senales~ y sistemas cap tulo 2: senales~segodoy/teaching/549104/cap02-signals.pdfya discutimos que...
TRANSCRIPT
Senales y SistemasCapıtulo 2: Senales
Sebastian E. Godoy ([email protected])
Departamento de Ingenierıa ElectricaUniversidad de Concepcion, Concepcion, Chile
Marzo 2015
Marzo 2015 1 / 41

Tabla de Contenidos
SenalesSenales de pruebaMuestreoOperaciones basicas sobre senales
Escalamiento en amplitudEscalamiento en el tiempoInversion en el tiempoDesplazamiento en el tiempoCombinaciones
ConvolucionIntegral de convolucionSumatoria de convolucionConvolucion cıclica
Resumen capıtulo
Marzo 2015 2 / 41

Senales Senales de prueba
Senales de prueba
I Las senales de prueba son aquellas que utilizamos para caracterizar unsistema de forma “empirica”
→“Aplicamos” una senal de prueba conocida a un sistema paraevaluar su respuesta
I Las senales que ya estudiamos son las senales de prueba tıpicas:I ImpusoI Escalon unitarioI Rampa unitariaI Exponenciales y sinusoidales
Marzo 2015 3 / 41

Senales Muestreo
MuestreoYa discutimos que las senales continuas y las discretas (muestreadas ydigitales) estan relacionadas por un proceso que se conoce como muestreo
1. Concepto de muestreo mediante interruptor
x(t)→ Interruptor en nT → x(nT ) ≡ x [n]
2. Matematicamente hablando el interruptor en el instante nT serepresenta por un impulso: δ(t − nT ). Esto pues x(nT ) = x(t)δ
3. Si uno quiere tomar muestras cada T segundos entonces debe definirun “tren de impulsos”
p(t) = · · ·+ δ(t + 2) + δ(t + 1) + δ(t) + δ(t − 1) + δ(t − 2) + · · ·
=∞∑
n=−∞δ(t − nT )
Marzo 2015 4 / 41

Senales Muestreo
Muestreo
4. Ası, la senal x(·) muestreada cada T segundos se representamatematicamente mediante
x [n] ≡ x(nT ) ,∞∑
n=−∞x(t)δ(t − nT )
5. El resultado es el siguiente:
(1) Senal x(t) (2) Tren de impulsos, p(t) (3) Senal muestreada, xs(t)
Marzo 2015 5 / 41

Senales Muestreo
Muestreo: Efecto de T sobre el muestreo
(4) x(t) (5) p(t) (6) xs(t)
(7) x(t) (8) p(t) (9) xs(t)
Marzo 2015 6 / 41

Senales Muestreo
Muestreo: Efecto de T sobre el muestreo
(10) x(t) (11) p(t) (12) xs(t)
Si uno disminuye el tiempo de muestro se llega a un punto en donde lasenal original ya no se puede recuperar a partir de las muestras
Marzo 2015 7 / 41
Senales Operaciones basicas sobre senales
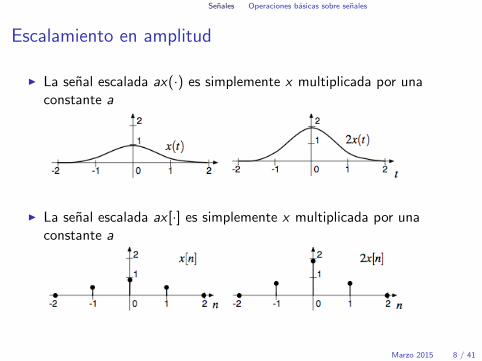
Escalamiento en amplitud
I La senal escalada ax(·) es simplemente x multiplicada por unaconstante a
I La senal escalada ax [·] es simplemente x multiplicada por unaconstante a
Marzo 2015 8 / 41

Senales Operaciones basicas sobre senales
Escalamiento en el tiempo: Senales continuas
Una senal x(·) se escala en el tiempo al multiplicar la variable de tiempopor una constante positiva b para producir x(bt)
Si b > 0 la senal se puede expandir (0 < b < 1) o comprimir (b > 1) enel tiempo
Marzo 2015 9 / 41
Senales Operaciones basicas sobre senales
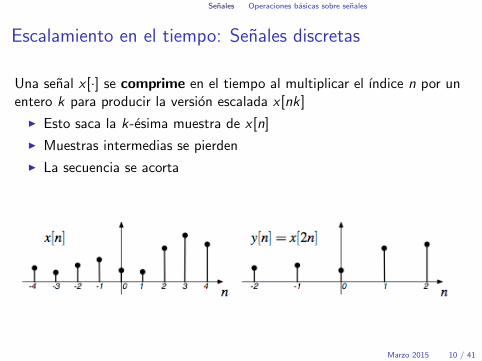
Escalamiento en el tiempo: Senales discretas
Una senal x [·] se comprime en el tiempo al multiplicar el ındice n por unentero k para producir la version escalada x [nk]
I Esto saca la k-esima muestra de x [n]
I Muestras intermedias se pierden
I La secuencia se acorta
Marzo 2015 10 / 41

Senales Operaciones basicas sobre senales
Escalamiento en el tiempo: Senales discretas
Una senal x [·] se expande en el tiempo al divifir el ındice n por un enterom para producir la version escalada x [n/m]
I Esto “introduce” la m-esima muestra de x [n]
I Estas muestras intermedias deben ser sintetizadas (creadas). Porejemplo se pueden hacer cero o usar interpolacion
I La secuencia se alarga
Esto se llama “upsampling” o simplemente interpolacion
Marzo 2015 11 / 41

Senales Operaciones basicas sobre senales
Inversion en el tiempo
I En tiempo continuo, reemplazar t con −t para generar x(−t)
I En tiempo discreto, reemplazar n por −n para generar x [−n]
I Es lo mismo que escalamiento con b = −1
Marzo 2015 12 / 41
Senales Operaciones basicas sobre senales
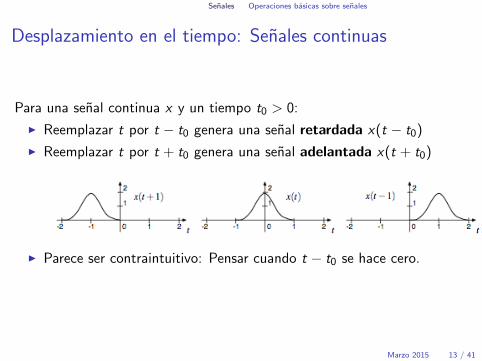
Desplazamiento en el tiempo: Senales continuas
Para una senal continua x y un tiempo t0 > 0:
I Reemplazar t por t − t0 genera una senal retardada x(t − t0)
I Reemplazar t por t + t0 genera una senal adelantada x(t + t0)
I Parece ser contraintuitivo: Pensar cuando t − t0 se hace cero.
Marzo 2015 13 / 41

Senales Operaciones basicas sobre senales
Desplazamiento en el tiempo: Senales discretas
Para una senal discreta x y un entero n0 > 0:
I x [n − n0] es una senal retardada
I x [n + n0] es una senal adelantada
I Parece ser contraintuitivo: Nuevamente pensar cuando n − n0 se hacecero.
Marzo 2015 14 / 41

Senales Operaciones basicas sobre senales
Combinaciones de operaciones
I Escalamiento, desplazamiento e inversion en el tiempo pueden sercombinadas
I Las operaciones pueden ser realizadas en cualquier orden, pero hayque ser cuidadosos
I Esto de seguro le causara confusion
Ejemplo: Bosquejar la senal x(2(t − 1)) sabiendo que x(t) = 2 parat ∈ [−1, 1] y x(t) = 0 para t 6∈ [−1, 1].Solucion: Recomiendo siempre escalar en el origen (antes de desplazar)por lo tanto se obtiene x(2t) = 2 para t ∈ [−1/2, 1/2] y cero para t fuerade dicho intervalo. Ası, x(2(t − 1)) = 2 para t ∈ [1/2, 3/2] y cero fuera dedicho intervalo
Marzo 2015 15 / 41
Senales Convolucion
Convolucion: Relacion entrada-salida SLIT
Recordemos que para un sistema L.I.T. la respuesta a entrada impulso hnos permite obtener la salida del sistema para cualquier entrada:
Sabiendo h = T (δ), con T un S.L.I.T
δ → SLIT → h
Entonces, para una entrada cualquiera x , la salida asociada, y estadeterminada por
y = x ∗ h
en donde ∗ representa la convolucion entre las senales x (entrada) y h (larespuesta a entrada escalon)
Marzo 2015 16 / 41
Senales Convolucion
Integral de Convolucion
Vimos que para sistemas en tiempo continuo, la convolucion entre dossenales genericas f y g se define mediante la integral
(f ∗ g)(t) =
∫ ∞−∞
f (τ)g(t − τ) dτ
Esto se traduce en y(t) = (x ∗ h)(t) en terminologıa de nuestros sistemas.
y(t) =
∫ ∞−∞
x(τ)h(t − τ) dτ
Marzo 2015 17 / 41

Senales Convolucion
Integral de Convolucion
I Si el sistema LIT es causal, entonces h(t) = 0, para t < 0
⇒ h(t − τ) = 0, para t − τ < 0⇒ h(t − τ) = 0, para t < τ
entonces
y(t) =
∫ t
−∞x(τ)g(t − τ) dτ
vale decir, solo valores presentes y pasados de x contribuyen paragenerar y
I Si ademas x es causal, entonces x(t) = 0 para t < 0, por lo que laintegral se simplifica aun mas:
y(t) =
∫ t
0x(τ)g(t − τ) dτ
Marzo 2015 18 / 41

Senales Convolucion
Integral de Convolucion: Propiedades
Conmutatividad: La convolucion es conmutativa (f ∗ g) = (g ∗ f )
Demostracion: Reemplazar λ = t − τ en la definicion:
(f ∗ g)(t) ,∫ ∞−∞
f (τ)g(t − τ) dτ
= −∫ −∞∞
f (t − λ)g(λ) dλ
=
∫ ∞−∞
g(λ)f (t − λ) dλ
, (g ∗ f )(t)
Marzo 2015 19 / 41

Senales Convolucion
Integral de Convolucion: Propiedades
Distributividad con respecto a la suma:
f ∗ (g + h) = f ∗ g + f ∗ h
Demostracion:
(f ∗ (g + h))(t) ,∫ ∞−∞
f (τ)(g(t − τ) + h(t − τ)) dτ
=
∫ ∞−∞
f (τ)g(t − τ) + f (τ)h(t − τ) dτ
=
∫ ∞−∞
f (τ)g(t − τ)dτ +
∫ ∞−∞
f (τ)h(t − τ) dτ
, (f ∗ g)(t) + (f ∗ h)(t)
Marzo 2015 20 / 41
Senales Convolucion
Integral de Convolucion: Propiedades
Asociatividad:f ∗ (g ∗ h) = (f ∗ g) ∗ h
Las propiedaedes de conmutatividad, asociatividad y distribucion significaque existe una “algebra de senales” en donde
I La suma de senales es igual a la suma aritmetica o en algebraelemental, y
I La multiplicacion es reemplazada por la convolucion
Marzo 2015 21 / 41

Senales Convolucion
Integral de Convolucion: PropiedadesConvolucion con un impulso: Permıtame la notacion
f (t) ∗ δ(t − t0) = f (t − t0)
Demostracion:
f (t) ∗ δ(t − t0) ,∫ ∞−∞
f (τ)δ(t − t0 − τ) dτ
=
∫ ∞−∞
f (t − τ)δ(τ − t0) dτ
= f (t − t0)
Convolucion con un escalon: Dado que el escalon es causal, entonces
(f ∗ u)(t) =
∫ t
−∞f (τ) dτ
Marzo 2015 22 / 41

Senales Convolucion
Integral de Convolucion: PropiedadesDado que los sistemas que son descritos por una convolucion son SLIT,entonces los sistemas se pueden componer en base a sistemas en cascadaEl sistema en cascada y = (x ∗ f ) ∗ g
es equivalente al sistema individual con respuesta a entrada impulsoh = f ∗ g
Marzo 2015 23 / 41

Senales Convolucion
Integral de Convolucion: Propiedades
Ademas, dado que la convolucion es conmutativa, entonces cualquiercombinacion de sistemas en cascada es tambien conmutativa
Asi, estas dos combinaciones dan exactamente la misma respuesta, y parala misma entrada x
Esto es importante pues muchos sistemas pueden ser descritos porconvolucion y todos conmutan.Por ejemplo: integrador, diferenciadores, retardos, etc.
Marzo 2015 24 / 41

Senales Convolucion
Integral de Convolucion: Propiedades
Ejemplo: Medir la respuesta impulso de un sistema
δ(t)→ SLIT → h(t)
Hemos dicho que la respuesta impulso es muy importante para caracterizarlos sistemas, sin embargo esto presenta dificultades de implementacion
Una alternativa comun es medir la respuesta escalon, s(·), vale decir larespuesta cuando la entrada es un escalon unitario, u(·)
u(t)→ SLIT → s(t)
Marzo 2015 25 / 41

Senales Convolucion
Integral de Convolucion: Propiedades
La respuesta impulso se obtiene mediante la derivada de la salida escalon
u(t)→ SLIT → s(t)→ d
dt→ h(t)
Para comprobar esto, recordemos que el sistema diferenciador es tambienun sistema SLIT, por lo que se puede expresar en funcion de unaconvolucion. Por lo tanto, conmuta:
u(t)→ d
dt→ δ(t)→ SLIT → h(t)
Marzo 2015 26 / 41

Senales Convolucion
Integral de Convolucion: PropiedadesSLIT para entrada exponencial compleja: Si tenemos un SLIT su salidaesta determinada por y = x ∗ h, en donde h es la salida a entrada impulso.Que pasa si la entrada es una exponencial compleja: x(t) = est en dondes es un numero complejo, es decir s = σ + jω?
y(t) =
∫ ∞−∞
x(t − τ)h(τ) dτ
=
∫ ∞−∞
es(t−τ)h(τ) dτ
=
∫ ∞−∞
este−sτh(τ) dτ = est∫ ∞−∞
e−sτh(τ) dτ
es decir, recuperamos la misma exponencial compleja, pero multiplicadapor una constante compleja
H(s) =
∫ ∞−∞
e−sτh(τ) dτ
Marzo 2015 27 / 41

Senales Convolucion
Integral de Convolucion: Propiedades
Si esta integral converge (veremos que significa esto luego) entonces lasalida de mi sistema sera
y(t) = estH(s)
La funcion compleja H(s) se conoce como la funcion de transferenciadel sistema.
En el capitulo 3 desarrollaremos con mas detalle este concepto.(El punto importante es que Ud. sepa desde ya la conexion.)
Marzo 2015 28 / 41

Senales Convolucion
Integral de Convolucion: Calculo
Para calcular la integral de convolucion
y(t) =
∫ ∞−∞
x(τ)h(t − τ) dτ
en general se siguen los siguientes pasos
1. Recuerde: h(t − τ) es la respuesta impulse retardada al tiempo τ
2. Si consideramos h(t − τ) como una funcion de τ , entonces h(t − τ)esta retardada al tiempo t e invertida
Marzo 2015 29 / 41

Senales Convolucion
Integral de Convolucion: Calculo
3. Esto se multiplica punto a punto con la entrada
4. Posteriormente se integra sobre τ para obtener y para dicho valor de t
Marzo 2015 30 / 41

Senales Convolucion
Integral de Convolucion: Calculo
Graficamente:
1. Invertir en el tiempo la respuesta a entrada impulso h(τ). Esto generah(−τ)
2. Arrastrar hacia la derecha sobre t para obtener h(−(τ − t)) = h(t− τ)
3. Multiplicar punto a punto para obtener x(τ)h(t − τ)
4. Integrar sobre τ para obtener y(t)
Marzo 2015 31 / 41
Senales Convolucion
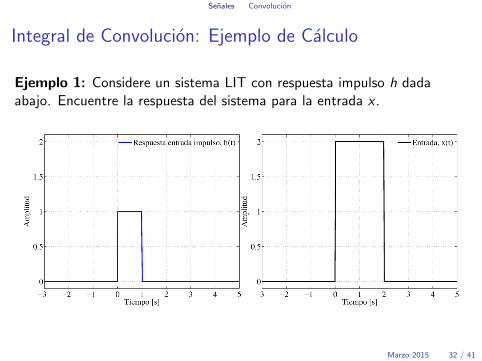
Integral de Convolucion: Ejemplo de Calculo
Ejemplo 1: Considere un sistema LIT con respuesta impulso h dadaabajo. Encuentre la respuesta del sistema para la entrada x .
Marzo 2015 32 / 41

Senales Convolucion
Integral de Convolucion: Ejemplo de Calculo
Ejemplo 1: Considere un sistema LIT con respuesta impulso h dadaabajo. Encuentre la respuesta del sistema para la entrada x .
Solucion a ejemplo 1:
Marzo 2015 33 / 41
Senales Convolucion
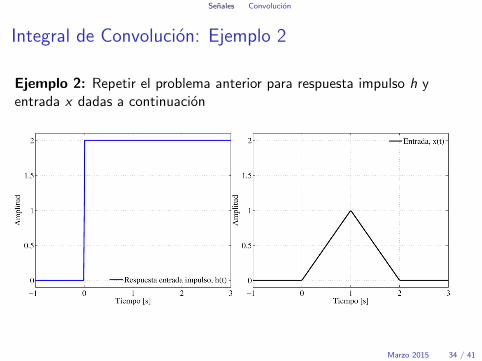
Integral de Convolucion: Ejemplo 2
Ejemplo 2: Repetir el problema anterior para respuesta impulso h yentrada x dadas a continuacion
Marzo 2015 34 / 41

Senales Convolucion
Integral de Convolucion: Ejemplo 2
Ejemplo 2: Repetir el problema anterior para respuesta impulso h yentrada x dadas a continuacion
Solucion a ejemplo 1:
Marzo 2015 35 / 41

Senales Convolucion
Sumatoria de convolucion
Recordemos que para un sistema LIT discreto, la respuesta a entradaimpulso discreto unitario, δ[·], la denotamos por h[·]
δ → SLIT → h
En el capıtulo anterior obtuvimos que para estos sistemas, la salida parauna entrada x era
y [n] =∞∑
k=−∞x [k]h[n − k]
la que denotamos como sumatoria de convolucion
Esta operacion esta en el corazon de cualquier sistema de procesamientodigital (de senales o imagenes)
Marzo 2015 36 / 41
Senales Convolucion
Sumatoria de convolucion
En general, la convolucion entre dos secuencias f y g se define de lamisma forma
(f ∗ g)[n] =∞∑
k=−∞f [k]g [n − k]
Y satisface las propiedades de conmutatividad, asociatividad, distribuciony homogeneidad
Esta convolucion es normalmente conocida como convolucion lineal.
Marzo 2015 37 / 41

Senales Convolucion
Sumatoria de convolucion: Calculo
Resolvemos la convolucion de la misma forma que en tiempo continuo:
y [n] = (f ∗ g)[n] =∞∑
k=−∞f [k]g [n − k]
Graficamente:
1. Invertir en el tiempo una senal g [n] para generar g [−n]
2. Arrastrar hacia la derecha sobre k para obtenerg [−(k − n)] = g [n − k]
3. Multiplicar punto a punto para obtener f [k]g [n − k]
4. Sumar todas las componentes sobre k para obtener y [n]
Marzo 2015 38 / 41

Senales Convolucion
Sumatoria de convolucion: Calculo
Para calcular convolucion de secuencias es bueno recordar las siguientespropiedades:
n∑k=0
k =n∑
k=1
k =n(n + 1)
2(1)
n∑k=0
k2 =n(n + 1)(2n + 1)
6(2)
n∑k=0
k3 =
(n(n + 1)
2
)2
(3)
−1∑k=−n
k = −n∑
k=1
kn∑
k=0
k =`−1∑k=0
k +n∑
k=`
k (4)
Marzo 2015 39 / 41

Senales Convolucion
Convolucion cıclica
La convolucion lineal normalmente diverge cuando se calcula sobre senalesdiscretas periodicas.
Por lo tanto se define el concepto de convolucion cıclica (o circular)entre dos secuencias f y g mediante
(f ∗c g)[n] =L−1∑k=0
f [k]g [n − k] ,
en donde se emplea el sımbolo “∗c” para especificar claramente que es laconvolucion cıclica y no la linear revisada anteriormente.
El parametro L se conoce como el largo de las secuencias. Para senalesperiodicas uno fija L tal que sea igual a periodo
Marzo 2015 40 / 41
Resumen capıtulo
Resumen capıtulo:
En este capıtulo hemos revisado los siguientes conceptos importantes:
I Muestreo desde el punto de vista del tiempo
I Operaciones basicas sobre las senales que nos permitieron aprendercomo calcular la convolucion
I La convolucion como una propiedad de sistemas LIT
I Aprendimos a calcular convolucion en tiempo continuo y discreto
En el siguiente capıtulo revisaremos en detalle como modelar sistemasmediante ecuaciones diferenciales, de diferencias finitas y estado.
Marzo 2015 41 / 41