wady mechanizmów - dmcslux.dmcs.pl/~piotrowi/mpw/wyklad3.pdfwady mechanizmów niskopoziomowych...
TRANSCRIPT

Wady mechanizmów
niskopoziomowych
Ingerencja w kod systemu operacyjnego (przerwania)
Programowanie na niski poziomie (instrukcje specjalne)
Trudności implementacyjne (alg. Dekkera zależny od liczby synchronizowanych procesów)

Mechanizmy wysokopoziomowe
użyteczne w programowaniu
współbieżnym
Mechanizmy synchronizacji
semafory
rejony krytyczne
monitory
Mechanizmy synchronizacji i komunikacji
spotkania symetryczne i asymetryczne
przestrzenie krotek
potoki, komunikaty i kanały

Pojęcie semafora
Dijkstra (1965r.)
Definicja abstrakcyjnego typu danych wraz z
operacjami umożliwiającymi wstrzymywanie i
wznawianie procesów:
określenie stanu początkowego
podniesienie semafora (signal(s), V(s))
opuszczenie semafora (wait(s), P(s))
Operacje niepodzielne – w danej chwili może
być wykonywana tylko jedna z nich.

Typy semaforów
Propozycje Dijkstry:
semafor ogólny
semafor binarny
Późniejsze rozszerzenia:
semafor uogólniony
semafor dwustronnie ograniczony

Definicja semafora
Zmienna całkowita z wyróżnionymi operacjami:
• podniesienia semafora (signal(s)): s:=s+1
• opuszczenia semafora (wait(s)): czekaj na (s>0); s:=s-1
Definicja nie gwarantuje, że wszystkie procesy zostaną kiedyś wznowione.

„Praktyczna” definicja
operacji na semaforze
Opuszczenie semafora (wait(s))
• jeżeli s>0, to s:=s-1
• jeśli s=0, to wstrzymaj proces wywołujący operację;
Podniesienie semafora (signal(s))
• jeżeli istnieją procesy wstrzymane przez opuszczony semafor s, to wznów jeden z nich
• jeśli nie, to s:=s+1;

Założenia dodatkowe
wait i signal to jedyne dozwolone operacje na semaforze
w szczególności zabronione jest testowanie wartości s i jej zmiana (z wyj. ustawienia początkowego)
operacje te są pierwotne – wykluczają się nawzajem; jeśli wywołane są równocześnie, zostaną wykonane jedna po drugiej (nie wiadomo w jakiej kolejności)
algorytm wyboru procesów wznawianych nie powinien powodować zagłodzenia żadnego z oczekujących procesów (cecha uczciwości)
„Praktyczna” definicja
semafora binarnego
Opuszczenie semafora (wait(s))
• jeżeli s=1, to s:=0
• jeśli s=0, to wstrzymaj proces wywołujący operację;
Podniesienie semafora (signal(s))
• jeżeli istnieją procesy wstrzymane przez opuszczony semafor s, to wznów jeden z nich
• jeśli nie, to s:=1;
Wzajemne wykluczanie
Program wykl_sem;
var s (*binarny*): semaphore
procedure p1;
begin
repeat
wait(s);
kryt1;
signal(s);
lok1;
forever
end;
... p2 analogicznie
begin (program główny)
s:=1;
cobegin
p1;p2;
coend
end.
Analiza modelu igloo
Podobne do rozwiązania ze zmienną-kluczem
Testowanie i zerowanie semafora w funkcji pierwotnej
wait(s) – brak problemów z blokowaniem się nawzajem.

Problem producenta-
konsumenta(1)
Konieczność zapewnienia producentowi miejsca na zapamiętanie danych do chwili ich skonsumowania przez konsumenta.
Wariant z buforem nieograniczonym
- semafor s jako licznik zliczający różnicę między ilością porcji włożonych do bufora, a pobranych z niego (s=in-out).
repeat
produkuj rekord v;
b[in]:=v;
in:=in+1;
forever
repeat
wait until in>out;
w:=b[out];
out:=out+1;
konsumuj rekord w;
forever
Modelowanie procesów
współbieżnych 12
Kod
Program pr-kon-sem;
var n: semaphore;
procedure producent;
begin
repeat
produkuj;
włóż; *
signal(n);
forever
end;
procedure konsument;
begin
repeat
wait(n);
pobierz; *
konsumuj;
forever
end;
begin (* program główny
*)
n:=0;
cobegin
producent;
konsument;
coend
end.
* włóż i pobierz – pewne
abstrakcyjne operacje na buforze

Modyfikacja rozwiązania
Założenie: instrukcje włóż i pobierz stanowią strefy krytyczne.
Konieczność użycia dwóch semaforów:
- ogólnego n (zlicza ilość elementów bufora)
- binarnego s dla uzyskania wzajemnego wykluczania operacji na buforze.

Modelowanie procesów
współbieżnych 14
Kod
Program pr-kon-sem;
var n: semaphore;
s: (*binary)
semaphore;
procedure producent;
begin
repeat
produkuj;
wait(s);
włóż;
signal(s);
signal(n);
forever
end;
procedure konsument;
begin
repeat
wait(n);
wait(s);
pobierz;
signal(s);
konsumuj;
forever
end;
begin (* program główny
*)
n:=0;
s:=1;
cobegin
producent;
konsument;
coend
end.

Modelowanie procesów
współbieżnych 15
Kod
procedure konsument;
begin
repeat
wait(s);
wait(n);
pobierz;
signal(s);
konsumuj;
forever
end;
Ważna kolejność operacji wait i signal dla poszczególnych semaforów (wartości zmiennych można testować tylko w instrukcjach wait, co może powodować zawieszenie niektórych procesów)
Przykładowo zmiana kolejności operacji wait w procedurze konsumenta może prowadzić do blokady systemu
(gdy konsument wykona procedurę przy n=0)

Problem producenta-
konsumenta(2)
Wariant z buforem ograniczonym:
- bufory cykliczne – indeksy tablicy obliczane modulo jej długość
- bufory zwielokrotnione – dwa podobne bufory, z których jeden jest aktualnie zapewniany przez programistę, a drugi opróżniany przez konsumenta
Rozwiązanie semaforowe:
- semafor ogólny n zlicza włożone do bufora elementy
- semafor ogólny e zlicza puste miejsca w buforze
- semafor binarny s zapewnia wzajemne wykluczanie

Modelowanie procesów
współbieżnych 17
Kod
Program pr-kon-ogr;
const rozmiarbufora=...;
var n: semaphore;
e: semaphore;
s: (*binary) semaphore;
procedure producent;
begin
repeat
produkuj;
wait(e);
wait(s);
włóż;
(*kryt*)
signal(s);
signal(n);
forever
end;
procedure konsument;
begin
repeat
wait(n);
wait(s);
pobierz; (*kryt*)
signal(s);
signal(e);
konsumuj;
forever
end;
begin (* program główny *)
n:=0;s:=1;e:=rozmiarbufora;
cobegin
producent;
konsument;
coend
end.
Rozszerzenia definicji(1)
Semafor dwustronnie ograniczony
- nie może przyjmować wartości ujemnych oraz nie może przekroczyć pewnej dodatniej wartości.
Symetria operacji podnoszenia i opuszczania:
jeżeli S=0 (S=N) to wstrzymaj działanie procesu wykonującego tę operację; jeśli nie, to jeśli są procesy wstrzymane w wyniku podnoszenia (opuszczania) semafora, to wznów jeden z nich, jeśli nie, to s:=s-1 (s:=s+1)
Klasyczny semafor w dowolnej interpretacji też jest ograniczony od dołu

Rozszerzenia definicji(2)
Semafor uogólniony
- wartość semafora może być zmieniana o dowolną wartość naturalną.
Operacja opuszczania (wait(s,n)):
jeżeli s>=n, to s:=s-n; w przeciwnym razie to wstrzymaj działanie procesu wykonującego tę operację;
Operacja podnoszenia (signal(s,n)):
jeśli są procesy wstrzymane w wyniku opuszczania semafora wait(s,m), to wznów jeden z nich i s:=s-m+n; jeśli nie, to s:=s+n

Zasadnicze cechy
semaforów
Eleganckie narzędzie synchronizacji
Słaba czytelność programów
Podatność na błędy – zmiana kolejności wykonywanych instrukcji może prowadzić do zawieszenia procesów, a także systemu operacyjnego.
Regiony krytyczne
Przemodelowanie operacji semaforowych w kierunku strukturalizacji.
Konieczność stworzenia instrukcji obejmującej sekcję krytyczną. Dla sekcji należy zapewnić wzajemne wykluczanie. Służy ona do wykonania operacji na pewnym zasobie (zmiennej); niedopuszczalne jest operowanie na zmiennej poza sekcją krytyczną.

Struktura regionu krytycznego
Zmienna dzielona – obiekt typu T, na którym są wykonywane operacje
wewnątrz sekcji krytycznej
var v: shared T;
Instrukcja regionu krytycznego – instrukcja strukturalna tworząca sekcję
krytyczną dla instrukcji I1,...,IN wiążąca ją ze zmienną v
region v do I1,...,IN end
Założenia:
wewnątrz związanych ze sobą regionów krytycznych może
pracować tylko jeden proces
skończony czas przebywania procesu w regionie
wejście do regionu musi być udostępnione dowolnemu procesowi
w skończonym czasie

Przykład – synchronizacja
dostępu do zasobów
var R: shared resource;
procedure pp;
begin
repeat
lok1;
region R do
request R;
hold(t);
release R;
end;
lok2;
forever
end;
procedure process(1..N)
pp;
end;
begin (* program główny *)
cobegin
process(1);
...
process(N);
coend
end.
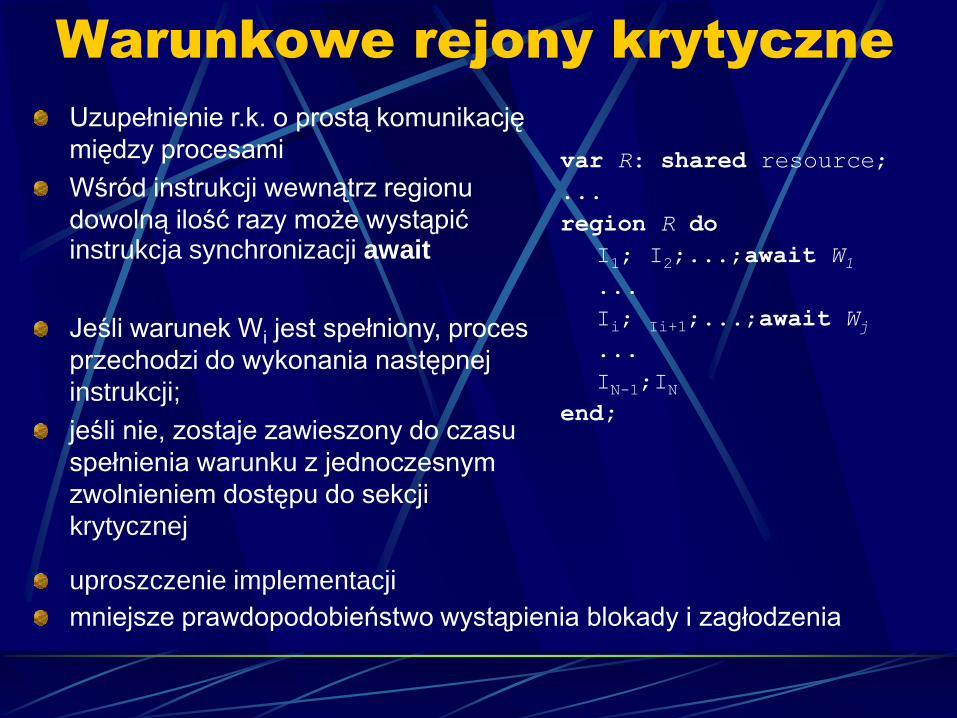
Warunkowe rejony krytyczne
var R: shared resource;
...
region R do
I1; I2;...;await W1
...
Ii; Ii+1;...;await Wj
...
IN-1;IN
end;
Uzupełnienie r.k. o prostą komunikację
między procesami
Wśród instrukcji wewnątrz regionu
dowolną ilość razy może wystąpić instrukcja synchronizacji await
Jeśli warunek Wi jest spełniony, proces
przechodzi do wykonania następnej
instrukcji;
jeśli nie, zostaje zawieszony do czasu
spełnienia warunku z jednoczesnym
zwolnieniem dostępu do sekcji
krytycznej
uproszczenie implementacji
mniejsze prawdopodobieństwo wystąpienia blokady i zagłodzenia

Monitory
Rozwinięcie (uogólnienie) mechanizmu regionów krytycznych
Zebrane w jednej konstrukcji programowej wyróżnione zmienne oraz
procedury i funkcje na nich operujące;
część procedur jest udostępniana na zewnątrz monitora – jest to
jedyny sposób dostępu do zmiennych monitora dla procesów
Wykonanie procedury monitora jest sekcją krytyczną wykonującego
go procesu
Możliwość wstrzymywania i wznawiania procesów wewnątrz
procedury monitorowej – zmienne typu condition, operacje
wait(c) – wstrzymanie procesu wykonującego operację i
wstawienie go na koniec kolejki związanej ze zmienną c (z
jednoczesnym zwolnieniem monitora)
signal(c) – wznowienie pierwszego procesu wstrzymanego w
kolejce związanej z c; jeżeli nie jest to ostatnia operacja
procedury monitorowej, proces wywołujący czeka na
zwolnienie monitora przez proces wznowiony (struktura stosu)
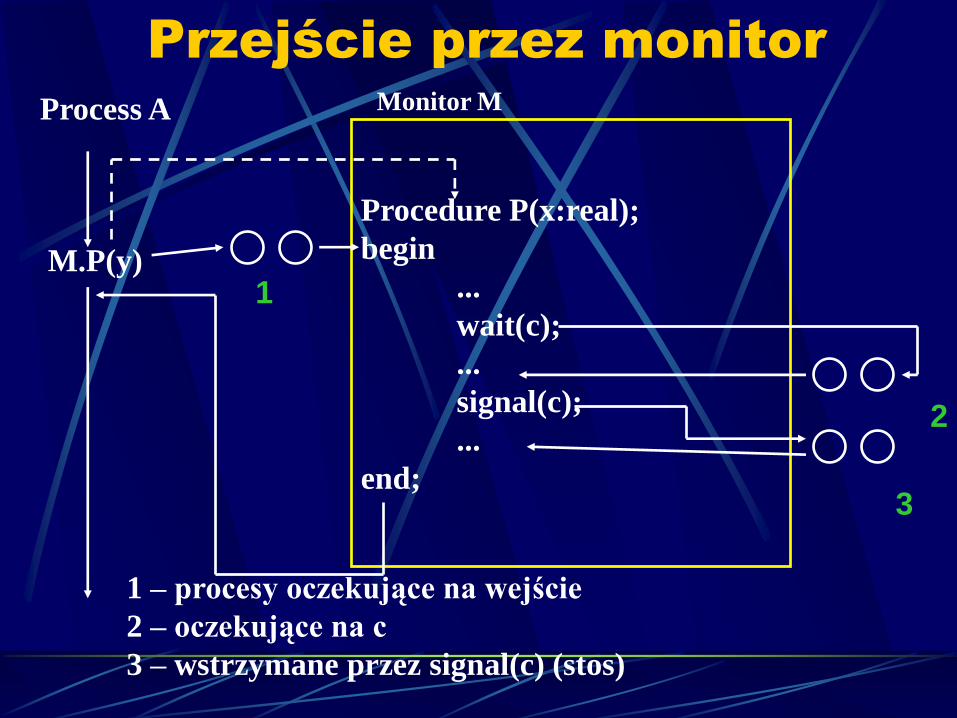
Przejście przez monitor
Procedure P(x:real);
begin
...
wait(c);
...
signal(c);
...
end;
M.P(y)
Process A Monitor M
1
2
3
1 – procesy oczekujące na wejście
2 – oczekujące na c
3 – wstrzymane przez signal(c) (stos)

Ograniczenia monitorów
Jeśli każdy z wstrzymanych procesów czekałby na inną wartość zmiennej c, dla każdej z tych wartości powinno się zaimplementować oddzielną kolejkę.
Rozwiązania:
- dynamiczna struktura „pamiętająca” potrzeby każdego z procesów
- dwie „podkolejki” – w pierwszej tylko jeden proces, wykorzystanie zmiennej pomocniczej przechowującej warunek żądany
- przerzucenie sprawdzania wartości monitora na procesy czekające – ginie kolejność wstrzymywanych procesów

Problem producenta i konsumenta
Program prodkons;
const rozmiarbufora=...;
monitor bufor;
b:array[0..rozmiarbufora] of integer;
in,out,n:integer;
procedure włóż(var v:integer)
begin
if n=rozmiarbufora+1 (*bufor pełny*)
then „czekaj aż nie będzie pełny”;
b[in]:=v;
in:=in+1;
if in=rozmiarbufora+1 then in:=0;
n:=n+1;
„zasygnalizuj, że bufor nie jest pusty”
end;
wait(n<rozmiarbufora)
signal(n!=0)

Kod monitora cd.
procedure pobierz(var v:integer)
begin
if n=0 (*bufor pusty*)
then „czekaj, aż nie będzie pusty”;
v:=b[out];
out:=out+1;
if out=rozmiarbufora+1 then out:=0;
n:=n-1;
„zasygnalizuj, że bufor nie jest pełny”;
end;
begin (*treść monitora*)
in:=0; out:=0; n:=0;
end;
wait(n!=0)
signal(n<rozmiarbufora)

Kod producenta i konsumenta
procedure producent;
var v:integer;
begin
repeat
produkuj(v);
włóż(v);
forever
end;
procedure konsument;
var v:integer;
begin
repeat
pobierz(v);
konsumuj(v);
forever
end;
begin (*program główny*)
cobegin
producent;
konsument;
coend
end.