otomatİk kontrol sİstemlerİ - fırat...
TRANSCRIPT

Bölüm 1
Kontrol Sistemlerine Giriş
OTOMATİK KONTROL SİSTEMLERİ
Prof. Dr. Muammer GÖKBULUT
Seçkin Yayıncılık 3. Baskı Ocak 2019
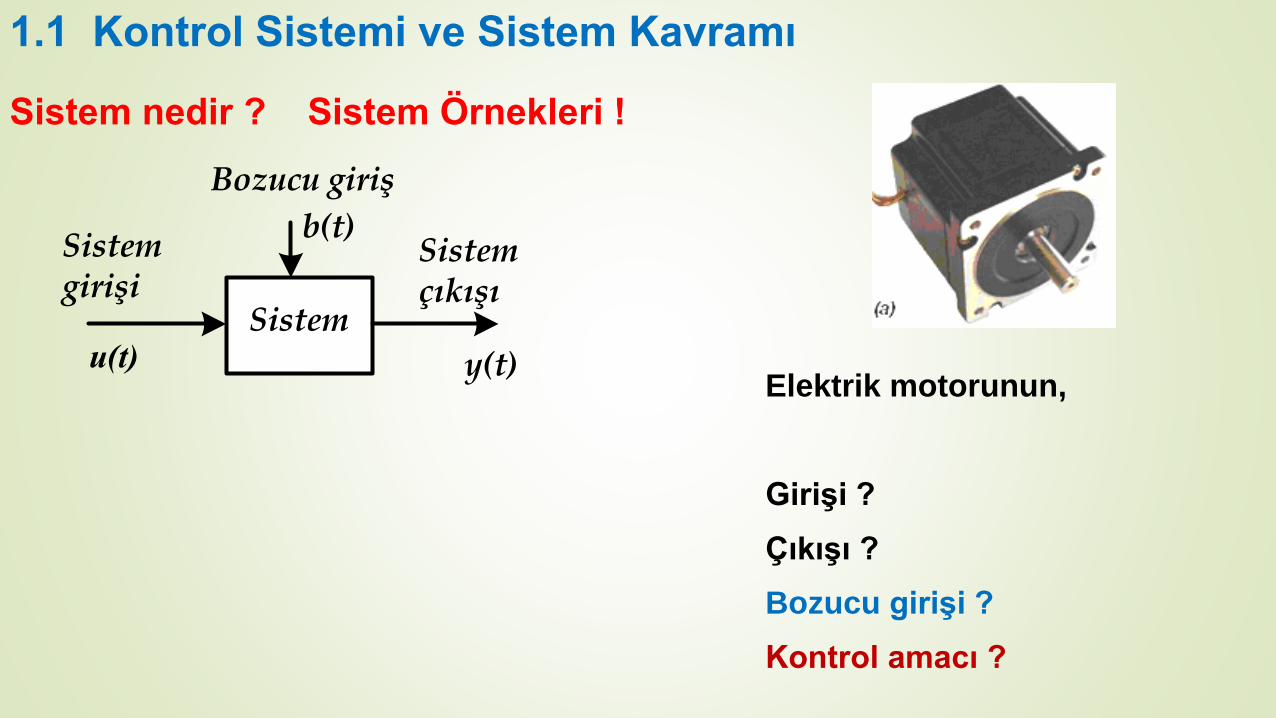
Sistemu(t) y(t)
Sistemgirişi
Sistemçıkışı
Bozucu giriş
b(t)
Elektrik motorunun,
Girişi ?
Çıkışı ?
Bozucu girişi ?
Kontrol amacı ?
Sistem nedir ? Sistem Örnekleri !
1.1 Kontrol Sistemi ve Sistem Kavramı

Şekil 1.3 Bir freze tezgahının görünüşü (cncmasters)
Devam: Sistem Örnekleri
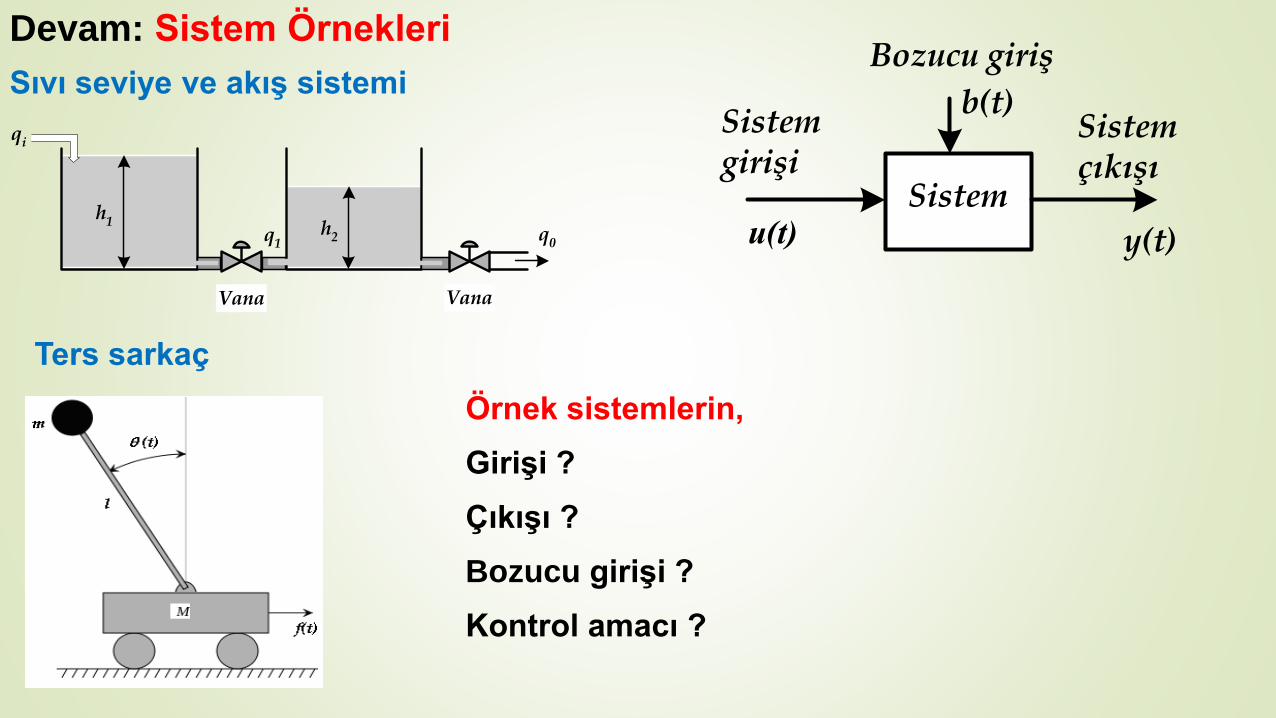
qi
q0
h1
Vana
h2q1
Vana
Örnek sistemlerin,
Girişi ?
Çıkışı ?
Bozucu girişi ?
Kontrol amacı ?
Devam: Sistem Örnekleri
Sistemu(t) y(t)
Sistemgirişi
Sistemçıkışı
Bozucu giriş
b(t)Sıvı seviye ve akış sistemi
Ters sarkaç
SistemKontrolör
u(t)r(t) y(t)
Referansgiriş
Sistemgirişi
Sistemçıkışı
Bozucu giriş
b(t)
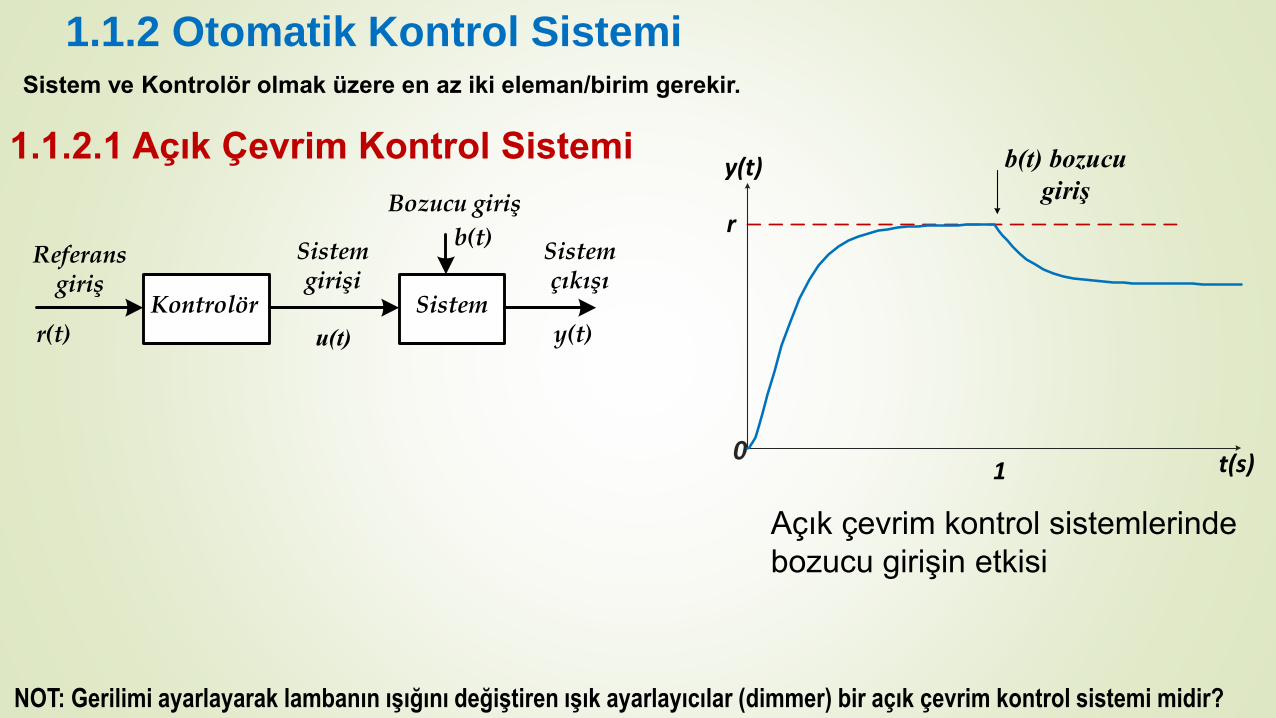
1.1.2 Otomatik Kontrol Sistemi
1.1.2.1 Açık Çevrim Kontrol Sistemi
0 t(s)
y(t) b(t) bozucu
giriş
1
r
Açık çevrim kontrol sistemlerinde
bozucu girişin etkisi
Sistem ve Kontrolör olmak üzere en az iki eleman/birim gerekir.
NOT: Gerilimi ayarlayarak lambanın ışığını değiştiren ışık ayarlayıcılar (dimmer) bir açık çevrim kontrol sistemi midir?

Su tahliye
Su ısıtma
Durulama /Kurutma
220 vAC
Zamanlayıcı
Su/deterjanPompalama
Şekil 1.7 Bir bulaşık makinasının
prensip kontrol şeması.
Örnek: Açık çevrim kontrolör, çamaşır-bulaşık makinalarında olduğu
gibi bazı sistemlerde bir zamanlayıcıdan/programlayıcıdan ibarettir.

Anahtarlama
(DGM)
DC
KıyıcıM
+ V -
w* Hız
kontrolörüw
vc vm
Şekil 1.8 Bir doğru akım motorunun açık çevrim hız kontrolü.
M
3
220 v
AC
300 v
DC
AC-DC
Dönüştürücü
DC-AC
inverter
İnverter
Anahtarlama
Devresi
(DGM)
w* Hız
kontrolörü
vcw
vm
Şekil 1.9 3 fazlı bir asenkron motorun açık çevrim hız kontrolü.
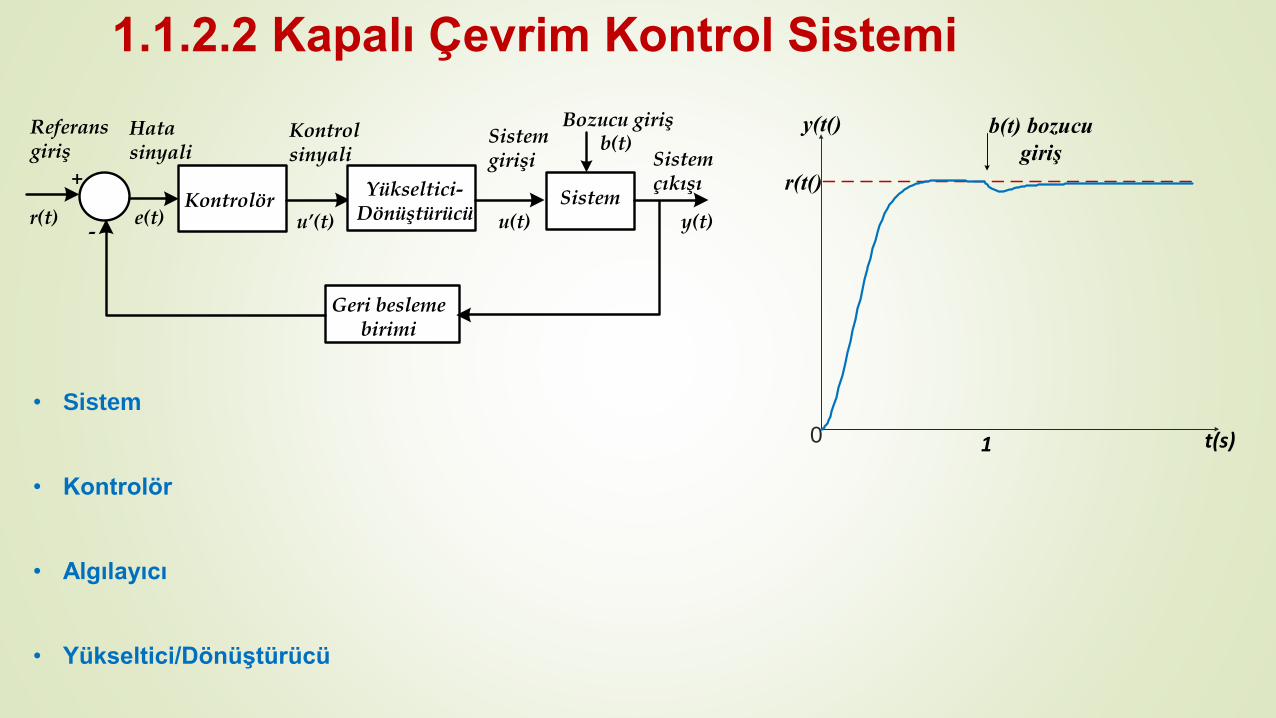
Kontrolör
Referans giriş
r(t)
Sistem girişi
u’(t)
Sistem çıkışı
y(t)
+
-
Sistem
Geri beslemebirimi
Yükseltici-Dönüştürücü
Kontrolsinyali
Hatasinyali
e(t) u(t)
Bozucu girişb(t)
1.1.2.2 Kapalı Çevrim Kontrol Sistemi
t(s)
r(t()
b(t) bozucu
giriş
1
y(t()
0
• Sistem
• Kontrolör
• Algılayıcı
• Yükseltici/Dönüştürücü
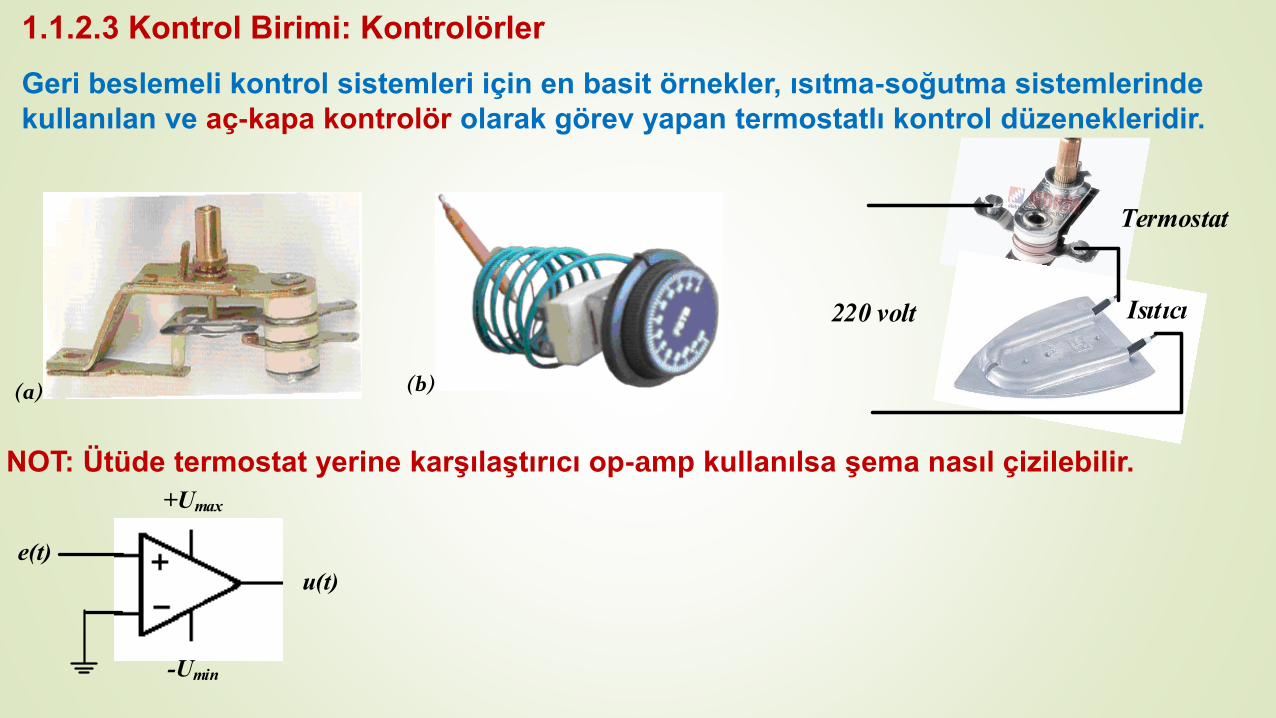
1.1.2.3 Kontrol Birimi: Kontrolörler
Geri beslemeli kontrol sistemleri için en basit örnekler, ısıtma-soğutma sistemlerinde
kullanılan ve aç-kapa kontrolör olarak görev yapan termostatlı kontrol düzenekleridir.
(a) (b)
220 volt
Termostat
Isıtıcı
u(t)
e(t)
+Umax
-Umin
NOT: Ütüde termostat yerine karşılaştırıcı op-amp kullanılsa şema nasıl çizilebilir.
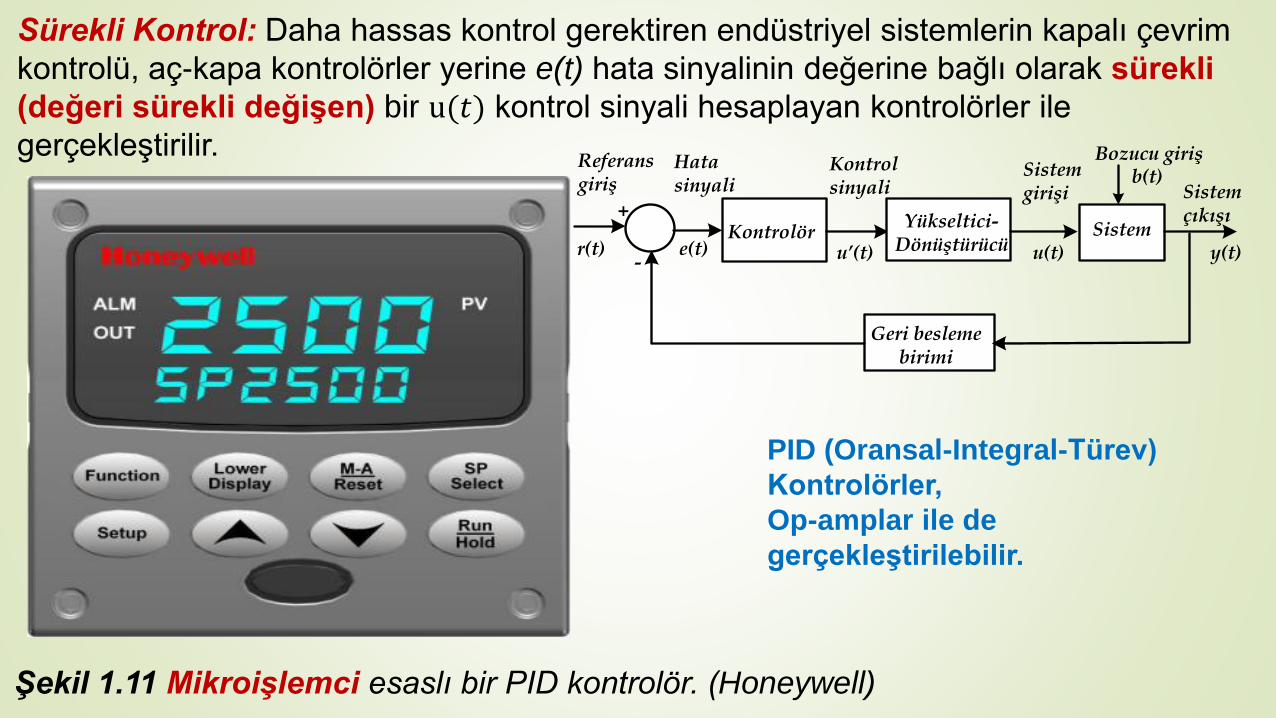
Şekil 1.11 Mikroişlemci esaslı bir PID kontrolör. (Honeywell)
Sürekli Kontrol: Daha hassas kontrol gerektiren endüstriyel sistemlerin kapalı çevrim
kontrolü, aç-kapa kontrolörler yerine e(t) hata sinyalinin değerine bağlı olarak sürekli
(değeri sürekli değişen) bir u(𝑡) kontrol sinyali hesaplayan kontrolörler ile
gerçekleştirilir.
PID (Oransal-Integral-Türev)
Kontrolörler,
Op-amplar ile de
gerçekleştirilebilir.
Kontrolör
Referans giriş
r(t)
Sistem girişi
u’(t)
Sistem çıkışı
y(t)
+
-
Sistem
Geri beslemebirimi
Yükseltici-Dönüştürücü
Kontrolsinyali
Hatasinyali
e(t) u(t)
Bozucu girişb(t)
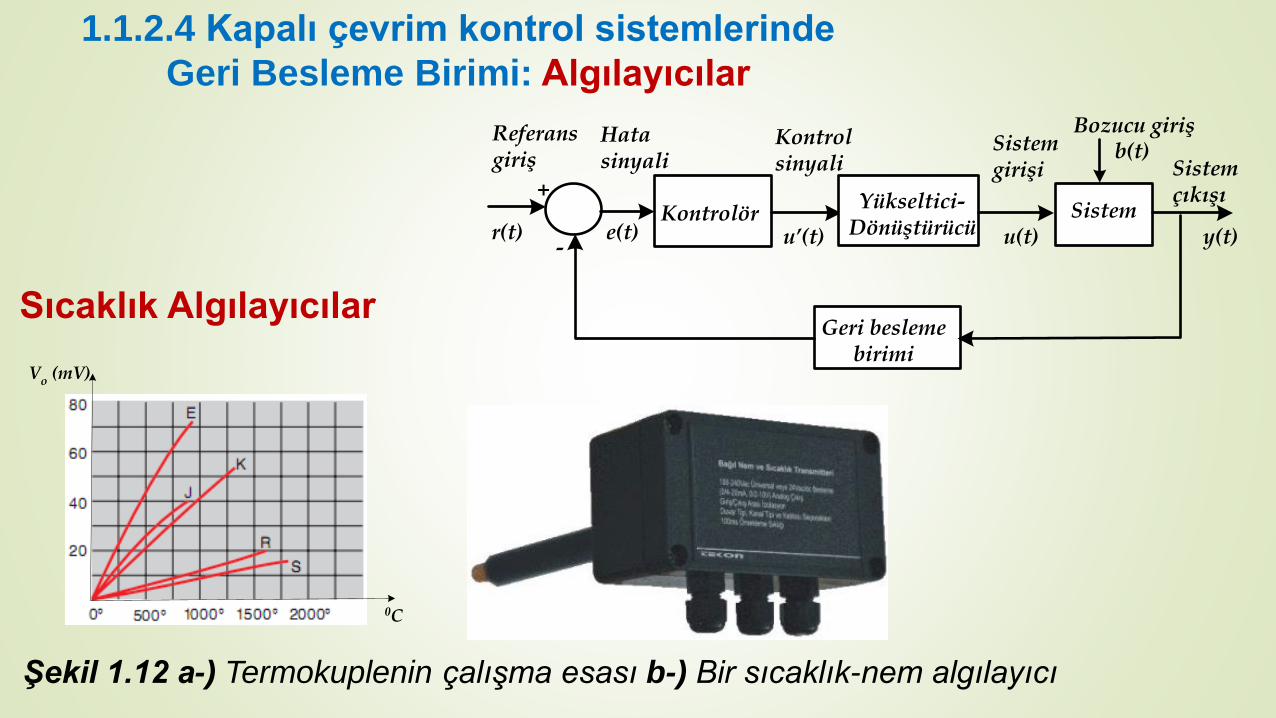
1.1.2.4 Kapalı çevrim kontrol sistemlerinde
Geri Besleme Birimi: Algılayıcılar
0C
Vo (mV)
Şekil 1.12 a-) Termokuplenin çalışma esası b-) Bir sıcaklık-nem algılayıcı
Kontrolör
Referans giriş
r(t)
Sistem girişi
u’(t)
Sistem çıkışı
y(t)
+
-
Sistem
Geri beslemebirimi
Yükseltici-Dönüştürücü
Kontrolsinyali
Hatasinyali
e(t) u(t)
Bozucu girişb(t)
Sıcaklık Algılayıcılar
Basınç girişi Diyafram
KristalElektriksel
çıkış
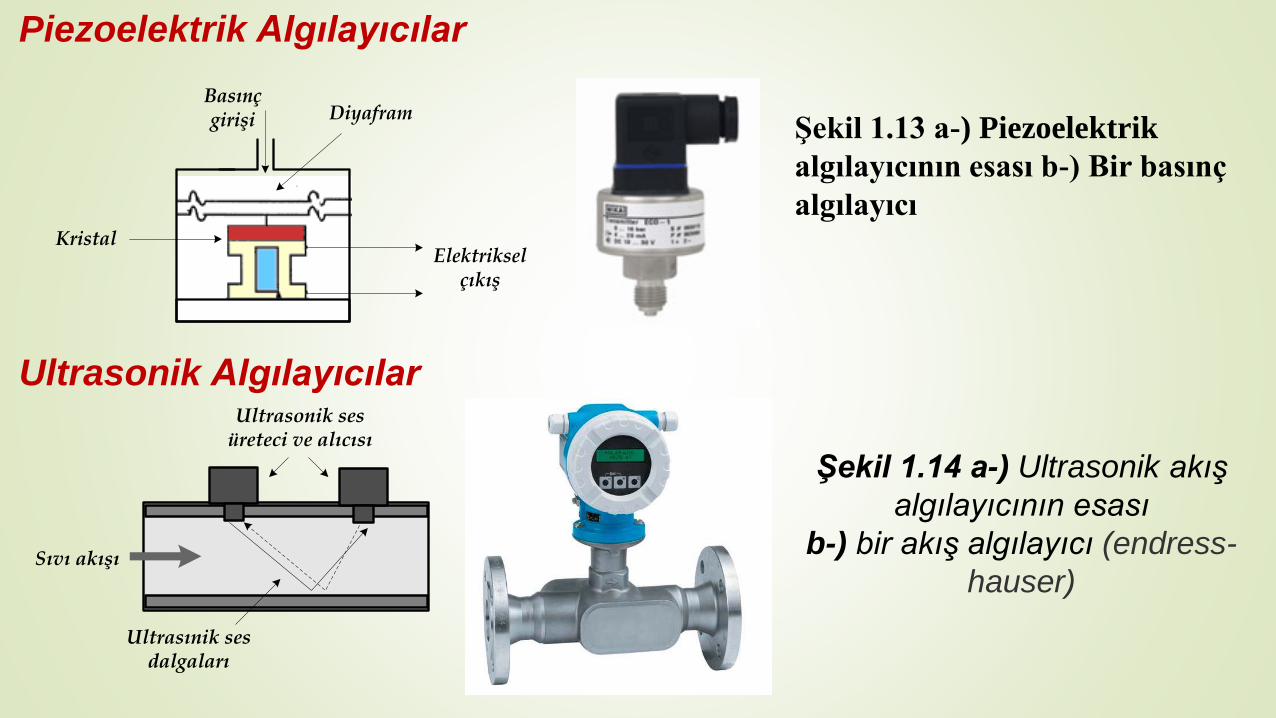
Şekil 1.13 a-) Piezoelektrik
algılayıcının esası b-) Bir basınç
algılayıcı
Piezoelektrik Algılayıcılar
Ultrasonik sesüreteci ve alıcısı
Sıvı akışı
Ultrasınik sesdalgaları
Ultrasonik Algılayıcılar
Şekil 1.14 a-) Ultrasonik akış
algılayıcının esası
b-) bir akış algılayıcı (endress-
hauser)

1.1.2.5 Kapalı çevrim kontrol sistemlerinde
Yükseltici-Dönüştürücü Birimi ya da aktüatörler
MAnahtarlama
(DGM)
vc
vm
+
Vdc
-
Şekil 1.19 Bir doğru akım motorunun gerilim ayarı için DC kıyıcı.
Kontrolör
Referans giriş
r(t)
Sistem girişi
u’(t)
Sistem çıkışı
y(t)
+
-
Sistem
Geri beslemebirimi
Yükseltici-Dönüştürücü
Kontrolsinyali
Hatasinyali
e(t) u(t)
Bozucu girişb(t)
DC Gerilim Ayarı
Tetikleme
Devresi
vc
Isıtıcı
220 v
AC
Transformatör
vtDirenç
TriyakOptik yalıtıcı
v1
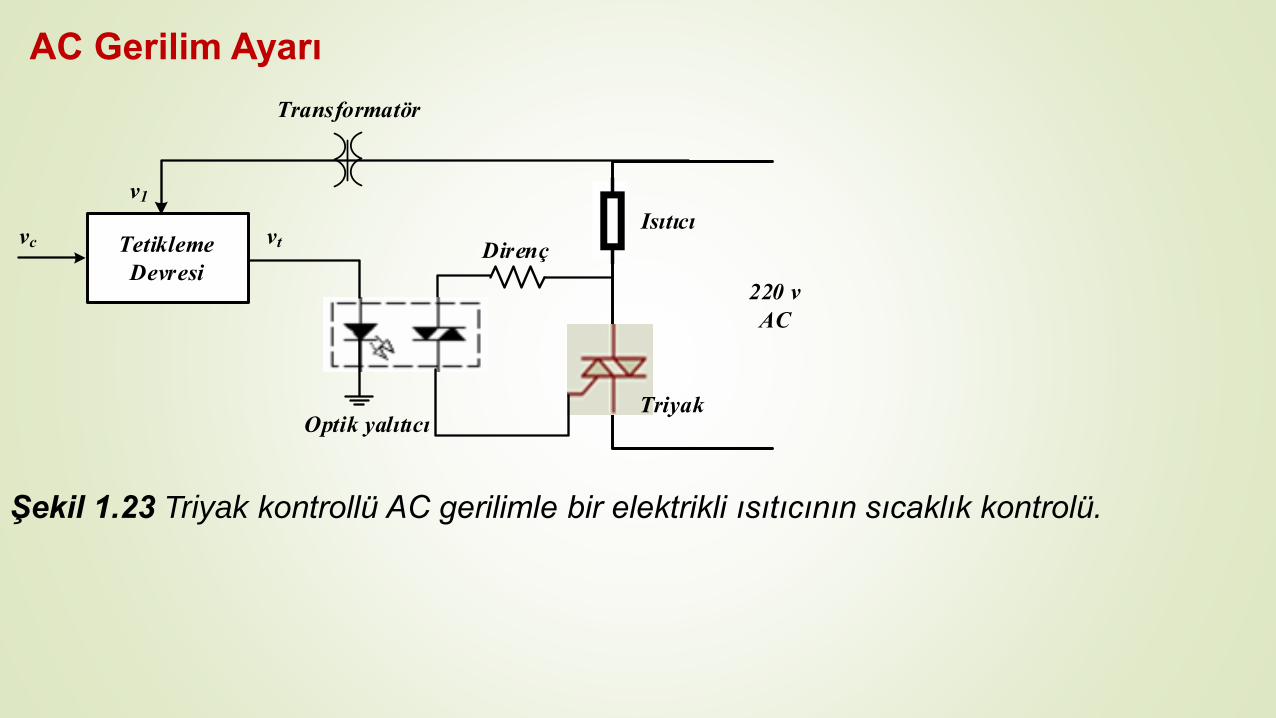
Şekil 1.23 Triyak kontrollü AC gerilimle bir elektrikli ısıtıcının sıcaklık kontrolü.
AC Gerilim Ayarı
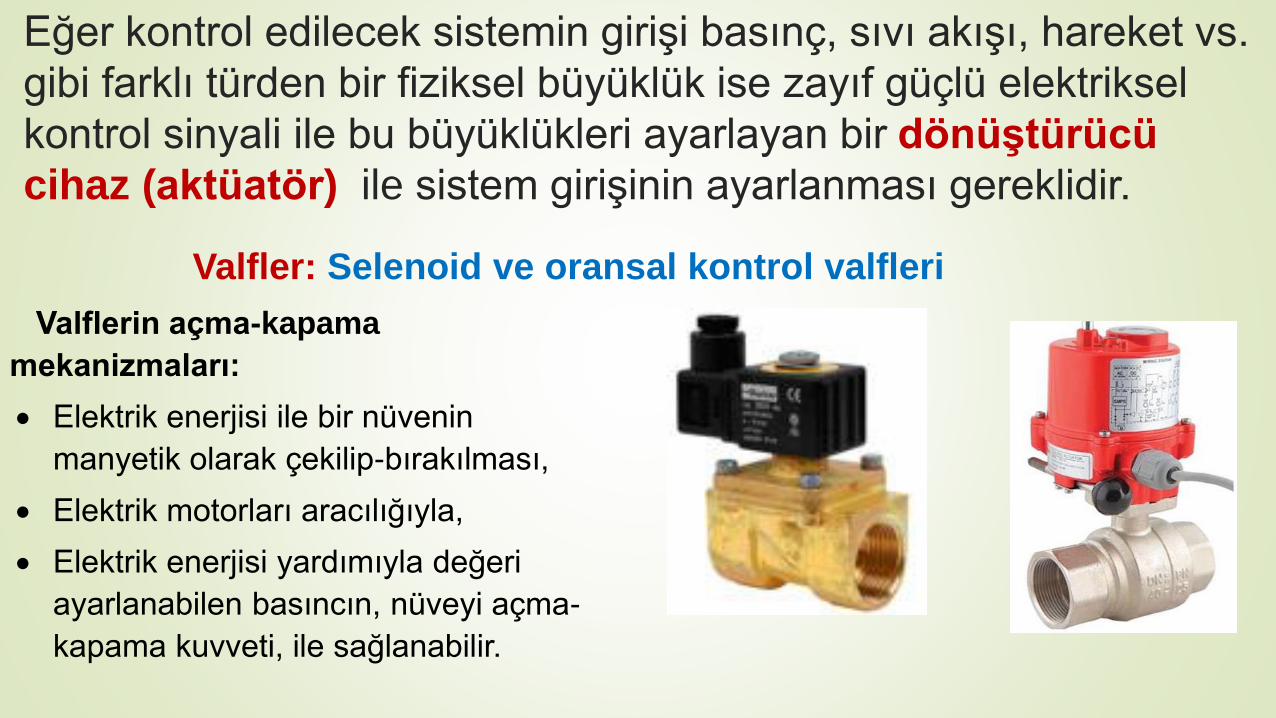
Eğer kontrol edilecek sistemin girişi basınç, sıvı akışı, hareket vs.
gibi farklı türden bir fiziksel büyüklük ise zayıf güçlü elektriksel
kontrol sinyali ile bu büyüklükleri ayarlayan bir dönüştürücü
cihaz (aktüatör) ile sistem girişinin ayarlanması gereklidir.
Valflerin açma-kapama
mekanizmaları:
Elektrik enerjisi ile bir nüvenin
manyetik olarak çekilip-bırakılması,
Elektrik motorları aracılığıyla,
Elektrik enerjisi yardımıyla değeri
ayarlanabilen basıncın, nüveyi açma-
kapama kuvveti, ile sağlanabilir.
Valfler: Selenoid ve oransal kontrol valfleri

Kontrolör
Referans giriş
r(t)
Sistem girişi
u’(t)
Sistem çıkışı
y(t)
+
-
Sistem
Geri beslemebirimi
Yükseltici-Dönüştürücü
Kontrolsinyali
Hatasinyali
e(t) u(t)
Bozucu girişb(t)
Doğrusal bir aktüatör (Gimson Robotics)
Doğrusal aktüatörler

Kontrolör
Güçyükseltici
M TG
220 v AC
0-110 v
u(t)0-10 v
0-10 v
w
Algılayıcı
RaLa
++
-
-
10 v
r(t)
e(t)
DC Motor
Kontrolör
Referans giriş
r(t)
Sistem girişi
u’(t)
Sistem çıkışı
y(t)
+
-
Sistem
Geri beslemebirimi
Yükseltici-Dönüştürücü
Kontrolsinyali
Hatasinyali
e(t) u(t)
Bozucu girişb(t)
1.1.3 Otomatik Kontrol Sistemi Örnekleri
Doğru Akım Motorlarının Hız Kontrolü:
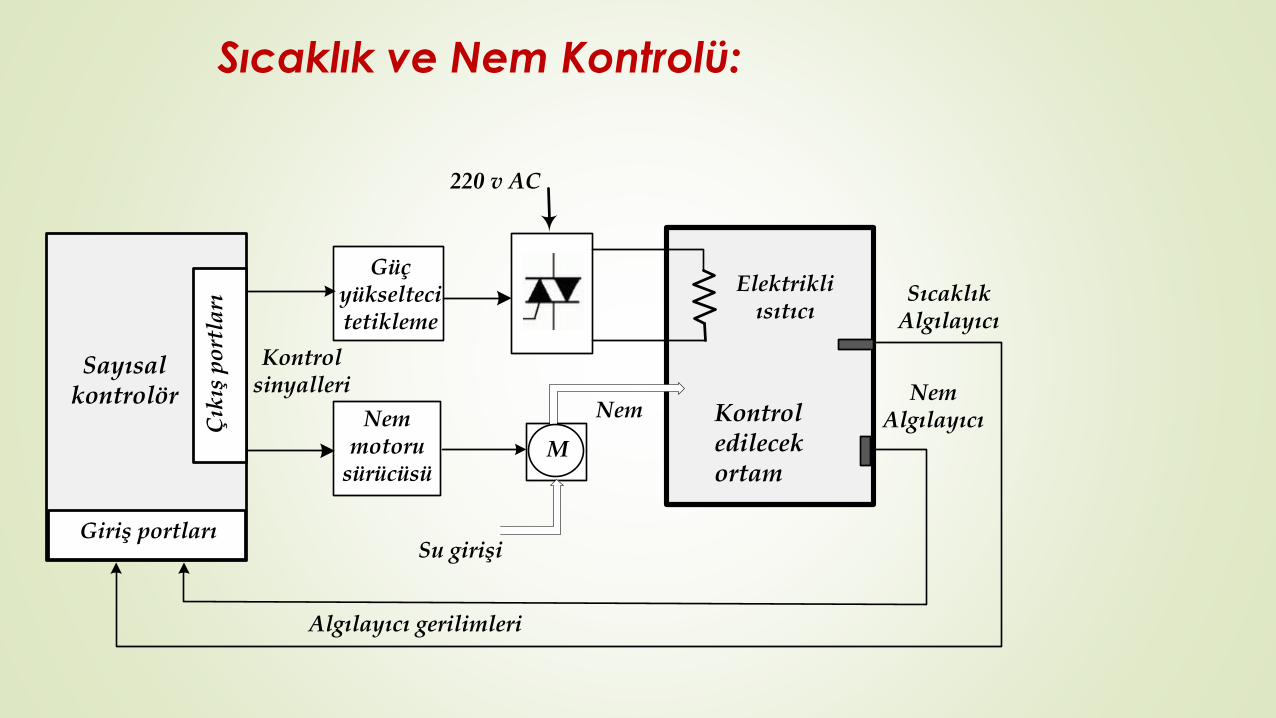
Sıcaklık ve Nem Kontrolü:
220 v AC
Algılayıcı gerilimleri
Nem Algılayıcı
Sıcaklık Algılayıcı
Sayısalkontrolör
Çık
ış p
ort
ları
Giriş portları
M
Elektrikli ısıtıcı
Nem motoru
sürücüsü
Kontrol edilecek ortam
Güç yükseltecitetikleme
Su girişi
Kontrol sinyalleri
Nem

Savunma
düzeneği
sürücüsü
Savunma
düzeneğiKontrolör
+
-
Namlu ya da
füze yönüHedef
Otomatik yönlendirmeli ya da güdümlü savunma sistemleri.

Robot Kolları
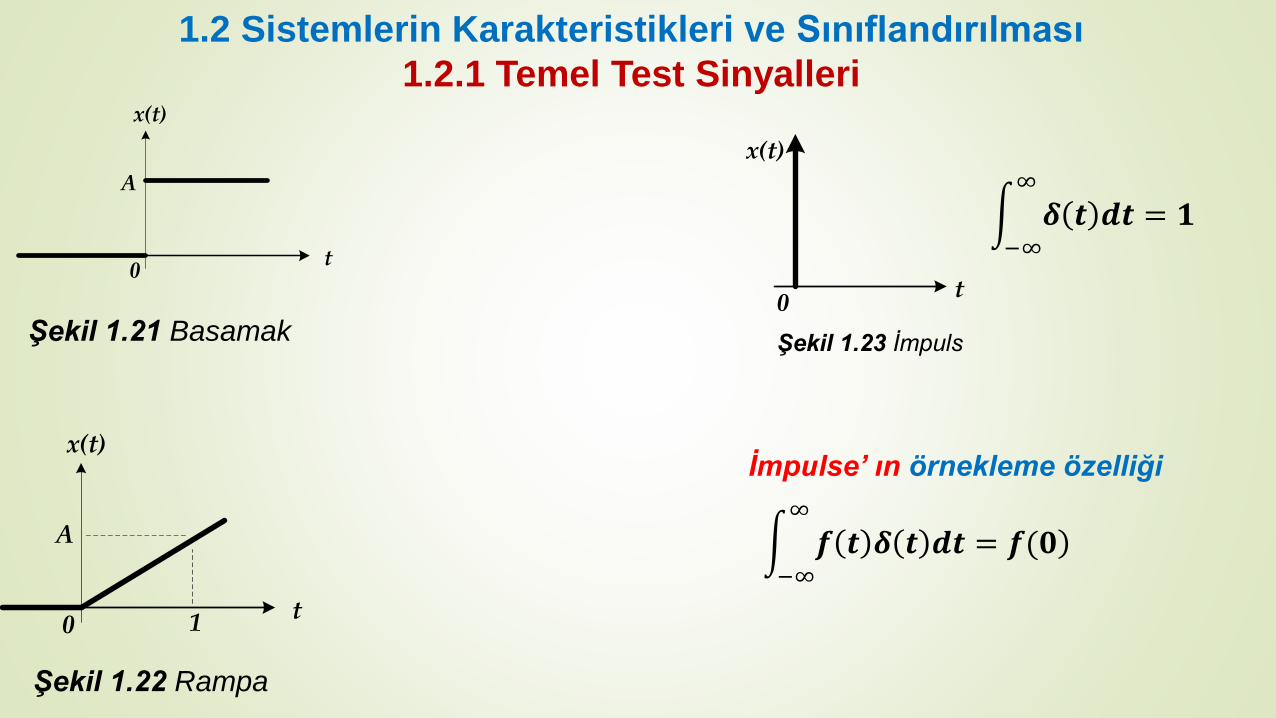
1.2 Sistemlerin Karakteristikleri ve Sınıflandırılması
1.2.1 Temel Test Sinyalleri
t
x(t)
0
A
t
x(t)
0
A
1
t
x(t)
0
Şekil 1.22 Rampa
Şekil 1.21 Basamak
İmpulse’ ın örnekleme özelliği
න−∞
∞
)𝒇 𝒕 𝜹 𝒕 𝒅𝒕 = 𝒇(𝟎
න−∞
∞
𝜹 𝒕 𝒅𝒕 = 𝟏
Şekil 1.23 İmpuls
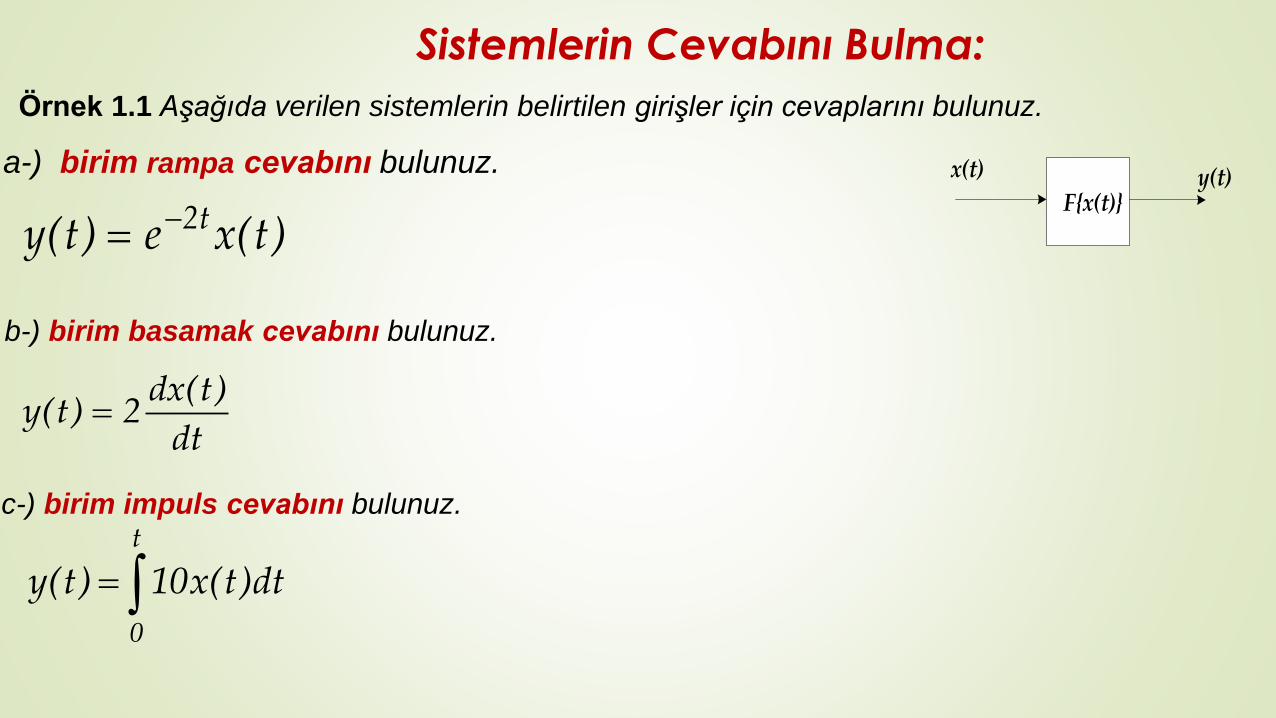
Sistemlerin Cevabını Bulma:
)t(xe)t(y t2
dt
)t(dx2)t(y
t
0
dt)t(x10)t(y
a-) birim rampa cevabını bulunuz.
b-) birim basamak cevabını bulunuz.
c-) birim impuls cevabını bulunuz.
Örnek 1.1 Aşağıda verilen sistemlerin belirtilen girişler için cevaplarını bulunuz.
F{x(t)}y(t)x(t)

1.2.2 Sistemlerin Sınıflandırılması
Dinamik ve Statik Sistemler
Doğrusal ve Doğrusal Olmayan Sistemler
Zamanla Değişen ve Zamanla Değişmeyen Sistemler
)t(tx2)t(y
)t(x)wt(Cos)t(y
t
0
dt)t(x)t(y
1)t(x2)t(y
dt
)t(dx2)t(y
F{x(t)}y(t)x(t)
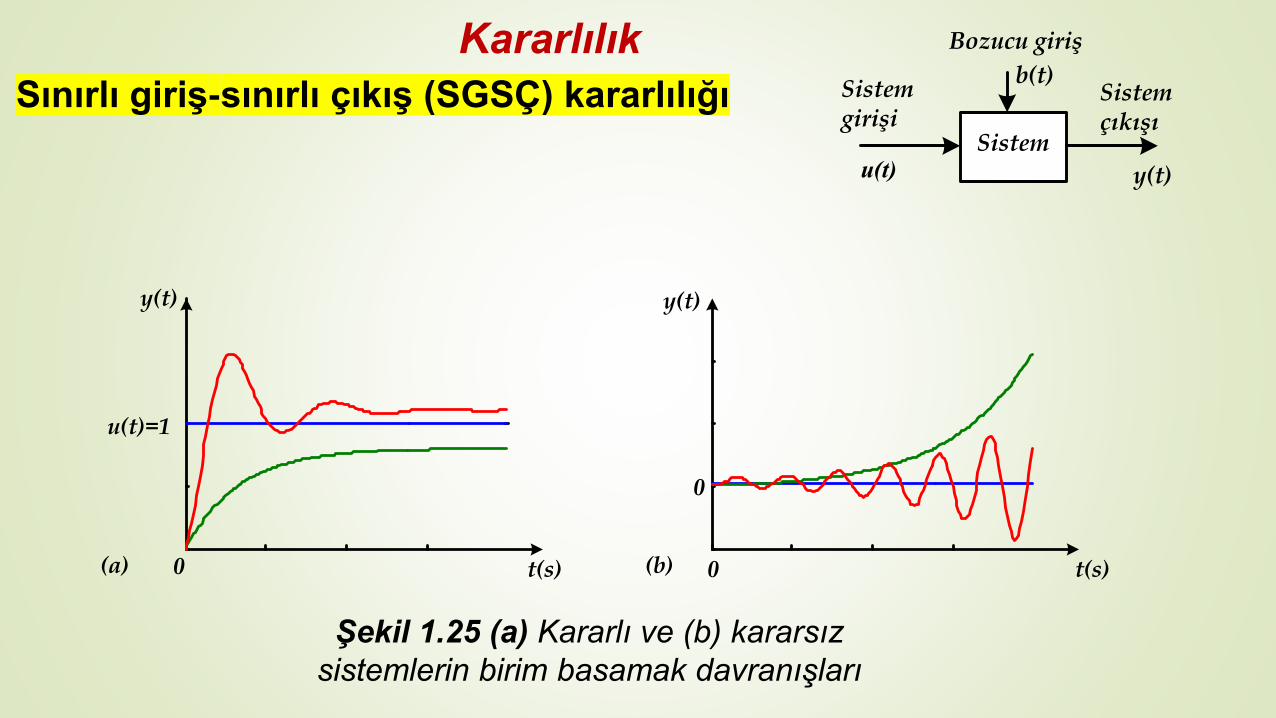
Kararlılık
y(t) y(t)
u(t)=1
t(s) t(s)0 0
0
(a) (b)
Sınırlı giriş-sınırlı çıkış (SGSÇ) kararlılığı
Şekil 1.25 (a) Kararlı ve (b) kararsız
sistemlerin birim basamak davranışları
Sistemu(t) y(t)
Sistemgirişi
Sistemçıkışı
Bozucu giriş
b(t)
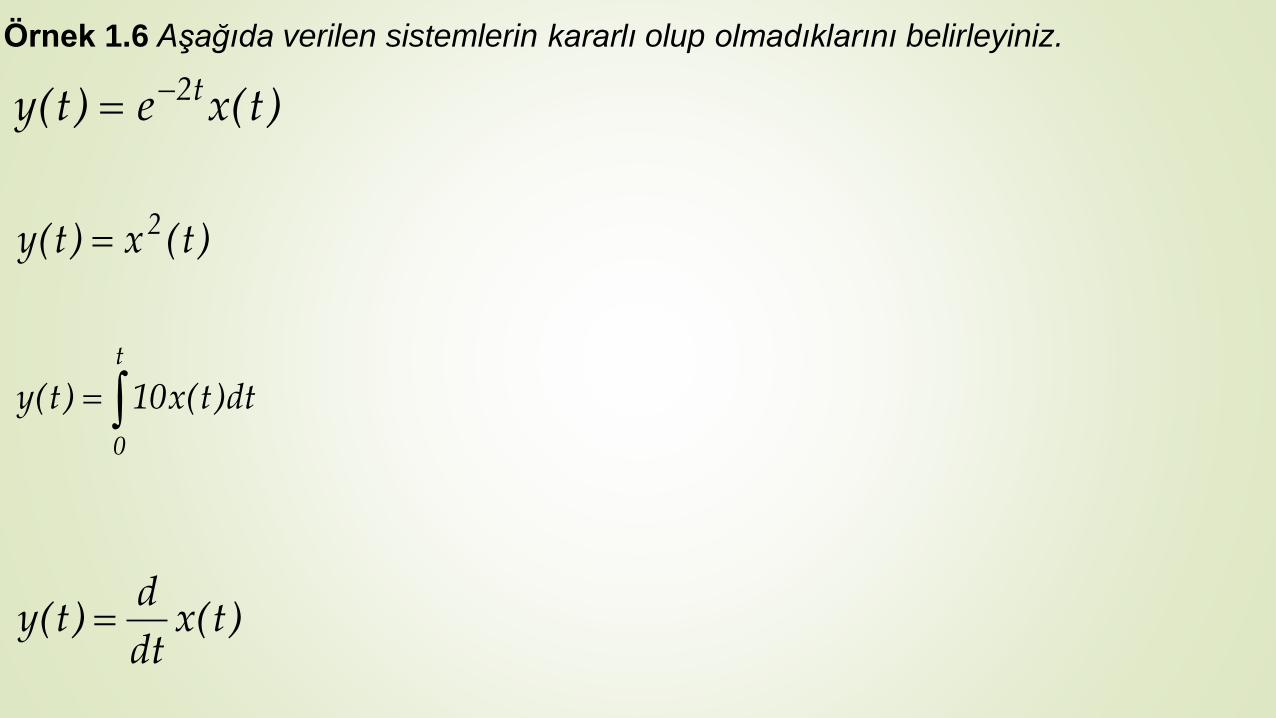
Örnek 1.6 Aşağıda verilen sistemlerin kararlı olup olmadıklarını belirleyiniz.
)t(xe)t(y t2
)t(x)t(y 2
t
0
dt)t(x10)t(y
)t(xdt
d)t(y
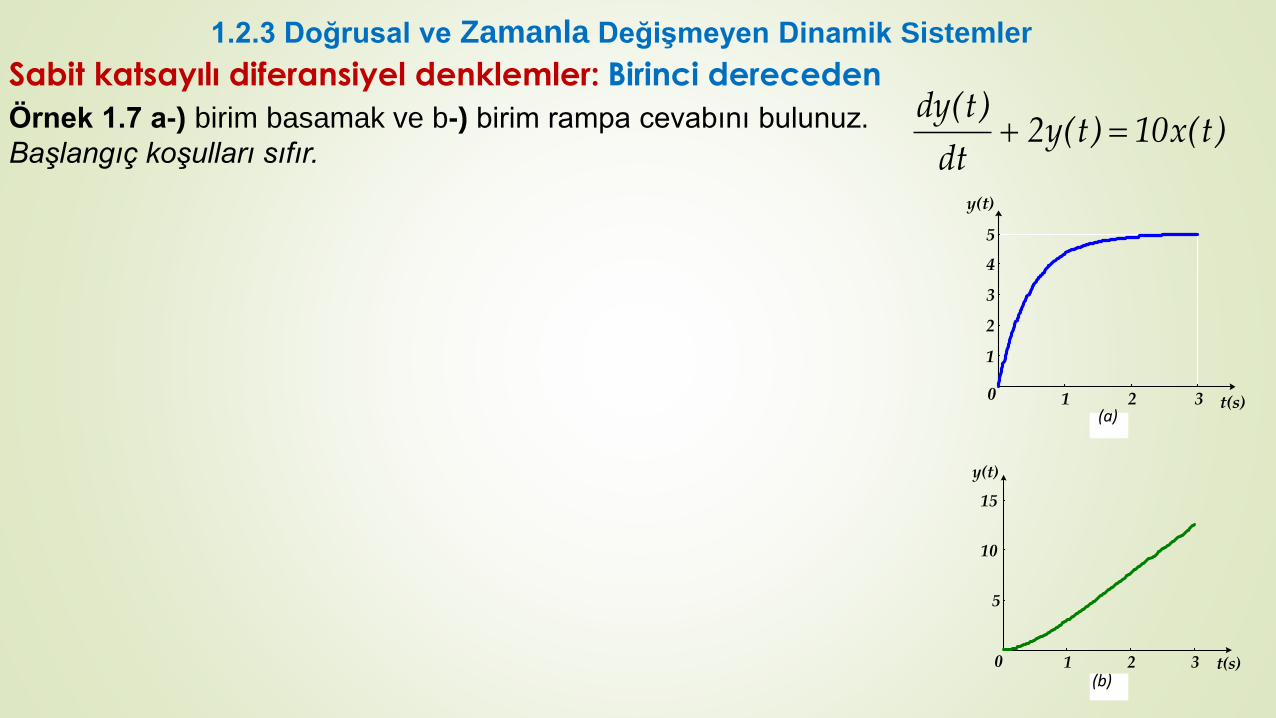
1.2.3 Doğrusal ve Zamanla Değişmeyen Dinamik Sistemler
Sabit katsayılı diferansiyel denklemler: Birinci dereceden
Örnek 1.7 a-) birim basamak ve b-) birim rampa cevabını bulunuz.
Başlangıç koşulları sıfır.)t(x10)t(y2
dt
)t(dy
1 2 30
1
2
3
4
5
t(s)
y(t)
(b)(a)
0 1 2 3
5
10
15
y(t)
t(s)
(c)(b)

Sabit katsayılı diferansiyel denklemler: İkinci dereceden
)t(x4)t(y5dt
)t(dy2
dt
)t(yd2
2
Örnek 1.8 Aşağıda verilen ikinci dereceden doğrusal ve zamanla değişmeyen dinamik
sistemin birim basamak cevabını bulunuz. Başlangıç koşulları sıfırdır.
t(s)
y(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
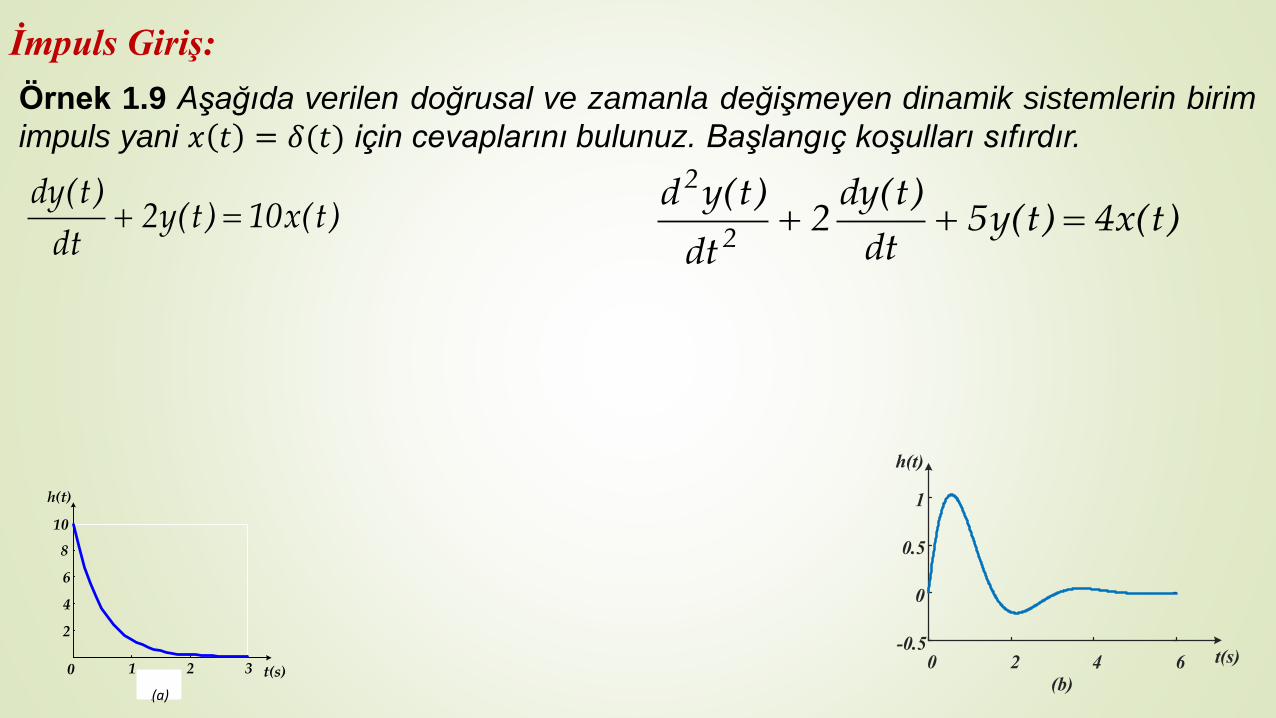
İmpuls Giriş:
Örnek 1.9 Aşağıda verilen doğrusal ve zamanla değişmeyen dinamik sistemlerin birim
impuls yani 𝑥 𝑡 = 𝛿(𝑡) için cevaplarını bulunuz. Başlangıç koşulları sıfırdır.
)t(x10)t(y2dt
)t(dy )t(x4)t(y5
dt
)t(dy2
dt
)t(yd2
2
0 1 2 3
2
4
6
8
10
t(s)
h(t)
(a)(a)
0 2 4 6-0.5
0
0.5
1
t(s)
h(t)
(b)

1.3 Kontrol Kriterleri
KontrolörFc{e(t)}
r(t) y(t)+
-
SistemF{u(t),b(t)}
e(t) u(t)
b(t)
Kapalı çevrim kararlılığı
Yükselme süresi (tr),
Maksimum aşma (M), %M
Yerleşme süresi (ts)
Kalıcı durum hatası
Şekil 1.27 a-) Basamak cevabı üzerinden geçici ve sürekli durum kriterleri
b-) Rampa cevabı ve kalıcı durum hatası.

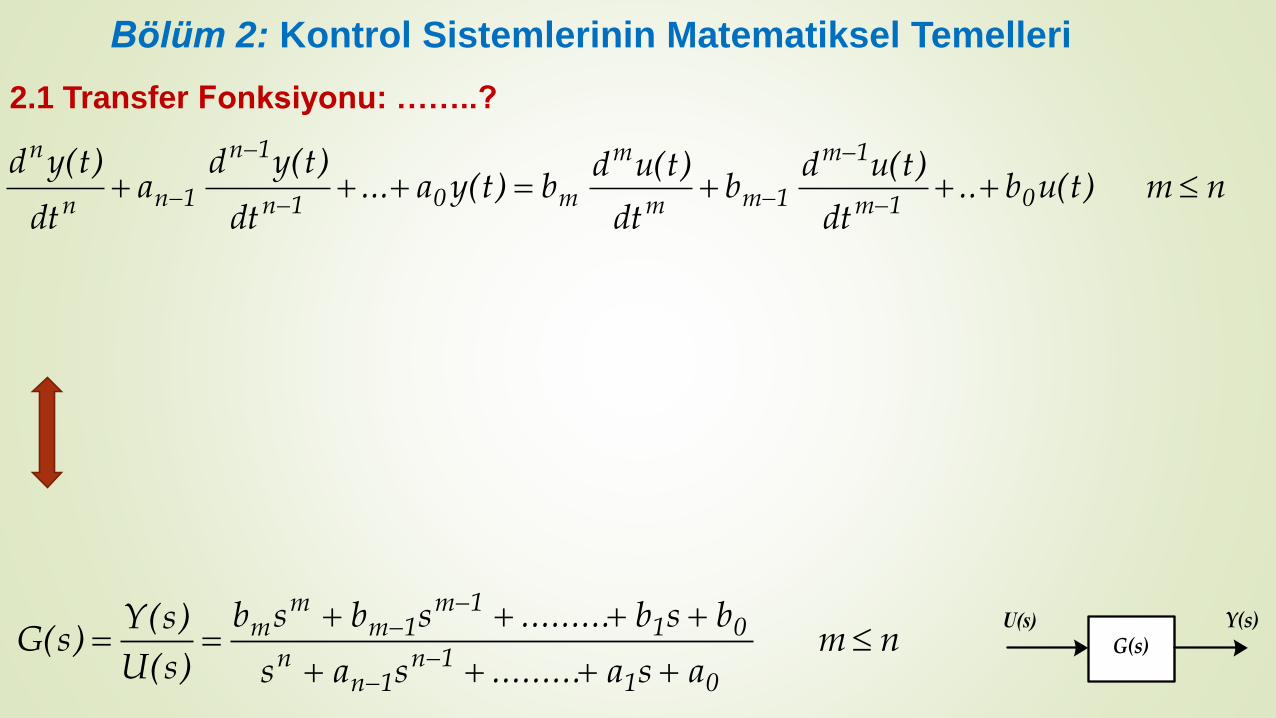
Bölüm 2: Kontrol Sistemlerinin Matematiksel Temelleri
Laplace Dönüşümü: Kısa hatırlatmalar
nm)t(ub..dt
)t(udb
dt
)t(udb)t(ya...
dt
)t(yda
dt
)t(yd01m
1m
1mm
m
m01n
1n
1nn
n
nmasa.........sas
bsb.........sbsb
)s(U
)s(Y)s(G
011n
1nn
011m
1mm
m
Bölüm 2: Kontrol Sistemlerinin Matematiksel Temelleri
2.1 Transfer Fonksiyonu: ……..?
G(s)U(s) Y(s)
G(s)U(s) Y(s)
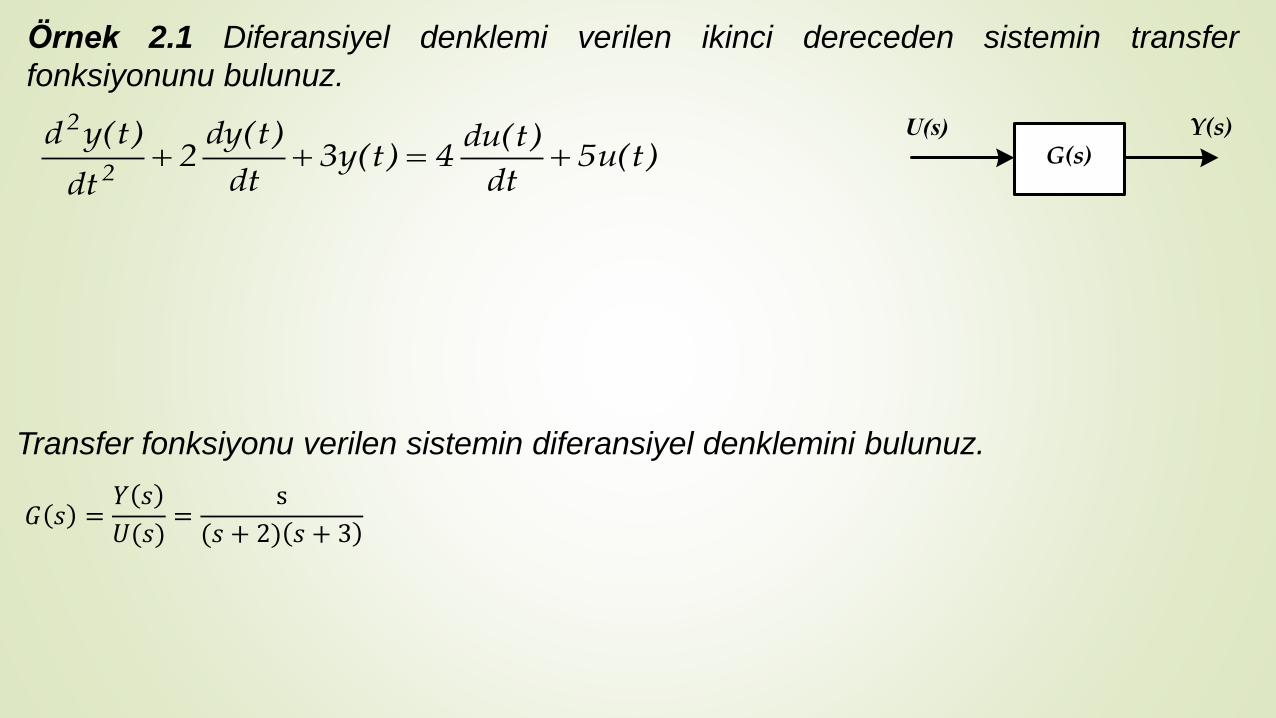
)t(u5dt
)t(du4)t(y3
dt
)t(dy2
dt
)t(yd2
2
Örnek 2.1 Diferansiyel denklemi verilen ikinci dereceden sistemin transfer
fonksiyonunu bulunuz.
𝐺 𝑠 =𝑌 𝑠
𝑈(𝑠)=
s
(𝑠 + 2) 𝑠 + 3
Transfer fonksiyonu verilen sistemin diferansiyel denklemini bulunuz.

2.1.1 Transfer Fonksiyonu ve Sistem Karakteristikleri
)s(U)s(G)s(Y G(s)U(s) Y(s)
Örnek 2.2 Transfer fonksiyonu verilen birinci dereceden sistemin,
a-) Birim impuls b-) Birim basamak cevabını bulunuz.
2s
1)s(G
1. Sistemin cevabını belirleme

2. Sistemin kutupları, sıfırları ve karakteristik denklem
ve Kararlılık: SGSÇ, Asimptotik ve Marjinal kararlılık
)ps.().........ps)(ps(
)zs().........zs)(zs(K)s(G
n21
m21
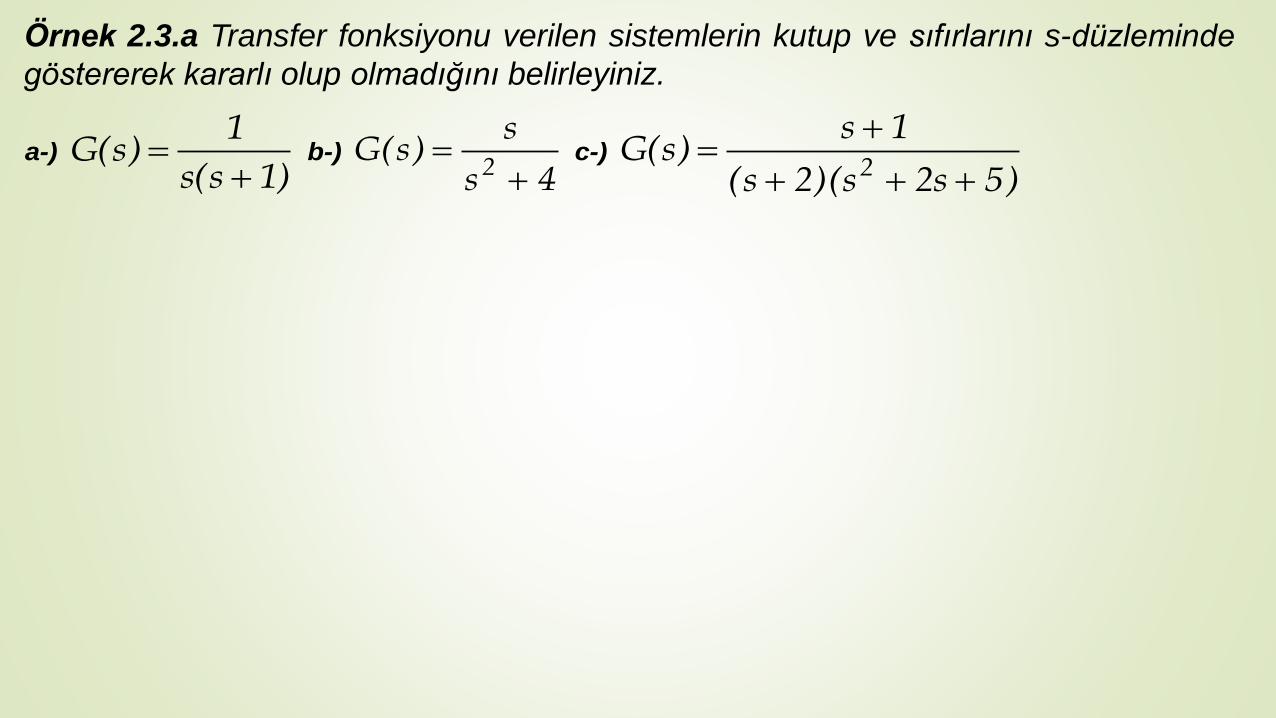
a-) )1s(s
1)s(G
b-)
4s
s)s(G
2 c-)
)5s2s)(2s(
1s)s(G
2
Örnek 2.3.a Transfer fonksiyonu verilen sistemlerin kutup ve sıfırlarını s-düzleminde
göstererek kararlı olup olmadığını belirleyiniz.
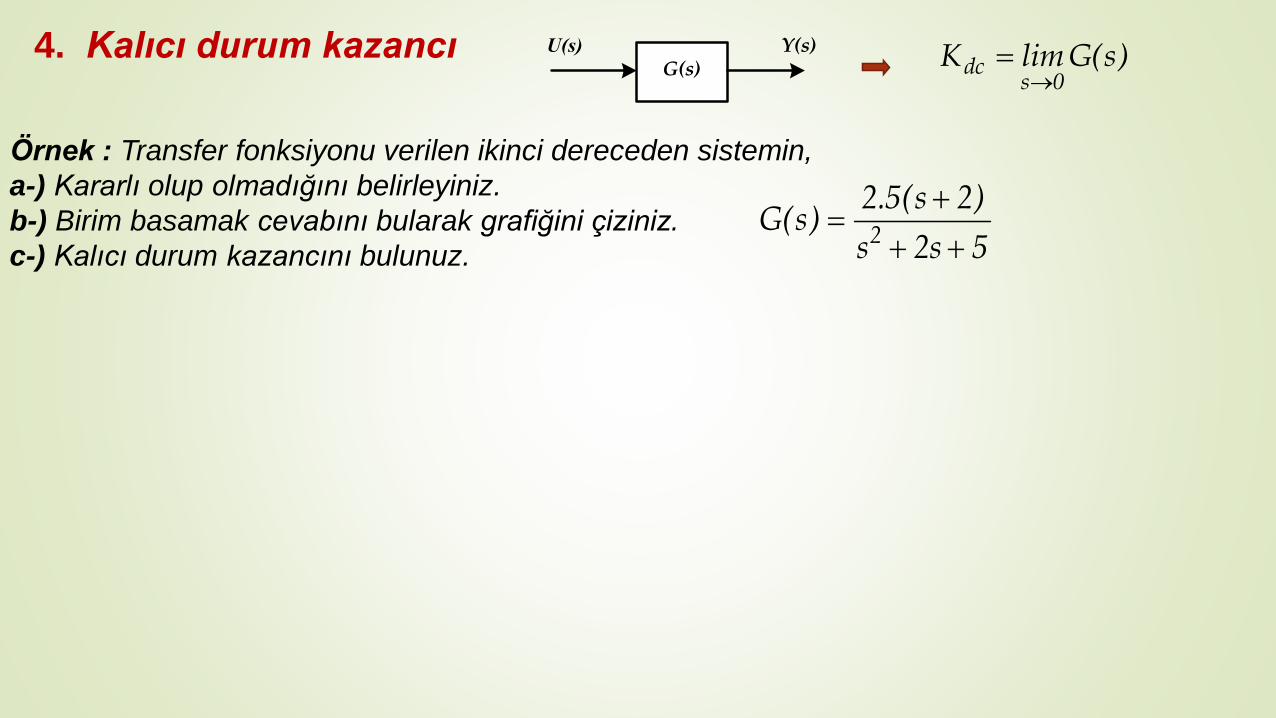
4. Kalıcı durum kazancı )s(GlimK0s
dc
G(s)U(s) Y(s)
Örnek : Transfer fonksiyonu verilen ikinci dereceden sistemin,
a-) Kararlı olup olmadığını belirleyiniz.
b-) Birim basamak cevabını bularak grafiğini çiziniz.
c-) Kalıcı durum kazancını bulunuz. 5s2s
)2s(5.2)s(G
2

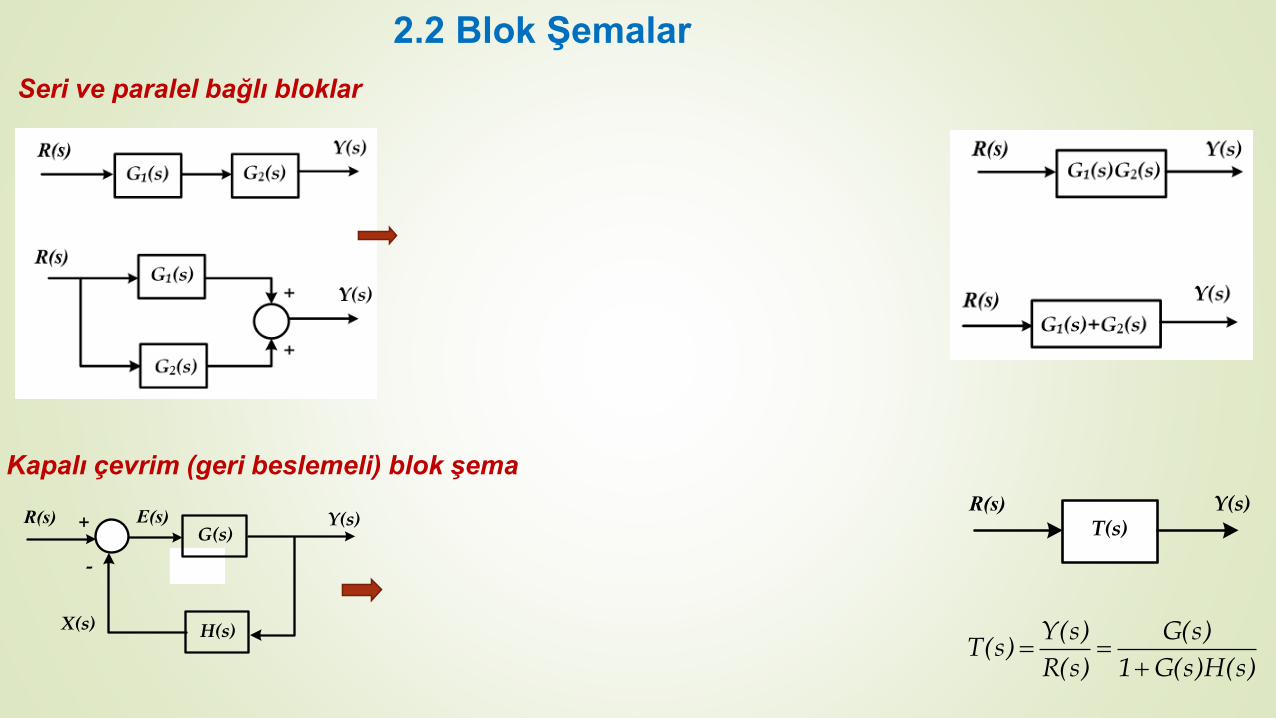
2.2 Blok Şemalar
R(s) E(s) Y(s)
X(s)
G(s)
H(s)
+
-
T(s)R(s) Y(s)
)s(H)s(G1
)s(G
)s(R
)s(Y)s(T
Kapalı çevrim (geri beslemeli) blok şema
Seri ve paralel bağlı bloklar

4s
1)s(H,
1s
6)s(G
Örnek 2.5 Şekilde verilen blok şemada, ileri besleme ve geri besleme yönündeki elemanların
transfer fonksiyonları aşağıda verilmiştir.
a-) Sistemlerin bireysel olarak ya da açık çevrim kararlı olup olmadığını belirleyiniz.
b-) Kapalı çevrim sistemin kararlı olup olmadığını belirleyiniz.
c-) Kapalı çevrim sistemin kalıcı durum kazancını bulunuz.
d-) Kapalı çevrim sistemin birim basamak cevabını bularak grafiğini çiziniz.
R(s) E(s) Y(s)
X(s)
G(s)
H(s)
+
-
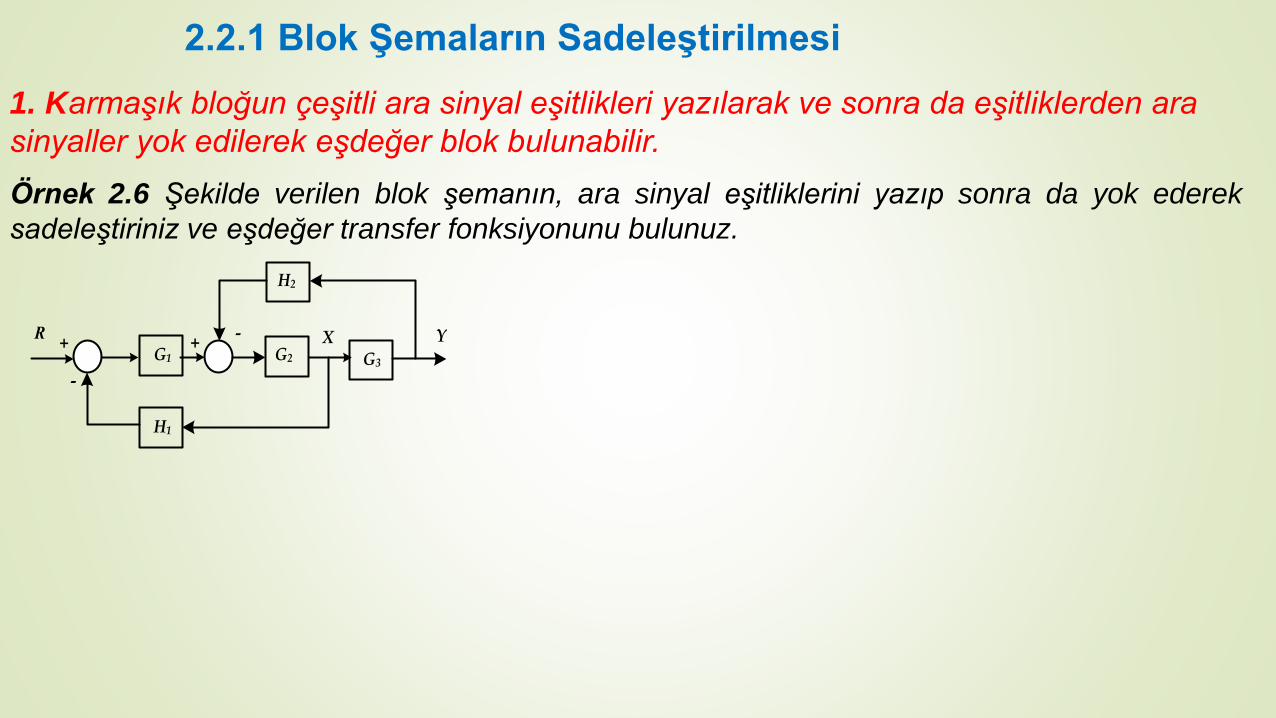
2.2.1 Blok Şemaların Sadeleştirilmesi
1. Karmaşık bloğun çeşitli ara sinyal eşitlikleri yazılarak ve sonra da eşitliklerden ara
sinyaller yok edilerek eşdeğer blok bulunabilir.
G2
R Y
G1+
-
G3
H2
H1
+
-
X
Örnek 2.6 Şekilde verilen blok şemanın, ara sinyal eşitliklerini yazıp sonra da yok ederek
sadeleştiriniz ve eşdeğer transfer fonksiyonunu bulunuz.

2. Blok şemanın toplama noktasına gelen ya da ayrılma noktasından
alınan sinyaller, blok eşitliğini bozmayacak şekilde bir bloğun
ilerisine ya da gerisine taşınarak yukarıda açıklanan standart seri,
paralel ve kapalı çevrim blok yapıları elde edilmek suretiyle
sadeleştirme yapılabilir.
Devam:
G2
R YG1
X
+
+
G2
R YG1
X
+
+
1/G1
Toplama noktasına gelen bir sinyalin taşınması
G2
R YG1
-
+G2
R YG1
-
+
G2
Ayrılma noktasından alınan bir sinyalin taşınması

Örnek 2.7 Şekilde verilen blok şemayı sadeleştirerek eşdeğer tek bir blok haline
getiriniz.

4sI(s) V(s)
2+
-
s+
-
4+
-
Örnek 2.8 Şekilde verilen blok şemayı sadeleştirerek sistemin transfer fonksiyonunu
bulunuz.
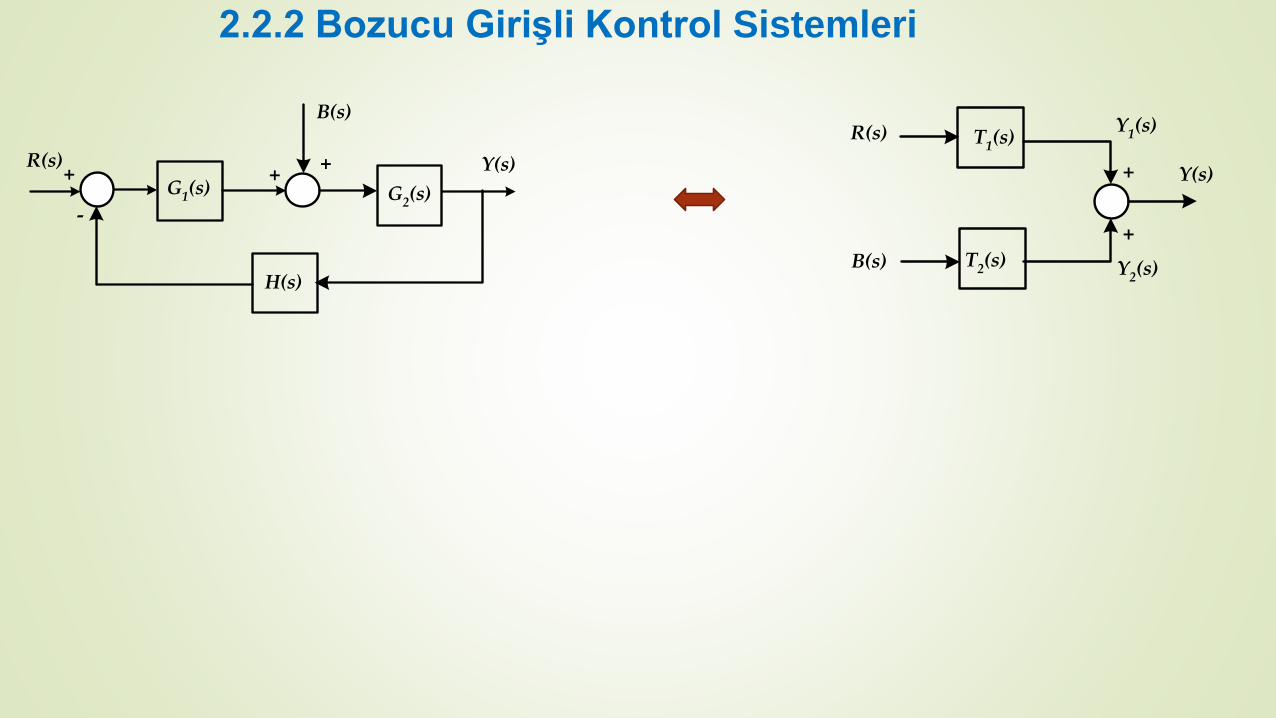
2.2.2 Bozucu Girişli Kontrol Sistemleri
G2(s)
R(s)
G1(s)+
+
H(s)
+
-
Y(s)
B(s)
T1(s)
+
+T2(s)
Y(s)
B(s)
R(s) Y1(s)
Y2(s)
Gp(s)
R(s)
Gc(s)+
+
H(s)
+
-
Y(s)
B(s)Gb(s)
+
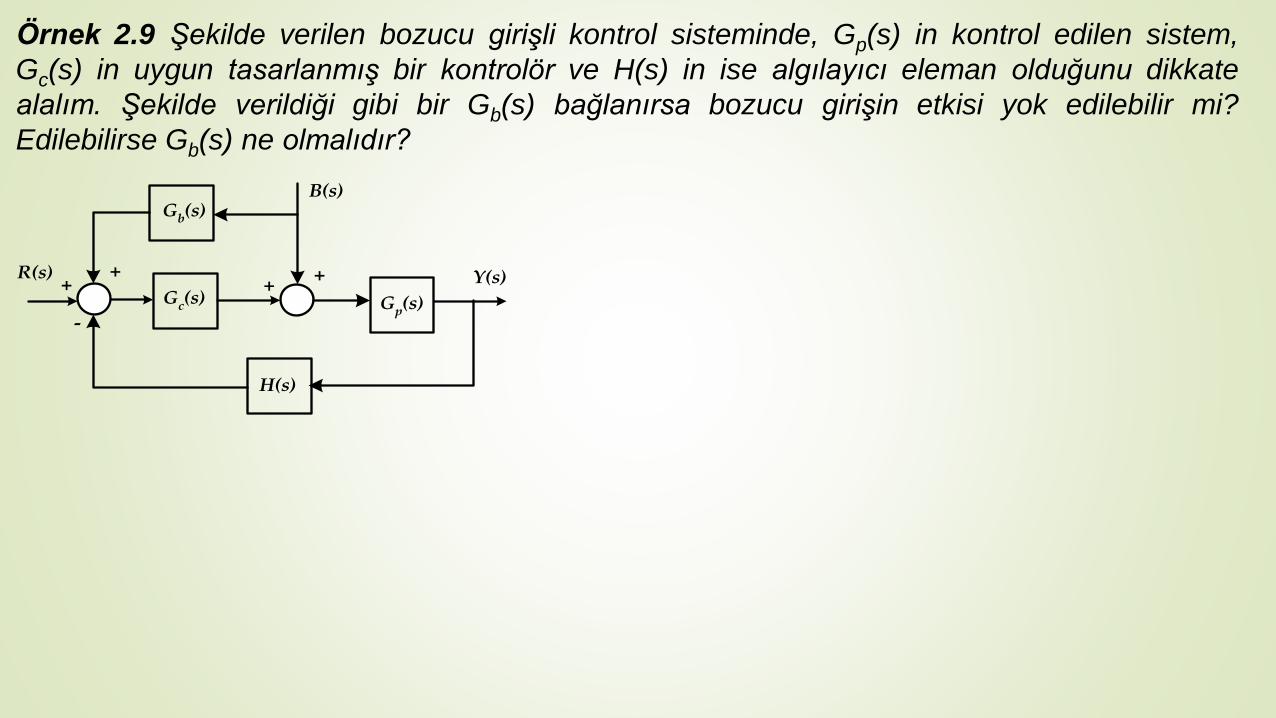
Örnek 2.9 Şekilde verilen bozucu girişli kontrol sisteminde, Gp(s) in kontrol edilen sistem,
Gc(s) in uygun tasarlanmış bir kontrolör ve H(s) in ise algılayıcı eleman olduğunu dikkate
alalım. Şekilde verildiği gibi bir Gb(s) bağlanırsa bozucu girişin etkisi yok edilebilir mi?
Edilebilirse Gb(s) ne olmalıdır?

2.3 Sinyal Akış Şemaları
R(s) E(s) Y(s)
X(s)
G(s)
H(s)
+ -
o oo oo oR(s) Y(s)E(s) G(s)
-H(s)
1 1Y(s)
Kapalı çevrim kontrol sisteminin blok şeması ve sinyal akış şeması.
Benzerlikler, farklılıklar ?
)()(
)(
)(
)()(
sHsG1
sG
sR
sYsT
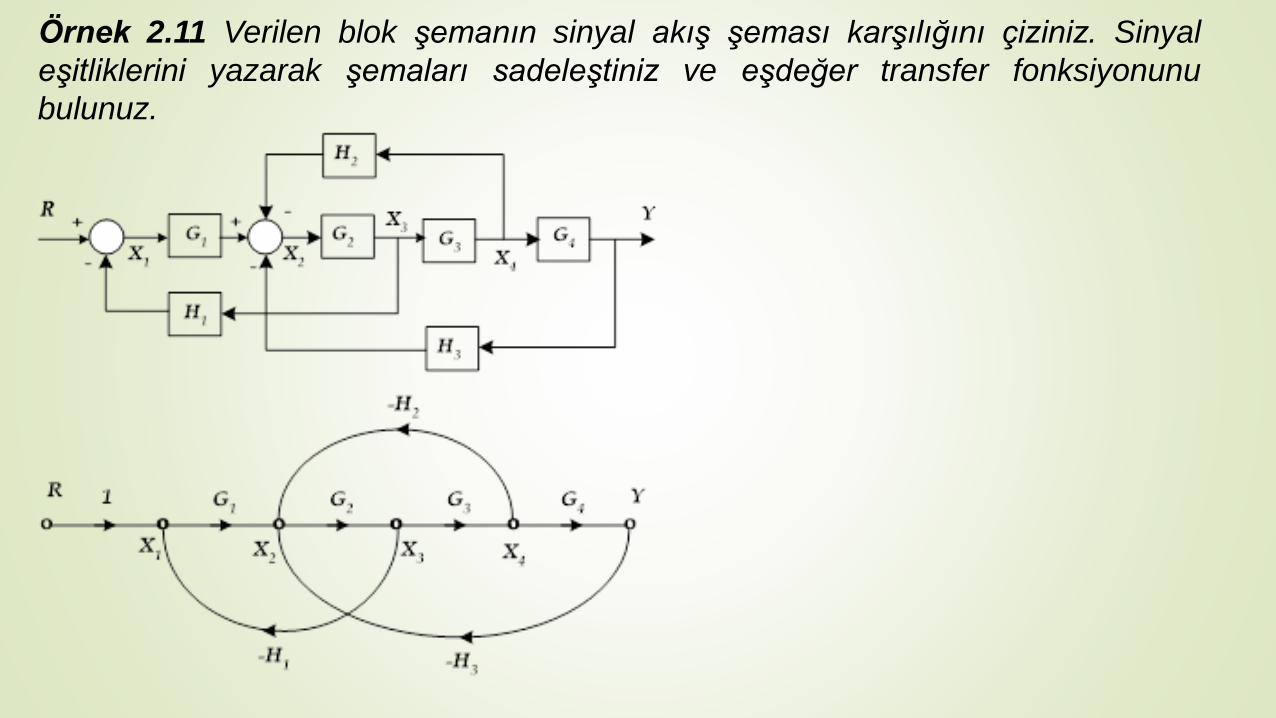
Örnek 2.11 Verilen blok şemanın sinyal akış şeması karşılığını çiziniz. Sinyal
eşitliklerini yazarak şemaları sadeleştiniz ve eşdeğer transfer fonksiyonunu
bulunuz.

2.3.1 Sinyal Akış Şemalarının Sadeleştirilmesi:
R 1 Yo oo oo oo oo o
G1 G2 G3 G4
-H1 -H2
G5
-H3
X
İleri besleme yolları ve yol kazançları ?
Çevrimler ve çevrim kazanları ?
Birbirine dokunmayan çevrimler ?
N
1k
kkT
sR
sYsT
.
)(
)()(
∆ =1-(bireysel çevrimlerin çevrim kazançlarının
toplamı) + (Birbirine dokunmayan ikişerli
çevrimlerin kazançlarının çarpımlarının toplamı)-
(Birbirine dokunmayan üçerli çevrimlerin
kazançlarının çarpımlarının toplamı)+ ....
∆k = k. ileri besleme yolu sinyal akış
şemasından çıkarıldıktan sonra geriye kalan
sinyal akış şemasının ∆ değeridir.
Kazanç Formülü

Örnek 2.13 Şekil 2.14 de verilen sinyal akış şemasında,
a-) Giriş ile Y çıkışı arasındaki,
b-) Giriş ile çıkış olarak alınan X ara düğümü arasındaki,
c-) Ara düğüm X ile Y çıkışı arasındaki eşdeğer transfer
fonksiyonunun bulunuz.
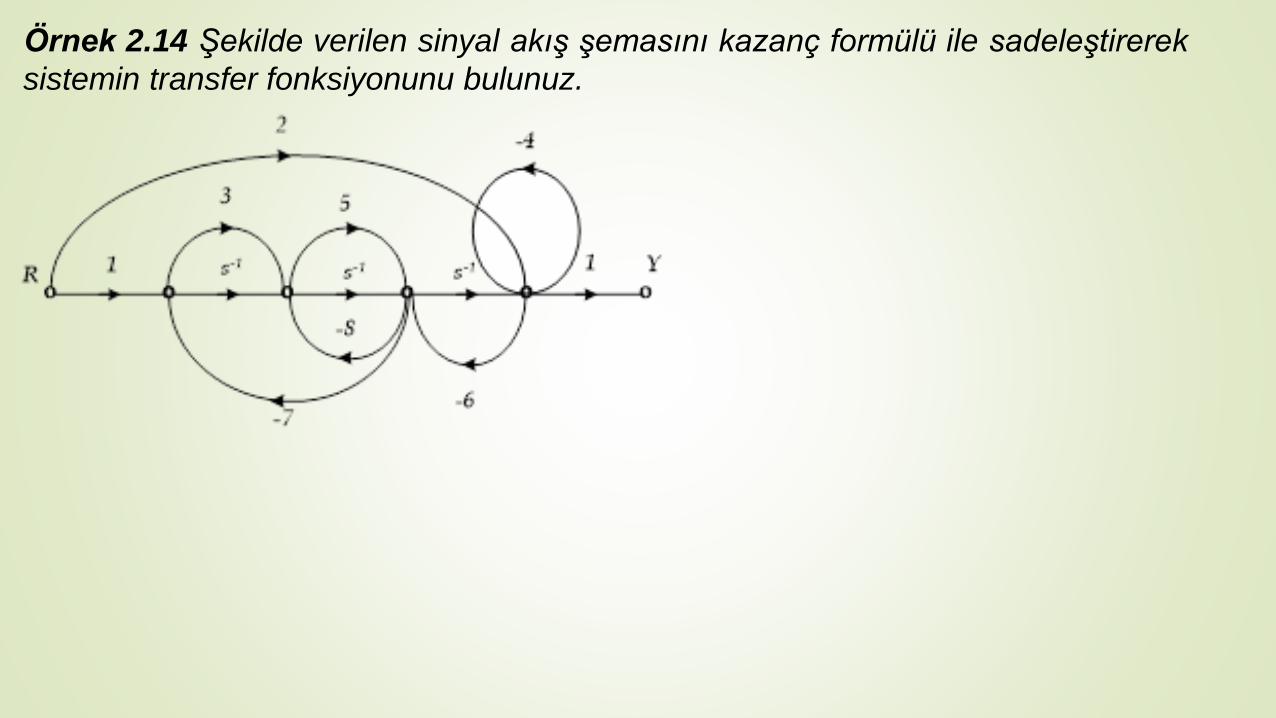
Örnek 2.14 Şekilde verilen sinyal akış şemasını kazanç formülü ile sadeleştirerek
sistemin transfer fonksiyonunu bulunuz.

2.4 Durum Diyagramları
)t(budt
)t(dx
Özel yapıdaki…! blok şema ya da sinyal akış şemalarıdır.
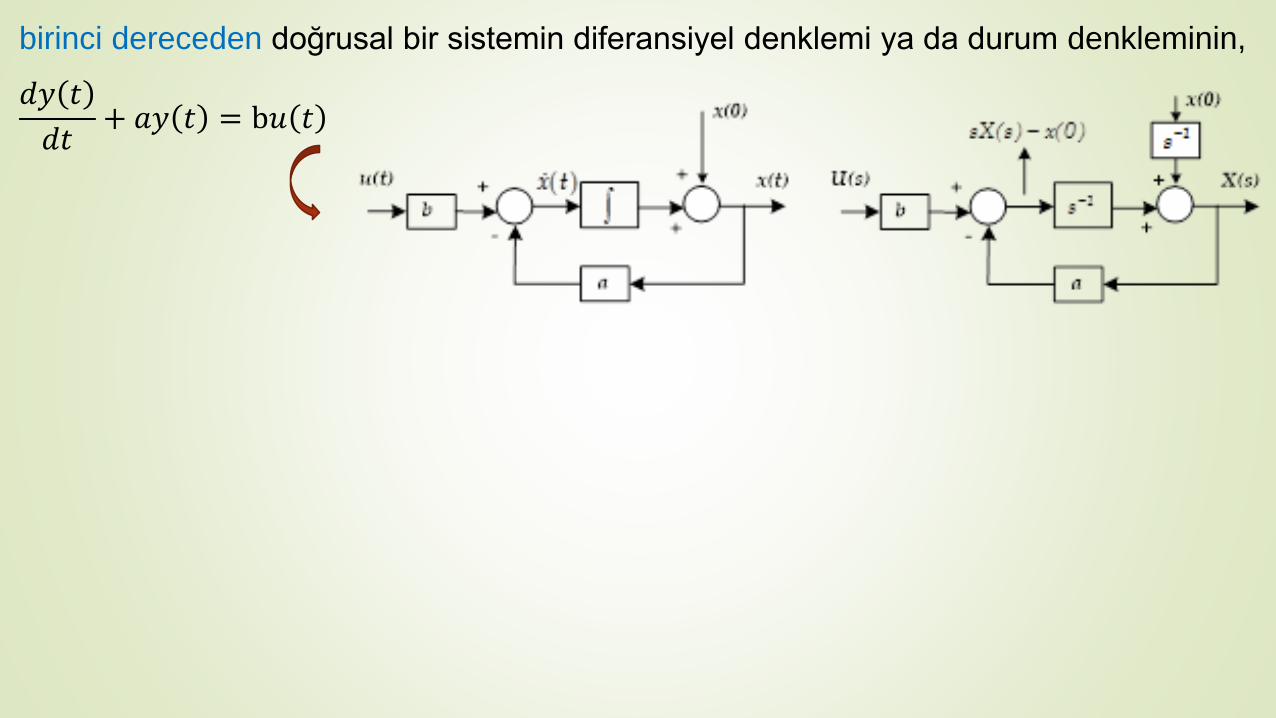
birinci dereceden doğrusal bir sistemin diferansiyel denklemi ya da durum denkleminin,
𝑑𝑦 𝑡
𝑑𝑡+ 𝑎𝑦 𝑡 = b𝑢 𝑡

Yüksek dereceden ve girişin türevlerini ihtiva etmeyen doğrusal bir sistemin diferansiyel
denklemi ve durum diyagramı. 𝑑n𝑦 𝑡
𝑑𝑡n+ 𝑎𝑛−1
𝑑n−1𝑦 𝑡
𝑑𝑡n−1+⋯+ 𝑎1
𝑑𝑦 𝑡
𝑑𝑡+ 𝑎0𝑦 𝑡 = 𝑏𝑢 𝑡
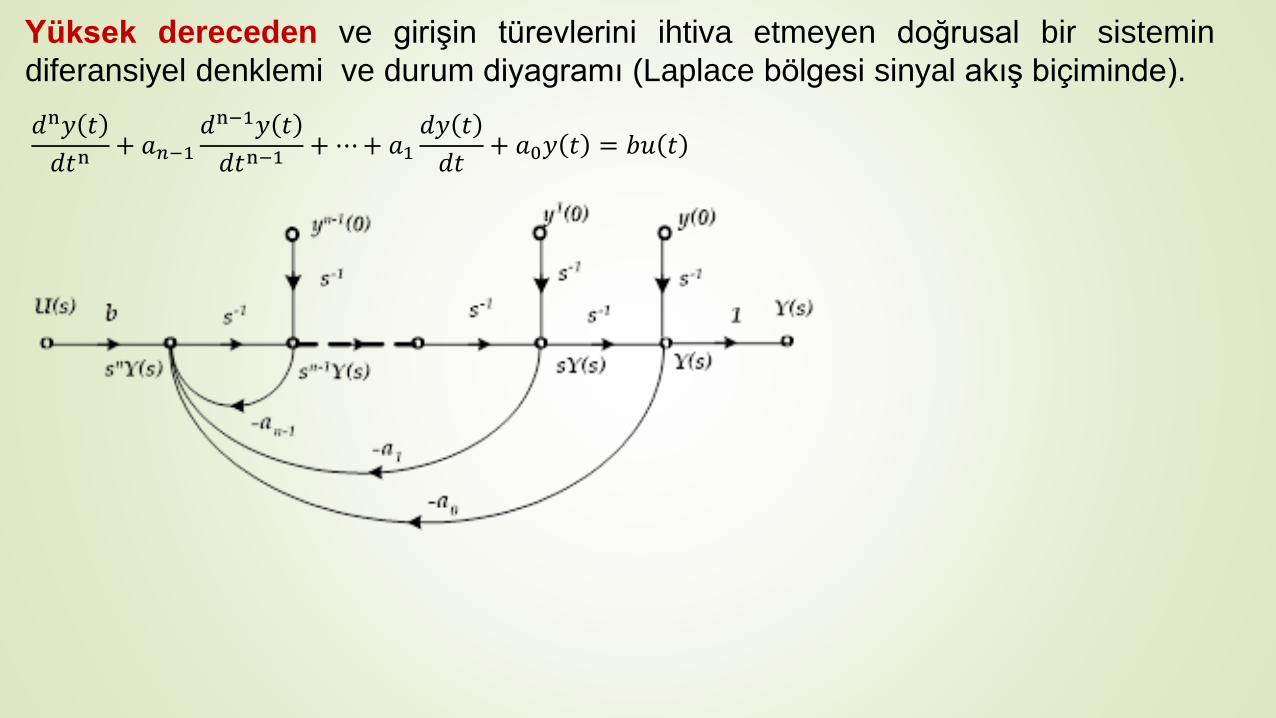
Yüksek dereceden ve girişin türevlerini ihtiva etmeyen doğrusal bir sistemin
diferansiyel denklemi ve durum diyagramı (Laplace bölgesi sinyal akış biçiminde).
𝑑n𝑦 𝑡
𝑑𝑡n+ 𝑎𝑛−1
𝑑n−1𝑦 𝑡
𝑑𝑡n−1+⋯+ 𝑎1
𝑑𝑦 𝑡
𝑑𝑡+ 𝑎0𝑦 𝑡 = 𝑏𝑢 𝑡
2.4.2 Durum Diyagramından Durum Denklemini Elde Etme
)t(u5)t(y4dt
)t(dy3
dt
)t(yd2
dt
)t(yd2
2
3
3
Örnek 2.15 Diferansiyel denklemi verilen sistemin durum diyagramını çizerek durum
denklemlerini yazınız. Başlangıç koşulları sıfır alınmıştır.
2.4.3 Transfer Fonksiyonlarının Durum Diyagramı
Kanonik gerçekleme
Örnek 2.16 Verilen transfer fonksiyonunun kontrol edilebilir kanonik formda durum
diyagramını çizerek durum denklemini çıkarınız.
1s3s2s
4s
sU
sYsG
23
)(
)()(

U Y
1o oo o
-c
o os-1 b
a
U Y
1o oo o
-c
s-1
o
a
U
Y
1o o o oo o
s-1 5
-2 -4
3
o os-1
x2 x1
2x1x
cs
as
sU
sYsG
)(
)()(
Örnek 2.18 Aşağıda verilen a-) birinci dereceden ve b-) ikinci dereceden transfer
fonksiyonlarının örnek 2.16’yı dikkate alarak doğrudan durum diyagramlarını çiziniz.
cs
bas
sU
sYsG
)(
)()(
4s2s
5s3
sU
sYsG
2
)(
)()(
Seri (kaskat) gerçekleme
Örnek 2.19 Basit çarpanlarına ayrılmış halde verilen transfer fonksiyonunun durum
diyagramını çizerek durum denklemini çıkarınız.
))()((
)(
)(
)()(
3s2s1s
2ss
sU
sYsG
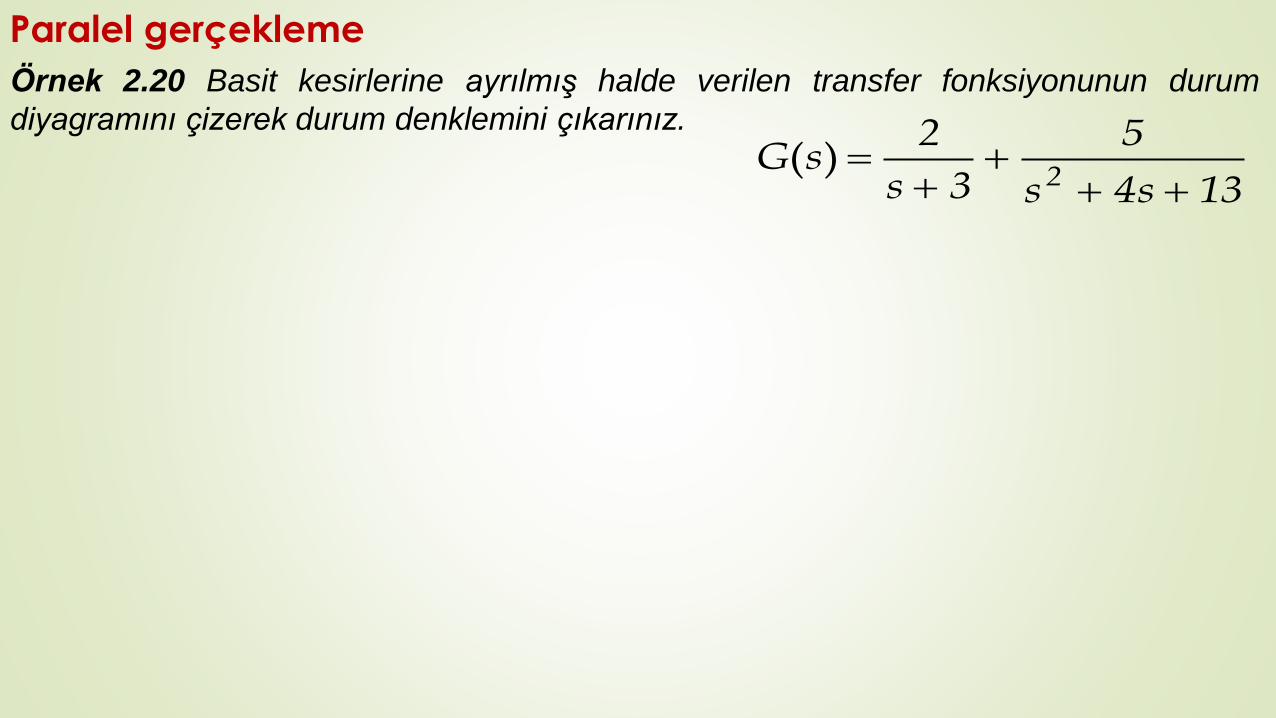
Paralel gerçekleme
Örnek 2.20 Basit kesirlerine ayrılmış halde verilen transfer fonksiyonunun durum
diyagramını çizerek durum denklemini çıkarınız.
13s4s
5
3s
2sG
2
)(
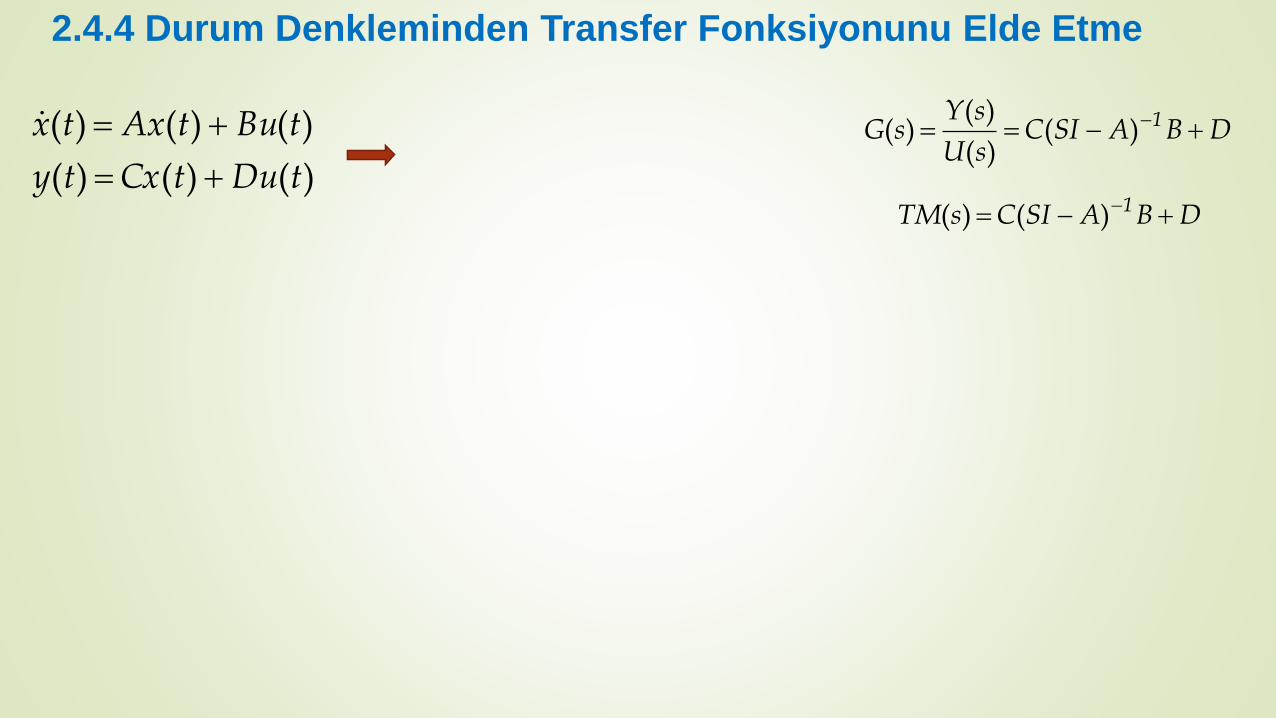
2.4.4 Durum Denkleminden Transfer Fonksiyonunu Elde Etme
)()()(
)()()(
tDutCxty
tButAxtx
DBASICsU
sYsG 1 )(
)(
)()(
DBASICsTM 1 )()(
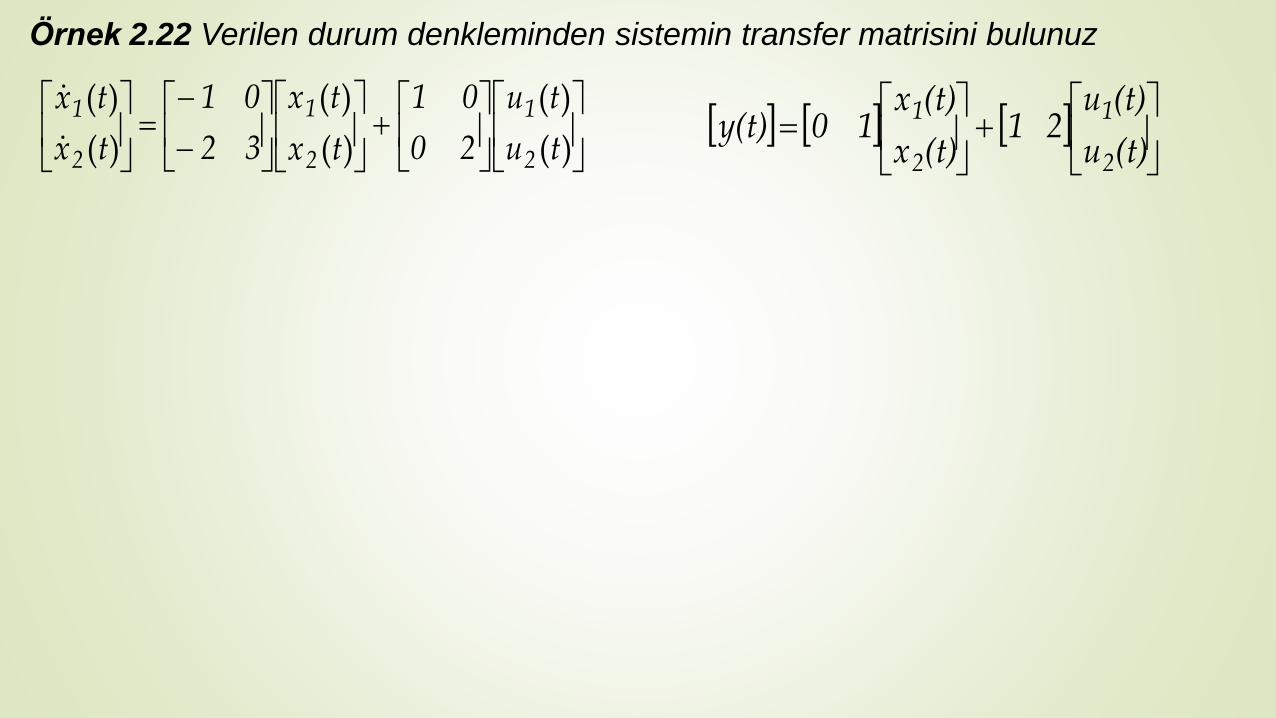
Örnek 2.22 Verilen durum denkleminden sistemin transfer matrisini bulunuz
)(
)(
)(
)(
)(
)(
tu
tu
2
0
0
1
tx
tx
32
01
tx
tx
2
1
2
1
2
1
(t)u
(t)u21
(t)x
(t)x10y(t)
2
1
2
1

)()(
)(
)(
)(tu
2
0
tx
tx
32
41
tx
tx
2
1
2
1
)()( tu7
(t)x
(t)x65ty
2
1
Örnek 2.23 Verilen durum denkleminin durum diyagramını çizerek transfer fonksiyonunu
bulunuz.

)(..)()(
)(...)()(
tubdt
tudb
dt
tudbtya
dt
tyda
dt
tyd01m
1m
1mm
m
m01n
1n
1nn
n
011n
1nn
011m
1mm
m
asasas
bsbsbsb
sU
sYsG
.........
.........
)(
)()(
)()()(
)()()(
tDutCxty
tButAxtx
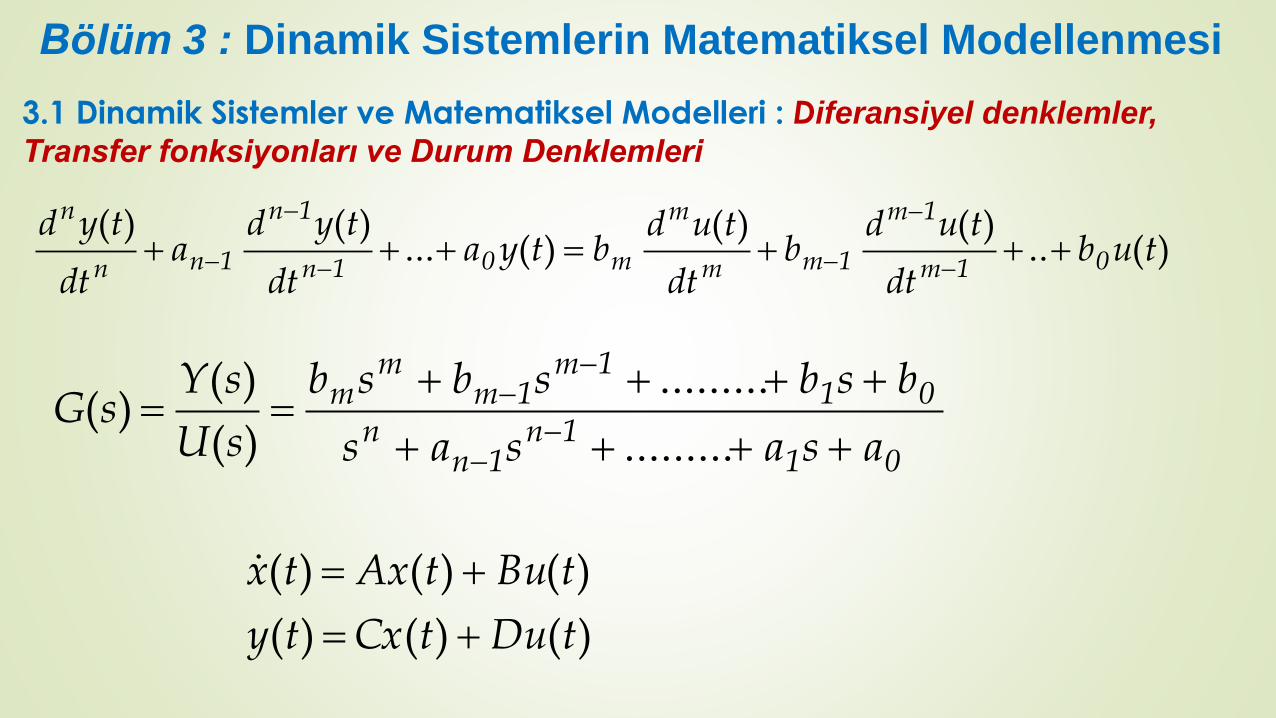
Bölüm 3 : Dinamik Sistemlerin Matematiksel Modellenmesi
3.1 Dinamik Sistemler ve Matematiksel Modelleri : Diferansiyel denklemler,
Transfer fonksiyonları ve Durum Denklemleri
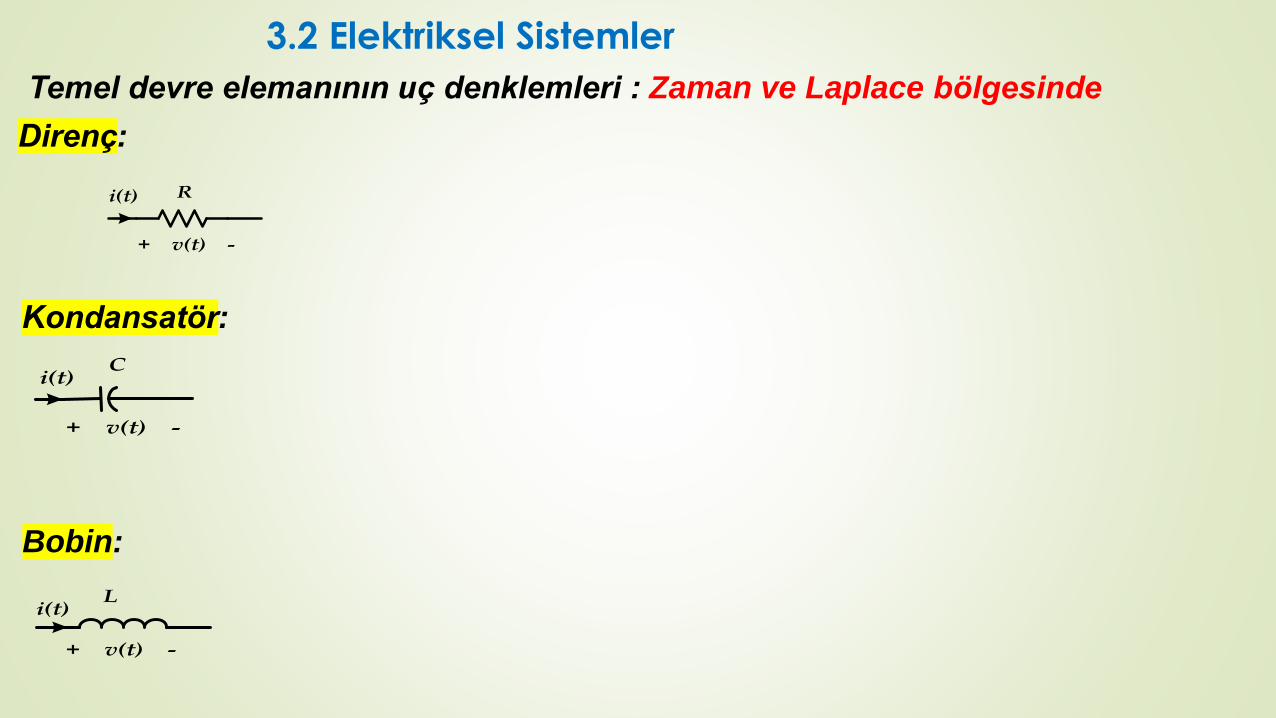
Temel devre elemanının uç denklemleri : Zaman ve Laplace bölgesinde
3.2 Elektriksel Sistemler
Direnç:
Kondansatör:
Bobin:
Ri(t)
+ v(t) -
Ci(t)
+ v(t) -
Li(t)
+ v(t) -

3.2.1 Elektriksel Sistemlerin Modellenmesi
İki önemli yasa:
Çevre Akımları Yöntemi: Yönleri arzu edildiği gibi seçilen çevre
akımları cinsinden yazılmak üzere kapalı bir çevredeki gerilimlerin
cebirsel toplamı sıfırdır.
Düğüm Gerilimleri Yöntemi: Seçilen bir ortak düğüme göre
belirlenen düğüm gerilimleri cinsinden yazılmak üzere bir düğüm
noktasındaki akımların cebirsel toplamı sıfırdır.
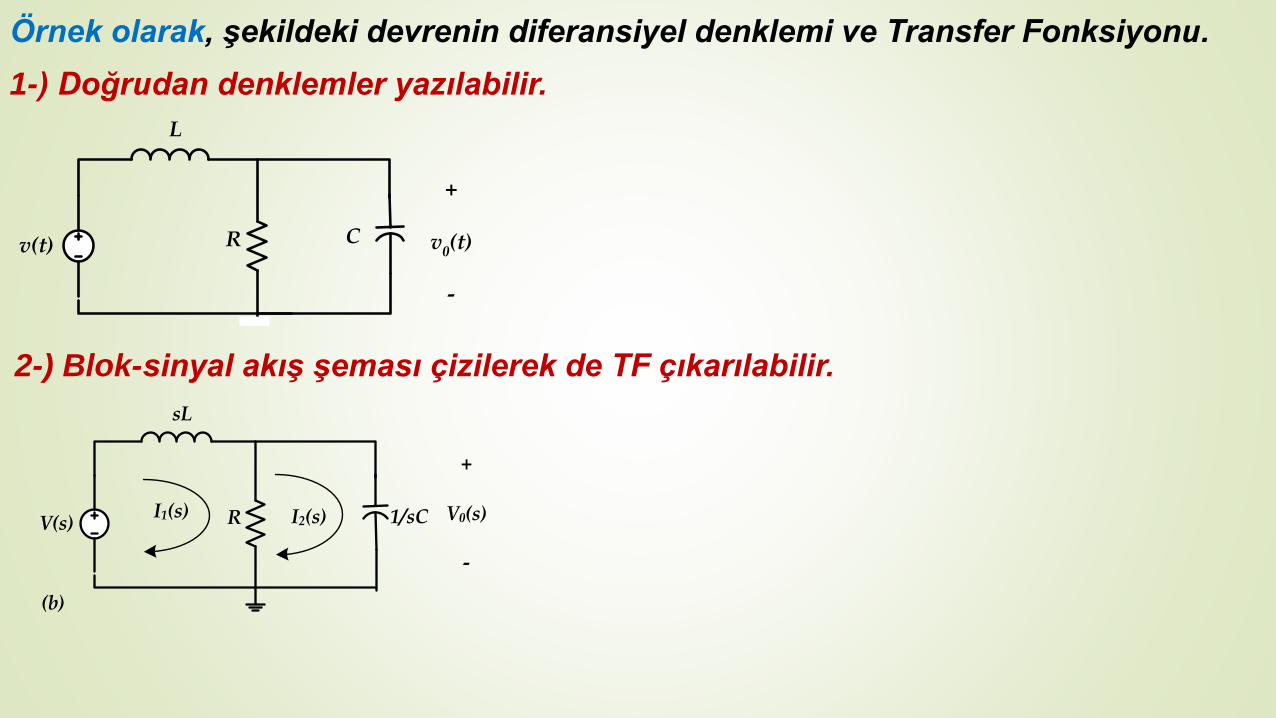
Örnek olarak, şekildeki devrenin diferansiyel denklemi ve Transfer Fonksiyonu.
R C
L
+
v0(t)
-
v(t)
R 1/sC
sL
+
V0(s)
-
V(s)I1(s) I2(s)
(b)
1-) Doğrudan denklemler yazılabilir.
2-) Blok-sinyal akış şeması çizilerek de TF çıkarılabilir.
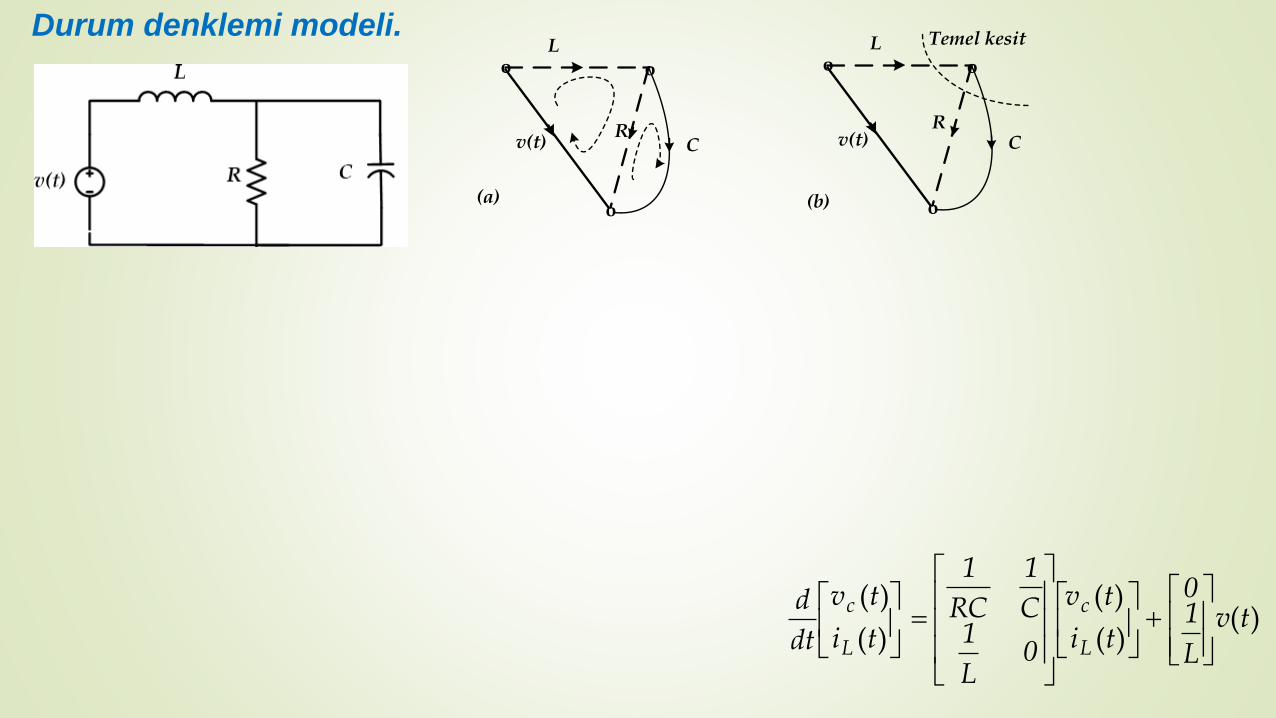
Durum denklemi modeli.o o
o
v(t) CR
Lo o
o
v(t) CR
L
(a) (b)
Temel kesit
)()(
)(
)(
)(tv
L
10
ti
tv
0L
1C
1
RC
1
ti
tv
dt
d
L
c
L
c
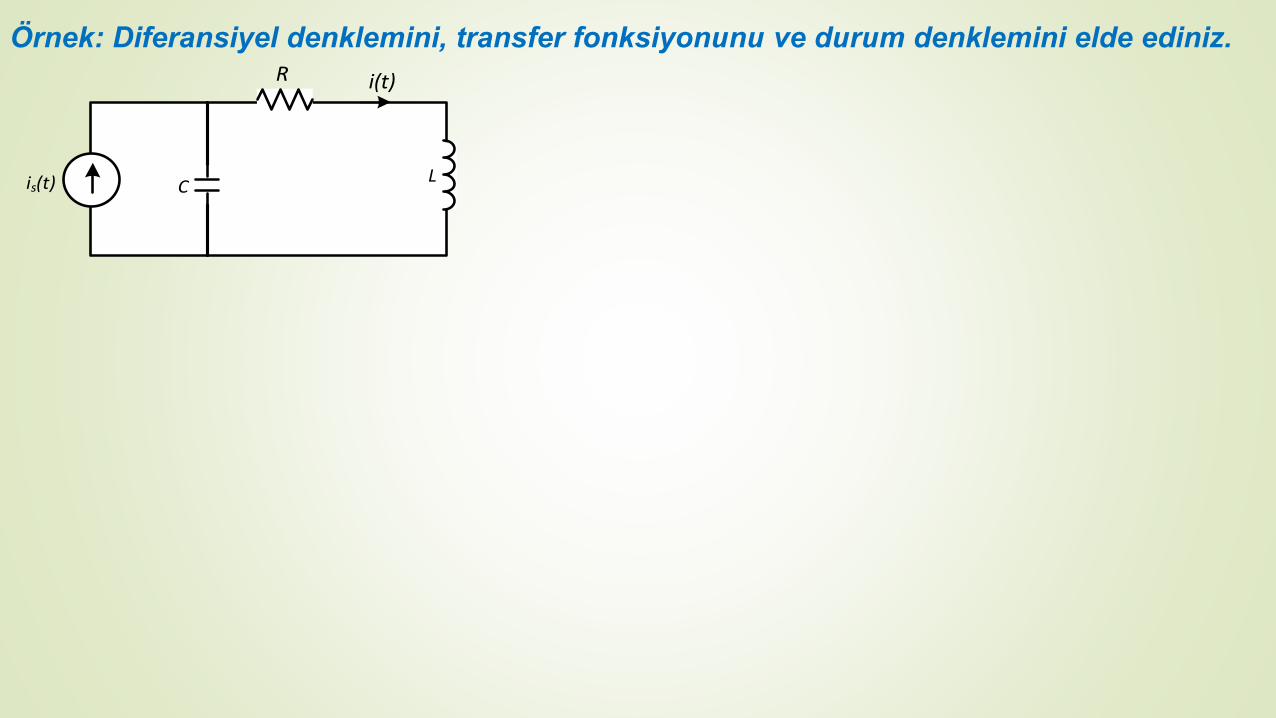
Lis(t) C
R i(t)
Örnek: Diferansiyel denklemini, transfer fonksiyonunu ve durum denklemini elde ediniz.
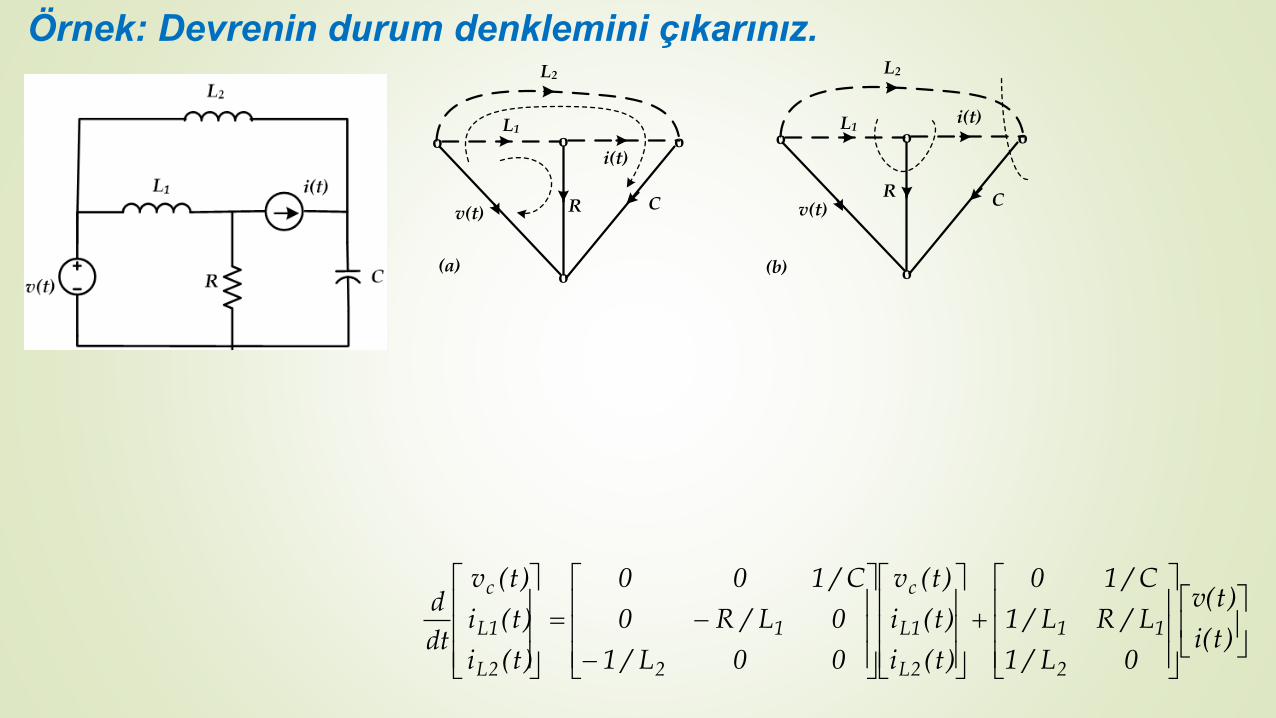
Örnek: Devrenin durum denklemini çıkarınız.
o o
o
v(t)CR
L1o
L2
i(t)o o
o
v(t)CR
L1o
L2
i(t)
(a) (b)
)t(i
)t(v
0L/1
L/RL/1
C/10
)t(i
)t(i
)t(v
00L/1
0L/R0
C/100
)t(i
)t(i
)t(v
dt
d
2
11
2L
1L
c
2
1
2L
1L
c
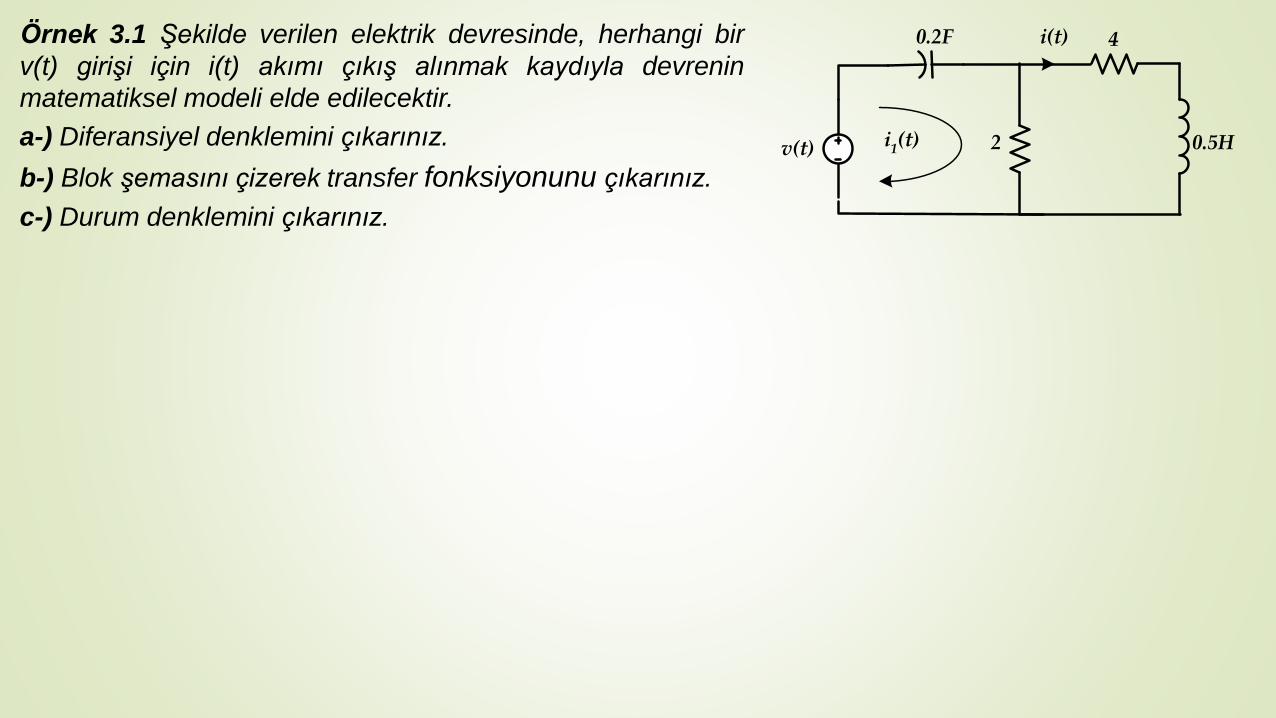
Örnek 3.1 Şekilde verilen elektrik devresinde, herhangi bir
v(t) girişi için i(t) akımı çıkış alınmak kaydıyla devrenin
matematiksel modeli elde edilecektir.
a-) Diferansiyel denklemini çıkarınız.
b-) Blok şemasını çizerek transfer fonksiyonunu çıkarınız.
c-) Durum denklemini çıkarınız.
2
0.2F
0.5Hv(t)
4i(t)
i1(t)
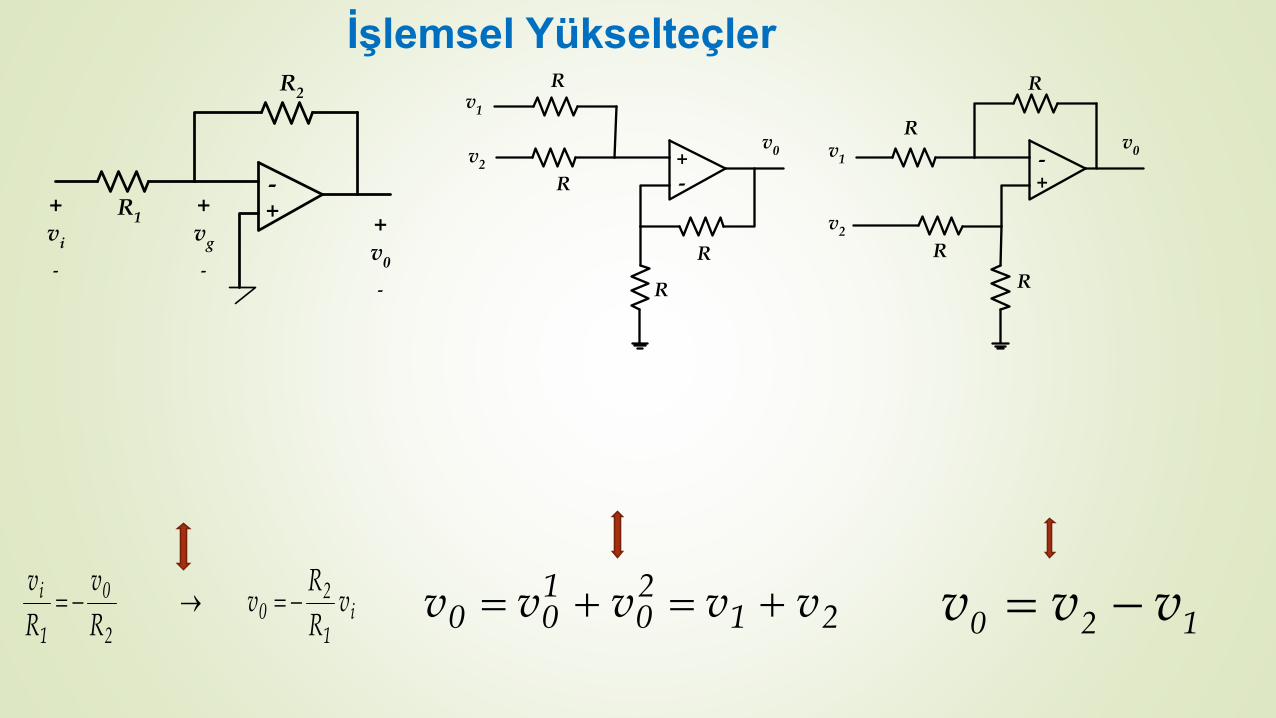
İşlemsel Yükselteçler
+v0
-
-+
R2
R1+vi
-
+vg
-
v0+-R
R
v2
v1
R
R
v0-+
R
R
v2
v1
R
R
2120
100 vvvvv
120 vvv i1
20
2
0
1
i vR
Rv
R
v
R
v

v0
-+
R2
R1
vi
-+
Ci
Ri
-+
Rd
Cd
-+
Ra
Rb
Rb
Rb
P
I
D
İşlemsel yükselteçlerle PID kontrolör
)vdt
dCRdtv
CR
1v
R
R(
R
Rv iddi
ii
i
1
2
b
a0

3.3 Mekanik Sistemler
3.3.1 Doğrusal Mekanik Sistemler
m
x(t)
f(t)
2
2
mdt
)t(xdm
dt
)t(dvm)t(am)t(f)t(f 3.36
Kütle: ve bobin-kondansatör benzerliği

k
x(t)
f(t)
x0(t)=0
dt)t(vk)t(kx)t(f)t(f k 3.37
Yay: ve bobin-kondansatör benzerliği
x(t)
f(t)
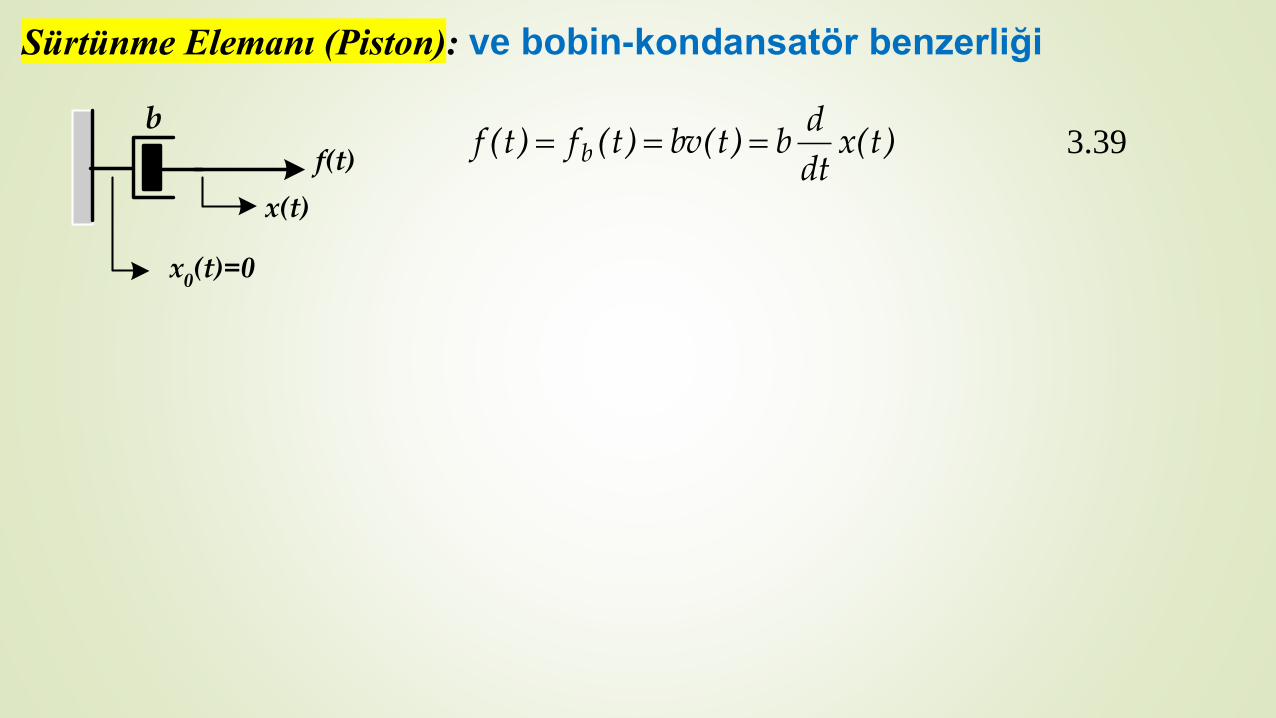
b
x0(t)=0
)t(xdt
db)t(bv)t(f)t(f b 3.39
Sürtünme Elemanı (Piston): ve bobin-kondansatör benzerliği
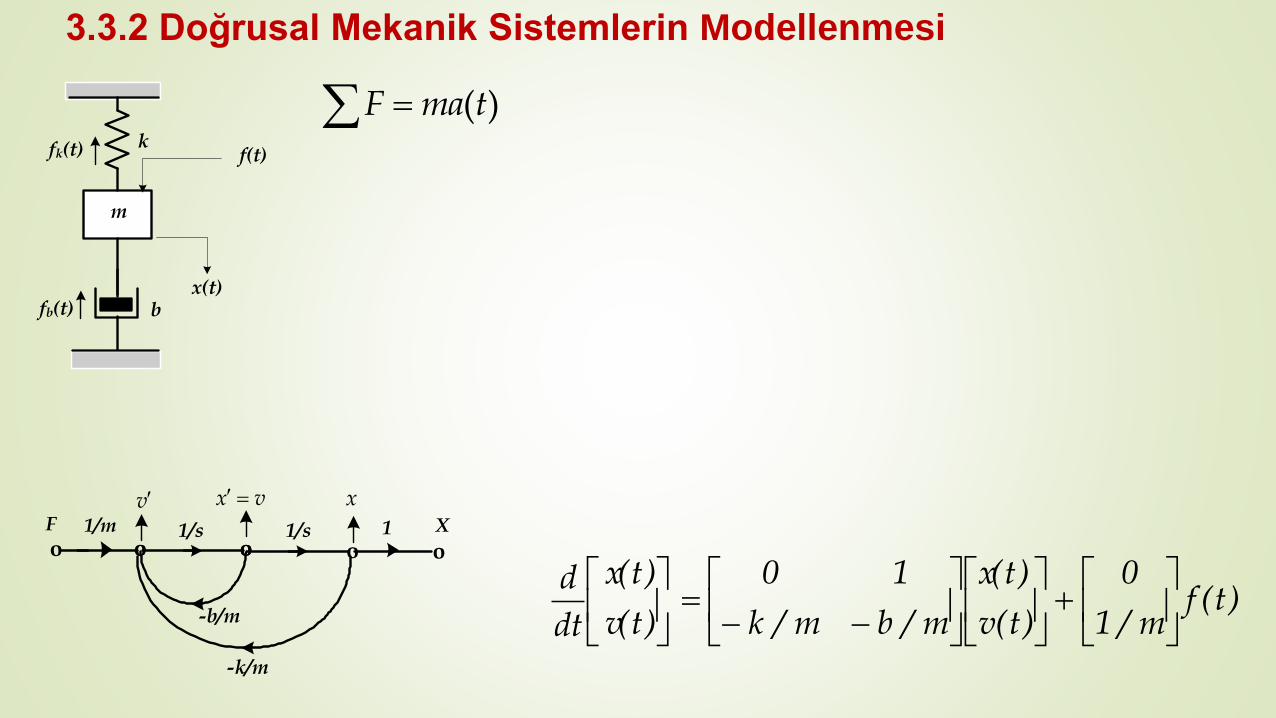
3.3.2 Doğrusal Mekanik Sistemlerin Modellenmesi
k
x(t)b
m
f(t)fk(t)
fb(t)
F Xo oo oo o
-k/m
1/s1/so
1
-b/m
1/mv vx x
)t(fm/1
0
)t(v
)t(x
m/bm/k
10
)t(v
)t(x
dt
d
)(tmaF
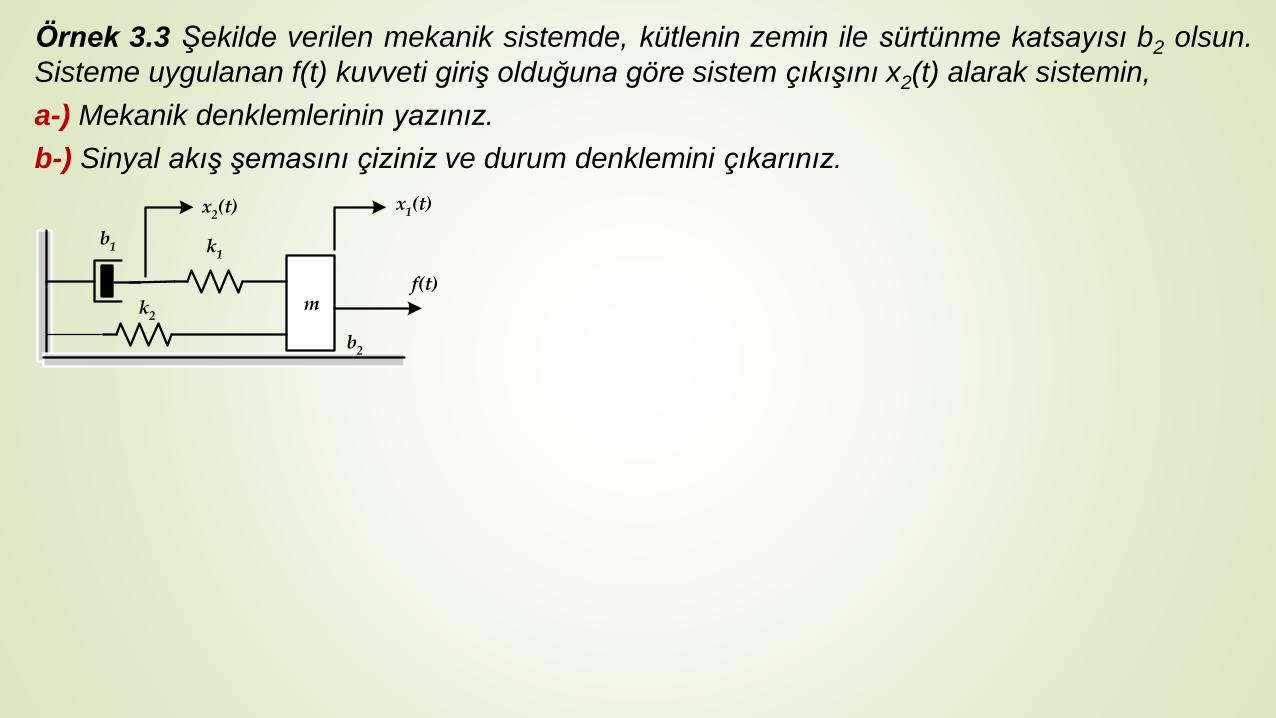
k1
x1(t)
b1
f(t)mk2
x2(t)
b2
Örnek 3.3 Şekilde verilen mekanik sistemde, kütlenin zemin ile sürtünme katsayısı b2 olsun.
Sisteme uygulanan f(t) kuvveti giriş olduğuna göre sistem çıkışını x2(t) alarak sistemin,
a-) Mekanik denklemlerinin yazınız.
b-) Sinyal akış şemasını çiziniz ve durum denklemini çıkarınız.
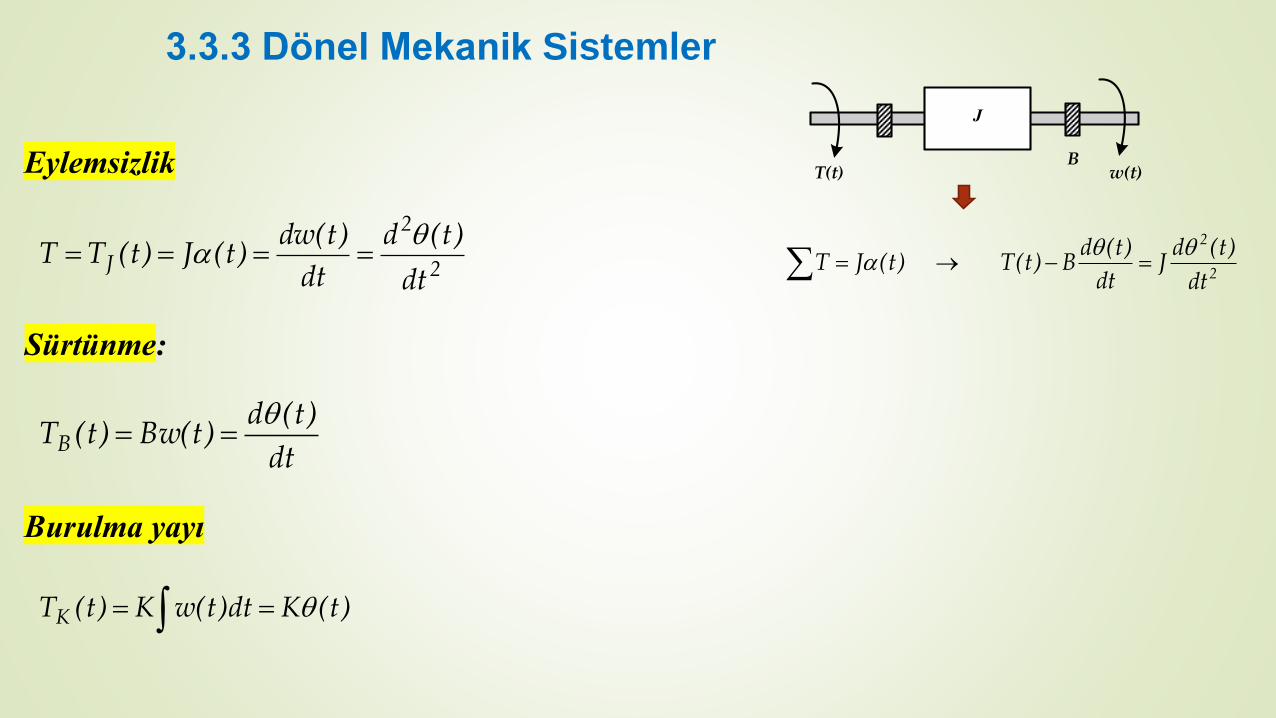
3.3.3 Dönel Mekanik Sistemler
T(t)
J
Bw(t)Eylemsizlik
Sürtünme:
2
2
Jdt
)t(d
dt
)t(dw)t(J)t(TT
dt
)t(d)t(Bw)t(TB
Burulma yayı
)t(Kdt)t(wK)t(TK
2
2
dt
)t(dJ
dt
)t(dB)t(T)t(JT

2
2
dt
)t(dJ)t(K
dt
)t(dBT
)t(JT
Dönel Mekanik Sistemlerin Modellenmesi
T(t) (t) ,w(t)
J
B K
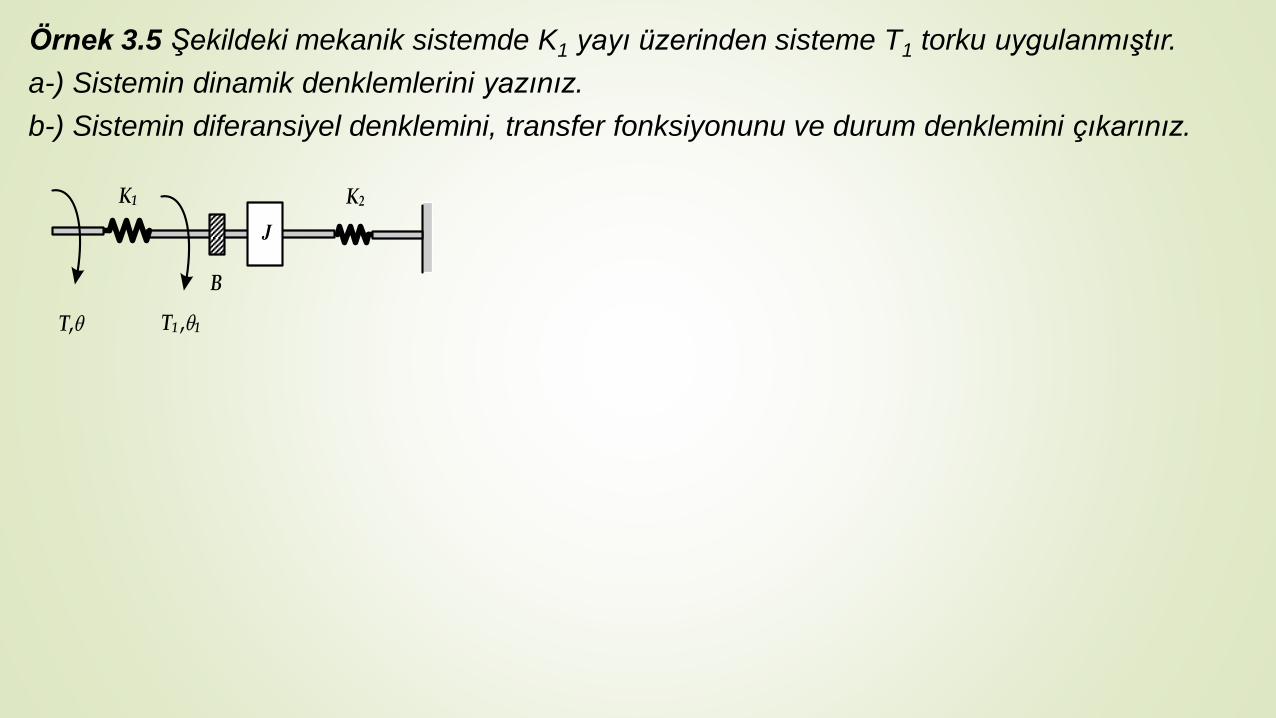
T1 ,1
J
B
K1 K2
T,
Örnek 3.5 Şekildeki mekanik sistemde K1 yayı üzerinden sisteme T1 torku uygulanmıştır.
a-) Sistemin dinamik denklemlerini yazınız.
b-) Sistemin diferansiyel denklemini, transfer fonksiyonunu ve durum denklemini çıkarınız.

3.3.4 Dişli ve Kasnak Düzenekleri
J2
B2
J1
B1
N1
T1 w1
N2
w2T2
r1
r2
T1w1
T2 w2
(a) (b)
1
2
1
2
2
1
w
w
T
Tn
22
1e
22
1e
JnJJ
BnBB
𝒏 =𝑵𝟏
𝑵𝟐ya da 𝒏 =
𝒓𝟏
𝒓𝟐Dönüştürme oranı

Örnek 3.7 Dönüştürme oranı n=1:10 olarak verilen
Şekil 3.21’deki mekanik sisteme t=0 anında T1=10 Nm
basamak giriş torku uygulanmıştır. Birinci ve ikinci
tarafın hızını ve torkunu bulunuz. Sistemin
parametreleri:2
22
121 kgm5J,kgm2.0J,s/rad/Nm5.0B,s/rad/Nm02.0B
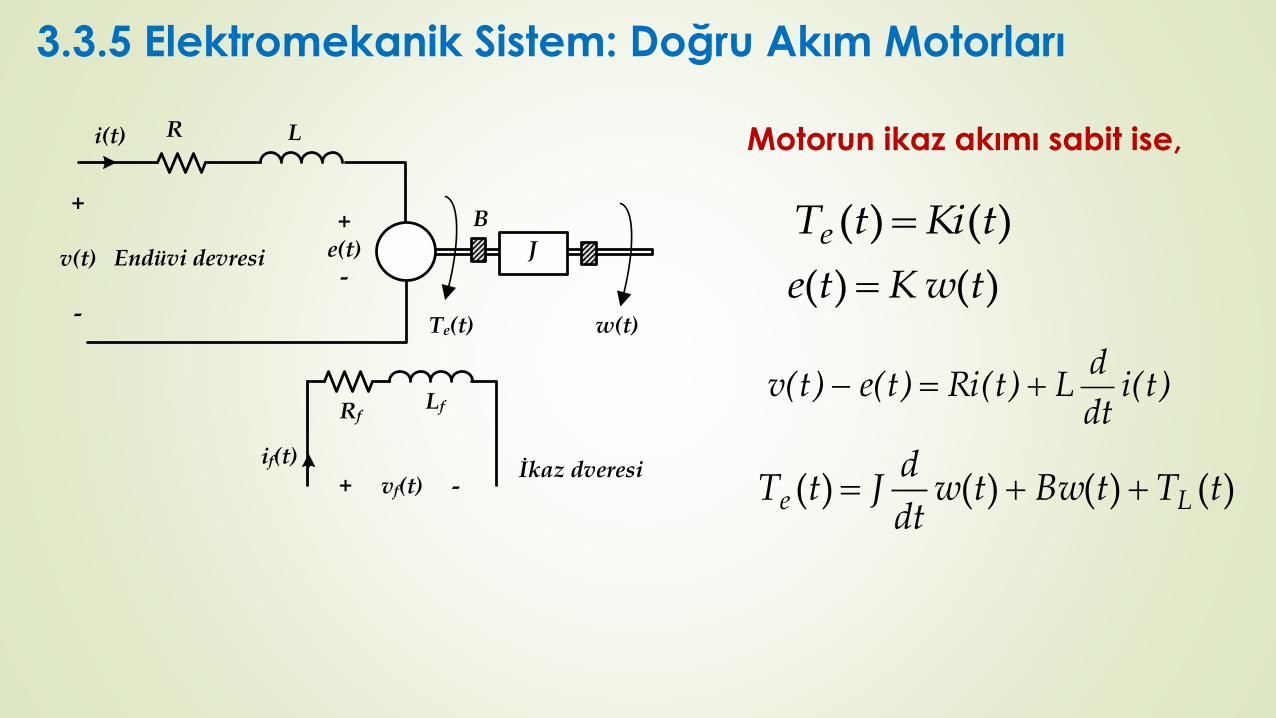
3.3.5 Elektromekanik Sistem: Doğru Akım Motorları
B
J
Te(t) w(t)
+
v(t)
-
i(t) R L
+e(t)
-
+ vf(t) -
if(t)
RfLf
Endüvi devresi
İkaz dveresi
)t(idt
dL)t(Ri)t(e)t(v
)()()()( tTtBwtwdt
dJtT Le
)()( tKitTe
)()( twKte
Motorun ikaz akımı sabit ise,

3.3.6 Doğru Akım Motorunun Matematiksel Modeli
Endüvi Gerilimine Göre Transfer Fonksiyonu: Motorun ikaz akımı sabit
Denklemlerin Laplace dönüşümü alınarak,
V(s)+
-
-+
RsL
1
BJs
1
TL(s)
K
KTe(s)
(s)
I(s) s
1 (s)
}K)BJs)(RsL{(s
K
)s(V
)s()s(G
2
2
L
LK)BJs)(RsL(
RsL
)s(T
)s()s(G
)t(idt
dL)t(Ri)t(e)t(v
)()()()( tTtBwtwdt
dJtT Le
)()( tKitTe
)()( twKte
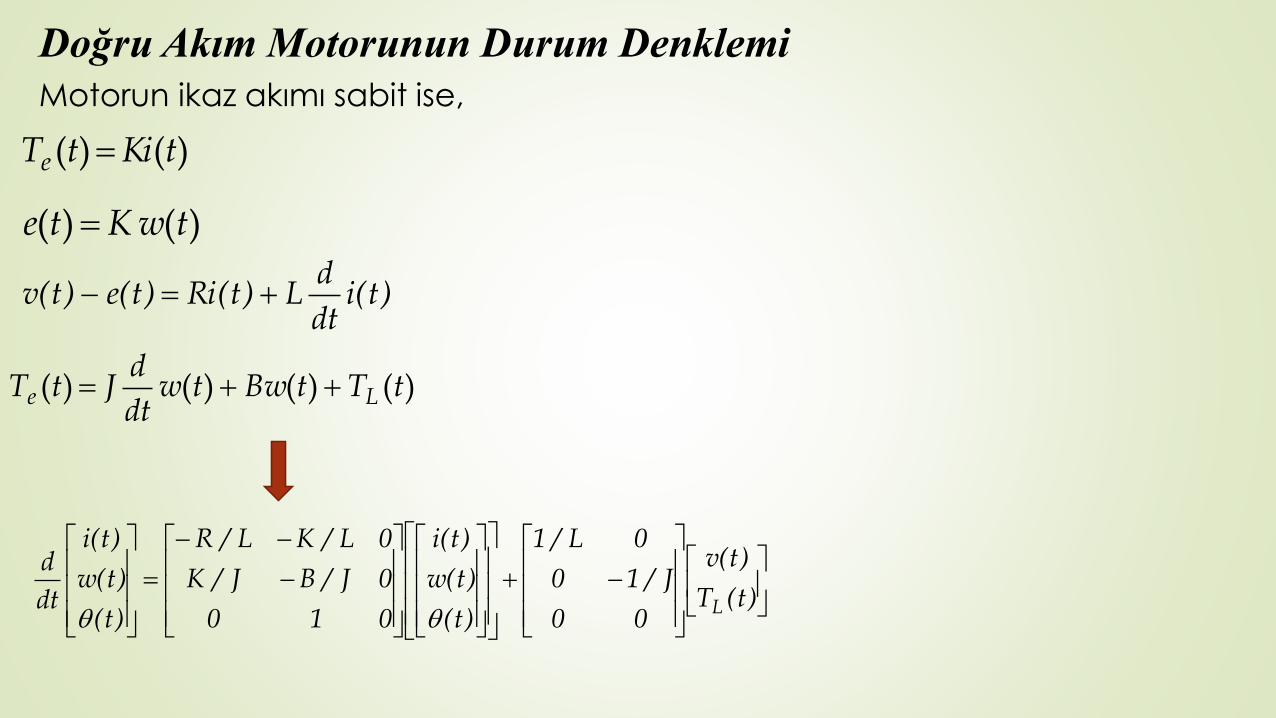
Doğru Akım Motorunun Durum Denklemi
)t(T
)t(v
00
J/10
0L/1
)t(
)t(w
)t(i
010
0J/BJ/K
0L/KL/R
)t(
)t(w
)t(i
dt
d
L
Motorun ikaz akımı sabit ise,
)t(idt
dL)t(Ri)t(e)t(v
)()()()( tTtBwtwdt
dJtT Le
)()( tKitTe
)()( twKte
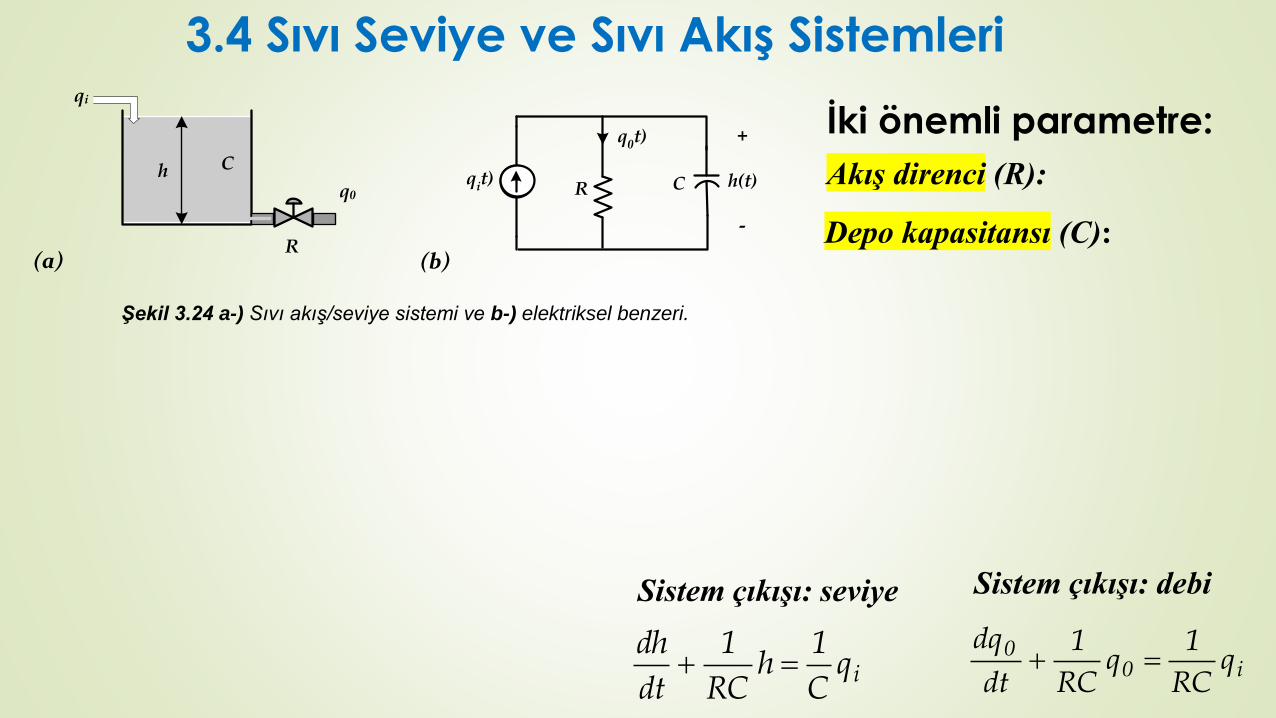
3.4 Sıvı Seviye ve Sıvı Akış Sistemleri
(a)
qi
q0
h C
R
(b)
R Cqit)
q0t) +
h(t)
-
Şekil 3.24 a-) Sıvı akış/seviye sistemi ve b-) elektriksel benzeri.
Akış direnci (R):
Depo kapasitansı (C):
iqC
1h
RC
1
dt
dh i0
0 qRC
1q
RC
1
dt
dq
İki önemli parametre:
Sistem çıkışı: debi Sistem çıkışı: seviye
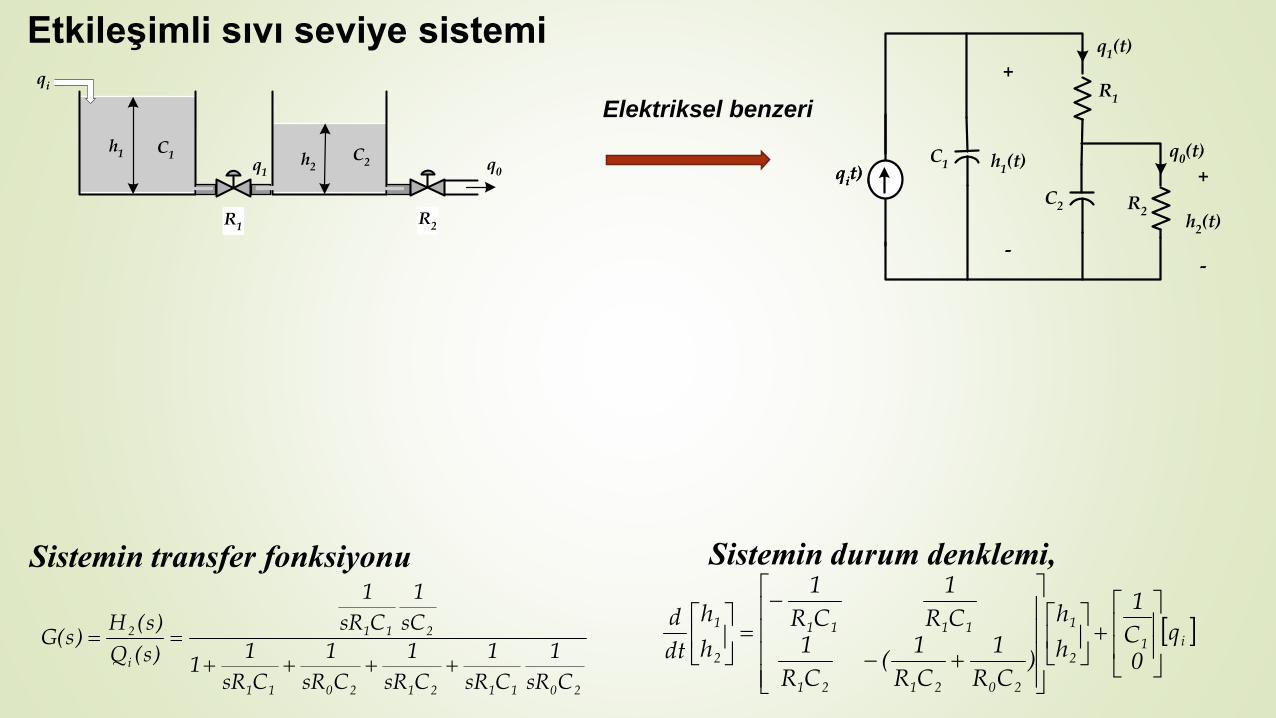
Etkileşimli sıvı seviye sistemiqi
q0
h1
R1
h2q1
R2
C1 C2
R2C2
qit)
q1(t)
+
h2(t)
-
R1
C1qit)
q0(t)
+
h1(t)
-
Elektriksel benzeri
2011212011
211
i
2
CsR
1
CsR
1
CsR
1
CsR
1
CsR
11
sC
1
CsR
1
)s(Q
)s(H)s(G
i12
1
202121
1111
2
1q
0C
1
h
h
)CR
1
CR
1(
CR
1CR
1
CR
1
h
h
dt
d
Sistemin durum denklemi,Sistemin transfer fonksiyonu


R(s) E(s) Y(s)+
-s
1
Birim İmpuls Cevabı
0
0x
jw
y(t)
t(s)
/1s
(a) (b)
t
e1
ty
)(
Bölüm 4: Kontrol Sistemlerinin Zaman Bölgesi Karakteristikleri
4.1 Birinci Dereceden Kontrol Sistemleri
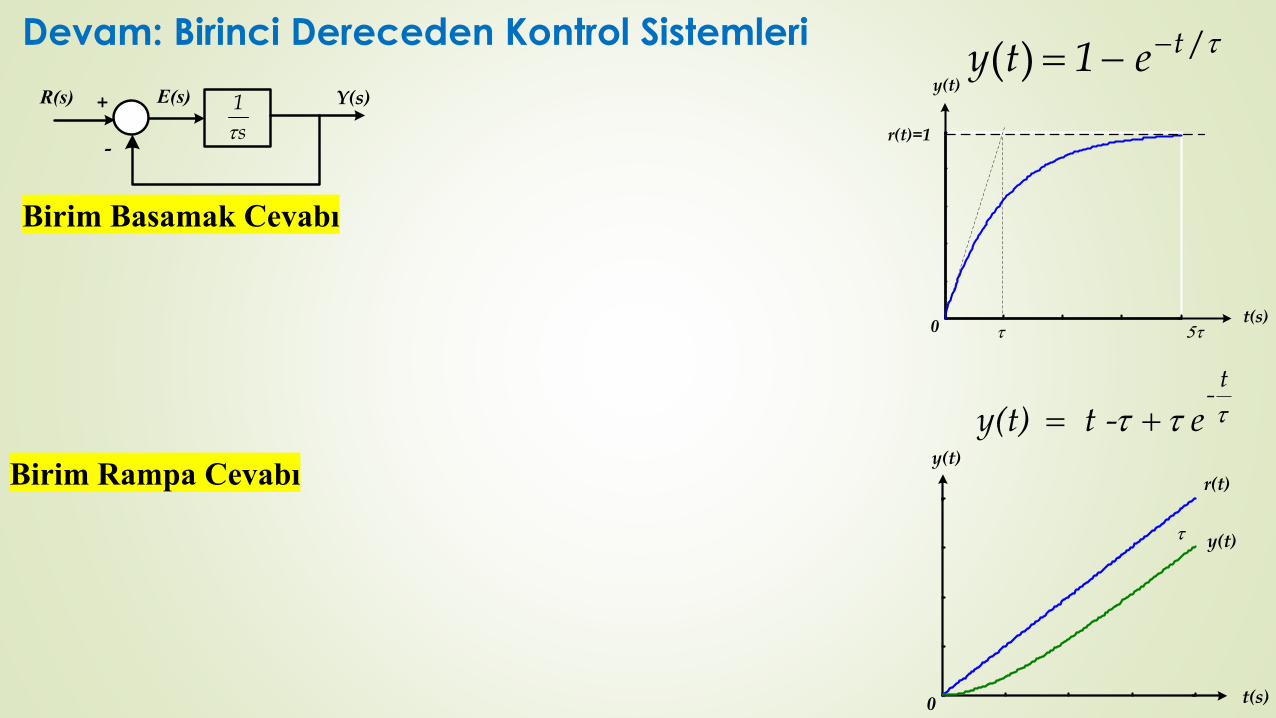
Birim Basamak Cevabı
/)( te1ty
y(t)
t(s)0
r(t)=1
Birim Rampa Cevabı
t-
e t -y(t)
y(t)
t(s)0
y(t)
r(t)
Devam: Birinci Dereceden Kontrol Sistemleri
R(s) E(s) Y(s)+
-s
1

R(s) E(s) Y(s)+
-)s(G
1s
4sG
)(
Örnek 4.1 Şekilde verilen birim geri beslemeli birinci dereceden kontrol sistemininileri besleme transfer fonksiyonu verilmiştir.a-) Kontrol sisteminin birim basamak giriş için geçici ve kalıcı durum karakteristiklerini s-
bölgesinden belirleyiniz.
b-) Birim basamak cevabını bularak cevabın zamana göre değişimini çiziniz.
c-) Birim impuls cevabını bularak cevabın zamana göre değişimini çiziniz.
d-) Birim rampa cevabını bularak cevabın zamana göre değişimini çiziniz.

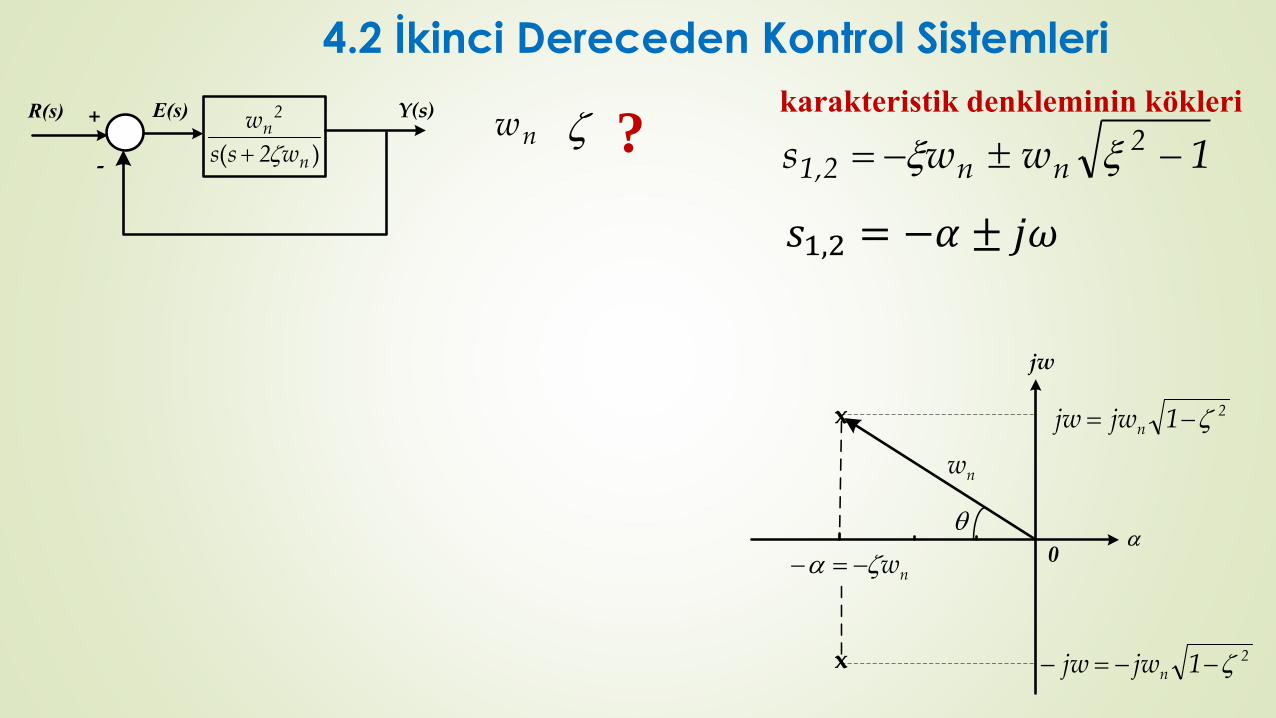
R(s) E(s) Y(s)+
-)( n
2n
w2ss
w
nw
1wws 2nn2,1
karakteristik denkleminin kökleri
0
x
x
jw
nw
2n 1jwjw
2n 1jwjw
nw
?
4.2 İkinci Dereceden Kontrol Sistemleri
𝑠1,2 = −𝛼 ± 𝑗𝜔
-1 0
x
x
-j1.73
j1.73
jw
2
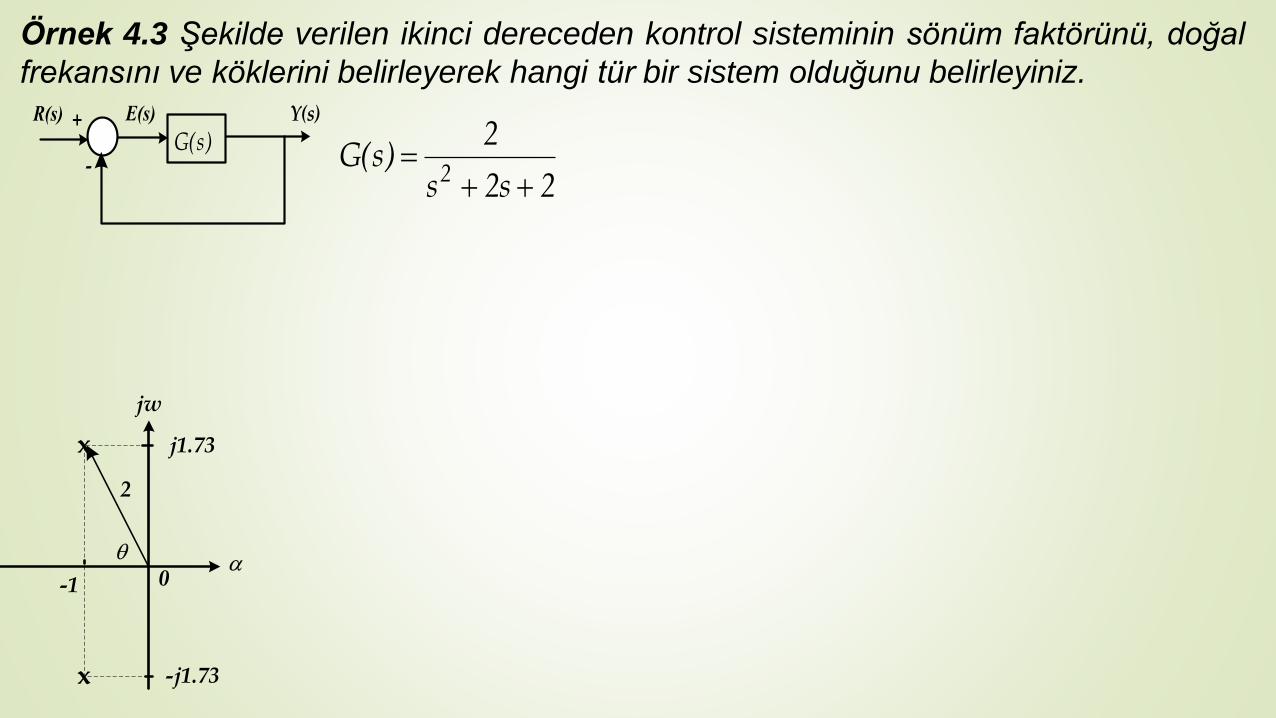
R(s) E(s) Y(s)+
-)s(G
Örnek 4.3 Şekilde verilen ikinci dereceden kontrol sisteminin sönüm faktörünü, doğal
frekansını ve köklerini belirleyerek hangi tür bir sistem olduğunu belirleyiniz.
2s2s
2)s(G
2
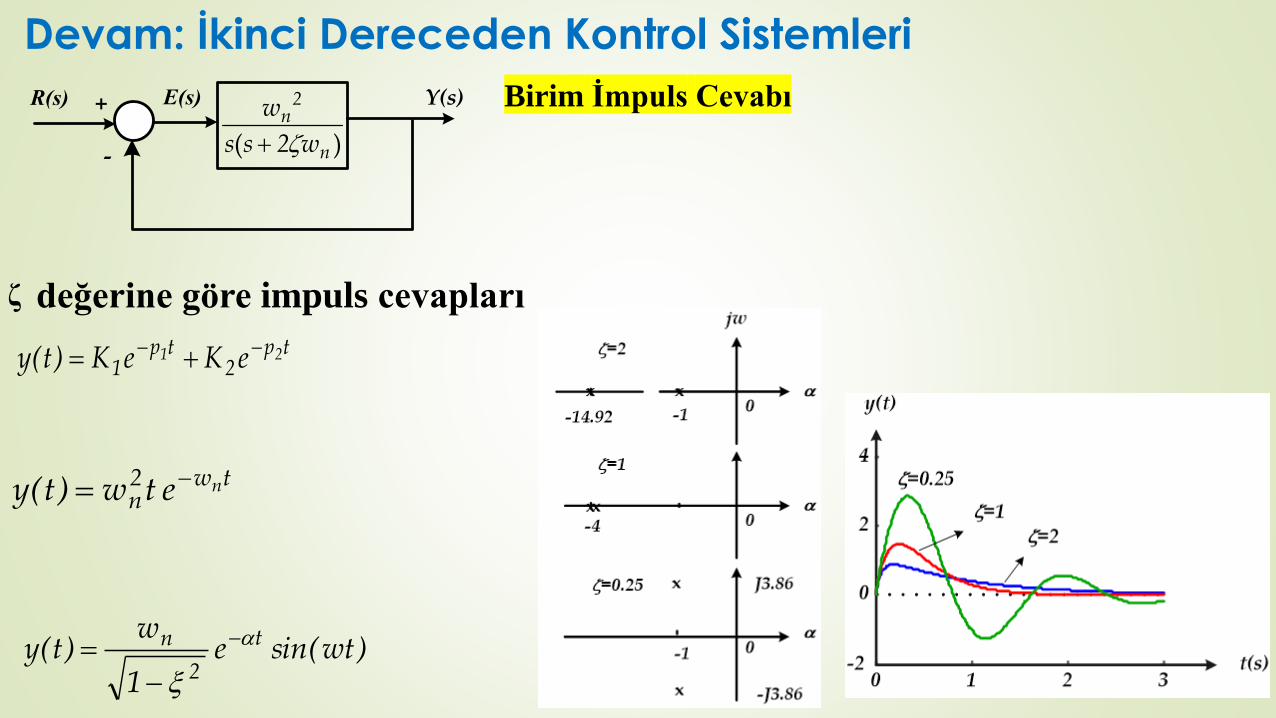
Birim İmpuls Cevabı
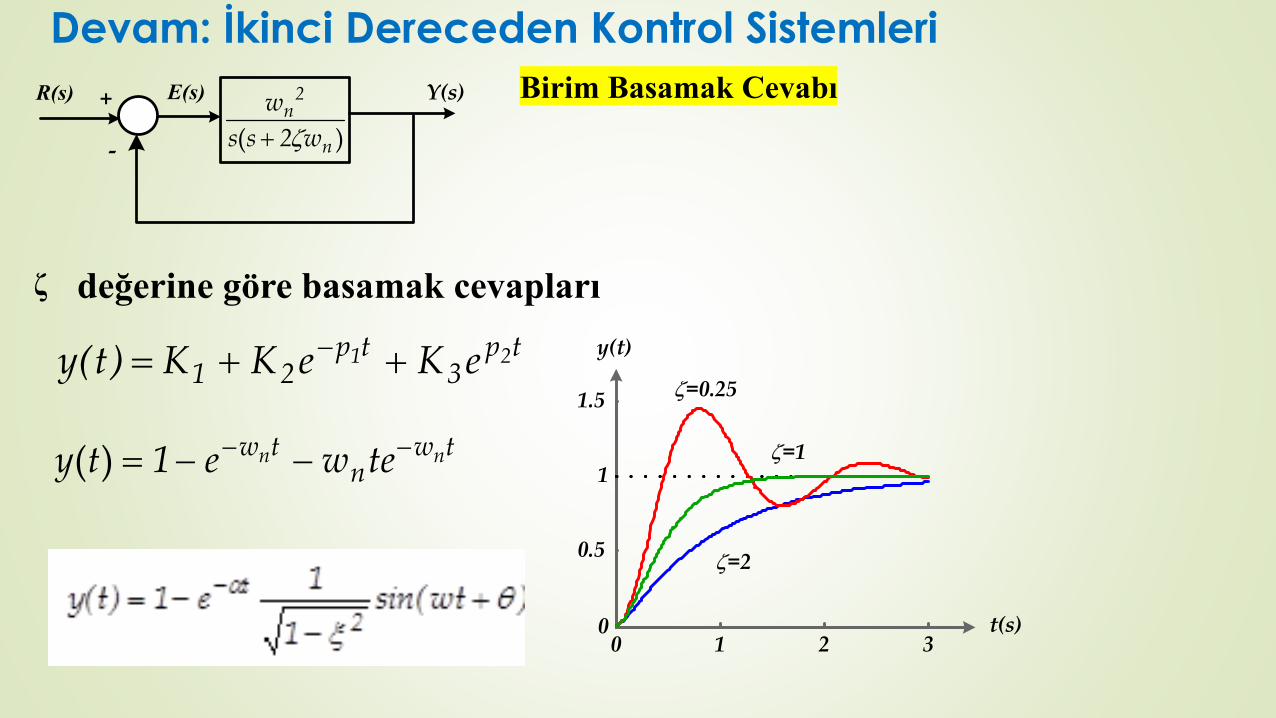
Devam: İkinci Dereceden Kontrol Sistemleri
R(s) E(s) Y(s)+
-)( n
2n
w2ss
w
tw2n
netw)t(y
tp2
tp1
21 eKeK)t(y
)wtsin(e1
w)t(y t
2
n
değerine göre impuls cevapları ζ
Devam: İkinci Dereceden Kontrol Sistemleri
R(s) E(s) Y(s)+
-)( n
2n
w2ss
w
Birim Basamak Cevabı
y(t)
t(s)0 1 2 3
0
0.5
1
1.5
=2
=1
=0.25
değerine göre basamak cevapları ζ
tp3
tp21
21 eKeKK)t(y
twn
tw nn tewe1ty )(
y(t)
t(s)0 1 2 3
0
1
2
3r(t)
=2
=1
=0.25
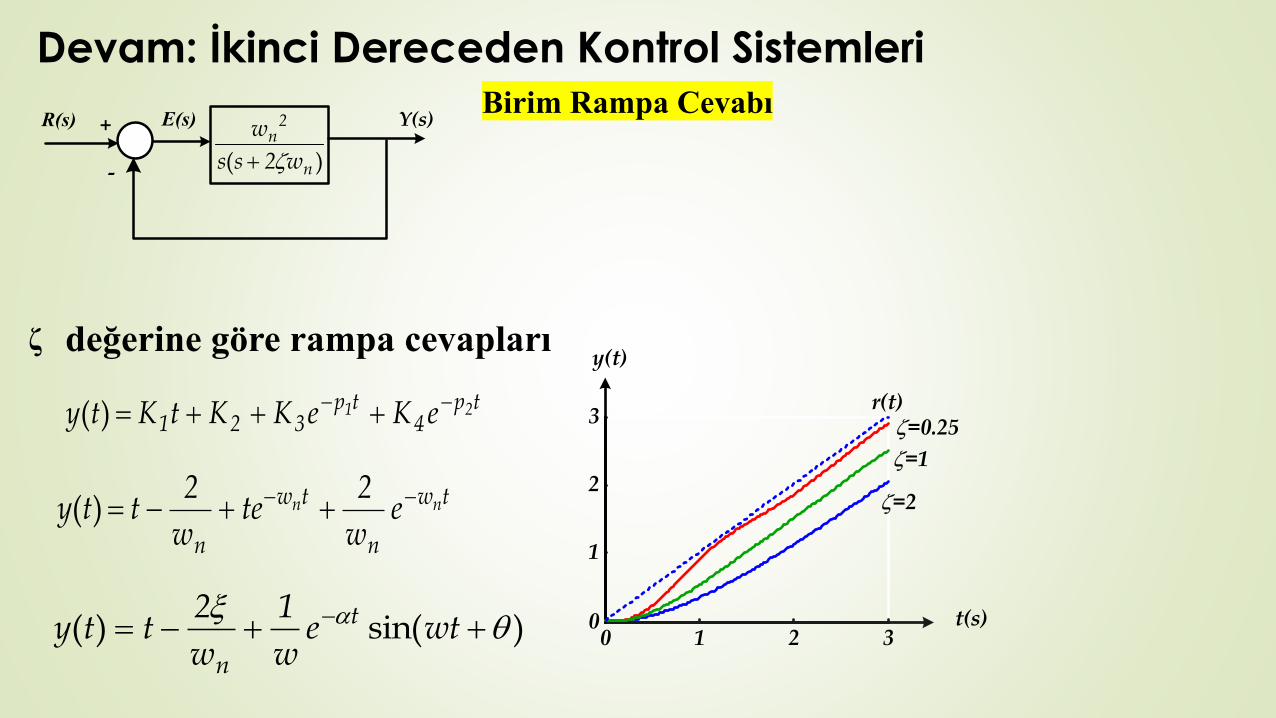
Birim Rampa Cevabı
Devam: İkinci Dereceden Kontrol Sistemleri
R(s) E(s) Y(s)+
-)( n
2n
w2ss
w
değerine göre rampa cevapları ζ
tp4
tp321
21 eKeKKtKty )(
tw
n
tw
n
nn ew
2te
w
2tty )(
)sin()( wte
w
1
w
2tty t
n
y(t)
t(s)0 1 2 3
-1
0
1
2
3
t(s)
y(t)
0 1 2 30
0.5
1
1.5
y(t)
t(s)
r(t)
0 1 2 30
1
2
3
y(t)
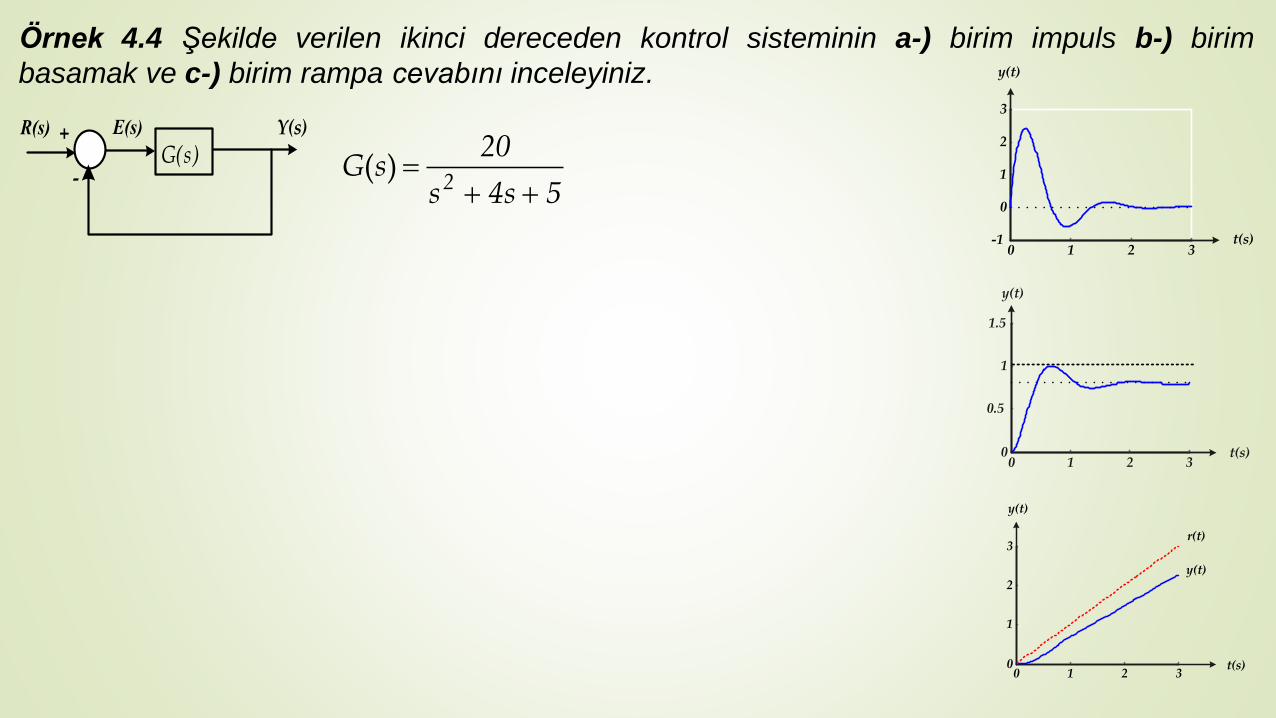
Örnek 4.4 Şekilde verilen ikinci dereceden kontrol sisteminin a-) birim impuls b-) birim
basamak ve c-) birim rampa cevabını inceleyiniz.
R(s) E(s) Y(s)+
-)s(G
5s4s
20sG
2 )(

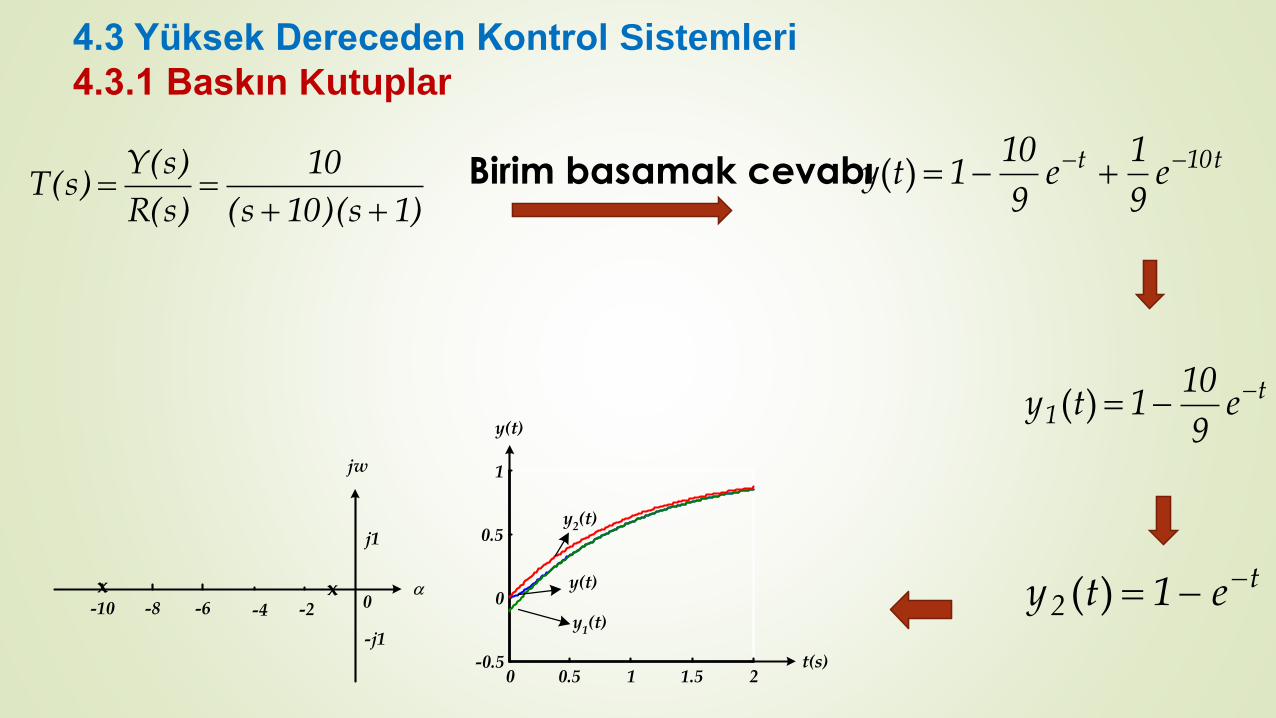
4.3 Yüksek Dereceden Kontrol Sistemleri
4.3.1 Baskın Kutuplar
)1s)(10s(
10
)s(R
)s(Y)s(T
t10t e9
1e
9
101ty )(
t1 e
9
101ty )(
t2 e1ty )(
0 0.5 1 1.5 2-0.5
0
0.5
1
y(t)
t(s)
-10 -8 -4 -2 0
j1
x x
-j1
jw
-6
y2(t)
y(t)
y1(t)
Birim basamak cevabı

-20 -18 -4 -2
j2
0
j1
y(t)
t(s)0 2 4
-0.5
0
0.5
1
1.5
y1(t)
y2(t)
y(t)
x
x
x
-j2
-j1
jw
))(()(
)()(
5s2s20s
100
sR
sYsT
2
Örnek 4.5 Üçüncü dereceden bir kontrol sisteminin kapalı çevrim transfer fonksiyonu verilmiştir.
a-) Birim impuls cevabını bulunuz.
b-) Baskın kutup kavramını kullanarak sistemi indirgeyiniz ve indirgenmiş sistemin birim impuls cevabını
bulunuz.
c-) (s= -20) deki kutbu, baskın kutba yaklaştırarak, örneğin (s= -2 ye taşıyarak), sistemin birim impuls
cevabının nasıl değiştiğini belirleyiniz.
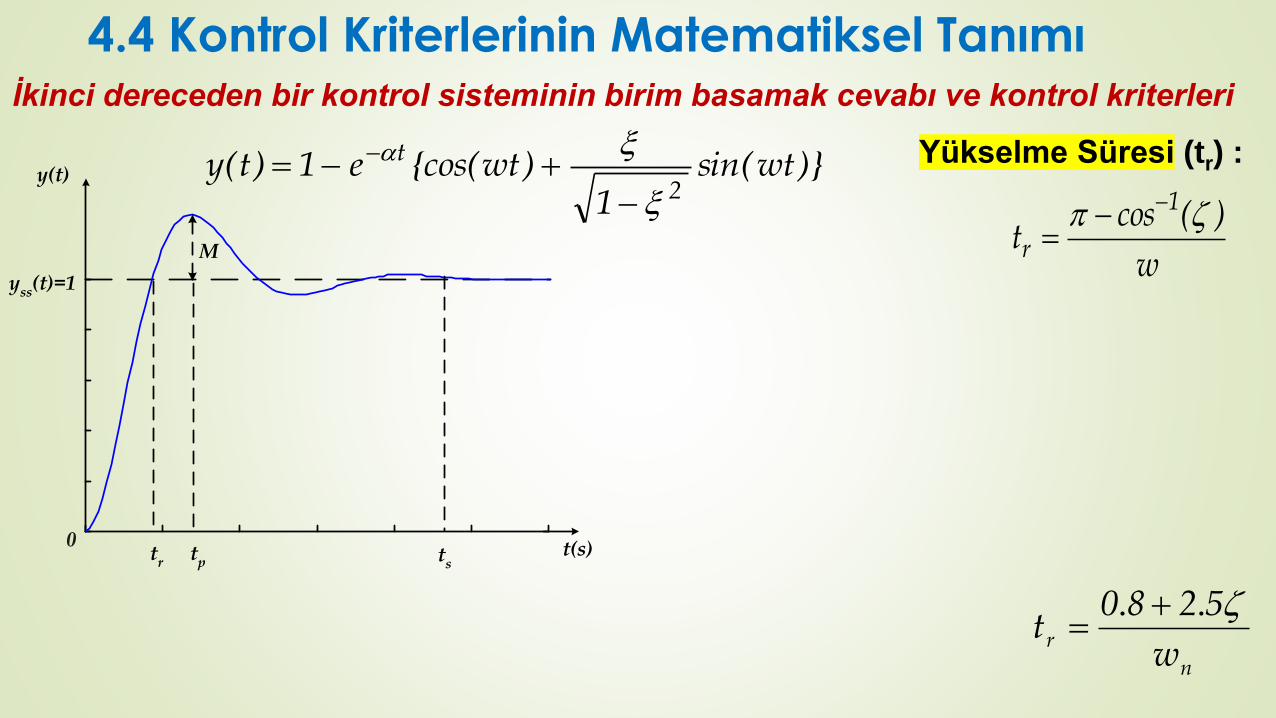
4.4 Kontrol Kriterlerinin Matematiksel Tanımı
t(s)0
y(t)
M
tr tstp
yss(t)=1
İkinci dereceden bir kontrol sisteminin birim basamak cevabı ve kontrol kriterleri
Yükselme Süresi (tr) :
w
)(cost
1
r
n
rw
5280t
..
)}wtsin(1
)wt{cos(e1)t(y2
t
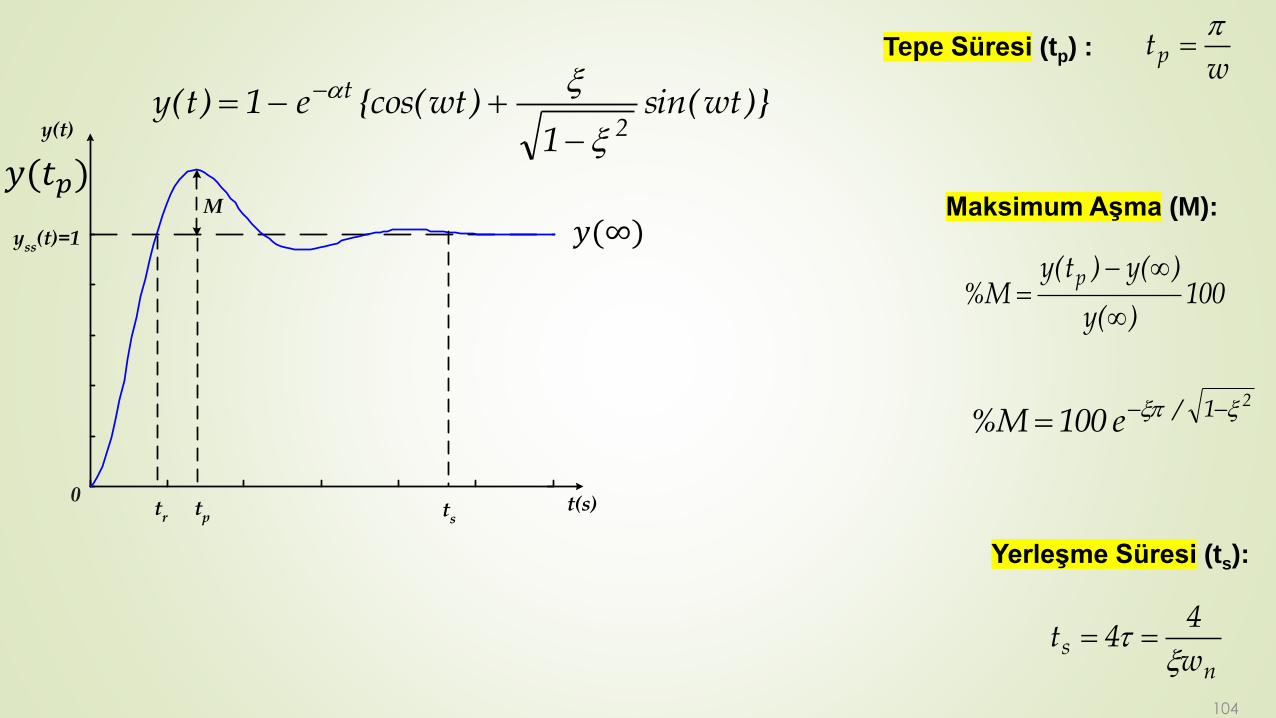
Maksimum Aşma (M):
wtp
21/e100M%
Yerleşme Süresi (ts):
ns
w
44t
104
t(s)0
y(t)
M
tr tstp
yss(t)=1
Tepe Süresi (tp) :
)}wtsin(1
)wt{cos(e1)t(y2
t
100)(y
)(y)t(yM%
p
𝑦(∞)
𝑦(𝑡𝑝)
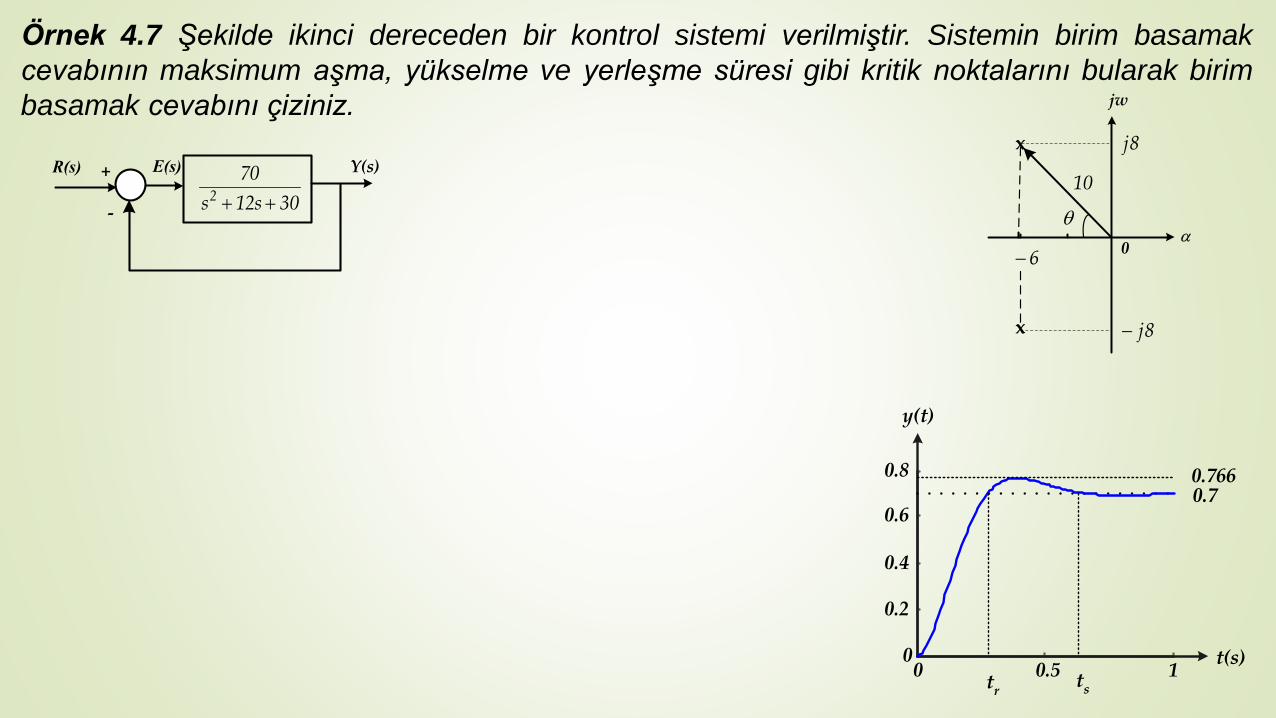
0 0.5 10
0.2
0.4
0.6
0.8
t(s)
y(t)
0.7660.7
tstr
0
x
x
jw
6
8j
8j
10
Örnek 4.7 Şekilde ikinci dereceden bir kontrol sistemi verilmiştir. Sistemin birim basamak
cevabının maksimum aşma, yükselme ve yerleşme süresi gibi kritik noktalarını bularak birim
basamak cevabını çiziniz.
R(s) E(s) Y(s)+
-30s12s
702
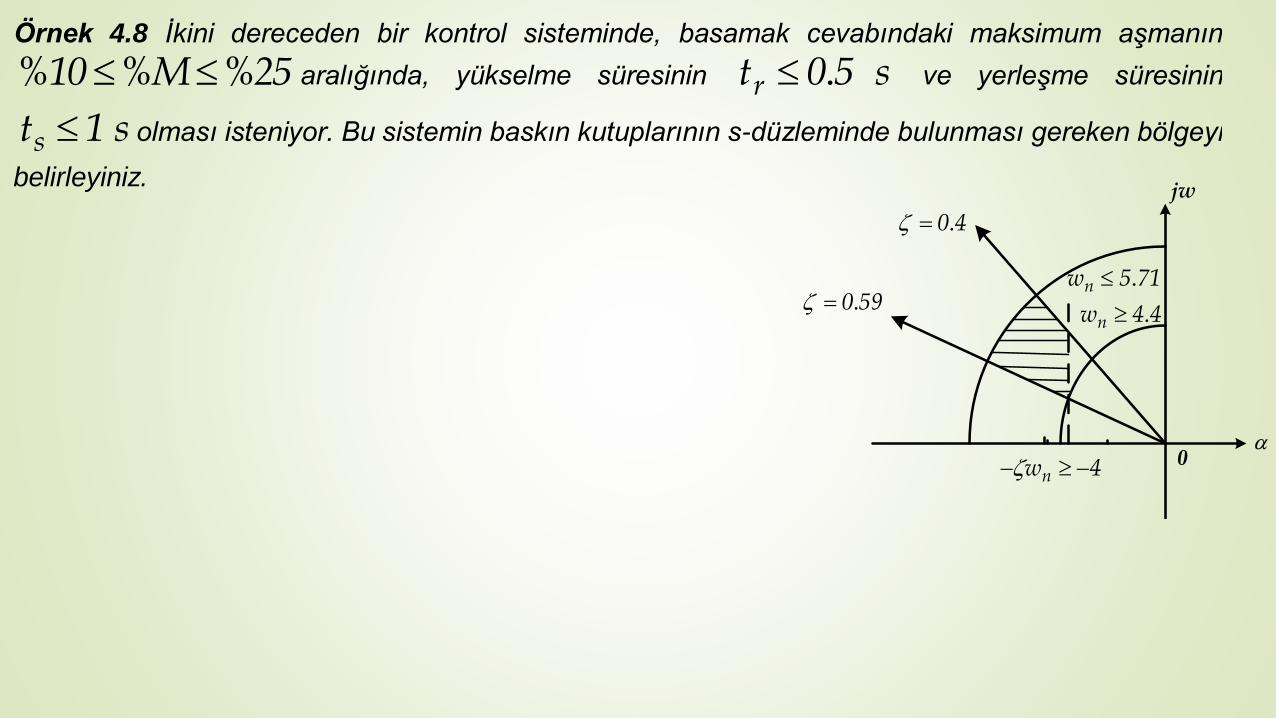
Örnek 4.8 İkini dereceden bir kontrol sisteminde, basamak cevabındaki maksimum aşmanın
25M10 %%% aralığında, yükselme süresinin s50tr . ve yerleşme süresinin
s1ts olması isteniyor. Bu sistemin baskın kutuplarının s-düzleminde bulunması gereken bölgeyi
belirleyiniz.
0
jw
40.
590.
4wn
44wn .
715wn .
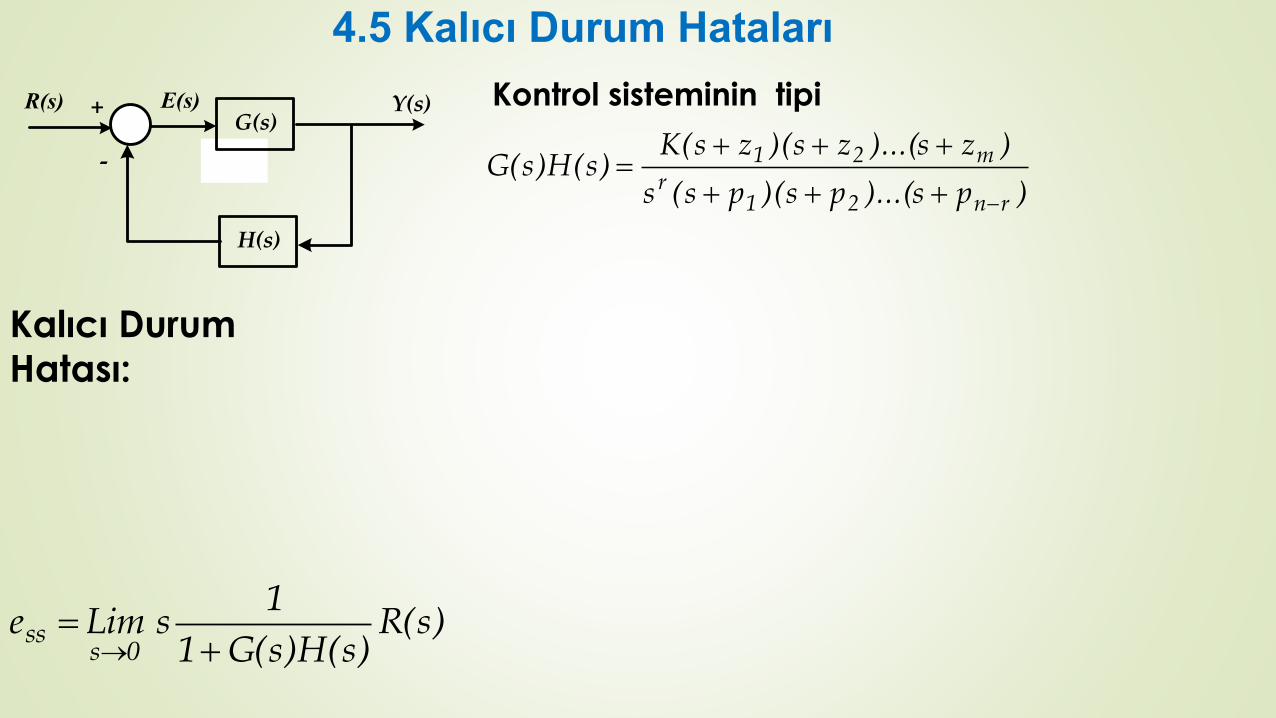
4.5 Kalıcı Durum Hataları
R(s) E(s) Y(s)G(s)
H(s)
+
-
)s(R)s(H)s(G1
1sLime
0sss
Kalıcı Durum Hatası:
)ps)...(ps)(ps(s
)zs)...(zs)(zs(K)s(H)s(G
rn21r
m21
Kontrol sisteminin tipi
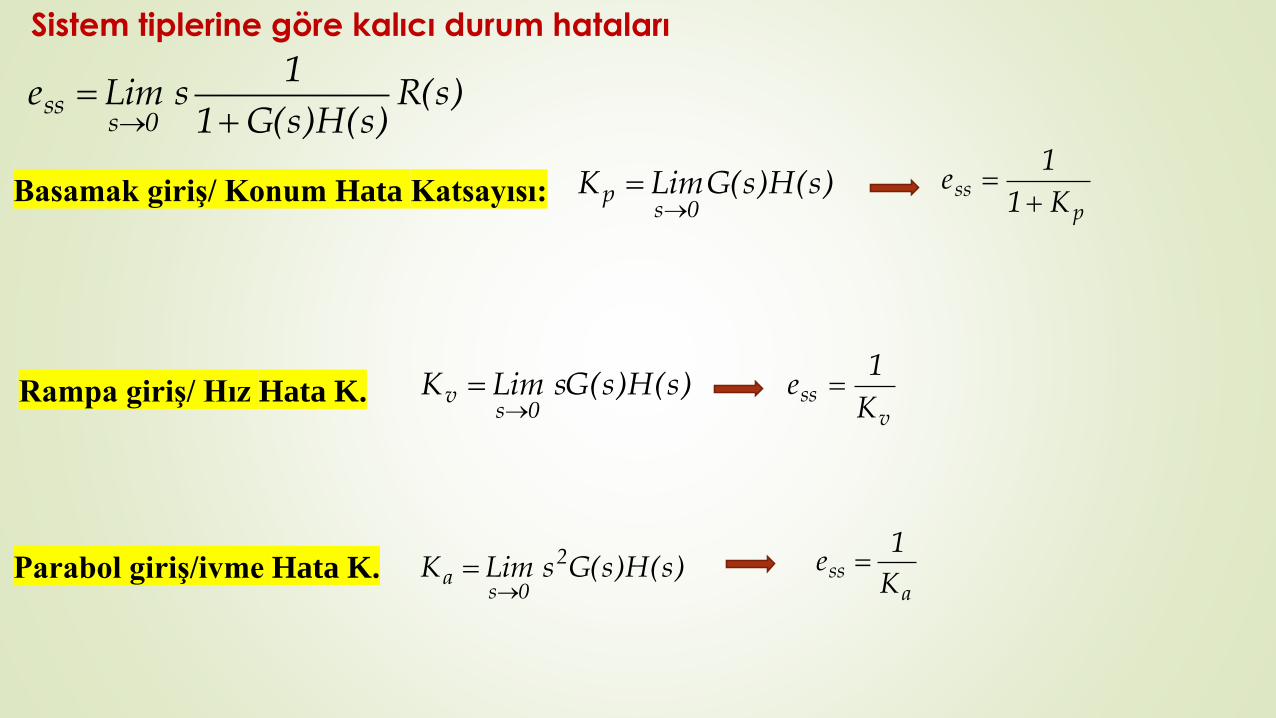
Basamak giriş/ Konum Hata Katsayısı: )s(H)s(GLimK0s
p
p
ssK1
1e
Rampa giriş/ Hız Hata K.
Parabol giriş/ivme Hata K.
)s(H)s(sGLimK0s
v
v
ssK
1e
)s(H)s(GsLimK 2
0sa
ass
K
1e
Sistem tiplerine göre kalıcı durum hataları
)s(R)s(H)s(G1
1sLime
0sss
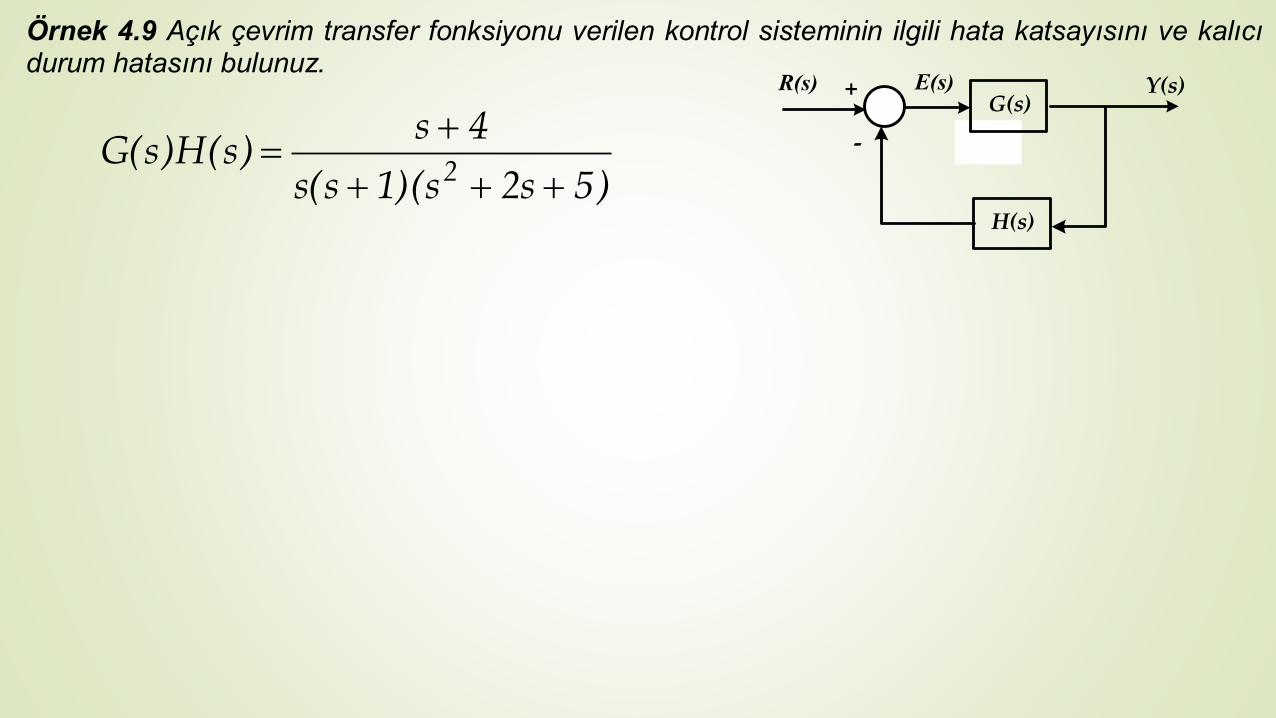
Örnek 4.9 Açık çevrim transfer fonksiyonu verilen kontrol sisteminin ilgili hata katsayısını ve kalıcı durum hatasını bulunuz.
)5s2s)(1s(s
4s)s(H)s(G
2
R(s) E(s) Y(s)G(s)
H(s)
+
-
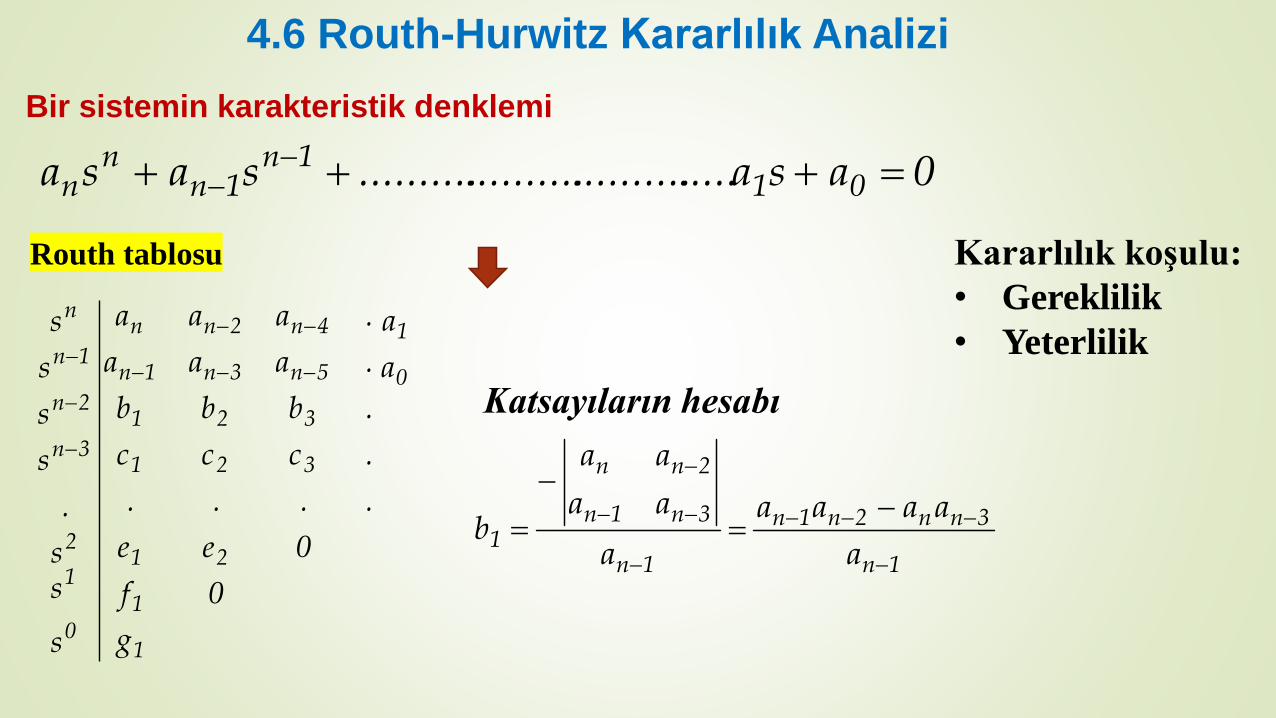
4.6 Routh-Hurwitz Kararlılık Analizi
0asa...................................sasa 011n
1nn
n
Bir sistemin karakteristik denklemi
0
1
1
1
21
321
321
5n3n1n
4n2nn
0
1
2
3n
2n
1n
n
a
a
g
0f
0ee
....
.ccc
.bbb
.aaa
.aaa
s
ss
.
s
s
s
s
Routh tablosu
1n
3nn2n1n
1n
3n1n
2nn
1a
aaaa
a
aa
aa
b
Katsayıların hesabı
Kararlılık koşulu:
• Gereklilik
• Yeterlilik
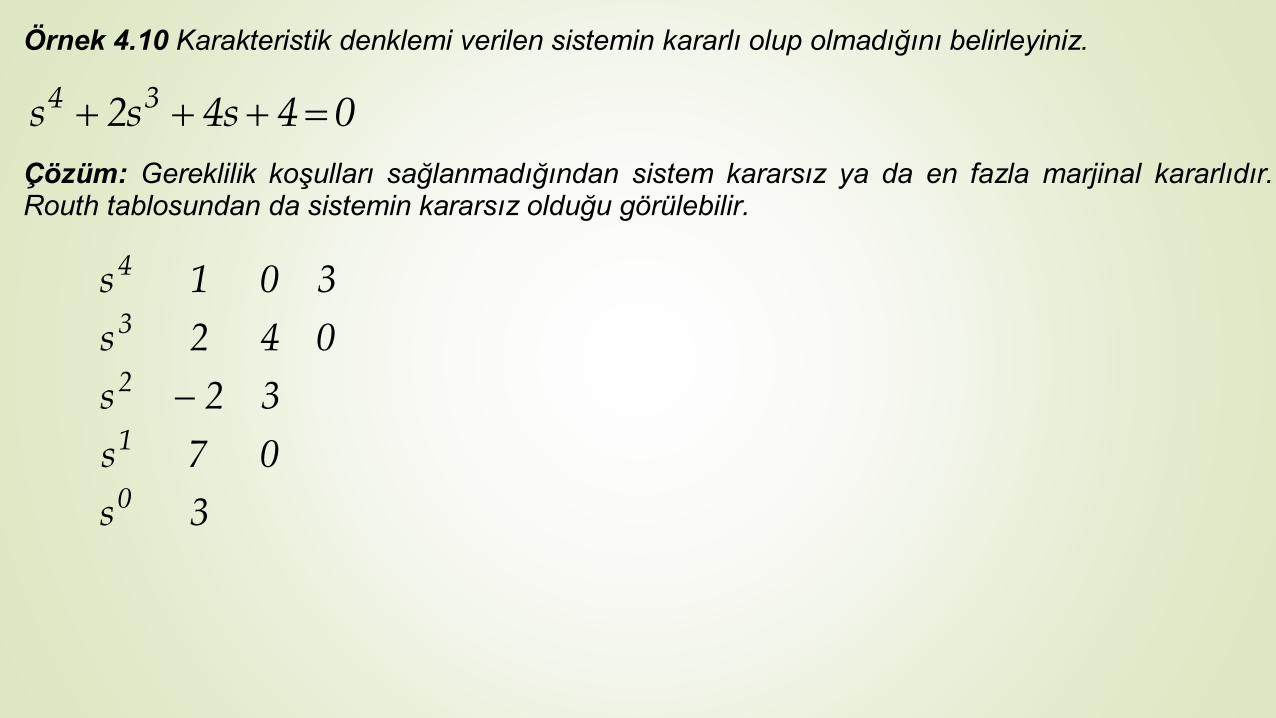
Örnek 4.10 Karakteristik denklemi verilen sistemin kararlı olup olmadığını belirleyiniz.
04s4s2s 34
Çözüm: Gereklilik koşulları sağlanmadığından sistem kararsız ya da en fazla marjinal kararlıdır. Routh tablosundan da sistemin kararsız olduğu görülebilir.
3s
07s
32s
042s
301s
0
1
2
3
4
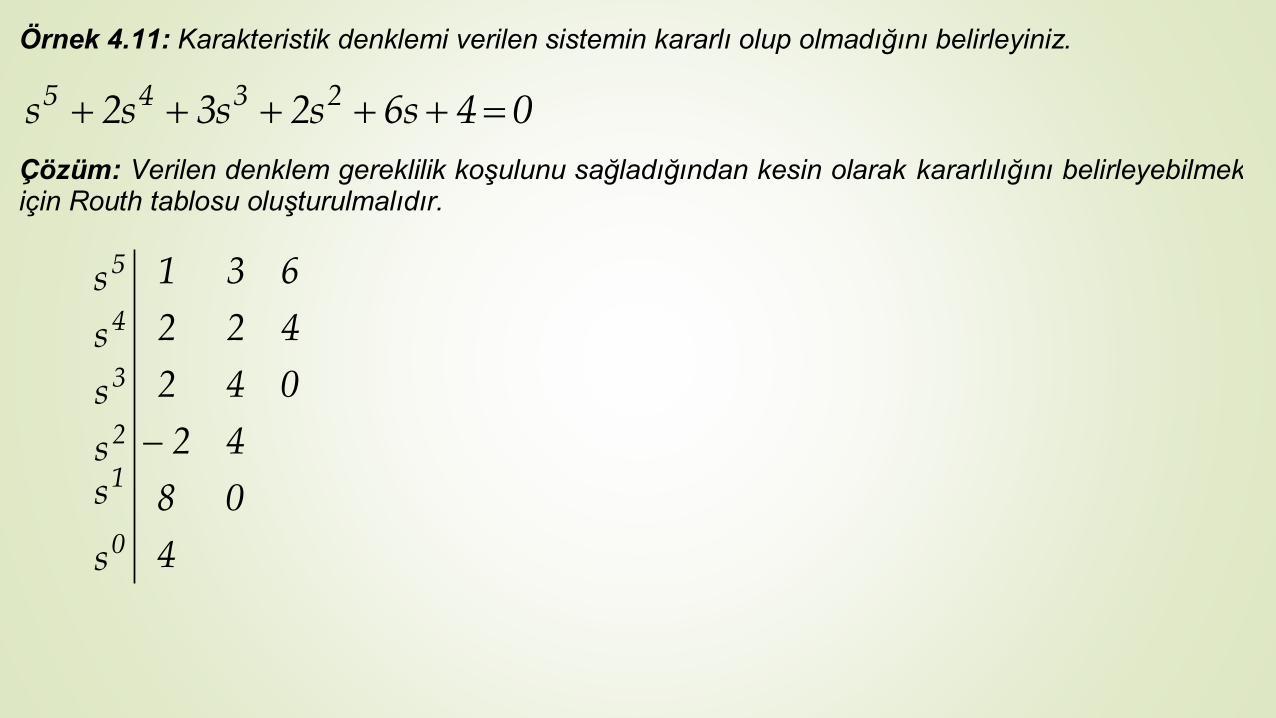
Örnek 4.11: Karakteristik denklemi verilen sistemin kararlı olup olmadığını belirleyiniz.
04s6s2s3s2s 2345
Çözüm: Verilen denklem gereklilik koşulunu sağladığından kesin olarak kararlılığını belirleyebilmek için Routh tablosu oluşturulmalıdır.
4
08
42
042
422
631
s
ss
s
s
s
0
1
2
3
4
5
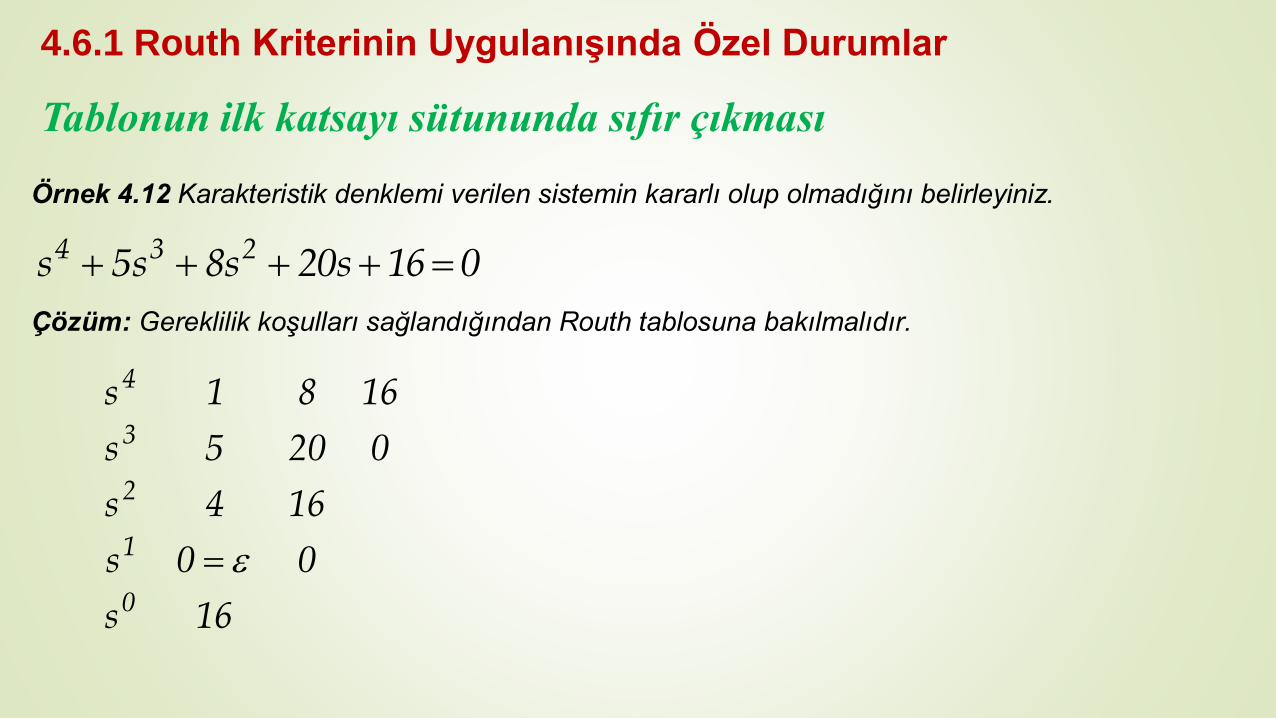
4.6.1 Routh Kriterinin Uygulanışında Özel Durumlar
Örnek 4.12 Karakteristik denklemi verilen sistemin kararlı olup olmadığını belirleyiniz.
016s20s8s5s 234
Çözüm: Gereklilik koşulları sağlandığından Routh tablosuna bakılmalıdır.
16s
00s
164s
0205s
1681s
0
1
2
3
4
Tablonun ilk katsayı sütununda sıfır çıkması
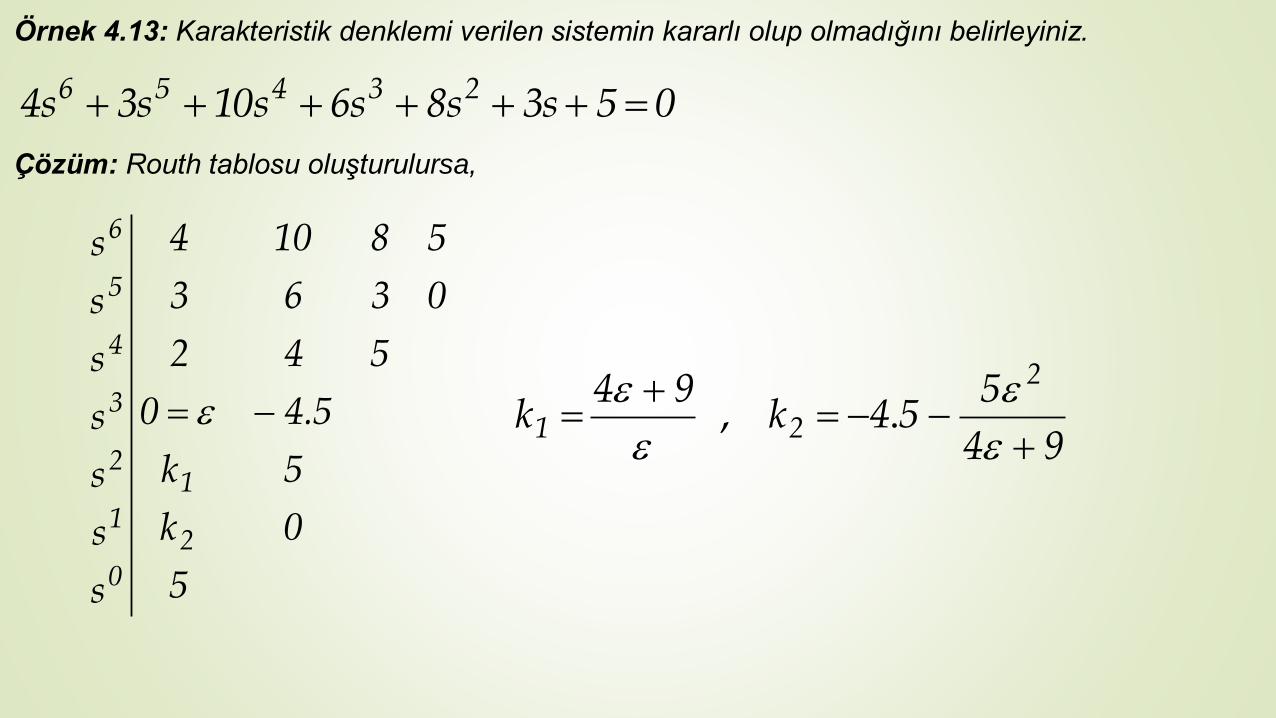
Örnek 4.13: Karakteristik denklemi verilen sistemin kararlı olup olmadığını belirleyiniz.
05s3s8s6s10s3s4 23456
Çözüm: Routh tablosu oluşturulursa,
5
0k
5k
5.40
542
0363
58104
s
s
s
s
s
s
s
2
1
0
1
2
3
4
5
6
94
554k
94k
2
21
.,

Örnek 4.14. Karakteristik denklemi verilen sistemin kararlı olup olmadığını belirleyiniz.
04s8s7s6s5s4s2 23456
Çözüm: Routh tablosu oluşturulursa,
4
016
451
6080
432
0864
4752
s
s
s
s
s
s
s
0
1
2
3
4
5
6
.
)()(
s6s8sPds
d
4s3s2sP
3
24
)(
)(
Tablonun bir satırının tüm elemanların sıfır olması

K4
0K14K6K6
0K4K1
0K642
K4K231
ss
s
s
s
2
0
1
2
3
4
)/()(
45740K0 .
Örnek 4.16 Şekilde verilen kontrol sisteminin kararlı olabilmesi için kontrolör parametresi K’nın
hangi sınırlar arasında olması gerekir.
R(s) Y(s)
2
+
- s
)2s(K
4s3s2s
1s23


R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)
R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)
Gf(s)
Şekil 5.1 Geri beslemeli
seri kompanzasyon yapısı
Şekil 5.2 Geri beslemeli seri ve ileri
beslemeli kompanzasyon yapısı
Tek serbestlik dereceli ve iki serbestlik dereceli kontrol sistemleri
Bölüm 5
Kontrolörler ve Kontrol Sistemlerinin Tasarım Esasları
5.1 Temel Kontrol Yapıları ve Kontrol Etkileri

5.1.1 İki Konumlu Kontrolörler
0)t(e,U
0)t(e,U)t(u
min
max
0
Umax
u(t)
e(t)
Umin
Umax
u(t)
e(t)
Umin
+d
-d
(b)(a)
y(t)y(t)
t(s)t(s)
1.5
0
0.5
1
1.5
0
0.5
1
(b)(a)
dteU
dteUtu
)(,
)(,)(
min
max
R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)
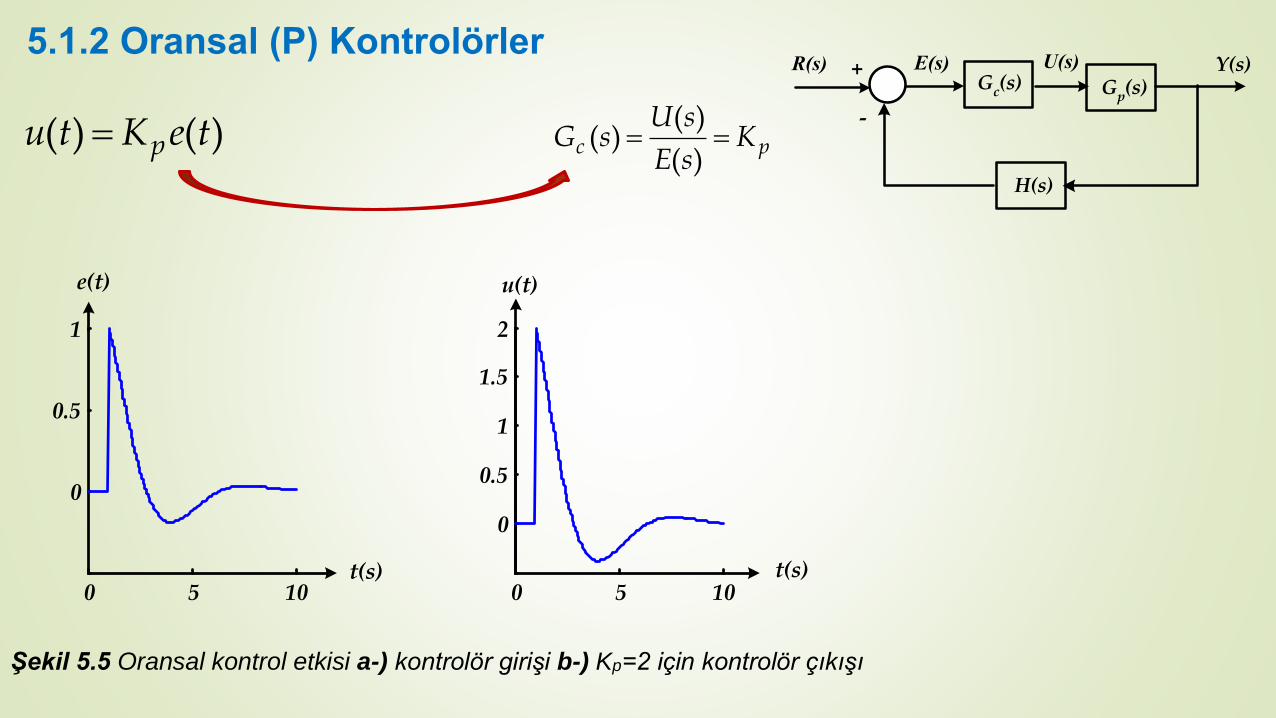
5.1.2 Oransal (P) Kontrolörler
)()( teKtu p pc KsE
sUsG
)(
)()(
u(t)e(t)
t(s) t(s)0 5 10
0
0.5
1
0 5 10
0
0.5
1
1.5
2
Şekil 5.5 Oransal kontrol etkisi a-) kontrolör girişi b-) Kp=2 için kontrolör çıkışı
R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)

y(t)
t(s)0 0.5 1 1.5 2
0
0.2
0.4
0.6
0.8
1
Kp=10
Kp=1
y(t)
t(s)0 2.5 5
0
0.5
1
Kp=5
Kp=20
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
4s
3sGp
)(
)()(
4ss
1sGp
a-) Birinci dereceden tip 0 sistem için
b-) İkinci dereceden tip 1 sistem için inceleyiniz.
Örnek 5.1 Şekilde verilen birim geri beslemeli kontrol yapısında aşağıdaki sistemler için oransal
kontrolörün etkisini,
a-)
b-)

t
0
i dtteKtu )()( s
K
sE
sUsG i
c )(
)()(
u(t)e(t)
t(s) t(s)0 5 10
0
0.5
1
0 5 100
0.2
0.4
0.6
0.8
1
(b)(a)
Şekil 5.6 İntegral kontrol etkisi a-) kontrolör girişi b-) Ki=1 için kontrolör çıkışı
R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)
5.1.3 İntegral (I) Kontrolörler
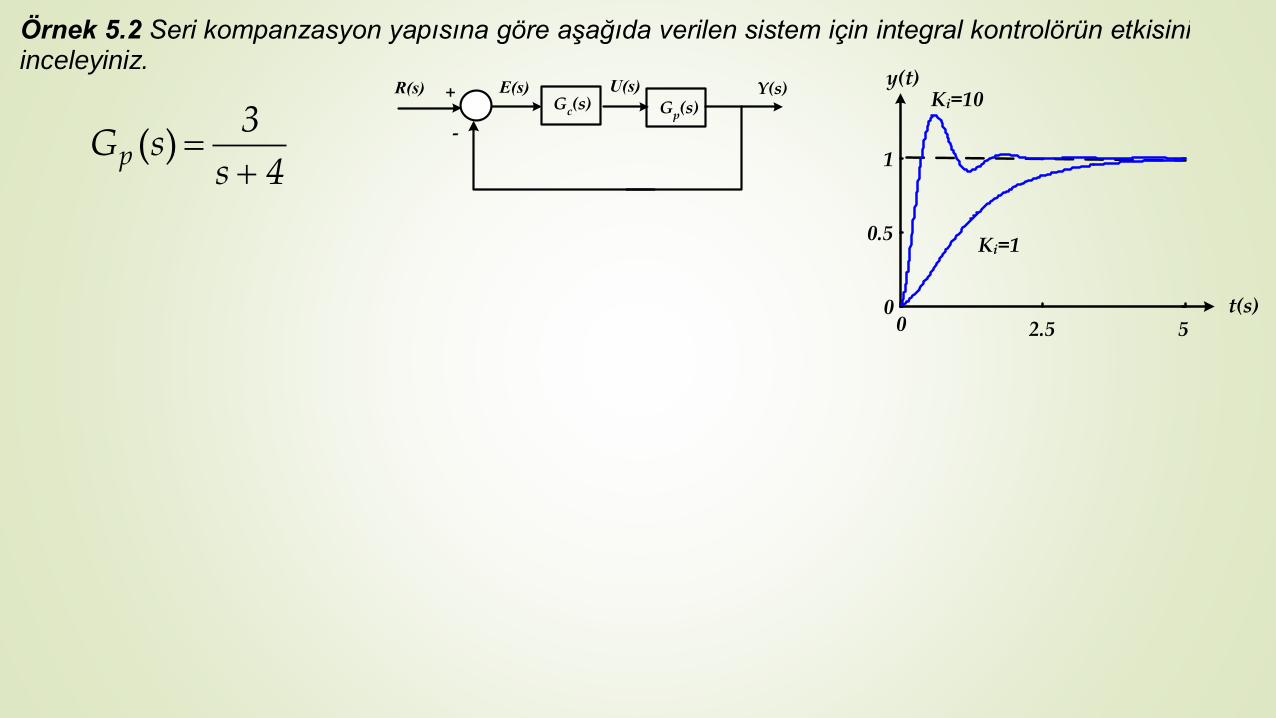
Örnek 5.2 Seri kompanzasyon yapısına göre aşağıda verilen sistem için integral kontrolörün etkisini inceleyiniz.
4s
3sGp
)(
y(t)
t(s)2.5 50
0
0.5
1
Ki=1
Ki=10R(s) E(s) Y(s)
Gc(s)+
-
Gp(s)U(s)
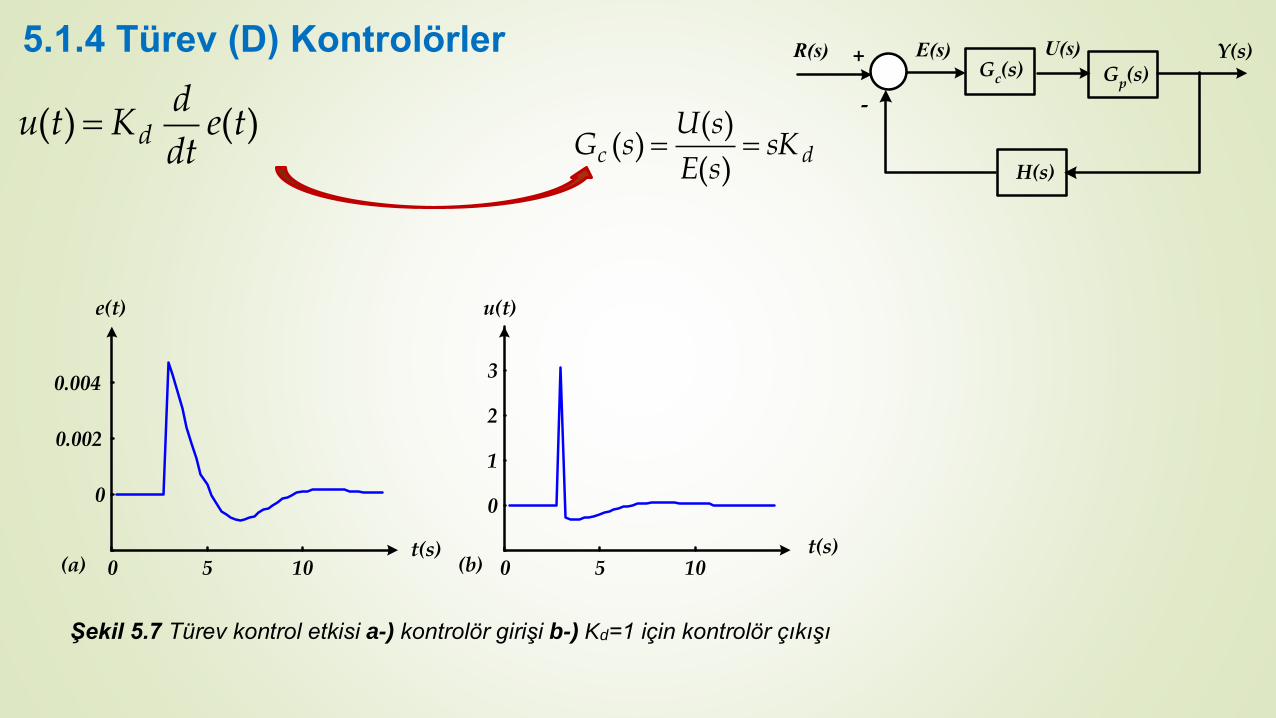
5.1.4 Türev (D) Kontrolörler
)()( tedt
dKtu d
dc sKsE
sUsG
)(
)()(
u(t)e(t)
t(s) t(s)0 5 10
0
0.002
0.004
0 5 10
0
1
2
3
(b)(a)
Şekil 5.7 Türev kontrol etkisi a-) kontrolör girişi b-) Kd=1 için kontrolör çıkışı
R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)
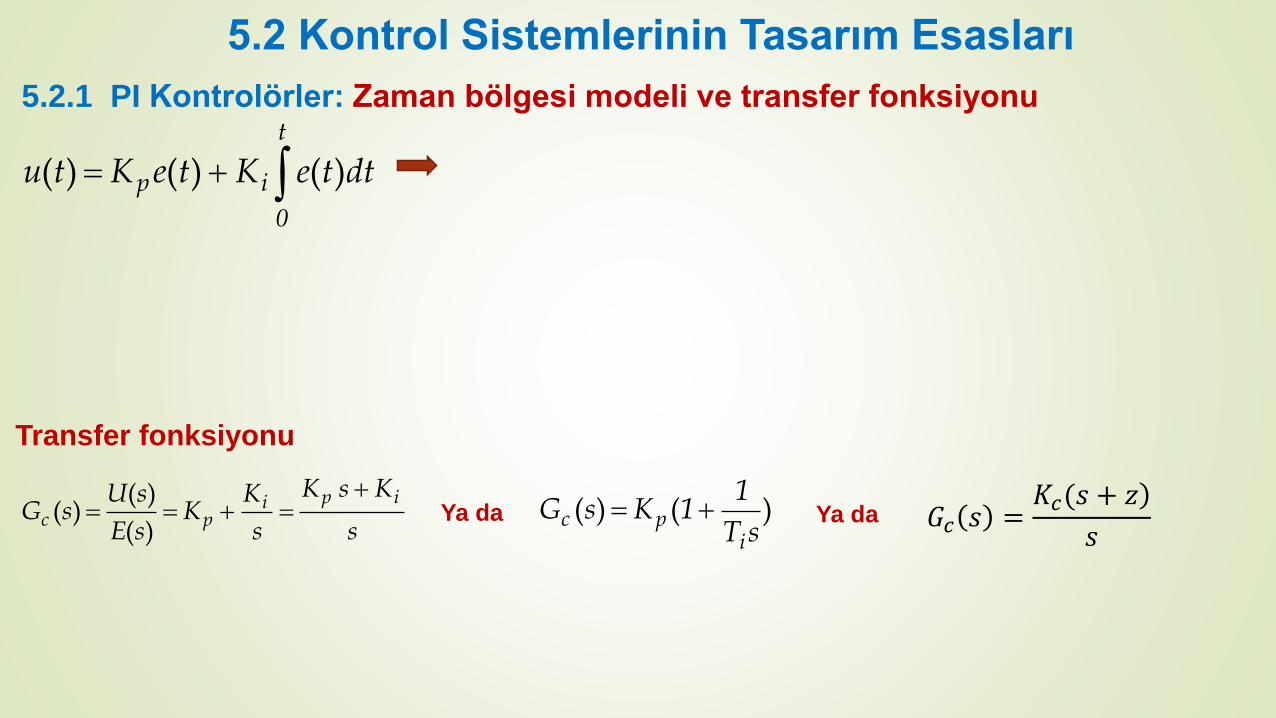
5.2.1 PI Kontrolörler: Zaman bölgesi modeli ve transfer fonksiyonu
t
0
ip dtteKteKtu )()()(
s
KsK
s
KK
sE
sUsG
ipipc
)(
)()( )()(
sT
11KsG
ipc
Transfer fonksiyonu
Ya da 𝐺𝑐 𝑠 =)𝐾𝑐(𝑠 + 𝑧
𝑠Ya da
5.2 Kontrol Sistemlerinin Tasarım Esasları
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
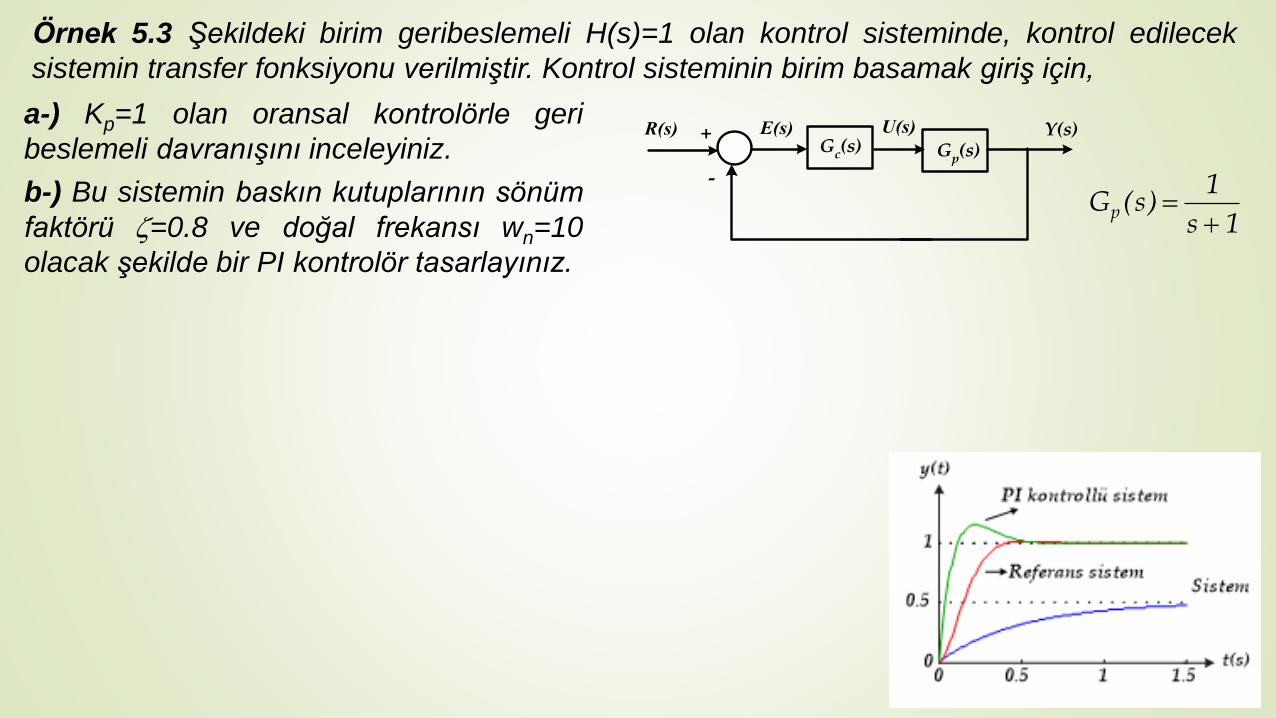
Örnek 5.3 Şekildeki birim geribeslemeli H(s)=1 olan kontrol sisteminde, kontrol edilecek
sistemin transfer fonksiyonu verilmiştir. Kontrol sisteminin birim basamak giriş için,
a-) Kp=1 olan oransal kontrolörle geri
beslemeli davranışını inceleyiniz.
b-) Bu sistemin baskın kutuplarının sönüm
faktörü =0.8 ve doğal frekansı wn=10
olacak şekilde bir PI kontrolör tasarlayınız.
1s
1)s(Gp

c-) Tasarladığınız PI kontrolörle, sistemden beklenen davranışın tam olarak sağlanıp
sağlanamayacağını, sağlanamıyorsa nedenini ve çözüm yolunu belirleyiniz.
R(s) E(s) Y(s)
Gc(s)+
-
Gp(s)U(s)
Gf(s)
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
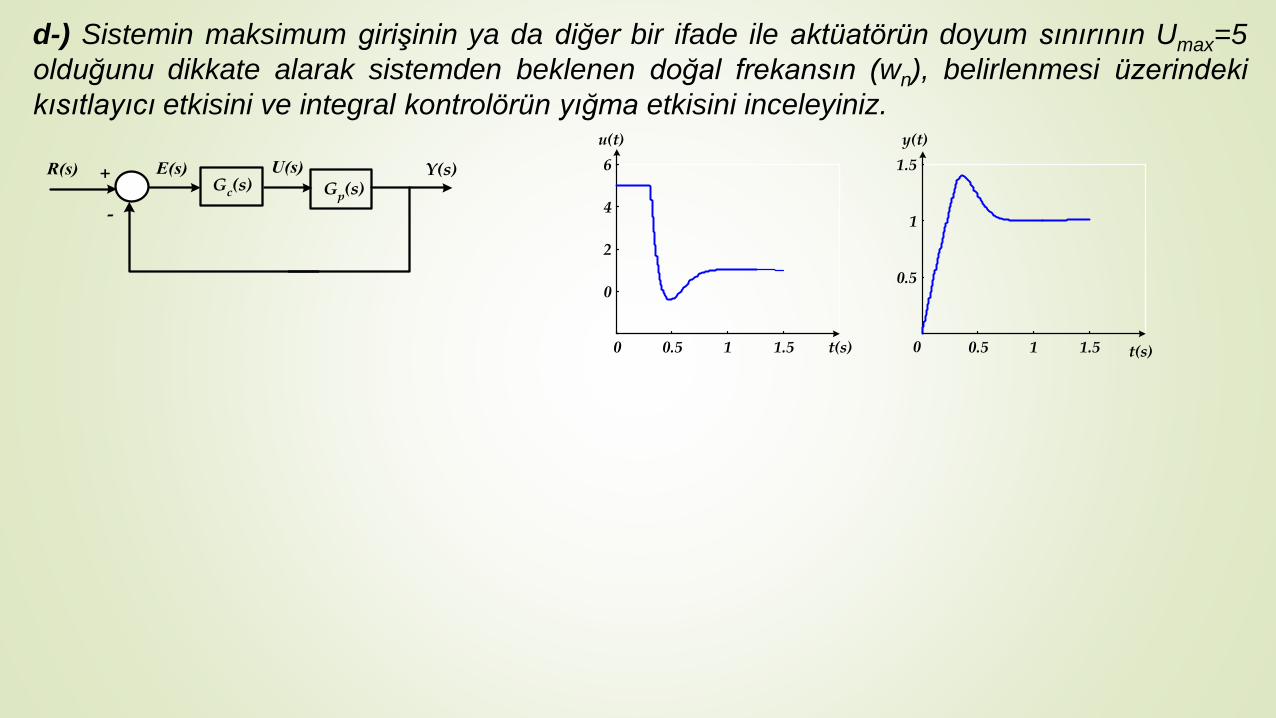
d-) Sistemin maksimum girişinin ya da diğer bir ifade ile aktüatörün doyum sınırının Umax=5
olduğunu dikkate alarak sistemden beklenen doğal frekansın (wn), belirlenmesi üzerindeki
kısıtlayıcı etkisini ve integral kontrolörün yığma etkisini inceleyiniz.
0 0.5 1 1.5 t(s)
0
2
4
6
0 0.5 1 1.5
0.5
1
1.5
u(t) y(t)
t(s)
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
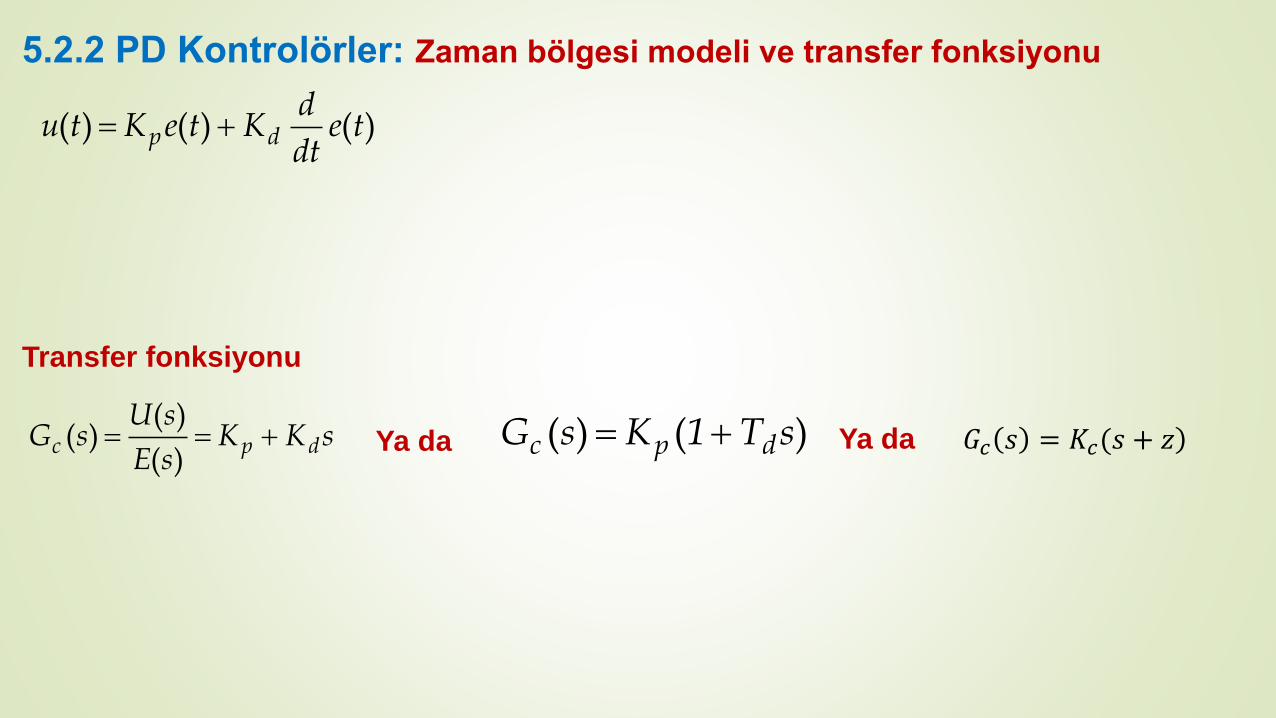
5.2.2 PD Kontrolörler: Zaman bölgesi modeli ve transfer fonksiyonu
)()()( tedt
dKteKtu dp
sKKsE
sUsG dpc
)(
)()( )()( sT1KsG dpc
Transfer fonksiyonu
Ya da Ya da 𝐺𝑐 𝑠 = )𝐾𝑐(𝑠 + 𝑧

0 1 2 3 40
0.5
1
y(t)
t(s)
Sistem
PD kontrollü sistem
Referans sistem
jw
x
x
o-8
j6
-j6
-6.78
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
Örnek 5.4 Seri kompanzasyon yapısını esas alarak transfer fonksiyonu verilen sistemin
basamak giriş için, Kp=1 olan oransal kontrolörle doğal davranışını inceleyerek baskın
kutuplarının sönüm faktörü =0.8, doğal frekansı wn=10 olacak şekilde bir PD kontrolör
tasarlayınız. Tasarladığınız kontrol sisteminin performansını değerlendiriniz.
5s2s
20sG
2p
)(
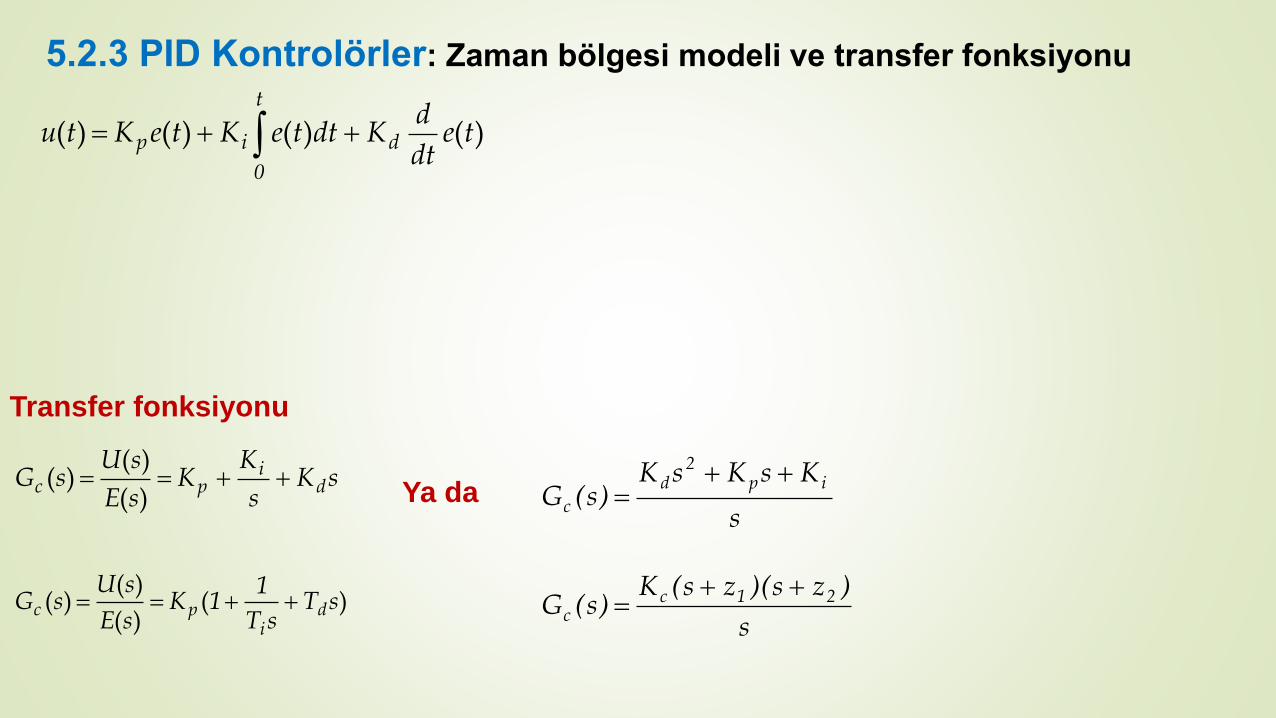
5.2.3 PID Kontrolörler: Zaman bölgesi modeli ve transfer fonksiyonu
)()()()( tedt
dKdtteKteKtu d
t
0
ip
sKs
KK
sE
sUsG d
ipc
)(
)()(
)()(
)()( sT
sT
11K
sE
sUsG d
ipc
Transfer fonksiyonu
Ya das
KsKsK)s(G
ip2
d
c
s
)zs)(zs(K)s(G 21c
c

0 0.5 10
0.5
1
t(s)
y(t)
PID kontrollü sistem
Referans sistem
jw
x
x
o-8
j6
-j6
-13.66 -0.59o
Örnek 5.5 Seri kompanzasyon yapısını esas alarak transfer fonksiyonu verilen sistemin baskın
kutuplarını sönüm faktörü =0.8, doğal frekansı wn=10 ve kalıcı durum basamak hatası
oluşmayacak şekilde bir PID kontrolör tasarlayınız.
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
5s2s
20sG
2p
)(

R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)Örnek 5.6 Seri kompanzasyon yapısını esas
alarak aşağıda transfer fonksiyonu verilen sistem
için kutup-sıfır iptali ile uygun bir kontrolörü
tasarlayınız.
)5s2s)(1s(
)2s(20)s(G
2p
5s2s
)KsK(20
)5s2s)(1s(
)2s(20
2s
)1s)(KsK()s(G)s(G
2
pd
2
pdpc
)1s(s
)KsK(20
)5s2s)(1s(
)2s(20
)2s(s
)5s2s)(KsK()s(G)s(G
ip
2
2ip
pc
1. Seçenek:
2. Seçenek:
5.2.4 Kutup-Sıfır İptali ile Kontrol Sistemi Tasarımı


R(s) Y(s)K
H(s)
+
-
G(s) 1)s(H,)4s(s
1)s(G
6.1 Köklerin Yer Eğrisi: Örnek: İkinci Dereceden bir Sistemin KYE
Bölüm 6
Köklerin Yer Eğrisi ve Kontrol Sistemlerinin Analizi
6.1.3 Açı ve Genlik Koşulu
Karmaşık bir s değişkeni için transfer fonksiyonu da karmaşıktır. Karmaşık ifadeler ise
kutupsal olarak genlikleri ve açıları ile gösterilebilir.
Örneğin,
Ek bilgi:
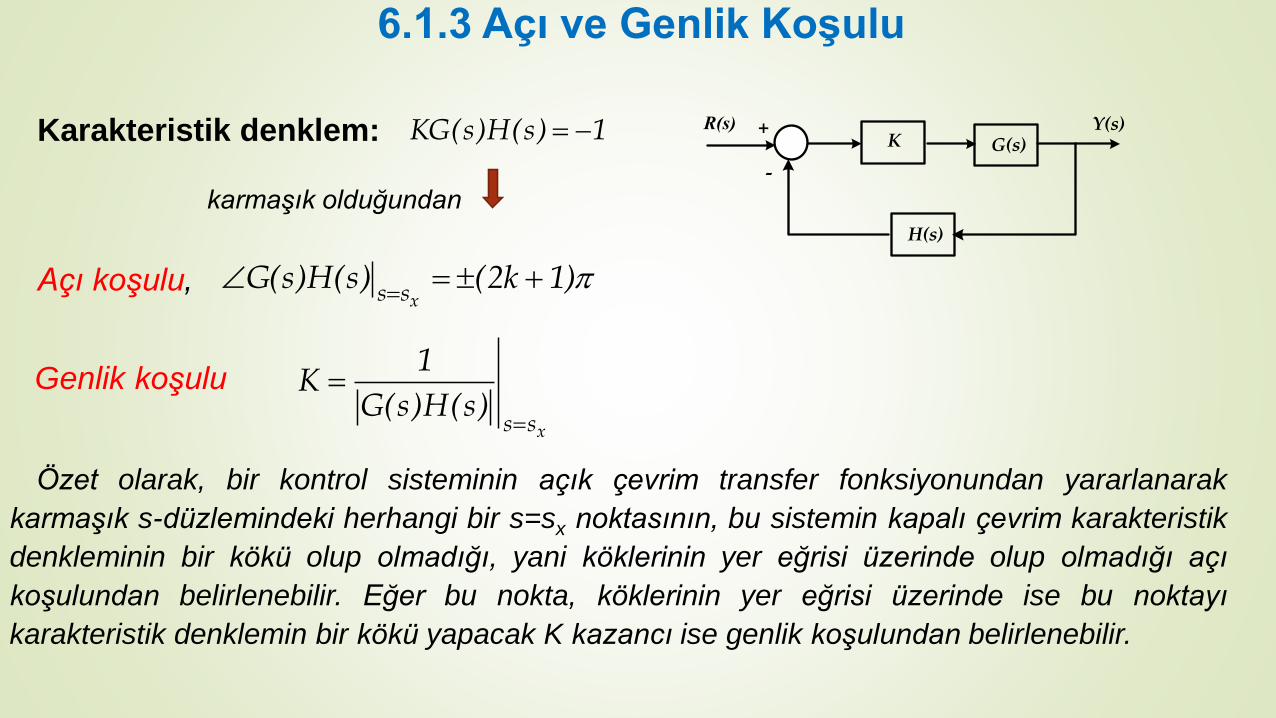
1)s(H)s(KG Karakteristik denklem:
)1k2()s(H)s(Gxss
Açı koşulu,
xss)s(H)s(G
1K
Genlik koşulu
Özet olarak, bir kontrol sisteminin açık çevrim transfer fonksiyonundan yararlanarak
karmaşık s-düzlemindeki herhangi bir s=sx noktasının, bu sistemin kapalı çevrim karakteristik
denkleminin bir kökü olup olmadığı, yani köklerinin yer eğrisi üzerinde olup olmadığı açı
koşulundan belirlenebilir. Eğer bu nokta, köklerinin yer eğrisi üzerinde ise bu noktayı
karakteristik denklemin bir kökü yapacak K kazancı ise genlik koşulundan belirlenebilir.
karmaşık olduğundan
R(s) Y(s)K
H(s)
+
-
G(s)
6.1.3 Açı ve Genlik Koşulu

Kutup ve Sıfır Vektörlerinden Açı ve Genlik Koşulu
A1
sx
z10
jw
z2
p2
p3
p1
A2
B2
B1
B3
32121ss x)s(H)s(G
Açık Çevrim Transfer fonksiyonunun açısı
(Açı koşulu)
Açık çevrim transfer fonksiyonunun genliği
ve genlik koşulu,
321
21
BBB
AA)s(H)s(G
Seçilen bir test noktasına, kutup ve sıfır vektörleri çizilir ve elde edilen dik
üçgenlerden yararlanarak açı ve genlik koşulu hesaplanabilir.
21
321
AA
BBB
)s(H)s(G
1K

Örnek Şekildeki kontrol sisteminin açık çevrim transfer fonksiyonu verilmiştir. a-) s= -2 b-) s=
-1+j1 noktası, bu sistemin KYE üzerinde midir? Eğer bu nokta sistemin KYE üzerinde ise
KYE’ni bu noktada geçiren (bu noktayı karakteristik denklemin bir kökü yapan) K kazancı
nedir?R(s) Y(s)
K
H(s)
+
-
G(s) 1)s(H,1s
s)s(G
2
R(s) Y(s)K
H(s)
+
-
G(s)
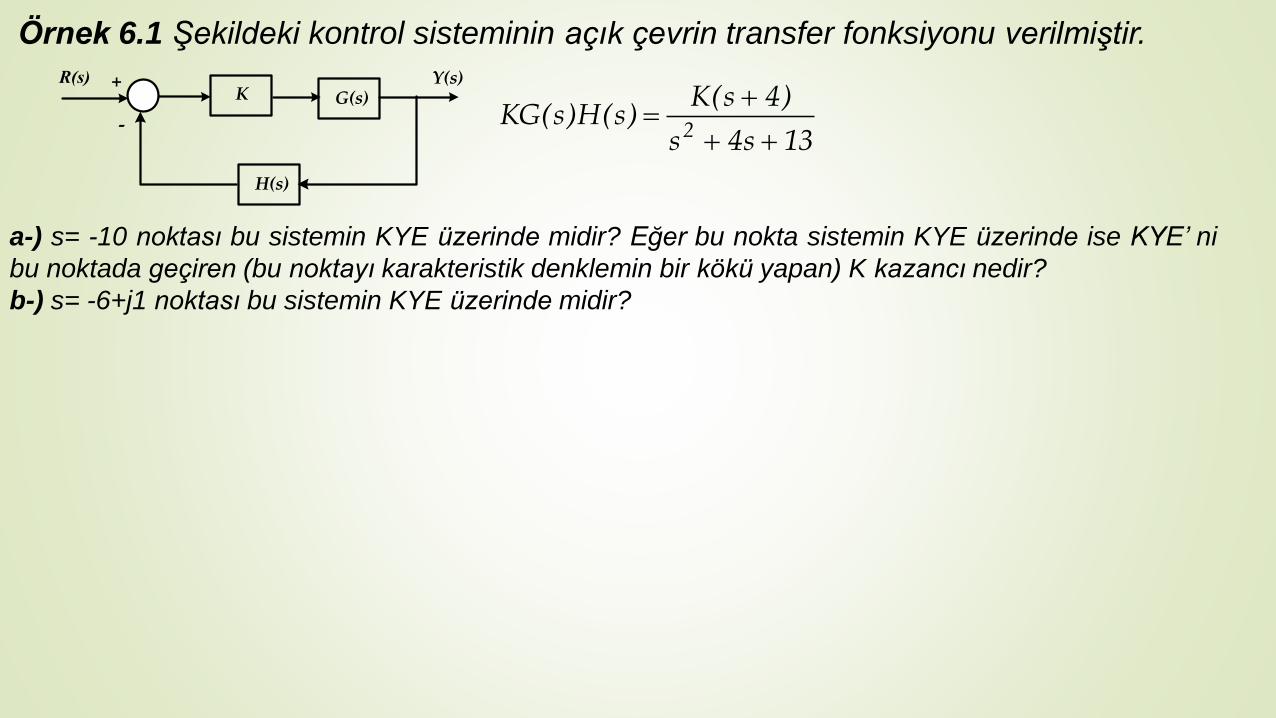
13s4s
)4s(K)s(H)s(KG
2
Örnek 6.1 Şekildeki kontrol sisteminin açık çevrin transfer fonksiyonu verilmiştir.
a-) s= -10 noktası bu sistemin KYE üzerinde midir? Eğer bu nokta sistemin KYE üzerinde ise KYE’ ni
bu noktada geçiren (bu noktayı karakteristik denklemin bir kökü yapan) K kazancı nedir?
b-) s= -6+j1 noktası bu sistemin KYE üzerinde midir?
-3
-2
-1
sx=-10 0
jw
z=-4
p2
p1
A
B2
B1 2
1
3
-3
-2
-1
sx=-6+j1
0
jw
z=-4
p2
p1
A
B2
B1
2
1
3
-2-2
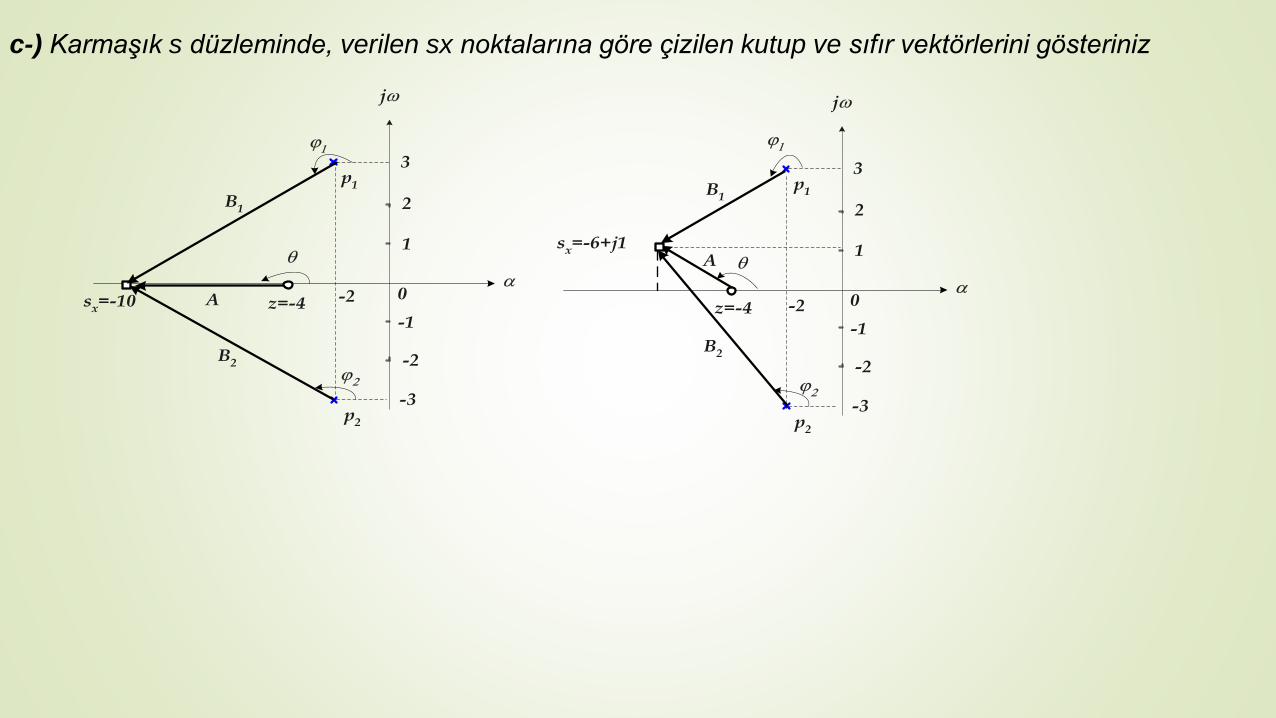
c-) Karmaşık s düzleminde, verilen sx noktalarına göre çizilen kutup ve sıfır vektörlerini gösteriniz
6.2 Köklerin Yer Eğrilerinin Çizim Kuralları
6.2.1 Açık Çevrim Transfer Fonksiyonunda Kazanç Çarpanı
Örnek 6.2 Açık çevrim transfer fonksiyonu verilen sistemde K değişkenini kazanç durumuna
getiriniz.
2s4s
1Ks)s(H)s(G
2
6.2.2 Köklerin Yer Eğrisinin Başlangıç ve Bitiş Noktaları
K=0 için karakteristik denklemin kökleri, açık çevrimin kutuplarına eşittir.
K için karakteristik denklemin kökleri, açık çevrimin sıfırlarına eşittir.
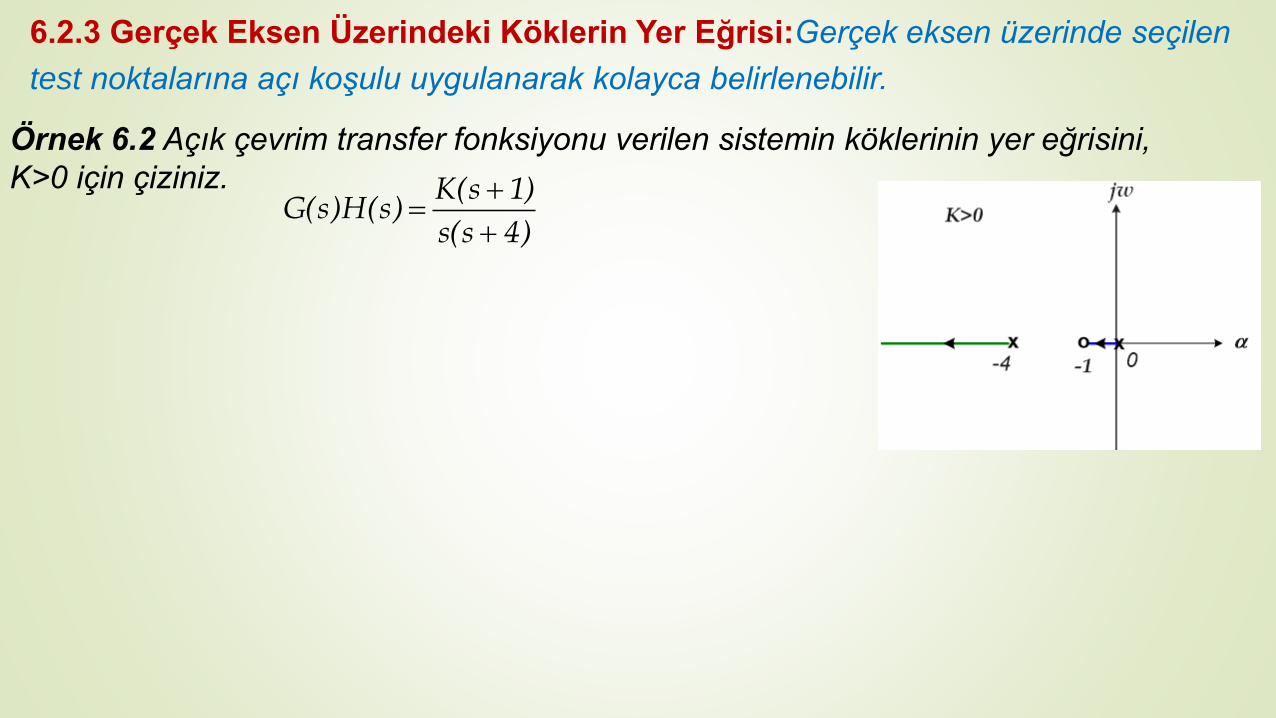
6.2.3 Gerçek Eksen Üzerindeki Köklerin Yer Eğrisi:Gerçek eksen üzerinde seçilen
test noktalarına açı koşulu uygulanarak kolayca belirlenebilir.
Örnek 6.2 Açık çevrim transfer fonksiyonu verilen sistemin köklerinin yer eğrisini,
K>0 için çiziniz.
)4s(s
)1s(K)s(H)s(G
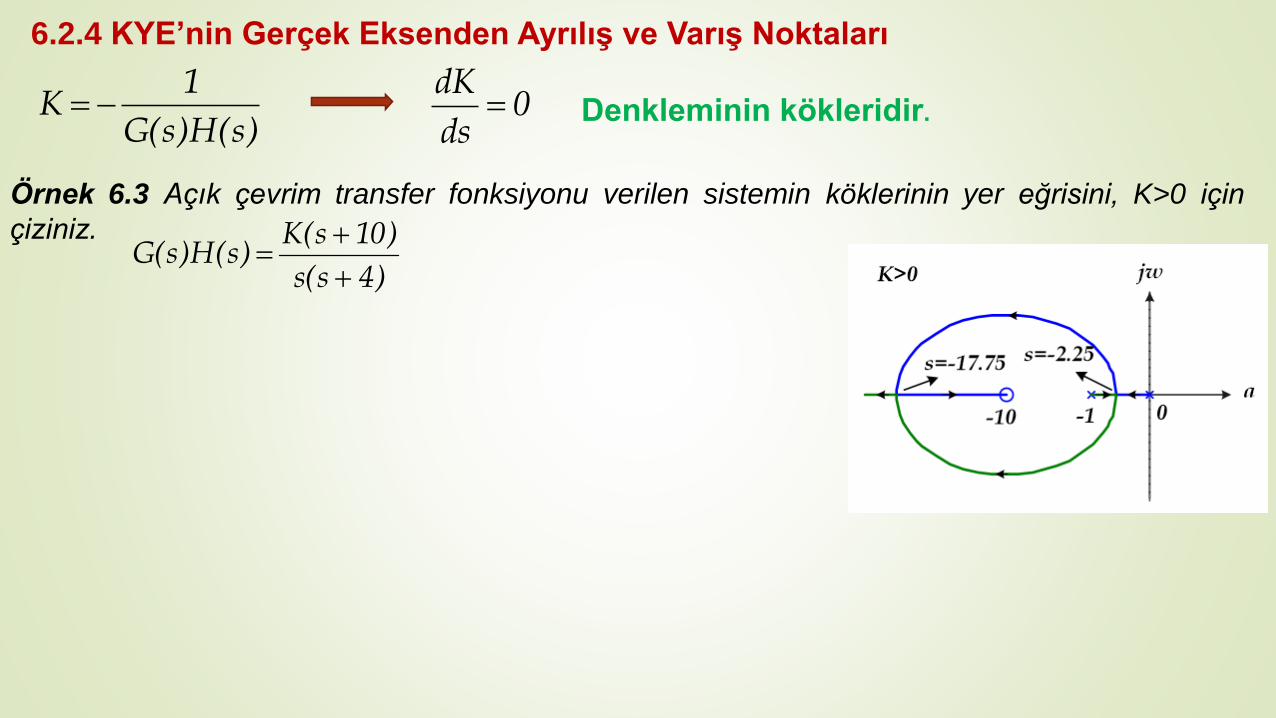
)s(H)s(G
1K 0
ds
dK Denkleminin kökleridir.
6.2.4 KYE’nin Gerçek Eksenden Ayrılış ve Varış Noktaları
Örnek 6.3 Açık çevrim transfer fonksiyonu verilen sistemin köklerinin yer eğrisini, K>0 için
çiziniz.
)4s(s
)10s(K)s(H)s(G

0Kmn
k2,0K
mn
)1k2(
Asimptotların açıları:
Asimptotların gerçek ekseni kestiği nokta:
mn
zRepRem
1ii
n
1jj
a
6.2.5 KYE Dallarının Yaklaştığı Asimptotlar
)4s)(2s(s
K)s(H)s(G
Örnek:
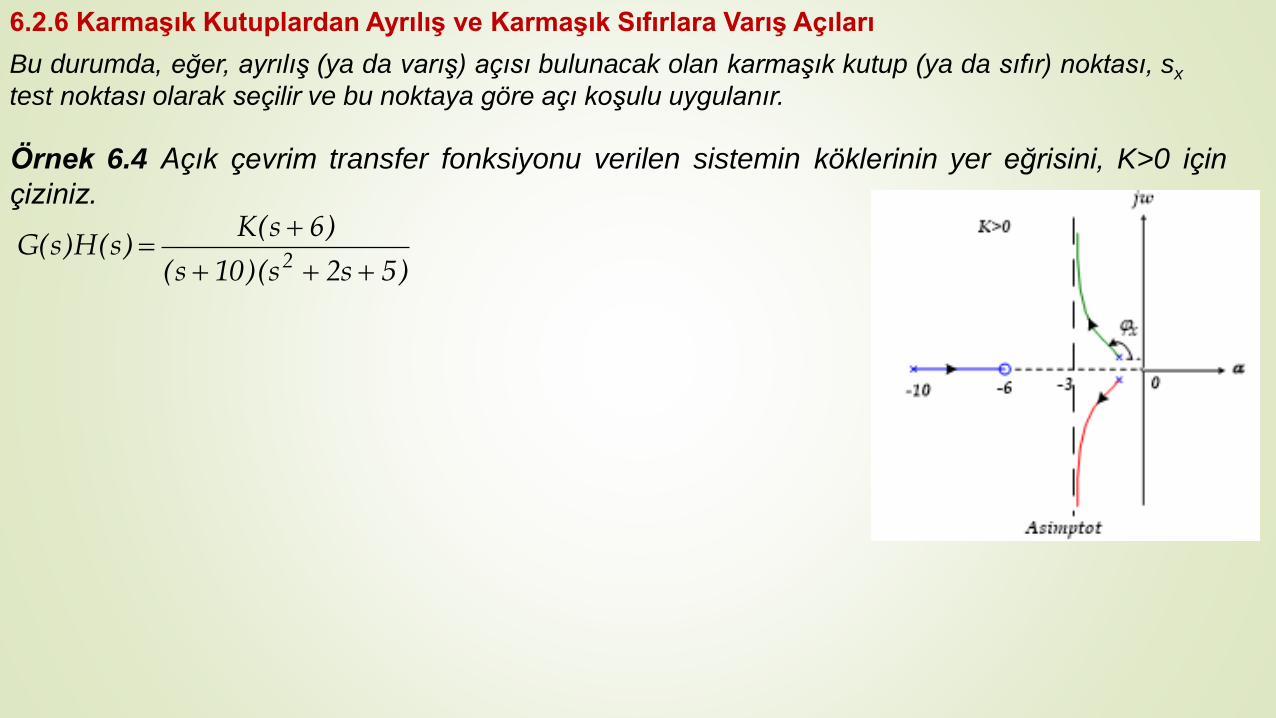
Örnek 6.4 Açık çevrim transfer fonksiyonu verilen sistemin köklerinin yer eğrisini, K>0 için
çiziniz.
)5s2s)(10s(
)6s(K)s(H)s(G
2
Bu durumda, eğer, ayrılış (ya da varış) açısı bulunacak olan karmaşık kutup (ya da sıfır) noktası, sx
test noktası olarak seçilir ve bu noktaya göre açı koşulu uygulanır.
6.2.6 Karmaşık Kutuplardan Ayrılış ve Karmaşık Sıfırlara Varış Açıları
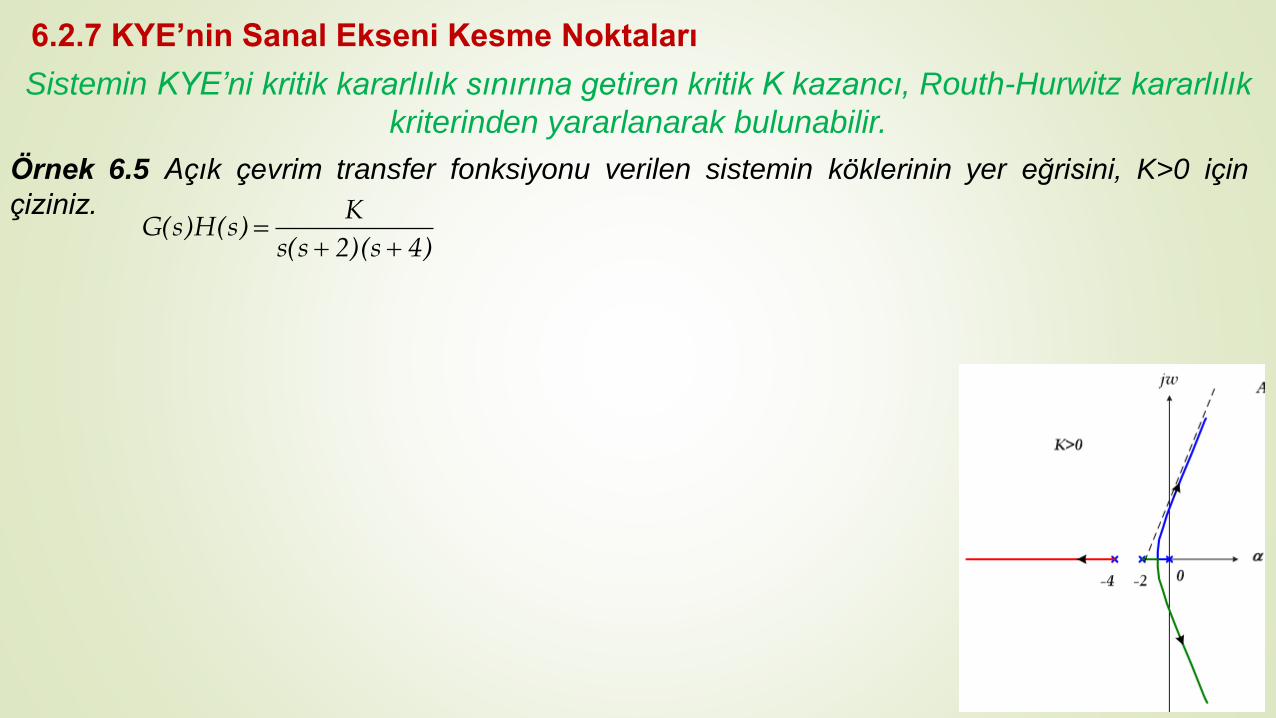
6.2.7 KYE’nin Sanal Ekseni Kesme Noktaları
Sistemin KYE’ni kritik kararlılık sınırına getiren kritik K kazancı, Routh-Hurwitz kararlılık
kriterinden yararlanarak bulunabilir.
Örnek 6.5 Açık çevrim transfer fonksiyonu verilen sistemin köklerinin yer eğrisini, K>0 için
çiziniz.
)4s)(2s(s
K)s(H)s(G
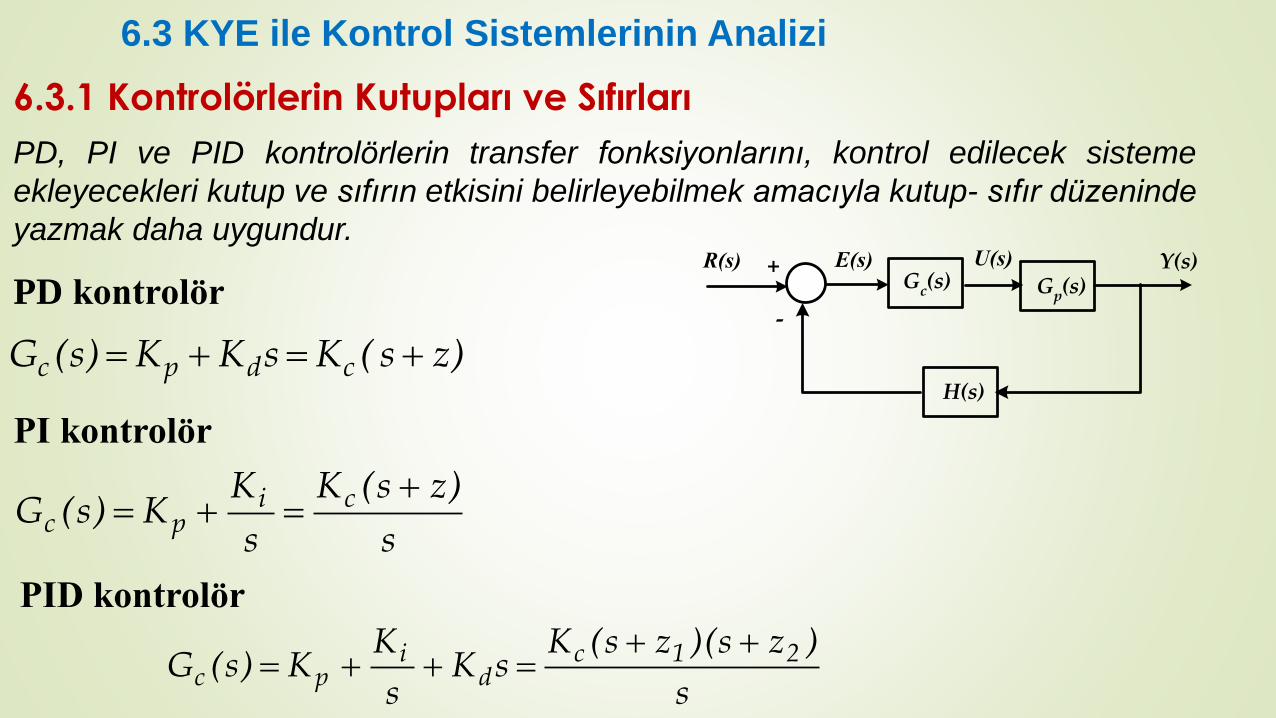
PD, PI ve PID kontrolörlerin transfer fonksiyonlarını, kontrol edilecek sisteme
ekleyecekleri kutup ve sıfırın etkisini belirleyebilmek amacıyla kutup- sıfır düzeninde
yazmak daha uygundur.
6.3 KYE ile Kontrol Sistemlerinin Analizi
)zs(KsKK)s(G cdpc
s
)zs(K
s
KK)s(G ci
pc
s
)zs)(zs(KsK
s
KK)s(G 21c
di
pc
PID kontrolör
PI kontrolör
PD kontrolör
6.3.1 Kontrolörlerin Kutupları ve Sıfırları
R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)
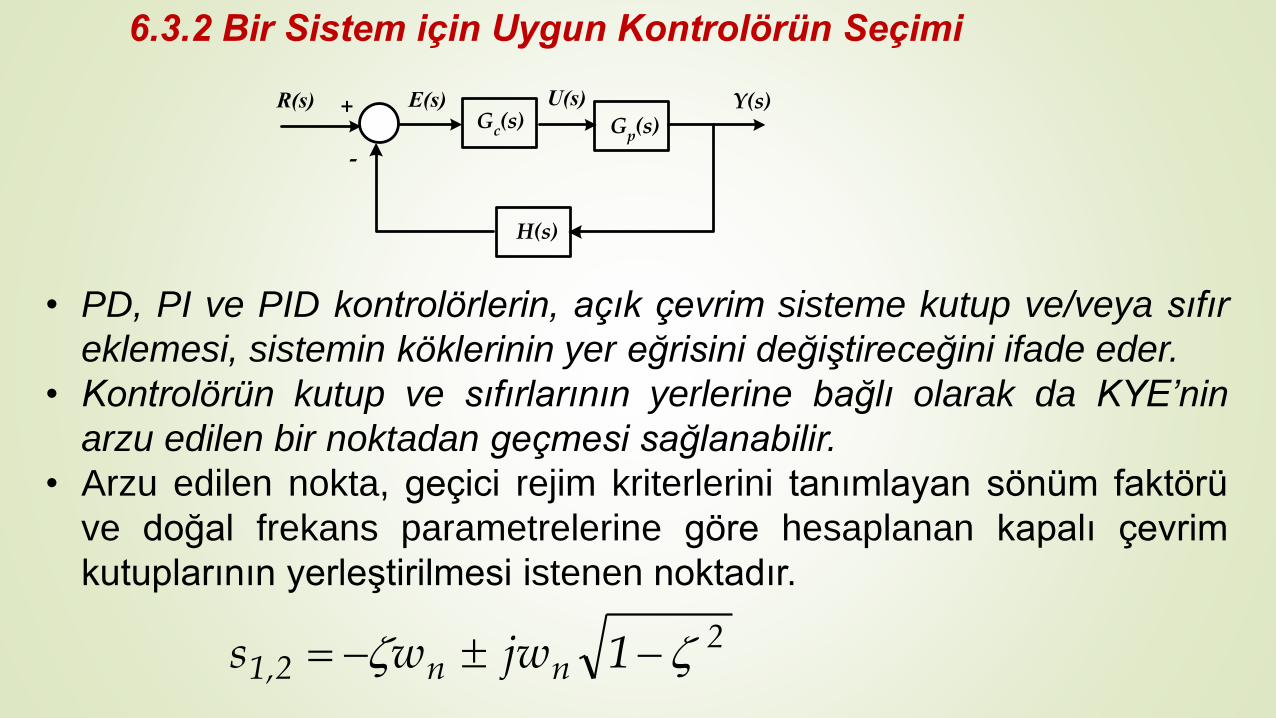
• PD, PI ve PID kontrolörlerin, açık çevrim sisteme kutup ve/veya sıfır
eklemesi, sistemin köklerinin yer eğrisini değiştireceğini ifade eder.
• Kontrolörün kutup ve sıfırlarının yerlerine bağlı olarak da KYE’nin
arzu edilen bir noktadan geçmesi sağlanabilir.
• Arzu edilen nokta, geçici rejim kriterlerini tanımlayan sönüm faktörü
ve doğal frekans parametrelerine göre hesaplanan kapalı çevrim
kutuplarının yerleştirilmesi istenen noktadır.
2nn2,1 1jwws
R(s) E(s) Y(s)Gc(s)
H(s)
+
-
Gp(s)U(s)
6.3.2 Bir Sistem için Uygun Kontrolörün Seçimi
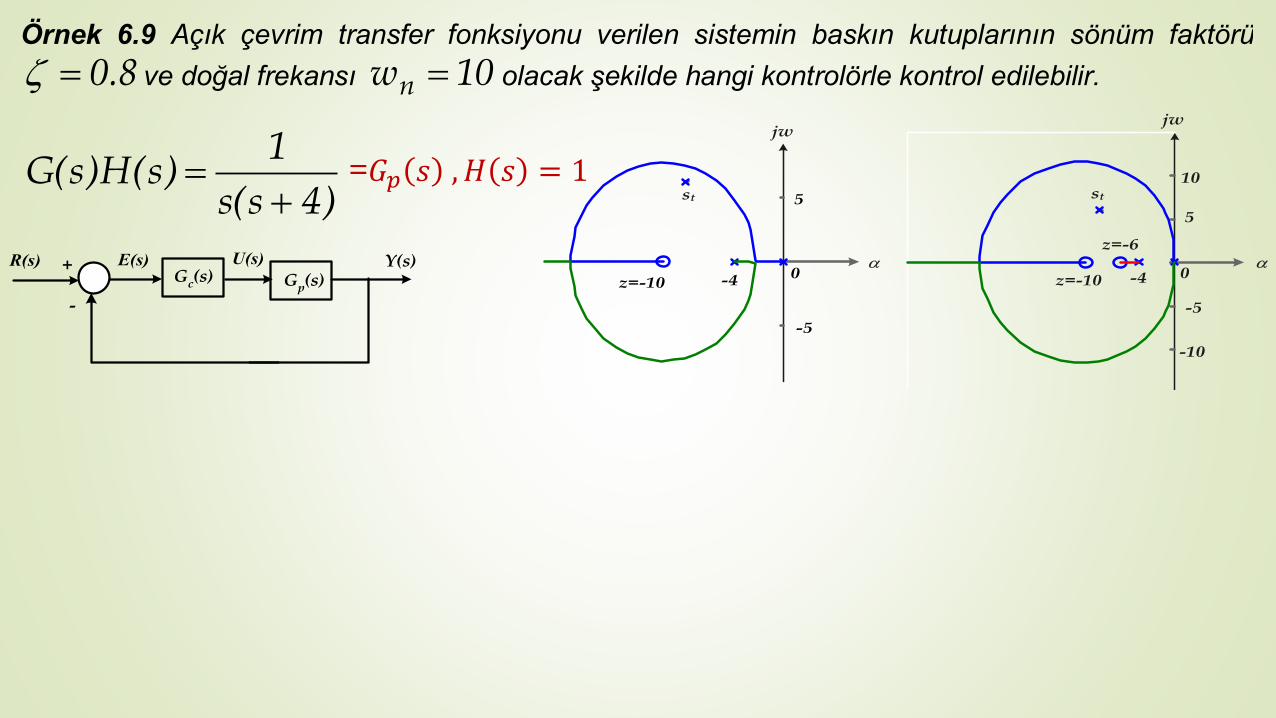
Örnek 6.9 Açık çevrim transfer fonksiyonu verilen sistemin baskın kutuplarının sönüm faktörü
8.0 ve doğal frekansı 10wn olacak şekilde hangi kontrolörle kontrol edilebilir.
)4s(s
1)s(H)s(G
st
jw
z=-10 -4
-5
0
5
-4z=-10
z=-6
0
-10
-5
5
10
jw
st
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
=𝐺𝑝 𝑠 , 𝐻 𝑠 = 1
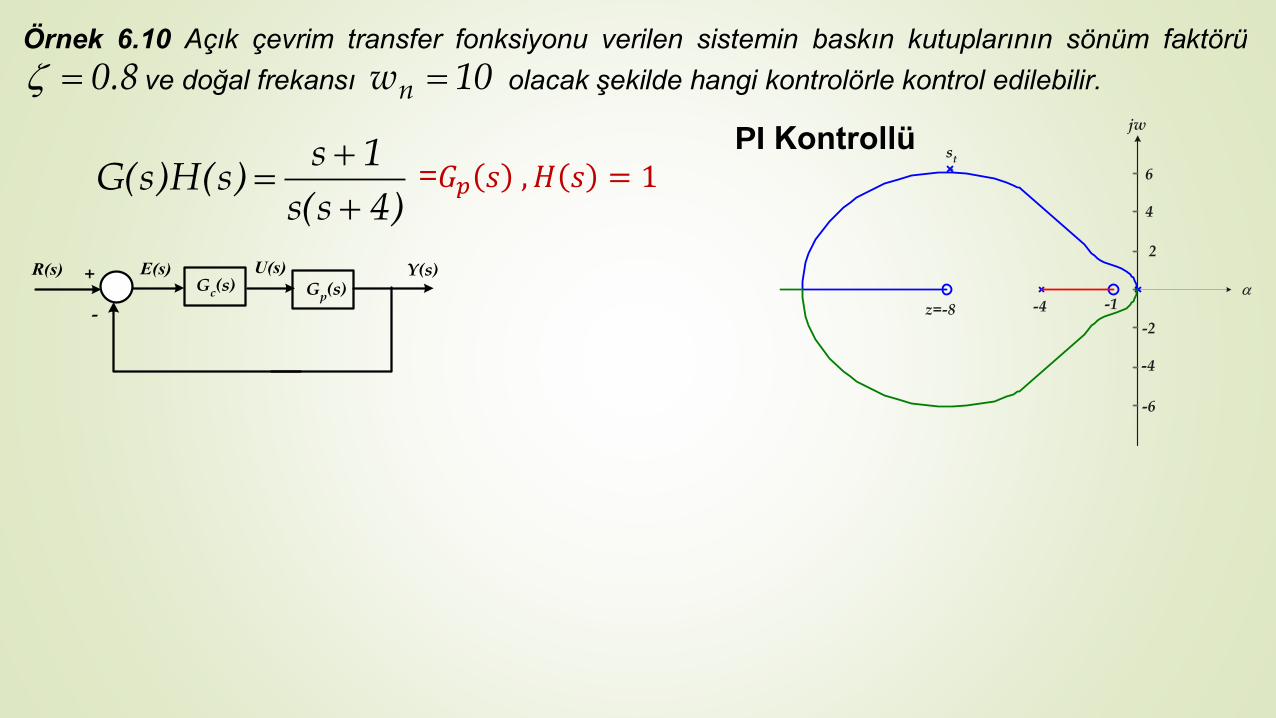
Örnek 6.10 Açık çevrim transfer fonksiyonu verilen sistemin baskın kutuplarının sönüm faktörü
8.0 ve doğal frekansı 10wn olacak şekilde hangi kontrolörle kontrol edilebilir.
)4s(s
1s)s(H)s(G
jw
st
z=-8 -4 -1
-6
-4
-2
2
4
6
PI Kontrollü
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
=𝐺𝑝 𝑠 , 𝐻 𝑠 = 1
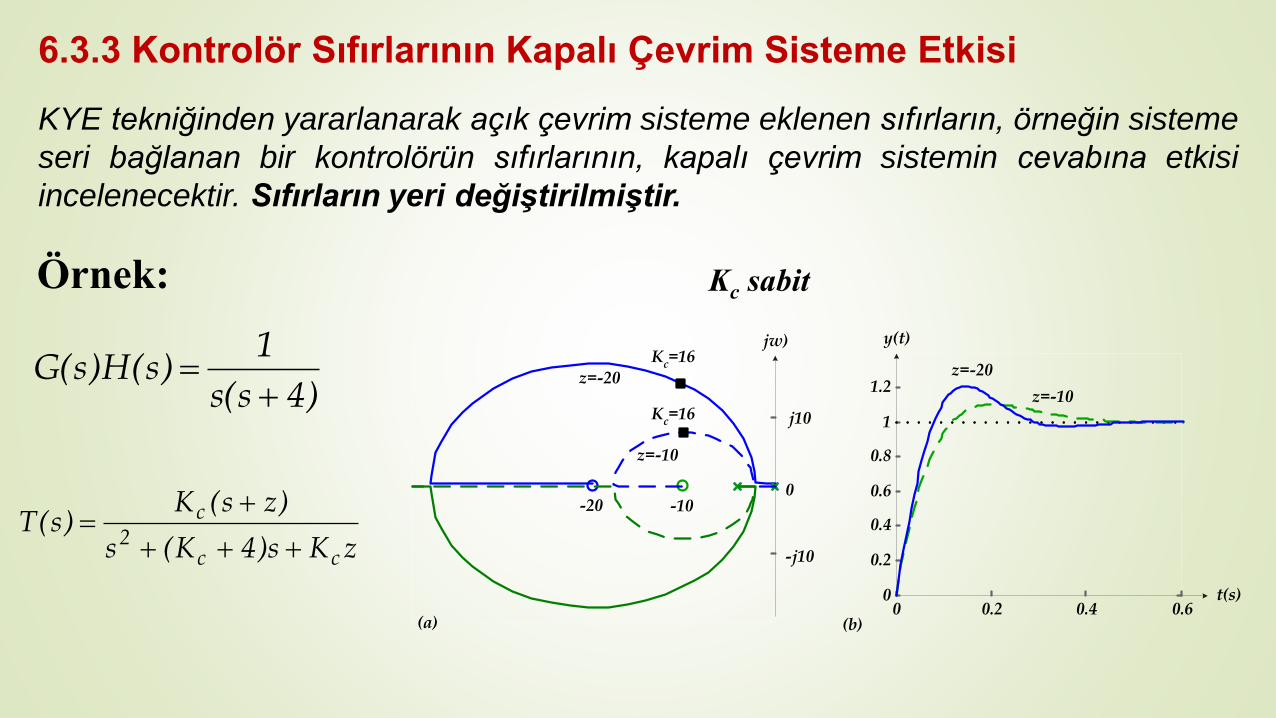
6.3.3 Kontrolör Sıfırlarının Kapalı Çevrim Sisteme Etkisi
KYE tekniğinden yararlanarak açık çevrim sisteme eklenen sıfırların, örneğin sisteme
seri bağlanan bir kontrolörün sıfırlarının, kapalı çevrim sistemin cevabına etkisi
incelenecektir. Sıfırların yeri değiştirilmiştir.
)4s(s
1)s(H)s(G
zKs)4K(s
)zs(K)s(T
cc2
c
0 0.2 0.4 0.60
0.2
0.4
0.6
0.8
1
1.2
-20 -100
-j10
j10
y(t) Kc=16
Kc=16
z=-20
z=-10
t(s)
jw)
z=-10
z=-20
(a) (b)
Örnek: Kc sabit

Örnek: Aşağıda verilen sistemi ele alalım.
)10s)(8s(s
1)s(H)s(G
y(t)
Kc=240 Kc=240 z=-6
z=-3
t(s)
jw
z=-6 z=-3
-10 -8 -6 -3
-j20
-j10
0
j10
j20
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1.2
(a) (b)
Sıfırların yeri değiştirilmiştir.Kc sabit

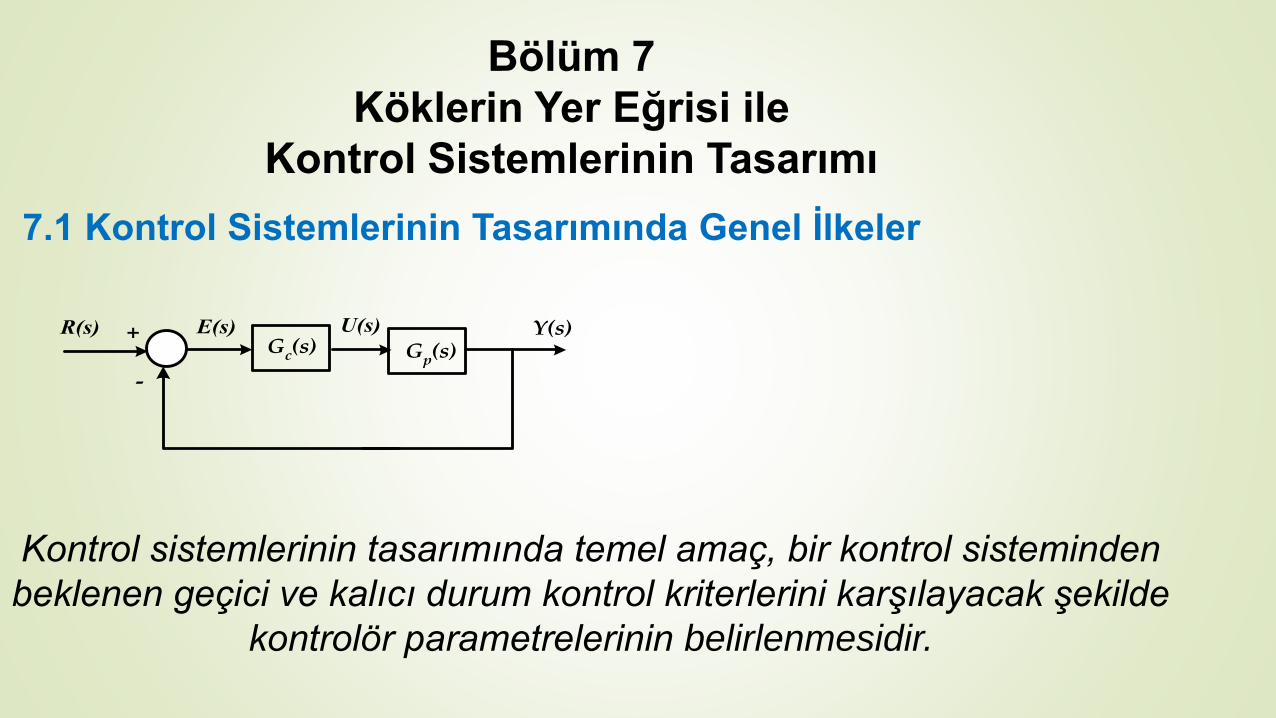
Kontrol sistemlerinin tasarımında temel amaç, bir kontrol sisteminden
beklenen geçici ve kalıcı durum kontrol kriterlerini karşılayacak şekilde
kontrolör parametrelerinin belirlenmesidir.
7.1 Kontrol Sistemlerinin Tasarımında Genel İlkeler
Bölüm 7
Köklerin Yer Eğrisi ile
Kontrol Sistemlerinin Tasarımı
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)

7.1.1 Kontrolör ve Kompansatörlerin Açı Katkıları
)zs(K)s(G cc
PD
s
)zs(K)s(G c
c
PI
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)

Devam: Kontrolör ve Kompansatörlerin Açı Katkıları
PID
s
)zs)(zs(K)s(G 21c
c
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
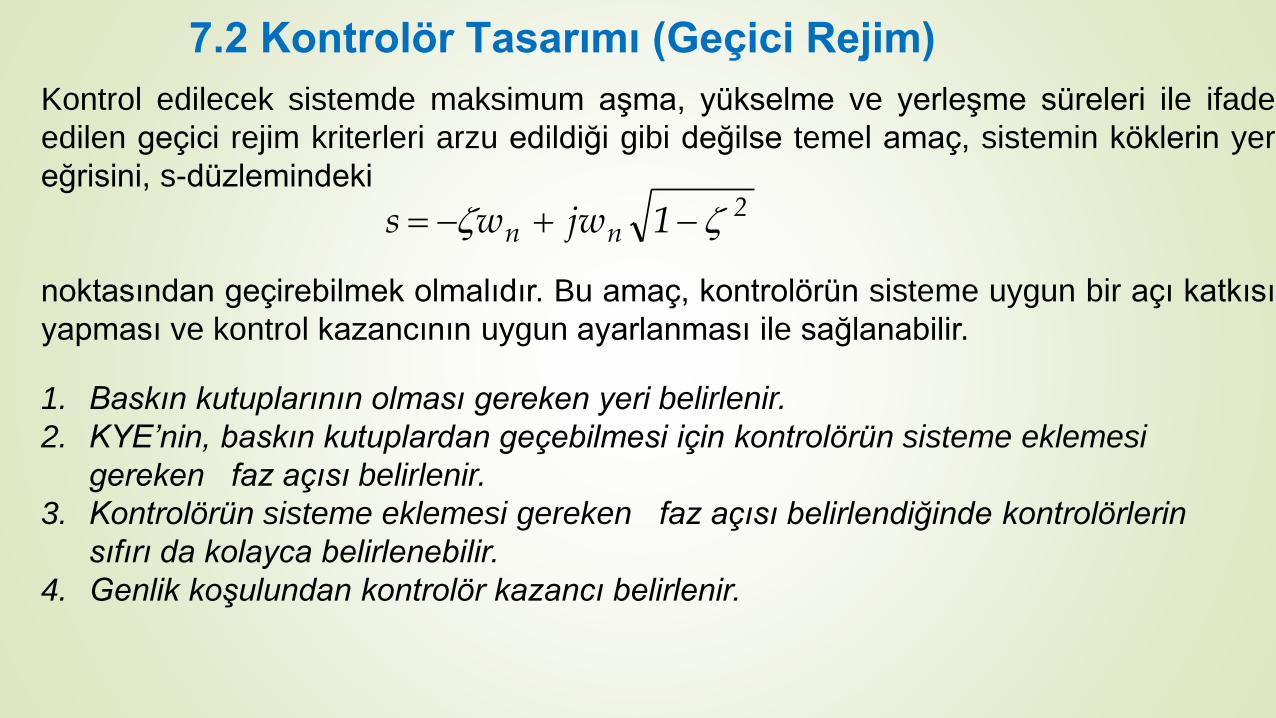
7.2 Kontrolör Tasarımı (Geçici Rejim)
2nn 1jwws
Kontrol edilecek sistemde maksimum aşma, yükselme ve yerleşme süreleri ile ifade
edilen geçici rejim kriterleri arzu edildiği gibi değilse temel amaç, sistemin köklerin yer
eğrisini, s-düzlemindeki
noktasından geçirebilmek olmalıdır. Bu amaç, kontrolörün sisteme uygun bir açı katkısı
yapması ve kontrol kazancının uygun ayarlanması ile sağlanabilir.
1. Baskın kutuplarının olması gereken yeri belirlenir.
2. KYE’nin, baskın kutuplardan geçebilmesi için kontrolörün sisteme eklemesi
gereken faz açısı belirlenir.
3. Kontrolörün sisteme eklemesi gereken faz açısı belirlendiğinde kontrolörlerin
sıfırı da kolayca belirlenebilir.
4. Genlik koşulundan kontrolör kazancı belirlenir.
0 0.2 0.4 0.6 0.80
0.2
0.4
0.6
0.8
1
1.2
y(t)
z=-14 z=-8
t(s)
Referans sistem
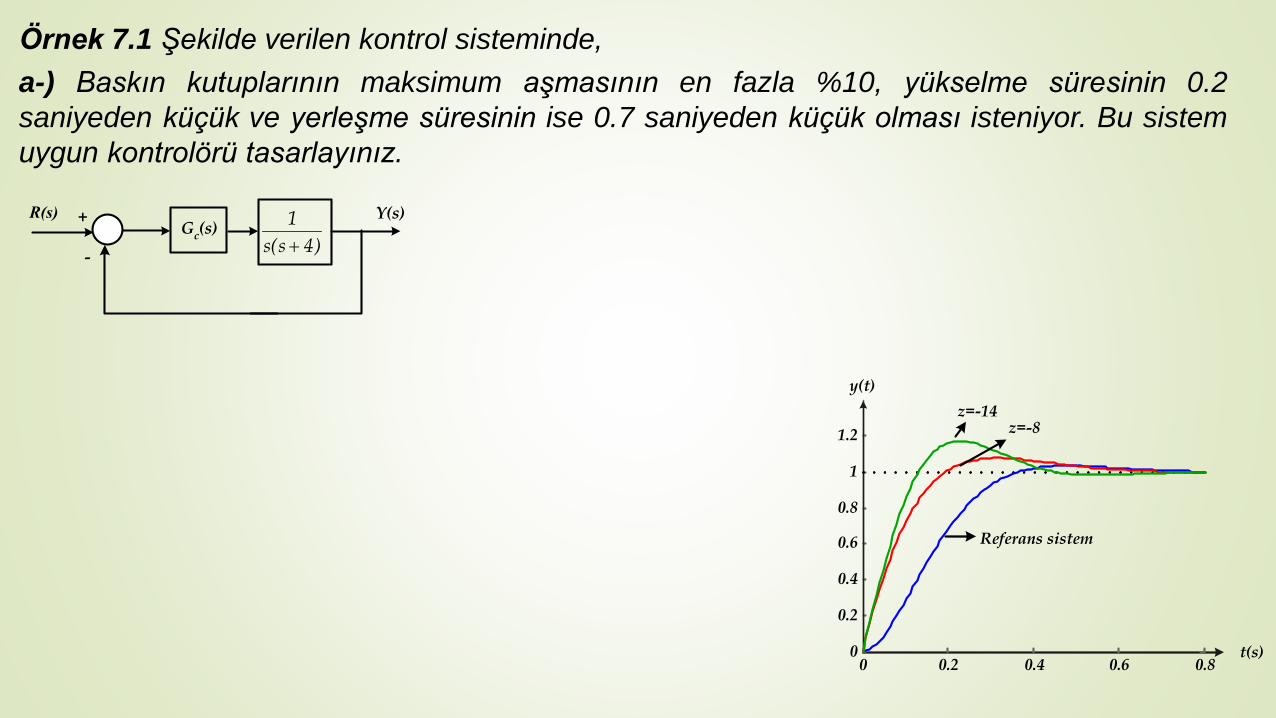
Örnek 7.1 Şekilde verilen kontrol sisteminde,
a-) Baskın kutuplarının maksimum aşmasının en fazla %10, yükselme süresinin 0.2
saniyeden küçük ve yerleşme süresinin ise 0.7 saniyeden küçük olması isteniyor. Bu sistem
uygun kontrolörü tasarlayınız.
R(s) Y(s)Gc(s)
+
-)4s(s
1
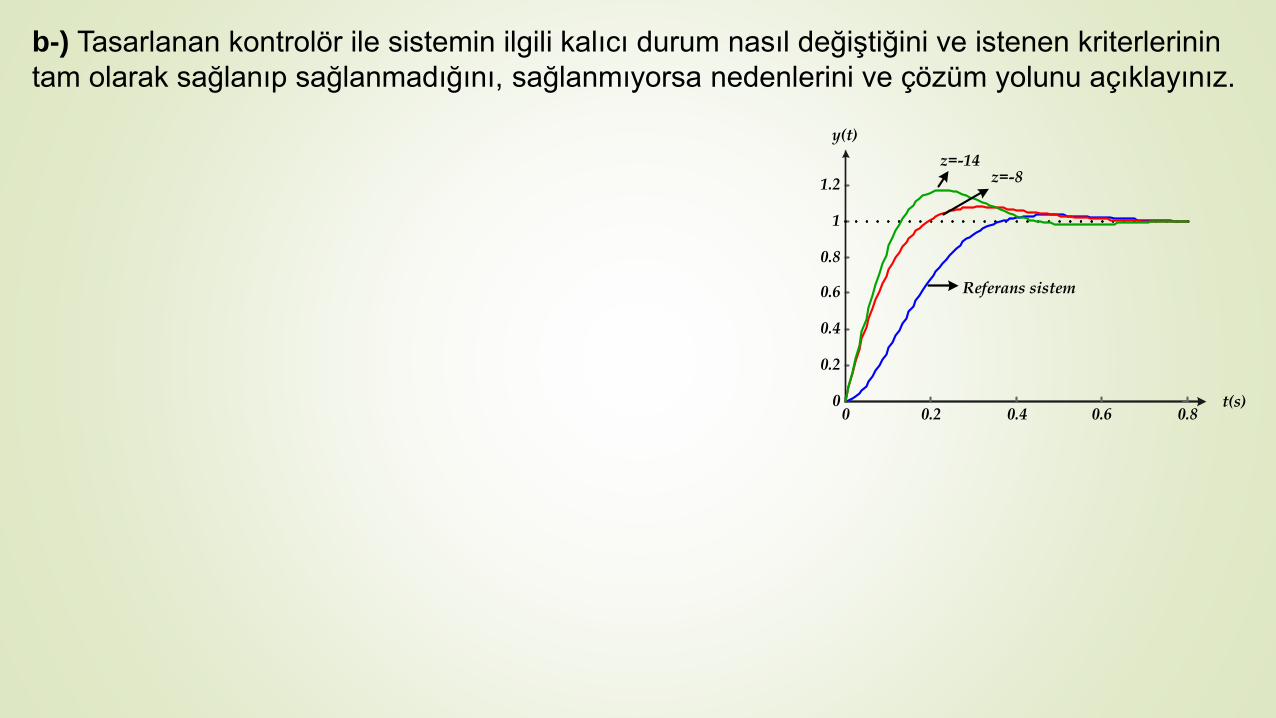
b-) Tasarlanan kontrolör ile sistemin ilgili kalıcı durum nasıl değiştiğini ve istenen kriterlerinin
tam olarak sağlanıp sağlanmadığını, sağlanmıyorsa nedenlerini ve çözüm yolunu açıklayınız.
0 0.2 0.4 0.6 0.80
0.2
0.4
0.6
0.8
1
1.2
y(t)
z=-14 z=-8
t(s)
Referans sistem
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1.2
y(t)
t(s)
Referans sistem
z=-5z=-7.895
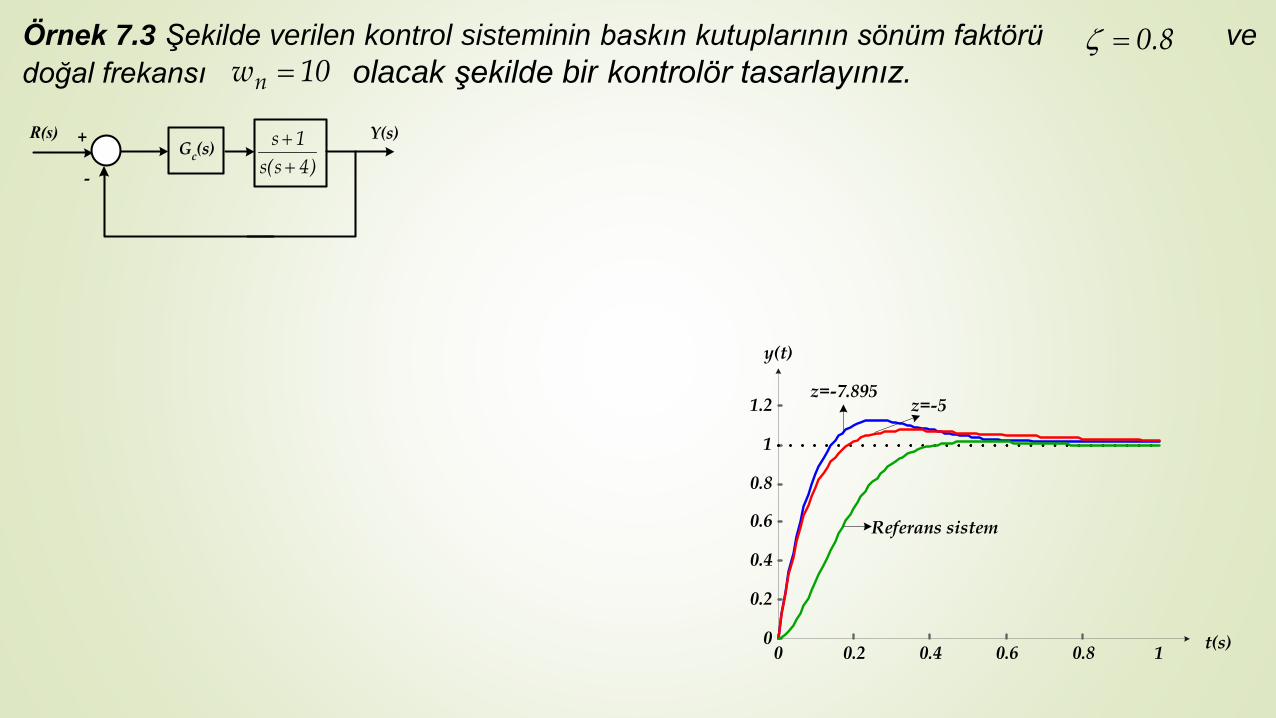
8.010wn
Örnek 7.3 Şekilde verilen kontrol sisteminin baskın kutuplarının sönüm faktörü ve
doğal frekansı olacak şekilde bir kontrolör tasarlayınız.
R(s) Y(s)Gc(s)
+
-)4s(s
1s
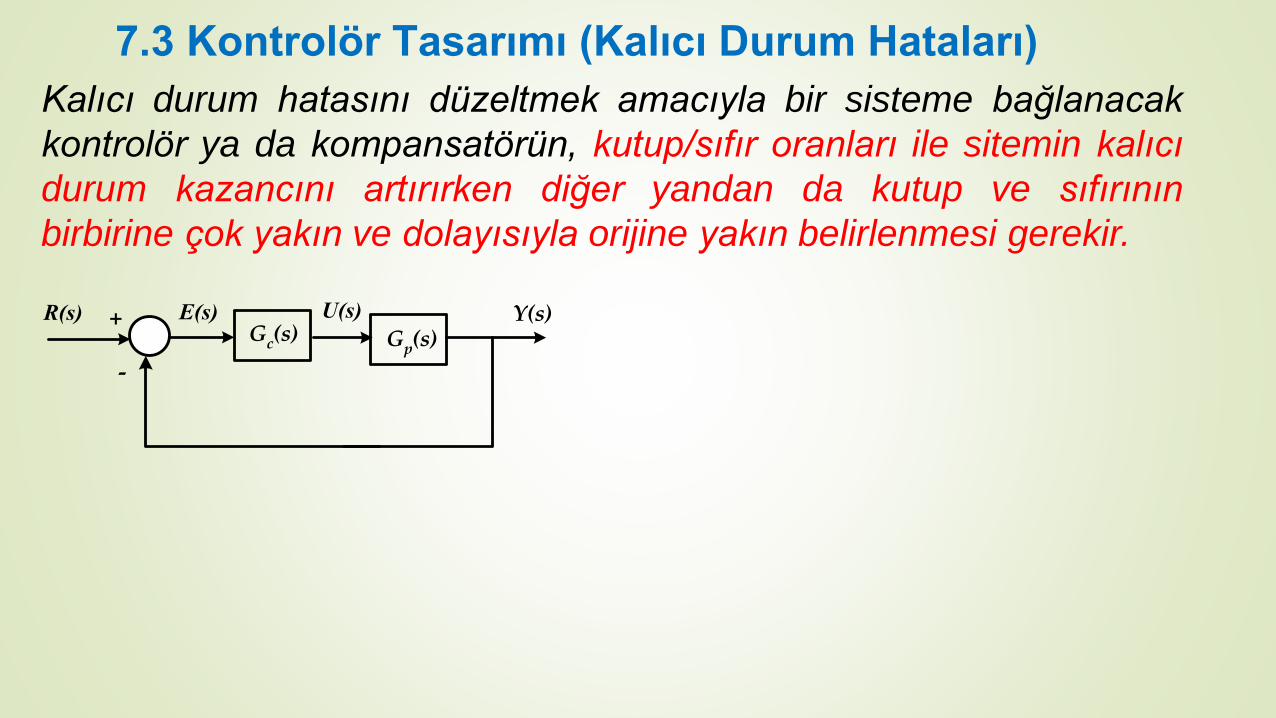
7.3 Kontrolör Tasarımı (Kalıcı Durum Hataları)
Kalıcı durum hatasını düzeltmek amacıyla bir sisteme bağlanacak
kontrolör ya da kompansatörün, kutup/sıfır oranları ile sitemin kalıcı
durum kazancını artırırken diğer yandan da kutup ve sıfırının
birbirine çok yakın ve dolayısıyla orijine yakın belirlenmesi gerekir.
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)

Örnek 7.7 Açık çevrim transfer fonksiyonu verilen sistemin geçici rejim davranışı yeterli görülmekte
ancak rampa hatasının sıfır yani vK ya da en azından 100K v olması istenmektedir. PI ya
da FGK’ü tasarlayınız.
)4s(s
)6s(5)s(H)s(G
-6 -4
-j4
-j2
0
j2
j4
jw
st
-6 -4
-j4
-j2
0
j2
j4
jw
st
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
7.4 PID Kontrolör
Bir kontrol sisteminde hem geçici rejim kriterlerinin hem de kalıcı durum
hatalarının yeterli olmaması durumunda genellikle PID kontrolörlerin
tasarlanması gerekir.
PID, oransal-türev ve oransal-integral bileşenlerinin her ikisini de ihtiva
ettiğinden genellikle bu kontrolörlerin bileşenleri de ayrı ayrı tasarlanabilir.
Örneğin, PD bileşen, geçici rejim kriterlerini ve PI bileşen ise kalıcı durum
hatalarını düzeltmek için tasarlanabilir.
t(s)
Referans sistem
y(t)
0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1
1.2PID kontrollü sistem z=-7.734
PID kontrollü sistem z=-4
R(s) Y(s)Gc(s)
+
- 5s2s
202
10wve7.0 n
pK
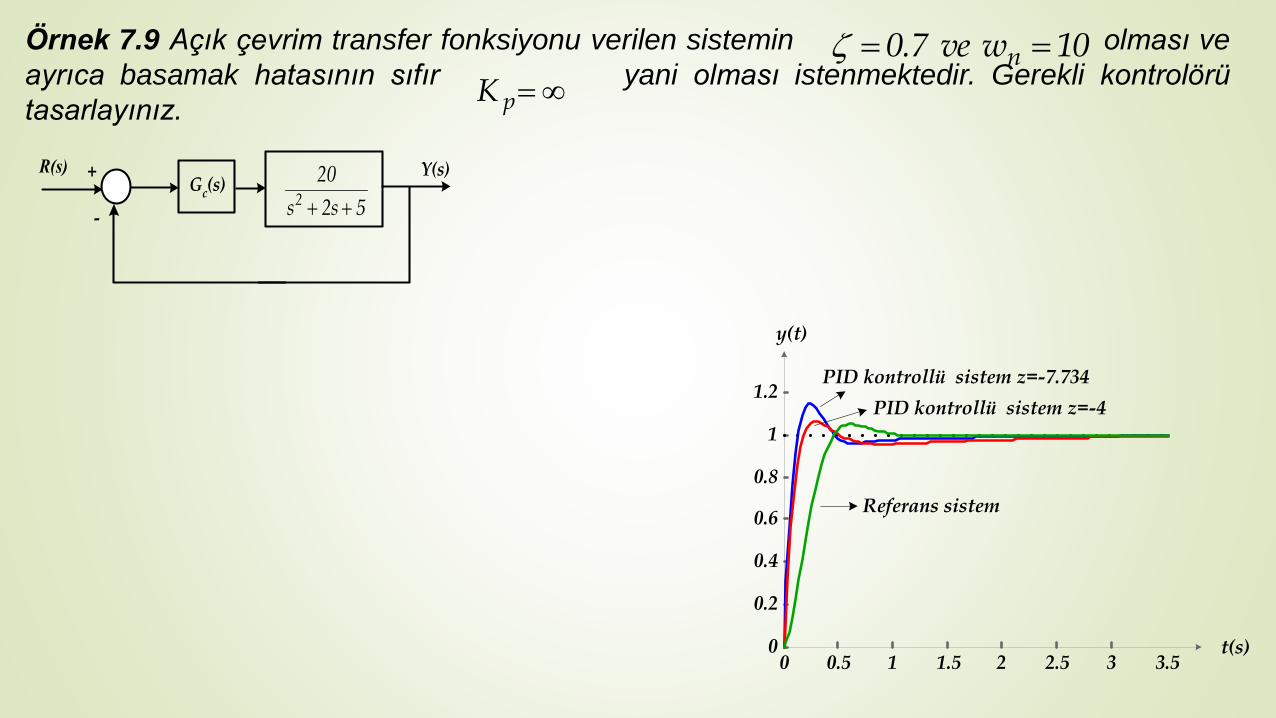
Örnek 7.9 Açık çevrim transfer fonksiyonu verilen sistemin olması ve
ayrıca basamak hatasının sıfır yani olması istenmektedir. Gerekli kontrolörü
tasarlayınız.
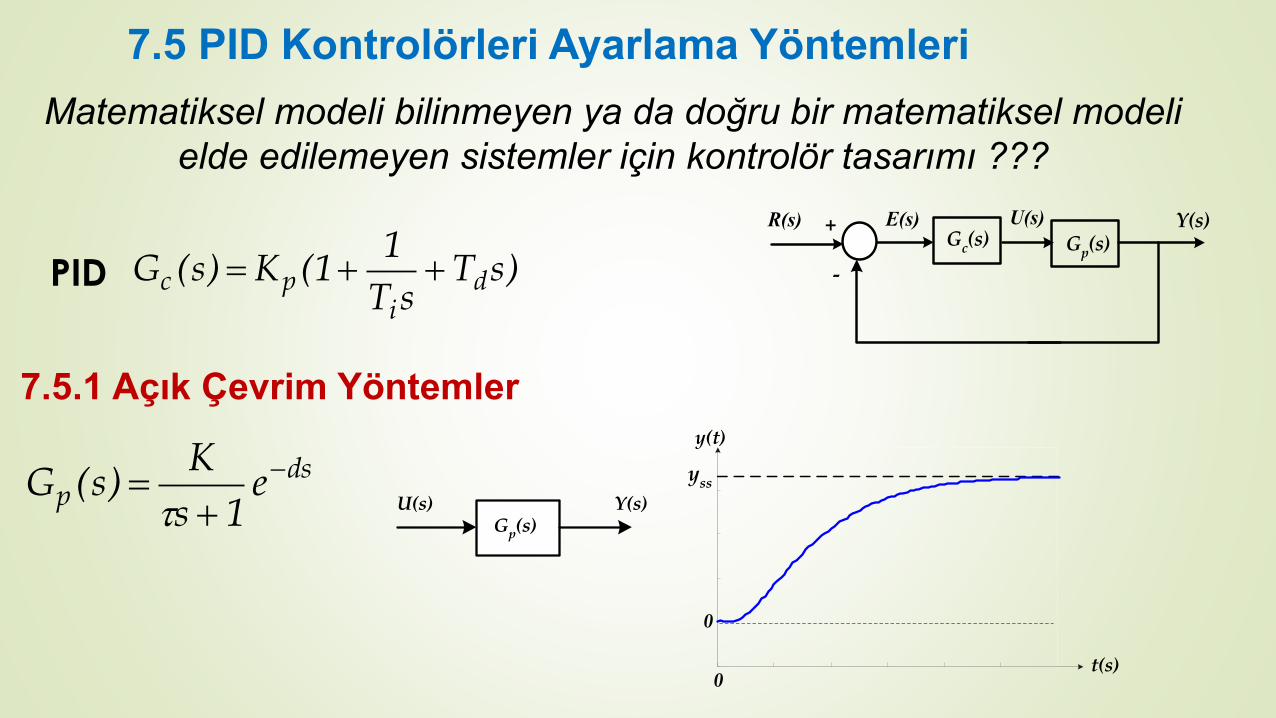
7.5 PID Kontrolörleri Ayarlama Yöntemleri
Matematiksel modeli bilinmeyen ya da doğru bir matematiksel modeli
elde edilemeyen sistemler için kontrolör tasarımı ???
)sTsT
11(K)s(G d
ipc PID
7.5.1 Açık Çevrim Yöntemler
0
0
yss
t(s)
y(t)
Gp(s)U(s) Y(s)
dsp e
1s
K)s(G
R(s) E(s) Y(s)Gc(s)
+
-
Gp(s)U(s)
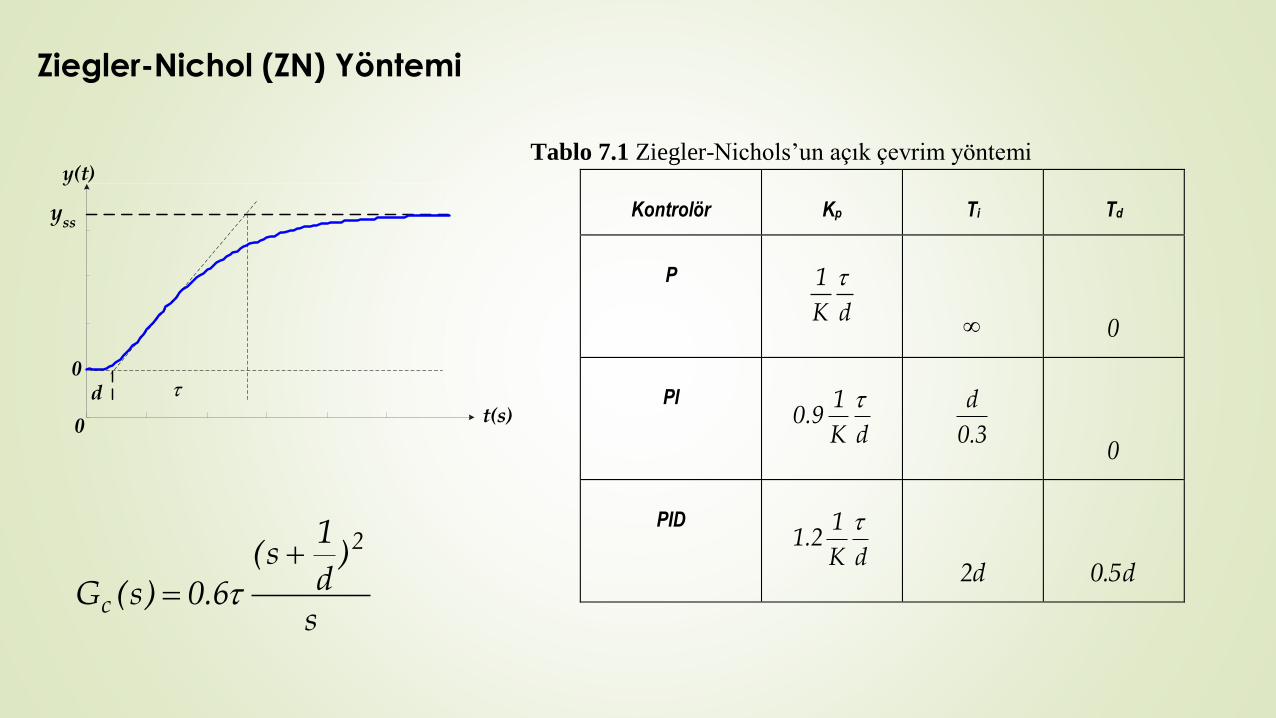
Ziegler-Nichol (ZN) Yöntemi
0
0
yss
t(s)
y(t)
d
Tablo 7.1 Ziegler-Nichols’un açık çevrim yöntemi
Kontrolör Kp Ti Td
P
dK
1
0
PI
dK
19.0
3.0
d
0
PID
dK
12.1
d2
d5.0
s
)d
1s(
6.0)s(G
2
c

Örnek 7.12 Şekilde bir sistemin birim basamak cevabı verilmiş ve üzerinde çeşitli noktalar işaretlenmiştir.
a-) Ziegler-Nichols‘un birinci yöntemi ile
b-) CHR yöntemi ile,
c-) Cohen-Coon Yöntemi ile bu sistem için bir PID kontrolör tasarlayınız
0 0.2 0.4 0.6 0.8 1 1.2 1.4 t(s)
0.2
0.4
0.6
0.8
1
y(t)
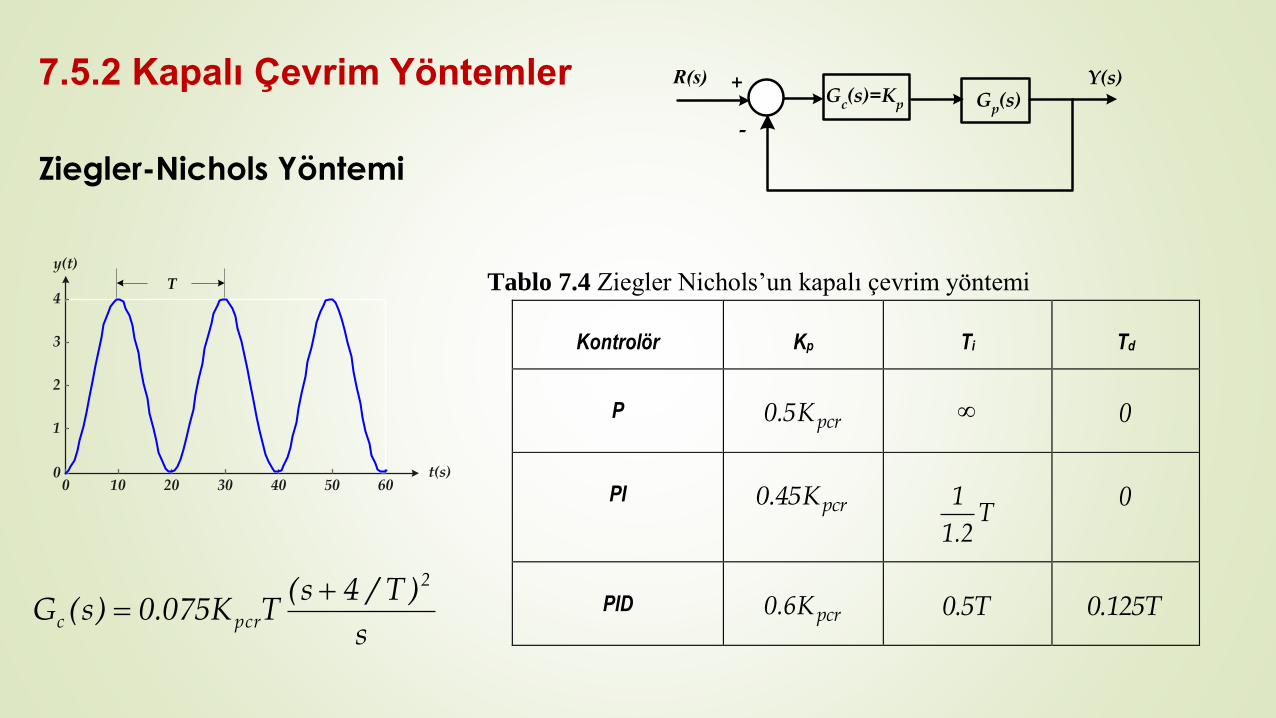
7.5.2 Kapalı Çevrim Yöntemler R(s) Y(s)Gc(s)=Kp
+
-
Gp(s)
Ziegler-Nichols Yöntemi
t(s)
y(t)
T
0 10 20 30 40 50 600
1
2
3
4Tablo 7.4 Ziegler Nichols’un kapalı çevrim yöntemi
Kontrolör Kp Ti Td
P pcrK5.0 0
PI pcrK45.0
T2.1
1
0
PID pcrK6.0 T5.0 T125.0
s
)T/4s(TK075.0)s(G
2
pcrc

Örnek 7.13 Şekilde, oransal kontrolör kazancı
artırılarak 48Kpcr olduğu anda bir
sistemin birim basamak cevabı verilmiştir. Ziegler-Nichols‘un ikinci yöntemi ile bu sistem için bir PID kontrolör tasarlayınız.
R(s) Y(s)Gc(s)=Kp
+
-
Gp(s)
t(s)
y(t)T
0 1 2 3 40
0.5
1
1.5
t(s)
y(t)
PID kontrollü sistem z1,2=-4
0 1 2 30
0.5
1
1.5
PID kontrollü sistem z1,2=-3