equipos aereos teledecctecion
DESCRIPTION
IMAGENESTRANSCRIPT
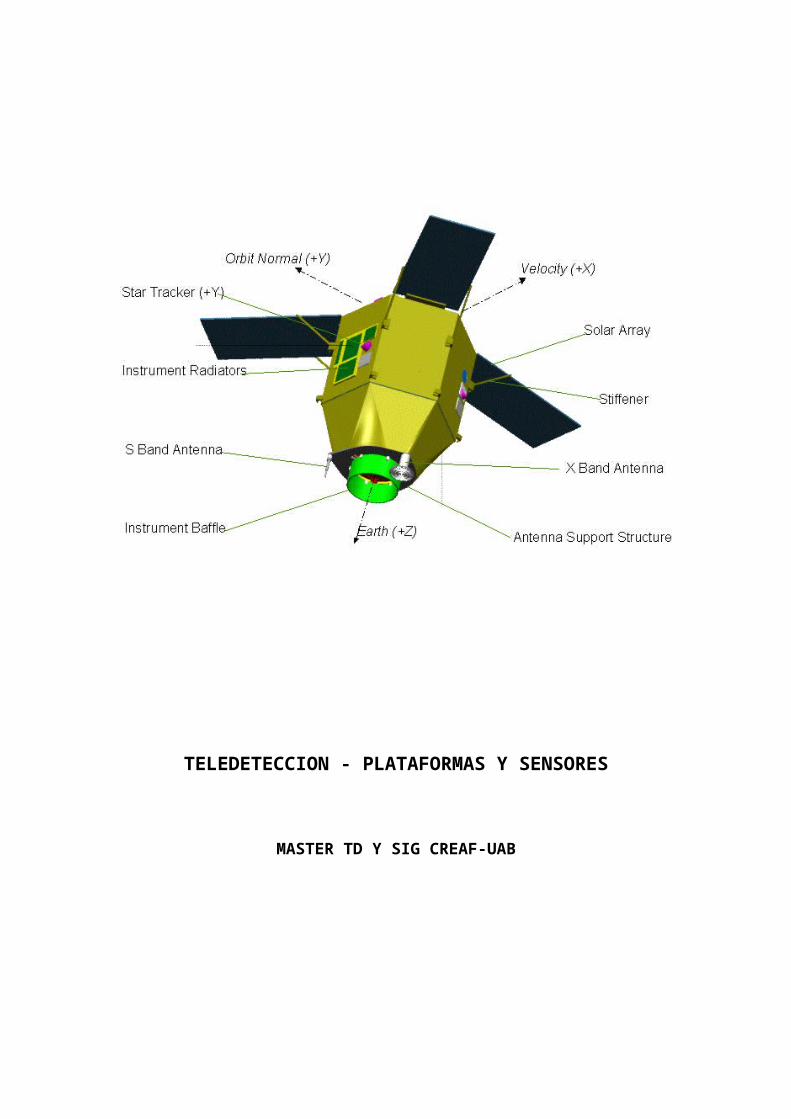
TELEDETECCION - PLATAFORMAS Y SENSORES
MASTER TD Y SIG CREAF-UAB
Eduardo de Miguel LlanesÁREA DE TELEDETECCION - INTA

TELEDETECCION: PLATAFORMAS Y SENSORES
TELEDETECCION, en sentido amplio, es la obtención de información acerca de una entidad física mediante un instrumento remoto.
Según Chuvieco (Fundamentos de teledetección espacial), "Teledetección es aquella técnica que permite adquirir imágenes de la superficie terrestre desde sensores instalados en plataformas aéreas o espaciales". Es en este sentido restringido en el que estudiaremos la teledetección en estas sesiones; aunque en rigor no deberíamos limitarrnos a la formación de imágenes, o a estudiar la superificie terrestre, la gran mayoría de la actividad en teledetección coincide con esta particular restricción. Para completar la acotación del término, habría que reseñar que la formación de imágenes se ha realizado registrando radiación electromagnética, excluyendo otras maneras de interaccionar a distancia (por ejemplo un SONAR).
Con esa definición en la mano, los elementos de un sistema de teledetección son: un instrumento sensible a la radiación electromagnética (opcionalmente, en unión con
un instrumento generador de energía electromagnética), una plataforma donde instalar a suficiente distancia del objeto observado el
instrumento, un centro de control del instrumento, un centro de recepción y archivo de los datos registrados por el instrumento
(opcionalmente, también destinado a procesarlos o al menos pre-procesarlos), un diseño experimental: un sistema de teledetección es más un "experimento" que
solamente un instrumento o técnica, en el sentido de que la frecuencia y distribución geográfica de la toma de datos son parte de la definición del sistema.
Estas sesiones se centran en conocer instrumentos y plataformas. Necesariamente conceptos sobre radiación electromagnética y sobre los demás elementos del sistema de teledetección estarán presentes.
EdM Plataformas "i" Sensores - 2
TELEDETECCION: PLATAFORMAS Y SENSORES
1.- PLATAFORMAS Las plataformas utilizadas en teledetección son aeronaves (plataformas aéreas) y satélites artificiales (plataformas espaciales). En los primeros podemos distinguir entre aeronaves tripuladas y no tripuladas. El uso de torres de observación, helicópteros, globos aerostáticos o tipo sonda etc, es marginal, aunque no descartable, y no se va a considerar en estos apuntes.
1.1.- Aeronaves
1.1.1.- GeneralidadesUna aeronave es una máquina capaz de moverse por la atmósfera merced a las reacciones del aire. En las aeronaves se distingue entre aerodinos y aerostatos. Los aerodinos vuelan siendo más pesado que el aire, gracias a fuerzas dinámicas que aparecen por su movimiento dentro del aire. Se opone por tanto a aerostato, un vehículo que vuela "estáticamente" al tener menos densidad específica que el aire. Es habitual también clasificar los aerodinos en aeronaves de ala rígida (o aeroplanos) y de ala rotatoria (o helicópteros). El término avión, que es el utilizado habitualmente, es un sinónimo "coloquial" de aeroplano.
El fundamento del vuelo de un aeroplano se resume en las siguientes observaciones.-el aire es un fluido con viscosidad despreciable.-todo fluido con viscosidad despreciable cumple, para flujo incomprsible (densidad "d" constante) una ecuación llamada de Bernoulli, por la cual la presión "p" y la velocidad "V" quedan ligadas: p + 1/2dV2 = K.-el avance de un objeto con una forma apropiada (forma aerodinámica, o "no roma") a través del fluido genera una velocidad relativa que se traduce en un patrón de presiones alrededor del objeto.-si la velocidad es suficientemente alta y la forma del objeto adecuada, el patrón de presiones puede ser tal que contrarreste la fuerza de la gravedad y eleve o sostenga al objeto frente a esta.
La consecuencia de esto es que un avión vuela por su velocidad frente al aire, lo que confirma un hecho intuitivo y en apariencia irrelevante pero clave para entender las limitaciones de la teledetección aeroportada: no es posible volar despacio ni girar arbitrariamente.
Los aviones operan a cotas entre 300 m y 20000 m sobre el nivel del mar. A partir de 4000m los aviones deben estar presurizados. En los aviones presurizados la instalación del sensor debe ser hermética bien respecto al interior de la aeronave bien respecto al exterior, y en ambos casos esto requiere soluciones técnicas diferentes a las necesarias para aviones de cota baja.
Los principales alicientes de las plataformas aéreas (frente a las espaciales) son: Alta resolución espacial: A = 2 H tan(/2) donde A es la longitud de la proyección del
ángulo instantáneo de visión (IFOV) sobre el terreno, H es la altura del instrumento respecto al suelo y el IFOV. Para un IFOV circular, A es el diámetro, y un lado para un IFOV cuadrado.
Mayor señal disponible, ya que aunque la radiancia (energía medida en w m-2 sr-1 ) es independiente de la distancia respecto al emisor, cuando H es menor el ángulo sólido que colectamos es mayor para obtener la misma A (ya que el ángulo sólido se define como Ω=S/R2 = A2/R2 para un IFOV cuadrado).
Flexibilidad de operación: fechas, horas, repeticiones, rumbo, área cubierta... pueden elegirse de acuerdo a los requisitos del usuario: aunque existan limitaciones (no todo es posible, desde luego) siempre son menores frente a la rigidez de operación de un satélite.
Banco de pruebas de sistemas en desarrollo, cuando producir un instrumento para satélite es posible pero se quiere experimentar algún aspecto.
Los principales inconvenientes son:
EdM Plataformas "i" Sensores - 3
TELEDETECCION: PLATAFORMAS Y SENSORES
Mala estabilidad de la plataforma al operar en medio de la zona más turbulenta de la atmósfera.
Poca cobertura espacial ya que el campo observado S depende de la altura de vuelo: S = 2 H tan(FOV/2)
Algunos aspectos prácticos: la determinación precisa de la trayectoria se consigue actualmente mediante sistemas
complejos (giróscopos, acelerómetros y GPS). En vuelos antiguos (anteriores a digamos mediados de los 90) esta tecnología no estaba tan avanzada como posteriormente, con lo que el trabajo con imágenes antiguas requiere frecuentemente el uso de métodos no paramétricos para una correcta georreferenciación.
la mayor parte de la interferencia de la atmósfera con las medidas de teledetección se produce en los primeros kilómetros de atmósfera (donde la presión es mayor y donde la masa de aerosoles y vapor de agua es mayor): por tanto, las medidas desde avión no escapan en absoluto a este problema. Una excepción notable es la capa de ozono en la estratosfera, responsable de una fuerte absorción alrededor de 9.5 micrómetros a la que escapan las imágenes aeroportadas.
forzosamente, las pasadas deben ser rectas. Cuando un avión gira se inclina sensiblemente; esto condiciona la realización de vuelos siguiendo fenómenos como ríos, costas etc.
la base de las nubes está frecuentemente por debajo de la altura de vuelo (excepto, claro está, de cirros y tipos similares).
las campañas de avión resultan caras y complejas de coordinar frente al más extendido y subvencionado uso del satélite.
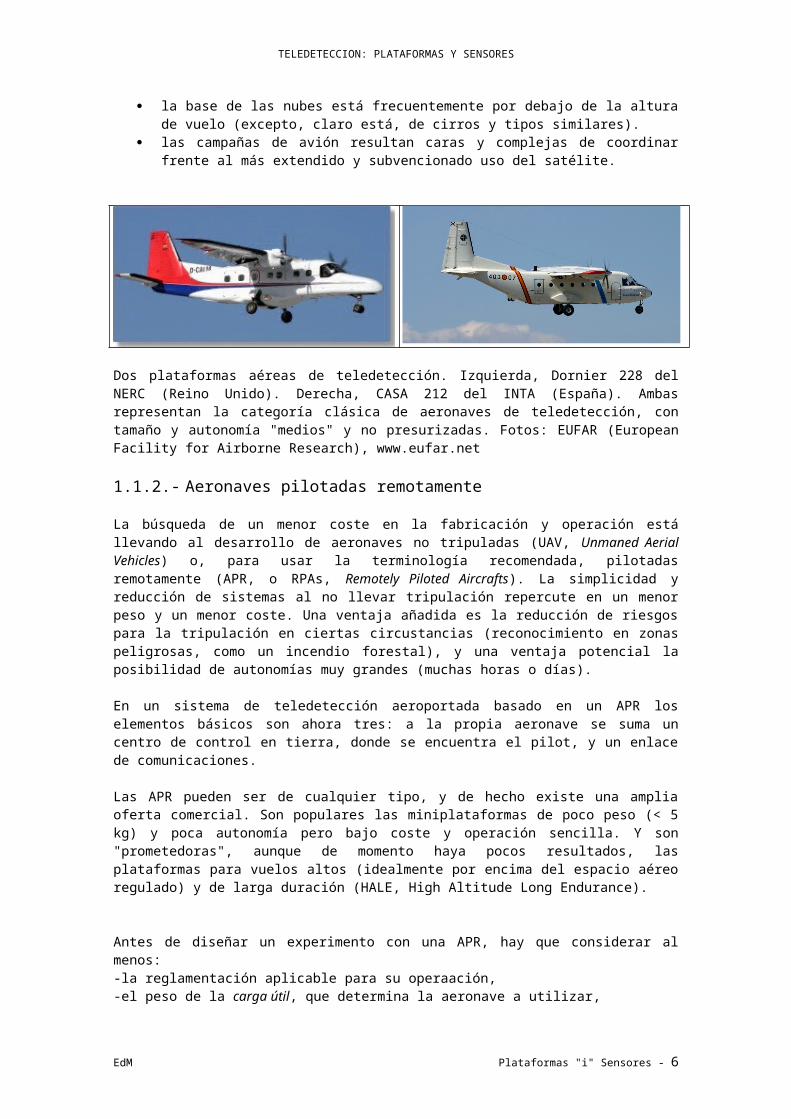
Dos plataformas aéreas de teledetección. Izquierda, Dornier 228 del NERC (Reino Unido). Derecha, CASA 212 del INTA (España). Ambas representan la categoría clásica de aeronaves de teledetección, con tamaño y autonomía "medios" y no presurizadas. Fotos: EUFAR (European Facility for Airborne Research), www.eufar.net
1.1.2.- Aeronaves pilotadas remotamente La búsqueda de un menor coste en la fabricación y operación está llevando al desarrollo de aeronaves no tripuladas (UAV, Unmaned Aerial Vehicles) o, para usar la terminología recomendada, pilotadas remotamente (APR, o RPAs, Remotely Piloted Aircrafts). La simplicidad y reducción de sistemas al no llevar tripulación repercute en un menor peso y un menor coste. Una ventaja añadida es la reducción de riesgos para la tripulación en ciertas circustancias (reconocimiento en zonas peligrosas, como un incendio forestal), y una ventaja potencial la posibilidad de autonomías muy grandes (muchas horas o días).
En un sistema de teledetección aeroportada basado en un APR los elementos básicos son ahora tres: a la propia aeronave se suma un centro de control en tierra, donde se encuentra el pilot, y un enlace de comunicaciones.
Las APR pueden ser de cualquier tipo, y de hecho existe una amplia oferta comercial. Son populares las miniplataformas de poco peso (< 5 kg) y poca autonomía pero bajo coste y operación sencilla. Y son "prometedoras", aunque de momento haya pocos resultados, las
EdM Plataformas "i" Sensores - 4
TELEDETECCION: PLATAFORMAS Y SENSORES
plataformas para vuelos altos (idealmente por encima del espacio aéreo regulado) y de larga duración (HALE, High Altitude Long Endurance).
Antes de diseñar un experimento con una APR, hay que considerar al menos:-la reglamentación aplicable para su operaación,-el peso de la carga útil, que determina la aeronave a utilizar, -la autonomía, que determina la cobertura geográfica accesible.
La reglamentación para la operación de ARP es actualmente (2014) provisional, y se publicó en el Real Decreto Ley 8/2014.
Algunos puntos destacados de esta reglamentación son:- Solo pueden operar de día y condiciones meteo visuales, fuera de zonas urbanas, a más de 8 km de aeropuertos, y en espacio aéreo no controlado- Deben disponer de identificación (modelo / nº de serie / empresa operadora)- El operador debe disponer de manuales de la aeronave, certificado de capacitación del piloto para esa aeronave, y seguro a terceros- Si el peso es mayor de 25 kg se necesita licencia de piloto de aeronaves y autorización para el vuelo de la Agencia Estatal de Seguridad Aérea.
Habitualmente, navegan con un autopiloto pero es manual el despegue y aterrizaje.
En principio, la problemática de la carga útil y las características del proceso de datos podría ser el mismo que para aeronaves pilotadas. Como anotaciones particulares:- problema con estabilidad/vibraciones si el peso es muy pequeño. Este problema es mayor, al igual que en aeronaves tripuladas, en aeronaves de ala rotatoria (helicópteros / multicópteros)- la necesidad de minimizar el peso de la instrumentación, lo que puede limitar las prestaciones de las imágenes obtenidas.
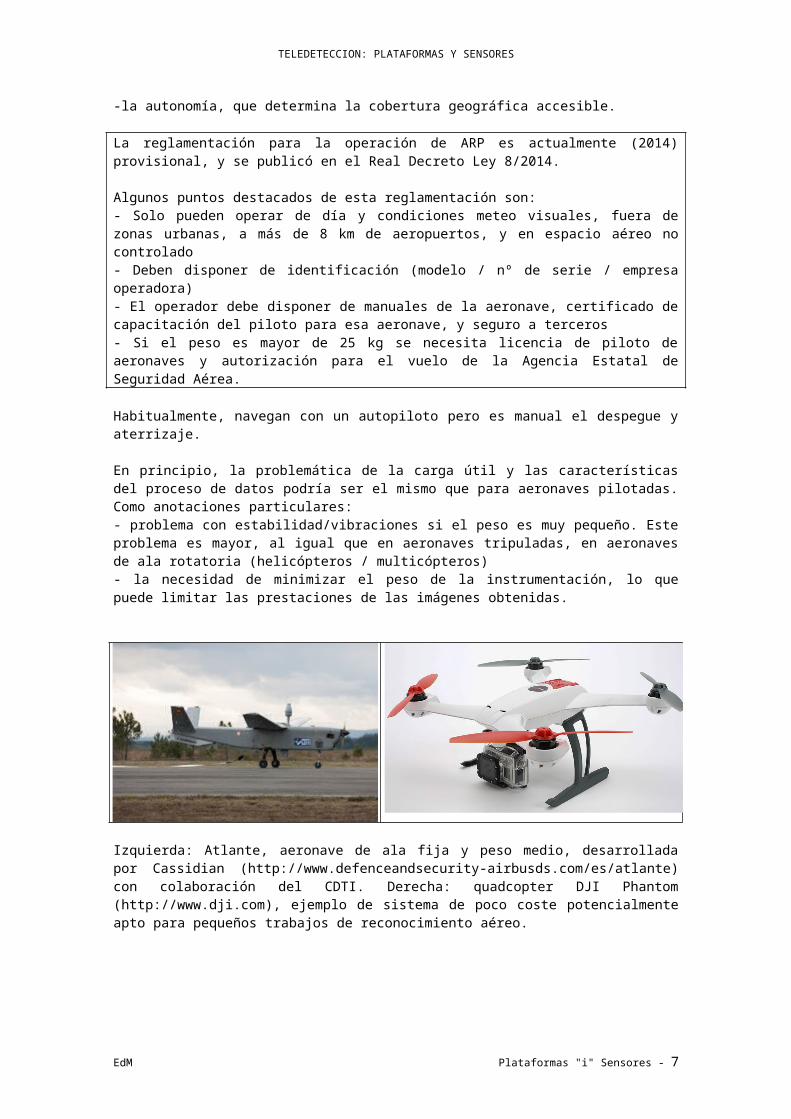
Izquierda: Atlante, aeronave de ala fija y peso medio, desarrollada por Cassidian (http://www.defenceandsecurity-airbusds.com/es/atlante) con colaboración del CDTI. Derecha: quadcopter DJI Phantom (http://www.dji.com), ejemplo de sistema de poco coste potencialmente apto para pequeños trabajos de reconocimiento aéreo.
EdM Plataformas "i" Sensores - 5
TELEDETECCION: PLATAFORMAS Y SENSORES
1.2.- Satélites
1.2.1.- GeneralidadesLos satélites artificiales operan en cotas superiores a unos 300 km. Por debajo de esta cota el rozamiento atmosférico dificulta en exceso la permanencia del satélite en órbita. Los satélites en órbitas más altas (hasta unos 900/1000 km) se ven afectados también por este rozamiento, pero bastan pequeñas maniobras correctoras para mantener la órbita deseada. En un mundo sin atmósfera (la Luna por ejemplo) uno puede imaginar un satélite en órbitas tan bajas como lo permita el relieve (y la energía disponible para darle la velocidad requerida).
Las ventajas e inconvenientes en relación con los aviones se deducen del punto anterior. Pero por encima de todo, hay que resaltar la enorme utilidad de disponer de una cobertura de datos de teledetección sobre toda la superficie de la Tierra que es sistemática, regular y fácilmente accesible a la comunidad investigadora.
En la jerga de la industria aeroespacial, un satélite es el segmento de vuelo (flight segment) de una misión, que tiene además un segmento tierra (ground segment). El segmento tierra se ocupa del control del satélite y de la recepción, proceso y archivo de sus datos. El segmento vuelo consta de una "nave" (spacecraft) y de los instrumentos que forman la carga útil o de pago de la misión (payload). Si pensamos en jerga científica, una misión de teledetección es un experimento, con su instrumentación, su diseño experimental (frecuencia de toma de datos, puntos de muestreo etc), su ejecución y, finalmente, el proceso de los datos.
1.2.2.- El entorno espacial
Para entender el diseño de satélites e instrumentos a bordo es necesario considerar las siguientes características del entorno espacial:
i. vacío, y su influencia térmica;ii. radiación electromagnética;iii. radiación por partículas;iv. micrometeoritos.
El vacío es responsable del llamado outgassing, (desgasificación quizás en castellano), es decir la liberación de moléculas gaseosas desde un material, que frecuentemente acaba (y ese es el problema) en su probable depósito en otro. El outgassing es un reto para el diseño de un instrumento espacial y puede ser causa de contaminación en la óptica y por tanto de degradación de la calidad del instrumento.
El vacío es también relevante por su influencia térmica. Ante la baja densidad de partículas por encima de 100 km el término temperatura no tiene sentido. Pero hay dos consideraciones térmicas clave:
los objetos iluminados por el sol (o en menor medida por la Tierra o la Luna) se calientan rápidamente ya que no hay refrigeración por convección,
la emisión natural de un cuerpo (ley de Planck) no tiene amortiguación alguna, y el enfriamiento de un cuerpo no iluminado por el sol (o en menor medida por la Tierra o la Luna) es por tanto casi ilimitado.
La radiación electromagnética proveniente del sol cubre el rango desde el muy energético UV lejano al infrarrojo medio. Ante la ausencia de atmósfera protectora, la radiación UV agrede a los materiales del satélite y hace necesario el uso de materiales adecuados.
La radiación por partículas es un problema serio en el espacio. El espacio está recorrido por partículas atómicas (fundamentalmente protones y electrones, pero también núcleos de helio y otras partículas) desplazándose a gran velocidad. La energía de tales partículas es muy alta, y su colisión con materia tiene un efecto considerable. Hay una alta concentración de estas partículas en los llamados cinturones de radiación de la Tierra (o cinturones de Van Allen). Han sido capturadas por el campo magnético de la Tierra y girán dentro de estos cinturones, que ocupan una franja aproximádamente entre 1000 y 20000 km de altura (con un límite bastante
EdM Plataformas "i" Sensores - 6
TELEDETECCION: PLATAFORMAS Y SENSORES
neto por debajo de 1000 km, mientras que hacia el espacio exterior la densidad decae suavemente). Estos cinturones de radiación son una región muy agresiva para los satélites. El flujo de partículas por debajo de los cinturones es mínimo.
1.2.3.- Subsistemas de un satélite
Un sensor instalado sobre un satélite debe funcionar sin intervención humana directa. Los diferentes servicios requeridos los proporcionan los diferentes sub-sistemas (consideramos el sistema principal al satélite en sí, incluso al conjunto del satélite más los elementos necesarios para su operación) de a bordo
ESTRUCTURA
El sub-sistema más básico es la estructura que soporta al instrumento ( y a los demás sub-sistemas). La estructura debe estar diseñada para evitar daños por vibración durante el lanzamiento, y debe estar supeditada al control térmico para prevenir deformaciones termoelásticas y calentamientos/enfriamientos. También debe proteger el detector de luz no deseada. Y, en la medida de lo posible, de la radiación por partículas. Sin embargo, los daños por radiación son casi inevitables: la protección contra radiación por partículas solo se puede conseguir con "muros" de material, con un impacto elevado en la masa del satélite. Así que lo mejor es evitar en lo posible transitar por los cinturones de radiación.
El diseño más habitual es un cilindro hueco que resiste las tensiones axiales (es decir a lo largo de su eje mayor) del lanzamiento, al que se adosan paneles que soportan los subsistemas y las cargas útiles.
Los materiales utilizados en la estructura vienen determinados por la necesidad de reducir al máximo la masa del satélite. Son habituales aleaciones muy ligeras y resinas reforzadas con fibrocarbono.
CONTROL TÉRMICO
La parte de un satélite que es iluminada por el sol se calienta mucho, la que mira al espacio se enfría espectacularmente por radiación. Y el calor generado por equipos electrónicos tiene que ser gestionado (disipado o conservado, según se quiera): de todos estos problemas se ocupa el control térmico.
El control térmico puede requerir un importante esfuerzo tanto en el diseño como en la operación del satélite, limitando las capacidades de la carga útil. Un ejemplo claro es la imposibilidad en misiones sencillas de enfriar activamente los detectores en la región del infrarojo medio y térmico (estos pueden requerir trabajar a 77 K), lo que restringe la temperatura a la que se puede bajar y por tanto la viabilidad de instrumentos térmicos en minisatélites.
CONTROL DE ACTITUD
El sub-sistema de control de actitud (Attitute and Orbit Control System, AOCS) es clave para garantizar el apuntamiento y la estabilidad del satélite y estos son aspectos que afectan a la geometría de las imágenes. En los satélites "de gama alta" se esperan errores muy bajos (por ejemplo <0.07º en MetOp, es decir aproximadamente el tamaño del IFOV del AVHRR) de manera que en principio el control de actitud es crítico solo en misiones de alta resolución espacial. En minisatélites y misiones "de gama baja" las limitaciones del AOCS puede tener un impacto notable en la localización y calidad de la imagen o, al menos, en el esfuerzo requerido para su georreferenciación.
Para conocer la orientación del satélite se usan giróscopos, "star trackers" y sistemas más bastos (earth-limb viewers, sun sensors) cuando no operan los sistemas finos. Para modificarla
EdM Plataformas "i" Sensores - 7
TELEDETECCION: PLATAFORMAS Y SENSORES
se utilizan, entre otras soluciones, pequeños propulsores con hidracina como combustible (thrusters) y ruedas de inercia (reaction wheels).
Un punto relevante dentro del control de actitud es la capacidad de maniobrar el satélite a velocidades altas, es decir del orden de 3º/s (muy superiores a las requeridas para maniobras orbitales convencionales). Esta capacidad se denomina agilidad del satélite (agility), y es la requerida para adquirir imágenes fuera del nadir. Ejemplos de satélite de observación de la Tierra ágiles son SPOT5 (solo across-track) o IKONOS (en todos los ejes).
POTENCIA
La potencia disponible está limitada a la que se puede generar mediante los paneles solares. Como todo recurso de un satélite, el consumo se ajusta al mínimo requerido por los instrumentos de a bordo, y la demanda de mayor potencia es siempre a costa de complejidad. En teledetección esto afecta especialmente a los sensores activos, como SAR y LIDAR, y a las transmisiones a Tierra de datos. También a los sistemas de refrigeración activos frecuentemente requeridos para enfriar detectores térmicos.
La generación de energía eléctrica se produce en los paneles solares, partiendo de los 1358 w/m2 que se reciben del sol en las cercanías de la Tierra. Es necesario mantener al menos la mayor parte del tiempo los paneles solares orientados hacia el sol; se usan baterías para acumulación de energía, para su uso en eclipses o periodos con mala iluminación de los paneles, pero actualmente es impensable operar nominalmente un satélite solo a base de baterías. Como consecuencia, por ejemplo, sería muy costosa la operación en la parte de sombra de una órbita heliosíncrona.
PROCESADOR/MEMORIAS
La informática de a bordo suele dar pobres prestaciones para lo que estamos acostumbrados. Existen limitaciones de almacenamiento, y de proceso. Los largos tiempos de desarrollo de una misión espacial (>5 años resulta imprescindible hoy día) más la necesidad de usar electrónicas cualificadas para espacio (tolerantes a radiación, fundamentalmente) sitúan normalmente a los procesadores y buses de satélites bastante por detrás de la vanguardia en tecnologías informáticas. Lo mismo ocurre con los dispositivos de almacenamiento (por ejemplo, MetOp puede almacenar 24 GB de datos, apenas algo más que los registrados durante una órbita. Y en el satélite Ingenio (¿lanzamiento 2016?) se ha previsto una memoria a bordo de 64 GB).
COMUNICACIONES
El funcionamiento del satélite requiere enviar comandos (“telecomando”) y recibir datos (“telemedida”). Esto se consigue mediante un contacto con ondas tipo radio. Para comandos y control se usa la banda S (2 a 4 GHz), y para el envío de datos la banda X (normalmente a 7.5 GHz); esta es más energética y por tanto tiene más capacidad de transmisión a costa de mayor complejidad y consumo. Por ejemplo, en el diseño de SEOSAT/Ingenio se ha considerado una transmisión a Tierra de datos imagen en banda X de 280 Mbps y de datos de estado del satélite en banda S de 2 Mbps.
El contacto puede ser continuo o esporádico, según la disponibilidad de estaciones en el terreno. El contacto continuo permite la operación en tiempo real. El contacto esporádico obliga a una menor flexibilidad, lo que resulta siempre en menor eficiencia en el uso del tiempo. Aun con contacto continuo, la seguridad del satélite obliga a incluir una serie de procedimientos automáticos que pueden resultar en apagados del satélite.
Por necesidades de mantenimiento, calibración, disponibilidad de las estaciones de tierra etc un satélite no genera imágenes el 100% del tiempo posible. El porcentaje es menor, y puede afectar de una manera sensible al usuario. A vecs la limitación del tiempo de observación viene dada por la comunciación en combinación con el almacenamiento (por ejemplo en ASTER).Valores típicos de transmisión de datos a tierra en misiones actuales son 100 a 500 Mbps. Por ejemplo, Sentinel-2, con lanzamiento en 2014, preve 512 Mbps. Como es lógico, los satélites
EdM Plataformas "i" Sensores - 8
TELEDETECCION: PLATAFORMAS Y SENSORES
de teledetección (al transmitir imágenes) son los más exigentes del sector espacial en este campo.
LANZADOR
El lanzamiento es una parte complicada y cara de toda misión espacial.
Actualmente, solo es posible vencer la gravedad de la Tierra usando propulsantes químicos.
Algunas consideraciones de interés:-La mayoría de los lanzadores solo consiguen llevar al satélite que lanzan hasta 250/300 km de altura. A partir de ahí, es el propio satélite quien, consumiendo parte de su combustible, se impulsa hasta la órbita definitiva. Este proceso no es inmediato, ya que para optimizar el combustible requerido se diseñan maniobras que no son necesariamente el paso directa a la órbita definitiva.-La posición y velocidad del satélite en el momento de ser liberado de la "cofia" del lanzador no es predecible con gran exactitud. Por tanto no es posible predecir cuánto combustible necesitará para alcanzar su órbita definitiva. Aquí empieza la cadena de hechos que hacen que sea difícil pronosticar la vida útil de un satélite.-La órbita y el peso y tamaño del satélite condicionan el lanzador a elegir. La constante lucha tecnológica por un menor peso y tamaño de los satélites es en gran parte derivada del impacto de estos factores en el coste de lanzamiento-El coste de lanzamiento es una parte significativa del coste total de una misión. Como aproximación se puede considerar que el coste promedio de un lanzamiento es 20 K€ / kg satélite para satélites en órbitas bajas.-El porcentaje de aciertos global está alrededor del 90%. Pero entre los lanzamientos "acertados" incluímos los que sufren retrasos antes del "acierto", que también llevan un coste altísimo asociado.
1.2.4.- Órbitas espaciales
La posibilidad de poner un instrumento a dar vueltas en torno a la Tierra por encima de su atmósfera queda justificada por la rama de la física que llamamos mecánica clásica. Las expresiones que modelizan esta situación se conocen por tanto desde hace mucho tiempo. En su forma más general, y simplificando el problema (asumiendo que la Tierra es esférica y con masa homogénea, que el satélite tiene una masa despreciable, que la atracción de la luna o el sol y el efecto del rozamiento atmosférico son despreciables), la ecuación de una órbita proviene de igualar la aceleración de la gravedad y la centrífuga, es decir:
GM/r2 + d2r/dt2 = 0
r es el vector posición del satélite, G la constante de gravitación universal y M la masa de la Tierra (G M = 3.986005 1014 m3 s-2 ).
La ecuación diferencial anterior tiene diferentes soluciones, pero todas ellas son cónicas. Para el caso de elipses (y circunferencias, como caso particular de la elipse), un cuerpo lanzado horizontalmente a una altura h desde la Tierra se convertirá en un satélite artificial si su velocidad en cada punto es:
V = sqrt[ 2 GM/r - GM/a]
donde a es el semieje mayor de la elipse.
Cuando la velocidad es constante a lo largo de la órbita esta es circular; en otro caso, serán elípticas, parabólica o hiperbólicas.
EdM Plataformas "i" Sensores - 9
TELEDETECCION: PLATAFORMAS Y SENSORES
Para órbitas circulares:
V = sqrt [G M (RT + h)-1 ]
donde RT el radio ecuatorial de la Tierra (6378 km).
Hay que destacar que aun siendo circulares, las órbitas quedan afectadas por el diferente radio de la Tierra entre el ecuador y los polos (20 km aprox.), lo que implica p.e. un 2.5% de diferencia en la distancia Tierra-superficie para h=800 km.
El periodo de una órbita circular viene dado por 2(RT + h) / V (confirmando la tercera ley de Kepler), siendo en resumen:
T = 1.659 10-4 (RT + h)3/2 (RT y h en kilómetros, T en minutos)
La velocidad típica en misiones de observación de la Tierra en órbitas heliosíncronas es 7.5 km/s, con un periodo de 100 minutos; más abajo se verá por qué.
EdM Plataformas "i" Sensores - 10
TELEDETECCION: PLATAFORMAS Y SENSORES
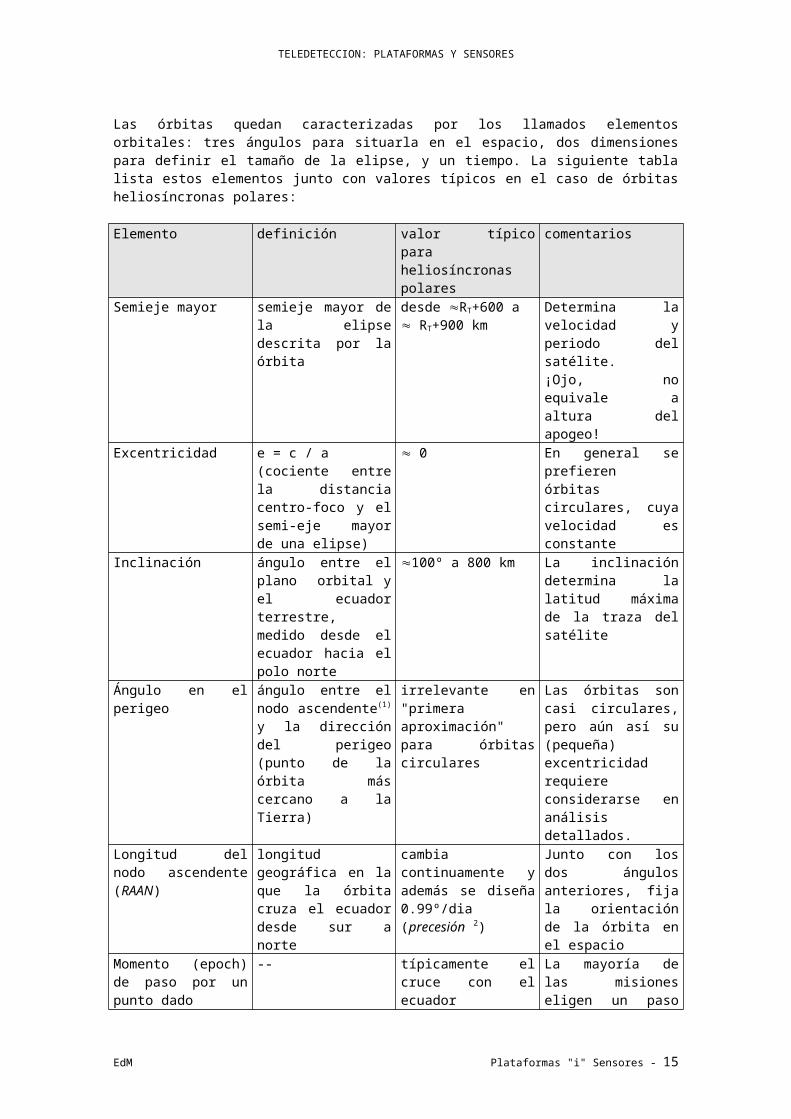
Las órbitas quedan caracterizadas por los llamados elementos orbitales: tres ángulos para situarla en el espacio, dos dimensiones para definir el tamaño de la elipse, y un tiempo. La siguiente tabla lista estos elementos junto con valores típicos en el caso de órbitas heliosíncronas polares:
Elemento definición valor típico para heliosíncronas polares
comentarios
Semieje mayor semieje mayor de la elipse descrita por la órbita
desde RT+600 a RT+900 km
Determina la velocidad y periodo del satélite.¡Ojo, no equivale a altura del apogeo!
Excentricidad e = c / a (cociente entre la distancia centro-foco y el semi-eje mayor de una elipse)
0 En general se prefieren órbitas circulares, cuya velocidad es constante
Inclinación ángulo entre el plano orbital y el ecuador terrestre, medido desde el ecuador hacia el polo norte
100º a 800 km La inclinación determina la latitud máxima de la traza del satélite
Ángulo en el perigeo ángulo entre el nodo ascendente(1) y la dirección del perigeo (punto de la órbita más cercano a la Tierra)
irrelevante en "primera aproximación" para órbitas circulares
Las órbitas son casi circulares, pero aún así su (pequeña) excentricidad requiere considerarse en análisis detallados.
Longitud del nodo ascendente (RAAN)
longitud geográfica en la que la órbita cruza el ecuador desde sur a norte
cambia continuamente y además se diseña 0.99º/dia (precesión 2)
Junto con los dos ángulos anteriores, fija la orientación de la órbita en el espacio
Momento (epoch) de paso por un punto dado
-- típicamente el cruce con el ecuador
La mayoría de las misiones eligen un paso entre 9 y 11 hora solar local, pero no es la única solución posible
(1) Toda órbita cruza el ecuador dos veces, una de sur a norte y otra de norte a sur. Estos cruces se llaman nodos, y se habla de nodo ascendente o descendente respectivamente.
(2) La precesión es el cambio de la dirección del eje alrededor del cual gira un objeto. El ejemplo tipo, el movimiento que realiza una peonza, o trompo, al girar, cuando su eje de rotación no es vertical. La precesión (~cambio) de la longitud del nodo ascendente (ΔLNA) de una órbita ardedor de la Tierra es: ΔLNA (grados/día) = -2,06474·1014 ·a-7/2 ·cos(i)·(1-e2)-2
Donde:e = excentricidad de la órbita (0 en órbitas circulares)i = inclinación de la órbitaa = semieje mayor de la órbita, en km
La clasificación clásica de las órbitas es según su altura respecto a la superficie de la Tierra:1) Bajas o LEO (Low Earth Orbit), por debajo de 1000 km,2) Medias o MEO (Medium Earth Orbit), hasta 36000 km,3) Geosíncronas o GEO,4) HEO (Highly Elliptical Orbit).
EdM Plataformas "i" Sensores - 11
TELEDETECCION: PLATAFORMAS Y SENSORES
Las clásicas en teledetección son LEO heliosíncronas y geoestacionarias.
Las órbitas LEO heliosíncronas aprovechan la existencia de unaprecesión del plano orbital debida al llamado 2º potencial terrestre (es decir, el coeficiente J2 del desarrollo de Legendre del campo potencial gravitatorio terrestre). Esta precesión es cercana a 1º/día a 750 km de altitud. Debido a ella, el plano orbital va girando a lo largo del año, de manera que el "canto" de la órbita siempre mira al sol: a esta propiedad se refiere el nombre de heliosíncronas. Si además la inclinación es cercana a 90º, la órbita es polar, es decir, va de polo a polo y por tanto cubre todas las latitudes terrestres. Como el valor de la precesión es único para una inclinación a cada altura, la altura y la inclinación están ligadas en las órbitas heliosíncronas.
La relación unívoca altura-velocidad orbital hace que en el entorno de 750 km, como queda dicho, la velocidad sea del orden de 7.5 km/s y el periodo sea cercano a 100 minutos. Por tanto, debido a la rotación de la Tierra bajo el satélite, la traza sobre la superficie varía de órbita a órbita. De acuerdo a los valores específicos de altura e inclinación estas trazas cubrirán toda la superficie terrestre (proporcionando cobertura global, o casi, tanto en latitud como en longitud) o franjas discontinuas en longitud.
En las órbitas geosíncronas, el periodo orbital se iguala al de rotación de la Tierra. Si además la órbita es circular y su inclinación es 0º (es decir el plano orbital es ecuatorial), el satélite en órbita parece fijo desde la Tierra. Entonces la órbita se llama geoestacionaria, y es la utilizada por ejemplo en Meteosat (y en gran cantidad de satélites de comunicaciones). En este caso, la traza es un punto, pero la gran distancia entre el satélite y la superficie terrestre permite que aquel observe fácilmente casi un hemisferio terrestre completo.
En las órbitas MEO destacan las ocupadas por los satélites de los sistemas de navegación por satélite (como el estadounidense GPS). Estos orbitan a alrededor de 20.000 km sobre la superfiice (en zonas donde la radiación por partículas es considerable aunque no tan grave como en otras alturas MEO), en órbitas circulares de inclinación alrededor de 55º, distribuidas en una serie de planos (6 en el sistema GPS) para optimizar el número de satélites visibles desde el terreno desde casi cualquier punto de la superficie.
Traza y ciclo de repetición.
La traza es la proyección del satélite sobre la superficie de la Tierra a lo largo del tiempo. La traza de las órbitas LEO heliosíncronas es ligeramente westward pese a que su inclinación (≈100º) es retrógrada (es decir contraria a la rotación de la Tierra). La traza de un satélite geoestacionario ideal es un punto correspondiente a su "posición" en latitud o longitud. En realidad, hay pequeñas desviaciones sobre esa posición que deben controlarse durante el mantenimiento de la órbita (station-keeping).
El ciclo de repetición es el número de días que tarda la órbita en dibujar la misma traza sobre la superficie de la Tierra. El ciclo de repetición solo depende de la altura. Es frecuente expresar este ciclo en la expresión:
Tn + D/CR
Por ejemplo, 14+32/49 para el futuro satélite español Ingenio. En esa expresión, Tn es T/Ts, es decir el periodo sidéreo de rotación terrestre (86164 segundos) divivido por el del satélite, y nos indica el número de órbitas completas en un día. D es la deriva, o número de trazas que "avanza" el satélite en un ciclo respecto a un día completo, y CR el ciclo de repetición en días (hay que señalar que para obtener D y CR a partir de la altura hace falta un algoritmo específico).
EdM Plataformas "i" Sensores - 12
TELEDETECCION: PLATAFORMAS Y SENSORES
Las órbitas de los satélites de observación de la Tierra sufren perturbaciones por diferentes razones: presión solar, atracción lunar, rozamiento por moléculas atmosféricas, no-homogeneidad de la distribución de la masa terrestre... Mediante maniobras correctoras, se mantienen con una precisión elevada: p.e. para ENVISAT la órbita se mantiene 1 km respecto a la traza sobre el terreno y 1 minuto de paso por el nodo ascendente. El mantenimiento de la órbita requiere la realización regular de maniobras, que restan tiempo de observación, y el consumo de combustible, que es un recurso finito (y minimizado buscando la menor masa posible para el satélite) y habitualmente limita la vida útil de un satélite.
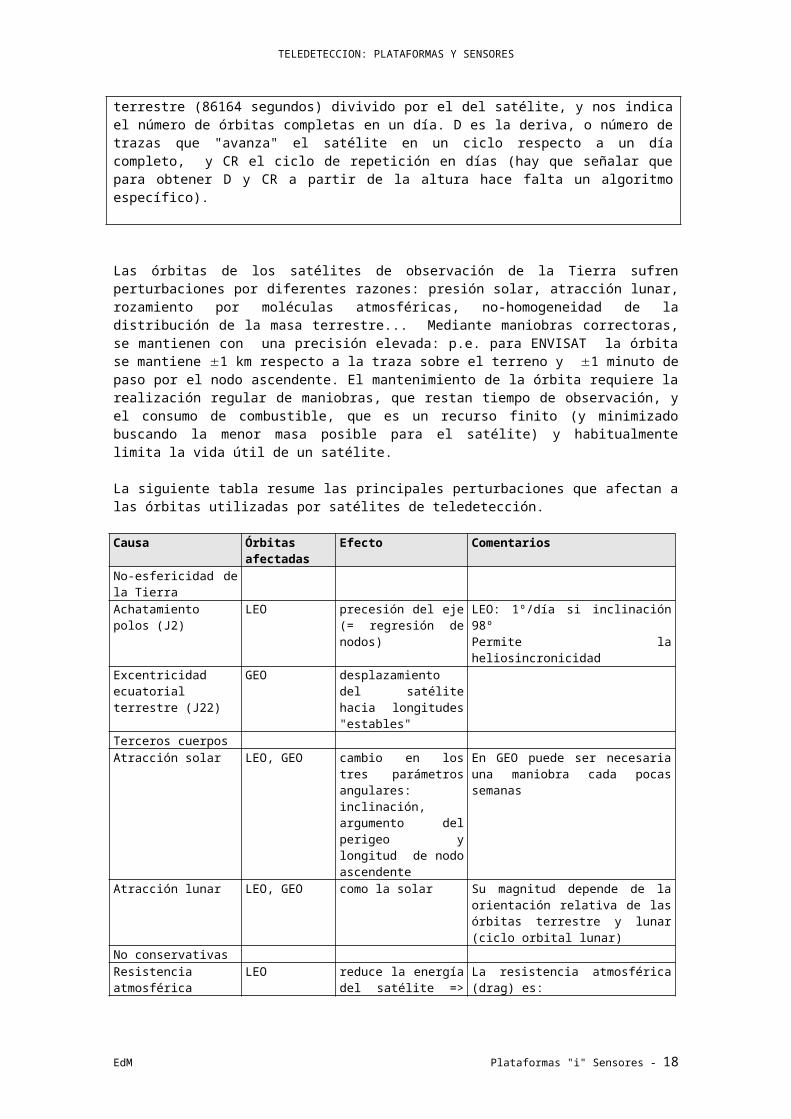
La siguiente tabla resume las principales perturbaciones que afectan a las órbitas utilizadas por satélites de teledetección.
Causa Órbitas afectadas
Efecto Comentarios
No-esfericidad de la TierraAchatamiento polos (J2)
LEO precesión del eje (= regresión de nodos)
LEO: 1º/día si inclinación 98ºPermite la heliosincronicidad
Excentricidad ecuatorial terrestre (J22)
GEO desplazamiento del satélite hacia longitudes "estables"
Terceros cuerposAtracción solar LEO, GEO cambio en los tres
parámetros angulares: inclinación, argumento del perigeo y longitud de nodo ascendente
En GEO puede ser necesaria una maniobra cada pocas semanas
Atracción lunar LEO, GEO como la solar Su magnitud depende de la orientación relativa de las órbitas terrestre y lunar (ciclo orbital lunar)
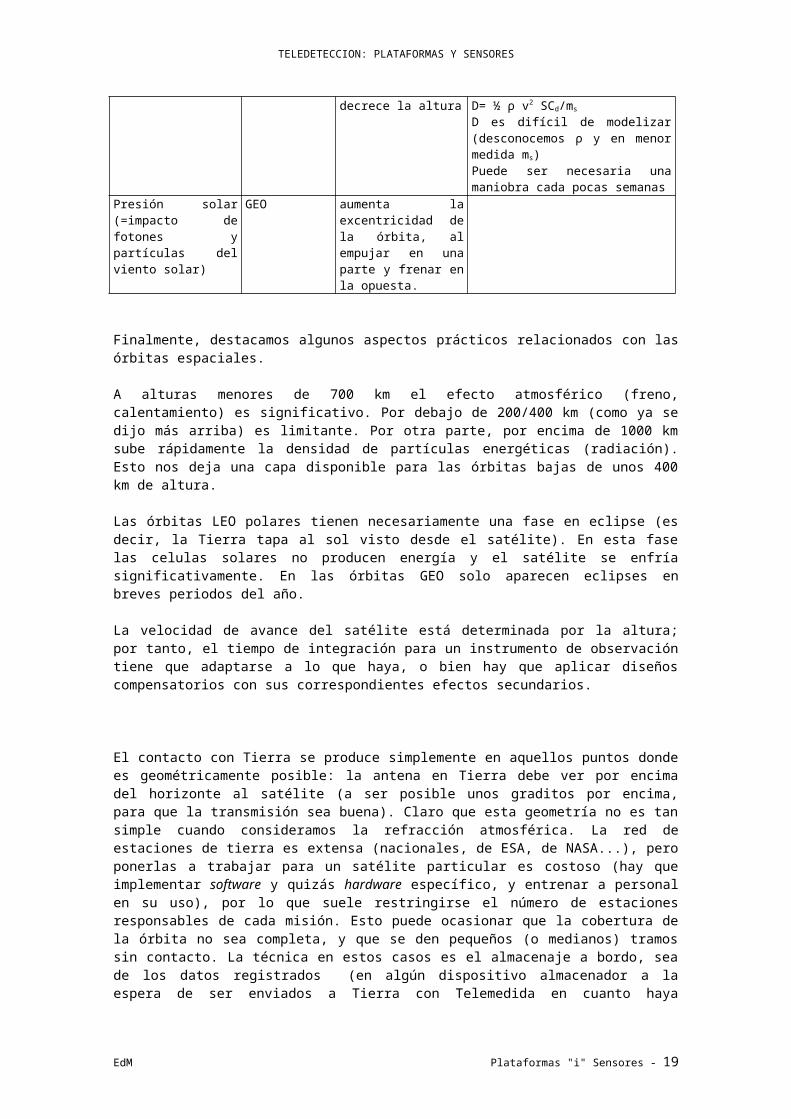
No conservativasResistencia atmosférica
LEO reduce la energía del satélite => decrece la altura
La resistencia atmosférica (drag) es:D= ½ ρ v2 SCd/ms
D es difícil de modelizar (desconocemos ρ y en menor medida ms)Puede ser necesaria una maniobra cada pocas semanas
Presión solar (=impacto de fotones y partículas del viento solar)
GEO aumenta la excentricidad de la órbita, al empujar en una parte y frenar en la opuesta.
Finalmente, destacamos algunos aspectos prácticos relacionados con las órbitas espaciales.
A alturas menores de 700 km el efecto atmosférico (freno, calentamiento) es significativo. Por debajo de 200/400 km (como ya se dijo más arriba) es limitante. Por otra parte, por encima de 1000 km sube rápidamente la densidad de partículas energéticas (radiación). Esto nos deja una capa disponible para las órbitas bajas de unos 400 km de altura.
Las órbitas LEO polares tienen necesariamente una fase en eclipse (es decir, la Tierra tapa al sol visto desde el satélite). En esta fase las celulas solares no producen energía y el satélite se enfría significativamente. En las órbitas GEO solo aparecen eclipses en breves periodos del año.
La velocidad de avance del satélite está determinada por la altura; por tanto, el tiempo de integración para un instrumento de observación tiene que adaptarse a lo que haya, o bien hay que aplicar diseños compensatorios con sus correspondientes efectos secundarios.
EdM Plataformas "i" Sensores - 13
TELEDETECCION: PLATAFORMAS Y SENSORES
El contacto con Tierra se produce simplemente en aquellos puntos donde es geométricamente posible: la antena en Tierra debe ver por encima del horizonte al satélite (a ser posible unos graditos por encima, para que la transmisión sea buena). Claro que esta geometría no es tan simple cuando consideramos la refracción atmosférica. La red de estaciones de tierra es extensa (nacionales, de ESA, de NASA...), pero ponerlas a trabajar para un satélite particular es costoso (hay que implementar software y quizás hardware específico, y entrenar a personal en su uso), por lo que suele restringirse el número de estaciones responsables de cada misión. Esto puede ocasionar que la cobertura de la órbita no sea completa, y que se den pequeños (o medianos) tramos sin contacto. La técnica en estos casos es el almacenaje a bordo, sea de los datos registrados (en algún dispositivo almacenador a la espera de ser enviados a Tierra con Telemedida en cuanto haya contacto) o de las órdenes (llegadas en forma de Telecomando, y que se almacenan con una etiqueta de tiempo y se ejecutan automáticamente al llegar su hora). El coste principal está desde luego en la parte de los datos, ya que hay que incluir en el satélite la necesaria memoria masiva y posteriormente un canal de comunicación con un apreciable ancho de banda (según la jerga de las telecomunicaciones). Por supuesto los avances tecnológicos hacen que cada misión incremente sus capacidades en ambos sentidos, pero mientras tanto los usuarios van incrementando igualmente sus requisitos de datos (mayor número de pixels, más canales, más bits por pixel...).
La vida útil de un satélite está limitada habitualmente por el agotamiento de su combustible, y por tanto depende de la cantidad de maniobras que debe hacer para mantener su órbita (sea por razones rutinarias o excepcionales). Pero muchos sub-sistemas, incluyendo la propia carga útil, pueden degradarse con el tiempo de manera que hagan inservible la misión, debido a la agresividad del entorno espacial (principalmente por la alta radiación y el stress térmico). La vida útil típica de una misión de observación de la Tierra es de unos 5 años, y no es fácil prolongarla.
Dos satélites de observación de la Tierra. Izquierda ENVISAT, derecha MetOp-B. Fotos: ESA multimedia gallery (www.esa.int).
EdM Plataformas "i" Sensores - 14
TELEDETECCION: PLATAFORMAS Y SENSORES
2.- SENSORES
2.1.- GeneralidadesUn instrumento de teledetección es un radiómetro que, habitualmente, forma imágenes. La muy genérica y poco descriptiva palabra sensor está bastante extendida en el campo de la teledetección para referirse a estos instrumentos.
En la región óptica del espectro electromagnético, los "sensores" son telescopios ópticos con un sistema electrónico en el plano detector. En la región espectral de las microondas, los sensores son antenas. Otras regiones del espectro, como rayos X o gamma, tienen un interés muy marginal en la teledetección de recursos naturales, y no veremos aquí las complicadas técnicas que permiten formar imágenes con tales radiaciones.
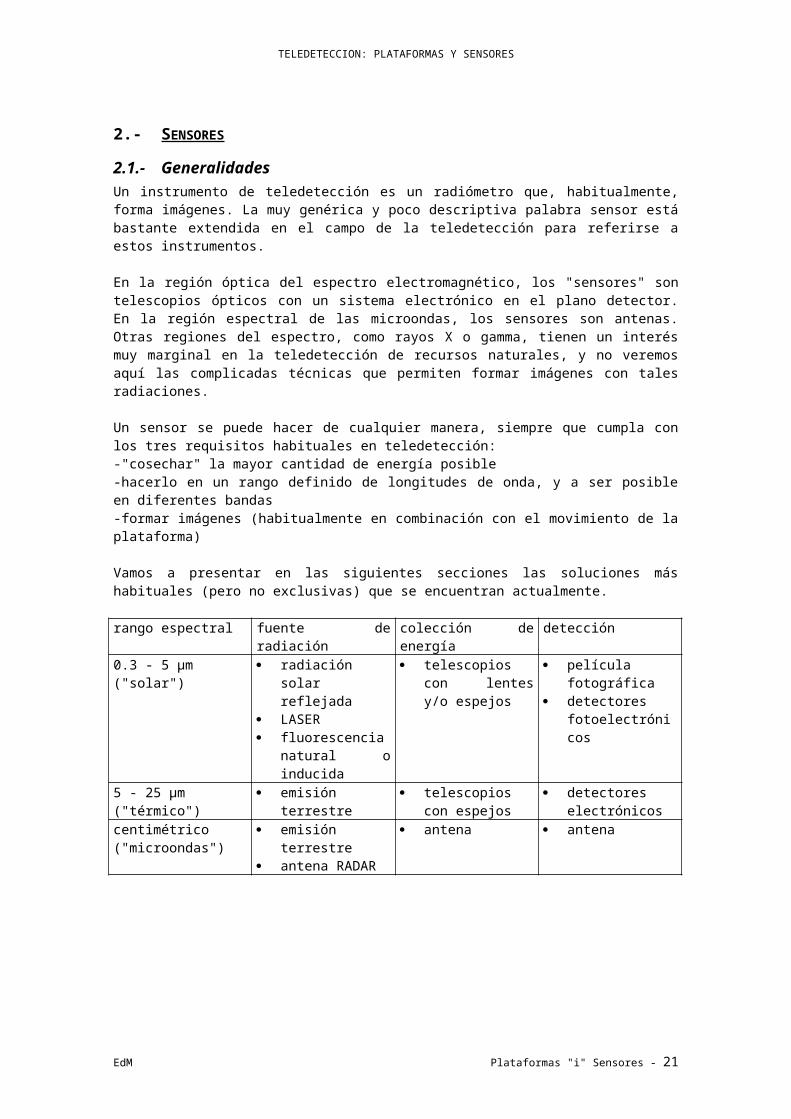
Un sensor se puede hacer de cualquier manera, siempre que cumpla con los tres requisitos habituales en teledetección:-"cosechar" la mayor cantidad de energía posible-hacerlo en un rango definido de longitudes de onda, y a ser posible en diferentes bandas -formar imágenes (habitualmente en combinación con el movimiento de la plataforma)
Vamos a presentar en las siguientes secciones las soluciones más habituales (pero no exclusivas) que se encuentran actualmente.
rango espectral fuente de radiación colección de energía detección0.3 - 5 µm("solar")
radiación solar reflejada
LASER fluorescencia
natural o inducida
telescopios con lentes y/o espejos
película fotográfica
detectores fotoelectrónicos
5 - 25 µm("térmico")
emisión terrestre telescopios con espejos
detectores electrónicos
centimétrico("microondas")
emisión terrestre antena RADAR
antena antena
EdM Plataformas "i" Sensores - 15

TELEDETECCION: PLATAFORMAS Y SENSORES
2.2.- Telescopios
La realidad está desenfocada. Aunque no nos parezca así a nosotros, que la percibimos a través de unos instrumentos focalizadores (llamados ojos), la radiación electromagnética que emite o refleja una superficie se propaga típicamente en todas las direcciones, por lo que en cualquier punto del espacio tenemos fotones (o rayos en la interpretación de la óptica geométrica clásica) que provienen de multitud de superficies.
Afortunadamente, cada fotón/rayo tiene una dirección de propagación particular, unívoca en primera aproximación. Esa dirección cambia al cambiar el medio en que se propaga la radiación, cambio que queda determinado por la ley de Snell (y el principio de Fermat...):
n1 sen1 = n2 sen2
Donde ni es el índice de refracción del medio "i" (aire y vidrio serán habitualmente los dos medios en un sensor) y i el ángulo de la radiación (es decir de la normal al frente de ondas) con la normal a la superficie límite entre ambos medios. Esta relación nos permite anticipar que eligiendo la superficie y el material apropiados podríamos dirigir todos los rayos que provienen de un punto en el "mundo objeto" a otro punto en el "mundo imagen"; puede incluso conseguirse que casi todos los puntos se formen en un plano del mundo imagen, al que llamaremos plano focal. Así tendríamos una imagen enfocada de la realidad. Esto puede conseguirse, aunque solo para una parte de los rayos que provienen del punto (con todos es inviable), mediante espejos, lentes o una combinación de ambos,
En resumen, la parte principal de un sensor óptico es un sistema de enfoque. Pero, además, normalmente queremos recoger la máxima cantidad de radiación de cada punto/objeto enfocado: si no, nos veríamos en la necesidad de largas exposiciones, como las requeridas en las cámaras estenopeicas. Por tanto, el sistema de enfoque es también un sistema de agrupación de rayos del mayor ángulo sólido posible desde el punto observado.
Intercalado en el sistema de enfoque (o tras él) el telescopio puede incluir un sistema para dispersar la radiación, de manera que diferentes longitudes de onda sean dirigidos a diferentes planos focales o diferentes posiciones en el mismo plano focal. Frecuentemente se denomina óptica secundaria a estos elementos ópticos destinados a la separación espectral de la radiación (y a veces su posterior enfoque, si vuelve a ser necesario).
Finalmente, el telescopio requiere un dispositivo situado en el plano focal que registre la radiación. Este dispositivo es el ojo en un telescopio tradicional, y fue una película fotográfica durante muchos años. En la teledetección actual, se trata de un detector fotoelectrónico, donde los fotones incidentes causan una corriente cuantificable.
Lo anterior sirve para explicar cómo generar una imagen estática con un telescopio. Pero en la "observación de la Tierra" debemos recorrer la superficie. La manera de hacerlo condiciona totalmente el diseño del telescopio. Los diseños más habituales en observación de la Tierra son los sensores de barrido (linescanners o whiskbroom) y los sensores de empuje (pushbroom).
Linescanners Pushbrooms un solo detector por banda manejable extensión al TIR poco tiempo de integración disponible calibración manejable fácil obtener un FOV extenso caros, complejos
un detector por pixel VNIR ++, SWIR +, TIR -- más tiempo de integración disponible calibración problemática difícil alcanzar un FOV extenso por la óptica y por el conjunto detector. menos caros, más sencillos
EdM Plataformas "i" Sensores - 16
TELEDETECCION: PLATAFORMAS Y SENSORES
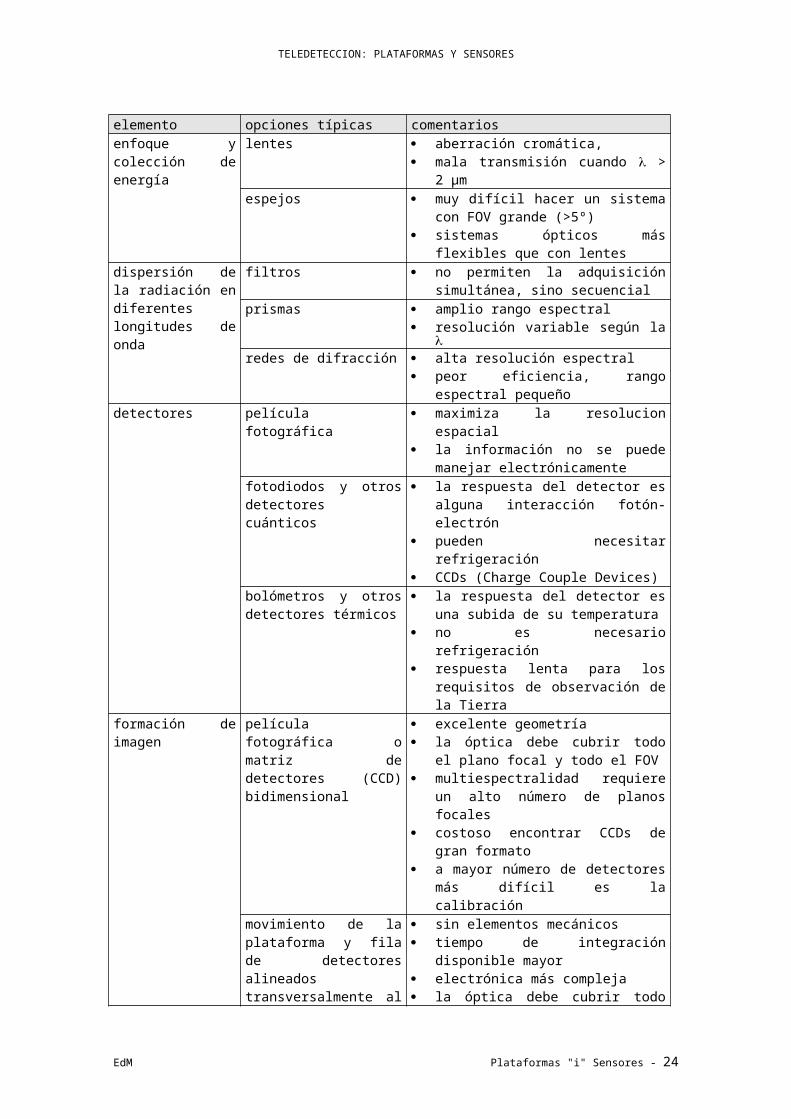
elemento opciones típicas comentariosenfoque y colección de energía
lentes aberración cromática, mala transmisión cuando > 2 µm
espejos muy difícil hacer un sistema con FOV grande (>5º)
sistemas ópticos más flexibles que con lentes
dispersión de la radiación en diferentes longitudes de onda
filtros no permiten la adquisición simultánea, sino secuencial
prismas amplio rango espectral resolución variable según la
redes de difracción alta resolución espectral peor eficiencia, rango espectral
pequeñodetectores película fotográfica maximiza la resolucion espacial
la información no se puede manejar electrónicamente
fotodiodos y otros detectores cuánticos
la respuesta del detector es alguna interacción fotón-electrón
pueden necesitar refrigeración CCDs (Charge Couple Devices)
bolómetros y otros detectores térmicos
la respuesta del detector es una subida de su temperatura
no es necesario refrigeración respuesta lenta para los requisitos de
observación de la Tierraformación de imagen
película fotográfica o matriz de detectores (CCD) bidimensional
excelente geometría la óptica debe cubrir todo el plano
focal y todo el FOV multiespectralidad requiere un alto
número de planos focales costoso encontrar CCDs de gran
formato a mayor número de detectores más
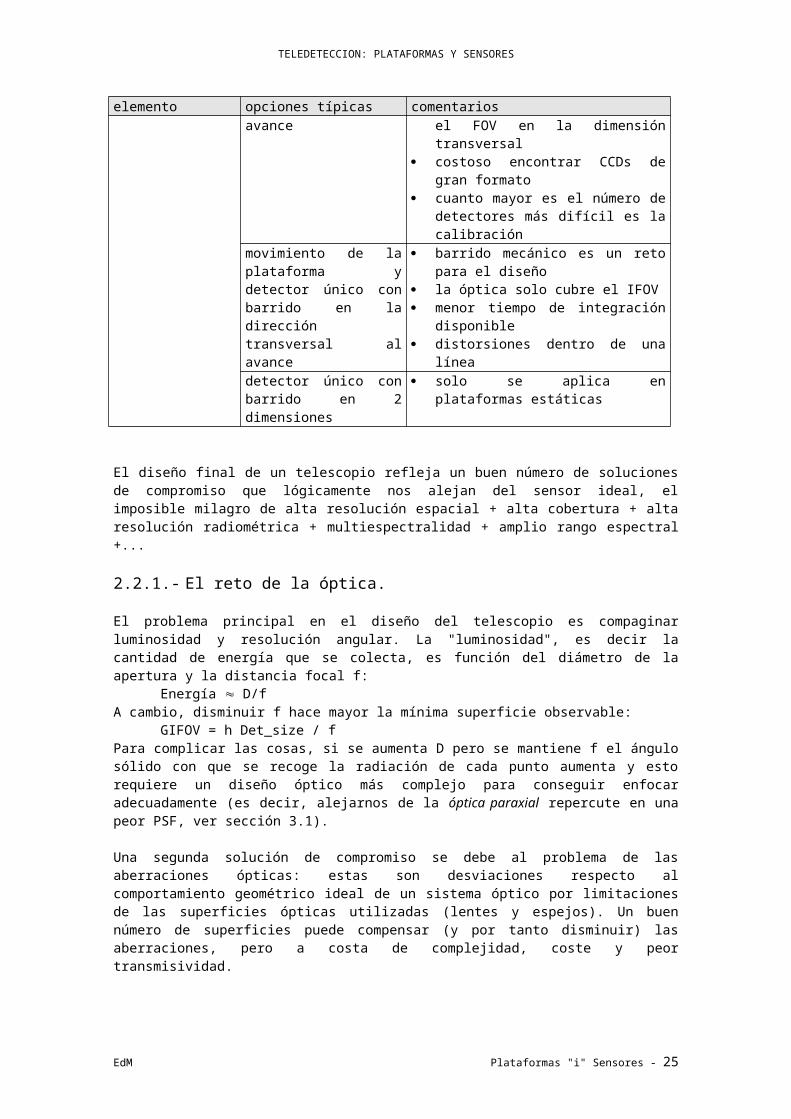
difícil es la calibraciónmovimiento de la plataforma y fila de detectores alineados transversalmente al avance
sin elementos mecánicos tiempo de integración disponible
mayor electrónica más compleja la óptica debe cubrir todo el FOV en la
dimensión transversal costoso encontrar CCDs de gran
formato cuanto mayor es el número de
detectores más difícil es la calibraciónmovimiento de la plataforma y detector único con barrido en la dirección transversal al avance
barrido mecánico es un reto para el diseño
la óptica solo cubre el IFOV menor tiempo de integración
disponible distorsiones dentro de una línea
detector único con barrido en 2 dimensiones
solo se aplica en plataformas estáticas
El diseño final de un telescopio refleja un buen número de soluciones de compromiso que lógicamente nos alejan del sensor ideal, el imposible milagro de alta resolución espacial + alta cobertura + alta resolución radiométrica + multiespectralidad + amplio rango espectral +...
EdM Plataformas "i" Sensores - 17
TELEDETECCION: PLATAFORMAS Y SENSORES
2.2.1.- El reto de la óptica.
El problema principal en el diseño del telescopio es compaginar luminosidad y resolución angular. La "luminosidad", es decir la cantidad de energía que se colecta, es función del diámetro de la apertura y la distancia focal f:
Energía D/fA cambio, disminuir f hace mayor la mínima superficie observable:
GIFOV = h Det_size / fPara complicar las cosas, si se aumenta D pero se mantiene f el ángulo sólido con que se recoge la radiación de cada punto aumenta y esto requiere un diseño óptico más complejo para conseguir enfocar adecuadamente (es decir, alejarnos de la óptica paraxial repercute en una peor PSF, ver sección 3.1).
Una segunda solución de compromiso se debe al problema de las aberraciones ópticas: estas son desviaciones respecto al comportamiento geométrico ideal de un sistema óptico por limitaciones de las superficies ópticas utilizadas (lentes y espejos). Un buen número de superficies puede compensar (y por tanto disminuir) las aberraciones, pero a costa de complejidad, coste y peor transmisividad.
Por otra parte, la difracción impone un límite a la menor resolución espacial que se puede obtener con un telescopio. La difracción se entiende con la visión ondulatoria de la radiación electromagnética, y es una interrupción de la propagación "normal" de la radiación al encontrar un obstáculo el frente de onda. Efecto de la difracción es que la imagen de un punto es una mancha; de manera que dos puntos próximos van a superponer su imagen en el plano focal aunque en teoría su distancia permitiera separarlos. Para una abertura circular (habitual en sistemas ópticos), el menor diámetro posible de la apertura a la longitud de onda es:
D = 1.22 / , (criterio de Rayleigh) donde es la distancia angular deseada entre los objetos a separar (convertible a longitud sin más que multiplicar por la distancia al objeto).
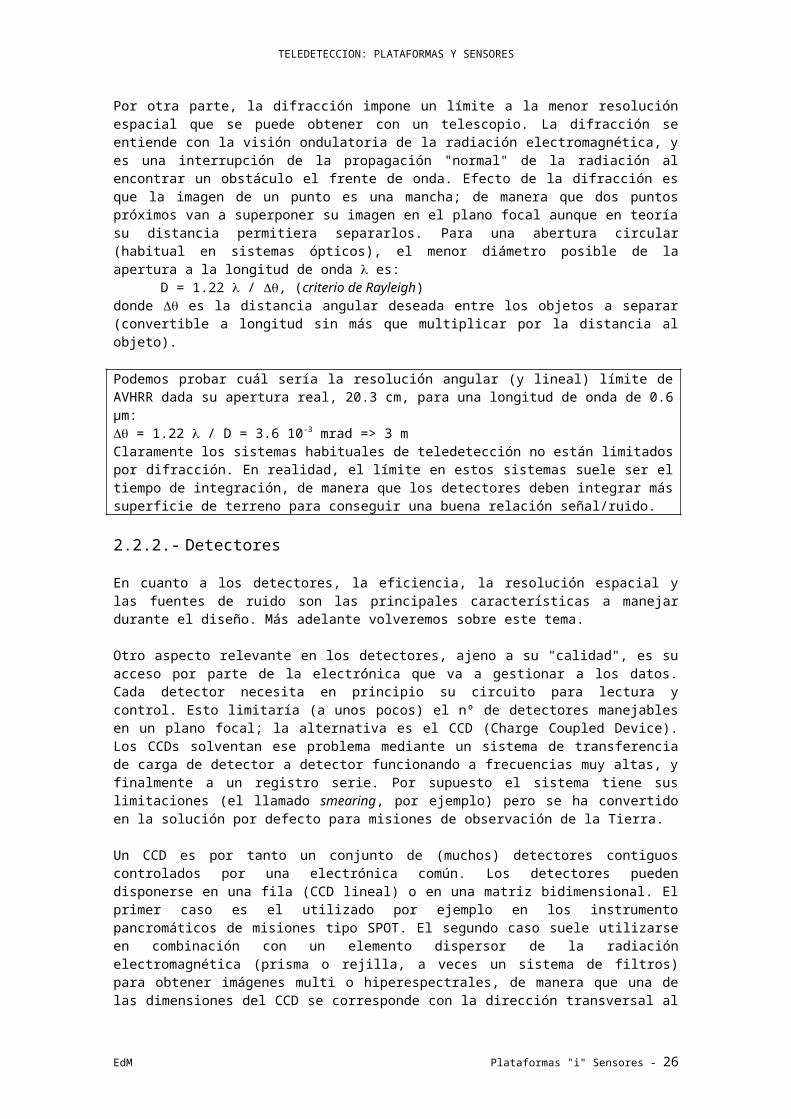
Podemos probar cuál sería la resolución angular (y lineal) límite de AVHRR dada su apertura real, 20.3 cm, para una longitud de onda de 0.6 µm: = 1.22 / D = 3.6 10-3 mrad => 3 mClaramente los sistemas habituales de teledetección no están limitados por difracción. En realidad, el límite en estos sistemas suele ser el tiempo de integración, de manera que los detectores deben integrar más superficie de terreno para conseguir una buena relación señal/ruido.
2.2.2.- Detectores
En cuanto a los detectores, la eficiencia, la resolución espacial y las fuentes de ruido son las principales características a manejar durante el diseño. Más adelante volveremos sobre este tema.
Otro aspecto relevante en los detectores, ajeno a su "calidad", es su acceso por parte de la electrónica que va a gestionar a los datos. Cada detector necesita en principio su circuito para lectura y control. Esto limitaría (a unos pocos) el nº de detectores manejables en un plano focal; la alternativa es el CCD (Charge Coupled Device). Los CCDs solventan ese problema mediante un sistema de transferencia de carga de detector a detector funcionando a frecuencias muy altas, y finalmente a un registro serie. Por supuesto el sistema tiene sus limitaciones (el llamado smearing, por ejemplo) pero se ha convertido en la solución por defecto para misiones de observación de la Tierra.
Un CCD es por tanto un conjunto de (muchos) detectores contiguos controlados por una electrónica común. Los detectores pueden disponerse en una fila (CCD lineal) o en una matriz bidimensional. El primer caso es el utilizado por ejemplo en los instrumento pancromáticos de misiones tipo SPOT. El segundo caso suele utilizarse en combinación con un elemento dispersor de la radiación electromagnética (prisma o rejilla, a veces un sistema de filtros) para
EdM Plataformas "i" Sensores - 18
TELEDETECCION: PLATAFORMAS Y SENSORES
obtener imágenes multi o hiperespectrales, de manera que una de las dimensiones del CCD se corresponde con la dirección transversal al avance de la plataforma para formar una línea de imagen, mientras la otra dimensión se corresponde con las diferentes longitudes de onda generadas por el elemento dispersor para generar diferentes bandas espectrales del mismo área de terreno.
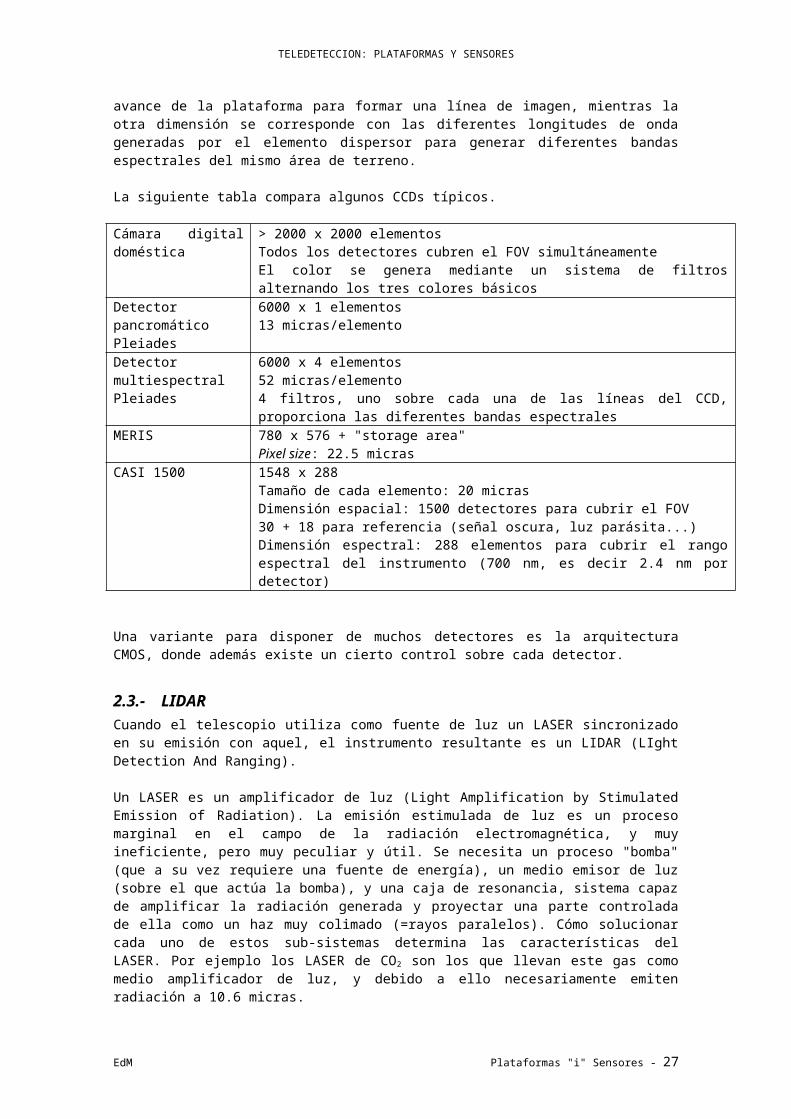
La siguiente tabla compara algunos CCDs típicos.
Cámara digital doméstica
> 2000 x 2000 elementosTodos los detectores cubren el FOV simultáneamenteEl color se genera mediante un sistema de filtros alternando los tres colores básicos
Detector pancromático Pleiades
6000 x 1 elementos13 micras/elemento
Detector multiespectral Pleiades
6000 x 4 elementos52 micras/elemento4 filtros, uno sobre cada una de las líneas del CCD, proporciona las diferentes bandas espectrales
MERIS 780 x 576 + "storage area"Pixel size: 22.5 micras
CASI 1500 1548 x 288Tamaño de cada elemento: 20 micrasDimensión espacial: 1500 detectores para cubrir el FOV30 + 18 para referencia (señal oscura, luz parásita...)Dimensión espectral: 288 elementos para cubrir el rango espectral del instrumento (700 nm, es decir 2.4 nm por detector)
Una variante para disponer de muchos detectores es la arquitectura CMOS, donde además existe un cierto control sobre cada detector.
2.3.- LIDARCuando el telescopio utiliza como fuente de luz un LASER sincronizado en su emisión con aquel, el instrumento resultante es un LIDAR (LIght Detection And Ranging).
Un LASER es un amplificador de luz (Light Amplification by Stimulated Emission of Radiation). La emisión estimulada de luz es un proceso marginal en el campo de la radiación electromagnética, y muy ineficiente, pero muy peculiar y útil. Se necesita un proceso "bomba" (que a su vez requiere una fuente de energía), un medio emisor de luz (sobre el que actúa la bomba), y una caja de resonancia, sistema capaz de amplificar la radiación generada y proyectar una parte controlada de ella como un haz muy colimado (=rayos paralelos). Cómo solucionar cada uno de estos sub-sistemas determina las características del LASER. Por ejemplo los LASER de CO2 son los que llevan este gas como medio amplificador de luz, y debido a ello necesariamente emiten radiación a 10.6 micras.
Normalmente, la luz del LASER se propaga hasta que encuentra elementos (partículas atmosféricas, una superficie...) donde es reflejada. Si se ha acoplado un telescopio al mismo instrumento que lo emitió podemos detectar una parte de la reflexión, midiendo su intensidad, polaridad o incluso su posible comportamiento espectral. La coherencia de la luz LASER, el exacto conocimiento de su posición espectral y la precisa sincronización de su emisión (habitualmente pulsada a frecuencias temporales elevadas, 50-100 Hz) permite analizar con alta resolución la posición donde se produjo esta reflexión; y también podemos recibir información sobre características físicas o químicas del objeto que causó la reflexión.
Los LIDAR se diferencian por varios aspectos:i. las características del pulso LASER que emiten (longitud de onda, frecuencia de los
pulsos, polarización o amplitud).
EdM Plataformas "i" Sensores - 19

TELEDETECCION: PLATAFORMAS Y SENSORES
ii. el tipo de análisis que se realiza de la señal registrada, que puede ser único (es decir solo se analiza la parte principal del retorno) o completo, en los llamados "full waveform".
iii. el sistema de apuntamiento, ya que puede existir algún mecanismo de barrido para formar imágenes, o limitarse a una emisión-recepción monodireccional.
Aplicaciones actuales o en desarrollo de los LIDAR son: Medida de distancias: LIDAR altimétrico y batimétrico Medida de distancia + estado físico-químico: LIDAR atmosférico para estudio de
aerosoles, contenido en vapor de agua, densidad (y por tanto temperatura)... LIDAR doppler, utilizado para estudiar el campo de vientos en la atmósfera Inducción de fluorescencia en vegetación estructura de la vegetación mediante full-waveform LiDAR.
Pero no es claro todavía qué se puede obtener en la práctica en algunas de estas aplicaciones.
Los LIDAR son útiles por tanto por su gran potencial para alta resolución radiométrica, espectral, temporal y espacial, y porque podemos tener un control cuidadoso de la iluminación de la escena. Sus desventajas son la relativamente poca potencia que podemos emitir (por limitaciones técnicas y por razones de seguridad), y la dificultad técnica de instalar LASER en plataformas espaciales (alto peso, alto consumo eléctrico, dispersión del haz con la gran distancia...). Debido a este problema, existen pocas misiones LIDAR operativas en plataformas espaciales (las misiones NASA CALIPSO y ICEsat con su instrumento GLAS son dos casos), aunque son habituales en plataformas aéreas.
2.4.- Radiómetros de microondasLa detección de microondas se realiza con una antena conectada a una electrónica adecuada. La antena debe barrer de alguna manera el área de interés para poder formar imágenes.Tanto los radiómetros de microondas pasivos como los activos (RADAR) se tratan en otras sesiones de este curso.
2.5.- RADARCuando el radiómetro de microondas utiliza como fuente de radiación una antena sincronizada en su emisión con aquel, el instrumento resultante es un RADAR (RAdio Detection And Ranging).
2.6.- Otros sensoresExisten otras soluciones para instrumentos de teledetección "exóticos". Por ejemplo:
polarímetros interferómetros espectrómetros por transformada de Fourier.
Y demás conceptos de uso marginal.
EdM Plataformas "i" Sensores - 20
TELEDETECCION: PLATAFORMAS Y SENSORES
3.- CARACTERIZACIÓN DE UN INSTRUMENTO/MISIÓN DE TELEDETECCIÓN
En la primera toma de contacto de un usuario con un instrumento/misión de teledetección, probablemente se encontrará con un resumen de características que se corresponden de nua manera directa o indirecta con los conceptos presentados en las secciones anteriores (ver anejo 2).
Podemos caracterizar completamente un sistema de teledetección, desde el punto de vista del usuario de sus datos, atendiendo a la siguiente tabla. En ella hemos definido las "categorías" a caracterizar y, en cada categoría (cada celda de la tabla), los parámetros más habituales, aunque no son los únicos.
espacial espectral radiométrica temporalresolución ó precisiónresolution (precision)
IFOVGSDPSF, MTF
FWHM
NEdL / NEdTSNR
cobertura ó rangorange
FOV rango espectralmuestreo espectral
rango dinámico revisitacontinuidad
exactitudaccuracy
apuntamientoco-registro
calibración calibraciónstraylight
--
Esta tabla parte de las siguientes definiciones (Bevington y Robinson, 1992). La cobertura es el rango de valores de la magnitud bajo estudio que el instrumento
puede registrar. Llamamos exactitud a la diferencia entre el valor real de un magnitud observada en un
experimento y el valor obtenido por un instrumento. Precisión es la medida de la resolución del instrumento, es decir su capacidad para
discriminar diferencias pequeñas en la magnitud medida.
Bajo estas definiciones, es claro que una medida solo puede ser muy exacta si es muy precisa, pero puede ser muy precisa e inexacta.
La exactitud requiere una calibración adecuada del instrumento; la precisión es inherente a su diseño.
Es importante conocer en profundidad los rasgos principales de cada celda de la tabla para poder analizar con el máximo rigor y eficacia los datos de teledetección. Y muy conveniente conocer la letra pequeña que se encuentra también en cada celda. Hay que destacar que las especificaciones habituales de un instrumento/misión de teledetección no suelen ser completas, y tampoco homogéneas: aunque casi todas coinciden en bastantes parámetros, siempre hay alguno que no se detalla o que se detalla de manera no "estándar".
Nos centraremos en instrumentos ópticos, aunque mucho de lo que se expone puede ser aplicable también en microondas.
3.1.- Caracterización espacial
RESOLUCION ESPACIAL
La resolución espacial es en primera aproximación el llamado "tamaño de pixel", o área de terreno correspondiente a un pixel en la imagen, es decir, la proyección del IFOV (Instantaneous Field Of View) sobre el terreno. Ya en esta primera aproximación a veces se
EdM Plataformas "i" Sensores - 21
TELEDETECCION: PLATAFORMAS Y SENSORES
utiliza la distancia entre dos centros de pixels en la imagen (Ground Sampling Distance), pero esto no es ya lo mismo. De una u otra manera se cita en las especificaciones de la mayor parte de instrumento de teledetección. Pero detrás de la resolución espacial hay aun más consideraciones.
El IFOV determina el área de terreno cuya energía recoge en un instante dado el sensor. A este área podríamos llamarle "elemento de resolución". Funcionalmente, el IFOV queda determinado por el diafrgama óptico (field stop) en sistemas whiskbroom y por el tamaño del detector en sistemas pushbroom o frame.
Para convertir un IFOV angular en área de terreno, la geometría es aproximadamente:Lx = 2 H tan(IFOV/2) sec2 () H IFOV sec2 () Ly = 2 H tan(IFOV/2) sec () H IFOV sec ()
dondeLx es la longitud en la dirección transversal al avance de la plataforma (across-track)Ly es la longitud en la dirección de avance de la plataforma (along-track)H es la altura de vuelo es el ángulo respecto del nadir, medido positivo
Por ejemplo, en TM el IFOV es 0.043 mrad y la altura de vuelo 705 km, y por tanto:Lx = 705000 * (0.043 10-3) = 30.3 m
En un extremo de la imagen, aproximadamente = (15.4º)/2 y entonces:Lx = 1.02 Lnadir Ly = 1.01 Lnadir
Vemos pues que en el caso de instrumentos de pequeño FOV (TM15.4º , SPOT 4.13º), el ángulo es suficientemente pequeño como para despreciar su efecto sobre el tamaño de pixel al alejarnos del nadir. No así en los de gran FOV como AVHRR (IFOV 0.0745º, FOV 55.37º):
Ahora bien, el valor calculado a partir del IFOV no es exactamente el espaciamiento sobre el terreno entre el centro de dos pixels consecutivos. Existen diversas razones, dependiendo del diseño detallado de cada instrumento y del margen de seguridad que se quiere obtener al adquirir sucesivas líneas. En general, se produce un pequeño solape entre el área de terreno que ven dos pixels consecutivos. El efecto neto es que la imagen tiene una resolución espacial real algo menor que la correspondiente al espaciamiento entre pixels, o visto de otra manera que la imagen tiene una ligera borrosidad (cada píxel contiene terreno previamente observado).
Para una primera especificación de las características de un sistema óptico, la visión de la proyección del IFOV (es decir la visión de la óptica geométrica) es adecuada. Pero esta información no nos basta para garantizar que podamos distinguir todos los objetos con un tamaño superior al indicado por la resolución espacial del instrumento. El éxito depende del contraste de dicho objeto respecto al fondo. La Función de Transferencia de Modulación (MTF) nos da esta información.
Toda escena a ser observada puede ser representada completamente por un conjunto infinito de ondas en el llamado "espacio de frecuencias". Cada onda con diferentes amplitudes, fases y frecuencias (espaciales, es decir medidas en m-1 y leídas como "ciclos por metro") entre 0 y 1. La propagación de cada una de estas ondas a través de la óptica no es perfecta, de manera que las amplitudes se atenúan (las fases se modifican en cualquier sentido) y el contraste sobre la imagen es siempre menor que en la escena real. Las frecuencias de cada onda se mantienen, por su parte, intactas. Podemos medir el contraste mediante el concepto llamado modulación:
modulación = Amplitud/media = (max-min) / (max+min)
Una medida de la reducción del contraste causada por un sistema óptico es el cociente entre la modulación en la escena real y la registrada en la imagen. Si calculamos este cociente para cada frecuencia espacial presente en la imagen tenemos la MTF del sistema óptico. La
EdM Plataformas "i" Sensores - 22

TELEDETECCION: PLATAFORMAS Y SENSORES
transformada de Fourier de la MTF es la llamada Point Spread Function (PSF), una medida de cuánto se "esparrama" un punto al ser observado por el sistema óptico.
El valor que nos interesa es el de la frecuencia de Nyquist. Esta es el doble de la frecuencia de muestreo = un pixel; por tanto, el doble es 1 ciclo cada 2 pixels (f = 0.5), el típico "uno sí / uno no". En esta frecuencia un sistema real produce una MTF del orden de 0.2 a 0.3.
Es importante saber que hasta un sistema óptico perfecto está limitado en su capacidad de leer frecuencias espaciales por los efectos de difracción en los bordes de la apertura. Los sistemas reales añaden pérdidas de contraste por aberraciones ópticas (corregibles con un buen diseño), por las vibraciones del instrumento (jitter), por atmósfera, por el carácter discreto y finito del detector/detectores...
Por último, recordar que la resolución espacial (y por supuesto la cobertura y la exactitud) pueden aplicarse a 3 dimensiones en sistemas que miden alcance (altimétricos o batimétricos).
EXACTITUD ESPACIAL
Nos informa de la diferencia entre la posición cartográfica de un dato, en X,Y y eventualmente Z, y su posición real (o al menos de referencia).
La exactitud espacial, al igual que algunos otros parámetros, es variable dependiendo de los procesos que haya sufrido la imagen. En realidad, siempre debe haber un cierto nivel de proceso: no hay una posición original en un dato de teledetección más que su ordenación en el conjunto de datos que forman la imagen.
Una primera asociación de posición puede hacerse conociendo la posición de la plataforma en el momento de la adquisición de datos y proyectando sobre la superficie terrestre la geometría de visión del instrumento. Para una buena geolocalización sin puntos de control es por tanto necesaria alta resolución y exactitud en el conocimiento del apuntamiento del instrumento.
Muchos sistemas de teledetección ofrecen al usuario datos ya georeferenciados, de manera que la corrección geométrica es cada vez menos una tarea del intérprete de datos y más una característica de la misión o sistema.
Un punto que puede ser relevante para la georreferenciación es la exactitud en la traza de la órbita. Es casi imposible repetir dos trazas (o pases) nominalmente idénticas, lo que limita el área efectivamente revisitada. A otra escala, la del píxel, la variabilidad de la traza determina que la superposición de imágenes va a tener necesariamente un límite del orden de una fracción de píxel.
COBERTURA ESPACIAL
Se trata de definir el área de terreno que incluye una imagen. Para instrumentos que forman la imagen aprovechando el avance de la plataforma, solo está definida la dimensión transversal a la dirección de avance (across-track), que despreciando el efecto de la curvatura de la Tierra es:
A = 2 H tan(FOV/2) donde:
A es el ancho de la escenaH es la altura de vuelo (respecto al terreno)
La otra dimensión no está en principio limitada, salvo por requisitos operativos (por ejemplo de consumo del instrumento o de capacidad de almacenamiento de datos).
Para instrumentos con adquisición simultánea de toda la imagen (fotografía aérea, "frame sensors"), las dos dimensiones están definidas a través de la fórmula anterior, sin más que considerar la posibilidad de un distinto FOV en las dos direcciones.
EdM Plataformas "i" Sensores - 23
TELEDETECCION: PLATAFORMAS Y SENSORES
3.2.- Caracterización espectral
RESOLUCION ESPECTRAL
Se refiere al tamaño de las regiones espectrales que se pueden medir separadamente. Este tamaño se detalla muchas veces como "límites de banda" (band edges). Pero hay que considerar que los límites citados para las bandas de un instrumento no son límites netos. De hecho, el valor indicado puede corresponder al intervalo que contiene el 95% de la potencia recibida, o quizás el 99%, o las longitudes de onda donde encontramos una respuesta igual a la mitad de la respuesta máxima (FWHM, "Full Width Half Maximum"). Esta última es la especificación más habitual. Asumiendo que la responsividad espectral es gaussiana (hipótesis razonable en bandas estrechas, no tan fiable en bandas anchas), los parámetros anteriores sirven para reconstruir totalmente la respuesta espectral.
El rango de resoluciones encontrado varía desde 1.5 nm (espectrómetros), pasando por 10 nm (banda estrecha) y 100 nm (banda ancha) hasta varias micras en sensores térmicos. A mayor ancho de banda para una longitud de onda dada, mayor sensibilidad del instrumento (ya que recibe más señal por canal), a costa de menor capacidad de discriminación de información.
Una magnitud útil para visualizar la resolución espectral es , es decir el cociente entre la longitud de onda central de un canal y el ancho del canal. Esto es debido a que la energía de la radiación no es constante con la longitud de onda, sino que aumenta con la frecuencia de la radiaición: la energía de un fotón es: E = h donde h es la constante de Planck (6.62 10-34 j s) y la frecuencia del fotón (s-1). Al ser mayor la energía a longitudes de onda menores, un canal estrecho en el azul recibe más energía y por tanto tiene una sensibilidad mayor que un canal del mismo ancho en el térmico.
EXACTITUD ESPECTRAL
La posición exacta de cada banda depende de la calidad de la calibración y de la estabilidad espectral durante la operación del instrumento. Habitualmente se considera que la posición especificada es la real, de manera que frecuentemente la exactitud espectral se asume correcta y no se informa al usuario. Solo con la llegada de misiones hiperespectrales, cercanas al concepto de espectrómetro, se está prestando atención a la exactitud espectral. Por ejemplo MERIS y MODIS, que llevan incorporado en su diseño de calibración a bordo un sistema para evaluar la exactitud espectral de las bandas registradas. En estos sensores de alta resolución espectral es también posible utilizar rasgos espectrales del terreno o de la atmósfera (notablemente la absorciónpor oxígeno a 760 nm) para refinar la posición espectral de las bandas frente a los valores teóricos.
COBERTURA ESPECTRAL
La cobertura espectral se refiere al conjunto de longitudes de onda a los que el instrumento es sensible.
No es fácil hacer un instrumento que cubra todos los rangos espectrales posibles. Sin embargo, es una cualidad muy deseable.
Los sistemas whiskbroom (TM, MODIS, AVHRR, METEOSAT, AHS...) pueden cubrir fácilmente desde el visible al térmico. Esto es así por que incluyen:-óptica pequeña (la óptica solo cubre el IFOV, el FOV se sintetiza con el movimiento de la óptica), que es más fácil de diseñar mediante un sistema de espejos (no hay lentes eficientes en longitudes de onda > 2 µm),-detector único en cada longitud de onda (usualmente en planos focales independientes), que es relativamente fácil de enfriar.
Los sistemas de empuje (HRV-SPOT, MERIS, CASI...), de óptica y planos focales mayores, no se han utilizado normalmente para cubrir más alla de 1.1 micras (que es el límite de utilidad de
EdM Plataformas "i" Sensores - 24
TELEDETECCION: PLATAFORMAS Y SENSORES
los detectores CCD de silicio) y excepcionalmente 2 micras. Como ya se ha dicho, los detectores térmicos son más difíciles de ensamblar y operar en un diseño matricial. Dado que no hay limitaciones tecnológicas insalvables, tales sistemas serían de esperar en el futuro... pero de momento no se encuentran.
Un ejemplo de sistema mixto pushbroom/whiskbroom es el instrumento ASTER; en realidad, se trata de dos insrumentos unidos en una misma plataforma (tres con el SWIR).
En el área de las microondas, la cobertura espectral nos remite al manejo de diversas bandas, lo cual se utiliza en radiómetro pasivos (p.e. AMSR en las misiones EOS) y en algunos SAR aeroportados.
3.3.- Caracterización radiométrica
RESOLUCION Y EXACTITUD RADIOMETRICA
En teledetección, el objetivo de precisión radiométrica nos va a determinar unos requisitos de digitalización, sensibilidad y, en última instancia ruido (el ruido no debe ser mayor que la resolución obtenida). Y el de exactitud, una calibración de los datos.
Un uso riguroso de los datos de teledetección puede requerir una resolución Δρ=0.005 a 0.01 (0.5% a 1%) en la reflectancia del objeto observado, y una exactitud mejor que el 5% de esta (esto por su puesto, dependiendo de la aplicación).
Al expresarse las reflectancias en porcentaje, hay que tener cuidado con las especificaciones absoluta y relativaresolución absoluta de 1% siginifica distinguir Ref1 = 20.0% de Ref2 = 21.0%resolución relativa de 1% siginifica distinguir Ref1 = 20.0% de Ref2 = 20.2% (mucho más exigente)
La resolución radiométrica de un instrumento es el mínimo incremento en radiancia recibida por el sensor (Ls) que registra. Esta cantidad viene dada por el valor más limitante entre el Ls correspondiente a una unidad digital en la imagen de salida, y el ruido instrumental (variabilidad de la señal que no corresponde a información del objeto estudiado).
Las fuentes de ruido instrumental aparecen en el detector y en la cadena electrónica hasta que la información se fija de algún modo. Las más típicas son:-Ruido de corriente oscura: la corriente oscura es la salida del detector que se debe a electrones generados térmicamente, y debido al caracter cuántico del proceso presenta una variabilidad igual a la raíz cuadrada de su valor medio: esta variablidad es la que consideramos ruido, ya que el valor esperado de corriente oscura se conoce. Este valor esperado tiene un ritmo de generación constante (para cada modelo de detector) que depende de la temperatura, por tanto el valor final depende del tiempo de integración (es decir, cuantos más fotones acumulamos en el detector también generamos más corriente oscura, y por tanto más ruido por su variabilidad) y de la temperatura de operación del detector.-Ruido de lectura, que se produce por variaciones en el valor leído por el registro de lectura para cada dato; este valor suele ser especificado por el fabricante del detector.-Ruido en la cadena de amplificación y proceso (normalmente en la etapa analógica), que depende del diseño de la electrónica y no del detector en sí (y por tanto instrumentos con el mismo detector pueden tener niveles de ruido diferente).-Ruido de digitalización, debido a la incertidumbre en la cuantización de la señal analógica.
Cada una de estas fuentes de ruido se caracteriza por la desviación típica que producen en la medida del instrumento, de manera que si asumimos que son normales e independientes (hipótesis muy realista) las combinamos con una media cuadrática para obtener el ruido total.
Estas fuentes de ruido se consideran normalmente aditivas, es decir responden a un modelo: medición = señal + ruido
EdM Plataformas "i" Sensores - 25
TELEDETECCION: PLATAFORMAS Y SENSORES
y por tanto son independientes del nivel de la señal. Por contra, a veces es necesario considerar en los análisis el ruido fotónico propio de la señal, y este sí depende de la intensidad de la señal (es multiplicativo).
El ruido fotonico es la variablidad natural en la propagación de fotones: aunque la reflectancia de una superficie sea constante, la medida del número de fotones que provienen de ella sigue una distribución de Poission. Por tanto dos mediciones diferentes de la misma señal pueden dan un resultado distinto, y esto es asimilable a un ruido.
El ruido instrumental está típicamente expresado en unidades de radiancia (o similares) y por tanto podemos interpretarlo como el cambio en la radiancia recibida por el instrumento que equivale a su ruido: este es el concepto de NEdL (Noise Equivalent (delta) radiance). Cuando realizamos un supuesto de observación (es decir, considerando la iluminación, la topografía de la superficie observada y las condiciones de observación) podemos traducir ese valor a reflectancia, e interpretar la magnitud correspondiente como el cambio en la reflectancia del objeto que origina una señal equivalente a su ruido: NEd. En radiómetros térmicos es frecuente convertir el ruido en una variación en temperatura, y especificar así su resolución radiométrica como NEdT.
Ahora bien, el valor de NEdL solo nos indica cuándo el ruido es típicamente (1 desviación típica, es decir el 68% de las veces si es un ruido aleatorio) igual a la mínima señal que queremos distinguir. Si queremos estar seguros de que podemos detectar esa señal, puede que necesitemos que sea superior a NEdL. Por ejemplo podemos querer que sea superior el 99% de las veces, y entonces nuestro ruido debe ser 3 veces menor que la señal a detectar => este es el concepto de relación señal/ruido (SNR, cociente entre el valor de una señal y el ruido de la medida). Frecuentemente, esta relación no se usa solo para determinar la mínima señal detectable, sino que se especifica para otros valores de la radiancia recibida, como una señal típica o una señal máxima, como figura de mérito del sistema. Se suele considerar que un ssitema debe trabajar con una SNR del orden de 100 para la radiancia de referencia (es decir, la que el usuario señala como prioritaria).
Por supuesto, estas es la especificación de resolución para una muestra (pixel). Si disponemos, por repetición temporal o espacial, de más muestras de la superficie bajo estudio (imaginemos un lago del que queremos cuantificar la eutrofización a partir de su reflectancia), podemos mejorar la relación SNR (de hecho la mejoramos tanto como sqrt(n) si sumamos n muestras).
La calibración del instrumento solo puede garantizar la exactitud en la medida de Ls, la radiancia en el sensor (también llamada TOA, Top Of Atmosphere, en satélites). Para una exactitud a nivel del terreno (bien radiancia reflejada por el terreno o BOA, Bottom Of Atmosphere, bien reflectancia) es necesario considerar la interferencia atmosférica, lo cual ya depende de medidas auxiliares, normalmente externas al instrumento; no entramos en este aspecto.
A veces la calibración no es suficiente para garantizar la exactitud radiométrica. Un caso es la presencia de straylight, o luz dispersa o parásita. Se trata de fotones que llegan al detector provenientes de una fuente que espacial o espectralmente no corresponde al detector al que se asigna. El origen de esos fotones son reflexiones indeseadas dentro del instrumento, y hacen que se asigne a un área de terreno una cantidad de energía incorrecta; esta cantidad de energía puede ser significativa en instrumento con un objetivo de resolución radiométrica muy elevado, como MERIS o MODIS. La calibración en laboratorio puede no modelizar correctamente esta contaminación óptica, ya que depende de la escena observada. La eliminación de la straylight se puede asimilar a la deconvolución de la PSF instrumental, solo que en este caso tendríamos una PSF por straylight, y esa función no es sencilla de definir.
COBERTURA RADIOMETRICA
El rango de energía que se encuentra un instrumento de teledetección es muy variable, desde la bajísima señal que puede provenir de una masa de agua con un ángulo de elevación solar bajo a la muy elevada de una nube observada en verano. El rango dinámico del instrumento
EdM Plataformas "i" Sensores - 26
TELEDETECCION: PLATAFORMAS Y SENSORES
informa de cuáles son los valores mínimos y máximos que puede interpretar correctamente. Típicamente, por debajo del mínimo el instrumento no responde o el ruido domina sobre la señal, y por encima se satura o deja de responder linealmente.
Existe por supuesto un trade-off entre cobertura y resolución: a mayor cobertura radiométrica es más difícil mantener una resolución fina. Algunos instrumentos incorporan ganancias variables para solucionar el problema, mientras otros optan por incrementar el número de bits disponibles para la digitalización del dato (lo que a su vez pasa el problema al ruido).
3.4.- Caracterización temporal
EXACTITUD Y PRECISION TEMPORAL
La exactitud en el registro del tiempo está garantizada, al nivel requerido por el usuario de un dato de teledetección, por los requisitos de exactitud y precisión impuestos por la operación de satélites y aviones. Se puede conocer con precisión y exactitud de microsegundos el momento de adquisición de una imagen, y el usuario probablemente se conforma con algo así como hectosegundos. La precisión temporal puede ser importante sin embargo para la restitución de la imagen usando modelos orbitales. En un segundo, un satélite en órbita heliosíncrona avanza 7.5 km en la dirección de vuelo, y la Tierra se ha desplazado 400 m hacia el este. Y un avión con sensor aeroportado realiza en un segundo movimientos que pueden implicar desplazamientos del ángulo de observación del orden de un pixel.
Un aspecto relacionado es el del plazo de entrega. Este depende del diseño del segmento terreno (tanto del procedimiento de envío y recepción de datos como de su proceso y distribución).
COBERTURA TEMPORAL
Bajo este concepto nos interesan dos aspectos:- la continuidad de los datos, importante para el seguimiento a medio plazo de fenómenos con evolución en periodos de años (cambios de uso del suelo, por ejemplo). En este sentido son de gran valor las series Landsat-TM, NOAA-AVHRR y SPOT, con cerca de 20 años de datos. Por el contrario, misiones como ASTER, "puntuales", son menos valiosas. - la repetitividad, o muestreo temporal.
Notad que el muestreo no había sido importante hasta aquí porque tanto espacial como radiométricamente es continuo (o casi): solo espectralmente tenemos la misma dualidad cobertura en rango / cobertura en muestreo.
El muestreo temporal de una misión puede considerarse en un sentido geométrico-orbital, o desde el punto de vista de la superficie observada:
i. Orbitalmente, se suele citar el periodo que la órbita necesita para repetir exactamente la misma traza sobre el suelo (ground-track). Este valor oscila (dependiendo de la altura de la órbita) alrededor de unos 20 días en misiones de observación de la Tierra en órbitas bajas.
ii. Debido a la cobertura espacial de la imagen un punto de la superficie terrestre aparece en varias imágenes, aunque no hayan sido adquiridas desde la misma traza. En este sentido el FOV del sensor y la posibilidad de desplazar su ángulo de visión (lateralmente) son determinantes. Por otra parte, y debido al creciente perímetro de la Tierra desde los polos hacia el ecuador, las latitudes altas son observadas con mayor continuidad que las bajas en órbitas heliosíncronas.
En órbitas geosíncronas no es relevante este aspecto (aunque existe una traza no-puntual sobre la superficie de la Tierra, que dibuja algo parecido a un ocho inclinado, normalmente es despreciable), sino solo el tiempo transcurrido entre dos imágenes que ya sabemos van a corresponder siempre al mismo área de la Tierra.
EdM Plataformas "i" Sensores - 27
TELEDETECCION: PLATAFORMAS Y SENSORES
4.- PRINCIPALES INSTRUMENTOS DE TELEDETECCIÓN DISPONIBLES
Las tablas del anejo 1 resumen, con intención más bien pedagógica que servir de prontuario o referencia, los principales instrumentos/misiones de teledetección que un usuario puede encontrar cuando desea abordar un estudio con datos de teledetección.
Para más información , lo mejor es acudir a las páginas web de cada caso.
BIBLIOGRAFIA
Unos pocos libros clásicos y venerables, interesantes para Plataformas y Sensores:
Space Mission Analysis and Design (3rd edition). W.J. Larson, J.R. Wertz (editors). Space Technology Library, 1999.
Introduction to radiometry. William L. Wolfe. 1998. SPIE Press (vol TT29).
Observation of the Earth and its environment. H.J. Kramer. 1996. 3rd edition. Springer
Data reduction and error analysis for the physical sciences. Philip R. Bevington, D. K. Robinson. 2nd edition. MacGraw-Hill. 1992.
Algunas páginas web que incluyen documentación notable:
CEOS (Committe on Earth Observation Satellites) Handbook:http://www.eohandbook.com
ENVISAT handbooks (incuyen la descripción de cada instrumento):http://envisat.esa.int/handbooks/
NASA Remote Sensing Tutorial, Sensor Technology:http://rst.gsfc.nasa.gov/Intro/Part2_5a.html
TERRA (EOS AM-1) web page:http://terra.nasa.gov
Y unos pocos artículos revisando alguno de los aspectos tratados en estos apuntes:
Joseph, G., “How well do we understand Earth observation electro-optical sensor parameters?” ISPRS Journal of Photogrammetry and Remote Sensing 55 (2000), 9-12.
Xiong X, Wenny B, Barnes W, Salomonson V. "Overview Of MODIS Calibration And Characterization And Lessons Learned". In: 2009 IEEE International Geoscience and Remote Sensing Symposium; JUL 12-17, 2009; Cape Town, SOUTH AFRICA. 2009. p. 2397-2400.
Adam C. Watts, Vincent G. Ambrosia and Everett A. Hinkley. "Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use". Remote Sensing, 2012, 4, 1671-1692; doi:10.3390/rs4061671
EdM Plataformas "i" Sensores - 28
TELEDETECCION: PLATAFORMAS Y SENSORES
ANEJO 1: SELECCIÓN DE INSTRUMENTOS DE TELEDETECCIÓN
EdM Plataformas "i" Sensores - 29
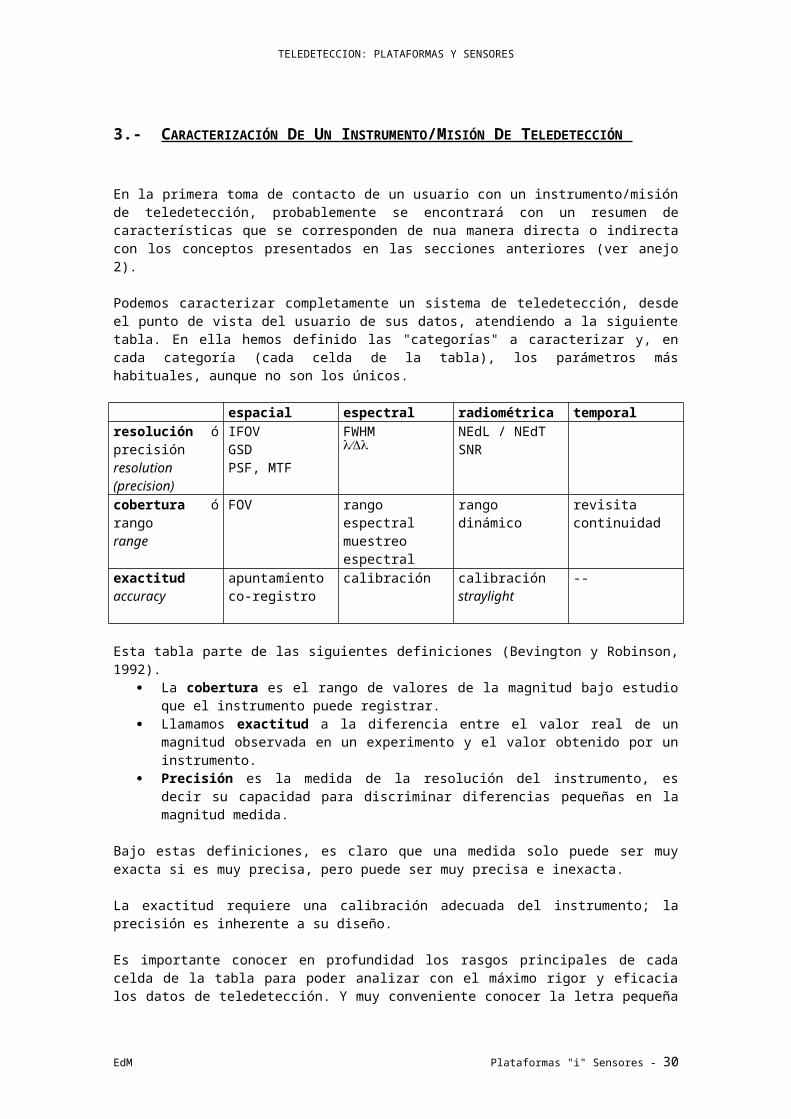
TELEDETECCION: PLATAFORMAS Y SENSORES
INSTRUMENTOS ESPACIALES: PRESENTES O RELEVANTES PARA MISIONES PRESENTES.
instrumento plataforma resolucion espac cobertura espac exactitud espac resolucion rad cobertura rad exactitud rad resolucion / cobertura espectral cobertura tempTM LANDSAT 4-5 30 m
120 m185 x 185 km -- 8 bits
0.7-1.0 LTM3:0-225TM5:0-30
7 bandas VIS-IR <12 16 días (c.o.)desde 1982
ETM LANDSAT 7 30 m60 m15 m
185 x 185 km 250 m (sin puntos de control, relieve plano)
8 bitsen TM3-4baja: 0.92 Lalta: 0.6 L
2 ganancias:p. e. en TM3-4baja: 0-225 Lalta: 0-150 L
10% 7 bandas +banda pan: 0.52-0.90 16 días (c.o.)
Landsat-8 (LDCM)
NASA/USGS 30 m15 m PAN100 m TIR
185 km Abs. geodetic accuracy 65 m Rel. geodetic accuracy of 25 m (excluding terrain effects), Geometric acc. 12 m or better including compensation for terrain effects
12 bit 8 + PAN + TIR 16 días (c.o.)
HRV(HRVIR)
SPOT 1-4 20 m10 m
60 km x 60 km < 350 m (rms)(sin puntos de control, relieve plano)
8 bits B2: 4-355B3: 2-262
-- B1: 0.50-0.59 P: 0.50-0.73 B2: 0.61-0.68B3: 0.78-0.89(B4: 1.58-1.75)
26 días (c.o.)1-4 días efect.desde 1986
HRG SPOT 5 10 m5 m (2.5 m por remuestreo)
60 km x 60 km < 50 m (rms) 8 bits -- -- como HRV excepto P: 0.48-0.71 --
HRS SPOT 5 5 m x 10 m (5 m por remuestreo)
600 km x 120 km < 15 m (rms) 8 bits -- -- P: 0.49-0.69 --
AVHRR NOAA-*METOP
1.1 km nadir0.0745º
3000 km55º
-- 10 bitsVIS: SNR>9.1 @ =0.5%TIR:NEdT>0.12 K @ 300K
2 gananciasTIR: 180-335 K
-- 0.58-0.68, 0.72-1.0, 1.58-1.64, 3.55-3.93, 10.-11.3, 11.5-12.5
--
MERIS ENVISAT 250 m (68º) 575 km 2000 m 0.1-0.3 w m-2 sr-1 µm-1
(NEd 0.003)
0-240 L@ 0.66 µm
2% 15 bandas 10 nm, entre 0.4 y 1 µmexactitud espectral < 1 nm
RIP 2012
MODIS EOS TERRA EOS AQUA
B1-B2: 250 m B3-B7: 500 mB8-B36: 1000 m
2330 km -- 12 bits -- -- B1: 0.62-0.67, B2: 0.84-0.88+ 34 bandas >20 entre 0.40 y 14 µm
1 día
ASTER EOS TERRA B1-B3: 15 m B4-B9: 30 mB10-B14: 90 m
60 km -- NEdVNIR 0.0035SWIR 0.007TIR: NEdT 0.3K @ 300K
200 -> 370 K VNIR: < 4% B1: 0.52-0.60, B2: 0.63-0.69, B3: 0.76-0.86+6 bandas SWIR (inválidas desde mid-2008)+5 bandas TIR
16 días (c.o.)programable"duty cycle" 8% (16% TIR)SWIR
SeaWiFS SeaStar 1.1 km nadir 1500 km -- 10 bits digitalización bilinear
8 bandas entre 0.40 y 0.85 micras 1 día
Vegetation SPOT 4-5 1000 m 2250 km <350m(SPOT4)<50 m(SPOT5)
10 bits = 0-0.5 VIS = 0-0.7NIR
5% B0: 0.45-0.52B2: 0.61-0.68
1 díadesde 1998
EdM Plataformas "i" Sensores - 30
TELEDETECCION: PLATAFORMAS Y SENSORES
instrumento plataforma resolucion espac cobertura espac exactitud espac resolucion rad cobertura rad exactitud rad resolucion / cobertura espectral cobertura temp = 0-0.6 SWIR B3: 0.78-0.89
B4: 1.58-1.75IKONOS IKONOS Pan: 0.8 m
Multi: 3.2 m11.3 x 11.3 kmMTF @ Nyquist 0.15 (pan) 0.30 (multi)
12 m (5 m) 11 bits SNR > 94 para = 0.2 & solar elevation = 30º
-- 10% Pan: 0.45 - 0.90Multi: .45-.52 / .51-.60 / .63-.70 / .76-.85
3-4 días efectivo
GeoEye-1 GeoEye-1 Pan: 0.4 mMulti: 1.6 m
15 km 11 Pan: 0.45 - 0.80Multi: .45-.51 / .51-.58 / .65-.69 / .78-.92
desde 2008, 10 años vida
WorldView-3 WorldView-3 Pan: 0.31 mVNIR: 1.24 mSWIR: 3.70 m
swath 13 km < 3.5 m CE90 VNIR 11 SWIR 14 bits/pix
-- -- Pan + 8 bandas VNIR + 8 bands SWIR lanzado agosto 2014
CAVIS WorldView-3 30 m aprox. 15 km -- -- -- -- 12 bandas distribuidas por VNIR & SWIRDMC UK-DMC
Alsat1,ArgeliaNigeriasat-1Beijing-1, Bilsat1,TurquiaDeimos
32 m
22 m
600 km ?? ?? ?? ?? TM2, TM3, TM4
SEVIRI MSG 3 km nadirPan: 1 km nadir
disco terreno -- 10 bitsVIS: 0.5-1.1 LTIR: 0.25 K @ 300 K
0-459 L0-335 K
VIS: 5%TIR: 0.25 K
HRV (pan): 0.6-0.9VIS-NIR: .56-.71 / .74-.88 / 1.5-1.8TIR: 3.5-4.4 / 8.3-9.1 / 9.8-11.8 / 11.0-13.0Otras: 5.3-7.1 / 6.8-7.8 / 9.4-9.9 / 12.4-14.4
15 min
Pleiades HR Pleiades Pan 0.7mVNIR 2.8 m
20 km < 1 m ?? ?? ?? Pan + Blue+Green+Red+NIR cobertura diaria programable
INSTRUMENTOS EN FASE DE PLANIFICACIÓN O CONSTRUCCIÓN
instrumento plataforma resolucion espac cobertura espac exactitud espac resolucion rad cobertura rad exactitud rad resolucion / cobertura espectral cobertura tempEnMap EnMap 30 m swath 30 km
5000 km along track per day
corregistro VNIR/SWIR<0.2 pix
VNIR 0.05 SWIR I: 0.03 SWIR II: 0.03 SWIR III: 0.01
5% 94 VNIR, 134 SWIRVNIR (420-1000 nm)SWIR I (900-1390 nm)SWIR II (1480- 1760 nm)SWIR III (1950-2450 nm)
2015
Sentinel-2 ESA "superespectral", 9 bandas VNIR + 1.37 +1.61 +2.19 2015Sentinel-3 ESA Vocación oceánica, con un instrumento tipo MERIS (OLCI) y otro tipo AATSR (SLSTR) 2015INGENIO INGENIO Pan 2.5m
VNIR 10 m55 km Pan
AzulVerdeRojaNIR
2016
Todas las magnitudes etiquetadas como L son radiancias expresadas en w m-2 sr-1 µm-1
c.o.: ciclo orbital
EdM Plataformas "i" Sensores - 31
TELEDETECCION: PLATAFORMAS Y SENSORES
MICROONDAS
instrumento plataforma resolucion espac cobertura espac exactitud espac resolucion rad cobertura rad exactitud rad resolucion / exactitud / (cobertura) espectral cobertura tempSAR ERS 1-2 banda C (5.3 GHz = 6 cm), polarización VV desde '91ASAR ENVISAT 30 - 1000 m 100 - 400 km 1.6 - 3.6 dB 1.6 - 2.2 dB banda C (5.3 GHz = 6 cm), polarización VV,
HH, VH, HVSAR RADARSAT 10-100 m 50x50 - 500x500 banda C (5.3 GHz = 6 cm), polarización HHSentinel 1 Sentinel 1 5x5 -> 20x40 m variable banda C 6 días con 2
satélitesTerraSAR-X TerraSAR-X
TanDEM-X1 m -> 18 m variable error 1σ < 1 m banda X
INSTRUMENTOS AEROPORTADOS
instrumento operadores resolucion espac cobertura espac exactitud espac resolucion rad cobertura rad exactitud rad resolucion / exactitud / (cobertura) espectral comentarios
AHS INTA 2.5 mrad 90º (750 pixels) -- 12 bits multiples ganancias
banco de calibración en laboratorio
80 bandas entre 0.4 y 13 µm, < 20 --
CASI 2CASI 3 (=CASI 1500)
INTA y > 20 instituciones (p.e. ICC)
CASI-2: 1.3 mradCASI-3: 0.5 mrad
38º, 500 pixel40º, 1500 pixel
-- 12 bitsSNR 420 (max)
-- 2% (5% en los extremos del rango espectral)
0.55 µm entre 0.4 y 1 µm, en 288 bandas de 2 nm
TASI-600 ICC et al. ≈1 mrad 40º, 600 pixels -- NEdT 0.2º @ 300K
-- -- 32 bandas en 8µm-11.5 µm, ≈100 nm de anchura nominal.
compleja calibración
AVIRIS NASA 1 mrad 30º (614 pixels) -- 12 bits 10 nm, calibradas en 1 nm --
HyMap AIG-HyMap (Australia)
2.5 mrad 61º (512 pixels) -- 16 bitsSNR > 500
ganancia fija -- 126 bandas entre 0.45-2.5 µm, 16 nm amcho --
HRSC DLR 8 cm to 40 cm(7 µm pixel)
38º (5200 pixs) capciadad fotogramétrica
8-12 bit -- no calibrable 4 bandas (azul-verde-rojo-IR próximo) + pan "pushbroom" con varias líneas CCD
AISA EAGLEAISA HAWK
NERC (UK), otros
0.7 mrad 40º (1000 pixels) -- 12 bit tiempo de integración variable
calibración "de fábrica"
<244 bandas 0.4 y 0.97 µm, 2.9 nm ancho sistema comercial SpecIm
ALS50 Leica divergencia haz: 0.33 mradscanrate:<70 Hz
10 -> 75 º [X,Y]: 0.1-0.6 mZ: 0.1-0.4 m
-- -- -- -- LIDAR altimétrico comercial
APEX VITO 0.48 mrad 28º -- -- -- 2% 300 bands de 380 nm -> 2500 nm, 10 nm Pushbroomproyecto ESA
HySpex NEO (No)DLR
-- -- -- -- -- -- -- sistema comercial
HeadwallHyperspec
UAVs 1000 pixels -- 12 bit 60 dB -- 325 bandas VNIR , 2 nm FWHM peso 1 kg
Todas las magnitudes etiquetadas como L son radiancias expresadas en w m-2 sr-1 µm-1
EdM Plataformas "i" Sensores - 32
TELEDETECCION: PLATAFORMAS Y SENSORES
ANEJO 2: CARACTERÍSTICAS PRINCIPALES DE SENTINEL-2
(Fuente: http://esamultimedia.esa.int/docs/S2-Data_Sheet.pdf)
EdM Plataformas "i" Sensores - 33