tanggapan sistem - scilab · tanggapan persamaan (3.42) terhadap masukan undak satuan pada gambar...
TRANSCRIPT

1
TANGGAPAN SISTEM
Contoh 1. : Dengan menggunakan Matlab, tentukan tanggapan dan performansi
sistem untuk masukan undak satuan dengan fungsi alih lingkar tertutup pada
persamaan (1) berikut
( ) ( )20 35G s =
0.75s + 0.75 s + 1= (1)
Jawab :
Kode Matlab untuk penyelesaian soal contoh 1. adalah clc clear all close all % Contoh 1 % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup') num = [ 0 5]; den = [ 0.75 0.75]; sys = tf(num,den) % % Pole - Zero - Gain disp('Pole - Zero - Gain') [r,p,k] = residue(num,den) % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = stepinfo(tf(num,den)) % % Tanggapan Sistem Terhadap Masukan Undak Satuan step(num,den) grid on title('Tanggapan Terhadap Masukan Undak Satuan ')
Hasil program Fungsi Alih Lingkar Tertutup Transfer function: 5 ------------- 0.75 s + 0.75 Pole - Zero - Gain r = 6.6667 p =

2
-1 k = [] Performansi Sistem Dalam Domain Waktu y = RiseTime: 2.1973 SettlingTime: 3.9124 SettlingMin: 6.0037 SettlingMax: 6.6640 Overshoot: 0 Undershoot: 0 Peak: 6.6640 PeakTime: 7.8163
Tanggapan persamaan (1) terhadap masukan undak satuan pada Gambar 1. berikut
ini
0 1 2 3 4 5 60
1
2
3
4
5
6
7
Tanggapan Terhadap Masukan Undak Satuan
Time (sec)
Am
plit
ude
Gambar 1. Tanggapan Sistem Terhadap Masukan Undak Satuan
Contoh 2. : Dengan menggunakan Matlab, tentukan tanggapan dan performansi
sistem untuk masukan impulsa satuan dengan fungsi alih lingkar tertutup pada
persamaan (2) berikut
( ) ( )20 35G s =
0.75s + 0.75 s + 1= (2)
Jawab :

3
Kode Matlab untuk penyelesaian contoh 2. berikut clc clear all close all % Contoh 2 % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup') num = [ 0 5]; den = [ 0.75 0.75]; sys = tf(num,den) % % Pole - Zero - Gain disp('Pole - Zero - Gain') [r,p,k] = residue(num,den) % % Tanggapan Sistem Terhadap Masukan Impulsa Satuan t = 0:0.01:10; y = impulse(num,den,t); plot(t,y) grid on title('Tanggapan Terhadap Masukan Impulsa Satuan ') xlabel('detik') ylabel('Keluaran') % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = lsiminfo(y)
Hasil program Transfer function: 5 ------------- 0.75 s + 0.75
Pole - Zero - Gain r = 6.6667 p = -1 k = [] Performansi Sistem Dalam Domain Waktu y = SettlingTime: 391.9802 Min: 3.0267e-004 MinTime: 1001 Max: 6.6667 MaxTime: 1

4
Tanggapan persamaan (2) terhadap masukan undak satuan pada Gambar 2. berikut
ini
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7Tanggapan Terhadap Masukan Impulsa Satuan
detik
Kelu
ara
n
Gambar 2. Tanggapan Sistem Terhadap Masukan Impulsa Satuan
Contoh 3. : Dengan menggunakan Matlab tentukan tanggapan dan performansi
sistem terhadap masukan undak satuan dari sistem lingkar tertutup pada
persamaan (3.) berikut
( )( )
( )( ) ( ) ( )
2
2
15 s + 3s + 7C s=
R s s + 3s + 7 s + 1 s + 3 (3)
Jawab :
Kode Matlab untuk penyelesaian contoh 3. berikut clc clear all close all % Contoh 3. % % Fungsi Alih Lingkar Terbuka disp('Fungsi Alih Lingkar Terbuka') num = 50*[1 5 3]; den = poly([ -1 -2 -4 -5]); G = tf(num,den) % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup') T = feedback(G,1) % % Tanggapan Sistem Terhadap Masukan Undak Satuan

5
step(T) grid on title('Tanggapan Sistem Terhadap Masukan Undak Satuan') % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = stepinfo(T)
Hasil program Fungsi Alih Lingkar Terbuka Transfer function: 50 s^2 + 250 s + 150 --------------------------------- s^4 + 12 s^3 + 49 s^2 + 78 s + 40 Fungsi Alih Lingkar Tertutup Transfer function: 50 s^2 + 250 s + 150 ----------------------------------- s^4 + 12 s^3 + 99 s^2 + 328 s + 190 Performansi Sistem Dalam Domain Waktu y = RiseTime: 0.1896 SettlingTime: 1.4925 SettlingMin: 0.7278 SettlingMax: 0.9860 Overshoot: 24.8992 Undershoot: 0 Peak: 0.9860 PeakTime: 0.4520
Tanggapan persamaan (3) terhadap masukan undak satuan pada Gambar 3. berikut
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tanggapan Sistem Terhadap Masukan Undak Satuan
Time (sec)
Am
plit
ude
Gambar 3. Tanggapan Persamaan (3) Terhadap Masukan Undak Satuan

6
Contoh 4. : Dengan menggunakan Matlab, tentukan tanggapan dan performansi
sistem terhadap masukan eksponensial -2te dari sistem lingkar tertutup pada
persamaan (4) berikut
( )( ) 3 2
C s s + 12=
R s s 5s 8s 12+ + + (4)
Jawab :
Kode Matlab untuk penyelesaian contoh 4. berikut clc clear all close all % Contoh 4. % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup') num = [ 0 0 1 12]; den = [ 1 5 8 12]; sys = tf(num,den) % % Tanggapan Sistem Terhadap Masukan Eksponesial t = 0:0.1:20; r1 = exp(-2*t); y1 = lsim(num,den,r1,t); plot(t,r1,'b',t,y1,'r'); grid on title('Tanggapan Terhadap Masukan Eksponensial ') ylabel('Keluaran') xlabel('detik') text(0.20,0.7,'Masukan Eksponensial') text(1.8,0.38,'Keluaran y(t)') % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = lsiminfo(y1)
Hasil program Fungsi Alih Lingkar Tertutup Transfer function: s + 12 ---------------------- s^3 + 5 s^2 + 8 s + 12 Performansi Sistem Dalam Domain Waktu y = SettlingTime: 74.3341 Min: -0.0981 MinTime: 34 Max: 0.4078

7
MaxTime: 14
Tanggapan persamaan (3.42) terhadap masukan undak satuan pada Gambar 3.14
berikut
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
0.4
0.6
0.8
1
1.2Tanggapan Terhadap Masukan Eksponensial
Kelu
ara
n
detik
Masukan Eksponensial
Keluaran y(t)
Gambar 4. Tanggapan Persamaan (3.42) Terhadap Masukan Eksponensial Satuan
Contoh 5. : Fungsi alih lingkar tertutup pada persamaan (5) berikut
( ) 3 2
3s + 2G s =
2s + 4s + 5s + 1 (5)
Fungsi masukan
( )0 t 0
u t 2 0 t 2
0.5 t 2
<
= ≤ < ≥
(6)
Dengan menggunakan Matlab, tentukan tanggapan dan performansi sistem
terhadap fungsi masukan persamaan (6)
Jawab :
Kode Matlab untuk penyelesaian contoh 5. berikut clc clear all close all % Contoh 5. % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup ') G = tf([3 2],[2 4 5 1])

8
% % Tanggapan Sistem Terhadap Masukan time = [0:0.02:10]'; u = 2.0*(1+0*(time)); for ii=min(find(time>=2.0)):length(u), u(ii) = 0.5;end y = lsim(G,u,time); plot(time,y,time,u);grid xlabel('detik');ylabel('Amplitudo') text(3.5,1.7,'Keluaran') text(4.0,0.58,'Masukan') % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = lsiminfo(y)
Hasil Program Fungsi Alih Lingkar Tertutup Transfer function: 3 s + 2 ----------------------- 2 s^3 + 4 s^2 + 5 s + 1 Performansi Sistem Dalam Domain Waktu y = SettlingTime: 444.7843 Min: 0 MinTime: 1 Max: 2.1486 MaxTime: 119
Tanggapan persamaan (5) terhadap fungsi masukan persamaan (6) pada Gambar 5.
berikut
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
detik
Am
plit
udo
Keluaran
Masukan
Gambar 5. Tanggapan Fungsi Alih Persamaan (5) Terhadap Fungsi Masukan Persamaan
(6)

9
Contoh 6. : Untuk fungsi alih lingkar tertutup pada persamaan (7) berikut
( )2
3 2
2s + 11s + 5G s =
s + 7s + 32s + 60 (7)
Dengan menggunakan Matlab perlihatkan tanggapan dari fungsi alih persamaan
(7) serta tentukan nilai pole, zero dan DC Gain dengan masukan fungsi impulsa
Jawab :
Kode Matlab untuk penyelesaian contoh 6. berikut clc clear all close all % Contoh 3.20 % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup ') numG = [0 2 11 5]; denG = [1 7 32 60]; G = tf(numG,denG) % % Pole - Zero - DC Gain disp('Pole - Zero - DC Gain Sistem Lingkar Tertutup') GG = zpk(G) [zG,pG,kG] = zpkdata(G,'v') [resG,polG,otherG] = residue(numG,denG) % % Tanggapan Keluaran Sistem Terhadap Masukan Impulsa impulse(numG,denG) grid; title('Tanggapan Keluaran Sistem Terhadap Masukan Impulsa') y = impulse(numG,denG); % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = lsiminfo(y)
Hasil program Fungsi Alih Lingkar Tertutup Transfer function: 2 s^2 + 11 s + 5 ----------------------- s^3 + 7 s^2 + 32 s + 60 Pole - Zero - DC Gain Sistem Lingkar Tertutup Zero/pole/gain: 2 (s+5) (s+0.5) --------------------- (s+3) (s^2 + 4s + 20) zG =
10
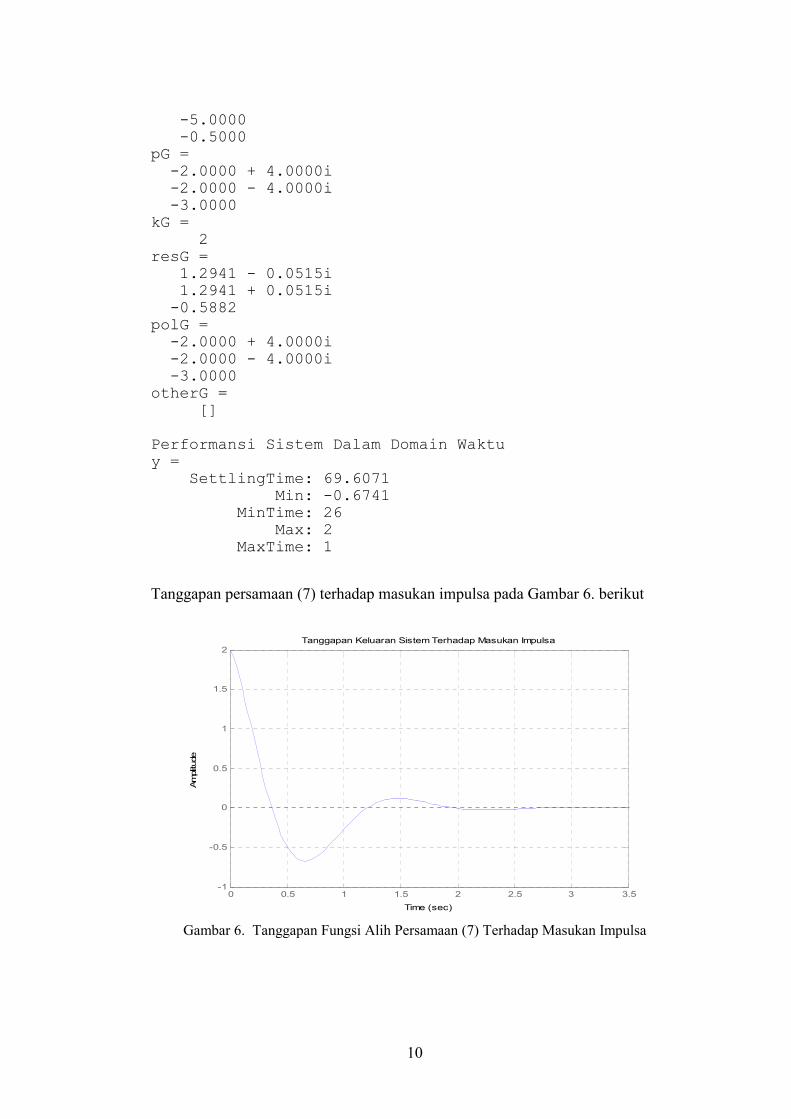
-5.0000 -0.5000 pG = -2.0000 + 4.0000i -2.0000 - 4.0000i -3.0000 kG = 2 resG = 1.2941 - 0.0515i 1.2941 + 0.0515i -0.5882 polG = -2.0000 + 4.0000i -2.0000 - 4.0000i -3.0000 otherG = [] Performansi Sistem Dalam Domain Waktu y = SettlingTime: 69.6071 Min: -0.6741 MinTime: 26 Max: 2 MaxTime: 1
Tanggapan persamaan (7) terhadap masukan impulsa pada Gambar 6. berikut
0 0.5 1 1.5 2 2.5 3 3.5-1
-0.5
0
0.5
1
1.5
2Tanggapan Keluaran Sistem Terhadap Masukan Impulsa
Time (sec)
Am
plit
ude
Gambar 6. Tanggapan Fungsi Alih Persamaan (7) Terhadap Masukan Impulsa

11
Contoh 7. : Untuk fungsi alih lingkar tertutup pada persamaan (8) berikut
( )2
4 3 2
3s + 4s + 5G s =
2s + 7s + 11s + 12s + 4 (8)
Dengan menggunakan Matlab, perlihatkan tanggapan dan performansi persamaan
(8) jika dilakukan penambahan pole di s = 0 terhadap masukan undak satuan
Jawab :
Kode Matlab untuk penyelesaian contoh 7. berikut clc clear all close all % Contoh 7. % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup Sebelum Penambahan Pole') numG = [3 4 5]; denG = [2 7 11 12 4]; G = tf(numG,denG) % % Fungsi Alih Lingkar Tertutup disp('Fungsi Alih Lingkar Tertutup Setelah Penambahan Pole') numstep = numG; denstep = [denG 0]; Gstep = tf(numstep, denstep) % % Tanggapan Keluaran Sistem Jika Dilakukan Penambahan Pole di s = 0 % Masukan Berupa Fungsi Impulsa figure t = 0:0.01:20; subplot(211) [y,x,t] = Impulse(numG,denG,t); plot(t,y); grid on title('Tanggapan Impulsa Sebelum Penambahan Pole') xlabel('detik'); ylabel('Amplitudo'); subplot(212) [y1,x1,t] = Impulse(numstep,denstep,t); plot(t,y1); grid on title('Tanggapan Impulsa Setelah Penambahan Pole') xlabel('detik'); ylabel('Amplitudo'); %

12
% Tanggapan Keluaran Sistem Jika Diberi Masukan Berupa Fungsi Undak Satuan figure subplot(211) [y2,x2,t] = step(numG,denG,t); plot(t,y2); grid on title('Tanggapan Undak Satuan Sebelum Penambahan Pole') xlabel('detik'); ylabel('Amplitudo'); subplot(212) [y3,x3,t] = Impulse(numstep,denstep,t); plot(t,y3); grid on title('Tanggapan Undak Satuan Setelah Penambahan Pole') xlabel('detik'); ylabel('Amplitudo'); % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu Sebelum Penambahan Pole') y = stepinfo(y2) disp('Performansi Sistem Dalam Domain Waktu Setelah Penambahan Pole') y1 = stepinfo(y3)
Hasil program Fungsi Alih Lingkar Tertutup Sebelum Penambahan Pole Transfer function: 3 s^2 + 4 s + 5 --------------------------------- 2 s^4 + 7 s^3 + 11 s^2 + 12 s + 4 Fungsi Alih Lingkar Tertutup Setelah Penambahan Pole Transfer function: 3 s^2 + 4 s + 5 ------------------------------------- 2 s^5 + 7 s^4 + 11 s^3 + 12 s^2 + 4 s Performansi Sistem Dalam Domain Waktu Sebelum Penambahan Pole y = RiseTime: 464.3307 SettlingTime: 787.6210 SettlingMin: 1.1251 SettlingMax: 1.2499 Overshoot: 0 Undershoot: 0 Peak: 1.2499 PeakTime: 2001

13
Performansi Sistem Dalam Domain Waktu Setelah Penambahan Pole y1 = RiseTime: 464.3307 SettlingTime: 787.6210 SettlingMin: 1.1251 SettlingMax: 1.2499 Overshoot: 0 Undershoot: 0 Peak: 1.2499 PeakTime: 2001
Tanggapan persamaan (8) terhadap masukan impulsa pada Gambar 7. dan 8.
berikut
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8Tanggapan Impulsa Sebelum Penambahan Pole
detik
Am
plit
udo
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5Tanggapan Impulsa Setelah Penambahan Pole
detik
Am
plit
udo
Gambar 7. Tanggapan Fungsi Alih Persamaan (8) Terhadap Masukan Impulsa Satuan
Jika Dilakukan Penambahan Pole di s = 0

14
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5Tanggapan Undak Satuan Sebelum Penambahan Pole
detik
Am
plit
udo
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5Tanggapan Undak Satuan Setelah Penambahan Pole
detik
Am
plit
udo
Gambar 8. Tanggapan Fungsi Alih Persamaan (8) Terhadap Masukan Undak Satuan
Pada Gambar 7. dan Gambar 8. terlihat tanggapan keluaran sistem terhadap
masukan impulsa dengan penambahan pole di s = 0 sama dengan tanggapan keluaran
sistem terhadap masukan undak satuan
Contoh 8. : Untuk persamaan keadaan (9) dan (10) adalah
( )( )( )( )
( )( )( )( )
1 1
2 2
3 3
4 4
x t x t0 1 0 0 0
x t x t0 0 1 0 0u
x t x t0 0 0 1 0
x t x t0.0069 0.0789 0.5784 1.3852 2
= +
− − − −
ɺ
ɺ
ɺ
ɺ
(9)
[ ]
( )( )( )( )
1
2
3
4
x t
x ty 1 0 0 0
x t
x t
=
(10)
Dengan menggunakan Matlab, tentukan tanggapan dan performansi persamaan
keadaan (9) dan (10) terhadap fungsi masukan undak satuan dan impulsa satuan
dengan asumsi semua kondisi awal bernilai nol.
Jawab :
Kode Matlab untuk penyelesaian contoh 8. berikut clc clear all close all

15
% Contoh 8 % % Persamaan Keadaan disp('Persamaan Keadaan') A = [ 0 1 0 0; 0 0 1 0; 0 0 0 1; -0.0069 -0.0789 -0.5784 -1.3852] B = [ 0; 0; 0; 2] C = [ 1 0 0 0] D = [0] % % Tanggapan Sistem Terhadap Masukan Undak Satuan figure step(A,B,C,D) grid on title('Tanggapan Sistem Terhadap Masukan Undak Satuan') % % Tanggapan Sistem Terhadap Masukan Impulsa Satuan figure impulse(A,B,C,D) grid on title('Tanggapan Sistem Terhadap Masukan Impulsa Satuan') % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu Terhadap Masukan Undak Satuan ') y = stepinfo(step(A,B,C,D)) disp('Performansi Sistem Dalam Domain Waktu Terhadap Masukan Impulsa Satuan') y1 = lsiminfo(impulse(A,B,C,D))
Hasil program Persamaan Keadaan A = 0 1.0000 0 0 0 0 1.0000 0 0 0 0 1.0000 -0.0069 -0.0789 -0.5784 -1.3852 B = 0 0 0 2 C = 1 0 0 0 D = 0 Performansi Sistem Dalam Domain Waktu Terhadap Masukan Undak Satuan y =

16
RiseTime: 66.7937 SettlingTime: 225.4980 SettlingMin: 262.4366 SettlingMax: 323.9636 Overshoot: 11.5705 Undershoot: 0 Peak: 323.9636 PeakTime: 154 Performansi Sistem Dalam Domain Waktu Terhadap Masukan Impulsa Satuan y1 = SettlingTime: 564.7162 Min: -2.4087 MinTime: 412 Max: 19.3530 MaxTime: 127
Tanggapan persamaan keadaan (3.62) dan (3.63) terhadap masukan undak satuan
diperlihatkan pada Gambar 3.35 berikut
0 10 20 30 40 50 60 70 80 900
50
100
150
200
250
300
350
Tanggapan Sistem Terhadap Masukan Undak Satuan
Time (sec)
Am
plit
ude
Gambar 9. Tanggapan Persamaan Keadaan (9) dan (10) Terhadap Masukan Undak
Satuan
Tanggapan persamaan (9) dan (10) terhadap masukan impulsa satuan pada
Gambar 3.36 berikut

17
0 10 20 30 40 50 60 70 80 90 100-5
0
5
10
15
20
Tanggapan Sistem Terhadap Masukan Impulsa Satuan
Time (sec)
Am
plit
ude
Gambar 10. Tanggapan Persamaan Keadaan (9) dan (10) Terhadap Masukan Impulsa
Satuan
Contoh 9. : Untuk persamaan keadaan (11) dan (12) berikut
( )( )
( )( )
( )( )
1 1 1
2 2 2
x t x t u t1 1 1 1u
x t x t u t7 0 1 0
− − = +
ɺ
ɺ (11)
( )( )
( )( )
( )( )
1 1 1
2 2 2
y t x t u t1 0 0 0u
y t x t u t0 1 0 0
= +
(12)
Dengan menggunakan Matlab, tentukan tanggapan dan performansi keluaran
sistem terhadap masukan undak satuan dan laju satuan
Jawab :
Kode Matlab untuk penyelesaian contoh 9. berikut clc clear all close all % Contoh 9 % % Persamaan Keadaan disp('Persamaan Keadaan') A = [ -1 -1; 7 0] B = [ 1 1; 1 0] C = [ 1 0; 0 1] D = [ 0 0; 0 0] % % Tanggapan Sistem Terhadap Masukan Undak Satuan step(A,B,C,D) grid on
18
title('Tanggapan Sistem Terhadap Masukan Undak Satuan') % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu Terhadap Masukan Undak Satuan ') y = stepinfo(step(A,B,C,D)); % y1 = y(1,1) y2 = y(2,1) y3 = y(3,1) y4 = y(4,1)
Hasil program
Persamaan Keadaan A = -1 -1 7 0 B = 1 1 1 0 C = 1 0 0 1 D = 0 0 0 0
Performansi Sistem Dalam Domain Waktu Terhadap Masukan Undak Satuan y1 = RiseTime: 1.5633 SettlingTime: 76.6938 SettlingMin: -0.3332 SettlingMax: -0.0383 Overshoot: 133.2563 Undershoot: 144.9987 Peak: 0.3332 PeakTime: 16 y2 = RiseTime: 3.9530 SettlingTime: 71.3253 SettlingMin: 0.7824 SettlingMax: 1.8010 Overshoot: 57.9840 Undershoot: 0 Peak: 1.8010 PeakTime: 11 y3 = RiseTime: 0.0045 SettlingTime: 78.1661 SettlingMin: -0.1573
19
SettlingMax: 0.0864 Overshoot: 4.8168e+004 Undershoot: 8.8908e+004 Peak: 0.2897 PeakTime: 6 y4 = RiseTime: 4.3492 SettlingTime: 72.3020 SettlingMin: 0.7016 SettlingMax: 1.5416 Overshoot: 54.5063 Undershoot: 0 Peak: 1.5416 PeakTime: 13
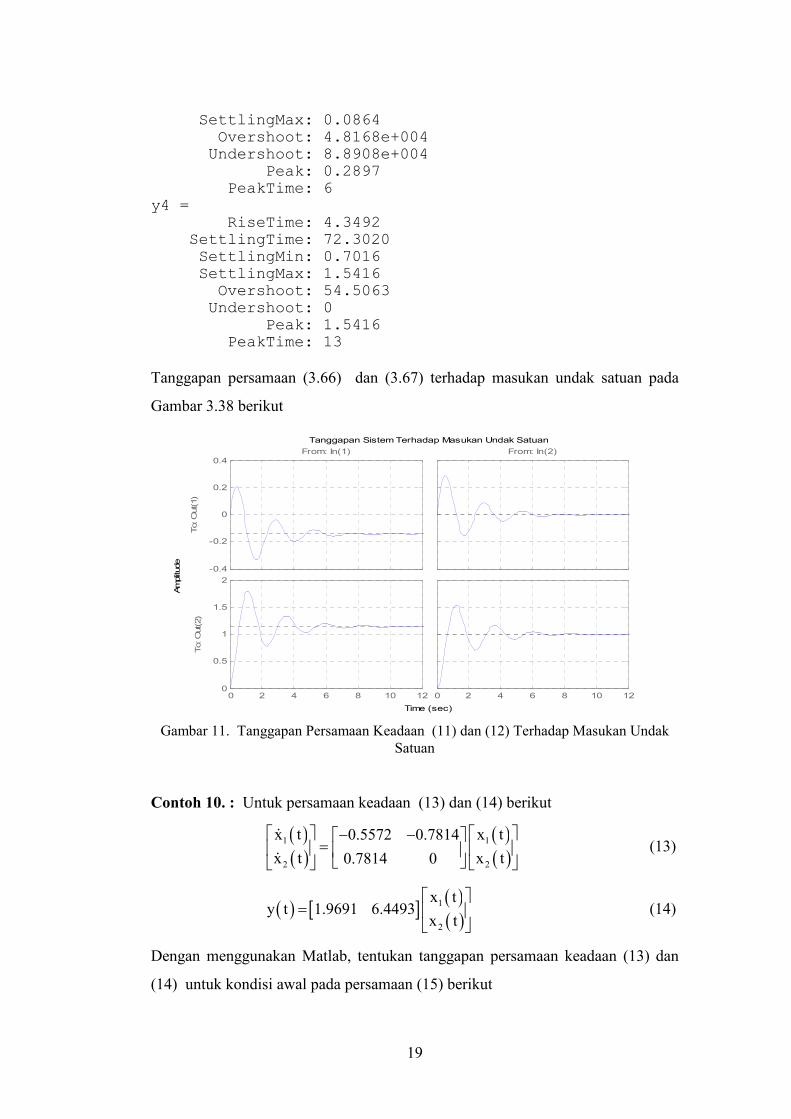
Tanggapan persamaan (3.66) dan (3.67) terhadap masukan undak satuan pada
Gambar 3.38 berikut
-0.4
-0.2
0
0.2
0.4
From: In(1)
To: O
ut(
1)
0 2 4 6 8 10 120
0.5
1
1.5
2
To: O
ut(
2)
From: In(2)
0 2 4 6 8 10 12
Tanggapan Sistem Terhadap Masukan Undak Satuan
Time (sec)
Am
plit
ude
Gambar 11. Tanggapan Persamaan Keadaan (11) dan (12) Terhadap Masukan Undak
Satuan
Contoh 10. : Untuk persamaan keadaan (13) dan (14) berikut
( )( )
( )( )
1 1
2 2
x t x t0.5572 0.7814
x t x t0.7814 0
− − =
ɺ
ɺ (13)
( ) [ ] ( )( )
1
2
x ty t 1.9691 6.4493
x t
=
(14)
Dengan menggunakan Matlab, tentukan tanggapan persamaan keadaan (13) dan
(14) untuk kondisi awal pada persamaan (15) berikut

20
( )1
x 00
=
(15)
Jawab :
Kode Matlab untuk penyelesaian contoh 10. berikut clc clear all close all % Contoh 10 % A = [-0.5572 -0.7814;0.7814 0]; C = [1.9691 6.4493]; x0 = [1 ; 0]; % sys = ss(A,[],C,[]); initial(sys,x0) grid on title('Tanggapan Terhadap Kondisi Awal ')
Tanggapan persamaan (13) dan (14) terhadap masukan undak satuan pada Gambar
12. berikut
0 2 4 6 8 10 12 14 16 18 20-2
-1
0
1
2
3
4
5
Tanggapan Terhadap Kondisi Aw al
Time (sec)
Am
plit
ude
Gambar 12. Tanggapan Persamaan Keadaan (13) dan (14) Terhadap Kondisi Awal

21
Contoh 11. : Untuk persamaan keadaan (16) dan (17) berikut
( )( )
( )( )
( )( )
1 1 1
2 2 2
x t x t u t0.5572 0.7814 1 1
x t x t u t0.7814 0 0 2
− − − = +
ɺ
ɺ (16)
( ) [ ] ( )( )
1
2
x ty t 1.9691 6.4493
x t
=
(17)
Dengan menggunakan Matlab tentukan tanggapan dan performansi sistem jika
diberi masukan undak satuan
Jawab :
Kode Matlab untuk penyelesaian contoh 11. berikut clc clear all close all % Contoh 11 % % Persamaan Keadaan disp('Persamaan Keadaan') A = [-0.5572 -0.7814;0.7814 0]; B = [1 -1;0 2]; C = [1.9691 6.4493]; sys = ss(A,B,C,0) % % Tanggapan Terhadap Masukan Undak Satuan step(sys) grid on title('Tanggapan Terhadap Masukan Undak Satuan') % % Performasi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = stepinfo(sys); y1 = y(1,1) y2 = y(1,2)
Hasil program Persamaan Keadaan
a = x1 x2 x1 -0.5572 -0.7814 x2 0.7814 0 b = u1 u2 x1 1 -1 x2 0 2 c = x1 x2 y1 1.969 6.449

22
d = u1 u2 y1 0 0
Continuous-time model.
Performansi Sistem Dalam Domain Waktu
y1 = RiseTime: 1.6689 SettlingTime: 13.6299 SettlingMin: 7.4651 SettlingMax: 10.8699 Overshoot: 31.7000 Undershoot: 0 Peak: 10.8699 PeakTime: 3.9542 y2 = RiseTime: 0.3090 SettlingTime: 15.4900 SettlingMin: -4.4059 SettlingMax: -0.6536 Overshoot: 189.3647 Undershoot: 528.0328 Peak: 8.0400 PeakTime: 1.5063
Tanggapan persamaan keadaan (16) dan (17) terhadap masukan undak satuan pada
Gambar 13. berikut
0 5 10 15 20
-4
-2
0
2
4
6
8
10
12From: In(1)
0 5 10 15 20
From: In(2)
Tanggapan Terhadap Masukan Undak Satuan
Time (sec)
Am
plit
ude
Gambar 13. Tanggapan Persamaan Keadaan (16) dan (17) Terhadap Masukan Undak
Satuan

23
Contoh 12. : Untuk persamaan keadaan (18) dan (19) berikut
( )( )( )
( )( )( )
( )1 1
2 2
3 3
x t 0.80 3.60 2.10 x t 0
x t 3.00 1.20 4.80 x t 1.10 u t
x t 3.00 4.30 1.10 x t 0.20
− − = − − + − − − −
ɺ
ɺ
ɺ
(18)
( ) [ ]( )( )( )
1
2
3
x t
y t 1.20 0.00 0.60 x t
x t
=
(19)
Dengan menggunakan Matlab tentukan tanggapan dan performansi sistem jika
diberi masukan undak satuan
Jawab :
Kode Matlab untuk penyelesaian contoh 12. berikut
clc clear all close all % % Contoh 12 A = [-0.8 3.6 -2.1;-3 -1.2 4.8;3 -4.3 -1.1]; B = [0; -1.1; -0.2]; C = [1.2 0 0.6]; D = 0; % % Persamaan Keadaan Sistem disp('Persamaan Keadaan Sistem') sys = ss(A,B,C,D) step(sys) grid on title('Tanggapan Terhadap Masukan Undak Satuan ') % % Performansi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = stepinfo(sys)
Hasil program Persamaan Keadaan Sistem a = x1 x2 x3 x1 -0.8 3.6 -2.1 x2 -3 -1.2 4.8 x3 3 -4.3 -1.1 b = u1 x1 0 x2 -1.1

24
x3 -0.2 c = x1 x2 x3 y1 1.2 0 0.6 d = u1 y1 0 Continuous-time model. Performansi Sistem Dalam Domain Waktu y = RiseTime: 7.1241 SettlingTime: 12.7823 SettlingMin: -2.1986 SettlingMax: -1.9807 Overshoot: 0 Undershoot: 0 Peak: 2.1986 PeakTime: 26.758
Tanggapan persamaan keadaan (18) dan (19) terhadap masukan undak satuan pada
Gambar 14. berikut
0 5 10 15 20 25-2.5
-2
-1.5
-1
-0.5
0
Tanggapan Terhadap Masukan Undak Satuan
Time (sec)
Am
plit
ude
Gambar 14. Tanggapan Persamaan Keadaan (3.88) dan (3.89) Terhadap Masukan Undak
Satuan

25
Contoh 13. : Untuk sistem dengan persamaan keadaan (20) dan (21) berikut
( )( )
( )( )
( )( )
1 1 1
2 2 2
x t x t u t1.0000 1.0000 1 1
x t x t u t7.0000 0 1 0
− − = +
ɺ
ɺ (20)
( )( )
( )( )
( )( )
1 1 1
2 2 2
y t x t u t1.0000 0.0000 0.0000 0.0000
y t x t u t0.0000 1.0000 0.0000 0.0000
= +
(21)
Jawab :
Kode Matlab untuk penyelesaian contoh 13. berikut clc clear all close all % Contoh 13. % % Persamaan Keadaan disp('Persamaan Keadaan Sistem') A = [ -1.0000 -1.0000; 7.0000 0.0000]; B = [ 1.0000 1.0000; 1.0000 0.0000]; C = [ 1.0000 0.0000; 0.0000 1.0000]; D = [ 0.0000 0.0000; 0.0000 0.0000]; sys = ss(A,B,C,D); % % Tanggapan Terhadap Masukan Undak Satuan step(sys) grid on title('Tanggapan Terhadap Masukan Undak Satuan') % % Performasi Sistem Dalam Domain Waktu disp('Performansi Sistem Dalam Domain Waktu') y = stepinfo(sys); disp('Untuk Fungsi Alih Keluaran 1 Terhadap Masukan 1') y1 = y(1,1) disp('Untuk Fungsi Alih Keluaran 1 Terhadap Masukan 2') y2 = y(1,2) disp('Untuk Fungsi Alih Keluaran 2 Terhadap Masukan 1') y3 = y(2,1) disp('Untuk Fungsi Alih Keluaran 2 Terhadap Masukan 2') y4 = y(2,2)
Hasil program Persamaan Keadaan Sistem a = x1 x2 x1 -1 -1 x2 7 0 b =

26
u1 u2 x1 1 1 x2 1 0 c = x1 x2 y1 1 0 y2 0 1 d = u1 u2 y1 0 0 y2 0 0 Continuous-time model. Performansi Sistem Dalam Domain Waktu Untuk Fungsi Alih Keluaran 1 Terhadap Masukan 1 y1 = RiseTime: 0.1640 SettlingTime: 7.9409 SettlingMin: -0.3332 SettlingMax: -0.0383 Overshoot: 133.2707 Undershoot: 145.0077 Peak: 0.3332 PeakTime: 1.5738 Untuk Fungsi Alih Keluaran 1 Terhadap Masukan 2 y2 = RiseTime: 0 SettlingTime: 8.0709 SettlingMin: -0.1573 SettlingMax: 0.2897 Overshoot: Inf Undershoot: Inf Peak: 0.2897 PeakTime: 0.5246 Untuk Fungsi Alih Keluaran 2 Terhadap Masukan 1 y3 = RiseTime: 0.4156 SettlingTime: 7.4361 SettlingMin: 0.7824 SettlingMax: 1.8010 Overshoot: 57.5883 Undershoot: 0 Peak: 1.8010 PeakTime: 1.0492 Untuk Fungsi Alih Keluaran 2 Terhadap Masukan 2 y4 = RiseTime: 0.4571

27
SettlingTime: 7.5386 SettlingMin: 0.7016 SettlingMax: 1.5416 Overshoot: 54.1634 Undershoot: 0 Peak: 1.5416 PeakTime: 1.2590
Tanggapan persamaan keadaan (20) dan (21) terhadap masukan undak satuan pada
Gambar 15. berikut
-0.4
-0.2
0
0.2
0.4
From: In(1)
To: O
ut(
1)
0 2 4 6 8 10 120
0.5
1
1.5
2
To: O
ut(
2)
From: In(2)
0 2 4 6 8 10 12
Tanggapan Terhadap Masukan Undak Satuan
Time (sec)
Am
plit
ude
Gambar 15. Tanggapan Persamaan Keadaan (20) dan (21) Terhadap Masukan Undak
Satuan