desenvolvimento de uma plataforma de …ct.utfpr.edu.br/deptos/ceaut/monografias/desenvolv de...
TRANSCRIPT
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
PROGRAMA DE PÓS-GRADUAÇÃO
DEPARTAMENTO ACADÊMICO DE ELETRÔNICA
ESPECIALIZAÇÃO EM AUTOMAÇÃO INDUSTRIAL
LUÍS GABRIEL RODRIGUES MARTINI
DESENVOLVIMENTO DE UMA PLATAFORMA DE TESTES
PARA O CONTROLE UNIFICADO DE TENSÃO EM
SUBESTAÇÕES DE DISTRIBUIÇÃO DA COPEL
MONOGRAFIA - ESPECIALIZAÇÃO
CURITIBA 2010
1
LUÍS GABRIEL RODRIGUES MARTINI
DESENVOLVIMENTO DE UMA PLATAFORMA DE TESTES
PARA O CONTROLE UNIFICADO DE TENSÃO EM
SUBESTAÇÕES DE DISTRIBUIÇÃO DA COPEL
Monografia de conclusão do curso de Especialização em Automação Industrial do Departamento Acadêmico de Eletrônica da Universidade Tecnológica Federal do Paraná apresentada como requisito parcial para obtenção do grau de Especialista em Automação Industrial. Prof. Dr. Joaquim Eloir Rocha
CURITIBA 2010

2
Ministério da Educação Universidade Tecnológica Federal do Paraná
Diretoria do Campus Curitiba Gerência de Pesquisa e Pós-Graduação
Departamento Acadêmico de Eletrônica _______________________________________________________________
TERMO DE APROVAÇÃO
Desenvolvimento de uma Plataforma de Testes para o Controle Unificado de
Tensão em Subestações de Distribuição da Copel
DESENVOLVIMENTO DE UMA PLATAFORMA DE TESTES PARA O CONTROLE
UNIFICADO DE TENSÃO EM SUBESTAÇÕES DE DISTRIBUIÇÃO DA COPEL
Área de conhecimento : Automação Eletrônica de Processos Elétricos e Industriais
por
Luís Gabriel Rodrigues Martini
A presente monografia, requisito parcial para obtenção do título de ESPECIALISTA EM AUTOMAÇÃO INDUSTRIAL, foi avaliada pela banca examinadora, constituída pelos docentes abaixo discriminados, que considerou o trabalho Aprovado .
____________________________________ _______________________________________
Prof. Dr. Carlos Raimundo Erig Lima Prof. Dr. Winderson Eugenio dos Santos
______________________________________
Prof. Dr. Joaquim Eloir Rocha
Curitiba, 14 de Dezembro de 2010.
Visto da coordenação
_____________________________________ Prof. Dr. Jean Marcelo Simão A Folha de Aprovação assinada encontra-se na Coordenação do Curso.

3
AGRADECIMENTOS
Agradeço principalmente à Companhia Paranaense de Energia (Copel) por todo apoio
e suporte prestado no fornecimento dos dados para o desenvolvimento do trabalho.
Aos amigos Paulo Estevan de Carvalho e Rodrigo Antonio Peniche por toda
consultoria técnica gentilmente cedida.
Aos seguintes funcionários da Copel: Jeferson Turatti Pramio, Julio Shigeaki Omori,
Mauricio Biczkowski, Mauricio Varassim Hernandes, Roger Pinto Siqueira, Romão
Kowaltschuk, Vanderlei Aparecido da Silva e Wilson Kawano.
Ao Professor Orientador Joaquim Eloir Rocha pelo apoio e acompanhamento.
Aos meus familiares: Luís Felipe Martini, Luís Roberto Corrêa Martini e Márcia
Aparecida Rodrigues Martini.
4
RESUMO
MARTINI, Luís Gabriel Rodrigues. Desenvolvimento de uma plataforma de testes para o controle unificado de tensão em subestações de distribuição da Copel. 2010. 90 f. Monografia (Especialização em Automação Industrial) – Departamento Acadêmico de Eletrônica, Universidade Tecnológica Federal do Paraná, Curitiba, 2010. O controle unificado de tensão é um controle desenvolvido pela Copel, que atua na tensão e no fator de potência das barras de carga, mantendo-os dentro dos limites estabelecidos pelos órgãos reguladores. Os sensores utilizados pelo controle são os TCs e TPs dos gerais dos transformadores. Os atuadores são os comutadores de tape dos transformadores de carga e os bancos de capacitores em derivação das barras de carga. O presente trabalho tem por objetivo desenvolver uma plataforma de testes em laboratório para este controle e verificar o seu desempenho. A principal vantagem associada ao tema refere-se ao aumento da capacidade de simulação em laboratório e a possibilidade de simulação de cenários operativos que em campo dificilmente seriam possíveis de se reproduzir. A plataforma proposta foi desenvolvida no software Matlab/Simulink® e a subestação Andirá 138 kV, localizada no nordeste do estado do Paraná, foi escolhida para a realização dos testes. Na plataforma também foram realizados ensaios para a sintonia de alguns parâmetros que serão utilizados pela função em campo. Palavras-Chaves: Automação de subestações. Controle de tensão. Controle de reativo. Transformador. Banco de capacitor.

5
ABSTRACT
MARTINI, Luís Gabriel Rodrigues. Desenvolvimento de uma plataforma de testes para o controle unificado de tensão em subestações de distribuição da Copel. 2010. 90 f. Monografia (Especialização em Automação Industrial) – Departamento Acadêmico de Eletrônica, Universidade Tecnológica Federal do Paraná, Curitiba, 2010. The unified control of voltage was developed by Copel, which operates in voltage and power factor of load bars, keeping them within the limits set by regulatory agencies. The control’s sensors are the CTs and PTs of general sectors of the power transformers. The actuators are transformers’ on load tape changer and shunt capacitor banks of the load bars. This paper aims at developing a test platform in the laboratory for this control and verify its performance. The main advantage associated with the theme refers to increasing the capacity of laboratory simulation and the ability to simulate operational scenarios that in field would hardly be possible to reproduce. The proposed platform was developed in Matlab/Simulink® and Andirá 138 kV substation, located in the northeastern state of Paraná, was chosen for the tests. On the platform were also carried out tests to tune some parameters to be used by the function in the real substation. Key Words: Substation automation. Voltage control. Reactive control. Transformer. Capacitor bank.

6
LISTA DE FIGURAS
Figura 1 - Ponto de medição do fator de potência na fronteira com a rede básica...................11 Figura 2 - Transformador de núcleo a ar, indutivamente acoplado..........................................17 Figura 3 - Transformador de núcleo de ferro, caso ideal..........................................................19 Figura 4 - Impedância equivalente de entrada e saída..............................................................20 Figura 5 - Fluxos dispersos em um transformador real carregado ...........................................22 Figura 6 - Resistências e reatâncias primárias e secundárias, ocasionando quedas de tensão num transformador real ............................................................................................................22 Figura 7 - Circuito equivalente de um transformador real de potência ....................................23 Figura 8 - Circuito equivalente aproximado com resistências e reatâncias refletidas..............23 Figura 9 - Relações primárias a vazio ......................................................................................25 Figura 10 - Configuração monofásica do ensaio a vazio .........................................................26 Figura 11 - Diagrama de blocos de um sistema de controle.....................................................29 Figura 12 - Diagrama de blocos de um controlador integral....................................................30 Figura 13 - Curvas e(t) e u(t) do controle integral....................................................................30 Figura 14 - Exemplo de integração em uma barra de 13,8 kV.................................................31 Figura 15 - Lógica de atuação do CAT ....................................................................................32 Figura 16 - Sobreposição entre os patamares de carga.............................................................34 Figura 17 - Modelo monofásico da SE Andirá 138 kV para análise do CUT..........................37 Figura 18 - Transformador de três enrolamentos acoplados no mesmo núcleo .......................38 Figura 19 - Parâmetros de entrada do bloco Saturable Transformer para o TF-1 ...................39 Figura 20 - Curva de saturação sem histerese do bloco Saturable Transformer......................41 Figura 21 - Módulo do ensaio em vazio...................................................................................45 Figura 22 - Arquivos do CUT e fluxo das variáveis ................................................................47 Figura 23 - Parâmetros do CUT ...............................................................................................48 Figura 24 - Workspace com todos os vetores do modelo simplificado do CUT......................49 Figura 25 - Funções do arquivo CUT.m...................................................................................50 Figura 26 - Parâmetros do TF-1 utilizados no modelo simplificado do CUT..........................53 Figura 27 - Componentes de medição e redirecionamento do modelo simplificado do CUT .54 Figura 28 - Gráfico comparativo das curvas de saturação simulada e medida.........................62 Figura 29 - Workspace com todos os vetores para validação do modelo da SE Andirá 138 kV..................................................................................................................................................64 Figura 30 - Tensões secundárias simuladas e medidas.............................................................65 Figura 31 - Tensões terciárias simuladas e medidas ................................................................65

7
LISTA DE TABELAS
Tabela 1 - Resultados do ensaio em vazio realizado no TF-1 ..................................................41 Tabela 2 - Vofn e Io referido ao primário...................................................................................42 Tabela 3 - Pontos da curva de saturação sem histerese do TF-1 ..............................................43 Tabela 4 - Parâmetros para todos os tapes do TF-1..................................................................52 Tabela 5 - Limites de tensão para a barra secundária...............................................................56 Tabela 6 - Limites de tensão para a barra terciária...................................................................56 Tabela 7 - Combinações de bancos da SE Andirá 138 kV.......................................................60 Tabela 8 - Comparativo entre o ensaio em vazio simulado e o real .........................................61 Tabela 9 - Análise do erro entre as tensões simuladas e as de campo......................................66 Tabela 10 - Número de violações de tensão com e sem o modelo simplificado do CUT........67 Tabela 11 - Número de violações de fator de potência com e sem o modelo simplificado do CUT ..........................................................................................................................................67 Tabela 12 - Número de manobras com e sem o modelo simplificado do CUT .......................68
8
LISTA DE SIGLAS
ABNT Associação Brasileira de Normas TécnicasADA Subestação AndiráAneel Agência Nacional de Energia ElétricaCAR Controle Automático de ReativoCAT Controle Automático de TensãoCopel Companhia Paranaense de EnergiaCUT Controle Unificado de TensãoFem Força EletromotrizFP Fator de PotênciaLT Linha de TransmissãoONS Operador Nacional do Sistema ElétricoProdist Procedimentos de DistribuiçãoRMS Root Mean SquareSase Sistema de Automação de SubestaçõesSE SubestaçãoSI Sistema Internacional de UnidadesTC Transformador de CorrenteTF Transformador de PotênciaTP Transformador de PotêncialUAC Uniadade de Aquisição e ControleUCC Unidade de Controle e ComandoVINF-BC Limite de Tensão Inferior da Barra ControladaVINF-F Limite de Tensão Inferior da FaixaVSUP-BC Limite de Tensão Superior da Barra ControladaVSUP-F Limite de Tensão Superior da Faixa
9
SUMÁRIO
AGRADECIMENTOS.............................................................................................................3
RESUMO...................................................................................................................................4
ABSTRACT ..............................................................................................................................5
LISTA DE FIGURAS...............................................................................................................6
LISTA DE TABELAS..............................................................................................................7
LISTA DE SIGLAS..................................................................................................................8
SUMÁRIO.................................................................................................................................9
1 INTRODUÇÃO ..............................................................................................................11
1.1 TEMA..............................................................................................................................11 1.1.1 Delimitação do Tema ......................................................................................................12 1.2 PROBLEMA E PREMISSAS.........................................................................................12 1.3 OBJETIVOS ...................................................................................................................13 1.3.1 Objetivo Geral.................................................................................................................13 1.3.2 Objetivos Específicos......................................................................................................13 1.4 JUSTIFICATIVA............................................................................................................14 1.5 PROCEDIMENTOS METODOLÓGICOS....................................................................14 1.6 EMBASAMENTO TEÓRICO .......................................................................................15 1.7 ESTRUTURA DO TRABALHO....................................................................................15
2 FUNDAMENTOS TEÓRICOS.....................................................................................17
2.1 O TRANSFORMADOR .................................................................................................17 2.1.1 Definições Fundamentais ................................................................................................17 2.1.2 O Transformador Ideal....................................................................................................19 2.1.3 Impedância Refletida e Transformação de Impedâncias ................................................20 2.1.4 O Transformador Real.....................................................................................................21 2.1.5 Circuitos Equivalentes para um Transformador Real de Potência..................................23 2.1.6 Perdas no Ferro ...............................................................................................................24 2.1.7 Ensaio em Vazio .............................................................................................................25 2.2 O CONTROLE UNIFICADO DE TENSÃO (CUT)......................................................27 2.2.1 Definições........................................................................................................................27 2.2.2 O Controle Automático de Tensão (CAT) ......................................................................29 2.2.3 Determinação do Patamar de Carga................................................................................33 2.2.4 O Controle Automático de Reativo (CAR).....................................................................34
3 PLATAFORMA DE TESTES.......................................................................................36
3.1 MODELO DA SE ANDIRÁ 138 kV..............................................................................36 3.1.1 Modelagem do Transformador de Carga ( TF-1)............................................................38 3.1.2 Módulo do Ensaio em Vazio...........................................................................................44 3.2 MODELO SIMPLIFICADO DO CONTROLE UNIFICADO DE TENSÃO ...............46 3.2.1 Parametrização do Modelo Simplificado do CUT..........................................................47 3.2.2 Arquivo Dados_ADA_03-2010_Rev02.mat...................................................................49
10
3.2.3 Arquivo CUT.m ..............................................................................................................50
4 ANÁLISE DOS RESULTADOS...................................................................................61
4.1 RESULTADOS DO ENSAIO EM VAZIO....................................................................61 4.2 RESULTADO DA VALIDAÇÃO DO MODELO DA SE ANDIRÁ 138 kV...............63 4.2.1 Arquivo Dados_ADA_03-2010_Rev01.mat...................................................................63 4.2.2 Análise e Resultados .......................................................................................................64 4.3 RESULTADO DA ANÁLISE DO MODELO SIMPLIFICADO DO CUT ..................66 4.3.1 Violações de Tensão .......................................................................................................66 4.3.2 Violações de Fator de Potência .......................................................................................67 4.3.3 Número de Manobras......................................................................................................67
5 CONCLUSÕES E PROPOSTAS FUTURAS..............................................................69
5.1 CONCLUSÕES ..............................................................................................................69 5.2 PROPOSTAS FUTURAS...............................................................................................70
REFERÊNCIAS .....................................................................................................................71

11
1 INTRODUÇÃO
1.1 TEMA
Segundo a Agência Nacional de Energia Elétrica (Aneel), a manutenção dos níveis de
tensão dentro dos limites estabelecidos nos Procedimentos de Distribuição (Prodist) é
imprescindível para um adequado serviço de fornecimento de energia elétrica (AGÊNCIA...,
2010).
De acordo com os procedimentos de rede do Operador Nacional do Sistema Elétrico
(ONS), nos pontos onde há transformadores interligadores de 230/69 kV ou 230/138 kV,
conhecidos por pontos de conexão á rede básica, o fator de potência do fluxo passante deve
manter-se na faixa de 0,95 indutivo a 1,0 (OPERADOR..., 2009, p. 27). A figura 1 abaixo
ilustra a medição do fator de potência nos pontos de conexão á rede básica.
Figura 1 - Ponto de medição do fator de potência na fronteira
com a rede básica . Fonte: Companhia Paranaense de Energia, 2009, p. 3. .
Assim, cabe a Companhia Paranaense de Energia (Copel) como concessionária de
serviço público de distribuição de energia elétrica, a manutenção dos níveis de tensão das suas
barras de carga dentro dos limites determinados pela Aneel (AGÊNCIA..., 2010).
Também cabe a Copel, que o fluxo passante pelos transformadores interligadores
tenha fator de potência dentro dos limites de operação junto à rede básica, garantindo assim o
seu adequado nível de desempenho (OPERADOR..., 2009, p. 27). Segundo a Copel,
conforme o Estudo 38 (2009, p. 4) uma das alternativas possíveis para o aumento do fator de

12
potência na fronteira com a rede básica é a utilização adequada dos bancos de capacitores
localizados em barras de carga de subestações (SEs) de distribuição.
Para atender as exigências dos órgãos reguladores relativas à tensão e fator de
potência, a empresa pode fazer uso de equipamentos que controlam estas grandezas em nível
de distribuição, como os comutadores de tape sob carga de transformadores e os bancos de
capacitores em derivação ou shunt. Tais equipamentos são normalmente encontrados nas
subestações de energia elétrica (MOROZINI JÚNIOR, 2005).
Segundo a Copel (2009, p. 37), o controle de tensão nas barras de carga é realizado
por software instalado no computador local da subestação. A empresa ainda não possui um
controle automático de reativo em operação. O que é feito atualmente é o chaveamento
manual de bancos de capacitores com a finalidade de elevar eventuais quedas de tensão nas
barras de carga. Assim, fez-se necessário o desenvolvimento de um controle de reativo aliado
ao controle de tensão, uma vez que ambos estão relacionados. Tal controle foi desenvolvido
pelas equipes de automação, operação do sistema e de tecnologia de informação da Copel e
foi chamado de controle unificado de tensão (CUT).
1.1.1 Delimitação do Tema
O presente trabalho refere-se ao desenvolvimento de uma plataforma de testes em
laboratório para auxiliar na homologação do aplicativo CUT, verificando o seu
funcionamento em condições consideradas críticas para o correto funcionamento da função.
1.2 PROBLEMA E PREMISSAS
A função elétrica de controle unificado de tensão pertencente ao sistema de automação
de subestações (Sase) atualmente encontra-se em fase de homologação e testes pela equipe de
automação da Copel. Tal controle utiliza como atuadores: o comutador de tape dos
transformadores de carga e os bancos de capacitores em derivação das barras de carga.
Manobras inadequadas destes atuadores podem gerar surtos, danificando os equipamentos da
subestação ou dos consumidores.
13
Subestações geralmente são instalações afastadas dos postos de trabalho das equipes
técnicas, fato que reduz o tempo disponível para testes em campo e dificulta o acesso em caso
de alguma falha ou eventualidade.
Assim, percebeu-se que antes da implantação da função em campo é necessário o seu
teste em laboratório.
Para tanto, exige-se uma plataforma que represente fielmente a parte da subestação
relevante para a função. Tal plataforma deve permitir a imposição de testes com os cenários
considerados críticos para o correto funcionamento da função e de todo o sistema elétrico
associado à subestação.
1.3 OBJETIVOS
1.3.1 Objetivo Geral
Desenvolver uma plataforma de testes em laboratório para o controle unificado de
tensão de subestações de distribuição da Copel e verificar o seu desempenho mediante
determinados cenários de simulação.
1.3.2 Objetivos Específicos
• Escolher a subestação adequada para a realização dos testes;
• Coletar os parâmetros exigidos pelo software para a correta modelagem da subestação
teste;
• Validar os parâmetros coletados mediante a realização de ensaios no transformador da
subestação teste;
• Com a subestação modelada, submetê-la a carregamentos históricos e comparar os
dados de valores de tensão obtidos na simulação com os dados medidos em campo;
• Programar a lógica do controle unificado de tensão e aplicá-la na subestação
modelada, comparando os valores obtidos de tensão e fator de potência com os
medidos em campo e verificando o desempenho da função.

14
1.4 JUSTIFICATIVA
A principal vantagem do desenvolvimento da plataforma refere-se à capacidade de
simulação que se ganhará em laboratório. Com ela será possível simular cenários operativos
que em campo dificilmente seriam possíveis de se reproduzir.
A função elétrica de controle unificado de tensão é a primeira do sistema de
automação de subestações da Copel a realizar uma espécie de controle preditivo sobre suas
ações. Antes de enviar um comando para comutar um tape ou para chavear um banco de
capacitores, o controle calcula o impacto do comando sobre a tensão das barras de carga e
toma a decisão mais adequada.
Mediante a complexidade envolvida na tomada de decisões e pela inexistência de uma
ferramenta capaz de emular as características de uma subestação, o trabalho proposto tornar-
se-á de grande valia.
Outro aspecto que justifica a concepção da plataforma refere-se à sua capacidade de
ajustar certos parâmetros, como por exemplo: as resistências e reatâncias dos enrolamentos
dos transformadores, capacitâncias de bancos de capacitores, entre outros. Tais parâmetros
poderão ser sintonizados pela plataforma antes de serem levados a campo.
A plataforma também poderá servir com uma ferramenta de pós-operação, no qual
eventos ocorridos em campo poderão ser modelados e analisados com maior detalhe em
laboratório.
1.5 PROCEDIMENTOS METODOLÓGICOS
Para se atingir os objetivos propostos no item 1.3.1, uma pesquisa de natureza aplicada
e experimental será realizada.
Serão realizados dois experimentos utilizando dados medidos pelo sistema de
automação da Copel.
O primeiro experimento será realizado para validação do modelo de subestação
utilizado pela plataforma de testes. Tal experimento consiste em inserir dados medidos de
carga no modelo de subestação e comparar os valores obtidos de tensão nas barras com os
medidos em campo, fazendo uma análise quantitativa do erro entre eles.
15
No segundo experimento, os mesmos dados históricos serão inseridos na plataforma
com o controle unificado de tensão implementado. Será realizada uma comparação
qualitativa, no que diz respeito à tensão e ao fator de potência, entre os resultados obtidos
nesta simulação e os valores medidos em campo.
Como pesquisa experimental, este trabalho será do tipo exploratório com a finalidade
de propor uma nova técnica para análise do controle unificado de tensão.
1.6 EMBASAMENTO TEÓRICO
No presente trabalho, o embasamento teórico utilizado é fundamentado nos conceitos
de transformadores descritos por Kosow (1982) e por Simone (1998). Também são abordados
os fundamentos de controle descritos por Ogata (1998) e as definições e lógicas elaboradas
pela Copel (2009) relacionadas ao controle unificado de tensão.
1.7 ESTRUTURA DO TRABALHO
Este trabalho compõe-se de 6 (seis) partes, com 5 (cinco) capítulos, sendo:
• Parte 1 – Capítulo introdutório;
• Parte 2 – Fundamentos teóricos: Capítulo 2;
• Parte 3 – Plataforma de testes: Capítulo 3;
• Parte 4 – Análise dos resultados: Capítulo 4;
• Parte 5 – Conclusões: Capítulo 5;
• Parte 6 – Referências.
O Capítulo introdutório estabelece o tema relacionado ao desenvolvimento da
plataforma de testes para o controle unificado de tensão. Define o problema existente e o
objetivo proposto para resolvê-lo, além de mencionar a justificativa para a execução do
trabalho e a metodologia de pesquisa utilizada.
O Capítulo 2 contém os fundamentos teóricos que serviram de base para o
desenvolvimento do trabalho. Nele são abordados os conceitos gerais de transformadores, a
descrição do ensaio em vazio e as definições relativas ao controle integral e ao controle
unificado de tensão.
16
O Capítulo 3 descreve a arquitetura da plataforma de testes desenvolvida, os
componentes utilizados na sua modelagem e a sua lógica de funcionamento.
O Capítulo 4 mostra os ensaios realizados no software para a validação dos parâmetros
de simulação e os testes realizados em cada fase de concepção da plataforma.
O Capítulo 5 traz as conclusões finais seguido das referências bibliográficas utilizadas
para a fundamentação teórica do trabalho.

17
2 FUNDAMENTOS TEÓRICOS
2.1 O TRANSFORMADOR
Segundo Simone, o transformador é um equipamento extremamente importante em
circuitos elétricos, sendo utilizado em sistemas de geração, transmissão e distribuição de
energia elétrica e trabalhando nas mais diversas tensões, correntes e freqüências. Sua principal
aplicação em um sistema elétrico de potência é a mudança dos níveis de tensão e de corrente
sem alterar a freqüência da onda fundamental. O equipamento possui construção
relativamente simples, não possuindo peças móveis ou desgastáveis. Apresenta longo tempo
de vida útil quando comparado ao seu custo inicial (SIMONE, 1998).
2.1.1 Definições Fundamentais
Segundo Kosow “o transformador opera segundo o princípio da indução mútua entre
duas (ou mais) bobinas ou circuitos indutivamente acoplados” (KOSOW, 1982, p. 511). A
figura 2 abaixo ilustra um transformador teórico de núcleo a ar, no qual dois circuitos são
acoplados por indução magnética.
Figura 2 - Transformador de núcleo a ar, indutivamente acoplado . Fonte: Kosow, 1982, p. 512. .
18
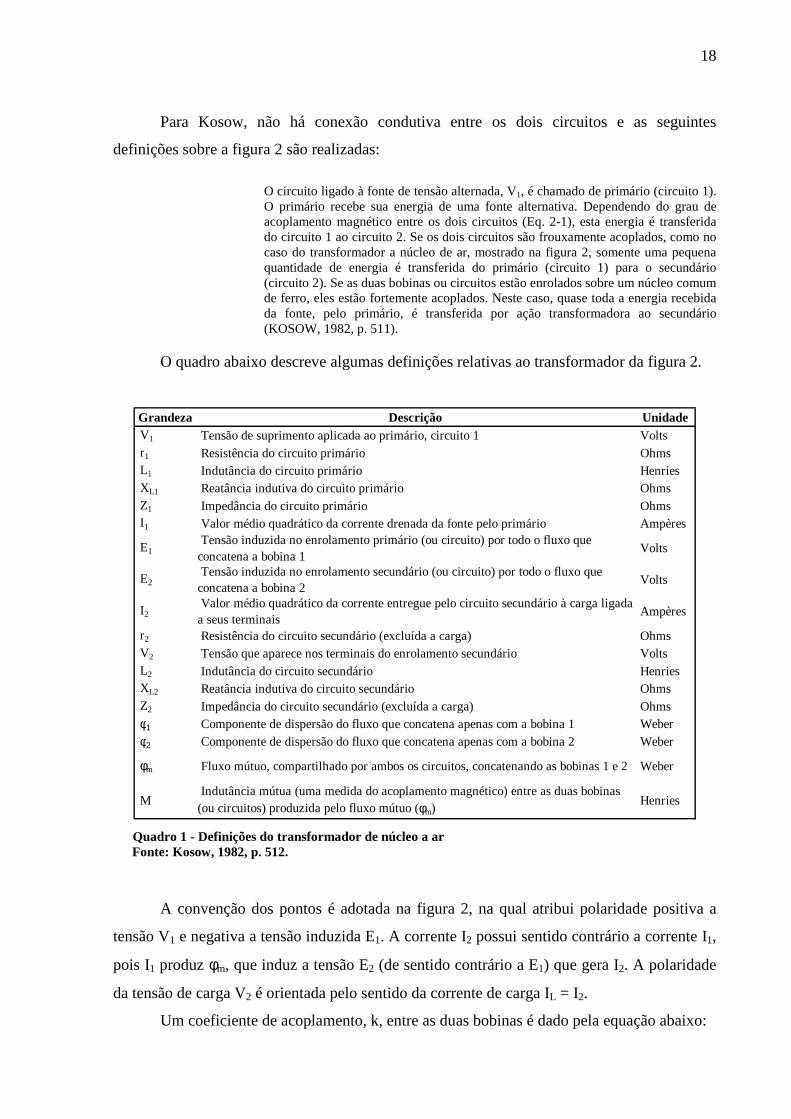
Para Kosow, não há conexão condutiva entre os dois circuitos e as seguintes
definições sobre a figura 2 são realizadas:
O circuito ligado à fonte de tensão alternada, V1, é chamado de primário (circuito 1). O primário recebe sua energia de uma fonte alternativa. Dependendo do grau de acoplamento magnético entre os dois circuitos (Eq. 2-1), esta energia é transferida do circuito 1 ao circuito 2. Se os dois circuitos são frouxamente acoplados, como no caso do transformador a núcleo de ar, mostrado na figura 2, somente uma pequena quantidade de energia é transferida do primário (circuito 1) para o secundário (circuito 2). Se as duas bobinas ou circuitos estão enrolados sobre um núcleo comum de ferro, eles estão fortemente acoplados. Neste caso, quase toda a energia recebida da fonte, pelo primário, é transferida por ação transformadora ao secundário (KOSOW, 1982, p. 511).
O quadro abaixo descreve algumas definições relativas ao transformador da figura 2.
Grandeza Descrição Unidade V1 Tensão de suprimento aplicada ao primário, circuito 1 Volts r1 Resistência do circuito primário Ohms L1 Indutância do circuito primário Henries XL1 Reatância indutiva do circuito primário Ohms Z1 Impedância do circuito primário Ohms I1 Valor médio quadrático da corrente drenada da fonte pelo primário Ampères
E1 Tensão induzida no enrolamento primário (ou circuito) por todo o fluxo que concatena a bobina 1
Volts
E2 Tensão induzida no enrolamento secundário (ou circuito) por todo o fluxo que concatena a bobina 2
Volts
I2 Valor médio quadrático da corrente entregue pelo circuito secundário à carga ligada a seus terminais
Ampères
r2 Resistência do circuito secundário (excluída a carga) Ohms V2 Tensão que aparece nos terminais do enrolamento secundário Volts L2 Indutância do circuito secundário Henries XL2 Reatância indutiva do circuito secundário Ohms Z2 Impedância do circuito secundário (excluída a carga) Ohms φ1 Componente de dispersão do fluxo que concatena apenas com a bobina 1 Weber φ2 Componente de dispersão do fluxo que concatena apenas com a bobina 2 Weber
φm Fluxo mútuo, compartilhado por ambos os circuitos, concatenando as bobinas 1 e 2 Weber
M Indutância mútua (uma medida do acoplamento magnético) entre as duas bobinas (ou circuitos) produzida pelo fluxo mútuo (φm)
Henries
Quadro 1 - Definições do transformador de núcleo a ar . Fonte: Kosow, 1982, p. 512. .
A convenção dos pontos é adotada na figura 2, na qual atribui polaridade positiva a
tensão V1 e negativa a tensão induzida E1. A corrente I2 possui sentido contrário a corrente I1,
pois I1 produz φm, que induz a tensão E2 (de sentido contrário a E1) que gera I2. A polaridade
da tensão de carga V2 é orientada pelo sentido da corrente de carga IL = I2.
Um coeficiente de acoplamento, k, entre as duas bobinas é dado pela equação abaixo:
19
211m
m
.LL
Mk =
+=
φφφ
(2-1)
As duas bobinas estão frouxamente acopladas quando k é um valor pequeno, como no
transformador de núcleo de ar. As duas bobinas estão estreitamente acopladas quando k é um
valor próximo do unitário, como nos transformadores de potência que utilizam núcleo de ferro
(KOSOW, 1982).
2.1.2 O Transformador Ideal
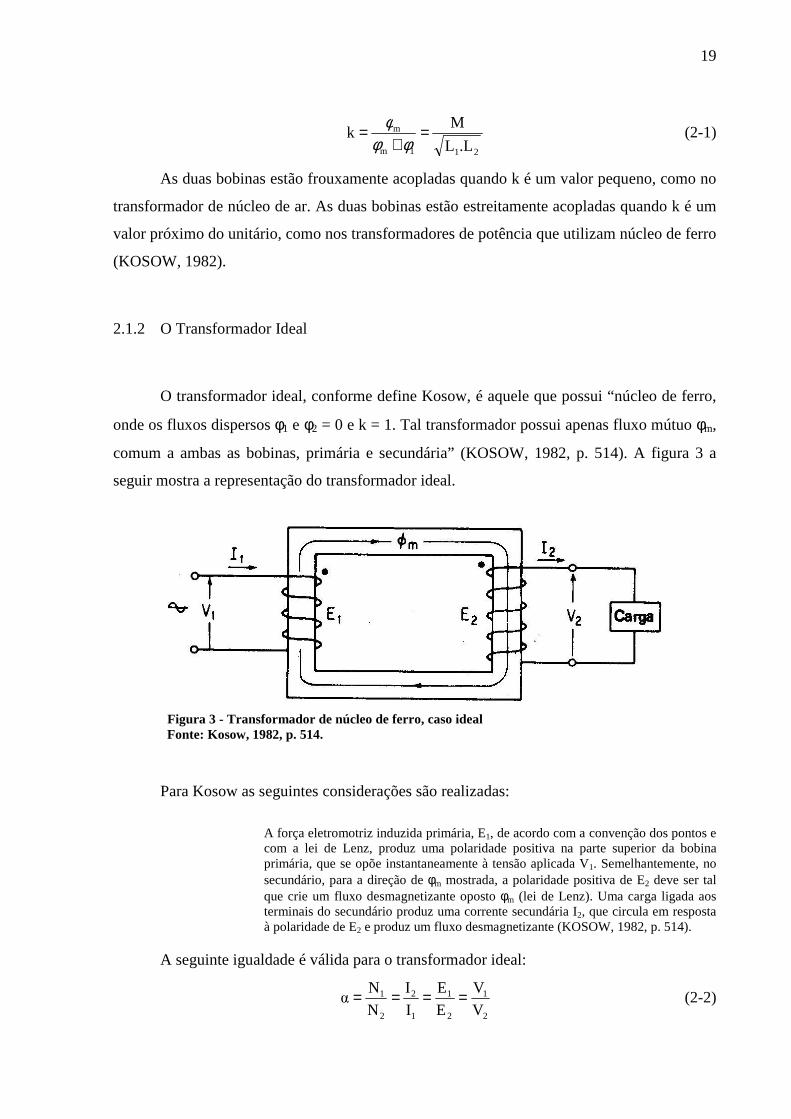
O transformador ideal, conforme define Kosow, é aquele que possui “núcleo de ferro,
onde os fluxos dispersos φ1 e φ2 = 0 e k = 1. Tal transformador possui apenas fluxo mútuo φm,
comum a ambas as bobinas, primária e secundária” (KOSOW, 1982, p. 514). A figura 3 a
seguir mostra a representação do transformador ideal.
Figura 3 - Transformador de núcleo de ferro, caso ideal . Fonte: Kosow, 1982, p. 514. .
Para Kosow as seguintes considerações são realizadas:
A força eletromotriz induzida primária, E1, de acordo com a convenção dos pontos e com a lei de Lenz, produz uma polaridade positiva na parte superior da bobina primária, que se opõe instantaneamente à tensão aplicada V1. Semelhantemente, no secundário, para a direção de φm mostrada, a polaridade positiva de E2 deve ser tal que crie um fluxo desmagnetizante oposto φm (lei de Lenz). Uma carga ligada aos terminais do secundário produz uma corrente secundária I2, que circula em resposta à polaridade de E2 e produz um fluxo desmagnetizante (KOSOW, 1982, p. 514).
A seguinte igualdade é válida para o transformador ideal:
2
1
2
1
1
2
2
1
V
V
E
E
I
I
N
Nα ==== (2-2)
20
Na qual N1 é o número de espiras do enrolamento primário, N2 é o número de espiras
do enrolamento secundário e α é a relação de transformação. A igualdade acima considera
desprezível a corrente de magnetização Im (ou corrente a vazio), uma vez que a componente
de carga da corrente primária, I1’, é muito maior que Im de maneira que I1 = I1’.
A relação volts/espira para os enrolamentos de alta e baixa tensão é diretamente
proporcional ao valor de pico do fluxo mútuo, φpm, e à freqüência, conforme expressa a
seguinte fórmula:
espira
volts.104,44f
N
E
N
E 8pm
2
2
1
1 −== φ (2-3)
O fluxo da fórmula acima é expresso em maxwell (KOSOW, 1982).
Segundo Simone, a unidade transformadora idealizada “não possui relutância
magnética; não possui dispersão de fluxo; não possui perdas no ferro e no cobre e não se
satura, ou seja, é magneticamente linear” (SIMONE, 1998, p. 35).
2.1.3 Impedância Refletida e Transformação de Impedâncias
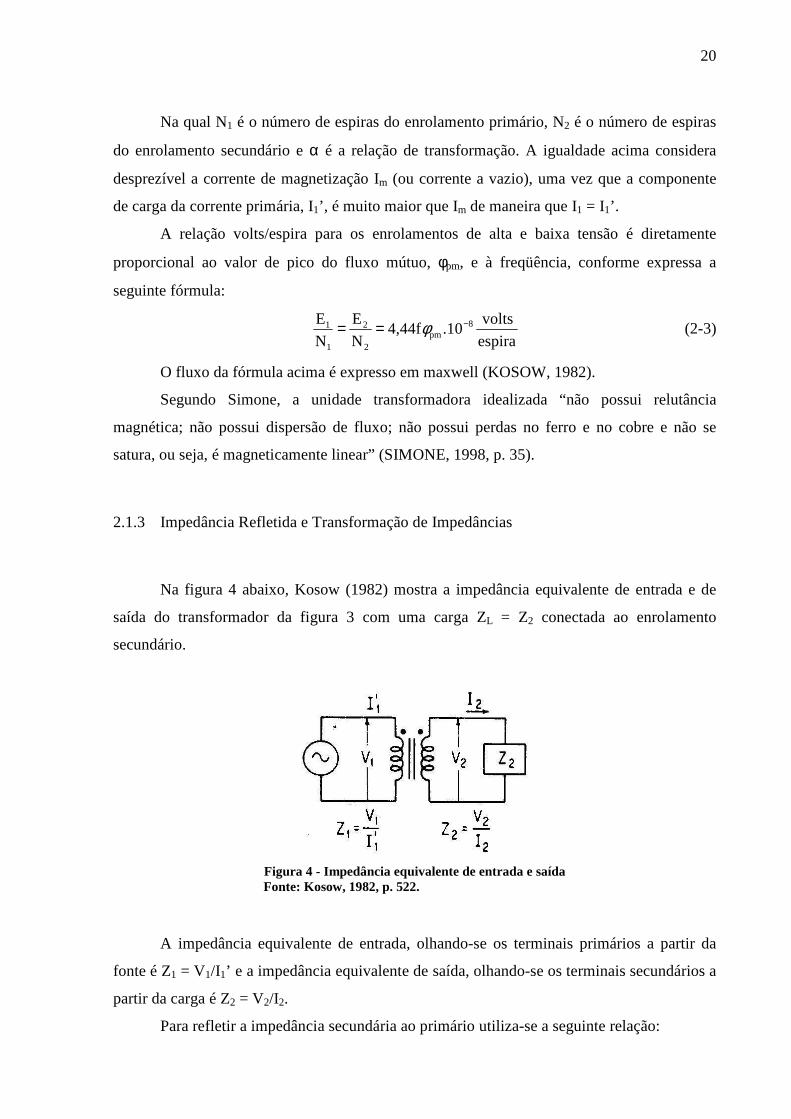
Na figura 4 abaixo, Kosow (1982) mostra a impedância equivalente de entrada e de
saída do transformador da figura 3 com uma carga ZL = Z2 conectada ao enrolamento
secundário.
Figura 4 - Impedância equivalente de entrada e saída Fonte: Kosow, 1982, p. 522. .
A impedância equivalente de entrada, olhando-se os terminais primários a partir da
fonte é Z1 = V1/I1’ e a impedância equivalente de saída, olhando-se os terminais secundários a
partir da carga é Z2 = V2/I2.
Para refletir a impedância secundária ao primário utiliza-se a seguinte relação:

21
22
1 ZαZ = ou 2
2
12
2
1
N
Nα
Z
Z
== (2-4)
“Desde que qualquer alteração na impedância de carga e na corrente do secundário
reflete-se como uma alteração na corrente primária, é, algumas vezes, conveniente simplificar
o transformador representando-o por um único circuito equivalente” (KOSOW, 1982, p. 522).
A representação do transformador real como um circuito equivalente será abordada na seção
2.1.5.
2.1.4 O Transformador Real
Kosow faz as seguintes considerações sobre o transformador real:
Um transformador real, de núcleo de ferro, carregado é representado na figura 5. Embora hermeticamente acoplado pelo núcleo de ferro, uma pequena porção de fluxo disperso é produzida nos enrolamentos primário e secundário, φ1 e φ2, respectivamente, além do fluxo mútuo, φm, como mostra a figura 5.
O fluxo disperso primário, φ1, produz uma reatância indutiva primária XL1. O fluxo disperso secundário, φ2, produz uma reatância indutiva secundária, XL2. Além disto, os enrolamentos primário e secundário são constituídos de condutores de cobre, que têm certa resistência. A resistência interna do enrolamento primário é r1 e do secundário é r2.
As resistências e reatâncias dos enrolamentos do primário e secundário, respectivamente, produzem quedas de tensão no interior do transformador, como resultado das correntes primária e secundária. Embora estas quedas de tensão sejam internas, é conveniente representá-las externamente como parâmetros puros em série com um transformador ideal, como mostra a figura 6. O transformador ideal, mostrado na figura 6, é imaginado sem quedas internas nas resistências e reatâncias de seus enrolamentos. A dispersão foi incluída na queda de tensão primária I1Z1 e na queda de tensão secundária, I2Z2. Uma vez que estas são quedas de tensão indutivas, pela teoria da corrente alternativa podemos dizer que a impedância interna primária do transformador é Z1 = r1 + jXL1 (2-5) onde todos os termos foram definidos no quadro 1 e a impedância secundária interna do transformador é Z2 = r2 + jXL2 (2-6) onde todos os termos foram definidos no quadro 1 (KOSOW, 1982, p. 524).
A figura 5 abaixo ilustra os fluxos estabelecidos no transformador real.

22
Figura 5 - Fluxos dispersos em um transformador real carregado . Fonte: Kosow, 1982, p. 524. .
A figura 6 abaixo ilustra o transformador real e seus parâmetros construtivos.
Figura 6 - Resistências e reatâncias primárias e secundárias, ocasionando quedas de tensão num
transformador real . Fonte: Kosow, 1982, p. 524. .
Segundo Kosow, de posse das medições de tensão terminal e de corrente, pode-se
computar a força eletromotriz (fem) induzida no primário e no secundário utilizando as
seguintes relações:
)jX(rIV)Z(IVE L111
.
1
.
11
.
1
.
1 +−=−= (2-7)
)jX(rIV)Z(IVE L222
.
2
.
22
.
2
.
2 ++=+= (2-8)
Tais relações provêm da análise da figura 6. Assim, a tensão terminal aplicada ao
primário, V1, é maior que a fem induzida no enrolamento primário, E1. A fem induzida no
enrolamento secundário, E2, é maior que a tensão nos terminais do secundário, V2 (KOSOW,
1982).

23
2.1.5 Circuitos Equivalentes para um Transformador Real de Potência
Segundo Kosow (1982), o circuito equivalente de um transformador real de potência é
mostrado na figura 7 abaixo.
Figura 7 - Circuito equivalente de um transformador real de potência . Fonte: Kosow, 1982, p. 527. .
O transformador da figura 7 pode ter suas resistências e reatâncias internas associadas
e referidas ao primário, conforme mostra a figura 8 abaixo.
Figura 8 - Circuito equivalente aproximado com resistências e reatâncias refletidas . Fonte: Kosow, 1982, p. 527. .
Sobre as figuras acima, as seguintes considerações são realizadas por Kosow:
A corrente primária, I1, é a soma da componente primária de magnetização, Im, e da componente correspondente à corrente de carga I1’, na figura 7. Além disto, Rm representa o parâmetro equivalente às perdas de potência no ferro do núcleo do transformador (perdas por histerese e por correntes parasitas) e devido à corrente de magnetização, Im. Note-se que XLm está em paralelo com Rm e representa a componente reativa do transformador (circuito aberto).
A figura 7 é a representação de um transformador que satisfaz as condições dele a vazio e carregado. Se o secundário do transformador mostrado está a circuito aberto, I1’ = 0, e apenas Im circula (I1 = Im) produzindo uma pequena queda interna de tensão na impedância primária Z1 (igual a r1 + jXL1). Desde que a impedância primária Z1 e a queda de tensão primária I1Z1 são relativamente pequenas, é possível obter-se um circuito equivalente aproximado deslocando o ramo paralelo L-R
24
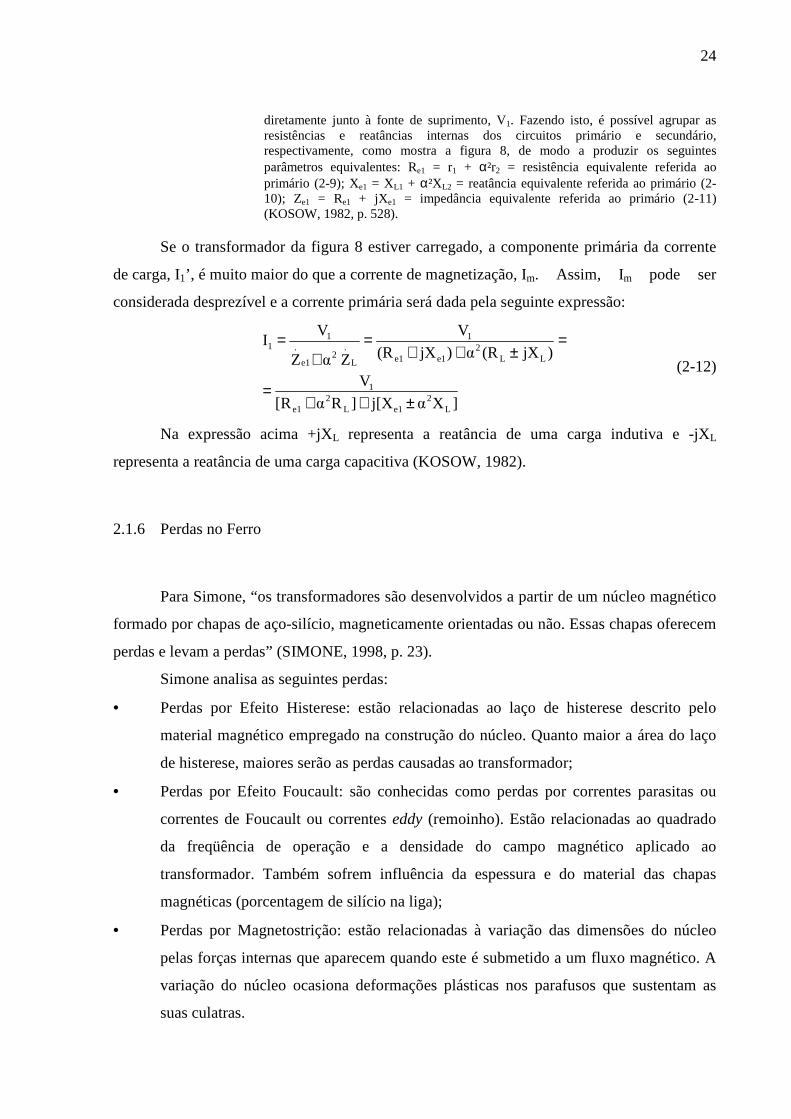
diretamente junto à fonte de suprimento, V1. Fazendo isto, é possível agrupar as resistências e reatâncias internas dos circuitos primário e secundário, respectivamente, como mostra a figura 8, de modo a produzir os seguintes parâmetros equivalentes: Re1 = r1 + α²r2 = resistência equivalente referida ao primário (2-9); Xe1 = XL1 + α²XL2 = reatância equivalente referida ao primário (2-10); Ze1 = Re1 + jXe1 = impedância equivalente referida ao primário (2-11) (KOSOW, 1982, p. 528).
Se o transformador da figura 8 estiver carregado, a componente primária da corrente
de carga, I1’, é muito maior do que a corrente de magnetização, Im. Assim, Im pode ser
considerada desprezível e a corrente primária será dada pela seguinte expressão:
]Xαj[X]Rα[R
V
)jX(Rα)jX(R
V
ZαZ
VI
L2
e1L2
e1
1
LL2
e1e1
1
L
.2
e1
.1
1
±++=
=±++
=+
=
(2-12)
Na expressão acima +jXL representa a reatância de uma carga indutiva e -jXL
representa a reatância de uma carga capacitiva (KOSOW, 1982).
2.1.6 Perdas no Ferro
Para Simone, “os transformadores são desenvolvidos a partir de um núcleo magnético
formado por chapas de aço-silício, magneticamente orientadas ou não. Essas chapas oferecem
perdas e levam a perdas” (SIMONE, 1998, p. 23).
Simone analisa as seguintes perdas:
• Perdas por Efeito Histerese: estão relacionadas ao laço de histerese descrito pelo
material magnético empregado na construção do núcleo. Quanto maior a área do laço
de histerese, maiores serão as perdas causadas ao transformador;
• Perdas por Efeito Foucault: são conhecidas como perdas por correntes parasitas ou
correntes de Foucault ou correntes eddy (remoinho). Estão relacionadas ao quadrado
da freqüência de operação e a densidade do campo magnético aplicado ao
transformador. Também sofrem influência da espessura e do material das chapas
magnéticas (porcentagem de silício na liga);
• Perdas por Magnetostrição: estão relacionadas à variação das dimensões do núcleo
pelas forças internas que aparecem quando este é submetido a um fluxo magnético. A
variação do núcleo ocasiona deformações plásticas nos parafusos que sustentam as
suas culatras.

25
No modelo do transformador discutido no início da seção 2.1.5, estas perdas são
representadas por uma resistência Rm (SIMONE, 1998).
2.1.7 Ensaio em Vazio
Kosow faz as seguintes considerações sobre o transformador ideal da seção 2.1.2
operando com o enrolamento secundário a vazio (aberto):
1. Imagine um circuito aberto, impedância infinita ou carga zero no secundário, e I2 = 0. 2. Como resultado do fluxo alternativo mútuo φm (criado pela tensão aplicada), são produzidas forças eletromotrizes E1 e E2 tendo a polaridade instantânea mostrada com respeito à φm (figura 3). 3. Uma pequena corrente primária, Im, conhecida como corrente de magnetização, deve circular mesmo quando o transformador está descarregado. A corrente é pequena, porque a fem induzida primária, E1, se opõe a tensão aplicada, V1, a cada instante. O valor de Im é uma função primariamente da relutância do circuito magnético, ℜm, e do valor de pico do fluxo mútuo magnetizante, φpm, para um dado número de espiras primárias. 4. Como mostra a figura 9, o valor pequeno de Im se atrasa, em relação à tensão primária, de 90° produzindo φm. 5. φm, por sua vez, requer 90° para produzir as tensões induzidas primária e secundária, E1 e E2. Estas tensões induzidas estão em fase uma com a outra, por serem ambas produzidas por φm. Note-se que E1 na Figura 9 opõe-se a V1 (lei de Lenz). Sem carga a figura 9 representa todas as relações de corrente e tensão num transformador ideal (KOSOW, 1982, p. 515).
Figura 9 - Relações primárias a vazio . Fonte: Kosow, 1982, p. 515. .
Segundo Simone (1998), o ensaio em vazio é realizado no transformador real para a
determinação das perdas em vazio, Po, e da corrente de excitação, Io. A corrente de excitação
do transformador real é formada por duas parcelas bem caracterizadas:
.
m
.
p
.
o III += (2-13)
Ou seja, a corrente de excitação é formada pela parcela relativa às perdas do núcleo, Ip,
e pela corrente de magnetização, Im.
Como pode ser observado, os autores Kosow e Simone usam nomenclaturas diferentes
para o ramo paralelo do modelo do transformador. Kosow chama a corrente de excitação
26
como corrente de magnetização e Simone usa a nomenclatura usual diferenciando a corrente
de excitação da corrente de magnetização, conforme define a fórmula (2-13).
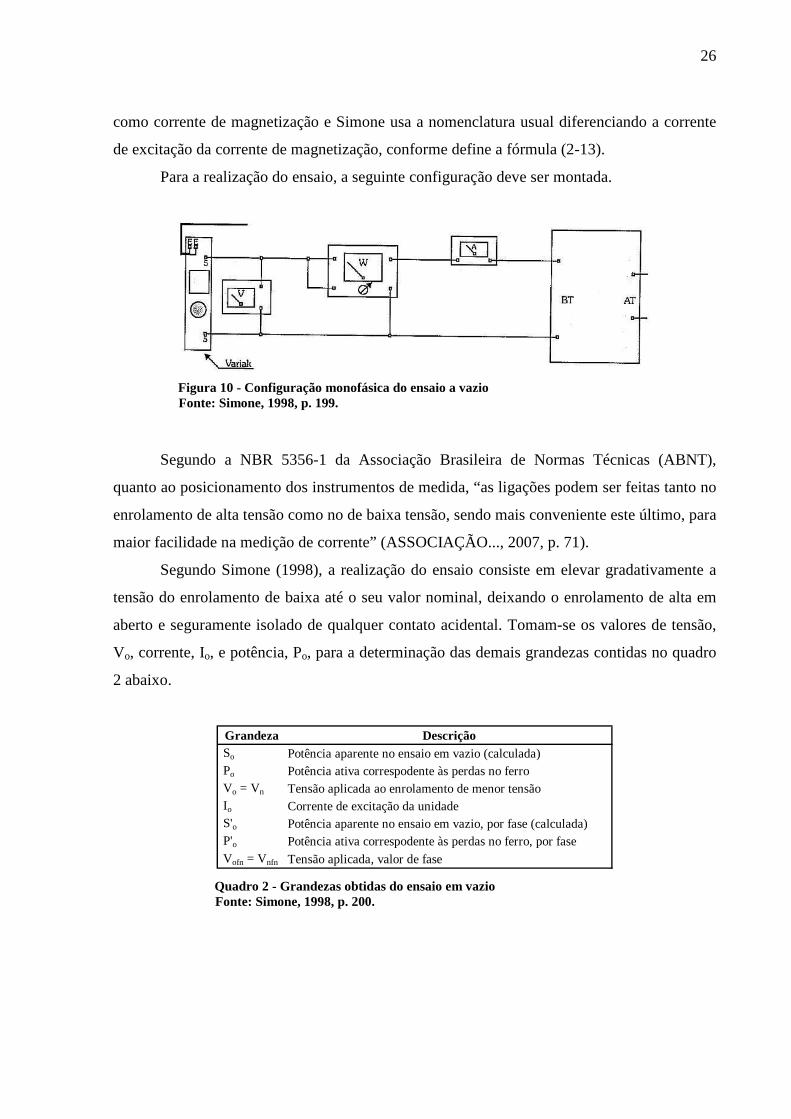
Para a realização do ensaio, a seguinte configuração deve ser montada.
Figura 10 - Configuração monofásica do ensaio a vazio . Fonte: Simone, 1998, p. 199. .
Segundo a NBR 5356-1 da Associação Brasileira de Normas Técnicas (ABNT),
quanto ao posicionamento dos instrumentos de medida, “as ligações podem ser feitas tanto no
enrolamento de alta tensão como no de baixa tensão, sendo mais conveniente este último, para
maior facilidade na medição de corrente” (ASSOCIAÇÃO..., 2007, p. 71).
Segundo Simone (1998), a realização do ensaio consiste em elevar gradativamente a
tensão do enrolamento de baixa até o seu valor nominal, deixando o enrolamento de alta em
aberto e seguramente isolado de qualquer contato acidental. Tomam-se os valores de tensão,
Vo, corrente, Io, e potência, Po, para a determinação das demais grandezas contidas no quadro
2 abaixo.
Grandeza Descrição So Potência aparente no ensaio em vazio (calculada) Po Potência ativa correspodente às perdas no ferro Vo = Vn Tensão aplicada ao enrolamento de menor tensão Io Corrente de excitação da unidade S'o Potência aparente no ensaio em vazio, por fase (calculada) P'o Potência ativa correspodente às perdas no ferro, por fase Vofn = Vnfn Tensão aplicada, valor de fase
Quadro 2 - Grandezas obtidas do ensaio em vazio . Fonte: Simone, 1998, p. 200. .

27
2.1.7.1 Determinação do Ramo de Magnetização: Rm e XLm
Para Simone (1998), após a coleta dos dados de ensaio, determina-se o fator de
potência do transformador em vazio utilizando a seguinte relação:
=
oofn
oo .IV
P')cos(ϕ (2-14)
Com o fator de potência obtido da aplicação da fórmula acima, determina-se Ip e Im
através das seguintes fórmulas:
).cos(II oop ϕ= (2-15)
).sen(II oom ϕ= (2-16)
Determinadas as correntes Ip e Im, determina-se Rm e XLm pelas seguintes fórmulas:
=
p
ofnm I
VR (2-17)
=
m
ofnLm I
VX (2-18)
Simone destaca a seguinte conclusão:
O fato de definir e trabalhar com uma reatância de magnetização implica em admitir que o sistema magnético da unidade transformadora é magneticamente linear. Isto é um procedimento passível no estudo dos transformadores, se estes forem projetados dentro da região linear da curva B = B (H) (SIMONE, 1998, p. 204).
2.2 O CONTROLE UNIFICADO DE TENSÃO (CUT)
2.2.1 Definições
Segundo Ogata, “os avanços na teoria e na prática do controle automático propiciam
meios para se atingir desempenho ótimo de sistemas dinâmicos” (OGATA, 1998, p. 1). Ogata
faz as seguintes definições pertinentes ao controle unificado de tensão:
Variável Controlada e Variável Manipulada. A variável controlada é a grandeza ou a condição que é medida e controlada. A variável manipulada é a grandeza ou a condição variada pelo controlador de modo a afetar o valor da variável controlada. A variável controlada é normalmente a grandeza de saída do sistema. Controlar significa medir o valor da variável controlada e aplicar o valor conveniente da
28
variável manipulada ao sistema de modo a corrigir ou limitar o desvio entre o valor medido e o valor desejado da variável controlada.
Sistemas a Controlar (Plants). Um sistema a controlar é uma parte de um equipamento, eventualmente um conjunto de itens de uma máquina que funcionam juntos e cuja finalidade é desempenhar uma determinada operação.
Sistemas. Um sistema é uma combinação de componentes que atuam em conjunto e realizam um certo objetivo. Um sistema não é limitado apenas a algo físico. O conceito de sistema pode ser aplicado a fenômenos abstratos, dinâmicos, como os encontrados em Economia. A palavra sistema deve, por conseguinte, ser interpretada para designar sistemas físicos, biológicos, econômicos e outros.
Distúrbios. Um distúrbio ou perturbação é caracterizado por um sinal que tende a afetar de modo adverso o valor da variável de saída de um sistema. Se um distúrbio for gerado internamente no sistema, ele é dito um distúrbio interno; ao passo que um distúrbio externo é produzido fora do sistema e se comporta como um sinal de entrada no sistema.
Controle com Retroação. Controle com retroação ou a malha fechada se refere a uma operação que, em presença de distúrbios, tende a reduzir a diferença entre o sinal de saída de um sistema e o sinal de referência, e que opera com base nesta diferença. Aqui, apenas os distúrbios não-previsíveis (isto é, aqueles não conhecidos a priori) são designados como tais, uma vez que as perturbações conhecidas ou previsíveis podem sempre ser compensadas no sistema (OGATA, 1998, p. 2).
Segundo a Copel, “O Controle Unificado de Tensão, CUT, é um processo do SASE
capaz de controlar combinadamente a tensão e o nível de reativo nas barras de carga atuando
em um único equipamento ou num conjunto deles, composto de transformador, banco de
reguladores de tensão, BRT, e banco de capacitores” (COMPANHIA..., 2009, p. 213).
Para a Copel, O CUT é formado pelo controle automático de tensão (CAT) e pelo
controle automático de reativo (CAR), considerando o transformador como equipamento
principal e os bancos de capacitores como equipamentos auxiliares. Os dois controles serão
detalhados nas próximas seções.
As lógicas dos controles de tensão e de reativo utilizam um modelo de transformador,
denominado Modelo de Transformador de Três Enrolamentos, para prever o efeito da
comutação dos bancos de capacitores sobre as tensões das barras de carga. O modelo de
transformador necessita dos seguintes dados de entrada:
• A impedância equivalente do sistema vista pela subestação;
• As impedâncias dos enrolamentos do transformador;
• As tensões nominais do transformador;
• A potência nominal de cada banco de capacitores configurado como equipamento
auxiliar;
• Medições de valores de tensão e potência na entrada e saída do transformador;
• Os valores de tape máximo e mínimo do transformador.

29
Operacionalmente, é definido que o controle de tensão tem prioridade sobre o controle
de reativo (COMPANHIA..., 2009).
2.2.2 O Controle Automático de Tensão (CAT)
Sobre um controlador automático, Ogata faz as seguintes considerações aplicáveis ao
CAT:
Um controlador automático compara o valor real da grandeza de saída do processo com a grandeza de referência (valor desejado), determina o desvio e produz um sinal de controle que reduzirá o desvio a zero ou a um valor pequeno. A maneira pela qual o controlador automático produz o sinal de controle é chamada ação de controle (OGATA, 1998, p. 177).
A figura 11 abaixo mostra o diagrama de blocos de um sistema de controle com um
controlador automático.
Figura 11 - Diagrama de blocos de um sistema de controle . Fonte: Ogata, 1998, p. 178. .
A seguinte descrição do funcionamento do sistema de controle acima é realizada por
Ogata:
O controlador detecta o sinal de erro atuante, usualmente em um baixo nível de potência, e amplifica até um nível suficientemente alto. O sinal de saída do controlador automático alimenta algum tipo de atuador tal como um motor ou válvula pneumática, um motor hidráulico ou um motor elétrico. O atuador é um dispositivo de potência que produz o sinal destinado a agir sobre o processo, de acordo com o sinal de controle, de tal modo que o sinal de retroação tenda ao valor do sinal de referência.
O sensor ou elemento de medição é um dispositivo que converte a variável de saída em uma outra variável adequada, tal como um deslocamento, uma pressão ou uma tensão elétrica que pode ser usada para comparar o sinal de saída com o sinal de referência. Este elemento fica no elo de retroação do sistema a malha fechada. O

30
valor do ponto de ajuste do controlador (set point) deve ser convertido em um sinal de referência com as mesmas unidades que o sinal de retroação proveniente do sensor ou elemento de medição (OGATA, 1998, p. 178).
2.2.2.1 Algoritmo de Integração ∆V.∆T
O algoritmo de integração ∆V.∆T utilizado pelo CAT pode ser referenciado por Ogata
mediante as seguintes considerações sobre a ação de controle integral:
Em um controlador com a ação de controlador integral o valor de saída do controlador u(t) é variado segundo uma taxa proporcional ao sinal de erro atuante
e(t). Isto é: du(t)/dt = Kie(t) ou ∫=t
0
i e(t)dtKu(t) (2-19). Onde Ki é uma constante
ajustável. A função de transferência do controlador integral é U(s)/E(s) = Ki/s. Se o valor de e(t) for dobrado, então o valor de u(t) varia duas vezes mais rápido. Para erro atuante nulo, o valor de u(t) permanece estacionário. A ação de controle integral é muitas vezes denominada controle de restabelecimento (reset). A figura 12 mostra um diagrama de blocos desse tipo de controlador (OGATA, 1998, p. 180).
Figura 12 - Diagrama de blocos de um controlador integral Fonte: Ogata, 1998, p. 181. .
Ogata faz as seguintes considerações sobre os efeitos da ação de controle integral
sobre o desempenho de um sistema:
No controle integral de um processo, o sinal de controle, o sinal de saída do controlador, em qualquer instante é igual à área sob a curva do sinal de erro atuante até aquele instante. O sinal de controle u(t) pode possuir um valor não-nulo quando o sinal de erro atuante e(t) for nulo, conforme indicado na figura 13 (OGATA, 1998, p. 183).
Figura 13 - Curvas e(t) e u(t) do controle integral Fonte: Ogata, 1998, p. 183. .

31
Sobre a figura 13, Ogata menciona que “a ação de controle integral, embora remova o
erro residual ou erro em regime estacionário, pode resultar em uma resposta oscilatória com
amplitude lentamente decrescente ou mesmo com amplitude crescente, ambas usualmente
indesejáveis” (OGATA, 1998, p. 184) .
A Copel descreve a lógica do algoritmo de integração ∆V.∆T da seguinte maneira:
A cada varredura de atualização de CAT, o desvio de tensão em relação ao limite da faixa de controle, ∆V, é multiplicado pelo valor do intervalo de tempo da varredura do CAT, ∆T, resultando num valor de área, ∆V.∆T. O valor apurado em cada varredura é somado aos anteriores resultando numa totalização que é a integração dos desvios de tensão ao longo do tempo.
A soma das amostras de tensão é feita da seguinte forma: o valor ∆V.∆T é somado ao total, Σ∆V.∆T, se a tensão superar o limite da faixa (fora da faixa) ou subtraído do total se a tensão ficar dentro dos limites da faixa. As subtrações podem ocorrer até que o valor Σ∆V.∆T seja zerado, não atingindo nunca valores negativos.
O valor total da soma das amostras, Σ∆V.∆T, é zerado e a integração é reiniciada se: entre uma varredura e outra a tensão passar de um ponto acima do limite superior da faixa para um ponto abaixo do limite inferior da faixa ou vice-versa; atualmente a tensão está abaixo do limite da faixa e a última ultrapassagem de limite de tensão foi para acima da faixa, sendo que na varredura imediatamente anterior, a tensão estava dentro da faixa. A mesma lógica vale para a situação simétrica. Esta lógica visa assegurar que as amostras sejam somadas apenas quando a tensão varia em torno de um dos limites, superior ou inferior, zerando o histórico de soma quando há transição do limite superior para o inferior ou vice-versa; após ocorrer um comando bem sucedido no equipamento de CAT devido ao valor total Σ∆V.∆T ter chegado ao limiar de comando (COMPANHIA..., 2009, p. 261).
Segundo a Copel, a figura 14 abaixo mostra um exemplo de integração em uma barra
de 13,8 kV.
Figura 14 - Exemplo de integração em uma barra de 13,8 kV . Fonte: Companhia..., 2009, p. 262. .

32
Da figura acima se definem os seguintes limites de tensão:
• VINF-F: limite de tensão inferior da faixa;
• VSUP-F: limite de tensão superior da faixa;
• VINF-BC: limite de tensão inferior da barra controlada;
• VSUP-BC: limite de tensão superior da barra controlada.
Na figura 14, quando a tensão está acima de VSUP-F as amostras ∆V são somadas
conforme representa a área vermelha. Quando a tensão está dentro da faixa, acima de VINF-F
e abaixo de VSUP-F, as amostras ∆V são subtraídas conforme representa a área verde.
A integração Σ∆V.∆T é realizada enquanto a tensão está dentro dos limites da barra
controlada, maior do que VINF-BC e menor do que VSUP-BC. Quando a tensão ultrapassa
estes limites o comando de tape é executado após uma curta temporização (COMPANHIA...,
2009). A figura 15 abaixo exemplifica a lógica de atuação do CAT.
Figura 15 - Lógica de atuação do CAT . Fonte: Companhia..., 2009, p. 262. .
2.2.2.2 CAT com Bancos de Capacitores Auxiliares
Segundo a Copel, os bancos de capacitores “são equipamentos auxiliares para controle
de tensão, usados quando o tape atinge o limite” (COMPANHIA..., 2009, p. 263).
Para a Copel, quando não há recurso de tape disponível para trazer a tensão para
dentro da faixa, o CAT poderá fazê-lo através do adequando chaveamento dos bancos de
capacitores disponíveis.
O Modelo de Transformador de Três Enrolamentos é utilizado pelo CAT para prever o
efeito do chaveamento dos bancos sobre as tensões nas barras de carga. Conforme o resultado

33
desta previsão, o CAT poderá comandar o tape do comutador a fim de compensar o efeito de
conexão ou desconexão de um ou mais bancos (COMPANHIA..., 2009).
2.2.3 Determinação do Patamar de Carga
Segundo a Copel, o CUT classifica o nível de carregamento do circuito geral do
transformador conforme os seguintes patamares:
• Patamar de carga mínima (MIN);
• Patamar de carga leve (LEV);
• Patamar de carga média (MED);
• Patamar de carga pesada (PES).
Para cada patamar, o controle utiliza um conjunto de limites de tensão constituído por:
VINF-F, VSUP-F, VINF-BC e VSUP-BC.
O CUT define o patamar em que a carga se encontra pela interpretação da corrente de
referência percentual, I_REF%. Tal corrente é obtida mediante a seguinte relação:
∑∑=
SOI_AL_MAX_U
I_AL_MEDI_REF% (2-20)
Na qual: ΣI_AL_MED representa a corrente medida no circuito geral do
transformador que se conecta a barra de referência de controle de tensão; ΣI_AL_MAX_USO
representa a corrente máxima da semana anterior do mesmo circuito geral de ΣI_AL_MED
(COMPANHIA..., 2009).
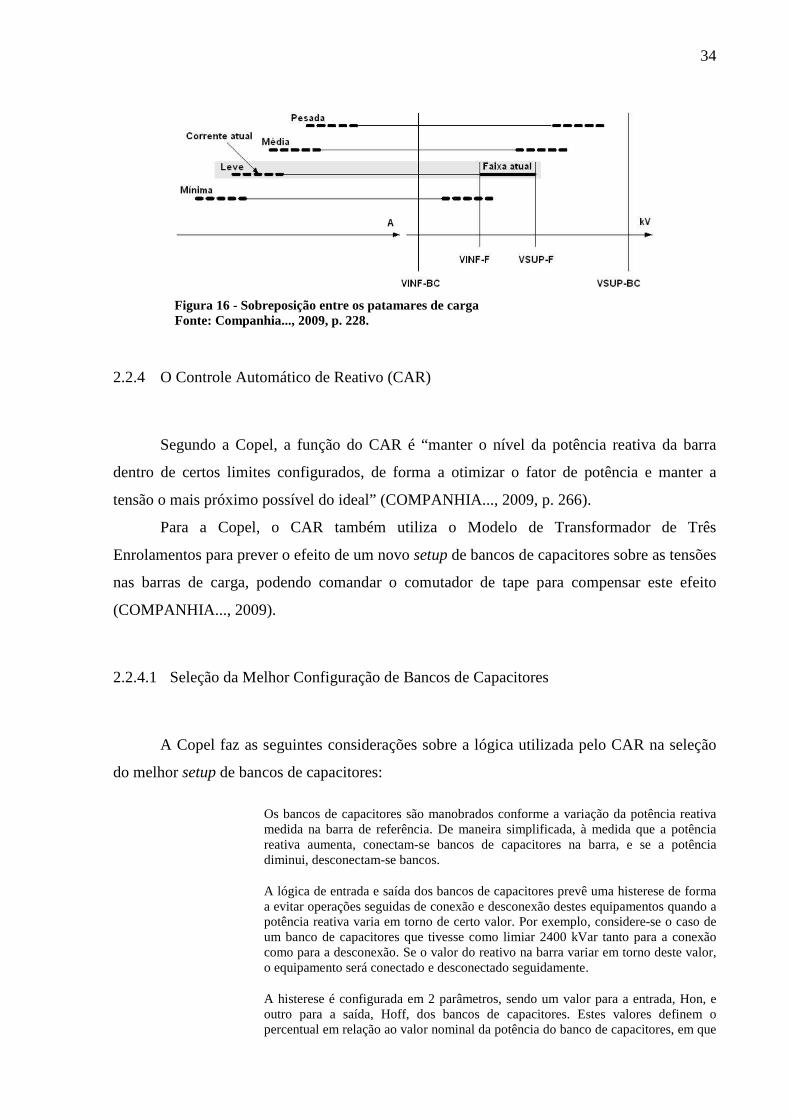
Quanto aos valores de I_REF%, a Copel recomenda que “haja superposição entre as
faixas de corrente de forma que haja uma histerese evitando que ocorram sucessivas
mudanças de patamar quando o valor da corrente oscila entre os limites máximo de uma faixa
e o mínimo da faixa seguinte” (COMPANHIA..., 2009, p. 228). A figura 16 abaixo ilustra a
sobreposição entre os patamares de carga.
34
Figura 16 - Sobreposição entre os patamares de carga . Fonte: Companhia..., 2009, p. 228. .
2.2.4 O Controle Automático de Reativo (CAR)
Segundo a Copel, a função do CAR é “manter o nível da potência reativa da barra
dentro de certos limites configurados, de forma a otimizar o fator de potência e manter a
tensão o mais próximo possível do ideal” (COMPANHIA..., 2009, p. 266).
Para a Copel, o CAR também utiliza o Modelo de Transformador de Três
Enrolamentos para prever o efeito de um novo setup de bancos de capacitores sobre as tensões
nas barras de carga, podendo comandar o comutador de tape para compensar este efeito
(COMPANHIA..., 2009).
2.2.4.1 Seleção da Melhor Configuração de Bancos de Capacitores
A Copel faz as seguintes considerações sobre a lógica utilizada pelo CAR na seleção
do melhor setup de bancos de capacitores:
Os bancos de capacitores são manobrados conforme a variação da potência reativa medida na barra de referência. De maneira simplificada, à medida que a potência reativa aumenta, conectam-se bancos de capacitores na barra, e se a potência diminui, desconectam-se bancos.
A lógica de entrada e saída dos bancos de capacitores prevê uma histerese de forma a evitar operações seguidas de conexão e desconexão destes equipamentos quando a potência reativa varia em torno de certo valor. Por exemplo, considere-se o caso de um banco de capacitores que tivesse como limiar 2400 kVar tanto para a conexão como para a desconexão. Se o valor do reativo na barra variar em torno deste valor, o equipamento será conectado e desconectado seguidamente.
A histerese é configurada em 2 parâmetros, sendo um valor para a entrada, Hon, e outro para a saída, Hoff, dos bancos de capacitores. Estes valores definem o percentual em relação ao valor nominal da potência do banco de capacitores, em que

35
o respectivo equipamento será conectado ou desconectado da barra. Por exemplo, se o banco de capacitores mencionado, de 2400 kVar, é o único disponível e for configurado um histerese de 60 % para entrada e 40 % para a saída, significa que: quando o reativo atingir 1440 kVar o banco será conectado; quando o reativo cair para 960 kVar o banco será desconectado.
Para um caso mais geral de múltiplus bancos de capacitores, a lógica de seleção considera uma lista com a combinação de todos os equipamentos disponíveis e aplica a seguinte fórmula: Q_comut = Q_comb_ante + (Q_comb_atual – Q_comb_ante) x H (2-21). Q_comut: valor do reativo da barra (carga) para o qual a combinação de banco de capacitores será selecionada como a ideal; Q_comb_atual: valor da potência da combinação atualmente em análise (linha atual); Q_comb_ante: valor da potência da combinação anterior à atual (linha anterior). Para a primeira combinação disponível de Q_comb_atual considera-se que Q_comb_ante = 0; H: histerese, em valor decimal, de entrada ou de saída (COMPANHIA..., 2009, p. 267-268).
36
3 PLATAFORMA DE TESTES
A plataforma de testes foi desenvolvida no software Matlab/Simulink®. A biblioteca
SimPowerSystemsTM do Simulink® foi utilizada, pois possui todos os blocos necessários para
a modelagem de uma subestação de distribuição em alta tensão.
A parte relevante para a análise de desempenho do controle unificado de tensão foi
implementada em m-file.
Assim, a plataforma de testes foi constituída pelo modelo da SE Andirá 138 kV
(ADA) e pelo modelo simplificado do controle unificado de tensão. Os dois modelos serão
detalhados nas próximas seções.
3.1 MODELO DA SE ANDIRÁ 138 kV
A subestação escolhida para o desenvolvimento da plataforma de testes foi a SE
Andirá 138 kV, localizada no nordeste do estado do Paraná.
Os seguintes fatores foram considerados para a escolha desta subestação:
• SE com um TF de carga. Esta característica simplifica a primeira análise de
desempenho do CUT e pode-se partir dela para análises com mais TFs;
• SE com três setores: 138 kV, 34,5 kV e 13,8 kV. Como o CUT atua na tensão de uma
barra por vez, a barra de referência selecionada, esta característica permite avaliar o
comportamento da tensão na outra barra;
• SE com dois bancos de capacitores na barra de 13,8 kV. Os bancos são configurados
como equipamentos auxiliares do CAT e são os principais equipamentos do CAR. Ou
seja, eles são fundamentais para avaliação da eficácia do CUT;
• SE com as medições confiáveis dos circuitos gerais dos três setores;
• SE com percentual de barras de carga dentro dos limites de tensão inferior a 90 %.
Este valor percentual norteia a análise de desempenho do CAT;
• SE com boa oscilação de fator de potência em patamares de carga média e pesada
(mínimo de 0,8 e máximo de 1,0). Estes valores norteiam a análise de desempenho do
CAR.
37
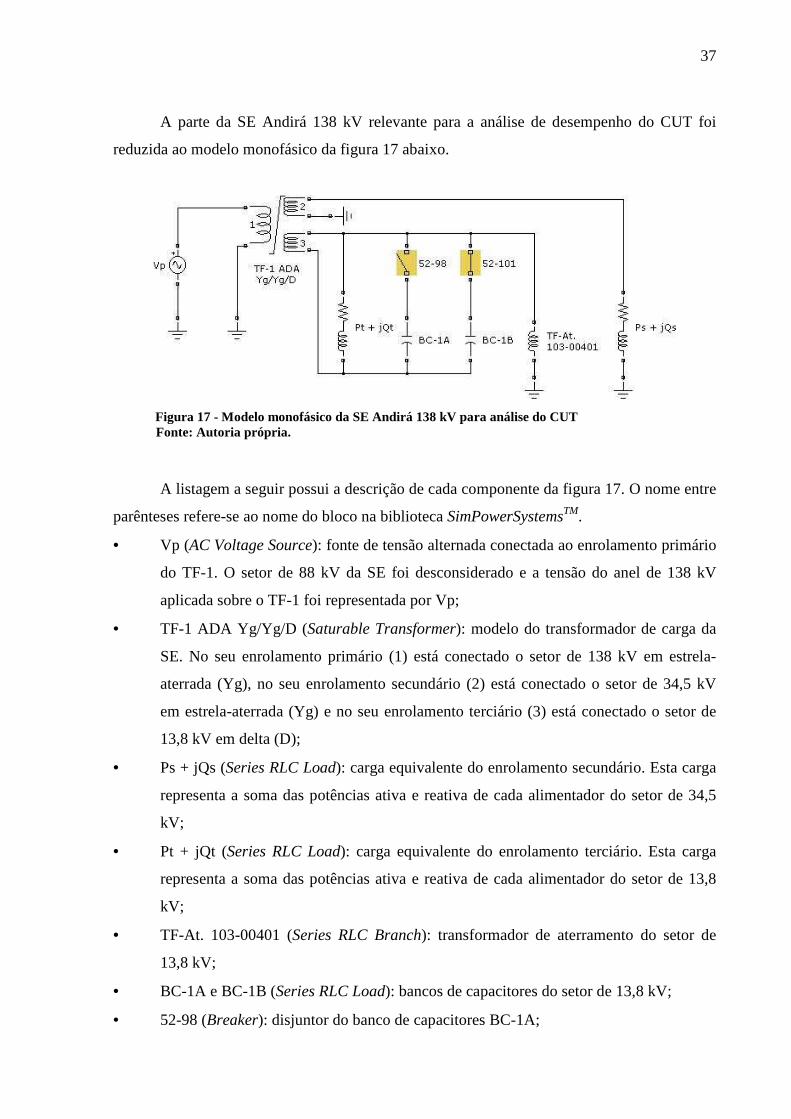
A parte da SE Andirá 138 kV relevante para a análise de desempenho do CUT foi
reduzida ao modelo monofásico da figura 17 abaixo.
Figura 17 - Modelo monofásico da SE Andirá 138 kV para análise do CUT . Fonte: Autoria própria. .
A listagem a seguir possui a descrição de cada componente da figura 17. O nome entre
parênteses refere-se ao nome do bloco na biblioteca SimPowerSystemsTM.
• Vp (AC Voltage Source): fonte de tensão alternada conectada ao enrolamento primário
do TF-1. O setor de 88 kV da SE foi desconsiderado e a tensão do anel de 138 kV
aplicada sobre o TF-1 foi representada por Vp;
• TF-1 ADA Yg/Yg/D (Saturable Transformer): modelo do transformador de carga da
SE. No seu enrolamento primário (1) está conectado o setor de 138 kV em estrela-
aterrada (Yg), no seu enrolamento secundário (2) está conectado o setor de 34,5 kV
em estrela-aterrada (Yg) e no seu enrolamento terciário (3) está conectado o setor de
13,8 kV em delta (D);
• Ps + jQs (Series RLC Load): carga equivalente do enrolamento secundário. Esta carga
representa a soma das potências ativa e reativa de cada alimentador do setor de 34,5
kV;
• Pt + jQt (Series RLC Load): carga equivalente do enrolamento terciário. Esta carga
representa a soma das potências ativa e reativa de cada alimentador do setor de 13,8
kV;
• TF-At. 103-00401 (Series RLC Branch): transformador de aterramento do setor de
13,8 kV;
• BC-1A e BC-1B (Series RLC Load): bancos de capacitores do setor de 13,8 kV;
• 52-98 (Breaker): disjuntor do banco de capacitores BC-1A;

38
• 52-101 (Breaker): disjuntor do banco de capacitores BC-1B.
O ANEXO A mostra as janelas de parâmetros de cada bloco listado acima, com os
valores preenchidos para os testes de validação do modelo da SE e de análise do modelo
simplificado do CUT. A obtenção dos parâmetros para a modelagem do TF-1 envolve uma
análise mais detalhada do equipamento, conforme descreve a próxima seção.
3.1.1 Modelagem do Transformador de Carga (TF-1)
O bloco Saturable Transformer da biblioteca SimPowerSystems foi utilizado para a
representação do modelo de transformador de carga da SE. O bloco é formado por um
transformador de três enrolamentos acoplados no mesmo núcleo, conforme mostra a figura 18
abaixo.
Figura 18 - Transformador de três enrolamentos acoplados no .
mesmo núcleo . Fonte: The MathWorks, 2003, p. 5-202. .
O bloco utiliza um modelo similar ao do transformador real da figura 6, acrescido do
ramo de magnetização da figura 7 e do enrolamento terciário.
A figura 19 lista os parâmetros de entrada do bloco Saturable Transformer,
preenchidos conforme o relatório de ensaios do TF-1 elaborado pelo fabricante Italtrafo.
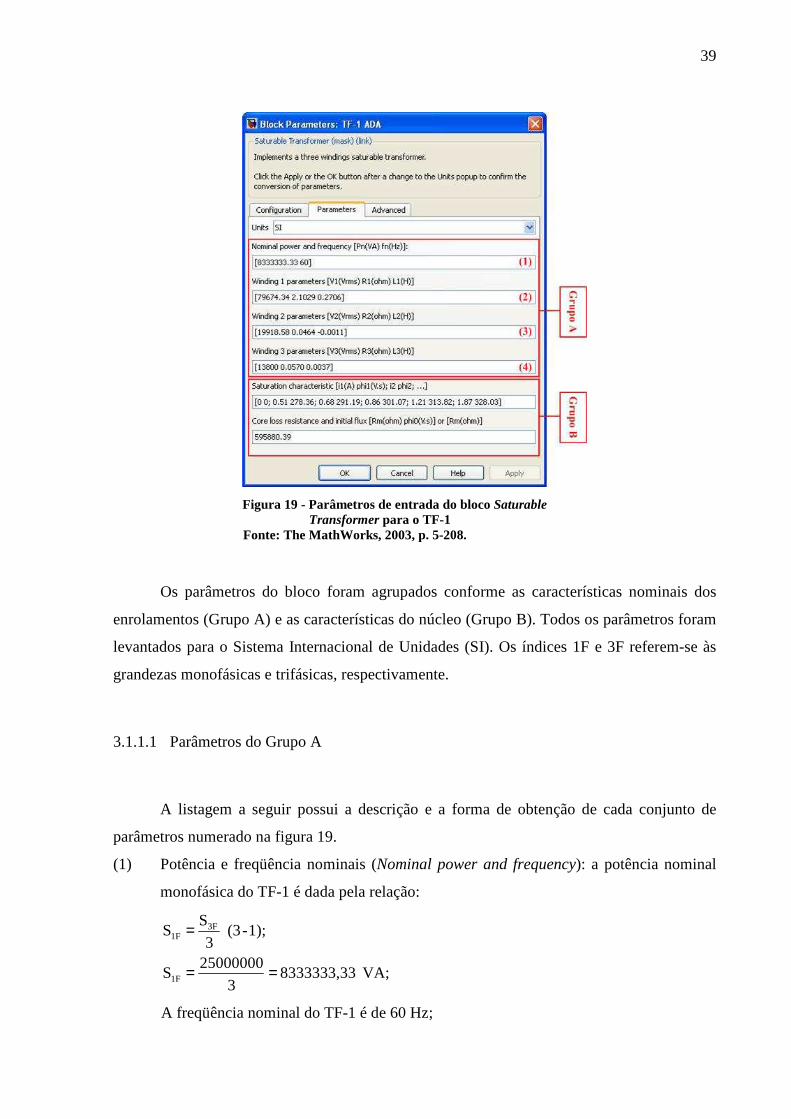
39
Figura 19 - Parâmetros de entrada do bloco Saturable .
Transformer para o TF-1 . Fonte: The MathWorks, 2003, p. 5-208. .
Os parâmetros do bloco foram agrupados conforme as características nominais dos
enrolamentos (Grupo A) e as características do núcleo (Grupo B). Todos os parâmetros foram
levantados para o Sistema Internacional de Unidades (SI). Os índices 1F e 3F referem-se às
grandezas monofásicas e trifásicas, respectivamente.
3.1.1.1 Parâmetros do Grupo A
A listagem a seguir possui a descrição e a forma de obtenção de cada conjunto de
parâmetros numerado na figura 19.
(1) Potência e freqüência nominais (Nominal power and frequency): a potência nominal
monofásica do TF-1 é dada pela relação:
VA; 8333333,333
25000000S
1);-(3 3
SS
1F
3F1F
==
=
A freqüência nominal do TF-1 é de 60 Hz;
40
(2) Parâmetros do enrolamento 1 (Winding 1 parameters): a tensão monofásica do
enrolamento primário (fase-terra) é dada pela relação:
V; 79674,343
138000V1
2);-(3 3
V1V1
1F
3F1F
==
=
A resistência do enrolamento primário é de R1 = 2,1029 Ohms;
A indutância do enrolamento primário é de L1 = 0,2706 Henries;
(3) Parâmetros do enrolamento 2 (Winding 2 parameters): a tensão monofásica do
enrolamento secundário (fase-terra) é dada pela aplicação da relação (3-2):
V; 19918,583
34500V2
;3
V2V2
1F
3F1F
==
=
A resistência do enrolamento secundário é de R2 = 0,0464 Ohms;
A indutância do enrolamento secundário é de L2 = -0,0011 Henries;
(4) Parâmetros do enrolamento 3 (Winding 3 parameters): a tensão monofásica do
enrolamento terciário (fase-fase) é dada pela igualdade:
V; 13800V3
3);-(3 V3V3
1F
3F1F
==
A resistência do enrolamento terciário é de R3 = 0,0570 Ohms;
A indutância do enrolamento terciário é de L3 = 0,0037 Henries.
Todos os parâmetros acima foram levantados para o tape nominal (posição 1, 138 kV).
3.1.1.2 Parâmetros do Grupo B
O primeiro parâmetro do Grupo B refere-se às características de saturação (Saturation
characteristic) do núcleo do TF-1.
A característica de saturação do núcleo pode ser modelada com ou sem histerese,
conforme a necessidade. Para uma análise transitória de energização de transformador em
vazio, por exemplo, a histerese é relevante e deve ser considerada. Vale ressaltar que o
esforço computacional para a modelagem de um transformador com histerese é
41
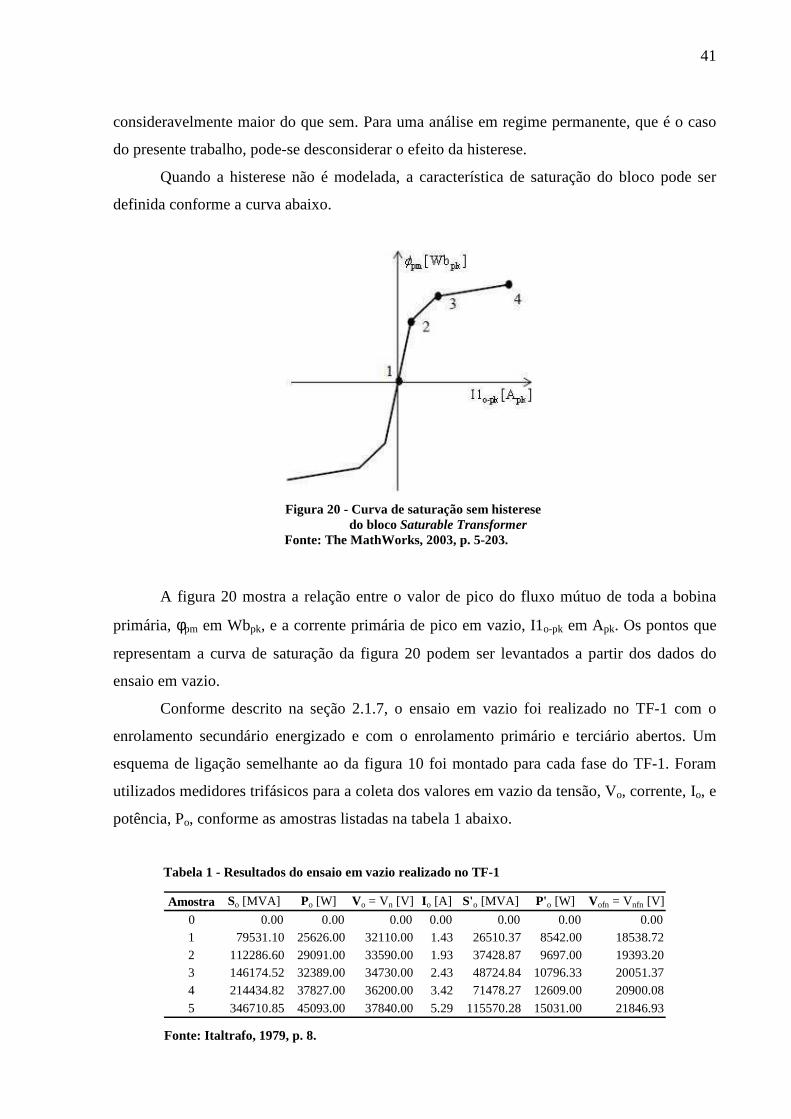
consideravelmente maior do que sem. Para uma análise em regime permanente, que é o caso
do presente trabalho, pode-se desconsiderar o efeito da histerese.
Quando a histerese não é modelada, a característica de saturação do bloco pode ser
definida conforme a curva abaixo.
Figura 20 - Curva de saturação sem histerese. do bloco Saturable Transformer . Fonte: The MathWorks, 2003, p. 5-203. .
A figura 20 mostra a relação entre o valor de pico do fluxo mútuo de toda a bobina
primária, φpm em Wbpk, e a corrente primária de pico em vazio, I1o-pk em Apk. Os pontos que
representam a curva de saturação da figura 20 podem ser levantados a partir dos dados do
ensaio em vazio.
Conforme descrito na seção 2.1.7, o ensaio em vazio foi realizado no TF-1 com o
enrolamento secundário energizado e com o enrolamento primário e terciário abertos. Um
esquema de ligação semelhante ao da figura 10 foi montado para cada fase do TF-1. Foram
utilizados medidores trifásicos para a coleta dos valores em vazio da tensão, Vo, corrente, Io, e
potência, Po, conforme as amostras listadas na tabela 1 abaixo.
Tabela 1 - Resultados do ensaio em vazio realizado no TF-1 .
Amostra So [MVA] Po [W] Vo = Vn [V] Io [A] S'o [MVA] P'o [W] Vofn = Vnfn [V]
0 0.00 0.00 0.00 0.00 0.00 0.00 0.001 79531.10 25626.00 32110.00 1.43 26510.37 8542.00 18538.722 112286.60 29091.00 33590.00 1.93 37428.87 9697.00 19393.203 146174.52 32389.00 34730.00 2.43 48724.84 10796.33 20051.374 214434.82 37827.00 36200.00 3.42 71478.27 12609.00 20900.08
5 346710.85 45093.00 37840.00 5.29 115570.28 15031.00 21846.93 Fonte: Italtrafo, 1979, p. 8. .

42
A tabela 1 foi preenchida conforme as grandezas mencionadas no quadro 2. Para os
valores calculados nas colunas So, S’o, P’o e Vofn = Vnfn as fórmulas abaixo foram utilizadas:
ooo .I.V3S = (3-4)
3
SS' o
o = (3-5)
3
PP' o
o = (3-6)
3
VVV o
nfnofn == (3-7)
De acordo com a figura 18, a característica de saturação (Lsat) do bloco Saturable
Transformer encontra-se no enrolamento primário. Assim, os resultados obtidos no ensaio em
vazio foram referidos ao primário, como mostra a tabela 2 abaixo.
Tabela 2 - Vofn e Io referido ao primário
Amostra V1ofn [V] I1o [A]
0 0.00 0.001 74154.87 0.362 77572.78 0.483 80205.50 0.614 83600.32 0.86
5 87387.74 1.32 Fonte: Autoria própria. .
A tabela 2 foi preenchida mediante a aplicação da fórmula (2-2) com os valores
obtidos no ensaio em vazio:
.4
II1
;V.4V1
4;V
V1
I1
I
;VV2
;V1V1
;II2
;I1I1
4;19918,58
79674,34
V2
V1
I1
I2α
oo
ofnofn
ofn
ofn
o
o
ofn1F
ofn1F
o1F
o1F
1F
1F
1F
1F12
=
=
==
==
==
====
43
De posse da tensão V1ofn, foi calculado o valor de pico do fluxo mútuo de toda a
bobina primária, φpm, através da aplicação da fórmula (2-3). Esta fórmula foi multiplicada
pelas N1 espiras que compõe o enrolamento primário, uma vez que ela foi definida para cada
espira.
8).-(3 266,40
V1
Hz; 60f
;V1E
];[Wb 4,44.f
E][maxwells .10
4,44.f
E
ofnpm
ofn1
pk1
pk81
pm
=
==
==
φ
φ
A força eletromotriz induzida, E1, foi considerada igual à tensão terminal, V1ofn, pois o
pequeno valor de I1o provoca uma queda de tensão desprezível no enrolamento primário.
A corrente primária de pico em vazio, I1o-pk, foi obtida através da fórmula:
opko I12.I1 =− (3-9)
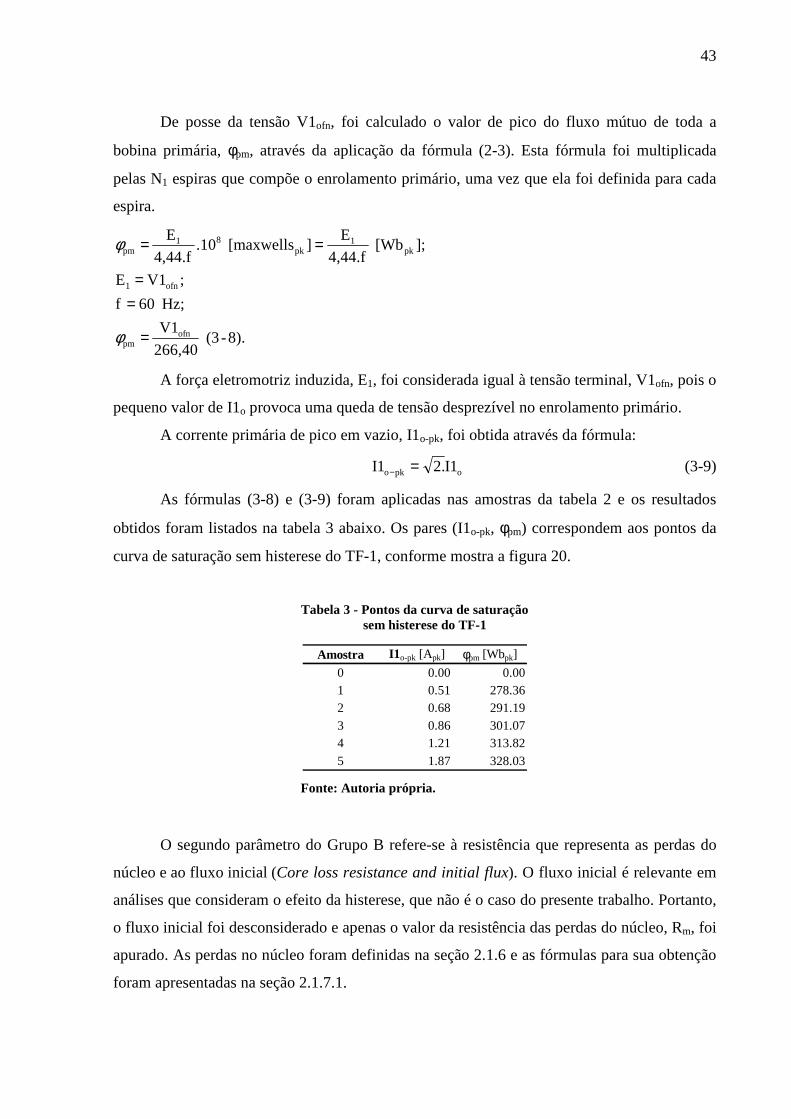
As fórmulas (3-8) e (3-9) foram aplicadas nas amostras da tabela 2 e os resultados
obtidos foram listados na tabela 3 abaixo. Os pares (I1o-pk, φpm) correspondem aos pontos da
curva de saturação sem histerese do TF-1, conforme mostra a figura 20.
Tabela 3 - Pontos da curva de saturação sem histerese do TF-1
Amostra I1o-pk [Apk] φpm [Wbpk]
0 0.00 0.001 0.51 278.362 0.68 291.193 0.86 301.074 1.21 313.82
5 1.87 328.03 Fonte: Autoria própria. .
O segundo parâmetro do Grupo B refere-se à resistência que representa as perdas do
núcleo e ao fluxo inicial (Core loss resistance and initial flux). O fluxo inicial é relevante em
análises que consideram o efeito da histerese, que não é o caso do presente trabalho. Portanto,
o fluxo inicial foi desconsiderado e apenas o valor da resistência das perdas do núcleo, Rm, foi
apurado. As perdas no núcleo foram definidas na seção 2.1.6 e as fórmulas para sua obtenção
foram apresentadas na seção 2.1.7.1.
44
O valor de Rm foi calculado para a amostra do ensaio em vazio com valor de tensão
aplicada o mais próximo da nominal. Tal valor corresponde ao da amostra 3, V1ofn =
80205,50 V, que é o mais próximo do valor nominal da tensão monofásica primária do TF-1,
V11F = 79674,34 V. Foi aplicada a fórmula (2-14) para obtenção do fator de potência em
vazio do TF-1:
0,2207.)cos(
;,6180205,50.0
10796,33)cos(
;.IV
P')cos(
o
o
oofn
oo
=
=
=
ϕ
ϕ
ϕ
De posse do cos(ϕo), foi calculada a parcela da corrente em vazio relacionada às
perdas no núcleo, Ip, através da fórmula (2-15):
A. 0,1346I
7;0,61.0,220I
);.cos(II
p
p
oop
=
=
= ϕ
Assim, foi obtido Rm pela aplicação da fórmula (2-17):
Ohms. 595880,39R
;0,1346
80205,50R
;I
VR
m
m
p
ofnm
=
=
=
3.1.2 Módulo do Ensaio em Vazio
O módulo do ensaio em vazio foi elaborado para validar os parâmetros do
transformador, apurados na seção anterior. A concepção do módulo foi baseada no que
descreve a seção 2.1.7, no entanto, considerou-se o enrolamento primário energizado e o
enrolamento secundário e terciário abertos. A figura 21 mostra o módulo do ensaio em vazio,
o qual foi baseado no esquema monofásico da figura 10.

45
Figura 21 - Módulo do ensaio em vazio . Fonte: Autoria própria. .
A listagem a seguir possui a descrição de cada componente da figura 21. O nome entre
parênteses refere-se ao nome do bloco na biblioteca SimPowerSystemsTM.
• V1ofn (AC Voltage Source): fonte de tensão alternada conectada ao enrolamento
primário do TF-1;
• R_Fonte (Series RLC Branch): representa a resistência interna da fonte de tensão
V1ofn;
• TF-1 ADA Yg/Yg/D (Saturable Transformer): mesmo modelo do transformador
descrito no inicio da seção 3.1. No seu enrolamento primário (1) está conectado a
fonte monofásica V1ofn, está aberto o seu enrolamento secundário (2) e terciário (3).
Os parâmetros do bloco foram preenchidos com os mesmos valores da figura 19;
• Multimetro (Multimeter): responsável pelas medições de V1ofn, I1o e E1;
• P’o | Q’o (Active Reactive Power): de posse dos valores de E1 (porta V) e I1o (porta I)
este bloco calcula as perdas em vazio por fase do TF-1, P’o;
• rms (RMS): a porta rms gera o valor médio quadrático ou valor root mean square
(rms) dos sinais de entrada da porta signal;
• Dpy_V1ofn | I1o | P’o | Q’o (Display): mostra os valores rms de V1ofn, I1o e P'o para
cada simulação;
• Continuous (Powergui): bloco que representa o ambiente de parametrização da
biblioteca SimPowerSystems.
O ANEXO A, na parte do módulo do ensaio em vazio, mostra as janelas de
parâmetros preenchidas para cada bloco listado acima. Os resultados das simulações
realizadas serão mostrados e analisados na seção 4.1.
46
3.2 MODELO SIMPLIFICADO DO CONTROLE UNIFICADO DE TENSÃO
O modelo simplificado do CUT foi desenvolvido tomando como referência as
definições realizadas na seção 2.2.1, conforme os pontos listados abaixo.
• Variáveis controladas: tensão e potência reativa do secundário ou do terciário,
conforme parametrizado no controlador. O controle da tensão tem prioridade sobre o
de reativo;
• Variáveis manipuladas: tape do comutador e os estados dos bancos de capacitores;
• Sistema a controlar: os principais equipamentos de uma subestação de energia, o
transformador com seu comutador de tapes e os bancos de capacitores;
• Sistema: sistema elétrico de potência associado à subestação onde se pretende
implementar o controle;
• Distúrbios: a) Interno: curto-circuito interno ou sobrecarga no transformador, abertura
de um elemento do banco de capacitores devido ao rompimento de fusível ou por uma
descarga indevida; b) Externo: surto de manobra, atuação de alguma proteção,
mudança na topologia do sistema, descargas atmosféricas, comportamento dinâmico e
imprevisível da carga;
• Controle com retroação: é o controle unificado de tensão, constituído pelo controle
automático de tensão e pelo controle automático de reativo.
O modelo simplificado do CUT foi desenvolvido com as principais funcionalidades
para a análise do seu desempenho. Tal modelo foi concebido por um conjunto de arquivos
gerenciados pelo m-file CUT.m. A figura 22 ilustra a relação dos arquivos do modelo e o
fluxo das variáveis entre eles.

47
Figura 22 - Arquivos do CUT e fluxo das variáveis . Fonte: Autoria própria. .
A composição e o funcionamento de cada arquivo serão detalhados nas próximas
seções.
3.2.1 Parametrização do Modelo Simplificado do CUT
Os parâmetros do CUT são enviados ao workspace pela simulação do modelo
Parametros_CUT.mdl. A figura 23 mostra este modelo.

48
Figura 23 - Parâmetros do CUT. Fonte: Autoria própria. .
A listagem a seguir possui a descrição de cada componente da figura 23.
• Par_TF_3E: parâmetros do Modelo de Transformador de Três Enrolamentos (Modelo
Copel) citado na seção 2.2.1. O bloco possui a tensão base (em kV) e a impedância
(em pu) de cada enrolamento do transformador. Também possui o número de tapes e
as relações de transformação máxima e mínima entre os enrolamentos (em pu). Estes
dados são agrupados no vetor com o mesmo nome do bloco, Par_TF_3E;
• Par_Sist: parâmetros relacionados ao sistema associado a SE em análise. O bloco
possui a potência base do sistema (em MVA) e a impedância equivalente do sistema
vista pela SE (em pu). Estes dados são agrupados no vetor com o mesmo nome do
bloco, Par_Sist;
• Par_CAT: parâmetros do CAT citados na seção 2.2.2. O bloco possui o campo para a
escolha da barra de referência de controle, o tempo de varredura do controle (em s) e o
limite ∆V.∆T para a execução de um comando (em kV.s). Estes dados são agrupados
no vetor com o mesmo nome do bloco, Par_CAT;
• Par_BCx: parâmetros dos bancos de capacitores existentes na SE. O bloco possui um
campo para cada barra conectada ao TF-1. Cada campo é preenchido com uma matriz
1xn das potências nominais (em Mvar) de cada um dos n banco de capacitores
conectados a barra. Estes dados são agrupados no vetor com o mesmo nome do bloco,
Par_BCx.
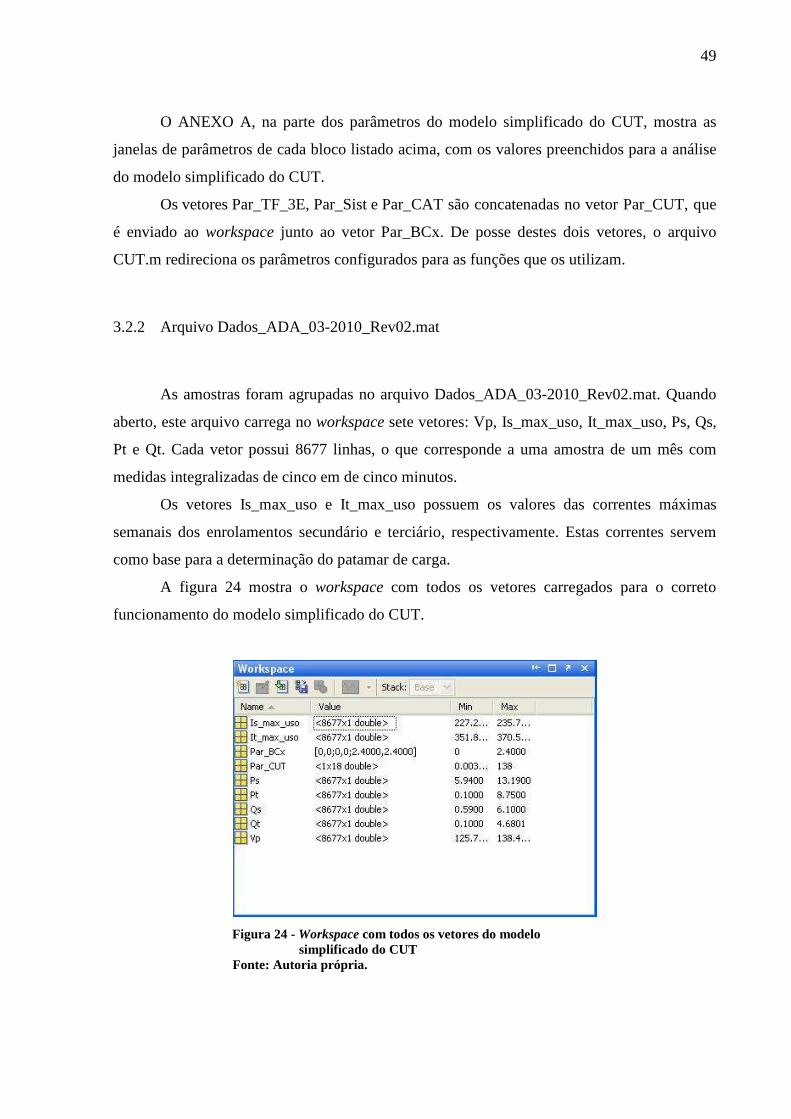
49
O ANEXO A, na parte dos parâmetros do modelo simplificado do CUT, mostra as
janelas de parâmetros de cada bloco listado acima, com os valores preenchidos para a análise
do modelo simplificado do CUT.
Os vetores Par_TF_3E, Par_Sist e Par_CAT são concatenadas no vetor Par_CUT, que
é enviado ao workspace junto ao vetor Par_BCx. De posse destes dois vetores, o arquivo
CUT.m redireciona os parâmetros configurados para as funções que os utilizam.
3.2.2 Arquivo Dados_ADA_03-2010_Rev02.mat
As amostras foram agrupadas no arquivo Dados_ADA_03-2010_Rev02.mat. Quando
aberto, este arquivo carrega no workspace sete vetores: Vp, Is_max_uso, It_max_uso, Ps, Qs,
Pt e Qt. Cada vetor possui 8677 linhas, o que corresponde a uma amostra de um mês com
medidas integralizadas de cinco em de cinco minutos.
Os vetores Is_max_uso e It_max_uso possuem os valores das correntes máximas
semanais dos enrolamentos secundário e terciário, respectivamente. Estas correntes servem
como base para a determinação do patamar de carga.
A figura 24 mostra o workspace com todos os vetores carregados para o correto
funcionamento do modelo simplificado do CUT.
Figura 24 - Workspace com todos os vetores do modelo .
simplificado do CUT . Fonte: Autoria própria. .
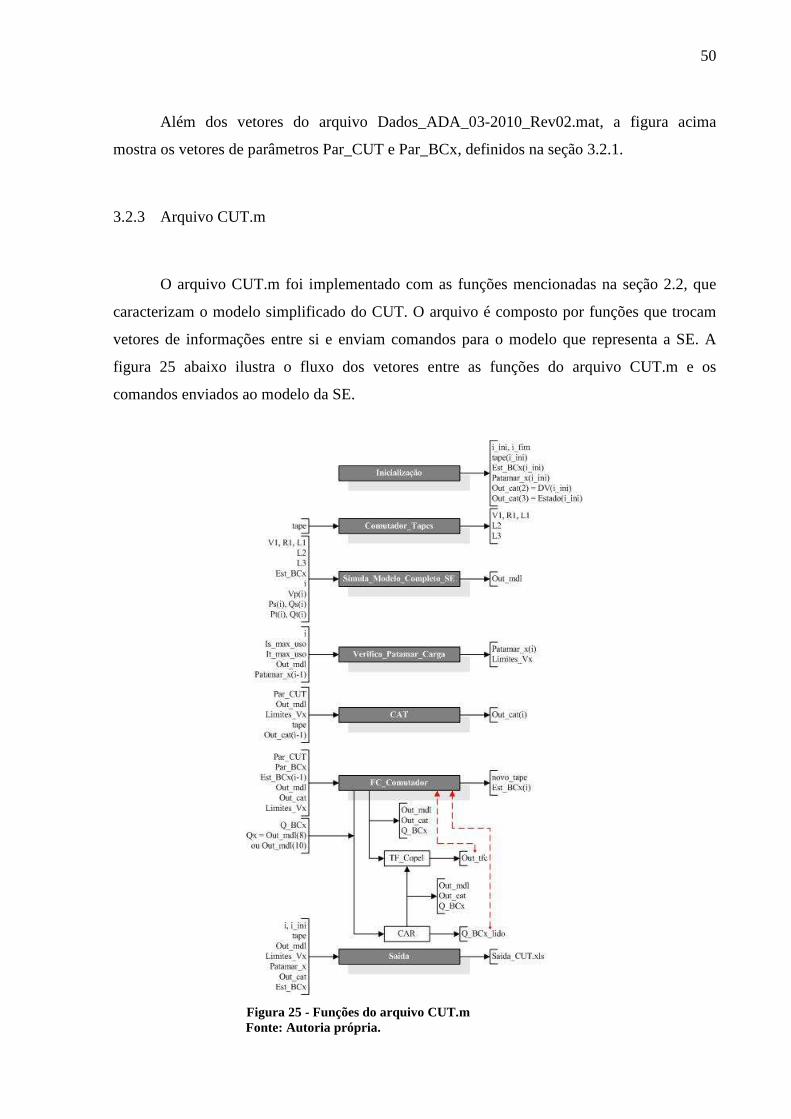
50
Além dos vetores do arquivo Dados_ADA_03-2010_Rev02.mat, a figura acima
mostra os vetores de parâmetros Par_CUT e Par_BCx, definidos na seção 3.2.1.
3.2.3 Arquivo CUT.m
O arquivo CUT.m foi implementado com as funções mencionadas na seção 2.2, que
caracterizam o modelo simplificado do CUT. O arquivo é composto por funções que trocam
vetores de informações entre si e enviam comandos para o modelo que representa a SE. A
figura 25 abaixo ilustra o fluxo dos vetores entre as funções do arquivo CUT.m e os
comandos enviados ao modelo da SE.
Figura 25 - Funções do arquivo CUT.m . Fonte: Autoria própria. .

51
Cada função da figura acima será detalhada nas seções que seguem.
O código completo do arquivo CUT.m consta no ANEXO C.
3.2.3.1 Inicialização do CUT.m
Cada vetor do bloco de inicialização é carregado com o valor para a amostra i_ini,
referente ao estado dos atuadores e as condições de tensão e carga. A listagem a seguir
descreve a função de cada vetor.
• i_ini: indica para o controlador a posição da amostra inicial nos vetores do arquivo
Dados_ADA_03-2010_Rev02.mat;
• i_fim: indica para o controlador a posição da amostra final nos vetores do arquivo
Dados_ADA_03-2010_Rev02.mat;
• tape(i_ini): indica para o controlador o tape da amostra inicial;
• Est_BCx(i_ini): indica para o controlador o estado dos bancos de capacitores da
amostra inicial;
• Patamar_x(i_ini): indica para o controlador o patamar de carga da amostra inicial;
• Out_cat(2) = DV(i_ini): indica para o controlador o desvio de tensão da amostra
inicial em relação à tensão de referência;
• Out_cat(3) = Estado(i_ini): indica para o controlador o estado da tensão da amostra
inicial em relação às faixas de referência. Os estados da tensão serão mais bem
detalhados na seção 3.2.3.5.
3.2.3.2 Função Comutador_Tapes
A função Comutador_Tapes é a responsável por prover a variação dos parâmetros
elétricos do transformador caso ocorra mudança no tape. No TF-1 o comutador de tapes
encontra-se no lado primário do transformador, fazendo variar os seguintes parâmetros:
• V1: tensão monofásica do enrolamento primário (fase-terra), em Volts;
• R1: resistência do enrolamento primário, em Ohms;
• L1: indutância do enrolamento primário, em Henries;
• L2: indutância do enrolamento secundário, em Henries;
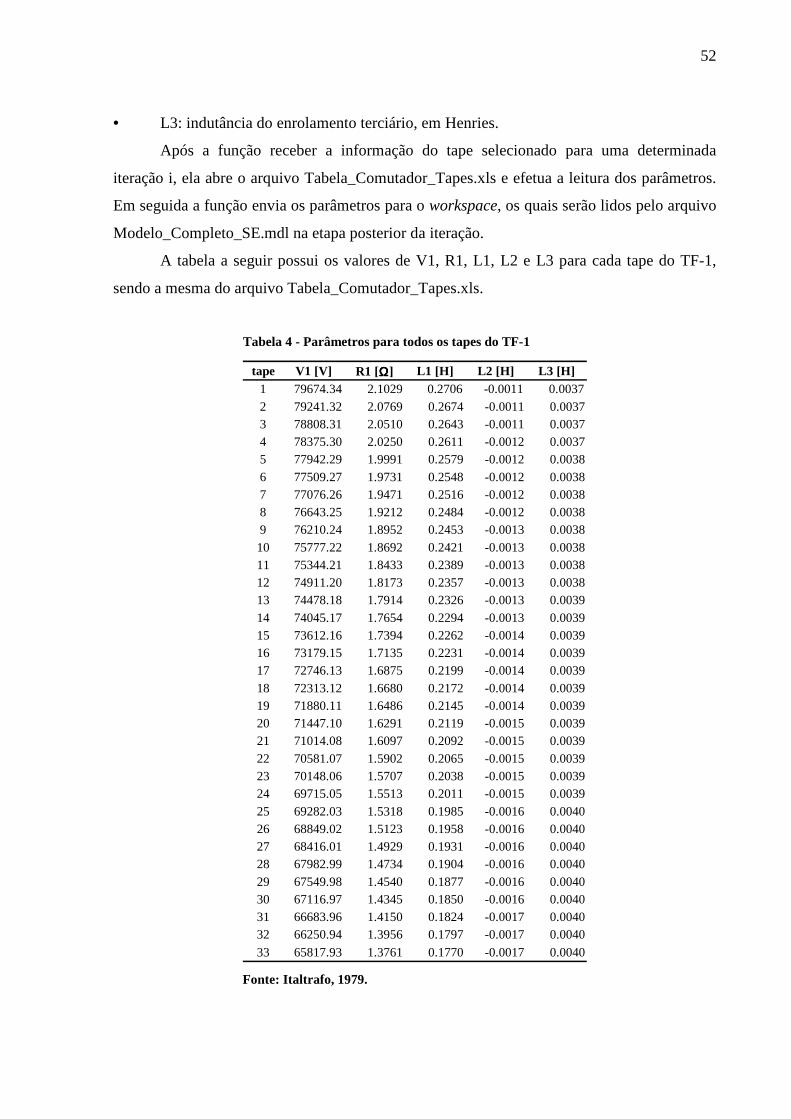
52
• L3: indutância do enrolamento terciário, em Henries.
Após a função receber a informação do tape selecionado para uma determinada
iteração i, ela abre o arquivo Tabela_Comutador_Tapes.xls e efetua a leitura dos parâmetros.
Em seguida a função envia os parâmetros para o workspace, os quais serão lidos pelo arquivo
Modelo_Completo_SE.mdl na etapa posterior da iteração.
A tabela a seguir possui os valores de V1, R1, L1, L2 e L3 para cada tape do TF-1,
sendo a mesma do arquivo Tabela_Comutador_Tapes.xls.
Tabela 4 - Parâmetros para todos os tapes do TF-1 .
tape V1 [V] R1 [ΩΩΩΩ] L1 [H] L2 [H] L3 [H]1 79674.34 2.1029 0.2706 -0.0011 0.00372 79241.32 2.0769 0.2674 -0.0011 0.00373 78808.31 2.0510 0.2643 -0.0011 0.00374 78375.30 2.0250 0.2611 -0.0012 0.00375 77942.29 1.9991 0.2579 -0.0012 0.00386 77509.27 1.9731 0.2548 -0.0012 0.00387 77076.26 1.9471 0.2516 -0.0012 0.00388 76643.25 1.9212 0.2484 -0.0012 0.00389 76210.24 1.8952 0.2453 -0.0013 0.003810 75777.22 1.8692 0.2421 -0.0013 0.003811 75344.21 1.8433 0.2389 -0.0013 0.003812 74911.20 1.8173 0.2357 -0.0013 0.003813 74478.18 1.7914 0.2326 -0.0013 0.003914 74045.17 1.7654 0.2294 -0.0013 0.003915 73612.16 1.7394 0.2262 -0.0014 0.003916 73179.15 1.7135 0.2231 -0.0014 0.003917 72746.13 1.6875 0.2199 -0.0014 0.003918 72313.12 1.6680 0.2172 -0.0014 0.003919 71880.11 1.6486 0.2145 -0.0014 0.003920 71447.10 1.6291 0.2119 -0.0015 0.003921 71014.08 1.6097 0.2092 -0.0015 0.003922 70581.07 1.5902 0.2065 -0.0015 0.003923 70148.06 1.5707 0.2038 -0.0015 0.003924 69715.05 1.5513 0.2011 -0.0015 0.003925 69282.03 1.5318 0.1985 -0.0016 0.004026 68849.02 1.5123 0.1958 -0.0016 0.004027 68416.01 1.4929 0.1931 -0.0016 0.004028 67982.99 1.4734 0.1904 -0.0016 0.004029 67549.98 1.4540 0.1877 -0.0016 0.004030 67116.97 1.4345 0.1850 -0.0016 0.004031 66683.96 1.4150 0.1824 -0.0017 0.004032 66250.94 1.3956 0.1797 -0.0017 0.0040
33 65817.93 1.3761 0.1770 -0.0017 0.0040 Fonte: Italtrafo, 1979. .

53
3.2.3.3 Função Simula_Modelo_Completo_SE
A função Simula_Modelo_Completo_SE é a responsável por iniciar a simulação do
arquivo Modelo_Completo_SE.mdl e por redirecionar os resultados obtidos para o
controlador.
Uma das partes do arquivo Modelo_Completo_SE.mdl corresponde ao modelo da SE
Andirá 138 kV apresentado na seção 3.1. Este modelo teve os parâmetros do TF-1 alterados
para a emulação do comutador de tapes, conforme mostra a figura 26 abaixo.
Figura 26 - Parâmetros do TF-1 utilizados no modelo.
simplificado do CUT . Fonte: The MathWorks, 2003, p. 5-208. .
Os parâmetros que variam segundo a mudança de tape foram substituídos pelas
variáveis V1, R1, L1, L2 e L3. Estas variáveis são atualizadas com os valores previamente
carregados no workspace para uma determinada iteração i, conforme preconiza a seção
anterior.
O vetor relacionado ao estado dos bancos de capacitores, Est_BCx, é atualizado
conforme o comando do controlador para uma determinada iteração i. O parâmetro variável
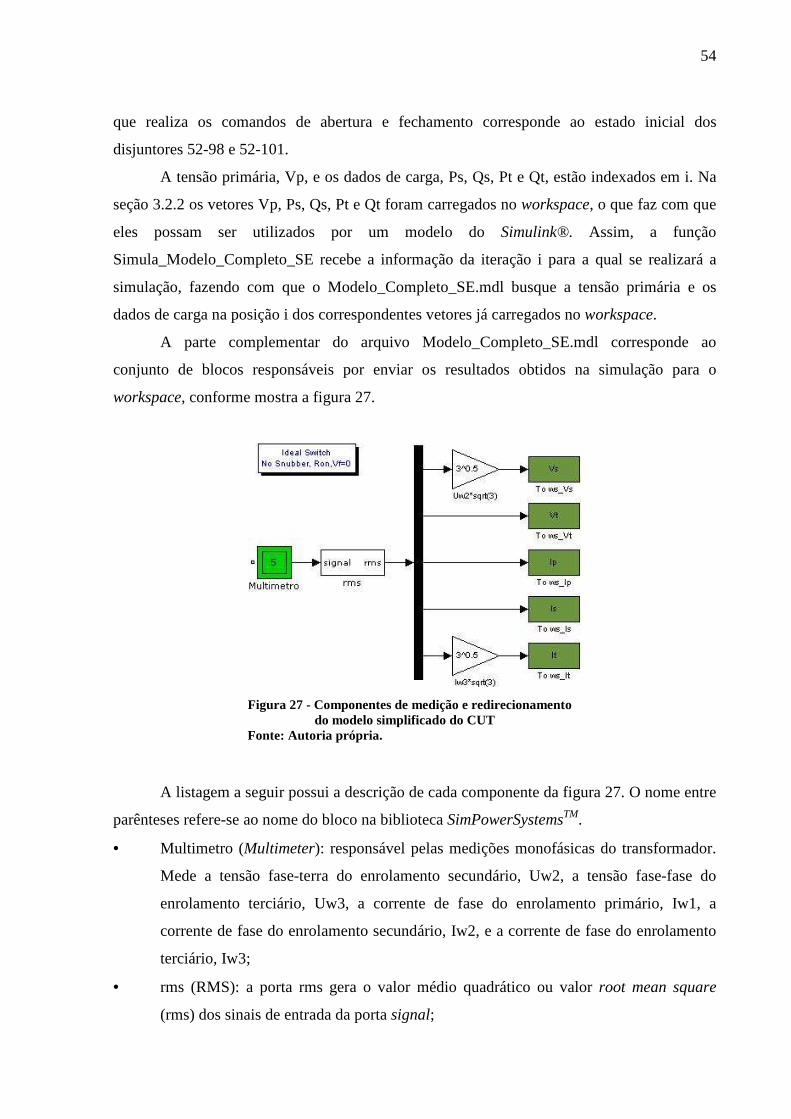
54
que realiza os comandos de abertura e fechamento corresponde ao estado inicial dos
disjuntores 52-98 e 52-101.
A tensão primária, Vp, e os dados de carga, Ps, Qs, Pt e Qt, estão indexados em i. Na
seção 3.2.2 os vetores Vp, Ps, Qs, Pt e Qt foram carregados no workspace, o que faz com que
eles possam ser utilizados por um modelo do Simulink®. Assim, a função
Simula_Modelo_Completo_SE recebe a informação da iteração i para a qual se realizará a
simulação, fazendo com que o Modelo_Completo_SE.mdl busque a tensão primária e os
dados de carga na posição i dos correspondentes vetores já carregados no workspace.
A parte complementar do arquivo Modelo_Completo_SE.mdl corresponde ao
conjunto de blocos responsáveis por enviar os resultados obtidos na simulação para o
workspace, conforme mostra a figura 27.
Figura 27 - Componentes de medição e redirecionamento .
do modelo simplificado do CUT . Fonte: Autoria própria. .
A listagem a seguir possui a descrição de cada componente da figura 27. O nome entre
parênteses refere-se ao nome do bloco na biblioteca SimPowerSystemsTM.
• Multimetro (Multimeter): responsável pelas medições monofásicas do transformador.
Mede a tensão fase-terra do enrolamento secundário, Uw2, a tensão fase-fase do
enrolamento terciário, Uw3, a corrente de fase do enrolamento primário, Iw1, a
corrente de fase do enrolamento secundário, Iw2, e a corrente de fase do enrolamento
terciário, Iw3;
• rms (RMS): a porta rms gera o valor médio quadrático ou valor root mean square
(rms) dos sinais de entrada da porta signal;
55
• Uw2*sqrt(3) (Gain): ganho de raiz de três, dado a tensão Uw2;
• Iw3*sqrt(3) (Gain): ganho de raiz de três, dado a corrente Iw3;
• Ideal Switch No Snubber, Ron, Vf=0 (Powergui): bloco que representa o ambiente de
parametrização da biblioteca SimPowerSystems.
O arquivo CUT.m utiliza medições trifásicas para a execução das lógicas de controle.
Assim, todas as medições monofásicas tomadas no TF-1 são convertidas para trifásicas e
posteriormente são enviadas ao workspace. As medições Uw3, Iw1 e Iw2 são enviadas ao
workspace com os nomes de Vt, Ip e Is, respectivamente. Após um ganho de raiz de três, as
medições Uw2 e Iw3 são enviadas ao workspace com os nomes de Vs e It, respectivamente.
No ANEXO A, na parte de análise do modelo simplificado do CUT, constam as
janelas de parâmetros de todos os blocos listados acima.
Os valores obtidos para uma determinada iteração i de Vs, Vt, Ip, Is, It, Vp(i), Ps(i),
Qs(i), Pt(i) e Qt(i) serão lidos do workspace e redirecionados ao vetor de saída Out_mdl.
3.2.3.4 Função Verifica_Patamar_Carga
A função Verifica_Patamar_Carga é a responsável por verificar o patamar em que a
carga se encontra e por enviar ao controlador os limites de tensão. O processo é realizado pela
interpretação das correntes obtidas na simulação do arquivo Modelo_Completo_SE.mdl.
Para uma determinada iteração i, a função efetua a leitura das correntes máximas
semanais, Is_max_uso e It_max_uso, na posição i dos correspondentes vetores carregados no
workspace (ver seção 3.2.2). Nesta mesma iteração i, a função adquire do vetor Out_mdl os
valores de Is e It. De posse destas correntes, a função utiliza a relação (2-20) da seção 2.2.3
para determinação das correntes percentuais de referência secundária e terciária, Is_ref e
It_ref. Abaixo segue a aplicação da relação (2-20) para o modelo simplificado do CUT.
.100.It_max_uso
ItIt_ref
.100;Is_max_uso
IsIs_ref
=
=
Após aplicação das fórmulas acima, os resultados obtidos são comparados as faixas de
corrente percentuais das tabelas do arquivo Tabela_Patamar_Carga.xls, reproduzidas abaixo.

56
Tabela 5 - Limites de tensão para a barra secundária .
Patamar Is_min Is_max Vs_fx_min Vs_fx_max Vs_bc_min Vs_bc_max Vs_bnc_min Vs_bnc_maxmin 1,00 3,00 33,60 34,00 32,80 36,20 13,10 14,50lev 2,00 78,00 33,60 34,00 32,80 36,20 13,10 14,50med 73,00 89,00 33,90 34,20 32,80 36,20 13,10 14,50
pes 85,00 100,00 34,10 34,50 32,80 36,20 13,10 14,50 Fonte: Copel, 2010. .
Tabela 6 - Limites de tensão para a barra terciária .
Patamar It_min It_max Vt_fx_min Vt_fx_max Vt_bc_min Vt_bc _max Vt_bnc_min Vt_bnc_maxmin 1,00 3,00 13,20 13,50 13,10 14,50 32,80 36,20lev 2,00 69,00 13,20 13,50 13,10 14,50 32,80 36,20med 64,00 81,00 13,45 13,65 13,10 14,50 32,80 36,20
pes 79,00 100,00 13,60 13,75 13,10 14,50 32,80 36,20 Fonte: Copel, 2010. .
Nas duas tabelas acima as tensões são expressas em kV.
O patamar de carga e os limites de tensão são estabelecidos conforme a faixa em que a
corrente de referência de cada enrolamento se encontra.
Para uma determinada iteração i, os patamares de carga do secundário e do terciário
são organizados no vetor Patamar_x(i). Os limites de tensão do secundário e do terciário são
organizados no vetor Limites_Vx.
O vetor Patamar_x(i-1) da iteração anterior é utilizado como entrada da função. Tal
medida é necessária para a implementação da histerese entre os patamares de carga, conforme
preconiza a seção 2.2.3.
3.2.3.5 Função CAT
A primeira etapa de execução da função é verificar qual barra foi parametrizada como
barra de referência. Nesta barra, para uma determinada iteração i, a função redireciona a
tensão obtida na simulação do arquivo Modelo_Completo_SE.mdl para a variável Vx. Os
limites de tensão desta barra, obtidos da função Verifica_Patamar_Carga na mesma iteração i,
são direcionados para as variáveis Vx_fx_min, Vx_fx_max, Vx_bc_min e Vx_bc_max.
De posse destes valores, tensão medida e tensões de referência, a função CAT realiza
fundamentalmente a mesma lógica do controlador automático citada no início da seção 2.2.2.
57
O controlador automático foi programado com o algoritmo de integração ∆V.∆T, descrito na
seção 2.2.2.1. Este algoritmo estabelece quatro estados para a tensão Vx em relação às tensões
de referência:
(1) Estado 0: Vx fora dos limites da barra controlada, ou seja, quando Vx é menor do que
Vx_bc_min ou maior do que Vx_bc_max. Neste estado, a operação de comutação de
tape é imediata. Quando Vx for menor do que Vx_bc_min, comuta-se imediatamente o
tape para cima. Quando Vx for maior do que Vx_bc_max, comuta-se imediatamente o
tape para baixo;
(2) Estado 2: Vx acima da faixa superior, ou seja, quando Vx é maior do que Vx_fx_max.
Neste estado, a operação de comutação de tape é temporizada conforme totalização do
algoritmo de integração ∆V.∆T. Enquanto Vx permanecer acima de Vx_fx_max, ∆V é
igual à Vx menos Vx_fx_max. Caso este estado permaneça até que o Σ∆V.∆T seja
igual ao limite parametrizado em 3.2.1, comuta-se o tape para baixo;
(3) Estado 3: Vx abaixo da faixa inferior, ou seja, quando Vx é menor do que Vx_fx_min.
Neste estado, a operação de comutação de tape também é temporizada conforme
totalização do algoritmo de integração ∆V.∆T. Enquanto Vx permanecer abaixo de
Vx_fx_min, ∆V é igual à Vx menos Vx_fx_min. Caso este estado permaneça até que o
Σ∆V.∆T seja igual ao valor oposto do limite parametrizado em 3.2.1, comuta-se o tape
para cima;
(4) Estado 1: Vx dentro dos limites de faixa, ou seja, quando Vx está entre Vx_fx_min e
Vx_fx_max. Neste estado, caso o Σ∆V.∆T(i-1) da iteração anterior seja diferente de
zero, ele será decrementado de ∆V.∆T(i) da iteração atual. Se o Σ∆V.∆T(i-1) for zero,
ele permanecerá zero.
Para uma determinada iteração i, o novo tape selecionado, o valor de ∆V.∆T(i) e o
estado de Vx são organizados no vetor Out_cat(i). O vetor Out_cat(i-1) da iteração anterior é
utilizado como entrada da função.

58
3.2.3.6 Função FC_Comutador
A função FC_Comutador é a responsável por verificar se o novo tape selecionado pelo
CAT, Out_cat(1), está numa posição válida. Entende-se por posição de tape válida, aquela que
não é maior que a máxima nem menor que a mínima. Caso uma destas posições ocorra, a
função poderá utilizar os bancos de capacitores disponíveis para colocar a tensão da barra de
referência dentro dos limites da faixa.
Portanto, são três situações verificadas pela função:
(1) O novo tape selecionado pelo CAT está acima da posição máxima (no TF-1, tape
maior do que 33): corresponde a uma subtensão sustentada com tape na posição
máxima e com o CAT enviando comando para subir o tape, no intuito de aumentar a
tensão. A função verifica o estado dos bancos de capacitores conectados na barra de
referência e caso haja bancos desligados, ela ligará um de cada vez na tentativa de
trazer a tensão para dentro dos limites da faixa. A função utiliza o algoritmo TF_Copel
para prever o efeito de cada comando de fechamento sobre a tensão da barra.
Conforme o resultado desta previsão, a função ganha alguma margem para descer o
tape;
(2) O novo tape selecionado pelo CAT está abaixo da posição mínima (no TF-1, tape
menor do que 1): corresponde a uma sobretensão sustentada com tape na posição
mínima e com o CAT enviando comando para descer o tape, no intuito de diminuir a
tensão. A função verifica o estado dos bancos de capacitores conectados na barra de
referência e caso haja bancos ligados, ela desligará um de cada vez na tentativa de
trazer a tensão para dentro dos limites da faixa. A função utiliza o algoritmo TF_Copel
para prever o efeito de cada comando de abertura sobre a tensão da barra. Conforme o
resultado desta previsão, a função ganha alguma margem para subir o tape;
(3) O novo tape selecionado pelo CAT está dentro da faixa válida de tape (no TF-1, tape
no intervalo fechado de 1 a 33): a função executa o algoritmo do CAR, o qual será
detalhado na seção 3.2.3.7.
Nas situações (1) e (2), para uma determinada iteração i, a verificação do estado dos
bancos de capacitores é realizada pela análise dos elementos do vetor Est_BCx(i-1), da
iteração anterior. Este vetor serve de entrada para a função, que sai com o vetor Est_BCx(i)
com os novos estados dos bancos após a análise.
59
Na função FC_Comutador, o algoritmo TF_Copel sempre será executado antes de uma
manobra de banco de capacitores. Os dados de entrada utilizados por este algoritmo são: o
vetor Out_mdl, o tape selecionado pelo CAT e a potência reativa total por barra da nova
configuração de bancos de capacitores que será testada, Q_BCx. O algoritmo realizará o
cálculo prévio das tensões de barra, considerando o tape sugerido pela função CAT e a nova
configuração de bancos.
Após uma manobra de banco, a função FC_Comutador calcula a nova posição do tape
da seguinte maneira: a tensão da barra de referência obtida da execução do algoritmo
TF_Copel, Vx_pu, é subtraída da tensão correspondente em Out_mdl, transformada em pu. O
módulo desta subtração, DV_BCx, é dividido pelo passo de tensão a cada comutação de tape,
Delta, apurado pelo algoritmo TF_Copel. O valor arredondado desta divisão corresponde à
margem de tape ganha para a configuração de bancos testada. Na situação (1), a nova posição
do tape será igual ao tape sugerido pelo CAT menos a margem ganha. Na situação (2), a nova
posição do tape será igual ao tape sugerido pelo CAT mais a margem ganha.
3.2.3.7 Algoritmo do CAR
O algoritmo do CAR pode ser executado dentro da função FC_Comutador quando o
novo tape selecionado pelo CAT estiver dentro da faixa válida de tape, conforme descreve a
situação (3) da seção anterior.
Para uma determinada iteração i, o algoritmo escreve no arquivo Tabela_CAR.xls a
potência reativa total por barra da atual configuração de bancos de capacitores, Q_BCx, e a
potência reativa da carga, Qx. Após a interpretação destes valores, o arquivo envia para o
algoritmo a potência reativa total por barra da nova configuração de bancos de capacitores,
Q_BCx_lido. De posse desta variável, o algoritmo verifica se houve alteração no setup dos
bancos de capacitores e caso ocorra uma mudança, ele executará o algoritmo TF_Copel.
Da mesma maneira que na função FC_Comutador, o algoritmo TF_Copel sempre será
executado pelo CAR antes de uma manobra de banco de capacitores. Aqui é aplicada a
mesma lógica de margem de tape descrita na seção anterior para as situações (1) e (2), de ligar
e desligar o banco, respectivamente.
Se a tensão obtida pela execução do algoritmo TF_Copel estiver fora da faixa, o novo
setup recomendado pelo CAR será desconsiderado.

60
O arquivo Tabela_CAR.xls possui a lógica de seleção da melhor configuração de
bancos de capacitores, conforme foi descrito na seção 2.2.4.1. Este arquivo consta no
ANEXO B e utiliza a mesma tabela reproduzida abaixo.
Tabela 7 - Combinações de bancos da SE Andirá 138 kV. .
Combinação de BC Entrada Saída0,00 0,00 0,002,40 1,44 0,96
4,80 3,84 3,36 Fonte: Copel, 2010. .
A tabela 7 possui todas as combinações possíveis de bancos de capacitores da SE
Andirá 138 kV. Os valores de potência reativa para a entrada e saída dos bancos de
capacitores foram ajustados para Hon = 60 % e Hoff = 40 %, respectivamente. Todos os
valores da tabela são expressos em Mvar.
3.2.3.8 Função Saída
A função Saída é a responsável por encaminhar os dados de cada iteração para o
arquivo Saída_CUT.xls, visando uma posterior etapa de análise.

61
4 ANÁLISE DOS RESULTADOS
Todas as simulações realizadas no Matlab/Simulink® utilizaram o solver ode23s
(stiff/Mod. Rosenbrock). Este solver apresentou melhor estabilidade quando foi comparado
aos outros disponíveis.
A duração de todas as simulações realizadas foi de um segundo.
4.1 RESULTADOS DO ENSAIO EM VAZIO
O módulo do ensaio em vazio da figura 21 foi submetido a um conjunto de simulações
visando à validação dos parâmetros do TF-1, apurados na seção 3.1.1.
Os seis valores de tensão V1ofn da tabela 2 foram atribuídos a fonte V1ofn em seis
simulações distintas. Para cada simulação, foram tomados os valores em vazio da corrente
primária de pico, I1o-pk, e da potência por fase, P’o. A tabela 8 abaixo apresenta um
comparativo entre os resultados obtidos nas simulações e os medidos no ensaio real de
laboratório.
Tabela 8 - Comparativo entre o ensaio em vazio simulado e o real .
Simulação V1ofn [V] I1o-pk_sim
[Apk]
I1o-pk_med
[Apk] Erro_I1 o-pk
P'o_sim
[W]
P'o_med
[W] Erro_P' o
0 0,00 0,00 0,00 0,00 % 0,00 0,00 0,00 %1 74154,87 0,54 0,51 6,61 % 9216,66 8542,00 7,90 %2 77572,78 0,68 0,68 0,40 % 10084,06 9697,00 3,99 %3 80205,50 0,86 0,86 0,38 % 10779,43 10796,33 0,16 %4 83600,32 1,20 1,21 0,76 % 11707,29 12609,00 7,15 %
5 87387,74 1,84 1,87 1,62 % 12781,61 15031,00 14,97 % Fonte: Autoria própria. .
Cada erro mostrado na tabela acima foi obtido pela relação entre a grandeza simulada
e a medida. O erro médio da corrente primária de pico em vazio corresponde a 1,63 % e o erro
médio da potência ativa por fase em vazio corresponde a 5,69 %, com desvio padrão
relativamente alto.

62
Os erros obtidos devem-se ao fato de que para as seis simulações realizadas foi
considerado um valor fixo de resistência que representa as perdas no núcleo, Rm. Este valor na
prática é variável, ou seja, para diferentes tensões aplicadas em vazio existem diferentes
valores de Rm, uma vez que a área no interior da curva de histerese é levemente alterada.
Os erros encontrados nos parâmetros do Grupo B do TF-1 não têm um efeito relevante
nos resultados finais, pois o circuito série do transformador é o maior responsável pela
regulação de tensão.
A figura 28 abaixo mostra uma análise comparativa entre as curvas de saturação
simulada e medida.
Figura 28 - Gráfico comparativo das curvas de saturação simulada e medida . Fonte: Autoria própria. .
Nas duas curvas da figura acima, os valores de I1o-pk foram retirados da tabela 8 e os
de φpm da tabela 3. Os valores de φpm são os mesmos para as duas curvas, pois φpm depende
somente de V1ofn que foi a mesma tensão aplicada nos ensaios simulado e real.
63
4.2 RESULTADO DA VALIDAÇÃO DO MODELO DA SE ANDIRÁ 138 kV
A validação do modelo da SE Andirá 138 kV foi realizada pela comparação entre as
tensões secundárias e terciárias verificadas em campo e as simuladas. Para tanto, houve a
necessidade de preparar uma amostra com os dados brutos de campo e submetê-la ao modelo
da SE. Esta amostra foi compilada no arquivo Dados_ADA_03-2010_Rev01.mat, conforme
descreve a próxima seção.
4.2.1 Arquivo Dados_ADA_03-2010_Rev01.mat
As amostras para validação do modelo da SE foram agrupadas no arquivo
Dados_ADA_03-2010_Rev01.mat. Quando aberto, este arquivo carrega no workspace treze
vetores: Vp, Ps, Qs, Pt, Qt, Q_BCs, BC_1A, BC_1B, V1, R1, L1, L2 e L3. Cada vetor possui
8677 linhas, o que corresponde a uma amostra de um mês com medidas integralizadas de
cinco em de cinco minutos.
A listagem abaixo possui a descrição de cada vetor.
• Vp, Ps, Qs, Pt e Qt: correspondem aos mesmos vetores utilizados pelo modelo
simplificado do CUT na seção 3.2.2;
• Q_BCs: vetor com a potência reativa de cada banco de capacitores;
• BC_1A e BC_1B: vetores de estado dos disjuntores 52-98 e 52-101, respectivamente;
• V1, R1, L1, L2 e L3: vetores de parâmetros do TF-1 para uma determinada posição de
tape.
A figura 29 abaixo mostra o workspace com todos os vetores carregados para
validação do modelo da SE.

64
Figura 29 - Workspace com todos os vetores para validação do .
modelo da SE Andirá 138 kV . Fonte: Autoria própria. .
4.2.2 Análise e Resultados
Os principais parâmetros dos blocos da figura 17 foram indexados em i, conforme
mostra o ANEXO A na parte de validação do modelo da SE. Para cada iteração i, um
conjunto de valores de Vp, Ps, Qs, Pt, Qt, Q_BCs, BC_1A, BC_1B, V1, R1, L1, L2 e L3 foi
utilizado pelo modelo e as tensões secundárias e terciárias obtidas foram armazenadas.
O gráfico abaixo traz a curva da tensão secundária obtida nas primeiras 500 iterações
com a correspondente curva das tensões secundárias verificadas em campo.
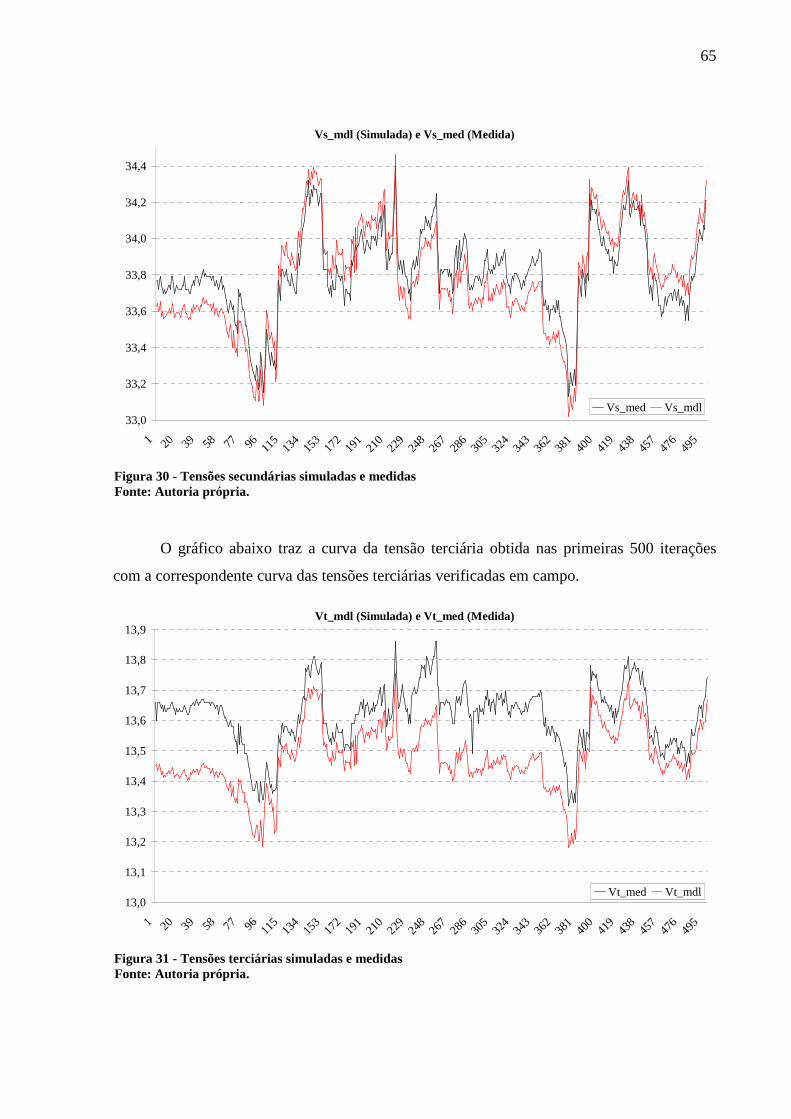
65
Vs_mdl (Simulada) e Vs_med (Medida)
33,0
33,2
33,4
33,6
33,8
34,0
34,2
34,4
1 20 39 58 77 96 115
134
153
172
191
210
229
248
267
286
305
324
343
362
381
400
419
438
457
476
495
Vs_med Vs_mdl
Figura 30 - Tensões secundárias simuladas e medidas . Fonte: Autoria própria. .
O gráfico abaixo traz a curva da tensão terciária obtida nas primeiras 500 iterações
com a correspondente curva das tensões terciárias verificadas em campo.
Vt_mdl (Simulada) e Vt_med (Medida)
13,0
13,1
13,2
13,3
13,4
13,5
13,6
13,7
13,8
13,9
1 20 39 58 77 96 115
134
153
172
191
210
229
248
267
286
305
324
343
362
381
400
419
438
457
476
495
Vt_med Vt_mdl
Figura 31 - Tensões terciárias simuladas e medidas . Fonte: Autoria própria. .
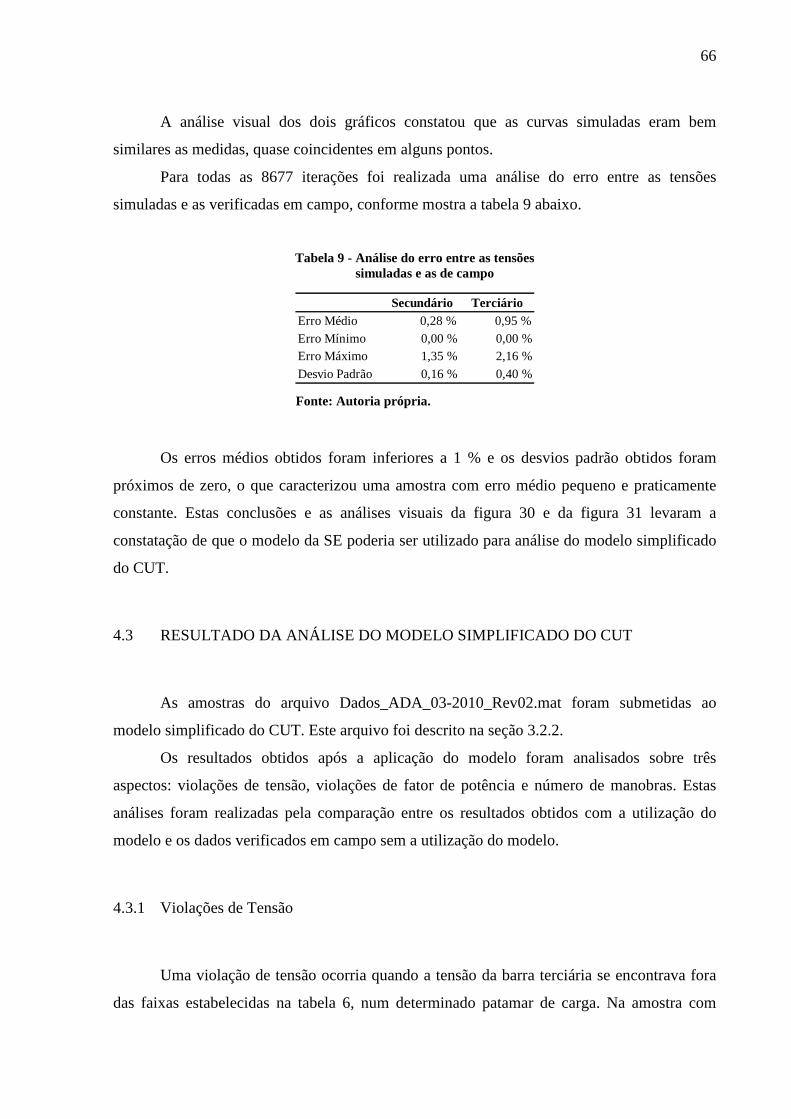
66
A análise visual dos dois gráficos constatou que as curvas simuladas eram bem
similares as medidas, quase coincidentes em alguns pontos.
Para todas as 8677 iterações foi realizada uma análise do erro entre as tensões
simuladas e as verificadas em campo, conforme mostra a tabela 9 abaixo.
Tabela 9 - Análise do erro entre as tensões simuladas e as de campo
Secundário TerciárioErro Médio 0,28 % 0,95 %Erro Mínimo 0,00 % 0,00 %Erro Máximo 1,35 % 2,16 %
Desvio Padrão 0,16 % 0,40 % Fonte: Autoria própria. .
Os erros médios obtidos foram inferiores a 1 % e os desvios padrão obtidos foram
próximos de zero, o que caracterizou uma amostra com erro médio pequeno e praticamente
constante. Estas conclusões e as análises visuais da figura 30 e da figura 31 levaram a
constatação de que o modelo da SE poderia ser utilizado para análise do modelo simplificado
do CUT.
4.3 RESULTADO DA ANÁLISE DO MODELO SIMPLIFICADO DO CUT
As amostras do arquivo Dados_ADA_03-2010_Rev02.mat foram submetidas ao
modelo simplificado do CUT. Este arquivo foi descrito na seção 3.2.2.
Os resultados obtidos após a aplicação do modelo foram analisados sobre três
aspectos: violações de tensão, violações de fator de potência e número de manobras. Estas
análises foram realizadas pela comparação entre os resultados obtidos com a utilização do
modelo e os dados verificados em campo sem a utilização do modelo.
4.3.1 Violações de Tensão
Uma violação de tensão ocorria quando a tensão da barra terciária se encontrava fora
das faixas estabelecidas na tabela 6, num determinado patamar de carga. Na amostra com
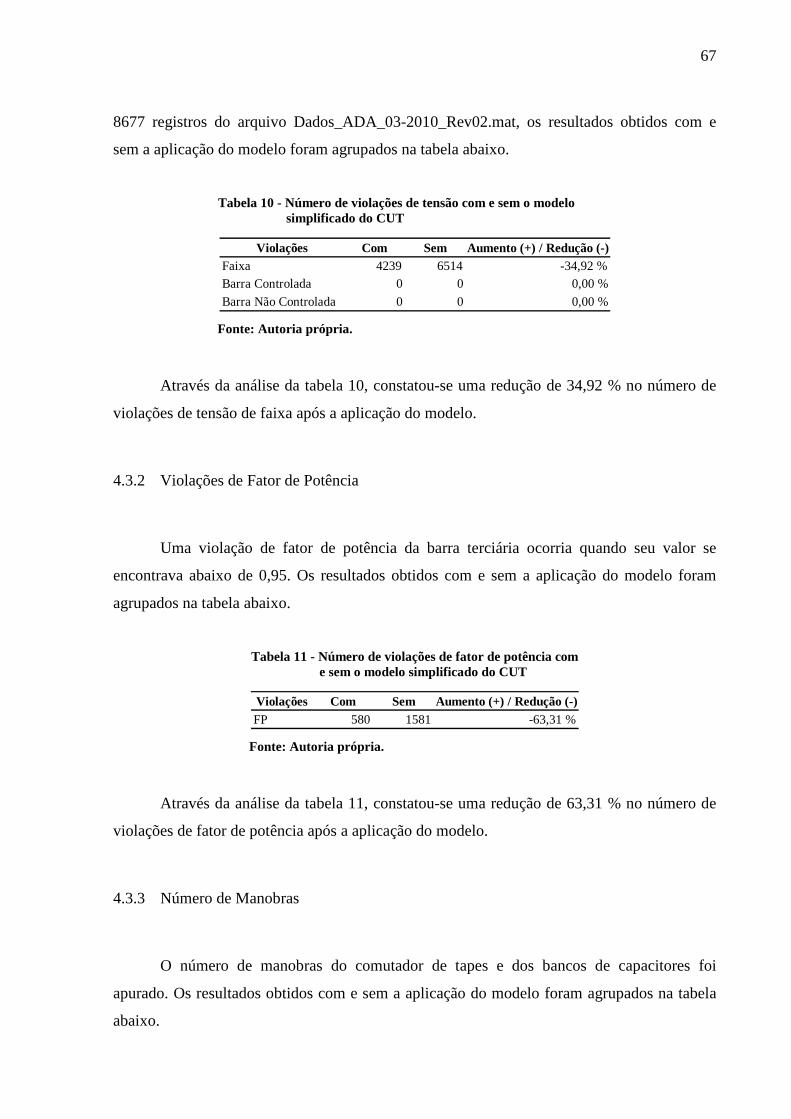
67
8677 registros do arquivo Dados_ADA_03-2010_Rev02.mat, os resultados obtidos com e
sem a aplicação do modelo foram agrupados na tabela abaixo.
Tabela 10 - Número de violações de tensão com e sem o modelo . simplificado do CUT
Violações Com Sem Aumento (+) / Redução (-)Faixa 4239 6514 -34,92 %Barra Controlada 0 0 0,00 %
Barra Não Controlada 0 0 0,00 % Fonte: Autoria própria. .
Através da análise da tabela 10, constatou-se uma redução de 34,92 % no número de
violações de tensão de faixa após a aplicação do modelo.
4.3.2 Violações de Fator de Potência
Uma violação de fator de potência da barra terciária ocorria quando seu valor se
encontrava abaixo de 0,95. Os resultados obtidos com e sem a aplicação do modelo foram
agrupados na tabela abaixo.
Tabela 11 - Número de violações de fator de potência com e sem o modelo simplificado do CUT
Violações Com Sem Aumento (+) / Redução (-)FP 580 1581 -63,31 %
Fonte: Autoria própria. .
Através da análise da tabela 11, constatou-se uma redução de 63,31 % no número de
violações de fator de potência após a aplicação do modelo.
4.3.3 Número de Manobras
O número de manobras do comutador de tapes e dos bancos de capacitores foi
apurado. Os resultados obtidos com e sem a aplicação do modelo foram agrupados na tabela
abaixo.
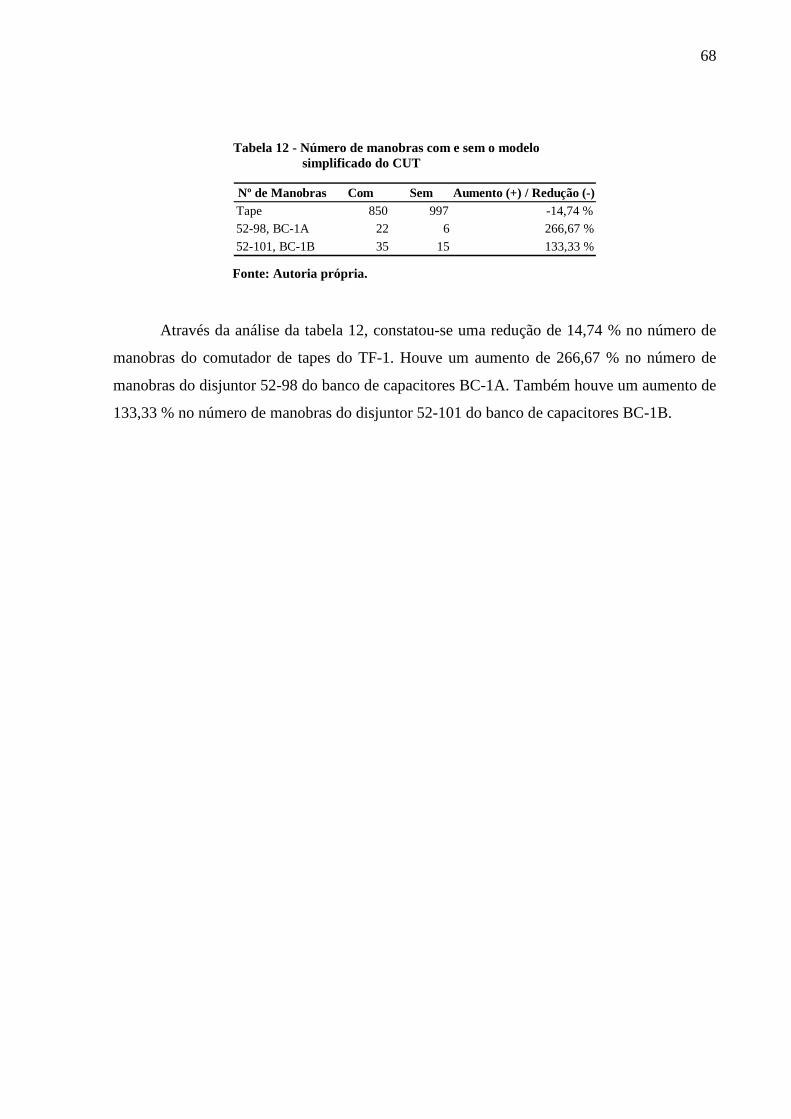
68
Tabela 12 - Número de manobras com e sem o modelo . simplificado do CUT .
Nº de Manobras Com Sem Aumento (+) / Redução (-)Tape 850 997 -14,74 %52-98, BC-1A 22 6 266,67 %
52-101, BC-1B 35 15 133,33 % Fonte: Autoria própria. .
Através da análise da tabela 12, constatou-se uma redução de 14,74 % no número de
manobras do comutador de tapes do TF-1. Houve um aumento de 266,67 % no número de
manobras do disjuntor 52-98 do banco de capacitores BC-1A. Também houve um aumento de
133,33 % no número de manobras do disjuntor 52-101 do banco de capacitores BC-1B.

69
5 CONCLUSÕES E PROPOSTAS FUTURAS
5.1 CONCLUSÕES
Os resultados do ensaio em vazio e da validação do modelo da SE Andirá 138 kV
mostraram que o TF-1 foi modelado de maneira adequada para a realização de uma análise de
desempenho do CUT. Outra conclusão importante refere-se à comprovação de que os dados
do relatório de ensaios do TF-1 ainda podem ser utilizados, uma vez que este equipamento
tem quase 30 anos de operação com pelo menos um deslocamento de uma subestação para
outra. O tempo de operação do equipamento aliado a eventuais danos no seu transporte
poderiam afetar algum parâmetro construtivo do equipamento. Esta hipótese foi descartada,
pois o equipamento foi modelado com os mesmos dados do relatório de ensaios de 1979 e os
resultados obtidos foram satisfatórios.
Os resultados apresentados na parte de análise do modelo simplificado do CUT
mostraram uma significativa melhoria nos perfis de tensão e fator de potência. As reduções de
34,92 % no número de violações de tensão de faixa e de 63,31 % no número de violações de
fator de potência comprovaram a eficácia do controlador.
Vale ressaltar que na simulação do número de manobras dos bancos de capacitores
aumentou significativamente, 266,67 % para BC-1A e 133,33 % para BC-1B. Estes resultados
vieram a corroborar com as expectativas das equipes de automação e manutenção da Copel. A
importante conclusão que se tira destes números é que na subestação em que se deseja levar a
função elétrica CUT, a operação dos bancos de capacitores poderá aumentar
significativamente. Estes valores também reforçaram a necessidade de troca de algumas
chaves de bancos de capacitores presentes nas instalações da companhia, as quais já se
encontram obsoletas e com corriqueiras falhas. Entretanto, houve uma redução inesperada de
14,74 % no número de manobras do comutador de tapes do TF-1, o que é bom para estender a
sua vida útil.
Os parâmetros utilizados na análise de desempenho do modelo simplificado do CUT
foram os mesmos arbitrados pela Copel no processo de homologação da função elétrica.
Assim, o resultado que foi apresentado pelo uso do controlador poderia ser melhorado em
determinados aspectos mediante a sintonia dos parâmetros do controlador.
70
Os mesmos processos de modelagem do TF-1, de validação do modelo da SE Andirá
138 kV e de aplicação e análise do modelo simplificado do CUT poderão ser utilizados em
subestações com as mesmas características da SE Andirá 138 kV. Tais características foram
definidas no início da seção 3.1.
5.2 PROPOSTAS FUTURAS
A listagem a seguir possui uma relação das propostas futuras que poderão ser
desenvolvidas como continuidade do presente trabalho.
• Sintonia dos parâmetros do CUT visando à melhoria nos perfis de tensão, fator de
potência ou número de manobras dos atuadores;
• Análise do modelo da SE Andirá 138 kV em paralelo com o sistema de automação da
Copel;
• Análise do comportamento do controlador mediante aplicação de distúrbios, tais
como: curto-circuito, sobrecarga, surtos de manobra, entre outros;
• Análise do comportamento do controlador com um acessante de geração conectado na
barra de 13,8 kV ou 34,5 kV;
• Análise da utilização do CUT em SEs de 34,5 / 13,8 kV com bancos reguladores de
tensão e bancos de capacitores;
• Estudo relacionado ao ganho financeiro resultante da utilização do CUT.

71
REFERÊNCIAS
AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA. Procedimentos de Distribuição de Energia Elétrica no Sistema Elétrico Nacional – PRODIST: módulo 8 – qualidade da energia elétrica. Brasília, 2010.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 5356-1: transformadores de potência: parte 1: generalidades. Rio de Janeiro, 2007.
COMPANHIA PARANAENSE DE ENERGIA. DPPR - 38/2009: estudo de compensação reativa nas barras de conexão à rede básica das subestações localizadas na região norte e noroeste do Paraná. Curitiba, 2009.
______. SASE - Sistema de Automação de Subestações: manual do operador: versão 6.2.2.0. Curitiba, 2009. 71 p.
______. SASE - Sistema de Automação de Subestações: topologia: manual de configuração e referência: versão 6.3.0.0. Curitiba, 2009. 372 p.
ITALTRAFO. Certificato di Collaudo: transformer test report. Nápoles, Campânia, 1979.
KOSOW, Irving Lionel. Máquinas Elétricas e Transformadores. 4ª ed. Porto Alegre: Editora Globo, 1982.
MOROZINI JÚNIOR, Edson Marcos. Simulação do Controle Automático de Tensão em Barras de Carga de Subestações da Copel Utilizando o Matlab/Simulink® . 2005. 122 f. Monografia (Pós-Graduação em Automação de Processos Industriais) – Departamento Acadêmico de Eletrônica, Centro Federal de Educação Tecnológica do Paraná, Curitiba, 2005.
OGATA, Katsuhiko. Engenharia de Controle Moderno. 3ª ed. Rio de Janeiro: Editora LTC, 1998.
OPERADOR NACIONAL DO SISTEMA ELÉTRICO. Submódulo 3.6: requisitos técnicos mínimos para a conexão à rede básica. Rio de Janeiro, 2008.
SIMONE, Gilio Aluisio. Transformadores: teoria e exercícios. 1ª ed. São Paulo: Editora Érica, 1998.
THE MATHWORKS. SimPowerSystems: user’s guide: version 3. Natick, MA, 2003.
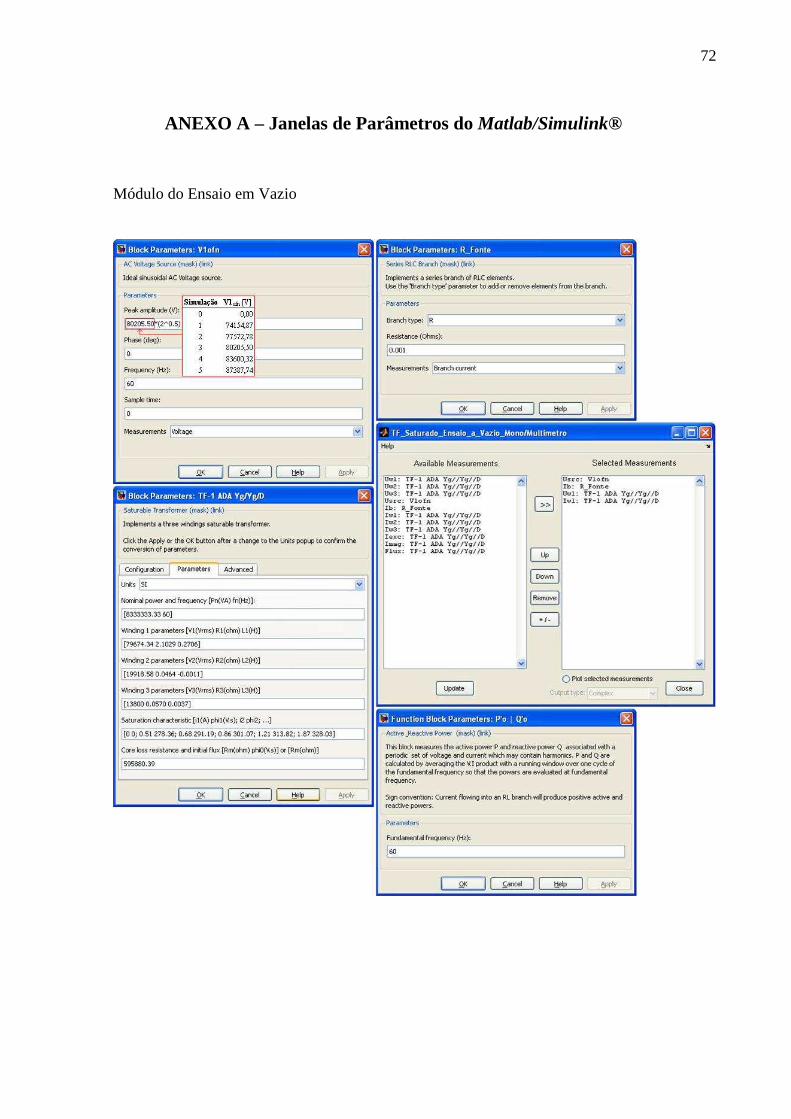
72
ANEXO A – Janelas de Parâmetros do Matlab/Simulink®
Módulo do Ensaio em Vazio
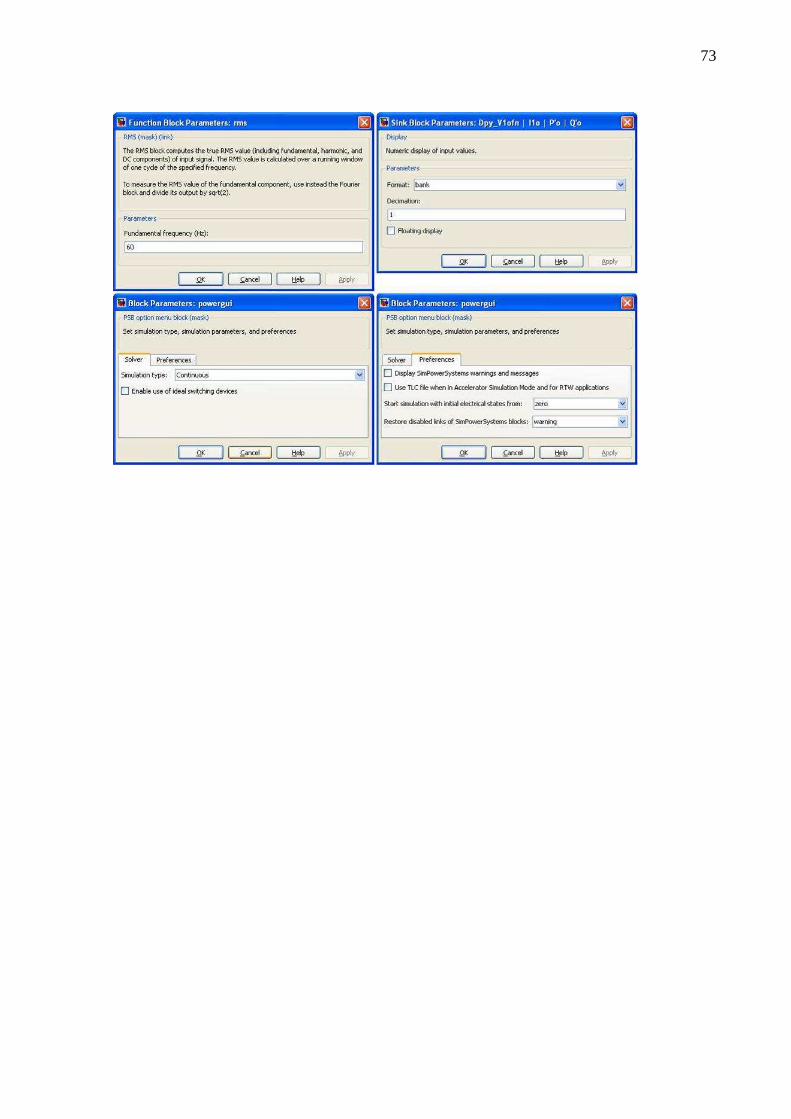
73
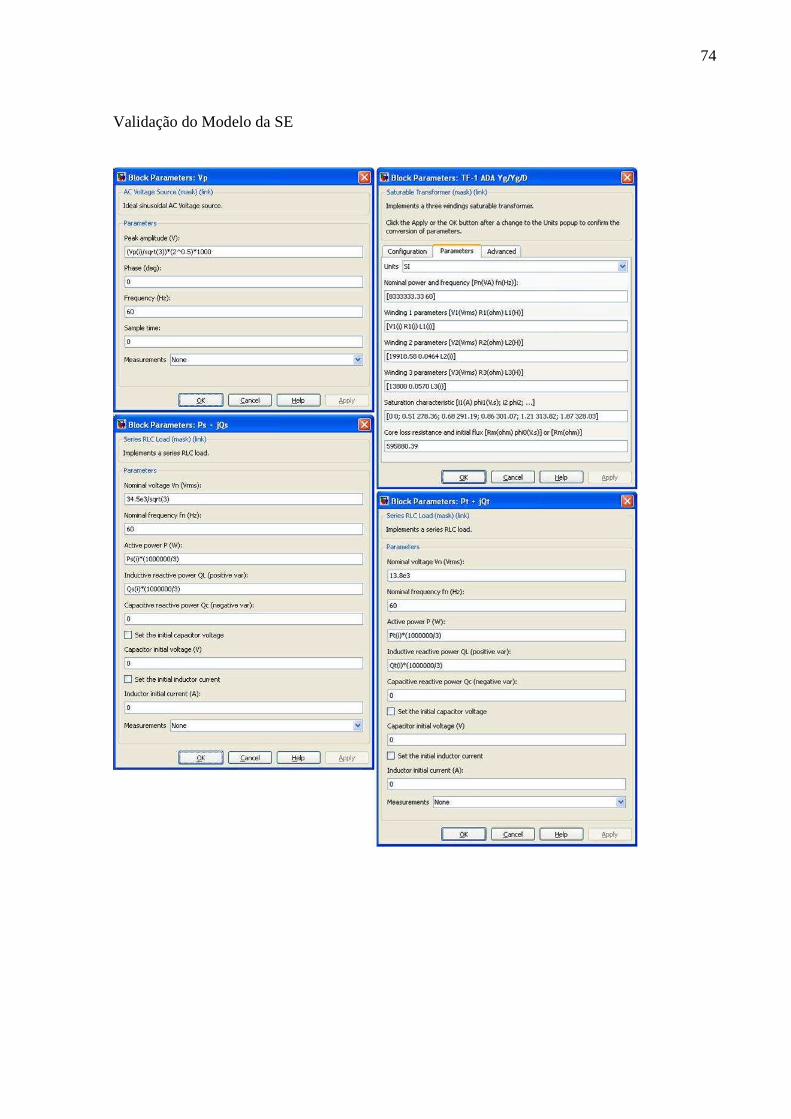
74
Validação do Modelo da SE
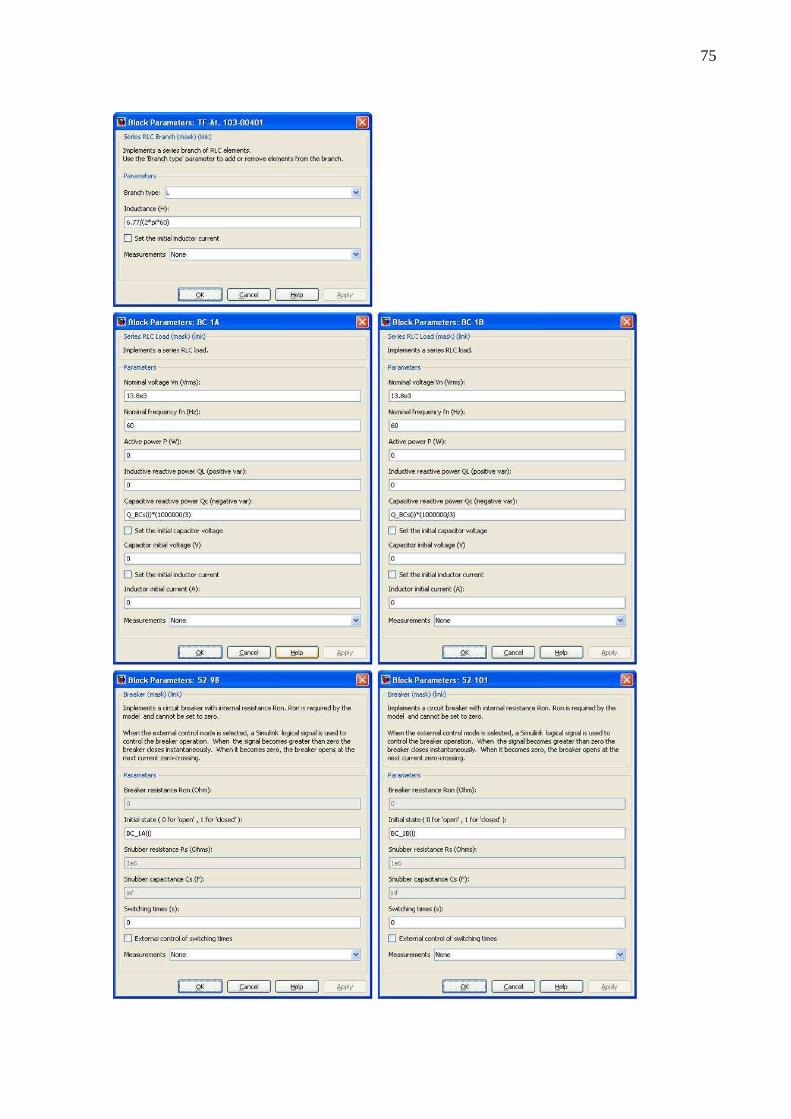
75

76
Parâmetros do Modelo Simplificado do CUT

77

78
Análise do Modelo Simplificado do CUT
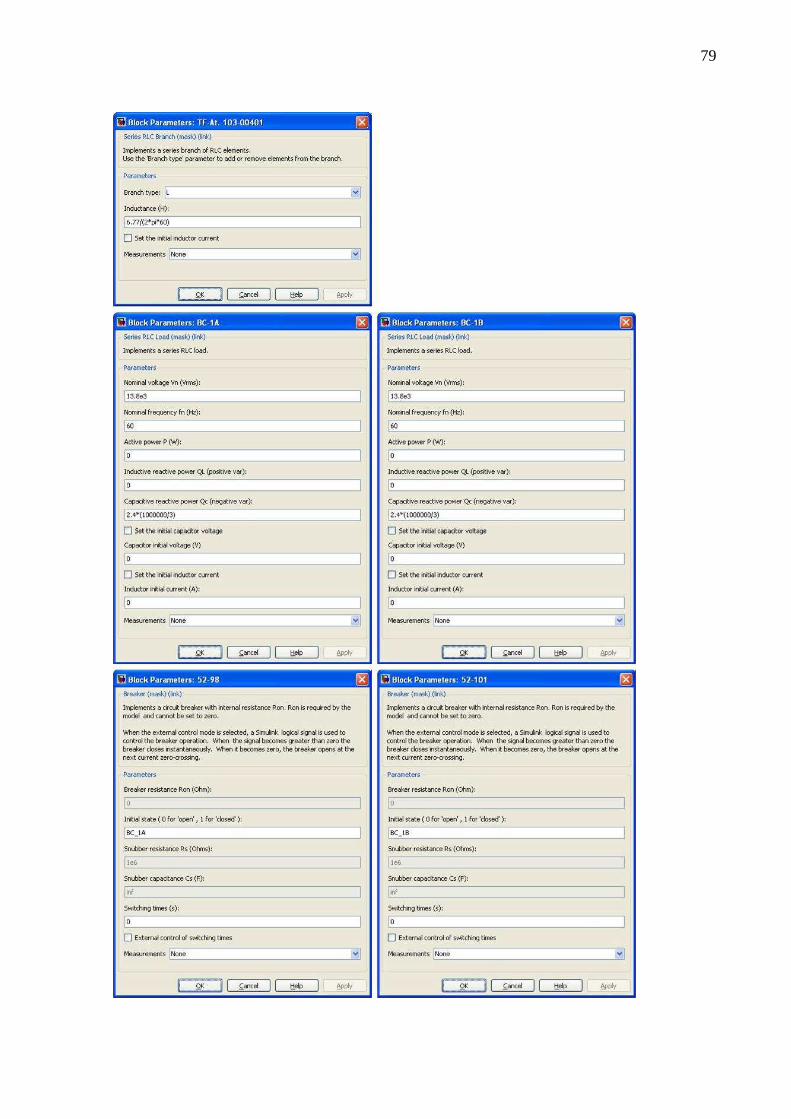
79

80

81
ANEXO B – Arquivo Tabela_CAR.xls

82
ANEXO C – Arquivo CUT.m
function CUT(i_ini,i_fim) Apl_xls=actxserver('Excel.Application'); Apl_xls.Visible=1; %Declaração da variável global global Par_CUT i %Aquisição dos parâmetros do CUT Par_CUT=evalin('base','Par_CUT'); for i=i_ini:1:i_fim assignin('base','i',i); fprintf('Iteração: %d\n',i); %Dados para a primeira iteração if i==i_ini %Inicializa as variáveis, para i_ini=1 tape=1; BC_1A=1; %Ligado BC_1B=0; %Desligado Est_BCx=[BC_1A;BC_1B]; assignin('base','BC_1A',~BC_1A); assignin('base','BC_1B',~BC_1B); Patamar_x='lev','lev'; Out_cat(2)=0; %DV Out_cat(3)=1; %Estado xlswrite('Tabela_CAR',0,'Plan1','B2'); %Q_BCx_(t) xlswrite('Tabela_CAR',0,'Plan1','B3'); %Qx_mdl_(t) end %Chama as funções Comutador_Tapes(tape); [Out_mdl]=Simula_Modelo_Completo_SE(i); [Limites_Vx,Patamar_x]=Verifica_Patamar_Carga(Out_mdl,Patamar_x); [Out_cat]=CAT(tape,Out_mdl,Limites_Vx,Out_cat); [novo_tape,Est_BCx]=FC_Comutador(Out_mdl,Out_cat,Limites_Vx,Est_BCx); %Tratar comandos if novo_tape < 1 fprintf('Tape calculado inválido: %d\n',novo_tape); novo_tape=1; elseif novo_tape > 33 fprintf('Tape calculado inválido: %d\n',novo_tape); novo_tape=33; end tape=novo_tape; BC_1A=Est_BCx(1); BC_1B=Est_BCx(2); %Inverte o bit de estado da chave de cada banco de capacitores %para a simulação no modelo completo assignin('base','BC_1A',~BC_1A); assignin('base','BC_1B',~BC_1B); Saida(i,i_ini,tape,Out_mdl,Limites_Vx,Patamar_x,Out_cat,Est_BCx); end disp('Concluído!'); end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % FUNÇÃO DO COMUTADOR DE TAPES % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function Comutador_Tapes(tape) assignin('base','V1',xlsread('Tabela_Comutador_Tapes','Plan1',strcat('B',num2str(tape)))); assignin('base','R1',xlsread('Tabela_Comutador_Tapes','Plan1',strcat('C',num2str(tape)))); assignin('base','L1',xlsread('Tabela_Comutador_Tapes','Plan1',strcat('D',num2str(tape)))); assignin('base','L2',xlsread('Tabela_Comutador_Tapes','Plan1',strcat('E',num2str(tape)))); assignin('base','L3',xlsread('Tabela_Comutador_Tapes','Plan1',strcat('F',num2str(tape)))); end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % FUNÇÃO PARA SIMULAR O MODELO COMPLETO % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%

83
function [Out_mdl]=Simula_Modelo_Completo_SE(i) %Zera o 'trigger' assignin('base','I_trigger',0); %Simula o modelo da SE ADA set_param('Modelo_Completo_SE','SimulationCommand','start'); while(1) if evalin('base','I_trigger')>0 break end pause(1) %Tempo necessário para o 'while(1)...' esperar a simulação %do modelo da SE ADA end %Transfere os dados obtidos da simulação para as variáveis '...mdl' Ip_mdl=evalin('base','Ip'); Is_mdl=evalin('base','Is'); It_mdl=evalin('base','It'); Vs_mdl=evalin('base','Vs')/1000; Vt_mdl=evalin('base','Vt')/1000; %Traz as medições de tensão primária e de carregamento para o CUT Vp=evalin('base','Vp(i)'); Ps=evalin('base','Ps(i)'); Qs=evalin('base','Qs(i)'); Pt=evalin('base','Pt(i)'); Qt=evalin('base','Qt(i)'); %Monta a matriz de saída Out_mdl=[Ip_mdl Is_mdl It_mdl Vs_mdl Vt_mdl Vp Ps Qs Pt Qt]; end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % FUNÇÃO PARA VERIFICAR O PATAMAR DE CARGA % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [Limites_Vx,Patamar_x]=Verifica_Patamar_Carga(Out_mdl,Patamar_x) %Cálcula as correntes de referência para o levantamento do patamar de carga Is_ref=Out_mdl(2)/evalin('base','Is_max_uso(i,1)')*100; It_ref=Out_mdl(3)/evalin('base','It_max_uso(i,1)')*100; patamar_s=Patamar_x(1); patamar_t=Patamar_x(2); %Verifica o patamar de carga para a barra de 34,5 kV for s=3:1:9 Is_ref_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('L',num2str(s))); Is_ref_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('M',num2str(s))); if Is_ref >= Is_ref_min && Is_ref < Is_ref_max switch s case 3 patamar_s='min'; break case 4 if strcmp(patamar_s,'min')==1 patamar_s ='min'; break elseif strcmp(patamar_s,'lev')==1 patamar_s='lev'; break else patamar_s='lev'; break end case 5 patamar_s='lev'; break case 6 if strcmp(patamar_s,'lev')==1 patamar_s='lev'; break elseif strcmp(patamar_s,'med')==1 patamar_s='med'; break else patamar_s='med'; break end case 7 patamar_s='med'; break case 8 if strcmp(patamar_s,'med')==1

84
patamar_s='med'; break elseif strcmp(patamar_s,'pes')==1 patamar_s='pes'; break else patamar_s='pes'; break end end end if s==9 && Is_ref >= Is_ref_min; patamar_s='pes'; break end end %Verifica o patamar de carga para a barra de 13,8 kV for t=12:1:18 It_ref_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('L',num2str(t))); It_ref_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('M',num2str(t))); if It_ref >= It_ref_min && It_ref < It_ref_max switch t case 12 patamar_t='min'; break case 13 if strcmp(patamar_t,'min')==1 patamar_t ='min'; break elseif strcmp(patamar_t,'lev')==1 patamar_t='lev'; break else patamar_t='lev'; break end case 14 patamar_t='lev'; break case 15 if strcmp(patamar_t,'lev')==1 patamar_t='lev'; break elseif strcmp(patamar_t,'med')==1 patamar_t='med'; break else patamar_t='med'; break end case 16 patamar_t='med'; break case 17 if strcmp(patamar_t,'med')==1 patamar_t='med'; break elseif strcmp(patamar_t,'pes')==1 patamar_t='pes'; break else patamar_t='pes'; break end end end if t==18 && It_ref >= It_ref_min; patamar_t='pes'; break end end %Atribui para as variáveis os limites de tensão do patamar de carga selecionado %Limites para a barra de 34,5 kV switch patamar_s case 'min' p=3;

85
case 'lev' p=4; case 'med' p=5; case 'pes' p=6; end Vs_fx_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('D',num2str(p))); Vs_fx_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('E',num2str(p))); Vs_bc_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('F',num2str(p))); Vs_bc_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('G',num2str(p))); Vs_bnc_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('H',num2str(p))); Vs_bnc_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('I',num2str(p))); %Limites para a barra de 13,8 kV switch patamar_t case 'min' q=12; case 'lev' q=13; case 'med' q=14; case 'pes' q=15; end Vt_fx_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('D',num2str(q))); Vt_fx_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('E',num2str(q))); Vt_bc_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('F',num2str(q))); Vt_bc_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('G',num2str(q))); Vt_bnc_min=xlsread('Tabela_Patamar_Carga','Plan1',strcat('H',num2str(q))); Vt_bnc_max=xlsread('Tabela_Patamar_Carga','Plan1',strcat('I',num2str(q))); %Retorno da função Limites_Vx=[Vs_fx_min Vs_fx_max Vs_bc_min Vs_bc_max Vs_bnc_min Vs_bnc_max;... Vt_fx_min Vt_fx_max Vt_bc_min Vt_bc_max Vt_bnc_min Vt_bnc_max]; Patamar_x=patamar_s patamar_t; end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % FUNÇÃO DO CONTOLE AUTOMÁTICO DE TENSÃO - CAT % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [Out_cat]=CAT(tape,Out_mdl,Limites_Vx,Out_cat) global Par_CUT %Chama a variável global %Parâmetros utilizados na função barra=Par_CUT(16); Ts=Par_CUT(17); DVDT_lim=Par_CUT(18); switch barra %Verifica qual é a barra controlada case 2 %Barra secundária Vx=Out_mdl(4); %Tensão secundária medida %Limites de tensão da barra secundária Vx_fx_min=Limites_Vx(1,1); Vx_fx_max=Limites_Vx(1,2); Vx_bc_min=Limites_Vx(1,3); Vx_bc_max=Limites_Vx(1,4); %Vx_bnc_min=Limites_Vx(1,5); %Vx_bnc_max=Limites_Vx(1,6); case 3 %Barra terciária Vx=Out_mdl(5); %Tensão terciária medida %Limites de tensão da barra terciária Vx_fx_min=Limites_Vx(2,1); Vx_fx_max=Limites_Vx(2,2); Vx_bc_min=Limites_Vx(2,3); Vx_bc_max=Limites_Vx(2,4); %Vx_bnc_min=Limites_Vx(2,5); %Vx_bnc_max=Limites_Vx(2,6); end %Inicialização Dtape=0; %Zera variável de incremento e decremento do tape DV=Out_cat(2); estado=Out_cat(3); %=========================================================% % ESTADO 0 -> Tensão fora dos limites da barra controlada % %=========================================================% if Vx > Vx_bc_max Dtape=-1; DV=0; estado=1;

86
elseif Vx < Vx_bc_min Dtape=1; DV=0; estado=1; else switch estado %====================================% % ESTADO 1 -> Tensão dentro da faixa % %====================================% case 1 if Vx < Vx_fx_max && Vx > Vx_fx_min if DV > 0 DV=DV+((Vx-Vx_fx_max)*Ts); if DV < 0 DV=0; end elseif DV < 0 DV=DV+((Vx-Vx_fx_min)*Ts); if DV > 0 DV=0; end end end if Vx > Vx_fx_max estado=2; DV=DV+((Vx-Vx_fx_max)*Ts); end if Vx < Vx_fx_min estado=3; DV=DV+((Vx-Vx_fx_min)*Ts); end if DV > DVDT_lim Dtape=-1; DV=0; estado=1; end if DV < -(DVDT_lim) Dtape=1; DV=0; estado=1; end %=================================================% % ESTADO 2 -> Tensão anterior lida acima da faixa % %=================================================% case 2 if Vx < Vx_fx_max && Vx > Vx_fx_min estado=1; if DV==0 DV=0; else DV=DV+((Vx-Vx_fx_max)*Ts); end end if Vx > Vx_fx_max DV=DV+((Vx-Vx_fx_max)*Ts); end if Vx < Vx_fx_min estado=3; DV=0; end if DV > DVDT_lim Dtape=-1; DV=0; estado=1; end %==================================================% % ESTADO 3 -> Tensão anterior lida abaixo da faixa % %==================================================% case 3 if Vx < Vx_fx_max && Vx > Vx_fx_min estado=1; if DV==0 DV=0; else DV=DV+((Vx-Vx_fx_min)*Ts); end

87
end if Vx > Vx_fx_max estado=2; DV=0; end if Vx < Vx_fx_min DV=DV+((Vx-Vx_ fx_min)*Ts); end if DV < -(DVDT_lim) Dtape=1; DV=0; estado=1; end end end novo_tape=tape+Dtape; Out_cat=[novo_tape DV estado]; end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % FUNÇÃO DO FIM DE CURSO DO COMUTADOR % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [novo_tape,Est_BCx]=FC_Comutador(Out_mdl,Out_cat,Limites_Vx,Est_BCx) global Par_CUT %Chama a variável global %Parâmetros utilizados na função Vs_base=Par_CUT(2); %Tensão base do enrolamento secundário [kV] Vt_base=Par_CUT(3); %Tensão base do enrolamento terciário [kV] N_tapes=Par_CUT(7); %Número de tapes do transformador [Adim.] barra=Par_CUT(16); Par_BCx=evalin('base','Par_BCx'); novo_tape=Out_cat(1); BC_1A=Est_BCx(1); BC_1B=Est_BCx(2); switch logical(true) case novo_tape > N_tapes %Tape acima da posição máxima %Sem recurso para aumentar a tensão if BC_1A==1 && BC_1B==1 % && BC2==1... && BCn==1 %-> Todos os bancos ligados novo_tape=N_tapes; disp('CAT: sem recurso para aumentar a tensão!\n'); %Com bancos disponíveis para aumentar a tensão elseif BC_1A==0 || BC_1B==0 % || BC2==0... || BCn==0 %-> Um dos bancos desligados novo_tape=N_tapes; %Est_BCx=[BC_1A;BC_1B]; %;BC2;... BCn]; for k=1:1:length(Est_BCx) if Est_BCx(k)==0 Est_BCx(k)=1; break end end Q_BCx=Par_BCx*Est_BCx; [Out_tfc]=TF_Copel(Out_mdl,novo_tape,Q_BCx); switch barra %Verifica qual é a barra controlada case 2 %Barra secundária Vx_pu=Out_tfc(2); %Tensão secundária calculada [pu] Vx_mdl_pu=Out_mdl(4)/Vs_base; %Tensão secundária simulada no modelo completo [pu] case 3 %Barra terciária Vx_pu=Out_tfc(3); %Tensão terciária calculada [pu] Vx_mdl_pu=Out_mdl(5)/Vt_base; %Tensão terciária simulada no modelo completo [pu] end DV_BCx=abs(Vx_pu-Vx_mdl_pu); %Variação de tensão a cada comutação de banco [pu] Delta=Out_tfc(7); %Passo de tensão a cada comutação [pu]] novo_tape=novo_tape-round(DV_BCx/Delta); end case novo_tape <= 0 %Tape abaixo da posição mínima %Sem recurso para diminuir a tensão if BC_1A==0 && BC_1B==0 %&& BC2==0... BCn==0 -> Todos os bancos desligados novo_tape=1; disp('CAT: sem recurso para diminuir a tensão!\n'); %Com bancos disponíveis para diminuir a tensão elseif BC_1A==1 || BC_1B==1 % || BC2==1... || BCn==1 %-> Um dos bancos ligados novo_tape=1; %Est_BCx=[BC_1A;BC_1B]; %;BC2;... BCn]; for k=1:1:length(Est_BCx) if Est_BCx(k)==1 Est_BCx(k)=0; break
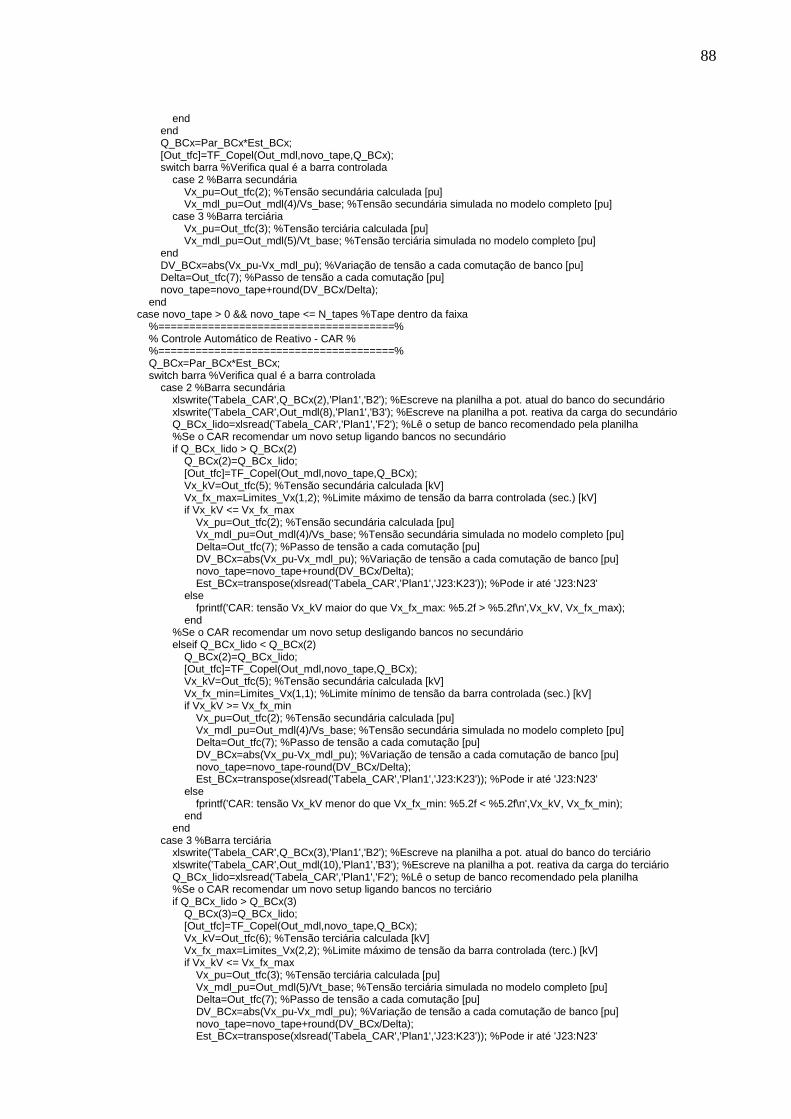
88
end end Q_BCx=Par_BCx*Est_BCx; [Out_tfc]=TF_Copel(Out_mdl,novo_tape,Q_BCx); switch barra %Verifica qual é a barra controlada case 2 %Barra secundária Vx_pu=Out_tfc(2); %Tensão secundária calculada [pu] Vx_mdl_pu=Out_mdl(4)/Vs_base; %Tensão secundária simulada no modelo completo [pu] case 3 %Barra terciária Vx_pu=Out_tfc(3); %Tensão terciária calculada [pu] Vx_mdl_pu=Out_mdl(5)/Vt_base; %Tensão terciária simulada no modelo completo [pu] end DV_BCx=abs(Vx_pu-Vx_mdl_pu); %Variação de tensão a cada comutação de banco [pu] Delta=Out_tfc(7); %Passo de tensão a cada comutação [pu] novo_tape=novo_tape+round(DV_BCx/Delta); end case novo_tape > 0 && novo_tape <= N_tapes %Tape dentro da faixa %======================================% % Controle Automático de Reativo - CAR % %======================================% Q_BCx=Par_BCx*Est_BCx; switch barra %Verifica qual é a barra controlada case 2 %Barra secundária xlswrite('Tabela_CAR',Q_BCx(2),'Plan1','B2'); %Escreve na planilha a pot. atual do banco do secundário xlswrite('Tabela_CAR',Out_mdl(8),'Plan1','B3'); %Escreve na planilha a pot. reativa da carga do secundário Q_BCx_lido=xlsread('Tabela_CAR','Plan1','F2'); %Lê o setup de banco recomendado pela planilha %Se o CAR recomendar um novo setup ligando bancos no secundário if Q_BCx_lido > Q_BCx(2) Q_BCx(2)=Q_BCx_lido; [Out_tfc]=TF_Copel(Out_mdl,novo_tape,Q_BCx); Vx_kV=Out_tfc(5); %Tensão secundária calculada [kV] Vx_fx_max=Limites_Vx(1,2); %Limite máximo de tensão da barra controlada (sec.) [kV] if Vx_kV <= Vx_fx_max Vx_pu=Out_tfc(2); %Tensão secundária calculada [pu] Vx_mdl_pu=Out_mdl(4)/Vs_base; %Tensão secundária simulada no modelo completo [pu] Delta=Out_tfc(7); %Passo de tensão a cada comutação [pu] DV_BCx=abs(Vx_pu-Vx_mdl_pu); %Variação de tensão a cada comutação de banco [pu] novo_tape=novo_tape+round(DV_BCx/Delta); Est_BCx=transpose(xlsread('Tabela_CAR','Plan1','J23:K23')); %Pode ir até 'J23:N23' else fprintf('CAR: tensão Vx_kV maior do que Vx_fx_max: %5.2f > %5.2f\n',Vx_kV, Vx_fx_max); end %Se o CAR recomendar um novo setup desligando bancos no secundário elseif Q_BCx_lido < Q_BCx(2) Q_BCx(2)=Q_BCx_lido; [Out_tfc]=TF_Copel(Out_mdl,novo_tape,Q_BCx); Vx_kV=Out_tfc(5); %Tensão secundária calculada [kV] Vx_fx_min=Limites_Vx(1,1); %Limite mínimo de tensão da barra controlada (sec.) [kV] if Vx_kV >= Vx_fx_min Vx_pu=Out_tfc(2); %Tensão secundária calculada [pu] Vx_mdl_pu=Out_mdl(4)/Vs_base; %Tensão secundária simulada no modelo completo [pu] Delta=Out_tfc(7); %Passo de tensão a cada comutação [pu] DV_BCx=abs(Vx_pu-Vx_mdl_pu); %Variação de tensão a cada comutação de banco [pu] novo_tape=novo_tape-round(DV_BCx/Delta); Est_BCx=transpose(xlsread('Tabela_CAR','Plan1','J23:K23')); %Pode ir até 'J23:N23' else fprintf('CAR: tensão Vx_kV menor do que Vx_fx_min: %5.2f < %5.2f\n',Vx_kV, Vx_fx_min); end end case 3 %Barra terciária xlswrite('Tabela_CAR',Q_BCx(3),'Plan1','B2'); %Escreve na planilha a pot. atual do banco do terciário xlswrite('Tabela_CAR',Out_mdl(10),'Plan1','B3'); %Escreve na planilha a pot. reativa da carga do terciário Q_BCx_lido=xlsread('Tabela_CAR','Plan1','F2'); %Lê o setup de banco recomendado pela planilha %Se o CAR recomendar um novo setup ligando bancos no terciário if Q_BCx_lido > Q_BCx(3) Q_BCx(3)=Q_BCx_lido; [Out_tfc]=TF_Copel(Out_mdl,novo_tape,Q_BCx); Vx_kV=Out_tfc(6); %Tensão terciária calculada [kV] Vx_fx_max=Limites_Vx(2,2); %Limite máximo de tensão da barra controlada (terc.) [kV] if Vx_kV <= Vx_fx_max Vx_pu=Out_tfc(3); %Tensão terciária calculada [pu] Vx_mdl_pu=Out_mdl(5)/Vt_base; %Tensão terciária simulada no modelo completo [pu] Delta=Out_tfc(7); %Passo de tensão a cada comutação [pu] DV_BCx=abs(Vx_pu-Vx_mdl_pu); %Variação de tensão a cada comutação de banco [pu] novo_tape=novo_tape+round(DV_BCx/Delta); Est_BCx=transpose(xlsread('Tabela_CAR','Plan1','J23:K23')); %Pode ir até 'J23:N23'
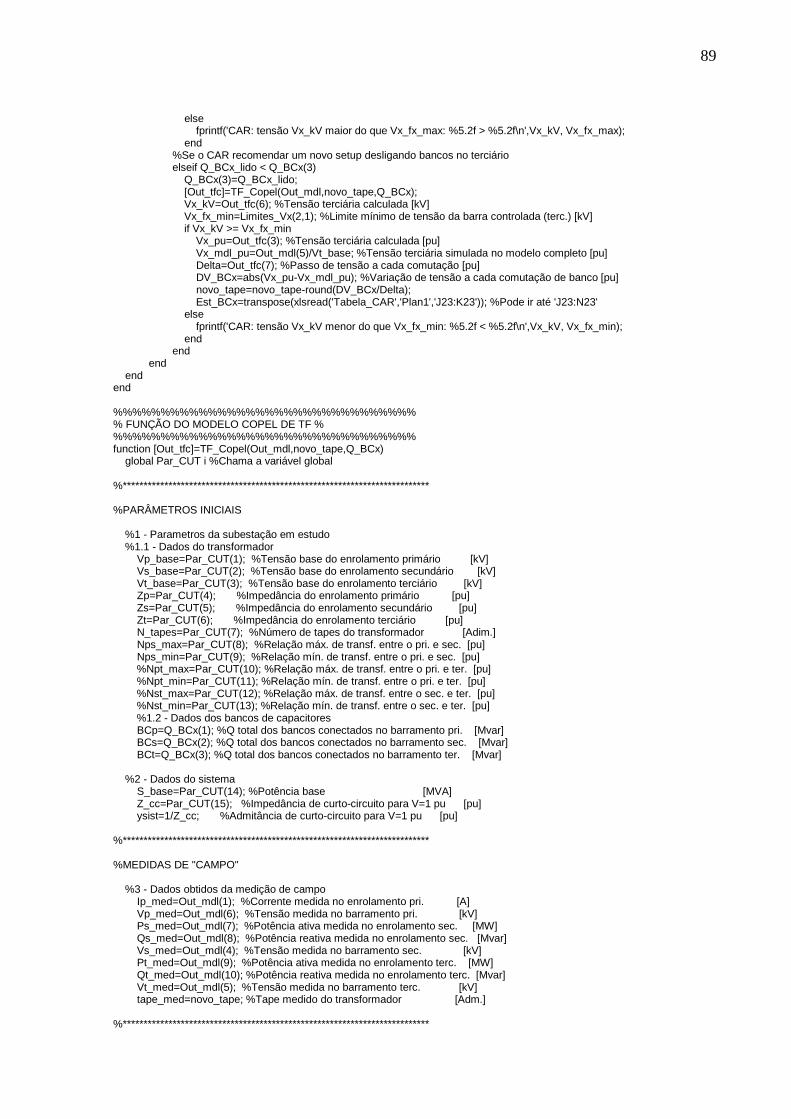
89
else fprintf('CAR: tensão Vx_kV maior do que Vx_fx_max: %5.2f > %5.2f\n',Vx_kV, Vx_fx_max); end %Se o CAR recomendar um novo setup desligando bancos no terciário elseif Q_BCx_lido < Q_BCx(3) Q_BCx(3)=Q_BCx_lido; [Out_tfc]=TF_Copel(Out_mdl,novo_tape,Q_BCx); Vx_kV=Out_tfc(6); %Tensão terciária calculada [kV] Vx_fx_min=Limites_Vx(2,1); %Limite mínimo de tensão da barra controlada (terc.) [kV] if Vx_kV >= Vx_fx_min Vx_pu=Out_tfc(3); %Tensão terciária calculada [pu] Vx_mdl_pu=Out_mdl(5)/Vt_base; %Tensão terciária simulada no modelo completo [pu] Delta=Out_tfc(7); %Passo de tensão a cada comutação [pu] DV_BCx=abs(Vx_pu-Vx_mdl_pu); %Variação de tensão a cada comutação de banco [pu] novo_tape=novo_tape-round(DV_BCx/Delta); Est_BCx=transpose(xlsread('Tabela_CAR','Plan1','J23:K23')); %Pode ir até 'J23:N23' else fprintf('CAR: tensão Vx_kV menor do que Vx_fx_min: %5.2f < %5.2f\n',Vx_kV, Vx_fx_min); end end end end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % FUNÇÃO DO MODELO COPEL DE TF % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [Out_tfc]=TF_Copel(Out_mdl,novo_tape,Q_BCx) global Par_CUT i %Chama a variável global %************************************************************************** %PARÂMETROS INICIAIS %1 - Parametros da subestação em estudo %1.1 - Dados do transformador Vp_base=Par_CUT(1); %Tensão base do enrolamento primário [kV] Vs_base=Par_CUT(2); %Tensão base do enrolamento secundário [kV] Vt_base=Par_CUT(3); %Tensão base do enrolamento terciário [kV] Zp=Par_CUT(4); %Impedância do enrolamento primário [pu] Zs=Par_CUT(5); %Impedância do enrolamento secundário [pu] Zt=Par_CUT(6); %Impedância do enrolamento terciário [pu] N_tapes=Par_CUT(7); %Número de tapes do transformador [Adim.] Nps_max=Par_CUT(8); %Relação máx. de transf. entre o pri. e sec. [pu] Nps_min=Par_CUT(9); %Relação mín. de transf. entre o pri. e sec. [pu] %Npt_max=Par_CUT(10); %Relação máx. de transf. entre o pri. e ter. [pu] %Npt_min=Par_CUT(11); %Relação mín. de transf. entre o pri. e ter. [pu] %Nst_max=Par_CUT(12); %Relação máx. de transf. entre o sec. e ter. [pu] %Nst_min=Par_CUT(13); %Relação mín. de transf. entre o sec. e ter. [pu] %1.2 - Dados dos bancos de capacitores BCp=Q_BCx(1); %Q total dos bancos conectados no barramento pri. [Mvar] BCs=Q_BCx(2); %Q total dos bancos conectados no barramento sec. [Mvar] BCt=Q_BCx(3); %Q total dos bancos conectados no barramento ter. [Mvar] %2 - Dados do sistema S_base=Par_CUT(14); %Potência base [MVA] Z_cc=Par_CUT(15); %Impedância de curto-circuito para V=1 pu [pu] ysist=1/Z_cc; %Admitância de curto-circuito para V=1 pu [pu] %************************************************************************** %MEDIDAS DE "CAMPO" %3 - Dados obtidos da medição de campo Ip_med=Out_mdl(1); %Corrente medida no enrolamento pri. [A] Vp_med=Out_mdl(6); %Tensão medida no barramento pri. [kV] Ps_med=Out_mdl(7); %Potência ativa medida no enrolamento sec. [MW] Qs_med=Out_mdl(8); %Potência reativa medida no enrolamento sec. [Mvar] Vs_med=Out_mdl(4); %Tensão medida no barramento sec. [kV] Pt_med=Out_mdl(9); %Potência ativa medida no enrolamento terc. [MW] Qt_med=Out_mdl(10); %Potência reativa medida no enrolamento terc. [Mvar] Vt_med=Out_mdl(5); %Tensão medida no barramento terc. [kV] tape_med=novo_tape; %Tape medido do transformador [Adm.] %**************************************************************************

90
%CÁLCULOS INICIAIS %3 - Transformação estrela para triângulo %3.1 - Cálculo intermediário Z1=Zp*Zs; Z2=Zs*Zt; Z3=Zt*Zp; Zxx=Z1+Z2+Z3; %3.2 - Cálculo final Zps=Zxx/Zt; Zst=Zxx/Zp; Zpt=Zxx/Zs; %4 - Cálculo do equivalente pi do transformador Delta=(Nps_max-Nps_min)/(N_tapes-1); %Passo de tensão a cada comutação [pu] tps=1/(Nps_max-(tape_med-1)*Delta); %Relação de transformação vista pela baixa [Adm.] %4.1 - Admitância entre primário e secundário y1ps=tps*(1/Zps); %[pu] y2ps=y1ps*(tps-1); %[pu] y3ps=(1/Zps)*(1-tps); %[pu] %4.2 - Admitância entre secundário e terciário tst=1; %[Adm.] y1st=tst*(1/Zst); %[pu] y2st=y1st*(tst-1); %[pu] y3st=(1/Zst)*(1-tst); %[pu] %4.3 - Admitância entre primário e terciário tpt=tps; %[Adm.] y1pt=tpt*(1/Zpt); %[pu] y2pt=y1pt*(tpt-1); %[pu] y3pt=(1/Zpt)*(1-tpt); %[pu] %************************************************************************** %CÁLCULOS INTERMEDIÁRIOS %5 - Admitâncias no barramento primário %5.1 - Potência complexa da carga no primário Pp_carga=0; %[MW] Qp_carga=0; %[Mvar] Sp_carga=(Pp_carga+1i*Qp_carga)/S_base; %[pu] %5.2 - Tensão no primário Vp_pu=Vp_med/Vp_base; %[pu] %5.3 - Admitância da carga calculada no primário yp_carga=conj(Sp_carga)/(Vp_pu^2); %[pu] %5.4 - Potência reativa atual do BCp - cálculo necessário devido %a potência do BCp variar com a tensão aplicada Q_BCp=BCp*(Vp_pu)^2; %[Mvar] %5.5 - Admitância do BCp yp_BCp=conj(-Q_BCp/S_base)/(Vp_pu^2); %[pu] %6 - Admitâncias no barramento secundário %6.1 - Potência complexa da carga no secundário Ps_carga=Ps_med; %[MW] Qs_carga=Qs_med; %[Mvar] Ss_carga=(Ps_carga+1i*Qs_carga)/S_base; %[pu] %6.2 - Tensão no secundário Vs_pu=Vs_med/Vs_base; %[pu] %6.3 - Admitância da carga calculada no secundário ys_carga=conj(Ss_carga)/(Vs_pu^2); %[pu] %6.4 - Potência reativa atual do BCs - cálculo necessário devido %a potência do BCs variar com a tensão aplicada Q_BCs=BCs*(Vs_pu)^2; %[Mvar] %6.5 - Admitância do BCs ys_BCs=conj(-Q_BCs/S_base)/(Vs_pu^2); %[pu] %7 - Admitâncias no barramento terciário %7.1 - Potência complexa da carga no terciário Pt_carga=Pt_med; %[MW] Qt_carga=Qt_med; %[Mvar] St_carga=(Pt_carga+1i*Qt_carga)/S_base; %[pu] %7.2 - Tensão no terciário Vt_pu=Vt_med/Vt_base; %[pu] %7.3 - Admitância da carga calculada no terciário yt_carga=conj(St_carga)/(Vt_pu^2); %[pu] %7.4 - Potência reativa atual do BCt - cálculo necessário devido %a potência do BCt variar com a tensão aplicada

91
Q_BCt=BCt*(Vt_pu)^2; %[Mvar] %7.5 - Admitância do BCt yt_BCt=conj(-Q_BCt/S_base)/(Vt_pu^2); %[pu] %************************************************************************** %RESOLUÇÃO DO SISTEMA ELÉTRICO %8 - Montagem da matriz admitância "Y" - todos os valores em pu y11=y1ps+y2ps+y1pt+y2pt+yp_carga+yp_BCp+ysist; y12=-y1ps; y13=-y1pt; y21=-y1ps; y22=y1ps+y3ps+y1st+y2st+ys_carga+ys_BCs; y23=-y1st; y31=-y1pt; y32=-y1st; y33=y1pt+y3pt+y1st+y3st+yt_carga+yt_BCt; Y=[y11 y12 y13;y21 y22 y23;y31 y32 y33]; %9 - Montagem da matriz das correntes "G" Z_cc_Ohms=Z_cc*((Vp_base^2)/S_base); %[Ohms] Vsist=(Z_cc_Ohms*Ip_med+Vp_med*1000)/(Vp_base*1000); %[pu] %10 - Motangem dos determinantes Yp, Ys e Yt Yp=[ysist*Vsist y12 y13;0 y22 y23;0 y32 y33]; Ys=[y11 ysist*Vsist y13;y21 0 y23;y31 0 y33]; Yt=[y11 y12 ysist*Vsist;y21 y22 0;y31 y32 0]; %11 - Cálculo das tensões em pu Vp_pu=abs(det(Yp)/det(Y)); Vs_pu=abs(det(Ys)/det(Y)); Vt_pu=abs(det(Yt)/det(Y)); %12 - Retorno da função em kV Vp_kV=Vp_pu*Vp_base; Vs_kV=Vs_pu*Vs_base; Vt_kV=Vt_pu*Vt_base; [Out_tfc]=[Vp_pu Vs_pu Vt_pu Vp_kV Vs_kV Vt_kV Delta]; xlswrite('Saída_CUT.xls',i,'Plan2',strcat('A',num2str(i+1))); xlswrite('Saída_CUT.xls',Out_tfc,'Plan2',strcat('B',num2str(i+1))); end %%%%%%%%%%%%%%%%%%% % FUNÇÃO DE SAÍDA % %%%%%%%%%%%%%%%%%%% function Saida(i,i_ini,tape,Out_mdl,Limites_Vx,Patamar_x,Out_cat,Est_BCx) if i==i_ini xlswrite('Saída_CUT.xls','i','tape','Ip_mdl','Is_mdl','It_mdl','Vs_mdl','Vt_mdl','Vp','Ps','Qs','Pt','Qt',... 'Vt_fx_min','Vt_fx_max','Vt_bc_min','Vt_bc_max','Vt_bnc_min','Vt_bnc_max','novo_tape','DV','estado','BC_1A','BC_1B','patamar_x',... 'Plan1','A1'); xlswrite('Saída_CUT.xls','i','Vp_pu','Vs_pu','Vt_pu','Vp_kV','Vs_kV','Vt_kV','Delta','Plan2','A1'); end %xlswrite('Saída_CUT.xls',i,'Plan1',strcat('A',num2str(i+1))); %xlswrite('Saída_CUT.xls',tape,'Plan1',strcat('B',num2str(i+1))); %xlswrite('Saída_CUT.xls',Out_mdl,'Plan1',strcat('C',num2str(i+1))); %xlswrite('Saída_CUT.xls',Limites_Vx(2,:),'Plan1',strcat('M',num2str(i+1))); %xlswrite('Saída_CUT.xls',Patamar_x(2),'Plan1',strcat('Q',num2str(i+1))); %xlswrite('Saída_CUT.xls',Out_cat,'Plan1',strcat('R',num2str(i+1))); %xlswrite('Saída_CUT.xls',transpose(Est_BCx),'Plan1',strcat('U',num2str(i+1))); Saida_CUT=[i tape Out_mdl Limites_Vx(2,:) Out_cat transpose(Est_BCx)]; xlswrite('Saída_CUT.xls',Saida_CUT,'Plan1',strcat('A',num2str(i+1))); xlswrite('Saída_CUT.xls',Patamar_x(2),'Plan1',strcat('X',num2str(i+1))); end