modellazione e implementazione numerica di un motore a ... · di un motore a turbina per elicottero...
TRANSCRIPT

Politecnico di Milano
FACOLTA DI INGEGNERIA INDUSTRIALE
Corso di Laurea Magistrale in Ingegneria Aeronautica
Tesi di laurea magistrale
Modellazione e implementazione numericadi un motore a turbina per elicottero
In collaborazione con AgustaWestland
Candidato:
Michele CappuccilliMatricola 761325
Relatore:
Prof. Lorenzo Trainelli
Correlatori:
Ing. Riccardo Bianco MengottiDott. Domenico Leonello
Anno Accademico 2011–2012


Indice
1 Inquadramento e finalita 131.1 Propulsione negli elicotteri . . . . . . . . . . . . . . . . . . . . 13
1.1.1 Componenti tipici del motore per elicotteri . . . . . . . 131.1.2 Ciclo termodinamico . . . . . . . . . . . . . . . . . . . 171.1.3 Componenti connessi al propulsore . . . . . . . . . . . 18
1.2 Finalita del lavoro di tesi . . . . . . . . . . . . . . . . . . . . . 19
2 Stato dell’arte 212.1 Modellazione di motori a turbina . . . . . . . . . . . . . . . . 212.2 Software esistenti . . . . . . . . . . . . . . . . . . . . . . . . . 23
3 Fisica del problema e modellazione 273.1 Modellazione delle turbomacchine . . . . . . . . . . . . . . . . 273.2 Proprieta dei fluidi . . . . . . . . . . . . . . . . . . . . . . . . 293.3 Componenti del modello . . . . . . . . . . . . . . . . . . . . . 33
3.3.1 Presa d’aria . . . . . . . . . . . . . . . . . . . . . . . . 353.3.2 Compressore . . . . . . . . . . . . . . . . . . . . . . . . 373.3.3 Plenum . . . . . . . . . . . . . . . . . . . . . . . . . . 383.3.4 Combustore . . . . . . . . . . . . . . . . . . . . . . . . 413.3.5 Turbina generatrice di gas . . . . . . . . . . . . . . . . 433.3.6 Turbina di potenza . . . . . . . . . . . . . . . . . . . . 443.3.7 Modello di carico semplificato . . . . . . . . . . . . . . 453.3.8 Dinamica degli alberi di trasmissione . . . . . . . . . . 48
3.4 Dinamica del sistema e metodo di soluzione . . . . . . . . . . 493.5 Parametrizzazione . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.5.1 Esempio di adattamento delle mappe per un genericomotore . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4 Implementazione 594.1 Requisiti del codice . . . . . . . . . . . . . . . . . . . . . . . . 594.2 Genesi e struttura del codice Matlab . . . . . . . . . . . . . . 60
3

4 INDICE
4.2.1 Modello γ - Matlab . . . . . . . . . . . . . . . . . . . . 614.2.2 Modello ISO - Matlab . . . . . . . . . . . . . . . . . . 654.2.3 Funzioni di supporto . . . . . . . . . . . . . . . . . . . 68
4.3 Struttura del codice C . . . . . . . . . . . . . . . . . . . . . . 694.3.1 Funzione Principale: EngineModel . . . . . . . . . . . 704.3.2 Funzioni di supporto . . . . . . . . . . . . . . . . . . . 72
4.4 Metodo di soluzione e di integrazione . . . . . . . . . . . . . . 734.5 Interfaccia grafica . . . . . . . . . . . . . . . . . . . . . . . . . 744.6 DLL - Dinamic Link Library . . . . . . . . . . . . . . . . . . . 754.7 GSL - Gnu Scientific Libraries . . . . . . . . . . . . . . . . . . 76
5 Validazione 775.1 Confronto con dati sperimentali a regime . . . . . . . . . . . . 775.2 Validazione dinamica: risposta ad un gradino di portata di
combustibile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6 Controllore automatico del propulsore 876.1 Architettura e logica di controllo . . . . . . . . . . . . . . . . 87
6.1.1 Limiti di impiego del motore . . . . . . . . . . . . . . . 906.2 Implementazione . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.2.1 Implementazione in linguaggio Matlab . . . . . . . . . 926.3 Simulazioni del motore in anello chiuso . . . . . . . . . . . . . 94
6.3.1 Simulazione 1 - controllore proporzionale . . . . . . . 946.3.2 Simulazione 1 - controllore PI . . . . . . . . . . . . . . 976.3.3 Simulazione 1 - controllore PID . . . . . . . . . . . . . 976.3.4 Simulazione 2 - controllore proporzionale . . . . . . . . 1016.3.5 Simulazione 2 - controllore PI . . . . . . . . . . . . . . 1036.3.6 Simulazione 2 - controllore PID . . . . . . . . . . . . . 104
7 Simulazione di una manovra 1077.1 Illustrazione della manovra e software impiegati . . . . . . . . 1077.2 Confronto utilizzando alcuni parametri del motore GE t700 . . 1097.3 Confronto utilizzando parametri identificati . . . . . . . . . . 112
8 Conclusioni e sviluppi futuri 1178.1 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1178.2 Sviluppi futuri . . . . . . . . . . . . . . . . . . . . . . . . . . . 118

Elenco delle figure
1.1 Schema semplificato di motore turbo-albero connesso a tra-smissione e rotore. . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2 Schema di ciclo joule Brayton ideale nel piano T-S. . . . . . . 17
1.3 Ciclo Joule-Brayton reale nel piano T-S. . . . . . . . . . . . . 18
2.1 Il motore General Electric t700. . . . . . . . . . . . . . . . . . 22
3.1 Variazione della costante dei gas R in funzione della tempera-tura per i gas combusti di kerosene. . . . . . . . . . . . . . . . 30
3.2 Calore specifico dei gas ottenuti dalla combustione di kerosenein funzione della temperatura per diversi rapporti aria/combustibile. 31
3.3 Rapporto fra calori specifici del kerosene in funzione di tem-peratura e rapporto aria/combustibile. . . . . . . . . . . . . . 32
3.4 Rapporto fra calori specifici k dell’aria e dei gas combusti dikerosene con rapporto aria/combustibile di 1
35ottenuto con il
modello di Guha. . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.5 Calore specifico cp dell’aria e dei gas combusti con rapportoaria/combustibile di 1
35, ottenuto con il modello di Guha per
un ampio intervallo di temperature. . . . . . . . . . . . . . . . 34
3.6 Calore specifico di aria e gas combusti ottenuto con modellodi Walsh, con FAR=1/35. . . . . . . . . . . . . . . . . . . . . 35
3.7 Schema del motore e flusso di informazioni fra i vari componenti. 36
3.8 Pala di rotore semplificata. . . . . . . . . . . . . . . . . . . . . 46
3.9 Potenza richiesta dal carico modellato in funzione della veloci-ta di rotazione n2 confrontata con i valori di potenza e velocitadi rotazione nominali per il motore GE t700. . . . . . . . . . . 48
3.10 Diagramma di flusso per il processo di generazione e adatta-mento delle mappe delle turbomacchine. . . . . . . . . . . . . 51
3.11 Rapporti di compressione/espansione normalizzati. . . . . . . 54
3.12 Mappa normalizzata della portata d’aria elaborata dal com-pressore (g2) in funzione del regime di rotazione n1. . . . . . . 55
5

6 ELENCO DELLE FIGURE
3.13 Mappa normalizzata del rapporto di espansione della turbi-na di potenza in funzione della temperatura in uscita dallaturbina HPT. . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.14 Mappa dei βcompressore e βHPT adattata ad un generico motore. 56
3.15 Mappa (adattata ad un ipotetico motore) della portata d’a-ria elaborata dal compressore (g2) in funzione del regime dirotazione n1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.16 Mappa (adattata ad un ipotetico motore) del rapporto di espan-sione della turbina di potenza in funzione della temperaturain uscita dalla turbina HPT. . . . . . . . . . . . . . . . . . . . 57
4.1 Schema del codice γ implementato in Matlab. . . . . . . . . . 62
4.2 Mappa della temperatura in uscita dal compressore in funzionedel regime di rotazione n1 nel modello γ per il motore GE t700. 63
4.3 Schema delle funzioni implementate nel codice ISO. . . . . . . 67
4.4 Funzione EngineModel.c : ingressi e uscite. . . . . . . . . . . . 72
5.1 Andamento dell’ingresso di portata di combustibile a gradino. 83
5.2 Risposta ad un ingresso a gradino di portata di combustibile:confronto del regime di rotazione n1 con i dati del report Ballin- 1988. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.3 Risposta ad un ingresso a gradino di portata di combustibile:confronto della pressione all’uscita dal compressore p21 con idati del report Ballin - 1988. . . . . . . . . . . . . . . . . . . . 84
5.4 Risposta ad un ingresso a gradino di portata di combustibi-le: confronto dellla temperatura T3 in uscita dalla camera dicombustione con i dati del report Ballin - 1988. . . . . . . . . 85
5.5 Risposta ad un ingresso a gradino di portata di combustibile:confronto dellla temperatura T4 in uscita dalla turbina di altapressione con i dati del report Ballin - 1988. . . . . . . . . . . 85
6.1 Architettura di un sistema di controllo di un motore a turbinaper elicotteri. . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.2 Logica di controllo del regolatore PID implementato all’inter-no del FADEC. . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.3 Sistema motore-controllore in anello chiuso. . . . . . . . . . . 92
6.4 Struttura del controllore FADEC nell’implementazione in lin-guaggio Matlab. . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.5 Simulazione 1 con controllore P. Velocita di rotazione dei duealberi e variabile di controllo gb. . . . . . . . . . . . . . . . . . 96

ELENCO DELLE FIGURE 7
6.6 Simulazione 1 con controllore Proporzionale.Velocita angolaredell’albero della turbina di potenza. Confronto con il riferi-mento da inseguire. . . . . . . . . . . . . . . . . . . . . . . . . 96
6.7 Inseguimento del riferimento di velocita di rotazione costantecon controllore PI. . . . . . . . . . . . . . . . . . . . . . . . . 98
6.8 Simulazione 1 con controllore PI. Andamento dei due sta-ti meccanici e della variabile di controllo durante il primosecondo di simulazione. . . . . . . . . . . . . . . . . . . . . . . 98
6.9 Velocita di rotazione n1, n2 e portata di combustibile gb duran-te l’inseguimento del riferimento costante n2ref con controlloredi tipo PI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.10 Simulazione 1 con controllore PID. inseguimento del riferimen-to sulla velocita di rotazione n2. . . . . . . . . . . . . . . . . . 99
6.11 Simulazione 1 con controllore PID. Velocita di rotazione eportata di combustibile durante la simulazione. . . . . . . . . 100
6.12 Simulazione 1 con controllore PID. Particolare del primo se-condo di simulazione. . . . . . . . . . . . . . . . . . . . . . . . 100
6.13 Inseguimento del riferimento da parte del sistema motore -controllore in anello chiuso. Simulazione 2. Controllore soloproporzionale. . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6.14 Velocita di rotazione dei due alberi e flusso di carburante incamera di combustione durante la simulazione 2 di insegui-mento di un riferimento variabile di n2 con motore controllatoda un regolatore proporzionale. . . . . . . . . . . . . . . . . . 102
6.15 Simulazione 2 con controllore PI. Inseguimento del riferimentovariabile n2REF
. . . . . . . . . . . . . . . . . . . . . . . . . . . 1036.16 Simulazione 2 con controllore PI. Andamento dei due stati
meccanici n1, n2 e della variabile di controllo gb. . . . . . . . . 1046.17 Simulazione 2 con controllore PID. Inseguimento del riferimen-
to variabile di velocita di rotazione n2. . . . . . . . . . . . . . 1056.18 Simulazione 2 con controllore PID. Storia temporale dei due
stati meccanici n1 ed n2 e della variabile di contollo gb durantela simulazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
7.1 Storia temporale della portata di combustibile gb durante la si-mulazione effettuata in Flighlab e poi riprodotta con il modelloISO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.2 Confronto fra la velocita di rotazione n1 calcolata dal modelloISO e quella ottenuta dalla simulazione in Flightlab. Si riportaanche il valore nominale per il motore considerato. Parametriincogniti derivati dal motore GE t700. . . . . . . . . . . . . . 110

8 ELENCO DELLE FIGURE
7.3 Confronto della temperatura T4 dei gas fra le due turbine cal-colata con il modello ISO e il software Flightlab.Parametriincogniti derivati dal motore GE t700. . . . . . . . . . . . . . 111
7.4 Potenza espressa dal modello ISO confrontata con quella espres-sa dal modello FlightLab. Per i parametri incogniti si e fattoricorso a quelli del motore GE t700. . . . . . . . . . . . . . . . 112
7.5 Confronto della temperatura T4. Modello ISO con parametrimodificati e simulazione FlightLab. . . . . . . . . . . . . . . . 114
7.6 Confronto sulla velocita n1. Simulazione effettuata con soft-ware FlightLab e con modello ISO con parametri modificati. . 114
7.7 Confronto sulla potenza erogata all’interfaccia con il carico.Simulazione condotta con software FlighLab e con modelloISO con parametri modificati. . . . . . . . . . . . . . . . . . . 115

Elenco delle tabelle
3.1 Coefficienti dei polinomi per il calcolo di k e cp dei gas combustinel modello di Walsh [1]. . . . . . . . . . . . . . . . . . . . . . 31
3.2 Dati ricavati da test NASA su motore GE t700 (prima parte). 51
3.3 Dati ricavati da test NASA su motore GE t700 (seconda parte). 51
5.1 Errori percentuali dei due modelli rispetto al caso 2 di trimsperimentale. . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.2 Errori percentuali dei due modelli rispetto al caso 3 di trimsperimentale. . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.3 Errori percentuali dei due modelli rispetto al caso 4 di trimsperimentale. . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.4 Errori percentuali dei due modelli rispetto al caso 5 di trimsperimentale. . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.5 Errori percentuali dei due modelli rispetto al caso 6 di trimsperimentale. . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.6 Condizioni iniziali di temperatura nelle varie sezioni del mo-tore prima dell’ingresso a scalino di portata di combustibile. . 81
5.7 Condizioni iniziali delle portate prima dell’ingresso a scalinodi portata di combustibile. . . . . . . . . . . . . . . . . . . . . 82
5.8 Condizioni iniziali delle pressioni prima dell’ingresso a scalinodi portata di combustibile. . . . . . . . . . . . . . . . . . . . . 82
6.1 Taratura dei guadagni con il metodo di Ziegler e Nichols. . . . 89
6.2 Condizioni iniziali della simulazione 1 di motore controllato inanello chiuso da controllore proporzionale. . . . . . . . . . . . 95
7.1 Dati del motore P&W PT6C-67C. . . . . . . . . . . . . . . . . 108
9

10 ELENCO DELLE TABELLE

Sommario
In questo lavoro viene proposto un modello numerico di motore per elicotte-ro semplificato, flessibile e adattabile a piu applicazioni attraverso il minorenumero di parametri possibile. Tale modello e stato implementato in diverseversioni prima in linguaggio Matlab e poi in linguaggio C attraverso lo svi-luppo di una DLL, allo scopo di essere poi incluso in codici di simulazione edi meccanica del volo. La modellazione termodinamica e stata validata con-frontando i risultati ottenuti da alcune simulazioni con dei dati sperimentalidisponibili in letteratura. E stato poi affiancato al modello di motore ancheun controllore che ne regoli il funzionamento, seguendo una logica simile aquella di un FADEC. Infine si e validato il codice simulando una manovratipica e confrontando i risultati con quelli di riferimento.
The object of this thesis work is the development of a simplified, flexible,customizable helicopter engine numerical model, adaptable to several existingengines by tuning a small set of parameters. The model has been implemen-ted both in Matlab and C computing languages, resulting in a DLL that canbe easily linked with Flight Mechanics simulation codes. The thermodynamicmodel has been validated comparing the simulation results with available ex-perimental data. An automatic controller for the engine has been developedand integrated to reproduce typical FADEC logics. Finally, the model hasbeen tested using real inputs from a typical manoeuvre and comparing theresults with reference data.

12 ELENCO DELLE TABELLE
Capitolo 1
Inquadramento e finalita
1.1 Propulsione negli elicotteri
La propulsione tramite motori a turbina a gas e quella preponderante neglielicotteri di dimensioni medie e grandi. Il motore a turbina per elicotteri edi tipo turboalbero (turboshaft): tutta la potenza che si riesce a estrarre dalfluido di lavoro viene trasferita attraverso ad un’albero di trasmissione chemuovera i carichi ad esso connessi; i carichi sono costituiti principalmentedal rotore principale, dal rotore di coda e da alcune utenze secondarie degliimpianti del velivolo. I motori turboalbero sono simili ai propulsori turboe-lica utilizzati in velivoli ad ala fissa, ma a differenza di questi ultimi non enecessario progettare il motore in modo che il flusso di gas di scarico conserviall’uscita dal motore un’energia cinetica importante perche non se ne sfrut-ta il contributo di reazione nella spinta, bensı tutta la potenza che fornisceil propulsore viene trasferita tramite l’albero di potenza alla trasmissione equindi alle utenze.
1.1.1 Componenti tipici del motore per elicotteri
I componenti di un tipico motore a turbina per elicotteri sono riportati infigura 1.1, essi sono:
• la presa d’aria,
• il compressore,
• la camera di combustione,
• la turbina generatrice di gas,
• la turbina di potenza.
13

14 CAPITOLO 1. INQUADRAMENTO E FINALITA
Figura 1.1: Schema semplificato di motore turbo-albero connesso atrasmissione e rotore.
La presa d’aria e il componente che cattura l’aria esterna per convogliarlaall’interno del motore. Essa puo essere di due tipi:
• statica: se l’aria fluisce all’interno del motore solo per l’azione di aspi-razione effettuata dal propulsore.
• dinamica: se l’aria che fluisce nel propulsore lo fa anche sotto l’effettodella velocita dovuta al moto dell’elicottero.
Gli obiettivi di una buona presa d’aria dinamica sono di:
• aumentare la pressione, per evitare parte del lavoro di compressione alcompressore;
• realizzare un flusso uniforme a monte del compressore;
• ottenere minime perdite di pressione totale, e quindi minimizzare gliattriti;
• provocare la minima resistenza aerodinamica esterna;
• avere minimo peso e lunghezza.
Dalla presa d’aria, l’aria e convogliata verso il compressore, dove l’a-ria subisce una compressione che la porta ad una pressione e temperaturapiu elevate. Il compressore e una macchina operatrice pneumofora, ovve-ro una macchina che innalza la pressione di un gas mediante l’impiego dienergia meccanica. I compressori utilizzati nei motori per elicotteri sonoprincipalmente di due tipi:

1.1. PROPULSIONE NEGLI ELICOTTERI 15
• assiale, dove l’aria fluisce parallelamente rispetto all’asse longitudinaledel motore. I compressori assiali sono composti di piu stadi, ognunoformato da un elemento solidale al supporto del motore, lo statore, eda un elemento rotante, il rotore.
• centrifugo, in cui l’aria, dopo essere stata raccolta dalle palette di unagirante, e compressa per azione della forza centrifuga associata al motodi rotazione delle palette del compressore.
In molti motori elicotteristici si realizzano soluzioni ibride in cui alcuni sta-di del compressore sono realizzati tramite moduli assiali, mentre altri conmoduli centrifughi.
L’aria in uscita dal compressore viene poi diretta verso la camera di com-bustione attraverso un diffusore atto a rallentare il flusso e creare le condi-zioni migliori per l’accensione e la stabilizzazione della fiamma. In camera dicombustione l’aria e miscelata con il combustibile (generalmente kerosene),e la miscela risultante viene bruciata liberando l’energia necessaria all’ali-mentazione del propulsore. La conformazione delle camere di combustioneper elicotteri e generalmente di tipo anulare con flusso inverso, ovvero essacorre per tutta la circonferenza del propulsore e la direzione del flusso d’ariae ruotata di 180◦, consentendo un minore ingombro del propulsore. L’aria inarrivo dal diffusore del compressore viene divisa in due flussi:
• un flusso primario dove l’aria, miscelata con il combustibile all’internodel tubo di fiamma, raggiunge temperature dell’ordine dei 2500 ◦C;
• un flusso secondario, in cui l’aria e piu fredda e che consente di nondanneggiare i materiali con cui e realizzata la camera di combustione.
Il combustibile viene iniettato in camera di combustione attraverso de-gli iniettori che si dividono in primari, i quali consentono la combustionenelle normali situazioni operative, e secondari, che provvedono attraver-so degli igniter anche all’accensione del motore. La combustione avvienecon grande eccesso di aria, generalmente in un propulsore per elicotteri ilrapporto aria/combustibile e dell’ordine di 35:1. All’uscita dalla camera dicombustione i gas combusti prodotti hanno una temperatura dell’ordine di1500 K.
Successivamente, i gas combusti provenienti dalla camera di combustionevengono inviati nella prima turbina, la turbina di alta pressione (o turbi-na generatrice di gas [2]), che ha il compito di estrarre dal fluido l’energianecessaria ad alimentare il compressore. La turbina generatrice di gas e ilcompressore sono collegati rigidamente da un albero, che generalmente vieneindicato come albero della turbina generatrice di gas. La turbina e composta

16 CAPITOLO 1. INQUADRAMENTO E FINALITA
da piu stadi a loro volta formati da uno statore e un rotore. Lo statore hai compiti di deflettere il flusso cosı che l’aria investa ogni paletta del rotorecon l’incidenza adeguata, e di convertire parte dell’energia del flusso ad altapressione ed alta temperatura in energia cinetica. Ogni rotore e compostoda un albero e di alcune ruote sulle quali sono fissate le palette, le qualisfruttano l’energia cinetica del flusso per mantenere in rotazione l’albero.
A valle della turbina generatrice di gas si trova la turbina di potenza (oturbina libera), anch’essa a uno o piu stadi, che sfrutta l’energia residua deigas di scarico per fornire la potenza necessaria a mantenere in rotazione l’al-bero di potenza. Essendo la turbina di potenza collegata alla trasmissionee quindi al rotore, che opera in regimi di rotazione pressoche costanti, essadeve mantenere una velocita di rotazione assegnata, nonostante la potenzadel carico ad essa collegata sia variabile in funzione delle condizioni di voloe dei comandi. Il mantenimento della velocita di rotazione della turbina dipotenza e possibile grazie alla variazione del numero di giri della turbina ge-neratrice di gas. Il collegamento fra le due turbine e solo di tipo pneumatico,in quanto non vi e nessun organo meccanico che le colleghi. Le turbine la-vorano a regimi di rotazione compresi fra i 20000 e i 60000 giri/minuto. Lavelocita di rotazione della turbina generatrice di gas e indicata generalmentecon N1 (o Ng), mentre quella della turbina di potenza con N2 (o Nf o NPT ).A valle delle turbine i gas combusti sono scaricati esternamente tramite unugello.
Il propulsore aeronautico e l’unica fonte di potenza nella maggior parte deivelivoli, in special modo negli elicotteri, dove il requisito di leggerezza e moltostringente: per questo motivo oltre a sottrarre potenza all’albero tramite ge-neratori elettrici/alternatori che alimentino l’impianto elettrico, e necessarioanche spillare una quantita della portata d’aria elaborata dal compressore peralimentare l’impianto pneumatico e il sistema di controllo ambientale (ECS)per la pressurizzazione, se e prevista, e il condizionamento. Generalmentetale spillamento viene effettuato nei primi stadi del compressore, quelli a piubassa pressione.
La maggior parte dei motori per elicotteri e dotato di due alberi : il primo(albero della turbina generatrice di gas) collega il compressore alla turbina dialta pressione (HPT: High Pressure Turbine o turbina generatrice di gas), ilsecondo (albero della turbina di potenza) e quello di potenza che collega mec-canicamente la seconda turbina (PT: Power turbine o turbina di potenza oturbina libera) al carico tramite la trasmissione. Il collegamento fra la primae la seconda turbina, come gia detto, e solo di tipo pneumatico: cio comportala possibilita per il motore che i due alberi ruotino a velocita diverse. Il se-condo albero infatti, essendo collegato al rotore tramite la trasmissione, devegirare a una velocita pressoche costante (variabile al massimo di pochi punti
1.1. PROPULSIONE NEGLI ELICOTTERI 17
1
2
3
4Compressione
CombustioneEspansione
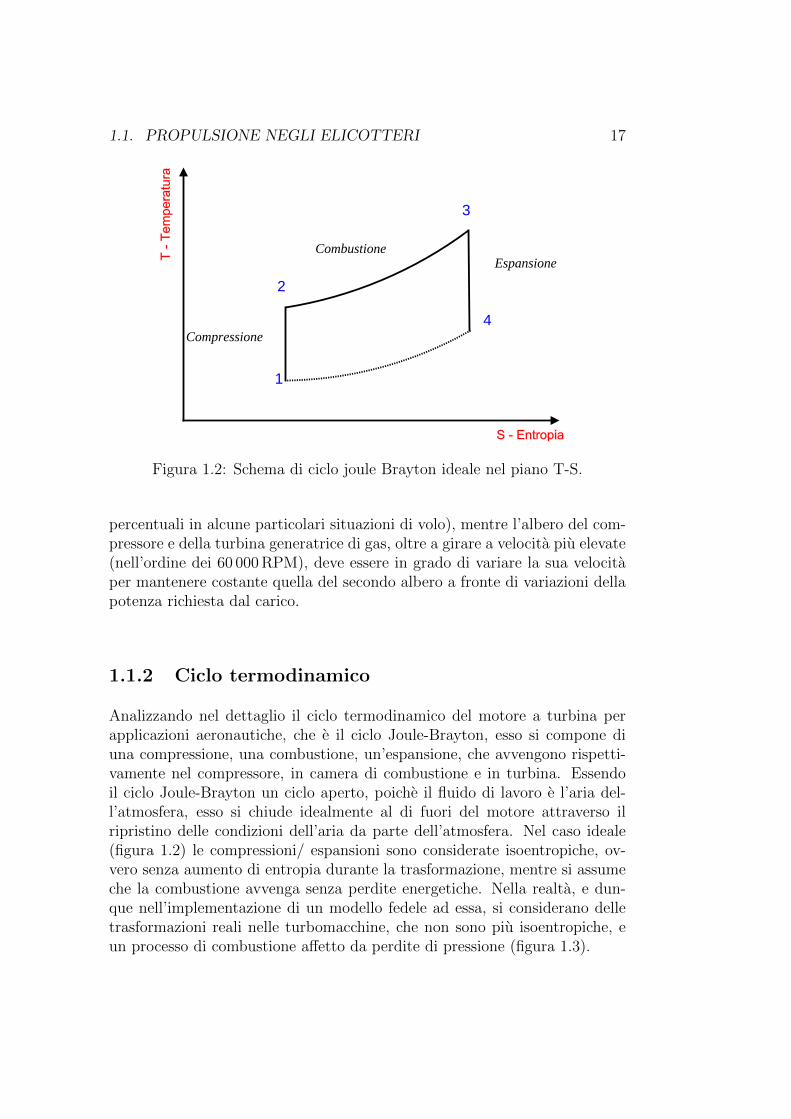
Figura 1.2: Schema di ciclo joule Brayton ideale nel piano T-S.
percentuali in alcune particolari situazioni di volo), mentre l’albero del com-pressore e della turbina generatrice di gas, oltre a girare a velocita piu elevate(nell’ordine dei 60 000 RPM), deve essere in grado di variare la sua velocitaper mantenere costante quella del secondo albero a fronte di variazioni dellapotenza richiesta dal carico.
1.1.2 Ciclo termodinamico
Analizzando nel dettaglio il ciclo termodinamico del motore a turbina perapplicazioni aeronautiche, che e il ciclo Joule-Brayton, esso si compone diuna compressione, una combustione, un’espansione, che avvengono rispetti-vamente nel compressore, in camera di combustione e in turbina. Essendoil ciclo Joule-Brayton un ciclo aperto, poiche il fluido di lavoro e l’aria del-l’atmosfera, esso si chiude idealmente al di fuori del motore attraverso ilripristino delle condizioni dell’aria da parte dell’atmosfera. Nel caso ideale(figura 1.2) le compressioni/ espansioni sono considerate isoentropiche, ov-vero senza aumento di entropia durante la trasformazione, mentre si assumeche la combustione avvenga senza perdite energetiche. Nella realta, e dun-que nell’implementazione di un modello fedele ad essa, si considerano delletrasformazioni reali nelle turbomacchine, che non sono piu isoentropiche, eun processo di combustione affetto da perdite di pressione (figura 1.3).

18 CAPITOLO 1. INQUADRAMENTO E FINALITA
22is
3
4
4is
1
Figura 1.3: Ciclo Joule-Brayton reale nel piano T-S.
1.1.3 Componenti connessi al propulsore
L’importanza di garantire la potenza necessaria al rotore e la necessita dimantenere la velocita del rotore costante in ogni situazione impone ai pro-pulsori per elicotteri l’utilizzo di un sistema di controllo che ne governi ilfunzionamento; tale sistema di controllo, dapprima realizzato con tecnolo-gie analogiche o miste analogico-digitali, oggi e costituito dal FADEC (FullAuthority Digital Engine Control), sistema di controllo digitale che governatutte le funzionalita del propulsore e che ha autorita assoluta sul suo fun-zionamento. L’implementazione di un FADEC reale e un’attivita complessae costosa che viene effettuata molto spesso dalle stesse ditte produttrici deipropulsori, che per ragioni di segreto industriale non divulgano le logiche chesono alla base dell’implementazione del controllore.
Nelle applicazioni elicotteristiche di elicotteri medio/grandi i motori in-stallati sono usualmente piu di uno, ed e quindi fondamentale l’accoppiamen-to fra piu propulsori e la loro gestione. Alcuni degli studi piu tipici di dina-mica del volo di elicotteri sono le condizioni OEI (One Engine Inoperative),o la cosiddetta Categoria A (si veda a riguardo il riferimento [3]).
Numerosi sono i sistemi e gli impianti che del motore regolano il funzio-namento (gestione delle temperature, afflusso del carburante, lubrificazione,anti-ghiaccio, sistemi di accensione), per un’analisi accurata di questi aspettisi e fatto riferimento all’ottimo [4], che tratta con rigore i sistemi connessi aimoderni motori turbofan commerciali, ma nell’implementazione del modellonon e stato ritenuto necessario entrare nel dettaglio di questi componenti.

1.2. FINALITA DEL LAVORO DI TESI 19
1.2 Finalita del lavoro di tesi
La simulazione della dinamica del volo di un aeromobile, specialmente se essoe ad ala rotante, e profondamente influenzata dal sistema propulsivo e dal suofunzionamento, in particolar modo durante i transitori e nel volo manovrato.La disponibilita di un modello di propulsore che sappia riprodurre fedelmentela risposta di un motore reale all’interno di un simulatore per lo studio dellameccanica del volo e un aspetto fondamentale.
Questa tesi si pone l’obiettivo di mettere a punto un modello di motoresemplificato, generale e adattabile con pochi aggiustamenti a vari propulsoriesistenti. Il codice che ne risulta sara impiegato in simulatori di meccani-ca del volo, sia all’interno del Dipartimento di Ingegneria Aerospaziale delPolitecnico di Milano che presso la divisione Flight Mechanics della dittaAgustaWestland. Dovra essere possibile adattare il codice al maggior nume-ro di propulsori a turbina per elicottero, cosı da rendere agevole il confrontotra l’istallazione di diversi motori su di una stessa macchina. Il codice dovraanche essere eseguito all’interno di simulatori di meccanica del volo e quindisara necessario che soddisfi un requisito real-time (non stretto) e sara neces-sario mettere a punto un’interfaccia grafica per rendere agevole la prova delcodice in modalita stand-alone.
Riassumendo gli obiettivi del codice saranno:
• adattabilita a molti motori tramite pochi parametri fondamentali, fa-cilmente reperibili;
• requisito real-time (non stretto);
• scrittura in linguaggio C per integrazione in sistemi piu estesi (Simula-tori di MdV (Meccanica del volo), ecc..);
• interfaccia grafica per prove di motore stand-alone.

20 CAPITOLO 1. INQUADRAMENTO E FINALITA

Capitolo 2
Stato dell’arte
2.1 Modellazione di motori a turbina
La disponibilita di grande potenza di calcolo ha reso possibile in tempi re-centi il proliferare di studi sulla simulazione del funzionamento di motorie generatori a turbina a gas, sia per il progetto del propulsore/generatore,sia per l’integrazione dello stesso all’interno di un sistema piu complesso. Idue bisogni, quello dello studio del propulsore in se e quello dell’integrazioneall’interno di un sistema piu vasto (ad esempio un velivolo o un impiantoindustriale), hanno per forza di cose una diversa esigenza di dettaglio nel-la simulazione: nel primo caso si deve essere in grado di riprodurre tuttii fenomeni inerenti il motore con grande precisione cosı da poter vagliarele differenti scelte progettuali, nel secondo invece la richiesta e quella di ri-produrre il funzionamento del componente propulsore/generatore agli effettiesterni, ovvero nell’interazione che esso ha con il sistema principale, sia essoaeroplano, elicottero o impianto industriale.
Il nostro lavoro si riconduce alla seconda tipologia di simulazione, in par-ticolare la modellazione del motore a turbina che abbiamo messo a punto halo scopo di fornire ad un qualunque programma di simulazione di meccanicadel volo i parametri del motore di interesse per la simulazione della dinamicadel velivolo.
La grande maggioranza dei lavori riguardanti simulazioni di motori a tur-bina per elicotteri, citando il lavoro di Ballin [5] e quello di Duyar e Gu [6], ba-sano i loro modelli sulle prove effettuate dai laboratori NASA Lewis negli anni’80 sul motore General Electric t700 (figura 2.1), largamente diffuso e uti-lizzato, tra gli altri sull’elicottero Sikorsky UH-60 (due unita per elicottero),sull’AgustaWestland AW149 (due unita per elicottero) e sull’AgustaWestlandAW101 (tre unita per elicottero).
21

22 CAPITOLO 2. STATO DELL’ARTE
Figura 2.1: Il motore General Electric t700.
Un lavoro di riferimento per ogni simulazione di motore per elicotteri e ilmemorandum tecnico [5], dove sulla base di esperimenti compiuti dalla NASAsu un motore General Electric t700, si mette a punto un modello semplificatoreal-time e lo si confronta con i dati sperimentali rilevati al banco. Il modellomesso a punto e di tipo non lineare: tramite la conoscenza dei valori deglistati termodinamici del motore per vari casi di trim sperimentali, vengonodapprima calcolati off-line dei punti di funzionamento che poi il modelloutilizzera durante la simulazione attraverso una logica di adattamento nonlineare. A questo memorandum si fara riferimento in fase di validazioneperche esso contiene la gran parte dei dati sperimentali a cui si riferisce lamaggioranza dei lavori successivi: tali dati sperimentali saranno quelli concui ci si confrontera nelle simulazioni di validazione statica e dinamica dellaparte termodinamica del modello. In [5] e anche presente un implementazionedel controllore del motore, cosı da poterne simulare il comportamento anchein anello chiuso insieme ad un modello dinamico semplificato dell’elicotteroUH-60.
Prosecuzione del lavoro di Ballin ([5]) e il report [6], dove, a partire dal mo-dello di Ballin, viene messo a punto un simulatore semplificato, linearizzato ein anello aperto del solito motore GE t700. Collegando in una formulazioneagli stati diversi punti di funzionamento del modello trattato in [5], vienequindi generato un sistema lineare che rende piu agevole l’implementazionee la sua risoluzione in real-time.
Nell’articolo di Camporeale e Fortunato [7] si trova un approccio piu re-

2.2. SOFTWARE ESISTENTI 23
cente al problema: il lavoro si pone lo scopo di mettere a punto in ambienteSimulink R©un codice modulare che consenta la simulazione di impianti in-dustriali di turbine a gas. Il modello che viene messo a punto dagli autorie del tipo “aerotermico”, similmente a quanto fatto successivamente anchenella tesi di Kocer [8] e nel recente articolo di Kocer [9], con una rappresen-tazione concentrata delle turbomacchine. La modellazione del componentecombustore da noi implementata e concorde con quella utilizzata in tale lavo-ro, ovvero quella di un puro accumulatore di energia, delegando il bilancio dimassa ad un componente “plenum” che non trova riscontro in un componentefisico.
In [9] e nella tesi [8] si ritrova un approccio moderno molto simile a quellodi Camporeale e al.
2.2 Software esistenti
I software disponibili per la simulazione di motori a turbina a gas si possonoraggruppare in due tipologie:
• software di simulazione del motore real-time;
• banchi prova virtuali non real-time (engine deck);
I software non real-time consentono una maggiore accuratezza dellamodellazione e nella discretizzazione degli stati termodinamici del motore.Questi software vengono spesso realizzati dal produttore del propulsore sullabase di prove sperimentali ottenute al banco, e la loro utilita e quella di averea disposizione un modello molto accurato che puo sostituire il vero motorein molte applicazioni dove l’utilizzo del propulsore reale sarebbe impossibileper questioni di sicurezza o di costo:
• prove con propulsore “in the loop”;
• prove pericolose che potrebbero danneggiare il propulsore;
• verifica dei sistemi di controllo e di diagnostica;
Fra i software esistenti in questo campo, uno dei piu conosciuti e GSP:Gas turbine Simulation Program ([10]), messo a punto dall’NLR (NationaalLucht- en Ruimtevaartlaboratorium: centro di ricerca aeronautico olandese)e scaricabile liberamente nella sua versione dimostrativa. Esso consente lasimulazione di una vasta gamma di motori/generatori a turbina a gas, es-sendo un codice modulare con un’interfaccia grafica abbastanza intuitiva. Ilcodice sorgente e scritto in Delphi, linguaggio orientato agli oggetti, e non

24 CAPITOLO 2. STATO DELL’ARTE
e reso disponibile nella versione liberamente scaricabile. GSP e un codicecompleto che consente di simulare anche l’usura dei componenti e le perditedi installazione del motore. Durante l’uso di questo programma abbiamoregistrato una difficolta a convergere in situazioni lontane dal funzionamen-to nominale, ed e quindi stato impossibile utilizzare tale programma comeconfronto nelle simulazioni eseguite, se non in quelle in condizioni nominali,dove erano disponibili anche dei dati sperimentali, che sono stati preferiti aquelli generati da GSP. Va riconosciuto a questo programma una intuitivainterfaccia grafica e una buona documentazione disponibile on line. Esso estato infatti impiegato in numerosi progetti europei di ricerca.
I software real-time sono utili invece per un numero di situazioni dovee richiesto che il funzionamento avvenga nei tempi caratteristici del fenome-no reale, rinunciando magari a parte dell’accuratezza garantita dagli enginedeck:
• osservatore del propulsore per i sistemi di bordo del velivolo;
• simulatore di motore da inserire in simulatori di volo;
Un software di questa tipologia e TERTS: Turbine Engine Real-TimeSimulator ([11]), messo a punto dallo stesso team dell’NLR di Amsterdamche ha ideato anche GSP. TERTS e in effetti un software derivato da GSP,che rispetta pero un requisito real-time. Esso e implementato in ambienteMatlab-Simulink.
Gran parte dei software real-time per la simulazione di motori implemen-tano un modello lineare ottenuto dall’identificazione di un sistema. Moltospesso vengono implementati modelli ”lineari a tratti” dove una serie di re-lazioni lineari viene utilizzata per coprire lo spazio di stati altamente nonlineare [6]. Modelli lineari separati vengono determinati per differenti con-dizioni operative (per esempio diverse velocita di rotazione). Questo tipo diapproccio e largamente diffuso per l’utilizzo in simulatori di volo o per il pro-getto di sistemi di controllo. Per analisi piu accurate di ogni nuovo effetto,e comunque preferibile un approccio termodinamico che si attenga maggior-mente alla fisica del problema, cosı da avere un modello di base che possaessere impiegato in una maggiore varieta di prove. Il set di equazioni nonlineari che traduce generalmente i principi fisici di conservazione della massa,bilancio di energia e conservazione del momento angolare, viene poi risolto indiversi modi, fra i metodi di soluzione piu utilizzati in letteratura ricordiamo:il metodo di Newton-Raphson, la generazione di Jacobiani in prossimita dialcuni punti di funzionamento noti, e il metodo di Broyden per l’aggiorna-mento dello Jacobiano. Il calcolo dello Jacobiano, se da una parte consenteuna rapida convergenza e un’efficace implementazione del codice real-time, in

2.2. SOFTWARE ESISTENTI 25
quanto puo essere effettuato off-line prima della simulazione, dall’altra partepuo portare a un insieme di problemi quali dei punti di stazionarieta, malcondizionamento numerico della matrice Jacobiana o problemi di oscillazio-ne intorno a un punto di equilibrio. Il requisito real-time di avere un tempomassimo di esecuzione del codice porta nella maggior parte di questi softwarea un numero massimo di iterazioni concesse (troncamento delle iterazioni):dopo un limitato numero di passi temporali (massimo tempo di esecuzioneall’interno di un passo temporale), l’iterazione viene fermata e l’accuratez-za del calcolo viene accettata per quella che e. All’iterazione successiva siassume che il modello sia giunto a convergenza Questa assunzione e ragio-nevole se la simulazione del motore coinvolge transitori con grandi gradientiche durano brevi periodi. Negli intervalli fra uno di questi transitori velocie l’altro si assume che il propulsore lavori quasi stazionariamente, cosiccheogni errore residuo nelle equazioni venga eliminato.

26 CAPITOLO 2. STATO DELL’ARTE

Capitolo 3
Fisica del problema emodellazione
La modellazione del problema e avvenuta tenendo sempre presente l’obiet-tivo di un modello semplice, che riproduca i fenomeni fisici di interesse inmodo completo, senza pero entrare troppo nel dettaglio del comportamentodinamico sia dal punto di vista della gasdinamica che della chimica, cosa cheavrebbe richiesto un impegno eccessivo nella modellazione e nell’esecuzionedel codice, che nelle intenzioni del lavoro deve poter avvenire in real-time.
La determinazione del modello e stata pensata considerando come base dipartenza il motore General Electric t700 al quale si riferisce gran parte dellaletteratura in materia (es. [5, 6]), cosı da potersi confrontare su casi test ilpiu possibile vicini a quelli disponibili. Si e posta attenzione all’estendibilitadel modello a propulsori diversi enfatizzando il requisito di portabilita delmodello, rendendolo dipendente da alcuni parametri fisici caratterizzanti ilmotore possibilmente reperibili in letteratura per nuovi e differenti motori.
3.1 Modellazione delle turbomacchine
In accordo con la letteratura piu recente [7, 8, 9], si e scelto di modellarele turbomacchine (compressore e turbine) come dei componenti istantanei,considerando la loro dinamica interna talmente veloce da non influire sulledinamiche piu lente del sistema complessivo. Le trasformazioni che avven-gono all’interno delle turbomacchine sono state modellate considerando lacorrispettiva espansione o compressione isoentropica e correggendola poi conun rendimento per determinare il punto finale della trasformazione reale. Ladeterminazione del rapporto di compressione o di espansione per ogni tur-bomacchina e stato valutato a partire da mappe che parametrizzano queste
27

28 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
grandezze in funzione di un parametro caratteristico che identifica il regimedi funzionamento del motore nella condizione considerata. Tale parametro,per quanto riguarda il compressore e la turbina generatrice di gas, e statoidentificato nel regime di rotazione dell’albero della turbina generatrice digas (n1), e invece nella temperatura di uscita dalla turbina generatrice di gas(T4) per la turbina di potenza.
La determinazione delle portata richiamata ed elaborata dal compressoreviene fatta in modo analogo al calcolo del rapporto di compressione, para-metrizzando la portata in funzione del regime di rotazione dell’albero dellaturbina generatrice di gas (n1).
Le scelte delle grandezze sulle quali parametrizzare le mappe sono statedettate dal ragionamento sulla fisica del problema: la scelta del parametron1 per la determinazione dei rapporti di compressione e della portata ela-borata dalle turbomacchine calettate sull’albero della turbina generatrice digas (compressore e turbina di alta pressione) sono in accordo con il fattoche una rotazione a maggiore velocita del compressore comporta un richiamomaggiore di aria, e quindi una maggiore portata, e che la stessa rotazionea maggiore velocita comporta un maggiore lavoro di compressione e quindiun salto maggiore della pressione fra l’imbocco e l’uscita del componente.Lo stesso ragionamento si puo trasferire alla turbina. Si pensi ad esempioa un compressore che lavori al doppio della velocita di un componente ana-logo in due identici propulsori: il componente alla velocita doppia, a menodi regolazioni dell’ingresso dell’aria de parte dell’IGV (Inlet Guide Vane) edi limiti dovuti al regime di moto del fluido nella turbomacchine, elaborerauna portata maggiore del suo omologo che gira a piu bassa velocita e faraeseguire al fluido una maggiore variazione di pressione fra l’ingresso e l’uscitadel componente.
Per quanto riguarda la scelta del parametro su cui valutare il regime difunzionamento della turbina di potenza, la scelta e caduta sulla temperaturadi uscita dalla prima turbina, in quanto questo e uno dei parametri variabilicon i vari regimi del motore ed era disponibile un confronto con dati speri-mentali in letteratura ([5]). Sarebbe stato possibile parametrizzare le mappesu altre grandezze (ad esempio la pressione p4 a valle della turbina HPT), manon si avrebbe avuto modo di confrontarsi con quello che e il funzionamen-to di un motore vero al banco. Infatti in letteratura non e disponibile unacampagna di prove che fornisca maggiori variabili di interesse per un motoreelicotteristico in prove al banco.

3.2. PROPRIETA DEI FLUIDI 29
3.2 Proprieta dei fluidi
Determinazione delle proprieta dell’aria. A causa delle grandi varia-zioni di temperatura e per mantenere un’elevata accuratezza della simula-zione, le proprieta dei fluidi di lavoro, aria e gas combusti, devono esserecalcolate per ogni condizione in ogni stadio del propulsore. L’aria e consi-derata una miscela di gas semi-ideali, similmente a quanto fatto in [7], e leproprieta termodinamiche della miscela (calori specifici cp, cv e loro rapportok ) vengono determinate in base alla sola temperatura tramite una tabella.La pressione della miscela aria e la somma delle pressioni parziali dei gas chela compongono. Sotto queste ipotesi le proprieta termodinamiche del fluidosono funzioni della temperatura e della composizione della miscela. Il fluidoaria e quello elaborato all’interno dei componenti presa d’aria, compressoree plenum.
Determinazione delle proprieta dei gas combusti. Sotto l’ipotesi, ge-neralmente verificata nei moderni motori, che la combustione avvenga congrande eccesso d’aria e che il processo di combustione possa essere consi-derato completo all’uscita della camera di combustione, il fluido di lavoroconsiderato durante tutte le trasformazioni all’interno delle turbine e dellacamera di combustione e una miscela di gas combusti, con uno specifico rap-porto aria/combustibile (FAR: Fuel to Air Ratio), noto dall’apporto di com-bustibile e di aria nel motore all’istante considerato. Per la definizione delleproprieta termodinamiche dei fluidi di lavoro si e fatto riferimento al capitolo3 del testo [1]. La costante dei gas R (dimensionalmente [J/KgK]) per la mi-scela di gas combusti e calcolata in funzione del rapporto aria/combustibile(FAR) come:
Rkerosene = 287.05− (0.00990) (FAR) + (10−7) (FAR)2
dove FAR e definito come:
FAR =mfuel
mair
=mfuel
mair
Si noti ( figura 3.1) che per i gas ottenuti dalla combustione di kerosenecon aria, la costante dei gas R non cambia in modo considerevole per valoridi FAR quali quelli utilizzati nei motori aeronautici (0.01:0.05).
Il calore specifico cp dei gas combusti provenienti dalla combustione delkerosene e funzione della temperatura e della composizione della miscelaaria/combustibile. Il kerosene impiegato nella propulsione aeronautica hauna composizione chimica abbastanza omogenea, e il suo calore specifico per

30 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
0 0.01 0.02 0.03 0.04 0.05285
286
287
288
289
290
291
292
293
294
295
FAR − Fuel to Air Ratio
R −
Gas
con
stan
t [J/
KgK
]
KEROSENE COMBUSTION PRODUCTS GAS CONSTANT
Figura 3.1: Variazione della costante dei gas R in funzione della temperaturaper i gas combusti di kerosene.
temperature comprese fra 200 K e 2000 K e ben approssimatao dalla equa-zione 3.1, formula empirica che tiene conto della temperatura e del rapportoaria/combustibile:
cp = A0 + A1TZ + A2T2Z + A3T
3Z + A4T
4Z + A5T
5Z + A6T
6Z+
A7T7Z + A8T
8Z +
FAR
1 + FAR(B0 +B1TZ +B2T
2Z +B3T
3Z+
B4T4Z +B5T
5Z +B6T
6Z +B7T
7Z)
(3.1)
dove TZ = T1000
[K] e A0 . . . A8 e B0 . . . B7 sono i coefficienti del polinomioriportati in tabella 3.2.
Per l’andamento del calore specifico dei gas combusti del kerosene si facciariferimento alla figura 3.2
Per il calcolo del rapporto fra calori specifici dei gas combusti del kerosene,denominato con k si e fatto riferimento alla relazione:
k =cpcv
=cp
cp −R
L’andamento del rapporto dei calori specifici e riportato nella figura 3.3.

3.2. PROPRIETA DEI FLUIDI 31
A0 0.992313 B0 -0.718874A1 0.236688 B1 8.74781A2 -1.852148 B2 -15.863157A3 6.083152 B3 17254096A4 -8.893933 B4 -10.233795A5 7.097112 B5 3.081778A6 -3.234725 B6 -0.361112A7 0.794571 B7 -0.003919A8 -0.081873 B8 0.0555930
Tabella 3.1: Coefficienti dei polinomi per il calcolo di k e cp dei gas combustinel modello di Walsh [1].
200 400 600 800 1000 1200 1400 1600 1800 20001
1.05
1.1
1.15
1.2
1.25
1.3
1.35
1.4
Temperature [K]
CP
− S
peci
fic H
eat [
kJ/k
gK]
KEROSENE COMBUSTION PRODUCTS SPECIFIC HEAT − Cp
FAR=0FAR=0.01FAR=0.02FAR=0.03FAR=0.04FAR=0.05
Figura 3.2: Calore specifico dei gas ottenuti dalla combustione di kerosenein funzione della temperatura per diversi rapporti aria/combustibile.

32 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
200 400 600 800 1000 1200 1400 1600 1800 20001.26
1.28
1.3
1.32
1.34
1.36
1.38
1.4
1.42
Temperature [K]
k −
Spe
cific
Hea
t Rat
io
KEROSENE COMBUSTION PRODUCTS SPECIFIC HEAT RATIO − k
FAR=0FAR=0.01FAR=0.02FAR=0.03FAR=0.04FAR=0.05
Figura 3.3: Rapporto fra calori specifici del kerosene in funzione ditemperatura e rapporto aria/combustibile.
Le relazioni presentate sono valide per temperature comprese fra 200 e2000 K, ma dal momento che in camera di combustione si possono raggiun-gere per brevi momenti anche temperature dell’ordine dei 2500 K, si rendenecessario un modello piu complesso, quale quello messo a punto in [12]: inesso vengono implementate le seguenti relazioni, valide fra 300 e 3500 K eanche oltre con errori modesti:
cpcombustibilecparia
=1 + FAR(I0 + I1 T + I2
T 2 )
1 + FAR
dove i coefficienti I0, I1 e I2 si determinano come:
I0 =18.0566 nC + 8.3485 nH + 15.1616 nO
Mcombustibile
(3.2)
I1 =0.00223 nHMcombustibile
(3.3)
I2 =1077768.4 nCMcombustibile
(3.4)
in cui Mcombustibile e la massa molecolare di una molecola di combustibile(nel nostro caso kerosene, Mkerosene = 170), mentre nC , nO, nH sono il numero

3.3. COMPONENTI DEL MODELLO 33
di moli di carbonio, ossigeno e idrogeno necessarie alla generica reazione dicombustione:
CnCHnH
OnO+ (nC +
nH4− nO
2)O2 = ncCO2 + (
nH2
)H2O
Nel caso di combustione di kerosene in aria secca in rapporto stechiometricoavremo:
C12 H26 +37
2O2 = 12 CO2 + 13 H2O
e quindi i numeri di moli assumono i valori:
nC = 12 (3.5)
nH = 26 (3.6)
nO = 0 (3.7)
L’utilizzo di questo schema di soluzione permette un’ottima rappresen-tazione delle proprieta dei gas combusti di kerosene in un intervallo di tem-perature molto vasto (200-5000 K), con errori quantificati da [12] in qualchedecimo di punto percentuale.
Nelle figure 3.5 e 3.4 si e confrontato il comportamento dei gas di scaricodel modello di Guha e quello dell’aria per temperature fino ai 3000 K. Ilmodello polinomiale di [1], invece, per temperature superiori ai 2200 K none piu utilizzabile perche fornisce valori di cp e k palesemente impossibili: siveda a riguardo la figura 3.6.
3.3 Componenti del modello
In figura 3.7 sono visibili tutti i componenti del modello di motore. Si noticome non ci sia un’effettiva corrispondenza fra i componenti fisici e quelli delmodello numerico.
Il modello numerico e composto dei seguenti componenti:
• presa d’aria;
• compressore;
• plenum;
• combustore;
• turbina di alta pressione;
• turbina di potenza;

34 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
0 500 1000 1500 2000 2500 3000
1.25
1.3
1.35
1.4
1.45
1.5
1.55
Temp [K]
k =
cp/
cv
RAPPORTO FRA CALORI SPECIFICI k − FAR = 1/35
k
ARIA
kGAScombusti
Figura 3.4: Rapporto fra calori specifici k dell’aria e dei gas combusti dikerosene con rapporto aria/combustibile di 1
35ottenuto con il modello di
Guha.
0 500 1000 1500 2000 2500 3000900
1000
1100
1200
1300
1400
1500
1600
1700
Temp [K]
cp [J
/kgK
]
CALORE SPECIFICO A PRESSIONE COSTANTE cp − FAR = 1/35
cpARIA
cpGAScombusti
Figura 3.5: Calore specifico cp dell’aria e dei gas combusti con rappor-to aria/combustibile di 1
35, ottenuto con il modello di Guha per un ampio
intervallo di temperature.

3.3. COMPONENTI DEL MODELLO 35
0 500 1000 1500 2000 2500 3000−5000
−4000
−3000
−2000
−1000
0
1000
2000
Temp [K]
cp [J
/kgK
]CONFRONTO cp ARIA E GAS COMBUSTI CON MODELLO DI WALSH
cpKEROSENE
cpARIA
Figura 3.6: Calore specifico di aria e gas combusti ottenuto con modello diWalsh, con FAR=1/35.
• carico.
Si noti come i componenti del modello non corrispondano esattamente aquelli di un motore fisico. E’ evidente che il plenum non e presente in unmotore fisico; questo componente, come verra spiegato piu estesamente nelseguito, serve a implementare un principio di conservazione della massa nonstazionario all’interno di un volume. Allo stesso modo nel modello sono pre-senti un generico compressore e due generiche turbine non suddivise in stadi,e non e specificato se questi componenti siano di tipo assiale o centrifugo.Questa generalita dei componenti del modello e tesa a riprodurre il mag-gior numero di motori possibile, senza entrare nel dettaglio della specificaconfigurazione. Nell’implementazione del modello si e scelto di riprodurre icomponenti agli effetti esterni e non entrare nel dettaglio delle loro peculia-rita proprio per mantenere maggiore generalita e portabilita rispetto a diversisistemi.
3.3.1 Presa d’aria
La presa d’aria e del tipo dinamico, ideale perche si ipotizza che non visiano perdite per attrito. In presenza di una componente di velocita v nonnulla in direzione perpendicolare al piano dell’ingresso dell’aria nel motore, la

36 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
Plenum
Burner
Air Intake
Com
pressorP
ower turbine
High P
ressure
Turbine
SP
OO
L 1S
PO
OL 2
p-EX
T, T
-EX
T
p1, T1
p21,T21
n1
p2, T2
p3, T3
T_kerosene
p4, T4
p5, T5
g_CO
OL
g2
n2
g1
g21g3
g4
g_b
Figura 3.7: Schema del motore e flusso di informazioni fra i vari componenti.

3.3. COMPONENTI DEL MODELLO 37
pressione totale e la temperatura totale all’ingresso del compressore vengonoincrementate di una quantita fornita dalle relazioni:
∆p =1
2ρ v2 (3.8)
∆T =v2
2cp(3.9)
La 3.8 traduce il teorema di Bernoulli per flussi incomprimibili, la 3.9 derivadal primo principio della termodinamica. in questo modo la pressione totalesi aggiorna come:
ptot = ps + ∆p (3.10)
e la temperatura totale:
Ttot = Ts + ∆T (3.11)
dove ps e Ts sono la pressione statica e la temperatura statica, assunteomogenee su tutta la sezione all’imbocco della presa d’aria.
3.3.2 Compressore
Il compressore e un componente adiabatico, istantaneo e privo di dimensione(0-D). Durante i transitori, in accordo con [7], la risposta del compressoree assunta essere quella di un componente quasi stazionario, ovvero la suadinamica e considerata molto piu veloce di quella dei componenti piu lenti,e sono quindi utilizzate mappe ricavate dal funzionamento del componentea regime. Le mappe forniscono la portata elaborata dal compressore g21 eil rapporto di compressione βC in funzione della velocita di rotazione n1,passando attraverso una normalizzazione e una successiva scalatura comeverra illustrato in dettaglio nel paragrafo relativo alle mappe.
βc = f(n1) (3.12)
g21 = f(n1) (3.13)
La temperatura al termine della compressione viene calcolata attraverso unatrasformazione isoentropica corretta con un rendimento. Chiamando T1 e p1la pressione e la temperatura all’imbocco del compressore e quindi all’uscitadella presa d’aria avremo:
T21is = T1(p21p1
)k−1k (3.14)

38 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
La 3.14 e la trasformazione che l’aria subirebbe passando dalla pressione P1
alla pressione P21 idealmente senza perdite e senza aumento di entropia (tra-sformazione isoentropica). Naturalmente, noto il rapporto di compressioneβc definito come
βc =p21p1
(3.15)
e possibile riscrivere la 3.14 come:
T21is = T1(βc)k−1k (3.16)
Nota la T21is, che e la temperatura di uscita dalla compressione isoentropica,e possibile calcolare il lavoro compiuto dal compressore correggendo il lavoroisoentropico con un rendimento:
Lcompressore = cp(T1 − T21is)ηc (3.17)
Il rendimento ηc, definito rendimento isoentropico del compressore, e assuntoessere costante in tutto il campo di funzionamento della turbomacchina, mapotrebbe in futuro essere parametrizzato in funzione di una grandezza qualeil regime di rotazione dell’albero. E’ infine possibile calcolare la temperaturareale al termine della compressione attraverso la 3.18:
T21 = T1 −Lcompressore
cp(3.18)
La temperatura T21 all’uscita dal compressore e quindi dipendente dalle con-dizioni ambientali di temperatura e pressione esterne, dalla velocita di volodel velivolo e dal rapporto di compressione che il compressore esprime almomento.
3.3.3 Plenum
Come accennato in precedenza, utilizzando un plenum si riesce a riprodurreun effetto di comprimibilita dei gas al passaggio nella camera di combustio-ne e quindi anche un ritardo nell’adattamento della pressione. L’utilizzo delplenum, comune a molta letteratura [7, 9], permette di attribuire alla cameradi combustione o combustore la sola funzione di accumulatore di energia. Ilplenum si rende necessario per tenere conto del volume dei vari componentiche nell’implementazione del modello sono trattati come elementi 0-D ovve-ro privi di volume. Nella nostra implementazione l’unico plenum impiegatoe posto fra l’uscita del compressore e l’imbocco del combustore, e serve aconsiderare il bilancio di massa dovuto all’aria proveniente dal compressore,

3.3. COMPONENTI DEL MODELLO 39
l’aria spillata per le varie utenze, l’aria diretta al raffreddamento della tur-bina, l’aria elaborata dal combustore. Il bilancio di massa non stazionario edato dall’equazione:
Vplenumm R Tout
dpoutdt
= gin − gout (3.19)
dove Vplenum e il volume attribuito al componente plenum, Tout e pout latemperatura e la pressione all’uscita dal plenum, gin e gout le portate massichein ingresso e in uscita dal componente plenum. La portata d’aria in ingressoal plenum e quella elaborata dal compressore:
gin = gcompressore = g21
La portata gout che abbandona il plenum e divisa in due parti:
gout = g2 = gcool + g3
• gcool: portata d’aria spillata e inviata alle utenze e al raffreddamentodella turbina HPT.
• g3: portata d’aria che viene inviata nel combustore per partecipare allacombustione.
Possiamo quindi determinare la portata massica in uscita dal plenum g2in funzione della variazione della pressione in uscita dal plenum ∂p2
∂te delle
portate massiche di aria del compressore e spillate:
g2 = g21 − gcool −Vplenumk2RT2
τplenumdp2dt
dove la costante di tempo τplenum e definita come:
τplenum =Mplenum
k2g2
Poiche la pressione p2 e, per l’ipotesi di nessuna perdita nel plenum, lastessa pressione all’uscita dal compressore, determinata tramite una mappain funzione della velocita di rotazione n1 e della temperatura p1, ovvero:
p2 = p21 = βC(n1)p1 = f(n1, p1)
Allora e possibile esprimere la derivata ∂p2∂t
in funzione dell’accelerazione rota-tiva del primo albero n1, che e uno dei residui del sistema, secondo il seguenteragionamento:

40 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
∂p2∂t
= βCp1 + βC p1
Poiche si puo assumere che p1 vari molto lentamente rispetto a βC , ovvero:
p1 ≈ 0
allora possiamo scrivere:∂p2∂t
= βCp1
Dove la derivata temporale βC e in realta funzione dell’accelerazione dirotazione, e si puo cosı esplicitare:
βC =∂βC∂t
=∂βC∂n1
∂n1
∂t=∂βC∂n1
n1
Per valutare la derivata del rapporto di compressione rispetto alla velocitadi rotazione, ∂βC
∂n1si puo alternativamente:
• valutare la derivata del polinomio con cui si e costituita la mappa diβC .
• approssimare tale derivata nel campo di funzionamento.
Nel caso ∂βC∂n1
si possa valutare dal polinomio che esprime la mappa di βC
βC = a0 + a1n1 + a2n21 + a3n
31 + · · ·+ ann
n1
allora∂βC∂n1
= a1 + a2n1 + a3n21 + · · ·+ ann
n−11
Nel caso invece si voglia approssimare la derivata, si puo ad esempioipotizzare un andamento lineare del rapporto di compressione con la velocitadi rotazione dell’albero e quindi:
βC = βC(n1 = 0) +βCnom(n1 = n1nom)− βC(n1 = 0)
n1nom
n1
Poiche in condizioni di compressore fermo si puo assumere che la pressione avalle del componente sia la stessa a valle dello stesso (nessuna compressione):
βc(n1 = 0) = 1
allora la derivata parziale assume il valore costante:
∂βC∂n1
=βCnom − 1
n1nom

3.3. COMPONENTI DEL MODELLO 41
Otteniamo quindi la portata in uscita dal plenum ad ogni istante come:
g2 = mout = g21 − gcool −p2Vplenumk2RT2
∂βC∂n1
n1 (3.20)
3.3.4 Combustore
La camera di combustione e, nel nostro modello, un puro accumulatore dienergia. Essa viene implementata con il nome di combustore (burner), perrisaltare la funzione di generazione di energia attraverso la reazione di com-bustione. Alla camera di combustione e associata la sola dinamica termicadel sistema: quella della temperatura in camera di combustione T3. Essendola camera di combustione l’elemento subito a valle del plenum, si assumeche in essa le condizioni all’imbocco e allo sbocco siano omogenee sulla se-zione ed eguali a quelle in uscita dal plenum, che sono le stesse in uscita dalcompressore:
pincombustore = p2 = p21
Tincombustore = T2 = T21
All’interno del componente combustore avviene la miscelazione dell’ariacon il combustibile. La portata di combustibile gb e l’ingresso principale delsistema, mentre la portata d’aria in ingresso e quella proveniente dal plenum,come gia visto nel paragrafo relativo:
g3 = g2 − gcool
Il componente combustore non e privo di perdite come il plenum, ma fral’imbocco e l’uscita e prevista una perdita di carico per il fluido quantificabilecon un rendimento yCC :
p3 = poutcombustore = p2 yCC
Il rendimento yCC e assunto essere costante.L’equazione che descrive la dinamica del combustore e ottenuta dal bi-
lancio di energia instazionario:
d(MCCuCC)
dt=ginhin + gb(hb + ηbLHV )− gouthout
goutcpout(3.21)
dove MCC e uCC sono rispettivamente la massa di gas presenti all’internodel componente combustore e l’energia interna specifica dei gas; LHV e ilpotere calorifico inferiore del combustibile (Lower Heating Value).

42 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
Trascurando le variazioni della massa e del calore specifico l’equazione3.21 puo essere riscritta come
Tout =ginhin + gb(hb + ηbLHV )− gouthout
goutcpoutτCC(3.22)
La costante di tempo τCC puo essere valutata come:
τCC =MCC
k gout
Usando la nomenclatura del modello e della figura 3.7, la dinamica ter-mica, relativa alla temperatura in camera di combustione puo essere espressadalla:
T3 =g2 h2 + gb(hb + ηb LHV )− g3 h3
g3 cp3 τcc(3.23)
dove le entalpie specifiche h3, h2, hb sono calcolate come:
h2 = cp2 T2
h3 = cp3 T3
hb = cvkerosene Tkerosene
Per le proprieta del combustibile si e fatto riferimento a [13].Riscriviamo l’equazione 3.23 puo essere riscritta esplicitando le relazioni
delle entalpie specifiche:
T3 =R T3 k3
p2 yCC VCC cp3[g2 cp2 T2+gb(cvb hb+ηb LHV )−(g2+gb)cp3 T3] (3.24)
Nell’equazione 3.24, le grandezze dipendenti da T3, e quindi dalla stessaderivata T3 sono:
k3, cp3, T3
e quindi l’equazione risulta implicita.I calori specifici e i loro rapporti sono calcolati attraverso il modello di
Guha ([12]) per i gas combusti di kerosene, come spiegato nella sezione rela-tiva ai fluidi e alle loro proprieta. I metodi di integrazione adottati dovrannotenere in conto l’implicitezza del sistema per la risoluzione delle equazionidifferenziali.

3.3. COMPONENTI DEL MODELLO 43
3.3.5 Turbina generatrice di gas
La turbina generatrice di gas (HPT: High Pressure Turbine) e modellatacome un componente istantaneo e privo di volume, a singolo stadio. L’ipo-tesi che sta alla base di una tale semplificazione, similmente a quanto fattoper il compressore, e che la dinamica del componente turbina sia molto piuveloce delle due dinamiche meccaniche e della dinamica termica del siste-ma, cosicche il componente possa essere approssimato in modo quasi-statico.Similmente al compressore, il rapporto di espansione della turbina βHPT eparametrizzato, attraverso una mappa, su un parametro caratteristico che in-dividui il regime di funzionamento del componente: la velocita di rotazionen1, normalizzata rispetto al suo valore nominale.
βHPT = f(n1) (3.25)
Il rapporto di espansione cosı ottenuto e un β globale, che tiene conto di tuttigli eventuali stadi di una turbina reale.
La pressione a valle della turbina di alta pressione e quindi determinataa partire dal regime di rotazione normalizzato e dalla pressione p3 in cameradi combustione:
p4 = poutHPT = βHPT p3 = f(p3, n1) (3.26)
Alla turbina HPT giunge parte dell’aria spillata dal compressore, per ilraffreddamento delle palette, di quest’afflusso di aria si tiene conto con ilbilancio di portata:
g4 = goutHPT = g3 + gcool (3.27)
Per il calcolo della temperatura in uscita dalla turbina di alta pressione,necessaria poi al calcolo della potenza generata, si e fatto ricorso a una espan-sione isoentropica corretta con un rendimento: si trova prima la temperaturarelativa alla trasformazione isoentropica che porti il fluido alla stessa condi-zione di pressione prevista, si calcola il lavoro che produce tale espansionee infine questo valore di lavoro viene corretto con un rendimento isoentropi-co. Il valore del lavoro calcolato con il rendimento isoentropico viene quindidiviso per il calore specifico, determinato con la temperatura della trasfor-mazione isoentropica corrispondente, per ottenere la temperatura finale altermine dell’espansione reale.
T4is = T3(p4p3
)k3−1k3 = T3(βHPT )
k3−1k3 (3.28)
cp4is = f(T4is, FAR) (3.29)

44 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
LHPT = cp4is(T3 − T4is)ηHPT (3.30)
cp4 = f(T4) (3.31)
T4 = T3 −LHPTcp4
(3.32)
La potenza generata dalla turbina e immediatamente calcolabile, noto ilsalto entalpico fra l’imbocco e lo sbocco del componente:
PHPT = g3 h3 + gcool hcool − g4 h4 (3.33)
dove le entalpie sono calcolate nel modo seguente:
h3 = cp3 T3 (3.34)
hcool = cp2 T2 = cp21 T21 (3.35)
h4 = cp4 T4 (3.36)
L’entalpia viene calcolata utilizzando il modello di Guha per le proprietadei gas combusti di kerosene. Si noti che la portata gcool e composta disola aria alla temperatura di uscita dal plenum, in quanto e la portata d’ariautilizzata per raffreddare le palette della turbina. Questo comporta un nuovocalcolo del rapporto aria/combustibile FAR, che modifica quindi le proprietadei gas di scarico.
3.3.6 Turbina di potenza
La turbina di potenza (PT: power turbine) e stata modellata similmente aalla turbina generatrice di gas eccetto che per due differenze:
1. la turbina PT a differenza della turbina HPT non riceve una portatad’aria piu fresca per il raffreddamento delle palette;
2. la pressione a valle della turbina PT non puo assumere valori inferioria quelli della pressione esterna (condizione di flusso adattato).
La portata di gas elaborata dalla turbina PT, non essendoci ulterioriimmissioni di fluido, e la stessa che proviene dall’uscita della turbina HPT:
g5 = g4 (3.37)

3.3. COMPONENTI DEL MODELLO 45
La determinazione della pressione all’uscita della turbina avviene sempreattraverso una mappa, ma poiche in questo caso il componente deve lavo-rare in un regime di giri pressoche costante in quanto dalla sua velocita dirotazione dipende la velocita di rotazione del carico (rotore), non e possibileparametrizzare il β di espansione sul regime di rotazione n2. Il parametroscelto per la parametrizzazione del rapporto di espansione βPT e la tempera-tura in uscita dalla turbina generatrice di gas, normalizzata con il suo valorenominale.
βPT = f(T4) (3.38)
p5 = βPT p4 = f(p4, T4) (3.39)
in cui la pressione p5 non puo mai essere inferiore a quella atmosferica.Noto il valore di p5 e possibile determinare il valore di temperatura dei gasall’uscita della turbina tramite un’espansione isoentropica corretta con unrendimento, esattamente come fatto nel componente HPT.
T5is = T4(p5p4
)k4−1k4 (3.40)
cp5is = f(T5is, FAR5) (3.41)
LPT = cp5is(T4 − T5is) ηPT (3.42)
cp5 = f(T5, FAR) (3.43)
T5 = T4 −LPTcp5
(3.44)
La potenza, espressa in Watt, della turbina di potenza e proporzionale alsalto entalpico a cavallo del componente ed alla portata d’aria elaborata:
PPT = g5 (cp4 T4 − cp5 T5) (3.45)
3.3.7 Modello di carico semplificato
Dovendo provare il funzionamento del codice senza avere a disposizione finda subito un modello sofisticato di rotore da connettere al propulsore, e statomesso a punto un modello semplificato di carico, che riproducesse in manieraapprossimata il rotore dell’elicottero Sikorsky UH-60.
I dati del rotore considerato sono:

46 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
R
c
x
y
Figura 3.8: Pala di rotore semplificata.
• diametro rotore: D = 16.36 m;
• numero pale: 4;
• superficie del disco rotore: S = 210 m2;
• corda media della pala del rotore principale : c = 0.53 m;
• profilo utilizzato per le pale del rotore principale: SC1095;
• velocita angolare nominale del rotore ωROT = 240 RPM ;
Sotto le ipotesi di:
• volo in hovering (nessuna componente di velocita longitudinale);
• coppia resistente dovuta solo all alla resistenza delle pale del rotore;
• pala rettangolare non svergolata e rigida;
• movimenti di flappeggio e di comando trascurati;
• rapporto di trasmissione costante in ogni condizione di funzionamento;
• presenza di un solo tipo di profilo in tutta l’apertura;
• coefficiente di resistenza CD costante e pari a quello di massima effi-cienza del profilo;
• densita dell’aria costante e pari al valore standard ISA;
si e calcolata la resistenza per unita di lunghezza del profilo:
d =D
l=
1
2ρ v2 c CD (3.46)
Integrando la resistenza per unita di lunghezza sul Raggio del rotore R =D2
otteniamo la resistenza di una pala:

3.3. COMPONENTI DEL MODELLO 47
Dpala =
∫ R
0
1
2ρ v2 c CD dy (3.47)
Si noti che la velocita della sezione infinitesima del rotore dipende ingenerale dalla coordinata y e dalla velocita di volo dell’elicottero.
v = f(y, vvolo)
. Ad esempio per la pala che avanza parallela alla velocita di volo:
v(y, vvolo) = vvolo + ωROTy (3.48)
ma considerando come da ipotesi l’elicottero in hover (vvolo = 0):
v(y) = ωROT y (3.49)
Moltiplicando la resistenza di un tratto di pala infinitesimo per la suadistanza dal centro (coordinata y in figura 3.8), integrando il contributo infi-nitesimo sul raggio del rotore e moltiplicando per il numero di pale, otteniamola coppia esercitata dal rotore :
C = npale
∫Dpalady = 4
∫ R
0
1
2ρ v2 c CD y dy (3.50)
sostituendo alla velocita v(y) la sua espressione 3.49, otteniamo:
C = 4
∫ R
0
1
2ρ (ωROT y)2 c CD y dy (3.51)
dove, per le ipotesi prima descritte, e possibile estrarre dall’integrale tutti itermini non dipendenti da y e ottenere:
C = 2 ρ c CD ω2ROT [
y4
4]R0 =
1
2ρ c CD R4ω2
ROT (3.52)
Sappiamo che la velocita angolare del rotore e legata alla velocita dell’alberodi potenza n2 attaverso il rapporto di riduzione della trasmissione:
ωROT = n2 Rtrasmissione (3.53)
Essendo i regimi di rotazione nominali noti n2nom e ωROT , allora e noto ancheil rapporto di trasmissione:
Rtrasmissione =n2nominale
ωROTnominale
(3.54)

48 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
0 0.5 1 1.5 2 2.5
x 104
0
0.5
1
1.5
2
2.5
3x 10
6
Angular Speed [RPM]
Pow
er[W
]
PCARICO
PNOMINALE
punto di funzionamento nominale
Figura 3.9: Potenza richiesta dal carico modellato in funzione della velocitadi rotazione n2 confrontata con i valori di potenza e velocita di rotazionenominali per il motore GE t700.
Sostituendo la 3.53 nella 3.52 e quindi possibile scrivere il valore di coppiarichiesta dal carico:
CLOAD(n2) =1
2ρ c CD R4 (n2 Rtrasmissione)
2 = KR n22 (3.55)
Nella 3.55 e possibile notare che la coppia richiesta dal carico e una funzionequadratica della velocita di rotazione n2. La costante KR e pari a:
KR =1
2ρ c CD R4 R2
trasmissione (3.56)
La potenza dissipata dal carico e quindi ottenibile moltiplicando la coppiaCLOAD per la velocita di rotazione dell’albero:
PLOAD = CLOAD n2 = KR n32 (3.57)
Si riporta in figura 3.9 l’andamento della potenza richiesta dal carico cosımodellato in funzione della velocita di rotazione n2.
3.3.8 Dinamica degli alberi di trasmissione
Note le potenze espresse dalle turbine PPT e PHPT , la potenza richiesta dalcompressore PC , la potenza richiesta dal carico PLOAD e le inerzie dei due

3.4. DINAMICA DEL SISTEMA E METODO DI SOLUZIONE 49
alberi di rotazione JPT e JHPT (intese come inerzie complessive dell’albero edegli elementi a lui connessi: compressori, turbine, carichi, ecc..), e possibilescrivere le dinamica meccaniche del motore, che traduce il principio di con-servazione del momento angolare. Nella loro modellazione si e tenuto contodi alcune perdite per attrito, modellate come frazioni delle potenze delle tur-bine: PfHPT
e PfPTsono le potenze perdute rispettivamente sull’albero della
turbina generatrice di gas e sull’albero della turbina di potenza:
PfHPT= Kf1 PHPT (3.58)
PfPT= Kf2 PPT (3.59)
dove Kf1 e Kf2 sono moltiplicatori che esprimono la frazione di potenza persain attriti (attriti meccanici, resistenza sul disco dei rotori, e potenza perdutaper muovere eventuali utenze ausiliarie). Nel modello si e implmentato unvalore di qualche centesimo, in linea con [7].
L’equilibrio dei momenti e esprimibile come:
dω
dt=
P
Jω(3.60)
dove J e il momento di inerzia del corpo rotante, P la potenza delle forzeagenti sul sistema, ω la velocita angolare.
Le espressioni delle dinamiche meccaniche sui due alberi si possono scri-vere esplicitando le accelerazioni angolari come:
n1 =PHPT − PC − PfHPT
JHPTn1
(3.61)
n2 =PPT − Pload − PfPT
JPTn2
(3.62)
3.4 Dinamica del sistema e metodo di solu-
zione
La dinamica del sistema e governata da equazioni algebriche ed equazionidifferenziali. Le grandezze che sono determinate da equazioni differenziali,tutte del primo ordine, sono tre:
• la dinamica meccanica determina le accelerazioni angolari dei due alberin1 e n2;
• la dinamica termica determina la variazione temporale di temperaturain camera di combustione T3.

50 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
Il sistema di 3 equazioni differenziali 3.63 accoppiate e equazioni algebri-che fornisce quindi i tre residui T3, n1 e n2:
n1 =PHPT − PC − PfHPT
JHPT n1
n2 =PPT − Pload − PfPT
JPT n2
T3 =R T3 k3
p2 yCC VCC cp3[g2 cp2 T2 + gb(cvb hb + ηb LHV )− (g2 + gb)cp3 T3]
(3.63)Il sistema di 3 equazioni differenziali 3.63 accoppiate e equazioni algebrichefornisce quindi i tre residui T3, n1 e n2. L’integrazione dei tre residui fornisceil vettore di stato del sistema.
I residui sono ordinabili in un vettore y′:
y′ =( n1n2
T3
)Definiamo y il vettore degli stati:
y =( n1n2T3
)Alcune variabili del motore (rapporti di compressione ed espansione, por-
tate), come gia visto, dipendono attraverso delle mappe dagli stati del si-stema, poiche alcune di esse sono parametrizzate su n1, mentre altre su T4,che e uno stretto parente di T3. La valutazione di queste grandezze richiedequindi la soluzione del sistema, ma a meno di utilizzare gli stati calcolati adun’istante precedente, essa non e ancora disponibile all’inizio dell’iterazione:il sistema e quindi implicito.
Generalizzando quindi il problema si presenta nella forma:
y = f(y, y′, t) (3.64)
Per risolvere e integrare ad ogni passo un’equazione tipo la 3.64 e neces-sario un solutore per equazioni differenziali implicite in quanto il sistema eimplicito, poiche lo stato dipende dal valore di se stesso allo stesso istante(ad esempio la portata in uscita dal plenum e funzione della accelerazione dirotazione n1) ed e quindi necessario procedere numericamente risolvendo ilsistema fino a convergenza.
Per quanto riguarda i solutori impiegati, si rimanda al capitolo sull’im-plementazione.

3.5. PARAMETRIZZAZIONE 51
DATI NASA GE T700
PARAMETRI NUOVO MOTORE
NORMALIZZAZIONE CON VALORI NOMINALI A REGIME
GENERAZIONE MAPPEGE T700
SCALATURA
PARAMETRI MOTOREGE T700
MAPPE ADATTATE AL NUOVO MOTORE
Figura 3.10: Diagramma di flusso per il processo di generazione eadattamento delle mappe delle turbomacchine.
Test Case FUEL FLOW [lb/h] P1 [PSI] T1 [◦R] P5 [PSI]1 140.1 14.37 516.7 14.372 297.2 14.17 515.6 14.433 372.0 14.16 508.3 14.464 458.4 14.09 508.0 14.605 560.4 14.02 507.2 14.636 694.4 13.92 507.2 14.72
Tabella 3.2: Dati ricavati da test NASA su motore GE t700 (prima parte).
3.5 Parametrizzazione
Per la determinazione di alcune grandezze di interesse per la simulazione delleturbomacchine sono state impiegate delle mappe, messe a punto partendoda alcuni dati sperimentali ( riassunti nella tabella 3.2 e nella tabella 3.3)disponibili dal report NASA [5] e relativi a prove effettuate al banco sulpropulsore General Electric t700 nella configurazione utilizzata sull’elicotteroSikorsky UH-60.
Ogni mappa e ottenuta interpolando i punti sperimentali attraverso unafunzione lineare a tratti (usando la funzione interp1 in linguaggio Matlab o gslinterp linear in linguaggio C usando le librerie GSL). Si e scelto di utilizzare
Test Case n1 [%] n2 [%] g21 [lb/s] p21 [PSI] T21[PSI] T4 [R]1 65.9 52.6 3.2 58.0 832.0 14132 84.7 95.7 5.16 113.1 1026.0 15773 87.7 95.7 6.16 139.0 1081 16264 90.4 95.7 6.92 161.1 1127 17315 92.6 95.7 7.66 184.8 1173 18386 95.9 95.7 8.5 211.9 1228 1974
Tabella 3.3: Dati ricavati da test NASA su motore GE t700 (seconda parte).

52 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
una spezzata interpolante passante per i punti considerati per semplicita, mal’utilizzo di una funzione interpolante con derivate continue e possibile e diagevole implementazione.
Tali mappe sono state utilizzate per la determinazione di:
• portata elaborata dal compressore: g21,
• rapporto di compressione del compressore: βC ,
• rapporto di espansione della turbina di alta pressione: βHPT ,
• rapporto di espansione della turbina di potenza: βPT .
I parametri sui quali sono parametrizzati la portata e i rapporti di espan-sione appena elencati sono stati scelti in base ai dati sperimentali disponibilie in base al legame che intercorre fra i componenti del motore.
Per le mappe che decidono il funzionamento della prima parte del motore,ovvero per i componenti calettati sull’albero della turbina generatrice di gas,si e scelto di far variare le mappe con la velocita di rotazione n1. Tale sceltae pressoche obbligata in quanto il parametro che caratterizza il punto difunzionamento dei componenti compressore e turbina HPT e proprio il lororegime di rotazione.Si ha quindi:
βHPT = f(n1)
βC = f(n1)
g21 = f(n1)
Per la turbina di potenza la scelta della variabile di parametrizzazione estata piu complessa, in quanto il regime di rotazione dell’albero della turbinadi potenza si deve mantenere costante in ogni condizione di funzionamentodel motore. Tale peculiarita, e la disponibilita di pochi parametri speri-mentali (riportati tutti nelle tabelle 3.2 e 3.3), hanno portato a scegliere latemperatura T4 all’uscita dalla turbina generatrice di gas come parametrocaratterizzante il regime di funzionamento della turbina di potenza.
βPT = f(T4)
Le mappe ricavate dai dati NASA sono state adimensionalizzate rispettoai valori nominali a regime, cosı da renderle estendibili a ogni possibile mo-tore, noti i suoi parametri caratteristici (si veda a riguardo il diagramma infigura 3.10). Le dipendenze dei vari parametri sono quindi riferite ai valoridei parametri normalizzati:
βHPT = f(n1)

3.5. PARAMETRIZZAZIONE 53
βC = f(n1)
g21 = f(n1)
βPT = f(T 4)
dove i parametri soprasegnati sono normalizzati rispetto al loro valorenominale:
a =a
anominal
Per l’estensione delle mappe ad un qualsiasi propulsore devono essere noti deiparametri che si riferiscano al suo funzionamento nominale, mentre la formadella mappa viene generata a partire dal funzionamento del motore GE t700in 6 situazioni di trim riprodotte al banco sperimentalmente.
L’elenco dei parametri da reperire per la scalatura della mappa ad unparticolare propulsore sono:
• n1nom: valore nominale della velocita di rotazione dell’albero dellaturbina generatrice di gas,
• n2nom: valore nominale della velocita di rotazione dell’albero dellaturbina di potenza,
• βCnom: valore nominale del rapporto di compressione totale (tutti glistadi) del compressore,
• βHPTnom: valore nominale del rapporto di espansione complessivo dellaturbina generatrice di gas,
• βPTnom: valore nominale del rapporto di espansione complessivo dellaturbina di potenza,
• gcomprnom : valore nominale della portata elaborata dal compressore alregime nominale,
• gbnom: valore nominale della portata di carburante,
• T4nom: valore nominale della temperatura in uscita dalla turbina ge-neratrice di gas.
Nella figura 3.13 e riportata la mappa normalizzata del rapporto di espan-sione della turbina di potenza: in ascissa e riportata la frazione di tempera-tura in uscita dalla turbina di potenza.
Nella figura 3.11 sono riportate le mappe del rapporto di compressionenormalizzato del compressore e del rapporto di espansione normalizzato della

54 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
0 0.2 0.4 0.6 0.8 1 1.2 1.40
1
2
3
4
5
6
Normalized angular velocity n1/n1NOM
Nor
mal
ized
Pre
ssur
e R
atio
β/β
NO
M
NORMALIZED MAPS
β
C
βHPT
Figura 3.11: Rapporti di compressione/espansione normalizzati.
turbina HPT, entrambi parametrizzati sul regime di rotazione normalizzaton1. Si noti come entrambe le mappe passino per il punto (1, 1), che e il puntodi funzionamento nominale.
Nella figura 3.12 e riportata la mappa della portata di aria elaborata dalcompressore in funzione di n1.
3.5.1 Esempio di adattamento delle mappe per un ge-nerico motore
Nelle figure 3.15 , 3.16, 3.11 si riporta un esempio di adattamento delle mappenormalizzate a un ipotetico motore, avente i seguenti parametri:
• n1nom = 75000 RPM ,
• n2nom = 31000 RPM ,
• βcnom = 25.5,
• βHPT nom = 0.25,
• βPT nom = 0.58,
• gcompressorenom = 7 kg/s,
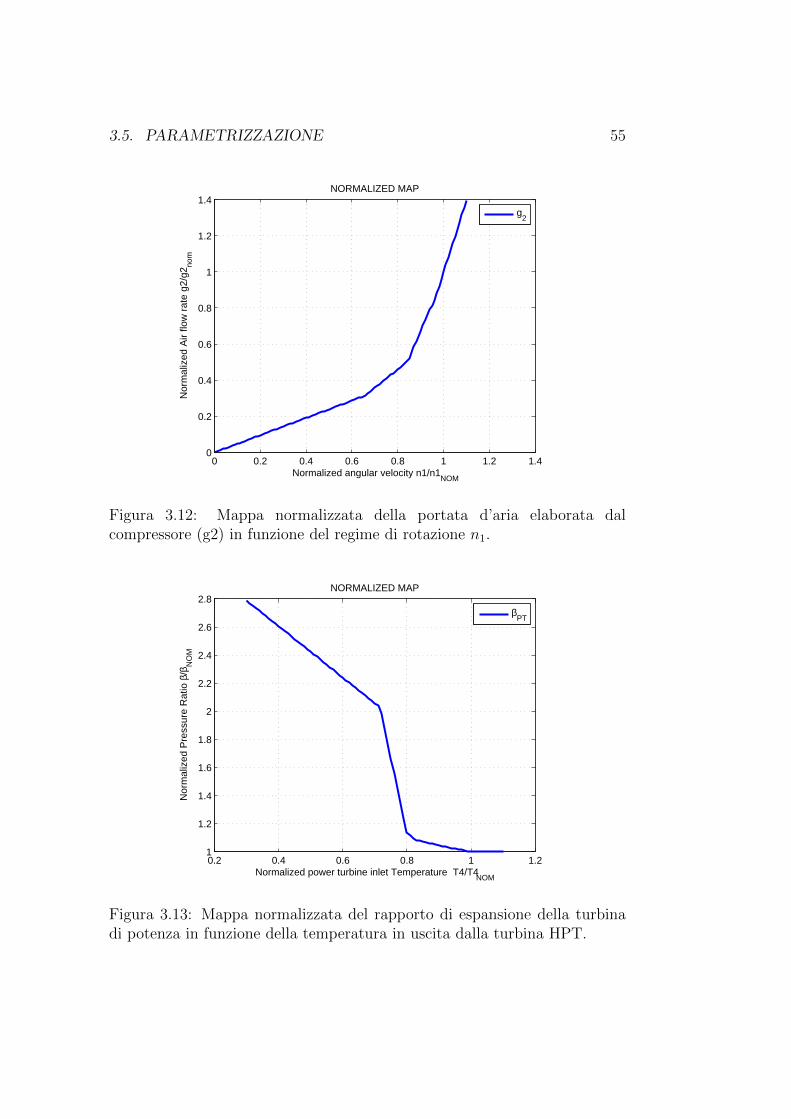
3.5. PARAMETRIZZAZIONE 55
0 0.2 0.4 0.6 0.8 1 1.2 1.40
0.2
0.4
0.6
0.8
1
1.2
1.4
Normalized angular velocity n1/n1NOM
Nor
mal
ized
Air
flow
rat
e g2
/g2 no
mNORMALIZED MAP
g
2
Figura 3.12: Mappa normalizzata della portata d’aria elaborata dalcompressore (g2) in funzione del regime di rotazione n1.
0.2 0.4 0.6 0.8 1 1.21
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
Normalized power turbine inlet Temperature T4/T4NOM
Nor
mal
ized
Pre
ssur
e R
atio
β/β
NO
M
NORMALIZED MAP
β
PT
Figura 3.13: Mappa normalizzata del rapporto di espansione della turbinadi potenza in funzione della temperatura in uscita dalla turbina HPT.

56 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE
0 0.2 0.4 0.6 0.8 1 1.2 1.40
5
10
15
20
25
30
35
Normalized Angular velocity n1/n1NOM
Pre
ssur
e R
atio
ADAPTED MAPS
β
C
βHPT
Figura 3.14: Mappa dei βcompressore e βHPT adattata ad un generico motore.
• gbnom = 0.25 kg/s,
• T4nom = 900 K.

3.5. PARAMETRIZZAZIONE 57
0 0.2 0.4 0.6 0.8 1 1.2 1.40
1
2
3
4
5
6
7
8
9
10
Normalized Angular velocity n1/n1NOM
Air
flow
rat
e [K
g/s]
ADAPTED MAP
g
2
Figura 3.15: Mappa (adattata ad un ipotetico motore) della portata d’ariaelaborata dal compressore (g2) in funzione del regime di rotazione n1.
0.2 0.4 0.6 0.8 1 1.20.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Normalized power turbine inlet Temperature T4/T4NOM
Pre
ssur
e R
atio
β
ADAPTED MAP
β
PT
Figura 3.16: Mappa (adattata ad un ipotetico motore) del rapporto di espan-sione della turbina di potenza in funzione della temperatura in uscita dallaturbina HPT.

58 CAPITOLO 3. FISICA DEL PROBLEMA E MODELLAZIONE

Capitolo 4
Implementazione
4.1 Requisiti del codice
L’implementazione del codice e avvenuta tenendo conto dei requisiti previstiper la sua esecuzione all’interno di un simulatore o comunque di un’interfacciadi simulazione :
• esecuzione real-time;
• facilita di interfacciarsi con diversi programmi (simulatori, interfaccegrafiche stand-alone);
• possibilita di adattare rapidamente la simulazione all’applicazione mo-toristica desiderata.
Si e scelto di implementare il primo modello in Matlab, per i notevoli van-taggi che un linguaggio di alto livello orientato al calcolo numerico comportanella prima parte di stesura di un codice di questo genere:
• velocita di scrittura;
• facilita di elaborazione dei dati;
• possibilita di sfruttare funzioni complesse gia implementate (integrato-ri, ecc..);
• documentazione vasta e chiara.
L’implementazione in Matlab presenta diversi limiti:
• difficolta di interfacciare il codice Matlab con altri software;
• scarsa efficienza computazionale del linguaggio.
59

60 CAPITOLO 4. IMPLEMENTAZIONE
Per questi motivi il codice Matlab, gia validato, e stato successivamentetradotto in linguaggio C attraverso la creazione di una DLL (Dinamic LinkLibrary: libreria a collegamento dinamico). L’implementazione sotto formadi DLL in C permette di:
• utilizzare uno dei linguaggi di programmazione piu efficienti;
• eseguire il codice chiamando la DLL da un qualsiasi altro programma;
• eseguire facilmente il codice su qualsiasi piattaforma;
• caricare selettivamente le varie DLL e da piu programmi contempora-neamente;
• applicare modifiche al modello modificando soltanto la libreria DLLsenza modificare tutti i codici chiamante.
La traduzione del codice dal linguaggio Matlab al linguaggio C sotto for-ma di DLL ha necessariamente comportato diversi adattamenti, ad esempiorichiedendo la sostituzione delle funzioni native di Matlab (interpolazione at-traverso INTERP1, POLYFIT, ecc..), con funzioni implementate in C. Dovepossibile si sono utilizzate funzioni facente parte delle GSL (Gnu Scienti-fic Libraries), librerie di funzioni per il calcolo scientifico ben documentate emolto vaste, sebbene non intuitive nell’uso come le funzioni native di Matlab.Dove non e stato possibile utilizzare funzioni o procedure gia disponibili, si ecreata la funzione relativa, inclusa poi nella DLL come funzioni di supporto.
4.2 Genesi e struttura del codice Matlab
Il codice implementato in Matlab ha subito diverse modifiche nel tempo,sia a livello di struttura che a livello di relazioni fisiche implementate. Sie dapprima implementato un modello fortemente parametrizzato, in cui ladeterminazione degli stati termodinamici delle varie sezioni del motore e de-terminato da alcune mappe ricavate dal funzionamento a regime del solitomotore GE t700. Le varie versioni di questo tipo di modello molto parame-trizzato sono state identificate con le lettere dell’alfabeto greco: α, β, γ. Ilcodice Matlab nella sua versione γ (dipendente da mappe parametriche per ladeterminazione di ogni stato termodinamico) e stata validata confrontandoi risultati che si ottenevano dalle simulazioni con dati sperimentali ricavatidalla letteratura.
Successivamente, validato il codice γ, si e deciso di rendere il modello menodipendente da parametri e quindi di modellare le trasformazioni che il fluido

4.2. GENESI E STRUTTURA DEL CODICE MATLAB 61
subisce all’interno del ciclo termodinamico come espansioni e compressionireali. Il codice a cui si e giunti finalmente al termine delle fasi di modellazione,implementazione, taratura e validazione e stato denominato codice ISO, arimarcare il fatto che le trasformazioni che avvengono nelle turbomacchinesono compressioni o espansioni isoentropiche corrette con un rendimento.Tale modello e meno vincolato al sistema di partenza da cui sono stati ricavatii parametri, il motore GE t700, e quindi ci si aspetta che riproduca menofedelmente del modello γ il comportamento di tale propulsore, ma sia meglioadattabile ad altri sistemi.
Nel capitolo riguardante la validazione si confronteranno i risultati otte-nuti dalle simulazioni effettuate con il codice ISO e con il codice γ e i datisperimentali, mettendo quindi in relazione gli errori dei due modelli.
4.2.1 Modello γ - Matlab
Il modello γ presenta una struttura modulare, dove ogni componente delsistema e rappresentato da una funzione. Le variabili in uscita dalla funzionerappresentano gli ingressi per un’altra funzione: ad esempio la portata d’ariain uscita dalla funzione compressore sara un ingresso per la funzione plenum,che viene eseguita dopo la funzione compressore. Ordinando in questo modoil codice e stato possibile isolare i bachi del codice provando separatamentele varie funzioni. I vari moduli che compongono il modello sono:
• compressore,
• plenum1,
• combustore,
• HPT,
• PT,
• spool 1,
• spool 2.
I moduli che al loro interno implementano una dinamica (Combustore -T3, Spool 1 - n1, Spool 2 - n2), restituiscono in uscita un residuo, ovverola derivata dello stato del sistema, e ad ogni iterazione i residui verrannointegrati dall’integratore per fornire i nuovi stati e quindi la nuova soluzione.
Gli stati termodinamici (pressioni, temperature e portate) relativi ai bloc-chi che implementano le turbomacchine in questo modello vengono generati

62 CAPITOLO 4. IMPLEMENTAZIONE
TEMPO:dutata simulazione t_fin
passo temporale dt
MAPPEDATI:
parametricondizioni iniziali
INGRESSI:g_b
g_cool
PRESA D’ARIA COMPRESSORE PLENUM 1 COMBUSTORE HPT PT CARICO
SPOOL 1SPOOL 2
INTEGRATORE
dN1/dt, dN2/dt
N1,N2
Figura 4.1: Schema del codice γ implementato in Matlab.
tramite delle mappe, che forniscano la grandezza desiderata in funzione delparametro utilizzato nella modellazione. Cosı la temperatura, la pressione ela portata in uscita dal compressore sono funzioni della velocita di rotazionedell’albero della turbina generatrice di gas attraverso una mappa:
T21 = f(n1)
p21 = f(n1)
g21 = f(n1)
Anche la temperatura e la pressione (o il rapporto di espansione) in uscitadalla turbina HPT sono funzioni della velocita di rotazione dell’albero dellaturbina generatrice di gas:
T4 = f(n1)
βHPT = f(n1)
Mentre per quanto riguarda la temperatura in uscita dalla turbina PT, e ilrapporto di espansione della turbina PT , essi sono funzioni della temperaturaT4 in uscita dalla turbina HPT:

4.2. GENESI E STRUTTURA DEL CODICE MATLAB 63
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 104
250
300
350
400
450
500
550
600
650
700
N1 [giri/min]
Tem
p [K
]TEMPERATURA USCITA COMPRESSORE
Mappe modificatepunti LEWISretta su dato singolo Lewisspezzata sperimentale
Figura 4.2: Mappa della temperatura in uscita dal compressore in funzionedel regime di rotazione n1 nel modello γ per il motore GE t700.
T5 = f(T4)
βPT = f(T4)
Le mappe sono funzioni continue della variabile su cui si e parametrizzatoil dato di interesse. Esse interpolano i dati sperimentali dei 6 casi di trim delreport [5]. Come funzione interpolante e stata scelta una spezzata (funzionelineare a tratti): si sono confrontati i risultati ottenuti attraverso l’impiego dialtre funzioni (spline cubiche, polinomi di ordine 2,3,4), ma dal momento chele differenze di funzionamento del codice erano minime si e scelto di utilizzaresemplici spezzate lineari per semplicita della formulazione. Si e anche pen-sato di utilizzare come funzioni interpolanti dei polinomi che minimizzasserol’errore dello stato termodinamico in relazione al dato sperimentale (mappemodificate), opzione che e stata poi scartata perche introduceva nel modelloun grado di aleatorieta che difficilmente avrebbe trovato riscontro in un’ap-plicazione diversa da quella del motore GE t700 utilizzato per la generazionedelle mappe e poi la valutazione degli errori. Un esempio di mappa per ilmodello γ e visibile in figura 4.2, dove e riportata la temperatura in uscitadal compressore in funzione del regime di rotazione del primo albero.
La modularita del codice gamma e apprezzabile nel listato che ne richiamain successione i componenti ad ogni iterazione:

64 CAPITOLO 4. IMPLEMENTAZIONE
% PRESA D’ARIA
p1(i)=p_tot(i);
T1(i)=T_tot(i);
rho(i)=rho_0;
%COMPRESSORE
[p21(i),T21(i),g21(i),P_c(i)]=compressore(p1(i),T1(i),T21(i-1),...
n1(i-1),pg2s,pbetac,pT21,P_pt(i-1),P_f_hpt(i-1));
%PLENUM 1
[p2(i),T2(i),g2(i),g_cool(i),tau_p(i)]=plenum1(p21(i),T21(i),g21(i),...
g_b(i),dt,p2(i-1),V_p1);
%CAMERA DI COMBUSTIONE
[g_gas(i),p3(i),T3(i),dT3(i),iter_comb(i),err_comb(i)]=combustore(p2(i),T2(i),g2(i),...
g_b(i),T3(i-1),dt,LHV,T3max,dT3(i-1));
%TURBINA GENERATRICE DI GAS
[p4(i),T4(i),P_hpt(i),g4(i)] = hpt(p3(i),T3(i),T4(i-1),g_gas(i),...
g_cool(i),T21(i),pT4, n1(i-1),g_b(i),pbetahpt);
%TURBINA DI POTENZA
[p5(i),T5(i),P_pt(i)]=powerturbine(p4(i),T4(i),T5(i-1),g4(i),p_atm,...
n1(i),g_b(i),pbetapt);
%CARICO
[C_ass(i),vel_rotore(i)]=caricoLEWIS(n2(i-1),pcl,g_b(i));
P_load(i)=C_ass(i)*n2(i-1)*0.104719755; %[W]potenza carico
%DINAMICA ALBERI DI TRASMISSIONE
%modellazione perdite per attrito:
P_f_hpt(i)=abs(P_hpt(i)*0.01); %[W]pot perduta in attr.mecc=1/100 Pot hpt
P_f_pt(i)=abs(P_pt(i)*0.01); %[W]pot perduta in attr.mecc=1/100 Pot pt
%calcolo accelerazioni angolari:
[n1_p(i)]=spool1(P_hpt(i),P_c(i),P_f_hpt(i),J_hpt,n1(i-1));
[n2_p(i)]=spool2(P_pt(i),P_load(i),P_f_pt(i),J_pt,n2(i-1));
%INTEGRAZIONE
%Crank Nicholson
n1(i)=n1(i-1)+0.5*dt*(n1_p(i-1)+n1_p(i));
n2(i)=n1(i-1)+0.5*dt*(n2_p(i-1)+n2_p(i));
Si noti come essendo la formulazione del modello gamma esplicita, sia pos-sibile integrare le 2 equazioni dinamiche della meccanica del modello espli-citamente con il metodo dei trapezi (o di Crank-Nicholson). La dinamicatermica infatti, ritenuta molto piu veloce delle dinamiche meccaniche, vienerisolta all’interno del componente Bruciatore, con un limite di iterazioni mas-sime per non sforare oltre il tempo massimo di calcolo per il passo temporale
4.2. GENESI E STRUTTURA DEL CODICE MATLAB 65
considerato. Nel caso il componente non converga sulla temperatura T3 nelnumero di iterazioni massimo con la tolleranza assegnata, l’utente ne vieneinformato con un segnale di attenzione.
Il modello cosı implementato ha fornito buoni risultati se paragonato aidati sperimentali disponibili. La convergenza si e sempre rivelata soddisfa-cente con passi temporali dell’ordine del decimo di secondo, sebbene sia statarilevata una certa difficolta quando venivano forniti ingressi con variazionirepentine della portata di carburante.
Si raccomanda quindi, qualora interessi implementare il codice del model-lo gamma, di tarare il FADEC in modo che la derivata temporale della por-tata di carburante immessa in camera di combustione sia sempre in modulominore del valore che impedisce la convergenza del sistema.
4.2.2 Modello ISO - Matlab
Il modello ISO implementa espansioni e compressioni reali per determinaregli stati termodinamici del fluido dopo il passaggio nelle turbomacchine edutilizza delle mappe parametriche solo per la determinazione di portata d’ariaelaborata dal compressore e rapporti di espansione o compressione delle treturbomacchine. Il modello numerico e quindi quello del capitolo relativo allamodellazione, con le dinamiche riassunte nel sistema 3.63.
Le funzioni implementate nel modello ISO sono:
• ENGINEnew2.m: dinamica del motore;
• ENGINEparameters.m: personalizzazione dei parametri caratteristicidel motore;
• NEWMAPS.m: generazione delle mappe normalizzate utilizzate nelleturbomacchine;
• INITIALconditions.m: assegnamento delle condizioni iniziali per lasimulazione;
• FUELflow.m: assegnamento degli ingressi del motore (portata di com-bustibile gb);
• ENGINEload.m: modello di carico che si interfaccia col motore.
L’implementazione della dinamica del modello ISO e avvenuta, a diffe-renza del modello γ, in un’unica funzione principale denominata ENGINE-new2.m la cui sintassi e del tipo:
function [ep] = ENGINEnew2(t,y,yp)

66 CAPITOLO 4. IMPLEMENTAZIONE
Il vettore [ep] raccoglie la differenza fra le derivate degli stati calcolate dallafunzione (T3, n1, n2) e i residui (yp) calcolati al passo precedente e forniti iningresso alla funzione insieme al valore degli stati (y). Il vettore [ep] e quindicomposto da:
en1 = n1 − yp(1) (4.1)
en2 = n2 − yp(2) (4.2)
eT3 = T3 − yp(3) (4.3)
e risulta quindi[ep] = [en1 ; en2 ; eT3 ]
Il vettore [ep] e quello che servira alla funzione integratrice ode15i per iteraree integrare i residui del sistema.
Le condizioni iniziali di tutte le variabili del motore vengono assegnateall’interno della funzione INITIALconditions.m; l’assegnamento delle condi-zioni iniziali deve essere consistente, ovvero deve essere:
[ep] = 0
o in altri termini, facendo riferimento al sistema 3.63:
f(t0, y0, yp0) = 0
Qualora gli stati termodinamici iniziali siano lontani da un punto consistenteper il modello, durante la fase di integrazione si andra incontro a problemidi convergenza. Per ovviare a questo problema si puo calcolare un punto dipartenza consistente perturbando il modello fino a fare raggiungere al sistemauna condizione iniziale consistente. In Matlab la funzione decic.m permettedi calcolare la condizione iniziale consistente da cui far partire l’integrazionecon le funzioni ode; e possibile specificare alla funzione decic quali stati epossibile variare e quali invece devono essere mantenuti fissi.
Le mappe relative al funzionamento delle turbomacchine vengono gene-rate attraverso la funzione NEWMAPS.m: essa genera delle mappe norma-lizzate a partire dai dati sperimentali disponibili dal report [5]. Tali mappeandranno poi scalate attraverso i parametri caratteristici del motore consi-derato nella singola simulazione. Le mappe necessarie al funzionamento delmodello ISO sono:
• mappa per il rapporto di compressione normalizzato del compressore:
βCompressore = f(n1)
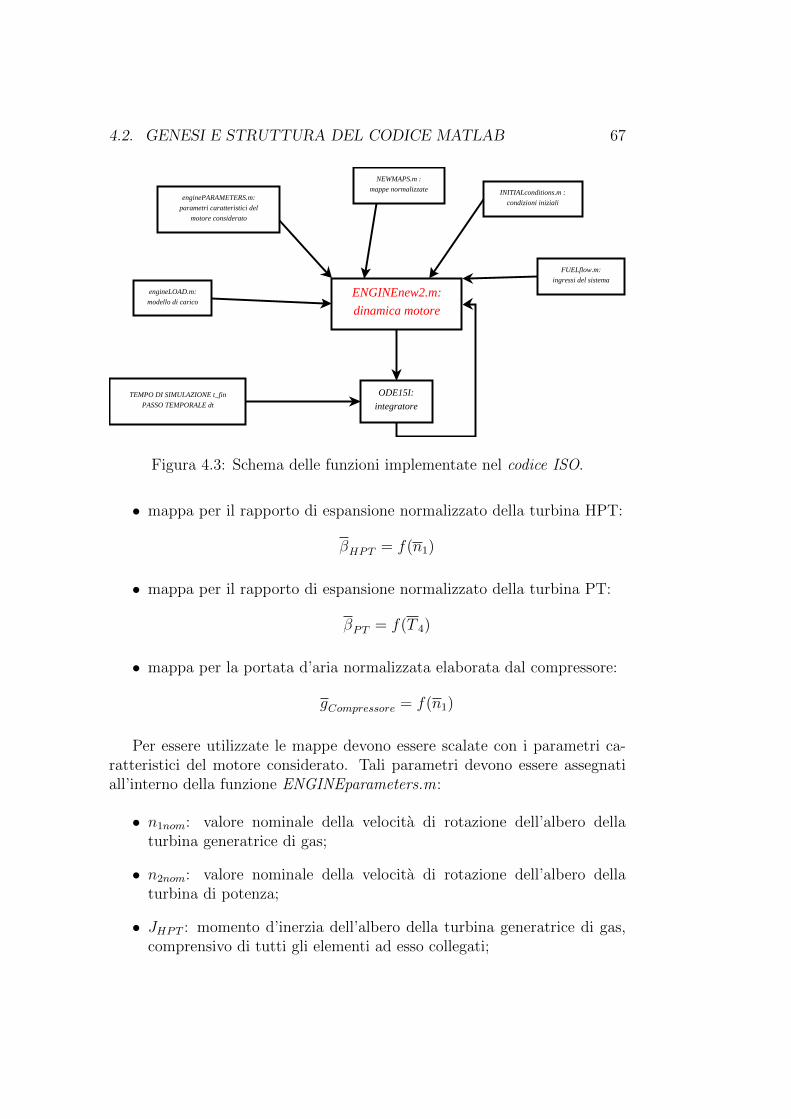
4.2. GENESI E STRUTTURA DEL CODICE MATLAB 67
TEMPO DI SIMULAZIONE t_fin
PASSO TEMPORALE dt
enginePARAMETERS.m:
parametri caratteristici del
motore considerato
NEWMAPS.m :
mappe normalizzate INITIALconditions.m :
condizioni iniziali
FUELflow.m:
ingressi del sistema
ENGINEnew2.m:
dinamica motore
engineLOAD.m:
modello di carico
ODE15I:
integratore
Figura 4.3: Schema delle funzioni implementate nel codice ISO.
• mappa per il rapporto di espansione normalizzato della turbina HPT:
βHPT = f(n1)
• mappa per il rapporto di espansione normalizzato della turbina PT:
βPT = f(T 4)
• mappa per la portata d’aria normalizzata elaborata dal compressore:
gCompressore = f(n1)
Per essere utilizzate le mappe devono essere scalate con i parametri ca-ratteristici del motore considerato. Tali parametri devono essere assegnatiall’interno della funzione ENGINEparameters.m:
• n1nom: valore nominale della velocita di rotazione dell’albero dellaturbina generatrice di gas;
• n2nom: valore nominale della velocita di rotazione dell’albero dellaturbina di potenza;
• JHPT : momento d’inerzia dell’albero della turbina generatrice di gas,comprensivo di tutti gli elementi ad esso collegati;
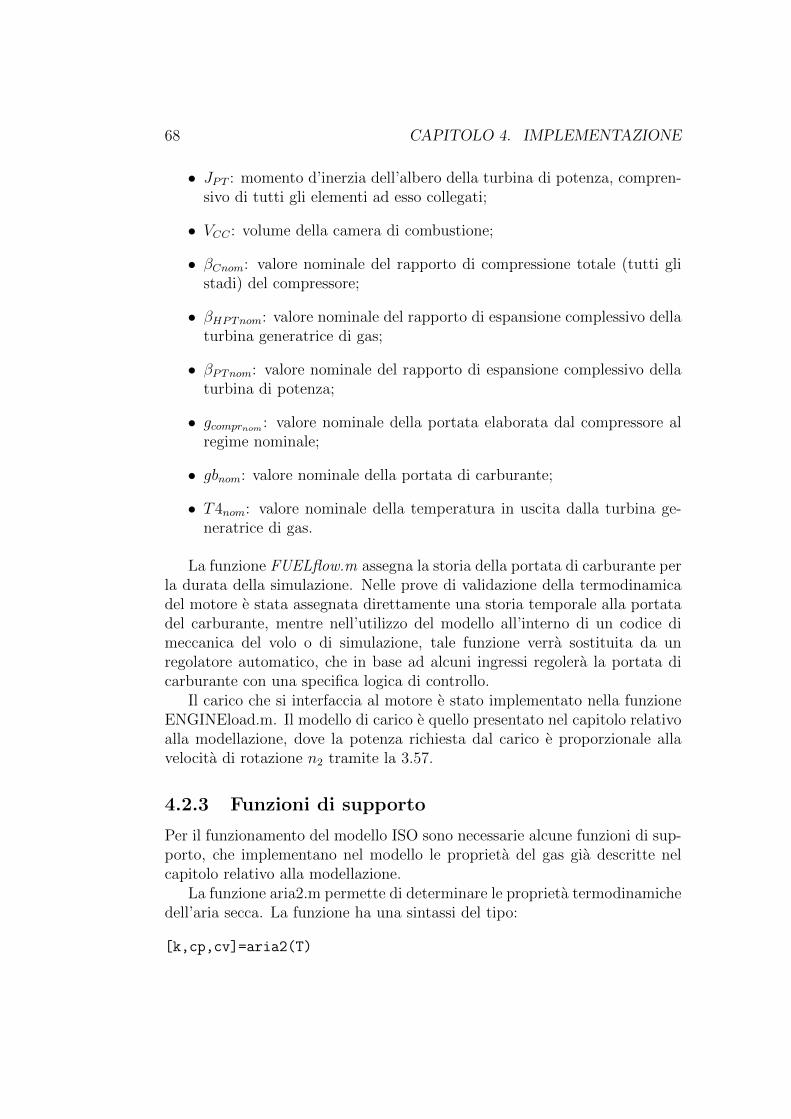
68 CAPITOLO 4. IMPLEMENTAZIONE
• JPT : momento d’inerzia dell’albero della turbina di potenza, compren-sivo di tutti gli elementi ad esso collegati;
• VCC : volume della camera di combustione;
• βCnom: valore nominale del rapporto di compressione totale (tutti glistadi) del compressore;
• βHPTnom: valore nominale del rapporto di espansione complessivo dellaturbina generatrice di gas;
• βPTnom: valore nominale del rapporto di espansione complessivo dellaturbina di potenza;
• gcomprnom : valore nominale della portata elaborata dal compressore alregime nominale;
• gbnom: valore nominale della portata di carburante;
• T4nom: valore nominale della temperatura in uscita dalla turbina ge-neratrice di gas.
La funzione FUELflow.m assegna la storia della portata di carburante perla durata della simulazione. Nelle prove di validazione della termodinamicadel motore e stata assegnata direttamente una storia temporale alla portatadel carburante, mentre nell’utilizzo del modello all’interno di un codice dimeccanica del volo o di simulazione, tale funzione verra sostituita da unregolatore automatico, che in base ad alcuni ingressi regolera la portata dicarburante con una specifica logica di controllo.
Il carico che si interfaccia al motore e stato implementato nella funzioneENGINEload.m. Il modello di carico e quello presentato nel capitolo relativoalla modellazione, dove la potenza richiesta dal carico e proporzionale allavelocita di rotazione n2 tramite la 3.57.
4.2.3 Funzioni di supporto
Per il funzionamento del modello ISO sono necessarie alcune funzioni di sup-porto, che implementano nel modello le proprieta del gas gia descritte nelcapitolo relativo alla modellazione.
La funzione aria2.m permette di determinare le proprieta termodinamichedell’aria secca. La funzione ha una sintassi del tipo:
[k,cp,cv]=aria2(T)

4.3. STRUTTURA DEL CODICE C 69
L’help scritto per la funzione ne spiega il funzionamento:
ARIA2 [k,Cp,Cv]=aria2(T) funzione che fornisce le proprieta
termodinamiche dell’aria, assunta gas perfetto,
ricevendo in ingresso la temperatura dell’aria alla
quale si vogliono valutare.
Cp = [J/KgK] calore specifico a pressione costante
Cv = [J/KgK] calore specifico a volume costante
k = [adim] rapporto calori specifici
T = [K] temperatura dell’aria
ARIA2 e ottenuta interpolando dati sperimentali con un polinomio in-terpolante di ordine 2.
Similmente a quanto fatto per l’aria, si e impiegata una funzione checalcolasse le proprieta termodinamiche dei gas di combustione. Il modelloimpiegato per i gas combusti e quello messo a punto da Guha nel 2000 (ri-ferimento [12]). La funzione di riferimento per i gas combusti e la funzionekerosene.m. Essa ha la sintassi:
[k,cp,R] = kerosene(T,FAR)
Gli ingressi della funzione sono la temperatura del gas T e il rapportoaria/combustibile FAR (Fuel to Air Ratio). Le uscite della funzione sono: kil rapporto fra calori specifici,cp il calore specifico a pressione costante (unitadi misura [ J
kgK]), cv il calore specifico a volume costante, R la costante dei
gas combusti.
4.3 Struttura del codice C
Il codice C e stato scritto sotto forma di DLL, ovvero tutte le funzioni neces-sarie al modello sono raccolte all’interno di una libreria a collegamento dina-mico che andra poi caricata ed eseguita in fase di compilazione ed esecuzionedella simulazione da un codice chiamante.
Il file a cui si fara riferimento nel seguito e appunto il file sorgente dellalibreria DLL EngineModel.c, che al suo interno contiene le funzioni imple-mentate nel modello e alcuni file header (con estensione .h) che richiamatinella libreria mettono a disposizione delle funzioni e delle definizioni definiteal loro interno.
Le funzioni contenute nella libreria EngineModel.dll sono:
• EngineModel: funzione principale che implementa la dinamica delmotore;

70 CAPITOLO 4. IMPLEMENTAZIONE
• kAIR: riceve in ingresso la temperatura e fornisce in uscita il rapportofra i calori specifici dell’aria;
• cpAIR: riceve in ingresso la temperatura e fornisce in uscita il calorespecifico dell’aria a pressione costante;
• cvAIR: riceve in ingresso la temperatura e fornisce in uscita il calorespecifico dell’aria a volume costante;
• kGAS:riceve in ingresso la temperatura e il rapporto aria/combustibilee fornisce in uscita il rapporto fra i calori specifici dei gas combusti dikerosene e aria con il modello di Guha;
• cpGAS:riceve in ingresso la temperatura e il rapporto aria/combustibilee fornisce in uscita il calore specifico a pressione costante dei gas com-busti di kerosene e aria con il modello di Guha;
• MAPgeneration: genera degli oggetti di tipo gsl interp contenenti lemappe normalizzate per il funzionamento delle turbomacchine;
• GetEngineStates: memorizza il valore degli stati del sistema;
• GetEngineOutput: memorizza in un vettore il valore delle uscitedesiderate;
• EngineModelInit: inizializza i parametri utilizzati dalla funzioneEngineModel ;
• EngineModelStep: fa compiere al sistema un passo di integrazione;
4.3.1 Funzione Principale: EngineModel
La funzione principale, che implementa le relazioni fisiche del modello dimotore e EngineModel. La funzione viene dichiarata nel modo seguente:
ENG_DLL_EXPORT int EngineModel(
double dXdt[ENG_STATES_NUM],
double Y[ENG_OUT],
double X[ENG_STATES_NUM],
double U[ENG_CONTROLS],
gsl_interp * pg2n,
gsl_interp * pbetacn,
gsl_interp * pbetahptn,
gsl_interp * pbetaptn,

4.3. STRUTTURA DEL CODICE C 71
engine_struct *engine_par,
double Pload)
La funzione EngineModel riceve in ingresso:
• il valore dei residui dXdt,
• il valore degli stati X,
• una struttura engine par contenente i parametri caratteristici del mo-tore,
• il valore degli ingressi U (portata di carburante e portata d’aria spilla-ta),
• il vettore Y che raccoglie le uscite del sistema,
• Quattro oggetti di tipo gsl interp che contengono le mappe necessariealle turbomacchine,
• il valore di potenza Pload richiesta dal carico.
La funzione EngineModel restituisce in uscita una variabile di tipo intche rappresenta un codice per la buona esecuzione o meno della funzione. Inrealta le uscite della funzione, coerentemente con la sintassi del linguaggioC, vengono memorizzate nei vettori in ingresso e sono:
• Il vettore dei residui dXdt, contenente le derivate dei tre stati delsistema,
• Il vettore delle uscite Y, contenente i valori delle variabili interessantida esportare a ogni iterazione,
• Il vettore degli stati X.
I residui andranno poi forniti all’integratore insieme al valore degli statiper determinare i valori degli stati al passo successivo. Le uscite saranno inve-ce utili nel caso sia necessario valutarne l’andamento temporale, ad esempioelaborandole in forma grafica.

72 CAPITOLO 4. IMPLEMENTAZIONE
POTENZA CARICO
MAPPE NORMALIZZATE
STATIPARAMETRI
MOTORE
EngineModel
RESIDUIOUTPUT PER
ELABORAZIONE
Figura 4.4: Funzione EngineModel.c : ingressi e uscite.
4.3.2 Funzioni di supporto
All’interno della DLL sono implementate diverse funzioni di supporto:
• kAIR
• cpAIR
• cvAIR
• kGAS
• cpGAS
• MAPgeneration
• GetEngineStates
• GetEngineOutput
• EngineModelInit
• EngineModelStep
Tali funzioni consentono di: determinare le proprieta termodinamichedei fluidi di lavoro (funzioni kAIR,cpAIR,cvAIR,kGAS,cpGAS ), generare lemappe necessarie alla simulazione delle turbomacchine (funzione MAPgene-ration), interfacciarsi con il programma di simulazione o l’eventuale inter-faccia grafica (funzioni GetEngineStates e GetEngineOutput), avviare la si-mulazione (funzione EngineModelInit) o farla procedere nel tempo (funzioneEngineModelStep).

4.4. METODO DI SOLUZIONE E DI INTEGRAZIONE 73
4.4 Metodo di soluzione e di integrazione
Le equazioni che governano il modello sono un sistema di equazioni mi-ste algebrico differenziali implicite (eq: 3.63), ed e quindi necessario tenereconto dell’implicita del problema nella scelta del solutore e dell’integratoretemporale.
Linguaggio Matlab Per quanto riguarda l’implementazione in Matlab,per la scelta dell’integratore si e fatto riferimento alla documentazione delprogramma relativa alle equazioni differenziali ordinarie. Matlab implementauna famiglia di solutori per equazioni differenziali ordinarie: le funzioni ODE(Ordinary Differential Equations). Fra tutte le funzioni ODE, l’unica adattaai problemi impliciti e la funzione ODE15i; essa ha una struttura del tipo :
[TOUT,YOUT] = ODE15I(ODEFUN,TSPAN,Y0,YP0)
Fra le uscite della funzione: TOUT e un vettore temporale che raccoglie gliistanti a cui sono state calcolate le soluzioni YOUT. Analizzando gli ingres-si invece: ODEFUN e la funzione che implementa l’equazione differenzialeimplicita da integrare, TSPAN l’intervallo temporale in cui integrare, Y0 unvettore che raccoglie le condizioni iniziali, e YP0 un vettore che raccoglie lecondizioni iniziali delle derivate.
Le condizioni iniziali devono essere consistenti, ovvero
f(T0, Y 0, Y P0) = 0
La funzione utilizza un metodo di integrazione di ordine variabile a secondadella funzione integranda. E comunque possibile impostare delle opzioni perla tolleranza o il tipo di integratore con il comando OPTIONS.
Linguaggio C Nell’implementazione del modello in linguaggio C, data laflessibilita del codice, si e lasciata liberta di scelta dell’integratore da utiliz-zare. Nella scelta si dovra tenere conto dell’implicita del sistema e dei tempicaratteristici di ognuna delle dinamiche considerate. La funzione Engine-Model fornisce in uscita i tre residui del sistema: i primi due sono relativialle dinamiche meccaniche (n1 ed n2) ed il terzo e relativo alla dinamicatermica(T3). A seconda della specifica applicazione considerata i tempi ca-ratteristici associati ad una o all’altra dinamica varieranno, ad esempio aseconda delle inerzie associate agli alberi per quanto riguarda le dinamichemeccaniche, o a seconda del volume della camera di combustione per quantoriguarda le dinamiche termiche. Si puo comunque affermare che, per applica-zioni su propulsori simili al GE t700, ci si aspetta che la dinamica piu veloce

74 CAPITOLO 4. IMPLEMENTAZIONE
sia quella termica associata alla camera di combustione. La scelta del tempodi integrazione e del metodo di soluzione andra quindi effettuata basandosisul tempo caratteristico di tale dinamica ed eventualmente sui tempi carat-teristici delle altre dinamiche che l’integratore dovra gestire. Ad esempio inun programma di simulazione della dinamica di un elicottero i tempi carat-teristici delle dinamiche del motore andranno messi in relazione con i tempicaratteristici del rotore principale, che a seconda del tipo di modello impie-gato richiedera un passo di integrazione piu o meno breve, che comunque ein relazione con la frequenza di rotazione del rotore.
∆tintegratore < min(τmotore, τrotore)
La scelta del passo di integrazione e in questo caso una decisione che verrapresa durante l’integrazione del modello di motore all’interno del programmadi simulazione.
4.5 Interfaccia grafica
Data la flessibilita dell’implementazione del codice in linguaggio C sotto for-ma di DLL, si e cercato di mettere a punto un’interfaccia grafica che permet-tesse di simulare i vari motori off-line senza interfacciarsi con nessun codicedi meccanica del volo. Tale interfaccia grafica deve essere abbastanza intui-tiva da permettere all’utente di ottenere in breve tempo le informazioni sulfunzionamento del motore, avendo inizialmente personalizzato la simulazionetramite i parametri caratteristici del propulsore che si desidera simulare.
L’interfaccia grafica sara composta da:
• un pannello principale con i componenti del motore,
• una serie di pannelli che riportino gli andamenti temporali delle gran-dezze di interesse durante la simulazione,
• un pannello di selezione dei parametri caratteristici del motore dasimulare.
Per l’implementazione dell’interfaccia grafica si e utilizzato il softwareLAZARUS. Lazarus e un ambiente ad interfaccia integrata rilasciato e svi-luppato dal compilatore a codice sorgente aperto Free Pascal. Il linguaggiocon cui viene sviluppata l’interfaccia grafica e quindi il Pascal orientato aglioggetti.

4.6. DLL - DINAMIC LINK LIBRARY 75
4.6 DLL - Dinamic Link Library
In informatica, una dynamic-link library (libreria a collegamento dinamico) euna libreria software che viene caricata dinamicamente in fase di esecuzione,invece di essere collegata staticamente a un eseguibile in fase di compilazio-ne. Queste librerie sono note con l’acronimo DLL, che e l’estensione del fileche hanno nel sistema operativo Microsoft Windows, o anche con il terminelibrerie condivise (da shared library, usato nella letteratura dei sistemi Unix).Nei sistemi che usano ELF come formato dei file eseguibili, come ad esempioSolaris o Linux, sono anche note come .so, abbreviazione di Shared Object.
La separazione del codice in librerie a collegamento dinamico permettedi suddividere il codice eseguibile in parti concettualmente separate, che ver-ranno caricate solo se effettivamente necessarie. Inoltre, una singola libreria,caricata in memoria, puo essere utilizzata da piu programmi, senza la neces-sita di essere nuovamente caricata, il che permette di risparmiare le risorsedel sistema. Questo metodo di loading on demand consente, inoltre, instal-lazioni parziali di un sistema software, in cui sono effettivamente presentisulla memoria di massa solo le librerie associate alle funzioni che l’utentedesidera utilizzare, come selezionate in fase di installazione: in questo modoad esempio viene caricato il sistema operativo Microsoft Windows. Un altrovantaggio e la possibilita di aggiornare un programma modificando solo leDLL: inserendo una versione diversa della DLL, che contiene ad esempio deibug-fix, tutti i programmi che la usano saranno automaticamente aggiornatisenza bisogno di essere ricompilati. Il principale svantaggio e legato al fattoche una nuova versione di una DLL potrebbe effettuare dei cosiddetti brea-king changes, in modo volontario o inconsapevolmente, a causa di bug nellanuova versione. Un breaking change e una cambiamento critico nel compor-tamento del codice della funzione che la rende non piu compatibile con leconvenzioni in uso (ad esempio, una funzione che prima restituiva NULL incaso di errore nei parametri e che ora restituisce un valore non nullo). Ancorapiu critico il caso in cui un programma di installazione sovrascriva una DLLcon una versione piu vecchia.
Le librerie dinamiche vengono caricate dal sistema operativo all’internodello spazio di memoria del processo che le ha richieste. In questo modol’accesso al codice della DLL avra prestazioni quasi equivalenti a quelle delcodice dell’applicazione stessa o del codice delle librerie statiche (in seguito sivedra perche quasi equivalenti). Per evitare che il codice dell’applicazione equello della DLL occupino la stessa posizione in memoria, il linker dovra pre-disporre la DLL per la rilocazione. In pratica, il sistema operativo determinaun’area di memoria disponibile e rimappa ogni riferimento alla memoria con-tenuto nel codice della DLL. Siccome quest’operazione richiede tempo, ogni

76 CAPITOLO 4. IMPLEMENTAZIONE
DLL dispone di un proprio indirizzo di base ideale: la rilocazione sara ne-cessaria solo se a questo indirizzo predeterminato e gia stata mappata unaprecedente DLL.
4.7 GSL - Gnu Scientific Libraries
Durante l’implementazione in linguaggio C si e fatto ricorso alle librerie open-source GSL (Gnu Scientific Libraries), che permettono di utilizzare funzionidi calcolo numerico gia implementate e validate. Si e fatto riferimento almanuale ([14]) per la documentazione relativa ad ognuna delle librerie utiliz-zate.Le librerie GSL sono librerie software per calcolo numerico molto usatenella matematica applicata e nelle scienze; sono scritte in linguaggio C, masono disponibili wrappers per altri linguaggi di programmazione. Le GSLsono parte del progetto GNU Project e sono distribuite sotto la licensa GNUGeneral Public License.
Le librerie utilizzate in questo lavoro sono:
• Interpolazione: gsl-interp;
• Soluzione di equazioni implicite:
L’inclusione delle librerie considerate viene operata attraverso un fileheader nel nostro file DLL, includendo in modo selettivo le singole librerienecessarie, ad esempio con il comando:
#include <gsl/gsl_interp.h>
Per l’utilizzo delle funzioni relative si rimanda alla documentazione gia citata.

Capitolo 5
Validazione
La validazione del modello termodinamico e stata effettuata confrontando idati ottenuti dalle simulazioni con i dati sperimentali disponibili dal report[5], con cui si e confrontata gran parte della letteratura successiva per lavalidazione dei propri lavori. Per la validazione della termodinamica delmodello, in anello aperto, si e proceduto in due modi:
• confronto degli stati termodinamici in diverse condizioni di regime;
• confronto della risposta del motore a un ingresso di carburante a gra-dino;
I dati sperimentali disponibili non coprono tutte le grandezze caratteristichedel motore e pertanto la validazione e stata possibile solo per le grandezze dicui si e trovato un riferimento.
5.1 Confronto con dati sperimentali a regime
Per potere confrontarsi con i dati sperimentali del motore GE t700, relativiad alcune prove al banco, e necessario simulare le medesime condizioni in cuisi trovava il motore sperimentale. Il confronto e stato possibile solo sui datitermodinamici disponibili, e quindi il riscontro della buona aderenza o menodel modello al comportamento del vero propulsore non e completa, ma vieneeffettuata solo nel sottospazio degli stati termodinamici disponibili.
Per ottenere una risposta a regime del propulsore si e scelto di simulareun funzionamento di 100 secondi, con un passo temporale di ∆t = 0.1 s, cosıda essere sicuri che tutti transitori associati alle dinamiche fossero terminatie che gli stati avessero ormai raggiunto stabilmente il loro valore a regime.
Si e scelto di confrontare i dati sperimentali disponibili e quelli forniti daidue modelli messi a punto in Matlab: il modello γ e il modello ISO.
77

78 CAPITOLO 5. VALIDAZIONE
L’errore percentuale del generico stato termodinamico x ottenuto dallesimulazioni, e definito come:
err% = |x− xx| (5.1)
dove x e il valore sperimentale dello stato termodinamico considerato.Di seguito si riportano le tabelle relative agli errori a regime dei due
modelli per i casi di trim provati nel report [5].
Grandezza Valore sperimentale err% γ err% ISOT1 286 [K] 0.00 0.00T21 570 [K] 3.91 9.48T4 876 [K] 2.28 13.77g21 2.34 [kg/s] 4.33 23.17p1 97702 [Pa] 0.00 0.00p21 779824 [Pa] 3.78 30.14p5 99494 [Pa] 4.15 1.80n1 37861 [RPM] 2.58 13.54
Tabella 5.1: Errori percentuali dei due modelli rispetto al caso 2 di trimsperimentale.
Si noti come gli errori relativi agli stati termodinamici T1 e p1 sianosempre nulli, in quanto in condizioni di velocita di volo nulla, coincidonocon le condizioni dell’aria esterna e quindi con le condizioni al contorno chesi sono imposte per il confronto con i dati sperimentali.
L’errore piu marcato e quello riscontrato nella pressione di scarico deigas combusti, all’uscita della turbina di potenza. Tale errore, in percentualeanche molto elevato (ad esempio nel caso del test case 6 raggiunge ancheil50%), e paragonabile in modulo con gli errori commessi nel valutare le altrepressioni, ma poiche la pressione p5 e prossima alla pressione atmosferica,l’errore percentuale risulta molto piu marcato rispetto a quello che si ha adesempio nella valutazione di p21, che e di un ordine di grandezza piu elevato.E possibile ridurre l’errore su p5 modificando il valore dei rendimenti isoen-tropici delle turbomacchine. Si e scelto comunque di mantenere i rendimentiai seguenti valori:
• ηC = 0.96
• ηHPT = 0.96
• ηPT = 0.86

5.2. VALIDAZIONE DINAMICA: RISPOSTA AD UN GRADINO DI PORTATA DI COMBUSTIBILE79
• ηCC = 0.98
perche questi sono i valori riportati piu spesso in letteratura per il motoreGE t700.
Gli errori commessi nelle simulazioni sono riportate nelle tabelle 5.1, 5.1,5.1, 5.1, 5.1.
Grandezza Valore sperimentale err% γ err% ISOT1 282 [K] 0.00 0.00T21 600 [K] 1.09 2.42T4 903 [K] 1.56 3.59g21 2.79 [kg/s] 2.94 0.59p1 97633 [Pa] 0.00 0.00p21 958405 [Pa] 0.28 0.79p5 99494 [Pa] 1.78 27.69n1 39201 [RPM] 0.73 0.15
Tabella 5.2: Errori percentuali dei due modelli rispetto al caso 3 di trimsperimentale.
Grandezza Valore sperimentale err% γ err% ISOT1 282 [K] 0.00 0.00T21 626 [K] 0.70 1.04T4 961 [K] 1.11 1.56g21 3.13 [kg/s] 2.12 4.29p1 97150 [Pa] 0.00 0.00p21 1110785 [Pa] 0.98 5.53p5 1100667 [Pa] 3.01 27.07n1 40408 [RPM] 0.41 1.17
Tabella 5.3: Errori percentuali dei due modelli rispetto al caso 4 di trimsperimentale.
5.2 Validazione dinamica: risposta ad un gra-
dino di portata di combustibile
La grandezza che rappresenta l’ingresso principale del sistema, attraverso cuisi puo controllare il regime di rotazione del motore, e l’afflusso di carburan-te gb: una validazione dinamica puo essere effettuata rilevando la risposta
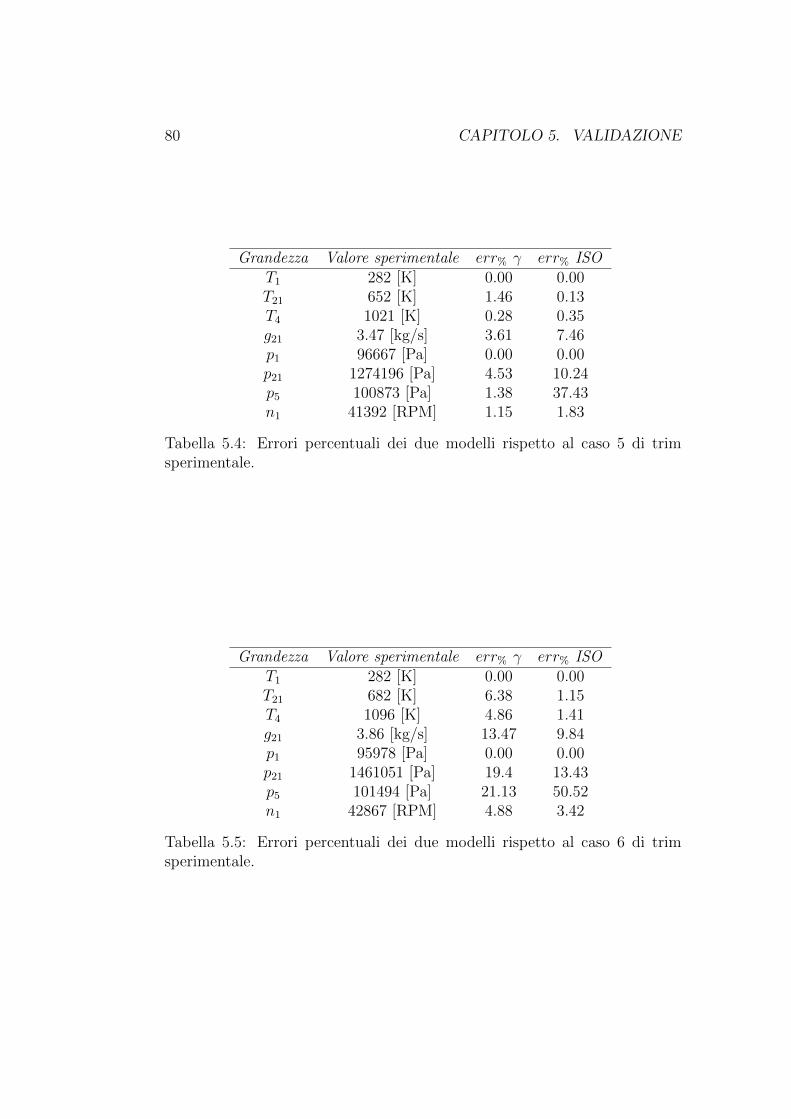
80 CAPITOLO 5. VALIDAZIONE
Grandezza Valore sperimentale err% γ err% ISOT1 282 [K] 0.00 0.00T21 652 [K] 1.46 0.13T4 1021 [K] 0.28 0.35g21 3.47 [kg/s] 3.61 7.46p1 96667 [Pa] 0.00 0.00p21 1274196 [Pa] 4.53 10.24p5 100873 [Pa] 1.38 37.43n1 41392 [RPM] 1.15 1.83
Tabella 5.4: Errori percentuali dei due modelli rispetto al caso 5 di trimsperimentale.
Grandezza Valore sperimentale err% γ err% ISOT1 282 [K] 0.00 0.00T21 682 [K] 6.38 1.15T4 1096 [K] 4.86 1.41g21 3.86 [kg/s] 13.47 9.84p1 95978 [Pa] 0.00 0.00p21 1461051 [Pa] 19.4 13.43p5 101494 [Pa] 21.13 50.52n1 42867 [RPM] 4.88 3.42
Tabella 5.5: Errori percentuali dei due modelli rispetto al caso 6 di trimsperimentale.

5.2. VALIDAZIONE DINAMICA: RISPOSTA AD UN GRADINO DI PORTATA DI COMBUSTIBILE81
del sistema a una perturbazione di questo ingresso. Nel report NASA [5],la validazione dinamica del modello di motore in anello aperto viene effet-tuata confrontando i dati ottenuti dalla risposta ad un gradino di portatadi combustibile del modello semplificato con quella di un simulatore ad altafedelta proprietario del produttore del propulsore. Essendo i dati del reportNASA disponibili solo in formato grafico, si e proceduto dapprima digitaliz-zando i grafici e poi elaborandoli per ottenere dei vettori che sono poi staticonfrontati con i risultati ottenuti dalla simulazione.
La simulazione e stata effettuata a parita di condizioni iniziali, di tempi edi passo di integrazione. Si riportano di seguito le condizioni di simulazione:
• durata temporale t = 5s;
• passo di integrazione ∆t = 14 ms;
• afflusso di carburante iniziale gbiniziale= 400 lb /h = 0.050 399 16 kg s−1;
• afflusso di carburante finale gbstep = 775 lb /h = 0.097 648 37 kg s−1;
• momento di applicazione del gradino di afflusso di carburante t = 0.5s;
Le condizioni iniziali da cui si e fatta partire la simulazione sono state:
Temperatura Valore [k]T1 288.15T21 633T3 1171T2 633T4 900T5 730
Tabella 5.6: Condizioni iniziali di temperatura nelle varie sezioni del motoreprima dell’ingresso a scalino di portata di combustibile.
L’andamento dell’ingresso a gradino e visibile in figura 5.1, mentre ilconfronto della risposta e riportato nelle figure 5.2, 5.4,5.5, 5.3.
Si noti la buona riproduzione del comportamento della temperatura diuscita dalla camera di combustione (figura 5.4), che e uno dei tre stati del si-stema. La buona riproduzione della dinamica del componente indica una cor-retta modellazione, che riesce a catturare, nonostante la relativa semplicita,le dinamiche tipiche con un errore modesto.
Nelle altre figure e possibile notare come lo scostamento dei valori siapiu marcato, sebbene le forme delle risposte siano riprodotte abbastanza

82 CAPITOLO 5. VALIDAZIONE
Portata Valore [kgs
]g21 2.882g2 2.882g3 2.882g4 2.932g5 2.932gcool 0gb 0.05039916
Tabella 5.7: Condizioni iniziali delle portate prima dell’ingresso a scalino diportata di combustibile.
Pressione Valore [Pa]p1 101325p21 1036000p2 1036000p3 1021000p4 331800p5 126900
Tabella 5.8: Condizioni iniziali delle pressioni prima dell’ingresso a scalinodi portata di combustibile.

5.2. VALIDAZIONE DINAMICA: RISPOSTA AD UN GRADINO DI PORTATA DI COMBUSTIBILE83
0 1 2 3 4 50.05
0.055
0.06
0.065
0.07
0.075
0.08
0.085
0.09
0.095
0.1
Time [s]
Mas
s flo
w r
ate
[kg/
s]FUEL FLOW TIME HISTORY
FUEL FLOW
Figura 5.1: Andamento dell’ingresso di portata di combustibile a gradino.
fedelmente. Per ottenere delle risposte ancora piu vicine ai dati sperimentalisarebbe possibile ottimizzare i rendimenti delle turbomacchine, ma in questafase del lavoro si e preferito mantenere i valori costanti e pari a quelli riportatiin letteratura per il motore GE t700.

84 CAPITOLO 5. VALIDAZIONE
0 1 2 3 4 53.9
3.95
4
4.05
4.1
4.15
4.2
4.25
4.3
4.35x 10
4
Time [s]
Ang
ular
vel
ocity
[RP
M]
HPT & COMPRESSOR SPOOL SPEED − n1
NASAISO model
Figura 5.2: Risposta ad un ingresso a gradino di portata di combustibile:confronto del regime di rotazione n1 con i dati del report Ballin - 1988.
0 1 2 3 4 50.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7x 10
6
Time [s]
Pre
ssur
e [P
a]
COMPRESSOR OUTLET PRESSURE − P21
NASAISO model
Figura 5.3: Risposta ad un ingresso a gradino di portata di combustibile:confronto della pressione all’uscita dal compressore p21 con i dati del reportBallin - 1988.

5.2. VALIDAZIONE DINAMICA: RISPOSTA AD UN GRADINO DI PORTATA DI COMBUSTIBILE85
0 1 2 3 4 51150
1200
1250
1300
1350
1400
1450
1500
1550
1600
Time [s]
Tem
pera
ture
[K]
T3: COMBUSTOR OUTLET TEMPERATURE
NASAISO model
Figura 5.4: Risposta ad un ingresso a gradino di portata di combustibile:confronto dellla temperatura T3 in uscita dalla camera di combustione con idati del report Ballin - 1988.
0 1 2 3 4 5850
900
950
1000
1050
1100
1150
1200
1250
Time [s]
Tem
pera
ture
[K]
T4: HIGH PRESSURE TURBINE OUTLET TEMPERATURE
NASAISO model
Figura 5.5: Risposta ad un ingresso a gradino di portata di combustibile:confronto dellla temperatura T4 in uscita dalla turbina di alta pressione coni dati del report Ballin - 1988.

86 CAPITOLO 5. VALIDAZIONE

Capitolo 6
Controllore automatico delpropulsore
6.1 Architettura e logica di controllo
Il motore a turbina per elicotteri e generalmente regolato da un controlloreautomatico, che ne garantisca la funzionalita entro dei limiti di sicurezza. Isistemi di controllo moderni sono di tipo digitale, senza possibilita di passarein modalita manuale: essi prendono il nome di FADEC (Full AuthorityDigital Engine Control) proprio perche il controllo del motore e totalmenteautomatico. Il FADEC a sua volta si compone di due componenti principali:ECS e FCU.
Il sistema di controllo del motore ECS (Engine Control System) ha ilcompito di regolare la potenza del motore in funzione delle necessita operativedell’elicottero. Al variare delle condizioni operative della macchina esso deve:
• regolare la potenza erogata;
• gestire la variazione di flusso di combustibile;
• limitare i regimi di rotazione;
• consentire avviamento e spegnimento;
L’ FCU (Fuel Control Unit) gestisce l’afflusso di carburante al motore esu comando dell’ECS trasforma il segnale elettrico del controllore in flussodi carburante attraverso una pompa elettrica.
La figura 6.1 mostra l’architettura del sistema di controllo FADEC nellasua struttura piu generale. Il sistema elabora diversi tipi di informazioni:
87
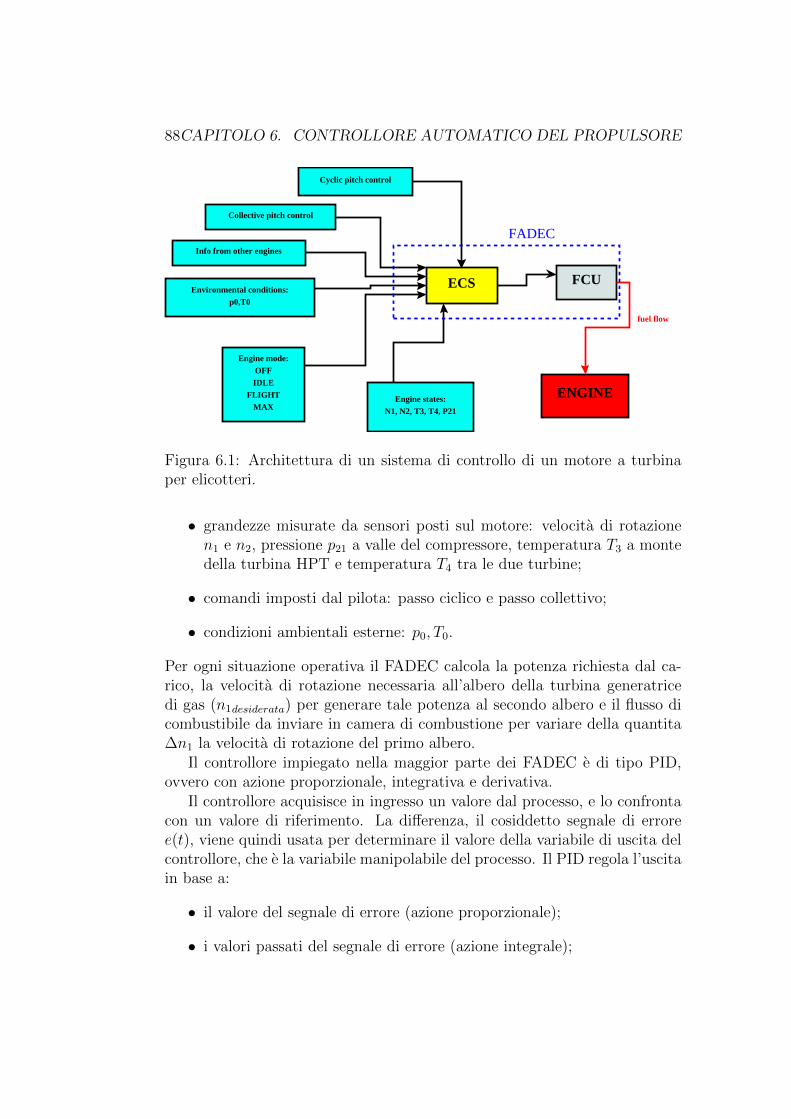
88CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
ECS FCUEnvironmental conditions:
p0,T0
Info from other engines
Collective pitch control
Cyclic pitch control
Engine states:N1, N2, T3, T4, P21
Engine mode:OFFIDLE
FLIGHTMAX
ENGINE
fuel flow
FADEC
Figura 6.1: Architettura di un sistema di controllo di un motore a turbinaper elicotteri.
• grandezze misurate da sensori posti sul motore: velocita di rotazionen1 e n2, pressione p21 a valle del compressore, temperatura T3 a montedella turbina HPT e temperatura T4 tra le due turbine;
• comandi imposti dal pilota: passo ciclico e passo collettivo;
• condizioni ambientali esterne: p0, T0.
Per ogni situazione operativa il FADEC calcola la potenza richiesta dal ca-rico, la velocita di rotazione necessaria all’albero della turbina generatricedi gas (n1desiderata) per generare tale potenza al secondo albero e il flusso dicombustibile da inviare in camera di combustione per variare della quantita∆n1 la velocita di rotazione del primo albero.
Il controllore impiegato nella maggior parte dei FADEC e di tipo PID,ovvero con azione proporzionale, integrativa e derivativa.
Il controllore acquisisce in ingresso un valore dal processo, e lo confrontacon un valore di riferimento. La differenza, il cosiddetto segnale di erroree(t), viene quindi usata per determinare il valore della variabile di uscita delcontrollore, che e la variabile manipolabile del processo. Il PID regola l’uscitain base a:
• il valore del segnale di errore (azione proporzionale);
• i valori passati del segnale di errore (azione integrale);

6.1. ARCHITETTURA E LOGICA DI CONTROLLO 89
TIPO KP KI KD
P 0.5KU
PI 0.45KU 0.54KU
TU
PID 0.6KU 0.9KU
TU0.075KUTU
Tabella 6.1: Taratura dei guadagni con il metodo di Ziegler e Nichols.
• quanto velocemente il segnale di errore varia (azione derivativa).
Chiamando u il generico vettore di controllo, esso viene fornito in uscitadal regolatore PID come:
u(t) =kiTi
∫u(t)dt+ kPu(t) + kdTd
du(t)
dt(6.1)
Oppure, chiamando KI = kiTi
, KD = kdTd, nella piu comune forma:
u(t) = KI
∫u(t)dt+KPu(t) +KD
du(t)
dt(6.2)
dove le costanti KI , KD, KP sono i guadagni dell’azione integrale, deriva-tiva e proporzionale; l’equazione 6.2 puo contenere tutti i tre termini a destrao solo alcuni di essi a seconda del tipo di controllore che si vuole implementare(si veda a riguardo il riferimento [15]).
La taratura dei guadagni puo avvenire attraverso il secondo metodo diZiegler e Nichols ( spiegata nei riferimenti [15, 16]):
1. Si utilizza in primo luogo un controllo solo proporzionale, ovvero conKP 6= 0, KI = KD = 0.
2. Si aumenta il guadagno KP finche nel sistema non si instaurano oscil-lazioni sostenute, che cioe non spariscono dopo un transitorio: questae una misura dell’effetto dei ritardi e della dinamica del processo.
3. Il valore minimo di KP che provoca le oscillazioni sostenute del sistemaviene denominato guadagno critico KU .
4. Il periodo delle oscillazioni sostenute del sistema e il periodo critico TU .
5. Noti il periodo critico e il guadagno critico e possibile determinare ilvalore dei guadagni attraverso la tabella 6.1.
Per avere un’idea dell’ordine di grandezza del guadagno dell’azione pro-porzionale si e messo in relazione il massimo valore dell’errore, che si avrebbe

90CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
Collective Pitch Control
(N2-N2des)
LOOK UP TABLE
LOOK UP TABLE
N1des
deltaN1
PID controllerFUEL FLOW
Figura 6.2: Logica di controllo del regolatore PID implementato all’internodel FADEC.
quando il secondo albero fosse fermo mentre la velocita desiderata fosse quellanominale, e il massimo valore della portata di combustibile. L’errore massimosul regime n2 risulta:
errMAX = n2des − n2 = n2nom − 0 = n2nom (6.3)
La determinazione del guadagno KP puo avvenire come:
KPiniziale=gbMAX
n2MAX
(6.4)
Nel caso del motore per aeromobili, la variabile manipolabile e la portatadi combustibile diretta in camera di combustione (gb o portata di combu-stibile), mentre l’errore viene calcolato sul regime di rotazione dell’albero dipotenza, la 6.2 va quindi valutata assegnando:
u(t) = gb(t) (6.5)
e(t) = n2(t)− n2ref (6.6)
Dove n2ref e il valore del regime di rotazione da mantenere per la determinatacondizione di volo. Ovviamente per raggiungere il valore di n2ref agendo sulflusso di combustibile il motore reagira accelerando n1 e poi trasferendo ilmoto al secondo albero, l’azione e quindi indiretta. E possibile implementaredelle tabelle (look up table) che dato il valore di ∆n2 e di comando del passociclico, forniscano il valore di n1 da far raggiungere al motore.
La logica di controllo del PID implementato all’interno di un FADEC inrealta tiene anche conto dei comandi di passo ciclico e passo collettivo che ilpilota applica al velivolo, aggiornando il valore di n1ref da inseguire in base aquesti dati. La logica di controllo quı descritta, implementata in un genericoFADEC ha lo schema riportato in figura 6.2.
6.1.1 Limiti di impiego del motore
Come detto il FADEC deve regolare la portata di combustibile gb cosı damantenere il funzionamento del motore all’interno dei suoi limiti operativi.

6.2. IMPLEMENTAZIONE 91
Le prestazioni che vengono richieste al motore dal pilota o dai sistemi di ge-stione del volo devono essere compatibili con numerosi vincoli, sia del velivolo(e delle parti che lo compongono: sistema di trasmissione, rotore, ecc..) chedel motore stesso. Il sistema di controllo deve assicurare che l’utilizzo delmotore avvenga in ogni condizione nel rispetto di questi limiti, il FADECdeve infatti:
• garantire che il regime di rotazione n2 si mantenga in prossimita delvalore nominale in tutte le condizioni operative;
• limitare il regime di rotazione n1 sia inferiormente (per non avere tropporitardo nella successiva accelerazione) che superiormente (overspeed :regimi troppo elevati potrebbero portare i componenti soggetti allaforza centrifuga a superare i propri limiti meccanici);
• garantire la composizione ottimale della miscela aria/combustibile siain accelerazione (rischio di surge: fiammate che sottopongono i com-ponenti meccanici a temperature troppo elevate), che in decelerazione(rischio di flame out : spegnimento della fiamma);
• limitare la potenza PPT erogata dal propulsore, per non sottoporre adeccessive sollecitazioni le componenti a valle del motore;
• limitare la coppia del motore per non portare a rottura la trasmissione;
• limitare la temperatura di ingresso in turbina per non sottoporre lepalette della turbina a un eccessivo stress termico.
6.2 Implementazione
Come effettuato per la parte termodinamica, l’implementazione del control-lore e avvenuta prima in linguaggio Matlab, e successivamente in linguaggioC, sfruttando la facilita di scrittura ed elaborazione dei dati di Matlab.
Il controllore del propulsore e, dal punto di vista dell’implementazione,assimilabile ad un sistema che, noti i parametri del sistema-motore (i suoistati termodinamici) e noti gli ingressi (ad esempio un target di potenza dafornire al carico o un comando di passo ciclico del pilota), genera l’ingressodi carburante al motore (si veda a riguardo la figura 6.3). L’unica differenzafra l’implementazione del motore senza controllore e l’implementazione delmotore controllato e quindi la presenza di un sistema (implementato attra-verso una funzione) che varia il flusso di carburante invece di assegnargli unastoria temporale come veniva fatto ad esempio con la funzione FUELflow.m

92CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
CONTROLLORE MOTORE- CARICOY_des Err YU
Figura 6.3: Sistema motore-controllore in anello chiuso.
nel modello ISO. Ovviamente la presenza di un sistema dinamico come il con-trollore, modifichera la risposta del sistema complessivo, composto da motoree controllore.
6.2.1 Implementazione in linguaggio Matlab
Non dovendo il codice scritto in linguaggio Matlab interfacciarsi con alcunsimulatore di meccanica del volo, il controllore sviluppato per il modello ISOnon ha a disposizione le grandezze tipiche con cui un FADEC regola tipi-camente il suo funzionamento: i comandi di passo ciclico e passo collettivoforniti dal pilota. Si e quindi implementato un controllore di tipo PID, do-ve l’obiettivo che viene richiesto e quello di mantenere il regime di rotazionedell’albero di potenza in prossimita del regime nominale. In una implementa-zione all’interno di un simulatore sarebbe naturalmente necessario elaborarei comandi di passo ciclico e passo collettivo per poi gestire l’afflusso di car-burante in modo che la potenza dei propulsori sia tale da mantenere ad ogniistante il rotore in rotazione al regime nominale.
Il controllore in Matlab e una funzione del tipo
[gb]=FADEC(Parametri)
che regola il flusso di combustibile da inviare al motore in base al valore cheassumono alcune variabili interessanti per il controllo. Queste variabili con-sentono al controllore di valutare lo stato in cui si trova ad operare il motore,e permettono di decidere la portata di carburante da inviare in camera dicombustione. E richiesto quindi all’utente interessato all’implementazionedi un motore in anello chiuso, di fornire non soltanto quei parametri uti-li alla simulazione della parte termodinamica del motore, ma anche alcunilimiti meccanici o termici del sistema da simulare, che saranno necessari aimpostare la logica di controllo del FADEC. Ad esempio per l’applicazionein un simulatore di meccanica del volo di un elicottero, bisognera specificareal controllore:

6.2. IMPLEMENTAZIONE 93
PID
STATI:n1, n2, T3
RIFERIMENTO:n2_ref
PASSO TEMPORALE:dt
VINCOLI:gb_max - gb_minn1_max -n1_minn2_max - n2_min
T3_maxTorque_maxPower_max
FUEL FLOW:gb
Figura 6.4: Struttura del controllore FADEC nell’implementazione inlinguaggio Matlab.
• la massima potenza (PPTMAX) (o coppia (CMAX)) trasferibile alla tra-
smissione,
• il minimo (n2MIN) e il massimo regime (n2MAX
) di rotazione sopportatodal carico,
• il minimo (n1MIN) e il massimo (n1MAX
) regime di rotazione ammessoper l’albero della turbina generatrice di gas: per avere un ritardo ac-cettabile nella successiva accelerazione del motore il primo, e per nonsforare i limiti strutturali con le forze centrifughe il secondo,
• il minimo (gbMIN) e il massimo (gbMAX
) afflusso di combustibile ammessoin camera di combustione,
• la massima temperatura T3 accettabile in camera di combustione.
Nell’implementazione la taratura dei guadagni del regolatore PID e stataeffettuata attraverso il secondo metodo di Ziegler e Nichols, andando poia modificare leggermente i valori forniti dalla tabella 6.1 per privilegiare laprontezza della risposta o l’annullamento piu rapido possibile dell’errore din2.

94CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
6.3 Simulazioni del motore in anello chiuso
Si riportano gli andamenti degli stati termodinamici di alcune simulazionieffettuate con il modello ISO di motore controllato da un PID in ambienteMatlab. Al propulsore e collegato un carico, la cui potenza e descritta dalla3.57. L’obiettivo del controllore e quello di mantenere il carico in rotazionea una velocita prossima a quella del riferimento n2REF
.
6.3.1 Simulazione 1 - controllore proporzionale
I parametri caratteristici della simulazione 1 sono:
• tempo di simulazione: 5 secondi;
• passo di integrazione: 0.01 secondi;
• tipo di controllore: Proporzionale;
• guadagno: KP = 4.65 10−3;
• target di velocita di rotazione: n2 = n2nominale= 20900[RPM ];
La simulazione e stata effettuata accoppiando il modello di carico chesimula in modo semplificato il rotore dell’elicottero Sikorsky UH-60 ad unsolo motore. Tale tipo di utilizzo del motore e simile a quello che si avrebbedurante un guasto di uno dei due propulsori, situazione OEI (One EngineInoperative), in cui la potenza necessaria alla macchina deve essere fornitainteramente da una sola delle due unita propulsive. Tale condizione e moltogravosa per il motore e ci si aspetta che il consumo sia superiore a quello chesi ha durante il funzionamento normale.
Le condizioni iniziali della simulazione 1 sono riportati nella tabella 6.3.1.
Osservazioni L’aggiunta del controllore e della sua dinamica ha richiestonell’implementazione in Matlab con la funzione integratrice ode15i di ridurreil passo di integrazione a ∆t = 0.01 s per non avere problemi di convergenza.Tale passo di integrazione e dell’ordine di grandezza di quello richiesto dalladinamica del rotore in un simulatore che implementi un modello di rotorecon grandezze mediate sul giro, ma e inferiore di un ordine di grandezza diquello richiesto dalla sola dinamica termica-meccanica del motore in anelloaperto.

6.3. SIMULAZIONI DEL MOTORE IN ANELLO CHIUSO 95
Variabile Valore Unita di misuran1 44700 π
30rad/s
n2 20000 π30
rad/sp1 95978 PaT1 281.778 Kp21 95978 PaT21 281.778 Kp2 95978 PaT2 281.778 Kp3 95978 PaT3 281.778 K
T3 0 K/sp4 98978 PaT4 281.778 Kp5 95978 PaT5 281.778 KPc 0 WPhpt 0 WPpt 0 WPf pt 0 W
Pf hpt 0 W
g21 0 Kg/sg2 0 Kg/sg3 0 Kg/sg4 0 Kg/sτCC 0 sn1 0 rad s−2
n2 0 rads−2
T3 0 K/s
Tabella 6.2: Condizioni iniziali della simulazione 1 di motore controllato inanello chiuso da controllore proporzionale.

96CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
0 1 2 3 4 51.9
2
2.1x 10
4
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
NOMINAL
0 1 2 3 4 54.3
4.4
4.5x 10
4
spee
d [R
PM
]
N1: GAS TURBINE SHAFT SPEED
n1n1
NOMINAL
0 1 2 3 4 50
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
FUEL FLOW TIME HISTORY
gB
Figura 6.5: Simulazione 1 con controllore P. Velocita di rotazione dei duealberi e variabile di controllo gb.
0 1 2 3 4 51.96
1.98
2
2.02
2.04
2.06
2.08
2.1x 10
4
time [s]
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
REFERENCE
Figura 6.6: Simulazione 1 con controllore Proporzionale.Velocita angolaredell’albero della turbina di potenza. Confronto con il riferimento da inseguire.

6.3. SIMULAZIONI DEL MOTORE IN ANELLO CHIUSO 97
Utilizzo di un controllore proporzionale L’utilizzo di un controlloresolo proporzionale (di tipo P) con un guadagno adeguato fornisce prestazionipiuttosto soddisfacenti. L’andamento della variabile di controllo nella simu-lazione 1 mostra una sovraelongazione di lieve entita e si attesta sul valoredi regime dopo circa 0.18 s. La variabile da controllare raggiunge dopo circa0.15 s il valore del riferimento, mentre la velocita dell’albero della turbinageneratrice di gas (n1), si attesta su un valore di poco inferiore al valorenominale. Il non annullarsi dell’errore a regime e coerente con il tipo di con-trollore scelto: un controllore solo proporzionale non e capace di annullarel’errore a regime, ma e pronto nell’inseguire il riferimento. Il consumo di car-burante per mantenere in rotazione il rotore con un solo propulsore e, comeci si aspetta, e superiore a quello che si avrebbe in condizioni nominali. Ilsurplus di portata di carburante richiesto rispetto alle condizioni nominali edi circa il 33%.
6.3.2 Simulazione 1 - controllore PI
La simulazione 3 riprende esattamente i dati iniziali della simulazione 1, macon l’impiego di un controllore di tipo PI: proporzionale e integrativo. Talecontrollore permette l’annullamento dell’errore a regime. Per la taratura deiguadagni si e partito dai valori ottenuti dalla regola di Ziegler e Nichols, va-riando poi il guadagno della componente integrativa perche il valore calcolatocon la regola della tabella 6.1 provocava oscillazioni sostenute.
Si noti (figura 6.7) come il controllore con azione proporzionale e inte-grativa riesca ad annullare l’errore a regime, a differenza del controllore soloproporzionale. L’azione integrativa provoca un ritardo nell’inseguimento delriferimento: la velocita di rotazione n2 raggiunge il suo valore target dopocirca 0.4 s (figura 6.8).
In figura 6.9 e riportato l’andamento delle due velocita di rotazione e dellavariabile di controllo gb, che rappresenta l’uscita del controllore.
6.3.3 Simulazione 1 - controllore PID
La simulazione 1 condotta utilizzando un controllore PID, che impieghi tuttii tre contributi proporzionale, integrativo e derivativo, fornisce come risultatile storie temporali visibili nelle figure 6.10, 6.11 e 6.12.
E possibile notare (figura 6.11) come gia dopo 0.25 s la velocita n2 siagiunta gia in prossimita del riferimento.
In figura 6.12 si apprezza come nei primi istanti della simulazione la varia-bile di controllo cambi repentinamente, a causa dell’azione derivativa. Tali

98CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
0 1 2 3 4 51.96
1.98
2
2.02
2.04
2.06
2.08
2.1
2.12
2.14
2.16x 10
4
time [s]
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
REFERENCE
Figura 6.7: Inseguimento del riferimento di velocita di rotazione costante concontrollore PI.
0 0.2 0.4 0.6 0.8 1
2
2.1
2.2x 10
4
n 2 spe
ed [R
PM
]
0 0.2 0.4 0.6 0.8 14.35
4.4
4.45
4.5x 10
4
n 1 spe
ed [R
PM
]
0 0.2 0.4 0.6 0.8 10
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
Figura 6.8: Simulazione 1 con controllore PI. Andamento dei due sta-ti meccanici e della variabile di controllo durante il primo secondo disimulazione.

6.3. SIMULAZIONI DEL MOTORE IN ANELLO CHIUSO 99
0 1 2 3 4 51.8
2
2.2x 10
4
n 2 spe
ed [R
PM
]
0 1 2 3 4 54.3
4.4
4.5x 10
4
n 1 spe
ed [R
PM
]
0 1 2 3 4 50
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
Figura 6.9: Velocita di rotazione n1, n2 e portata di combustibile gb durantel’inseguimento del riferimento costante n2ref con controllore di tipo PI.
0 1 2 3 4 51.96
1.98
2
2.02
2.04
2.06
2.08
2.1
2.12
2.14
2.16x 10
4
time [s]
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
REFERENCE
Figura 6.10: Simulazione 1 con controllore PID. inseguimento del riferimentosulla velocita di rotazione n2.

100CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
0 1 2 3 4 51.8
2
2.2x 10
4
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
NOMINAL
0 1 2 3 4 54.3
4.4
4.5x 10
4
spee
d [R
PM
]
N1: GAS TURBINE SHAFT SPEED
n1n1
NOMINAL
0 1 2 3 4 50
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
FUEL FLOW TIME HISTORY
gB
Figura 6.11: Simulazione 1 con controllore PID. Velocita di rotazione eportata di combustibile durante la simulazione.
0 0.2 0.4 0.6 0.8 1
2
2.1
2.2x 10
4
n 2 spe
ed [R
PM
]
0 0.2 0.4 0.6 0.8 14.35
4.4
4.45
4.5x 10
4
n 1 spe
ed [R
PM
]
0 0.2 0.4 0.6 0.8 10
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
Figura 6.12: Simulazione 1 con controllore PID. Particolare del primosecondo di simulazione.

6.3. SIMULAZIONI DEL MOTORE IN ANELLO CHIUSO 101
cambiamenti repentini sono possibili solo in via teorica, in quanto un at-tuatore reale (in questo caso il motore elettrico che azioni la pompa delcarburante), ha una sua banda passante e quindi non riuscirebbe a fornirevariazioni di gb cosı repentine se queste fossero a una frequenza superiore aquella massima della banda dell’attuatore. Nel nostro modello gli attuatorinon sono stati modellati, ma non sarebbe difficile implementare un modelloequivalente della dinamica dell’attuatore, cosı da tenere conto dei ritardi edelle dinamiche associate.
6.3.4 Simulazione 2 - controllore proporzionale
La simulazione 2 prevede un riferimento di velocita di rotazione n2ref chesi attesti su tre valori diversi durante la durata del calcolo. Sia t l’istanteconsiderato:
1. per t <=tfin3
il target e n2ref = 1.1 n2nominal
2. pertfin3< t <=
2tfin3
il target e n2ref = 0.95 n2nominal
3. per2tfin3
< t <= tfin il target e n2ref = 1.1 n2nominal
I parametri caratteristici della simulazione 2 sono:
• tempo di simulazione: 5 secondi;
• passo di integrazione: 0.01 secondi;
• guadagno: KP = 4.65 10−3;
• target: n2 variabile durante la simulazione.
Tale simulazione e in effetti una prova della reattivita del sistema in quan-to il riferimento varia repentinamente e si vuole verificare la capacita di in-seguimento del sistema controllato in anello chiuso. Le condizioni iniziali e iparametri sono gli stessi della simulazione 1, riportati nella tabella 6.3.1.
In figura 6.13 e mostrato l’inseguimento del riferimento da parte del si-stema. Nonostante la repentina variazione del riferimento (a gradino), ilcontrollore proporzionale e rapido nell’inseguirlo: il transitorio dura circa0.2 s. Il limite del controllore di tipo proporzionale e che l’errore a regimenon tende ad annullarsi ma si attesta su un valore costante, in questo casol’errore esaurito il transitorio e sempre minore di 1000 RPM ed e proporzio-nale al modulo del valore di riferimento. Per avere l’annullamento dell’errore

102CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
0 1 2 3 4 51.9
1.95
2
2.05
2.1
2.15
2.2
2.25
2.3
2.35
2.4x 10
4
time [s]
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
REFERENCE
Figura 6.13: Inseguimento del riferimento da parte del sistema motore -controllore in anello chiuso. Simulazione 2. Controllore solo proporzionale.
0 1 2 3 4 51.5
2
2.5x 10
4
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
NOMINAL
0 1 2 3 4 54.2
4.4
4.6x 10
4
spee
d [R
PM
]
N1: GAS TURBINE SHAFT SPEED
n1n1
NOMINAL
0 1 2 3 4 50
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
FUEL FLOW TIME HISTORY
gB
Figura 6.14: Velocita di rotazione dei due alberi e flusso di carburan-te in camera di combustione durante la simulazione 2 di inseguimentodi un riferimento variabile di n2 con motore controllato da un regolatoreproporzionale.

6.3. SIMULAZIONI DEL MOTORE IN ANELLO CHIUSO 103
0 1 2 3 4 5
1.95
2
2.05
2.1
2.15
2.2
2.25
2.3x 10
4
time [s]
spee
d [R
PM
]N2: POWER TURBINE SHAFT SPEED
n2n2
REFERENCE
Figura 6.15: Simulazione 2 con controllore PI. Inseguimento del riferimentovariabile n2REF
.
a regime si dovra impiegare un controllore che implementi anche l’azioneintegrale (di tipo PI).
In figura 6.14 e possibile vedere l’andamento dei due stati meccanici delsistema (n1 ed n2) e la storia della variabile di controllo gb. Si noti come ilcontrollore proporzionale sconti la sua prontezza con una certa oscillazionedella variabile di controllo negli istanti subito successivi alla variazione delriferimento. Tale comportamento e dovuto all’utilizzo di una costante KP
piuttosto elevata calcolata con il secondo metodo di Ziegler e Nichols. Ridu-cendo tale costante e possibile ottenere un controllore meno reattivo che peroeviti al sistema tali oscillazioni. A seconda dell’applicazione sara opportunoprivilegiare la prontezza o la stabilita del controllo, ma in linea generale unsemplice controllore proporzionale ben tarato sembra poter garantire buoneprestazioni.
6.3.5 Simulazione 2 - controllore PI
Similmente a quanto fatto per la simulazione 1, si riportano i risultati dellasimulazione 2 condotta con un controllore di tipo PI con azione proporzionalee integrativo. Le condizioni della simulazione sono invariate rispetto a quelleutilizzate per la simulazione 2 con controllore solo proporzionale.

104CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
0 1 2 3 4 51.5
2
2.5x 10
4
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
NOMINAL
0 1 2 3 4 54.2
4.4
4.6x 10
4
spee
d [R
PM
]
N1: GAS TURBINE SHAFT SPEED
n1n1
NOMINAL
0 1 2 3 4 50
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
FUEL FLOW TIME HISTORY
gB
Figura 6.16: Simulazione 2 con controllore PI. Andamento dei due statimeccanici n1, n2 e della variabile di controllo gb.
In figura 6.15 e possibile notare come il controllore con azione proporzio-nale e integrativa sia meno pronto nell’inseguire il riferimento, ma garantiscal’annullamento dell’errore dopo il transitorio.
In figura 6.16 si vede come le oscillazioni della variabile di controllo gbprovochino un andamento oscillatorio degli stati meccanici del sistema n1 en2. Tali oscillazioni possono essere alleviate variando il guadagno KI dellacomponente derivativa, ma a scapito della prontezza del controllore. In que-sto caso si e preferito mantenere le costanti al valore suggerito dalla tabella6.1.
Si noti come il riferimento di n2 piu elevato (quello del primo terzo deltempo di simulazione) non sia raggiungibile con un solo motore per limiti dipotenza. Esso e in effetti una condizione non fisica, in quanto si chiederebbe alrotore di girare ad un regime troppo elevato. Tale condizione e stata inventatasolo per provare la risposta dinamica del sistema motore-controllore.
6.3.6 Simulazione 2 - controllore PID
Utilizzando un controllore PID, quindi con azione proporzionale, integrativae derivativa, i risultati della simulazione 2 sono quelli mostrati nelle figure

6.3. SIMULAZIONI DEL MOTORE IN ANELLO CHIUSO 105
0 1 2 3 4 5
1.95
2
2.05
2.1
2.15
2.2
2.25
2.3x 10
4
time [s]
spee
d [R
PM
]N2: POWER TURBINE SHAFT SPEED
n2n2
REFERENCE
Figura 6.17: Simulazione 2 con controllore PID. Inseguimento del riferimentovariabile di velocita di rotazione n2.
6.17 e 6.18. I guadagni sono determinati come nell’ultima riga della tabella6.1.
La figura 6.17 mostra una risposta del sistema controllato dal controllorePID molto simile a quella del sistema controllato dal controllore PI, a menodelle sovraelongazioni che nel caso del PID sono meno marcate e di intensitapiu breve. Permangono comunque delle oscillazioni al mutare del valore delriferimento n2REF
, e un certo ritardo di annullamento dell’errore.Tali comportamenti sono sicuramente da imputare ai valori dei guadagni
impiegati, che sono sı in linea con il secondo metodo di Ziegler e Nichols, mapotrebbero non essere i piu adatti per il problema in esame. In questo lavo-ro di tesi si e voluto solo dimostrare come l’architettura PID con guadagnideterminati dal secondo metodo di Ziegler e Nichols sia flessibile e consentadi ottenere buone prestazioni di controllo, senza entrare troppo nello speci-fico della taratura dei guadagni per una specifica applicazione, in quanto ilmodello e nelle sue intenzioni estendibile al maggior numero di applicazio-ni. Delle opportune variazioni dei guadagni sicuramente possono consentireil raggiungimento di ottime prestazioni con un controllore PID e si riman-da quindi l’utente ai riferimenti [15, 16] per tarare opportunamente questiguadagni nelle condizioni in cui si trovasse ad operare.

106CAPITOLO 6. CONTROLLORE AUTOMATICO DEL PROPULSORE
0 1 2 3 4 51.5
2
2.5x 10
4
spee
d [R
PM
]
N2: POWER TURBINE SHAFT SPEED
n2n2
NOMINAL
0 1 2 3 4 54.2
4.4
4.6x 10
4
spee
d [R
PM
]
N1: GAS TURBINE SHAFT SPEED
n1n1
NOMINAL
0 1 2 3 4 50
0.1
0.2
Fue
l Flo
w [K
g/s]
time [s]
FUEL FLOW TIME HISTORY
gB
Figura 6.18: Simulazione 2 con controllore PID. Storia temporale dei duestati meccanici n1 ed n2 e della variabile di contollo gb durante la simulazione.

Capitolo 7
Simulazione di una manovra
7.1 Illustrazione della manovra e software im-
piegati
Al fine di riprodurre l’utilizzo del modello in una condizione operativa in unsimulatore, non avendo ancora a disposizione il codice di meccanica del voloin cui includere il modello scritto in C trattato in questo lavoro, si e procedutosostituendo agli ingressi della simulazione degli andamenti reali provenienteda un caso studiato nell’ufficio flight mechanics della ditta AgustaWestland.
La simulazione riproduce una steep descent, ovvero una discesa ripida eun atterraggio, effettuato con un modello di elicottero reale implementatonel software di simulazione Flightlab R©sviluppato da Advanced RotorcraftTechnology. L’elicottero in questione monta il propulsore Pratt & WhitneyPT6C-67C, i cui parametri caratteristici rintracciabili sul testo [17] sono ri-portati in tabella 7.1. Tale simulazione e realistica e riproduce con grandefedelta i parametri registrati durante un’analoga prova di volo effettuata dalvero. Si e scelto di confrontarsi con un software di simulazione e non con deidati sperimentali provenienti da prove di volo per la maggiore disponibilitadi parametri prodotti dal simulatore rispetto a quelli misurati durante la pro-va di volo. In particolare la portata di combustibile gb, non viene misuratadurante una tipica prova di volo, e poiche essa rappresenta l’ingresso (o lavariabile di controllo) del sistema, era fondamentale avere a disposizione lasua storia temporale. Per questo motivo si e preferito confrontare i parame-tri calcolati dal modello ISO con quelli derivanti dalla simulazione effettuatacon il software FlightLab.
Il modello ISO del motore e stato quindi personalizzato andando a modifi-care il file enginePARAMETERS.m, e specificando i parametri caratteristicidisponibili riportati in tabella 7.1. Per alcuni parametri non disponibili si
107

108 CAPITOLO 7. SIMULAZIONE DI UNA MANOVRA
Configurazione 4A+CPortata d’aria [kg/s] 4.5
Albero FrontaleLunghezza [mm] 1506Larghezza [mm] 571.5
Potenza al decollo [kW] 1142n1nominal
[RPM] 38200n2nominal
[RPM] 21000
Tabella 7.1: Dati del motore P&W PT6C-67C.
e in prima battuta fatto ricorso ai dati del gia citato motore GE t700, inquanto e un propulsore della stessa categoria con una configurazione pocodissimile dal propulsore P&W PT6c-67C, ma e molto piu documentato diquest’ultimo. Successivamente si e cercato di identificare tali parametri daidati disponibili e di tarare meglio il modello.
Il software FlightLab calcola nel corso della simulazione alcune delle va-riabili di interesse del motore. Poiche la simulazione in esame viene condottacon entrambi i motori attivi, il software in questo caso ha registrato le storietemporali dei parametri di entrambi i propulsori. Si e poi scelto di conside-rare i parametri del solo motore 1 e di confrontarli con quelli generati nellemedesime condizioni dal nostro modello.
La simulazione e stata effettuata impiegando lo stesso passo temporale ela stessa durata di quelli della simulazione con software Flightlab. Essi sono:
• Durata simulazione: tfin = 429 s
• Passo temporale: dt = 0.0081 s
In tal modo e stato possibile fornire ad ogni istante al modello ISO glistessi ingressi forniti al modello Flightlab, cosı da confrontare istante peristante le grandezze calcolate dai due modelli di motore.
Le variabili su cui e stato possibile effettuare un confronto, perche calco-late dal software Flightlab, sono:
• velocita di rotazione della turbina generatrice di gas: n1;
• velocita di rotazione della turbina di potenza: n2;
• temperatura dei gas all’uscita dalla turbina generatrice di gas: T4;
• coppia fornita dal motore all’albero della turbina di potenza;
• pressione dei gas in camera di combustione: p3;

7.2. CONFRONTO UTILIZZANDO ALCUNI PARAMETRI DEL MOTORE GE T700109
0 50 100 150 200 250 300 350 400 450
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
time [s]
Nor
mal
ized
Fue
l Flo
w
FlightlabISO
Figura 7.1: Storia temporale della portata di combustibile gb durante lasimulazione effettuata in Flighlab e poi riprodotta con il modello ISO.
La time history dell’ingresso, ovvero la storia temporale dell’afflusso dicombustibile e riportata in figura 7.1, confrontando il vettore provenienteda Flightlab e quello riprodotto nel modello ISO. Essi coincidono. Si noticome questa manovra preveda delle variazioni repentine e di grande entitadell’afflusso di combustibile, risultando un buon banco di prova per valutarela risposta dinamica del nostro modello.
7.2 Confronto utilizzando alcuni parametri del
motore GE t700
Velocita n1 Osservando la figura 7.2 si noti come la dinamica dell’alberodella turbina generatrice di gas sia ben colta dal modello ISO. Gli errori ri-spetto alla simulazione effettuata in Flightlab sono di piccola entita. Talecomportamento evidenzia un’ottima approssimazione della dinamica dell’al-bero della turbina generatrice di gas del motore Pratt & Whitney con i para-metri derivati dal motore GE t700. Si noti anche come il motore si trovi adoperare in tutto il tempo della simulazione al di sotto del regime nominale,in quanto esso deve fornire circa la meta della potenza richiesta dal carico,essendo affiancato dalla seconda unita propulsiva.

110 CAPITOLO 7. SIMULAZIONE DI UNA MANOVRA
0 50 100 150 200 250 300 350 400 4500.7
0.75
0.8
0.85
0.9
0.95
1
time [s]
Nor
mal
ized
spe
ed
N1: GAS TURBINE SHAFT SPEED
n1 FLIGHTLABn1 ISOn1
NOMINAL
Figura 7.2: Confronto fra la velocita di rotazione n1 calcolata dal modelloISO e quella ottenuta dalla simulazione in Flightlab. Si riporta anche il valorenominale per il motore considerato. Parametri incogniti derivati dal motoreGE t700.

7.2. CONFRONTO UTILIZZANDO ALCUNI PARAMETRI DEL MOTORE GE T700111
0 50 100 150 200 250 300 350 400 4500
0.2
0.4
0.6
0.8
1
1.2
1.4
time [s]
Nor
mal
ized
Tem
pera
ture
T4 computed with Flightlab vs T4 computed with iso model
T45FLIGHTLAB
T4ISO
Figura 7.3: Confronto della temperatura T4 dei gas fra le due turbine cal-colata con il modello ISO e il software Flightlab.Parametri incogniti derivatidal motore GE t700.
Temperatura T4 In figura 7.3 e riportato il confronto relativo alla tempe-ratura dei gas fra le due turbine, ottenuto con i parametri di primo tentativoper il motore Pratt & Whitney, derivati dal motore GE t700. L’errore sullatemperatura fra le due turbine e modesto, anche se il modello ISO sovrastimala temperatura in tutta la durata della simulazione
Potenza erogata Si noti come la potenza espressa dal modello, impostan-do i parametri incogniti uguali a quelli del motore GE t700 sia molto superiorea quella calcolata dal software Flightlab (figura 7.4), nonostante la forma delsuo andamento sia analoga. Questo e segno di una buona modellazione, madi una cattiva scelta dei parametri di taratura.
E necessaria quindi una messa a punto di questi parametri se si voglionoridurre gli errori.

112 CAPITOLO 7. SIMULAZIONE DI UNA MANOVRA
0 50 100 150 200 250 300 350 400 4500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
time [s]
Nor
mal
ized
Pow
er
Shaft Power Flightlab vs iso model
PowerFLIGHTLAB
PowerISO
Figura 7.4: Potenza espressa dal modello ISO confrontata con quella espressadal modello FlightLab. Per i parametri incogniti si e fatto ricorso a quellidel motore GE t700.
7.3 Confronto utilizzando parametri identifi-
cati
Per garantire una riproduzione piu accurata del motore Pratt & WhitneyPT6C-67C si e reso necessario tarare i parametri di personalizzazione delmodello per tale motore. Non riuscendo a rintracciare in rete e in letteraturaun maggior numero di parametri di quelli riportati in tabella 7.1, si e resanecessaria un’identificazione a partire dai dati disponibili. Tale problema ecomune alla gran parte dei motori per elicotteri, che raramente sono benedocumentati e i cui parametri caratteristici sono spesso resi disponibili dalproduttore solo ai clienti, con accordi di non divulgazione.
Per quanto riguarda la scelta dei momenti di inerzia dei due alberi dirotazione JHPT e JPT si e deciso di scalare i rispettivi valori in funzione deldiametro del motore. Essendo il momento di inerzia dipendente dal quadratodella distanza dall’asse di rotazione:
J =
∫ρd2(x, y, z) dV
si e pensato di scalarlo in dipendenza della dimensione radiale del motoreelevata alla seconda potenza:

7.3. CONFRONTO UTILIZZANDO PARAMETRI IDENTIFICATI 113
JHPTpt6c = JHPTt700R2pt6c
R2t700
(7.1)
JPTpt6c = JPTt700R2pt6c
R2t700
(7.2)
in cui Rpt6c, Rt700 equivalgono a meta del diametro nominale del motore,grandezza facilmente reperibile in letteratura.
Analogamente, non conoscendo il volume della camera di combustione,ipotizzando che esso sia direttamente proporzionale al volume del motore, sie proceduto scalando il dato proveniente dal solito propulsore GE t700 conil rapporto fra i volumi dei propulsori:
VCCpt6c = VCCt700
Vpt6cVt700
(7.3)
In cui VCC e il volume della camera di combustione e Vpt6c, Vt700 sono ivolumi dei due motori, calcolati dai dati disponibili in letteratura come:
Vmotore = LmotoreD2motore
π
4
E stato impossibile rintracciare in letterature il rapporto di compressionedel compressore e i rapporti di espansione delle turbine. In mancanza di datisi sono ipotizzati dei valori simili a quelli del motore GE t700.
Temperatura T4 In figura 7.5 e riportato il confronto fra la simulazionecondotta in FlightLab e quella condotta con il modello ISO utilizzando i pa-rametri modificati. E possibile notare come l’inseguimento sia buono: la tem-peratura calcolata dal modello ISO si trova nell’intorno dei valori restituitidal software Flightlab durante tutta la durata della simulazione.
Velocita n1 In figura 7.6 e riportato il confronto sulla velocita di rotazionedell’albero della turbina generatrice di gas. Si puo notare come il modelloISO con i parametri modificati riproduca in modo peggiore la dinamica din1 rispetto al modello ISO con i parametri del motore GE t700. Questocomportamento e da imputarsi in larga misura alla scelta dei parametri ef-fettuati per il modello, che evidentemente non e in linea con i valori realidel motore, che risultano impossibili da reperire in letteratura. Per avere unmatch migliore in questa dinamica e quindi necessaria un’ulteriore messa apunto dei parametri. Sebbene gli errori siano maggiori,la forma della rispostae riprodotta comunque fedelmente, come nella simulazione effettuata con iparametri derivati dal motore GE t700.
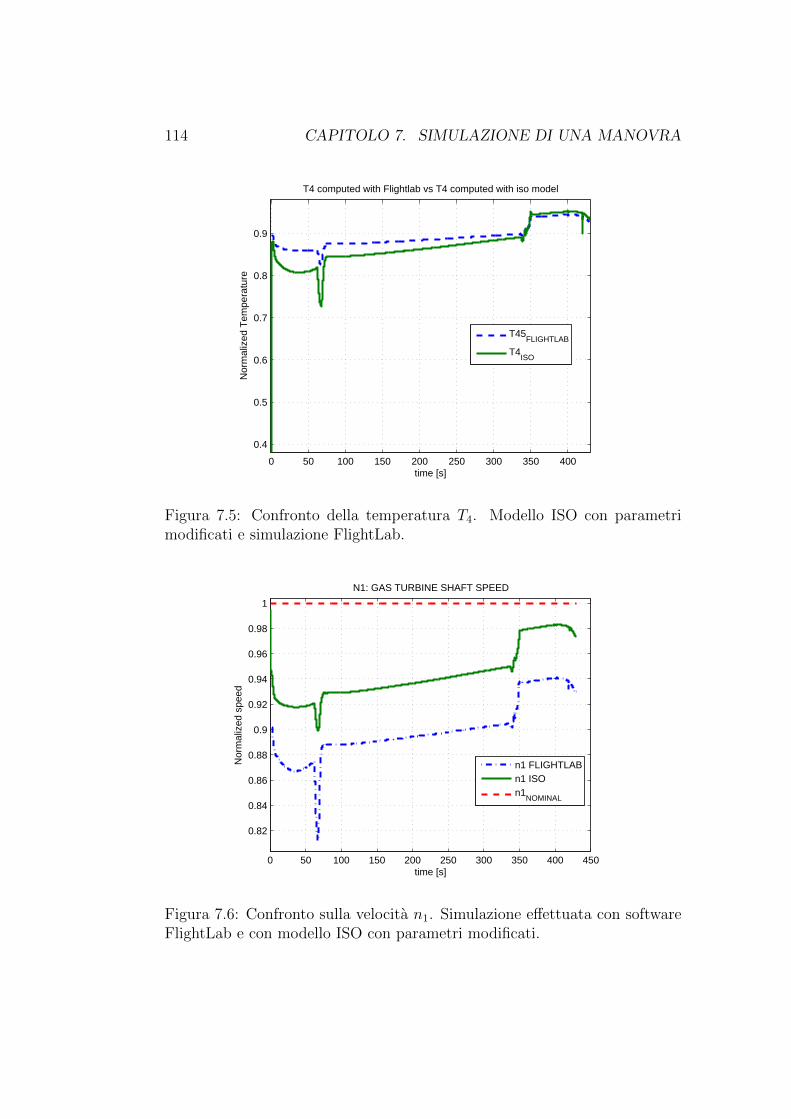
114 CAPITOLO 7. SIMULAZIONE DI UNA MANOVRA
0 50 100 150 200 250 300 350 400
0.4
0.5
0.6
0.7
0.8
0.9
time [s]
Nor
mal
ized
Tem
pera
ture
T4 computed with Flightlab vs T4 computed with iso model
T45FLIGHTLAB
T4ISO
Figura 7.5: Confronto della temperatura T4. Modello ISO con parametrimodificati e simulazione FlightLab.
0 50 100 150 200 250 300 350 400 450
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
time [s]
Nor
mal
ized
spe
ed
N1: GAS TURBINE SHAFT SPEED
n1 FLIGHTLABn1 ISOn1
NOMINAL
Figura 7.6: Confronto sulla velocita n1. Simulazione effettuata con softwareFlightLab e con modello ISO con parametri modificati.
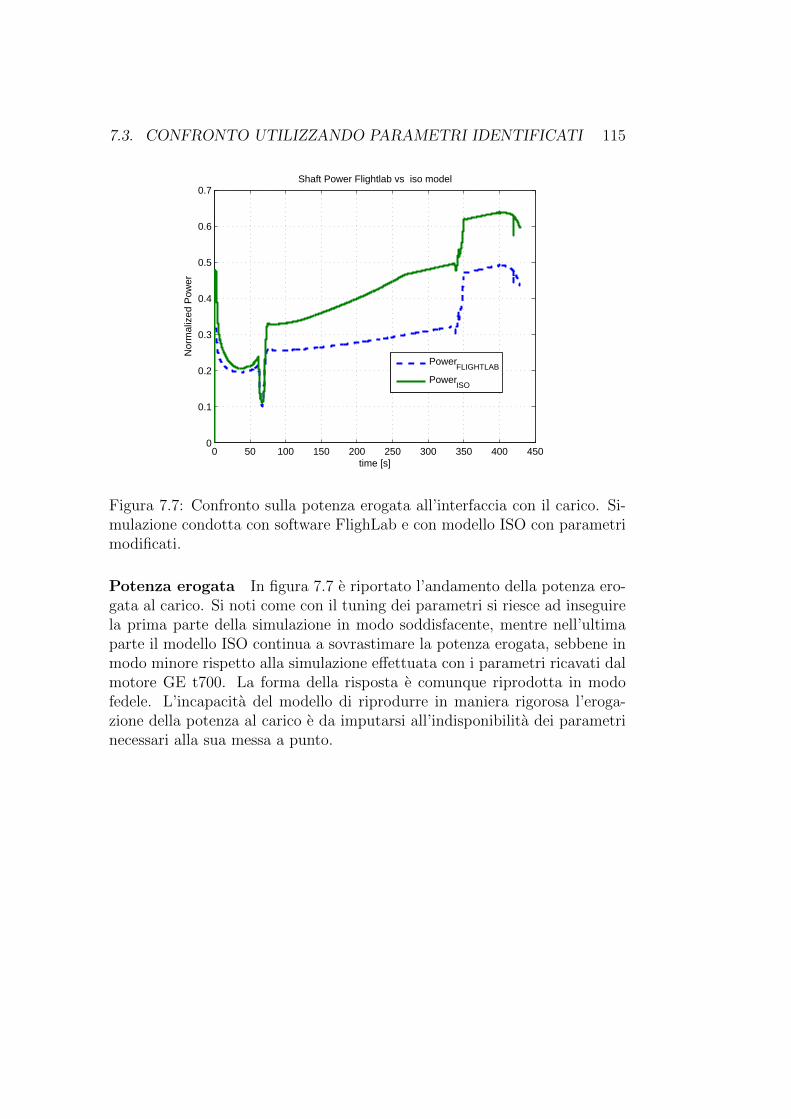
7.3. CONFRONTO UTILIZZANDO PARAMETRI IDENTIFICATI 115
0 50 100 150 200 250 300 350 400 4500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
time [s]
Nor
mal
ized
Pow
erShaft Power Flightlab vs iso model
PowerFLIGHTLAB
PowerISO
Figura 7.7: Confronto sulla potenza erogata all’interfaccia con il carico. Si-mulazione condotta con software FlighLab e con modello ISO con parametrimodificati.
Potenza erogata In figura 7.7 e riportato l’andamento della potenza ero-gata al carico. Si noti come con il tuning dei parametri si riesce ad inseguirela prima parte della simulazione in modo soddisfacente, mentre nell’ultimaparte il modello ISO continua a sovrastimare la potenza erogata, sebbene inmodo minore rispetto alla simulazione effettuata con i parametri ricavati dalmotore GE t700. La forma della risposta e comunque riprodotta in modofedele. L’incapacita del modello di riprodurre in maniera rigorosa l’eroga-zione della potenza al carico e da imputarsi all’indisponibilita dei parametrinecessari alla sua messa a punto.

116 CAPITOLO 7. SIMULAZIONE DI UNA MANOVRA

Capitolo 8
Conclusioni e sviluppi futuri
8.1 Conclusioni
In questo lavoro di tesi e stato sviluppato un modello termodinamico sem-plificato per la simulazione di motori turboalbero di impiego elicotteristico.
Il modello e concepito per essere integrato in codici di simulazione di Mec-canica del Volo (anche real-time), in modo da aumentarne la capacita di de-scrivere fedelmente il comportamento dell’elicottero al di fuori delle condizio-ni di regime stazionarie, estendendo l’analisi a condizioni di volo manovratodove risultano significativi i transitori nell’erogazione della potenza.
Il modello e stato implementato sia in linguaggio Matlab, sia in linguaggioC. E stata posta particolare attenzione nella possibilita di adattamento almaggior numero possibile di propulsori per elicotteri e sono stati forniti glistrumenti per personalizzare il codice in base alle esigenze dell’utente.
Inizialmente, il modello e stato sviluppato in una versione fortementedipendente da funzioni parametriche, ricavate dal comportamento di un pro-pulsore esistente e ben documentato. Questa versione, capace di riprodurrecon errori minimi il funzionamento di tale propulsore, e servita da base dilavoro per lo sviluppo di versioni successive caratterizzate da una maggio-re indipendenza da andamenti parametrici ricavati dalla letteratura, capacidi riprodurre efficacemente il comportamento di una classe di propulsori aturbina per elicotteri a partire da un numero ridotto di dati di modellazione.
Ogni versione del modello e stata validata sia considerando la risposta aregime in diverse situazioni di funzionamento, sia la sua risposta dinamicaad una portata di combustibile con profilo temporale a scalino, comparandoi risultati con dati sperimentali disponibili in letteratura.
Il modello termomeccanico del propulsore e stato quindi integrato dallosviluppo di un controllore di tipo PID che ne governa la dinamica secondo una
117

118 CAPITOLO 8. CONCLUSIONI E SVILUPPI FUTURI
logica del tipo correntemente utilizzato nei FADEC (Full Authority DigitalEngine Control). Tale controllore agisce direttamente sull’entita del flussodi carburante immesso in camera di combustione per regolare la potenzaraccolta sul secondo albero del propulsore.
Il modello sviluppato e stato infine adattato al caso di un propulsore cor-rentemente utilizzato da AgustaWestland Spa, ricevendo in ingresso la storiadella portata di combustibile corrispondente ad una traiettoria manovrata didiscesa rapida. I dati di ingresso, cosı come quelli di confronto per i risultati,sono stati forniti da un modello di Meccanica del Volo validato in uso pressol’azienda.
I risultati ottenuti dalle simulazioni mostrano come il modello sia facil-mente estendibile ad applicazioni diverse attraverso una dozzina di parame-tri caratteristici del motore da simulare. Durante il processo di validazione,confrontandosi con dati sperimentali, si e dimostrato come il comportamen-to di un motore reale venga ben approssimato dal modello. Confrontandosipoi con software di simulazione piu sofisticati per due diversi motori, si edimostrato come i risultati ottenuti riproducano in modo accurato la di-namica del propulsore, a patto di calibrare accuratamente i parametri dipersonalizzazione.
I valori degli errori commessi sono giustificati dall’esiguita del numero diparametri utilizzati per caratterizzare ogni motore: l’accuratezza del modelloe in linea con l’intento di ottenere uno strumento di simulazione veloce damettere a punto attraverso poche grandezze di personalizzazione.
La principale limitazione di tale modello e quella di simulare il funziona-mento del propulsore in condizioni non troppo lontane dai regimi di funzio-namento tipici. Nonostante il comportamento del modello si sia dimostratosempre rispondente alla fisica del problema, non e possibile fornire un ri-scontro di validita della simulazione per regimi di funzionamento del motoremolto lontani da quelli nominali perche parte della modellazione e avvenuta apartire da dati sperimentali ricavati in condizioni vicine a quelle di progetto.
8.2 Sviluppi futuri
La continuazione piu naturale di questo lavoro di tesi consiste nell’effetti-va integrazione del modello termomeccanico del propulsore all’interno di uncodice di simulazione di Meccanica del Volo dell’elicottero, da validare attra-verso il confronto con strumenti analoghi, di tipo proprietario e quindi noninteramente sotto il controllo dell’utente, ovvero di dati provenienti da provedi volo.

8.2. SVILUPPI FUTURI 119
Quest’attivita sarebbe in grado di mettere in luce i punti di forza e lelacune del modello, fornendo indicazioni per ulteriori correzioni e sviluppiche lo mettano in gardo di adattarsi con fedelta a maggior numero possibiledi applicazioni.
Il codice potrebbe essere poi reso piu complesso, modellando dei fenomeniche nel presente lavoro sono stati trascurati per motivi di semplicita e ditempo. In paricolare, potrebbe essere sviluppato un modello di trasmissionee dispersione del calore, un modello di usura dei componenti meccanici edi stima della variazione dei rendimenti dei vari componenti in base allecondizioni di impiego del motore.
Si potrebbe infine considerare la possibilita di implementare una logicadi co-simulazione per separare le dinamiche piu veloci (nella gran parte delleapplicazioni costituite dal quelle termiche), dalle dinamiche piu lente (gene-ralmente quelle meccaniche): in tal modo sarebbe possibile rilassare il passodi integrazione temporale del codice e ottenere un codice ancora piu velocenell’esecuzione.

120 CAPITOLO 8. CONCLUSIONI E SVILUPPI FUTURI

Ringraziamenti
Il primo ringraziamento va al Professor Trainelli, per la gentilezza e la dispo-nibilita dimostrata durante la preparazione di questo lavoro: la sua guida estata preziosa e fondamentale durante tutti questi mesi.
Un ringraziamento particolare va all’Ingegner Leonello e all’Ingegner Bian-co Mengotti che hanno messo a mia disposizione il loro tempo e la loro profes-sionalita ogni volta che necessitavo di un loro aiuto, con pazienza e gentilezza.
Alla mia famiglia, che ha reso possibile tutto quanto, vanno il mio affettoe la mia gratitudine. In particolare ai miei nonni, che avrei voluto abbrac-ciare piu spesso.
Grazie ad Irene, che ha avuto pazienza durante tutti questi esami.
Un grazie di cuore a tutti i miei amici, che hanno condiviso con me deglianni belli e intensi: Nicolo, Cristy, Paolo, Bombo, Maria Chiara, Edo, Fede,Luca, Carlos, Daniele, Francesco, Hombre, Giorgio, Juri, Simo, Barbara, Vit-torio, Zizzius, Matteo, Javi, Angelo, Lucia, Balza, Geppo, Giovanni, Romeo,Arrigo, Srdjan, Riccardo, Fede, Ale.

122 CAPITOLO 8. CONCLUSIONI E SVILUPPI FUTURI

Bibliografia
[1] P.P. Walsh and P. Fletcher. Gas Turbine Performance, Second Edition.Blackwell Science, Limited, 2004.
[2] U. Ghezzi. Motori per aereomobili. Politecnico. Manuali. Libreria Clup,2005.
[3] M. Arra. Elicottero (l’). Biblioteca tecnica Hoepli. Hoepli, 2001.
[4] A. Linke-Diesinger. Systems of Commercial Turbofan Engines: AnIntroduction to Systems Functions. Springer-Verlag, 2008.
[5] M. Ballin. A High Fidelity Real Time Simulation of a small TurboshaftEngine. NASA technical memorandum 100991, 1988.
[6] A. Duyar, Z. Gu, and J. Litt. A simplified dynamic model of the t700turboshaft engine. Journal of the American Helicopter Society, 40:62 –70, 1995.
[7] S. Camporeale, B. Fortunato, and M. Mastrovito. A modular code forreal time dynamic simulation of gas turbines in simulink. Transactionsof the ASME, 128:506 – 517, 2006.
[8] G. Kocer. Aerothermodynamic modeling and simulation of gas turbinesfor transient operating conditions, 2008.
[9] O. Uzol. A new high-fidelity transient aerothermal model for real-time si-mulations of the t700 helicopter turboshaft engine. Isi Bilimi ve TeknigiDergisi, 31:37–44, 2010.
[10] W. Visser and M.J. Broomhead. GSP A generic object-oriented gasturbine simulation environment, 2000.
[11] W.P.J. Visser, M.J. Broomhead, and J. van der Vorst. Terts, a genericreal-time gas turbine simulation environment. NLR-TP-2002-069, 1:1 –20, 2001.
123

124 BIBLIOGRAFIA
[12] A. Guha. An efficient generic method for calculating the properties ofcombustion products. IMechE, 215:375–387, 2000.
[13] Coordinating Research Council. Handbook of Aviation Fuel Properties,1983.
[14] M. Galassi, J. Davies, J. Theiler, et al. GNU Scientific Library. 2011.
[15] G. Magnani, G. Ferretti, and P. Rocco. Tecnologie dei sistemi dicontrollo. Istruzione scientifica. McGraw-Hill Companies, 2007.
[16] K.J. Astrom and T. Hagglund. PID Controllers: Theory, Design andTuning. Setting the standard for automation. Isa, 1995.
[17] P.A. Jackson, K. Munson, L.T. Peacock, S. Bushell, and D. Willis. Ja-ne’s All the World’s Aircraft 2012-2013. IHS Jane’s All the World’sAircraft. Jane’s Information Group, 2012.
[18] T. Schobeiri. Getran: A generic, modularly structured computer co-de for simulation of dynamic behavior of aero- and power generationgas turbine engines. ASME, Turbomachinery Committee, 116:483–494,1994.
[19] D. Pashayev, D. Askerov, C. Ardil, and R. Sadiqov. Numerical modelingof gas turbine engines. International Journal of Computational andMathematical Sciences, 1:53–60, 2007.
[20] P.A. Jackson, K. Munson, L.T. Peacock, S. Bushell, and D. Willis. Ja-ne’s All the World’s Aircraft 2011-2012. IHS Jane’s All the World’sAircraft. Jane’s Information Group, 2011.