
Sonuç olarak, ABS performansını araştırmada, birçok farklı test metodu kullanılmaktadır. Bu testler, ABS performansının taşıt güvenliği için, çok önemli olduğunu göstermiştir. Çalışmaların tümünde ya kontrolör, ya frenleme performansı değerlendirilmiştir. ABS’nin frenleme öncesi, frenleme sırasında ve frenleme sonrasındaki
performansları, aynı anda ölçülmemiş ve değerlendirilmemiştir. Bunun için bu çalışmada ABS’nin kontrol, frenleme ve kararlılık testleri gerçek zamanlı ve aynı anda gerçekleştirilmiştir. Bu sayede, fren basıncındaki değişimin, kayma oranına, tekerlek ve taşıt hızına hız etkileri ile kontrolör performansı tespit edilebilmektedir. Diğer taraftan, fren basıncıdaki değişimlerin frenleme performansına etkileri, frenleme mesafesi ve frenleme ivmesi ile berlilenebilmektedir. Aynı zamanda, eş zamanlı olarak savrulma hız oranı ile de fren kararlılığı ölçülebilmektedir.
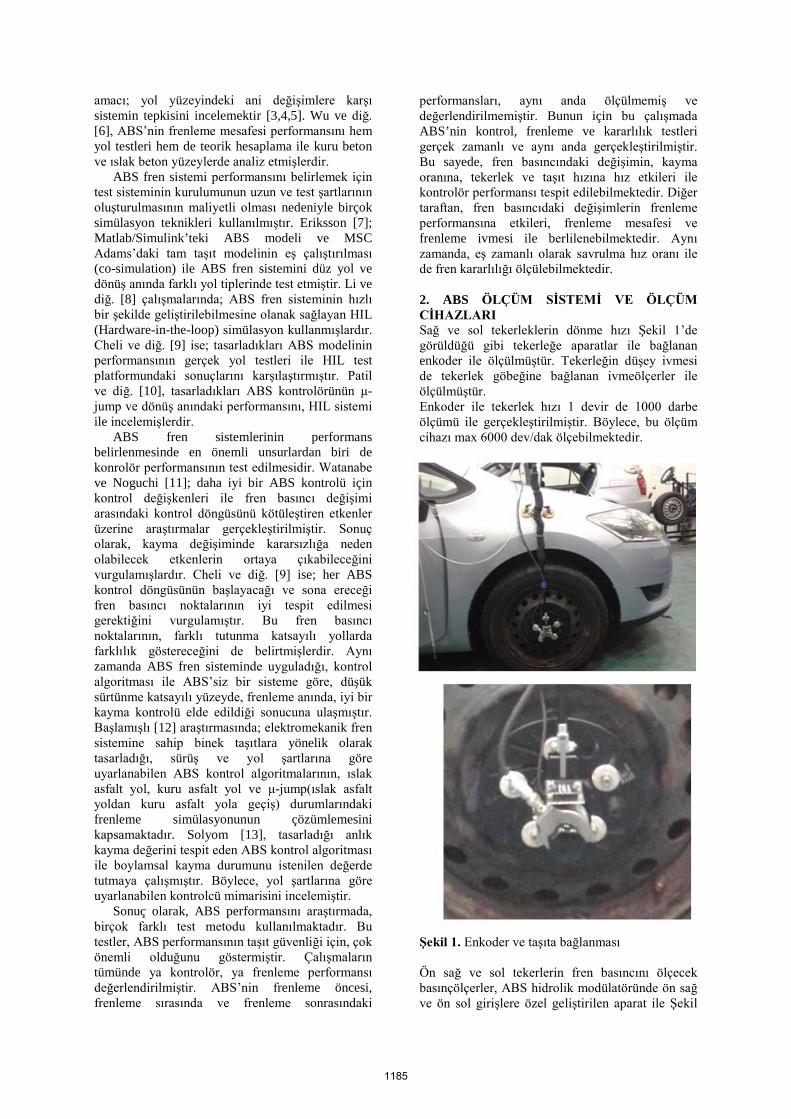
2. ABS ÖLÇÜM SİSTEMİ VE ÖLÇÜMCİHAZLARI Sağ ve sol tekerleklerin dönme hızı Şekil 1’de görüldüğü gibi tekerleğe aparatlar ile bağlanan enkoder ile ölçülmüştür. Tekerleğin düşey ivmesi de tekerlek göbeğine bağlanan ivmeölçerler ile ölçülmüştür. Enkoder ile tekerlek hızı 1 devir de 1000 darbe ölçümü ile gerçekleştirilmiştir. Böylece, bu ölçüm cihazı max 6000 dev/dak ölçebilmektedir.
Şekil 1. Enkoder ve taşıta bağlanması
Ön sağ ve sol tekerlerin fren basıncını ölçecek basınçölçerler, ABS hidrolik modülatöründe ön sağ ve ön sol girişlere özel geliştirilen aparat ile Şekil
1185
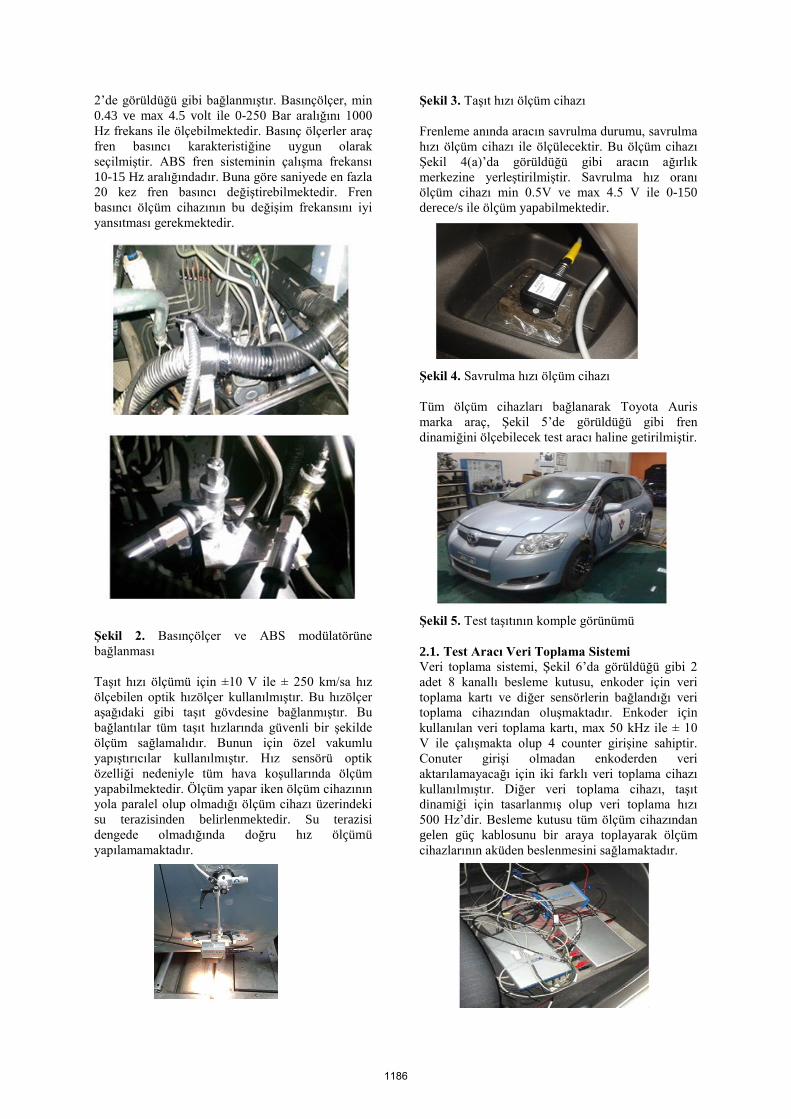
2’de görüldüğü gibi bağlanmıştır. Basınçölçer, min 0.43 ve max 4.5 volt ile 0-250 Bar aralığını 1000 Hz frekans ile ölçebilmektedir. Basınç ölçerler araç fren basıncı karakteristiğine uygun olarak seçilmiştir. ABS fren sisteminin çalışma frekansı 10-15 Hz aralığındadır. Buna göre saniyede en fazla 20 kez fren basıncı değiştirebilmektedir. Fren basıncı ölçüm cihazının bu değişim frekansını iyi yansıtması gerekmektedir.
Şekil 2. Basınçölçer ve ABS modülatörüne bağlanması
Taşıt hızı ölçümü için ±10 V ile ± 250 km/sa hız ölçebilen optik hızölçer kullanılmıştır. Bu hızölçer aşağıdaki gibi taşıt gövdesine bağlanmıştır. Bu bağlantılar tüm taşıt hızlarında güvenli bir şekilde ölçüm sağlamalıdır. Bunun için özel vakumlu yapıştırıcılar kullanılmıştır. Hız sensörü optik özelliği nedeniyle tüm hava koşullarında ölçüm yapabilmektedir. Ölçüm yapar iken ölçüm cihazının yola paralel olup olmadığı ölçüm cihazı üzerindeki su terazisinden belirlenmektedir. Su terazisi dengede olmadığında doğru hız ölçümü yapılamamaktadır.
Şekil 3. Taşıt hızı ölçüm cihazı
Frenleme anında aracın savrulma durumu, savrulma hızı ölçüm cihazı ile ölçülecektir. Bu ölçüm cihazı Şekil 4(a)’da görüldüğü gibi aracın ağırlık merkezine yerleştirilmiştir. Savrulma hız oranı ölçüm cihazı min 0.5V ve max 4.5 V ile 0-150 derece/s ile ölçüm yapabilmektedir.
Şekil 4. Savrulma hızı ölçüm cihazı
Tüm ölçüm cihazları bağlanarak Toyota Auris marka araç, Şekil 5’de görüldüğü gibi fren dinamiğini ölçebilecek test aracı haline getirilmiştir.
Şekil 5. Test taşıtının komple görünümü
2.1. Test Aracı Veri Toplama Sistemi Veri toplama sistemi, Şekil 6’da görüldüğü gibi 2 adet 8 kanallı besleme kutusu, enkoder için veri toplama kartı ve diğer sensörlerin bağlandığı veri toplama cihazından oluşmaktadır. Enkoder için kullanılan veri toplama kartı, max 50 kHz ile ± 10 V ile çalışmakta olup 4 counter girişine sahiptir. Conuter girişi olmadan enkoderden veri aktarılamayacağı için iki farklı veri toplama cihazı kullanılmıştır. Diğer veri toplama cihazı, taşıt dinamiği için tasarlanmış olup veri toplama hızı 500 Hz’dir. Besleme kutusu tüm ölçüm cihazından gelen güç kablosunu bir araya toplayarak ölçüm cihazlarının aküden beslenmesini sağlamaktadır.
1186
Şekil 6. Veri toplama sistemi Veri toplama sisteminden toplanan tüm veriler,
Şekil 7’de verilen veri toplama yazılımına aktarılmış ve değerlendirilmiştir.
3. ABS TESTLERİTest aracı ile ABS testleri 5 farklı yol tipinde
gerçekleştirilmiştir. Şekil 7’de görüldüğü gibi bu testler için aracın sağ ve sol amortisörleri yenleri ile değiştirilmiştir. Bu şekilde kontrol sisteminin, fren sisteminin ve fren kararlılığını belirlemek için karşılaştırma daha doğru bir şekilde yapılabilecektir.
Şekil 7. Test aracına monte edilen yeni amortisör
ABS testleri Şekil 8’de verilen test ortamında gerçekleştirilmiştir.
Şekil 8. ABS test ortamı
Şekil 8’de yeşil renk ile görülen zemin 0.25 tutunma katsayısına sahip epoxy zemin olup kaygan yolu oluşturmaktadır. Testler anında tüm zemin, sulama sistemi ile sulanmaktadır. Bu test ortamında elde edilen test şartları aşağıdaki gibidir. - Kaygan yol testi - Islak yol testi - Islak yoldan kaygan yola geçiş testi (µ-jump) - Kaygan yolda ıslak yola geçiş testi (µ-jump) - Ayrık yol testi (µ-split)
Kaygan yol testinde, ABS, kaygan yolu sağlayan epoksi zemin üzerinde aktif hale gelecek şekilde frenleme başlatılmış ve yine kaygan zemin üzerinde frenleme sona erdirilmiştir. Kaygan yol test anı Şekil 9’da verilmiştir.
Şekil 9. Kaygan yol testi
Islak yol testinde, ABS ıslak yol üzerinde aktif hale gelecek şekilde frenleme başlatılmış ve yine ıslak zemin üzerinde frenleme sona erdirilmiştir. Islak yoldan kaygan yola geçiş testlerinde, aktif ABS ile frenleme ıslak zeminde başlatılmış ABS aktif halde iken kaygan zemine geçilmiş ve frenleme kaygan zeminde sona erdirilmiştir. Islak yoldan kaygan yola geçiş test anı ve aracın konumu Şekil 10’da verilmiştir.
Şekil 10. Islak yoldan kaygan yola geçiş testi
Kaygan yoldan ıslak yola geçiş testlerinde, aktif ABS ile frenleme kaygan zeminde başlatılmış ABS aktif halde iken ıslak zemine geçilmiş ve frenleme ıslak zeminde sona erdirilmiştir. Kaygan yoldan ıslak yola geçişte test anı ve aracın konumu, Şekil 11’de verilmiştir.
Şekil 11. Kaygan yoldan ıslak yola geçiş testi
1187
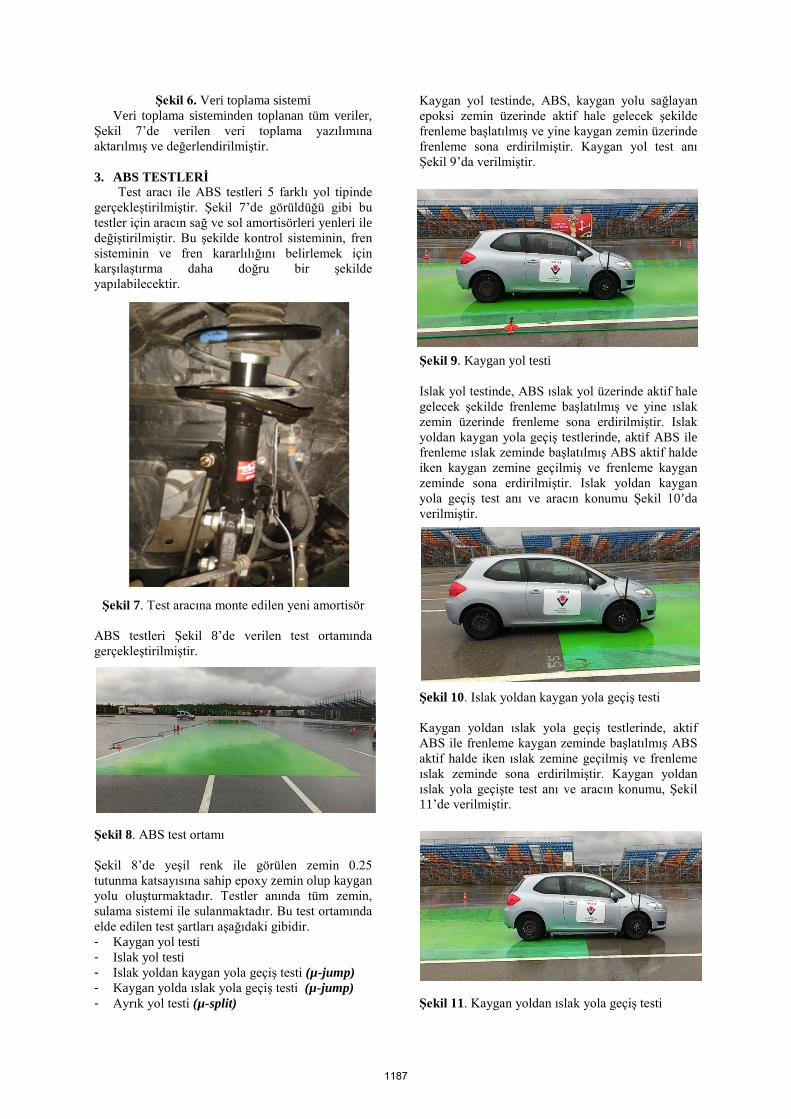
Ayrık yol testinde, Şekil 12’de görüldüğü üzere sağ tekerlekler kaygan zeminde sol tekerlekler ıslak zeminde olacak şekilde ABS ile frenleme gerçekleştirilmiştir.
Şekil 13. Ayrık yol testi
4. ÖLÇÜM CİHAZLARININ KALİBRASYONDEĞERLERİNİN VE TEST SONUÇLARININ DOĞRULANMASI
Bu test aracı ile 55 km/sa hızda iken ABS aktif hale gelebilecek şekilde fren pedalına basılarak frenleme başlatılmış, fren pedalı sabit tutularak frenlemeye devam edilmiş ve 1.6s sonra frenleme sona ermiştir. Testlerden elde edilen sonuçlar aşağıdaki gibidir.
Bu proje çalışmasında en önemli hususlardan bir tanesi fren basıncının doğru ölçülmesidir. Bunun için özel fren basıncı sensörü kullanılmış ve bu sensör ABS modülatörüne sızdırmaz bir şekilde bağlanmıştır. Aynı zamanda bu fren basıncına uygun fren basıncı değişim oranının elde edilmesi de kontrol algoritması için oldukça önemlidir. Ölçülen fren basıncı ve fren basıncı değişim oranı arasındaki uyum, Şekil 14’de görülmektedir.
Şekil 14. Fren basıncı ile fren basıncı değişim oranının karşılaştırılması
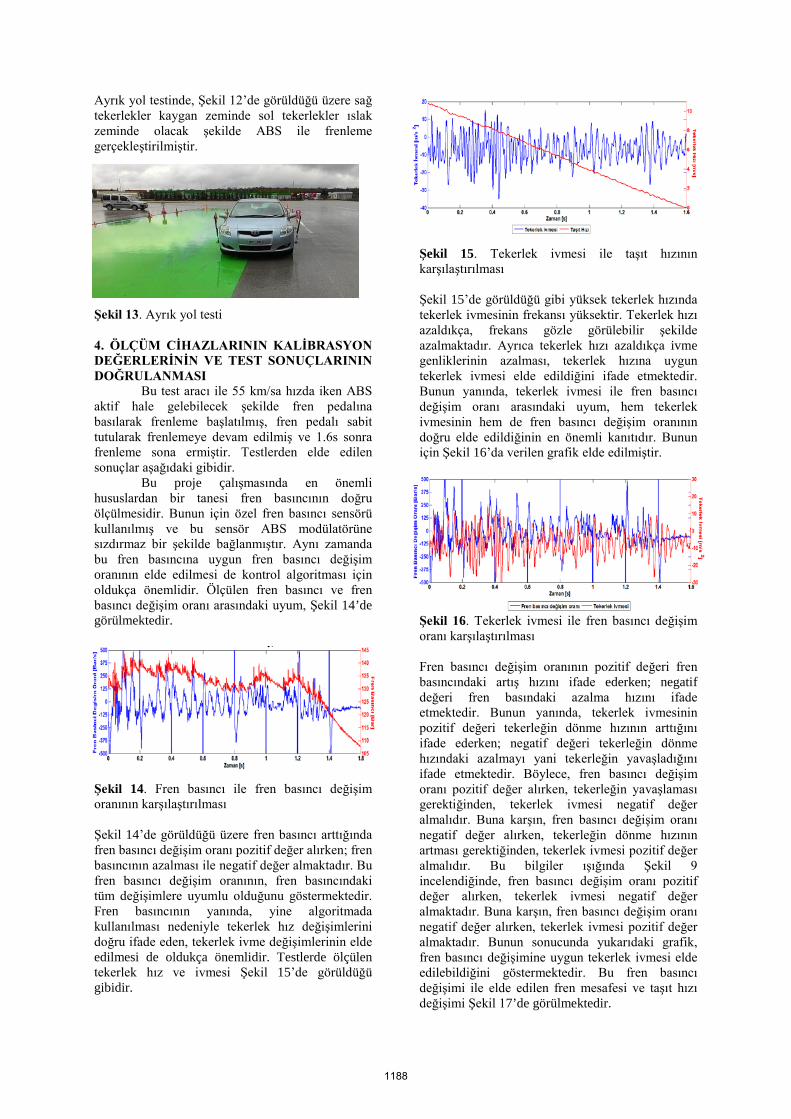
Şekil 14’de görüldüğü üzere fren basıncı arttığında fren basıncı değişim oranı pozitif değer alırken; fren basıncının azalması ile negatif değer almaktadır. Bu fren basıncı değişim oranının, fren basıncındaki tüm değişimlere uyumlu olduğunu göstermektedir. Fren basıncının yanında, yine algoritmada kullanılması nedeniyle tekerlek hız değişimlerini doğru ifade eden, tekerlek ivme değişimlerinin elde edilmesi de oldukça önemlidir. Testlerde ölçülen tekerlek hız ve ivmesi Şekil 15’de görüldüğü gibidir.
Şekil 15. Tekerlek ivmesi ile taşıt hızının karşılaştırılması
Şekil 15’de görüldüğü gibi yüksek tekerlek hızında tekerlek ivmesinin frekansı yüksektir. Tekerlek hızı azaldıkça, frekans gözle görülebilir şekilde azalmaktadır. Ayrıca tekerlek hızı azaldıkça ivme genliklerinin azalması, tekerlek hızına uygun tekerlek ivmesi elde edildiğini ifade etmektedir. Bunun yanında, tekerlek ivmesi ile fren basıncı değişim oranı arasındaki uyum, hem tekerlek ivmesinin hem de fren basıncı değişim oranının doğru elde edildiğinin en önemli kanıtıdır. Bunun için Şekil 16’da verilen grafik elde edilmiştir.
Şekil 16. Tekerlek ivmesi ile fren basıncı değişim oranı karşılaştırılması
Fren basıncı değişim oranının pozitif değeri fren basıncındaki artış hızını ifade ederken; negatif değeri fren basındaki azalma hızını ifade etmektedir. Bunun yanında, tekerlek ivmesinin pozitif değeri tekerleğin dönme hızının arttığını ifade ederken; negatif değeri tekerleğin dönme hızındaki azalmayı yani tekerleğin yavaşladığını ifade etmektedir. Böylece, fren basıncı değişim oranı pozitif değer alırken, tekerleğin yavaşlaması gerektiğinden, tekerlek ivmesi negatif değer almalıdır. Buna karşın, fren basıncı değişim oranı negatif değer alırken, tekerleğin dönme hızının artması gerektiğinden, tekerlek ivmesi pozitif değer almalıdır. Bu bilgiler ışığında Şekil 9 incelendiğinde, fren basıncı değişim oranı pozitif değer alırken, tekerlek ivmesi negatif değer almaktadır. Buna karşın, fren basıncı değişim oranı negatif değer alırken, tekerlek ivmesi pozitif değer almaktadır. Bunun sonucunda yukarıdaki grafik, fren basıncı değişimine uygun tekerlek ivmesi elde edilebildiğini göstermektedir. Bu fren basıncı değişimi ile elde edilen fren mesafesi ve taşıt hızı değişimi Şekil 17’de görülmektedir.
1188
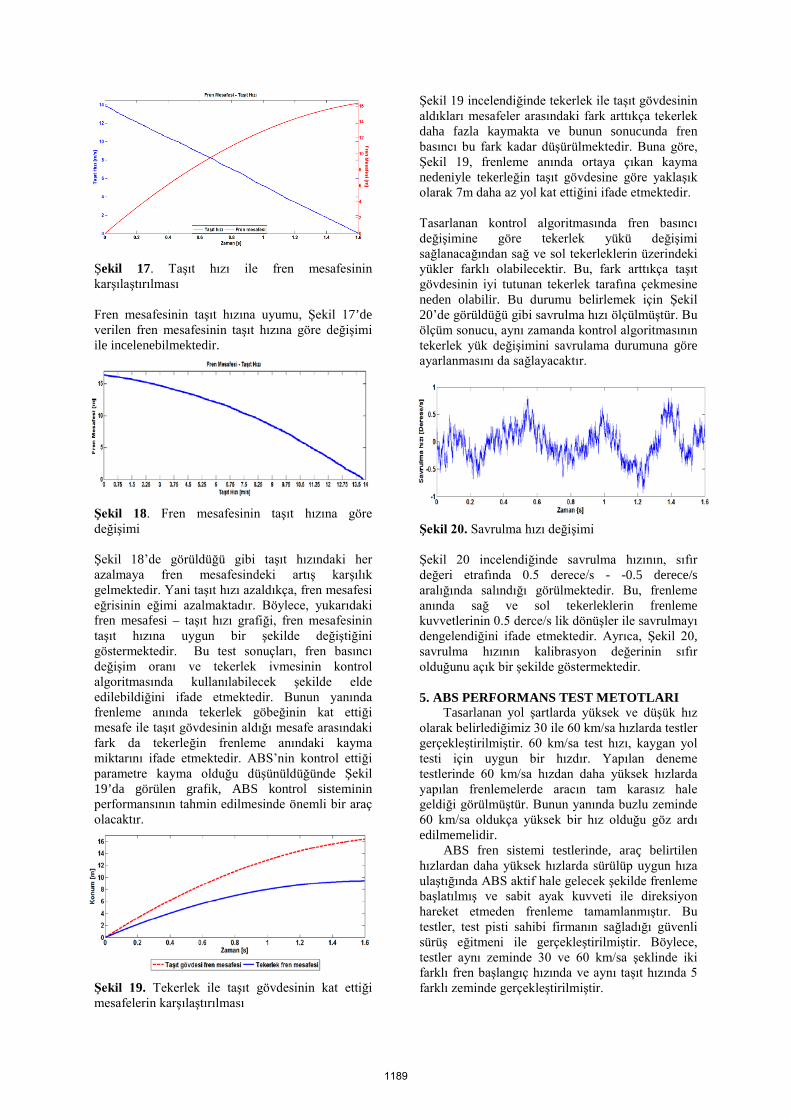
Şekil 17. Taşıt hızı ile fren mesafesinin karşılaştırılması
Fren mesafesinin taşıt hızına uyumu, Şekil 17’de verilen fren mesafesinin taşıt hızına göre değişimi ile incelenebilmektedir.
Şekil 18. Fren mesafesinin taşıt hızına göre değişimi
Şekil 18’de görüldüğü gibi taşıt hızındaki her azalmaya fren mesafesindeki artış karşılık gelmektedir. Yani taşıt hızı azaldıkça, fren mesafesi eğrisinin eğimi azalmaktadır. Böylece, yukarıdaki fren mesafesi – taşıt hızı grafiği, fren mesafesinin taşıt hızına uygun bir şekilde değiştiğini göstermektedir. Bu test sonuçları, fren basıncı değişim oranı ve tekerlek ivmesinin kontrol algoritmasında kullanılabilecek şekilde elde edilebildiğini ifade etmektedir. Bunun yanında frenleme anında tekerlek göbeğinin kat ettiği mesafe ile taşıt gövdesinin aldığı mesafe arasındaki fark da tekerleğin frenleme anındaki kayma miktarını ifade etmektedir. ABS’nin kontrol ettiği parametre kayma olduğu düşünüldüğünde Şekil 19’da görülen grafik, ABS kontrol sisteminin performansının tahmin edilmesinde önemli bir araç olacaktır.
Şekil 19. Tekerlek ile taşıt gövdesinin kat ettiği mesafelerin karşılaştırılması
Şekil 19 incelendiğinde tekerlek ile taşıt gövdesinin aldıkları mesafeler arasındaki fark arttıkça tekerlek daha fazla kaymakta ve bunun sonucunda fren basıncı bu fark kadar düşürülmektedir. Buna göre, Şekil 19, frenleme anında ortaya çıkan kayma nedeniyle tekerleğin taşıt gövdesine göre yaklaşık olarak 7m daha az yol kat ettiğini ifade etmektedir.
Tasarlanan kontrol algoritmasında fren basıncı değişimine göre tekerlek yükü değişimi sağlanacağından sağ ve sol tekerleklerin üzerindeki yükler farklı olabilecektir. Bu, fark arttıkça taşıt gövdesinin iyi tutunan tekerlek tarafına çekmesine neden olabilir. Bu durumu belirlemek için Şekil 20’de görüldüğü gibi savrulma hızı ölçülmüştür. Bu ölçüm sonucu, aynı zamanda kontrol algoritmasının tekerlek yük değişimini savrulama durumuna göre ayarlanmasını da sağlayacaktır.
Şekil 20. Savrulma hızı değişimi
Şekil 20 incelendiğinde savrulma hızının, sıfır değeri etrafında 0.5 derece/s - -0.5 derece/s aralığında salındığı görülmektedir. Bu, frenleme anında sağ ve sol tekerleklerin frenleme kuvvetlerinin 0.5 derce/s lik dönüşler ile savrulmayı dengelendiğini ifade etmektedir. Ayrıca, Şekil 20, savrulma hızının kalibrasyon değerinin sıfır olduğunu açık bir şekilde göstermektedir.
5. ABS PERFORMANS TEST METOTLARITasarlanan yol şartlarda yüksek ve düşük hız
olarak belirlediğimiz 30 ile 60 km/sa hızlarda testler gerçekleştirilmiştir. 60 km/sa test hızı, kaygan yol testi için uygun bir hızdır. Yapılan deneme testlerinde 60 km/sa hızdan daha yüksek hızlarda yapılan frenlemelerde aracın tam karasız hale geldiği görülmüştür. Bunun yanında buzlu zeminde 60 km/sa oldukça yüksek bir hız olduğu göz ardı edilmemelidir.
ABS fren sistemi testlerinde, araç belirtilen hızlardan daha yüksek hızlarda sürülüp uygun hıza ulaştığında ABS aktif hale gelecek şekilde frenleme başlatılmış ve sabit ayak kuvveti ile direksiyon hareket etmeden frenleme tamamlanmıştır. Bu testler, test pisti sahibi firmanın sağladığı güvenli sürüş eğitmeni ile gerçekleştirilmiştir. Böylece, testler aynı zeminde 30 ve 60 km/sa şeklinde iki farklı fren başlangıç hızında ve aynı taşıt hızında 5 farklı zeminde gerçekleştirilmiştir.
1189

ABS fren sisteminin performansı, birbiri ile senkron olan bir çok değişken ile belirlenmektedir. Bu nedenle ölçümlerin eş zamanlı olması oldukça önemlidir. Bu çalışmada, testler anında tüm ölçüm cihazlarından gelen verileri, eş zamanlı toplayabilmek için taşıt hızı referans alınmıştır. Bunun için yazılımın tetikleme özelliği kullanılmıştır. Böylece, 30 km/sa testlerinde frenleme anında taşıt hızı 30 km/sa hıza ulaştığında kayıt otomatik olarak başlatılmış ve taşıt hızı 0 km/sa olduğunda test kaydı yazılım tarafından durdurulmuştur. Aynı işlemler 60 km/sa testinde de tekrar edilmiştir.
6. ABS TEST SONUÇLARITest sonuçları, aşağıdaki durumlara göre incelenmiştir.
- Aynı yolda farklı taşıt hızlarına göre değerlendirme
- Aynı taşıt hızında farklı yol tiplerine göre değerlendirme
6.1. Tekerlek Hızı ve Taşıt Hızı Sonuçları
Tekerlek hızının taşıt hızına göre değişimleri Şekil 21’de verilmiştir.
Şekil 21. Tekerlek ve taşıt hızı sonuçları
Şekil 21’de görüldüğü gibi düşük taşıt hızlarında yapılan aktif ABS li frenlemelerde tekerlek birçok kez kilitlenmiştir. Yüksek taşıt hızlarında ise tekerlek kilitlenmesi, sadece frenleme anında ıslak yoldan kaygan yola geçişte yaşanmıştır.
Düşük hızlarda kaygan yolda yapılan frenlemelerde tekerlek hız düşüşleri artarken yol tutunması arttığında hız düşüşleri azalmaktadır. Buna karşın yol tipi ne olursa olsun düşük hızlarda tekerlek birçok kez kilitlenmiştir. Yüksek hızda frenleme anında yol kayganlaştığında tekerlek hızı aniden ve uzun süreli kilitlenmektedir. Yüksek hızda kaygan yolda yapılan frenleme anında ıslak yola geçişte tekerlek hızı taşıt gövdesi ile aynı şekilde azalmaktadır. Bu, ABS fren basıncı değişiminin tekerleğin yol tutuş kapasitesine uygun olmadığını ifade etmektedir. Taşıtın sağ ve sol tekerlekleri farklı tutunmalı yol üzerinde iken düşük hızda yapılan frenleme anında tekerlek daha fazla kilitlenmiştir. Yüksek hızlarda ise tekerlek hız düşüş şiddeti oldukça azalmıştır. Bu, farklı tutunmalı yol üzerinde uygulanan fren basıncı dağılımının düşük hızda gereğinden fazla yüksek hızlarda ise gereğinden daha az arttırıldığını göstermektedir. Bu sonuçlar fren basıncı değişimlerinden daha açık bir şekilde belirlenebilir.
1190
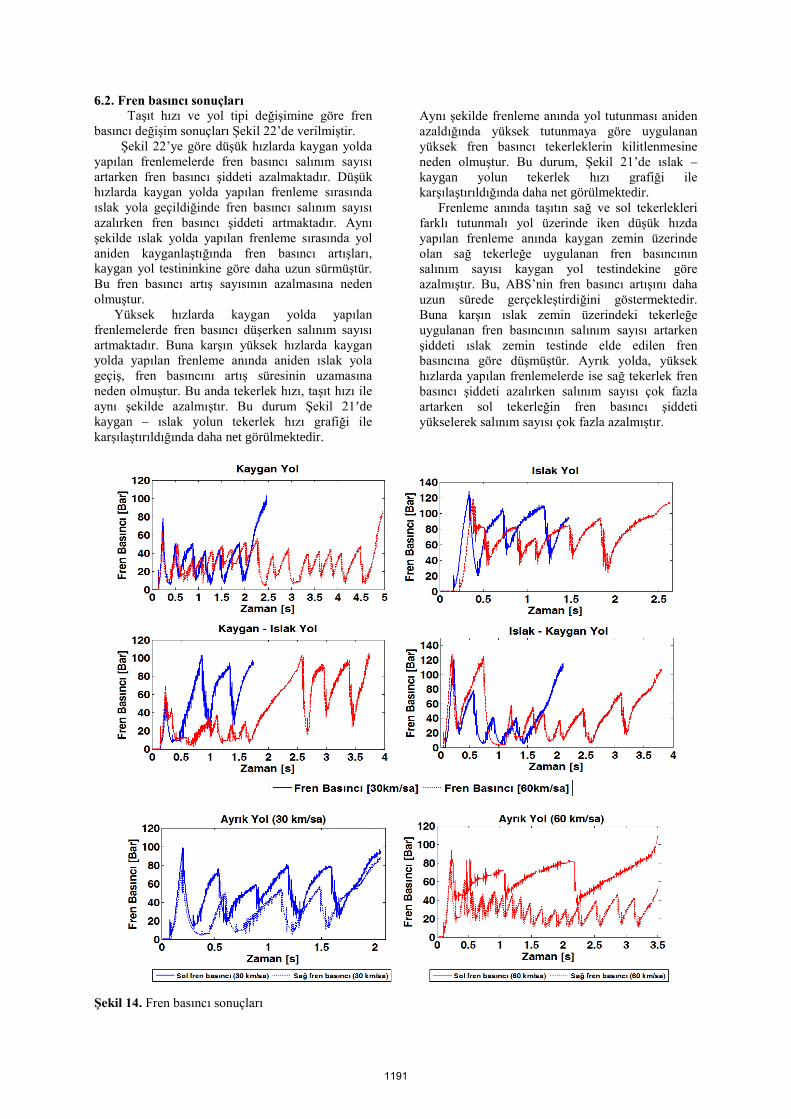
6.2. Fren basıncı sonuçları Taşıt hızı ve yol tipi değişimine göre fren basıncı değişim sonuçları Şekil 22’de verilmiştir. Şekil 22’ye göre düşük hızlarda kaygan yolda yapılan frenlemelerde fren basıncı salınım sayısı artarken fren basıncı şiddeti azalmaktadır. Düşük hızlarda kaygan yolda yapılan frenleme sırasında ıslak yola geçildiğinde fren basıncı salınım sayısı azalırken fren basıncı şiddeti artmaktadır. Aynı şekilde ıslak yolda yapılan frenleme sırasında yol aniden kayganlaştığında fren basıncı artışları, kaygan yol testininkine göre daha uzun sürmüştür. Bu fren basıncı artış sayısının azalmasına neden olmuştur. Yüksek hızlarda kaygan yolda yapılan frenlemelerde fren basıncı düşerken salınım sayısı artmaktadır. Buna karşın yüksek hızlarda kaygan yolda yapılan frenleme anında aniden ıslak yola geçiş, fren basıncını artış süresinin uzamasına neden olmuştur. Bu anda tekerlek hızı, taşıt hızı ile aynı şekilde azalmıştır. Bu durum Şekil 21’de kaygan – ıslak yolun tekerlek hızı grafiği ile karşılaştırıldığında daha net görülmektedir.
Şekil 14. Fren basıncı sonuçları
Aynı şekilde frenleme anında yol tutunması aniden azaldığında yüksek tutunmaya göre uygulanan yüksek fren basıncı tekerleklerin kilitlenmesine neden olmuştur. Bu durum, Şekil 21’de ıslak – kaygan yolun tekerlek hızı grafiği ile karşılaştırıldığında daha net görülmektedir.
Frenleme anında taşıtın sağ ve sol tekerlekleri farklı tutunmalı yol üzerinde iken düşük hızda yapılan frenleme anında kaygan zemin üzerinde olan sağ tekerleğe uygulanan fren basıncının salınım sayısı kaygan yol testindekine göre azalmıştır. Bu, ABS’nin fren basıncı artışını daha uzun sürede gerçekleştirdiğini göstermektedir. Buna karşın ıslak zemin üzerindeki tekerleğe uygulanan fren basıncının salınım sayısı artarken şiddeti ıslak zemin testinde elde edilen fren basıncına göre düşmüştür. Ayrık yolda, yüksek hızlarda yapılan frenlemelerde ise sağ tekerlek fren basıncı şiddeti azalırken salınım sayısı çok fazla artarken sol tekerleğin fren basıncı şiddeti yükselerek salınım sayısı çok fazla azalmıştır.
1191
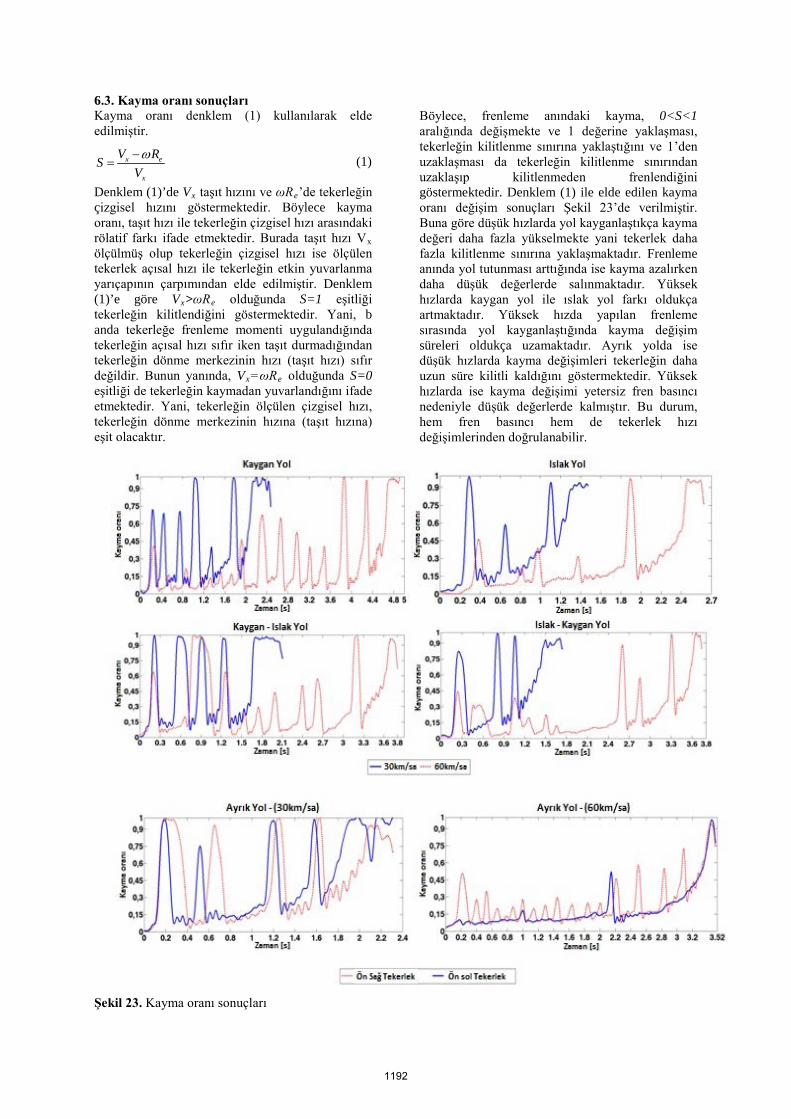
6.3. Kayma oranı sonuçları Kayma oranı denklem (1) kullanılarak elde edilmiştir.
(1)
Denklem (1)’de Vx taşıt hızını ve ωRe’de tekerleğin çizgisel hızını göstermektedir. Böylece kayma oranı, taşıt hızı ile tekerleğin çizgisel hızı arasındaki rölatif farkı ifade etmektedir. Burada taşıt hızı Vx ölçülmüş olup tekerleğin çizgisel hızı ise ölçülen tekerlek açısal hızı ile tekerleğin etkin yuvarlanma yarıçapının çarpımından elde edilmiştir. Denklem (1)’e göre Vx>ωRe olduğunda S=1 eşitliği tekerleğin kilitlendiğini göstermektedir. Yani, b anda tekerleğe frenleme momenti uygulandığında tekerleğin açısal hızı sıfır iken taşıt durmadığından tekerleğin dönme merkezinin hızı (taşıt hızı) sıfır değildir. Bunun yanında, Vx=ωRe olduğunda S=0 eşitliği de tekerleğin kaymadan yuvarlandığını ifade etmektedir. Yani, tekerleğin ölçülen çizgisel hızı, tekerleğin dönme merkezinin hızına (taşıt hızına) eşit olacaktır.
Şekil 23. Kayma oranı sonuçları
Böylece, frenleme anındaki kayma, 0<S<1 aralığında değişmekte ve 1 değerine yaklaşması, tekerleğin kilitlenme sınırına yaklaştığını ve 1’den uzaklaşması da tekerleğin kilitlenme sınırından uzaklaşıp kilitlenmeden frenlendiğini göstermektedir. Denklem (1) ile elde edilen kayma oranı değişim sonuçları Şekil 23’de verilmiştir. Buna göre düşük hızlarda yol kayganlaştıkça kayma değeri daha fazla yükselmekte yani tekerlek daha fazla kilitlenme sınırına yaklaşmaktadır. Frenleme anında yol tutunması arttığında ise kayma azalırken daha düşük değerlerde salınmaktadır. Yüksek hızlarda kaygan yol ile ıslak yol farkı oldukça artmaktadır. Yüksek hızda yapılan frenleme sırasında yol kayganlaştığında kayma değişim süreleri oldukça uzamaktadır. Ayrık yolda ise düşük hızlarda kayma değişimleri tekerleğin daha uzun süre kilitli kaldığını göstermektedir. Yüksek hızlarda ise kayma değişimi yetersiz fren basıncı nedeniyle düşük değerlerde kalmıştır. Bu durum, hem fren basıncı hem de tekerlek hızı değişimlerinden doğrulanabilir.
x e
x
V RSVω−
=
1192
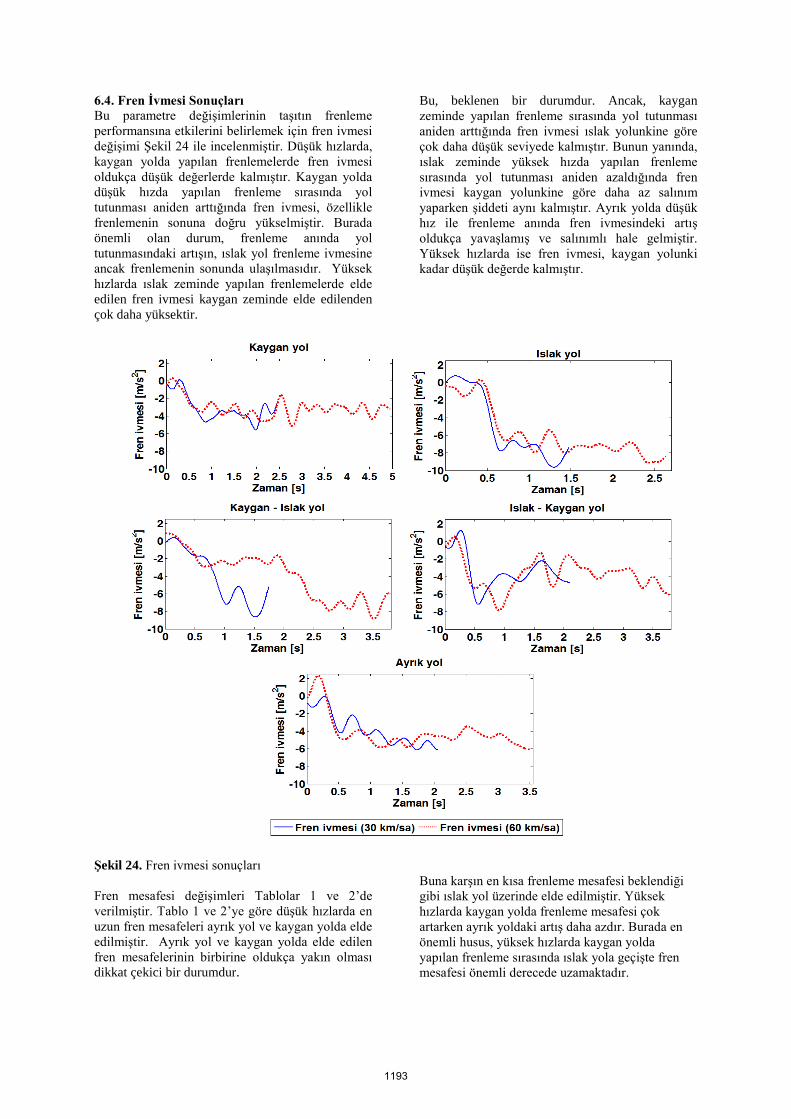
6.4. Fren İvmesi Sonuçları Bu parametre değişimlerinin taşıtın frenleme performansına etkilerini belirlemek için fren ivmesi değişimi Şekil 24 ile incelenmiştir. Düşük hızlarda, kaygan yolda yapılan frenlemelerde fren ivmesi oldukça düşük değerlerde kalmıştır. Kaygan yolda düşük hızda yapılan frenleme sırasında yol tutunması aniden arttığında fren ivmesi, özellikle frenlemenin sonuna doğru yükselmiştir. Burada önemli olan durum, frenleme anında yol tutunmasındaki artışın, ıslak yol frenleme ivmesine ancak frenlemenin sonunda ulaşılmasıdır. Yüksek hızlarda ıslak zeminde yapılan frenlemelerde elde edilen fren ivmesi kaygan zeminde elde edilenden çok daha yüksektir.
Şekil 24. Fren ivmesi sonuçları
Fren mesafesi değişimleri Tablolar 1 ve 2’de verilmiştir. Tablo 1 ve 2’ye göre düşük hızlarda en uzun fren mesafeleri ayrık yol ve kaygan yolda elde edilmiştir. Ayrık yol ve kaygan yolda elde edilen fren mesafelerinin birbirine oldukça yakın olması dikkat çekici bir durumdur.
Bu, beklenen bir durumdur. Ancak, kaygan zeminde yapılan frenleme sırasında yol tutunması aniden arttığında fren ivmesi ıslak yolunkine göre çok daha düşük seviyede kalmıştır. Bunun yanında, ıslak zeminde yüksek hızda yapılan frenleme sırasında yol tutunması aniden azaldığında fren ivmesi kaygan yolunkine göre daha az salınım yaparken şiddeti aynı kalmıştır. Ayrık yolda düşük hız ile frenleme anında fren ivmesindeki artış oldukça yavaşlamış ve salınımlı hale gelmiştir. Yüksek hızlarda ise fren ivmesi, kaygan yolunki kadar düşük değerde kalmıştır.
Buna karşın en kısa frenleme mesafesi beklendiği gibi ıslak yol üzerinde elde edilmiştir. Yüksek hızlarda kaygan yolda frenleme mesafesi çok artarken ayrık yoldaki artış daha azdır. Burada en önemli husus, yüksek hızlarda kaygan yolda yapılan frenleme sırasında ıslak yola geçişte fren mesafesi önemli derecede uzamaktadır.
1193
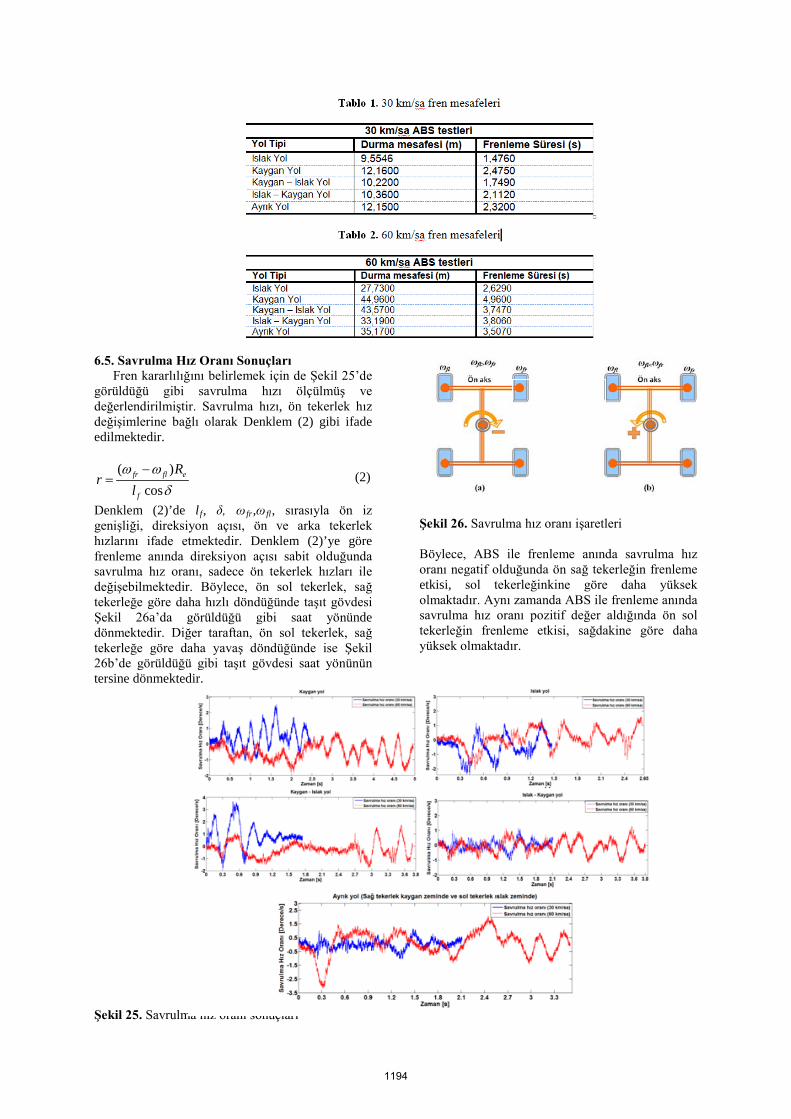
6.5. Savrulma Hız Oranı Sonuçları Fren kararlılığını belirlemek için de Şekil 25’de
görüldüğü gibi savrulma hızı ölçülmüş ve değerlendirilmiştir. Savrulma hızı, ön tekerlek hız değişimlerine bağlı olarak Denklem (2) gibi ifade edilmektedir.
( )cos
fr fl e
f
Rr
lω ω
δ−
= (2)
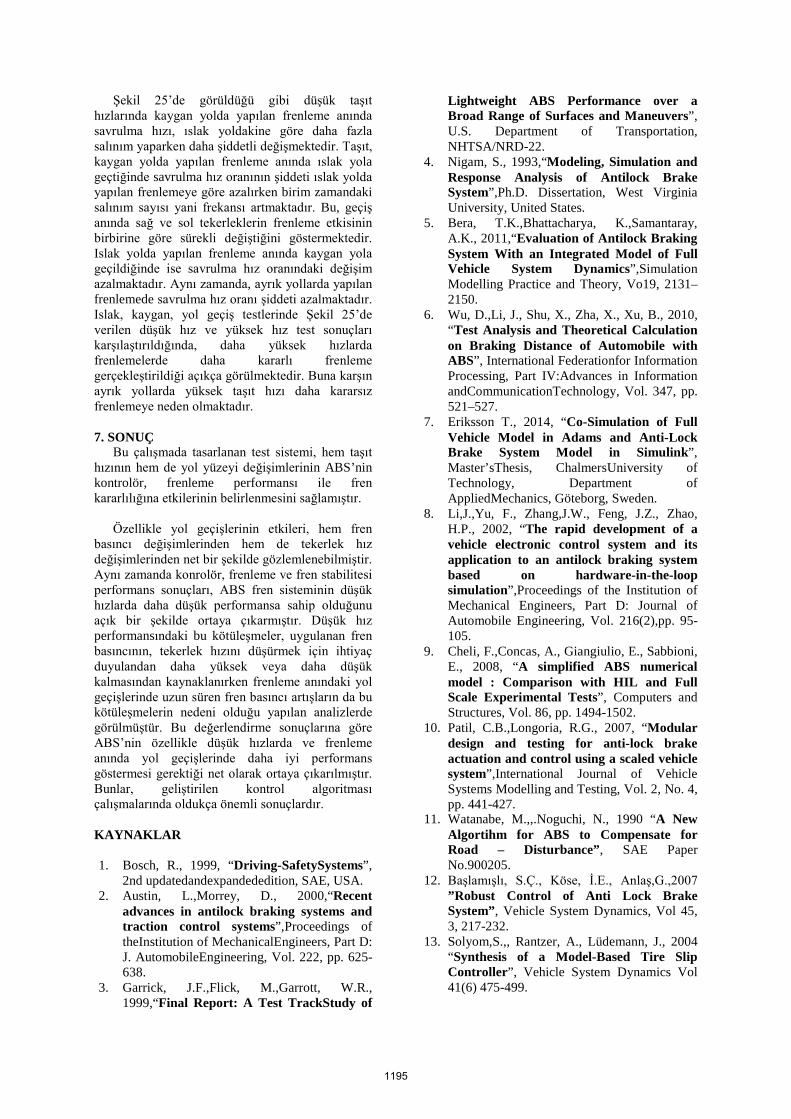
Denklem (2)’de lf, δ, ω fr,ω fl, sırasıyla ön iz genişliği, direksiyon açısı, ön ve arka tekerlek hızlarını ifade etmektedir. Denklem (2)’ye göre frenleme anında direksiyon açısı sabit olduğunda savrulma hız oranı, sadece ön tekerlek hızları ile değişebilmektedir. Böylece, ön sol tekerlek, sağ tekerleğe göre daha hızlı döndüğünde taşıt gövdesi Şekil 26a’da görüldüğü gibi saat yönünde dönmektedir. Diğer taraftan, ön sol tekerlek, sağ tekerleğe göre daha yavaş döndüğünde ise Şekil 26b’de görüldüğü gibi taşıt gövdesi saat yönünün tersine dönmektedir.
Şekil 25. Savrulma hız oranı sonuçları
Şekil 26. Savrulma hız oranı işaretleri
Böylece, ABS ile frenleme anında savrulma hız oranı negatif olduğunda ön sağ tekerleğin frenleme etkisi, sol tekerleğinkine göre daha yüksek olmaktadır. Aynı zamanda ABS ile frenleme anında savrulma hız oranı pozitif değer aldığında ön sol tekerleğin frenleme etkisi, sağdakine göre daha yüksek olmaktadır.
1194
Şekil 25’de görüldüğü gibi düşük taşıt hızlarında kaygan yolda yapılan frenleme anında savrulma hızı, ıslak yoldakine göre daha fazla salınım yaparken daha şiddetli değişmektedir. Taşıt, kaygan yolda yapılan frenleme anında ıslak yola geçtiğinde savrulma hız oranının şiddeti ıslak yolda yapılan frenlemeye göre azalırken birim zamandaki salınım sayısı yani frekansı artmaktadır. Bu, geçiş anında sağ ve sol tekerleklerin frenleme etkisinin birbirine göre sürekli değiştiğini göstermektedir. Islak yolda yapılan frenleme anında kaygan yola geçildiğinde ise savrulma hız oranındaki değişim azalmaktadır. Aynı zamanda, ayrık yollarda yapılan frenlemede savrulma hız oranı şiddeti azalmaktadır. Islak, kaygan, yol geçiş testlerinde Şekil 25’de verilen düşük hız ve yüksek hız test sonuçları karşılaştırıldığında, daha yüksek hızlarda frenlemelerde daha kararlı frenleme gerçekleştirildiği açıkça görülmektedir. Buna karşın ayrık yollarda yüksek taşıt hızı daha kararsız frenlemeye neden olmaktadır.
7. SONUÇBu çalışmada tasarlanan test sistemi, hem taşıt
hızının hem de yol yüzeyi değişimlerinin ABS’nin kontrolör, frenleme performansı ile fren kararlılığına etkilerinin belirlenmesini sağlamıştır.
Özellikle yol geçişlerinin etkileri, hem fren basıncı değişimlerinden hem de tekerlek hız değişimlerinden net bir şekilde gözlemlenebilmiştir. Aynı zamanda konrolör, frenleme ve fren stabilitesi performans sonuçları, ABS fren sisteminin düşük hızlarda daha düşük performansa sahip olduğunu açık bir şekilde ortaya çıkarmıştır. Düşük hız performansındaki bu kötüleşmeler, uygulanan fren basıncının, tekerlek hızını düşürmek için ihtiyaç duyulandan daha yüksek veya daha düşük kalmasından kaynaklanırken frenleme anındaki yol geçişlerinde uzun süren fren basıncı artışların da bu kötüleşmelerin nedeni olduğu yapılan analizlerde görülmüştür. Bu değerlendirme sonuçlarına göre ABS’nin özellikle düşük hızlarda ve frenleme anında yol geçişlerinde daha iyi performans göstermesi gerektiği net olarak ortaya çıkarılmıştır. Bunlar, geliştirilen kontrol algoritması çalışmalarında oldukça önemli sonuçlardır.
KAYNAKLAR
1. Bosch, R., 1999, “Driving-SafetySystems”,2nd updatedandexpandededition, SAE, USA.
2. Austin, L.,Morrey, D., 2000,“Recentadvances in antilock braking systems andtraction control systems”,Proceedings oftheInstitution of MechanicalEngineers, Part D:J. AutomobileEngineering, Vol. 222, pp. 625-638.
3. Garrick, J.F.,Flick, M.,Garrott, W.R.,1999,“Final Report: A Test TrackStudy of
Lightweight ABS Performance over a Broad Range of Surfaces and Maneuvers”, U.S. Department of Transportation, NHTSA/NRD-22.
4. Nigam, S., 1993,“Modeling, Simulation andResponse Analysis of Antilock BrakeSystem”,Ph.D. Dissertation, West VirginiaUniversity, United States.
5. Bera, T.K.,Bhattacharya, K.,Samantaray,A.K., 2011,“Evaluation of Antilock BrakingSystem With an Integrated Model of FullVehicle System Dynamics”,SimulationModelling Practice and Theory, Vo19, 2131–2150.
6. Wu, D.,Li, J., Shu, X., Zha, X., Xu, B., 2010,“Test Analysis and Theoretical Calculationon Braking Distance of Automobile withABS”, International Federationfor InformationProcessing, Part IV:Advances in InformationandCommunicationTechnology, Vol. 347, pp.521–527.
7. Eriksson T., 2014, “Co-Simulation of FullVehicle Model in Adams and Anti-LockBrake System Model in Simulink”,Master’sThesis, ChalmersUniversity ofTechnology, Department ofAppliedMechanics, Göteborg, Sweden.
8. Li,J.,Yu, F., Zhang,J.W., Feng, J.Z., Zhao,H.P., 2002, “The rapid development of avehicle electronic control system and itsapplication to an antilock braking systembased on hardware-in-the-loopsimulation”,Proceedings of the Institution ofMechanical Engineers, Part D: Journal ofAutomobile Engineering, Vol. 216(2),pp. 95-105.
9. Cheli, F.,Concas, A., Giangiulio, E., Sabbioni,E., 2008, “A simplified ABS numericalmodel : Comparison with HIL and FullScale Experimental Tests”, Computers andStructures, Vol. 86, pp. 1494-1502.
10. Patil, C.B.,Longoria, R.G., 2007, “Modulardesign and testing for anti-lock brakeactuation and control using a scaled vehiclesystem”,International Journal of VehicleSystems Modelling and Testing, Vol. 2, No. 4,pp. 441-427.
11. Watanabe, M.,,.Noguchi, N., 1990 “A NewAlgortihm for ABS to Compensate forRoad – Disturbance”, SAE PaperNo.900205.
12. Başlamışlı, S.Ç., Köse, İ.E., Anlaş,G.,2007”Robust Control of Anti Lock BrakeSystem”, Vehicle System Dynamics, Vol 45,3, 217-232.
13. Solyom,S.,, Rantzer, A., Lüdemann, J., 2004“Synthesis of a Model-Based Tire SlipController”, Vehicle System Dynamics Vol41(6) 475-499.
1195