me 143: mechanics of machinery-1aly/courses/me143/01_introd.pdf · me 143: mechanics of machinery-1...
TRANSCRIPT
ME 143: Mechanics of Machinery-1
Lecture 1
Introduction
Dr. Aly Mousaad Aly
Mechanical Engineering Department
Faculty of Engineering, Alexandria University
Policy
• Class attendance is very important.
• Come to the exercises prepared (your notes +
sketch + sheet + ruler + aristo + pencil +
eraser)
• If you don’t come, your class grade is zero
• You cannot be absent for more than 25%
Lecture 1, AM Aly 2
Grading
• Final project (20 Marks)
• Oral exam (10 Marks)
• Midterm exam (30 Marks)
• Final examination (90 Marks)
Lecture 1, AM Aly 3

Course objectives
• Develop the student's ability to analyze and
design planar machines.
• Analyzing motion of elements in machines
(disp., vel., acc., and forces).
• Understanding the terminology and
parameters of gears.
• Understanding various gear trains.
Lecture 1, AM Aly 4
Course Materials
Lecture Slides:
Will be available at the copy center + any other materials
References and Resources:
• R.S. Khurmi, J.K. Gupta "Theory of Machines"Chand (S.) & Co Ltd ,India, 2005
• Robert L. Norton "Design of Machinery”, 2nd ed, McGraw-Hill, 1999
Lecture 1, AM Aly 5
Course contents
• Joints
• Mechanisms
• Degrees of freedom
• Analysis of some applied mechanisms
• Graphical and analytical analyses of displacement, velocity and acceleration
• Gear geometry
• Gear trains
Lecture 1, AM Aly 6
What is Theory of Machines?
It is a branch of Engineering - Science, which
deals with the study of relative motion
between the various parts of machine, and
forces which act on them.
Knowledge of this subject is very essential for
an engineer in designing the various parts of a
machine.
Lecture 1, AM Aly 7
Sub-Divisions of Theory of Machines
Kinematics: describes the motion of bodies
without consideration of the forces that cause
the motion (i.e. disp., vel., acc.).
Dynamics:
a. Kinetics: describes the relation between
forces and motion (ma).
b. Statics: describes the relation between forces
at rest.
Lecture 1, AM Aly 8
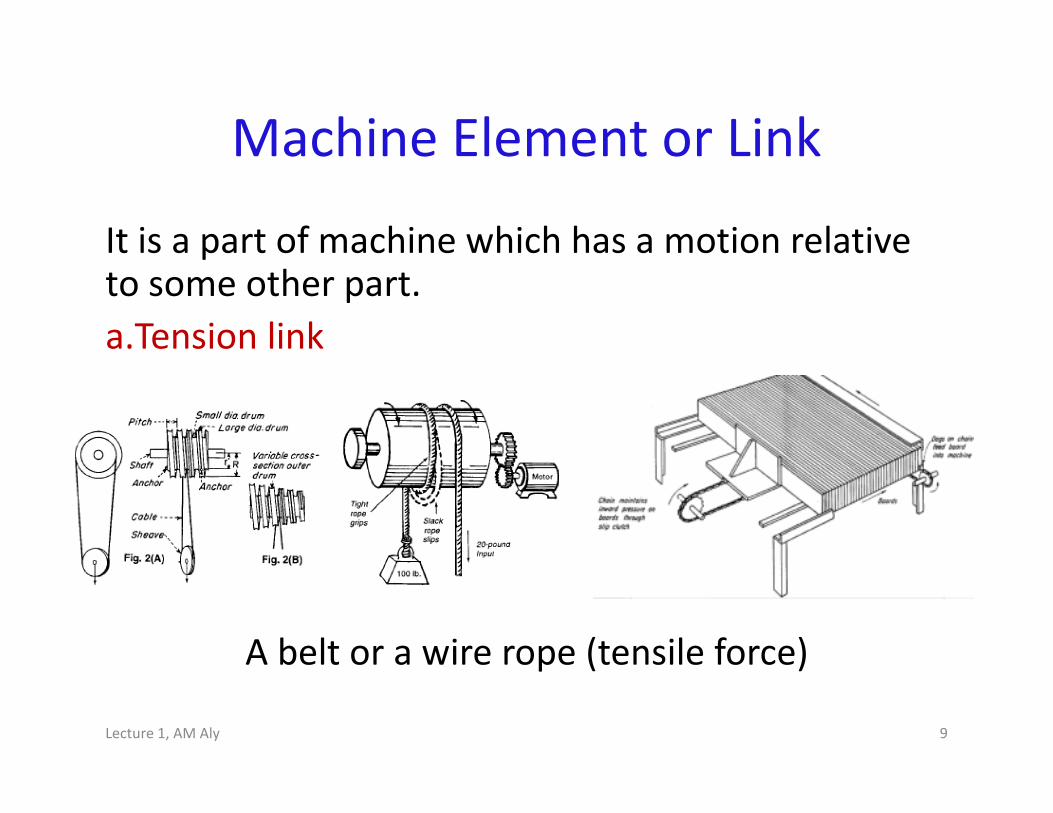
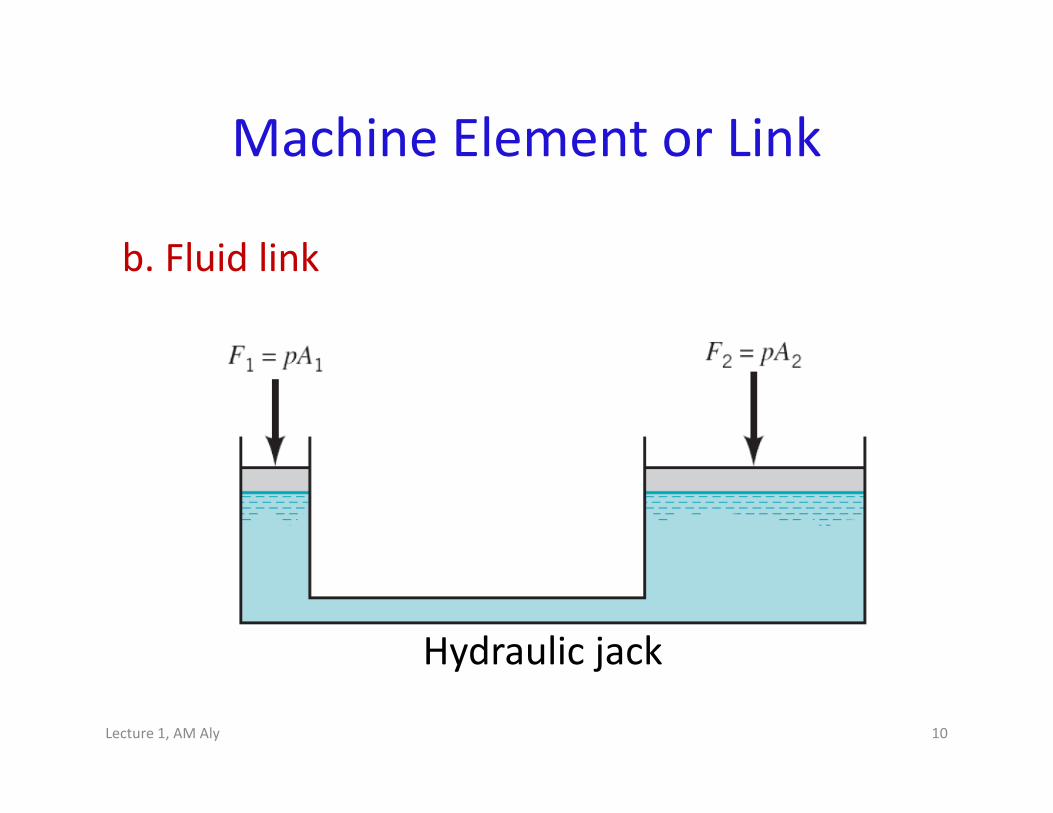
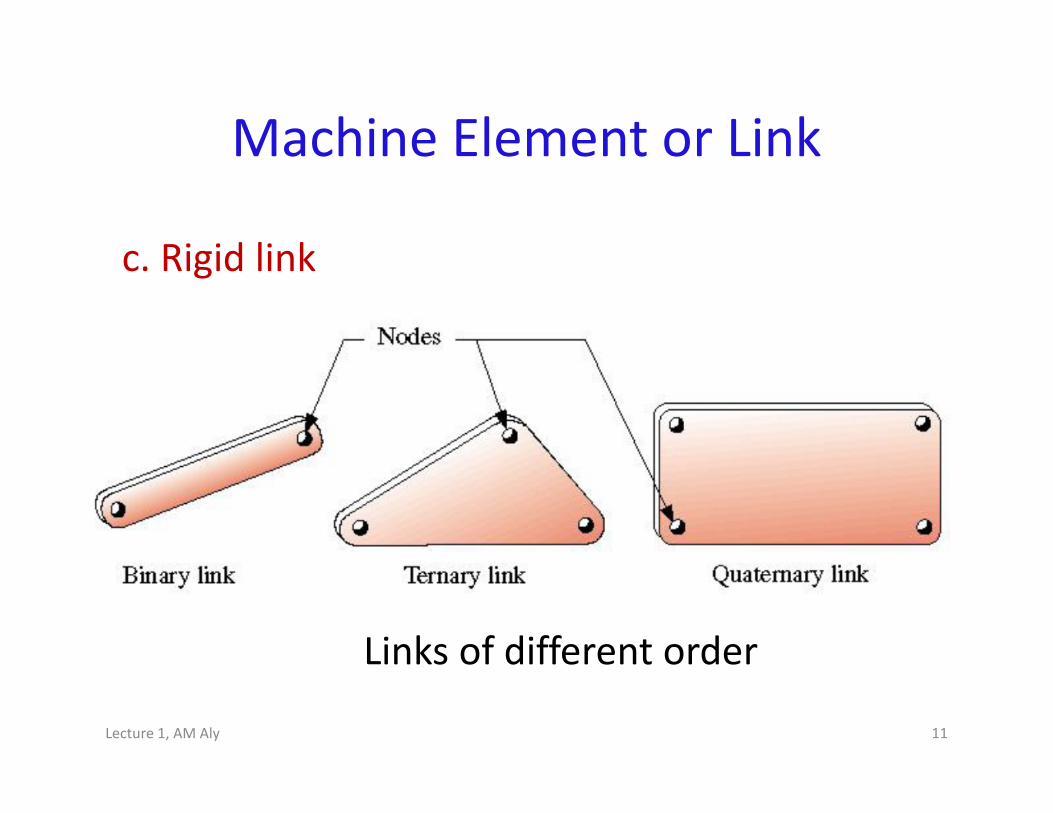
Machine Element or Link
It is a part of machine which has a motion relative to some other part.
a.Tension link
A belt or a wire rope (tensile force)
Lecture 1, AM Aly 9
Machine Element or Link
Lecture 1, AM Aly 10
b. Fluid link
Hydraulic jack
Machine Element or Link
Lecture 1, AM Aly 11
c. Rigid link
Links of different order

Kinematic Pairs: Lower Pairs
One relative motion
Sliding pair turning pair
pure rolling screw pair
Lecture 1, AM Aly 12
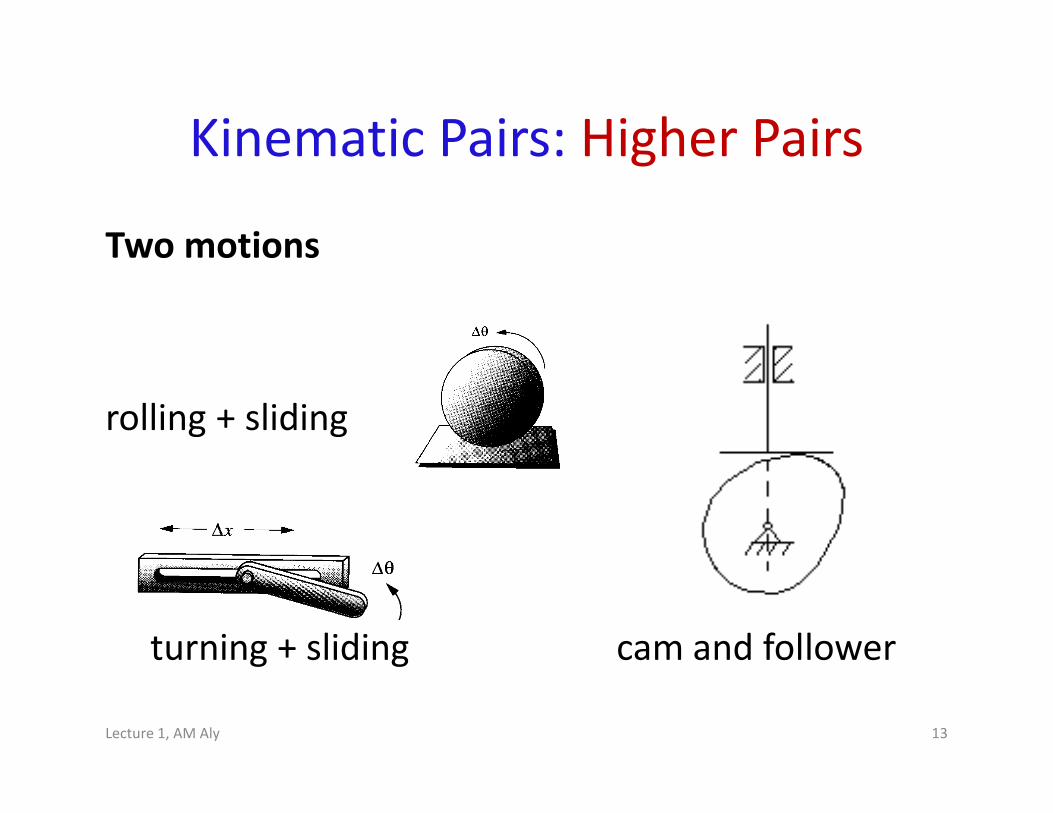
Kinematic Pairs: Higher Pairs
Two motions
rolling + sliding
turning + sliding cam and follower
Lecture 1, AM Aly 13
Kinematic chain
An assemblage of links and joints,
interconnected in a way to provide a
controlled output motion in response to a
supplied input motion.
Lecture 1, AM Aly 14

Mechanism
A kinematic chain in which at least one link
has been "grounded," or attached, to th frame
of reference (which itself may be in motion).
Lecture 1, AM Aly 15
Machine
A collection of mechanisms arranged to transmit
forces and to do work.
Lecture 1, AM Aly 16
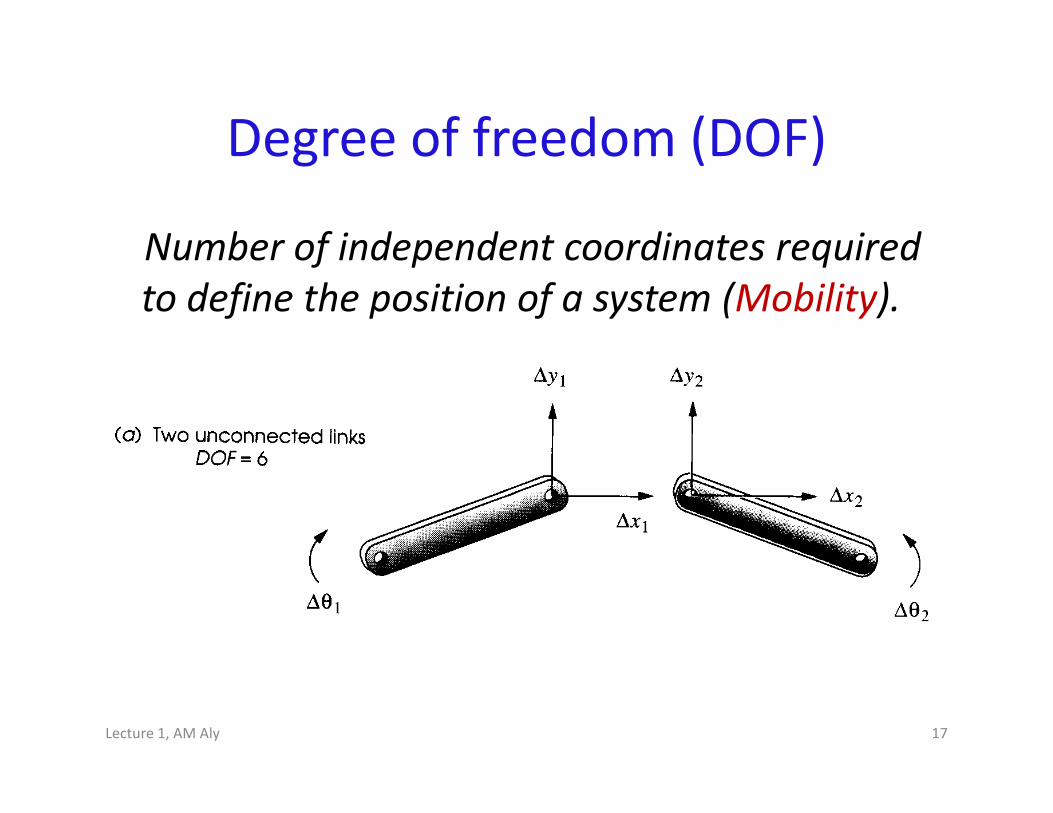
Degree of freedom (DOF)
Number of independent coordinates required
to define the position of a system (Mobility).
Lecture 1, AM Aly 17
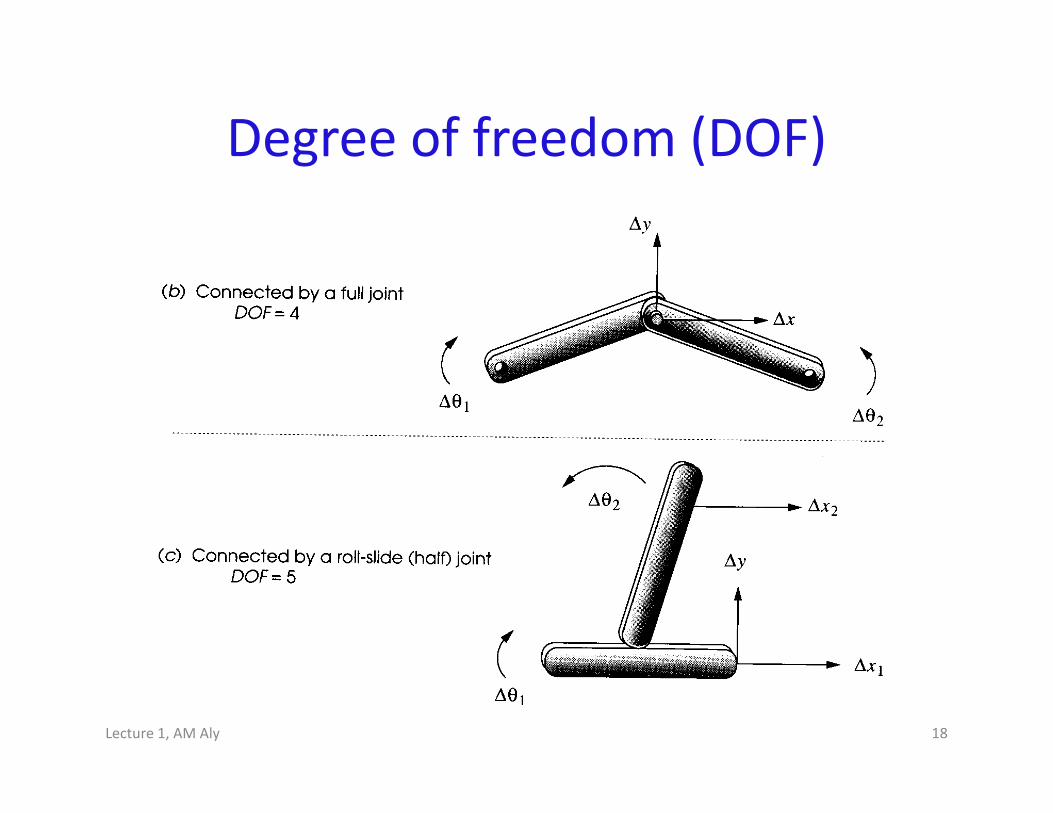
Degree of freedom (DOF)
Lecture 1, AM Aly 18
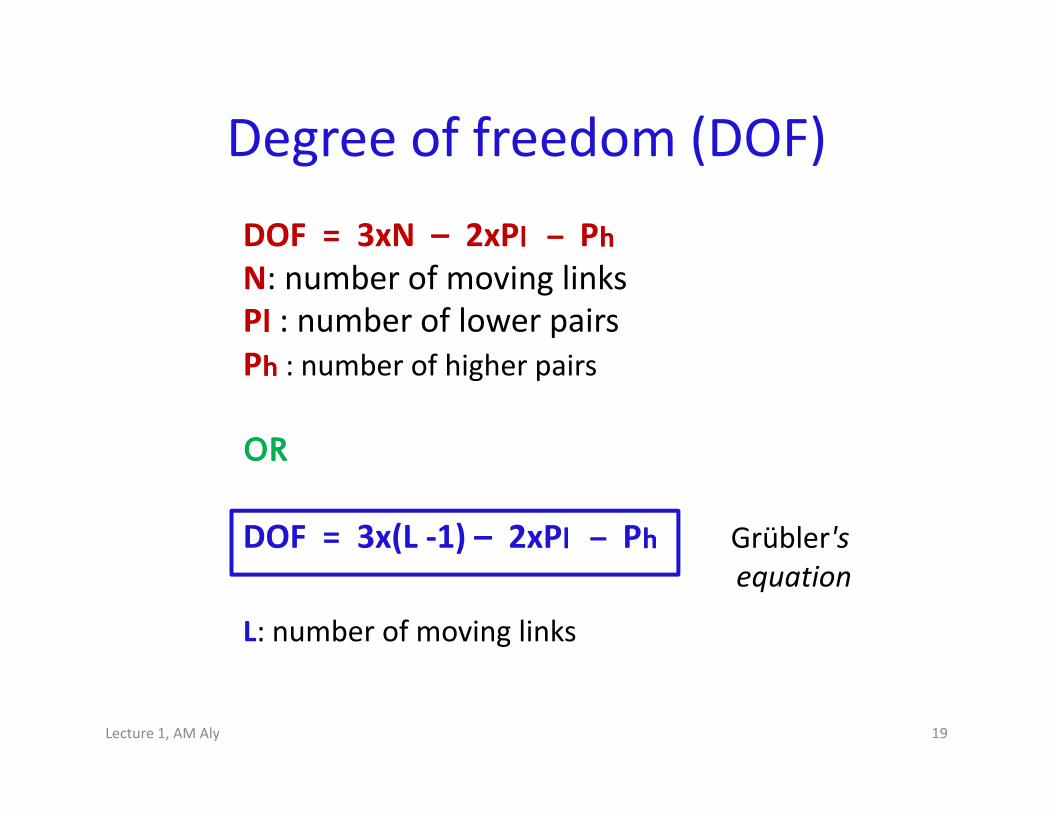
Degree of freedom (DOF)
DOF = 3xN – 2xPl l l l – Phhhh
N: number of moving links
Pllll : number of lower pairs
Phhhh : number of higher pairs
OROROROR
DOF = 3x(L -1) – 2xPl l l l – Ph h h h Grübler's
equation
L: number of moving links
Lecture 1, AM Aly 19
Mobility
• The mobility is the number of input parameters (usually pair variables) that must be independently controlled to bring the device into a particular position.
• The Kutzbach criterion, which is similar to Gruebler's equation, calculates the mobility.
• In order to control a mechanism, the number of independent input motions must equal the number of degrees of freedom of the mechanism.
Lecture 1, AM Aly 20

Example
L = 4
Pl = 4
Ph = 0
DOF = 3x(L -1) – 2xPl – Ph
DOF = 3x(4 -1) – 2x4 – 0
= 1
Lecture 1, AM Aly 21
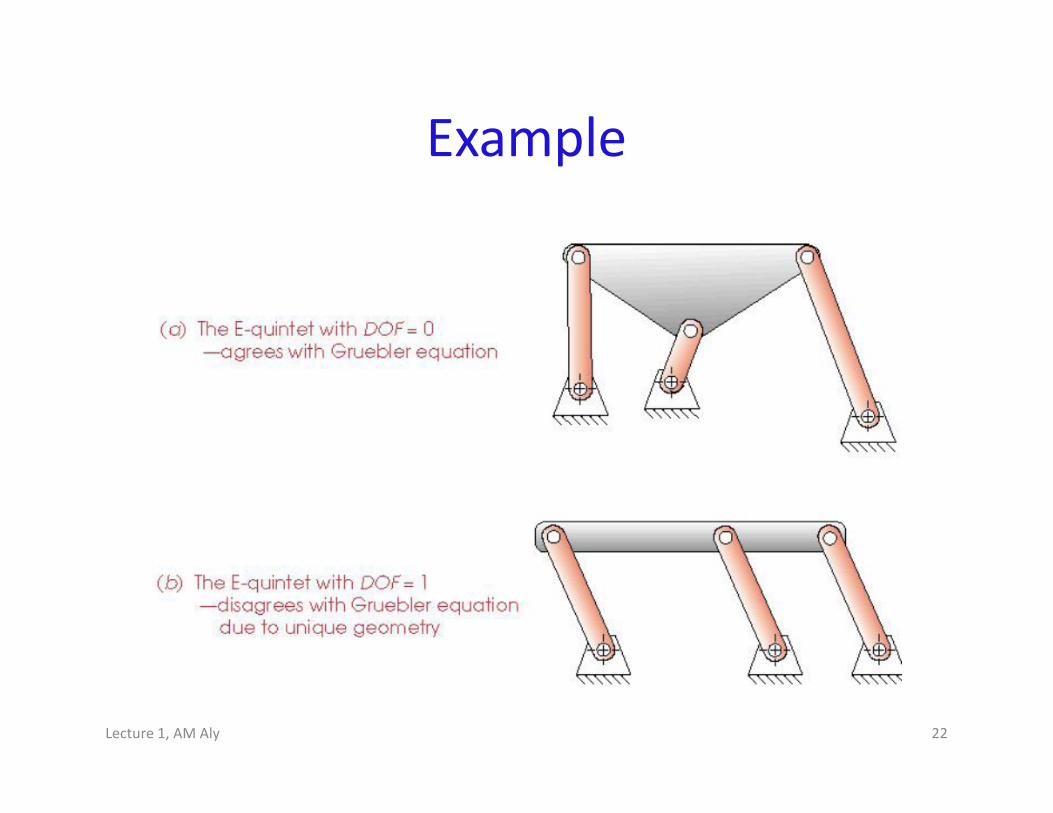
Example
Lecture 1, AM Aly 22
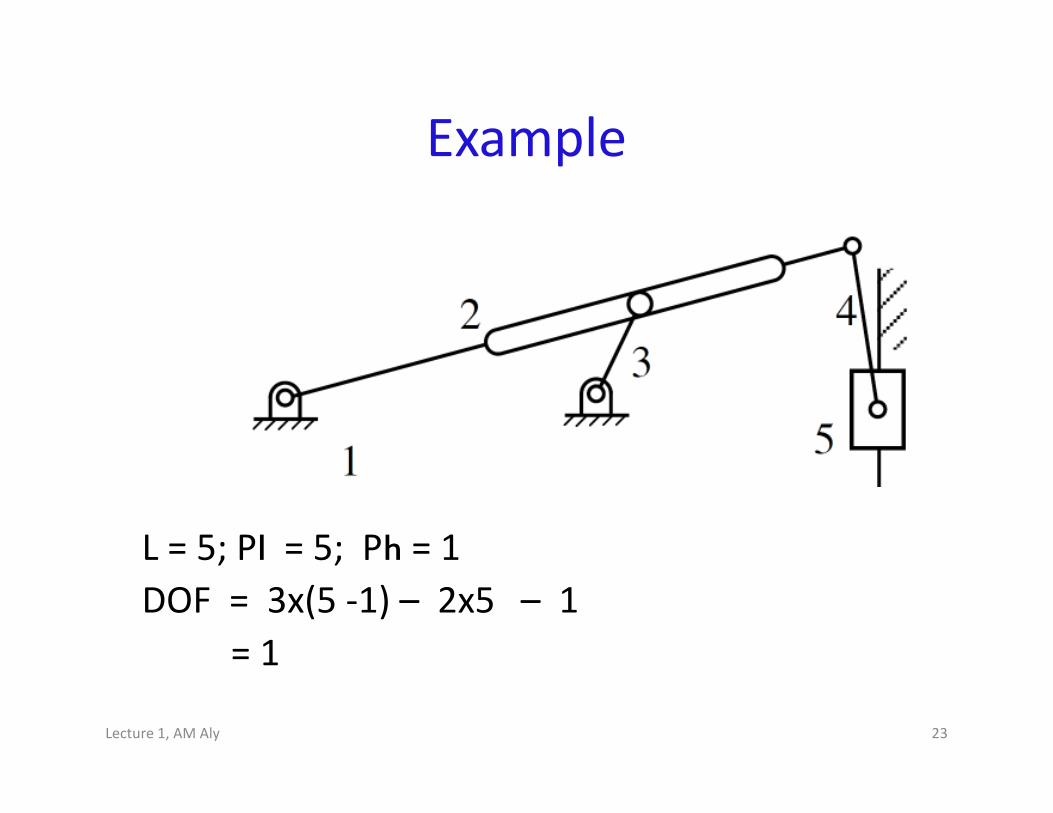
Example
L = 5; Pl = 5; Ph = 1
DOF = 3x(5 -1) – 2x5 – 1
= 1
Lecture 1, AM Aly 23
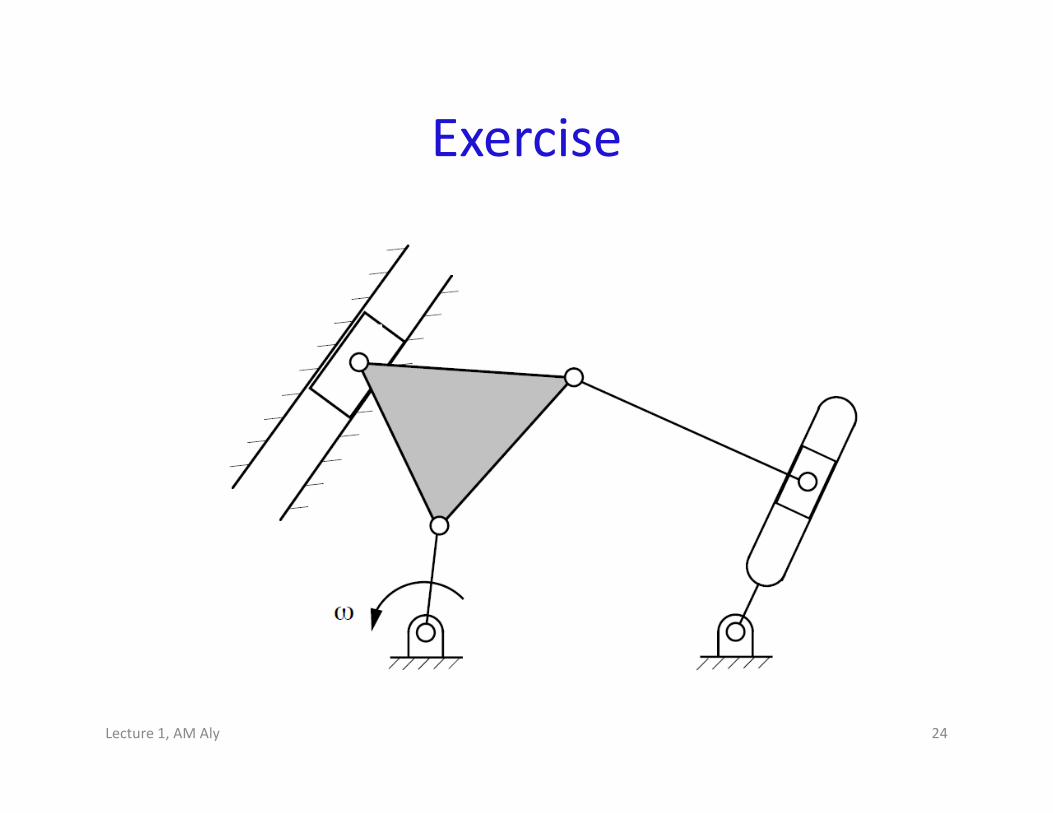
Exercise
Lecture 1, AM Aly 24